
荷電粒子線照射システム及び照射ノズル装置
【課題】入射ビーム位置を監視することができ、かつ荷電粒子ビーム径を拡大することなく、細いビームのまま照射することができる荷電粒子線照射システム及び照射ノズル装置を提供する。
【解決手段】上流ビーム位置モニタ装置6は、荷電粒子ビームが通過する中央部分の電極線の配置間隔を周辺部分よりも広くしたビーム位置モニタ17を備える。これにより荷電粒子ビームが当たるタングステンワイヤの本数が減るため、荷電粒子ビームの散乱が抑えられ、細いビームまま照射対象13に照射が可能となる。また、上流ビーム位置モニタ装置6の検出信号を用いてビーム位置を監視しながら、患者に安全で正確な荷電粒子ビーム照射が可能となる。
【解決手段】上流ビーム位置モニタ装置6は、荷電粒子ビームが通過する中央部分の電極線の配置間隔を周辺部分よりも広くしたビーム位置モニタ17を備える。これにより荷電粒子ビームが当たるタングステンワイヤの本数が減るため、荷電粒子ビームの散乱が抑えられ、細いビームまま照射対象13に照射が可能となる。また、上流ビーム位置モニタ装置6の検出信号を用いてビーム位置を監視しながら、患者に安全で正確な荷電粒子ビーム照射が可能となる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は荷電粒子線照射システム及び照射ノズル装置に係わり、特に走査電磁石装置によりスキャニング照射を実施する際に、荷電粒子ビームの照射位置を検知するためのビーム位置モニタ装置を備えた荷電粒子線照射システム及び照射ノズル装置に関する。
【背景技術】
【0002】
荷電粒子ビームを利用したがん治療は、がん患部にエネルギーを集中させることができるため、がん患部以外の正常組織への影響を低減でことができ、患者への負担が少ないがん治療法として注目を集めている。
【0003】
加速器などで生成した荷電粒子線をがん患部へ照射する方式として細い荷電粒子ビームを走査してがん患部へ照射するスキャニング照射方式と、荷電粒子ビームを散乱体で散乱させ、散乱されたビームをコリメータでがん患部の形状に合わせて照射するパッシブ照射方式の2つの方式がある。
【0004】
上記2つの方式のうち前者の細いビームを走査して照射するスキャニング照射方式には、ビームをジグザグ状或いはテレビの走査線のように横方向(X方向)及び縦方向(Y方向)に連続的に走査するラスター走査法(例えば、非特許文献1のp.2088,FIG46)、ビームの照射位置移動時にビーム照射を停止し、ビーム照射時にビームの移動を停止するスポットスキャニング法(特許文献1)、ビームを円形に走査するウォブラー法(例えば、非特許文献1のp.2084-2086,FIG41)等がある。
【0005】
これらスキャニング照射方式においては、ビームを走査する走査電磁石より上流のビーム通過位置が中心(ビーム軸)を通過する必要があり、このビーム位置を検出するために走査電磁石の上流に上流ビーム位置モニタ装置を設置し、照射位置精度の監視を行っている(特許文献2)。上流ビーム位置モニタ装置には電極線を直交する二方向に、それぞれ平行に張り渡したマルチワイヤ型ビームプロファイルモニタが用いられる(特許文献3)。電極線はタングステンワイヤである。
【0006】
【非特許文献1】Rev.Sci.Instrum.,Vol.64,No.8,August,1993
【特許文献1】特許第2833602号公報
【特許文献2】特開2005−296162号公報
【特許文献3】特開2001−236909号公報
【発明の開示】
【発明が解決しようとする課題】
【0007】
スキャニング照射方式では、照射対象物の照射境界の線量分布形状を精度よく照射するためには、照射する荷電粒子ビームの直径が小さい(ビームが細い)方が、精度よく線量分布を形成できる。しかし、ビームを走査する走査電磁石の上流には上流ビーム位置モニタ装置が設置されている。上流ビーム位置モニタ装置は電極線としてタングステンワイヤを張り渡したマルチワイヤ型ビームプロファイルモニタで構成されている。このため照射ノズル装置に入射し、上流ビーム位置モニタ装置を通過した荷電粒子ビームはタングステンワイヤに当たって散乱し、上流位置モニタ装置通過後の荷電粒子ビームの直径は通過前よりも拡大する。その結果、照射線量分布精度の低下、特に照射対象との境界部分において照射線量分布が悪くなる。
【0008】
上流ビーム位置モニタ装置を設置しない場合は、照射ノズル装置に入射するビームの通過位置が中心(ビーム軸)にあるかどうかを計測できず、目標とする照射位置を荷電粒子ビームが通過しているかどうかを監視することができないため、誤った位置への照射を行っても荷電粒子ビームを停止させることができなくなる。
【0009】
本発明の目的は、入射ビーム位置を監視することができ、かつ荷電粒子ビーム径を拡大することなく、細いビームのまま照射することができる荷電粒子線照射システム及び照射ノズル装置を提供することである。
【課題を解決するための手段】
【0010】
本発明は、上記目的を達成するために、上流ビーム位置モニタ装置の荷電粒子ビームが通過する中央部分の電極線の配置間隔を周辺部分よりも広くしたものである。
【0011】
これにより荷電粒子ビームが上流ビーム位置モニタ装置を通過するとき、荷電粒子ビームが当たるタングステンワイヤの本数が減るため、荷電粒子ビームの散乱が抑えられ、細いビームまま照射対象に照射が可能となる。その結果、特に、照射部位の境界部分の照射線量分布の精度を高くすることができる。また、上流ビーム位置モニタ装置が設置されているため、ビーム位置を検知することができ、入射ビームの位置を監視しながら、安全なビーム照射を行うことができる。
【発明の効果】
【0012】
本発明によれば、上流ビーム位置モニタ装置を通過するビームの散乱を抑え、細いビームのまま照射することができ、特に、照射境界部分の照射線量精度が高くすることができる。
【0013】
また、照射ノズル装置への入射ビーム位置を検知できるため、ビーム位置を監視しながら、安全なビーム照射を行うことができる。
【発明を実施するための最良の形態】
【0014】
以下、本発明の実施の形態を図面を参照しつつ説明する。
【実施例1】
【0015】
図1は本発明の第1の実施の形態における荷電粒子線照射システムの全体構成を示す図である。
【0016】
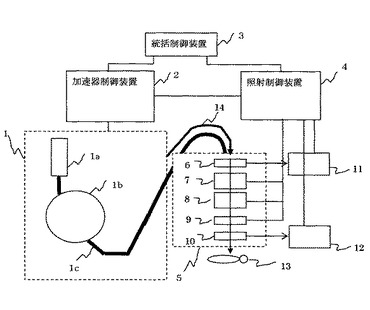
図1において、本実施の形態の荷電粒子線照射システムは荷電粒子ビーム発生装置1及び照射ノズル装置5を有している。
【0017】
荷電粒子ビーム発生装置1は、イオン源(図示せず)、前段加速器(例えば直線加速器)1a及びシンクロトロン1bを有し、イオン源で発生したイオン(例えば、陽子イオン(または炭素イオン)等の荷電粒子ビーム)は前段加速器1aで加速され、前段加速器1aからシンクロトロン1bに入射される。この荷電粒子ビームは、シンクロトロン1bで加速され、設定されたエネルギーまでに高められた後、出射される。シンクロトロン1bから出射された荷電粒子ビームはビーム輸送系1cを経て回転ガントリ(図示せず)内のビーム輸送系を経由して、回転ガントリに設けられた照射ノズル装置5へと輸送される。
【0018】
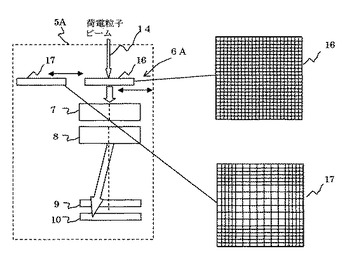
照射ノズル装置5は、上流ビーム位置モニタ装置6、Y軸方向の1対の走査電磁石7、X軸方向の1対の走査電磁石8、線量モニタ9、下流ビーム位置モニタ装置10を有している。照射ノズル装置5に輸送された荷電粒子ビームは照射ノズル装置5内の上流ビーム位置モニタ装置6を通過した後、走査電磁石7によりY軸方向に偏向され、走査電磁石8によりX軸方向にビームが偏向される。偏向されたビームは線量モニタ9及び下流ビーム位置モニタ装置10を通過し、照射対象13のがん患部の所定位置に照射される。ビームの照射中はビームの移動を停止し、停止した照射位置で線量モニタ9により照射線量値が計測される。照射線量値が所定の線量に達すると、ビーム照射(シンクロトロン1bからのビーム出射)を停止し、走査電磁石(Y軸)7及び走査電磁石(X軸)8の励磁電流を変更した後、再びビーム照射(シンクロトロン1bからのビーム出射)を開始し、次の照射位置にて再び線量モニタ9により照射線量値が計測される。このことを繰り返し、照射対象13の全体を照射する。
【0019】
本実施の形態の荷電粒子線治療システムは、またその制御系として、加速器制御装置2、統括制御装置3、照射制御装置4、上流ビーム位置モニタ制御装置11及び下流ビーム位置モニタ制御装置12を有している。
【0020】
統括制御装置3は、患者の処方箋データ(治療計画データ)をもとに加速器制御装置2と照射制御装置4に照射条件を設定する。加速器制御装置2は設定した照射条件に基づいてシンクロトロン1bを制御し、シンクロトロン1bを周回する荷電粒子ビームを設定したエネルギーまで加速するとともに、荷電粒子ビームの加速後、照射制御装置4で決定しビーム照射の停止・開始タイミング等の情報とに基づいてシンクロトロン1bからの荷電粒子ビームの出射開始及び停止を制御する。照射制御装置4は設定した照射条件(治療計画に基づく照射位置及びエネルギー)に基づいて走査電磁石7,8の励磁電流を計算し、電源(図示せず)に出力指令を送信することで、所定パターンの励磁電流を走査電磁石7,8に流し、荷電粒子ビームの照射位置を制御する。これと同時に、加速器制御装置2にビーム照射の開始タイミング指令を送信し、シンクロトロン1bから荷電粒子ビームを出射させる。また、照射制御装置4は線量モニタ9の検出信号により照射線量値を計測し、照射線量値が所定の線量に達すると、加速器制御装置2にビーム照射の停止タイミング指令を送信し、シンクロトロン1bからの荷電粒子ビームの出射を停止させる。
【0021】
上流ビーム位置モニタ制御装置11及び下流ビーム位置モニタ制御装置12は、それぞれ、荷電粒子ビームが所定のビーム幅で所定のビーム位置に照射されていることを監視し、異常が検知されると照射制御装置4から統括制御装置3にインターロック信号を出力する。統括制御装置3はそのインターロック信号を入力すると、直ちに荷電粒子ビーム発生装置1を停止させる。上流ビーム位置モニタ装置6及び下流ビーム位置モニタ装置10と照射制御装置4、上流ビーム位置モニタ制御装置11及び下流ビーム位置モニタ制御装置12はビーム位置モニタシステムを構成する。
【0022】
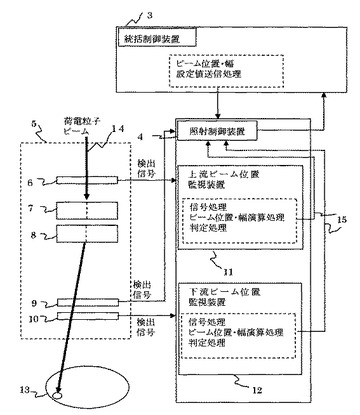
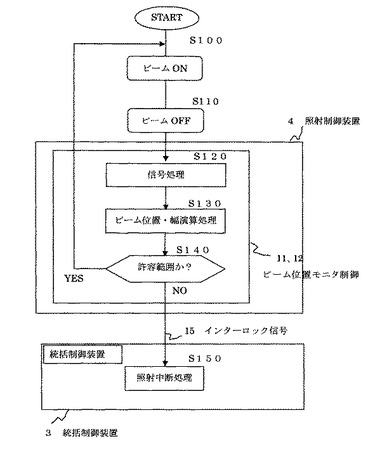
図2はビーム位置モニタシステムの機能を示すブロック図であり、図3はその機能を示すフローチャートである。
【0023】
照射制御装置4は設定した照射条件(治療計画に基づく照射位置及びエネルギー)に基づいて走査電磁石7,8の励磁電流を計算し、所定パターンの励磁電流を走査電磁石7,8に流し、荷電粒子ビームの照射位置を制御する。照射制御装置4は、これと同時に、加速器制御装置2にビーム照射の開始タイミング指令を送信し、シンクロトロン1bから荷電粒子ビームを出射させる(ステップS100)。出射された荷電粒子ビームは走査電磁石7,8により制御された照射位置に照射される。照射制御装置4は線量モニタ9の検出信号により照射線量値を計測し、照射位置での照射線量値が所定の線量に達すると、加速器制御装置2にビーム照射の停止タイミング指令を送信し、シンクロトロン1bからの荷電粒子ビームの出射を停止させる(ステップS110)。これにより設定された照射位置での荷電粒子ビームの照射が完了する。
【0024】
このように走査電磁石7,8によって制御された1つの照射位置でのビーム照射が完了すると、上流ビーム位置モニタ制御装置11及び下流ビーム位置モニタ制御装置12は、その間に上流ビーム位置モニタ装置6及び下流ビーム位置モニタ装置10によって検出した電荷量(検出信号)に基づいてビーム照射の健全性チェックのための処理を実行する。
【0025】
まず、上流ビーム位置モニタ制御装置11は上流ビーム位置モニタ装置6の検出信号を信号処理し(ステップS120)、照射ノズル装置5への入射ビームのビーム位置とビーム幅を演算する(ステップS130)。ビーム位置としては上流ビーム位置モニタ装置6の検出信号の分布の重心位置(ガウス分布のピークの位置)を計算する(後述)。上流ビーム位置モニタ制御装置11は、演算したビーム位置とビーム幅と、統括制御装置3によりあらかじめ設定された目標のビーム位置(ビーム重心位置)とビーム幅から、計算値と設定値との差分が許容範囲内で一致しているかを判定処理し、許容値を逸脱する場合は、アラームないし照射を停止するインターロック信号15を照射制御装置4から統括制御装置3に出力する(ステップS140)。統括制御装置3はそのインターロック信号を入力すると、直ちに荷電粒子ビーム発生装置1を停止させる(ステップS150)。
【0026】
上流ビーム位置モニタ装置6における目標値は変化せず固定である。すなわち、上流ビーム位置モニタ装置6は、照射ノズル装置5に入射する荷電粒子ビームのビーム位置(ビーム重心位置)がビーム中心軸Bにあるかどうかを検知する。この上流ビーム位置モニタ装置6の位置においてビーム位置がビーム中心軸Bからずれている場合は、下流では大きくずれてしまう。このため上流ビーム位置モニタ装置6及び上流ビーム位置モニタ制御装置11によるビーム監視は重要な役割を果たす。
【0027】
下流ビーム位置モニタ制御装置12は下流ビーム位置モニタ装置10の検出信号を信号処理し(ステップS120)、走査電磁石7及び走査電磁石8によって走査されたビーム位置とビーム幅とを演算する(ステップS130)。下流ビーム位置モニタ制御装置12は、演算したビーム位置(ビーム重心位置)とビーム幅と、統括制御装置3によりあらかじめ設定された目標のビーム位置(ビーム重心位置)とビーム幅から、計算値と設定値のとの差分が許容範囲内で一致しているかを判定処理し、許容値を逸脱する場合は、アラームないし照射を停止するインターロック信号15を照射制御装置4から統括制御装置3に出力する(ステップS140)。統括制御装置3はそのインターロック信号を入力すると、直ちに荷電粒子ビーム発生装置1を停止させる(ステップS150)。
【0028】
下流ビーム位置モニタ装置10の位置においてビーム位置とビーム幅を監視することは照射対象における照射ビーム精度監視の役割を果たす。
【0029】
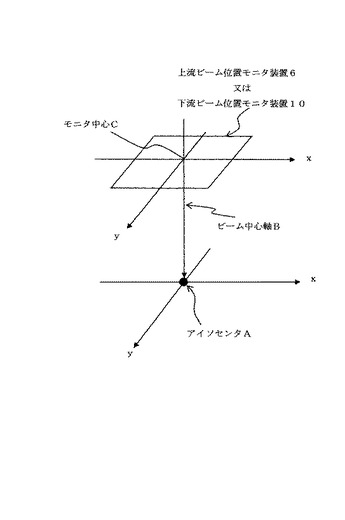
図4はビーム中心軸の概念及びビーム中心軸と上流ビーム位置モニタ装置6及び下流ビーム位置モニタ装置10との位置関係を示す図である。
【0030】
照射ノズル装置5に入射した荷電粒子ビームを走査電磁石7,8にて走査しない場合、ビームはアイソセンタ(照射中心)Aを通過する。アイソセンタとは、回転ガントリ、照射対象13(患者)の支持台(治療台)、照射ノズル装置5等の機器を配置する場合の原点であり、回転ガントリの回転中心軸上に位置している。照射対象13は患部がアイソセンタAに位置するように支持台に位置決めされる。ビーム輸送系の電磁石は、照射ノズル装置5に入射した荷電粒子ビームを走査電磁石7,8にて走査しない場合に、ビームがアイソセンタAを通過するように調整されており、アイソセンタAを通過するビーム経路Bをビーム中心軸と呼ぶ。上流ビーム位置モニタ装置6は、モニタ面の中心Cがビーム中心軸B上に位置するように(照射ノズル装置5に入射した荷電粒子ビームを走査電磁石7,8にて走査しない場合に、ビームがモニタ面の中心Cを通るように)設置されている。
【0031】
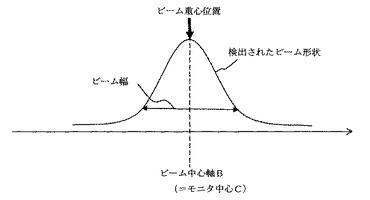
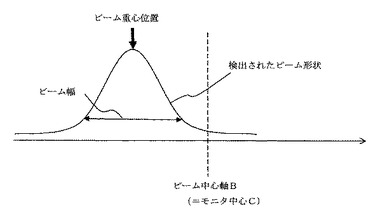
図5Aは上流ビーム位置モニタ装置6の検出信号の分布形状を示す図であり、図5Bは下流ビーム位置モニタ装置10の検出信号の分布形状を示す図である。
【0032】
上流ビーム位置モニタ制御装置11及び下流ビーム位置モニタ制御装置12は、いずれも、位置モニタ装置6,10からの検出信号の分布形状(ガウス分布)をビーム形状として求め、このビーム形状からビーム重心位置を計算する。上流ビーム位置モニタ装置6の設置位置では走査電磁石7,8でビームを走査していないため、ビーム重心位置がビーム中心軸Bに一致させる必要がある。そのため、ビーム重心位置とビーム中心軸Bとの偏差からトレランス判定を行う。一方、下流ビーム位置の見た装置10の設置位置では、走査電磁石7,8で走査されたビームになるため、ビーム中心軸Bから離れた位置にビーム重心位置が計算される。また、走査電磁石7,8に通電する電流値から予定しているビーム計画位置が求められ、このビーム重心位置と計画位置との差分からトレランス判定を行う。
【0033】
次に、本実施の形態の特徴である上流ビーム位置モニタ装置6の詳細を説明する。
【0034】
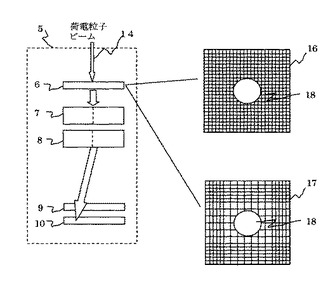
図6は上流ビーム位置モニタ装置6の構成を従来のものと比較して示す図である。
【0035】
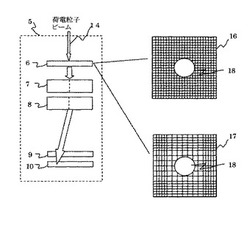
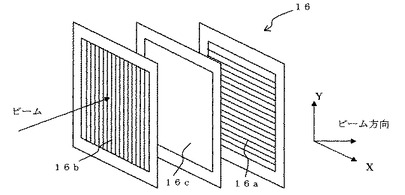
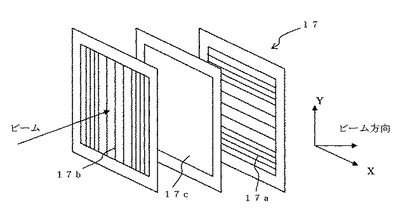
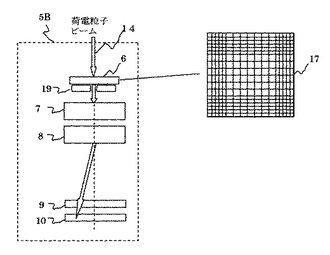
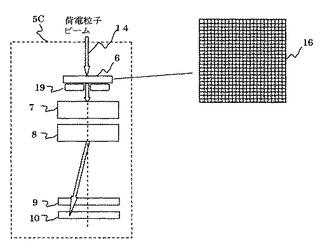
図6において、従来の上流ビーム位置モニタ装置に用いられるタイプAのビーム位置モニタ16が右上側に示され、本実施の形態における上流ビーム位置モニタ装置6に用いられるタイプBのビーム位置モニタ17が右下側に示されている。タイプAのビーム位置モニタ16及びタイプBのビーム位置モニタ17は、いずれも、直交する二方向(X方向及びY方向)に張り渡されかつそれぞれの方向において平行に配置された複数の電極線を有するマルチワイヤ型ビームプロファイルモニタである。ただし、タイプAのビーム位置モニタ16は、直交する二方向のそれぞれにおいて平行に張り渡された複数の電極線は全体的に等間隔に配置されている。これに対し、タイプBのビーム位置モニタ17は、直交する二方向にに張り渡されかつそれぞれの方向において平行に配置された複数の電極線は、荷電粒子ビームが通過する中央部分の電極線の配置間隔が周辺部分よりも広くなっている。中央部分は荷電粒子ビーム径18を含む大きさとする必要があり、好ましくは荷電粒子ビーム径18よりも僅かに大きい大きさである。
【0036】
図7及び図8は、それぞれ、従来の上流ビーム位置モニタ装置に使用するAタイプのビーム位置モニタ装置16と本実施の形態における上流ビーム位置モニタ装置6に使用するBタイプのビーム位置モニタ17の構造を示す図である。
【0037】
図7において、Aタイプのビーム位置モニタ16は、X方向(図示上下方向)に張り渡され、X方向位置を検出する複数の電極線(以下X方向電極線という)16aと、Y方向(X方向に直交する左右方向)に張り渡され、Y方向位置を検出する複数の電極線(以下Y方向電極線という)16bと、X方向電極線16aとY方向電極線16b間に配置された高圧電極板16cとでマルチワイヤイオンチェンバーを構成している。X方向電極線16a及びY方向電極線16bは、それぞれ、複数のタングステンワイヤを所定のピッチで等間隔に張ったものであり、それぞれ高圧電極板16cとの間に電場を発生させる。
【0038】
このように構成されたイオンチェンバーを荷電粒子ビームが通過するとき、高圧電極板16cとX方向電極線16a及びY方向電極16b間の気体が電離し、イオンペアが生成される。生成されたイオンペアは、電場によって、X方向電極線16a及びY方向電極線16bに移動し、それぞれの電極線(ワイヤ)により回収される。従って、各電極線の検出電荷量を計測することにより、荷電粒子ビームのプロファイルを測定することができる。また、各電極線の検出電荷量を演算処理することにより、荷電粒子ビームの重心位置及びビーム幅を算出できる。
【0039】
図8において、Bタイプのビーム位置モニタ17も、同様に、複数のX方向電極線17aと、複数のY方向電極線17bと、高圧電極板17cとでマルチワイヤイオンチェンバーを構成している。複数のX方向電極線17a及び複数のY方向電極線17bは、それぞれ、複数のタングステンワイヤを張ったものである。ただし、複数のX方向電極線17aと複数のY方向電極線17bは、それぞれ、マルチワイヤイオンチェンバー(モニタ面)の中央部分と周辺部分とで配置間隔が異なり、荷電粒子ビームが通過する中央部分の電極線17a,17bの配置間隔が周辺部分よりも広くなっている。
【0040】
このように電極線の配置間隔を異ならせた場合でも、Aタイプのビーム位置モニタ16と同様に各ワイヤの検出電荷量を計測することで荷電粒子ビームのプロファイルを測定することができる。また、各ワイヤの検出電荷量を演算処理することにより、荷電粒子ビームの重心位置(ビーム位置)及びビーム幅を算出できる。
【0041】
荷電粒子ビームの重心位置(ビーム位置)及びビーム幅は、Aタイプのビーム位置モニタ16及びBタイプのビーム位置モニタ17のいずれも、上流ビーム位置モニタ制御装置11において以下の計算式を用いることにより算出される。
【0042】
<重心位置:Centの計算式>
【0043】
【数1】

【0044】
ただし、ワイヤ数:n
ワイヤの設置位置:Xi(i=1〜n)
ワイヤからの検出信号:Ai(i=1〜n)
<幅:Width(片側1σ)の計算式>
【0045】
【数2】
【0046】
なお、上記計算式とは別に、ガウスフィッティング等を使用しても荷電粒子ビームの重心位置及びビーム幅を計算することができる。
【0047】
次に、本実施の形態の効果を説明する。
【0048】
従来の上流ビーム位置モニタ装置に用いられるAタイプのビーム位置モニタ16は、X方向電極線16a及びY方向電極線16b(タングステンワイヤ)を、それぞれ、所定のピッチで等間隔に張ったものである。このため、ビーム位置モニタ16を通過した荷電粒子ビームは多数のタングステンワイヤに当たって散乱し、ビーム位置モニタ16を通過した後の荷電粒子ビームの直径は拡大する。その結果、照射線量分布精度の低下、特に照射対象との境界部分において照射線量分布が悪くなる。
【0049】
上流ビーム位置モニタ装置を設置しない場合は、入射するビームの通過位置がビーム中心軸Bにあるかどうかを計測することができず、目標とする照射位置を荷電粒子ビームが通過しているかどうかを監視することができないため、誤った位置への照射を行っても荷電粒子ビームを停止させることができなくなる。
【0050】
これに対し、本実施の形態では、上流ビーム位置モニタ装置の場合は、荷電粒子ビームはビーム位置モニタの中央部分(モニタ面中央部分)を通過することに着目し、荷電粒子ビームが通過する中央部分の電極線の配置間隔を周辺部分よりも広くしたBタイプのビーム位置モニタ17を用いるものであり、これにより荷電粒子ビームがビーム位置モニタ17を通過するとき、荷電粒子ビームが当たるタングステンワイヤの本数が減るため、荷電粒子ビームの散乱が抑えられ、細いビームまま照射対象13に照射が可能となる。その結果、特に、照射部位の境界部分の照射線量分布の精度を高くすることができ、さらに、ビーム位置モニタ17の検出信号を用いて入射ビームの位置監視することで、安全なビーム照射を行うことができる。
【実施例2】
【0051】
図9は本発明の第2の実施の形態における荷電粒子線照射システムの全体構成を示す図である。
【0052】
図9において、照射ノズル装置5Aに備えられる上流ビーム位置モニタ装置6Aは、上述した従来のタイプAのビーム位置モニタ16と本発明のタイプBのビーム位置モニタ17の両方を備え、それらを駆動式とし、タイプAのビーム位置モニタ16(第1ビーム位置モニタ)とタイプBのビーム位置モニタ17(第2ビーム位置モニタ)を選択的に使用できるようにしたものである。
【0053】
図10は上流ビーム位置モニタ装置6Aの構成の一例を示す図である。
【0054】
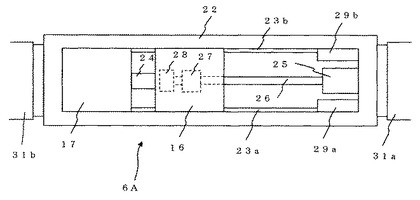
上流ビーム位置モニタ装置6Aは矩形の開口部21を有する矩形の支持フレーム22を備え、支持フレーム22の開口部21の長手方向内側部分にガイドプレート23a,23bが設けられ、このガイドプレート23a,23b上にタイプAのビーム位置モニタ16とタイプBのビーム位置モニタ装置17が連結部材24によって連結された状態で移動可能に載置されている。支持フレーム22の開口部21における一方の短手方向内側部分には電動モータ25が取り付けられ、電動モータ25にネジ軸26が連結され、ネジ軸26はタイプAのビーム位置モニタ16の下部に取り付けられたボールネジ式のナット27に貫入され、かつナット27から突出した側の端部がブラケット28によって回転自在に支持されている。支持フレーム22の開口部21の長手方向内側部分における電動モータ近傍にはビーム位置モニタ16,17の移動端を画定するためのストッパ29a,29bが設けられている。支持フレーム22の両端は支持ビーム31a,31bを介して照射ノズル装置5Aの本体(ケース)に取り付けられている。電動モータ25とネジ軸26及びナット27はAタイプのビーム位置モニタ16とBタイプのビーム位置モニタ17を選択的に荷電粒子ビームの通過位置にセットするモニタ駆動装置を構成する。電動モータ25を正方向に駆動するとビーム位置モニタ16,17が図示左方向に移動し、ビーム位置モニタ17が支持フレーム22の図示左側の短手方向内側部分に当たってビーム位置モニタ16がビームライン上にセットされる。電動モータ25を逆方向に駆動するとビーム位置モニタ16,17が図示右方向に移動し、ビーム位置モニタ16がストッパ29a,29bに当たってビーム位置モニタ17がビームライン上にセットされる。
【0055】
患者治療を行う前には、照射ノズル装置5に入射する荷電粒子ビームがビーム中心軸Bを通過するように輸送系電磁石を調整することが必要となる。この輸送系電磁石の調整時には、照射ノズル装置5に入射するビーム位置精度を高くする必要がある。そのためには、従来のAタイプのビーム位置モニタ16のように中央部分の電極線間が狭いモニタにより調整する必要がある。一方、患者治療時においては第1の実施の形態で説明したように、ビームの散乱を抑えられるBタイプのビーム位置モニタ17を使用し、照射線量分布精度を高くする必要がある。
【0056】
本実施の形態においては、タイプAのビーム位置モニタ16とタイプBのビーム位置モニタ17を駆動式として選択的に荷電粒子ビームの通過位置にセットできるようにしたため、輸送系電磁石の調整時にはタイプAのビーム位置モニタ16をビームライン上にセットして、照射ノズル装置5に入射するビーム位置精度を高くすることができ、患者治療時にはタイプBのビーム位置モニタ17をビームライン上にセットして、ビームの散乱を抑え照射線量分布精度を高くすることができる。
【実施例3】
【0057】
図11は、本発明の第3の実施の形態における荷電粒子線照射システムの全体構成を示す図である。
【0058】
図11において、本実施の形態は、荷電粒子ビーム径(幅)をさらに小さくするため、照射ノズル装置5Bに備えられる上流ビーム位置モニタ装置6の下流側に上流ビーム位置モニタ装置6に近接してビーム遮断治具(ビーム遮断装置)19を設置し、上流ビーム位置モニタ装置6で散乱された余計なビームを遮断するようにしたものである。ビーム遮断治具19は中央部に開口を有し、この開口以外の部分でビームを遮断する。上流ビーム位置モニタ装置6としては、第1の実施の形態と同様、タイプBのビーム位置モニタ17が使用される。これによりタイプBのビーム位置モニタ17を通過するときに散乱した余計なビームを遮断し、さらに細いビームを照射対象に照射することができ、照射線量分布精度をさらに高くすることができる。また、開口の大きさ(直径)が異なる複数のビーム遮断治具19を用意し、これらを交換して使用することでビーム遮断径の大きさ(したがって照射されるビーム径)を任意に調整することができる。
【0059】
図12は、照射ノズル装置5Cに備えられる上流ビーム位置モニタ装置6として、従来のタイプAのビーム位置モニタ16を使用した場合のものである。これによってもビーム位置モニタ16を通過して散乱した余計なビームを遮断してビーム径を細くし、照射線量分布精度を高くすることができる。なお、図示はしないが、第2の実施の形態のタイプAのビーム位置モニタ16とタイプBのビーム位置モニタ17を選択的にビームの通過位置にセットする上流ビーム位置モニタ装置6Aの下流側に同様にビーム遮断治具19を設置してもよい。
【0060】
なお、以上の実施の形態では、ビームの照射位置移動時にビーム照射を停止し、照射時にビーム移動を停止するスポットスキャニング法を行うものとしたが、入射した荷電粒子ビームが細いビームのまま照射されることが望まれる照射法であれば、それ以外の照射法(例えば、ラスター走査法、ウォブラー法等それ以外のスキャニング照射方式)を行うものであってもよい。
【図面の簡単な説明】
【0061】
【図1】本発明の第1の実施の形態における荷電粒子線照射システムの全体構成を示す図である。
【図2】ビーム位置モニタ監視システムの機能を示すブロック図である。
【図3】ビーム位置モニタ監視システムの機能を示すフローチャートである。
【図4】ビーム中心軸の概念及びビーム中心軸と上流ビーム位置モニタ装置及び下流ビーム位置モニタ装置との位置関係を示す図である。
【図5A】上流ビーム位置モニタ装置の検出信号の分布形状を示す図である。
【図5B】下流ビーム位置モニタ装置の検出信号の分布形状を示す図である。
【図6】上流ビーム位置モニタ装置の構成の概念を従来のものと比較して示す図である。
【図7】従来のAタイプのビーム位置モニタの構造を示す図である。
【図8】本実施の形態におけるBタイプのビーム位置モニタの構造を示す図である。
【図9】本発明の第2の実施の形態における荷電粒子線照射システムの全体構成を示す図である。
【図10】第2の実施の形態における上流位置モニタ装置の構成の一例を示す図である。
【図11】本発明の第3の実施の形態における荷電粒子線照射システムの全体構成を示す図である。
【図12】本発明の第3の実施の形態の変形例として、上流ビーム位置モニタ装置に従来のタイプAのビーム位置モニタを使用した場合の構成を示す図である。
【符号の説明】
【0062】
1 荷電粒子発生装置
1a 前段加速器
1b シンクロトロン
1c ビーム輸送系
2 加速器制御装置
3 統括制御装置
4 照射制御装置
5 照射ノズル装置
6 上流ビーム位置モニタ装置
7 走査電磁石(Y軸方向)
8 走査電磁石(X軸方向)
9 線量モニタ
10 下流ビーム位置モニタ装置
11 上流ビーム位置モニタ制御装置
12 下流ビーム位置モニタ制御装置
13 照射対象(がん患部)
14 荷電粒子ビーム
15 インターロック信号
16 ビーム位置モニタ(タイプA)(第1ビーム位置モニタ)
16a X方向電極線
16b Y方向電極線
16c 高圧電極板
17 ビーム位置モニタ(タイプB)(第2ビーム位置モニタ)
17a X方向電極線
17b Y方向電極線
17c 高圧電極板
18 荷電粒子ビーム径
19 ビーム遮断治具
21 開口
22 支持フレーム
23a,23b ガイドプレート
24 連結部材
25 電動モータ
26 ネジ軸
27 ナット
28ブラケット
29a,29b ストッパ
A アイソセンタ
B ビーム中心軸
C モニタ中心
【技術分野】
【0001】
本発明は荷電粒子線照射システム及び照射ノズル装置に係わり、特に走査電磁石装置によりスキャニング照射を実施する際に、荷電粒子ビームの照射位置を検知するためのビーム位置モニタ装置を備えた荷電粒子線照射システム及び照射ノズル装置に関する。
【背景技術】
【0002】
荷電粒子ビームを利用したがん治療は、がん患部にエネルギーを集中させることができるため、がん患部以外の正常組織への影響を低減でことができ、患者への負担が少ないがん治療法として注目を集めている。
【0003】
加速器などで生成した荷電粒子線をがん患部へ照射する方式として細い荷電粒子ビームを走査してがん患部へ照射するスキャニング照射方式と、荷電粒子ビームを散乱体で散乱させ、散乱されたビームをコリメータでがん患部の形状に合わせて照射するパッシブ照射方式の2つの方式がある。
【0004】
上記2つの方式のうち前者の細いビームを走査して照射するスキャニング照射方式には、ビームをジグザグ状或いはテレビの走査線のように横方向(X方向)及び縦方向(Y方向)に連続的に走査するラスター走査法(例えば、非特許文献1のp.2088,FIG46)、ビームの照射位置移動時にビーム照射を停止し、ビーム照射時にビームの移動を停止するスポットスキャニング法(特許文献1)、ビームを円形に走査するウォブラー法(例えば、非特許文献1のp.2084-2086,FIG41)等がある。
【0005】
これらスキャニング照射方式においては、ビームを走査する走査電磁石より上流のビーム通過位置が中心(ビーム軸)を通過する必要があり、このビーム位置を検出するために走査電磁石の上流に上流ビーム位置モニタ装置を設置し、照射位置精度の監視を行っている(特許文献2)。上流ビーム位置モニタ装置には電極線を直交する二方向に、それぞれ平行に張り渡したマルチワイヤ型ビームプロファイルモニタが用いられる(特許文献3)。電極線はタングステンワイヤである。
【0006】
【非特許文献1】Rev.Sci.Instrum.,Vol.64,No.8,August,1993
【特許文献1】特許第2833602号公報
【特許文献2】特開2005−296162号公報
【特許文献3】特開2001−236909号公報
【発明の開示】
【発明が解決しようとする課題】
【0007】
スキャニング照射方式では、照射対象物の照射境界の線量分布形状を精度よく照射するためには、照射する荷電粒子ビームの直径が小さい(ビームが細い)方が、精度よく線量分布を形成できる。しかし、ビームを走査する走査電磁石の上流には上流ビーム位置モニタ装置が設置されている。上流ビーム位置モニタ装置は電極線としてタングステンワイヤを張り渡したマルチワイヤ型ビームプロファイルモニタで構成されている。このため照射ノズル装置に入射し、上流ビーム位置モニタ装置を通過した荷電粒子ビームはタングステンワイヤに当たって散乱し、上流位置モニタ装置通過後の荷電粒子ビームの直径は通過前よりも拡大する。その結果、照射線量分布精度の低下、特に照射対象との境界部分において照射線量分布が悪くなる。
【0008】
上流ビーム位置モニタ装置を設置しない場合は、照射ノズル装置に入射するビームの通過位置が中心(ビーム軸)にあるかどうかを計測できず、目標とする照射位置を荷電粒子ビームが通過しているかどうかを監視することができないため、誤った位置への照射を行っても荷電粒子ビームを停止させることができなくなる。
【0009】
本発明の目的は、入射ビーム位置を監視することができ、かつ荷電粒子ビーム径を拡大することなく、細いビームのまま照射することができる荷電粒子線照射システム及び照射ノズル装置を提供することである。
【課題を解決するための手段】
【0010】
本発明は、上記目的を達成するために、上流ビーム位置モニタ装置の荷電粒子ビームが通過する中央部分の電極線の配置間隔を周辺部分よりも広くしたものである。
【0011】
これにより荷電粒子ビームが上流ビーム位置モニタ装置を通過するとき、荷電粒子ビームが当たるタングステンワイヤの本数が減るため、荷電粒子ビームの散乱が抑えられ、細いビームまま照射対象に照射が可能となる。その結果、特に、照射部位の境界部分の照射線量分布の精度を高くすることができる。また、上流ビーム位置モニタ装置が設置されているため、ビーム位置を検知することができ、入射ビームの位置を監視しながら、安全なビーム照射を行うことができる。
【発明の効果】
【0012】
本発明によれば、上流ビーム位置モニタ装置を通過するビームの散乱を抑え、細いビームのまま照射することができ、特に、照射境界部分の照射線量精度が高くすることができる。
【0013】
また、照射ノズル装置への入射ビーム位置を検知できるため、ビーム位置を監視しながら、安全なビーム照射を行うことができる。
【発明を実施するための最良の形態】
【0014】
以下、本発明の実施の形態を図面を参照しつつ説明する。
【実施例1】
【0015】
図1は本発明の第1の実施の形態における荷電粒子線照射システムの全体構成を示す図である。
【0016】
図1において、本実施の形態の荷電粒子線照射システムは荷電粒子ビーム発生装置1及び照射ノズル装置5を有している。
【0017】
荷電粒子ビーム発生装置1は、イオン源(図示せず)、前段加速器(例えば直線加速器)1a及びシンクロトロン1bを有し、イオン源で発生したイオン(例えば、陽子イオン(または炭素イオン)等の荷電粒子ビーム)は前段加速器1aで加速され、前段加速器1aからシンクロトロン1bに入射される。この荷電粒子ビームは、シンクロトロン1bで加速され、設定されたエネルギーまでに高められた後、出射される。シンクロトロン1bから出射された荷電粒子ビームはビーム輸送系1cを経て回転ガントリ(図示せず)内のビーム輸送系を経由して、回転ガントリに設けられた照射ノズル装置5へと輸送される。
【0018】
照射ノズル装置5は、上流ビーム位置モニタ装置6、Y軸方向の1対の走査電磁石7、X軸方向の1対の走査電磁石8、線量モニタ9、下流ビーム位置モニタ装置10を有している。照射ノズル装置5に輸送された荷電粒子ビームは照射ノズル装置5内の上流ビーム位置モニタ装置6を通過した後、走査電磁石7によりY軸方向に偏向され、走査電磁石8によりX軸方向にビームが偏向される。偏向されたビームは線量モニタ9及び下流ビーム位置モニタ装置10を通過し、照射対象13のがん患部の所定位置に照射される。ビームの照射中はビームの移動を停止し、停止した照射位置で線量モニタ9により照射線量値が計測される。照射線量値が所定の線量に達すると、ビーム照射(シンクロトロン1bからのビーム出射)を停止し、走査電磁石(Y軸)7及び走査電磁石(X軸)8の励磁電流を変更した後、再びビーム照射(シンクロトロン1bからのビーム出射)を開始し、次の照射位置にて再び線量モニタ9により照射線量値が計測される。このことを繰り返し、照射対象13の全体を照射する。
【0019】
本実施の形態の荷電粒子線治療システムは、またその制御系として、加速器制御装置2、統括制御装置3、照射制御装置4、上流ビーム位置モニタ制御装置11及び下流ビーム位置モニタ制御装置12を有している。
【0020】
統括制御装置3は、患者の処方箋データ(治療計画データ)をもとに加速器制御装置2と照射制御装置4に照射条件を設定する。加速器制御装置2は設定した照射条件に基づいてシンクロトロン1bを制御し、シンクロトロン1bを周回する荷電粒子ビームを設定したエネルギーまで加速するとともに、荷電粒子ビームの加速後、照射制御装置4で決定しビーム照射の停止・開始タイミング等の情報とに基づいてシンクロトロン1bからの荷電粒子ビームの出射開始及び停止を制御する。照射制御装置4は設定した照射条件(治療計画に基づく照射位置及びエネルギー)に基づいて走査電磁石7,8の励磁電流を計算し、電源(図示せず)に出力指令を送信することで、所定パターンの励磁電流を走査電磁石7,8に流し、荷電粒子ビームの照射位置を制御する。これと同時に、加速器制御装置2にビーム照射の開始タイミング指令を送信し、シンクロトロン1bから荷電粒子ビームを出射させる。また、照射制御装置4は線量モニタ9の検出信号により照射線量値を計測し、照射線量値が所定の線量に達すると、加速器制御装置2にビーム照射の停止タイミング指令を送信し、シンクロトロン1bからの荷電粒子ビームの出射を停止させる。
【0021】
上流ビーム位置モニタ制御装置11及び下流ビーム位置モニタ制御装置12は、それぞれ、荷電粒子ビームが所定のビーム幅で所定のビーム位置に照射されていることを監視し、異常が検知されると照射制御装置4から統括制御装置3にインターロック信号を出力する。統括制御装置3はそのインターロック信号を入力すると、直ちに荷電粒子ビーム発生装置1を停止させる。上流ビーム位置モニタ装置6及び下流ビーム位置モニタ装置10と照射制御装置4、上流ビーム位置モニタ制御装置11及び下流ビーム位置モニタ制御装置12はビーム位置モニタシステムを構成する。
【0022】
図2はビーム位置モニタシステムの機能を示すブロック図であり、図3はその機能を示すフローチャートである。
【0023】
照射制御装置4は設定した照射条件(治療計画に基づく照射位置及びエネルギー)に基づいて走査電磁石7,8の励磁電流を計算し、所定パターンの励磁電流を走査電磁石7,8に流し、荷電粒子ビームの照射位置を制御する。照射制御装置4は、これと同時に、加速器制御装置2にビーム照射の開始タイミング指令を送信し、シンクロトロン1bから荷電粒子ビームを出射させる(ステップS100)。出射された荷電粒子ビームは走査電磁石7,8により制御された照射位置に照射される。照射制御装置4は線量モニタ9の検出信号により照射線量値を計測し、照射位置での照射線量値が所定の線量に達すると、加速器制御装置2にビーム照射の停止タイミング指令を送信し、シンクロトロン1bからの荷電粒子ビームの出射を停止させる(ステップS110)。これにより設定された照射位置での荷電粒子ビームの照射が完了する。
【0024】
このように走査電磁石7,8によって制御された1つの照射位置でのビーム照射が完了すると、上流ビーム位置モニタ制御装置11及び下流ビーム位置モニタ制御装置12は、その間に上流ビーム位置モニタ装置6及び下流ビーム位置モニタ装置10によって検出した電荷量(検出信号)に基づいてビーム照射の健全性チェックのための処理を実行する。
【0025】
まず、上流ビーム位置モニタ制御装置11は上流ビーム位置モニタ装置6の検出信号を信号処理し(ステップS120)、照射ノズル装置5への入射ビームのビーム位置とビーム幅を演算する(ステップS130)。ビーム位置としては上流ビーム位置モニタ装置6の検出信号の分布の重心位置(ガウス分布のピークの位置)を計算する(後述)。上流ビーム位置モニタ制御装置11は、演算したビーム位置とビーム幅と、統括制御装置3によりあらかじめ設定された目標のビーム位置(ビーム重心位置)とビーム幅から、計算値と設定値との差分が許容範囲内で一致しているかを判定処理し、許容値を逸脱する場合は、アラームないし照射を停止するインターロック信号15を照射制御装置4から統括制御装置3に出力する(ステップS140)。統括制御装置3はそのインターロック信号を入力すると、直ちに荷電粒子ビーム発生装置1を停止させる(ステップS150)。
【0026】
上流ビーム位置モニタ装置6における目標値は変化せず固定である。すなわち、上流ビーム位置モニタ装置6は、照射ノズル装置5に入射する荷電粒子ビームのビーム位置(ビーム重心位置)がビーム中心軸Bにあるかどうかを検知する。この上流ビーム位置モニタ装置6の位置においてビーム位置がビーム中心軸Bからずれている場合は、下流では大きくずれてしまう。このため上流ビーム位置モニタ装置6及び上流ビーム位置モニタ制御装置11によるビーム監視は重要な役割を果たす。
【0027】
下流ビーム位置モニタ制御装置12は下流ビーム位置モニタ装置10の検出信号を信号処理し(ステップS120)、走査電磁石7及び走査電磁石8によって走査されたビーム位置とビーム幅とを演算する(ステップS130)。下流ビーム位置モニタ制御装置12は、演算したビーム位置(ビーム重心位置)とビーム幅と、統括制御装置3によりあらかじめ設定された目標のビーム位置(ビーム重心位置)とビーム幅から、計算値と設定値のとの差分が許容範囲内で一致しているかを判定処理し、許容値を逸脱する場合は、アラームないし照射を停止するインターロック信号15を照射制御装置4から統括制御装置3に出力する(ステップS140)。統括制御装置3はそのインターロック信号を入力すると、直ちに荷電粒子ビーム発生装置1を停止させる(ステップS150)。
【0028】
下流ビーム位置モニタ装置10の位置においてビーム位置とビーム幅を監視することは照射対象における照射ビーム精度監視の役割を果たす。
【0029】
図4はビーム中心軸の概念及びビーム中心軸と上流ビーム位置モニタ装置6及び下流ビーム位置モニタ装置10との位置関係を示す図である。
【0030】
照射ノズル装置5に入射した荷電粒子ビームを走査電磁石7,8にて走査しない場合、ビームはアイソセンタ(照射中心)Aを通過する。アイソセンタとは、回転ガントリ、照射対象13(患者)の支持台(治療台)、照射ノズル装置5等の機器を配置する場合の原点であり、回転ガントリの回転中心軸上に位置している。照射対象13は患部がアイソセンタAに位置するように支持台に位置決めされる。ビーム輸送系の電磁石は、照射ノズル装置5に入射した荷電粒子ビームを走査電磁石7,8にて走査しない場合に、ビームがアイソセンタAを通過するように調整されており、アイソセンタAを通過するビーム経路Bをビーム中心軸と呼ぶ。上流ビーム位置モニタ装置6は、モニタ面の中心Cがビーム中心軸B上に位置するように(照射ノズル装置5に入射した荷電粒子ビームを走査電磁石7,8にて走査しない場合に、ビームがモニタ面の中心Cを通るように)設置されている。
【0031】
図5Aは上流ビーム位置モニタ装置6の検出信号の分布形状を示す図であり、図5Bは下流ビーム位置モニタ装置10の検出信号の分布形状を示す図である。
【0032】
上流ビーム位置モニタ制御装置11及び下流ビーム位置モニタ制御装置12は、いずれも、位置モニタ装置6,10からの検出信号の分布形状(ガウス分布)をビーム形状として求め、このビーム形状からビーム重心位置を計算する。上流ビーム位置モニタ装置6の設置位置では走査電磁石7,8でビームを走査していないため、ビーム重心位置がビーム中心軸Bに一致させる必要がある。そのため、ビーム重心位置とビーム中心軸Bとの偏差からトレランス判定を行う。一方、下流ビーム位置の見た装置10の設置位置では、走査電磁石7,8で走査されたビームになるため、ビーム中心軸Bから離れた位置にビーム重心位置が計算される。また、走査電磁石7,8に通電する電流値から予定しているビーム計画位置が求められ、このビーム重心位置と計画位置との差分からトレランス判定を行う。
【0033】
次に、本実施の形態の特徴である上流ビーム位置モニタ装置6の詳細を説明する。
【0034】
図6は上流ビーム位置モニタ装置6の構成を従来のものと比較して示す図である。
【0035】
図6において、従来の上流ビーム位置モニタ装置に用いられるタイプAのビーム位置モニタ16が右上側に示され、本実施の形態における上流ビーム位置モニタ装置6に用いられるタイプBのビーム位置モニタ17が右下側に示されている。タイプAのビーム位置モニタ16及びタイプBのビーム位置モニタ17は、いずれも、直交する二方向(X方向及びY方向)に張り渡されかつそれぞれの方向において平行に配置された複数の電極線を有するマルチワイヤ型ビームプロファイルモニタである。ただし、タイプAのビーム位置モニタ16は、直交する二方向のそれぞれにおいて平行に張り渡された複数の電極線は全体的に等間隔に配置されている。これに対し、タイプBのビーム位置モニタ17は、直交する二方向にに張り渡されかつそれぞれの方向において平行に配置された複数の電極線は、荷電粒子ビームが通過する中央部分の電極線の配置間隔が周辺部分よりも広くなっている。中央部分は荷電粒子ビーム径18を含む大きさとする必要があり、好ましくは荷電粒子ビーム径18よりも僅かに大きい大きさである。
【0036】
図7及び図8は、それぞれ、従来の上流ビーム位置モニタ装置に使用するAタイプのビーム位置モニタ装置16と本実施の形態における上流ビーム位置モニタ装置6に使用するBタイプのビーム位置モニタ17の構造を示す図である。
【0037】
図7において、Aタイプのビーム位置モニタ16は、X方向(図示上下方向)に張り渡され、X方向位置を検出する複数の電極線(以下X方向電極線という)16aと、Y方向(X方向に直交する左右方向)に張り渡され、Y方向位置を検出する複数の電極線(以下Y方向電極線という)16bと、X方向電極線16aとY方向電極線16b間に配置された高圧電極板16cとでマルチワイヤイオンチェンバーを構成している。X方向電極線16a及びY方向電極線16bは、それぞれ、複数のタングステンワイヤを所定のピッチで等間隔に張ったものであり、それぞれ高圧電極板16cとの間に電場を発生させる。
【0038】
このように構成されたイオンチェンバーを荷電粒子ビームが通過するとき、高圧電極板16cとX方向電極線16a及びY方向電極16b間の気体が電離し、イオンペアが生成される。生成されたイオンペアは、電場によって、X方向電極線16a及びY方向電極線16bに移動し、それぞれの電極線(ワイヤ)により回収される。従って、各電極線の検出電荷量を計測することにより、荷電粒子ビームのプロファイルを測定することができる。また、各電極線の検出電荷量を演算処理することにより、荷電粒子ビームの重心位置及びビーム幅を算出できる。
【0039】
図8において、Bタイプのビーム位置モニタ17も、同様に、複数のX方向電極線17aと、複数のY方向電極線17bと、高圧電極板17cとでマルチワイヤイオンチェンバーを構成している。複数のX方向電極線17a及び複数のY方向電極線17bは、それぞれ、複数のタングステンワイヤを張ったものである。ただし、複数のX方向電極線17aと複数のY方向電極線17bは、それぞれ、マルチワイヤイオンチェンバー(モニタ面)の中央部分と周辺部分とで配置間隔が異なり、荷電粒子ビームが通過する中央部分の電極線17a,17bの配置間隔が周辺部分よりも広くなっている。
【0040】
このように電極線の配置間隔を異ならせた場合でも、Aタイプのビーム位置モニタ16と同様に各ワイヤの検出電荷量を計測することで荷電粒子ビームのプロファイルを測定することができる。また、各ワイヤの検出電荷量を演算処理することにより、荷電粒子ビームの重心位置(ビーム位置)及びビーム幅を算出できる。
【0041】
荷電粒子ビームの重心位置(ビーム位置)及びビーム幅は、Aタイプのビーム位置モニタ16及びBタイプのビーム位置モニタ17のいずれも、上流ビーム位置モニタ制御装置11において以下の計算式を用いることにより算出される。
【0042】
<重心位置:Centの計算式>
【0043】
【数1】
【0044】
ただし、ワイヤ数:n
ワイヤの設置位置:Xi(i=1〜n)
ワイヤからの検出信号:Ai(i=1〜n)
<幅:Width(片側1σ)の計算式>
【0045】
【数2】
【0046】
なお、上記計算式とは別に、ガウスフィッティング等を使用しても荷電粒子ビームの重心位置及びビーム幅を計算することができる。
【0047】
次に、本実施の形態の効果を説明する。
【0048】
従来の上流ビーム位置モニタ装置に用いられるAタイプのビーム位置モニタ16は、X方向電極線16a及びY方向電極線16b(タングステンワイヤ)を、それぞれ、所定のピッチで等間隔に張ったものである。このため、ビーム位置モニタ16を通過した荷電粒子ビームは多数のタングステンワイヤに当たって散乱し、ビーム位置モニタ16を通過した後の荷電粒子ビームの直径は拡大する。その結果、照射線量分布精度の低下、特に照射対象との境界部分において照射線量分布が悪くなる。
【0049】
上流ビーム位置モニタ装置を設置しない場合は、入射するビームの通過位置がビーム中心軸Bにあるかどうかを計測することができず、目標とする照射位置を荷電粒子ビームが通過しているかどうかを監視することができないため、誤った位置への照射を行っても荷電粒子ビームを停止させることができなくなる。
【0050】
これに対し、本実施の形態では、上流ビーム位置モニタ装置の場合は、荷電粒子ビームはビーム位置モニタの中央部分(モニタ面中央部分)を通過することに着目し、荷電粒子ビームが通過する中央部分の電極線の配置間隔を周辺部分よりも広くしたBタイプのビーム位置モニタ17を用いるものであり、これにより荷電粒子ビームがビーム位置モニタ17を通過するとき、荷電粒子ビームが当たるタングステンワイヤの本数が減るため、荷電粒子ビームの散乱が抑えられ、細いビームまま照射対象13に照射が可能となる。その結果、特に、照射部位の境界部分の照射線量分布の精度を高くすることができ、さらに、ビーム位置モニタ17の検出信号を用いて入射ビームの位置監視することで、安全なビーム照射を行うことができる。
【実施例2】
【0051】
図9は本発明の第2の実施の形態における荷電粒子線照射システムの全体構成を示す図である。
【0052】
図9において、照射ノズル装置5Aに備えられる上流ビーム位置モニタ装置6Aは、上述した従来のタイプAのビーム位置モニタ16と本発明のタイプBのビーム位置モニタ17の両方を備え、それらを駆動式とし、タイプAのビーム位置モニタ16(第1ビーム位置モニタ)とタイプBのビーム位置モニタ17(第2ビーム位置モニタ)を選択的に使用できるようにしたものである。
【0053】
図10は上流ビーム位置モニタ装置6Aの構成の一例を示す図である。
【0054】
上流ビーム位置モニタ装置6Aは矩形の開口部21を有する矩形の支持フレーム22を備え、支持フレーム22の開口部21の長手方向内側部分にガイドプレート23a,23bが設けられ、このガイドプレート23a,23b上にタイプAのビーム位置モニタ16とタイプBのビーム位置モニタ装置17が連結部材24によって連結された状態で移動可能に載置されている。支持フレーム22の開口部21における一方の短手方向内側部分には電動モータ25が取り付けられ、電動モータ25にネジ軸26が連結され、ネジ軸26はタイプAのビーム位置モニタ16の下部に取り付けられたボールネジ式のナット27に貫入され、かつナット27から突出した側の端部がブラケット28によって回転自在に支持されている。支持フレーム22の開口部21の長手方向内側部分における電動モータ近傍にはビーム位置モニタ16,17の移動端を画定するためのストッパ29a,29bが設けられている。支持フレーム22の両端は支持ビーム31a,31bを介して照射ノズル装置5Aの本体(ケース)に取り付けられている。電動モータ25とネジ軸26及びナット27はAタイプのビーム位置モニタ16とBタイプのビーム位置モニタ17を選択的に荷電粒子ビームの通過位置にセットするモニタ駆動装置を構成する。電動モータ25を正方向に駆動するとビーム位置モニタ16,17が図示左方向に移動し、ビーム位置モニタ17が支持フレーム22の図示左側の短手方向内側部分に当たってビーム位置モニタ16がビームライン上にセットされる。電動モータ25を逆方向に駆動するとビーム位置モニタ16,17が図示右方向に移動し、ビーム位置モニタ16がストッパ29a,29bに当たってビーム位置モニタ17がビームライン上にセットされる。
【0055】
患者治療を行う前には、照射ノズル装置5に入射する荷電粒子ビームがビーム中心軸Bを通過するように輸送系電磁石を調整することが必要となる。この輸送系電磁石の調整時には、照射ノズル装置5に入射するビーム位置精度を高くする必要がある。そのためには、従来のAタイプのビーム位置モニタ16のように中央部分の電極線間が狭いモニタにより調整する必要がある。一方、患者治療時においては第1の実施の形態で説明したように、ビームの散乱を抑えられるBタイプのビーム位置モニタ17を使用し、照射線量分布精度を高くする必要がある。
【0056】
本実施の形態においては、タイプAのビーム位置モニタ16とタイプBのビーム位置モニタ17を駆動式として選択的に荷電粒子ビームの通過位置にセットできるようにしたため、輸送系電磁石の調整時にはタイプAのビーム位置モニタ16をビームライン上にセットして、照射ノズル装置5に入射するビーム位置精度を高くすることができ、患者治療時にはタイプBのビーム位置モニタ17をビームライン上にセットして、ビームの散乱を抑え照射線量分布精度を高くすることができる。
【実施例3】
【0057】
図11は、本発明の第3の実施の形態における荷電粒子線照射システムの全体構成を示す図である。
【0058】
図11において、本実施の形態は、荷電粒子ビーム径(幅)をさらに小さくするため、照射ノズル装置5Bに備えられる上流ビーム位置モニタ装置6の下流側に上流ビーム位置モニタ装置6に近接してビーム遮断治具(ビーム遮断装置)19を設置し、上流ビーム位置モニタ装置6で散乱された余計なビームを遮断するようにしたものである。ビーム遮断治具19は中央部に開口を有し、この開口以外の部分でビームを遮断する。上流ビーム位置モニタ装置6としては、第1の実施の形態と同様、タイプBのビーム位置モニタ17が使用される。これによりタイプBのビーム位置モニタ17を通過するときに散乱した余計なビームを遮断し、さらに細いビームを照射対象に照射することができ、照射線量分布精度をさらに高くすることができる。また、開口の大きさ(直径)が異なる複数のビーム遮断治具19を用意し、これらを交換して使用することでビーム遮断径の大きさ(したがって照射されるビーム径)を任意に調整することができる。
【0059】
図12は、照射ノズル装置5Cに備えられる上流ビーム位置モニタ装置6として、従来のタイプAのビーム位置モニタ16を使用した場合のものである。これによってもビーム位置モニタ16を通過して散乱した余計なビームを遮断してビーム径を細くし、照射線量分布精度を高くすることができる。なお、図示はしないが、第2の実施の形態のタイプAのビーム位置モニタ16とタイプBのビーム位置モニタ17を選択的にビームの通過位置にセットする上流ビーム位置モニタ装置6Aの下流側に同様にビーム遮断治具19を設置してもよい。
【0060】
なお、以上の実施の形態では、ビームの照射位置移動時にビーム照射を停止し、照射時にビーム移動を停止するスポットスキャニング法を行うものとしたが、入射した荷電粒子ビームが細いビームのまま照射されることが望まれる照射法であれば、それ以外の照射法(例えば、ラスター走査法、ウォブラー法等それ以外のスキャニング照射方式)を行うものであってもよい。
【図面の簡単な説明】
【0061】
【図1】本発明の第1の実施の形態における荷電粒子線照射システムの全体構成を示す図である。
【図2】ビーム位置モニタ監視システムの機能を示すブロック図である。
【図3】ビーム位置モニタ監視システムの機能を示すフローチャートである。
【図4】ビーム中心軸の概念及びビーム中心軸と上流ビーム位置モニタ装置及び下流ビーム位置モニタ装置との位置関係を示す図である。
【図5A】上流ビーム位置モニタ装置の検出信号の分布形状を示す図である。
【図5B】下流ビーム位置モニタ装置の検出信号の分布形状を示す図である。
【図6】上流ビーム位置モニタ装置の構成の概念を従来のものと比較して示す図である。
【図7】従来のAタイプのビーム位置モニタの構造を示す図である。
【図8】本実施の形態におけるBタイプのビーム位置モニタの構造を示す図である。
【図9】本発明の第2の実施の形態における荷電粒子線照射システムの全体構成を示す図である。
【図10】第2の実施の形態における上流位置モニタ装置の構成の一例を示す図である。
【図11】本発明の第3の実施の形態における荷電粒子線照射システムの全体構成を示す図である。
【図12】本発明の第3の実施の形態の変形例として、上流ビーム位置モニタ装置に従来のタイプAのビーム位置モニタを使用した場合の構成を示す図である。
【符号の説明】
【0062】
1 荷電粒子発生装置
1a 前段加速器
1b シンクロトロン
1c ビーム輸送系
2 加速器制御装置
3 統括制御装置
4 照射制御装置
5 照射ノズル装置
6 上流ビーム位置モニタ装置
7 走査電磁石(Y軸方向)
8 走査電磁石(X軸方向)
9 線量モニタ
10 下流ビーム位置モニタ装置
11 上流ビーム位置モニタ制御装置
12 下流ビーム位置モニタ制御装置
13 照射対象(がん患部)
14 荷電粒子ビーム
15 インターロック信号
16 ビーム位置モニタ(タイプA)(第1ビーム位置モニタ)
16a X方向電極線
16b Y方向電極線
16c 高圧電極板
17 ビーム位置モニタ(タイプB)(第2ビーム位置モニタ)
17a X方向電極線
17b Y方向電極線
17c 高圧電極板
18 荷電粒子ビーム径
19 ビーム遮断治具
21 開口
22 支持フレーム
23a,23b ガイドプレート
24 連結部材
25 電動モータ
26 ネジ軸
27 ナット
28ブラケット
29a,29b ストッパ
A アイソセンタ
B ビーム中心軸
C モニタ中心
【特許請求の範囲】
【請求項1】
荷電粒子を出射する荷電粒子ビーム発生装置と、
前記荷電粒子ビームを照射対象物に出射する照射ノズル装置であって、前記荷電粒子ビーム発生装置から前記照射対象物に出射される前記荷電粒子ビームを走査する走査電磁石装置、この走査電磁石装置の上流側に配置され、前記照射ノズル装置に入射する荷電粒子ビームの通過位置を検知する上流ビーム位置検出モニタ装置、及び前記走査電磁石装置の下流側に配置され、前記走査電磁石にて走査されたビームの通過位置を検知する下流ビーム位置検知モニタ装置を有する照射ノズル装置と、
前記上流ビーム位置検出モニタ装置で検知された出力結果から前記荷電粒子の通過位置を算出する上流ビーム位置モニタ制御装置と、
前記下流ビーム位置モニタ装置で検知された出力結果から前記の走査されたビームの通過位置を算出する下流ビーム位置モニタ制御装置とを備え、
前記上流ビーム位置モニタ装置は、二方向に張り渡されかつそれぞれの方向において平行に配置された複数の電極線を有しかつ前記荷電粒子ビームが通過する中央部分の電極線の配置間隔が周辺部分よりも広いことを特徴とする荷電粒子線照射システム。
【請求項2】
請求項1記載の荷電粒子線照射システムにおいて、
前記上流ビーム位置モニタ装置は、二方向に張り渡されかつそれぞれの方向において平行に配置された複数の電極線を有しかつ電極線の配置間隔が全体的に等しい第1ビーム位置モニタと、二方向に張り渡されかつそれぞれの方向において平行に配置された複数の電極線を有しかつ前記荷電粒子ビームが通過する中央部分の電極線の配置間隔が周辺部分よりも広い第2ビーム位置モニタと、前記第1ビーム位置モニタと前記第2ビーム位置モニタを選択的に前記荷電粒子ビームの通過位置にセットするモニタ駆動装置とを有することを特徴とする荷電粒子線照射システム。
【請求項3】
請求項1記載の荷電粒子線照射システムにおいて、
前記上流ビーム位置モニタ装置の下流側に前記上流ビーム位置モニタ装置に近接して設置され、中央部に開口を有し、その開口以外の部分で荷電粒子ビームを遮断するビーム遮断装置をさらに備えることを特徴とする荷電粒子線照射システム。
【請求項4】
荷電粒子を出射する荷電粒子ビーム発生装置と、
前記荷電粒子ビームを照射対象物に出射する照射ノズル装置であって、前記荷電粒子ビーム発生装置から前記照射対象物に出射される前記荷電粒子ビームを走査する走査電磁石装置、この走査電磁石装置の上流側に配置され、前記照射ノズル装置に入射する荷電粒子ビームの通過位置を検知する上流ビーム位置検出モニタ装置、及び前記走査電磁石装置の下流側に配置され、前記走査電磁石にて走査されたビームの通過位置を検知する下流ビーム位置検知モニタ装置を有する照射ノズル装置と、
前記上流ビーム位置検出モニタ装置で検知された出力結果から前記荷電粒子の通過位置を算出する上流ビーム位置モニタ制御装置と、
前記第下流ビーム位置モニタ装置で検知された出力結果から前記の走査されたビームの通過位置を算出する下流ビーム位置モニタ制御装置と、
前記上流ビーム位置モニタ装置の下流側に前記上流ビーム位置モニタ装置に近接して設置され、中央部に開口を有し、その開口以外の部分で荷電粒子ビームを遮断するビーム遮断装置とを備えることを特徴とする荷電粒子線照射システム。
【請求項5】
照射対象物に出射される荷電粒子ビームを走査する走査電磁石装置と、
この走査電磁石装置の上流側に配置され、入射する荷電粒子ビームの通過位置を検知する上流ビーム位置検出モニタ装置と、
前記走査電磁石装置の下流側に配置され、前記走査電磁石にて走査されたビームの通過位置を検知する下流ビーム位置検知モニタ装置とを備え、
前記上流ビーム位置モニタ装置は、二方向に張り渡されかつそれぞれの方向において平行に配置された複数の電極線を有しかつ前記荷電粒子ビームが通過する中央部分の電極線の配置間隔が周辺部分よりも広いことを特徴とする照射ノズル装置。
【請求項6】
請求項5記載の照射ノズル装置において、
前記上流ビーム位置モニタ装置は、二方向に張り渡されかつそれぞれの方向において平行に配置された複数の電極線を有しかつ電極線の配置間隔が全体的に等しい第1ビーム位置モニタと、二方向に張り渡されかつそれぞれの方向において平行に配置された複数の電極線を有しかつ前記荷電粒子ビームが通過する中央部分の電極線の配置間隔が周辺部分よりも広い第2ビーム位置モニタと、前記第1ビーム位置モニタと前記第2ビーム位置モニタを選択的に前記荷電粒子ビームの通過位置にセットするモニタ駆動装置とを有することを特徴とする照射ノズル装置。
【請求項7】
請求項5記載の照射ノズル装置において、
前記上流ビーム位置モニタ装置の下流側に前記上流ビーム位置モニタ装置に近接して設置され、中央部に開口を有し、その開口以外の部分で荷電粒子ビームを遮断するビーム遮断装置をさらに備えることを特徴とする照射ノズル装置。
【請求項8】
照射対象物に出射される荷電粒子ビームを走査する走査電磁石装置と、
この走査電磁石装置の上流側に配置され、入射する荷電粒子ビームの通過位置を検知する上流ビーム位置検出モニタ装置と、
前記走査電磁石装置の下流側に配置され、前記走査電磁石にて走査されたビームの通過位置を検知する下流ビーム位置検知モニタ装置と、
前記上流ビーム位置モニタ装置の下流側に前記上流ビーム位置モニタ装置に近接して設置され、中央部に開口を有し、その開口以外の部分で荷電粒子ビームを遮断するビーム遮断装置とを備えることを特徴とする照射ノズル装置。
【請求項1】
荷電粒子を出射する荷電粒子ビーム発生装置と、
前記荷電粒子ビームを照射対象物に出射する照射ノズル装置であって、前記荷電粒子ビーム発生装置から前記照射対象物に出射される前記荷電粒子ビームを走査する走査電磁石装置、この走査電磁石装置の上流側に配置され、前記照射ノズル装置に入射する荷電粒子ビームの通過位置を検知する上流ビーム位置検出モニタ装置、及び前記走査電磁石装置の下流側に配置され、前記走査電磁石にて走査されたビームの通過位置を検知する下流ビーム位置検知モニタ装置を有する照射ノズル装置と、
前記上流ビーム位置検出モニタ装置で検知された出力結果から前記荷電粒子の通過位置を算出する上流ビーム位置モニタ制御装置と、
前記下流ビーム位置モニタ装置で検知された出力結果から前記の走査されたビームの通過位置を算出する下流ビーム位置モニタ制御装置とを備え、
前記上流ビーム位置モニタ装置は、二方向に張り渡されかつそれぞれの方向において平行に配置された複数の電極線を有しかつ前記荷電粒子ビームが通過する中央部分の電極線の配置間隔が周辺部分よりも広いことを特徴とする荷電粒子線照射システム。
【請求項2】
請求項1記載の荷電粒子線照射システムにおいて、
前記上流ビーム位置モニタ装置は、二方向に張り渡されかつそれぞれの方向において平行に配置された複数の電極線を有しかつ電極線の配置間隔が全体的に等しい第1ビーム位置モニタと、二方向に張り渡されかつそれぞれの方向において平行に配置された複数の電極線を有しかつ前記荷電粒子ビームが通過する中央部分の電極線の配置間隔が周辺部分よりも広い第2ビーム位置モニタと、前記第1ビーム位置モニタと前記第2ビーム位置モニタを選択的に前記荷電粒子ビームの通過位置にセットするモニタ駆動装置とを有することを特徴とする荷電粒子線照射システム。
【請求項3】
請求項1記載の荷電粒子線照射システムにおいて、
前記上流ビーム位置モニタ装置の下流側に前記上流ビーム位置モニタ装置に近接して設置され、中央部に開口を有し、その開口以外の部分で荷電粒子ビームを遮断するビーム遮断装置をさらに備えることを特徴とする荷電粒子線照射システム。
【請求項4】
荷電粒子を出射する荷電粒子ビーム発生装置と、
前記荷電粒子ビームを照射対象物に出射する照射ノズル装置であって、前記荷電粒子ビーム発生装置から前記照射対象物に出射される前記荷電粒子ビームを走査する走査電磁石装置、この走査電磁石装置の上流側に配置され、前記照射ノズル装置に入射する荷電粒子ビームの通過位置を検知する上流ビーム位置検出モニタ装置、及び前記走査電磁石装置の下流側に配置され、前記走査電磁石にて走査されたビームの通過位置を検知する下流ビーム位置検知モニタ装置を有する照射ノズル装置と、
前記上流ビーム位置検出モニタ装置で検知された出力結果から前記荷電粒子の通過位置を算出する上流ビーム位置モニタ制御装置と、
前記第下流ビーム位置モニタ装置で検知された出力結果から前記の走査されたビームの通過位置を算出する下流ビーム位置モニタ制御装置と、
前記上流ビーム位置モニタ装置の下流側に前記上流ビーム位置モニタ装置に近接して設置され、中央部に開口を有し、その開口以外の部分で荷電粒子ビームを遮断するビーム遮断装置とを備えることを特徴とする荷電粒子線照射システム。
【請求項5】
照射対象物に出射される荷電粒子ビームを走査する走査電磁石装置と、
この走査電磁石装置の上流側に配置され、入射する荷電粒子ビームの通過位置を検知する上流ビーム位置検出モニタ装置と、
前記走査電磁石装置の下流側に配置され、前記走査電磁石にて走査されたビームの通過位置を検知する下流ビーム位置検知モニタ装置とを備え、
前記上流ビーム位置モニタ装置は、二方向に張り渡されかつそれぞれの方向において平行に配置された複数の電極線を有しかつ前記荷電粒子ビームが通過する中央部分の電極線の配置間隔が周辺部分よりも広いことを特徴とする照射ノズル装置。
【請求項6】
請求項5記載の照射ノズル装置において、
前記上流ビーム位置モニタ装置は、二方向に張り渡されかつそれぞれの方向において平行に配置された複数の電極線を有しかつ電極線の配置間隔が全体的に等しい第1ビーム位置モニタと、二方向に張り渡されかつそれぞれの方向において平行に配置された複数の電極線を有しかつ前記荷電粒子ビームが通過する中央部分の電極線の配置間隔が周辺部分よりも広い第2ビーム位置モニタと、前記第1ビーム位置モニタと前記第2ビーム位置モニタを選択的に前記荷電粒子ビームの通過位置にセットするモニタ駆動装置とを有することを特徴とする照射ノズル装置。
【請求項7】
請求項5記載の照射ノズル装置において、
前記上流ビーム位置モニタ装置の下流側に前記上流ビーム位置モニタ装置に近接して設置され、中央部に開口を有し、その開口以外の部分で荷電粒子ビームを遮断するビーム遮断装置をさらに備えることを特徴とする照射ノズル装置。
【請求項8】
照射対象物に出射される荷電粒子ビームを走査する走査電磁石装置と、
この走査電磁石装置の上流側に配置され、入射する荷電粒子ビームの通過位置を検知する上流ビーム位置検出モニタ装置と、
前記走査電磁石装置の下流側に配置され、前記走査電磁石にて走査されたビームの通過位置を検知する下流ビーム位置検知モニタ装置と、
前記上流ビーム位置モニタ装置の下流側に前記上流ビーム位置モニタ装置に近接して設置され、中央部に開口を有し、その開口以外の部分で荷電粒子ビームを遮断するビーム遮断装置とを備えることを特徴とする照射ノズル装置。
【図1】

【図2】
【図3】
【図4】
【図5A】
【図5B】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図2】
【図3】
【図4】
【図5A】
【図5B】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【公開番号】特開2010−136835(P2010−136835A)
【公開日】平成22年6月24日(2010.6.24)
【国際特許分類】
【出願番号】特願2008−314992(P2008−314992)
【出願日】平成20年12月10日(2008.12.10)
【出願人】(000005108)株式会社日立製作所 (27,607)
【Fターム(参考)】
【公開日】平成22年6月24日(2010.6.24)
【国際特許分類】
【出願日】平成20年12月10日(2008.12.10)
【出願人】(000005108)株式会社日立製作所 (27,607)
【Fターム(参考)】
[ Back to top ]