
荷電粒子線装置、及び荷電粒子線のランディング角度の計測補正方法
【課題】スキャン歪や荷電粒子線のランディング角度のばらつきに起因する測長値器差を低減し、荷電粒子線の絶対的な傾斜角度を高精度に測定する。
【解決手段】試料面上に形成されたピラミッドパターン90のSEM画像の撮像する際に、スキャン方向及び/又は試料5の搭載向きを、正および逆向きに変えた像を取得し、それぞれの結果を画像間で平均化することにより荷電粒子線の傾斜角度を高精度に測定する。これによりスキャン歪の影響や荷電粒子線のランディング角度のばらつきに起因する測長値器差を低減する。
【解決手段】試料面上に形成されたピラミッドパターン90のSEM画像の撮像する際に、スキャン方向及び/又は試料5の搭載向きを、正および逆向きに変えた像を取得し、それぞれの結果を画像間で平均化することにより荷電粒子線の傾斜角度を高精度に測定する。これによりスキャン歪の影響や荷電粒子線のランディング角度のばらつきに起因する測長値器差を低減する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、半導体装置の回路パターン等の微少な寸法を計測する荷電粒子線装置、及び荷電粒子線のランディング角度の計測補正方法に関する。
【背景技術】
【0002】
近年の半導体装置の回路パターンの微小化に伴い、そのパターン寸法を計測する半導体測長装置に求められる計測精度も高まってきている。とりわけ、計測装置間での測長値器差の精度は、年々その要求が厳しくなってきている。
【0003】
半導体測長装置では、集束させた電子線(電子ビーム)を観察・計測対象の試料に照射して試料面上で2次元的に走査し、その際に試料から発生する2次電子を検出して得られたSEM(Scanning Electron Microscope:走査電子顕微鏡)画像上でパターン寸法の計測箇所を指定することにより、そのパターン寸法を該当部分の検出信号波形を用いてSEM画像の倍率を基に算出して測定する構成になっている。
【0004】
ところで、半導体測長装置のようなSEM画像すなわち荷電粒子線像を取得する荷電粒子線装置にあっては、画像取得の際、試料に対して荷電粒子線としての電子線が斜めに入射すると、それにより得られる試料の荷電粒子線像は、その際の試料に対する荷電粒子線の入射角度、すなわち荷電粒子線のランディング角度に応じて変化する。この場合、荷電粒子線のランディング角度は、試料の法線と荷電粒子線のビーム光軸とのなす角度を示す。
【0005】
したがって、半導体測長装置を用いた寸法計測では、上述したようにSEM画像を基に計測するため、同じ試料の、同じパターンの寸法計測であっても、試料に対する電子線の入射角度の違いによってそのSEM画像自体が変化してしまい、パターン寸法の測定値も変化してしまう。そこで、半導体測長装置では、通常、電子線を故意に偏向していない状態では、SEM画像の取得に当たって、パターンが形成された試料面に対して電子線が垂直に入射するように設計されている。
【0006】
しかしながら、半導体測長装置を含む荷電粒子線装置においては、荷電粒子線を偏向,収束する荷電粒子光学系の光軸とこの荷電粒子光学系により偏向された荷電粒子線のビーム光軸とのなす角度で規定される荷電粒子線の傾斜角度について、0.1°以下の微小な傾斜角度を測定する術がなかった。このため、前述した電子線を故意に偏向していない状態であっても、電子線を偏向,収束する電子光学系の光軸方向に沿って、電子線が試料面に対して垂直に照射されているか否かについては、実際には確認できていない。これにより、各装置では、電子線すなわち荷電粒子線を偏向していない状態でも、荷電粒子線には電子光学系すなわち荷電粒子光学系の光軸に対して微小な傾斜が発生しており、さらにこの傾斜量は装置間で異なることから、この微小な傾斜による測長値器差が発生している。
【0007】
その一方で、従来、電子線すなわち荷電粒子線の傾斜角度を計測補正する手法としては、特許文献1に記載されているように、形状既知の多面体構造物、例えば形状既知のピラミッドパターンが形成された試料をキャリブレーションサンプルとして用い、そのキャリブレーションパターンとしてのピラミッドパターンのSEM画像を取得し、このSEM画像上でのピラミッドパターンの幾何学的な変形を基に、このSEM画像を取得した際における試料に対する荷電粒子線の入射角度、すなわち荷電粒子線のランディング角度を推定し、この推定したランディング角度を基に、試料に対するランディング角度それぞれに対応した荷電粒子線の傾斜角度を補正する手法がある。
【0008】
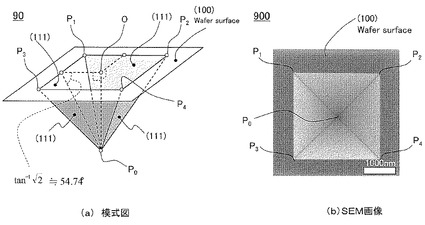
図9は、キャリブレーションパターンの一実施例としてのピラミッドパターンの説明図である。図9(a)は、ピラミッドパターンの3次元形状の模式図を、図9(b)は、図9(a)に示したピラミッドパターンが形成された試料のピラミッドパターン部分のSEM画像をそれぞれ示す。
【0009】
図9(a)において、ピラミッドパターン90は、シリコン(Si)ウェーハを結晶異方性エッチングして露出させた(111)面と、この(111)面と等価な結晶面方向を有する3つの面とを備えた四角錐形状の凹部パターンで形成されている。そのため、ピラミッドパターン90の各面同士がなす角は既知となる。図中、P0〜P4は、ピラミッドの各頂点を表わし、頂点P0はピラミッドパターン90の底頂部に該当し、頂点P1〜P4はピラミッドパターン90の開口部における各角部に該当する。ピラミッドパターン90の各面P0P1P2,P0P2P4,P0P4P3,P0P3P1は、ウェーハ面としてのシリコンの(100)面に対しての傾斜角がそれぞれtan−1(√2)≒54.74°になっている。
【0010】
なお、キャリブレーションパターンとしてのピラミッドパターン90は、四角錐形状の凹部パターンではなく四角錐形状の凸部パターンであってもよく、さらには多面体構造物のパターン形状自体も図示の四角錐形状(ピラミッド形状)に限られるものではなく、例えば角錐台形状、等であってもよい。
【0011】
図9(b)に示すように、図9(a)に示したピラミッドパターン90のトップダウンSEM画像(図示の例では、ピラミッドパターン90が形成されたウェーハ面を垂直上方から観測したSEM画像)900では、検出信号の値変化に基づき、ピラミッドパターン90の4つの谷線は、頂点P0とその余の頂点P1〜P4とを結ぶ直線P0P1,P0P2,P0P3,P0P4で、ピラミッドパターン90の開口部はピラミッドパターン90の各面P0P1P2,P0P2P4,P0P4P3,P0P3P1とウェーハ面との交線、すなわち線分P1P2,P2P4,P4P3,P3P1で現れる。
【0012】
そこで、特許文献1には、この形状既知のピラミッドパターンが形成された試料を予め設定した所望の観察方向から観察することによって取得したSEM画像上でのピラミッドパターンの幾何学的な変形を基に、その際における試料に対しての電子線の入射角度を推定し、この推定した入射角度が設定した所望の観察方向に該当する設定値になるように、例えば電子線の偏向を調整する等して、電子線の傾斜角度を試料の観察方向に合わせる方法が記載されている。
【0013】
また、特許文献2には、特許文献1に記載の手法を用いて、形状既知の多面体パターンが形成された試料の多面体パターン部分のSEM画像を取得し、そのSEM画像上での多面体パターンの幾何学的な変形を基に、試料に対する電子線の入射角度を推定するとともに、別装置でも、この推定に用いた同じ試料を用いてその多面体パターン部分のSEM画像を取得し、そのSEM画像上での多面体パターンの幾何学的な変形を基に、試料に対する電子線の入射角度を推定することにより、装置間で試料に対する電子線の入射角度を一致させるようにそれぞれの電子線の傾斜角度を対応付けることにより、装置間での電子線の傾斜角度の違いによる測長値器差を補正する方法が記載されている。
【先行技術文献】
【特許文献】
【0014】
【特許文献1】特開2005−183369
【特許文献2】特開2007−187538
【発明の概要】
【発明が解決しようとする課題】
【0015】
しかしながら、上述した特許文献1,2に記載されている方法による電子線の傾斜角度の計測、及び装置間の電子線の傾斜角度の違いによる測長値器差の補正では、次に述べる2つの問題がそれぞれの実用を依然と困難にしている。
【0016】
まず、第1の問題として、SEM画像の取得のための試料面上での電子線の2次元的な走査にあって、前述した装置間の電子線の傾斜角度の違いによる測長値器差の問題とは別に、電子線の傾斜角度を2次元平面内で連続変化させることにより取得した2次電子の検出信号自体の中にスキャン歪が内包されてしまっているという問題がある。なお、ここでのスキャン歪は、電子線を走査するためのスキャン信号が受ける外乱やスキャン信号自体の応答速度の変化等から、試料の取得したSEM画像が歪んでしまう現象を指す。
【0017】
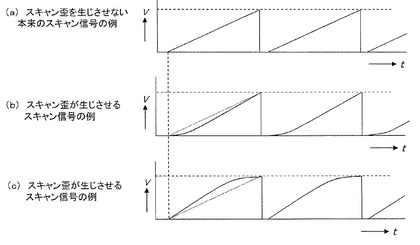
図10は、スキャン歪を生じさせるスキャン信号の例の説明図である。
図10(a)は、スキャン歪を生じさせない本来のスキャン信号の例を示し、図10(b),(c)は、外乱や信号自体の応答速度の変化等からスキャン歪を生じさせてしまうスキャン信号の例を示す。
【0018】
例えば、図10(b)に示したスキャン信号は、図10(a)に示したようなスキャン信号の値の大きさVと時間tとの関係からなる本来のスキャン信号に対して、スキャン始点を含むスキャン前半側では電子線のスキャン速度が遅くなり、スキャン終点を含むスキャン後半側では電子線のスキャン速度が速くなる信号変化が起きるスキャン信号の一例を示したものである。また、図10(c)に示したスキャン信号は、本来のスキャン信号に対して、スキャン始点を含むスキャン前半側では電子線のスキャン速度が速くなり、スキャン終点を含むスキャン後半側では電子線のスキャン速度が遅くなる信号変化が起きているスキャン信号の一例を示したものである。
【0019】
極端な例として、図10(b),(c)に示したようなスキャン信号により試料のSEM画像を取得した場合、その取得したSEM画像にはスキャン歪が生じ、本来の形状が正方形状のパターンがこのスキャン歪により台形に見えたりする。このスキャン歪については、装置内である程度の補正を行ってはいるものの、その全てをキャンセルすることはできない。そのため、装置で取得したピラミッドパターンのSEM画像には、装置自体による多少のスキャン歪が含まれているので、このスキャン歪を含んでいるSEM画像上でのピラミッドパターンの幾何学的な変形を基に、このSEM画像を取得した際における試料に対する電子線の入射角度すなわちランディング角度を推定し、この推定した電子線のランディング角度に対応させて電子線の傾斜角度を推定して求めても、その計測結果には誤差が発生していることになる。
【0020】
次に、第2の問題として、このスキャン歪の影響の大きさは装置毎で異なるため、装置間のキャリブレーション(較正)が難しいという問題がある。例えば、特許文献1でキャリブレーションサンプルとして使用している、図9に示した形状既知のピラミッドパターン90は、シリコンウェーハの結晶方位面((100)面)に対して垂直に形成されるが、このシリコンウェーハの結晶方位面((100)面)自体は、ウェーハ面に対して必ずしも並行ではない。これは、シリコンのインゴットからウェーハを切り出す際に、ウェーハ面と結晶方位面((100)面)とが多少ずれてしまうためである。通常、このずれ量は0.2°以下となっているが、その大きさは0.05°以下の精度で電子線の傾斜角度を計測する半導体測長装置にとっては大き過ぎる値である。
【0021】
したがって、ピラミッドパターン90を用いて装置の電子線の試料に対する入射角度すなわち電子線のランディング角度を測定すると、実際には、電子線の傾斜角度と、このピラミッドパターン90が形成されたウェーハ面自体の傾斜角度とを合わせたものが、測定結果となる。すなわち、使用するキャリブレーションサンプルの違いによって、電子線の傾斜角度の計測結果が異なることになる。
【0022】
この結果、特許文献1に記載の方法では、上述したスキャン歪の影響やキャリブレーションサンプルのウェーハ面の結晶方位面とのずれの影響により、電子線の傾斜角度のみを計測することはできず、試料に対する相対角度のみの計測となる。
【0023】
これでは、特許文献2のように、装置間のキャリブレーションを行っても、装置毎のスキャン歪の影響が異なるので、ある傾斜角度で合わせこむことしかできない。さらに、キャリブレーションサンプルのウェーハ面の結晶方位面とのずれは試料毎に異なるので、各装置とも同じキャリブレーションサンプルを用いて計測しなくてはならず、1つのキャリブレーションサンプルを装置間でキャリブレータとして持ち回りしなければならない。
【0024】
本発明は、上述した問題点を鑑み、半導体装置の回路パターン等の微少な寸法を計測する荷電粒子線装置に係り、スキャン歪や荷電粒子線のランディング角度のばらつきに起因する測長値器差を低減し、荷電粒子線の絶対的な傾斜角度を高精度に測定することできるとともに、装置間のキャリブレーションにおける作業性の向上をはかった荷電粒子線装置、及び荷電粒子線のランディング角度の計測補正方法を提供することを目的とする。
【課題を解決するための手段】
【0025】
本発明は、試料面上に形成された、形状が既知の多面体構造物の荷電粒子線画像を撮像し、その取得した荷電粒子線画像上の多面体構造物の幾何学的な変形を基に、この荷電粒子線画像を取得した際における試料に対する荷電粒子線のランディング角度を推定し、この推定した荷電粒子線のランディング角度を基に、荷電粒子線のランディング角度それぞれに対応した荷電粒子線の傾斜角度を推定する荷電粒子線装置、又は荷電粒子線のランディング角度の計測補正方法であって、
(1) 試料面上に形成された、形状が既知の多面体構造物の荷電粒子線画像を撮像する際に、スキャン方向を相互に反対向きに変えた多面体構造物の荷電粒子線画像を取得し、これらスキャン方向が相互に反対向きの多面体構造物の荷電粒子線画像それぞれの画像の結果をこれら画像間で平均化することにより、スキャン歪の影響や荷電粒子線のランディング角度のばらつきに起因する測長値器差を低減し、この平均化した画像結果を基に荷電粒子線の傾斜角度を高精度に測定すること、
(2) 試料面上に形成された、形状が既知の多面体構造物の荷電粒子線画像を撮像する際に、試料の搭載向きを相互に反対向きに変えてロードし、ロード方向を相互に反対向きに変えた多面体構造物の荷電粒子線画像を取得し、これらロード方向が相互に反対向きの多面体構造物の荷電粒子線画像それぞれの画像の結果をこれら画像間で平均化することにより、スキャン歪の影響や荷電粒子線のランディング角度のばらつきに起因する測長値器差を低減し、この平均化した画像結果を基に荷電粒子線の傾斜角度を高精度に測定すること、
を特徴する。
【発明の効果】
【0026】
本発明によれば、スキャン歪の影響を抑制し、キャリブレーションパターンとしての形状が既知の多面体構造物が形成された試料面自体の傾斜をキャンセルすることができるので、試料面に対する荷電粒子線のランディング角度を荷電粒子線の絶対的な傾斜角度によって高精度に計測することが可能となり、スキャン歪や荷電粒子線のランディング角度のばらつきに起因する測長値器差を低減させることができる。
【図面の簡単な説明】
【0027】
【図1】本発明の荷電粒子線装置の一実施の形態としての、測長機能を備えた走査電子顕微鏡の概略構成図である。
【図2】スキャン歪の影響を模式的に示した説明図である。
【図3】イメージシフト量と電子線の傾斜角度との関係の特性図である。
【図4】キャリブレーションサンプルの観察時のパターン断面図である。
【図5】スキャン歪による測定誤差抑制処理のフローチャートである。
【図6】ランディング角度のパターン傾斜による測定誤差抑制処理のフローチャートである。
【図7】メンテナンス補正処理の一実施例のフローチャートである。
【図8】メンテナンス補正処理の別の実施例のフローチャートである。
【図9】キャリブレーションパターンの一実施例としてのピラミッドパターンの説明図である。
【図10】スキャン歪を生じさせるスキャン信号の例の説明図である。
【発明を実施するための形態】
【0028】
以下、本発明に係る荷電粒子線装置及びビームランディング角度の計測補正方法の一実施の形態について、測長機能を備えた走査電子顕微鏡(測長SEM:critical dimension SEM)を例に、図面とともに説明する。
【0029】
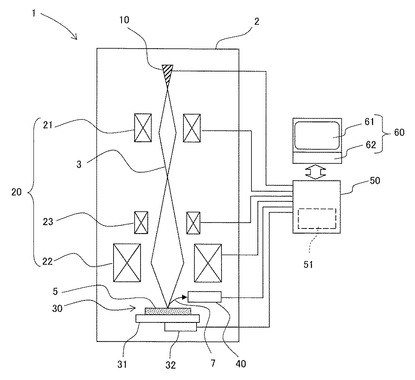
図1は、本発明の荷電粒子線装置の一実施の形態としての、測長機能を備えた走査電子顕微鏡の概略構成図である。
【0030】
走査電子顕微鏡1は、装置筺体2に、電子銃10と、電子光学系20と、試料室30と、二次電子検出器40とを備え、これら各部を処理装置50により制御する構成になっている。
【0031】
電子銃10は、荷電粒子線銃として、荷電粒子の一種である電子を発生し、荷電粒子線としての電子線3を放出する。電子光学系20は、荷電粒子光学系として、集束レンズ21,対物レンズ22,偏向器23を含む。電子銃10から放出される電子線3は、電子光学系20の集束レンズ21,対物レンズ22によって集束され、偏向器23によって偏向されて、試料室30内に配置された試料面上に照射される。
【0032】
試料室30には、電子線3が照射される観察・計測対象の試料が収容される。この観察・計測対象の試料の中には、図9に示したキャリブレーションサンプルとしての試料5も含まれる。試料室30には、試料5を含む観察・計測対象の試料が搭載されるステージ31が設けられ、ステージ31には、ステージ機構32が付設されている。ステージ機構32は、ステージ移動機構として、ステージ31の位置を試料室30内で移動変位させ、試料面上における電子線3の照射位置や観察視野を移動させることができる。また、本実施の形態では、ステージ機構32は、ステージ回動機構として、ステージ31の向きを試料室30内で回動し、ステージ31に搭載されている試料の向きを逆向きも含め、試料を回転して変えることができる。なお、図1においては、ステージ31には図9に示したキャリブレーションサンプルとしての試料5が搭載されている状態が示されている。
【0033】
電子線3の照射によって試料から放出される荷電粒子の二次電子7は、荷電粒子検出器としての二次電子検出器40によって輝度信号で検出される。検出信号は、二次電子検出器40から処理装置50に供給され、この検出信号を基に、処理装置50によって試料面上における電子線3の照射領域のSEM画像が生成される。
【0034】
処理装置50は、例えばコンピュータ装置等によって構成され、装置各部と接続されている一方、ユーザーインターフェースとしての入出力装置60とも接続されている。入出力装置60は、表示機器としてのディスプレイ61と、マウス,キーボード等といった操作機器62とを含む。
【0035】
処理装置50は、上述したSEM画像の取得をはじめとする各処理を走査電子顕微鏡1に行わせるため、その各部を制御する。
【0036】
例えば、処理装置50は、測定倍率の調整やフォーカス調整を行うため、電子光学系20の集束レンズ21や対物レンズ22を制御する。また、試料5を含めた観察・計測対象の試料に対する電子線3の入射角度、すなわちランディング角度が予め設定された観察方向に該当する設定値となるように、偏向器23を制御して電子線3の偏向いわゆるビームチルトを行う。
【0037】
その一方で、処理装置50は、試料上での電子線3の照射位置や観察視野を移動させるため、ステージ機構32を制御して、ステージ31を試料室30内で2次元的又は3次元的に移動させる。また、処理装置50は、このステージ機構32によるステージ移動を行わずに、電子線3の照射位置や観察視野を試料上での観測点に対して正確に移動させるため、電子線3の試料上での照射位置(走査位置)を偏向器23によって変えるイメージシフトも行う。
【0038】
処理装置50は、このような試料に対する電子線3の照射走査に対応して二次電子検出器40から供給される検出信号を基に、試料上における電子線3の照射領域のSEM画像を生成し、この生成したSEM画像データやその生成に用いた前述した測定倍率等の観察条件データ,検出信号データ等を、その観察した試料と対応付けて記憶部51に保存・蓄積したり、入出力装置60のディスプレイ61に表示出力したりする。
【0039】
加えて、処理装置50は、入出力装置60の操作機器62及びディスプレイ61を用いて、SEM画像上でパターン寸法の計測箇所が指定されると、このSEM画像の該当部分の検出信号データ等を用いてSEM画像の倍率データを基に計測箇所のパターン寸法を算出して測定し、この測定寸法データや計測箇所の指定データ等をこのSEM画像や観察した試料に対応付けてその記憶部51に保存・蓄積したり、入出力装置60のディスプレイ61に表示出力したりする。
【0040】
さらに、本実施の形態に係る走査電子顕微鏡1では、処理装置50は、特許文献1に記載されている電子線3のランディング角度の計測補正処理を行うために、電子線3のランディング角度計測部,ランディング角度補正部として機能する。
【0041】
すなわち、処理装置50は、図9に示したような形状既知のピラミッドパターン90が形成された試料5を用い、電子線3のランディング角度の計測補正処理の実行が指示されたときは、まず、電子線3のランディング角度計測部として、設定された所望の観察方向に電子線3をビームチルトして試料5のピラミッドパターン90部分をイメージシフトで観察することにより、そのSEM画像を取得する。そして、このSEM画像上でのピラミッドパターン90の幾何学的な変形を基に、その際における試料5に対する電子線3のランディング角度を推定する。なお、この電子線3のランディング角度の計測補正処理の実行指示は、入出力装置60の操作機器62の操作、又は予め設定された実行条件の充足に基づき行われる。また、所望の観察方向の設定は、電子線3のランディング角度の設定により行われる。
【0042】
具体的に、所望の観察方向に該当する電子線3のランディング角度が設定値として設定されると、処理装置50は、例えば、予め記憶部51に記憶されている電子線3のランディング角度と電子線3の傾斜角度との関係データテーブルを基に、設定値の電子線3のランディング角度に対応する電子線3の傾斜角度になるように電子線3のビームチルトを偏向器23により行って、ピラミッドパターン90部分のSEM画像をイメージシフトで取得する。
【0043】
そして、処理装置50は、電子線3のランディング角度の計測を、例えば、電子線3をビームチルトしていない状態(電子線3が試料5に垂直に入射される状態)でピラミッドパターン90をイメージシフトすることにより得られるSEM画像上のピラミッドパターン90に係る画像データと、偏向器23によって設定値に対応して電子線3をビームチルトして取得したSEM画像上のピラミッドパターン90に係る画像データとを用いて、この設定値に対応して取得したSEM画像上でのピラミッドパターン90の幾何学的な変形を基に、この設定値に対応して取得したSEM画像の電子線3のランディング角度を推定する。
【0044】
処理装置50は、この設定値に対応して取得したSEM画像の電子線3のランディング角度を推定すると、電子線3のランディング角度補正部として、例えば、この設定値に対応した電子線3の傾斜角度がこの推定された電子線3のランディング角度に対応する電子線3の傾斜角度になるように、記憶部51の関係データテーブルに記憶されている電子線3のランディング角度と電子線3の傾斜角度との対応関係を補正し、実際の電子線3のランディング角度が設定した電子線3のランディング角度になるように合わせる。
【0045】
加えて、処理装置50は、これら各種処理の設定や実行等を選択し又は指示するためのGUI(Graphical User Interface)画面を、入出力装置60のディスプレイ61にOSD(On-Screen Display)表示するようにもなっている。
【0046】
さらに、本実施の形態に係る走査電子顕微鏡1では、処理装置50が、電子線3のランディング角度計測部,ランディング角度補正部として、上述したようにキャリブレーションサンプルとしての試料5を用いて、上述した電子線3のランディング角度の計測補正処理を行うに際して、同じく図9に示したピラミッドパターン90が形成された試料5をキャリブレーションサンプルとして用いて、スキャン歪によるランディング角度の測定誤差を抑制するスキャン歪測定誤差抑制処理、及びピラミッドパターン90が形成された試料面の傾斜によるランディング角度の測定誤差を抑制するパターン傾斜測定誤差抑制処理を行う。
【0047】
処理装置50は、スキャン歪測定誤差抑制処理を行い、上述した電子線3のランディング角度の計測部により計測されるランディング角度、及びランディング角度補正部により補正される電子線3のランディング角度と電子線3の傾斜角度との対応関係を、スキャン歪の影響による測定誤差を抑制した電子線3のランディング角度に基づいたものにするとともに、パターン傾斜測定誤差抑制処理を行い、キャリブレーションサンプルとしての試料5の試料面とそのピラミッドパターン90との間に生じた傾斜の影響による測定誤差を抑制して、電子線3の絶対的な傾斜角度のみに基づくものにする。
【0048】
ここでは、電子線3の絶対的な傾斜角度とは、電子線を故意に偏向していない状態での電子線放出方向、すなわち電子光学系20の光軸方向をz軸とし、このz軸に直交し、かつ互いに直交したx軸及びy軸を有する絶対座標系上での、電子光学系20の光軸すなわちz軸に対する電子線3の光軸の傾斜角度を指す。
【0049】
次に、本実施の形態による走査電子顕微鏡1において、処理装置50が行うランディング角度のスキャン歪による測定誤差抑制処理、及びランディング角度のパターン傾斜による測定誤差抑制処理について説明する。
【0050】
本実施の形態による走査電子顕微鏡1では、処理装置50がランディング角度計測部,ランディング角度補正部として機能し、特許文献1に記載されている電子線3のランディング角度の計測補正処理を行い、キャリブレーションパターンとしてのピラミッドパターン90に係るSEM画像を取得する際に、予めランディング角度のスキャン歪による測定誤差抑制処理、及びキャリブレーションパターンのパターン傾斜による測定誤差抑制処理を行うことにより、SEM画像に発生するスキャン歪による測定誤差の問題、及びパターン傾斜による測定誤差の問題を解決して、キャリブレーションサンプルの試料面に対する荷電粒子線のランディング角度を荷電粒子線の絶対的な傾斜角度によって高精度に制御することができる。
【0051】
<スキャン歪によるランディング角度の測定誤差抑制処理>
まず、スキャン歪によるランディング角度の測定誤差抑制処理について説明する。
スキャン歪は、電子線3を走査するためのスキャン信号が受ける外乱や,スキャン信号自体の応答速度の変化等から、試料の観察部分がその取得したSEM画像においては歪んでしまう現象である。
【0052】
図2は、キャリブレーションサンプルとして図9に示したピラミッドパターン90が形成されている試料5を用いた場合を例に、スキャン歪の影響を模式的に示した説明図である。なお、ここでは、説明簡便のため、ピラミッドパターン90が形成された試料面は、シリコンウェーハの結晶方位面((100)面)に合致しているものとして説明する。図中の矢印は、電子線3のラスタースキャン方向を表わす。
【0053】
図2(a)は、スキャン歪が生じていない場合の、図9に示した試料5のピラミッドパターン90部分をイメージシフトで観察したトップダウンSEM画像900である。
【0054】
この場合、ピラミッドパターン90とウェーハ面との交線P1P2,P2P4,P4P3,P3P1で表れるピラミッドパターン90の開口部は正方形状に現れ、頂点P0とその他の頂点P1〜P4とを結ぶ直線P0P1,P0P2,P0P3,P0P4で表れるピラミッドパターン90の4つの谷線は、試料面に正方形状に表れた開口部の対角線として現れる。したがって、ピラミッドパターン90の底頂部P0は、正方形状に現れた開口部の中央(中心)Oに現れる。
【0055】
これに対して、図2(b)は、スキャン歪が生じている場合の、図9に示した試料5のピラミッドパターン90部分を、イメージシフトによる電子線3のスキャン方向をラスターローテーションにより変更して、それぞれローテーション角度RRを変えて観察したトップダウンSEM画像901(RR00),901(RR180),901(RR90),901(RR270)である。
【0056】
SEM画像901(RR00)はローテーション角度RRが0°のトップダウンSEM画像を、SEM画像901(RR180)はローテーション角度RRが180°のトップダウンSEM画像を、SEM画像901(RR90)はローテーション角度RRが90°のトップダウンSEM画像を、SEM画像901(RR270)はローテーション角度RRが270°のトップダウンSEM画像をそれぞれ示す。
【0057】
そこで、図2(a)に示したスキャン歪が生じていない場合のSEM画像900のピラミッドパターン90の底頂部P0を基に、図2(b)に示したスキャン歪が生じている場合のSEM画像901(RR00),901(RR180),901(RR90),901(RR270)それぞれのピラミッドパターン90の底頂部P0を比較してみると、次のようになる。
【0058】
SEM画像901(RR00)の場合、その底頂部P0(RR00)は、画像上の座標系のx軸方向(電子光学系20の光軸方向を基準とした絶対座標系上のx軸方向に対応する)に係り、SEM画像900の底頂部P0の位置よりも、画像上の横方向に、左側にオフセットして現れている。一方、画像上の座標系のy軸方向(電子光学系20の光軸方向を基準とした絶対座標系上のy軸方向に対応する)に係っては、その底頂部P0(RR00)は、SEM画像900の底頂部P0の位置に対し、画像上の縦方向に、上下に顕著なオフセットは見受けられない。
【0059】
SEM画像901(RR180)の場合、その底頂部P0(RR180)は、画像上の座標系のx軸方向に係り、SEM画像900の底頂部P0の位置よりも、画像上の横方向に、SEM画像901(RR00)の場合とは反対に、右側にオフセットして現れている。一方、画像上の座標系のy軸方向に係っては、その底頂部P0(RR180)は、SEM画像900の底頂部P0の位置に対し、SEM画像901(RR00)の場合と同様に、画像上の縦方向に、上下の顕著なオフセットは見受けられない。
【0060】
SEM画像901(RR90)の場合、その底頂部P0(RR90)は、画像上の座標系のy軸方向に係り、SEM画像900の底頂部P0の位置よりも、画像上の縦方向に、上側にオフセットして現れている。一方、画像上の座標系のx軸方向に係っては、その底頂部P0(RR90)は、SEM画像900の底頂部P0の位置に対し、画像上の横方向に、左右の顕著なオフセットは見受けられない。
【0061】
SEM画像901(RR270)の場合、その底頂部P0(RR270)は、画像上の座標系のy軸方向に係り、SEM画像900の底頂部P0の位置よりも、画像上の縦方向に、SEM画像901(RR90)の場合とは反対に、下側にオフセットして現れている。一方、画像上の座標系のx軸方向に係っては、その底頂部P0(RR270)は、SEM画像900の底頂部P0の位置に対し、SEM画像901(RR90)の場合と同様に、画像上の横方向に、左右の顕著なオフセットは見受けられない。
【0062】
このように、図示の例では、いずれのローテーション角度RRの場合も、試料5のピラミッドパターン90の開口部の形状は、スキャン開始側がスキャン終了側よりも歪の影響が大きくなっている。そのため、例えばSEM画像901(RR00),SEM画像901(RR180)のように、イメージシフトのスキャン方向が画面上の左右に互いに反対向きになれば、歪の影響が大きい部分と小さい部分とは画面上の左右で逆になっている。また、SEM画像901(RR90)とSEM画像901(RR270)のように、イメージシフトのスキャン方向が画面上の上下で互いに反対向きに変われば、歪の影響が大きい部分と小さい部分とは画面上の上下で逆になる。
【0063】
なお、図2(a)に示したスキャン歪が生じていない場合のSEM画像900については、イメージシフトによる電子線3のスキャン方向を、そのローテーション角度RRを、0°,180°,90°,270°と同様に変更してラスターローテーションしてみても、それぞれのSEM画像900(RR00),900(RR180),900(RR90),900(RR270)におけるピラミッドパターン90の形状は変化せず、各頂点P0〜P4の画像上の位置も変化しない。
【0064】
このように、スキャン歪の影響は、SEM画像を取得する際の電子線3のスキャン方向に依存するため、各スキャン方向からイメージシフトで撮像したSEM画像901(RR00),901(RR180),901(RR90),901(RR270)それぞれの画像の結果を平均化することで、スキャン歪の影響を抑制することが可能となる。
【0065】
そこで、本実施の形態では、スキャン歪の影響を抑制したイメージシフトを行って、図2(a)に示したスキャン歪が生じていない場合の本来のSEM画像900のようなSEM画像を得るために、処理装置50は、次に述べるような、スキャン歪によるランディング角度の測定誤差抑制処理を行うようになっている。
【0066】
処理装置50は、このスキャン歪によるランディング角度の測定誤差抑制処理では、まず、キャリブレーションパターン画像取得部として、キャリブレーションサンプルとしてのピラミッドパターン90の試料面上の位置、例えば図2(a)に示したような本来のピラミッドパターン90の頂点P0に該当する試料面上の位置に観察位置を合わせ、ラスターローテーションによりローテーション角度RRを少なくとも対極する2方向に変化させて、ローテーション角度RR毎のピラミッドパターン90のSEM画像901をそれぞれイメージシフトで取得する。本実施の形態では、ローテーション角度RRを0°,180°,90°,270°と変化させて、図2(b)に示したSEM画像901(RR00),901(RR180),901(RR90),901(RR270)のように、画像上のx軸方向,y軸方向それぞれの対極する2方向のSEM画像901を取得する。なお、本実施の形態では、ランディング角度の測定誤差抑制処理を、偏向器23による電子線3のスキャン方向それぞれの対極する2方向に対応して行うために画像上のx軸方向,y軸方向それぞれの対極する2方向のSEM画像901を取得するが、例えばスキャン方向それぞれのスキャン歪の影響に変わりがないならば、x軸方向,y軸方向いずれかの対極する2方向だけでも、ランディング角度の測定誤差抑制処理の実行は可能である。
【0067】
そして、処理装置50は、前述した電子線3のランディング角度の計測補正処理の場合と同様に、電子線3のランディング角度計測部として、SEM画像901(RR00),901(RR180),901(RR90),901(RR270)それぞれのピラミッドパターン90について、それぞれのピラミッドパターン90の幾何学的な変形を基に、SEM画像901(RR00),901(RR180),901(RR90),901(RR270)をそれぞれ取得した際における、試料5に対する電子線3の入射角度、すなわち電子線3のランディング角度を推定する。
【0068】
これにより、処理装置50は、ピラミッドパターン90についてSEM画像901(RR00),901(RR180),901(RR90),901(RR270)それぞれと同じ形状を得るときに観察方向として設定する、試料5の試料面に対する電子線3のランディング角度、並びに電子線3の傾斜角度を得ることができる。
【0069】
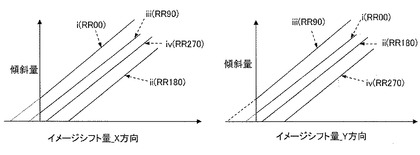
図3は、イメージシフト量と電子線の傾斜角度との関係の特性図である。
図3(a)は、SEM画像901(RR00),901(RR180),901(RR90),901(RR270)それぞれを基に推定した電子線3のランディング角度それぞれに係り、画面上の左右方向に対応する絶対座標系上のx軸方向のイメージシフト量と、推定した電子線のランディング角度に対応したx軸方向の電子線3の傾斜量との関係を示した特性図である。
【0070】
図3(b)は、同じくSEM画像901(RR00),901(RR180),901(RR90),901(RR270)それぞれを基に推定した電子線3のランディング角度それぞれにおいて、画面上の上下方向に対応する絶対座標系上のy軸方向のイメージシフト量と、推定した電子線の傾斜角度に対応したy軸方向の電子線3の傾斜量との関係を示した特性図である。
【0071】
図中、i(RR00),ii(RR180),iii(RR90),iv(RR270)で示した特性それぞれは、SEM画像901(RR00),901(RR180),901(RR90),901(RR270)それぞれを基に推定した各電子線3のランディング角度での、x軸方向若しくはy軸方向のイメージシフト量と、対応するx軸方向若しくはy軸方向の電子線3の傾斜量、すなわち電子線3の傾斜角度のx軸方向成分若しくはy軸方向成分との関係を示している。
【0072】
ここで、画像の結果として、各スキャン方向からイメージシフトで撮像したSEM画像901(RR00),901(RR180),901(RR90),901(RR270)それぞれの画像の結果を平均化することは、スキャン信号に関しては、画像901(RR00),901(RR180),901(RR90),901(RR270)それぞれを基に推定した電子線3のランディング角度それぞれを平均化したランディング角度で、かつx軸方向及びy軸方向に関して特性i(RR00),ii(RR180),iii(RR90),iv(RR270)を平均化した特性のスキャン信号で、ピラミッドパターン90のSEM画像をイメージシフトで取得することに該当する。
【0073】
そこで、当初に観察位置を合わせた際に設定された、試料5に対する電子線3のランディング角度に対応する電子線3の傾斜角度を、この平均化した電子線3のランディング角度に対応する電子線3の傾斜角度に合わせるようにし、スキャン信号をx軸方向及びy軸方向に関して特性i(RR00),ii(RR180),iii(RR90),iv(RR270)を平均化した特性に対応したイメージシフト量に対する電子線3の傾斜角度を生成するスキャン信号にすることにより、図2(b)に示したSEM画像901(RR00)は、スキャン歪の影響が抑制され、図2(a)に示したスキャン歪が生じていない場合の本来のSEM画像900に近づけることができる。
【0074】
そのため、処理装置50は、各ローテーション角度RR0°,180°,90°,270°毎のSEM画像901(RR00),901(RR180),901(RR90),901(RR270)それぞれを取得した際における、試料5に対する電子線3の入射角度、すなわち電子線3のランディング角度を推定したならば、スキャン歪測定誤差抑制部として、まず、これらそれぞれの電子線3のランディング角度を平均化する。そして、処理装置50は、この平均化した推定ランディング角度に対応する電子線の傾斜角度に、当初に観察位置を合わせた際に設定された、試料5に対する電子線3のランディング角度に対応する電子線3の傾斜角度を補正して蓄積する。
【0075】
次に、処理装置50は、イメージシフトを行うためのスキャン信号がスキャン歪の影響が抑制されたものになるように、スキャン信号を、上述したi(RR00),ii(RR180),iii(RR90),iv(RR270)で示した特性を平均化した特性のイメージシフト量毎に対応した電子線3の傾斜角度を発生させるように補正して蓄積する。
【0076】
そして、処理装置50は、測定精度を向上させるため、試料5の試料面上の別の位置にも観察するピラミッドパターン90が形成されている測定点がある場合は、このピラミッドパターン90についても、キャリブレーションパターン画像取得部、電子線3のランディング角度計測部、スキャン歪測定誤差抑制部として同様なランディング角度の測定誤差抑制処理を行う。
【0077】
その後、処理装置50は、試料5の試料面上の測定点全てのピラミッドパターン90についてのランディング角度の測定誤差抑制処理を終えたならば、測定点毎の補正して蓄積した電子線3の傾斜角度、及びスキャン信号をさらに平均化して、スキャン歪の影響を抑制した電子線3の傾斜角度、及びスキャン信号の精度を向上させる。
【0078】
そして、これらの測定結果を利用して装置毎にビーム傾斜補正等を行い、装置間測長値差を低減させることが可能となる。
【0079】
これに対し、従来の測長機能を備えた走査電子顕微鏡では、イメージシフトによる電子線3のスキャン方向を対極する2方向に変化させることなく、所定の単一のスキャン方向、例えばローテーション角度RRを0°で取得したキャリブレーションパターンのSEM画像901(RR00)のみを用いて、処理装置50が、電子線3のランディング角度の計測補正部として、電子線3のランディング角度の計測補正処理を行っていたため、そのランディング角度計測部が推定するランディング角度や、ランディング角度補正部が補正する電子線3のランディング角度と電子線3の傾斜角度との対応は、スキャン歪によるオフセットを加味した値となり、測定誤差となっていた。
【0080】
<パターン傾斜によるランディング角度の測定誤差抑制処理>
次に、ランディング角度のパターン傾斜による測定誤差抑制処理について説明する。
キャリブレーションサンプルにおけるウェーハ面と結晶方位面とのずれは、キャリブレーションサンプルとしての試料5毎に異なる。
【0081】
図4は、キャリブレーションパターンがシリコンウェーハの結晶方位面に合致していないウェーハ面に形成されたキャリブレーションサンプルの観察時のパターン断面図である。
【0082】
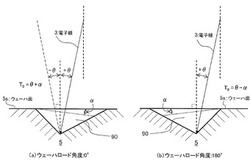
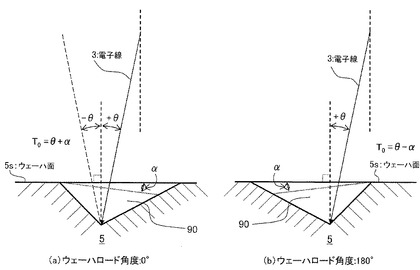
図4(a)は、キャリブレーションサンプルを予め設定された所定の向きであるウェーハロード角度を0°にしてステージ31に搭載し、試料室30内に配置した状態を示す一方、図4(b)は、キャリブレーションサンプルをこのウェーハロード角度0°とは逆向きの対極するウェーハロード角度を180°にしてステージ31に搭載し、試料室30内に配置した状態を示す。
【0083】
図4においては、試料5の試料面、すなわちピラミッドパターン90が形成されたシリコンウェーハのウェーハ面5sが、その結晶方位面((100)面)すなわちピラミッドパターン90に対して傾斜角αで傾いており、電子線3が試料5の試料面5sに対してランディング角度θで入射している場合を示している。
【0084】
なお、ここでは、簡便のため、試料5の法線、すなわちピラミッドパターン90が形成された試料面5sの法線は電子光学系20の光軸方向と平行であり、電子線3の試料面5sに対するランディング角度θの大きさは、電子線3の傾斜角度の大きさに対応しているものとして説明する。
【0085】
この場合、図4(a),図4(b)に示すように、試料5の試料面5sすなわちシリコンウェーハの試料面(ウェーハ面)5sとその結晶方位面((100)面)との傾斜角αは、ウェーハロード角度が変わっても、ウェーハ内であるならば面内同一である。したがって、試料5をウェーハロード角度0°と180°とで互いに逆向きに180°回転させて試料室30内に配置すると、各ウェーハロード角度0°, 180°における結晶方位面((100)面)の試料面(ウェーハ面)5sに対する傾斜は、試料面5sの法線を軸に対称になっている。
【0086】
ここで、試料5に係るウェーハロード角度0°,180°それぞれのウェーハロード状態で、処理装置50が前述した電子線3のランディング角度計測部として機能することにより計測される、試料面5sに対する電子線3のランディング角度を、それぞれランディング角度T00,T180とする。
【0087】
例えば、このランディング角度T00の推定は、ランディング角度計測部としての処理装置50が、ウェーハロード角度0°で試料室30内に配置された試料5に対して、予め設定された観察方向、すなわち図示の例では電子線3の傾斜角度をθにビームチルトして、試料5のピラミッドパターン90部分をイメージシフトで観察することにより、そのSEM画像を取得する。そして、この取得した電子線3の傾斜角度をθとするSEM画像上でのピラミッドパターン90の幾何学的な変形を基に、その際における試料5に対する電子線3のランディング角度T00が推定される。ランディング角度T180の推定についても同様である。
【0088】
したがって、ウェーハロード角度が0°,180°それぞれの試料5の配置状態における、ピラミッドパターン90の幾何学的な変形を基にした電子線3のランディング角度計測部によるランディング角度計測処理において、結晶方位面((100)面)との傾斜角αは、逆転して計測されることになる。
【0089】
すなわち、ウェーハロード角度0°,180°それぞれの試料5の配置状態における電子線3のランディング角度T00,T180は、
T0=電子線3のランディング角度θ+ピラミッドパターン90の傾斜角度α
T180=電子線3のランディング角度θ−ピラミッドパターン90の傾斜角度α
α:試料面5sに対する結晶方位面((100)面)の傾斜角度、
θ:予め設定された観察方向に対応する電子線3の傾斜角度、
で表わされる。
【0090】
したがって、この場合、試料面5sの法線は電子光学系20の光軸方向と平行であることであるから、試料面5sに対する電子線3のランディング角度θ、すなわちこの電子線3のランディング角度θに対応する予め設定された観察方向に対応する電子線3の絶対的な傾斜角度θのみを求めるには、ウェーハロード角度0°で計測された電子線3のランディング角度T00と、ウェーハロード角度180°で計測された電子線3のランディング角度T180とを平均化すればよく、
電子線の絶対的な傾斜角度θ=(T0 + T180)÷2
となる。
【0091】
そこで、本実施の形態では、電子線3のランディング角度θに対応する予め設定された観察方向に対応する電子線3の絶対的な傾斜角度θのみを求めるために、処理装置50は、次に述べるようなランディング角度のパターン傾斜による測定誤差抑制処理を行うようになっている。
【0092】
処理装置50は、このスキャン歪によるランディング角度の測定誤差抑制処理では、まず、キャリブレーションパターン画像取得部として、ピラミッドパターン90が形成された試料5の、ピラミッドパターン90がそれぞれ対極するウェーハロード角度0°,180°で配置された状態それぞれのSEM画像を取得する。なお、これらSEM画像の取得にあたっては、試料5のロード方向をそれぞれ逆向きにしてステージ31に搭載し直してもよいし、ステージ機構32によって試料5が搭載されたステージ31ごと逆向きにすることも可能である。
【0093】
そして、処理装置50は、前述した電子線3のランディング角度の計測補正処理の場合と同様に、電子線3のランディング角度計測部として、それぞれ対極するウェーハロード角度0°,180°で配置された状態で取得されたそれぞれSEM画像上でのピラミッドパターン90の幾何学的な変形を基に、ウェーハロード角度0°,180°それぞれの対極の配置状態における電子線3のランディング角度T00,T180を計測する。
【0094】
その上で、処理装置50は、パターン傾斜測定誤差抑制部として、これら電子線3のランディング角度T00,T180を平均化することにより、試料面5sと結晶方位面((100)面)との傾斜角αによる影響を抑制して、試料面5sに対する電子線3のランディング角度を電子線3の絶対的な傾斜角度によって高精度に計測する。
【0095】
<測定誤差抑制処理の実施例>
以下に、図1に示した本実施の形態に係る走査電子顕微鏡1での、上述したスキャン歪によるランディング角度の測定誤差抑制処理、並びにパターン傾斜によるランディング角度の測定誤差抑制処理の実施例について、フローチャートに基づき説明する。
【0096】
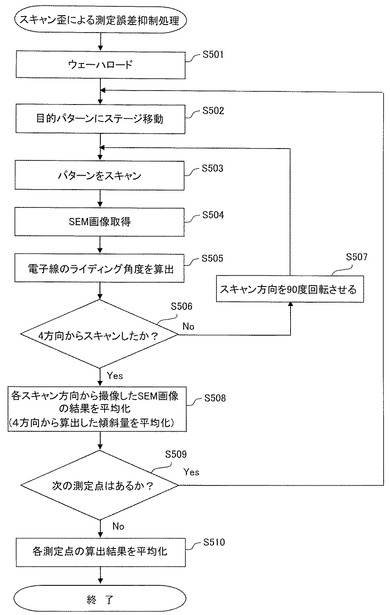
図5は、走査電子顕微鏡で行われるスキャン歪によるランディング角度の測定誤差抑制処理のフローチャートである。
【0097】
処理装置50は、スキャン歪によるランディング角度の測定誤差抑制処理の開始が指示されると、試料面にピラミッドパターン90が形成された試料5を試料室30内にロードし、ステージ31に搭載する(S501)。そして、処理装置50は、試料5に係る既知の試料データを基にステージ機構32を制御して ステージ31に搭載された試料5の目的のピラミッドパターン90が画像中央になるように、ステージ31を移動する(S502)。ここでの位置合わせは、例えば、試料面上における目的のピラミッドパターン90の中心(中央)の底頂部P0を、電子光学系の20の光軸上に位置させるように、ステージ31を移動することにより行われる。
【0098】
処理装置50は、目的のピラミッドパターン90が上述した所定位置に配置されたならば、フォーカスを集束レンズ21及び対物レンズ22で調整した上で、ラスターローテーションのローテーション角度RRを0°にして、偏向器23によるイメージシフトにより、目的のピラミッドパターン90を電子線3でスキャンする(S503)。
【0099】
そして、処理装置50は、この電子線3のスキャンに関連して、二次電子検出器40から供給される検出信号を基に、ローテーション角度RRが0°(RR00)の、ピラミッドパターン90のSEM画像901(RR00)を生成し、取得する(S504)。
【0100】
処理装置50は、SEM画像901(RR00)を取得したならば、このローテーション角度RRが0°(RR00)のSEM画像901(RR00)上におけるピラミッドパターン90の幾何学的変形を基に、試料5の試料面に対する電子線3のランディング角度を推定し、この推定した電子線3のランディング角度におけるイメージシフト量と電子線の傾斜角度との関係の特性i(RR00)とともに蓄積する(S505)。
【0101】
その後、処理装置50は、スキャン方向を相互に反対向きに変えた、予め設定されている対極する方向での、この場合はローテーション角度RRが0°(RR00),180°(RR180),90°(RR90),270°(RR270)での電子線3のランディング角度の推定が全てが完了したか否かを確認する(S506)。
【0102】
処理装置50は、この確認により、全てが完了していない場合は、ローテーション角度RRを残りのローテーション角度RRにラスターローテーションを設定し(S507)、残りのローテーション角度RRそれぞれについて、ステップS503〜S506の処理を繰り返し行う。
【0103】
これに対し、処理装置50は、予め設定されている対極する方向での正逆2方向によるラスターローテーションによる電子線3のランディング角度の推定が完了した場合には、各方向で推定した傾斜角度、及び各推定した電子線3のランディング角度におけるイメージシフト量と電子線の傾斜角度との関係の特性i(RR00),ii(RR180),iii(RR90),iv(RR270)をそれぞれ平均化して、スキャン歪みの影響を抑制させた電子線3の傾斜角度、及びこのスキャン歪みの影響を抑制させた電子線3の傾斜角度でのイメージシフト量と電子線の傾斜角度との関係特性を求める(S508)。
【0104】
より具体的には、処理装置50は、ラスターローテーションのローテーション角度RRが0°,180°,90°,270°それぞれで推定した電子線3のランディング角度を平均化する。同様に、処理装置50は、ラスターローテーションのローテーション角度RRが0°,180°,90°,270°それぞれで推定した電子線3のランディング角度それぞれに対応するイメージシフト量と電子線の傾斜角度との関係の特性i(RR00),ii(RR180),iii(RR90),iv(RR270)も平均化する。
【0105】
そして、処理装置50は、この平均化した推定ランディング角度に対応する電子線の傾斜角度に、当初に観察位置を合わせた際に設定された試料5に対する電子線3のランディング角度に対応する電子線3の傾斜角度がなるように補正し、スキャン信号を平均化した特性のイメージシフト量毎に対応した電子線3の傾斜角度を発生させるように補正して蓄積する。
【0106】
したがって、この場合、ステップS502では、ピラミッドパターン90が画像中央になるように、ピラミッドパターン90の中心(中央)の底頂部P0を電子光学系の20の光軸上に位置させるようにランディング角度0°に配置されているので、偏向器23によって電子線3を故意に偏向していない状態で、イメージシフトのためのスキャン信号だけで偏向器23により電子線3の偏向を行った場合の、シフト中間の、画像中央に対応する電子線3の傾斜角度としてのランディング角度0°は、この平均化した推定ランディング角度に該当することになる。
【0107】
そして、スキャン信号は、この平均化した推定ランディング角度をイメージシフトの中央位置とし、図3に示したRR00,RR180,RR90,RR270で示した特性それぞれを平均化した特性のイメージシフト量毎に対応した電子線3の傾斜角度を反映するスキャン信号に補正すれば、スキャン歪みの影響を抑制することができる。
【0108】
その上で、本実施例においては、処理装置50は、さらに高精度にスキャン歪みの影響を抑制するために、試料5の試料面上の別の位置にも観察するピラミッドパターン90が形成されている測定点があるか否かを、試料5に係る既知の試料データを基に判別する(S509)。
【0109】
そして、処理装置50は、他に測定点がある場合は、他の測定点についても、ステップS502〜S509の処理を繰り返し行う。これに対し、試料5の試料面上の測定点全てのピラミッドパターン90についてステップS502〜S509の処理を終えたならば、測定点毎の蓄積した電子線3の傾斜角度、及びスキャン信号をさらに平均化して、スキャン歪の影響を抑制した電子線3の傾斜角度、及びスキャン信号の精度を向上させる(S510)。
【0110】
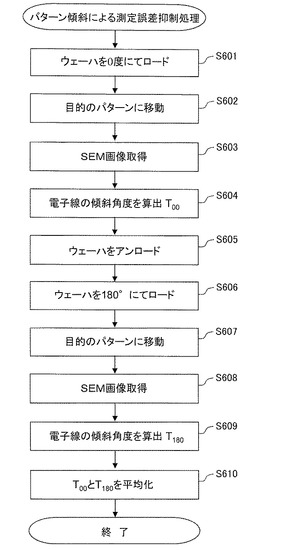
図6は、走査電子顕微鏡で行われるランディング角度のパターン傾斜による測定誤差抑制処理のフローチャートである。
【0111】
処理装置50は、ランディング角度のパターン傾斜による測定誤差抑制処理の開始が指示されると、試料面にピラミッドパターン90が形成された試料5を試料室30内にウェーハロード角度を0°にしてロードし、ステージ31に搭載する(S601)。そして、処理装置50は、試料5に係る既知の試料データを基にステージ機構32を制御して ステージ31に搭載された試料5の目的のピラミッドパターン90が画像中央になるように、ステージ31を移動する(S602)。ここでの位置合わせは、例えば、試料面上における目的のピラミッドパターン90の中心(中央)の底頂部P0を、電子光学系の20の光軸上に位置させるように、ステージ31を移動することにより行われる。
【0112】
処理装置50は、目的のピラミッドパターン90が上述した所定位置に配置されたならば、フォーカスを集束レンズ21及び対物レンズ22で調整した上で、ラスターローテーションのローテーション角度RRを所定角度に固定して、偏向器23によるイメージシフトにより、目的のピラミッドパターン90を電子線3でスキャンする。そして、処理装置50は、この電子線3のスキャンに関連して、二次電子検出器40から供給される検出信号を基に、ウェーハロード角度0°で配置された状態のピラミッドパターン90のSEM画像を生成し、取得する(S603)。
【0113】
処理装置50は、前述した電子線3のランディング角度の計測補正処理の場合と同様に、電子線3のランディング角度計測部として、ウェーハロード角度0°で配置された状態で取得されたそれぞれSEM画像上でのピラミッドパターン90の幾何学的な変形を基に、ウェーハロード角度0°の配置状態における電子線3のランディング角度T00を計測して蓄積する(S604)。
【0114】
その後、本実施例では、処理装置50は、試料5を一旦試料室30内からアンロードし(S605)、試料5のロード方向を逆向きにしてウェーハロード角度を180°にしてから、試料5を再び試料室30内にロードし、ステージ31に搭載する(S606)。
【0115】
処理装置50は、試料5に係る既知の試料データを基にステージ機構32を制御して 先に電子線3のランディング角度T00を計測したのと同じ目的のピラミッドパターン90が画像中央になるように、ステージ31を移動する(S607)。
【0116】
そして、処理装置50は、ウェーハロード角度180°で配置された状態のピラミッドパターン90のSEM画像を生成し、取得するとともに(S608)、ウェーハロード角度180°の配置状態における電子線3のランディング角度T180を計測して蓄積する(S609)。
【0117】
その後、処理装置50は、ウェーハを0°でロードした場合の推定された電子線3のランディング角度T00と、ウェーハを180°でロードした場合の推定された電子線3のランディング角度T180とを平均化して、試料5の試料面に対するピラミッドパターン90の傾斜角度αをキャンセルした電子線3の傾斜角度θを求める(S610)。そして、処理装置50は、この蓄積された電子線3の傾斜角度θを用いることにより、試料面5sと結晶方位面((100)面)との傾斜角αによる影響を抑制して、試料面5sに対する電子線3のランディング角度を電子線3の絶対的な傾斜角度によって高精度に計測することができる。
【0118】
これにより、ピラミッドパターン90の傾斜量は、同一に切り出したウェーハ内であれば、全てのパターンが同一の傾斜量となるため、処理装置50は、一度、試料面に対するピラミッドパターン90の傾斜量αを測定し、記録しておくことにより、ピラミッドパターン90の傾斜角度をキャンセルすることができ、絶対角度の測定が可能となる。
【0119】
次に、これら測定誤差抑制処理を備えた走査電子顕微鏡1のメンテナンス処理について説明する。
【0120】
電子線3の傾斜角度は、日々の走査電子顕微鏡1の使用状況により変化する可能性がある。特に電子銃10のチップ交換や可動絞り穴交換等のメンテナンスにより大きく変化する。
【0121】
図5に示したスキャン歪によるランディング角度の測定誤差抑制処理を行うことによりスキャン歪の影響を抑制することが可能である。また、図6に示したパターン傾斜によるランディング角度の測定誤差抑制処理を行うことにより、キャリブレーションパターンとしての形状が既知の多面体構造物が形成された試料面自体の傾斜をキャンセルすることができるので、試料面に対する荷電粒子線のランディング角度を荷電粒子線の絶対的な傾斜角度によって高精度に計測することが可能である。さらに、これら手法を一緒に行うことで、スキャン歪による測定誤差を抑制し、ピラミッドパターンの傾斜をキャンセルさせて、電子線の絶対角度を測定可能となる。
【0122】
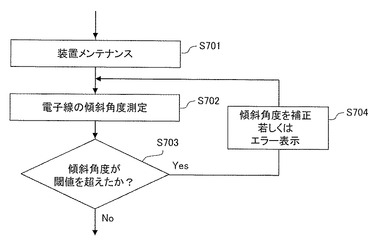
図7は、走査電子顕微鏡1で行われるメンテナンス補正処理の一実施例を示す。
走査電子顕微鏡1において、電子銃10のチップ交換や可動絞り穴交換等の装置メンテナンスが行われると(S701)、そのメンテナンス作業後、処理装置50は、図5に示したスキャン歪によるランディング角度の測定誤差抑制処理を実行する(S702)。そして、処理装置50は、ラスターローテーションのローテーション角度RRが0°,180°,90°,270°それぞれで推定した試料5のピラミッドパターン90に対する電子線3のランディング角度の平均化した値、又はさらにこれを試料5の試料面上のピラミッドパターン90が形成された測定点について平均化した値が、所定の閾値を超えているか否かについて判別する(S703)。
【0123】
この結果、処理装置50は、所定の閾値を超えている場合には、スキャン歪の影響を抑制した電子線3の傾斜角度及びスキャン信号の補正を行うとともに、入出力装置60のディスプレイ61に表示されたGUI画面上にエラー表示を行い(S704)、ステップS702のスキャン歪によるランディング角度の測定誤差抑制処理、及びステップS703の測定誤差抑制処理の完了確認処理を、平均化した値が所定の閾値以下になるまで繰り返すようになっている。
【0124】
なお、このスキャン歪によるランディング角度の測定誤差抑制処理に予め使用する試料5については、図6に示したパターン傾斜によるランディング角度の測定誤差抑制処理を行っておく。この結果、このランディング角度によるパターン傾斜の測定誤差抑制処理を行い、予め試料面(ウェーハ面)と結晶方位面とのずれを校正した試料5を使用することで、計測時間の短縮が可能である。
【0125】
これにより、絶対座標系による絶対的な電子ビームの傾斜角度を算出することができ、これらの測定結果を利用して装置毎にビーム傾斜補正等を行い、装置間測長値差を低減させることが可能となる。その際、ピラミッドパターン90が形成された同じ試料5を持ち回りしなくとも、装置毎に、装置それぞれの較正に用いるピラミッドパターン90が形成された試料5の試料面(ウェーハ面)と結晶方位面とのずれに関するモニターを実施することによって、全ての装置が常に同一の傾斜角度を維持することが可能となり、ビーム傾斜による測長値機差を低減することが可能となる。この結果、ゴールデンウェーハ等の同一サンプルで各装置を測定する必要はなくなり、どのサンプルでも高精度に絶対傾斜角度が測定できる。
【0126】
次に、走査電子顕微鏡1で行われるメンテナンス補正処理の、別の実施例について図8に基づき説明する。
【0127】
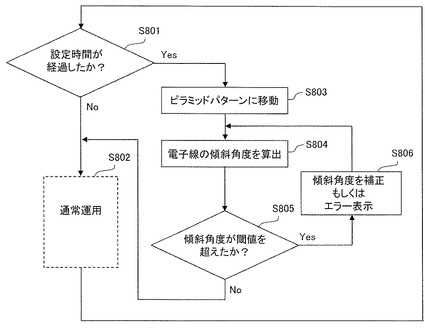
図8は、走査電子顕微鏡1で行われるメンテナンス補正処理の別の実施例のフローチャートを示す。
【0128】
本実施例では、走査電子顕微鏡1における電子線3の傾斜角度をある一定間隔でモニターすることによって、装置変動や外乱によって発生する電子線の傾斜をリアルタイムで管理することが可能になっている。また、図6に示したパターン傾斜によるランディング角度の測定誤差抑制処理が行われ、予め試料面(ウェーハ面)と結晶方位面とのずれを校正した試料5をスタブサンプルとしてステージ31上に配置することで、短時間で自動に測定することが可能になっている。
【0129】
図8において、処理装置50は、走査電子顕微鏡1としての通常運用中(通常使用中)に、計時手段として備えられているタイマを基に予め設定されたメンテナンス周期時間を計測しているとともに(S802)、このメンテナンス周期時間の計測値が予め設定されているメンテナンス時間を経過したか否かを確認している(S801)。
【0130】
処理装置50は、メンテナンス周期時間が未だ経過していない場合は、通常運用中(通常使用中)の処理を続行する一方、メンテナンス時間を経過している場合には、通常運用中(通常使用中)の処理を中断して、電子線3の照射位置や観察視野を、ステージ31に搭載された観察又は測定対象の試料上からステージ31上に配置されたスタブサンプルのピラミッドパターン90に位置合わせするように、ステージ31を自動で移動する(S803)。
【0131】
そして、処理装置50は、このピラミッドパターン90に対して、図5に示したスキャン歪によるランディング角度の測定誤差抑制処理を実行する(S804)。その上で、処理装置50は、ラスターローテーションのローテーション角度RRが0°,180°,90°,270°それぞれで推定した試料5のピラミッドパターン90に対する電子線3のランディング角度の平均化した値、又はさらにこれを試料5の試料面上のピラミッドパターン90が形成された測定点について平均化した値が、所定の閾値を超えているか否かについて判別する(S805)。
【0132】
この結果、処理装置50は、所定の閾値を超えている場合には、スキャン歪の影響を抑制した電子線3の傾斜角度及びスキャン信号の補正を行うとともに、入出力装置60のディスプレイ61に表示されたGUI画面上にエラー表示を行い(S806)、ステップS804のスキャン歪によるランディング角度の測定誤差抑制処理、及びステップS805の測定誤差抑制処理の完了確認処理を、平均化した値が所定の閾値以下になるまで繰り返す。
【0133】
そして、処理装置50は、平均化した値が所定の閾値以下になったならば、先のメンテナンス周期時間の計測値をリセットした上、電子線3の照射位置や観察視野を、ステージ31に搭載された観察又は測定対象の試料上に戻し、走査電子顕微鏡1としての通常運用の続きを行う。
なお、このスキャン歪によるランディング角度の測定誤差抑制処理に予め使用する試料5については、図6に示したパターン傾斜によるランディング角度の測定誤差抑制処理を行っておく。この結果、このランディング角度によるパターン傾斜の測定誤差抑制処理を行い、予め試料面(ウェーハ面)と結晶方位面とのずれを校正した試料5を使用することで、計測時間の短縮が可能である。
【0134】
これにより、電子線3の傾斜角度を所定の周期時間間隔でモニターすることにより、装置変動や外乱によって発生する電子線の傾斜をリアルタイムで管理することが可能となる。また、ステージ上にスタブサンプルとして設置することによって、観察又は測定対象の試料を交換する必要もなく、計測時間の短縮化が可能となる。
【0135】
なお、本発明に係る荷電粒子線装置、及び荷電粒子線のランディング角度の計測補正方法の一実施の形態は、以上詳述したとおりであるが、その各部の構成の具体的態様、手順の具体的内容については、説明中で述べた以外でも種々の変形例の適用が可能である。例えば、メンテナンス補正処理の説明では、スキャン歪によるランディング角度の測定誤差抑制処理に予め使用する試料5については、図6に示したパターン傾斜によるランディング角度の測定誤差抑制処理を行っておく構成としたが、スキャン歪によるランディング角度の測定誤差抑制処理と一緒に行うようにしてもよい。また、スキャン歪によるランディング角度の測定誤差抑制処理、パターン傾斜によるランディング角度の測定誤差抑制処理は、それぞれ一方のみを行うだけでも、従前に電子線3のランディング角度の計測補正処理の精度を向上させることが可能である。
【符号の説明】
【0136】
1 走査電子顕微鏡、 2 装置筺体、 3 電子線、 5 試料、 10 電子銃、
20 電子光学系、 21 集束レンズ、 22 対物レンズ、 23 偏向器、
30 試料室、 31 ステージ、 32 ステージ機構、 40 二次電子検出器、
50 処理装置、
【技術分野】
【0001】
本発明は、半導体装置の回路パターン等の微少な寸法を計測する荷電粒子線装置、及び荷電粒子線のランディング角度の計測補正方法に関する。
【背景技術】
【0002】
近年の半導体装置の回路パターンの微小化に伴い、そのパターン寸法を計測する半導体測長装置に求められる計測精度も高まってきている。とりわけ、計測装置間での測長値器差の精度は、年々その要求が厳しくなってきている。
【0003】
半導体測長装置では、集束させた電子線(電子ビーム)を観察・計測対象の試料に照射して試料面上で2次元的に走査し、その際に試料から発生する2次電子を検出して得られたSEM(Scanning Electron Microscope:走査電子顕微鏡)画像上でパターン寸法の計測箇所を指定することにより、そのパターン寸法を該当部分の検出信号波形を用いてSEM画像の倍率を基に算出して測定する構成になっている。
【0004】
ところで、半導体測長装置のようなSEM画像すなわち荷電粒子線像を取得する荷電粒子線装置にあっては、画像取得の際、試料に対して荷電粒子線としての電子線が斜めに入射すると、それにより得られる試料の荷電粒子線像は、その際の試料に対する荷電粒子線の入射角度、すなわち荷電粒子線のランディング角度に応じて変化する。この場合、荷電粒子線のランディング角度は、試料の法線と荷電粒子線のビーム光軸とのなす角度を示す。
【0005】
したがって、半導体測長装置を用いた寸法計測では、上述したようにSEM画像を基に計測するため、同じ試料の、同じパターンの寸法計測であっても、試料に対する電子線の入射角度の違いによってそのSEM画像自体が変化してしまい、パターン寸法の測定値も変化してしまう。そこで、半導体測長装置では、通常、電子線を故意に偏向していない状態では、SEM画像の取得に当たって、パターンが形成された試料面に対して電子線が垂直に入射するように設計されている。
【0006】
しかしながら、半導体測長装置を含む荷電粒子線装置においては、荷電粒子線を偏向,収束する荷電粒子光学系の光軸とこの荷電粒子光学系により偏向された荷電粒子線のビーム光軸とのなす角度で規定される荷電粒子線の傾斜角度について、0.1°以下の微小な傾斜角度を測定する術がなかった。このため、前述した電子線を故意に偏向していない状態であっても、電子線を偏向,収束する電子光学系の光軸方向に沿って、電子線が試料面に対して垂直に照射されているか否かについては、実際には確認できていない。これにより、各装置では、電子線すなわち荷電粒子線を偏向していない状態でも、荷電粒子線には電子光学系すなわち荷電粒子光学系の光軸に対して微小な傾斜が発生しており、さらにこの傾斜量は装置間で異なることから、この微小な傾斜による測長値器差が発生している。
【0007】
その一方で、従来、電子線すなわち荷電粒子線の傾斜角度を計測補正する手法としては、特許文献1に記載されているように、形状既知の多面体構造物、例えば形状既知のピラミッドパターンが形成された試料をキャリブレーションサンプルとして用い、そのキャリブレーションパターンとしてのピラミッドパターンのSEM画像を取得し、このSEM画像上でのピラミッドパターンの幾何学的な変形を基に、このSEM画像を取得した際における試料に対する荷電粒子線の入射角度、すなわち荷電粒子線のランディング角度を推定し、この推定したランディング角度を基に、試料に対するランディング角度それぞれに対応した荷電粒子線の傾斜角度を補正する手法がある。
【0008】
図9は、キャリブレーションパターンの一実施例としてのピラミッドパターンの説明図である。図9(a)は、ピラミッドパターンの3次元形状の模式図を、図9(b)は、図9(a)に示したピラミッドパターンが形成された試料のピラミッドパターン部分のSEM画像をそれぞれ示す。
【0009】
図9(a)において、ピラミッドパターン90は、シリコン(Si)ウェーハを結晶異方性エッチングして露出させた(111)面と、この(111)面と等価な結晶面方向を有する3つの面とを備えた四角錐形状の凹部パターンで形成されている。そのため、ピラミッドパターン90の各面同士がなす角は既知となる。図中、P0〜P4は、ピラミッドの各頂点を表わし、頂点P0はピラミッドパターン90の底頂部に該当し、頂点P1〜P4はピラミッドパターン90の開口部における各角部に該当する。ピラミッドパターン90の各面P0P1P2,P0P2P4,P0P4P3,P0P3P1は、ウェーハ面としてのシリコンの(100)面に対しての傾斜角がそれぞれtan−1(√2)≒54.74°になっている。
【0010】
なお、キャリブレーションパターンとしてのピラミッドパターン90は、四角錐形状の凹部パターンではなく四角錐形状の凸部パターンであってもよく、さらには多面体構造物のパターン形状自体も図示の四角錐形状(ピラミッド形状)に限られるものではなく、例えば角錐台形状、等であってもよい。
【0011】
図9(b)に示すように、図9(a)に示したピラミッドパターン90のトップダウンSEM画像(図示の例では、ピラミッドパターン90が形成されたウェーハ面を垂直上方から観測したSEM画像)900では、検出信号の値変化に基づき、ピラミッドパターン90の4つの谷線は、頂点P0とその余の頂点P1〜P4とを結ぶ直線P0P1,P0P2,P0P3,P0P4で、ピラミッドパターン90の開口部はピラミッドパターン90の各面P0P1P2,P0P2P4,P0P4P3,P0P3P1とウェーハ面との交線、すなわち線分P1P2,P2P4,P4P3,P3P1で現れる。
【0012】
そこで、特許文献1には、この形状既知のピラミッドパターンが形成された試料を予め設定した所望の観察方向から観察することによって取得したSEM画像上でのピラミッドパターンの幾何学的な変形を基に、その際における試料に対しての電子線の入射角度を推定し、この推定した入射角度が設定した所望の観察方向に該当する設定値になるように、例えば電子線の偏向を調整する等して、電子線の傾斜角度を試料の観察方向に合わせる方法が記載されている。
【0013】
また、特許文献2には、特許文献1に記載の手法を用いて、形状既知の多面体パターンが形成された試料の多面体パターン部分のSEM画像を取得し、そのSEM画像上での多面体パターンの幾何学的な変形を基に、試料に対する電子線の入射角度を推定するとともに、別装置でも、この推定に用いた同じ試料を用いてその多面体パターン部分のSEM画像を取得し、そのSEM画像上での多面体パターンの幾何学的な変形を基に、試料に対する電子線の入射角度を推定することにより、装置間で試料に対する電子線の入射角度を一致させるようにそれぞれの電子線の傾斜角度を対応付けることにより、装置間での電子線の傾斜角度の違いによる測長値器差を補正する方法が記載されている。
【先行技術文献】
【特許文献】
【0014】
【特許文献1】特開2005−183369
【特許文献2】特開2007−187538
【発明の概要】
【発明が解決しようとする課題】
【0015】
しかしながら、上述した特許文献1,2に記載されている方法による電子線の傾斜角度の計測、及び装置間の電子線の傾斜角度の違いによる測長値器差の補正では、次に述べる2つの問題がそれぞれの実用を依然と困難にしている。
【0016】
まず、第1の問題として、SEM画像の取得のための試料面上での電子線の2次元的な走査にあって、前述した装置間の電子線の傾斜角度の違いによる測長値器差の問題とは別に、電子線の傾斜角度を2次元平面内で連続変化させることにより取得した2次電子の検出信号自体の中にスキャン歪が内包されてしまっているという問題がある。なお、ここでのスキャン歪は、電子線を走査するためのスキャン信号が受ける外乱やスキャン信号自体の応答速度の変化等から、試料の取得したSEM画像が歪んでしまう現象を指す。
【0017】
図10は、スキャン歪を生じさせるスキャン信号の例の説明図である。
図10(a)は、スキャン歪を生じさせない本来のスキャン信号の例を示し、図10(b),(c)は、外乱や信号自体の応答速度の変化等からスキャン歪を生じさせてしまうスキャン信号の例を示す。
【0018】
例えば、図10(b)に示したスキャン信号は、図10(a)に示したようなスキャン信号の値の大きさVと時間tとの関係からなる本来のスキャン信号に対して、スキャン始点を含むスキャン前半側では電子線のスキャン速度が遅くなり、スキャン終点を含むスキャン後半側では電子線のスキャン速度が速くなる信号変化が起きるスキャン信号の一例を示したものである。また、図10(c)に示したスキャン信号は、本来のスキャン信号に対して、スキャン始点を含むスキャン前半側では電子線のスキャン速度が速くなり、スキャン終点を含むスキャン後半側では電子線のスキャン速度が遅くなる信号変化が起きているスキャン信号の一例を示したものである。
【0019】
極端な例として、図10(b),(c)に示したようなスキャン信号により試料のSEM画像を取得した場合、その取得したSEM画像にはスキャン歪が生じ、本来の形状が正方形状のパターンがこのスキャン歪により台形に見えたりする。このスキャン歪については、装置内である程度の補正を行ってはいるものの、その全てをキャンセルすることはできない。そのため、装置で取得したピラミッドパターンのSEM画像には、装置自体による多少のスキャン歪が含まれているので、このスキャン歪を含んでいるSEM画像上でのピラミッドパターンの幾何学的な変形を基に、このSEM画像を取得した際における試料に対する電子線の入射角度すなわちランディング角度を推定し、この推定した電子線のランディング角度に対応させて電子線の傾斜角度を推定して求めても、その計測結果には誤差が発生していることになる。
【0020】
次に、第2の問題として、このスキャン歪の影響の大きさは装置毎で異なるため、装置間のキャリブレーション(較正)が難しいという問題がある。例えば、特許文献1でキャリブレーションサンプルとして使用している、図9に示した形状既知のピラミッドパターン90は、シリコンウェーハの結晶方位面((100)面)に対して垂直に形成されるが、このシリコンウェーハの結晶方位面((100)面)自体は、ウェーハ面に対して必ずしも並行ではない。これは、シリコンのインゴットからウェーハを切り出す際に、ウェーハ面と結晶方位面((100)面)とが多少ずれてしまうためである。通常、このずれ量は0.2°以下となっているが、その大きさは0.05°以下の精度で電子線の傾斜角度を計測する半導体測長装置にとっては大き過ぎる値である。
【0021】
したがって、ピラミッドパターン90を用いて装置の電子線の試料に対する入射角度すなわち電子線のランディング角度を測定すると、実際には、電子線の傾斜角度と、このピラミッドパターン90が形成されたウェーハ面自体の傾斜角度とを合わせたものが、測定結果となる。すなわち、使用するキャリブレーションサンプルの違いによって、電子線の傾斜角度の計測結果が異なることになる。
【0022】
この結果、特許文献1に記載の方法では、上述したスキャン歪の影響やキャリブレーションサンプルのウェーハ面の結晶方位面とのずれの影響により、電子線の傾斜角度のみを計測することはできず、試料に対する相対角度のみの計測となる。
【0023】
これでは、特許文献2のように、装置間のキャリブレーションを行っても、装置毎のスキャン歪の影響が異なるので、ある傾斜角度で合わせこむことしかできない。さらに、キャリブレーションサンプルのウェーハ面の結晶方位面とのずれは試料毎に異なるので、各装置とも同じキャリブレーションサンプルを用いて計測しなくてはならず、1つのキャリブレーションサンプルを装置間でキャリブレータとして持ち回りしなければならない。
【0024】
本発明は、上述した問題点を鑑み、半導体装置の回路パターン等の微少な寸法を計測する荷電粒子線装置に係り、スキャン歪や荷電粒子線のランディング角度のばらつきに起因する測長値器差を低減し、荷電粒子線の絶対的な傾斜角度を高精度に測定することできるとともに、装置間のキャリブレーションにおける作業性の向上をはかった荷電粒子線装置、及び荷電粒子線のランディング角度の計測補正方法を提供することを目的とする。
【課題を解決するための手段】
【0025】
本発明は、試料面上に形成された、形状が既知の多面体構造物の荷電粒子線画像を撮像し、その取得した荷電粒子線画像上の多面体構造物の幾何学的な変形を基に、この荷電粒子線画像を取得した際における試料に対する荷電粒子線のランディング角度を推定し、この推定した荷電粒子線のランディング角度を基に、荷電粒子線のランディング角度それぞれに対応した荷電粒子線の傾斜角度を推定する荷電粒子線装置、又は荷電粒子線のランディング角度の計測補正方法であって、
(1) 試料面上に形成された、形状が既知の多面体構造物の荷電粒子線画像を撮像する際に、スキャン方向を相互に反対向きに変えた多面体構造物の荷電粒子線画像を取得し、これらスキャン方向が相互に反対向きの多面体構造物の荷電粒子線画像それぞれの画像の結果をこれら画像間で平均化することにより、スキャン歪の影響や荷電粒子線のランディング角度のばらつきに起因する測長値器差を低減し、この平均化した画像結果を基に荷電粒子線の傾斜角度を高精度に測定すること、
(2) 試料面上に形成された、形状が既知の多面体構造物の荷電粒子線画像を撮像する際に、試料の搭載向きを相互に反対向きに変えてロードし、ロード方向を相互に反対向きに変えた多面体構造物の荷電粒子線画像を取得し、これらロード方向が相互に反対向きの多面体構造物の荷電粒子線画像それぞれの画像の結果をこれら画像間で平均化することにより、スキャン歪の影響や荷電粒子線のランディング角度のばらつきに起因する測長値器差を低減し、この平均化した画像結果を基に荷電粒子線の傾斜角度を高精度に測定すること、
を特徴する。
【発明の効果】
【0026】
本発明によれば、スキャン歪の影響を抑制し、キャリブレーションパターンとしての形状が既知の多面体構造物が形成された試料面自体の傾斜をキャンセルすることができるので、試料面に対する荷電粒子線のランディング角度を荷電粒子線の絶対的な傾斜角度によって高精度に計測することが可能となり、スキャン歪や荷電粒子線のランディング角度のばらつきに起因する測長値器差を低減させることができる。
【図面の簡単な説明】
【0027】
【図1】本発明の荷電粒子線装置の一実施の形態としての、測長機能を備えた走査電子顕微鏡の概略構成図である。
【図2】スキャン歪の影響を模式的に示した説明図である。
【図3】イメージシフト量と電子線の傾斜角度との関係の特性図である。
【図4】キャリブレーションサンプルの観察時のパターン断面図である。
【図5】スキャン歪による測定誤差抑制処理のフローチャートである。
【図6】ランディング角度のパターン傾斜による測定誤差抑制処理のフローチャートである。
【図7】メンテナンス補正処理の一実施例のフローチャートである。
【図8】メンテナンス補正処理の別の実施例のフローチャートである。
【図9】キャリブレーションパターンの一実施例としてのピラミッドパターンの説明図である。
【図10】スキャン歪を生じさせるスキャン信号の例の説明図である。
【発明を実施するための形態】
【0028】
以下、本発明に係る荷電粒子線装置及びビームランディング角度の計測補正方法の一実施の形態について、測長機能を備えた走査電子顕微鏡(測長SEM:critical dimension SEM)を例に、図面とともに説明する。
【0029】
図1は、本発明の荷電粒子線装置の一実施の形態としての、測長機能を備えた走査電子顕微鏡の概略構成図である。
【0030】
走査電子顕微鏡1は、装置筺体2に、電子銃10と、電子光学系20と、試料室30と、二次電子検出器40とを備え、これら各部を処理装置50により制御する構成になっている。
【0031】
電子銃10は、荷電粒子線銃として、荷電粒子の一種である電子を発生し、荷電粒子線としての電子線3を放出する。電子光学系20は、荷電粒子光学系として、集束レンズ21,対物レンズ22,偏向器23を含む。電子銃10から放出される電子線3は、電子光学系20の集束レンズ21,対物レンズ22によって集束され、偏向器23によって偏向されて、試料室30内に配置された試料面上に照射される。
【0032】
試料室30には、電子線3が照射される観察・計測対象の試料が収容される。この観察・計測対象の試料の中には、図9に示したキャリブレーションサンプルとしての試料5も含まれる。試料室30には、試料5を含む観察・計測対象の試料が搭載されるステージ31が設けられ、ステージ31には、ステージ機構32が付設されている。ステージ機構32は、ステージ移動機構として、ステージ31の位置を試料室30内で移動変位させ、試料面上における電子線3の照射位置や観察視野を移動させることができる。また、本実施の形態では、ステージ機構32は、ステージ回動機構として、ステージ31の向きを試料室30内で回動し、ステージ31に搭載されている試料の向きを逆向きも含め、試料を回転して変えることができる。なお、図1においては、ステージ31には図9に示したキャリブレーションサンプルとしての試料5が搭載されている状態が示されている。
【0033】
電子線3の照射によって試料から放出される荷電粒子の二次電子7は、荷電粒子検出器としての二次電子検出器40によって輝度信号で検出される。検出信号は、二次電子検出器40から処理装置50に供給され、この検出信号を基に、処理装置50によって試料面上における電子線3の照射領域のSEM画像が生成される。
【0034】
処理装置50は、例えばコンピュータ装置等によって構成され、装置各部と接続されている一方、ユーザーインターフェースとしての入出力装置60とも接続されている。入出力装置60は、表示機器としてのディスプレイ61と、マウス,キーボード等といった操作機器62とを含む。
【0035】
処理装置50は、上述したSEM画像の取得をはじめとする各処理を走査電子顕微鏡1に行わせるため、その各部を制御する。
【0036】
例えば、処理装置50は、測定倍率の調整やフォーカス調整を行うため、電子光学系20の集束レンズ21や対物レンズ22を制御する。また、試料5を含めた観察・計測対象の試料に対する電子線3の入射角度、すなわちランディング角度が予め設定された観察方向に該当する設定値となるように、偏向器23を制御して電子線3の偏向いわゆるビームチルトを行う。
【0037】
その一方で、処理装置50は、試料上での電子線3の照射位置や観察視野を移動させるため、ステージ機構32を制御して、ステージ31を試料室30内で2次元的又は3次元的に移動させる。また、処理装置50は、このステージ機構32によるステージ移動を行わずに、電子線3の照射位置や観察視野を試料上での観測点に対して正確に移動させるため、電子線3の試料上での照射位置(走査位置)を偏向器23によって変えるイメージシフトも行う。
【0038】
処理装置50は、このような試料に対する電子線3の照射走査に対応して二次電子検出器40から供給される検出信号を基に、試料上における電子線3の照射領域のSEM画像を生成し、この生成したSEM画像データやその生成に用いた前述した測定倍率等の観察条件データ,検出信号データ等を、その観察した試料と対応付けて記憶部51に保存・蓄積したり、入出力装置60のディスプレイ61に表示出力したりする。
【0039】
加えて、処理装置50は、入出力装置60の操作機器62及びディスプレイ61を用いて、SEM画像上でパターン寸法の計測箇所が指定されると、このSEM画像の該当部分の検出信号データ等を用いてSEM画像の倍率データを基に計測箇所のパターン寸法を算出して測定し、この測定寸法データや計測箇所の指定データ等をこのSEM画像や観察した試料に対応付けてその記憶部51に保存・蓄積したり、入出力装置60のディスプレイ61に表示出力したりする。
【0040】
さらに、本実施の形態に係る走査電子顕微鏡1では、処理装置50は、特許文献1に記載されている電子線3のランディング角度の計測補正処理を行うために、電子線3のランディング角度計測部,ランディング角度補正部として機能する。
【0041】
すなわち、処理装置50は、図9に示したような形状既知のピラミッドパターン90が形成された試料5を用い、電子線3のランディング角度の計測補正処理の実行が指示されたときは、まず、電子線3のランディング角度計測部として、設定された所望の観察方向に電子線3をビームチルトして試料5のピラミッドパターン90部分をイメージシフトで観察することにより、そのSEM画像を取得する。そして、このSEM画像上でのピラミッドパターン90の幾何学的な変形を基に、その際における試料5に対する電子線3のランディング角度を推定する。なお、この電子線3のランディング角度の計測補正処理の実行指示は、入出力装置60の操作機器62の操作、又は予め設定された実行条件の充足に基づき行われる。また、所望の観察方向の設定は、電子線3のランディング角度の設定により行われる。
【0042】
具体的に、所望の観察方向に該当する電子線3のランディング角度が設定値として設定されると、処理装置50は、例えば、予め記憶部51に記憶されている電子線3のランディング角度と電子線3の傾斜角度との関係データテーブルを基に、設定値の電子線3のランディング角度に対応する電子線3の傾斜角度になるように電子線3のビームチルトを偏向器23により行って、ピラミッドパターン90部分のSEM画像をイメージシフトで取得する。
【0043】
そして、処理装置50は、電子線3のランディング角度の計測を、例えば、電子線3をビームチルトしていない状態(電子線3が試料5に垂直に入射される状態)でピラミッドパターン90をイメージシフトすることにより得られるSEM画像上のピラミッドパターン90に係る画像データと、偏向器23によって設定値に対応して電子線3をビームチルトして取得したSEM画像上のピラミッドパターン90に係る画像データとを用いて、この設定値に対応して取得したSEM画像上でのピラミッドパターン90の幾何学的な変形を基に、この設定値に対応して取得したSEM画像の電子線3のランディング角度を推定する。
【0044】
処理装置50は、この設定値に対応して取得したSEM画像の電子線3のランディング角度を推定すると、電子線3のランディング角度補正部として、例えば、この設定値に対応した電子線3の傾斜角度がこの推定された電子線3のランディング角度に対応する電子線3の傾斜角度になるように、記憶部51の関係データテーブルに記憶されている電子線3のランディング角度と電子線3の傾斜角度との対応関係を補正し、実際の電子線3のランディング角度が設定した電子線3のランディング角度になるように合わせる。
【0045】
加えて、処理装置50は、これら各種処理の設定や実行等を選択し又は指示するためのGUI(Graphical User Interface)画面を、入出力装置60のディスプレイ61にOSD(On-Screen Display)表示するようにもなっている。
【0046】
さらに、本実施の形態に係る走査電子顕微鏡1では、処理装置50が、電子線3のランディング角度計測部,ランディング角度補正部として、上述したようにキャリブレーションサンプルとしての試料5を用いて、上述した電子線3のランディング角度の計測補正処理を行うに際して、同じく図9に示したピラミッドパターン90が形成された試料5をキャリブレーションサンプルとして用いて、スキャン歪によるランディング角度の測定誤差を抑制するスキャン歪測定誤差抑制処理、及びピラミッドパターン90が形成された試料面の傾斜によるランディング角度の測定誤差を抑制するパターン傾斜測定誤差抑制処理を行う。
【0047】
処理装置50は、スキャン歪測定誤差抑制処理を行い、上述した電子線3のランディング角度の計測部により計測されるランディング角度、及びランディング角度補正部により補正される電子線3のランディング角度と電子線3の傾斜角度との対応関係を、スキャン歪の影響による測定誤差を抑制した電子線3のランディング角度に基づいたものにするとともに、パターン傾斜測定誤差抑制処理を行い、キャリブレーションサンプルとしての試料5の試料面とそのピラミッドパターン90との間に生じた傾斜の影響による測定誤差を抑制して、電子線3の絶対的な傾斜角度のみに基づくものにする。
【0048】
ここでは、電子線3の絶対的な傾斜角度とは、電子線を故意に偏向していない状態での電子線放出方向、すなわち電子光学系20の光軸方向をz軸とし、このz軸に直交し、かつ互いに直交したx軸及びy軸を有する絶対座標系上での、電子光学系20の光軸すなわちz軸に対する電子線3の光軸の傾斜角度を指す。
【0049】
次に、本実施の形態による走査電子顕微鏡1において、処理装置50が行うランディング角度のスキャン歪による測定誤差抑制処理、及びランディング角度のパターン傾斜による測定誤差抑制処理について説明する。
【0050】
本実施の形態による走査電子顕微鏡1では、処理装置50がランディング角度計測部,ランディング角度補正部として機能し、特許文献1に記載されている電子線3のランディング角度の計測補正処理を行い、キャリブレーションパターンとしてのピラミッドパターン90に係るSEM画像を取得する際に、予めランディング角度のスキャン歪による測定誤差抑制処理、及びキャリブレーションパターンのパターン傾斜による測定誤差抑制処理を行うことにより、SEM画像に発生するスキャン歪による測定誤差の問題、及びパターン傾斜による測定誤差の問題を解決して、キャリブレーションサンプルの試料面に対する荷電粒子線のランディング角度を荷電粒子線の絶対的な傾斜角度によって高精度に制御することができる。
【0051】
<スキャン歪によるランディング角度の測定誤差抑制処理>
まず、スキャン歪によるランディング角度の測定誤差抑制処理について説明する。
スキャン歪は、電子線3を走査するためのスキャン信号が受ける外乱や,スキャン信号自体の応答速度の変化等から、試料の観察部分がその取得したSEM画像においては歪んでしまう現象である。
【0052】
図2は、キャリブレーションサンプルとして図9に示したピラミッドパターン90が形成されている試料5を用いた場合を例に、スキャン歪の影響を模式的に示した説明図である。なお、ここでは、説明簡便のため、ピラミッドパターン90が形成された試料面は、シリコンウェーハの結晶方位面((100)面)に合致しているものとして説明する。図中の矢印は、電子線3のラスタースキャン方向を表わす。
【0053】
図2(a)は、スキャン歪が生じていない場合の、図9に示した試料5のピラミッドパターン90部分をイメージシフトで観察したトップダウンSEM画像900である。
【0054】
この場合、ピラミッドパターン90とウェーハ面との交線P1P2,P2P4,P4P3,P3P1で表れるピラミッドパターン90の開口部は正方形状に現れ、頂点P0とその他の頂点P1〜P4とを結ぶ直線P0P1,P0P2,P0P3,P0P4で表れるピラミッドパターン90の4つの谷線は、試料面に正方形状に表れた開口部の対角線として現れる。したがって、ピラミッドパターン90の底頂部P0は、正方形状に現れた開口部の中央(中心)Oに現れる。
【0055】
これに対して、図2(b)は、スキャン歪が生じている場合の、図9に示した試料5のピラミッドパターン90部分を、イメージシフトによる電子線3のスキャン方向をラスターローテーションにより変更して、それぞれローテーション角度RRを変えて観察したトップダウンSEM画像901(RR00),901(RR180),901(RR90),901(RR270)である。
【0056】
SEM画像901(RR00)はローテーション角度RRが0°のトップダウンSEM画像を、SEM画像901(RR180)はローテーション角度RRが180°のトップダウンSEM画像を、SEM画像901(RR90)はローテーション角度RRが90°のトップダウンSEM画像を、SEM画像901(RR270)はローテーション角度RRが270°のトップダウンSEM画像をそれぞれ示す。
【0057】
そこで、図2(a)に示したスキャン歪が生じていない場合のSEM画像900のピラミッドパターン90の底頂部P0を基に、図2(b)に示したスキャン歪が生じている場合のSEM画像901(RR00),901(RR180),901(RR90),901(RR270)それぞれのピラミッドパターン90の底頂部P0を比較してみると、次のようになる。
【0058】
SEM画像901(RR00)の場合、その底頂部P0(RR00)は、画像上の座標系のx軸方向(電子光学系20の光軸方向を基準とした絶対座標系上のx軸方向に対応する)に係り、SEM画像900の底頂部P0の位置よりも、画像上の横方向に、左側にオフセットして現れている。一方、画像上の座標系のy軸方向(電子光学系20の光軸方向を基準とした絶対座標系上のy軸方向に対応する)に係っては、その底頂部P0(RR00)は、SEM画像900の底頂部P0の位置に対し、画像上の縦方向に、上下に顕著なオフセットは見受けられない。
【0059】
SEM画像901(RR180)の場合、その底頂部P0(RR180)は、画像上の座標系のx軸方向に係り、SEM画像900の底頂部P0の位置よりも、画像上の横方向に、SEM画像901(RR00)の場合とは反対に、右側にオフセットして現れている。一方、画像上の座標系のy軸方向に係っては、その底頂部P0(RR180)は、SEM画像900の底頂部P0の位置に対し、SEM画像901(RR00)の場合と同様に、画像上の縦方向に、上下の顕著なオフセットは見受けられない。
【0060】
SEM画像901(RR90)の場合、その底頂部P0(RR90)は、画像上の座標系のy軸方向に係り、SEM画像900の底頂部P0の位置よりも、画像上の縦方向に、上側にオフセットして現れている。一方、画像上の座標系のx軸方向に係っては、その底頂部P0(RR90)は、SEM画像900の底頂部P0の位置に対し、画像上の横方向に、左右の顕著なオフセットは見受けられない。
【0061】
SEM画像901(RR270)の場合、その底頂部P0(RR270)は、画像上の座標系のy軸方向に係り、SEM画像900の底頂部P0の位置よりも、画像上の縦方向に、SEM画像901(RR90)の場合とは反対に、下側にオフセットして現れている。一方、画像上の座標系のx軸方向に係っては、その底頂部P0(RR270)は、SEM画像900の底頂部P0の位置に対し、SEM画像901(RR90)の場合と同様に、画像上の横方向に、左右の顕著なオフセットは見受けられない。
【0062】
このように、図示の例では、いずれのローテーション角度RRの場合も、試料5のピラミッドパターン90の開口部の形状は、スキャン開始側がスキャン終了側よりも歪の影響が大きくなっている。そのため、例えばSEM画像901(RR00),SEM画像901(RR180)のように、イメージシフトのスキャン方向が画面上の左右に互いに反対向きになれば、歪の影響が大きい部分と小さい部分とは画面上の左右で逆になっている。また、SEM画像901(RR90)とSEM画像901(RR270)のように、イメージシフトのスキャン方向が画面上の上下で互いに反対向きに変われば、歪の影響が大きい部分と小さい部分とは画面上の上下で逆になる。
【0063】
なお、図2(a)に示したスキャン歪が生じていない場合のSEM画像900については、イメージシフトによる電子線3のスキャン方向を、そのローテーション角度RRを、0°,180°,90°,270°と同様に変更してラスターローテーションしてみても、それぞれのSEM画像900(RR00),900(RR180),900(RR90),900(RR270)におけるピラミッドパターン90の形状は変化せず、各頂点P0〜P4の画像上の位置も変化しない。
【0064】
このように、スキャン歪の影響は、SEM画像を取得する際の電子線3のスキャン方向に依存するため、各スキャン方向からイメージシフトで撮像したSEM画像901(RR00),901(RR180),901(RR90),901(RR270)それぞれの画像の結果を平均化することで、スキャン歪の影響を抑制することが可能となる。
【0065】
そこで、本実施の形態では、スキャン歪の影響を抑制したイメージシフトを行って、図2(a)に示したスキャン歪が生じていない場合の本来のSEM画像900のようなSEM画像を得るために、処理装置50は、次に述べるような、スキャン歪によるランディング角度の測定誤差抑制処理を行うようになっている。
【0066】
処理装置50は、このスキャン歪によるランディング角度の測定誤差抑制処理では、まず、キャリブレーションパターン画像取得部として、キャリブレーションサンプルとしてのピラミッドパターン90の試料面上の位置、例えば図2(a)に示したような本来のピラミッドパターン90の頂点P0に該当する試料面上の位置に観察位置を合わせ、ラスターローテーションによりローテーション角度RRを少なくとも対極する2方向に変化させて、ローテーション角度RR毎のピラミッドパターン90のSEM画像901をそれぞれイメージシフトで取得する。本実施の形態では、ローテーション角度RRを0°,180°,90°,270°と変化させて、図2(b)に示したSEM画像901(RR00),901(RR180),901(RR90),901(RR270)のように、画像上のx軸方向,y軸方向それぞれの対極する2方向のSEM画像901を取得する。なお、本実施の形態では、ランディング角度の測定誤差抑制処理を、偏向器23による電子線3のスキャン方向それぞれの対極する2方向に対応して行うために画像上のx軸方向,y軸方向それぞれの対極する2方向のSEM画像901を取得するが、例えばスキャン方向それぞれのスキャン歪の影響に変わりがないならば、x軸方向,y軸方向いずれかの対極する2方向だけでも、ランディング角度の測定誤差抑制処理の実行は可能である。
【0067】
そして、処理装置50は、前述した電子線3のランディング角度の計測補正処理の場合と同様に、電子線3のランディング角度計測部として、SEM画像901(RR00),901(RR180),901(RR90),901(RR270)それぞれのピラミッドパターン90について、それぞれのピラミッドパターン90の幾何学的な変形を基に、SEM画像901(RR00),901(RR180),901(RR90),901(RR270)をそれぞれ取得した際における、試料5に対する電子線3の入射角度、すなわち電子線3のランディング角度を推定する。
【0068】
これにより、処理装置50は、ピラミッドパターン90についてSEM画像901(RR00),901(RR180),901(RR90),901(RR270)それぞれと同じ形状を得るときに観察方向として設定する、試料5の試料面に対する電子線3のランディング角度、並びに電子線3の傾斜角度を得ることができる。
【0069】
図3は、イメージシフト量と電子線の傾斜角度との関係の特性図である。
図3(a)は、SEM画像901(RR00),901(RR180),901(RR90),901(RR270)それぞれを基に推定した電子線3のランディング角度それぞれに係り、画面上の左右方向に対応する絶対座標系上のx軸方向のイメージシフト量と、推定した電子線のランディング角度に対応したx軸方向の電子線3の傾斜量との関係を示した特性図である。
【0070】
図3(b)は、同じくSEM画像901(RR00),901(RR180),901(RR90),901(RR270)それぞれを基に推定した電子線3のランディング角度それぞれにおいて、画面上の上下方向に対応する絶対座標系上のy軸方向のイメージシフト量と、推定した電子線の傾斜角度に対応したy軸方向の電子線3の傾斜量との関係を示した特性図である。
【0071】
図中、i(RR00),ii(RR180),iii(RR90),iv(RR270)で示した特性それぞれは、SEM画像901(RR00),901(RR180),901(RR90),901(RR270)それぞれを基に推定した各電子線3のランディング角度での、x軸方向若しくはy軸方向のイメージシフト量と、対応するx軸方向若しくはy軸方向の電子線3の傾斜量、すなわち電子線3の傾斜角度のx軸方向成分若しくはy軸方向成分との関係を示している。
【0072】
ここで、画像の結果として、各スキャン方向からイメージシフトで撮像したSEM画像901(RR00),901(RR180),901(RR90),901(RR270)それぞれの画像の結果を平均化することは、スキャン信号に関しては、画像901(RR00),901(RR180),901(RR90),901(RR270)それぞれを基に推定した電子線3のランディング角度それぞれを平均化したランディング角度で、かつx軸方向及びy軸方向に関して特性i(RR00),ii(RR180),iii(RR90),iv(RR270)を平均化した特性のスキャン信号で、ピラミッドパターン90のSEM画像をイメージシフトで取得することに該当する。
【0073】
そこで、当初に観察位置を合わせた際に設定された、試料5に対する電子線3のランディング角度に対応する電子線3の傾斜角度を、この平均化した電子線3のランディング角度に対応する電子線3の傾斜角度に合わせるようにし、スキャン信号をx軸方向及びy軸方向に関して特性i(RR00),ii(RR180),iii(RR90),iv(RR270)を平均化した特性に対応したイメージシフト量に対する電子線3の傾斜角度を生成するスキャン信号にすることにより、図2(b)に示したSEM画像901(RR00)は、スキャン歪の影響が抑制され、図2(a)に示したスキャン歪が生じていない場合の本来のSEM画像900に近づけることができる。
【0074】
そのため、処理装置50は、各ローテーション角度RR0°,180°,90°,270°毎のSEM画像901(RR00),901(RR180),901(RR90),901(RR270)それぞれを取得した際における、試料5に対する電子線3の入射角度、すなわち電子線3のランディング角度を推定したならば、スキャン歪測定誤差抑制部として、まず、これらそれぞれの電子線3のランディング角度を平均化する。そして、処理装置50は、この平均化した推定ランディング角度に対応する電子線の傾斜角度に、当初に観察位置を合わせた際に設定された、試料5に対する電子線3のランディング角度に対応する電子線3の傾斜角度を補正して蓄積する。
【0075】
次に、処理装置50は、イメージシフトを行うためのスキャン信号がスキャン歪の影響が抑制されたものになるように、スキャン信号を、上述したi(RR00),ii(RR180),iii(RR90),iv(RR270)で示した特性を平均化した特性のイメージシフト量毎に対応した電子線3の傾斜角度を発生させるように補正して蓄積する。
【0076】
そして、処理装置50は、測定精度を向上させるため、試料5の試料面上の別の位置にも観察するピラミッドパターン90が形成されている測定点がある場合は、このピラミッドパターン90についても、キャリブレーションパターン画像取得部、電子線3のランディング角度計測部、スキャン歪測定誤差抑制部として同様なランディング角度の測定誤差抑制処理を行う。
【0077】
その後、処理装置50は、試料5の試料面上の測定点全てのピラミッドパターン90についてのランディング角度の測定誤差抑制処理を終えたならば、測定点毎の補正して蓄積した電子線3の傾斜角度、及びスキャン信号をさらに平均化して、スキャン歪の影響を抑制した電子線3の傾斜角度、及びスキャン信号の精度を向上させる。
【0078】
そして、これらの測定結果を利用して装置毎にビーム傾斜補正等を行い、装置間測長値差を低減させることが可能となる。
【0079】
これに対し、従来の測長機能を備えた走査電子顕微鏡では、イメージシフトによる電子線3のスキャン方向を対極する2方向に変化させることなく、所定の単一のスキャン方向、例えばローテーション角度RRを0°で取得したキャリブレーションパターンのSEM画像901(RR00)のみを用いて、処理装置50が、電子線3のランディング角度の計測補正部として、電子線3のランディング角度の計測補正処理を行っていたため、そのランディング角度計測部が推定するランディング角度や、ランディング角度補正部が補正する電子線3のランディング角度と電子線3の傾斜角度との対応は、スキャン歪によるオフセットを加味した値となり、測定誤差となっていた。
【0080】
<パターン傾斜によるランディング角度の測定誤差抑制処理>
次に、ランディング角度のパターン傾斜による測定誤差抑制処理について説明する。
キャリブレーションサンプルにおけるウェーハ面と結晶方位面とのずれは、キャリブレーションサンプルとしての試料5毎に異なる。
【0081】
図4は、キャリブレーションパターンがシリコンウェーハの結晶方位面に合致していないウェーハ面に形成されたキャリブレーションサンプルの観察時のパターン断面図である。
【0082】
図4(a)は、キャリブレーションサンプルを予め設定された所定の向きであるウェーハロード角度を0°にしてステージ31に搭載し、試料室30内に配置した状態を示す一方、図4(b)は、キャリブレーションサンプルをこのウェーハロード角度0°とは逆向きの対極するウェーハロード角度を180°にしてステージ31に搭載し、試料室30内に配置した状態を示す。
【0083】
図4においては、試料5の試料面、すなわちピラミッドパターン90が形成されたシリコンウェーハのウェーハ面5sが、その結晶方位面((100)面)すなわちピラミッドパターン90に対して傾斜角αで傾いており、電子線3が試料5の試料面5sに対してランディング角度θで入射している場合を示している。
【0084】
なお、ここでは、簡便のため、試料5の法線、すなわちピラミッドパターン90が形成された試料面5sの法線は電子光学系20の光軸方向と平行であり、電子線3の試料面5sに対するランディング角度θの大きさは、電子線3の傾斜角度の大きさに対応しているものとして説明する。
【0085】
この場合、図4(a),図4(b)に示すように、試料5の試料面5sすなわちシリコンウェーハの試料面(ウェーハ面)5sとその結晶方位面((100)面)との傾斜角αは、ウェーハロード角度が変わっても、ウェーハ内であるならば面内同一である。したがって、試料5をウェーハロード角度0°と180°とで互いに逆向きに180°回転させて試料室30内に配置すると、各ウェーハロード角度0°, 180°における結晶方位面((100)面)の試料面(ウェーハ面)5sに対する傾斜は、試料面5sの法線を軸に対称になっている。
【0086】
ここで、試料5に係るウェーハロード角度0°,180°それぞれのウェーハロード状態で、処理装置50が前述した電子線3のランディング角度計測部として機能することにより計測される、試料面5sに対する電子線3のランディング角度を、それぞれランディング角度T00,T180とする。
【0087】
例えば、このランディング角度T00の推定は、ランディング角度計測部としての処理装置50が、ウェーハロード角度0°で試料室30内に配置された試料5に対して、予め設定された観察方向、すなわち図示の例では電子線3の傾斜角度をθにビームチルトして、試料5のピラミッドパターン90部分をイメージシフトで観察することにより、そのSEM画像を取得する。そして、この取得した電子線3の傾斜角度をθとするSEM画像上でのピラミッドパターン90の幾何学的な変形を基に、その際における試料5に対する電子線3のランディング角度T00が推定される。ランディング角度T180の推定についても同様である。
【0088】
したがって、ウェーハロード角度が0°,180°それぞれの試料5の配置状態における、ピラミッドパターン90の幾何学的な変形を基にした電子線3のランディング角度計測部によるランディング角度計測処理において、結晶方位面((100)面)との傾斜角αは、逆転して計測されることになる。
【0089】
すなわち、ウェーハロード角度0°,180°それぞれの試料5の配置状態における電子線3のランディング角度T00,T180は、
T0=電子線3のランディング角度θ+ピラミッドパターン90の傾斜角度α
T180=電子線3のランディング角度θ−ピラミッドパターン90の傾斜角度α
α:試料面5sに対する結晶方位面((100)面)の傾斜角度、
θ:予め設定された観察方向に対応する電子線3の傾斜角度、
で表わされる。
【0090】
したがって、この場合、試料面5sの法線は電子光学系20の光軸方向と平行であることであるから、試料面5sに対する電子線3のランディング角度θ、すなわちこの電子線3のランディング角度θに対応する予め設定された観察方向に対応する電子線3の絶対的な傾斜角度θのみを求めるには、ウェーハロード角度0°で計測された電子線3のランディング角度T00と、ウェーハロード角度180°で計測された電子線3のランディング角度T180とを平均化すればよく、
電子線の絶対的な傾斜角度θ=(T0 + T180)÷2
となる。
【0091】
そこで、本実施の形態では、電子線3のランディング角度θに対応する予め設定された観察方向に対応する電子線3の絶対的な傾斜角度θのみを求めるために、処理装置50は、次に述べるようなランディング角度のパターン傾斜による測定誤差抑制処理を行うようになっている。
【0092】
処理装置50は、このスキャン歪によるランディング角度の測定誤差抑制処理では、まず、キャリブレーションパターン画像取得部として、ピラミッドパターン90が形成された試料5の、ピラミッドパターン90がそれぞれ対極するウェーハロード角度0°,180°で配置された状態それぞれのSEM画像を取得する。なお、これらSEM画像の取得にあたっては、試料5のロード方向をそれぞれ逆向きにしてステージ31に搭載し直してもよいし、ステージ機構32によって試料5が搭載されたステージ31ごと逆向きにすることも可能である。
【0093】
そして、処理装置50は、前述した電子線3のランディング角度の計測補正処理の場合と同様に、電子線3のランディング角度計測部として、それぞれ対極するウェーハロード角度0°,180°で配置された状態で取得されたそれぞれSEM画像上でのピラミッドパターン90の幾何学的な変形を基に、ウェーハロード角度0°,180°それぞれの対極の配置状態における電子線3のランディング角度T00,T180を計測する。
【0094】
その上で、処理装置50は、パターン傾斜測定誤差抑制部として、これら電子線3のランディング角度T00,T180を平均化することにより、試料面5sと結晶方位面((100)面)との傾斜角αによる影響を抑制して、試料面5sに対する電子線3のランディング角度を電子線3の絶対的な傾斜角度によって高精度に計測する。
【0095】
<測定誤差抑制処理の実施例>
以下に、図1に示した本実施の形態に係る走査電子顕微鏡1での、上述したスキャン歪によるランディング角度の測定誤差抑制処理、並びにパターン傾斜によるランディング角度の測定誤差抑制処理の実施例について、フローチャートに基づき説明する。
【0096】
図5は、走査電子顕微鏡で行われるスキャン歪によるランディング角度の測定誤差抑制処理のフローチャートである。
【0097】
処理装置50は、スキャン歪によるランディング角度の測定誤差抑制処理の開始が指示されると、試料面にピラミッドパターン90が形成された試料5を試料室30内にロードし、ステージ31に搭載する(S501)。そして、処理装置50は、試料5に係る既知の試料データを基にステージ機構32を制御して ステージ31に搭載された試料5の目的のピラミッドパターン90が画像中央になるように、ステージ31を移動する(S502)。ここでの位置合わせは、例えば、試料面上における目的のピラミッドパターン90の中心(中央)の底頂部P0を、電子光学系の20の光軸上に位置させるように、ステージ31を移動することにより行われる。
【0098】
処理装置50は、目的のピラミッドパターン90が上述した所定位置に配置されたならば、フォーカスを集束レンズ21及び対物レンズ22で調整した上で、ラスターローテーションのローテーション角度RRを0°にして、偏向器23によるイメージシフトにより、目的のピラミッドパターン90を電子線3でスキャンする(S503)。
【0099】
そして、処理装置50は、この電子線3のスキャンに関連して、二次電子検出器40から供給される検出信号を基に、ローテーション角度RRが0°(RR00)の、ピラミッドパターン90のSEM画像901(RR00)を生成し、取得する(S504)。
【0100】
処理装置50は、SEM画像901(RR00)を取得したならば、このローテーション角度RRが0°(RR00)のSEM画像901(RR00)上におけるピラミッドパターン90の幾何学的変形を基に、試料5の試料面に対する電子線3のランディング角度を推定し、この推定した電子線3のランディング角度におけるイメージシフト量と電子線の傾斜角度との関係の特性i(RR00)とともに蓄積する(S505)。
【0101】
その後、処理装置50は、スキャン方向を相互に反対向きに変えた、予め設定されている対極する方向での、この場合はローテーション角度RRが0°(RR00),180°(RR180),90°(RR90),270°(RR270)での電子線3のランディング角度の推定が全てが完了したか否かを確認する(S506)。
【0102】
処理装置50は、この確認により、全てが完了していない場合は、ローテーション角度RRを残りのローテーション角度RRにラスターローテーションを設定し(S507)、残りのローテーション角度RRそれぞれについて、ステップS503〜S506の処理を繰り返し行う。
【0103】
これに対し、処理装置50は、予め設定されている対極する方向での正逆2方向によるラスターローテーションによる電子線3のランディング角度の推定が完了した場合には、各方向で推定した傾斜角度、及び各推定した電子線3のランディング角度におけるイメージシフト量と電子線の傾斜角度との関係の特性i(RR00),ii(RR180),iii(RR90),iv(RR270)をそれぞれ平均化して、スキャン歪みの影響を抑制させた電子線3の傾斜角度、及びこのスキャン歪みの影響を抑制させた電子線3の傾斜角度でのイメージシフト量と電子線の傾斜角度との関係特性を求める(S508)。
【0104】
より具体的には、処理装置50は、ラスターローテーションのローテーション角度RRが0°,180°,90°,270°それぞれで推定した電子線3のランディング角度を平均化する。同様に、処理装置50は、ラスターローテーションのローテーション角度RRが0°,180°,90°,270°それぞれで推定した電子線3のランディング角度それぞれに対応するイメージシフト量と電子線の傾斜角度との関係の特性i(RR00),ii(RR180),iii(RR90),iv(RR270)も平均化する。
【0105】
そして、処理装置50は、この平均化した推定ランディング角度に対応する電子線の傾斜角度に、当初に観察位置を合わせた際に設定された試料5に対する電子線3のランディング角度に対応する電子線3の傾斜角度がなるように補正し、スキャン信号を平均化した特性のイメージシフト量毎に対応した電子線3の傾斜角度を発生させるように補正して蓄積する。
【0106】
したがって、この場合、ステップS502では、ピラミッドパターン90が画像中央になるように、ピラミッドパターン90の中心(中央)の底頂部P0を電子光学系の20の光軸上に位置させるようにランディング角度0°に配置されているので、偏向器23によって電子線3を故意に偏向していない状態で、イメージシフトのためのスキャン信号だけで偏向器23により電子線3の偏向を行った場合の、シフト中間の、画像中央に対応する電子線3の傾斜角度としてのランディング角度0°は、この平均化した推定ランディング角度に該当することになる。
【0107】
そして、スキャン信号は、この平均化した推定ランディング角度をイメージシフトの中央位置とし、図3に示したRR00,RR180,RR90,RR270で示した特性それぞれを平均化した特性のイメージシフト量毎に対応した電子線3の傾斜角度を反映するスキャン信号に補正すれば、スキャン歪みの影響を抑制することができる。
【0108】
その上で、本実施例においては、処理装置50は、さらに高精度にスキャン歪みの影響を抑制するために、試料5の試料面上の別の位置にも観察するピラミッドパターン90が形成されている測定点があるか否かを、試料5に係る既知の試料データを基に判別する(S509)。
【0109】
そして、処理装置50は、他に測定点がある場合は、他の測定点についても、ステップS502〜S509の処理を繰り返し行う。これに対し、試料5の試料面上の測定点全てのピラミッドパターン90についてステップS502〜S509の処理を終えたならば、測定点毎の蓄積した電子線3の傾斜角度、及びスキャン信号をさらに平均化して、スキャン歪の影響を抑制した電子線3の傾斜角度、及びスキャン信号の精度を向上させる(S510)。
【0110】
図6は、走査電子顕微鏡で行われるランディング角度のパターン傾斜による測定誤差抑制処理のフローチャートである。
【0111】
処理装置50は、ランディング角度のパターン傾斜による測定誤差抑制処理の開始が指示されると、試料面にピラミッドパターン90が形成された試料5を試料室30内にウェーハロード角度を0°にしてロードし、ステージ31に搭載する(S601)。そして、処理装置50は、試料5に係る既知の試料データを基にステージ機構32を制御して ステージ31に搭載された試料5の目的のピラミッドパターン90が画像中央になるように、ステージ31を移動する(S602)。ここでの位置合わせは、例えば、試料面上における目的のピラミッドパターン90の中心(中央)の底頂部P0を、電子光学系の20の光軸上に位置させるように、ステージ31を移動することにより行われる。
【0112】
処理装置50は、目的のピラミッドパターン90が上述した所定位置に配置されたならば、フォーカスを集束レンズ21及び対物レンズ22で調整した上で、ラスターローテーションのローテーション角度RRを所定角度に固定して、偏向器23によるイメージシフトにより、目的のピラミッドパターン90を電子線3でスキャンする。そして、処理装置50は、この電子線3のスキャンに関連して、二次電子検出器40から供給される検出信号を基に、ウェーハロード角度0°で配置された状態のピラミッドパターン90のSEM画像を生成し、取得する(S603)。
【0113】
処理装置50は、前述した電子線3のランディング角度の計測補正処理の場合と同様に、電子線3のランディング角度計測部として、ウェーハロード角度0°で配置された状態で取得されたそれぞれSEM画像上でのピラミッドパターン90の幾何学的な変形を基に、ウェーハロード角度0°の配置状態における電子線3のランディング角度T00を計測して蓄積する(S604)。
【0114】
その後、本実施例では、処理装置50は、試料5を一旦試料室30内からアンロードし(S605)、試料5のロード方向を逆向きにしてウェーハロード角度を180°にしてから、試料5を再び試料室30内にロードし、ステージ31に搭載する(S606)。
【0115】
処理装置50は、試料5に係る既知の試料データを基にステージ機構32を制御して 先に電子線3のランディング角度T00を計測したのと同じ目的のピラミッドパターン90が画像中央になるように、ステージ31を移動する(S607)。
【0116】
そして、処理装置50は、ウェーハロード角度180°で配置された状態のピラミッドパターン90のSEM画像を生成し、取得するとともに(S608)、ウェーハロード角度180°の配置状態における電子線3のランディング角度T180を計測して蓄積する(S609)。
【0117】
その後、処理装置50は、ウェーハを0°でロードした場合の推定された電子線3のランディング角度T00と、ウェーハを180°でロードした場合の推定された電子線3のランディング角度T180とを平均化して、試料5の試料面に対するピラミッドパターン90の傾斜角度αをキャンセルした電子線3の傾斜角度θを求める(S610)。そして、処理装置50は、この蓄積された電子線3の傾斜角度θを用いることにより、試料面5sと結晶方位面((100)面)との傾斜角αによる影響を抑制して、試料面5sに対する電子線3のランディング角度を電子線3の絶対的な傾斜角度によって高精度に計測することができる。
【0118】
これにより、ピラミッドパターン90の傾斜量は、同一に切り出したウェーハ内であれば、全てのパターンが同一の傾斜量となるため、処理装置50は、一度、試料面に対するピラミッドパターン90の傾斜量αを測定し、記録しておくことにより、ピラミッドパターン90の傾斜角度をキャンセルすることができ、絶対角度の測定が可能となる。
【0119】
次に、これら測定誤差抑制処理を備えた走査電子顕微鏡1のメンテナンス処理について説明する。
【0120】
電子線3の傾斜角度は、日々の走査電子顕微鏡1の使用状況により変化する可能性がある。特に電子銃10のチップ交換や可動絞り穴交換等のメンテナンスにより大きく変化する。
【0121】
図5に示したスキャン歪によるランディング角度の測定誤差抑制処理を行うことによりスキャン歪の影響を抑制することが可能である。また、図6に示したパターン傾斜によるランディング角度の測定誤差抑制処理を行うことにより、キャリブレーションパターンとしての形状が既知の多面体構造物が形成された試料面自体の傾斜をキャンセルすることができるので、試料面に対する荷電粒子線のランディング角度を荷電粒子線の絶対的な傾斜角度によって高精度に計測することが可能である。さらに、これら手法を一緒に行うことで、スキャン歪による測定誤差を抑制し、ピラミッドパターンの傾斜をキャンセルさせて、電子線の絶対角度を測定可能となる。
【0122】
図7は、走査電子顕微鏡1で行われるメンテナンス補正処理の一実施例を示す。
走査電子顕微鏡1において、電子銃10のチップ交換や可動絞り穴交換等の装置メンテナンスが行われると(S701)、そのメンテナンス作業後、処理装置50は、図5に示したスキャン歪によるランディング角度の測定誤差抑制処理を実行する(S702)。そして、処理装置50は、ラスターローテーションのローテーション角度RRが0°,180°,90°,270°それぞれで推定した試料5のピラミッドパターン90に対する電子線3のランディング角度の平均化した値、又はさらにこれを試料5の試料面上のピラミッドパターン90が形成された測定点について平均化した値が、所定の閾値を超えているか否かについて判別する(S703)。
【0123】
この結果、処理装置50は、所定の閾値を超えている場合には、スキャン歪の影響を抑制した電子線3の傾斜角度及びスキャン信号の補正を行うとともに、入出力装置60のディスプレイ61に表示されたGUI画面上にエラー表示を行い(S704)、ステップS702のスキャン歪によるランディング角度の測定誤差抑制処理、及びステップS703の測定誤差抑制処理の完了確認処理を、平均化した値が所定の閾値以下になるまで繰り返すようになっている。
【0124】
なお、このスキャン歪によるランディング角度の測定誤差抑制処理に予め使用する試料5については、図6に示したパターン傾斜によるランディング角度の測定誤差抑制処理を行っておく。この結果、このランディング角度によるパターン傾斜の測定誤差抑制処理を行い、予め試料面(ウェーハ面)と結晶方位面とのずれを校正した試料5を使用することで、計測時間の短縮が可能である。
【0125】
これにより、絶対座標系による絶対的な電子ビームの傾斜角度を算出することができ、これらの測定結果を利用して装置毎にビーム傾斜補正等を行い、装置間測長値差を低減させることが可能となる。その際、ピラミッドパターン90が形成された同じ試料5を持ち回りしなくとも、装置毎に、装置それぞれの較正に用いるピラミッドパターン90が形成された試料5の試料面(ウェーハ面)と結晶方位面とのずれに関するモニターを実施することによって、全ての装置が常に同一の傾斜角度を維持することが可能となり、ビーム傾斜による測長値機差を低減することが可能となる。この結果、ゴールデンウェーハ等の同一サンプルで各装置を測定する必要はなくなり、どのサンプルでも高精度に絶対傾斜角度が測定できる。
【0126】
次に、走査電子顕微鏡1で行われるメンテナンス補正処理の、別の実施例について図8に基づき説明する。
【0127】
図8は、走査電子顕微鏡1で行われるメンテナンス補正処理の別の実施例のフローチャートを示す。
【0128】
本実施例では、走査電子顕微鏡1における電子線3の傾斜角度をある一定間隔でモニターすることによって、装置変動や外乱によって発生する電子線の傾斜をリアルタイムで管理することが可能になっている。また、図6に示したパターン傾斜によるランディング角度の測定誤差抑制処理が行われ、予め試料面(ウェーハ面)と結晶方位面とのずれを校正した試料5をスタブサンプルとしてステージ31上に配置することで、短時間で自動に測定することが可能になっている。
【0129】
図8において、処理装置50は、走査電子顕微鏡1としての通常運用中(通常使用中)に、計時手段として備えられているタイマを基に予め設定されたメンテナンス周期時間を計測しているとともに(S802)、このメンテナンス周期時間の計測値が予め設定されているメンテナンス時間を経過したか否かを確認している(S801)。
【0130】
処理装置50は、メンテナンス周期時間が未だ経過していない場合は、通常運用中(通常使用中)の処理を続行する一方、メンテナンス時間を経過している場合には、通常運用中(通常使用中)の処理を中断して、電子線3の照射位置や観察視野を、ステージ31に搭載された観察又は測定対象の試料上からステージ31上に配置されたスタブサンプルのピラミッドパターン90に位置合わせするように、ステージ31を自動で移動する(S803)。
【0131】
そして、処理装置50は、このピラミッドパターン90に対して、図5に示したスキャン歪によるランディング角度の測定誤差抑制処理を実行する(S804)。その上で、処理装置50は、ラスターローテーションのローテーション角度RRが0°,180°,90°,270°それぞれで推定した試料5のピラミッドパターン90に対する電子線3のランディング角度の平均化した値、又はさらにこれを試料5の試料面上のピラミッドパターン90が形成された測定点について平均化した値が、所定の閾値を超えているか否かについて判別する(S805)。
【0132】
この結果、処理装置50は、所定の閾値を超えている場合には、スキャン歪の影響を抑制した電子線3の傾斜角度及びスキャン信号の補正を行うとともに、入出力装置60のディスプレイ61に表示されたGUI画面上にエラー表示を行い(S806)、ステップS804のスキャン歪によるランディング角度の測定誤差抑制処理、及びステップS805の測定誤差抑制処理の完了確認処理を、平均化した値が所定の閾値以下になるまで繰り返す。
【0133】
そして、処理装置50は、平均化した値が所定の閾値以下になったならば、先のメンテナンス周期時間の計測値をリセットした上、電子線3の照射位置や観察視野を、ステージ31に搭載された観察又は測定対象の試料上に戻し、走査電子顕微鏡1としての通常運用の続きを行う。
なお、このスキャン歪によるランディング角度の測定誤差抑制処理に予め使用する試料5については、図6に示したパターン傾斜によるランディング角度の測定誤差抑制処理を行っておく。この結果、このランディング角度によるパターン傾斜の測定誤差抑制処理を行い、予め試料面(ウェーハ面)と結晶方位面とのずれを校正した試料5を使用することで、計測時間の短縮が可能である。
【0134】
これにより、電子線3の傾斜角度を所定の周期時間間隔でモニターすることにより、装置変動や外乱によって発生する電子線の傾斜をリアルタイムで管理することが可能となる。また、ステージ上にスタブサンプルとして設置することによって、観察又は測定対象の試料を交換する必要もなく、計測時間の短縮化が可能となる。
【0135】
なお、本発明に係る荷電粒子線装置、及び荷電粒子線のランディング角度の計測補正方法の一実施の形態は、以上詳述したとおりであるが、その各部の構成の具体的態様、手順の具体的内容については、説明中で述べた以外でも種々の変形例の適用が可能である。例えば、メンテナンス補正処理の説明では、スキャン歪によるランディング角度の測定誤差抑制処理に予め使用する試料5については、図6に示したパターン傾斜によるランディング角度の測定誤差抑制処理を行っておく構成としたが、スキャン歪によるランディング角度の測定誤差抑制処理と一緒に行うようにしてもよい。また、スキャン歪によるランディング角度の測定誤差抑制処理、パターン傾斜によるランディング角度の測定誤差抑制処理は、それぞれ一方のみを行うだけでも、従前に電子線3のランディング角度の計測補正処理の精度を向上させることが可能である。
【符号の説明】
【0136】
1 走査電子顕微鏡、 2 装置筺体、 3 電子線、 5 試料、 10 電子銃、
20 電子光学系、 21 集束レンズ、 22 対物レンズ、 23 偏向器、
30 試料室、 31 ステージ、 32 ステージ機構、 40 二次電子検出器、
50 処理装置、
【特許請求の範囲】
【請求項1】
試料面上に形成された、形状が既知の多面体構造物の荷電粒子線画像を、荷電粒子線のスキャン方向、又は当該多面体構造物が形成された試料の搭載向きを相互に反対向きに変えて取得する画像取得部と、
該画像取得部により取得された多面体構造物の荷電粒子線画像それぞれについて、画像上における多面体構造物の幾何学的な変形を基に、当該荷電粒子線画像それぞれを取得した際における試料に対する荷電粒子線のランディング角度を計測するランディング角度計測部と、
該ランディング角度計測部によって計測された多面体構造物の荷電粒子線画像それぞれのランディング角度を平均化し、当該平均化されたランディング角度を基に、前記画像取得部による荷電粒子線画像の傾斜角度を補正する測定誤差抑制部と
を備えていることを特徴とする荷電粒子線装置。
【請求項2】
前記画像取得部は、ラスタ−ローテーションによりローテーション角度を0°,180°,90°,270°と変化させて、各ローテーション角度に対応した多面体構造物の荷電粒子線画像をイメージシフトで取得する
ことを特徴とする請求項1記載の荷電粒子線装置。
【請求項3】
前記画像取得部は、試料のウェーハロード角度を0°,180°と変化させて、各ウェーハロード角度に対応した多面体構造物の荷電粒子線画像をイメージシフトで取得する
ことを特徴とする請求項1記載の荷電粒子線装置。
【請求項4】
前記測定誤差抑制部は、該ランディング角度計測部によって計測された多面体構造物の荷電粒子線画像それぞれのランディング角度を平均化するとともに、前記ランディング角度計測部によって計測された多面体構造物の荷電粒子線画像それぞれのランディング角度に対応した、前記イメージシフトの際におけるイメージシフト量と荷電粒子線の傾斜角度との関係特性を平均化することにより、当該平均化したランディング角度及び関係特性を基に、前記画像取得部による荷電粒子線画像の傾斜角度を補正する
ことを特徴とする請求項2記載の荷電粒子線装置。
【請求項5】
試料面上に形成された、形状が既知の多面体構造物の荷電粒子線画像を、荷電粒子線のスキャン方向、又は当該多面体構造物が形成された試料の搭載向きを相互に反対向きに変えてそれぞれ取得する画像取得工程、
該画像取得工程の実行により取得された多面体構造物の荷電粒子線画像それぞれについて、画像上における多面体構造物の幾何学的な変形を基に、当該荷電粒子線画像それぞれを取得した際における試料に対する荷電粒子線のランディング角度を計測するランディング角度計測工程、
該ランディング角度計測工程の実行によって計測された多面体構造物の荷電粒子線画像それぞれのランディング角度を平均化し、当該平均化されたランディング角度を基に、前記画像取得工程の実行による荷電粒子線画像の傾斜角度を補正する測定誤差抑制工程、
を有することを特徴とするランディング角度の計測補正方法。
【請求項1】
試料面上に形成された、形状が既知の多面体構造物の荷電粒子線画像を、荷電粒子線のスキャン方向、又は当該多面体構造物が形成された試料の搭載向きを相互に反対向きに変えて取得する画像取得部と、
該画像取得部により取得された多面体構造物の荷電粒子線画像それぞれについて、画像上における多面体構造物の幾何学的な変形を基に、当該荷電粒子線画像それぞれを取得した際における試料に対する荷電粒子線のランディング角度を計測するランディング角度計測部と、
該ランディング角度計測部によって計測された多面体構造物の荷電粒子線画像それぞれのランディング角度を平均化し、当該平均化されたランディング角度を基に、前記画像取得部による荷電粒子線画像の傾斜角度を補正する測定誤差抑制部と
を備えていることを特徴とする荷電粒子線装置。
【請求項2】
前記画像取得部は、ラスタ−ローテーションによりローテーション角度を0°,180°,90°,270°と変化させて、各ローテーション角度に対応した多面体構造物の荷電粒子線画像をイメージシフトで取得する
ことを特徴とする請求項1記載の荷電粒子線装置。
【請求項3】
前記画像取得部は、試料のウェーハロード角度を0°,180°と変化させて、各ウェーハロード角度に対応した多面体構造物の荷電粒子線画像をイメージシフトで取得する
ことを特徴とする請求項1記載の荷電粒子線装置。
【請求項4】
前記測定誤差抑制部は、該ランディング角度計測部によって計測された多面体構造物の荷電粒子線画像それぞれのランディング角度を平均化するとともに、前記ランディング角度計測部によって計測された多面体構造物の荷電粒子線画像それぞれのランディング角度に対応した、前記イメージシフトの際におけるイメージシフト量と荷電粒子線の傾斜角度との関係特性を平均化することにより、当該平均化したランディング角度及び関係特性を基に、前記画像取得部による荷電粒子線画像の傾斜角度を補正する
ことを特徴とする請求項2記載の荷電粒子線装置。
【請求項5】
試料面上に形成された、形状が既知の多面体構造物の荷電粒子線画像を、荷電粒子線のスキャン方向、又は当該多面体構造物が形成された試料の搭載向きを相互に反対向きに変えてそれぞれ取得する画像取得工程、
該画像取得工程の実行により取得された多面体構造物の荷電粒子線画像それぞれについて、画像上における多面体構造物の幾何学的な変形を基に、当該荷電粒子線画像それぞれを取得した際における試料に対する荷電粒子線のランディング角度を計測するランディング角度計測工程、
該ランディング角度計測工程の実行によって計測された多面体構造物の荷電粒子線画像それぞれのランディング角度を平均化し、当該平均化されたランディング角度を基に、前記画像取得工程の実行による荷電粒子線画像の傾斜角度を補正する測定誤差抑制工程、
を有することを特徴とするランディング角度の計測補正方法。
【図1】


【図2】

【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公開番号】特開2013−101797(P2013−101797A)
【公開日】平成25年5月23日(2013.5.23)
【国際特許分類】
【出願番号】特願2011−244144(P2011−244144)
【出願日】平成23年11月8日(2011.11.8)
【出願人】(501387839)株式会社日立ハイテクノロジーズ (4,325)
【Fターム(参考)】
【公開日】平成25年5月23日(2013.5.23)
【国際特許分類】
【出願日】平成23年11月8日(2011.11.8)
【出願人】(501387839)株式会社日立ハイテクノロジーズ (4,325)
【Fターム(参考)】
[ Back to top ]