
荷電粒子ビーム装置
【課題】ウェーハ面内の反りの影響を排除して特定の位置に精度良く移動する傾斜荷電粒子ビーム装置を提供する。
【解決手段】基準点として予めステージ平面と同じ水平と高さを決めた視野合せ調整用マーク47を形成した部位46をウェーハホールダ上に設けた。試料上の観察点の高さをマーク47の高さに調整し、その時の傾斜カラムと垂直カラムの視野の既知のオフセットを用いることにより、傾斜カラムと垂直カラムの視野を一致させる。
【解決手段】基準点として予めステージ平面と同じ水平と高さを決めた視野合せ調整用マーク47を形成した部位46をウェーハホールダ上に設けた。試料上の観察点の高さをマーク47の高さに調整し、その時の傾斜カラムと垂直カラムの視野の既知のオフセットを用いることにより、傾斜カラムと垂直カラムの視野を一致させる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、試料面に対して傾斜したカラムを有する荷電粒子ビーム装置に関する。
【背景技術】
【0002】
半導体ウェーハに形成された微細パターンの観察や加工のために、走査電子顕微鏡(SEM)や集束イオンビーム装置(FIB)等の荷電粒子ビーム装置が用いられている。
【0003】
特表2002−503870号公報に、FIBとSEMの2つのカラムの軸がそれぞれZ軸に対し45°傾斜していて、かつ、互いの軸が垂直の関係にあり、軸にオフセットがない改良型集束イオンビーム装置が開示されている。
【0004】
【特許文献1】特表2002−503870号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
特表2002−503870号公報には、FIBとSEMの軸にオフセットがある場合については開示がない。また、試料高さの違いによるSEMとFIBの像の視野ずれの問題、ビームのフォーカス調整後の視野ずれの問題については開示がない。更に、傾斜カラムでは避けられないアライメント点の高さの違いによる位置の読み取り誤差の問題についても何も開示されていない。
【0006】
半導体ウェーハの欠陥検査では、検査装置で検出された欠陥位置を別の装置で解析する必要があるが、装置間で座標系が違う(ステージの測長系の違いによるウェーハ座標系の中心、回転、X,Yの歪み、等)ので、装置間でウェーハアライメントを行い、位置を合わせる補正をしなければならない。ウェーハ検査装置で検出された欠陥位置に移動して画面から欠陥を探すためには、少なくとも移動した先の像視野内に欠陥が入ることが必要である。また欠陥を識別するには、欠陥を認識できるだけの拡大が必要である。そこで、欠陥を識別するために必要な倍率を見積もる。欠陥の大きさが0.1μmになると、倍率×10kでは欠陥の大きさが1mmで、画角140mmに表示すると14μmが表示される。欠陥を2mmまで大きくできれば比較的容易に欠陥を特定できる。この倍率は、×20kで7μmの表示である。今後、デバイスの集積化がますます進み、現在の90nmノードが2005,6年には65nmノードになるとすると、デバイスの欠陥もノードと共に小さくなる。従って、65nmの欠陥を2mmに拡大して探すには、倍率×30k程度で5μm未満の表示が必要である。従って、位置決め精度が±3μm以下必要になる。
【0007】
ウェーハに対して垂直なカラムで行う通常のウェーハアライメントでは、ウェーハ高さが変化してもフォーカスが変動するだけで位置の変化はない。従って、ウェーハ高さを考慮しなくてもウェーハアライメントで精度よく位置を合わせることができる。しかし、ウェーハに対して傾斜したカラム装置の場合、ウェーハアライメントがアライメントする点の高さで位置が変わるため、ウェーハアライメントする点を予め決めた基準高さに常に合わせる必要がある。ところが、通常ウェーハは反っていてウェーハ面内で高低差がある。
【0008】
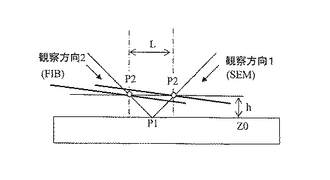
図1に示すように、FIBとSEMの各ビームがウェーハを載せるステージのX,Y平面に垂直な軸Zに対して傾斜している場合、2つのビームの交点がある高さの点P1を観察する場合、ステージを移動せずに点P1を観察できる。しかし、観察点の高さがZ0でないときには2つのビームの観察視野が異なり、例えば高さhにある点P2をSEMで観察しているとき、同じ観察点にFIBの焦点を合わせるためにはステージ移動Lが必要となる。
【0009】
先に述べたようにSEMやFIBをウェーハ検査に用いる場合、欠陥検査装置で指定された位置に、少なくとも3μm程度の精度で移動できなければならない。ステージに対して垂直なカラム装置の場合、観察点の高さが変化しても観察位置(X,Y)は変化しない。従って、ウェーハアライメントを実施すれば3μm程度の精度で位置に決めることができる。しかし、傾斜カラムにおいては、斜め観察であるため観察点の高さが変わると観察位置(X,Y)が変化する。加工対象がウェーハの場合、洗浄、露光、現像、蒸着、エッチング、熱処理、など半導体プロセスを経るに従ってウェーハが反って歪むことになる。このため、φ300mmのウェーハの反りは200μmにもなる。45°の傾斜カラムの場合、この反りがそのまま像の視野ずれになり、アライメント精度が落ちて結果として位置決め精度を悪くする。この場合、オフセット量を正確に把握できていなければ、位置決め精度が悪くなる。
【0010】
本発明は、傾斜カラムを備える荷電粒子ビーム装置において位置決め精度を向上させることを目的とする。
【課題を解決するための手段】
【0011】
課題を解決するため、基準となる調整点の高さと位置を決める。このためステージ上に視野合せ調整用のマークを有する部位を設け、Z軸に平行な光軸を有するカラムと、Z軸に対して傾斜した光軸を有するカラムのオフセットをこのマークを用いて測定する。
【0012】
本発明によるアライメント方法は、試料を保持してXY平面内及びXY平面に垂直なZ軸方向に移動可能なステージと、Z軸に平行な光軸を有する第1のカラムと、Z軸に対して傾斜した光軸を有する第2のカラムとを備える荷電粒子ビーム装置のアライメント方法であり、基準高さにあるマークを第1のカラムの視野中心に位置させ、そのマークのステージ座標を求めるステップと、前記マークを第2のカラムの視野中心に位置させ、そのマークのステージ座標を求めるステップと、第1のカラムによるマークのステージ座標と第2のカラムによるマークのステージ座標の差分を、第1のカラムの視野と第2のカラムの視野のオフセットとして求めるステップとを有する。
【0013】
試料上の特定位置へのアライメントに当たっては、ステージをXY平面内で移動し、第1のカラムの視野中心に試料上の既知マークを位置させるステップと、オフセット分だけステージを移動するステップと、第2のカラムで既知マークを観察し、視野中心からのずれ量を求めるステップと、そのずれ量をもとに基準高さからの試料の高さずれを求めるステップと、求めた高さずれ分だけステージをZ軸方向に移動し、既知マークが設けられた試料表面を基準高さに調整するステップとを有する。
【発明の効果】
【0014】
本発明によると、Z軸に対して傾斜したカラムを備える荷電粒子ビーム装置においても、ウェーハ面内の反りの影響を排除して特定の位置に精度良く視野移動することができ、ウェーハ検査装置から得られた欠陥位置に容易に移動して欠陥解析を行うことができる。傾斜したSEMカラムと傾斜したFIBカラムを備える場合であっても、SEMによる観察から直ちにFIBによる観察・加工に移行することができる。
【0015】
ウェーハホールダ上のビーム調整用マークでウェーハアライメント前に調整することによって、試料高さを自動的に基準面高さに自己修復することができ、FIBとSEMのビーム調整前後で軸が変わる問題、ウェーハ面内の観察点の高さの違いによる視野ずれ問題を解消して、傾斜カラムにおけるウェーハアライメント精度を向上することができる。
【発明を実施するための最良の形態】
【0016】
以下、図面を参照して本発明の実施の形態を説明する。
【0017】
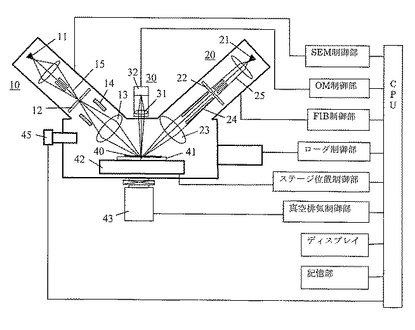
図2は、本発明による傾斜カラム荷電粒子ビーム装置の構成例を示す図である。この傾斜カラム荷電粒子ビーム装置は、ステージ平面に対し垂直の光学顕微鏡(OM)カラム30と、ステージ平面に対し斜めになった走査電子顕微鏡(SEM)カラム10及び集束イオンビーム(FIB)カラム20を備えるデュアルビーム装置である。ウェーハ40はウェーハホールダ41に保持され、X,Y,Z,Rの4軸からなるステージ42によって移動される。ステージ42の位置は、レーザ測長系によって計測される。
【0018】
SEMカラム10は、Zr/Wなどのショットキー放射電子源からなる電子銃11、ビーム電流を制限するビーム制限アパーチャ12、ウェーハ40に電子ビーム15を絞るレンズ系13、ウェーハ面上をビーム走査するための偏向器14を備える。FIBカラム20は、Ga液体金属イオン源からなるイオン銃21、イオンビーム25を制限するビーム制限アパーチャ22、ウェーハにイオンビームを絞るレンズ系23、ウェーハ面上をビーム走査するための偏向器24を備える。OMカラム30は、光源、対物レンズ31、CCDカメラ32を備える。
【0019】
FIBとSEMの各ビームは直交し、かつ、ウェーハを載せるステージ42のX,Y平面に垂直な軸Zに対して傾斜している。ここでは、原点を通るZ−Y平面内にSEMカラムの光軸があり、原点を通るZ−X平面内にFIBカラムの光軸があるものとして説明する。SEMの電子ビーム入射方向はZ軸と45°の角度をなし、FIBのイオンビームはZ軸と45°の角度をなしている。OMカラムの光軸は軸Zに対して平行である。各ビームは、必ずしも相互に一点で交わっていなくてもよい。
【0020】
荷電粒子検出器45から得られた信号は、増幅したのち走査信号と同期をとってディスプレイに入力され像が表示される。装置はCPUで集中管理され、OM制御部でOMの明るさやフォーカスを制御し、SEM制御部で電子ビームの加速、ビーム電流、フォーカス、偏向を制御し、FIB制御部でイオンビームの加速、ビーム電流、フォーカス、偏向を制御する。また、ローダ制御部でウェーハホールダの出し入れの制御、ステージ制御部でレーザ測長されたステージ42の駆動・位置制御、真空排気制御部で真空排気装置43を制御する。
【0021】
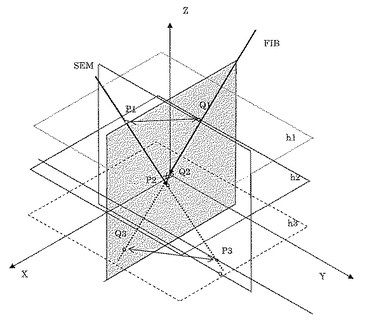
傾斜カラムが有する問題点を図3に示す。図3は、SEMのビーム軸がYZ平面にあってZ軸に対して傾斜しており、FIBのビーム軸がXZ平面にあってZ軸に対して傾斜している荷電粒子ビーム装置のSEMとFIBの観察点の関係を示した図である。図の配置の場合、試料面の高さがh1のときSEMの観察点はP1、FIBの観察点はQ1であり、両者のオフセットはP1Q1である。試料面の高さがh2のときは、SEMの観察点はP2、FIBの観察点はQ2になり、両者のオフセットはP2Q2である。また、試料面の高さがh3のときは、SEMの観察点はP3、FIBの観察点はQ3であって、両者のオフセットはP3Q3になる。このように、傾斜した複数のカラムを備える荷電粒子ビーム装置の場合、同じ観察点を観察しようとすると、観察点の高さに応じたオフセット(向きと大きさの異なるベクトルで表すことができる)を持つことになり、オフセット分ウェーハを移動する必要がある。
【0022】
図3に示したように、傾斜カラムの場合、同じ観察点を観察しようとすると、観察点の高さに応じたオフセット(向きと大きさの異なるベクトルで表すことができる)を持つことになり、オフセット分ウェーハを移動する必要があり、煩わしい。この煩わしさは、ウェーハ内の観察点の高さが変わらないように高さを制御することで解消される。
【0023】
一般にウェーハは反っていて、半導体デバイスを作るプロセスを経るに従って、また、ウェーハ口径が大きくなるに従って、ウェーハの反りが増して面内の高低差が大きくなり易い。従来からウェーハ高さを測定する方法として光(レーザ)を用いたZセンサーがある。しかし、ウェーハ面高さを測る目的は、フォーカスがずれないように制御するのが目的で、アライメント精度を向上するためではなかった。また、Zセンサーの測定精度は、半導体デバイスの配線パターン等の影響でレーザ光が干渉する問題があり、ウェーハによっては数十μm程度の誤測定することがあるため欠陥位置を正確に捉えるための目的には精度的に問題がある。また、光学顕微鏡のフォーカス深度が浅いことを利用してウェーハの高さ合せに使うことも考えられるが、光学顕微鏡の分解能と焦点深度には関係があり、高さ測定の精度を上げようとすると分解能を上げる必要があり高倍率を必要とする。このため、ウェーハと対物レンズの距離(WD)が短くなり、設置にFIBやSEMの対物レンズと干渉が避けられない。
【0024】
一般にウェーハ検査装置、検査解析装置のステージのX−Y座標は、レーザ測長系で計測されるので、位置精度は0.01μm程度と非常に高い。レーザ測長系ステージを備えた傾斜したカラム装置でウェーハアライメントの精度を上げるには、Zセンサーに変わる正確なウェーハ面高さの測定法が必要になる。
【0025】
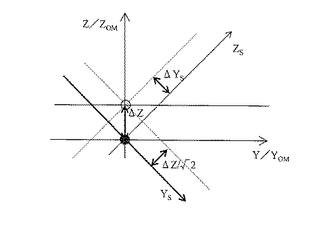
図4により、ステージをZ方向に移動したとき、垂直カラムの座標系と傾斜カラムの座標系での移動量の違いについて説明する。図4の座標系では、SEMの観察方向の軸は、Y−Z平面内でZ軸に対して45°傾いた方向である。SEMに固有の座標系を(Xs,Ys,Zs)とすると、回転の関係式は以下の式で表される。Zs軸はSEMの観察方向に平行な軸、Ys軸はZs軸に垂直でY−Z平面内にある軸、Xs軸はX軸に平行な軸である。
【0026】
【数1】

【0027】
従って、ステージをZ方向にΔZ移動するとSEM観察ではXs方向には像は移動しない。しかし、像はYs方向にYs=−ΔZ/√2だけ移動し、Zs方向にZs=ΔZ/√2移動する。
【0028】
一方、OMに固有の座標系を(Xom,Yom,Zom)とすると、Xom及びYomはステージ座標系のX及びYと一致し、Zom方向はステージのZ軸と一致するので、OMに対する観察方向の関係式は次式で表される。
【0029】
【数2】
【0030】
OMの場合、高さ方向にΔZ変化してもX,Y方向には影響を受けない。つまり、ウェーハ内の特定の位置(X,Y)を求める場合、ウェーハに反りがあって高さ方向に変化がある場合でも、OMで検出するX,Y情報には高さの影響が無いので(X,Y)位置を正しく求めることができる。
【0031】
一般に荷電粒子ビームのカラムがステージのX,Y平面に対し垂直な装置では、ステージ高さZを変えるとWD(対物レンズと試料の距離)が変わるためフォーカス状態が変わるが観察位置は変化しない。しかし、ウェーハ面に対し傾斜したカラムを備えた装置ではウェーハの反りのためウェーハ面内の観察点で高さが違い、垂直カラムで観察した観察点のステージ位置と同じ観察点を傾斜カラムで観察した観察点のステージ位置が異なる。この影響でウェーハ内のデバイス欠陥位置に精度良く移動することができない。上記のように、斜め45°傾斜カラムの場合には、ステージをZ方向にΔZ移動するとSEM観察ではYs方向にYs=−ΔZ/√2だけ移動し、Zs方向にZs=ΔZ/√2だけ移動する。
【0032】
また、FIBとSEMのビーム調整(対物レンズ中心にビームを通しフォーカスさせる)で軸が変わるため、観察像の視野がビーム調整前後で変わることになる。この問題を解決するために、基準となる調整点の高さと位置を決める。このため、ウェーハホールダ上に視野合せ調整用のマークを有する部位を設けた。
【0033】
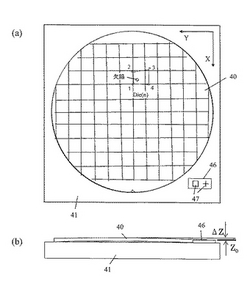
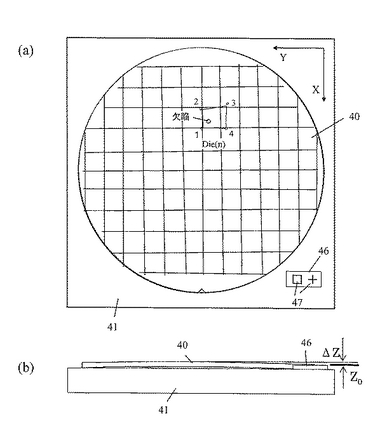
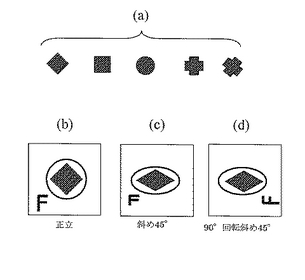
図5はウェーハを保持したウェーハホールダの概略図であり、図5(a)は平面図、図5(b)は側面図である。ウェーハホールダ41のウェーハ載置面以外の場所に、視野合せ調整用のマーク47が設けられた部位46を有する。視野合せ調整用マークが設けられた部位46の高さは、ウェーハ40の高さと略等しいのが好ましい。部位46の表面には、図6(a)に示すように、○□×+◇等、90°回転対象図形が視野合せ調整用マーク47として設けられている。視野合せ調整用マーク47として90°回転対象図形を用いると、90°方向の違う傾斜カラム、すなわちSEMカラムとFIBカラムにおいて同じ形状の図形として認識できるので好都合である。図6(b)〜(d)は、90°回転対象図形として菱形の図形を例に取り、上方から見たときの形状、斜め45゜方向から見たときの形状、90゜回転した斜め45゜方向から見たときの形状をそれぞれ示している。
【0034】
次に、図7及び図8のフローチャートを参照して本発明によるアライメント方法の手順について説明する。このアライメントは自動で行うことも可能である。
【0035】
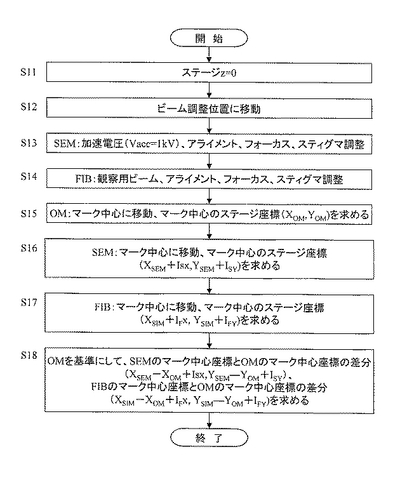
図7のステップ11においてステージのZ(垂直方向の駆動軸)方向位置を基準位置、例えばZ=0にする。このときの視野調整用マーク47の高さを基準高さとする。そして、ステップ12において視野調整用マーク47が設けられた部位46に移動する。そして視野調整用マーク47が設けられた部位46上で、ステップ13にて、SEMのビームアライメント、フォーカス、スティグマを調整する。ステップ14で、同様にFIBのビームアライメント、フォーカス、スティグマを調整する。
【0036】
調整後、ステップ15に進み、光学顕微鏡(OM)の像視野を部位46上の視野調整用マーク(例えば□)47に移動し、フォーカスを合わせてマーク中心のステージ座標(XOM, YOM)を求める。次に、ステップ16に進み、同じマークをSEMで観察してマーク中心のステージ座標(XSEM+ISX, YSEM+ISY)を求める。ただし、頭文字Iは、イメージシフトを表す。次に、ステップ17に進み、同じマークをFIBで観察してマーク中心のステージ座標(XSIM+IFX, YSIM+IFY)を求める。ステップ18では、OMを基準にして、SEMのマーク中心座標とOMのマーク中心座標の差分(XSEM-XOM+ISX, YSEM-YOM+ISY)、及びFIBのマーク中心座標とOMのマーク中心座標の差分(XSIM-XOM+IFX, YSIM-YOM+IFY)を求める。求めた差分は、OMとSEMの視野のオフセット及びOMとFIBの視野のオフセットとして装置の記憶部に記憶する。ここまでが初期調整である。
【0037】
次に、図8のフローチャートに従って、検査装置で検出されたウェーハ面内の欠陥位置に移動し、SEMによる観察、あるいはFIBによる加工を行う。
【0038】
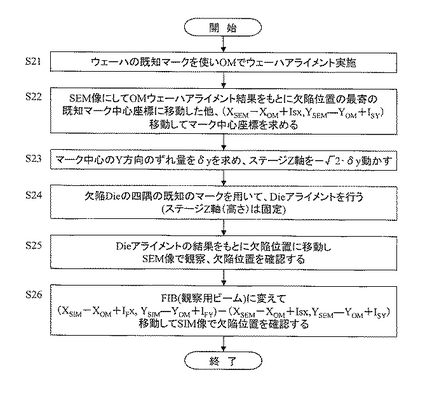
まず、最初にステップ21において、ウェーハの既知マークを使いOMでウェーハアライメントを行う。次に、ステップ22に進み、SEM像にしてOMウェーハアライメント結果をもとに欠陥位置の最寄の既知マーク中心座標に移動した後、先に求めたOMとSEMの像視野のオフセット分(XSEM-XOM+ISX, YSEM-YOM+ISY)だけ移動してマーク中心座標を求める。ステップ23で、マーク中心のY方向のずれ量δyを求める。このずれ量δyが基準高さからの違いとなるので、ステージZ軸を−√2・δy動かすとマーク中心は像中心になる。これによって、マーク位置近傍を基準高さにできたことになる。次のステップ24では、ステージの高さを変えることなく欠陥Die(あるいはShot)の四隅の既知のマークを用いて、後述するDieアライメントを行う。次に、ステップ25において、Dieアライメントの結果をもとに欠陥位置に移動しSEM像で観察、欠陥位置を確認する。このとき、視野の真中に欠陥を表示することができる。
【0039】
次にステップ26に進み、ステージをSEMとFIBの像視野のオフセット分{(XSIM-XOM+IFX, YSIM-YOM+IFY)−(XSEM-XOM+ISX, YSEM-YOM+ISY)}だけ移動し、FIB(観察用ビーム)に変えてSIM像で観察すると、視野内に欠陥を表示することができる。その後、FIBのビームを加工用のビームに変えて欠陥位置の断面加工またはサンプリング加工をFIBで行えば、欠陥部の断面加工などをスムーズに行うことができる。その後、SEMとFIBの像視野のオフセット分だけ視野移動すると、SEMで加工箇所を観察することができる。
【0040】
更に図4を用いて定量的に説明すると、OMアライメント精度は、倍率が100倍程度であるため精度が低いが±3μm程度を得ることができた。従って、OMアライメント後のマーク位置(X、Y)をSEMで観察した場合、X方向は3μm程度の誤差範囲にある。Y方向は、ウェーハの反りの影響で基準高さ(例えば、Zs=0)からΔZマークが高い位置にあるとすると、画面中心から(ΔYs)ずれる。45°傾斜ではΔYs=−ΔZ/√2であるから、ステージのZをΔZ’=√2・ΔYs変化させるとYS座標はΔYs−ΔZ’/√2になるのでマークを画面中心にすることができた。
【0041】
ウェーハ内の既存マーク(デバイス露光位置合せ用のマーク)を用いれば、ウェーハアライメントとDieアライメントを自動で行うことができる。また、視野合せに90°の回転対象図形のマークを用いれば、90°方向の違う傾斜カラムにおいて同じ形状の図形として認識できるので自動アライメントが容易になる。
【0042】
Dieアライメントについて説明する。Dieアライメント(図5の図中に示すDie(n))は、Die毎に4隅の既存のマーク位置(半導体デバイスの設計により、デバイス製造装置の位置合せ用に正確な位置に形成されている)に移動してマーク中心を検出して四角からの歪を求め、逆に四角に正確に戻す変換式を求める。これによって、傾斜カラム装置においても検査装置で求められた欠陥データに基づいてステージを移動して正確に欠陥位置に移動できる。
【0043】
検査装置の測定データは、ダイ毎にダイ原点に対する欠陥位置が求められているので、求めたダイの四隅のマーク位置からダイの座標系と観察装置の座標系の変換式を求めることができる。変換係数を(ai, bi)(i=0〜3)として、次式の関係式を仮定して変換式を求める。
【0044】
【数3】
【0045】
ただし、(Xi, Yi)(i=0〜3)は、マーク検出で得られた座標、(Xwi, Ywi)(i=0〜3)は、ダイのマーク位置(マーク設計座標)である。
【0046】
上式の行列の逆行列を求めると簡単に上式の変換係数(ai, bi)(i=0〜3)を求めることができる。検査装置からの欠陥位置(Xwj, Ywj)は、次式で(uj, vj)に変換される。
【0047】
【数4】
【0048】
この式に従ってステージを移動するビーム直下に欠陥位置を移動することができる。ただし、このときステージのZとRは動作しない。求めた変換式は、同じウェーハ内のDieであれば、Dieが異なっても略同じ変換式を使える。従って、一度計算して(ai, bi)(i=0〜3)を求めるのみで十分である。
【0049】
以上では、SEMアライメントを実施するとして述べたが、FIBを使ったアライメント(SIMアライメント)でも記述のXとYを入り替えると、SEMアライメントと同様である。
【図面の簡単な説明】
【0050】
【図1】傾斜カラムの観察点についての説明図。
【図2】本発明による傾斜カラム荷電粒子ビーム装置の構成例を示す図・
【図3】傾斜カラムの問題点を説明する図。
【図4】垂直カラムの座標系と傾斜カラムの座標系の説明図。
【図5】ウェーハを保持したウェーハホールダの概略図。
【図6】90°回転対象図形の例を示す図。
【図7】本発明によるアライメント方法の手順を示すフローチャート。
【図8】本発明によるアライメント方法の手順を示すフローチャート。
【符号の説明】
【0051】
10:走査電子顕微鏡(SEM)カラム、11:電子銃、12:ビーム制限アパーチャ、13:レンズ系、14:偏向器、15:電子ビーム、20:集束イオンビーム(FIB)カラム、21:イオン銃、22:ビーム制限アパーチャ、23:レンズ系、24:偏向器、25:イオンビーム、30:光学顕微鏡(OM)カラム、31:対物レンズ、32:CCDカメラ、40:ウェーハ、41:ウェーハホールダ、42:ステージ、43:真空排気装置、46:視野合せ調整用部位、47:視野合せ調整用マーク
【技術分野】
【0001】
本発明は、試料面に対して傾斜したカラムを有する荷電粒子ビーム装置に関する。
【背景技術】
【0002】
半導体ウェーハに形成された微細パターンの観察や加工のために、走査電子顕微鏡(SEM)や集束イオンビーム装置(FIB)等の荷電粒子ビーム装置が用いられている。
【0003】
特表2002−503870号公報に、FIBとSEMの2つのカラムの軸がそれぞれZ軸に対し45°傾斜していて、かつ、互いの軸が垂直の関係にあり、軸にオフセットがない改良型集束イオンビーム装置が開示されている。
【0004】
【特許文献1】特表2002−503870号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
特表2002−503870号公報には、FIBとSEMの軸にオフセットがある場合については開示がない。また、試料高さの違いによるSEMとFIBの像の視野ずれの問題、ビームのフォーカス調整後の視野ずれの問題については開示がない。更に、傾斜カラムでは避けられないアライメント点の高さの違いによる位置の読み取り誤差の問題についても何も開示されていない。
【0006】
半導体ウェーハの欠陥検査では、検査装置で検出された欠陥位置を別の装置で解析する必要があるが、装置間で座標系が違う(ステージの測長系の違いによるウェーハ座標系の中心、回転、X,Yの歪み、等)ので、装置間でウェーハアライメントを行い、位置を合わせる補正をしなければならない。ウェーハ検査装置で検出された欠陥位置に移動して画面から欠陥を探すためには、少なくとも移動した先の像視野内に欠陥が入ることが必要である。また欠陥を識別するには、欠陥を認識できるだけの拡大が必要である。そこで、欠陥を識別するために必要な倍率を見積もる。欠陥の大きさが0.1μmになると、倍率×10kでは欠陥の大きさが1mmで、画角140mmに表示すると14μmが表示される。欠陥を2mmまで大きくできれば比較的容易に欠陥を特定できる。この倍率は、×20kで7μmの表示である。今後、デバイスの集積化がますます進み、現在の90nmノードが2005,6年には65nmノードになるとすると、デバイスの欠陥もノードと共に小さくなる。従って、65nmの欠陥を2mmに拡大して探すには、倍率×30k程度で5μm未満の表示が必要である。従って、位置決め精度が±3μm以下必要になる。
【0007】
ウェーハに対して垂直なカラムで行う通常のウェーハアライメントでは、ウェーハ高さが変化してもフォーカスが変動するだけで位置の変化はない。従って、ウェーハ高さを考慮しなくてもウェーハアライメントで精度よく位置を合わせることができる。しかし、ウェーハに対して傾斜したカラム装置の場合、ウェーハアライメントがアライメントする点の高さで位置が変わるため、ウェーハアライメントする点を予め決めた基準高さに常に合わせる必要がある。ところが、通常ウェーハは反っていてウェーハ面内で高低差がある。
【0008】
図1に示すように、FIBとSEMの各ビームがウェーハを載せるステージのX,Y平面に垂直な軸Zに対して傾斜している場合、2つのビームの交点がある高さの点P1を観察する場合、ステージを移動せずに点P1を観察できる。しかし、観察点の高さがZ0でないときには2つのビームの観察視野が異なり、例えば高さhにある点P2をSEMで観察しているとき、同じ観察点にFIBの焦点を合わせるためにはステージ移動Lが必要となる。
【0009】
先に述べたようにSEMやFIBをウェーハ検査に用いる場合、欠陥検査装置で指定された位置に、少なくとも3μm程度の精度で移動できなければならない。ステージに対して垂直なカラム装置の場合、観察点の高さが変化しても観察位置(X,Y)は変化しない。従って、ウェーハアライメントを実施すれば3μm程度の精度で位置に決めることができる。しかし、傾斜カラムにおいては、斜め観察であるため観察点の高さが変わると観察位置(X,Y)が変化する。加工対象がウェーハの場合、洗浄、露光、現像、蒸着、エッチング、熱処理、など半導体プロセスを経るに従ってウェーハが反って歪むことになる。このため、φ300mmのウェーハの反りは200μmにもなる。45°の傾斜カラムの場合、この反りがそのまま像の視野ずれになり、アライメント精度が落ちて結果として位置決め精度を悪くする。この場合、オフセット量を正確に把握できていなければ、位置決め精度が悪くなる。
【0010】
本発明は、傾斜カラムを備える荷電粒子ビーム装置において位置決め精度を向上させることを目的とする。
【課題を解決するための手段】
【0011】
課題を解決するため、基準となる調整点の高さと位置を決める。このためステージ上に視野合せ調整用のマークを有する部位を設け、Z軸に平行な光軸を有するカラムと、Z軸に対して傾斜した光軸を有するカラムのオフセットをこのマークを用いて測定する。
【0012】
本発明によるアライメント方法は、試料を保持してXY平面内及びXY平面に垂直なZ軸方向に移動可能なステージと、Z軸に平行な光軸を有する第1のカラムと、Z軸に対して傾斜した光軸を有する第2のカラムとを備える荷電粒子ビーム装置のアライメント方法であり、基準高さにあるマークを第1のカラムの視野中心に位置させ、そのマークのステージ座標を求めるステップと、前記マークを第2のカラムの視野中心に位置させ、そのマークのステージ座標を求めるステップと、第1のカラムによるマークのステージ座標と第2のカラムによるマークのステージ座標の差分を、第1のカラムの視野と第2のカラムの視野のオフセットとして求めるステップとを有する。
【0013】
試料上の特定位置へのアライメントに当たっては、ステージをXY平面内で移動し、第1のカラムの視野中心に試料上の既知マークを位置させるステップと、オフセット分だけステージを移動するステップと、第2のカラムで既知マークを観察し、視野中心からのずれ量を求めるステップと、そのずれ量をもとに基準高さからの試料の高さずれを求めるステップと、求めた高さずれ分だけステージをZ軸方向に移動し、既知マークが設けられた試料表面を基準高さに調整するステップとを有する。
【発明の効果】
【0014】
本発明によると、Z軸に対して傾斜したカラムを備える荷電粒子ビーム装置においても、ウェーハ面内の反りの影響を排除して特定の位置に精度良く視野移動することができ、ウェーハ検査装置から得られた欠陥位置に容易に移動して欠陥解析を行うことができる。傾斜したSEMカラムと傾斜したFIBカラムを備える場合であっても、SEMによる観察から直ちにFIBによる観察・加工に移行することができる。
【0015】
ウェーハホールダ上のビーム調整用マークでウェーハアライメント前に調整することによって、試料高さを自動的に基準面高さに自己修復することができ、FIBとSEMのビーム調整前後で軸が変わる問題、ウェーハ面内の観察点の高さの違いによる視野ずれ問題を解消して、傾斜カラムにおけるウェーハアライメント精度を向上することができる。
【発明を実施するための最良の形態】
【0016】
以下、図面を参照して本発明の実施の形態を説明する。
【0017】
図2は、本発明による傾斜カラム荷電粒子ビーム装置の構成例を示す図である。この傾斜カラム荷電粒子ビーム装置は、ステージ平面に対し垂直の光学顕微鏡(OM)カラム30と、ステージ平面に対し斜めになった走査電子顕微鏡(SEM)カラム10及び集束イオンビーム(FIB)カラム20を備えるデュアルビーム装置である。ウェーハ40はウェーハホールダ41に保持され、X,Y,Z,Rの4軸からなるステージ42によって移動される。ステージ42の位置は、レーザ測長系によって計測される。
【0018】
SEMカラム10は、Zr/Wなどのショットキー放射電子源からなる電子銃11、ビーム電流を制限するビーム制限アパーチャ12、ウェーハ40に電子ビーム15を絞るレンズ系13、ウェーハ面上をビーム走査するための偏向器14を備える。FIBカラム20は、Ga液体金属イオン源からなるイオン銃21、イオンビーム25を制限するビーム制限アパーチャ22、ウェーハにイオンビームを絞るレンズ系23、ウェーハ面上をビーム走査するための偏向器24を備える。OMカラム30は、光源、対物レンズ31、CCDカメラ32を備える。
【0019】
FIBとSEMの各ビームは直交し、かつ、ウェーハを載せるステージ42のX,Y平面に垂直な軸Zに対して傾斜している。ここでは、原点を通るZ−Y平面内にSEMカラムの光軸があり、原点を通るZ−X平面内にFIBカラムの光軸があるものとして説明する。SEMの電子ビーム入射方向はZ軸と45°の角度をなし、FIBのイオンビームはZ軸と45°の角度をなしている。OMカラムの光軸は軸Zに対して平行である。各ビームは、必ずしも相互に一点で交わっていなくてもよい。
【0020】
荷電粒子検出器45から得られた信号は、増幅したのち走査信号と同期をとってディスプレイに入力され像が表示される。装置はCPUで集中管理され、OM制御部でOMの明るさやフォーカスを制御し、SEM制御部で電子ビームの加速、ビーム電流、フォーカス、偏向を制御し、FIB制御部でイオンビームの加速、ビーム電流、フォーカス、偏向を制御する。また、ローダ制御部でウェーハホールダの出し入れの制御、ステージ制御部でレーザ測長されたステージ42の駆動・位置制御、真空排気制御部で真空排気装置43を制御する。
【0021】
傾斜カラムが有する問題点を図3に示す。図3は、SEMのビーム軸がYZ平面にあってZ軸に対して傾斜しており、FIBのビーム軸がXZ平面にあってZ軸に対して傾斜している荷電粒子ビーム装置のSEMとFIBの観察点の関係を示した図である。図の配置の場合、試料面の高さがh1のときSEMの観察点はP1、FIBの観察点はQ1であり、両者のオフセットはP1Q1である。試料面の高さがh2のときは、SEMの観察点はP2、FIBの観察点はQ2になり、両者のオフセットはP2Q2である。また、試料面の高さがh3のときは、SEMの観察点はP3、FIBの観察点はQ3であって、両者のオフセットはP3Q3になる。このように、傾斜した複数のカラムを備える荷電粒子ビーム装置の場合、同じ観察点を観察しようとすると、観察点の高さに応じたオフセット(向きと大きさの異なるベクトルで表すことができる)を持つことになり、オフセット分ウェーハを移動する必要がある。
【0022】
図3に示したように、傾斜カラムの場合、同じ観察点を観察しようとすると、観察点の高さに応じたオフセット(向きと大きさの異なるベクトルで表すことができる)を持つことになり、オフセット分ウェーハを移動する必要があり、煩わしい。この煩わしさは、ウェーハ内の観察点の高さが変わらないように高さを制御することで解消される。
【0023】
一般にウェーハは反っていて、半導体デバイスを作るプロセスを経るに従って、また、ウェーハ口径が大きくなるに従って、ウェーハの反りが増して面内の高低差が大きくなり易い。従来からウェーハ高さを測定する方法として光(レーザ)を用いたZセンサーがある。しかし、ウェーハ面高さを測る目的は、フォーカスがずれないように制御するのが目的で、アライメント精度を向上するためではなかった。また、Zセンサーの測定精度は、半導体デバイスの配線パターン等の影響でレーザ光が干渉する問題があり、ウェーハによっては数十μm程度の誤測定することがあるため欠陥位置を正確に捉えるための目的には精度的に問題がある。また、光学顕微鏡のフォーカス深度が浅いことを利用してウェーハの高さ合せに使うことも考えられるが、光学顕微鏡の分解能と焦点深度には関係があり、高さ測定の精度を上げようとすると分解能を上げる必要があり高倍率を必要とする。このため、ウェーハと対物レンズの距離(WD)が短くなり、設置にFIBやSEMの対物レンズと干渉が避けられない。
【0024】
一般にウェーハ検査装置、検査解析装置のステージのX−Y座標は、レーザ測長系で計測されるので、位置精度は0.01μm程度と非常に高い。レーザ測長系ステージを備えた傾斜したカラム装置でウェーハアライメントの精度を上げるには、Zセンサーに変わる正確なウェーハ面高さの測定法が必要になる。
【0025】
図4により、ステージをZ方向に移動したとき、垂直カラムの座標系と傾斜カラムの座標系での移動量の違いについて説明する。図4の座標系では、SEMの観察方向の軸は、Y−Z平面内でZ軸に対して45°傾いた方向である。SEMに固有の座標系を(Xs,Ys,Zs)とすると、回転の関係式は以下の式で表される。Zs軸はSEMの観察方向に平行な軸、Ys軸はZs軸に垂直でY−Z平面内にある軸、Xs軸はX軸に平行な軸である。
【0026】
【数1】
【0027】
従って、ステージをZ方向にΔZ移動するとSEM観察ではXs方向には像は移動しない。しかし、像はYs方向にYs=−ΔZ/√2だけ移動し、Zs方向にZs=ΔZ/√2移動する。
【0028】
一方、OMに固有の座標系を(Xom,Yom,Zom)とすると、Xom及びYomはステージ座標系のX及びYと一致し、Zom方向はステージのZ軸と一致するので、OMに対する観察方向の関係式は次式で表される。
【0029】
【数2】
【0030】
OMの場合、高さ方向にΔZ変化してもX,Y方向には影響を受けない。つまり、ウェーハ内の特定の位置(X,Y)を求める場合、ウェーハに反りがあって高さ方向に変化がある場合でも、OMで検出するX,Y情報には高さの影響が無いので(X,Y)位置を正しく求めることができる。
【0031】
一般に荷電粒子ビームのカラムがステージのX,Y平面に対し垂直な装置では、ステージ高さZを変えるとWD(対物レンズと試料の距離)が変わるためフォーカス状態が変わるが観察位置は変化しない。しかし、ウェーハ面に対し傾斜したカラムを備えた装置ではウェーハの反りのためウェーハ面内の観察点で高さが違い、垂直カラムで観察した観察点のステージ位置と同じ観察点を傾斜カラムで観察した観察点のステージ位置が異なる。この影響でウェーハ内のデバイス欠陥位置に精度良く移動することができない。上記のように、斜め45°傾斜カラムの場合には、ステージをZ方向にΔZ移動するとSEM観察ではYs方向にYs=−ΔZ/√2だけ移動し、Zs方向にZs=ΔZ/√2だけ移動する。
【0032】
また、FIBとSEMのビーム調整(対物レンズ中心にビームを通しフォーカスさせる)で軸が変わるため、観察像の視野がビーム調整前後で変わることになる。この問題を解決するために、基準となる調整点の高さと位置を決める。このため、ウェーハホールダ上に視野合せ調整用のマークを有する部位を設けた。
【0033】
図5はウェーハを保持したウェーハホールダの概略図であり、図5(a)は平面図、図5(b)は側面図である。ウェーハホールダ41のウェーハ載置面以外の場所に、視野合せ調整用のマーク47が設けられた部位46を有する。視野合せ調整用マークが設けられた部位46の高さは、ウェーハ40の高さと略等しいのが好ましい。部位46の表面には、図6(a)に示すように、○□×+◇等、90°回転対象図形が視野合せ調整用マーク47として設けられている。視野合せ調整用マーク47として90°回転対象図形を用いると、90°方向の違う傾斜カラム、すなわちSEMカラムとFIBカラムにおいて同じ形状の図形として認識できるので好都合である。図6(b)〜(d)は、90°回転対象図形として菱形の図形を例に取り、上方から見たときの形状、斜め45゜方向から見たときの形状、90゜回転した斜め45゜方向から見たときの形状をそれぞれ示している。
【0034】
次に、図7及び図8のフローチャートを参照して本発明によるアライメント方法の手順について説明する。このアライメントは自動で行うことも可能である。
【0035】
図7のステップ11においてステージのZ(垂直方向の駆動軸)方向位置を基準位置、例えばZ=0にする。このときの視野調整用マーク47の高さを基準高さとする。そして、ステップ12において視野調整用マーク47が設けられた部位46に移動する。そして視野調整用マーク47が設けられた部位46上で、ステップ13にて、SEMのビームアライメント、フォーカス、スティグマを調整する。ステップ14で、同様にFIBのビームアライメント、フォーカス、スティグマを調整する。
【0036】
調整後、ステップ15に進み、光学顕微鏡(OM)の像視野を部位46上の視野調整用マーク(例えば□)47に移動し、フォーカスを合わせてマーク中心のステージ座標(XOM, YOM)を求める。次に、ステップ16に進み、同じマークをSEMで観察してマーク中心のステージ座標(XSEM+ISX, YSEM+ISY)を求める。ただし、頭文字Iは、イメージシフトを表す。次に、ステップ17に進み、同じマークをFIBで観察してマーク中心のステージ座標(XSIM+IFX, YSIM+IFY)を求める。ステップ18では、OMを基準にして、SEMのマーク中心座標とOMのマーク中心座標の差分(XSEM-XOM+ISX, YSEM-YOM+ISY)、及びFIBのマーク中心座標とOMのマーク中心座標の差分(XSIM-XOM+IFX, YSIM-YOM+IFY)を求める。求めた差分は、OMとSEMの視野のオフセット及びOMとFIBの視野のオフセットとして装置の記憶部に記憶する。ここまでが初期調整である。
【0037】
次に、図8のフローチャートに従って、検査装置で検出されたウェーハ面内の欠陥位置に移動し、SEMによる観察、あるいはFIBによる加工を行う。
【0038】
まず、最初にステップ21において、ウェーハの既知マークを使いOMでウェーハアライメントを行う。次に、ステップ22に進み、SEM像にしてOMウェーハアライメント結果をもとに欠陥位置の最寄の既知マーク中心座標に移動した後、先に求めたOMとSEMの像視野のオフセット分(XSEM-XOM+ISX, YSEM-YOM+ISY)だけ移動してマーク中心座標を求める。ステップ23で、マーク中心のY方向のずれ量δyを求める。このずれ量δyが基準高さからの違いとなるので、ステージZ軸を−√2・δy動かすとマーク中心は像中心になる。これによって、マーク位置近傍を基準高さにできたことになる。次のステップ24では、ステージの高さを変えることなく欠陥Die(あるいはShot)の四隅の既知のマークを用いて、後述するDieアライメントを行う。次に、ステップ25において、Dieアライメントの結果をもとに欠陥位置に移動しSEM像で観察、欠陥位置を確認する。このとき、視野の真中に欠陥を表示することができる。
【0039】
次にステップ26に進み、ステージをSEMとFIBの像視野のオフセット分{(XSIM-XOM+IFX, YSIM-YOM+IFY)−(XSEM-XOM+ISX, YSEM-YOM+ISY)}だけ移動し、FIB(観察用ビーム)に変えてSIM像で観察すると、視野内に欠陥を表示することができる。その後、FIBのビームを加工用のビームに変えて欠陥位置の断面加工またはサンプリング加工をFIBで行えば、欠陥部の断面加工などをスムーズに行うことができる。その後、SEMとFIBの像視野のオフセット分だけ視野移動すると、SEMで加工箇所を観察することができる。
【0040】
更に図4を用いて定量的に説明すると、OMアライメント精度は、倍率が100倍程度であるため精度が低いが±3μm程度を得ることができた。従って、OMアライメント後のマーク位置(X、Y)をSEMで観察した場合、X方向は3μm程度の誤差範囲にある。Y方向は、ウェーハの反りの影響で基準高さ(例えば、Zs=0)からΔZマークが高い位置にあるとすると、画面中心から(ΔYs)ずれる。45°傾斜ではΔYs=−ΔZ/√2であるから、ステージのZをΔZ’=√2・ΔYs変化させるとYS座標はΔYs−ΔZ’/√2になるのでマークを画面中心にすることができた。
【0041】
ウェーハ内の既存マーク(デバイス露光位置合せ用のマーク)を用いれば、ウェーハアライメントとDieアライメントを自動で行うことができる。また、視野合せに90°の回転対象図形のマークを用いれば、90°方向の違う傾斜カラムにおいて同じ形状の図形として認識できるので自動アライメントが容易になる。
【0042】
Dieアライメントについて説明する。Dieアライメント(図5の図中に示すDie(n))は、Die毎に4隅の既存のマーク位置(半導体デバイスの設計により、デバイス製造装置の位置合せ用に正確な位置に形成されている)に移動してマーク中心を検出して四角からの歪を求め、逆に四角に正確に戻す変換式を求める。これによって、傾斜カラム装置においても検査装置で求められた欠陥データに基づいてステージを移動して正確に欠陥位置に移動できる。
【0043】
検査装置の測定データは、ダイ毎にダイ原点に対する欠陥位置が求められているので、求めたダイの四隅のマーク位置からダイの座標系と観察装置の座標系の変換式を求めることができる。変換係数を(ai, bi)(i=0〜3)として、次式の関係式を仮定して変換式を求める。
【0044】
【数3】
【0045】
ただし、(Xi, Yi)(i=0〜3)は、マーク検出で得られた座標、(Xwi, Ywi)(i=0〜3)は、ダイのマーク位置(マーク設計座標)である。
【0046】
上式の行列の逆行列を求めると簡単に上式の変換係数(ai, bi)(i=0〜3)を求めることができる。検査装置からの欠陥位置(Xwj, Ywj)は、次式で(uj, vj)に変換される。
【0047】
【数4】
【0048】
この式に従ってステージを移動するビーム直下に欠陥位置を移動することができる。ただし、このときステージのZとRは動作しない。求めた変換式は、同じウェーハ内のDieであれば、Dieが異なっても略同じ変換式を使える。従って、一度計算して(ai, bi)(i=0〜3)を求めるのみで十分である。
【0049】
以上では、SEMアライメントを実施するとして述べたが、FIBを使ったアライメント(SIMアライメント)でも記述のXとYを入り替えると、SEMアライメントと同様である。
【図面の簡単な説明】
【0050】
【図1】傾斜カラムの観察点についての説明図。
【図2】本発明による傾斜カラム荷電粒子ビーム装置の構成例を示す図・
【図3】傾斜カラムの問題点を説明する図。
【図4】垂直カラムの座標系と傾斜カラムの座標系の説明図。
【図5】ウェーハを保持したウェーハホールダの概略図。
【図6】90°回転対象図形の例を示す図。
【図7】本発明によるアライメント方法の手順を示すフローチャート。
【図8】本発明によるアライメント方法の手順を示すフローチャート。
【符号の説明】
【0051】
10:走査電子顕微鏡(SEM)カラム、11:電子銃、12:ビーム制限アパーチャ、13:レンズ系、14:偏向器、15:電子ビーム、20:集束イオンビーム(FIB)カラム、21:イオン銃、22:ビーム制限アパーチャ、23:レンズ系、24:偏向器、25:イオンビーム、30:光学顕微鏡(OM)カラム、31:対物レンズ、32:CCDカメラ、40:ウェーハ、41:ウェーハホールダ、42:ステージ、43:真空排気装置、46:視野合せ調整用部位、47:視野合せ調整用マーク
【特許請求の範囲】
【請求項1】
試料を保持してXY平面内及び前記XY平面に垂直なZ軸方向に移動可能なステージと、
前記Z軸に平行な光軸を有する第1のカラムと、
前記Z軸に対して傾斜した光軸を有する第2のカラムと、
前記第1のカラムによる視野像及び第2のカラムによる視野像を処理するとともに前記ステージの移動を制御する制御部とを備え、
前記ステージ上に前記第1のカラムと第2のカラムの、視野合せ調整用のマークが形成された部位を有することを特徴とする荷電粒子ビーム装置。
【請求項2】
請求項1記載の荷電粒子ビーム装置において、前記視野合せ調整用のマークは90°回転対称な図形であることを特徴とする荷電粒子ビーム装置。
【請求項3】
請求項1又は2記載の荷電粒子ビーム装置において、前記視野合せ調整用のマークが形成された部位は、ウェーハを保持するウェーハホールダ上に設けられていることを特徴とする荷電粒子ビーム装置。
【請求項4】
請求項1〜3のいずれか1項記載の荷電粒子ビーム装置において、前記視野合せ調整用のマークのZ方向高さを基準高さに設定した状態で前記第1のカラムによって観察した前記マークのステージ座標と前記第2のカラムによって観察した前記マークのステージ座標の差分を、前記第1のカラムの視野と第2のカラムの視野のオフセットとして記憶していることを特徴とする荷電粒子ビーム装置。
【請求項5】
請求項1〜4のいずれか1項記載の荷電粒子ビーム装置において、前記第2のカラムは集束イオンビーム及び/又は走査電子顕微鏡であることを特徴とする荷電粒子ビーム装置。
【請求項6】
請求項5記載の荷電粒子ビーム装置において、前記集束イオンビームの光軸及び前記走査電子顕微鏡の光軸はそれぞれ前記Z軸に対して45゜傾斜し、かつ相互の光軸の交差角が90゜であることを特徴とする荷電粒子ビーム装置。
【請求項7】
請求項1〜6のいずれか1項記載の荷電粒子ビーム装置において、前記第1のカラムは光学顕微鏡であることを特徴とする荷電粒子ビーム装置。
【請求項8】
試料を保持してXY平面内及び前記XY平面に垂直なZ軸方向に移動可能なステージと、前記Z軸に平行な光軸を有する第1のカラムと、前記Z軸に対して傾斜した光軸を有する第2のカラムとを備える荷電粒子ビーム装置のアライメント方法において、
基準高さにあるマークを前記第1のカラムの視野中心に位置させ、前記マークのステージ座標を求めるステップと、
前記マークを前記第2のカラムの視野中心に位置させ、前記マークのステージ座標を求めるステップと、
前記第1のカラムによる前記マークのステージ座標と前記第2のカラムによる前記マークのステージ座標の差分を、前記第1のカラムの視野と第2のカラムの視野のオフセットとして求めるステップとを有することを特徴とするアライメント方法。
【請求項9】
請求項8記載のアライメント方法において、
前記ステージをXY平面内で移動し、前記第1のカラムの視野中心に試料上の既知マークを位置させるステップと、
前記オフセット分だけ前記ステージを移動するステップと、
前記第2のカラムで前記既知マークを観察し、視野中心からのずれ量を求めるステップと、
前記ずれ量をもとに前記基準高さからの試料の高さずれを求めるステップと、
求めた高さずれ分だけ前記ステージをZ軸方向に移動し、前記既知マークが設けられた試料表面を前記基準高さに調整するステップとを有することを特徴とするアライメント方法。
【請求項10】
試料を保持してXY平面内及び前記XY平面に垂直なZ軸方向に移動可能なステージと、前記Z軸に平行な光軸を有する光学顕微鏡と、YZ平面内で前記Z軸に対して45゜傾斜した光軸を有する第1のカラムと、XZ平面内で前記Z軸に対して45゜傾斜した光軸を有する第2のカラムとを備える装置のアライメント方法において、
基準高さにあるマークを前記光学顕微鏡の視野中心に位置させ、前記マークのステージ座標を求めるステップと、
前記マークを前記第1のカラムの視野中心に位置させ、前記マークのステージ座標を求めるステップと、
前記マークを前記第2のカラムの視野中心に位置させ、前記マークのステージ座標を求めるステップと、
前記光学顕微鏡による前記マークのステージ座標と前記第1のカラムによる前記マークのステージ座標の差分を第1のオフセットとして求め、前記光学顕微鏡による前記マークのステージ座標と前記第2のカラムによる前記マークのステージ座標の差分を第2のオフセットとして求めるステップとを有することを特徴とするアライメント方法。
【請求項11】
請求項10記載のアライメント方法において、
前記ステージをXY平面内で移動し、前記光学顕微鏡の視野中心に試料上の既知マークを位置させるステップと、
前記第1のオフセット分だけ前記ステージを移動するステップと、
前記第1のカラムで前記既知マークを観察し、視野中心からのY方向のずれ量ΔYを求めるステップと、
−√2・ΔYだけ前記ステージをZ軸方向に移動し、前記既知マークが設けられた試料表面を前記基準高さに調整するステップとを有することを特徴とするアライメント方法。
【請求項12】
請求項11記載のアライメント方法において、
前記第1のカラムによる観察の後、前記第2のオフセット分だけ前記ステージを移動させるステップと、
前記第2のカラムによって試料を観察するステップとを有することを特徴とするアライメント方法。
【請求項13】
請求項10〜12のいずれか1項記載のアライメント方法において、前記第1のカラムは走査電子顕微鏡であり、前記第2のカラムは集束イオンビーム装置であることを特徴とするアライメント方法。
【請求項1】
試料を保持してXY平面内及び前記XY平面に垂直なZ軸方向に移動可能なステージと、
前記Z軸に平行な光軸を有する第1のカラムと、
前記Z軸に対して傾斜した光軸を有する第2のカラムと、
前記第1のカラムによる視野像及び第2のカラムによる視野像を処理するとともに前記ステージの移動を制御する制御部とを備え、
前記ステージ上に前記第1のカラムと第2のカラムの、視野合せ調整用のマークが形成された部位を有することを特徴とする荷電粒子ビーム装置。
【請求項2】
請求項1記載の荷電粒子ビーム装置において、前記視野合せ調整用のマークは90°回転対称な図形であることを特徴とする荷電粒子ビーム装置。
【請求項3】
請求項1又は2記載の荷電粒子ビーム装置において、前記視野合せ調整用のマークが形成された部位は、ウェーハを保持するウェーハホールダ上に設けられていることを特徴とする荷電粒子ビーム装置。
【請求項4】
請求項1〜3のいずれか1項記載の荷電粒子ビーム装置において、前記視野合せ調整用のマークのZ方向高さを基準高さに設定した状態で前記第1のカラムによって観察した前記マークのステージ座標と前記第2のカラムによって観察した前記マークのステージ座標の差分を、前記第1のカラムの視野と第2のカラムの視野のオフセットとして記憶していることを特徴とする荷電粒子ビーム装置。
【請求項5】
請求項1〜4のいずれか1項記載の荷電粒子ビーム装置において、前記第2のカラムは集束イオンビーム及び/又は走査電子顕微鏡であることを特徴とする荷電粒子ビーム装置。
【請求項6】
請求項5記載の荷電粒子ビーム装置において、前記集束イオンビームの光軸及び前記走査電子顕微鏡の光軸はそれぞれ前記Z軸に対して45゜傾斜し、かつ相互の光軸の交差角が90゜であることを特徴とする荷電粒子ビーム装置。
【請求項7】
請求項1〜6のいずれか1項記載の荷電粒子ビーム装置において、前記第1のカラムは光学顕微鏡であることを特徴とする荷電粒子ビーム装置。
【請求項8】
試料を保持してXY平面内及び前記XY平面に垂直なZ軸方向に移動可能なステージと、前記Z軸に平行な光軸を有する第1のカラムと、前記Z軸に対して傾斜した光軸を有する第2のカラムとを備える荷電粒子ビーム装置のアライメント方法において、
基準高さにあるマークを前記第1のカラムの視野中心に位置させ、前記マークのステージ座標を求めるステップと、
前記マークを前記第2のカラムの視野中心に位置させ、前記マークのステージ座標を求めるステップと、
前記第1のカラムによる前記マークのステージ座標と前記第2のカラムによる前記マークのステージ座標の差分を、前記第1のカラムの視野と第2のカラムの視野のオフセットとして求めるステップとを有することを特徴とするアライメント方法。
【請求項9】
請求項8記載のアライメント方法において、
前記ステージをXY平面内で移動し、前記第1のカラムの視野中心に試料上の既知マークを位置させるステップと、
前記オフセット分だけ前記ステージを移動するステップと、
前記第2のカラムで前記既知マークを観察し、視野中心からのずれ量を求めるステップと、
前記ずれ量をもとに前記基準高さからの試料の高さずれを求めるステップと、
求めた高さずれ分だけ前記ステージをZ軸方向に移動し、前記既知マークが設けられた試料表面を前記基準高さに調整するステップとを有することを特徴とするアライメント方法。
【請求項10】
試料を保持してXY平面内及び前記XY平面に垂直なZ軸方向に移動可能なステージと、前記Z軸に平行な光軸を有する光学顕微鏡と、YZ平面内で前記Z軸に対して45゜傾斜した光軸を有する第1のカラムと、XZ平面内で前記Z軸に対して45゜傾斜した光軸を有する第2のカラムとを備える装置のアライメント方法において、
基準高さにあるマークを前記光学顕微鏡の視野中心に位置させ、前記マークのステージ座標を求めるステップと、
前記マークを前記第1のカラムの視野中心に位置させ、前記マークのステージ座標を求めるステップと、
前記マークを前記第2のカラムの視野中心に位置させ、前記マークのステージ座標を求めるステップと、
前記光学顕微鏡による前記マークのステージ座標と前記第1のカラムによる前記マークのステージ座標の差分を第1のオフセットとして求め、前記光学顕微鏡による前記マークのステージ座標と前記第2のカラムによる前記マークのステージ座標の差分を第2のオフセットとして求めるステップとを有することを特徴とするアライメント方法。
【請求項11】
請求項10記載のアライメント方法において、
前記ステージをXY平面内で移動し、前記光学顕微鏡の視野中心に試料上の既知マークを位置させるステップと、
前記第1のオフセット分だけ前記ステージを移動するステップと、
前記第1のカラムで前記既知マークを観察し、視野中心からのY方向のずれ量ΔYを求めるステップと、
−√2・ΔYだけ前記ステージをZ軸方向に移動し、前記既知マークが設けられた試料表面を前記基準高さに調整するステップとを有することを特徴とするアライメント方法。
【請求項12】
請求項11記載のアライメント方法において、
前記第1のカラムによる観察の後、前記第2のオフセット分だけ前記ステージを移動させるステップと、
前記第2のカラムによって試料を観察するステップとを有することを特徴とするアライメント方法。
【請求項13】
請求項10〜12のいずれか1項記載のアライメント方法において、前記第1のカラムは走査電子顕微鏡であり、前記第2のカラムは集束イオンビーム装置であることを特徴とするアライメント方法。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2006−127891(P2006−127891A)
【公開日】平成18年5月18日(2006.5.18)
【国際特許分類】
【出願番号】特願2004−314089(P2004−314089)
【出願日】平成16年10月28日(2004.10.28)
【出願人】(501387839)株式会社日立ハイテクノロジーズ (4,325)
【Fターム(参考)】
【公開日】平成18年5月18日(2006.5.18)
【国際特許分類】
【出願日】平成16年10月28日(2004.10.28)
【出願人】(501387839)株式会社日立ハイテクノロジーズ (4,325)
【Fターム(参考)】
[ Back to top ]