
荷電粒子線装置
【課題】荷電粒子線の状態が変化した場合、高精度かつ高速に光軸調整を可能とする荷電粒子線装置を提供する。
【解決手段】試料に荷電粒子線を照射し、該試料から発生する二次信号から画像を生成する荷電粒子線装置として、荷電粒子線を試料へ集束させる電磁界重畳レンズと、荷電粒子線を試料に対して減速させるリターディング電極と、記試料から発生する二次信号を検出器へ引上げるブースティング電極と、荷電粒子線の光軸調整を、リターディング電極に印加する電圧の可変制御による調整とブースティング電極に印加する電圧の可変制御による調整のいずれかを選択的に実行するコンピュータとを搭載するものを提供する。
【解決手段】試料に荷電粒子線を照射し、該試料から発生する二次信号から画像を生成する荷電粒子線装置として、荷電粒子線を試料へ集束させる電磁界重畳レンズと、荷電粒子線を試料に対して減速させるリターディング電極と、記試料から発生する二次信号を検出器へ引上げるブースティング電極と、荷電粒子線の光軸調整を、リターディング電極に印加する電圧の可変制御による調整とブースティング電極に印加する電圧の可変制御による調整のいずれかを選択的に実行するコンピュータとを搭載するものを提供する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、電磁界重畳型レンズを有する荷電粒子線装置において光軸ずれを高精度かつ高速に調整できる技術に関する。
【背景技術】
【0002】
荷電粒子線装置は、細く収束されたビームを試料上に照射することにより、試料から所望の情報(例えば試料像)を得る。従って、荷電粒子線装置では、レンズに対する光軸にずれがあると、レンズ収差が発生し試料像の解像度が低下する。このため、分解能の高い試料像を得るには高精度な光軸調整が必要である。従来の光軸調整では、対物レンズの励磁電流を周期的に変化させ、その際における試料像の動きが最小になるように、光軸調整用アライナーの設定値を決定する。このような光軸調整を自動的に実行する技術として、特許文献1や特許文献2に開示される技術がある。
【0003】
これら特許文献には、対物レンズを対象とした光軸調整について、その原理と具体的な方法が説明されている。すなわち、あるアライナーの偏向条件において対物レンズの励磁電流を2つの条件に変化させて、その時に検出される試料像のずれを方程式に当てはめることにより、最適なアライナー補正量を決定する方法が説明されている。
【0004】
一方、走査電子顕微鏡に代表される荷電粒子線装置では、近年におけるパターンの微細化に伴い、低照射エネルギーでありながら、高分解能かつ高倍率の出力が得られるように構成が最適化されている。例えばリターディング電極やブースティング電極が配置されている。なお、リターディング電極は、試料に負電位を印加して試料直前でビームを減速させるために使用される電極をいう。また、ブースティング電極は、ビームが対物レンズ中を高加速状態で通過するように正電位が印加される電極をいい、対物レンズの近傍に設置される。
【0005】
このような電磁界重畳レンズを有する荷電粒子線装置においても、レンズ収差の影響を軽減することを目的に、対物レンズを対象とした光軸の調整技術が適用されている。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2002−352758号公報
【特許文献2】特開2003−22771号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
前述したような電磁界重畳レンズを有する荷電粒子線装置において、対物レンズの励磁電流を変化させて光軸調整を行う場合、磁界特有のヒステリシスによる不正確性やコイル特有のインダクタンスによる応答遅れの影響を受ける。このため、試料像からの視差検出には誤差が多分に含まれる。また、ヒステリシスやインダクタンスの影響を軽減するための処理が必要となる。従って、光軸調整を高精度かつ高速度に実行することが困難であった。
【0008】
また、電磁界重畳レンズを有する荷電粒子線装置では、対物レンズ近傍に設置しているブースティング電極やリターディング電極の印加電圧を変化させることで、高速にビームの焦点を補正する機能を有している。しかし、電磁界重畳レンズを有する荷電粒子線装置では、対物レンズの光軸と電極の光軸とが一致しないことがある。その状態で電極の印加電圧を変化させて焦点補正を行った場合、光軸のずれから試料像の視野移動を誘発し、焦点補正に失敗するといった問題があった。
【0009】
本発明の目的は、電磁界重畳型レンズを有した荷電粒子線装置において、光軸ずれを高精度かつ高速に調整できる荷電粒子線装置を提供することにある。
【課題を解決するための手段】
【0010】
上記目的を達成するため、荷電粒子線を試料へ集束させる電磁界重畳レンズと、荷電粒子線を試料に対して減速させるリターディング電極と、試料から発生する二次信号を検出器へ引上げるブースティング電極と、荷電粒子線の光軸調整を目的として、リターディング電極への印加電圧の調整とブースティング電極への印加電圧の調整のいずれかを選択的に実行するコンピュータとを有する荷電粒子線装置を提供する。
【発明の効果】
【0011】
本発明によれば、電極に印加する電圧を変化させて試料像の視差を検出するので、磁界特有のヒステリシスやコイル特有のインダクタンスの影響を無くすことができる。これにより、高精度かつ高速に光軸ずれを調整することができ、高分解能像を安定的に得ることができる。
【図面の簡単な説明】
【0012】
【図1】荷電粒子線装置の概略構成例を示す図である。
【図2】電極の印加電圧を変化させて光軸調整を行うための実行画面例を示す図である。
【図3】電極の印加電圧を変化させる自動光軸調整実行時の処理フロー例を示す図である。
【図4】電極に対する印加電圧を自動的に変化させる光軸調整を選択した場合の条件設定画面例を示す図である。
【図5】光軸ずれと光軸調整との関係を説明する図である。
【図6】光軸ずれを検出した場合に表示されるメッセージ例を示す図である。
【図7】電極に対する印加電圧を自動的に変化させる光軸調整を選択した場合の処理フロー例を示す図である。
【図8】電極の印加電圧を変化させる自動光軸調整実行時の他の処理フロー例を示す図である。
【発明を実施するための形態】
【0013】
以下、発明に係る荷電粒子線装置の形態例を図面に基づいて説明する。
(1)形態例1
(1−1)全体構成
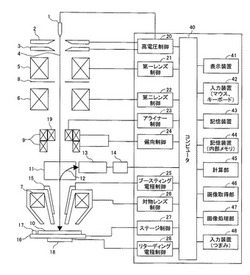
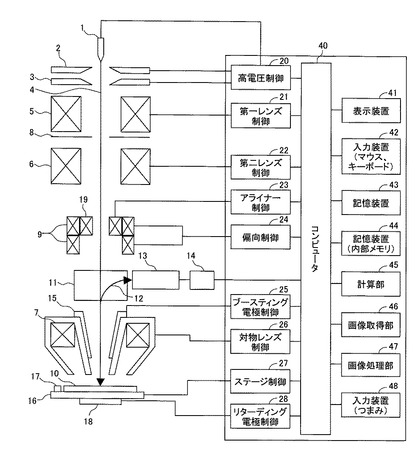
図1に、形態例に係る荷電粒子線装置の概略構成図を示す。陰極1と第一陽極2の間には、コンピュータ40で制御する高電圧制御電源20により電圧が印加され、所定のエミッション電流で一次電子線4が陰極1から引き出される。ここで、コンピュータ40は、算術論理ユニット、制御回路、記憶装置、入出力装置で構成され、後述する光軸調整動作は記憶装置43から読み出されるプログラムの一機能として実行される。
【0014】
陰極1と第二陽極3の間には、コンピュータ40で制御する高電圧制御電源20により加速電圧が印加され、陰極1から放出された一次電子線4を加速し後段のレンズ系に進行する。一次電子線4は、第一レンズ制御電源21で制御する第一収束レンズ5で収束され、絞り板8で一次電子線の不要な領域が除去された後に、第二レンズ制御電源22で制御する第二収束レンズ6、対物レンズ制御電源26で制御する対物レンズ7により、試料10に微小スポットとして収束される。対物レンズ7は、インレンズ方式、アウトレンズ方式、及びシュノーケル方式(セミインレンズ方式)など、種々の形態をとることができる。
【0015】
一次電子線4は、偏向制御電源24で制御する走査コイル9で試料10上を二次元的に走査する。一次電子線4の照射で試料10から発生した二次電子等の二次信号12は、対物レンズ近傍に設置したブースティング電極制御電源25で制御するブースティング電極15により引き上げられ、対物レンズ7の上部に進行した後、二次信号分離用直交電磁界(EXB)発生器11により、一次電子と分離されて二次信号検出器13に検出される。二次信号検出器13で検出された信号は、信号増幅器14で増幅された後、記憶装置(内部メモリ)44に転送されて表示装置41に試料像として表示される。
【0016】
走査コイル9の近傍又は同じ位置には、アライナー制御電源23で制御する1段の光軸調整用アライナー19が配置されている。試料10はステージ16にセットされ、ステージ制御電源27からの制御信号によってステージ16が移動することにより、試料上又はステージ上の任意の位置に移動することができる。また、ステージ上には光軸補正を行うための専用パターン17を配置することができる。さらに、ステージ16は、試料上で一次電子線4を減速するためにリターディング電極制御電源28で制御するリターディング電極18を備える。
【0017】
各種制御電源20から28は、コンピュータ40によって制御される電源である。表示装置41には、二次電子等の信号が増幅された試料の拡大像が表示される他、電子光学系の設定や走査条件の設定を行うための種々な操作ボタンや、光軸調整条件の確認や光軸調整の開始を指示するボタンを表示させることができる。
【0018】
他にコンピュータ40には、表示装置41に表示された試料像を画像情報として取得するための画像取得部46と、これら試料像に対して画像処理を行う画像処理部47と、この画像処理の結果から光軸調整用アライナー19の補正量を計算する計算部45と、試料像や計算結果を保存するための記憶装置43と、光軸調整条件などを入力するための入力装置(マウス、キーボード)42と48(つまみ)が接続されている。
【0019】
(1−2)光軸調整画面
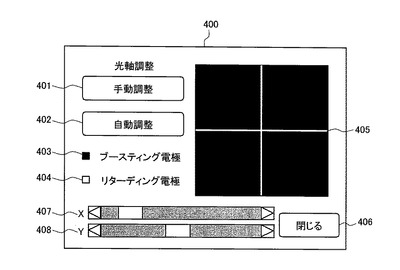
図2に、光軸調整を行うための実行画面例を示す。この画面は表示装置41に表示され、オペレータはこの画面を使って実行条件を設定し、光軸調整を開始する。なお、この画面の表示と操作入力の受付は、コンピュータ40で実行されるプログラムを通じて実現される。
【0020】
まず、手動で電極の印加電圧を変化させる光軸調整(手動光軸調整)について説明する。オペレータは光軸調整を行うか否かを判断し、調整を行う場合は表示装置41に実行画面400を起動する。次にオペレータは、印加電圧を変化させる対象として、ブースティング電極403又はリターディング電極404を選択し、手動調整ボタン401を押す。手動調整ボタン401が押されたことをきっかけに、先程選択した電極の印加電圧を周期的に変化させる。この印加電圧の変化の下で、試料10を二次元的に走査し得られた試料像が像表示画面405上に表示される。オペレータは、その試料像のずれの動きが最小になるように、入力装置42(マウスやキーボード)を使ってXスケール407とYスケール408のスライダ位置を変更し、偏向制御電源24に与える制御値を変更することにより光軸調整用アライナー19を調整する。また入力装置48の二つのつまみXとYを回すことで光軸調整用アライナー19を調整し、光軸を調整することも可能である。
【0021】
次に、自動制御によって電極の印加電圧を変化させる光軸調整(自動光軸調整)について説明する。オペレータが自動光軸調整を行う場合は、表示装置41に実行画面400を起動し、印加電圧を変化させる対象として、ブースティング電極403又はリターディング電極404を選択した後、自動調整ボタン402を押す。すると、コンピュータ40は、先程選択した電極を変化対象として光軸調整を開始する。自動光軸調整に関するアライナー補正量の算出方法や処理フローの詳細については後述する。
【0022】
像表示画面405には、光軸調整中の試料像がリアルタイムに表示される。この像表示画面405を目視することにより、オペレータは、光軸調整が適正に行われているか否かを確認することができる。例えば明らかに焦点がずれた状態で光軸調整を行った場合、像表示画面405には焦点のずれた、ぼけた像が表示されるので、オペレータはその状況を見て、自動光軸調整の信頼性を判断することができる。手動又は自動での光軸調整を終了した後、オペレータはボタン406を押して実行画面400を閉じ、光軸調整を終了する。
【0023】
以上のように、この形態例の場合には、電極に印加する電圧を変化させる手動光軸調整又は自動光軸調整を、実行画面400に対するオペレータの操作入力を通じて選択的に実行することができる。これにより、荷電粒子線装置の使用条件に応じた適正な補正動作を選択することが可能になる。なお、形態例の場合には、実行画面400に調整種類の選択用の操作子としてボタンやスケールを表示する場合について説明したが、調整種類の選択方法等はこれらに限らない。
【0024】
(1−3)光軸調整用アライナーの補正量の算出方法
ここでは、自動光軸調整が選択された場合に実行される光軸調整用アライナー19の補正量の算出方法について説明する。光軸調整用アライナー19は、通常、二次元(X、Y)方向に一次電子線を調整できる。アライナーの初期状態(X0、Y0)に対するアライナー偏向量を(X1、Y1)とした時、光軸のずれWi は複素数を用いて表すと次式(1)の関係となる。
【0025】
【数1】

【0026】
ここで、Cは、光軸ずれの初期状態を複素数で表したものである。Dは、電子光学系の動作条件に依存する光軸調整像の移動感度を複素数で表したものである。εは、光軸調整用アライナー19のX方向に対するY方向の相対感度(感度比及び光軸調整用アライナー19の直交ずれを示す。)を複素数で表したものである。光軸調整の目的は、式(1)に示したWi を0にするアライナーの補正量(X1,Y1)を求めることに対応する。従って、式(1)において左辺を0にするためのアライナー補正量(Xopt、Yopt)は式(2)の関係になる。
【0027】
【数2】
【0028】
ここで、ε及びC/Dは未知数であるため、アライナー変化量(X1,Y1)をSだけ変化させた後、電極を2つの条件に変化させることで発生する試料像のずれを画像処理で計測することにより、ε及びC/Dを求めることができる。表1に、アライナーの変化量(X1,Y1)に対する試料像のずれWi の関係を示す。なお、試料像のずれを求める画像処理技術は、種々の方法があり十分既知の技術である。
【0029】
【表1】
【0030】
表1に示した各アライナー変化量に対して、電極を2つの条件に変化させることで検出した試料像のずれ(W1 、W2 、W3 )から、εとC/Dを解くと、それぞれ、式(3)、式(4)に示す関係となる。
【0031】
【数3】
【0032】
【数4】
【0033】
式(3)、(4)で得られた結果を式(2)に代入することにより、光軸調整用アライナー19の補正量(Xopt,Yopt)を求めることができる。また、W3−W1とW2−W1は、光軸調整用アライナー19を一方に調整した時に得られる第1の試料像のずれと、他方に調整した時に得られる第2の試料像のずれであり、本形態例ではこの2つの試料像のずれに基づいて、光軸調整のためのアライナーの感度を検出している。
【0034】
このような手法によれば、電極の印加電圧を変化させて得られる試料像のずれから光軸調整用アライナー19の補正量を算出することが可能になる。
【0035】
(1−4)自動光軸調整の処理フロー
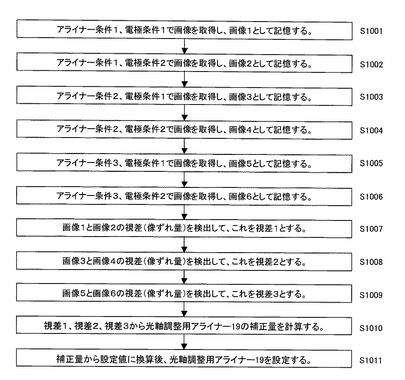
図3に、自動光軸調整の処理フロー例を示す。後述するS1001からS1011までの処理は、コンピュータ40の処理命令に基づいて順番に実行される。
【0036】
(S1001)
光軸調整用アライナー19の現在の設定条件、又は予め決められた条件をアライナー条件1(Bxo, Byo)として光軸調整用アライナー19に設定し、変更対象に選択された電極(ブースティング電極15又はリターディング電極18)の現在値(合焦状態を与える電圧値)に予め決められた値だけフォーカスをずらしたアライナー条件1を設定する。このアライナー条件1と電極条件1において、画像取得部46を使って画像1を取得する。
【0037】
(S1002)
光軸調整用アライナー19の条件をそのままにして、変更対象の電極に予め決められた値だけフォーカスをずらしたアライナー条件2を設定し、アライナー条件1と電極条件2において画像2を取得する。
【0038】
(S1003)
光軸調整用アライナー19に条件2(Bxo +S,Byo)を設定し、その上で、S1001と同様に変更対象の電極を電極条件1に設定し、アライナー条件2と電極条件1において画像3を取得する。
【0039】
(S1004)
光軸調整用アライナー19の条件をそのままにして、S1002と同様に、変更対象の電極を電極条件2に設定し、アライナー条件2と電極条件2において画像4を取得する。
【0040】
(S1005)
光軸調整用アライナー19に条件3(Bxo,Byo+S)を設定し、その上で、S1001と同様に変更対象の電極を電極条件1に設定し、アライナー条件3と電極条件1において画像5を取得する。
【0041】
(S1006)
光軸調整用アライナー19の条件をそのままにして、S1002と同様に変更対象の電極を電極条件2に設定し、アライナー条件3と電極条件2において画像6を取得する。
【0042】
(S1007)
画像1と画像2の視差(試料像のずれ)を画像処理部47により検出し、これを視差1として記憶装置43に記憶する。画像間の視差は、例えば、画像1と画像2の画像を互いに画素単位でずらしながら画像相関を求め、画像相関値が最大になる画像のずらし量から検出することが可能である。その他、視差の検出が可能な画像処理ならば、本形態例に適用することができる。
【0043】
(S1008)
画像3と画像4の視差を画像処理部47により検出して、これを視差2として記憶する。
【0044】
(S1009)
画像5と画像6の視差を画像処理部47により検出して、これを視差3として記憶する。
【0045】
(S1010)
S1007からS1009で求めた視差1、視差2、視差3と前述した式(1)〜(4)とを使い、光軸調整用アライナー19の補正量(Bx1, By1)を計算部45で算出する。
【0046】
(S1011)
S1010で決定した光軸調整用アライナー19の補正量(Bx1, By1)を、アライナー制御電源23を通じて光軸調整用アライナー19に設定する。
【0047】
なお、光軸調整用アライナー19や調整対象に選択した電極の印加電圧を変化させた時に、試料像の移動量が常に一定であることが望ましい。これは、移動量が大きすぎると、試料像が画像領域からはみ出してしまう可能性があり、また、移動量が小さすぎると、画像処理にて試料像が移動していないと判断してしまう可能性があるためである。そこで、試料像の移動量が常に一定になるように、表示倍率に連動して光軸調整用アライナー19やブースティング電極15、リターディング電極18に印加する電圧の制御量を決定すれば、試料像の移動量を一定にすることができる。
【0048】
また、図3に示す処理フローでは、動作の理解が容易な手順で記載したが、画像の取り込み順番は処理に影響を与えない。従って、実際の処理では、処理の高速化を図るために、例えば変更対象の電極を電極条件1に設定して、画像1、画像3、画像5を連続で取り込み、次に変更対象の電極を電極条件2に設定して、画像2、画像4、画像6を連続で取り込むことが可能である。
【0049】
従来は、画像間の視差を検出するために対物レンズを変化させていた。そのため、視差検出におけるヒステリシスやインダクタンスの影響を軽減するため、前述した処理フローにヒステリシス除去や応答待ち時間の処理を入れる必要があった。しかし、本形態例の場合には、視差を電極電位の制御によって検出するため、ヒステリシス除去や応答待ち時間の処理を必要としない。従って、形態例の場合には、対物レンズを駆動制御する場合よりも高精度かつ高速に光軸ずれを調整することが可能になる。
【0050】
(1−5)条件設定画面
ここでは、荷電粒子線装置の自動運転機能において、ブースティング電極15又はリターディング電極18に印加する電圧を変化させて光軸調整を実行する場合に適用する条件の設定方法について説明する。
【0051】
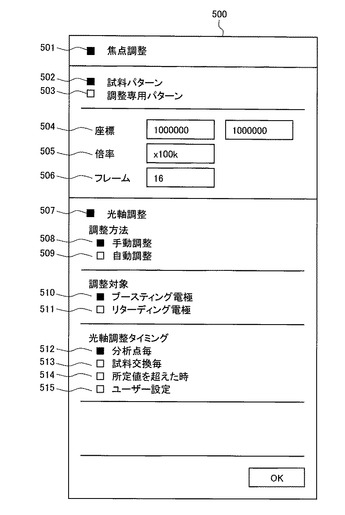
図4に、自動運転機能の実行時に使用する条件設定画面例を示す。この条件設定画面500は、自動運転を実行するためのレシピファイルの1つとして表示装置41に表示される。
【0052】
まず、オペレータは条件設定画面500を起動した後、焦点調整のオン/オフを選択する。通常、自動運転機能において光軸調整を適用する場合、フラグ501をオンにして実行する。所定のパターン位置に移動すると、試料の高さが移動前に合わせた焦点の位置からずれる場合がある。このずれた状態で光軸調整を行うと、焦点の合わない、ぼけたパターンから試料像のずれを検出することになるので、光軸調整精度が悪くなる。そのため、焦点調整を行った後に試料像のずれを検出することで、この問題を解消する。
【0053】
次に、光軸調整に用いる試料パターンフラグ502又は調整専用パターンフラグ503を選択する。フラグ502又は503を選択することで、ステージ上の試料10又は調整用パターン17の何れを用いるかを決定する。試料パターンフラグ502を選択した場合、併せてパターンのステージ座標、試料像取得倍率、試料像を取得する際のフレーム数を、それぞれ数値入力ウィンドウ504、505、506から入力する。調整専用パターンフラグ503を選択した場合は、予め記憶装置43に保存してあるステージ座標、倍率、フレーム数がそれぞれの数値入力ウィンドウに設定される。なお、ここで設定されるフレーム数とは、パターンの像を形成するための走査像の積算回数である。
【0054】
次に、光軸調整のオン/オフを選択する。光軸調整フラグ507がオンならば、光軸調整を実施する。フラグ507がオフならば光軸調整を行わないため、光軸ずれが起きないような環境で選択することが望ましい。
【0055】
光軸調整フラグ507がオンの場合に、光軸の調整方法として手動調整フラグ508又は自動調整フラグ509のいずれかを選択することができる。手動調整フラグ508とは、前述した実行画面400を使用し、実行画面上のスケールや入力装置であるつまみ等でブースティング電極15又はリターディング電極18の印加電圧を調整する光軸調整モードである。自動調整フラグ509とは、図3で説明した処理フローに従い、ブースティング電極15又はリターディング電極18の印加電圧を変化させて試料像のずれを検出し、光軸調整用アライナー19の補正量を算出することで光軸調整を行うモードである。この自動光軸調整は全自動で補正を実行するので、オペレータによる調整精度や調整時間のバラツキがなくなり、安定した光軸調整が可能となる。
【0056】
また、光軸の調整時に印加電圧を変化させる電極の選択は、ブースティング電極フラグ510又はリターディング電極フラグ511の選択により行う。ブースティング電極フラグ510を選択すると、ブースティング電極15に印加する電圧の制御による光軸調整が実行され、リターディング電極フラグ511を選択すると、リターディング電極18に印加する電圧の制御による光軸調整が実行される。
【0057】
次に、オペレータは、自動運転実行時における光軸調整のタイミングを選択する。例えば光軸ずれの頻度が高いような場合は、光軸調整精度を考慮して分析点毎512を設定し、分析点毎に光軸調整を行う。光軸ずれがあまり発生しないようであれば、スループットを考慮して試料交換毎513を選択し、荷電粒子線装置で使用する試料を交換する度に光軸調整を行うと良い。このような選択肢を設けることで、荷電粒子線装置の使用条件や環境等に基づいて、適正な光軸調整タイミングを選択することが可能になる。
【0058】
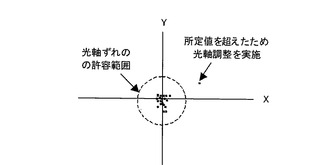
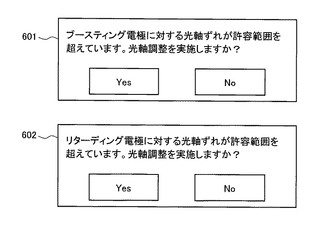
また、所定値を超えた時514を選択すると、分析点毎又は試料交換毎に、電極の電圧変化量ΔVに対する視差ΔWiを検出し、視差ΔWiの記録を開始する。この視差ΔWiの大きさは、ビームが光軸からどれだけずれているかを表すものであり、この値を記録して比較することで、光軸ずれの程度を判断することが可能となる。図5に示すように、この視差ΔWiが予め決められた光軸ずれの許容範囲(破線で囲んで示す。)を越えた場合、自動的に光軸調整が実行される。またΔWiが光軸ずれの許容範囲を越えた場合には、光軸調整が必要である旨を通知する図6に例示するようなメッセージ601又は602を表示し、オペレータに光軸調整の判断を任せても良い。この他、ユーザー設定515を選択し、予め別途登録されたタイミングで光軸調整を実行させることもできる。
【0059】
以上のように、レシピファイルの一つとして、条件設定画面により光軸調整に関する条件を選択できるようにしておけば、自動運転時にも、電極を用いた光軸調整を適用することができる。
【0060】
なお、本形態例では、自動運転機能の条件設定画面を説明するためにフラグを用いたが、フラグの表記や調整種類の選択方法の表現はこれに限るものではない。
【0061】
(1−6)自動運転実行時の処理フロー
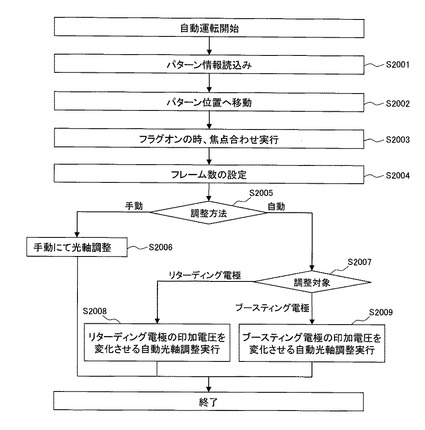
図7に、自動運転を実行した場合の処理フローを示す。後述するS2001からS2009までの処理は、オペレータが条件設定画面500を通じて各種の条件を設定した後に、コンピュータ40の処理命令に基づいて自動的に開始される。
【0062】
(S2001)
まず、予め記憶装置43に登録されているパターン情報を読み出し、倍率等の光学条件から光軸調整に必要なパラメータであるアライナー変化量(S)や電極の変化量を決定する。
【0063】
(S2002)
パターン情報からステージ座標を取り出し、パターン位置へ移動する。条件設定画面500において調整専用パターンフラグ503が選択されている場合は、調整用パターン17が一次電子線の直下に位置付けられるようにステージを移動する。この移動の際に数値入力ウィンドウ505に入力された倍率に従って、偏向制御電源24から走査コイル9に供給される電流値が設定される。
【0064】
(S2003)
前記条件設定画面の焦点調整フラグ501のオン/オフを判定し、オンの場合は焦点調整を実行する。
【0065】
(S2004)
数値入力ウィンドウ506に入力されているフレーム数分の画像を積算して試料像を形成する。
【0066】
(S2005)
光軸調整フラグ507がオンの場合、調整方法として手動調整フラグ508が選択されているか自動調整フラグ509が選択されているかを判定する。
【0067】
(S2006)
手動調整フラグ508がオンの場合、光軸調整タイミングで設定したタイミングに、前述した実行画面400が起動される。像表示画面405には、オペレータが選択した電極の印加電圧が周期的に変化している試料像が連続的に表示され、その像の動きを最小とするように、スケールもしくはつまみを使って光軸調整用アライナー19を調整する。
【0068】
(S2007)
一方、自動調整フラグ509がオンであった場合、オペレータが選択した電極が判定される。すなわち、ブースティング電極フラグ510が選択されているか、リターディング電極フラグ511が選択されているかが判定される。
【0069】
(S2008)
リターディング電極フラグ511が選択されていた場合、リターディング電極18の印加電圧を変化させて試料像のずれを検出した後、アライナーへの補正量を算出し、光軸調整用アライナー19に設定する。
【0070】
(S2009)
ブースティング電極フラグ510が選択されていた場合、ブ―スティング電極15の印加電圧を変化させて試料像のずれを検出した後、アライナーへの補正量を算出し、光軸調整用アライナー19に設定する。
【0071】
なお、本形態例では、条件設定画面500のブースティング電極フラグ510又はリターディング電極フラグ511によって、ブースティング電極15とリターディング電極18をオペレータが選択しているが、状況によってはコンピュータ40の制御によってこれらの選択を実行しても良い。
【0072】
以上のように、自動運転機能においても、電極に印加する電圧を変化させる光軸調整を適用することで、磁界特有のヒステリシスやコイル特有のインダクタンスによる視差検出誤差や軽減処理がなくなり、高精度かつ高速に光軸調整を行うことが可能になる。
【0073】
(2)他の形態例
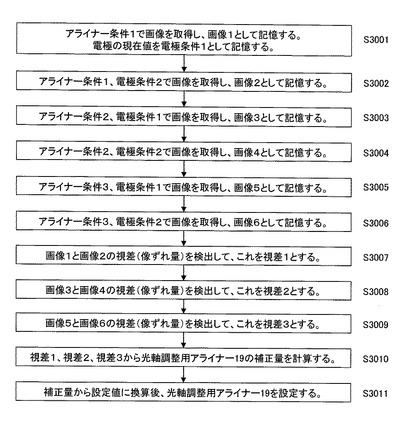
前述した形態例の場合には、自動光軸調整の処理フローにおいて、試料像のずれを検出するために、フォーカスを合焦状態からずらす2つの電極条件に変化させ、その条件で取得した画像を比較した。しかしながら、フォーカスの合焦状態を与える電極条件とフォーカスをずらす電極条件で取得される画像を比較しても光軸調整が可能である。図8に、フォーカスをずらす前の電極条件とフォーカスをずらす電極条件を使用した自動光軸調整の処理フローを示す。なお、後述するS3001からS3011までの処理は、コンピュータ40の処理命令に基づいて順番に実行される。
【0074】
(S3001)
光軸調整用アライナー19の現在の設定条件、又は予め決められた条件をアライナー条件1(Bxo, Byo)として光軸調整用アライナー19に設定し、画像取得部46を使って画像1を取得する。この時、変更対象の電極(ブースティング電極15又はリターディング電極18)の現在値(合焦状態を与える電圧値)をアライメント条件1として記憶する。
【0075】
(S3002)
光軸調整用アライナー19の条件をそのままにして、変更対象の電極の現在値(合焦状態を与える電圧値)に予め決められた値だけフォーカスをずらすアライメント条件2を設定する。このアライナー条件1と電極条件2において画像2を取得する。
【0076】
(S3003)
光軸調整用アライナー19にアライナー条件2(Bxo +S,Byo)を設定して、S3001で記憶した電極条件1に戻し、アライナー条件2と電極条件1において画像3を取得する。
【0077】
(S3004)
光軸調整用アライナー19の条件をそのままにして、S3002と同様に、変更対象の電極を電極条件2に設定し、アライナー条件2と電極条件2において画像4を取得する。
【0078】
(S3005)
光軸調整用アライナー19に条件3(Bxo,Byo+S)を設定して、S3001で記憶した電極条件1に戻し、アライナー条件3と電極条件1において画像5を取得する。
【0079】
(S3006)
光軸調整用アライナー19の条件をそのままにして、S3002と同様に、変更対象の電極を電極条件2に設定し、アライナー条件3と電極条件2において画像6を取得する。
【0080】
(S3007)
画像1と画像2の視差(試料像のずれ)を画像処理部47により検出し、これを視差1として記憶装置43に記憶する。
【0081】
(S3008)
画像3と画像4の視差を画像処理部47により検出して、これを視差2として記憶する。
【0082】
(S3009)
画像5と画像6の視差を画像処理部47により検出して、これを視差3として記憶する。
【0083】
(S3010)
S3007からS3009で求めた視差1、視差2、視差3と前述した式(1)〜(4)とを使い、光軸調整用アライナー19の補正量(Bx1, By1)を計算部45で算出する。
【0084】
(S3011)
S3010で決定したアライナー補正量(Bx1, By1)を、アライナー制御電源23を通じて光軸調整用アライナー19に設定する。
【0085】
なお、図8に示す処理フローでは、動作の理解が容易な手順で記載したが、画像の取り込み順番は処理に影響を与えない。従って、実際の処理では、処理の高速化を図るために、例えばフォーカスが合焦状態にある電極条件で、画像1、画像3、画像5を連続で取り込み、次にフォーカスをずらす電極条件にして、画像2、画像4、画像6を連続で取り込むことが可能である。また、この際、フォーカスをずらす電極条件には、フォーカスが合焦状態にある電極条件に対して印加電圧が高い場合と低い場合の2種類が考えられる。これらは、適用する荷電粒子線装置の特性に応じて選択的に用いれば良い。
【符号の説明】
【0086】
1:陰極
2:第一陽極
3:第二陽極
4:一次電子線
5:第一収束レンズ
6:第二収束レンズ
7:対物レンズ
8:絞り板
9:走査コイル
10:試料
11:二次信号分離用直交電磁界(EXB)発生器
12:二次信号
13:二次信号用検出器
14:信号増幅器
15:ブースティング電極
16:ステージ
17:光軸調整用パターン
18:リターディング電極
19:光軸調整用アライナー
20:高圧制御電源
21:第一収束レンズ制御電源
22:第二収束レンズ制御電源
23:アライナー制御電源
24:偏向制御電源
25:ブースティング電極制御電源
26:対物レンズ制御電源
27:ステージ制御電源
28:リターディング電極制御電源
40:コンピュータ
41:表示装置
42:入力装置(マウス・キーボード)
43:記憶装置
44:記憶装置(内部メモリー)
45:計算部
46:画像取得部
47:画像処理部
48:入力装置(調整用つまみ)
【技術分野】
【0001】
本発明は、電磁界重畳型レンズを有する荷電粒子線装置において光軸ずれを高精度かつ高速に調整できる技術に関する。
【背景技術】
【0002】
荷電粒子線装置は、細く収束されたビームを試料上に照射することにより、試料から所望の情報(例えば試料像)を得る。従って、荷電粒子線装置では、レンズに対する光軸にずれがあると、レンズ収差が発生し試料像の解像度が低下する。このため、分解能の高い試料像を得るには高精度な光軸調整が必要である。従来の光軸調整では、対物レンズの励磁電流を周期的に変化させ、その際における試料像の動きが最小になるように、光軸調整用アライナーの設定値を決定する。このような光軸調整を自動的に実行する技術として、特許文献1や特許文献2に開示される技術がある。
【0003】
これら特許文献には、対物レンズを対象とした光軸調整について、その原理と具体的な方法が説明されている。すなわち、あるアライナーの偏向条件において対物レンズの励磁電流を2つの条件に変化させて、その時に検出される試料像のずれを方程式に当てはめることにより、最適なアライナー補正量を決定する方法が説明されている。
【0004】
一方、走査電子顕微鏡に代表される荷電粒子線装置では、近年におけるパターンの微細化に伴い、低照射エネルギーでありながら、高分解能かつ高倍率の出力が得られるように構成が最適化されている。例えばリターディング電極やブースティング電極が配置されている。なお、リターディング電極は、試料に負電位を印加して試料直前でビームを減速させるために使用される電極をいう。また、ブースティング電極は、ビームが対物レンズ中を高加速状態で通過するように正電位が印加される電極をいい、対物レンズの近傍に設置される。
【0005】
このような電磁界重畳レンズを有する荷電粒子線装置においても、レンズ収差の影響を軽減することを目的に、対物レンズを対象とした光軸の調整技術が適用されている。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2002−352758号公報
【特許文献2】特開2003−22771号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
前述したような電磁界重畳レンズを有する荷電粒子線装置において、対物レンズの励磁電流を変化させて光軸調整を行う場合、磁界特有のヒステリシスによる不正確性やコイル特有のインダクタンスによる応答遅れの影響を受ける。このため、試料像からの視差検出には誤差が多分に含まれる。また、ヒステリシスやインダクタンスの影響を軽減するための処理が必要となる。従って、光軸調整を高精度かつ高速度に実行することが困難であった。
【0008】
また、電磁界重畳レンズを有する荷電粒子線装置では、対物レンズ近傍に設置しているブースティング電極やリターディング電極の印加電圧を変化させることで、高速にビームの焦点を補正する機能を有している。しかし、電磁界重畳レンズを有する荷電粒子線装置では、対物レンズの光軸と電極の光軸とが一致しないことがある。その状態で電極の印加電圧を変化させて焦点補正を行った場合、光軸のずれから試料像の視野移動を誘発し、焦点補正に失敗するといった問題があった。
【0009】
本発明の目的は、電磁界重畳型レンズを有した荷電粒子線装置において、光軸ずれを高精度かつ高速に調整できる荷電粒子線装置を提供することにある。
【課題を解決するための手段】
【0010】
上記目的を達成するため、荷電粒子線を試料へ集束させる電磁界重畳レンズと、荷電粒子線を試料に対して減速させるリターディング電極と、試料から発生する二次信号を検出器へ引上げるブースティング電極と、荷電粒子線の光軸調整を目的として、リターディング電極への印加電圧の調整とブースティング電極への印加電圧の調整のいずれかを選択的に実行するコンピュータとを有する荷電粒子線装置を提供する。
【発明の効果】
【0011】
本発明によれば、電極に印加する電圧を変化させて試料像の視差を検出するので、磁界特有のヒステリシスやコイル特有のインダクタンスの影響を無くすことができる。これにより、高精度かつ高速に光軸ずれを調整することができ、高分解能像を安定的に得ることができる。
【図面の簡単な説明】
【0012】
【図1】荷電粒子線装置の概略構成例を示す図である。
【図2】電極の印加電圧を変化させて光軸調整を行うための実行画面例を示す図である。
【図3】電極の印加電圧を変化させる自動光軸調整実行時の処理フロー例を示す図である。
【図4】電極に対する印加電圧を自動的に変化させる光軸調整を選択した場合の条件設定画面例を示す図である。
【図5】光軸ずれと光軸調整との関係を説明する図である。
【図6】光軸ずれを検出した場合に表示されるメッセージ例を示す図である。
【図7】電極に対する印加電圧を自動的に変化させる光軸調整を選択した場合の処理フロー例を示す図である。
【図8】電極の印加電圧を変化させる自動光軸調整実行時の他の処理フロー例を示す図である。
【発明を実施するための形態】
【0013】
以下、発明に係る荷電粒子線装置の形態例を図面に基づいて説明する。
(1)形態例1
(1−1)全体構成
図1に、形態例に係る荷電粒子線装置の概略構成図を示す。陰極1と第一陽極2の間には、コンピュータ40で制御する高電圧制御電源20により電圧が印加され、所定のエミッション電流で一次電子線4が陰極1から引き出される。ここで、コンピュータ40は、算術論理ユニット、制御回路、記憶装置、入出力装置で構成され、後述する光軸調整動作は記憶装置43から読み出されるプログラムの一機能として実行される。
【0014】
陰極1と第二陽極3の間には、コンピュータ40で制御する高電圧制御電源20により加速電圧が印加され、陰極1から放出された一次電子線4を加速し後段のレンズ系に進行する。一次電子線4は、第一レンズ制御電源21で制御する第一収束レンズ5で収束され、絞り板8で一次電子線の不要な領域が除去された後に、第二レンズ制御電源22で制御する第二収束レンズ6、対物レンズ制御電源26で制御する対物レンズ7により、試料10に微小スポットとして収束される。対物レンズ7は、インレンズ方式、アウトレンズ方式、及びシュノーケル方式(セミインレンズ方式)など、種々の形態をとることができる。
【0015】
一次電子線4は、偏向制御電源24で制御する走査コイル9で試料10上を二次元的に走査する。一次電子線4の照射で試料10から発生した二次電子等の二次信号12は、対物レンズ近傍に設置したブースティング電極制御電源25で制御するブースティング電極15により引き上げられ、対物レンズ7の上部に進行した後、二次信号分離用直交電磁界(EXB)発生器11により、一次電子と分離されて二次信号検出器13に検出される。二次信号検出器13で検出された信号は、信号増幅器14で増幅された後、記憶装置(内部メモリ)44に転送されて表示装置41に試料像として表示される。
【0016】
走査コイル9の近傍又は同じ位置には、アライナー制御電源23で制御する1段の光軸調整用アライナー19が配置されている。試料10はステージ16にセットされ、ステージ制御電源27からの制御信号によってステージ16が移動することにより、試料上又はステージ上の任意の位置に移動することができる。また、ステージ上には光軸補正を行うための専用パターン17を配置することができる。さらに、ステージ16は、試料上で一次電子線4を減速するためにリターディング電極制御電源28で制御するリターディング電極18を備える。
【0017】
各種制御電源20から28は、コンピュータ40によって制御される電源である。表示装置41には、二次電子等の信号が増幅された試料の拡大像が表示される他、電子光学系の設定や走査条件の設定を行うための種々な操作ボタンや、光軸調整条件の確認や光軸調整の開始を指示するボタンを表示させることができる。
【0018】
他にコンピュータ40には、表示装置41に表示された試料像を画像情報として取得するための画像取得部46と、これら試料像に対して画像処理を行う画像処理部47と、この画像処理の結果から光軸調整用アライナー19の補正量を計算する計算部45と、試料像や計算結果を保存するための記憶装置43と、光軸調整条件などを入力するための入力装置(マウス、キーボード)42と48(つまみ)が接続されている。
【0019】
(1−2)光軸調整画面
図2に、光軸調整を行うための実行画面例を示す。この画面は表示装置41に表示され、オペレータはこの画面を使って実行条件を設定し、光軸調整を開始する。なお、この画面の表示と操作入力の受付は、コンピュータ40で実行されるプログラムを通じて実現される。
【0020】
まず、手動で電極の印加電圧を変化させる光軸調整(手動光軸調整)について説明する。オペレータは光軸調整を行うか否かを判断し、調整を行う場合は表示装置41に実行画面400を起動する。次にオペレータは、印加電圧を変化させる対象として、ブースティング電極403又はリターディング電極404を選択し、手動調整ボタン401を押す。手動調整ボタン401が押されたことをきっかけに、先程選択した電極の印加電圧を周期的に変化させる。この印加電圧の変化の下で、試料10を二次元的に走査し得られた試料像が像表示画面405上に表示される。オペレータは、その試料像のずれの動きが最小になるように、入力装置42(マウスやキーボード)を使ってXスケール407とYスケール408のスライダ位置を変更し、偏向制御電源24に与える制御値を変更することにより光軸調整用アライナー19を調整する。また入力装置48の二つのつまみXとYを回すことで光軸調整用アライナー19を調整し、光軸を調整することも可能である。
【0021】
次に、自動制御によって電極の印加電圧を変化させる光軸調整(自動光軸調整)について説明する。オペレータが自動光軸調整を行う場合は、表示装置41に実行画面400を起動し、印加電圧を変化させる対象として、ブースティング電極403又はリターディング電極404を選択した後、自動調整ボタン402を押す。すると、コンピュータ40は、先程選択した電極を変化対象として光軸調整を開始する。自動光軸調整に関するアライナー補正量の算出方法や処理フローの詳細については後述する。
【0022】
像表示画面405には、光軸調整中の試料像がリアルタイムに表示される。この像表示画面405を目視することにより、オペレータは、光軸調整が適正に行われているか否かを確認することができる。例えば明らかに焦点がずれた状態で光軸調整を行った場合、像表示画面405には焦点のずれた、ぼけた像が表示されるので、オペレータはその状況を見て、自動光軸調整の信頼性を判断することができる。手動又は自動での光軸調整を終了した後、オペレータはボタン406を押して実行画面400を閉じ、光軸調整を終了する。
【0023】
以上のように、この形態例の場合には、電極に印加する電圧を変化させる手動光軸調整又は自動光軸調整を、実行画面400に対するオペレータの操作入力を通じて選択的に実行することができる。これにより、荷電粒子線装置の使用条件に応じた適正な補正動作を選択することが可能になる。なお、形態例の場合には、実行画面400に調整種類の選択用の操作子としてボタンやスケールを表示する場合について説明したが、調整種類の選択方法等はこれらに限らない。
【0024】
(1−3)光軸調整用アライナーの補正量の算出方法
ここでは、自動光軸調整が選択された場合に実行される光軸調整用アライナー19の補正量の算出方法について説明する。光軸調整用アライナー19は、通常、二次元(X、Y)方向に一次電子線を調整できる。アライナーの初期状態(X0、Y0)に対するアライナー偏向量を(X1、Y1)とした時、光軸のずれWi は複素数を用いて表すと次式(1)の関係となる。
【0025】
【数1】
【0026】
ここで、Cは、光軸ずれの初期状態を複素数で表したものである。Dは、電子光学系の動作条件に依存する光軸調整像の移動感度を複素数で表したものである。εは、光軸調整用アライナー19のX方向に対するY方向の相対感度(感度比及び光軸調整用アライナー19の直交ずれを示す。)を複素数で表したものである。光軸調整の目的は、式(1)に示したWi を0にするアライナーの補正量(X1,Y1)を求めることに対応する。従って、式(1)において左辺を0にするためのアライナー補正量(Xopt、Yopt)は式(2)の関係になる。
【0027】
【数2】
【0028】
ここで、ε及びC/Dは未知数であるため、アライナー変化量(X1,Y1)をSだけ変化させた後、電極を2つの条件に変化させることで発生する試料像のずれを画像処理で計測することにより、ε及びC/Dを求めることができる。表1に、アライナーの変化量(X1,Y1)に対する試料像のずれWi の関係を示す。なお、試料像のずれを求める画像処理技術は、種々の方法があり十分既知の技術である。
【0029】
【表1】
【0030】
表1に示した各アライナー変化量に対して、電極を2つの条件に変化させることで検出した試料像のずれ(W1 、W2 、W3 )から、εとC/Dを解くと、それぞれ、式(3)、式(4)に示す関係となる。
【0031】
【数3】
【0032】
【数4】
【0033】
式(3)、(4)で得られた結果を式(2)に代入することにより、光軸調整用アライナー19の補正量(Xopt,Yopt)を求めることができる。また、W3−W1とW2−W1は、光軸調整用アライナー19を一方に調整した時に得られる第1の試料像のずれと、他方に調整した時に得られる第2の試料像のずれであり、本形態例ではこの2つの試料像のずれに基づいて、光軸調整のためのアライナーの感度を検出している。
【0034】
このような手法によれば、電極の印加電圧を変化させて得られる試料像のずれから光軸調整用アライナー19の補正量を算出することが可能になる。
【0035】
(1−4)自動光軸調整の処理フロー
図3に、自動光軸調整の処理フロー例を示す。後述するS1001からS1011までの処理は、コンピュータ40の処理命令に基づいて順番に実行される。
【0036】
(S1001)
光軸調整用アライナー19の現在の設定条件、又は予め決められた条件をアライナー条件1(Bxo, Byo)として光軸調整用アライナー19に設定し、変更対象に選択された電極(ブースティング電極15又はリターディング電極18)の現在値(合焦状態を与える電圧値)に予め決められた値だけフォーカスをずらしたアライナー条件1を設定する。このアライナー条件1と電極条件1において、画像取得部46を使って画像1を取得する。
【0037】
(S1002)
光軸調整用アライナー19の条件をそのままにして、変更対象の電極に予め決められた値だけフォーカスをずらしたアライナー条件2を設定し、アライナー条件1と電極条件2において画像2を取得する。
【0038】
(S1003)
光軸調整用アライナー19に条件2(Bxo +S,Byo)を設定し、その上で、S1001と同様に変更対象の電極を電極条件1に設定し、アライナー条件2と電極条件1において画像3を取得する。
【0039】
(S1004)
光軸調整用アライナー19の条件をそのままにして、S1002と同様に、変更対象の電極を電極条件2に設定し、アライナー条件2と電極条件2において画像4を取得する。
【0040】
(S1005)
光軸調整用アライナー19に条件3(Bxo,Byo+S)を設定し、その上で、S1001と同様に変更対象の電極を電極条件1に設定し、アライナー条件3と電極条件1において画像5を取得する。
【0041】
(S1006)
光軸調整用アライナー19の条件をそのままにして、S1002と同様に変更対象の電極を電極条件2に設定し、アライナー条件3と電極条件2において画像6を取得する。
【0042】
(S1007)
画像1と画像2の視差(試料像のずれ)を画像処理部47により検出し、これを視差1として記憶装置43に記憶する。画像間の視差は、例えば、画像1と画像2の画像を互いに画素単位でずらしながら画像相関を求め、画像相関値が最大になる画像のずらし量から検出することが可能である。その他、視差の検出が可能な画像処理ならば、本形態例に適用することができる。
【0043】
(S1008)
画像3と画像4の視差を画像処理部47により検出して、これを視差2として記憶する。
【0044】
(S1009)
画像5と画像6の視差を画像処理部47により検出して、これを視差3として記憶する。
【0045】
(S1010)
S1007からS1009で求めた視差1、視差2、視差3と前述した式(1)〜(4)とを使い、光軸調整用アライナー19の補正量(Bx1, By1)を計算部45で算出する。
【0046】
(S1011)
S1010で決定した光軸調整用アライナー19の補正量(Bx1, By1)を、アライナー制御電源23を通じて光軸調整用アライナー19に設定する。
【0047】
なお、光軸調整用アライナー19や調整対象に選択した電極の印加電圧を変化させた時に、試料像の移動量が常に一定であることが望ましい。これは、移動量が大きすぎると、試料像が画像領域からはみ出してしまう可能性があり、また、移動量が小さすぎると、画像処理にて試料像が移動していないと判断してしまう可能性があるためである。そこで、試料像の移動量が常に一定になるように、表示倍率に連動して光軸調整用アライナー19やブースティング電極15、リターディング電極18に印加する電圧の制御量を決定すれば、試料像の移動量を一定にすることができる。
【0048】
また、図3に示す処理フローでは、動作の理解が容易な手順で記載したが、画像の取り込み順番は処理に影響を与えない。従って、実際の処理では、処理の高速化を図るために、例えば変更対象の電極を電極条件1に設定して、画像1、画像3、画像5を連続で取り込み、次に変更対象の電極を電極条件2に設定して、画像2、画像4、画像6を連続で取り込むことが可能である。
【0049】
従来は、画像間の視差を検出するために対物レンズを変化させていた。そのため、視差検出におけるヒステリシスやインダクタンスの影響を軽減するため、前述した処理フローにヒステリシス除去や応答待ち時間の処理を入れる必要があった。しかし、本形態例の場合には、視差を電極電位の制御によって検出するため、ヒステリシス除去や応答待ち時間の処理を必要としない。従って、形態例の場合には、対物レンズを駆動制御する場合よりも高精度かつ高速に光軸ずれを調整することが可能になる。
【0050】
(1−5)条件設定画面
ここでは、荷電粒子線装置の自動運転機能において、ブースティング電極15又はリターディング電極18に印加する電圧を変化させて光軸調整を実行する場合に適用する条件の設定方法について説明する。
【0051】
図4に、自動運転機能の実行時に使用する条件設定画面例を示す。この条件設定画面500は、自動運転を実行するためのレシピファイルの1つとして表示装置41に表示される。
【0052】
まず、オペレータは条件設定画面500を起動した後、焦点調整のオン/オフを選択する。通常、自動運転機能において光軸調整を適用する場合、フラグ501をオンにして実行する。所定のパターン位置に移動すると、試料の高さが移動前に合わせた焦点の位置からずれる場合がある。このずれた状態で光軸調整を行うと、焦点の合わない、ぼけたパターンから試料像のずれを検出することになるので、光軸調整精度が悪くなる。そのため、焦点調整を行った後に試料像のずれを検出することで、この問題を解消する。
【0053】
次に、光軸調整に用いる試料パターンフラグ502又は調整専用パターンフラグ503を選択する。フラグ502又は503を選択することで、ステージ上の試料10又は調整用パターン17の何れを用いるかを決定する。試料パターンフラグ502を選択した場合、併せてパターンのステージ座標、試料像取得倍率、試料像を取得する際のフレーム数を、それぞれ数値入力ウィンドウ504、505、506から入力する。調整専用パターンフラグ503を選択した場合は、予め記憶装置43に保存してあるステージ座標、倍率、フレーム数がそれぞれの数値入力ウィンドウに設定される。なお、ここで設定されるフレーム数とは、パターンの像を形成するための走査像の積算回数である。
【0054】
次に、光軸調整のオン/オフを選択する。光軸調整フラグ507がオンならば、光軸調整を実施する。フラグ507がオフならば光軸調整を行わないため、光軸ずれが起きないような環境で選択することが望ましい。
【0055】
光軸調整フラグ507がオンの場合に、光軸の調整方法として手動調整フラグ508又は自動調整フラグ509のいずれかを選択することができる。手動調整フラグ508とは、前述した実行画面400を使用し、実行画面上のスケールや入力装置であるつまみ等でブースティング電極15又はリターディング電極18の印加電圧を調整する光軸調整モードである。自動調整フラグ509とは、図3で説明した処理フローに従い、ブースティング電極15又はリターディング電極18の印加電圧を変化させて試料像のずれを検出し、光軸調整用アライナー19の補正量を算出することで光軸調整を行うモードである。この自動光軸調整は全自動で補正を実行するので、オペレータによる調整精度や調整時間のバラツキがなくなり、安定した光軸調整が可能となる。
【0056】
また、光軸の調整時に印加電圧を変化させる電極の選択は、ブースティング電極フラグ510又はリターディング電極フラグ511の選択により行う。ブースティング電極フラグ510を選択すると、ブースティング電極15に印加する電圧の制御による光軸調整が実行され、リターディング電極フラグ511を選択すると、リターディング電極18に印加する電圧の制御による光軸調整が実行される。
【0057】
次に、オペレータは、自動運転実行時における光軸調整のタイミングを選択する。例えば光軸ずれの頻度が高いような場合は、光軸調整精度を考慮して分析点毎512を設定し、分析点毎に光軸調整を行う。光軸ずれがあまり発生しないようであれば、スループットを考慮して試料交換毎513を選択し、荷電粒子線装置で使用する試料を交換する度に光軸調整を行うと良い。このような選択肢を設けることで、荷電粒子線装置の使用条件や環境等に基づいて、適正な光軸調整タイミングを選択することが可能になる。
【0058】
また、所定値を超えた時514を選択すると、分析点毎又は試料交換毎に、電極の電圧変化量ΔVに対する視差ΔWiを検出し、視差ΔWiの記録を開始する。この視差ΔWiの大きさは、ビームが光軸からどれだけずれているかを表すものであり、この値を記録して比較することで、光軸ずれの程度を判断することが可能となる。図5に示すように、この視差ΔWiが予め決められた光軸ずれの許容範囲(破線で囲んで示す。)を越えた場合、自動的に光軸調整が実行される。またΔWiが光軸ずれの許容範囲を越えた場合には、光軸調整が必要である旨を通知する図6に例示するようなメッセージ601又は602を表示し、オペレータに光軸調整の判断を任せても良い。この他、ユーザー設定515を選択し、予め別途登録されたタイミングで光軸調整を実行させることもできる。
【0059】
以上のように、レシピファイルの一つとして、条件設定画面により光軸調整に関する条件を選択できるようにしておけば、自動運転時にも、電極を用いた光軸調整を適用することができる。
【0060】
なお、本形態例では、自動運転機能の条件設定画面を説明するためにフラグを用いたが、フラグの表記や調整種類の選択方法の表現はこれに限るものではない。
【0061】
(1−6)自動運転実行時の処理フロー
図7に、自動運転を実行した場合の処理フローを示す。後述するS2001からS2009までの処理は、オペレータが条件設定画面500を通じて各種の条件を設定した後に、コンピュータ40の処理命令に基づいて自動的に開始される。
【0062】
(S2001)
まず、予め記憶装置43に登録されているパターン情報を読み出し、倍率等の光学条件から光軸調整に必要なパラメータであるアライナー変化量(S)や電極の変化量を決定する。
【0063】
(S2002)
パターン情報からステージ座標を取り出し、パターン位置へ移動する。条件設定画面500において調整専用パターンフラグ503が選択されている場合は、調整用パターン17が一次電子線の直下に位置付けられるようにステージを移動する。この移動の際に数値入力ウィンドウ505に入力された倍率に従って、偏向制御電源24から走査コイル9に供給される電流値が設定される。
【0064】
(S2003)
前記条件設定画面の焦点調整フラグ501のオン/オフを判定し、オンの場合は焦点調整を実行する。
【0065】
(S2004)
数値入力ウィンドウ506に入力されているフレーム数分の画像を積算して試料像を形成する。
【0066】
(S2005)
光軸調整フラグ507がオンの場合、調整方法として手動調整フラグ508が選択されているか自動調整フラグ509が選択されているかを判定する。
【0067】
(S2006)
手動調整フラグ508がオンの場合、光軸調整タイミングで設定したタイミングに、前述した実行画面400が起動される。像表示画面405には、オペレータが選択した電極の印加電圧が周期的に変化している試料像が連続的に表示され、その像の動きを最小とするように、スケールもしくはつまみを使って光軸調整用アライナー19を調整する。
【0068】
(S2007)
一方、自動調整フラグ509がオンであった場合、オペレータが選択した電極が判定される。すなわち、ブースティング電極フラグ510が選択されているか、リターディング電極フラグ511が選択されているかが判定される。
【0069】
(S2008)
リターディング電極フラグ511が選択されていた場合、リターディング電極18の印加電圧を変化させて試料像のずれを検出した後、アライナーへの補正量を算出し、光軸調整用アライナー19に設定する。
【0070】
(S2009)
ブースティング電極フラグ510が選択されていた場合、ブ―スティング電極15の印加電圧を変化させて試料像のずれを検出した後、アライナーへの補正量を算出し、光軸調整用アライナー19に設定する。
【0071】
なお、本形態例では、条件設定画面500のブースティング電極フラグ510又はリターディング電極フラグ511によって、ブースティング電極15とリターディング電極18をオペレータが選択しているが、状況によってはコンピュータ40の制御によってこれらの選択を実行しても良い。
【0072】
以上のように、自動運転機能においても、電極に印加する電圧を変化させる光軸調整を適用することで、磁界特有のヒステリシスやコイル特有のインダクタンスによる視差検出誤差や軽減処理がなくなり、高精度かつ高速に光軸調整を行うことが可能になる。
【0073】
(2)他の形態例
前述した形態例の場合には、自動光軸調整の処理フローにおいて、試料像のずれを検出するために、フォーカスを合焦状態からずらす2つの電極条件に変化させ、その条件で取得した画像を比較した。しかしながら、フォーカスの合焦状態を与える電極条件とフォーカスをずらす電極条件で取得される画像を比較しても光軸調整が可能である。図8に、フォーカスをずらす前の電極条件とフォーカスをずらす電極条件を使用した自動光軸調整の処理フローを示す。なお、後述するS3001からS3011までの処理は、コンピュータ40の処理命令に基づいて順番に実行される。
【0074】
(S3001)
光軸調整用アライナー19の現在の設定条件、又は予め決められた条件をアライナー条件1(Bxo, Byo)として光軸調整用アライナー19に設定し、画像取得部46を使って画像1を取得する。この時、変更対象の電極(ブースティング電極15又はリターディング電極18)の現在値(合焦状態を与える電圧値)をアライメント条件1として記憶する。
【0075】
(S3002)
光軸調整用アライナー19の条件をそのままにして、変更対象の電極の現在値(合焦状態を与える電圧値)に予め決められた値だけフォーカスをずらすアライメント条件2を設定する。このアライナー条件1と電極条件2において画像2を取得する。
【0076】
(S3003)
光軸調整用アライナー19にアライナー条件2(Bxo +S,Byo)を設定して、S3001で記憶した電極条件1に戻し、アライナー条件2と電極条件1において画像3を取得する。
【0077】
(S3004)
光軸調整用アライナー19の条件をそのままにして、S3002と同様に、変更対象の電極を電極条件2に設定し、アライナー条件2と電極条件2において画像4を取得する。
【0078】
(S3005)
光軸調整用アライナー19に条件3(Bxo,Byo+S)を設定して、S3001で記憶した電極条件1に戻し、アライナー条件3と電極条件1において画像5を取得する。
【0079】
(S3006)
光軸調整用アライナー19の条件をそのままにして、S3002と同様に、変更対象の電極を電極条件2に設定し、アライナー条件3と電極条件2において画像6を取得する。
【0080】
(S3007)
画像1と画像2の視差(試料像のずれ)を画像処理部47により検出し、これを視差1として記憶装置43に記憶する。
【0081】
(S3008)
画像3と画像4の視差を画像処理部47により検出して、これを視差2として記憶する。
【0082】
(S3009)
画像5と画像6の視差を画像処理部47により検出して、これを視差3として記憶する。
【0083】
(S3010)
S3007からS3009で求めた視差1、視差2、視差3と前述した式(1)〜(4)とを使い、光軸調整用アライナー19の補正量(Bx1, By1)を計算部45で算出する。
【0084】
(S3011)
S3010で決定したアライナー補正量(Bx1, By1)を、アライナー制御電源23を通じて光軸調整用アライナー19に設定する。
【0085】
なお、図8に示す処理フローでは、動作の理解が容易な手順で記載したが、画像の取り込み順番は処理に影響を与えない。従って、実際の処理では、処理の高速化を図るために、例えばフォーカスが合焦状態にある電極条件で、画像1、画像3、画像5を連続で取り込み、次にフォーカスをずらす電極条件にして、画像2、画像4、画像6を連続で取り込むことが可能である。また、この際、フォーカスをずらす電極条件には、フォーカスが合焦状態にある電極条件に対して印加電圧が高い場合と低い場合の2種類が考えられる。これらは、適用する荷電粒子線装置の特性に応じて選択的に用いれば良い。
【符号の説明】
【0086】
1:陰極
2:第一陽極
3:第二陽極
4:一次電子線
5:第一収束レンズ
6:第二収束レンズ
7:対物レンズ
8:絞り板
9:走査コイル
10:試料
11:二次信号分離用直交電磁界(EXB)発生器
12:二次信号
13:二次信号用検出器
14:信号増幅器
15:ブースティング電極
16:ステージ
17:光軸調整用パターン
18:リターディング電極
19:光軸調整用アライナー
20:高圧制御電源
21:第一収束レンズ制御電源
22:第二収束レンズ制御電源
23:アライナー制御電源
24:偏向制御電源
25:ブースティング電極制御電源
26:対物レンズ制御電源
27:ステージ制御電源
28:リターディング電極制御電源
40:コンピュータ
41:表示装置
42:入力装置(マウス・キーボード)
43:記憶装置
44:記憶装置(内部メモリー)
45:計算部
46:画像取得部
47:画像処理部
48:入力装置(調整用つまみ)
【特許請求の範囲】
【請求項1】
試料に荷電粒子線を照射し、該試料から発生する二次信号から画像を生成する荷電粒子線装置において、
前記荷電粒子線を前記試料へ集束させる電磁界重畳レンズと、
前記荷電粒子線を前記試料に対して減速させるリターディング電極と、
前記試料から発生する前記二次信号を検出器へ引上げるブースティング電極と、
前記荷電粒子線の光軸調整を、前記リターディング電極に印加する電圧の可変制御による調整と前記ブースティング電極に印加する電圧の可変制御による調整のいずれかを選択的に実行するコンピュータと
を有する荷電粒子線装置。
【請求項2】
前記コンピュータに対し、前記リターディング電極に印加する電圧の可変制御による光軸の調整と前記ブースティング電極に印加する電圧の可変制御による光軸の調整のいずれかを選択的に指示する入力装置を有する請求項1に記載の荷電粒子線装置。
【請求項3】
前記コンピュータは、前記リターディング電極に印加する電圧の可変制御による光軸の調整、又は前記ブースティング電極に印加する電圧の可変制御による光軸の調整が選択された場合、前記画像に表示された前記試料の像の移動量に応じ、該試料の表示倍率及び制御対象とする電極に印加する電圧の可変制御量の調整を実行する請求項1に記載の荷電粒子線装置。
【請求項4】
前記コンピュータは、前記リターディング電極に印加する電圧の可変制御による光軸の調整、又は前記ブースティング電極に印加する電圧の可変制御による光軸の調整が選択された場合、前記画像に表示された前記試料の像の移動量を記憶装置へ記憶させ、該記憶装置に記憶された前記像の移動量が予め設定された基準移動量に達した場合に、前記光軸調整の必要性を示すメッセージを表示装置へ表示させる請求項1に記載の荷電粒子線装置。
【請求項1】
試料に荷電粒子線を照射し、該試料から発生する二次信号から画像を生成する荷電粒子線装置において、
前記荷電粒子線を前記試料へ集束させる電磁界重畳レンズと、
前記荷電粒子線を前記試料に対して減速させるリターディング電極と、
前記試料から発生する前記二次信号を検出器へ引上げるブースティング電極と、
前記荷電粒子線の光軸調整を、前記リターディング電極に印加する電圧の可変制御による調整と前記ブースティング電極に印加する電圧の可変制御による調整のいずれかを選択的に実行するコンピュータと
を有する荷電粒子線装置。
【請求項2】
前記コンピュータに対し、前記リターディング電極に印加する電圧の可変制御による光軸の調整と前記ブースティング電極に印加する電圧の可変制御による光軸の調整のいずれかを選択的に指示する入力装置を有する請求項1に記載の荷電粒子線装置。
【請求項3】
前記コンピュータは、前記リターディング電極に印加する電圧の可変制御による光軸の調整、又は前記ブースティング電極に印加する電圧の可変制御による光軸の調整が選択された場合、前記画像に表示された前記試料の像の移動量に応じ、該試料の表示倍率及び制御対象とする電極に印加する電圧の可変制御量の調整を実行する請求項1に記載の荷電粒子線装置。
【請求項4】
前記コンピュータは、前記リターディング電極に印加する電圧の可変制御による光軸の調整、又は前記ブースティング電極に印加する電圧の可変制御による光軸の調整が選択された場合、前記画像に表示された前記試料の像の移動量を記憶装置へ記憶させ、該記憶装置に記憶された前記像の移動量が予め設定された基準移動量に達した場合に、前記光軸調整の必要性を示すメッセージを表示装置へ表示させる請求項1に記載の荷電粒子線装置。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2010−218912(P2010−218912A)
【公開日】平成22年9月30日(2010.9.30)
【国際特許分類】
【出願番号】特願2009−64942(P2009−64942)
【出願日】平成21年3月17日(2009.3.17)
【出願人】(501387839)株式会社日立ハイテクノロジーズ (4,325)
【Fターム(参考)】
【公開日】平成22年9月30日(2010.9.30)
【国際特許分類】
【出願日】平成21年3月17日(2009.3.17)
【出願人】(501387839)株式会社日立ハイテクノロジーズ (4,325)
【Fターム(参考)】
[ Back to top ]