
荷電粒子線装置の試料位置決め装置
【課題】試料のドリフトを抑制できる荷電粒子線装置の試料位置決め装置を提供する。
【解決手段】荷電粒子線装置の試料位置決め装置100は、減圧状態に維持可能な試料室1と、試料室1に連通する孔12を有する管状部材10と、孔12に移動可能に装着される試料ホルダー20と、試料ホルダー20に装着され、管状部材10の内面に接するOリング30と、試料室1における試料ホルダー20の位置を変える駆動機構60と、を含み、試料ホルダー20は、先端部が試料室1に配置される第1部分22と、孔12に配置される第2部分24と、を有し、第1部分22は、先端部に、試料Sを保持可能な試料保持部23を有し、第2部分24は、リニアガイドを介して、第1部分22を移動可能に支持し、Oリング30は、第2部分24に装着され、駆動機構60は、第1部分22を移動させる。
【解決手段】荷電粒子線装置の試料位置決め装置100は、減圧状態に維持可能な試料室1と、試料室1に連通する孔12を有する管状部材10と、孔12に移動可能に装着される試料ホルダー20と、試料ホルダー20に装着され、管状部材10の内面に接するOリング30と、試料室1における試料ホルダー20の位置を変える駆動機構60と、を含み、試料ホルダー20は、先端部が試料室1に配置される第1部分22と、孔12に配置される第2部分24と、を有し、第1部分22は、先端部に、試料Sを保持可能な試料保持部23を有し、第2部分24は、リニアガイドを介して、第1部分22を移動可能に支持し、Oリング30は、第2部分24に装着され、駆動機構60は、第1部分22を移動させる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、荷電粒子線装置の試料位置決め装置に関する。
【背景技術】
【0002】
電子顕微鏡で試料を原子レベルの高い観察倍率で観察する際や試料を高い精度で分析する際には、試料のドリフトが問題となる場合がある。
【0003】
試料のドリフトの原因としては、例えば、試料ホルダーやゴニオメーターなどの熱的、機械的不安定性に起因するもの、電子レンズの熱的不安定性に起因するもの、試料の変形や試料のチャージアップに起因するものなどが挙げられる。
【0004】
ここで、電子顕微鏡では、試料位置決め装置によって試料の支持および移動を行う。試料位置決め装置において、試料の支持は、一般的に、先端に試料保持部を有する試料ホルダーによって行われる。この試料ホルダーには、試料室を気密に封止するためのOリングが装着されるが、このOリングの弾性変形が、試料をドリフトさせる原因の一つとなる場合がある。具体的には、Oリングは、ゴム等の粘弾性材料からなるため、試料ホルダーの移動に伴って摺動することにより弾性変形する。弾性変形によりOリングには、応力が生じる。Oリングに生じた応力は、徐々に緩和されるため、結果として、試料ホルダーも徐々に移動し、試料がドリフトする。
【0005】
上記のようなOリングによるドリフトの影響を低減するために、例えば、特許文献1には、試料ホルダーに装着されたOリングと試料微動装置とが機械的に接触しないような構成とした電子顕微鏡が開示されている。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開昭62−98545号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
本発明のいくつかの態様に係る目的の1つは、試料のドリフトを抑制できる荷電粒子線装置の試料位置決め装置を提供することにある。
【課題を解決するための手段】
【0008】
(1)本発明に係る荷電粒子線装置の試料位置決め装置は、
減圧状態に維持可能な試料室と、
前記試料室に連通する孔を有する管状部材と、
前記孔に移動可能に装着される試料ホルダーと、
前記試料ホルダーに装着され、前記管状部材の内面に接するOリングと、
前記試料室における前記試料ホルダーの位置を変える駆動機構と、
を含み、
前記試料ホルダーは、
先端部が前記試料室に配置される第1部分と、
前記孔に配置される第2部分と、
を有し、
前記第1部分は、前記先端部に、試料を保持可能な試料保持部を有し、
前記第2部分は、リニアガイドを介して、前記第1部分を移動可能に支持し、
前記Oリングは、前記第2部分に装着され、
前記駆動機構は、前記第1部分を移動させる。
【0009】
このような荷電粒子線装置の試料位置決め装置によれば、駆動機構によって第1部分を移動させる際に、Oリングが装着された第2部分を移動させないことができる。すなわち、駆動機構によって第1部分を移動させる際に、Oリングを移動させないことができる。したがって、Oリングに応力が発生することを抑制することができ、試料のドリフトを抑制することができる。
【0010】
(2)本発明に係る荷電粒子線装置の試料位置決め装置において、
前記試料ホルダーは、前記第1部分と前記第2部分とを接続する弾性部材を有してもよい。
【0011】
このような荷電粒子線装置の試料位置決め装置によれば、弾性部材によって、第1部分を駆動機構に押しつけることができる。これにより、第1部分を安定して移動させることができる。
【0012】
(3)本発明に係る荷電粒子線装置の試料位置決め装置において、
前記試料ホルダーは、前記第1部分の移動を制限するストッパーを有してもよい。
【0013】
このような荷電粒子線装置の試料位置決め装置によれば、第1部分が第2部分から脱落することを防ぐことができる。
【0014】
(4)本発明に係る荷電粒子線装置の試料位置決め装置において、
前記試料ホルダーは、前記第2部分に接続された第3部分を、さらに有し、
前記第3部分は、前記孔の径よりも大きい幅を有してもよい。
【0015】
このような荷電粒子線装置の試料位置決め装置によれば、第3部分を、試料室の圧力と大気圧との圧力差により生じる力によって、管状部材に固定することができる。そのため、試料室の圧力と大気圧との圧力差によって試料ホルダーにかかる力を、管状部材で支えることができる。したがって、大気圧の変動による試料ホルダーの移動を抑制でき、試料のドリフトを抑制することができる。
【図面の簡単な説明】
【0016】
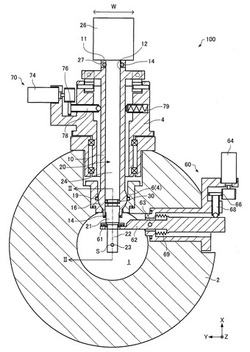
【図1】本実施形態に係る電子顕微鏡の試料位置決め装置を模式的に示す断面図。
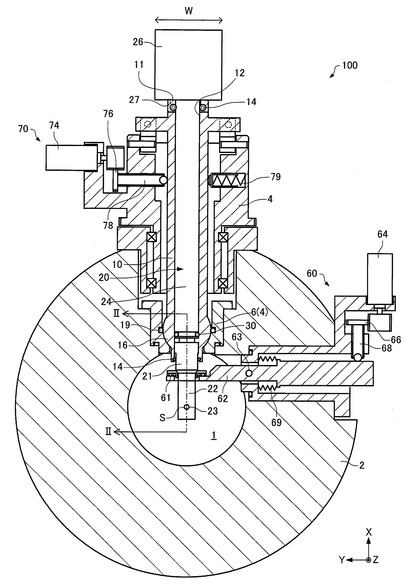
【図2】本実施形態に係る電子顕微鏡の試料位置決め装置を模式的に示す断面図。
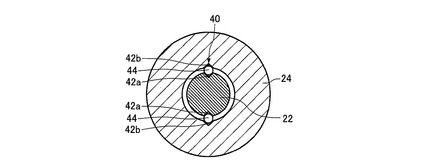
【図3】本実施形態に係る電子顕微鏡の試料位置決め装置を模式的に示す断面図。
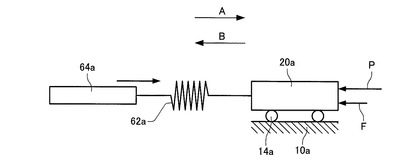
【図4】アフタードリフトを説明するための図。
【発明を実施するための形態】
【0017】
以下、本発明の好適な実施形態について図面を用いて詳細に説明する。なお、以下に説明する実施形態は、特許請求の範囲に記載された本発明の内容を不当に限定するものではない。また、以下で説明される構成の全てが本発明の必須構成要件であるとは限らない。
【0018】
1. 試料位置決め装置の構成
まず、本実施形態に係る荷電粒子線装置の試料位置決め装置の構成について図面を参照しながら説明する。図1〜図3は、本実施形態に係る荷電粒子線装置の試料位置決め装置100を模式的に示す断面図である。図2は、図1のII−II線断面図であり、図3は、図2のIII−III線断面図である。また、図1〜図3は、試料位置決め装置100の使用状態、すなわち、試料ホルダー20をシフター10に装着した状態を示している。以下、試料位置決め装置100の使用状態について説明する。なお、本実施形態では、試料位置決め装置100は、透過型電子顕微鏡の試料位置決め装置である。
【0019】
試料位置決め装置100は、図1に示すように、試料室1と、管状部材(以下「シフター」ともいう)10と、試料ホルダー20と、Oリング30と、X駆動機構60と、Y駆動機構70と、を含む。試料位置決め装置100は、さらに、シフター支持部材4を含むことができる。
【0020】
試料位置決め装置100では、試料室1は、図1に示すように、壁部2によって囲まれている。シフター10は、壁部2を貫通するように設けられたシフター支持部材4によって支持されている。シフター10は、試料室1に連通する孔12を有しており、試料ホルダー20は、この孔12に移動可能に装着されている。試料ホルダー20にはOリング30が装着され、試料ホルダー20とシフター10との間が気密に封しされている。試料ホルダー20は、先端部が試料室1に配置されている第1部分22を有しており、X駆動機構60は、この第1部分22を移動させることにより、試料SをX軸方向に沿って移動させる。Y駆動機構70は、シフター10を回動させることにより試料SをY軸方向に沿って移動させる。
【0021】
試料位置決め装置100は、試料Sを試料室1の所望の位置へ移動および静止させることができる。具体的には、試料位置決め装置100は、試料ホルダー20によって試料Sを支持し、駆動機構60,70によってX,Y軸方向に対して、試料Sを直線的に移動させることができる。また、試料位置決め装置100は、Z駆動機構(図示しない)によって、Z軸方向に対して、試料Sを直線的に移動させてもよいし、傾斜機構(図示しない)によって、試料SをX軸周りに傾斜させてもよい。なお、図示の例において、Z軸方向は、試料室1を通過する電子線(図示しない)の進行方向である。
【0022】
試料室1は、減圧状態に維持可能である。試料室1は、公知のポンプ(図示しない)によって真空排気されることにより減圧状態に維持される。試料室1には、試料ホルダー20によって試料Sが導入される。そして、試料室1において、試料Sに電子線が照射される。
【0023】
シフター支持部材4は、壁部2を貫通する円筒状の部材である。シフター支持部材4には、シフター10が挿入されている。シフター支持部材4の試料室1側には、球面軸受部6が設けられている。球面軸受部6は、その内面が球面状に形成されている。
【0024】
シフター10は、管状の部材であり、試料室1に連通する孔12を有している。図示の例では、孔12は、X軸方向に貫通している。孔12の形状は、例えば、円柱状であり、孔12の中心軸(図示しない)は、X軸と平行である。孔12には、試料ホルダー20が装着される。これにより、試料ホルダー20は、Y軸方向およびZ軸方向の移動が規制され、X軸方向に直線的に移動可能となる。シフター10の内側には、試料ホルダー20を支持するベアリング14が設けられている。図示の例では、ベアリング14は、シフター10の両端部(孔12の開口付近)に設けられている。ベアリング14は、試料ホルダー20のX軸方向への移動を円滑にすることができる。なお、ベアリング14の位置および数は、図1の例に限定されず、試料ホルダー20を直線的に移動可能に支持できる位置および数であればよい。
【0025】
シフター10は、試料室1側の端部に、球面部16を有する。球面部16の表面は、中心が孔12の中心軸上にある球面状に形成されている。球面部16は、球面軸受部6により支持される。球面軸受部6は、その内面が球面部16の表面に接するように形成されている。これにより、球面部16は、球面軸受部6に摺動可能に支持される。そのため、シフター10は、球面部16の中心を回動中心として、回動することができる。球面部16と球面軸受部6との間には、試料室1を気密に封止するためのOリング19が設けられている。
【0026】
試料ホルダー20は、シフター10の孔12に移動可能に装着される。試料ホルダー20は、第1部分22と、第2部分24と、第3部分26と、を有する。試料ホルダー20は、さらに、図2に示すように、第1部分22と第2部分24とを接続する弾性部材50と、第1部分22の移動を制限するストッパー52と、を有する。
【0027】
第1部分22の先端部は、図1に示すように、試料室1に配置される。第1部分22は、試料Sを保持可能な試料保持部23を有する。試料保持部23は、第1部分22の先端部に設けられる。試料保持部23は、図示はしないが、例えば、試料Sをねじの締め付けにより固定してもよいし、試料Sをリング状のばねを用いて押さえることにより固定してもよい。第1部分22は、図2に示すように、リニアガイド40を介して、第2部分24に支持されている。図示の例では、第1部分22は、さらに、ベアリング14(試料室1側)によって支持されている。第1部分22は、第1部分22と第2部分24との接続部分を覆うカバー部21を有している。
【0028】
第2部分24は、図1に示すように、シフター10の孔12に配置される。第2部分24には、Oリング30が装着されている。具体的には、第2部分24の外周面には、溝25が周設されており、この溝25内にOリング30が装着されている。第2部分24の先端には、図2に示すように、X軸方向に穴が設けられており、第1部分22は、この穴に挿入され、リニアガイド40を介して、第2部分24によって支持される。
【0029】
第3部分26は、図1に示すように、第2部分24に接続されている。第3部分26の幅W(Y軸方向の長さ)は、シフター10の孔12の径よりも大きい。そのため、第3部分26は、シフター10の孔12に挿入されず、試料室1の圧力と大気圧との圧力差により生じる力によって、シフター10に押しつけられる。すなわち、第3部分26は、試料室1の圧力と大気圧との圧力差により生じる力によって、シフター10に固定されている。図示の例では、第3部分26の接触面27が、シフター10の端面11に押しつけられている。
【0030】
Oリング30は、シフター10の内面と接して、シフター10と試料ホルダー20との間を気密に封止している。Oリング30は、第2部分24の移動に伴って、シフター10の孔12内を摺動する。Oリング30の材質は、例えば、ゴムなどの粘弾性材料である。
【0031】
リニアガイド40は、図2および図3に示すように、第1部分22に形成された第1ガイド溝42aと、第2部分24に形成された第2ガイド溝42bと、ボール44と、を含んで構成されている。ガイド溝42a,42bは、X軸方向に沿って形成されている。図示の例では、第1ガイド溝42aは、第1部分22に2本設けられ、第2ガイド溝42bは、第2部分24に2本設けられている。なお、ガイド溝42a,42bの本数は特に限定されない。ボール44は、第1ガイド溝42aと第2ガイド溝42bとに、転動可能に挟持されている。これにより、第1部分22は、Y軸方向およびZ軸方向の移動が規制され、X軸方向に直線的に移動可能となる。さらに、第1部分22は、X軸方向に対して、第2部分24から独立して移動可能である。ボール44は、例えば、球状である。ボール44の材質は、例えば、金属、セラミックス、プラスチック等である。また、ボール44は、図示の例では、1本のガイド溝42a,42bに対して5個挟持されているが、その数は限定されない。
【0032】
弾性部材50は、図2に示すように、第1部分22と第2部分24とを接続している。弾性部材50は、カバー部21の内側の空隙に収容されている。弾性部材50の一方の端部は、カバー部21に接続されており、他方の端部は、第2部分24に接続されている。弾性部材50は、第1部分22に−X軸方向(第2部分24から遠ざかる方向)の力を作用させている。そのため、第1部分22は、図1に示すように、X駆動機構60のレバー62に押しつけられている。弾性部材50の発生力(弾性部材50によって第1部分22に働く力)は、試料室1の圧力と大気圧との圧力差によって試料ホルダー20にかかる荷重よりも小さくなるように設定される。弾性部材50は、例えば、圧縮ばねである。
【0033】
ストッパー52は、図2に示すように、第1部分22に設けられた孔53と、第2部分24に設けられ、孔53に挿入された突起部54と、を含んで構成されている。図示の例では、孔53は、カバー部21に設けられている。孔53は、カバー部21の−X軸方向側の側面55aからカバー部21の+X軸方向側の側面55bまでX軸方向に沿って延びる長孔である。突起部54は、孔53に挿入されている。突起部54は、図示の例では、第2部分24に固定されたねじである。突起部54は、第1部分22が+X軸方向に所定距離だけ移動すると側面55aに当接し、第1部分22が−X軸方向に所定距離だけ移動すると側面55bに当接するように設けられている。そのため、第1部分22のX軸方向の移動範囲が規制される。
【0034】
駆動機構60,70は、試料室1における試料ホルダー20の位置を変えることができる。具体的には、駆動機構60,70は、試料Sを試料室1の所望の位置へ移動および静止させるように、試料ホルダー20を動作させる。
【0035】
X駆動機構60は、試料ホルダー20の第1部分22をX軸方向に沿って移動させる。X駆動機構60は、図1に示すように、レバー62と、Xモーター64と、平歯車対66と、X送りねじ68と、を含んで構成されている。
【0036】
レバー62は、軸63を回転中心とするてこ式のレバーである。レバー62の試料室1側の端部には、ベアリング61が設けられ、ベアリング61を介して第1部分22を支持している。ベアリング61は、YZ平面内を転動することができる。そのため、後述する試料S(第1部分22)のY軸方向への移動が円滑になる。第1部分22には、弾性部材50によって−X軸方向の力が働いているため、第1部分22は、レバー62(ベアリング61)に押しつけられている。レバー62の試料室1側とは反対側の端部には、X送りねじ68が接している。
【0037】
X送りねじ68は、Xモーター64の回転によって、X軸方向に直線的に移動する。このX送りねじ68の移動により、レバー62は、軸63を回転中心として回転し、第1部分22をX軸方向に直線的に移動させる。これにより、試料SをX軸方向に直線的に移動させることができる。平歯車対66は、Xモーター64の回転をX送りねじ68に伝達することができる。ベローズ69は、試料室1を減圧状態に保ちつつ、レバー62の移動を円滑にすることができる。
【0038】
Y駆動機構70は、Yモーター74と、平歯車対76と、Y送りねじ78と、戻しばね79と、を含んで構成されている。Y送りねじ78の先端は、図1に示すように、シフター10の+Y軸方向側の外周面に接している。シフター10の−Y軸方向側の外周面には、戻しばね79が設けられている。シフター10は、戻しばね79によって、+Y軸方向に付勢されている。Y送りねじ78は、Yモーター74の回転によって、Y軸方向に直線的に移動する。このY送りねじ78の移動により、シフター10は、球面部16の中心を回動中心として回動する。これにより、試料SをY軸方向に直線的に移動させることができる。平歯車対76は、Yモーター74の回転をY送りねじ78に伝達することができる。
【0039】
なお、試料位置決め装置100は、試料SをZ軸方向に移動させるZ駆動機構(図示せず)をさらに有していてもよい。Z駆動機構は、Y駆動機構70と同様の構成であってもよい。また、試料位置決め装置100は、試料SをX軸まわりに傾斜させる機構(図示しない)を有していてもよい。
【0040】
2. 試料位置決め装置の動作
次に、試料位置決め装置の動作について説明する。
【0041】
試料位置決め装置100では、図1に示すX駆動機構60によって試料ホルダー20の第1部分22をX軸方向に移動させることにより、試料SをX軸方向に移動させる。具体的には、Xモーター64の回転によって、X送りねじ68をX軸方向に移動させ、レバー62を回転させる。これにより、第1部分22がX軸方向に直線的に移動し、試料SがX軸方向に移動する。このとき、第1部分22が移動しても、第2部分24は移動しない。これは、第2部分24が、リニアガイド40を介して、第1部分22を独立して移動可能に支持しているためである。
【0042】
試料位置決め装置100では、Y駆動機構70によってシフター10を移動させることにより、試料ホルダー20を移動させて、試料SをY軸方向に移動させる。具体的には、Yモーター74の回転によって、Y送りねじ78をY軸方向に直線的に移動させ、シフター10を球面部16の中心を回動中心として、回動させる。このシフター10の回動に伴って試料ホルダー20も回動し、試料SがY軸方向に移動する。
【0043】
なお、試料SのZ軸方向への移動については、上述したY駆動機構70と同様であるため、その説明を省略する。
【0044】
本実施形態に係る試料位置決め装置100は、例えば、以下の特徴を有する。
【0045】
試料位置決め装置100では、試料ホルダー20の第2部分24が、リニアガイド40を介して、第1部分22を移動可能に支持している。これにより、X駆動機構60によって第1部分22を移動させる際に、第2部分24を移動させないことができる。すなわち、X駆動機構60によって第1部分22を移動させる際に、Oリング30を移動させないことができる。したがって、Oリング30に応力が発生することを抑制することができ、試料Sのドリフトを抑制することができる。以下、その理由について詳細に説明する。
【0046】
例えば、第1部分と第2部分とが独立して移動可能となっておらず、一体的に形成された試料ホルダーの場合、X駆動機構によって試料をX軸方向(試料ホルダーの軸方向)に移動させると、試料がX軸方向に移動し続ける現象が発生する。ここでは、この現象をアフタードリフトという。このアフタードリフトの速度が、試料の観察・分析のために十分な程度に遅くなるまでの時間は、数十分以上を要することがあり、観察・分析のスループットが抑制される問題がある。
【0047】
図4は、アフタードリフトを説明するための図である。なお、図4では、便宜上、Xモーター64aは、回転するものではなく、直動するものとして図示した。Xモーター64aがA方向(例えば、+X軸方向)に駆動したとき、試料ホルダー20aは、シフター10aに設けられたベアリング14aによって支持されながらA方向に直線的に移動させられる。このとき、試料ホルダー20aには、A方向とは反対方向のB方向(例えば、−X軸方向)に、大気圧(試料室1の圧力と大気圧との圧力差により生じる力)P、および試料ホルダー20aに装着されたOリング(図1および図2のOリング30に相当)の摩擦抵抗力Fが働く。なお、ベアリング14aの転がり抵抗は小さいため考慮しない。モーター64aと試料ホルダー20aとの間には、レバーやベアリング等のX送り機構の剛性(ばね性)62aが存在する。したがって、試料ホルダー20aの位置は、Xモーター64aの駆動量だけではなく、大気圧Pと、Oリングの摩擦抵抗力Fと、X送り機構の剛性62aとのバランスによって決定される。Oリングの摩擦抵抗力Fがない場合には、大気圧PとX送り機構の剛性62aのたわみによる力がつり合うため、Xモーター64aの移動量と試料ホルダー20aの移動量は一致する。しかし、Oリングの摩擦抵抗力Fがあるために、試料ホルダー20aの移動量は、Xモーター64aの駆動量よりも小さくなる。
【0048】
ところで、Oリングの素材であるゴムなどの粘弾性材料には、応力緩和が生じることが知られている。試料ホルダー20aの移動によってOリングは変形させられ、Oリングには応力が発生する。当該応力は、応力緩和によって時間経過とともに漸減する。したがって、Oリングの摩擦抵抗力FによってX送り機構62aの剛性に発生したたわみは、時間経過とともに少なくなる。つまり、試料ホルダー20aは、Xモーター64aによって移動させられた方向(A方向)に移動しつづける。これが、試料移動後のアフタードリフトとして観察される。
【0049】
試料位置決め装置100によれば、上述したように、X駆動機構60によって第1部分22を移動させる際に、Oリング30が装着された第2部分24を移動させないことができるため、Oリング30に応力(摩擦抵抗力)が発生することを抑制することができる。したがって、試料位置決め装置100では、アフタードリフトの発生を抑制することができる。
【0050】
試料位置決め装置100では、弾性部材50が、試料ホルダー20の第1部分22と第2部分24との間を接続している。これにより、第1部分22を、レバー62(ベアリング61)に押しつけることができる。したがって、第1部分22を安定して移動させることができる。
【0051】
試料位置決め装置100は、試料ホルダー20の第1部分22の移動を制限するストッパー52を有する。これにより、例えば、試料ホルダー20をシフター10の孔12から取り外すときに、第1部分22が第2部分24から脱落することを防ぐことができる。
【0052】
試料位置決め装置100では、試料ホルダー20の第3部分26が、シフター10の孔12の径よりも大きい幅を有している。これにより、第3部分26を、試料室1の圧力と大気圧との圧力差により生じる力によって、シフター10に固定することができる。そのため、この圧力差によって試料ホルダー20にかかる力を、シフター10で支えることができる。したがって、大気圧の変動による試料ホルダー20の移動を抑制でき、試料Sのドリフトを抑制することができる。
【0053】
例えば、従来、試料位置決め装置では、試料室の圧力と大気圧との圧力差によって試料ホルダーにかかる力は、ベアリングやレバー(図1のベアリング61、レバー62に相当)等のX駆動機構によって支えられてきた。しかしながら、このような試料位置決め装置では、電子顕微鏡が設置された部屋の扉の開閉などによって生じる大気圧の変動により、図4で説明した力のバランスが崩れ、試料ホルダーの位置がA方向やB方向に変動し、試料がドリフトする場合があった。
【0054】
試料位置決め装置100によれば、上述のように、試料室1の圧力と大気圧との圧力差によって試料ホルダー20にかかる力を、シフター10で支えることができる。そのため、試料ホルダーにかかる力をX駆動機構によって支える場合と比べて、大気圧の変動による試料ホルダーの移動を抑制することができる。したがって、試料位置決め装置100によれば、大気圧の変動による試料Sのドリフトを抑制することができる。なお、シフター10にも大気圧がかかっているが、試料SのX軸方向の位置を規制しているのは、レバー62(ベアリング61)である。したがって、シフター10が移動しても、試料Sの位置はほとんど変動しないため、シフター10にかかる大気圧の影響はわずかである。
【0055】
なお、ここでは、試料位置決め装置100を、透過電子顕微鏡に適用した場合について説明したが、試料位置決め装置100は、透過電子顕微鏡に限らず、その他の荷電粒子線装置に適用することができる。荷電粒子線装置としては、例えば、電子顕微鏡、集束イオンビーム装置、電子ビーム露光装置等が挙げられる。
【0056】
本発明は、実施の形態で説明した構成と実質的に同一の構成(例えば、機能、方法および結果が同一の構成、あるいは目的及び効果が同一の構成)を含む。また、本発明は、実施の形態で説明した構成の本質的でない部分を置き換えた構成を含む。また、本発明は、実施の形態で説明した構成と同一の作用効果を奏する構成又は同一の目的を達成することができる構成を含む。また、本発明は、実施の形態で説明した構成に公知技術を付加した構成を含む。
【符号の説明】
【0057】
1 試料室、2 壁部、4 シフター支持部材、6 球面軸受部、
10 管状部材(シフター)、11 端面、12 孔、14 ベアリング、
16 球面部、19 Oリング、20 試料ホルダー、21 カバー部、
22 第1部分、23 試料保持部、24 第2部分、25 溝、26 第3部分、
27 接触面、30 Oリング、40 リニアガイド、42a,42b ガイド溝、
44 ボール、50 弾性部材、52 ストッパー、53 孔、54 突起部、
55a 第1側面、55b 第2側面、60 X駆動機構、61 ベアリング、
62 レバー、63 軸、64 Xモーター、66 平歯車対、68 X送りねじ、
69 ベローズ、70 Y駆動機構、74 Yモーター、76 平歯車対、
78 Y送りねじ、79 戻しばね、100 試料位置決め装置
【技術分野】
【0001】
本発明は、荷電粒子線装置の試料位置決め装置に関する。
【背景技術】
【0002】
電子顕微鏡で試料を原子レベルの高い観察倍率で観察する際や試料を高い精度で分析する際には、試料のドリフトが問題となる場合がある。
【0003】
試料のドリフトの原因としては、例えば、試料ホルダーやゴニオメーターなどの熱的、機械的不安定性に起因するもの、電子レンズの熱的不安定性に起因するもの、試料の変形や試料のチャージアップに起因するものなどが挙げられる。
【0004】
ここで、電子顕微鏡では、試料位置決め装置によって試料の支持および移動を行う。試料位置決め装置において、試料の支持は、一般的に、先端に試料保持部を有する試料ホルダーによって行われる。この試料ホルダーには、試料室を気密に封止するためのOリングが装着されるが、このOリングの弾性変形が、試料をドリフトさせる原因の一つとなる場合がある。具体的には、Oリングは、ゴム等の粘弾性材料からなるため、試料ホルダーの移動に伴って摺動することにより弾性変形する。弾性変形によりOリングには、応力が生じる。Oリングに生じた応力は、徐々に緩和されるため、結果として、試料ホルダーも徐々に移動し、試料がドリフトする。
【0005】
上記のようなOリングによるドリフトの影響を低減するために、例えば、特許文献1には、試料ホルダーに装着されたOリングと試料微動装置とが機械的に接触しないような構成とした電子顕微鏡が開示されている。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開昭62−98545号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
本発明のいくつかの態様に係る目的の1つは、試料のドリフトを抑制できる荷電粒子線装置の試料位置決め装置を提供することにある。
【課題を解決するための手段】
【0008】
(1)本発明に係る荷電粒子線装置の試料位置決め装置は、
減圧状態に維持可能な試料室と、
前記試料室に連通する孔を有する管状部材と、
前記孔に移動可能に装着される試料ホルダーと、
前記試料ホルダーに装着され、前記管状部材の内面に接するOリングと、
前記試料室における前記試料ホルダーの位置を変える駆動機構と、
を含み、
前記試料ホルダーは、
先端部が前記試料室に配置される第1部分と、
前記孔に配置される第2部分と、
を有し、
前記第1部分は、前記先端部に、試料を保持可能な試料保持部を有し、
前記第2部分は、リニアガイドを介して、前記第1部分を移動可能に支持し、
前記Oリングは、前記第2部分に装着され、
前記駆動機構は、前記第1部分を移動させる。
【0009】
このような荷電粒子線装置の試料位置決め装置によれば、駆動機構によって第1部分を移動させる際に、Oリングが装着された第2部分を移動させないことができる。すなわち、駆動機構によって第1部分を移動させる際に、Oリングを移動させないことができる。したがって、Oリングに応力が発生することを抑制することができ、試料のドリフトを抑制することができる。
【0010】
(2)本発明に係る荷電粒子線装置の試料位置決め装置において、
前記試料ホルダーは、前記第1部分と前記第2部分とを接続する弾性部材を有してもよい。
【0011】
このような荷電粒子線装置の試料位置決め装置によれば、弾性部材によって、第1部分を駆動機構に押しつけることができる。これにより、第1部分を安定して移動させることができる。
【0012】
(3)本発明に係る荷電粒子線装置の試料位置決め装置において、
前記試料ホルダーは、前記第1部分の移動を制限するストッパーを有してもよい。
【0013】
このような荷電粒子線装置の試料位置決め装置によれば、第1部分が第2部分から脱落することを防ぐことができる。
【0014】
(4)本発明に係る荷電粒子線装置の試料位置決め装置において、
前記試料ホルダーは、前記第2部分に接続された第3部分を、さらに有し、
前記第3部分は、前記孔の径よりも大きい幅を有してもよい。
【0015】
このような荷電粒子線装置の試料位置決め装置によれば、第3部分を、試料室の圧力と大気圧との圧力差により生じる力によって、管状部材に固定することができる。そのため、試料室の圧力と大気圧との圧力差によって試料ホルダーにかかる力を、管状部材で支えることができる。したがって、大気圧の変動による試料ホルダーの移動を抑制でき、試料のドリフトを抑制することができる。
【図面の簡単な説明】
【0016】
【図1】本実施形態に係る電子顕微鏡の試料位置決め装置を模式的に示す断面図。
【図2】本実施形態に係る電子顕微鏡の試料位置決め装置を模式的に示す断面図。
【図3】本実施形態に係る電子顕微鏡の試料位置決め装置を模式的に示す断面図。
【図4】アフタードリフトを説明するための図。
【発明を実施するための形態】
【0017】
以下、本発明の好適な実施形態について図面を用いて詳細に説明する。なお、以下に説明する実施形態は、特許請求の範囲に記載された本発明の内容を不当に限定するものではない。また、以下で説明される構成の全てが本発明の必須構成要件であるとは限らない。
【0018】
1. 試料位置決め装置の構成
まず、本実施形態に係る荷電粒子線装置の試料位置決め装置の構成について図面を参照しながら説明する。図1〜図3は、本実施形態に係る荷電粒子線装置の試料位置決め装置100を模式的に示す断面図である。図2は、図1のII−II線断面図であり、図3は、図2のIII−III線断面図である。また、図1〜図3は、試料位置決め装置100の使用状態、すなわち、試料ホルダー20をシフター10に装着した状態を示している。以下、試料位置決め装置100の使用状態について説明する。なお、本実施形態では、試料位置決め装置100は、透過型電子顕微鏡の試料位置決め装置である。
【0019】
試料位置決め装置100は、図1に示すように、試料室1と、管状部材(以下「シフター」ともいう)10と、試料ホルダー20と、Oリング30と、X駆動機構60と、Y駆動機構70と、を含む。試料位置決め装置100は、さらに、シフター支持部材4を含むことができる。
【0020】
試料位置決め装置100では、試料室1は、図1に示すように、壁部2によって囲まれている。シフター10は、壁部2を貫通するように設けられたシフター支持部材4によって支持されている。シフター10は、試料室1に連通する孔12を有しており、試料ホルダー20は、この孔12に移動可能に装着されている。試料ホルダー20にはOリング30が装着され、試料ホルダー20とシフター10との間が気密に封しされている。試料ホルダー20は、先端部が試料室1に配置されている第1部分22を有しており、X駆動機構60は、この第1部分22を移動させることにより、試料SをX軸方向に沿って移動させる。Y駆動機構70は、シフター10を回動させることにより試料SをY軸方向に沿って移動させる。
【0021】
試料位置決め装置100は、試料Sを試料室1の所望の位置へ移動および静止させることができる。具体的には、試料位置決め装置100は、試料ホルダー20によって試料Sを支持し、駆動機構60,70によってX,Y軸方向に対して、試料Sを直線的に移動させることができる。また、試料位置決め装置100は、Z駆動機構(図示しない)によって、Z軸方向に対して、試料Sを直線的に移動させてもよいし、傾斜機構(図示しない)によって、試料SをX軸周りに傾斜させてもよい。なお、図示の例において、Z軸方向は、試料室1を通過する電子線(図示しない)の進行方向である。
【0022】
試料室1は、減圧状態に維持可能である。試料室1は、公知のポンプ(図示しない)によって真空排気されることにより減圧状態に維持される。試料室1には、試料ホルダー20によって試料Sが導入される。そして、試料室1において、試料Sに電子線が照射される。
【0023】
シフター支持部材4は、壁部2を貫通する円筒状の部材である。シフター支持部材4には、シフター10が挿入されている。シフター支持部材4の試料室1側には、球面軸受部6が設けられている。球面軸受部6は、その内面が球面状に形成されている。
【0024】
シフター10は、管状の部材であり、試料室1に連通する孔12を有している。図示の例では、孔12は、X軸方向に貫通している。孔12の形状は、例えば、円柱状であり、孔12の中心軸(図示しない)は、X軸と平行である。孔12には、試料ホルダー20が装着される。これにより、試料ホルダー20は、Y軸方向およびZ軸方向の移動が規制され、X軸方向に直線的に移動可能となる。シフター10の内側には、試料ホルダー20を支持するベアリング14が設けられている。図示の例では、ベアリング14は、シフター10の両端部(孔12の開口付近)に設けられている。ベアリング14は、試料ホルダー20のX軸方向への移動を円滑にすることができる。なお、ベアリング14の位置および数は、図1の例に限定されず、試料ホルダー20を直線的に移動可能に支持できる位置および数であればよい。
【0025】
シフター10は、試料室1側の端部に、球面部16を有する。球面部16の表面は、中心が孔12の中心軸上にある球面状に形成されている。球面部16は、球面軸受部6により支持される。球面軸受部6は、その内面が球面部16の表面に接するように形成されている。これにより、球面部16は、球面軸受部6に摺動可能に支持される。そのため、シフター10は、球面部16の中心を回動中心として、回動することができる。球面部16と球面軸受部6との間には、試料室1を気密に封止するためのOリング19が設けられている。
【0026】
試料ホルダー20は、シフター10の孔12に移動可能に装着される。試料ホルダー20は、第1部分22と、第2部分24と、第3部分26と、を有する。試料ホルダー20は、さらに、図2に示すように、第1部分22と第2部分24とを接続する弾性部材50と、第1部分22の移動を制限するストッパー52と、を有する。
【0027】
第1部分22の先端部は、図1に示すように、試料室1に配置される。第1部分22は、試料Sを保持可能な試料保持部23を有する。試料保持部23は、第1部分22の先端部に設けられる。試料保持部23は、図示はしないが、例えば、試料Sをねじの締め付けにより固定してもよいし、試料Sをリング状のばねを用いて押さえることにより固定してもよい。第1部分22は、図2に示すように、リニアガイド40を介して、第2部分24に支持されている。図示の例では、第1部分22は、さらに、ベアリング14(試料室1側)によって支持されている。第1部分22は、第1部分22と第2部分24との接続部分を覆うカバー部21を有している。
【0028】
第2部分24は、図1に示すように、シフター10の孔12に配置される。第2部分24には、Oリング30が装着されている。具体的には、第2部分24の外周面には、溝25が周設されており、この溝25内にOリング30が装着されている。第2部分24の先端には、図2に示すように、X軸方向に穴が設けられており、第1部分22は、この穴に挿入され、リニアガイド40を介して、第2部分24によって支持される。
【0029】
第3部分26は、図1に示すように、第2部分24に接続されている。第3部分26の幅W(Y軸方向の長さ)は、シフター10の孔12の径よりも大きい。そのため、第3部分26は、シフター10の孔12に挿入されず、試料室1の圧力と大気圧との圧力差により生じる力によって、シフター10に押しつけられる。すなわち、第3部分26は、試料室1の圧力と大気圧との圧力差により生じる力によって、シフター10に固定されている。図示の例では、第3部分26の接触面27が、シフター10の端面11に押しつけられている。
【0030】
Oリング30は、シフター10の内面と接して、シフター10と試料ホルダー20との間を気密に封止している。Oリング30は、第2部分24の移動に伴って、シフター10の孔12内を摺動する。Oリング30の材質は、例えば、ゴムなどの粘弾性材料である。
【0031】
リニアガイド40は、図2および図3に示すように、第1部分22に形成された第1ガイド溝42aと、第2部分24に形成された第2ガイド溝42bと、ボール44と、を含んで構成されている。ガイド溝42a,42bは、X軸方向に沿って形成されている。図示の例では、第1ガイド溝42aは、第1部分22に2本設けられ、第2ガイド溝42bは、第2部分24に2本設けられている。なお、ガイド溝42a,42bの本数は特に限定されない。ボール44は、第1ガイド溝42aと第2ガイド溝42bとに、転動可能に挟持されている。これにより、第1部分22は、Y軸方向およびZ軸方向の移動が規制され、X軸方向に直線的に移動可能となる。さらに、第1部分22は、X軸方向に対して、第2部分24から独立して移動可能である。ボール44は、例えば、球状である。ボール44の材質は、例えば、金属、セラミックス、プラスチック等である。また、ボール44は、図示の例では、1本のガイド溝42a,42bに対して5個挟持されているが、その数は限定されない。
【0032】
弾性部材50は、図2に示すように、第1部分22と第2部分24とを接続している。弾性部材50は、カバー部21の内側の空隙に収容されている。弾性部材50の一方の端部は、カバー部21に接続されており、他方の端部は、第2部分24に接続されている。弾性部材50は、第1部分22に−X軸方向(第2部分24から遠ざかる方向)の力を作用させている。そのため、第1部分22は、図1に示すように、X駆動機構60のレバー62に押しつけられている。弾性部材50の発生力(弾性部材50によって第1部分22に働く力)は、試料室1の圧力と大気圧との圧力差によって試料ホルダー20にかかる荷重よりも小さくなるように設定される。弾性部材50は、例えば、圧縮ばねである。
【0033】
ストッパー52は、図2に示すように、第1部分22に設けられた孔53と、第2部分24に設けられ、孔53に挿入された突起部54と、を含んで構成されている。図示の例では、孔53は、カバー部21に設けられている。孔53は、カバー部21の−X軸方向側の側面55aからカバー部21の+X軸方向側の側面55bまでX軸方向に沿って延びる長孔である。突起部54は、孔53に挿入されている。突起部54は、図示の例では、第2部分24に固定されたねじである。突起部54は、第1部分22が+X軸方向に所定距離だけ移動すると側面55aに当接し、第1部分22が−X軸方向に所定距離だけ移動すると側面55bに当接するように設けられている。そのため、第1部分22のX軸方向の移動範囲が規制される。
【0034】
駆動機構60,70は、試料室1における試料ホルダー20の位置を変えることができる。具体的には、駆動機構60,70は、試料Sを試料室1の所望の位置へ移動および静止させるように、試料ホルダー20を動作させる。
【0035】
X駆動機構60は、試料ホルダー20の第1部分22をX軸方向に沿って移動させる。X駆動機構60は、図1に示すように、レバー62と、Xモーター64と、平歯車対66と、X送りねじ68と、を含んで構成されている。
【0036】
レバー62は、軸63を回転中心とするてこ式のレバーである。レバー62の試料室1側の端部には、ベアリング61が設けられ、ベアリング61を介して第1部分22を支持している。ベアリング61は、YZ平面内を転動することができる。そのため、後述する試料S(第1部分22)のY軸方向への移動が円滑になる。第1部分22には、弾性部材50によって−X軸方向の力が働いているため、第1部分22は、レバー62(ベアリング61)に押しつけられている。レバー62の試料室1側とは反対側の端部には、X送りねじ68が接している。
【0037】
X送りねじ68は、Xモーター64の回転によって、X軸方向に直線的に移動する。このX送りねじ68の移動により、レバー62は、軸63を回転中心として回転し、第1部分22をX軸方向に直線的に移動させる。これにより、試料SをX軸方向に直線的に移動させることができる。平歯車対66は、Xモーター64の回転をX送りねじ68に伝達することができる。ベローズ69は、試料室1を減圧状態に保ちつつ、レバー62の移動を円滑にすることができる。
【0038】
Y駆動機構70は、Yモーター74と、平歯車対76と、Y送りねじ78と、戻しばね79と、を含んで構成されている。Y送りねじ78の先端は、図1に示すように、シフター10の+Y軸方向側の外周面に接している。シフター10の−Y軸方向側の外周面には、戻しばね79が設けられている。シフター10は、戻しばね79によって、+Y軸方向に付勢されている。Y送りねじ78は、Yモーター74の回転によって、Y軸方向に直線的に移動する。このY送りねじ78の移動により、シフター10は、球面部16の中心を回動中心として回動する。これにより、試料SをY軸方向に直線的に移動させることができる。平歯車対76は、Yモーター74の回転をY送りねじ78に伝達することができる。
【0039】
なお、試料位置決め装置100は、試料SをZ軸方向に移動させるZ駆動機構(図示せず)をさらに有していてもよい。Z駆動機構は、Y駆動機構70と同様の構成であってもよい。また、試料位置決め装置100は、試料SをX軸まわりに傾斜させる機構(図示しない)を有していてもよい。
【0040】
2. 試料位置決め装置の動作
次に、試料位置決め装置の動作について説明する。
【0041】
試料位置決め装置100では、図1に示すX駆動機構60によって試料ホルダー20の第1部分22をX軸方向に移動させることにより、試料SをX軸方向に移動させる。具体的には、Xモーター64の回転によって、X送りねじ68をX軸方向に移動させ、レバー62を回転させる。これにより、第1部分22がX軸方向に直線的に移動し、試料SがX軸方向に移動する。このとき、第1部分22が移動しても、第2部分24は移動しない。これは、第2部分24が、リニアガイド40を介して、第1部分22を独立して移動可能に支持しているためである。
【0042】
試料位置決め装置100では、Y駆動機構70によってシフター10を移動させることにより、試料ホルダー20を移動させて、試料SをY軸方向に移動させる。具体的には、Yモーター74の回転によって、Y送りねじ78をY軸方向に直線的に移動させ、シフター10を球面部16の中心を回動中心として、回動させる。このシフター10の回動に伴って試料ホルダー20も回動し、試料SがY軸方向に移動する。
【0043】
なお、試料SのZ軸方向への移動については、上述したY駆動機構70と同様であるため、その説明を省略する。
【0044】
本実施形態に係る試料位置決め装置100は、例えば、以下の特徴を有する。
【0045】
試料位置決め装置100では、試料ホルダー20の第2部分24が、リニアガイド40を介して、第1部分22を移動可能に支持している。これにより、X駆動機構60によって第1部分22を移動させる際に、第2部分24を移動させないことができる。すなわち、X駆動機構60によって第1部分22を移動させる際に、Oリング30を移動させないことができる。したがって、Oリング30に応力が発生することを抑制することができ、試料Sのドリフトを抑制することができる。以下、その理由について詳細に説明する。
【0046】
例えば、第1部分と第2部分とが独立して移動可能となっておらず、一体的に形成された試料ホルダーの場合、X駆動機構によって試料をX軸方向(試料ホルダーの軸方向)に移動させると、試料がX軸方向に移動し続ける現象が発生する。ここでは、この現象をアフタードリフトという。このアフタードリフトの速度が、試料の観察・分析のために十分な程度に遅くなるまでの時間は、数十分以上を要することがあり、観察・分析のスループットが抑制される問題がある。
【0047】
図4は、アフタードリフトを説明するための図である。なお、図4では、便宜上、Xモーター64aは、回転するものではなく、直動するものとして図示した。Xモーター64aがA方向(例えば、+X軸方向)に駆動したとき、試料ホルダー20aは、シフター10aに設けられたベアリング14aによって支持されながらA方向に直線的に移動させられる。このとき、試料ホルダー20aには、A方向とは反対方向のB方向(例えば、−X軸方向)に、大気圧(試料室1の圧力と大気圧との圧力差により生じる力)P、および試料ホルダー20aに装着されたOリング(図1および図2のOリング30に相当)の摩擦抵抗力Fが働く。なお、ベアリング14aの転がり抵抗は小さいため考慮しない。モーター64aと試料ホルダー20aとの間には、レバーやベアリング等のX送り機構の剛性(ばね性)62aが存在する。したがって、試料ホルダー20aの位置は、Xモーター64aの駆動量だけではなく、大気圧Pと、Oリングの摩擦抵抗力Fと、X送り機構の剛性62aとのバランスによって決定される。Oリングの摩擦抵抗力Fがない場合には、大気圧PとX送り機構の剛性62aのたわみによる力がつり合うため、Xモーター64aの移動量と試料ホルダー20aの移動量は一致する。しかし、Oリングの摩擦抵抗力Fがあるために、試料ホルダー20aの移動量は、Xモーター64aの駆動量よりも小さくなる。
【0048】
ところで、Oリングの素材であるゴムなどの粘弾性材料には、応力緩和が生じることが知られている。試料ホルダー20aの移動によってOリングは変形させられ、Oリングには応力が発生する。当該応力は、応力緩和によって時間経過とともに漸減する。したがって、Oリングの摩擦抵抗力FによってX送り機構62aの剛性に発生したたわみは、時間経過とともに少なくなる。つまり、試料ホルダー20aは、Xモーター64aによって移動させられた方向(A方向)に移動しつづける。これが、試料移動後のアフタードリフトとして観察される。
【0049】
試料位置決め装置100によれば、上述したように、X駆動機構60によって第1部分22を移動させる際に、Oリング30が装着された第2部分24を移動させないことができるため、Oリング30に応力(摩擦抵抗力)が発生することを抑制することができる。したがって、試料位置決め装置100では、アフタードリフトの発生を抑制することができる。
【0050】
試料位置決め装置100では、弾性部材50が、試料ホルダー20の第1部分22と第2部分24との間を接続している。これにより、第1部分22を、レバー62(ベアリング61)に押しつけることができる。したがって、第1部分22を安定して移動させることができる。
【0051】
試料位置決め装置100は、試料ホルダー20の第1部分22の移動を制限するストッパー52を有する。これにより、例えば、試料ホルダー20をシフター10の孔12から取り外すときに、第1部分22が第2部分24から脱落することを防ぐことができる。
【0052】
試料位置決め装置100では、試料ホルダー20の第3部分26が、シフター10の孔12の径よりも大きい幅を有している。これにより、第3部分26を、試料室1の圧力と大気圧との圧力差により生じる力によって、シフター10に固定することができる。そのため、この圧力差によって試料ホルダー20にかかる力を、シフター10で支えることができる。したがって、大気圧の変動による試料ホルダー20の移動を抑制でき、試料Sのドリフトを抑制することができる。
【0053】
例えば、従来、試料位置決め装置では、試料室の圧力と大気圧との圧力差によって試料ホルダーにかかる力は、ベアリングやレバー(図1のベアリング61、レバー62に相当)等のX駆動機構によって支えられてきた。しかしながら、このような試料位置決め装置では、電子顕微鏡が設置された部屋の扉の開閉などによって生じる大気圧の変動により、図4で説明した力のバランスが崩れ、試料ホルダーの位置がA方向やB方向に変動し、試料がドリフトする場合があった。
【0054】
試料位置決め装置100によれば、上述のように、試料室1の圧力と大気圧との圧力差によって試料ホルダー20にかかる力を、シフター10で支えることができる。そのため、試料ホルダーにかかる力をX駆動機構によって支える場合と比べて、大気圧の変動による試料ホルダーの移動を抑制することができる。したがって、試料位置決め装置100によれば、大気圧の変動による試料Sのドリフトを抑制することができる。なお、シフター10にも大気圧がかかっているが、試料SのX軸方向の位置を規制しているのは、レバー62(ベアリング61)である。したがって、シフター10が移動しても、試料Sの位置はほとんど変動しないため、シフター10にかかる大気圧の影響はわずかである。
【0055】
なお、ここでは、試料位置決め装置100を、透過電子顕微鏡に適用した場合について説明したが、試料位置決め装置100は、透過電子顕微鏡に限らず、その他の荷電粒子線装置に適用することができる。荷電粒子線装置としては、例えば、電子顕微鏡、集束イオンビーム装置、電子ビーム露光装置等が挙げられる。
【0056】
本発明は、実施の形態で説明した構成と実質的に同一の構成(例えば、機能、方法および結果が同一の構成、あるいは目的及び効果が同一の構成)を含む。また、本発明は、実施の形態で説明した構成の本質的でない部分を置き換えた構成を含む。また、本発明は、実施の形態で説明した構成と同一の作用効果を奏する構成又は同一の目的を達成することができる構成を含む。また、本発明は、実施の形態で説明した構成に公知技術を付加した構成を含む。
【符号の説明】
【0057】
1 試料室、2 壁部、4 シフター支持部材、6 球面軸受部、
10 管状部材(シフター)、11 端面、12 孔、14 ベアリング、
16 球面部、19 Oリング、20 試料ホルダー、21 カバー部、
22 第1部分、23 試料保持部、24 第2部分、25 溝、26 第3部分、
27 接触面、30 Oリング、40 リニアガイド、42a,42b ガイド溝、
44 ボール、50 弾性部材、52 ストッパー、53 孔、54 突起部、
55a 第1側面、55b 第2側面、60 X駆動機構、61 ベアリング、
62 レバー、63 軸、64 Xモーター、66 平歯車対、68 X送りねじ、
69 ベローズ、70 Y駆動機構、74 Yモーター、76 平歯車対、
78 Y送りねじ、79 戻しばね、100 試料位置決め装置
【特許請求の範囲】
【請求項1】
減圧状態に維持可能な試料室と、
前記試料室に連通する孔を有する管状部材と、
前記孔に移動可能に装着される試料ホルダーと、
前記試料ホルダーに装着され、前記管状部材の内面に接するOリングと、
前記試料室における前記試料ホルダーの位置を変える駆動機構と、
を含み、
前記試料ホルダーは、
先端部が前記試料室に配置される第1部分と、
前記孔に配置される第2部分と、
を有し、
前記第1部分は、前記先端部に、試料を保持可能な試料保持部を有し、
前記第2部分は、リニアガイドを介して、前記第1部分を移動可能に支持し、
前記Oリングは、前記第2部分に装着され、
前記駆動機構は、前記第1部分を移動させる、荷電粒子線装置の試料位置決め装置。
【請求項2】
請求項1において、
前記試料ホルダーは、前記第1部分と前記第2部分とを接続する弾性部材を有する、荷電粒子線装置の試料位置決め装置。
【請求項3】
請求項1または2において、
前記試料ホルダーは、前記第1部分の移動を制限するストッパーを有する、荷電粒子線装置の試料位置決め装置。
【請求項4】
請求項1ないし3のいずれか1項において、
前記試料ホルダーは、前記第2部分に接続された第3部分を、さらに有し、
前記第3部分は、前記孔の径よりも大きい幅を有する、荷電粒子線装置の試料位置決め装置。
【請求項1】
減圧状態に維持可能な試料室と、
前記試料室に連通する孔を有する管状部材と、
前記孔に移動可能に装着される試料ホルダーと、
前記試料ホルダーに装着され、前記管状部材の内面に接するOリングと、
前記試料室における前記試料ホルダーの位置を変える駆動機構と、
を含み、
前記試料ホルダーは、
先端部が前記試料室に配置される第1部分と、
前記孔に配置される第2部分と、
を有し、
前記第1部分は、前記先端部に、試料を保持可能な試料保持部を有し、
前記第2部分は、リニアガイドを介して、前記第1部分を移動可能に支持し、
前記Oリングは、前記第2部分に装着され、
前記駆動機構は、前記第1部分を移動させる、荷電粒子線装置の試料位置決め装置。
【請求項2】
請求項1において、
前記試料ホルダーは、前記第1部分と前記第2部分とを接続する弾性部材を有する、荷電粒子線装置の試料位置決め装置。
【請求項3】
請求項1または2において、
前記試料ホルダーは、前記第1部分の移動を制限するストッパーを有する、荷電粒子線装置の試料位置決め装置。
【請求項4】
請求項1ないし3のいずれか1項において、
前記試料ホルダーは、前記第2部分に接続された第3部分を、さらに有し、
前記第3部分は、前記孔の径よりも大きい幅を有する、荷電粒子線装置の試料位置決め装置。
【図1】


【図2】

【図3】
【図4】
【図2】
【図3】
【図4】
【公開番号】特開2012−151028(P2012−151028A)
【公開日】平成24年8月9日(2012.8.9)
【国際特許分類】
【出願番号】特願2011−9781(P2011−9781)
【出願日】平成23年1月20日(2011.1.20)
【出願人】(000004271)日本電子株式会社 (811)
【Fターム(参考)】
【公開日】平成24年8月9日(2012.8.9)
【国際特許分類】
【出願日】平成23年1月20日(2011.1.20)
【出願人】(000004271)日本電子株式会社 (811)
【Fターム(参考)】
[ Back to top ]