
荷電粒子ビーム出射装置及び荷電粒子ビーム出射方法

【課題】治療照射中にイオンビームの出射をON/OFF制御する場合において、治療の安全性を向上する。
【解決手段】シンクロトロン4を有する荷電粒子ビーム発生装置1と、この荷電粒子ビーム発生装置1から出射されたイオンビームのブラッグピーク幅を形成するRMWと、このRMWの回転角度に基づいて荷電粒子ビーム発生装置1からの荷電粒子ビームの出射及び出射停止を制御するゲート信号生成装置37と、このゲート信号生成装置37による荷電粒子ビームの出射及び出射停止の制御が所望のタイミングで行われているかどうかを判定する照射制御・判定部66とを備える。
【解決手段】シンクロトロン4を有する荷電粒子ビーム発生装置1と、この荷電粒子ビーム発生装置1から出射されたイオンビームのブラッグピーク幅を形成するRMWと、このRMWの回転角度に基づいて荷電粒子ビーム発生装置1からの荷電粒子ビームの出射及び出射停止を制御するゲート信号生成装置37と、このゲート信号生成装置37による荷電粒子ビームの出射及び出射停止の制御が所望のタイミングで行われているかどうかを判定する照射制御・判定部66とを備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、陽子及び炭素イオン等の荷電粒子ビームを患部に照射して治療する荷電粒子ビーム出射装置及び荷電粒子ビーム出射方法に関する。
【背景技術】
【0002】
癌などの患者の患部に陽子及び炭素イオン等の荷電粒子ビーム(イオンビーム)を照射する治療方法が知られている。この治療に用いる粒子線出射装置(荷電粒子ビーム出射装置)は、荷電粒子ビーム発生装置、ビーム輸送系、及び照射装置を備えている。荷電粒子ビーム発生装置で加速されたイオンビームは、第1ビーム輸送系及び回転ガントリーに設けられた第2ビーム輸送系を経て回転ガントリーに設置された照射装置に達する。イオンビームは照射装置より出射されて患者の患部に照射される。荷電粒子ビーム発生装置としては、例えば、荷電粒子ビームを周回軌道に沿って周回させる手段、共鳴の安定限界の外側で荷電粒子ビームのベータトロン振動を共鳴状態にする手段、及び荷電粒子ビームを周回軌道から取り出す出射用デフレクタを備えたシンクロトロン(円形加速器)が知られている(例えば、特許文献1参照。)。
【0003】
イオンビームを用いた治療、例えば陽子ビームの患部への照射では、陽子ビームのエネルギーの大部分が、陽子が停止するときに放出される、すなわちブラッグピークが形成されるという特性を利用し、陽子ビームの入射エネルギーの選択により陽子を患部近傍で停止させてエネルギー(吸収線量)の大部分を患部の細胞にのみ与えるようにする。
【0004】
通常、患部は、患者の体表面からの深さ方向(イオンビームの進行方向でもあり、以下、単に深さ方向という)にある程度の厚みをもっている。その深さ方向における患部の厚み全域にわたってイオンビームを効果的に照射するためには、深さ方向においてある程度広いフラットな吸収線量範囲(拡大ブラッグピーク幅(spread-out Bragg peak)。以下、SOBP幅という。)を形成するように、イオンビームのエネルギーを調節しなければならない。
【0005】
このような観点から、従来、周方向に段階的に厚みが変化している複数の羽根部を回転軸の周囲に配置したレンジモジュレーション回転体(レンジモジュレーションホイール。以下、RMWという。)が既に提唱されている(例えば、非特許文献1の2077頁、図30参照。)。このRMWは、複数の羽根部が回転軸に取り付けられ、隣り合う羽根部の相互間に貫通する開口を有している。例えば、開口をイオンビームの経路(ビーム経路という)に位置させてRMWを回転させる。開口及び羽根部が交互にビーム経路を横切る。イオンビームが開口を通過したときはビームエネルギーが減衰しないため、ブラッグピークが体内の最も深い位置に生じる。イオンビームが羽根部を通過する際には、羽根部の厚みが厚い部分を通過するほど、このイオンビームのエネルギーの減衰度合いが大きくなり、患部の体表面に近い部分にブラックピークが形成される。RMWの回転によって、このようなブラッグピークが形成される深さ方向の位置が周期的に変動する結果、時間積分で見ると、患部の深さ方向において比較的広くフラットなブラッグピーク幅を得ることができる。また、SOBP幅の形成は、リッジフィルタを用いても可能であることが知られている(非特許文献1の2078頁、図31)。
【0006】
【特許文献1】USP5,363,008号
【非特許文献1】レビュー オブ サイエンティフィック インスツルメンツ64巻8号(1993年8月)のページ2074〜2084、図30〜図32(REVIEW OF SCIENTIFIC INSTRUMENTS VOLUME 64 NUMBER 8 (AUGUST 1993) P2074-2084 FIG.30-32)
【発明の開示】
【発明が解決しようとする課題】
【0007】
本願の3名の発明者のうちの1名が関与してなされた発明、すなわち、RMWが回転しているときに、シンクロトロンからのイオンビームの出射をON/OFF制御する荷電粒子ビーム出射装置の発明が出願されている。その発明では、RMWを回転させつつ、例えば比較的長い時間、すなわちRMWの広い回転角度の範囲にわたってイオンビームを通過させるようにすればイオンビームの減衰度合いが大きく変動することからSOBP幅は広くなり、比較的短い時間すなわちRMWの狭い回転角度の範囲にイオンビームを通過させるようにすればイオンビームの減衰度合いがあまり変動しないためSOBP幅は狭くなる。このように、RMWの回転時にイオンビームの出射をON/OFF制御することで、1つのRMWで多様なSOBP幅を得られるので、RMWの交換頻度を低減でき、多数の患者に対し、円滑に治療を行うことができる。
【0008】
しかしながら、本願発明者等によるその発明のその後の検討によれば、上記発明には以下のような更なる改善の余地があることが分かった。
すなわち、その発明によれば、各患者ごとにビーム出射のON/OFFを制御することによりその患者の患部に応じたSOBP幅を得ることができるものの、ビームのON/OFFが所望のタイミングで行われているかどうかをビーム照射中にリアルタイムに確認する手法が確立されてはいなかった。このため、治療の安全性の向上の観点において更なる改善の余地があった。
【0009】
本発明の目的は、治療照射中にイオンビームの出射をON/OFF制御する場合において、安全性を向上することができる荷電粒子ビーム出射装置及び荷電粒子ビーム出射方法を提供することにある。
【課題を解決するための手段】
【0010】
上記した目的を達成する本発明の特徴は、前記荷電粒子ビーム発生装置から出射された前記荷電粒子ビームの進行方向における厚みが変化し、通過する前記荷電粒子ビームのエネルギーを変えて前記照射対象内に拡大ブラッグピーク幅を形成させる回転体の回転角度に基づいて前記荷電粒子ビーム発生装置からの前記荷電粒子ビームの出射及び出射停止を制御する第1制御装置と、前記第1制御装置により前記荷電粒子ビームの出射及び出射停止の制御が所望のタイミングで行われているかどうかを判定する判定装置とを備えたことにある。
【0011】
本発明は、治療照射中に行われる荷電粒子ビームの出射及び出射停止の制御が所望のタイミングで行われているかどうかを判定するため、治療照射の安全性を向上することができる。
【0012】
好ましくは、荷電粒子ビームの出射及び出射停止の制御が所望のタイミングで行われていないと判定したときに、荷電粒子ビームの出射を停止するように制御する。これにより、照射対象に対する荷電粒子ビームを用いた治療の安全性を確実に向上することができる。
【発明の効果】
【0013】
本発明によれば、照射対象に対する荷電粒子ビームを用いた治療の安全性を向上することができる。
【発明を実施するための最良の形態】
【0014】
以下、本発明の実施の形態を図面を用いて詳細に説明する。
(実施形態1)
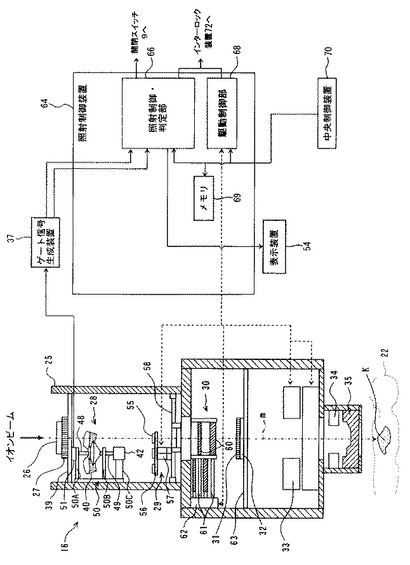
本発明の好適な一実施形態である荷電粒子ビーム出射装置を、図1を用いて説明する。本実施形態の荷電粒子ビーム出射装置24は、荷電粒子ビーム発生装置1、荷電粒子ビーム発生装置1の下流側に接続されたビーム輸送系2、及び照射野形成装置である照射装置16を備えている。本実施形態の荷電粒子ビーム出射装置24は、具体的には陽子線出射装置である。
【0015】
荷電粒子ビーム発生装置1は、イオン源(図示せず)、前段加速器(例えば線形加速器)3及び主加速器であるシンクロトロン4を有する。シンクロトロン4は、一対の電極によって構成された高周波印加装置5及び高周波加速空胴6をイオンビームの周回軌道上に設置している。第1高周波電源8が開閉スイッチ9、10を介して高周波印加装置5の電極に接続される。高周波加速空胴6に高周波電力を印加する第2高周波電源(図示せず)が、別途設けられる。イオン源で発生したイオン(例えば、陽イオン(または炭素イオン))は前段加速器3で加速される。前段加速器3から出射されたイオンビーム(荷電粒子ビーム)はシンクロトロン4に入射される。荷電粒子ビームであるイオンビームは、第2高周波電源からの高周波電力の印加によって高周波加速空胴6内に発生する電磁場に基づいてエネルギーを与えられて加速される。シンクロトロン4内を周回するイオンビームは、設定されたエネルギー(例えば100〜200MeV)まで加速された後、開閉スイッチ9を閉じることによってシンクロトロン4から出射される。すなわち、第1高周波電源8からの高周波が、開閉スイッチ9を閉じることによって、閉じられている開閉スイッチ10、及び開閉スイッチ9を通して高周波印加装置5より周回しているイオンビームに印加される。このため、安定限界内で周回しているイオンビームは、安定限界外に移行し、出射用デフレクタ11を通って出射される。イオンビームの出射の際には、シンクロトロン4に設けられた四極電磁石12及び偏向電磁石13に導かれる電流が電流設定値に保持され、安定限界もほぼ一定に保持されている。開閉スイッチ9(または開閉スイッチ10)を開いて高周波印加装置5への高周波電力の印加を停止することによって、シンクロトロン4からのイオンビームの出射が停止される。
【0016】
シンクロトロン4から出射されたイオンビームは、ビーム輸送系2により下流側のビーム経路17に輸送される。ビーム輸送系2は、四極電磁石14及び偏向電磁石15を備え、照射装置16に連絡されるビーム経路17に連絡される。照射装置16及びビーム経路17は、治療室(図示せず)内に設置された回転ガントリー(図示せず)に取り付けられている。四極電磁石18、偏向電磁石19及び偏向電磁石20がこの順にビーム経路17に設けられる。ビーム経路17内のイオンビームは、照射装置16へと輸送される。患者22が、回転ガントリー内に形成された治療ケージ(図示せず)内で位置決めされた治療用ベッド21に横たわっている。照射装置16から出射されたイオンビームは、その患者22の癌の患部K(後述の図2参照)に照射される。四極電磁石18等の電磁石を備えたビーム経路17はビーム輸送系であるとも言える。また、ビーム輸送系2の上流側にはビームシャッタ38が設けられている。このビームシャッタ38は通常開いているが、異常時には後述のインターロック装置72により閉じられ、シンクロトロン4からのイオンビームの出射を遮断する(詳細は後述)。
【0017】
照射装置16の構造を、図2を用いて説明する。この図2に示すように、照射装置16は、回転ガントリーに取り付けられ、ビーム経路17に接続されるケーシング25を有する。照射装置16は、ケーシング25内に、イオンビーム進行方向の上流側より順次、ビームプロファイルモニタ26,線量モニタ27,RMW装置28,第2散乱体装置29,飛程調整装置(例えば、レンジシフタ)30,線量モニタ31,平坦度モニタ32,ブロックコリメータ33,患者コリメータ34、及びボーラス35を、ケーシング25内のビーム経路(ビーム軸)m上に配置している。
【0018】
ビームプロファイルモニタ26は、ビーム輸送系2から照射装置16に入射されたイオンビームがビーム軸m上に位置しているかどうかを確認するモニタである。線量モニタ27は照射装置16に入射されたイオンビームの線量を検出するモニタである。これらビームプロファイルモニタ26及び線量モニタ27は、ケーシング25に取り付けられた支持テーブル39上に設置される。
【0019】
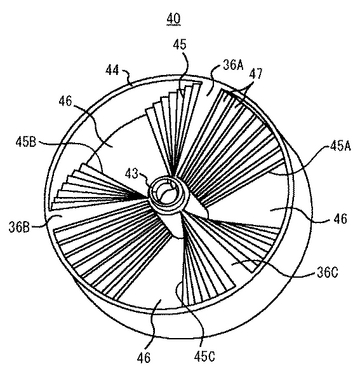
RMW装置28は、RMW(回転体)40、RMW40を回転させる回転装置(例えばモータ)42、及びRMW40の回転角度を検出する角度計51を有する。RMW40、回転装置42及び角度計51は、ケーシング25に設置された支持部材50によって保持される。図3に示すように、RMW40は、回転軸43、回転軸43と同心円状に配置された円筒部材44、及び回転軸43に取り付けられてRMW40の半径方向に伸び、他端が円筒部材44に取り付けられた複数の羽根部45(本実施例では羽根部45A,45B,45Cの3枚)を有している。これらの羽根部45の周方向における幅は回転軸43側の端部よりも円筒部材44側の端部で広くなっている。RMW40の周方向における羽根部45の相互間には、それぞれ開口46が形成されている。これら開口46の周方向における幅も円筒部材44の内面に近づくほど広くなるように形成されている。
【0020】
各羽根部45は、RMW40の周方向において階段状に配置された複数の平面領域(段部)47を有しており、回転軸43の軸方向(ビーム軸mの方向)におけるRMW40の底面から各平面領域47までの各厚みが異なっている。すなわち、RMW40の底面から各平面領域47までのレベルが異なる。ここでは、1つの平面領域47に対するその厚みを、平面領域部分の厚みという。すなわち、羽根部45は、周方向において羽根部45の両側に位置する開口46からビーム軸mの方向における最も厚みの厚い頂部36に位置する平面領域47に向かって各平面領域部分の厚みが階段状に増加している。各平面領域47は回転軸43から円筒部材44に向かって延びており、その周方向における幅も円筒部材44に近づくほど広くなっている。
【0021】
本来、RMWの羽根の厚みは連続的に変化するのが理想的な形状である。しかしながら、実際のRMWは、上記のように羽根部の厚みを階段状に変化するように、一般的に製作される。この理由は、SOBP生成特性と工作容易性との兼ね合いという観点によるものである。すなわち、羽根部の厚みを階段状に変化させることにより、理想的な形状に比較して若干のSOBP生成特性の低下と引き換えに、工作容易性(工作精度の確認容易性)を飛躍的に向上させることができる。
【0022】
図2に戻り、ケーシング25に設置される支持部材50は、ビーム軸mの方向に対向する支持部50A,50Bを有し、更に支持部50Bの下流側に支持部50Cを有する。これら支持部50A,50Bはそれぞれ回転軸48,49を回転可能に支持している。RMW40は支持部50A,50Bの間に挿入され、RMW40の回転軸43が回転軸48,49に挟まれるように支持される。すなわち、回転軸43は回転軸48,49に着脱可能に取り付けられ、RMW40が交換可能となる。回転軸48,49のそれぞれの端部が回転軸43に設けられた貫通孔内に挿入されている。なお、支持部50A,50Bはケーシング25内のビーム経路をさえぎらないように配置される。回転軸43,48,49もそのビーム経路からずれた位置に配置される。
【0023】
支持部50Cに設置された回転装置42が回転軸49に連結されている。RMW40の回転角度(回転位相)を検出する角度計51が、回転軸48に連結されて支持部50Aに取り付けられている。角度計51で検出されたRMW40の回転角度の測定値は、後述するゲート信号生成装置37に出力される。
【0024】
なお、本実施形態は、図2及び図3に図示していないが、RMW装置28と第2散乱体装置29との間で、ビーム軸m上に第1散乱体が設置されている。この第1散乱体も、ケーシング25に設置される。第1散乱体は、RMW40を通過したイオンビームをビーム軸mと直交する方向に広げる機能を有する。
【0025】
第2散乱体装置29は、複数の第2散乱体55,回転テーブル56及びモータ57を有している。モータ57は、ケーシング25に取り付けられる支持部材58に設置されている。イオンビームを散乱する度合いが異なる複数の第2散乱体55は回転テーブル56上に周方向に並んで設置される。回転テーブル56がモータ57により回転されることによって、所定の第2散乱体55がビーム軸m上に配置される。モータ57の駆動は駆動制御部68によって制御される。
【0026】
飛程調整装置30は、厚みの異なる複数の吸収体60(本実施の形態では4つ)、及び各吸収体60ごとに設けられた吸収体操作装置61を有する。この吸収体操作装置61としては、例えば圧縮空気により駆動するエアシリンダ等が用いられる。各吸収体操作装置61は吸収体駆動装置62によって駆動され、この吸収体駆動装置62は駆動制御部68によって制御される。
【0027】
線量モニタ31は、照射装置16に入射され、RMW装置28,第1散乱体、第2散乱体装置29及び飛程調整装置30を通過したイオンビームの線量を検出する。また、平坦度モニタ32は第1散乱体及び第2散乱体55によって散乱されたイオンビームのビーム軸mと垂直な方向における平坦度(線量一様度)を確認するモニタである。線量モニタ31及び平坦度モニタ32は支持テーブル63上に設けられている。
【0028】
ブロックコリメータ33は、イオンビームをビーム軸mと垂直な平面方向に整形してイオンビームの照射野を粗くコリメートする。ブロックコリメータ33の開口径は駆動制御部68によって可変に制御される。患者コリメータ34はイオンビームを患者22の患部Kの形状に合わせてさらに細かくコリメートするためのものである。ボーラス35は、治療患者22の患部K(例えば癌や腫瘍の発生部位)の最大深さに合わせてイオンビームの到達深度を調整するものであり、ビーム軸mに垂直な平面上の各位置における飛程を、照射目標である患部Kの深さ形状に合わせて調整するものである。
【0029】
荷電粒子ビーム出射装置24は、ゲート信号生成装置(第1制御装置)37と、照射制御装置64とを備える。照射制御装置64は、照射制御・判定部(判定装置、第3制御装置)66、駆動制御部68及びメモリ69を有する。
【0030】
ゲート信号生成装置37は、角度計51から入力されたRMW40の回転角度に応じて、ゲート信号(第1制御信号)を生成し出力する。具体的には、角度計51が有しRMW40と同期して回転する図示しないエンコーダが出力する出力パルスを入力してカウントし、その出力パルスのカウント値が、ゲート信号生成装置37内の図示しないメモリ等に予め記憶されたゲート信号の出力がON又はOFFするタイミングに相当するエンコーダ出力パルスのカウント目標値に一致すると、ゲート信号の出力をON又はOFFする。また、ゲート信号生成装置37は、RMW40が1回転するごとに上記ゲート信号の出力タイミングの基準となる基準信号(パルス信号)を出力する。すなわち、上記ゲート信号の場合と同様に、ゲート信号生成装置37には予め基準信号の出力タイミングに相当するエンコーダ出力パルスのカウント目標値が記憶されており、出力パルスのカウント値が当該カウント目標値に一致すると基準信号を出力する。なお、この図2ではゲート信号生成装置37を照射制御装置64とは別個に設けたように図示しているが、例えば照射制御装置64の一機能としてもよい。
【0031】
照射制御・判定部66は、上記ゲート信号生成装置37から出力されるゲート信号を入力し、そのゲート信号出力のON又はOFFが所望のタイミングで行われているかどうかの判定を行う。正常であると判定した場合には、ゲート信号に基づいてSOBP幅を形成するための荷電粒子ビーム発生装置1からのイオンビームの出射のON・OFF制御を行う。異常であると判定した場合には、荷電粒子ビーム発生装置1からのイオンビームの出射を停止すると共に、インターロック装置72を介してビームシャッタ38を閉じるように制御する。駆動制御部68は、第2散乱体装置29のモータ57、飛程調整装置30の吸収体駆動装置62、及びブロックコリメータ33のそれぞれの駆動を制御する。メモリ69は、後述するゲート信号の出力ON/OFFのタイミング判定を行うための各種目標値や、中央制御装置70から出力された照射条件情報を記憶する。更に、荷電粒子ビーム出射装置24はインターロック装置72(図1参照)を備える。
【0032】
以上の構成を有する荷電粒子ビーム出射装置24は、RMW40の回転角度に応じて荷電粒子ビーム発生装置1からのイオンビームの出射ON/OFFを制御することにより、複数のSOBP幅を生成することができる。以下、この原理を、図4、図5及び図6を用いて説明する。
【0033】
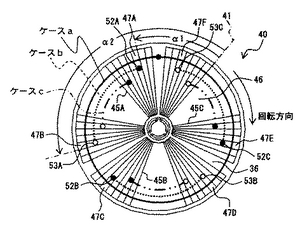
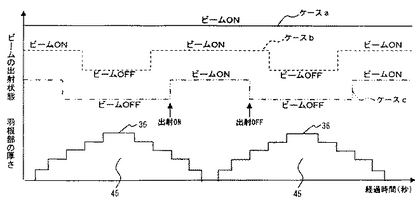
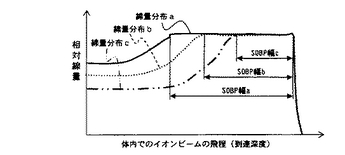
イオンビームがRMW40の開口46を通過したときは、ビームエネルギーは減衰しないためブラッグピークが体表面から深い第1の位置に形成される。羽根部45のうち最も厚みが厚くなる頂部36に位置する平面領域47をイオンビームが通過したときは、ビームエネルギーが最も大きく減衰されてブラックピークが体表面近くの浅い第2の位置に形成される。イオンビームが開口46と頂部36の間に位置する平面領域47を通過したときは、その平面領域47が位置する部分の厚みに応じてビームエネルギーが減衰するため、ブラッグピークは第1位置と第2位置の間に存在する第3の位置に形成される。したがって、図4及び図5におけるケースaのように、RMW40の周方向において、360°の全回転角度領域において常にビームONである場合には、RMW40の回転によりブラッグピークは第1位置と第2位置との間で周期的に変動する。この結果、ケースaは、時間積分で見ると、図6に示す深さ方向の線量分布aのように体表面近くから深い位置に至る比較的広いSOBP幅を得ることができる。「ビームON」は、イオンビームがシンクロトロン4から出射されてRMW40を通過し照射装置16から出射される状態を意味する。これに対し、「ビームOFF」は、イオンビームがシンクロトロン4から出射されず照射装置16から出射されない状態を意味する。
【0034】
図4及び図5におけるケースbは、RMW40の周方向において、各羽根部45の比較的厚い領域(頂部36付近)ではビームOFFとし、これ以外の回転角度領域ではビームONとする。ケースbは、体表面近くの浅い部分で生じるブラッグピークがなくなるため、図6に示す深さ方向の線量分布bのように線量分布aよりもフラット部分が狭くなったSOBP幅が形成される。
【0035】
図4及び図5におけるケースcは、RMW40の周方向において、開口46及び開口46付近の各羽根部45の厚みが比較的薄い領域にてビームONとし、これら以外の回転角度領域ではビームOFFとする。ケースcは、全体にビームエネルギーの減衰量が少ないため、体表面から深い位置にブラッグピークが形成される。このため、ケースcは、図6に示す深さ方向の線量分布cのように線量分布bよりもフラット部分が狭くなったSOBP幅が形成される。
【0036】
荷電粒子ビーム出射装置24は、以上のようにRMW40の回転角度に応じてイオンビームの出射ON/OFF制御を行うことにより、1つのRMWで複数の異なるSOBP幅を形成することができる。
【0037】
RMW40の回転時にイオンビームの出射ON/OFF制御を行うことにより種々のSOBP幅を形成できることは、後述するように、非常にメリットがある。しかしながら、イオンビームの出射のON/OFF制御が実際に所望のタイミングで行われているかどうかを確認できることは、イオンビームを用いた治療の安全性を高めるためにも、荷電粒子ビーム出射装置に要求される重要な要件の1つである。発明者らは、この課題を解決するために種々の検討を行った。この発明者らの検討結果を、以下に説明する。
【0038】
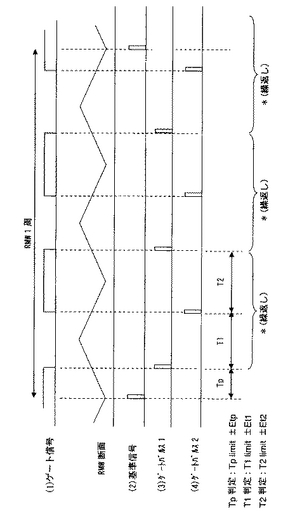
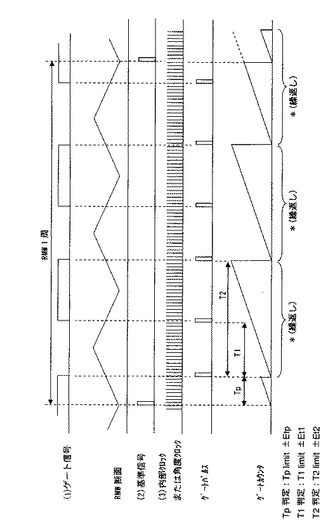
図7はRMW40の回転とゲート信号の関係を示す図である。なお、図5までの説明においてRMWの羽根部の厚みは階段状に変化しているが、これは先に述べたように容易に工作精度を確保することからの制約によるものである。図7以降の説明においては、RMWの羽根部は、厚みが理想的に直線状に変化する山形の断面形状になっているとして説明する。羽根部の断面が山形であることと前述のように厚みが階段状に変化することは、説明上、本質的な差異は生じない。RMW40は先の図3において説明したように3つの羽根部45A,45B,45Cの3枚を有しており、その断面は図7に示すように周方向に略3つの山形を有する形状となる。図の例では3つの山(羽根部で最も厚みが厚い部分)と谷(厚みがゼロの部分(図4で開口46の部分))がある。ゲート信号は先の図4において説明したケースbのように谷を中心に一定の範囲でONとなるように制御されるものとする。ゲート信号生成装置37から入力されるゲート信号がONである場合、後述する判定に異常がなければ照射制御・判定部66は開閉スイッチ9に出射開始信号を出力し、開閉スイッチ9を閉じて第1高周波電源8からの高周波を高周波印加装置5より周回しているイオンビームに印加させる。また、ゲート信号生成装置37から入力されるゲート信号がOFFである場合、照射制御・判定部66は開閉スイッチ9に出射停止信号を出力し、開閉スイッチ9を開き第1高周波電源8からの高周波が高周波印加装置5よりイオンビームに印加されるのを停止する。
【0039】
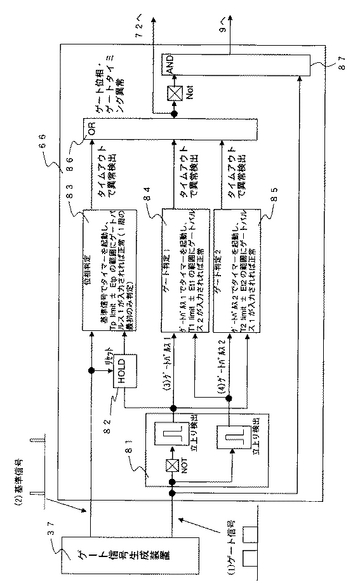
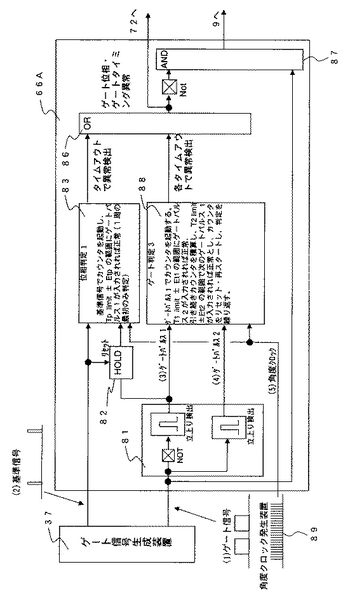
次に、照射制御・判定部66で行われるゲート信号のON/OFFタイミング(以下、単にゲートタイミングという。)の判定機能について図8を用いて説明する。図8は照射制御・判定部66の判定機能を表す機能ブロック図である。この図8に示すように、照射制御・判定部66には、ゲート信号生成装置37からゲート信号(図8中(1))及び基準信号(図8中(2))が入力される。ゲート信号生成装置37から入力された基準信号は位相判定回路83に入力され、これにより位相判定回路83は図示しないタイマ(タイマー装置)を起動する。一方、入力されたゲート信号は、入力処理回路81によりゲート信号の立ち下がり又は立ち上がりが検出される。立ち下がりが検出された場合(ここでは否定(Not)を経由して立ち上がりが検出された場合)には、入力処理回路81からゲートパルス1信号(図8中(3))がホールド回路82を介して上記の位相判定回路83に入力され、時間Tpの判定が行われる。時間Tpとは基準信号からゲート信号の最初の立ち下がりまでの時間である(図7参照)。すなわち、位相判定回路83では、基準信号からゲート信号の最初の立ち下がりまでの時間Tpを目標値と比較することにより、ゲート信号全体とRMW40の回転との位相差の判定が行われる。具体的には次式(i)を満たせば正常と判定される。
【0040】
Tp判定:Tp = Tp limit ± Etp ・・・(i)
ここで、Tp limitはTpの目標値、EtpはTpの許容値であり、例えば照射制御装置64のメモリ69に予め記憶された値である。なお、ホールド回路82は基準信号でリセットされるまで状態を保つため、Tp判定はRMW40の1周に1回だけ、基準信号直後のゲートパルス1に対してのみ行われる。
【0041】
また、入力処理回路81からのゲートパルス1信号(図8中(3))はゲート判定1回路84にも入力される。その後、立ち上がりが検出された場合には、入力処理回路81からゲートパルス2信号(図8中(4))がゲート判定1回路84に入力され、時間T1の判定が行われる。時間T1とはゲートパルス1信号からゲートパルス2信号までの時間(すなわちゲート信号の出力がOFFの時間)である(図7参照)。すなわち、ゲート判定1回路84では、ゲートパルス1信号からゲートパルス2信号までの時間T1を目標値と比較することにより、ゲート信号がOFFとなるべき時間T1を判定する。具体的には次式(ii)を満たせば正常と判定される。
【0042】
T1判定:T1 = T1 limit ± Et1 ・・・(ii)
ここで、T1 limitはT1の目標値、Et1はT1の許容値であり、例えば照射制御装置64のメモリ69に予め記憶された値である。RMW40の羽根部45の構造は回転対称であるので、RMW40が1周する間、羽根部45ごとに繰り返して判定を行う。
【0043】
また、入力処理回路81からのゲートパルス2信号(図8中(4))はゲート判定2回路85にも入力される。その後、立ち下がりが検出された場合には、入力処理回路81からゲートパルス1信号(図8中(3))がゲート判定2回路85に入力され、時間T2の判定が行われる。時間T2とはゲートパルス2信号からゲートパルス1信号までの時間(すなわちゲート信号がONの時間)である(図7参照)。すなわち、ゲート判定2回路85では、ゲートパルス2信号からゲートパルス1信号までの時間T2を目標値と比較することにより、ゲート信号がONとなるべき時間T2を判定する。具体的には次式(iii)を満たせば正常と判定される。
【0044】
T2判定:T2 = T2 limit ± Et2 ・・・(iii)
ここで、T2 limitはT2の目標値、Et2はT2の許容値であり、例えば照射制御装置64のメモリ69に予め記憶された値である。RMW40の羽根部45の構造は回転対称であるので、RMW40が1周する間、羽根部45ごとに繰り返して判定を行う。
【0045】
以上の各判定回路83,84,85のいずれかで判定が満たされなかった場合には、異常信号がOR回路86で合成され、ゲート位相・ゲートタイミング異常検出信号が生成される。本信号は否定(Not)を経由して後段のAND回路87に入る。このAND回路87により、ゲートタイミングが正常であるときのみゲート信号生成装置37からのゲート信号をビーム出射開始信号又はビーム出射停止信号として開閉スイッチ9に与え、ビーム出射のON/OFF制御を行うことができる。一方、各判定回路83,84,85のいずれかでゲートタイミングに異常が検出された場合、開閉スイッチ9にゲート信号は出力されない(すなわちビーム出射停止信号が出力される)。これにより、開閉スイッチ9が開き、シンクロトロン4からのビーム出射が停止する。同時に、インターロック装置72に対してインターロック信号が出力され、これによりインターロック装置72がビームシャッタ38を閉じてビームが照射装置16側に輸送されることを防止する。
【0046】
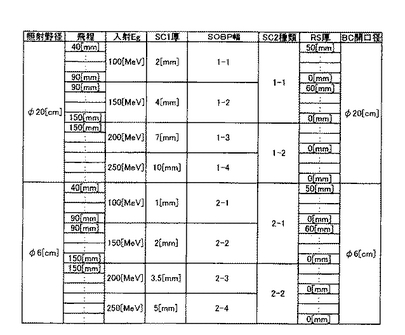
荷電粒子ビーム出射装置24による治療開始前に、医者は、X線CT装置(図示せず)によって得られた患者22の患部K付近の断層像を用いて診断を行い、患部Kの位置及びサイズを把握すると共に、イオンビームの照射方向、最大照射深さ等の情報を治療計画装置71に入力する。治療計画装置71は、治療計画ソフトによって、入力されたイオンビームの照射方向、最大照射深さ等に基づき、SOBP幅、照射野径及び患部Kに対する目標線量等を算出する。さらに、治療計画装置71は、各種運転パラメータ(シンクロトロン4から出射されるイオンビームのエネルギー(照射装置16への入射エネルギー)、回転ガントリー角度、及びイオンビームの出射ON/OFF時におけるRMW40の各回転角度)を算出すると共に、治療に適切なRMW40を選定する。回転角度及び目標線量、さらに、図9に示された照射野径、飛程、入射エネルギー(入射Eg)、第1散乱体の厚み(SC1厚)、SOBP幅、第2散乱体55の種類(SC2種類)、飛程調整装置30におけるビーム経路に位置させる吸収体60の厚み(RS厚)及びブロックコリメータ33の開口径(BC開口径)等の上記した治療計画情報が、荷電粒子ビーム出射装置24の中央制御装置70に入力され、中央制御装置70の記憶装置(図示せず)に記憶される。以上に述べた各治療計画情報は、中央制御装置70から照射制御装置64のメモリ69に記憶される。
【0047】
ガントリー制御装置(図示せず)は、メモリ69より入力した回転ガントリー角度情報に基づいて、照射装置16のビーム経路がその角度で患者22を向くように、回転ガントリーを回転させる。患者が横たわっている治療用ベッド21を移動させて患部Kが照射装置16のビーム経路の延長線上に位置するように、治療用ベッド21の位置決めがなされる。
【0048】
照射制御装置64の駆動制御部68は、メモリ69に記憶された照射野径、飛程及び入射エネルギーの各情報を用いて、メモリ69に予め記憶されている図9に例示したような照射条件情報から、第1散乱体の厚み、SOBP幅、第2散乱体の種類、吸収体の厚み、及びブロックコリメータ開口径を選定する。駆動制御部68は、第1散乱体の厚みの情報に基づいて、ビーム軸m上に位置するようにその厚みの第1散乱体を移動させる。駆動制御部68は、選定された第2散乱体55がビーム軸m上に位置するようにモータ57を駆動して回転テーブル56を回転させる。また、駆動制御部68は、選定された吸収体60がビーム軸m上に位置するように吸収体駆動装置62を介して吸収体操作装置61を操作する。駆動制御部68は、選定されたブロックコリメータ33の開口径情報に基づき、図示しない駆動装置を制御し、ブロックコリメータ33の各ブロックを駆動し、その開口径を所定の径にする。
【0049】
各種の治療計画情報は、荷電粒子ビーム出射装置24の制御室内に設置された表示装置に表示される。治療を受ける患者22に対するRMW40、ボーラス35及び患者コリメータ34が、作業員によって、照射装置16のケーシング25内に図2に示すように設置される。
【0050】
照射制御装置64の照射制御・判定部66は、治療する患者22に対する、ケーシング25内に設置したRMW40の回転角度情報(例えば、後述のα1〜α6)、目標線量、及び前述したTp判定、T1判定、T2判定で用いる目標値Tp limit, T1 limit, T2 limit及び許容値Etp, Et1, Et2等をメモリ69から読み出す。
【0051】
荷電粒子ビーム出射装置24を用いた患部Kの治療について、以下に説明する。シンクロトロン4は、前段加速器3からのイオンビームの入射、イオンビームの加速、イオンビームの出射、及び減速を繰り返して運転される。設定エネルギーである出射エネルギーまでイオンビームが加速されると、イオンビームの加速が終了し、イオンビームがシンクロトロン4から出射可能な状態(イオンビームの出射可能な状態)になる。イオンビームの加速終了情報は、シンクロトロン4の電磁石等の状態をセンサ(図示せず)で監視している電磁石電源制御装置から中央制御装置70に伝えられる。
【0052】
荷電粒子ビーム出射装置24における前述したSOBP幅形成のためのイオンビームの出射ON/OFFに係る制御を、図1、図2、図4及び図10を用いて説明する。以下におけるイオンビームの出射ON/OFFに係る制御は、図5におけるケースbの一例に基づいて説明する。このケースbの一例では、黒丸の点52A、52B及び52Cがイオンビームの出射ON(出射開始)時点であり、白丸の点53A、53B及び53Cがイオンビームの出射OFF(出射停止)時点である。照射制御・判定部66は、ケースbの制御を行うに際して、回転角度の設定値である回転角度α1〜α6(α3〜α6は図示せず)を、メモリ69から入力する。回転角度α1は基準線41から点52Aまでの角度であり、回転角度α2は基準線41から点53Aまでの角度であり、回転角度α3は基準線41から点52Bまでの角度であり、回転角度α4は基準線41から点53Bまでの角度であり、回転角度α5は基準線41から点52Cまでの角度であり、回転角度α6は基準線41から点53Cまでの角度である。回転角度α1〜α6は、基準線41がビーム軸mに位置するときを基準にした角度を示している。図4において、黒丸の位置がイオンビームの出射を開始する位置であり、白丸の位置がイオンビームの出射を停止する位置である。
【0053】
照射制御・判定部66は、図10に示す制御フローに基づいてイオンビームの出射ON/OFFに係る制御を実行する。まず、加速器(シンクロトロン4)の加速終了信号(イオンビームが出射可能な状態になったことを示す信号)を入力する(ステップ73)。この加速終了信号は中央制御装置70から入力される。回転装置42に回転開始信号を出力する(ステップ74)。回転装置42は回転開始信号に基づいて回転される。回転装置42の回転力は回転軸49を介して回転軸43に伝えられ、RMW40が回転される。RMW40の回転数は1秒間当り100〜200回転の範囲内の回転数に設定される。回転角度の計測値が回転角度の第1設定値と一致するかが判定される(ステップ75)。角度計51で計測されたRMW40の回転角度の計測値は、ゲート信号生成装置37に入力される。この計測値が出射開始信号を出力するための回転角度の第1設定値(回転角度α1、α3及びα5のいずれか)と一致するかが判定される。回転角度の計測値が第1設定値と一致した場合は、ゲート信号生成装置37から照射制御・判定部66にゲート信号が出力され、前述したTp判定、T1判定、T2判定によりゲートタイミングが正常であると判定された場合には、照射制御・判定部66から出射開始信号が出力される(ステップ76)。この出射開始信号によって、開閉スイッチ9が閉じられる。開閉スイッチ10は閉じている。第1高周波電源8から出力された高周波が高周波印加装置5より周回しているイオンビームに印加されるため、イオンビームがシンクロトロン4から出射される。このイオンビームは、照射装置16に輸送される。
【0054】
このイオンビームは、照射装置16内でビーム軸mに沿って進行する。イオンビームは、ビームプロファイルモニタ26、線量モニタ27を通過する。そして、回転しているRMW40を通過したイオンビームは、第1散乱体によりビーム軸mに直交する方向に拡大される。その後、イオンビームは、第2散乱体55により上記直交する方向で線量分布が平坦化され、飛程調整装置30の吸収体60を通過してエネルギーを減少されて患者22の体内における飛程が調整される。吸収体60を通過したイオンビームは、線量モニタ31で線量を計測され、平坦度モニタ32でビーム軸m方向に垂直な方向における平坦度が確認される。イオンビームは、さらに、ブロックコリメータ33、患者コリメータ34及びボーラス35を通過して、患部Kに照射される。
【0055】
患部Kに照射された線量が目標線量に到達したかが判定される(ステップ77)。また、回転角度の計測値が回転角度の第2設定値と一致するかが判定される(ステップ78)。線量モニタ31によって測定された患部Kに照射される線量は、常に照射制御・判定部66に入力されている。ステップ77においては、線量モニタ31によって測定された線量計測値の累積値が目標線量になったかが判定される。この判定結果が「YES」の場合には、ステップ78の処理に優先してステップ82の処理が実行され、照射制御・判定部66から開閉スイッチ9に出射停止信号が出力される。このビーム出射停止信号によって、開閉スイッチ9が開き、高周波印加装置5への高周波の供給が停止される。このため、シンクロトロン4からのイオンビームの出射が停止される。治療用ベッド21上の患者22に対するイオンビームの照射が終了する。回転装置42に停止信号を出力する(ステップ83)。回転装置42の回転が停止し、RMW40の回転も停止する。
【0056】
ステップ77の判定が「NO」である場合には、ステップ78の処理が実行される。ステップ78において、ゲート信号生成装置37により回転角度の計測値が出射停止信号を出力するための回転角度の第2設定値(回転角度α2、α4及びα6のいずれか)と一致したと判定された場合には、ゲート信号生成装置37から照射制御・判定部66に出力されるゲート信号がOFFとなる。これにより、照射制御・判定部66から出射停止信号が出力される(ステップ79)。出射停止信号の出力により、上記したように開閉スイッチ9が開き、シンクロトロン4からのイオンビームの出射が停止される。ステップ76の出射開始信号の出力からステップ79の出射停止信号の出力までの期間は、例えば、羽根部45Aの平面領域47Aから羽根部45Bの平面領域47Bが、イオンビームが通るビーム軸mを横切る期間であって、実質的にビームONの期間である。開閉スイッチ9が閉じてシンクロトロン4からイオンビームが出射されるまでに要する時間は1/1000秒以下であり、逆に開閉スイッチ9が開いてイオンビームの出射が停止されるまでに要する時間も1/1000秒以下である。
【0057】
ステップ80で、再度、線量モニタ31からの検出信号を基に得られた患部Kに照射された線量が目標線量に到達したかが判定される。この判定結果が「NO」の場合には、ステップ81の処理が実行される。すなわち、上記したビームONの期間が終了した後、シンクロトロン4内にイオンビームが十分に存在するかを判定する。このイオンビームの存在量(イオンビームの電流密度)は、電磁石電源制御装置がシンクロトロン4に設けられたセンサ(図示せず)の計測値を基に監視している。イオンビームの電流密度の計測値は、中央制御装置70を介して照射制御・判定部66に入力されている。ステップ81の判定は、電流密度の計測値を用いて行われる。判定結果が「YES」の場合には、ステップ75〜80の処理が実行される。この繰り返し処理における、ステップ76の出射開始信号の出力からステップ79の出射停止信号の出力までの期間は、例えば、羽根部45Bの平面領域47Cから羽根部45Cの平面領域47Dがビーム軸mを横切る期間であって、実質的にビームONの期間である。次のステップ75〜80の繰り返し処理における、羽根部45Cの平面領域47Eから羽根部45Aの平面領域47Fがビーム軸mを横切る期間も、実質的にビームONの期間である。2つのビームONの期間の間には、図5に示すようにビームOFFの期間が存在する。ステップ75〜80の繰り返し処理時に、ステップ77または80で、線量計測値の累積値が目標線量になったと判定されると、ステップ83の処理が行われて患者22へのイオンビームの照射は終了する。
【0058】
ステップ81の判定が「NO」の場合には、ステップ73からの処理が実行される。すなわち、シンクロトロン4内を周回しているイオンビームの電流密度が低下してイオンビームの出射が不可能な場合には、シンクロトロン4を減速させる。電磁石電源制御装置がシンクロトロン4及びビーム輸送系2等に設けられた電磁石に供給する電流値を低下させる。それらの電磁石に供給される電流値がイオンビームの入射状態に保持される。イオンビームが前段加速器3からシンクロトロン4に入射される。このイオンビームは前述のように出射エネルギーになるまで加速される。イオンビームの加速終了後にステップ73からの処理が、照射制御部66で実行される。
【0059】
ステップ76とステップ78の間でステップ77の判定を行うため、イオンビームが回転しているRMW40を通過している間に、線量計測値の累積値が目標線量になったとき、イオンビームの出射を停止することができる。したがって、患部Kにイオンビームが過大に照射されることを防止できる。例えば、図4において、羽根部45Aと羽根部45Bとの間に位置する開口46がビーム軸mの位置に存在するときにステップ77で「YES」と判定された場合には、イオンビームの出射を停止できる。このため、その開口46がビーム軸mに位置してから回転角度の第2設定値に対する点53Aがビーム軸mに位置するまでの間におけるイオンビームの患部Kへの照射を停止できる。
【0060】
上記したケースbの一例においては、点52Aから点53Aまでの領域、点52Bから点53Bまでの領域及び点52Cから点53Cまでの領域はRMW40におけるイオンビーム通過領域である。点53Aから点52Bまでの領域、点53Bから点52Cまでの領域及び点53Cから点52Aまでの領域はRMW40におけるイオンビームの通過しない領域(イオンビーム非通過領域)である。ケースbの一例について説明したが、1つのRMW40に対して、出射開始信号を出力するための回転角度の第1設定値、及び出射停止信号を出力するための回転角度の第2設定値を変えることにより種々のSOBP幅を形成することができる。図5に示す各「ビームON」は開口46をイオンビームが通過しているが、イオンビームが開口46を通過せず頂部36を通過させるように制御することも可能である。照射制御・判定部66は、例えば、図4において、点53Cがビーム軸mに到達したときに出射開始信号を出力し、点52Aがビーム軸mに到達したときに出射停止信号を出力する。
【0061】
以上に述べた照射制御・判定部66によるイオンビームの出射ON/OFF制御により、治療計画で定めた、患者22に対する所望のSOBP幅を患部Kに形成することができる。
【0062】
イオンビームを照射装置16から出射している間、駆動制御部68は、第2散乱体装置29,飛程調整装置30、及びブロックコリメータ33の機器状態情報をそれぞれリアルタイムに(又は例えば一定周期おきに)入力する。それらの機器状態情報は、それらの機器に設置したセンサ(図示せず)で検出される。駆動制御部68はこれらの機器状態情報がメモリ69から読み出し第2散乱体の種類、吸収体の厚み、及びブロックコリメータ開口径の情報のうち該当する情報と一致するかを判定する。一致しない機器状態情報がある場合、すなわちその判定が「NO」である場合には、駆動制御部68はインターロック装置72にインターロック信号を出力する。インターロック装置72は、そのインターロック信号に基づいて開閉スイッチ10を開く。このため、開閉スイッチ9が閉じた状態であっても、第1高周波電源8からの高周波の高周波印加装置5への供給が停止され、シンクロトロン4からのイオンビームの出射が停止される。なお、その判定が「YES」である場合には、インターロック装置72は開閉スイッチ10を開かないため、開閉スイッチ9が閉じられていると、シンクロトロン4からのイオンビームの出射が継続される。
【0063】
照射制御・判定部66は、ゲート信号生成装置37から出力されるゲート信号のON/OFFのタイミングが所望のタイミングであるかどうかを判定する。この詳細について以下に説明する。照射制御・判定部66には、ゲート信号生成装置37から出力される基準信号及びゲート信号が入力される。これら基準信号及びゲート信号は、イオンビームを患者22に照射している間、リアルタイムに(又は例えば一定周期おきに)照射制御装置64の照射制御・判定部66に入力される。照射制御・判定部66の位相判定回路83、ゲート判定1回路84及びゲート判定2回路85は、入力した基準信号及びゲート信号に基づいてそれぞれタイマを起動し、カウントした時間Tp(ゲート信号全体とRMW40の回転との位相差に相当する時間)、T1(ゲート信号がOFFである時間)、T2(ゲート信号がONである時間)とメモリ69に記憶されているそれぞれの目標値(許容範囲を含む)Tp limit ± Etp, T1 limit ± Et1, T2 limit ± Et2とを比較する。時間Tp,T1,T2のうち1つでも許容範囲に入っていない場合には、所望のタイミングでゲート信号がON/OFFされていないとみなし、照射制御・判定部66はビーム出射停止信号を開閉スイッチ9に出力する。この出射停止信号の出力により、開閉スイッチ9が開き、シンクロトロン4からのイオンビームの出射が停止される。また照射制御・判定部66はインターロック信号(ゲート位相・タイミング異常信号)をインターロック装置72に出力し、ビームシャッタ38を閉じる。これにより、シンクロトロン4からのイオンビームの出射を確実に停止することができる。
【0064】
一方、時間Tp,T1,T2が全て許容範囲に入っている場合には、所望のタイミングでゲート信号がON/OFFされているとみなし、照射制御・判定部66はゲート信号をそのまま開閉スイッチ9に出力する(すなわち出射開始信号及び出射停止信号を通常通り出力する)。これにより、患者22へのイオンビームの照射が継続される。このイオンビームの照射は、前述したように線量モニタ31の検出信号を基に得られた線量が目標線量に達するまで行われる。なお、照射制御・判定部66から出力されたゲート位相・タイミング異常信号は、表示装置54に表示される。但し、正常な場合にもその旨を表示するようにしてもよい。
【0065】
本実施形態の荷電粒子ビーム出射装置24によれば、RMW40を回転させた状態でイオンビームをON/OFF制御するため、回転方向において、RMW40内でイオンビームが通過する領域を、RMW40の回転方向において、変化させることができる。このため、1つのRMW40で、患者22の体表面からの深さ方向で異なる幅を有する複数のSOBP幅を形成することができ、1つのRMW40を複数の患者に使用することができる。すなわち、1つのRMW40を用いて治療できる患者数が増加する。また、1つのRMW40を用いて、複数のSOBP幅を形成することができるため、荷電粒子ビーム出射装置24を有するがん治療センタで準備するRMWの個数が低減できる。1つのRMW40で複数のSOBP幅を形成できることは、照射装置16に設置されたRMWの交換回数が減少する。これは、治療の準備に要する時間が短縮されることになり、荷電粒子ビーム出射装置24における患者の治療人数が増加できる。特に、本実施形態は、イオンビームのON/OFF制御をRMW40の回転角度(具体的には回転角度の計測値及び設定値)に基づいて行っているため、特定のSOBP幅を精度良く形成することができる。ビームのON/OFF制御を行うRMWの回転角度を変えることによって、種々のSOBP幅を形成することができる。
【0066】
シンクロトロン4では、加速されるイオンの数が同じであるため、ビームONの期間を短縮しても、第1高周波電源8から高周波印加装置5に供給する出射用の高周波のパワーを増加することによって、ビームONの期間中にシンクロトロン4から出射されるイオンビームの電流密度を増大できる。このため、ビームONの期間が短くても患者に照射される線量率(単位時間当りで単位体積当りに照射される放射線量)を増大できる。厚さの薄い患部K、または体積が小さい患部Kを有する患者22に対しては、電流密度が増大されたイオンビームを照射することによってイオンビームの照射時間を短縮できる。この照射時間の短縮は、患者22の負担を軽減でき、1年間当りの治療人数を増加できる。ビームONの期間を短縮する場合でも、出射用の高周波のパワーを前述のように増大することによって、周回する全てのイオンビームを実質的にシンクロトロン4から出射させることができるため、シンクロトロン4等の機器の放射化の度合いが低下する。
【0067】
加速器としてシンクロトロンの代りにサイクロトロンを用い、サイクロトロンから出射されたイオンビームを照射装置16に導くことが考えられる。しかしながら、サイクロトロンは、シンクロトロンのように減速工程がなく、イオンビームの入射、加速及び出射の各工程を連続して行うため、「ビームON」の期間を短くすると、単位時間当りに照射装置16から出射されるイオンの数が減少する。しかしながら、患部Kに対する線量率は変わらない。これは、SOBP幅を減少させる、つまり、照射体積を減らしていることと等価である。この結果、「ビームON」の期間を短くしても、厚さの薄い患部K、または体積が小さい患部Kを有する患者22に対しては、イオンビームの照射時間が変わらない。サイクロトロンにおいて「ビームOFF」をイオンビームの加速過程または加速後に行えば、捨てられるイオンビーム量が多くなり、サイクロトロン等の機器の放射化が増加する。
【0068】
本実施形態の荷電粒子ビーム出射装置24によれば、ゲート信号生成装置37からのゲート信号のON/OFF、すなわちシンクロトロン4からのビーム出射のON/OFFが所望のタイミングで行われているかどうかを、イオンビームの照射中にリアルタイムに確認することができる。そして、ゲート信号のON/OFFが所望のタイミングで行われていない場合には、イオンビームの出射を停止できるので、治療計画で設定したSOBP幅と異なる異常なSOBP幅が患者22内で形成されることを避けることができる。このため、イオンビームによる治療の安全性が著しく向上する。さらに本実施形態によれば、ゲート信号のON/OFFが所望のタイミングで行われていない場合には、イオンビームの出射を停止すると共にビームシャッタ38を閉じる。これにより、シンクロトロン4からのビームの出射を確実に停止することができる。このように、本実施形態では異常発生時のビーム停止手段を2重に設けているため、患者への誤照射が確実に避けられ、高い安全性が得られる。
【0069】
また本実施形態では、前述したように、検出された、第1散乱体、第2散乱体装置29、飛程調整装置30の機器状態情報に異常がなければ、ゲート信号のON/OFF、すなわちシンクロトロン4からのビーム出射のON/OFFが所望のタイミングで行われている場合には、所望のSOBP幅が形成されていることになる。したがって、上記機器状態が正常である場合には、本実施形態により、RMW40に対するビームON/OFF制御により形成された実SOBP幅が、所望のSOBP幅設定値であるか否かをイオンビームの照射中にリアルタイムに確認することができる。
【0070】
さらに本実施形態によれば、照射制御・判定部66から出力されたゲート位相・タイミング異常信号が表示装置54に表示されるため、医者(または放射線技師)はビームON/OFFのタイミングの異常(すなわち患者22内で形成されているSOBP幅の異常)を確認できる。このため、万が一、表示装置54にゲート位相・タイミング異常が表示されているにも拘わらず、インターロック装置72等の異常により、シンクロトロン4からのイオンビームの出射が停止されない場合には、医者(または放射線技師)は制御室内のオペレータコンソール(図示せず)に設けられたビーム出射停止ボタンを押すことにより、開閉スイッチ10を開くことができる。すなわち、手動でシンクロトロン4からのイオンビームの出射を停止できる。
【0071】
(実施形態2)
本発明の他の実施形態である荷電粒子ビーム出射装置を、図11及び図12を用いて以下に説明する。本実施形態の荷電粒子ビーム出射装置は、前述の実施形態1の照射制御装置64における時間Tp,T1,T2をタイマで計測する照射制御・判定部66を、内部クロック又は外部クロックを備え、時間Tp,T1,T2をそれらクロックをカウントすることにより計測する照射制御・判定部(判定装置、第3制御装置)66Aに置き替えた構成を有する。
【0072】
図11は本実施形態におけるRMW40の回転とゲート信号の関係を示す図であり、図12は照射制御・判定部66Aの判定機能を表す機能ブロック図である。これら図11及び図12において、前述の図7及び図8と同様の部分には同符号を付し、説明を省略する。
【0073】
これら図11及び図12において、本実施形態では、ゲート位相やゲート時間判定のために内部クロックまたは角度クロックを用いる。いずれも判定をする際に時間単位を与えるものであるが、内部クロックは照射制御装置64A自身が有するクロック発生装置(例えば水晶発振器等)から発生するクロックである。一方、角度クロックは例えば照射装置16に設けられRMW40の回転に同期して発するパルス信号のことである。当然ながら、角度クロックを用いずに、内部クロックをカウントすることにより判定を行うことも可能であり、この場合は角度クロックは不要である。しかしながら、角度クロックを使用するメリットは、万一、RMW40の回転数が変化した場合であっても、RMW40の回転と同期したクロックでゲート信号を判定できるため、RMW40の回転数変化に影響されずに正しい判定ができるということにある。したがって、ここでは角度クロック発生装置(クロック発生装置。例えばエンコーダ等)89を設け、角度クロックを用いる場合を考える。
【0074】
図12に示すように、照射制御・判定部66Aには、ゲート信号生成装置37からゲート信号(図12中(1))及び基準信号(図12中(2))が入力される。ゲート信号生成装置37から入力された基準信号は前述の実施形態1と同様に位相判定回路83に入力され、これにより位相判定回路83は図示しないカウンタ(カウント装置)を起動し、角度クロック発生装置89から入力される角度クロック(図12中(5))のカウントを開始する。一方、入力されたゲート信号は、前述の実施形態1と同様に入力処理回路81によりゲート信号の立ち下がり又は立ち上がりが検出され、立ち下がりが検出された場合には、入力処理回路81からゲートパルス1信号(図12中(3))がホールド回路82を介して上記の位相判定回路83に入力され、前述の(i)式に示した判定内容と同様のTp判定が行われる。
【0075】
また、入力処理回路81からのゲートパルス1信号(図12中(3))はゲート判定3回路88にも入力される。これによりゲート判定3回路88は図示しないカウンタを起動し、角度クロック発生装置89から入力される角度クロック(図12中(5))のカウントを開始する。その後、立ち上がりが検出された場合には、入力処理回路81からゲートパルス2信号(図12中(4))がゲート判定3回路88に入力され、前述の(ii)式に示した判定内容と同様のT1判定が行われる。その後、引き続きカウンタを積算し、再度立ち下がりが検出された場合には、入力処理回路81からゲートパルス1信号(図12中(3))がゲート判定3回路88に入力され、前述の(iii)式に示したT2判定が行われる。すなわち、ゲート判定3回路88は、ゲート信号がOFFの時間T1及びゲート信号がOFF及びONの時間T2を目標値と比較して判定する(図11も参照)。
【0076】
以上の判定回路83,88のいずれかで判定が満たされなかった場合には、前述の実施形態1と同様に異常信号がOR回路86で合成され、ゲート位相・ゲートタイミング異常検出信号が生成される。本信号は否定(Not)を経由して後段のAND回路87に入る。このAND回路87により、ゲートタイミングが正常なときのみビーム出射開始信号又はビーム出射停止信号を開閉スイッチ9に与え、ビーム出射のON/OFF制御を行うことができる。一方、判定回路83,88のいずれかでゲートタイミング異常検出がなされた場合、開閉スイッチ9へのゲート信号の出力がOFFとなり(開閉スイッチ9にビーム出射停止信号が出力されて)開閉スイッチ9が開き、シンクロトロン4からのビーム出射が停止する。またインターロック装置72に対してインターロック信号が出力され、これによりインターロック装置72がシャッタ38を閉じてビームが照射装置16側に輸送されることを防止する。
【0077】
本実施形態によれば、RMW40の回転に同期した角度クロックをゲートタイミングの位相・時間判定に使用するため、万一RMW40の回転数が変化した場合であっても補正等が不要で正しく判定が行える。さらに、本実施形態では、ゲート判定3回路88においてクロックを連続的に積算することにより1羽根分のゲート時間判定を1個のカウンタによりカウントし、ゲートパルス位置を比較するため、判定に必要なカウンタの個数を少なくすることができる。その結果、通常の個数(実施形態1におけるタイマと同等の個数)のカウンタを設けた場合には、本実施形態のように2個のゲートパルスを扱う場合より多数のゲートパルスを扱うことが可能となるため、より緻密な判定を行うことが可能となる。
【0078】
(実施形態3)
本発明のさらに他の実施形態である荷電粒子ビーム出射装置を、図13乃至図15を用いて以下に説明する。本実施形態の荷電粒子ビーム出射装置は、前述の実施形態1及び2の照射制御装置64,64Aにおける時間Tp,T1,T2をタイマ又はカウンタで計測し目標値と比較することにより判定を行う照射制御・判定部66,66Aを、アドレスを更新可能なメモリデータを用いて比較判定を行う照射制御・判定部(判定装置、第3制御装置)66Bに置き替え、ゲート信号生成装置をさらにもう1つ付加した構成を有する。
【0079】
図13は本実施形態の荷電粒子ビーム出射装置の照射装置の構造を表す縦断面図である。この図13において、前述の図2と同様の部分には同符号を付し説明を省略する。
【0080】
この図13に示すように、本実施形態の荷電粒子ビーム出射装置は、ゲート信号生成装置37に加えてもう1つのゲート信号生成装置(第2制御装置)96を備えている。このゲート信号生成装置96は、ゲート信号生成装置37と同様に角度計51から入力されたRMW40の回転角度に応じて基準信号を生成し出力すると共に、角度計51の図示しないエンコーダが出力するエンコーダ出力パルスを角度クロックとして照射制御・判定部66Bに出力する。
【0081】
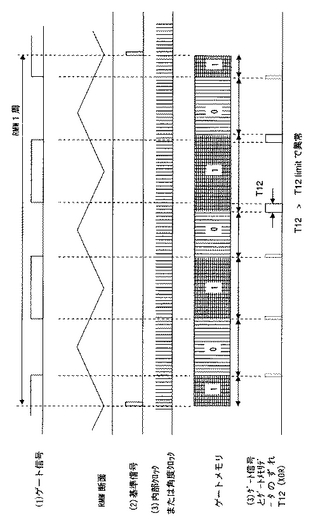
図14は本実施形態におけるRMW40の回転とゲート信号の関係を示す図であり、図15は照射制御・判定部66Bの判定機能を表す機能ブロック図である。これら図14及び図15において、前述の図7及び図8又は図11及び図12と同様の部分には同符号を付し、説明を省略する。
【0082】
図14に示すように、本実施形態では、上記したようにゲート信号の判定をタイマやカウンタで行うのではなく、照射制御・判定部66Bが有するゲートメモリと呼ぶメモリデータを用いてゲート信号の比較を行う。ゲートメモリのアドレス更新は、内部クロック又は角度クロックに同期して行えば足りる。ここでは、上記したゲート信号生成装置96から入力される角度クロックを用いる。ゲートメモリにはゲート信号のON/OFFに対応したデータが書き込まれる。例えば、本実施形態ではゲート信号がONであるべき期間は「1」、OFFであるべき期間は「0」が書き込まれる。アドレスはRMW40が1周するごとに発生する基準信号によりリセットされる。
【0083】
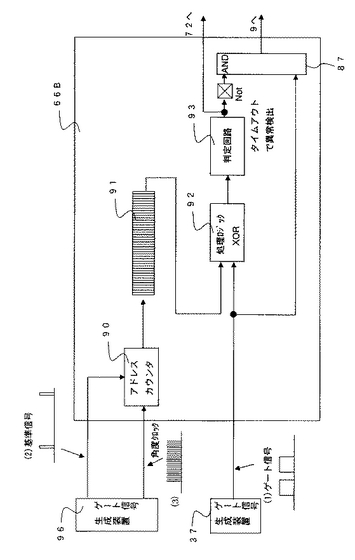
図15において、アドレスカウンタ90はゲート信号生成装置96から入力される角度クロック(図15中(3))をカウントし、ゲートメモリ(記憶装置)91のアドレスを指定する。また、アドレスカウンタ90は、基準信号(図15中(2))によりリセットされるので、RMW40が1周するごとに動作を繰り返す。ゲートメモリ91のデータは処理ロジック92に入力される。一方、ゲート信号発生装置37から出力されるゲート信号(図15中(1))も処理ロジック92に入力される。この処理ロジック92では、ゲート信号発生装置37からのゲート信号とゲートメモリ91の読出データとの排他的論理和(XOR)が取られる。XOR処理の結果であるT12(図14参照)は両者のズレに相当する。判定回路93は本信号の大きさを判定するもので、ズレの大きさが制限値(T12 limit)を超えた場合(T12 > T12 limit)、異常と判定されインターロック信号がインターロック装置72に対して出力される。この場合、開閉スイッチ9にはビーム出射停止信号が出力されるのでシンクロトロン4からのビーム出射が停止する。さらに、インターロック装置72がシャッタ38を閉じてビームが照射装置16側に輸送されることを防止する。
【0084】
本実施形態ではゲート信号発生装置96のゲート信号を使うことなく、本来の(ゲート信号発生装置37の)ゲート信号の健全性を判定することができるため、例えばレゾルバや磁気エンコーダから構成される一般に複雑なゲート信号発生装置の数を増やすことなく、装置の安全性を高めることができる。
【0085】
(実施形態4)
本発明のさらに他の実施形態である荷電粒子ビーム出射装置を、図16を用いて以下に説明する。本実施形態の荷電粒子ビーム出射装置は、上述した実施形態3と同様にゲート信号生成装置をさらにもう1つ付加すると共に、前述の実施形態1の照射制御装置64における照射制御・判定部66を、2つのゲート信号生成装置からのゲート信号をそのまま比較することにより判定を行う照射制御・判定部(判定装置、第3制御装置)66Cに置き替えた構成を有する。
【0086】
図16は本実施形態における照射制御・判定部66Cの判定機能を表す機能ブロック図である。この図16において前述の図15等と同様の部分には同符号を付し説明を省略する。
【0087】
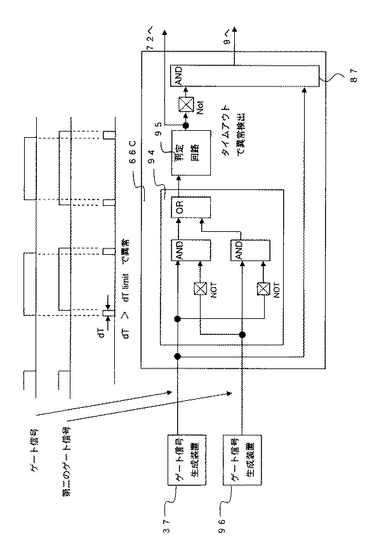
この図16に示すように、本実施形態ではゲート信号発生装置37から出力されるゲート信号とゲート信号発生装置96から出力されるゲート信号(第2制御信号)とをそのまま処理ロジック94に入力し、排他的論理和をとる。これにより2つのゲート信号のズレdTが検出される。そして、判定回路95によりズレdTが判定許容値dT limitを超過する(dT > dT limit)かどうかを判定する。ズレdTが判定許容値dT limitを超過し異常と判定された場合、インターロック信号がインターロック装置72に対して出力される。この場合、開閉スイッチ9にはビーム出射停止信号が出力されるのでシンクロトロン4からのビーム出射が停止する。さらに、インターロック装置72がシャッタ38を閉じてビームが照射装置16側に輸送されることを防止する。
【0088】
本実施形態によれば、2つのゲート信号の各々についてゲートタイミングを計測し判定を行う必要がなく、両者のズレのみによってRMW40の羽根部ごとに判定することができるため、判定手法を簡潔にすることができる。
【0089】
なお、以上では、角度計51とゲート信号生成装置37,96とによるゲート信号の生成手法として、角度計51のRMW40と同期して回転するエンコーダが出力するエンコーダ出力パルスをカウントし、出力パルスカウント値が予め記憶されたゲートON及びOFFするタイミングに相当するカウント目標値に一致したときにゲート信号をON又はOFFするようにしたが、これに限らない。すなわち、例えばエンコーダの代わりにレゾルバを適用する方式でもよい。レゾルバはステータコイルと回転コイルからなり、基準正弦波に対して、回転により位相のずれた正弦波出力を得るものである。このレゾルバを角度計51に内蔵し(又はRMW40近傍に設け)ておき、この出力を用いてゲート信号を発生させるようにしてもよい。また、RMW40又は回転軸48,49等の外周を磁気的、機械的または光学的に周期的な変化を与えるように加工し、適宜の検出器により回転パルスの形で回転情報を得るようにして、この回転パルスをカウントすることによりゲート信号を発生させるようにしてもよい。
【図面の簡単な説明】
【0090】
【図1】本発明の第1実施形態の荷電粒子ビーム出射装置の全体構成図である。
【図2】図1に示す照射装置の詳細構成を表す縦断面図である。
【図3】図1に示すRMWの斜視図である。
【図4】図3に示したRMWの平面図であり、イオンビームの出射のケースa〜cを例として示したものである。
【図5】図4に示すケースa〜cにおけるそれぞれのビームON及びビームOFFを時系列で示した図である。
【図6】図4に示すケースa〜cのそれぞれに対する深さ方向の線量分布及びSOBP幅を示す図である。
【図7】図3に示したRMWの回転とゲート信号の関係を示す図である。
【図8】図1に示した照射制御・判定部の判定機能を表す機能ブロック図である。
【図9】図2に示す照射制御装置のメモリに記憶された治療計画情報の一例を示す説明図である。
【図10】図1に示す照射制御・判定部で実行される制御ステップに係るフローチャートである。
【図11】本発明の第2実施形態におけるRMWの回転とゲート信号の関係を示す図である。
【図12】本発明の第2実施形態における照射制御・判定部の判定機能を表す機能ブロック図である。
【図13】本発明の第3実施形態における照射装置の詳細構成を表す縦断面図である。
【図14】本発明の第3実施形態におけるRMWの回転とゲート信号及びゲートメモリの関係を示す図である。
【図15】図13に示す照射制御・判定部の判定機能を表す機能ブロック図である。
【図16】本発明の第4実施形態における照射制御・判定部の判定機能を表す機能ブロック図である。
【符号の説明】
【0091】
1 荷電粒子ビーム発生装置
4 シンクロトロン
5 高周波印加装置
16 照射装置
24 荷電粒子ビーム出射装置
37 ゲート信号生成装置(第1制御装置)
40 RMW(回転体)
66 照射制御・判定部(判定装置、第3制御装置)
66A 照射制御・判定部(判定装置、第3制御装置)
66B 照射制御・判定部(判定装置、第3制御装置)
66C 照射制御・判定部(判定装置、第3制御装置)
89 角度クロック発生装置(クロック発生装置)
91 ゲートメモリ(記憶装置)
96 ゲート信号生成装置(第2制御装置)
【技術分野】
【0001】
本発明は、陽子及び炭素イオン等の荷電粒子ビームを患部に照射して治療する荷電粒子ビーム出射装置及び荷電粒子ビーム出射方法に関する。
【背景技術】
【0002】
癌などの患者の患部に陽子及び炭素イオン等の荷電粒子ビーム(イオンビーム)を照射する治療方法が知られている。この治療に用いる粒子線出射装置(荷電粒子ビーム出射装置)は、荷電粒子ビーム発生装置、ビーム輸送系、及び照射装置を備えている。荷電粒子ビーム発生装置で加速されたイオンビームは、第1ビーム輸送系及び回転ガントリーに設けられた第2ビーム輸送系を経て回転ガントリーに設置された照射装置に達する。イオンビームは照射装置より出射されて患者の患部に照射される。荷電粒子ビーム発生装置としては、例えば、荷電粒子ビームを周回軌道に沿って周回させる手段、共鳴の安定限界の外側で荷電粒子ビームのベータトロン振動を共鳴状態にする手段、及び荷電粒子ビームを周回軌道から取り出す出射用デフレクタを備えたシンクロトロン(円形加速器)が知られている(例えば、特許文献1参照。)。
【0003】
イオンビームを用いた治療、例えば陽子ビームの患部への照射では、陽子ビームのエネルギーの大部分が、陽子が停止するときに放出される、すなわちブラッグピークが形成されるという特性を利用し、陽子ビームの入射エネルギーの選択により陽子を患部近傍で停止させてエネルギー(吸収線量)の大部分を患部の細胞にのみ与えるようにする。
【0004】
通常、患部は、患者の体表面からの深さ方向(イオンビームの進行方向でもあり、以下、単に深さ方向という)にある程度の厚みをもっている。その深さ方向における患部の厚み全域にわたってイオンビームを効果的に照射するためには、深さ方向においてある程度広いフラットな吸収線量範囲(拡大ブラッグピーク幅(spread-out Bragg peak)。以下、SOBP幅という。)を形成するように、イオンビームのエネルギーを調節しなければならない。
【0005】
このような観点から、従来、周方向に段階的に厚みが変化している複数の羽根部を回転軸の周囲に配置したレンジモジュレーション回転体(レンジモジュレーションホイール。以下、RMWという。)が既に提唱されている(例えば、非特許文献1の2077頁、図30参照。)。このRMWは、複数の羽根部が回転軸に取り付けられ、隣り合う羽根部の相互間に貫通する開口を有している。例えば、開口をイオンビームの経路(ビーム経路という)に位置させてRMWを回転させる。開口及び羽根部が交互にビーム経路を横切る。イオンビームが開口を通過したときはビームエネルギーが減衰しないため、ブラッグピークが体内の最も深い位置に生じる。イオンビームが羽根部を通過する際には、羽根部の厚みが厚い部分を通過するほど、このイオンビームのエネルギーの減衰度合いが大きくなり、患部の体表面に近い部分にブラックピークが形成される。RMWの回転によって、このようなブラッグピークが形成される深さ方向の位置が周期的に変動する結果、時間積分で見ると、患部の深さ方向において比較的広くフラットなブラッグピーク幅を得ることができる。また、SOBP幅の形成は、リッジフィルタを用いても可能であることが知られている(非特許文献1の2078頁、図31)。
【0006】
【特許文献1】USP5,363,008号
【非特許文献1】レビュー オブ サイエンティフィック インスツルメンツ64巻8号(1993年8月)のページ2074〜2084、図30〜図32(REVIEW OF SCIENTIFIC INSTRUMENTS VOLUME 64 NUMBER 8 (AUGUST 1993) P2074-2084 FIG.30-32)
【発明の開示】
【発明が解決しようとする課題】
【0007】
本願の3名の発明者のうちの1名が関与してなされた発明、すなわち、RMWが回転しているときに、シンクロトロンからのイオンビームの出射をON/OFF制御する荷電粒子ビーム出射装置の発明が出願されている。その発明では、RMWを回転させつつ、例えば比較的長い時間、すなわちRMWの広い回転角度の範囲にわたってイオンビームを通過させるようにすればイオンビームの減衰度合いが大きく変動することからSOBP幅は広くなり、比較的短い時間すなわちRMWの狭い回転角度の範囲にイオンビームを通過させるようにすればイオンビームの減衰度合いがあまり変動しないためSOBP幅は狭くなる。このように、RMWの回転時にイオンビームの出射をON/OFF制御することで、1つのRMWで多様なSOBP幅を得られるので、RMWの交換頻度を低減でき、多数の患者に対し、円滑に治療を行うことができる。
【0008】
しかしながら、本願発明者等によるその発明のその後の検討によれば、上記発明には以下のような更なる改善の余地があることが分かった。
すなわち、その発明によれば、各患者ごとにビーム出射のON/OFFを制御することによりその患者の患部に応じたSOBP幅を得ることができるものの、ビームのON/OFFが所望のタイミングで行われているかどうかをビーム照射中にリアルタイムに確認する手法が確立されてはいなかった。このため、治療の安全性の向上の観点において更なる改善の余地があった。
【0009】
本発明の目的は、治療照射中にイオンビームの出射をON/OFF制御する場合において、安全性を向上することができる荷電粒子ビーム出射装置及び荷電粒子ビーム出射方法を提供することにある。
【課題を解決するための手段】
【0010】
上記した目的を達成する本発明の特徴は、前記荷電粒子ビーム発生装置から出射された前記荷電粒子ビームの進行方向における厚みが変化し、通過する前記荷電粒子ビームのエネルギーを変えて前記照射対象内に拡大ブラッグピーク幅を形成させる回転体の回転角度に基づいて前記荷電粒子ビーム発生装置からの前記荷電粒子ビームの出射及び出射停止を制御する第1制御装置と、前記第1制御装置により前記荷電粒子ビームの出射及び出射停止の制御が所望のタイミングで行われているかどうかを判定する判定装置とを備えたことにある。
【0011】
本発明は、治療照射中に行われる荷電粒子ビームの出射及び出射停止の制御が所望のタイミングで行われているかどうかを判定するため、治療照射の安全性を向上することができる。
【0012】
好ましくは、荷電粒子ビームの出射及び出射停止の制御が所望のタイミングで行われていないと判定したときに、荷電粒子ビームの出射を停止するように制御する。これにより、照射対象に対する荷電粒子ビームを用いた治療の安全性を確実に向上することができる。
【発明の効果】
【0013】
本発明によれば、照射対象に対する荷電粒子ビームを用いた治療の安全性を向上することができる。
【発明を実施するための最良の形態】
【0014】
以下、本発明の実施の形態を図面を用いて詳細に説明する。
(実施形態1)
本発明の好適な一実施形態である荷電粒子ビーム出射装置を、図1を用いて説明する。本実施形態の荷電粒子ビーム出射装置24は、荷電粒子ビーム発生装置1、荷電粒子ビーム発生装置1の下流側に接続されたビーム輸送系2、及び照射野形成装置である照射装置16を備えている。本実施形態の荷電粒子ビーム出射装置24は、具体的には陽子線出射装置である。
【0015】
荷電粒子ビーム発生装置1は、イオン源(図示せず)、前段加速器(例えば線形加速器)3及び主加速器であるシンクロトロン4を有する。シンクロトロン4は、一対の電極によって構成された高周波印加装置5及び高周波加速空胴6をイオンビームの周回軌道上に設置している。第1高周波電源8が開閉スイッチ9、10を介して高周波印加装置5の電極に接続される。高周波加速空胴6に高周波電力を印加する第2高周波電源(図示せず)が、別途設けられる。イオン源で発生したイオン(例えば、陽イオン(または炭素イオン))は前段加速器3で加速される。前段加速器3から出射されたイオンビーム(荷電粒子ビーム)はシンクロトロン4に入射される。荷電粒子ビームであるイオンビームは、第2高周波電源からの高周波電力の印加によって高周波加速空胴6内に発生する電磁場に基づいてエネルギーを与えられて加速される。シンクロトロン4内を周回するイオンビームは、設定されたエネルギー(例えば100〜200MeV)まで加速された後、開閉スイッチ9を閉じることによってシンクロトロン4から出射される。すなわち、第1高周波電源8からの高周波が、開閉スイッチ9を閉じることによって、閉じられている開閉スイッチ10、及び開閉スイッチ9を通して高周波印加装置5より周回しているイオンビームに印加される。このため、安定限界内で周回しているイオンビームは、安定限界外に移行し、出射用デフレクタ11を通って出射される。イオンビームの出射の際には、シンクロトロン4に設けられた四極電磁石12及び偏向電磁石13に導かれる電流が電流設定値に保持され、安定限界もほぼ一定に保持されている。開閉スイッチ9(または開閉スイッチ10)を開いて高周波印加装置5への高周波電力の印加を停止することによって、シンクロトロン4からのイオンビームの出射が停止される。
【0016】
シンクロトロン4から出射されたイオンビームは、ビーム輸送系2により下流側のビーム経路17に輸送される。ビーム輸送系2は、四極電磁石14及び偏向電磁石15を備え、照射装置16に連絡されるビーム経路17に連絡される。照射装置16及びビーム経路17は、治療室(図示せず)内に設置された回転ガントリー(図示せず)に取り付けられている。四極電磁石18、偏向電磁石19及び偏向電磁石20がこの順にビーム経路17に設けられる。ビーム経路17内のイオンビームは、照射装置16へと輸送される。患者22が、回転ガントリー内に形成された治療ケージ(図示せず)内で位置決めされた治療用ベッド21に横たわっている。照射装置16から出射されたイオンビームは、その患者22の癌の患部K(後述の図2参照)に照射される。四極電磁石18等の電磁石を備えたビーム経路17はビーム輸送系であるとも言える。また、ビーム輸送系2の上流側にはビームシャッタ38が設けられている。このビームシャッタ38は通常開いているが、異常時には後述のインターロック装置72により閉じられ、シンクロトロン4からのイオンビームの出射を遮断する(詳細は後述)。
【0017】
照射装置16の構造を、図2を用いて説明する。この図2に示すように、照射装置16は、回転ガントリーに取り付けられ、ビーム経路17に接続されるケーシング25を有する。照射装置16は、ケーシング25内に、イオンビーム進行方向の上流側より順次、ビームプロファイルモニタ26,線量モニタ27,RMW装置28,第2散乱体装置29,飛程調整装置(例えば、レンジシフタ)30,線量モニタ31,平坦度モニタ32,ブロックコリメータ33,患者コリメータ34、及びボーラス35を、ケーシング25内のビーム経路(ビーム軸)m上に配置している。
【0018】
ビームプロファイルモニタ26は、ビーム輸送系2から照射装置16に入射されたイオンビームがビーム軸m上に位置しているかどうかを確認するモニタである。線量モニタ27は照射装置16に入射されたイオンビームの線量を検出するモニタである。これらビームプロファイルモニタ26及び線量モニタ27は、ケーシング25に取り付けられた支持テーブル39上に設置される。
【0019】
RMW装置28は、RMW(回転体)40、RMW40を回転させる回転装置(例えばモータ)42、及びRMW40の回転角度を検出する角度計51を有する。RMW40、回転装置42及び角度計51は、ケーシング25に設置された支持部材50によって保持される。図3に示すように、RMW40は、回転軸43、回転軸43と同心円状に配置された円筒部材44、及び回転軸43に取り付けられてRMW40の半径方向に伸び、他端が円筒部材44に取り付けられた複数の羽根部45(本実施例では羽根部45A,45B,45Cの3枚)を有している。これらの羽根部45の周方向における幅は回転軸43側の端部よりも円筒部材44側の端部で広くなっている。RMW40の周方向における羽根部45の相互間には、それぞれ開口46が形成されている。これら開口46の周方向における幅も円筒部材44の内面に近づくほど広くなるように形成されている。
【0020】
各羽根部45は、RMW40の周方向において階段状に配置された複数の平面領域(段部)47を有しており、回転軸43の軸方向(ビーム軸mの方向)におけるRMW40の底面から各平面領域47までの各厚みが異なっている。すなわち、RMW40の底面から各平面領域47までのレベルが異なる。ここでは、1つの平面領域47に対するその厚みを、平面領域部分の厚みという。すなわち、羽根部45は、周方向において羽根部45の両側に位置する開口46からビーム軸mの方向における最も厚みの厚い頂部36に位置する平面領域47に向かって各平面領域部分の厚みが階段状に増加している。各平面領域47は回転軸43から円筒部材44に向かって延びており、その周方向における幅も円筒部材44に近づくほど広くなっている。
【0021】
本来、RMWの羽根の厚みは連続的に変化するのが理想的な形状である。しかしながら、実際のRMWは、上記のように羽根部の厚みを階段状に変化するように、一般的に製作される。この理由は、SOBP生成特性と工作容易性との兼ね合いという観点によるものである。すなわち、羽根部の厚みを階段状に変化させることにより、理想的な形状に比較して若干のSOBP生成特性の低下と引き換えに、工作容易性(工作精度の確認容易性)を飛躍的に向上させることができる。
【0022】
図2に戻り、ケーシング25に設置される支持部材50は、ビーム軸mの方向に対向する支持部50A,50Bを有し、更に支持部50Bの下流側に支持部50Cを有する。これら支持部50A,50Bはそれぞれ回転軸48,49を回転可能に支持している。RMW40は支持部50A,50Bの間に挿入され、RMW40の回転軸43が回転軸48,49に挟まれるように支持される。すなわち、回転軸43は回転軸48,49に着脱可能に取り付けられ、RMW40が交換可能となる。回転軸48,49のそれぞれの端部が回転軸43に設けられた貫通孔内に挿入されている。なお、支持部50A,50Bはケーシング25内のビーム経路をさえぎらないように配置される。回転軸43,48,49もそのビーム経路からずれた位置に配置される。
【0023】
支持部50Cに設置された回転装置42が回転軸49に連結されている。RMW40の回転角度(回転位相)を検出する角度計51が、回転軸48に連結されて支持部50Aに取り付けられている。角度計51で検出されたRMW40の回転角度の測定値は、後述するゲート信号生成装置37に出力される。
【0024】
なお、本実施形態は、図2及び図3に図示していないが、RMW装置28と第2散乱体装置29との間で、ビーム軸m上に第1散乱体が設置されている。この第1散乱体も、ケーシング25に設置される。第1散乱体は、RMW40を通過したイオンビームをビーム軸mと直交する方向に広げる機能を有する。
【0025】
第2散乱体装置29は、複数の第2散乱体55,回転テーブル56及びモータ57を有している。モータ57は、ケーシング25に取り付けられる支持部材58に設置されている。イオンビームを散乱する度合いが異なる複数の第2散乱体55は回転テーブル56上に周方向に並んで設置される。回転テーブル56がモータ57により回転されることによって、所定の第2散乱体55がビーム軸m上に配置される。モータ57の駆動は駆動制御部68によって制御される。
【0026】
飛程調整装置30は、厚みの異なる複数の吸収体60(本実施の形態では4つ)、及び各吸収体60ごとに設けられた吸収体操作装置61を有する。この吸収体操作装置61としては、例えば圧縮空気により駆動するエアシリンダ等が用いられる。各吸収体操作装置61は吸収体駆動装置62によって駆動され、この吸収体駆動装置62は駆動制御部68によって制御される。
【0027】
線量モニタ31は、照射装置16に入射され、RMW装置28,第1散乱体、第2散乱体装置29及び飛程調整装置30を通過したイオンビームの線量を検出する。また、平坦度モニタ32は第1散乱体及び第2散乱体55によって散乱されたイオンビームのビーム軸mと垂直な方向における平坦度(線量一様度)を確認するモニタである。線量モニタ31及び平坦度モニタ32は支持テーブル63上に設けられている。
【0028】
ブロックコリメータ33は、イオンビームをビーム軸mと垂直な平面方向に整形してイオンビームの照射野を粗くコリメートする。ブロックコリメータ33の開口径は駆動制御部68によって可変に制御される。患者コリメータ34はイオンビームを患者22の患部Kの形状に合わせてさらに細かくコリメートするためのものである。ボーラス35は、治療患者22の患部K(例えば癌や腫瘍の発生部位)の最大深さに合わせてイオンビームの到達深度を調整するものであり、ビーム軸mに垂直な平面上の各位置における飛程を、照射目標である患部Kの深さ形状に合わせて調整するものである。
【0029】
荷電粒子ビーム出射装置24は、ゲート信号生成装置(第1制御装置)37と、照射制御装置64とを備える。照射制御装置64は、照射制御・判定部(判定装置、第3制御装置)66、駆動制御部68及びメモリ69を有する。
【0030】
ゲート信号生成装置37は、角度計51から入力されたRMW40の回転角度に応じて、ゲート信号(第1制御信号)を生成し出力する。具体的には、角度計51が有しRMW40と同期して回転する図示しないエンコーダが出力する出力パルスを入力してカウントし、その出力パルスのカウント値が、ゲート信号生成装置37内の図示しないメモリ等に予め記憶されたゲート信号の出力がON又はOFFするタイミングに相当するエンコーダ出力パルスのカウント目標値に一致すると、ゲート信号の出力をON又はOFFする。また、ゲート信号生成装置37は、RMW40が1回転するごとに上記ゲート信号の出力タイミングの基準となる基準信号(パルス信号)を出力する。すなわち、上記ゲート信号の場合と同様に、ゲート信号生成装置37には予め基準信号の出力タイミングに相当するエンコーダ出力パルスのカウント目標値が記憶されており、出力パルスのカウント値が当該カウント目標値に一致すると基準信号を出力する。なお、この図2ではゲート信号生成装置37を照射制御装置64とは別個に設けたように図示しているが、例えば照射制御装置64の一機能としてもよい。
【0031】
照射制御・判定部66は、上記ゲート信号生成装置37から出力されるゲート信号を入力し、そのゲート信号出力のON又はOFFが所望のタイミングで行われているかどうかの判定を行う。正常であると判定した場合には、ゲート信号に基づいてSOBP幅を形成するための荷電粒子ビーム発生装置1からのイオンビームの出射のON・OFF制御を行う。異常であると判定した場合には、荷電粒子ビーム発生装置1からのイオンビームの出射を停止すると共に、インターロック装置72を介してビームシャッタ38を閉じるように制御する。駆動制御部68は、第2散乱体装置29のモータ57、飛程調整装置30の吸収体駆動装置62、及びブロックコリメータ33のそれぞれの駆動を制御する。メモリ69は、後述するゲート信号の出力ON/OFFのタイミング判定を行うための各種目標値や、中央制御装置70から出力された照射条件情報を記憶する。更に、荷電粒子ビーム出射装置24はインターロック装置72(図1参照)を備える。
【0032】
以上の構成を有する荷電粒子ビーム出射装置24は、RMW40の回転角度に応じて荷電粒子ビーム発生装置1からのイオンビームの出射ON/OFFを制御することにより、複数のSOBP幅を生成することができる。以下、この原理を、図4、図5及び図6を用いて説明する。
【0033】
イオンビームがRMW40の開口46を通過したときは、ビームエネルギーは減衰しないためブラッグピークが体表面から深い第1の位置に形成される。羽根部45のうち最も厚みが厚くなる頂部36に位置する平面領域47をイオンビームが通過したときは、ビームエネルギーが最も大きく減衰されてブラックピークが体表面近くの浅い第2の位置に形成される。イオンビームが開口46と頂部36の間に位置する平面領域47を通過したときは、その平面領域47が位置する部分の厚みに応じてビームエネルギーが減衰するため、ブラッグピークは第1位置と第2位置の間に存在する第3の位置に形成される。したがって、図4及び図5におけるケースaのように、RMW40の周方向において、360°の全回転角度領域において常にビームONである場合には、RMW40の回転によりブラッグピークは第1位置と第2位置との間で周期的に変動する。この結果、ケースaは、時間積分で見ると、図6に示す深さ方向の線量分布aのように体表面近くから深い位置に至る比較的広いSOBP幅を得ることができる。「ビームON」は、イオンビームがシンクロトロン4から出射されてRMW40を通過し照射装置16から出射される状態を意味する。これに対し、「ビームOFF」は、イオンビームがシンクロトロン4から出射されず照射装置16から出射されない状態を意味する。
【0034】
図4及び図5におけるケースbは、RMW40の周方向において、各羽根部45の比較的厚い領域(頂部36付近)ではビームOFFとし、これ以外の回転角度領域ではビームONとする。ケースbは、体表面近くの浅い部分で生じるブラッグピークがなくなるため、図6に示す深さ方向の線量分布bのように線量分布aよりもフラット部分が狭くなったSOBP幅が形成される。
【0035】
図4及び図5におけるケースcは、RMW40の周方向において、開口46及び開口46付近の各羽根部45の厚みが比較的薄い領域にてビームONとし、これら以外の回転角度領域ではビームOFFとする。ケースcは、全体にビームエネルギーの減衰量が少ないため、体表面から深い位置にブラッグピークが形成される。このため、ケースcは、図6に示す深さ方向の線量分布cのように線量分布bよりもフラット部分が狭くなったSOBP幅が形成される。
【0036】
荷電粒子ビーム出射装置24は、以上のようにRMW40の回転角度に応じてイオンビームの出射ON/OFF制御を行うことにより、1つのRMWで複数の異なるSOBP幅を形成することができる。
【0037】
RMW40の回転時にイオンビームの出射ON/OFF制御を行うことにより種々のSOBP幅を形成できることは、後述するように、非常にメリットがある。しかしながら、イオンビームの出射のON/OFF制御が実際に所望のタイミングで行われているかどうかを確認できることは、イオンビームを用いた治療の安全性を高めるためにも、荷電粒子ビーム出射装置に要求される重要な要件の1つである。発明者らは、この課題を解決するために種々の検討を行った。この発明者らの検討結果を、以下に説明する。
【0038】
図7はRMW40の回転とゲート信号の関係を示す図である。なお、図5までの説明においてRMWの羽根部の厚みは階段状に変化しているが、これは先に述べたように容易に工作精度を確保することからの制約によるものである。図7以降の説明においては、RMWの羽根部は、厚みが理想的に直線状に変化する山形の断面形状になっているとして説明する。羽根部の断面が山形であることと前述のように厚みが階段状に変化することは、説明上、本質的な差異は生じない。RMW40は先の図3において説明したように3つの羽根部45A,45B,45Cの3枚を有しており、その断面は図7に示すように周方向に略3つの山形を有する形状となる。図の例では3つの山(羽根部で最も厚みが厚い部分)と谷(厚みがゼロの部分(図4で開口46の部分))がある。ゲート信号は先の図4において説明したケースbのように谷を中心に一定の範囲でONとなるように制御されるものとする。ゲート信号生成装置37から入力されるゲート信号がONである場合、後述する判定に異常がなければ照射制御・判定部66は開閉スイッチ9に出射開始信号を出力し、開閉スイッチ9を閉じて第1高周波電源8からの高周波を高周波印加装置5より周回しているイオンビームに印加させる。また、ゲート信号生成装置37から入力されるゲート信号がOFFである場合、照射制御・判定部66は開閉スイッチ9に出射停止信号を出力し、開閉スイッチ9を開き第1高周波電源8からの高周波が高周波印加装置5よりイオンビームに印加されるのを停止する。
【0039】
次に、照射制御・判定部66で行われるゲート信号のON/OFFタイミング(以下、単にゲートタイミングという。)の判定機能について図8を用いて説明する。図8は照射制御・判定部66の判定機能を表す機能ブロック図である。この図8に示すように、照射制御・判定部66には、ゲート信号生成装置37からゲート信号(図8中(1))及び基準信号(図8中(2))が入力される。ゲート信号生成装置37から入力された基準信号は位相判定回路83に入力され、これにより位相判定回路83は図示しないタイマ(タイマー装置)を起動する。一方、入力されたゲート信号は、入力処理回路81によりゲート信号の立ち下がり又は立ち上がりが検出される。立ち下がりが検出された場合(ここでは否定(Not)を経由して立ち上がりが検出された場合)には、入力処理回路81からゲートパルス1信号(図8中(3))がホールド回路82を介して上記の位相判定回路83に入力され、時間Tpの判定が行われる。時間Tpとは基準信号からゲート信号の最初の立ち下がりまでの時間である(図7参照)。すなわち、位相判定回路83では、基準信号からゲート信号の最初の立ち下がりまでの時間Tpを目標値と比較することにより、ゲート信号全体とRMW40の回転との位相差の判定が行われる。具体的には次式(i)を満たせば正常と判定される。
【0040】
Tp判定:Tp = Tp limit ± Etp ・・・(i)
ここで、Tp limitはTpの目標値、EtpはTpの許容値であり、例えば照射制御装置64のメモリ69に予め記憶された値である。なお、ホールド回路82は基準信号でリセットされるまで状態を保つため、Tp判定はRMW40の1周に1回だけ、基準信号直後のゲートパルス1に対してのみ行われる。
【0041】
また、入力処理回路81からのゲートパルス1信号(図8中(3))はゲート判定1回路84にも入力される。その後、立ち上がりが検出された場合には、入力処理回路81からゲートパルス2信号(図8中(4))がゲート判定1回路84に入力され、時間T1の判定が行われる。時間T1とはゲートパルス1信号からゲートパルス2信号までの時間(すなわちゲート信号の出力がOFFの時間)である(図7参照)。すなわち、ゲート判定1回路84では、ゲートパルス1信号からゲートパルス2信号までの時間T1を目標値と比較することにより、ゲート信号がOFFとなるべき時間T1を判定する。具体的には次式(ii)を満たせば正常と判定される。
【0042】
T1判定:T1 = T1 limit ± Et1 ・・・(ii)
ここで、T1 limitはT1の目標値、Et1はT1の許容値であり、例えば照射制御装置64のメモリ69に予め記憶された値である。RMW40の羽根部45の構造は回転対称であるので、RMW40が1周する間、羽根部45ごとに繰り返して判定を行う。
【0043】
また、入力処理回路81からのゲートパルス2信号(図8中(4))はゲート判定2回路85にも入力される。その後、立ち下がりが検出された場合には、入力処理回路81からゲートパルス1信号(図8中(3))がゲート判定2回路85に入力され、時間T2の判定が行われる。時間T2とはゲートパルス2信号からゲートパルス1信号までの時間(すなわちゲート信号がONの時間)である(図7参照)。すなわち、ゲート判定2回路85では、ゲートパルス2信号からゲートパルス1信号までの時間T2を目標値と比較することにより、ゲート信号がONとなるべき時間T2を判定する。具体的には次式(iii)を満たせば正常と判定される。
【0044】
T2判定:T2 = T2 limit ± Et2 ・・・(iii)
ここで、T2 limitはT2の目標値、Et2はT2の許容値であり、例えば照射制御装置64のメモリ69に予め記憶された値である。RMW40の羽根部45の構造は回転対称であるので、RMW40が1周する間、羽根部45ごとに繰り返して判定を行う。
【0045】
以上の各判定回路83,84,85のいずれかで判定が満たされなかった場合には、異常信号がOR回路86で合成され、ゲート位相・ゲートタイミング異常検出信号が生成される。本信号は否定(Not)を経由して後段のAND回路87に入る。このAND回路87により、ゲートタイミングが正常であるときのみゲート信号生成装置37からのゲート信号をビーム出射開始信号又はビーム出射停止信号として開閉スイッチ9に与え、ビーム出射のON/OFF制御を行うことができる。一方、各判定回路83,84,85のいずれかでゲートタイミングに異常が検出された場合、開閉スイッチ9にゲート信号は出力されない(すなわちビーム出射停止信号が出力される)。これにより、開閉スイッチ9が開き、シンクロトロン4からのビーム出射が停止する。同時に、インターロック装置72に対してインターロック信号が出力され、これによりインターロック装置72がビームシャッタ38を閉じてビームが照射装置16側に輸送されることを防止する。
【0046】
荷電粒子ビーム出射装置24による治療開始前に、医者は、X線CT装置(図示せず)によって得られた患者22の患部K付近の断層像を用いて診断を行い、患部Kの位置及びサイズを把握すると共に、イオンビームの照射方向、最大照射深さ等の情報を治療計画装置71に入力する。治療計画装置71は、治療計画ソフトによって、入力されたイオンビームの照射方向、最大照射深さ等に基づき、SOBP幅、照射野径及び患部Kに対する目標線量等を算出する。さらに、治療計画装置71は、各種運転パラメータ(シンクロトロン4から出射されるイオンビームのエネルギー(照射装置16への入射エネルギー)、回転ガントリー角度、及びイオンビームの出射ON/OFF時におけるRMW40の各回転角度)を算出すると共に、治療に適切なRMW40を選定する。回転角度及び目標線量、さらに、図9に示された照射野径、飛程、入射エネルギー(入射Eg)、第1散乱体の厚み(SC1厚)、SOBP幅、第2散乱体55の種類(SC2種類)、飛程調整装置30におけるビーム経路に位置させる吸収体60の厚み(RS厚)及びブロックコリメータ33の開口径(BC開口径)等の上記した治療計画情報が、荷電粒子ビーム出射装置24の中央制御装置70に入力され、中央制御装置70の記憶装置(図示せず)に記憶される。以上に述べた各治療計画情報は、中央制御装置70から照射制御装置64のメモリ69に記憶される。
【0047】
ガントリー制御装置(図示せず)は、メモリ69より入力した回転ガントリー角度情報に基づいて、照射装置16のビーム経路がその角度で患者22を向くように、回転ガントリーを回転させる。患者が横たわっている治療用ベッド21を移動させて患部Kが照射装置16のビーム経路の延長線上に位置するように、治療用ベッド21の位置決めがなされる。
【0048】
照射制御装置64の駆動制御部68は、メモリ69に記憶された照射野径、飛程及び入射エネルギーの各情報を用いて、メモリ69に予め記憶されている図9に例示したような照射条件情報から、第1散乱体の厚み、SOBP幅、第2散乱体の種類、吸収体の厚み、及びブロックコリメータ開口径を選定する。駆動制御部68は、第1散乱体の厚みの情報に基づいて、ビーム軸m上に位置するようにその厚みの第1散乱体を移動させる。駆動制御部68は、選定された第2散乱体55がビーム軸m上に位置するようにモータ57を駆動して回転テーブル56を回転させる。また、駆動制御部68は、選定された吸収体60がビーム軸m上に位置するように吸収体駆動装置62を介して吸収体操作装置61を操作する。駆動制御部68は、選定されたブロックコリメータ33の開口径情報に基づき、図示しない駆動装置を制御し、ブロックコリメータ33の各ブロックを駆動し、その開口径を所定の径にする。
【0049】
各種の治療計画情報は、荷電粒子ビーム出射装置24の制御室内に設置された表示装置に表示される。治療を受ける患者22に対するRMW40、ボーラス35及び患者コリメータ34が、作業員によって、照射装置16のケーシング25内に図2に示すように設置される。
【0050】
照射制御装置64の照射制御・判定部66は、治療する患者22に対する、ケーシング25内に設置したRMW40の回転角度情報(例えば、後述のα1〜α6)、目標線量、及び前述したTp判定、T1判定、T2判定で用いる目標値Tp limit, T1 limit, T2 limit及び許容値Etp, Et1, Et2等をメモリ69から読み出す。
【0051】
荷電粒子ビーム出射装置24を用いた患部Kの治療について、以下に説明する。シンクロトロン4は、前段加速器3からのイオンビームの入射、イオンビームの加速、イオンビームの出射、及び減速を繰り返して運転される。設定エネルギーである出射エネルギーまでイオンビームが加速されると、イオンビームの加速が終了し、イオンビームがシンクロトロン4から出射可能な状態(イオンビームの出射可能な状態)になる。イオンビームの加速終了情報は、シンクロトロン4の電磁石等の状態をセンサ(図示せず)で監視している電磁石電源制御装置から中央制御装置70に伝えられる。
【0052】
荷電粒子ビーム出射装置24における前述したSOBP幅形成のためのイオンビームの出射ON/OFFに係る制御を、図1、図2、図4及び図10を用いて説明する。以下におけるイオンビームの出射ON/OFFに係る制御は、図5におけるケースbの一例に基づいて説明する。このケースbの一例では、黒丸の点52A、52B及び52Cがイオンビームの出射ON(出射開始)時点であり、白丸の点53A、53B及び53Cがイオンビームの出射OFF(出射停止)時点である。照射制御・判定部66は、ケースbの制御を行うに際して、回転角度の設定値である回転角度α1〜α6(α3〜α6は図示せず)を、メモリ69から入力する。回転角度α1は基準線41から点52Aまでの角度であり、回転角度α2は基準線41から点53Aまでの角度であり、回転角度α3は基準線41から点52Bまでの角度であり、回転角度α4は基準線41から点53Bまでの角度であり、回転角度α5は基準線41から点52Cまでの角度であり、回転角度α6は基準線41から点53Cまでの角度である。回転角度α1〜α6は、基準線41がビーム軸mに位置するときを基準にした角度を示している。図4において、黒丸の位置がイオンビームの出射を開始する位置であり、白丸の位置がイオンビームの出射を停止する位置である。
【0053】
照射制御・判定部66は、図10に示す制御フローに基づいてイオンビームの出射ON/OFFに係る制御を実行する。まず、加速器(シンクロトロン4)の加速終了信号(イオンビームが出射可能な状態になったことを示す信号)を入力する(ステップ73)。この加速終了信号は中央制御装置70から入力される。回転装置42に回転開始信号を出力する(ステップ74)。回転装置42は回転開始信号に基づいて回転される。回転装置42の回転力は回転軸49を介して回転軸43に伝えられ、RMW40が回転される。RMW40の回転数は1秒間当り100〜200回転の範囲内の回転数に設定される。回転角度の計測値が回転角度の第1設定値と一致するかが判定される(ステップ75)。角度計51で計測されたRMW40の回転角度の計測値は、ゲート信号生成装置37に入力される。この計測値が出射開始信号を出力するための回転角度の第1設定値(回転角度α1、α3及びα5のいずれか)と一致するかが判定される。回転角度の計測値が第1設定値と一致した場合は、ゲート信号生成装置37から照射制御・判定部66にゲート信号が出力され、前述したTp判定、T1判定、T2判定によりゲートタイミングが正常であると判定された場合には、照射制御・判定部66から出射開始信号が出力される(ステップ76)。この出射開始信号によって、開閉スイッチ9が閉じられる。開閉スイッチ10は閉じている。第1高周波電源8から出力された高周波が高周波印加装置5より周回しているイオンビームに印加されるため、イオンビームがシンクロトロン4から出射される。このイオンビームは、照射装置16に輸送される。
【0054】
このイオンビームは、照射装置16内でビーム軸mに沿って進行する。イオンビームは、ビームプロファイルモニタ26、線量モニタ27を通過する。そして、回転しているRMW40を通過したイオンビームは、第1散乱体によりビーム軸mに直交する方向に拡大される。その後、イオンビームは、第2散乱体55により上記直交する方向で線量分布が平坦化され、飛程調整装置30の吸収体60を通過してエネルギーを減少されて患者22の体内における飛程が調整される。吸収体60を通過したイオンビームは、線量モニタ31で線量を計測され、平坦度モニタ32でビーム軸m方向に垂直な方向における平坦度が確認される。イオンビームは、さらに、ブロックコリメータ33、患者コリメータ34及びボーラス35を通過して、患部Kに照射される。
【0055】
患部Kに照射された線量が目標線量に到達したかが判定される(ステップ77)。また、回転角度の計測値が回転角度の第2設定値と一致するかが判定される(ステップ78)。線量モニタ31によって測定された患部Kに照射される線量は、常に照射制御・判定部66に入力されている。ステップ77においては、線量モニタ31によって測定された線量計測値の累積値が目標線量になったかが判定される。この判定結果が「YES」の場合には、ステップ78の処理に優先してステップ82の処理が実行され、照射制御・判定部66から開閉スイッチ9に出射停止信号が出力される。このビーム出射停止信号によって、開閉スイッチ9が開き、高周波印加装置5への高周波の供給が停止される。このため、シンクロトロン4からのイオンビームの出射が停止される。治療用ベッド21上の患者22に対するイオンビームの照射が終了する。回転装置42に停止信号を出力する(ステップ83)。回転装置42の回転が停止し、RMW40の回転も停止する。
【0056】
ステップ77の判定が「NO」である場合には、ステップ78の処理が実行される。ステップ78において、ゲート信号生成装置37により回転角度の計測値が出射停止信号を出力するための回転角度の第2設定値(回転角度α2、α4及びα6のいずれか)と一致したと判定された場合には、ゲート信号生成装置37から照射制御・判定部66に出力されるゲート信号がOFFとなる。これにより、照射制御・判定部66から出射停止信号が出力される(ステップ79)。出射停止信号の出力により、上記したように開閉スイッチ9が開き、シンクロトロン4からのイオンビームの出射が停止される。ステップ76の出射開始信号の出力からステップ79の出射停止信号の出力までの期間は、例えば、羽根部45Aの平面領域47Aから羽根部45Bの平面領域47Bが、イオンビームが通るビーム軸mを横切る期間であって、実質的にビームONの期間である。開閉スイッチ9が閉じてシンクロトロン4からイオンビームが出射されるまでに要する時間は1/1000秒以下であり、逆に開閉スイッチ9が開いてイオンビームの出射が停止されるまでに要する時間も1/1000秒以下である。
【0057】
ステップ80で、再度、線量モニタ31からの検出信号を基に得られた患部Kに照射された線量が目標線量に到達したかが判定される。この判定結果が「NO」の場合には、ステップ81の処理が実行される。すなわち、上記したビームONの期間が終了した後、シンクロトロン4内にイオンビームが十分に存在するかを判定する。このイオンビームの存在量(イオンビームの電流密度)は、電磁石電源制御装置がシンクロトロン4に設けられたセンサ(図示せず)の計測値を基に監視している。イオンビームの電流密度の計測値は、中央制御装置70を介して照射制御・判定部66に入力されている。ステップ81の判定は、電流密度の計測値を用いて行われる。判定結果が「YES」の場合には、ステップ75〜80の処理が実行される。この繰り返し処理における、ステップ76の出射開始信号の出力からステップ79の出射停止信号の出力までの期間は、例えば、羽根部45Bの平面領域47Cから羽根部45Cの平面領域47Dがビーム軸mを横切る期間であって、実質的にビームONの期間である。次のステップ75〜80の繰り返し処理における、羽根部45Cの平面領域47Eから羽根部45Aの平面領域47Fがビーム軸mを横切る期間も、実質的にビームONの期間である。2つのビームONの期間の間には、図5に示すようにビームOFFの期間が存在する。ステップ75〜80の繰り返し処理時に、ステップ77または80で、線量計測値の累積値が目標線量になったと判定されると、ステップ83の処理が行われて患者22へのイオンビームの照射は終了する。
【0058】
ステップ81の判定が「NO」の場合には、ステップ73からの処理が実行される。すなわち、シンクロトロン4内を周回しているイオンビームの電流密度が低下してイオンビームの出射が不可能な場合には、シンクロトロン4を減速させる。電磁石電源制御装置がシンクロトロン4及びビーム輸送系2等に設けられた電磁石に供給する電流値を低下させる。それらの電磁石に供給される電流値がイオンビームの入射状態に保持される。イオンビームが前段加速器3からシンクロトロン4に入射される。このイオンビームは前述のように出射エネルギーになるまで加速される。イオンビームの加速終了後にステップ73からの処理が、照射制御部66で実行される。
【0059】
ステップ76とステップ78の間でステップ77の判定を行うため、イオンビームが回転しているRMW40を通過している間に、線量計測値の累積値が目標線量になったとき、イオンビームの出射を停止することができる。したがって、患部Kにイオンビームが過大に照射されることを防止できる。例えば、図4において、羽根部45Aと羽根部45Bとの間に位置する開口46がビーム軸mの位置に存在するときにステップ77で「YES」と判定された場合には、イオンビームの出射を停止できる。このため、その開口46がビーム軸mに位置してから回転角度の第2設定値に対する点53Aがビーム軸mに位置するまでの間におけるイオンビームの患部Kへの照射を停止できる。
【0060】
上記したケースbの一例においては、点52Aから点53Aまでの領域、点52Bから点53Bまでの領域及び点52Cから点53Cまでの領域はRMW40におけるイオンビーム通過領域である。点53Aから点52Bまでの領域、点53Bから点52Cまでの領域及び点53Cから点52Aまでの領域はRMW40におけるイオンビームの通過しない領域(イオンビーム非通過領域)である。ケースbの一例について説明したが、1つのRMW40に対して、出射開始信号を出力するための回転角度の第1設定値、及び出射停止信号を出力するための回転角度の第2設定値を変えることにより種々のSOBP幅を形成することができる。図5に示す各「ビームON」は開口46をイオンビームが通過しているが、イオンビームが開口46を通過せず頂部36を通過させるように制御することも可能である。照射制御・判定部66は、例えば、図4において、点53Cがビーム軸mに到達したときに出射開始信号を出力し、点52Aがビーム軸mに到達したときに出射停止信号を出力する。
【0061】
以上に述べた照射制御・判定部66によるイオンビームの出射ON/OFF制御により、治療計画で定めた、患者22に対する所望のSOBP幅を患部Kに形成することができる。
【0062】
イオンビームを照射装置16から出射している間、駆動制御部68は、第2散乱体装置29,飛程調整装置30、及びブロックコリメータ33の機器状態情報をそれぞれリアルタイムに(又は例えば一定周期おきに)入力する。それらの機器状態情報は、それらの機器に設置したセンサ(図示せず)で検出される。駆動制御部68はこれらの機器状態情報がメモリ69から読み出し第2散乱体の種類、吸収体の厚み、及びブロックコリメータ開口径の情報のうち該当する情報と一致するかを判定する。一致しない機器状態情報がある場合、すなわちその判定が「NO」である場合には、駆動制御部68はインターロック装置72にインターロック信号を出力する。インターロック装置72は、そのインターロック信号に基づいて開閉スイッチ10を開く。このため、開閉スイッチ9が閉じた状態であっても、第1高周波電源8からの高周波の高周波印加装置5への供給が停止され、シンクロトロン4からのイオンビームの出射が停止される。なお、その判定が「YES」である場合には、インターロック装置72は開閉スイッチ10を開かないため、開閉スイッチ9が閉じられていると、シンクロトロン4からのイオンビームの出射が継続される。
【0063】
照射制御・判定部66は、ゲート信号生成装置37から出力されるゲート信号のON/OFFのタイミングが所望のタイミングであるかどうかを判定する。この詳細について以下に説明する。照射制御・判定部66には、ゲート信号生成装置37から出力される基準信号及びゲート信号が入力される。これら基準信号及びゲート信号は、イオンビームを患者22に照射している間、リアルタイムに(又は例えば一定周期おきに)照射制御装置64の照射制御・判定部66に入力される。照射制御・判定部66の位相判定回路83、ゲート判定1回路84及びゲート判定2回路85は、入力した基準信号及びゲート信号に基づいてそれぞれタイマを起動し、カウントした時間Tp(ゲート信号全体とRMW40の回転との位相差に相当する時間)、T1(ゲート信号がOFFである時間)、T2(ゲート信号がONである時間)とメモリ69に記憶されているそれぞれの目標値(許容範囲を含む)Tp limit ± Etp, T1 limit ± Et1, T2 limit ± Et2とを比較する。時間Tp,T1,T2のうち1つでも許容範囲に入っていない場合には、所望のタイミングでゲート信号がON/OFFされていないとみなし、照射制御・判定部66はビーム出射停止信号を開閉スイッチ9に出力する。この出射停止信号の出力により、開閉スイッチ9が開き、シンクロトロン4からのイオンビームの出射が停止される。また照射制御・判定部66はインターロック信号(ゲート位相・タイミング異常信号)をインターロック装置72に出力し、ビームシャッタ38を閉じる。これにより、シンクロトロン4からのイオンビームの出射を確実に停止することができる。
【0064】
一方、時間Tp,T1,T2が全て許容範囲に入っている場合には、所望のタイミングでゲート信号がON/OFFされているとみなし、照射制御・判定部66はゲート信号をそのまま開閉スイッチ9に出力する(すなわち出射開始信号及び出射停止信号を通常通り出力する)。これにより、患者22へのイオンビームの照射が継続される。このイオンビームの照射は、前述したように線量モニタ31の検出信号を基に得られた線量が目標線量に達するまで行われる。なお、照射制御・判定部66から出力されたゲート位相・タイミング異常信号は、表示装置54に表示される。但し、正常な場合にもその旨を表示するようにしてもよい。
【0065】
本実施形態の荷電粒子ビーム出射装置24によれば、RMW40を回転させた状態でイオンビームをON/OFF制御するため、回転方向において、RMW40内でイオンビームが通過する領域を、RMW40の回転方向において、変化させることができる。このため、1つのRMW40で、患者22の体表面からの深さ方向で異なる幅を有する複数のSOBP幅を形成することができ、1つのRMW40を複数の患者に使用することができる。すなわち、1つのRMW40を用いて治療できる患者数が増加する。また、1つのRMW40を用いて、複数のSOBP幅を形成することができるため、荷電粒子ビーム出射装置24を有するがん治療センタで準備するRMWの個数が低減できる。1つのRMW40で複数のSOBP幅を形成できることは、照射装置16に設置されたRMWの交換回数が減少する。これは、治療の準備に要する時間が短縮されることになり、荷電粒子ビーム出射装置24における患者の治療人数が増加できる。特に、本実施形態は、イオンビームのON/OFF制御をRMW40の回転角度(具体的には回転角度の計測値及び設定値)に基づいて行っているため、特定のSOBP幅を精度良く形成することができる。ビームのON/OFF制御を行うRMWの回転角度を変えることによって、種々のSOBP幅を形成することができる。
【0066】
シンクロトロン4では、加速されるイオンの数が同じであるため、ビームONの期間を短縮しても、第1高周波電源8から高周波印加装置5に供給する出射用の高周波のパワーを増加することによって、ビームONの期間中にシンクロトロン4から出射されるイオンビームの電流密度を増大できる。このため、ビームONの期間が短くても患者に照射される線量率(単位時間当りで単位体積当りに照射される放射線量)を増大できる。厚さの薄い患部K、または体積が小さい患部Kを有する患者22に対しては、電流密度が増大されたイオンビームを照射することによってイオンビームの照射時間を短縮できる。この照射時間の短縮は、患者22の負担を軽減でき、1年間当りの治療人数を増加できる。ビームONの期間を短縮する場合でも、出射用の高周波のパワーを前述のように増大することによって、周回する全てのイオンビームを実質的にシンクロトロン4から出射させることができるため、シンクロトロン4等の機器の放射化の度合いが低下する。
【0067】
加速器としてシンクロトロンの代りにサイクロトロンを用い、サイクロトロンから出射されたイオンビームを照射装置16に導くことが考えられる。しかしながら、サイクロトロンは、シンクロトロンのように減速工程がなく、イオンビームの入射、加速及び出射の各工程を連続して行うため、「ビームON」の期間を短くすると、単位時間当りに照射装置16から出射されるイオンの数が減少する。しかしながら、患部Kに対する線量率は変わらない。これは、SOBP幅を減少させる、つまり、照射体積を減らしていることと等価である。この結果、「ビームON」の期間を短くしても、厚さの薄い患部K、または体積が小さい患部Kを有する患者22に対しては、イオンビームの照射時間が変わらない。サイクロトロンにおいて「ビームOFF」をイオンビームの加速過程または加速後に行えば、捨てられるイオンビーム量が多くなり、サイクロトロン等の機器の放射化が増加する。
【0068】
本実施形態の荷電粒子ビーム出射装置24によれば、ゲート信号生成装置37からのゲート信号のON/OFF、すなわちシンクロトロン4からのビーム出射のON/OFFが所望のタイミングで行われているかどうかを、イオンビームの照射中にリアルタイムに確認することができる。そして、ゲート信号のON/OFFが所望のタイミングで行われていない場合には、イオンビームの出射を停止できるので、治療計画で設定したSOBP幅と異なる異常なSOBP幅が患者22内で形成されることを避けることができる。このため、イオンビームによる治療の安全性が著しく向上する。さらに本実施形態によれば、ゲート信号のON/OFFが所望のタイミングで行われていない場合には、イオンビームの出射を停止すると共にビームシャッタ38を閉じる。これにより、シンクロトロン4からのビームの出射を確実に停止することができる。このように、本実施形態では異常発生時のビーム停止手段を2重に設けているため、患者への誤照射が確実に避けられ、高い安全性が得られる。
【0069】
また本実施形態では、前述したように、検出された、第1散乱体、第2散乱体装置29、飛程調整装置30の機器状態情報に異常がなければ、ゲート信号のON/OFF、すなわちシンクロトロン4からのビーム出射のON/OFFが所望のタイミングで行われている場合には、所望のSOBP幅が形成されていることになる。したがって、上記機器状態が正常である場合には、本実施形態により、RMW40に対するビームON/OFF制御により形成された実SOBP幅が、所望のSOBP幅設定値であるか否かをイオンビームの照射中にリアルタイムに確認することができる。
【0070】
さらに本実施形態によれば、照射制御・判定部66から出力されたゲート位相・タイミング異常信号が表示装置54に表示されるため、医者(または放射線技師)はビームON/OFFのタイミングの異常(すなわち患者22内で形成されているSOBP幅の異常)を確認できる。このため、万が一、表示装置54にゲート位相・タイミング異常が表示されているにも拘わらず、インターロック装置72等の異常により、シンクロトロン4からのイオンビームの出射が停止されない場合には、医者(または放射線技師)は制御室内のオペレータコンソール(図示せず)に設けられたビーム出射停止ボタンを押すことにより、開閉スイッチ10を開くことができる。すなわち、手動でシンクロトロン4からのイオンビームの出射を停止できる。
【0071】
(実施形態2)
本発明の他の実施形態である荷電粒子ビーム出射装置を、図11及び図12を用いて以下に説明する。本実施形態の荷電粒子ビーム出射装置は、前述の実施形態1の照射制御装置64における時間Tp,T1,T2をタイマで計測する照射制御・判定部66を、内部クロック又は外部クロックを備え、時間Tp,T1,T2をそれらクロックをカウントすることにより計測する照射制御・判定部(判定装置、第3制御装置)66Aに置き替えた構成を有する。
【0072】
図11は本実施形態におけるRMW40の回転とゲート信号の関係を示す図であり、図12は照射制御・判定部66Aの判定機能を表す機能ブロック図である。これら図11及び図12において、前述の図7及び図8と同様の部分には同符号を付し、説明を省略する。
【0073】
これら図11及び図12において、本実施形態では、ゲート位相やゲート時間判定のために内部クロックまたは角度クロックを用いる。いずれも判定をする際に時間単位を与えるものであるが、内部クロックは照射制御装置64A自身が有するクロック発生装置(例えば水晶発振器等)から発生するクロックである。一方、角度クロックは例えば照射装置16に設けられRMW40の回転に同期して発するパルス信号のことである。当然ながら、角度クロックを用いずに、内部クロックをカウントすることにより判定を行うことも可能であり、この場合は角度クロックは不要である。しかしながら、角度クロックを使用するメリットは、万一、RMW40の回転数が変化した場合であっても、RMW40の回転と同期したクロックでゲート信号を判定できるため、RMW40の回転数変化に影響されずに正しい判定ができるということにある。したがって、ここでは角度クロック発生装置(クロック発生装置。例えばエンコーダ等)89を設け、角度クロックを用いる場合を考える。
【0074】
図12に示すように、照射制御・判定部66Aには、ゲート信号生成装置37からゲート信号(図12中(1))及び基準信号(図12中(2))が入力される。ゲート信号生成装置37から入力された基準信号は前述の実施形態1と同様に位相判定回路83に入力され、これにより位相判定回路83は図示しないカウンタ(カウント装置)を起動し、角度クロック発生装置89から入力される角度クロック(図12中(5))のカウントを開始する。一方、入力されたゲート信号は、前述の実施形態1と同様に入力処理回路81によりゲート信号の立ち下がり又は立ち上がりが検出され、立ち下がりが検出された場合には、入力処理回路81からゲートパルス1信号(図12中(3))がホールド回路82を介して上記の位相判定回路83に入力され、前述の(i)式に示した判定内容と同様のTp判定が行われる。
【0075】
また、入力処理回路81からのゲートパルス1信号(図12中(3))はゲート判定3回路88にも入力される。これによりゲート判定3回路88は図示しないカウンタを起動し、角度クロック発生装置89から入力される角度クロック(図12中(5))のカウントを開始する。その後、立ち上がりが検出された場合には、入力処理回路81からゲートパルス2信号(図12中(4))がゲート判定3回路88に入力され、前述の(ii)式に示した判定内容と同様のT1判定が行われる。その後、引き続きカウンタを積算し、再度立ち下がりが検出された場合には、入力処理回路81からゲートパルス1信号(図12中(3))がゲート判定3回路88に入力され、前述の(iii)式に示したT2判定が行われる。すなわち、ゲート判定3回路88は、ゲート信号がOFFの時間T1及びゲート信号がOFF及びONの時間T2を目標値と比較して判定する(図11も参照)。
【0076】
以上の判定回路83,88のいずれかで判定が満たされなかった場合には、前述の実施形態1と同様に異常信号がOR回路86で合成され、ゲート位相・ゲートタイミング異常検出信号が生成される。本信号は否定(Not)を経由して後段のAND回路87に入る。このAND回路87により、ゲートタイミングが正常なときのみビーム出射開始信号又はビーム出射停止信号を開閉スイッチ9に与え、ビーム出射のON/OFF制御を行うことができる。一方、判定回路83,88のいずれかでゲートタイミング異常検出がなされた場合、開閉スイッチ9へのゲート信号の出力がOFFとなり(開閉スイッチ9にビーム出射停止信号が出力されて)開閉スイッチ9が開き、シンクロトロン4からのビーム出射が停止する。またインターロック装置72に対してインターロック信号が出力され、これによりインターロック装置72がシャッタ38を閉じてビームが照射装置16側に輸送されることを防止する。
【0077】
本実施形態によれば、RMW40の回転に同期した角度クロックをゲートタイミングの位相・時間判定に使用するため、万一RMW40の回転数が変化した場合であっても補正等が不要で正しく判定が行える。さらに、本実施形態では、ゲート判定3回路88においてクロックを連続的に積算することにより1羽根分のゲート時間判定を1個のカウンタによりカウントし、ゲートパルス位置を比較するため、判定に必要なカウンタの個数を少なくすることができる。その結果、通常の個数(実施形態1におけるタイマと同等の個数)のカウンタを設けた場合には、本実施形態のように2個のゲートパルスを扱う場合より多数のゲートパルスを扱うことが可能となるため、より緻密な判定を行うことが可能となる。
【0078】
(実施形態3)
本発明のさらに他の実施形態である荷電粒子ビーム出射装置を、図13乃至図15を用いて以下に説明する。本実施形態の荷電粒子ビーム出射装置は、前述の実施形態1及び2の照射制御装置64,64Aにおける時間Tp,T1,T2をタイマ又はカウンタで計測し目標値と比較することにより判定を行う照射制御・判定部66,66Aを、アドレスを更新可能なメモリデータを用いて比較判定を行う照射制御・判定部(判定装置、第3制御装置)66Bに置き替え、ゲート信号生成装置をさらにもう1つ付加した構成を有する。
【0079】
図13は本実施形態の荷電粒子ビーム出射装置の照射装置の構造を表す縦断面図である。この図13において、前述の図2と同様の部分には同符号を付し説明を省略する。
【0080】
この図13に示すように、本実施形態の荷電粒子ビーム出射装置は、ゲート信号生成装置37に加えてもう1つのゲート信号生成装置(第2制御装置)96を備えている。このゲート信号生成装置96は、ゲート信号生成装置37と同様に角度計51から入力されたRMW40の回転角度に応じて基準信号を生成し出力すると共に、角度計51の図示しないエンコーダが出力するエンコーダ出力パルスを角度クロックとして照射制御・判定部66Bに出力する。
【0081】
図14は本実施形態におけるRMW40の回転とゲート信号の関係を示す図であり、図15は照射制御・判定部66Bの判定機能を表す機能ブロック図である。これら図14及び図15において、前述の図7及び図8又は図11及び図12と同様の部分には同符号を付し、説明を省略する。
【0082】
図14に示すように、本実施形態では、上記したようにゲート信号の判定をタイマやカウンタで行うのではなく、照射制御・判定部66Bが有するゲートメモリと呼ぶメモリデータを用いてゲート信号の比較を行う。ゲートメモリのアドレス更新は、内部クロック又は角度クロックに同期して行えば足りる。ここでは、上記したゲート信号生成装置96から入力される角度クロックを用いる。ゲートメモリにはゲート信号のON/OFFに対応したデータが書き込まれる。例えば、本実施形態ではゲート信号がONであるべき期間は「1」、OFFであるべき期間は「0」が書き込まれる。アドレスはRMW40が1周するごとに発生する基準信号によりリセットされる。
【0083】
図15において、アドレスカウンタ90はゲート信号生成装置96から入力される角度クロック(図15中(3))をカウントし、ゲートメモリ(記憶装置)91のアドレスを指定する。また、アドレスカウンタ90は、基準信号(図15中(2))によりリセットされるので、RMW40が1周するごとに動作を繰り返す。ゲートメモリ91のデータは処理ロジック92に入力される。一方、ゲート信号発生装置37から出力されるゲート信号(図15中(1))も処理ロジック92に入力される。この処理ロジック92では、ゲート信号発生装置37からのゲート信号とゲートメモリ91の読出データとの排他的論理和(XOR)が取られる。XOR処理の結果であるT12(図14参照)は両者のズレに相当する。判定回路93は本信号の大きさを判定するもので、ズレの大きさが制限値(T12 limit)を超えた場合(T12 > T12 limit)、異常と判定されインターロック信号がインターロック装置72に対して出力される。この場合、開閉スイッチ9にはビーム出射停止信号が出力されるのでシンクロトロン4からのビーム出射が停止する。さらに、インターロック装置72がシャッタ38を閉じてビームが照射装置16側に輸送されることを防止する。
【0084】
本実施形態ではゲート信号発生装置96のゲート信号を使うことなく、本来の(ゲート信号発生装置37の)ゲート信号の健全性を判定することができるため、例えばレゾルバや磁気エンコーダから構成される一般に複雑なゲート信号発生装置の数を増やすことなく、装置の安全性を高めることができる。
【0085】
(実施形態4)
本発明のさらに他の実施形態である荷電粒子ビーム出射装置を、図16を用いて以下に説明する。本実施形態の荷電粒子ビーム出射装置は、上述した実施形態3と同様にゲート信号生成装置をさらにもう1つ付加すると共に、前述の実施形態1の照射制御装置64における照射制御・判定部66を、2つのゲート信号生成装置からのゲート信号をそのまま比較することにより判定を行う照射制御・判定部(判定装置、第3制御装置)66Cに置き替えた構成を有する。
【0086】
図16は本実施形態における照射制御・判定部66Cの判定機能を表す機能ブロック図である。この図16において前述の図15等と同様の部分には同符号を付し説明を省略する。
【0087】
この図16に示すように、本実施形態ではゲート信号発生装置37から出力されるゲート信号とゲート信号発生装置96から出力されるゲート信号(第2制御信号)とをそのまま処理ロジック94に入力し、排他的論理和をとる。これにより2つのゲート信号のズレdTが検出される。そして、判定回路95によりズレdTが判定許容値dT limitを超過する(dT > dT limit)かどうかを判定する。ズレdTが判定許容値dT limitを超過し異常と判定された場合、インターロック信号がインターロック装置72に対して出力される。この場合、開閉スイッチ9にはビーム出射停止信号が出力されるのでシンクロトロン4からのビーム出射が停止する。さらに、インターロック装置72がシャッタ38を閉じてビームが照射装置16側に輸送されることを防止する。
【0088】
本実施形態によれば、2つのゲート信号の各々についてゲートタイミングを計測し判定を行う必要がなく、両者のズレのみによってRMW40の羽根部ごとに判定することができるため、判定手法を簡潔にすることができる。
【0089】
なお、以上では、角度計51とゲート信号生成装置37,96とによるゲート信号の生成手法として、角度計51のRMW40と同期して回転するエンコーダが出力するエンコーダ出力パルスをカウントし、出力パルスカウント値が予め記憶されたゲートON及びOFFするタイミングに相当するカウント目標値に一致したときにゲート信号をON又はOFFするようにしたが、これに限らない。すなわち、例えばエンコーダの代わりにレゾルバを適用する方式でもよい。レゾルバはステータコイルと回転コイルからなり、基準正弦波に対して、回転により位相のずれた正弦波出力を得るものである。このレゾルバを角度計51に内蔵し(又はRMW40近傍に設け)ておき、この出力を用いてゲート信号を発生させるようにしてもよい。また、RMW40又は回転軸48,49等の外周を磁気的、機械的または光学的に周期的な変化を与えるように加工し、適宜の検出器により回転パルスの形で回転情報を得るようにして、この回転パルスをカウントすることによりゲート信号を発生させるようにしてもよい。
【図面の簡単な説明】
【0090】
【図1】本発明の第1実施形態の荷電粒子ビーム出射装置の全体構成図である。
【図2】図1に示す照射装置の詳細構成を表す縦断面図である。
【図3】図1に示すRMWの斜視図である。
【図4】図3に示したRMWの平面図であり、イオンビームの出射のケースa〜cを例として示したものである。
【図5】図4に示すケースa〜cにおけるそれぞれのビームON及びビームOFFを時系列で示した図である。
【図6】図4に示すケースa〜cのそれぞれに対する深さ方向の線量分布及びSOBP幅を示す図である。
【図7】図3に示したRMWの回転とゲート信号の関係を示す図である。
【図8】図1に示した照射制御・判定部の判定機能を表す機能ブロック図である。
【図9】図2に示す照射制御装置のメモリに記憶された治療計画情報の一例を示す説明図である。
【図10】図1に示す照射制御・判定部で実行される制御ステップに係るフローチャートである。
【図11】本発明の第2実施形態におけるRMWの回転とゲート信号の関係を示す図である。
【図12】本発明の第2実施形態における照射制御・判定部の判定機能を表す機能ブロック図である。
【図13】本発明の第3実施形態における照射装置の詳細構成を表す縦断面図である。
【図14】本発明の第3実施形態におけるRMWの回転とゲート信号及びゲートメモリの関係を示す図である。
【図15】図13に示す照射制御・判定部の判定機能を表す機能ブロック図である。
【図16】本発明の第4実施形態における照射制御・判定部の判定機能を表す機能ブロック図である。
【符号の説明】
【0091】
1 荷電粒子ビーム発生装置
4 シンクロトロン
5 高周波印加装置
16 照射装置
24 荷電粒子ビーム出射装置
37 ゲート信号生成装置(第1制御装置)
40 RMW(回転体)
66 照射制御・判定部(判定装置、第3制御装置)
66A 照射制御・判定部(判定装置、第3制御装置)
66B 照射制御・判定部(判定装置、第3制御装置)
66C 照射制御・判定部(判定装置、第3制御装置)
89 角度クロック発生装置(クロック発生装置)
91 ゲートメモリ(記憶装置)
96 ゲート信号生成装置(第2制御装置)
【特許請求の範囲】
【請求項1】
荷電粒子ビームを照射対象に対して出射する荷電粒子ビーム出射装置において、
前記荷電粒子ビームを発生する荷電粒子ビーム発生装置と、
前記荷電粒子ビーム発生装置から出射された前記荷電粒子ビームの進行方向における厚みが変化し、通過する前記荷電粒子ビームのエネルギーを変えて前記照射対象内に拡大ブラッグピーク幅を形成させる回転体を有し、前記回転体を通過した前記荷電粒子ビームを前記照射対象に対して出射する照射装置と、
前記回転体の回転角度に基づいて前記荷電粒子ビーム発生装置からの前記荷電粒子ビームの出射及び出射停止を制御する第1制御装置と、
前記第1制御装置により前記荷電粒子ビームの出射及び出射停止の制御が所望のタイミングで行われているかどうかを判定する判定装置とを備えたことを特徴とする荷電粒子ビーム出射装置。
【請求項2】
前記回転体の回転角度に基づいて第1制御信号の出力をON/OFFすることにより、前記荷電粒子ビーム発生装置からの前記荷電粒子ビームの出射及び出射停止を制御する前記第1制御装置を備えた請求項1記載の荷電粒子ビーム出射装置。
【請求項3】
前記第1制御信号の出力のON/OFFのタイミングとこれらタイミングの目標値とを比較することにより、前記第1制御装置による前記荷電粒子ビームの出射及び出射停止の制御が所望のタイミングで行われているかどうかを判定する前記判定装置を備えた請求項2記載の荷電粒子ビーム出射装置。
【請求項4】
前記回転体の回転角度に基づいて第2制御信号の出力をON/OFFする第2制御装置を備えたことを特徴とする請求項2記載の荷電粒子ビーム出射装置。
【請求項5】
前記第1制御信号と前記第2制御信号とを比較することにより、前記荷電粒子ビームの出射及び出射停止の制御が所望のタイミングで行われているかどうかを判定する前記判定装置を備えた請求項4記載の荷電粒子ビーム出射装置。
【請求項6】
前記第2制御信号のON/OFFによりアドレスを更新する記憶装置と、前記記憶装置のアドレスと前記第1制御信号とを比較することにより、前記荷電粒子ビームの出射及び出射停止の制御が所望のタイミングで行われているかどうかを判定する前記判定装置とを備えた請求項4記載の荷電粒子ビーム出射装置。
【請求項7】
前記判定装置により前記荷電粒子ビームの出射及び出射停止の制御が所望のタイミングで行われていないと判定されたとき、前記荷電粒子ビームの出射を停止するように前記荷電粒子ビーム発生装置を制御する第3制御装置を備えた請求項3,5又は6記載の荷電粒子ビーム出射装置。
【請求項8】
前記第1制御信号の出力のON/OFFタイミングを計測するタイマー装置を備えた請求項3記載の荷電粒子ビーム出射装置。
【請求項9】
クロックを発生するクロック発生装置と、前記第1制御信号の出力のON/OFFタイミングを前記クロック発生装置で発生したクロックをカウントすることにより計測するカウント装置とを備えた請求項3記載の荷電粒子ビーム出射装置。
【請求項10】
前記判定装置に設けられ、所定の時間周期でクロックを発生する前記クロック発生装置を備えた請求項9記載の荷電粒子ビーム出射装置。
【請求項11】
前記回転体の回転に同期してクロックを発生する前記クロック発生装置を備えた請求項9記載の荷電粒子ビーム出射装置。
【請求項12】
前記荷電粒子ビーム発生装置がシンクロトロンを含んでいる請求項1記載の荷電粒子ビーム出射装置。
【請求項13】
高周波印加装置を有するシンクロトロンを含む前記荷電粒子ビーム発生装置と、前記判定装置により前記荷電粒子ビームの出射及び出射停止の制御が所望のタイミングで行われていないと判定されたとき、前記シンクロトロンからの前記荷電粒子ビームの出射を停止するために、前記高周波印加装置への高周波の印加を停止させる前記第3制御装置を備えた請求項7記載の荷電粒子ビーム出射装置。
【請求項14】
前記高周波印加装置への高周波の供給及び供給停止をすることにより、前記荷電粒子ビームの出射及び出射停止を制御する前記第1制御装置を備えた請求項13記載の荷電粒子ビーム出射装置。
【請求項15】
荷電粒子ビーム発生装置から出射された荷電粒子ビームを、前記荷電粒子ビームの進行方向における厚みが変化し、通過する前記荷電粒子ビームのエネルギーを変えて前記照射対象内に拡大ブラッグピーク幅を形成させる回転体を有する照射装置より出射させる荷電粒子ビーム出射方法において、
前記回転体の回転角度に基づいて前記荷電粒子ビーム発生装置からの前記荷電粒子ビームの出射及び出射停止を制御し、
前記荷電粒子ビームの出射及び出射停止の制御が所望のタイミングで行われているかどうかを判定することを特徴とする荷電粒子ビーム出射方法。
【請求項16】
前記回転体の回転角度に基づいて第1制御信号の出力をON/OFFすることにより、前記荷電粒子ビーム発生装置からの前記荷電粒子ビームの出射及び出射停止を制御する請求項15記載の荷電粒子ビーム出射方法。
【請求項17】
前記第1制御信号の出力のON/OFFのタイミングとこれらタイミングの目標値とを比較することにより、前記荷電粒子ビームの出射及び出射停止の制御が所望のタイミングで行われているかどうかを判定する請求項16記載の荷電粒子ビーム出射方法。
【請求項18】
前記回転体の回転角度に基づいて第2制御信号の出力をON/OFFすることを特徴とする請求項16記載の荷電粒子ビーム出射方法。
【請求項19】
前記第1制御信号と前記第2制御信号とを比較することにより、前記荷電粒子ビームの出射及び出射停止の制御が所望のタイミングで行われているかどうかを判定する請求項18記載の荷電粒子ビーム出射方法。
【請求項20】
前記第2制御信号のON/OFFにより更新されるアドレスと前記第1制御信号とを比較することにより、前記荷電粒子ビームの出射及び出射停止の制御が所望のタイミングで行われているかどうかを判定する請求項18記載の荷電粒子ビーム出射方法。
【請求項21】
前記荷電粒子ビームの出射及び出射停止の制御が所望のタイミングで行われていないと判定されたとき、前記荷電粒子ビームの出射を停止する請求項17,19又は20記載の荷電粒子ビーム出射方法。
【請求項1】
荷電粒子ビームを照射対象に対して出射する荷電粒子ビーム出射装置において、
前記荷電粒子ビームを発生する荷電粒子ビーム発生装置と、
前記荷電粒子ビーム発生装置から出射された前記荷電粒子ビームの進行方向における厚みが変化し、通過する前記荷電粒子ビームのエネルギーを変えて前記照射対象内に拡大ブラッグピーク幅を形成させる回転体を有し、前記回転体を通過した前記荷電粒子ビームを前記照射対象に対して出射する照射装置と、
前記回転体の回転角度に基づいて前記荷電粒子ビーム発生装置からの前記荷電粒子ビームの出射及び出射停止を制御する第1制御装置と、
前記第1制御装置により前記荷電粒子ビームの出射及び出射停止の制御が所望のタイミングで行われているかどうかを判定する判定装置とを備えたことを特徴とする荷電粒子ビーム出射装置。
【請求項2】
前記回転体の回転角度に基づいて第1制御信号の出力をON/OFFすることにより、前記荷電粒子ビーム発生装置からの前記荷電粒子ビームの出射及び出射停止を制御する前記第1制御装置を備えた請求項1記載の荷電粒子ビーム出射装置。
【請求項3】
前記第1制御信号の出力のON/OFFのタイミングとこれらタイミングの目標値とを比較することにより、前記第1制御装置による前記荷電粒子ビームの出射及び出射停止の制御が所望のタイミングで行われているかどうかを判定する前記判定装置を備えた請求項2記載の荷電粒子ビーム出射装置。
【請求項4】
前記回転体の回転角度に基づいて第2制御信号の出力をON/OFFする第2制御装置を備えたことを特徴とする請求項2記載の荷電粒子ビーム出射装置。
【請求項5】
前記第1制御信号と前記第2制御信号とを比較することにより、前記荷電粒子ビームの出射及び出射停止の制御が所望のタイミングで行われているかどうかを判定する前記判定装置を備えた請求項4記載の荷電粒子ビーム出射装置。
【請求項6】
前記第2制御信号のON/OFFによりアドレスを更新する記憶装置と、前記記憶装置のアドレスと前記第1制御信号とを比較することにより、前記荷電粒子ビームの出射及び出射停止の制御が所望のタイミングで行われているかどうかを判定する前記判定装置とを備えた請求項4記載の荷電粒子ビーム出射装置。
【請求項7】
前記判定装置により前記荷電粒子ビームの出射及び出射停止の制御が所望のタイミングで行われていないと判定されたとき、前記荷電粒子ビームの出射を停止するように前記荷電粒子ビーム発生装置を制御する第3制御装置を備えた請求項3,5又は6記載の荷電粒子ビーム出射装置。
【請求項8】
前記第1制御信号の出力のON/OFFタイミングを計測するタイマー装置を備えた請求項3記載の荷電粒子ビーム出射装置。
【請求項9】
クロックを発生するクロック発生装置と、前記第1制御信号の出力のON/OFFタイミングを前記クロック発生装置で発生したクロックをカウントすることにより計測するカウント装置とを備えた請求項3記載の荷電粒子ビーム出射装置。
【請求項10】
前記判定装置に設けられ、所定の時間周期でクロックを発生する前記クロック発生装置を備えた請求項9記載の荷電粒子ビーム出射装置。
【請求項11】
前記回転体の回転に同期してクロックを発生する前記クロック発生装置を備えた請求項9記載の荷電粒子ビーム出射装置。
【請求項12】
前記荷電粒子ビーム発生装置がシンクロトロンを含んでいる請求項1記載の荷電粒子ビーム出射装置。
【請求項13】
高周波印加装置を有するシンクロトロンを含む前記荷電粒子ビーム発生装置と、前記判定装置により前記荷電粒子ビームの出射及び出射停止の制御が所望のタイミングで行われていないと判定されたとき、前記シンクロトロンからの前記荷電粒子ビームの出射を停止するために、前記高周波印加装置への高周波の印加を停止させる前記第3制御装置を備えた請求項7記載の荷電粒子ビーム出射装置。
【請求項14】
前記高周波印加装置への高周波の供給及び供給停止をすることにより、前記荷電粒子ビームの出射及び出射停止を制御する前記第1制御装置を備えた請求項13記載の荷電粒子ビーム出射装置。
【請求項15】
荷電粒子ビーム発生装置から出射された荷電粒子ビームを、前記荷電粒子ビームの進行方向における厚みが変化し、通過する前記荷電粒子ビームのエネルギーを変えて前記照射対象内に拡大ブラッグピーク幅を形成させる回転体を有する照射装置より出射させる荷電粒子ビーム出射方法において、
前記回転体の回転角度に基づいて前記荷電粒子ビーム発生装置からの前記荷電粒子ビームの出射及び出射停止を制御し、
前記荷電粒子ビームの出射及び出射停止の制御が所望のタイミングで行われているかどうかを判定することを特徴とする荷電粒子ビーム出射方法。
【請求項16】
前記回転体の回転角度に基づいて第1制御信号の出力をON/OFFすることにより、前記荷電粒子ビーム発生装置からの前記荷電粒子ビームの出射及び出射停止を制御する請求項15記載の荷電粒子ビーム出射方法。
【請求項17】
前記第1制御信号の出力のON/OFFのタイミングとこれらタイミングの目標値とを比較することにより、前記荷電粒子ビームの出射及び出射停止の制御が所望のタイミングで行われているかどうかを判定する請求項16記載の荷電粒子ビーム出射方法。
【請求項18】
前記回転体の回転角度に基づいて第2制御信号の出力をON/OFFすることを特徴とする請求項16記載の荷電粒子ビーム出射方法。
【請求項19】
前記第1制御信号と前記第2制御信号とを比較することにより、前記荷電粒子ビームの出射及び出射停止の制御が所望のタイミングで行われているかどうかを判定する請求項18記載の荷電粒子ビーム出射方法。
【請求項20】
前記第2制御信号のON/OFFにより更新されるアドレスと前記第1制御信号とを比較することにより、前記荷電粒子ビームの出射及び出射停止の制御が所望のタイミングで行われているかどうかを判定する請求項18記載の荷電粒子ビーム出射方法。
【請求項21】
前記荷電粒子ビームの出射及び出射停止の制御が所望のタイミングで行われていないと判定されたとき、前記荷電粒子ビームの出射を停止する請求項17,19又は20記載の荷電粒子ビーム出射方法。
【図1】



【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】

【図11】
【図12】
【図13】

【図14】
【図15】
【図16】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【公開番号】特開2006−341069(P2006−341069A)
【公開日】平成18年12月21日(2006.12.21)
【国際特許分類】
【出願番号】特願2005−365330(P2005−365330)
【出願日】平成17年12月19日(2005.12.19)
【出願人】(000005108)株式会社日立製作所 (27,607)
【Fターム(参考)】
【公開日】平成18年12月21日(2006.12.21)
【国際特許分類】
【出願日】平成17年12月19日(2005.12.19)
【出願人】(000005108)株式会社日立製作所 (27,607)
【Fターム(参考)】
[ Back to top ]