
荷電粒子線照射装置、荷電粒子線照射方法及び荷電粒子線照射プログラム
【課題】荷電粒子線の照射量を精度良く制御する。
【解決手段】荷電粒子線照射装置100は、荷電粒子線Rを被照射物52上にて走査する走査磁石3と、走査磁石3により被照射物上にて走査される荷電粒子線Rの走査ラインL上の各目標走査位置における荷電粒子線Rの照射量を設定する照射量設定部11と、設定された照射量に基づき、目標走査位置のそれぞれにおける荷電粒子線の目標走査速度を設定する走査速度設定部11と、を備える。
【解決手段】荷電粒子線照射装置100は、荷電粒子線Rを被照射物52上にて走査する走査磁石3と、走査磁石3により被照射物上にて走査される荷電粒子線Rの走査ラインL上の各目標走査位置における荷電粒子線Rの照射量を設定する照射量設定部11と、設定された照射量に基づき、目標走査位置のそれぞれにおける荷電粒子線の目標走査速度を設定する走査速度設定部11と、を備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、荷電粒子線照射装置、荷電粒子線照射方法及び荷電粒子線照射プログラムに関する。
【背景技術】
【0002】
従来、被照射物(例えば患者体内の腫瘍)に陽子線などの荷電粒子線を照射して、被照射物に治療を施すための荷電粒子線照射装置が知られている。このような装置に関する技術として、例えば特許文献1には、被照射物への荷電粒子線の照射量を調整するために、荷電粒子線のビーム強度を変調することが記載されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2000−354637号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ここで、荷電粒子線のビーム強度は不安定なものであるので、これを正確に変調させるのは難しい。このため、特許文献1に記載されるようにビーム強度を制御量として荷電粒子線の照射量を調整する手法では、照射量を精度良く制御することができないという問題があった。
【0005】
また、荷電粒子線照射装置の適用分野では、例えば患者体内の腫瘍の放射線治療など、被照射物の周囲に荷電粒子線を照射することなく、被照射物のみに荷電粒子線を照射することが望ましいため、荷電粒子線を高精度に所望の被照射物に照射できることが求められている。
【0006】
本発明は、上記の問題点を解決するためになされたものであり、荷電粒子線の照射量を精度良く制御できる荷電粒子線照射装置、荷電粒子線照射方法及び荷電粒子線照射プログラムを提供することを目的とする。
【課題を解決するための手段】
【0007】
本発明者らは、鋭意研究を重ねた結果、荷電粒子線の照射量を精度良く制御するには、荷電粒子線の走査速度が影響していることを見出した。
【0008】
そこで、上記課題を解決するために、本発明に係る荷電粒子線照射装置は、被照射物に荷電粒子線を照射する荷電粒子線照射装置であって、被照射物へ照射される荷電粒子線を走査する走査手段と、走査手段により被照射物上を走査される荷電粒子線の走査ライン上の複数の目標走査位置のそれぞれにおける荷電粒子線の照射量を設定する照射量設定手段と、照射量設定手段により設定された照射量に基づき、目標走査位置のそれぞれにおける荷電粒子線の目標走査速度を設定する走査速度設定手段と、を備えることを特徴とする。
【0009】
同様に、上記課題を解決するために、本発明に係る荷電粒子線照射方法は、被照射物に荷電粒子線を照射する荷電粒子線照射方法であって、走査手段により被照射物上を走査される荷電粒子線の走査ライン上の複数の目標走査位置のそれぞれにおける荷電粒子線の照射量を設定する照射量設定ステップと、照射量設定ステップにおいて設定された照射量に基づき、目標走査位置のそれぞれにおける荷電粒子線の目標走査速度を設定する走査速度設定ステップと、を備えることを特徴とする。
【0010】
同様に、上記課題を解決するために、本発明に係る荷電粒子線照射プログラムは、被照射物に荷電粒子線を照射する荷電粒子線照射プログラムであって、走査手段により被照射物上を走査される荷電粒子線の走査ライン上の複数の目標走査位置のそれぞれにおける荷電粒子線の照射量を設定する照射量設定機能と、照射量設定機能により設定された照射量に基づき、目標走査位置のそれぞれにおける荷電粒子線の目標走査速度を設定する走査速度設定機能と、をコンピュータに実現させることを特徴とする。
【0011】
このような荷電粒子線照射装置、荷電粒子線照射方法及び荷電粒子線照射プログラムによれば、被照射物上の荷電粒子線の複数の目標走査位置のそれぞれにおける荷電粒子線の照射量が設定されると、この照射量に基づき、各目標走査位置における荷電粒子線の目標走査速度が設定される。荷電粒子線の走査速度は、従来、荷電粒子線の照射量の制御量として用いられていたビーム強度と比べて、安定させることが容易であるため、所望の値に正確に変調させることが可能である。したがって、目標走査速度を荷電粒子線の照射量を調整するための制御量として用いることによって、制御量を所望の値に正確に変調させることが可能となり、この結果、荷電粒子線の照射量を精度良く制御できる。
【0012】
また、荷電粒子線照射装置は、目標走査位置及び目標走査速度にしたがって、荷電粒子線が被照射物上にて走査されるよう走査手段を制御する制御手段を備えることが好適である。
【0013】
この構成により、安定した調整が可能な目標走査速度を、荷電粒子線の照射量を調整するための制御量として用いることによって、制御量を所望の値に正確に変調させることが可能となり、この結果、荷電粒子線の照射量を精度良く制御できる。
【0014】
また、荷電粒子線照射装置は、走査手段により被照射物上を走査された荷電粒子線の走査位置及び走査速度を計測する計測手段を備え、制御手段は、目標走査位置と計測手段により計測された走査位置との誤差が無くなるように、また、目標走査速度と計測手段により計測された走査速度との誤差が無くなるように、走査手段への制御入力を調整する位置速度フィードバック制御を行い、走査手段を制御することが好適である。
【0015】
この構成により、荷電粒子線の走査位置及び走査速度に基づき位置速度フィードバック制御を行って走査手段を制御するので、目標走査位置及び目標走査速度への追従性が向上し、荷電粒子線の照射量をより一層高精度に制御することができる。
【0016】
また、本発明の荷電粒子線照射装置は、荷電粒子線のビーム強度を検知するビーム強度検知手段を更に備え、制御手段は、ビーム強度検知手段で検知されたビーム強度が所定の誤差範囲外に変動した場合には、当該変動を相殺するように走査手段による走査速度を調整することが好ましい。
【0017】
この構成によれば、荷電粒子線のビーム強度が変動した場合にも、正確な照射量での荷電粒子線の照射を継続することができる。
【発明の効果】
【0018】
本発明に係る荷電粒子線照射装置、荷電粒子線照射方法及び荷電粒子線照射プログラムによれば、荷電粒子線の照射量を精度良く制御できる。
【図面の簡単な説明】
【0019】
【図1】本発明の一実施形態に係る荷電粒子線照射装置が適用される荷電粒子線治療装置を示す斜視図である。
【図2】図1の荷電粒子線照射装置を示す斜視図である。
【図3】荷電粒子線照射装置の制御系を示す図である。
【図4】走査制御部における位置・フィードバック制御を表すブロック線図である。
【図5】本実施形態の荷電粒子線照射装置において実行される処理を示すフローチャートである。
【図6】本発明に係る荷電粒子線照射プログラムの構成を示す図である。
【発明を実施するための形態】
【0020】
以下、図面を参照しつつ本発明の好適な実施形態について詳細に説明する。なお、以下の説明において同一又は相当要素には同一符号を付し、重複する説明は省略する。
【0021】
図1は、本発明の一実施形態に係る荷電粒子線照射装置が適用される荷電粒子線治療装置を示す斜視図であり、図2は、図1の荷電粒子線照射装置を示す斜視図であり、図3は、荷電粒子線照射装置の制御系を示す図である。
【0022】
図1に示すように、照射部1は、荷電粒子線照射装置100において、治療台105を取り囲むように設けられた回転ガントリ103に取り付けられ、この回転ガントリ103によって治療台105の回りに回転可能とされている。そして、治療台105の患者の体内の腫瘍52(被照射物)に対して、照射方向Aで荷電粒子線R(図3参照)を照射する。なお、図1には示されていないが、荷電粒子線照射装置100は、治療台105及び回転ガントリ103とは離れた位置に荷電粒子線Rを生成するサイクロトロンを備え、ビーム輸送系を介してサイクロトロンと照射部1とを連結している。
【0023】
この照射部1は、図3に示すように、スキャニング方式により、治療台105上の患者51の体内の腫瘍52に向けて荷電粒子線Rを連続照射する。具体的には、照射部1は、腫瘍52を深さ方向(Z方向または照射方向A)に複数層に分け、各層に設定された照射野Fにおいて走査ラインLに沿って荷電粒子線Rを走査速度Vで走査しながら連続照射(いわゆる、ラスタースキャニングあるいはラインスキャニング)する。つまり、照射部1は、腫瘍52に合わせた3次元の照射野を形成するため、腫瘍52を複数の層に分割してこれらの各層のそれぞれに対して平面スキャニングを行う。これにより、腫瘍52の3次元形状に合わせて荷電粒子線Rが照射されることとなる。
【0024】
荷電粒子線Rは、電荷をもった粒子を高速に加速したものであり、荷電粒子線Rとしては、例えば陽子線、重粒子(重イオン)線、電子線等が挙げられる。照射野Fは、例えば最大200mm×200mmの領域とされ、その外形が矩形状とされている。なお、照射野Fの形状は、種々の形状としてもよく、例えば腫瘍52の形状に沿った形状としても勿論よい。走査ラインLは、荷電粒子線Rを照射する予定線(仮想線)であり、上述の矩形状の照射野Fの場合、走査ラインLは、ラインスキャニングを例にとると、矩形波状に延在している。
【0025】
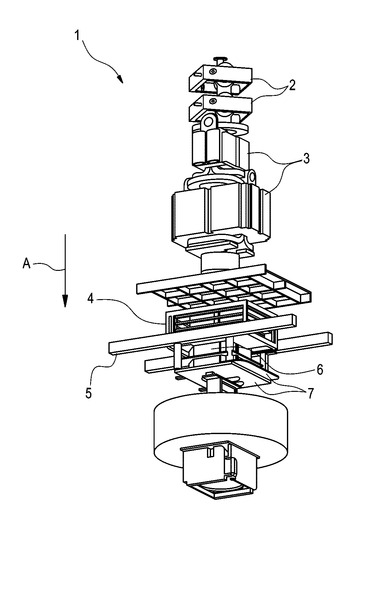
図2に示すように、照射部1は、荷電粒子線Rの照射方向Aに順に配列され、ビーム輸送ラインを介してサイクロトロンから入力された荷電粒子線Rが発散するのを抑え収束させるための四極磁石2と、荷電粒子線RをX方向とY方向に走査する走査磁石(スキャニングマグネット)(走査手段)3と、照射した荷電粒子線Rの線量(ビーム強度)を測定する線量モニタ(ビーム強度検知手段)4と、荷電粒子線Rを照射する前後に腫瘍52の位置・大きさ・形状を確認するためX線によりCT画像を撮影する際にX線を照射するX線管5と、照射野Fのビーム(加速粒子線)の平坦度合い(ビームが到達した奥行きの平坦度合い)を測定する平坦モニタ(フラットネスモニタ)6と、荷電粒子線Rが存在するX方向とY方向の位置を測定するビーム位置モニタ(計測手段)7と、を備えている。
【0026】
なお、図3に示すように、X方向及びY方向とは、Z方向(照射方向A)と直交し、さらに相互に直交する2方向であり、腫瘍52の照射野Fのなす平面上の位置を特定する2方向である。また、図3に示すように、走査磁石3は、荷電粒子線RのX方向の走査位置を制御するための一組の電磁石3aと、Y方向の走査位置を調整するための一組の電磁石3bと、を含んで構成される。ビーム位置モニタ7は、荷電粒子線RのX方向の走査位置を検知するためのグリッドワイヤ7aと、Y方向の走査位置を検知するためのグリッドワイヤ7bとを含んで構成される。
【0027】
特に本実施形態では、照射部1は、照射野F上の走査ラインLの各走査位置において、荷電粒子線Rの照射量を当該走査位置における走査速度に基づき調整するよう構成されている。ここで、本実施形態では、荷電粒子線Rの「照射量」は、腫瘍52に照射される荷電粒子の量を意味するものとして用いられる。
【0028】
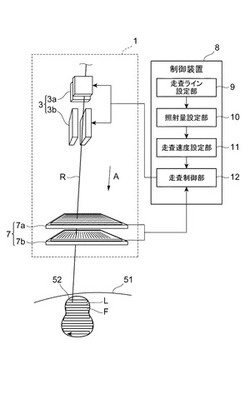
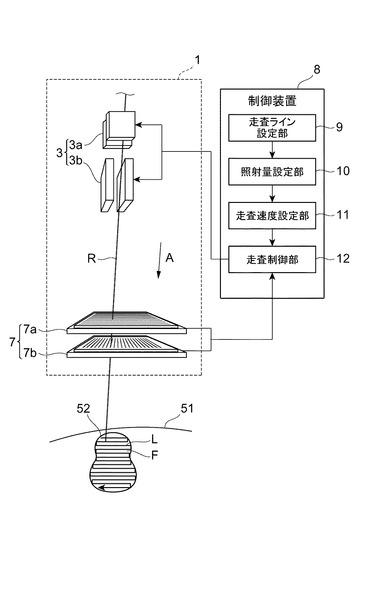
以下、図3を参照して、照射部1の制御系について説明する。図3には、照射部1の制御系として、照射部1の走査磁石3と、ビーム位置モニタ7とが示され、さらに照射部1の外部に配置され、走査磁石3及びビーム位置モニタ7と通信可能に接続される制御装置8が示されている。
【0029】
制御装置8は、照射野Fにおける荷電粒子線Rの走査ラインL上の目標走査位置ごとに照射量を決定し、この決定された照射量を実現すべく走査軌道(目標走査位置及び目標走査速度)を決定する。そして、ビーム位置モニタ7により計測される荷電粒子線Rの走査軌道に基づき、走査磁石3の位置・速度フィードバック制御を行う。
【0030】
制御装置8は、図3に示すように、走査ライン設定部9、照射量設定部(照射量設定手段)10、走査速度設定部11、及び走査制御部(制御手段)12を備えて構成される。
【0031】
走査ライン設定部9は、走査磁石3により腫瘍52上にて走査される荷電粒子線Rの走査ラインLを設定する。より詳細には、走査ライン設定部9は、腫瘍52の照射野Fの形状に応じて、この照射野Fの全体にわたり荷電粒子線Rが照査されるように走査ラインLを設定する。例えば、照射野Fが矩形状の場合には、走査ラインLは矩形波状に形成される。走査ライン設定部9は、設定した走査ラインL上に複数の目標走査位置を設定する。この目標走査位置は、後述する走査制御部12により、位置フィードバック制御の目標値として用いられる。目標走査位置は、例えば走査ラインL上に等間隔で設定される。走査ライン設定部9は、目標走査位置の情報を照射量設定部10に送信する。
【0032】
照射量設定部10は、走査ライン設定部9により設定された走査ラインL上の各目標走査位置における荷電粒子線Rの照射量を決定する。荷電粒子線Rの照射量は、照射部1のオペレータの入力操作によって取得してもよいし、腫瘍の症状や照射野Fの深度などの諸条件に応じて、所与のデータベースなどを参照して設定してもよい。照射量設定部10は、各目標走査位置における荷電粒子線Rの照射量を設定すると、この情報を走査速度設定部11に送信する。
【0033】
走査速度設定部11は、照射量設定部10により設定された照射量に基づき、目標走査位置のそれぞれにおける荷電粒子線Rの目標走査速度を設定する。荷電粒子線Rのビーム強度が一定である場合、荷電粒子線Rの照射量と走査速度との間には一意の対応関係があるので、走査速度設定部11は、例えば照射量と走査速度とを対応付けたテーブルを保持しておき、所与の照射量に応じた走査速度を選択して、目標走査速度として設定する。ここでは、所与の照射量が大きいほど目標走査速度を遅く設定し、所与の照射量が小さいほど目標走査速度を速く設定すればよい。走査速度設定部11は、設定した目標走査速度を、目標走査位置と対応付けて目標走査軌道とし、走査制御部12に送信する。
【0034】
走査制御部12は、目標走査軌道(目標走査位置及び目標走査速度)にしたがって、荷電粒子線Rが腫瘍52上にて走査されるよう走査磁石3を制御する。走査制御部12は、具体的には、走査磁石3の磁力を調整する電流を発生する電源(図示せず)に対して走査磁石の制御入力として送信する電流強度を、位置・速度フィードバック制御する。より詳細には、目標走査位置とビーム位置モニタ7により計測された実際の荷電粒子線Rの走査位置との誤差が無くなるように、また、目標走査速度とビーム位置モニタ7により計測された実際の荷電粒子線Rの走査速度との誤差が無くなるように、位置・速度フィードバック制御を行い、走査磁石3への制御入力(電源の電流強度)を調整する。
【0035】
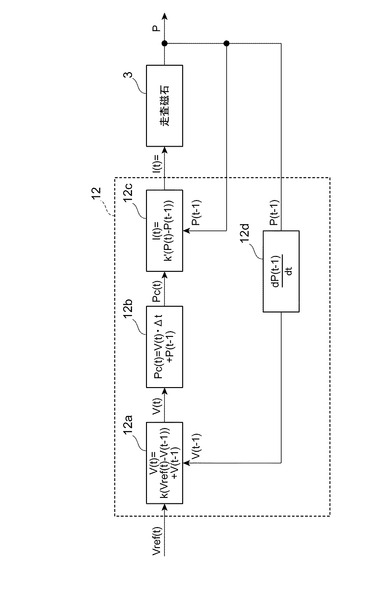
ここで、図4を参照して、走査制御部12における位置・フィードバック制御の詳細を説明する。図4は、走査制御部12における位置・フィードバック制御を表すブロック線図である。図4において破線で囲んだ領域が、走査制御部12の処理と対応している。
【0036】
まず、図4のブロック12aに示すように、時刻tにおける目標走査速度Vref(t)と、ビーム位置モニタ7により計測された1ステップ前の時刻t−1における走査速度V(t−1)との差分に定数kを乗じて、次の(1)式のように時刻tの走査速度V(t)を算出する。なお、走査速度V(t−1)は、例えばブロック12dに示すように、ビーム位置モニタ7により計測された1ステップ前の時刻t―1における荷電粒子線Rの走査位置P(t−1)を、時刻tについて一階微分して導出することができる。
v(t)=k・(Vref(t)−V(t−1))+V(t−1) (1)
【0037】
次に、図4のブロック12bに示すように、(1)式で算出した走査速度V(t)に時間幅Δt(時刻tとt−1との差分)を乗じて、次の(2)式のように時刻tにおける理論上の走査位置Pc(t)を算出する。なお、このPc(t)は、目標走査位置Pref(t)と対応する値である。
Pc(t)=V(t)・Δt+P(t−1) (2)
【0038】
次に、図4のブロック12cに示すように、(2)式で算出した理論上の走査位置Pc(t)と、ビーム位置モニタ7により計測された1ステップ前の時刻t−1における走査位置P(t−1)との差分に定数k’を乗じて、次の(3)式のように走査磁石3への制御入力I(t)を算出する。この制御入力は、具体的には走査磁石3の磁力を発生させるための電源(図示せず)の電流強度である。
I(t)=k’・(Pc(t)−P(t−1)) (3)
【0039】
(3)式で算出された電流強度に基づき走査磁石3の電源の電流強度が調整されると、この電流強度に応じて走査磁石3の磁力が調整され、この結果、荷電粒子線Rの走査位置が調整される。このときの走査位置P(t)がビーム位置モニタ7により計測され、ブロック12a及びブロック12cにフィードバックされる。
【0040】
なお、走査位置P、走査速度V、理論上の走査位置Pc、目標走査速度Vrefは、走査磁石3及びビーム位置モニタ7がそれぞれX、Y方向の制御及び計測を個別に行うよう構成されているため、それぞれX方向成分とY方向成分からなる2次元ベクトルとして構成されている。
【0041】
制御装置8は、物理的には、CPU(Central Processing Unit)、主記憶装置であるRAM(Random Access Memory)及びROM(Read Only Memory)、ハードディスク装置等の補助記憶装置、入力デバイスである入力キー等の入力装置、ディスプレイ等の出力装置、通信モジュールなどを有するコンピュータとして構成されている。図3,4に示した制御装置8の各機能は、CPU、RAM、ROM等のハードウェア上に所定のコンピュータソフトウェアを読み込ませることにより、CPUの制御のもとで入力装置、出力装置、通信モジュールを動作させるとともに、RAMやROM、補助記憶装置におけるデータの読み出し及び書き込みを行うことで実現される。
【0042】
次に、図5を参照して、本実施形態の照射部1において実行される処理を説明すると共に、本実施形態に係る荷電粒子線照射方法について説明する。
【0043】
まず、走査ライン設定部9により、走査磁石3により腫瘍52上にて走査される荷電粒子線Rの走査ラインLが設定される(S101)。走査ライン設定部9は、設定した走査ラインL上に、位置フィードバック制御の目標値として用いられる複数の目標走査位置を設定し、この目標走査位置の情報を照射量設定部10に送信する。
【0044】
次に、照射量設定部10により、ステップS101にて設定された目標走査位置のそれぞれにおける荷電粒子線Rの照射量が設定される(S102:照射量設定ステップ)。荷電粒子線Rの照射量は、照射部1のオペレータの入力操作によって取得してもよいし、腫瘍の症状や照射野Fの深度などの諸条件に応じて、所与のデータベースなどを参照して設定してもよい。照射量設定部10は、各目標走査位置における荷電粒子線Rの照射量を設定すると、この情報を走査速度設定部11に送信する。
【0045】
次に、走査速度設定部11により、ステップS102にて設定された照射量に基づき、目標走査位置のそれぞれにおける荷電粒子線Rの目標走査速度が設定される(S103:走査速度設定ステップ)。走査速度設定部11は、例えば照射量と走査速度とを対応付けたテーブルを保持しておき、所与の照射量に応じた走査速度を選択して、目標走査速度として設定する。走査速度設定部11は、設定した目標走査速度を、目標走査位置と対応付けて目標走査軌道とし、走査制御部12に送信する。
【0046】
そして、走査制御部12により、目標走査軌道(目標走査位置及び目標走査速度)にしたがって、荷電粒子線Rが腫瘍52上にて走査されるよう走査磁石3の制御が実行される(S104)。走査制御部12は、図4を参照して説明したように、目標走査軌道を制御入力とし、ビーム位置モニタ7により計測された実際の荷電粒子線Rの走査軌道(走査位置、走査速度)をフィードバック成分として、走査磁石3の磁力を調整する電源の電流強度を調整することにより、荷電粒子線Rの走査軌道の位置・速度フィードバック制御を行う。
【0047】
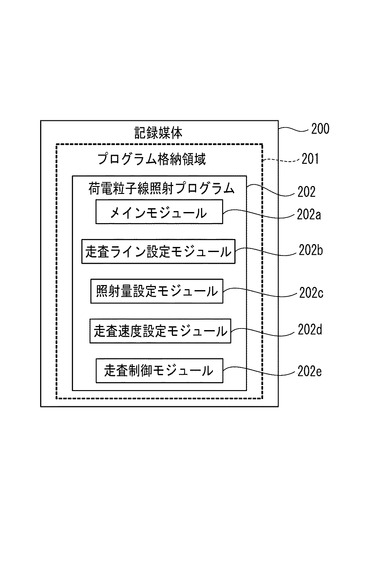
次に、図6を参照して、上述した照射部1において実行される一連の処理をコンピュータに実行させるための荷電粒子線照射プログラムについて説明する。図6に示すように、荷電粒子線照射プログラム202は、コンピュータが備える記憶媒体200に形成されたプログラム格納領域201内に格納されている。
【0048】
荷電粒子線照射プログラム202は、荷電粒子線照射処理を総括的に制御するメインモジュール202aと、走査ライン設定モジュール202bと、照射量設定モジュール(照射量設定機能)202cと、走査速度設定モジュール(走査速度設定機能)202dと、走査制御モジュール202eとを備えて構成される。
【0049】
走査ライン設定モジュール202b、照射量設定モジュール202c、走査速度設定モジュール202d、及び走査制御モジュール202eを実行させることにより実現される機能は、上述した図3の制御装置8の走査ライン設定部9、照射量設定部10、走査速度設定部11、及び走査制御部12の機能とそれぞれ同様である。
【0050】
なお、荷電粒子線照射プログラム202は、その一部又は全部が、通信回線等の伝送媒体を介して伝送され、他の機器により受信されて記録(インストールを含む)される構成としてもよい。また、荷電粒子線照射プログラム202は、その一部又は全部が、CD−ROM、DVD−ROM、フラッシュメモリなどの持ち運び可能な記憶媒体に格納された状態から、他の機器に記録(インストールを含む)される構成としてもよい。
【0051】
このような荷電粒子線照射装置、荷電粒子線照射方法及び荷電粒子線照射プログラムによれば、腫瘍52上の荷電粒子線Rの目標走査位置のそれぞれにおける荷電粒子線Rの照射量が設定されると、この照射量に基づき、各目標走査位置における荷電粒子線Rの目標走査速度が設定される。荷電粒子線Rの走査速度は、従来、荷電粒子線Rの照射量の制御量として用いられていたビーム強度と比べて、安定させることが容易であるため、所望の値に正確に変調させることが可能である。したがって、目標走査速度を荷電粒子線Rの照射量を調整するための制御量として用いることによって、制御量を所望の値に正確に変調させることが可能となり、この結果、荷電粒子線Rの照射量を精度良く制御できる。
【0052】
また、走査制御部12が、目標走査位置及び目標走査速度にしたがって、荷電粒子線Rが腫瘍52上にて走査されるよう走査磁石3を制御するため、安定した調整が可能な目標走査速度を、荷電粒子線Rの照射量を調整するための制御量として用いることによって、制御量を所望の値に正確に変調させることが可能となり、この結果、荷電粒子線Rの照射量を精度良く制御できる。
【0053】
また、走査制御部12は、目標走査位置とビーム位置モニタ7により計測された走査位置との誤差が無くなるように、また、目標走査速度とビーム位置モニタ7により計測された走査速度との誤差が無くなるように、走査磁石3への制御入力(電流強度)を調整する位置速度フィードバック制御を行い、走査磁石3を制御する。このため、荷電粒子線Rの走査位置及び走査速度に基づき位置速度フィードバック制御を行って走査磁石3を制御するので、目標走査位置及び目標走査速度への追従性が向上し、荷電粒子線Rの照射量をより一層高精度に制御することができる。
【0054】
以上、本発明に係る荷電粒子線照射装置、荷電粒子線照射方法及び荷電粒子線照射プログラムについて好適な実施形態を挙げて説明したが、本発明は上記実施形態に限られるものではない。走査制御部12による位置速度フィードバック制御は、図4に示したブロック線図の構成とは別の構成としてもよく、例えば、目標走査位置に基づく位置フィードバック制御と、目標走査速度に基づく速度フィードバック制御を個別に行い、両方の制御出力を合計した値を電流強度として走査磁石3の電源を調整してもよい。
【0055】
また、走査制御部12は、線量モニタ4で検知される荷電粒子線Rのビーム強度を監視しておき、ビーム強度が所定の誤差範囲外に変動した場合には、当該変動を相殺して所与の照射量が実現されるように、走査磁石3による走査速度を調整する制御を更に行うこととしてもよい。すなわち、走査制御部12は、一定であるはずの上記ビーム強度が変動して所定の上限以上になった場合には、走査速度を大きくする方向に調整し、ビーム強度が所定の下限以下になった場合には、走査速度を小さくする方向に調整する。なお、上記の上限及び下限は、許容されるべきビーム強度の誤差範囲の上限・下限として設定される。このような制御により、荷電粒子線Rのビーム強度の変動も考慮に含め、正確な照射量での荷電粒子線Rの照射を継続することができる。そして、ビーム強度の変動に起因する治療中断を避けることができる。
【符号の説明】
【0056】
1…照射部、3…走査磁石(走査手段)、4…線量モニタ(ビーム強度検知手段)、7…ビーム位置モニタ(計測手段)、8…制御装置、9…走査ライン設定部、10…照射量設定部(照射量設定手段)、11…走査速度設定部、12…走査制御部(制御手段)、52…腫瘍(被照射物)、202…荷電粒子線照射プログラム、202b…走査ライン設定モジュール、202c…照射量設定モジュール(照射量設定機能)、202d…走査速度設定モジュール(走査速度設定機能)、202e…走査制御モジュール、L…走査ライン。
【技術分野】
【0001】
本発明は、荷電粒子線照射装置、荷電粒子線照射方法及び荷電粒子線照射プログラムに関する。
【背景技術】
【0002】
従来、被照射物(例えば患者体内の腫瘍)に陽子線などの荷電粒子線を照射して、被照射物に治療を施すための荷電粒子線照射装置が知られている。このような装置に関する技術として、例えば特許文献1には、被照射物への荷電粒子線の照射量を調整するために、荷電粒子線のビーム強度を変調することが記載されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2000−354637号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ここで、荷電粒子線のビーム強度は不安定なものであるので、これを正確に変調させるのは難しい。このため、特許文献1に記載されるようにビーム強度を制御量として荷電粒子線の照射量を調整する手法では、照射量を精度良く制御することができないという問題があった。
【0005】
また、荷電粒子線照射装置の適用分野では、例えば患者体内の腫瘍の放射線治療など、被照射物の周囲に荷電粒子線を照射することなく、被照射物のみに荷電粒子線を照射することが望ましいため、荷電粒子線を高精度に所望の被照射物に照射できることが求められている。
【0006】
本発明は、上記の問題点を解決するためになされたものであり、荷電粒子線の照射量を精度良く制御できる荷電粒子線照射装置、荷電粒子線照射方法及び荷電粒子線照射プログラムを提供することを目的とする。
【課題を解決するための手段】
【0007】
本発明者らは、鋭意研究を重ねた結果、荷電粒子線の照射量を精度良く制御するには、荷電粒子線の走査速度が影響していることを見出した。
【0008】
そこで、上記課題を解決するために、本発明に係る荷電粒子線照射装置は、被照射物に荷電粒子線を照射する荷電粒子線照射装置であって、被照射物へ照射される荷電粒子線を走査する走査手段と、走査手段により被照射物上を走査される荷電粒子線の走査ライン上の複数の目標走査位置のそれぞれにおける荷電粒子線の照射量を設定する照射量設定手段と、照射量設定手段により設定された照射量に基づき、目標走査位置のそれぞれにおける荷電粒子線の目標走査速度を設定する走査速度設定手段と、を備えることを特徴とする。
【0009】
同様に、上記課題を解決するために、本発明に係る荷電粒子線照射方法は、被照射物に荷電粒子線を照射する荷電粒子線照射方法であって、走査手段により被照射物上を走査される荷電粒子線の走査ライン上の複数の目標走査位置のそれぞれにおける荷電粒子線の照射量を設定する照射量設定ステップと、照射量設定ステップにおいて設定された照射量に基づき、目標走査位置のそれぞれにおける荷電粒子線の目標走査速度を設定する走査速度設定ステップと、を備えることを特徴とする。
【0010】
同様に、上記課題を解決するために、本発明に係る荷電粒子線照射プログラムは、被照射物に荷電粒子線を照射する荷電粒子線照射プログラムであって、走査手段により被照射物上を走査される荷電粒子線の走査ライン上の複数の目標走査位置のそれぞれにおける荷電粒子線の照射量を設定する照射量設定機能と、照射量設定機能により設定された照射量に基づき、目標走査位置のそれぞれにおける荷電粒子線の目標走査速度を設定する走査速度設定機能と、をコンピュータに実現させることを特徴とする。
【0011】
このような荷電粒子線照射装置、荷電粒子線照射方法及び荷電粒子線照射プログラムによれば、被照射物上の荷電粒子線の複数の目標走査位置のそれぞれにおける荷電粒子線の照射量が設定されると、この照射量に基づき、各目標走査位置における荷電粒子線の目標走査速度が設定される。荷電粒子線の走査速度は、従来、荷電粒子線の照射量の制御量として用いられていたビーム強度と比べて、安定させることが容易であるため、所望の値に正確に変調させることが可能である。したがって、目標走査速度を荷電粒子線の照射量を調整するための制御量として用いることによって、制御量を所望の値に正確に変調させることが可能となり、この結果、荷電粒子線の照射量を精度良く制御できる。
【0012】
また、荷電粒子線照射装置は、目標走査位置及び目標走査速度にしたがって、荷電粒子線が被照射物上にて走査されるよう走査手段を制御する制御手段を備えることが好適である。
【0013】
この構成により、安定した調整が可能な目標走査速度を、荷電粒子線の照射量を調整するための制御量として用いることによって、制御量を所望の値に正確に変調させることが可能となり、この結果、荷電粒子線の照射量を精度良く制御できる。
【0014】
また、荷電粒子線照射装置は、走査手段により被照射物上を走査された荷電粒子線の走査位置及び走査速度を計測する計測手段を備え、制御手段は、目標走査位置と計測手段により計測された走査位置との誤差が無くなるように、また、目標走査速度と計測手段により計測された走査速度との誤差が無くなるように、走査手段への制御入力を調整する位置速度フィードバック制御を行い、走査手段を制御することが好適である。
【0015】
この構成により、荷電粒子線の走査位置及び走査速度に基づき位置速度フィードバック制御を行って走査手段を制御するので、目標走査位置及び目標走査速度への追従性が向上し、荷電粒子線の照射量をより一層高精度に制御することができる。
【0016】
また、本発明の荷電粒子線照射装置は、荷電粒子線のビーム強度を検知するビーム強度検知手段を更に備え、制御手段は、ビーム強度検知手段で検知されたビーム強度が所定の誤差範囲外に変動した場合には、当該変動を相殺するように走査手段による走査速度を調整することが好ましい。
【0017】
この構成によれば、荷電粒子線のビーム強度が変動した場合にも、正確な照射量での荷電粒子線の照射を継続することができる。
【発明の効果】
【0018】
本発明に係る荷電粒子線照射装置、荷電粒子線照射方法及び荷電粒子線照射プログラムによれば、荷電粒子線の照射量を精度良く制御できる。
【図面の簡単な説明】
【0019】
【図1】本発明の一実施形態に係る荷電粒子線照射装置が適用される荷電粒子線治療装置を示す斜視図である。
【図2】図1の荷電粒子線照射装置を示す斜視図である。
【図3】荷電粒子線照射装置の制御系を示す図である。
【図4】走査制御部における位置・フィードバック制御を表すブロック線図である。
【図5】本実施形態の荷電粒子線照射装置において実行される処理を示すフローチャートである。
【図6】本発明に係る荷電粒子線照射プログラムの構成を示す図である。
【発明を実施するための形態】
【0020】
以下、図面を参照しつつ本発明の好適な実施形態について詳細に説明する。なお、以下の説明において同一又は相当要素には同一符号を付し、重複する説明は省略する。
【0021】
図1は、本発明の一実施形態に係る荷電粒子線照射装置が適用される荷電粒子線治療装置を示す斜視図であり、図2は、図1の荷電粒子線照射装置を示す斜視図であり、図3は、荷電粒子線照射装置の制御系を示す図である。
【0022】
図1に示すように、照射部1は、荷電粒子線照射装置100において、治療台105を取り囲むように設けられた回転ガントリ103に取り付けられ、この回転ガントリ103によって治療台105の回りに回転可能とされている。そして、治療台105の患者の体内の腫瘍52(被照射物)に対して、照射方向Aで荷電粒子線R(図3参照)を照射する。なお、図1には示されていないが、荷電粒子線照射装置100は、治療台105及び回転ガントリ103とは離れた位置に荷電粒子線Rを生成するサイクロトロンを備え、ビーム輸送系を介してサイクロトロンと照射部1とを連結している。
【0023】
この照射部1は、図3に示すように、スキャニング方式により、治療台105上の患者51の体内の腫瘍52に向けて荷電粒子線Rを連続照射する。具体的には、照射部1は、腫瘍52を深さ方向(Z方向または照射方向A)に複数層に分け、各層に設定された照射野Fにおいて走査ラインLに沿って荷電粒子線Rを走査速度Vで走査しながら連続照射(いわゆる、ラスタースキャニングあるいはラインスキャニング)する。つまり、照射部1は、腫瘍52に合わせた3次元の照射野を形成するため、腫瘍52を複数の層に分割してこれらの各層のそれぞれに対して平面スキャニングを行う。これにより、腫瘍52の3次元形状に合わせて荷電粒子線Rが照射されることとなる。
【0024】
荷電粒子線Rは、電荷をもった粒子を高速に加速したものであり、荷電粒子線Rとしては、例えば陽子線、重粒子(重イオン)線、電子線等が挙げられる。照射野Fは、例えば最大200mm×200mmの領域とされ、その外形が矩形状とされている。なお、照射野Fの形状は、種々の形状としてもよく、例えば腫瘍52の形状に沿った形状としても勿論よい。走査ラインLは、荷電粒子線Rを照射する予定線(仮想線)であり、上述の矩形状の照射野Fの場合、走査ラインLは、ラインスキャニングを例にとると、矩形波状に延在している。
【0025】
図2に示すように、照射部1は、荷電粒子線Rの照射方向Aに順に配列され、ビーム輸送ラインを介してサイクロトロンから入力された荷電粒子線Rが発散するのを抑え収束させるための四極磁石2と、荷電粒子線RをX方向とY方向に走査する走査磁石(スキャニングマグネット)(走査手段)3と、照射した荷電粒子線Rの線量(ビーム強度)を測定する線量モニタ(ビーム強度検知手段)4と、荷電粒子線Rを照射する前後に腫瘍52の位置・大きさ・形状を確認するためX線によりCT画像を撮影する際にX線を照射するX線管5と、照射野Fのビーム(加速粒子線)の平坦度合い(ビームが到達した奥行きの平坦度合い)を測定する平坦モニタ(フラットネスモニタ)6と、荷電粒子線Rが存在するX方向とY方向の位置を測定するビーム位置モニタ(計測手段)7と、を備えている。
【0026】
なお、図3に示すように、X方向及びY方向とは、Z方向(照射方向A)と直交し、さらに相互に直交する2方向であり、腫瘍52の照射野Fのなす平面上の位置を特定する2方向である。また、図3に示すように、走査磁石3は、荷電粒子線RのX方向の走査位置を制御するための一組の電磁石3aと、Y方向の走査位置を調整するための一組の電磁石3bと、を含んで構成される。ビーム位置モニタ7は、荷電粒子線RのX方向の走査位置を検知するためのグリッドワイヤ7aと、Y方向の走査位置を検知するためのグリッドワイヤ7bとを含んで構成される。
【0027】
特に本実施形態では、照射部1は、照射野F上の走査ラインLの各走査位置において、荷電粒子線Rの照射量を当該走査位置における走査速度に基づき調整するよう構成されている。ここで、本実施形態では、荷電粒子線Rの「照射量」は、腫瘍52に照射される荷電粒子の量を意味するものとして用いられる。
【0028】
以下、図3を参照して、照射部1の制御系について説明する。図3には、照射部1の制御系として、照射部1の走査磁石3と、ビーム位置モニタ7とが示され、さらに照射部1の外部に配置され、走査磁石3及びビーム位置モニタ7と通信可能に接続される制御装置8が示されている。
【0029】
制御装置8は、照射野Fにおける荷電粒子線Rの走査ラインL上の目標走査位置ごとに照射量を決定し、この決定された照射量を実現すべく走査軌道(目標走査位置及び目標走査速度)を決定する。そして、ビーム位置モニタ7により計測される荷電粒子線Rの走査軌道に基づき、走査磁石3の位置・速度フィードバック制御を行う。
【0030】
制御装置8は、図3に示すように、走査ライン設定部9、照射量設定部(照射量設定手段)10、走査速度設定部11、及び走査制御部(制御手段)12を備えて構成される。
【0031】
走査ライン設定部9は、走査磁石3により腫瘍52上にて走査される荷電粒子線Rの走査ラインLを設定する。より詳細には、走査ライン設定部9は、腫瘍52の照射野Fの形状に応じて、この照射野Fの全体にわたり荷電粒子線Rが照査されるように走査ラインLを設定する。例えば、照射野Fが矩形状の場合には、走査ラインLは矩形波状に形成される。走査ライン設定部9は、設定した走査ラインL上に複数の目標走査位置を設定する。この目標走査位置は、後述する走査制御部12により、位置フィードバック制御の目標値として用いられる。目標走査位置は、例えば走査ラインL上に等間隔で設定される。走査ライン設定部9は、目標走査位置の情報を照射量設定部10に送信する。
【0032】
照射量設定部10は、走査ライン設定部9により設定された走査ラインL上の各目標走査位置における荷電粒子線Rの照射量を決定する。荷電粒子線Rの照射量は、照射部1のオペレータの入力操作によって取得してもよいし、腫瘍の症状や照射野Fの深度などの諸条件に応じて、所与のデータベースなどを参照して設定してもよい。照射量設定部10は、各目標走査位置における荷電粒子線Rの照射量を設定すると、この情報を走査速度設定部11に送信する。
【0033】
走査速度設定部11は、照射量設定部10により設定された照射量に基づき、目標走査位置のそれぞれにおける荷電粒子線Rの目標走査速度を設定する。荷電粒子線Rのビーム強度が一定である場合、荷電粒子線Rの照射量と走査速度との間には一意の対応関係があるので、走査速度設定部11は、例えば照射量と走査速度とを対応付けたテーブルを保持しておき、所与の照射量に応じた走査速度を選択して、目標走査速度として設定する。ここでは、所与の照射量が大きいほど目標走査速度を遅く設定し、所与の照射量が小さいほど目標走査速度を速く設定すればよい。走査速度設定部11は、設定した目標走査速度を、目標走査位置と対応付けて目標走査軌道とし、走査制御部12に送信する。
【0034】
走査制御部12は、目標走査軌道(目標走査位置及び目標走査速度)にしたがって、荷電粒子線Rが腫瘍52上にて走査されるよう走査磁石3を制御する。走査制御部12は、具体的には、走査磁石3の磁力を調整する電流を発生する電源(図示せず)に対して走査磁石の制御入力として送信する電流強度を、位置・速度フィードバック制御する。より詳細には、目標走査位置とビーム位置モニタ7により計測された実際の荷電粒子線Rの走査位置との誤差が無くなるように、また、目標走査速度とビーム位置モニタ7により計測された実際の荷電粒子線Rの走査速度との誤差が無くなるように、位置・速度フィードバック制御を行い、走査磁石3への制御入力(電源の電流強度)を調整する。
【0035】
ここで、図4を参照して、走査制御部12における位置・フィードバック制御の詳細を説明する。図4は、走査制御部12における位置・フィードバック制御を表すブロック線図である。図4において破線で囲んだ領域が、走査制御部12の処理と対応している。
【0036】
まず、図4のブロック12aに示すように、時刻tにおける目標走査速度Vref(t)と、ビーム位置モニタ7により計測された1ステップ前の時刻t−1における走査速度V(t−1)との差分に定数kを乗じて、次の(1)式のように時刻tの走査速度V(t)を算出する。なお、走査速度V(t−1)は、例えばブロック12dに示すように、ビーム位置モニタ7により計測された1ステップ前の時刻t―1における荷電粒子線Rの走査位置P(t−1)を、時刻tについて一階微分して導出することができる。
v(t)=k・(Vref(t)−V(t−1))+V(t−1) (1)
【0037】
次に、図4のブロック12bに示すように、(1)式で算出した走査速度V(t)に時間幅Δt(時刻tとt−1との差分)を乗じて、次の(2)式のように時刻tにおける理論上の走査位置Pc(t)を算出する。なお、このPc(t)は、目標走査位置Pref(t)と対応する値である。
Pc(t)=V(t)・Δt+P(t−1) (2)
【0038】
次に、図4のブロック12cに示すように、(2)式で算出した理論上の走査位置Pc(t)と、ビーム位置モニタ7により計測された1ステップ前の時刻t−1における走査位置P(t−1)との差分に定数k’を乗じて、次の(3)式のように走査磁石3への制御入力I(t)を算出する。この制御入力は、具体的には走査磁石3の磁力を発生させるための電源(図示せず)の電流強度である。
I(t)=k’・(Pc(t)−P(t−1)) (3)
【0039】
(3)式で算出された電流強度に基づき走査磁石3の電源の電流強度が調整されると、この電流強度に応じて走査磁石3の磁力が調整され、この結果、荷電粒子線Rの走査位置が調整される。このときの走査位置P(t)がビーム位置モニタ7により計測され、ブロック12a及びブロック12cにフィードバックされる。
【0040】
なお、走査位置P、走査速度V、理論上の走査位置Pc、目標走査速度Vrefは、走査磁石3及びビーム位置モニタ7がそれぞれX、Y方向の制御及び計測を個別に行うよう構成されているため、それぞれX方向成分とY方向成分からなる2次元ベクトルとして構成されている。
【0041】
制御装置8は、物理的には、CPU(Central Processing Unit)、主記憶装置であるRAM(Random Access Memory)及びROM(Read Only Memory)、ハードディスク装置等の補助記憶装置、入力デバイスである入力キー等の入力装置、ディスプレイ等の出力装置、通信モジュールなどを有するコンピュータとして構成されている。図3,4に示した制御装置8の各機能は、CPU、RAM、ROM等のハードウェア上に所定のコンピュータソフトウェアを読み込ませることにより、CPUの制御のもとで入力装置、出力装置、通信モジュールを動作させるとともに、RAMやROM、補助記憶装置におけるデータの読み出し及び書き込みを行うことで実現される。
【0042】
次に、図5を参照して、本実施形態の照射部1において実行される処理を説明すると共に、本実施形態に係る荷電粒子線照射方法について説明する。
【0043】
まず、走査ライン設定部9により、走査磁石3により腫瘍52上にて走査される荷電粒子線Rの走査ラインLが設定される(S101)。走査ライン設定部9は、設定した走査ラインL上に、位置フィードバック制御の目標値として用いられる複数の目標走査位置を設定し、この目標走査位置の情報を照射量設定部10に送信する。
【0044】
次に、照射量設定部10により、ステップS101にて設定された目標走査位置のそれぞれにおける荷電粒子線Rの照射量が設定される(S102:照射量設定ステップ)。荷電粒子線Rの照射量は、照射部1のオペレータの入力操作によって取得してもよいし、腫瘍の症状や照射野Fの深度などの諸条件に応じて、所与のデータベースなどを参照して設定してもよい。照射量設定部10は、各目標走査位置における荷電粒子線Rの照射量を設定すると、この情報を走査速度設定部11に送信する。
【0045】
次に、走査速度設定部11により、ステップS102にて設定された照射量に基づき、目標走査位置のそれぞれにおける荷電粒子線Rの目標走査速度が設定される(S103:走査速度設定ステップ)。走査速度設定部11は、例えば照射量と走査速度とを対応付けたテーブルを保持しておき、所与の照射量に応じた走査速度を選択して、目標走査速度として設定する。走査速度設定部11は、設定した目標走査速度を、目標走査位置と対応付けて目標走査軌道とし、走査制御部12に送信する。
【0046】
そして、走査制御部12により、目標走査軌道(目標走査位置及び目標走査速度)にしたがって、荷電粒子線Rが腫瘍52上にて走査されるよう走査磁石3の制御が実行される(S104)。走査制御部12は、図4を参照して説明したように、目標走査軌道を制御入力とし、ビーム位置モニタ7により計測された実際の荷電粒子線Rの走査軌道(走査位置、走査速度)をフィードバック成分として、走査磁石3の磁力を調整する電源の電流強度を調整することにより、荷電粒子線Rの走査軌道の位置・速度フィードバック制御を行う。
【0047】
次に、図6を参照して、上述した照射部1において実行される一連の処理をコンピュータに実行させるための荷電粒子線照射プログラムについて説明する。図6に示すように、荷電粒子線照射プログラム202は、コンピュータが備える記憶媒体200に形成されたプログラム格納領域201内に格納されている。
【0048】
荷電粒子線照射プログラム202は、荷電粒子線照射処理を総括的に制御するメインモジュール202aと、走査ライン設定モジュール202bと、照射量設定モジュール(照射量設定機能)202cと、走査速度設定モジュール(走査速度設定機能)202dと、走査制御モジュール202eとを備えて構成される。
【0049】
走査ライン設定モジュール202b、照射量設定モジュール202c、走査速度設定モジュール202d、及び走査制御モジュール202eを実行させることにより実現される機能は、上述した図3の制御装置8の走査ライン設定部9、照射量設定部10、走査速度設定部11、及び走査制御部12の機能とそれぞれ同様である。
【0050】
なお、荷電粒子線照射プログラム202は、その一部又は全部が、通信回線等の伝送媒体を介して伝送され、他の機器により受信されて記録(インストールを含む)される構成としてもよい。また、荷電粒子線照射プログラム202は、その一部又は全部が、CD−ROM、DVD−ROM、フラッシュメモリなどの持ち運び可能な記憶媒体に格納された状態から、他の機器に記録(インストールを含む)される構成としてもよい。
【0051】
このような荷電粒子線照射装置、荷電粒子線照射方法及び荷電粒子線照射プログラムによれば、腫瘍52上の荷電粒子線Rの目標走査位置のそれぞれにおける荷電粒子線Rの照射量が設定されると、この照射量に基づき、各目標走査位置における荷電粒子線Rの目標走査速度が設定される。荷電粒子線Rの走査速度は、従来、荷電粒子線Rの照射量の制御量として用いられていたビーム強度と比べて、安定させることが容易であるため、所望の値に正確に変調させることが可能である。したがって、目標走査速度を荷電粒子線Rの照射量を調整するための制御量として用いることによって、制御量を所望の値に正確に変調させることが可能となり、この結果、荷電粒子線Rの照射量を精度良く制御できる。
【0052】
また、走査制御部12が、目標走査位置及び目標走査速度にしたがって、荷電粒子線Rが腫瘍52上にて走査されるよう走査磁石3を制御するため、安定した調整が可能な目標走査速度を、荷電粒子線Rの照射量を調整するための制御量として用いることによって、制御量を所望の値に正確に変調させることが可能となり、この結果、荷電粒子線Rの照射量を精度良く制御できる。
【0053】
また、走査制御部12は、目標走査位置とビーム位置モニタ7により計測された走査位置との誤差が無くなるように、また、目標走査速度とビーム位置モニタ7により計測された走査速度との誤差が無くなるように、走査磁石3への制御入力(電流強度)を調整する位置速度フィードバック制御を行い、走査磁石3を制御する。このため、荷電粒子線Rの走査位置及び走査速度に基づき位置速度フィードバック制御を行って走査磁石3を制御するので、目標走査位置及び目標走査速度への追従性が向上し、荷電粒子線Rの照射量をより一層高精度に制御することができる。
【0054】
以上、本発明に係る荷電粒子線照射装置、荷電粒子線照射方法及び荷電粒子線照射プログラムについて好適な実施形態を挙げて説明したが、本発明は上記実施形態に限られるものではない。走査制御部12による位置速度フィードバック制御は、図4に示したブロック線図の構成とは別の構成としてもよく、例えば、目標走査位置に基づく位置フィードバック制御と、目標走査速度に基づく速度フィードバック制御を個別に行い、両方の制御出力を合計した値を電流強度として走査磁石3の電源を調整してもよい。
【0055】
また、走査制御部12は、線量モニタ4で検知される荷電粒子線Rのビーム強度を監視しておき、ビーム強度が所定の誤差範囲外に変動した場合には、当該変動を相殺して所与の照射量が実現されるように、走査磁石3による走査速度を調整する制御を更に行うこととしてもよい。すなわち、走査制御部12は、一定であるはずの上記ビーム強度が変動して所定の上限以上になった場合には、走査速度を大きくする方向に調整し、ビーム強度が所定の下限以下になった場合には、走査速度を小さくする方向に調整する。なお、上記の上限及び下限は、許容されるべきビーム強度の誤差範囲の上限・下限として設定される。このような制御により、荷電粒子線Rのビーム強度の変動も考慮に含め、正確な照射量での荷電粒子線Rの照射を継続することができる。そして、ビーム強度の変動に起因する治療中断を避けることができる。
【符号の説明】
【0056】
1…照射部、3…走査磁石(走査手段)、4…線量モニタ(ビーム強度検知手段)、7…ビーム位置モニタ(計測手段)、8…制御装置、9…走査ライン設定部、10…照射量設定部(照射量設定手段)、11…走査速度設定部、12…走査制御部(制御手段)、52…腫瘍(被照射物)、202…荷電粒子線照射プログラム、202b…走査ライン設定モジュール、202c…照射量設定モジュール(照射量設定機能)、202d…走査速度設定モジュール(走査速度設定機能)、202e…走査制御モジュール、L…走査ライン。
【特許請求の範囲】
【請求項1】
被照射物に荷電粒子線を照射する荷電粒子線照射装置であって、
前記被照射物へ照射される前記荷電粒子線を走査する走査手段と、
前記走査手段により前記被照射物上を走査される前記荷電粒子線の走査ライン上の複数の目標走査位置のそれぞれにおける前記荷電粒子線の照射量を設定する照射量設定手段と、
前記照射量設定手段により設定された照射量に基づき、前記目標走査位置のそれぞれにおける前記荷電粒子線の目標走査速度を設定する走査速度設定手段と、
を備えることを特徴とする荷電粒子線照射装置。
【請求項2】
前記目標走査位置及び前記目標走査速度にしたがって、前記荷電粒子線が前記被照射物上にて走査されるよう前記走査手段を制御する制御手段を備えることを特徴とする、請求項1に記載の荷電粒子線照射装置。
【請求項3】
前記走査手段により前記被照射物上を走査された前記荷電粒子線の走査位置及び走査速度を計測する計測手段を備え、
前記制御手段は、前記目標走査位置と前記計測手段により計測された前記走査位置との誤差が無くなるように、また、前記目標走査速度と前記計測手段により計測された前記走査速度との誤差が無くなるように、前記走査手段への制御入力を調整する位置速度フィードバック制御を行い、前記走査手段を制御することを特徴とする、請求項2に記載の荷電粒子線照射装置。
【請求項4】
前記荷電粒子線のビーム強度を検知するビーム強度検知手段を更に備え、
前記制御手段は、
前記ビーム強度検知手段で検知された前記ビーム強度が所定の誤差範囲外に変動した場合には、当該変動を相殺するように前記走査手段による走査速度を調整することを特徴とする請求項1〜3の何れか1項に記載の荷電粒子線照射装置。
【請求項5】
被照射物に荷電粒子線を照射する荷電粒子線照射方法であって、
走査手段により前記被照射物上を走査される前記荷電粒子線の走査ライン上の複数の目標走査位置のそれぞれにおける前記荷電粒子線の照射量を設定する照射量設定ステップと、
前記照射量設定ステップにおいて設定された照射量に基づき、前記目標走査位置のそれぞれにおける前記荷電粒子線の目標走査速度を設定する走査速度設定ステップと、
を備えることを特徴とする荷電粒子線照射方法。
【請求項6】
被照射物に荷電粒子線を照射する荷電粒子線照射プログラムであって、
走査手段により前記被照射物上を走査される前記荷電粒子線の走査ライン上の複数の目標走査位置のそれぞれにおける前記荷電粒子線の照射量を設定する照射量設定機能と、
前記照射量設定機能により設定された照射量に基づき、前記目標走査位置のそれぞれにおける前記荷電粒子線の目標走査速度を設定する走査速度設定機能と、
をコンピュータに実現させるための荷電粒子線照射プログラム。
【請求項1】
被照射物に荷電粒子線を照射する荷電粒子線照射装置であって、
前記被照射物へ照射される前記荷電粒子線を走査する走査手段と、
前記走査手段により前記被照射物上を走査される前記荷電粒子線の走査ライン上の複数の目標走査位置のそれぞれにおける前記荷電粒子線の照射量を設定する照射量設定手段と、
前記照射量設定手段により設定された照射量に基づき、前記目標走査位置のそれぞれにおける前記荷電粒子線の目標走査速度を設定する走査速度設定手段と、
を備えることを特徴とする荷電粒子線照射装置。
【請求項2】
前記目標走査位置及び前記目標走査速度にしたがって、前記荷電粒子線が前記被照射物上にて走査されるよう前記走査手段を制御する制御手段を備えることを特徴とする、請求項1に記載の荷電粒子線照射装置。
【請求項3】
前記走査手段により前記被照射物上を走査された前記荷電粒子線の走査位置及び走査速度を計測する計測手段を備え、
前記制御手段は、前記目標走査位置と前記計測手段により計測された前記走査位置との誤差が無くなるように、また、前記目標走査速度と前記計測手段により計測された前記走査速度との誤差が無くなるように、前記走査手段への制御入力を調整する位置速度フィードバック制御を行い、前記走査手段を制御することを特徴とする、請求項2に記載の荷電粒子線照射装置。
【請求項4】
前記荷電粒子線のビーム強度を検知するビーム強度検知手段を更に備え、
前記制御手段は、
前記ビーム強度検知手段で検知された前記ビーム強度が所定の誤差範囲外に変動した場合には、当該変動を相殺するように前記走査手段による走査速度を調整することを特徴とする請求項1〜3の何れか1項に記載の荷電粒子線照射装置。
【請求項5】
被照射物に荷電粒子線を照射する荷電粒子線照射方法であって、
走査手段により前記被照射物上を走査される前記荷電粒子線の走査ライン上の複数の目標走査位置のそれぞれにおける前記荷電粒子線の照射量を設定する照射量設定ステップと、
前記照射量設定ステップにおいて設定された照射量に基づき、前記目標走査位置のそれぞれにおける前記荷電粒子線の目標走査速度を設定する走査速度設定ステップと、
を備えることを特徴とする荷電粒子線照射方法。
【請求項6】
被照射物に荷電粒子線を照射する荷電粒子線照射プログラムであって、
走査手段により前記被照射物上を走査される前記荷電粒子線の走査ライン上の複数の目標走査位置のそれぞれにおける前記荷電粒子線の照射量を設定する照射量設定機能と、
前記照射量設定機能により設定された照射量に基づき、前記目標走査位置のそれぞれにおける前記荷電粒子線の目標走査速度を設定する走査速度設定機能と、
をコンピュータに実現させるための荷電粒子線照射プログラム。
【図1】



【図2】
【図3】
【図4】
【図5】

【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2012−45166(P2012−45166A)
【公開日】平成24年3月8日(2012.3.8)
【国際特許分類】
【出願番号】特願2010−189816(P2010−189816)
【出願日】平成22年8月26日(2010.8.26)
【出願人】(000002107)住友重機械工業株式会社 (2,241)
【Fターム(参考)】
【公開日】平成24年3月8日(2012.3.8)
【国際特許分類】
【出願日】平成22年8月26日(2010.8.26)
【出願人】(000002107)住友重機械工業株式会社 (2,241)
【Fターム(参考)】
[ Back to top ]