
荷電粒子線装置
【課題】荷電粒子線装置において、収差の測定と補正は自動化されていたが、複数の収差を一度に補正することに関して、どのような補正を行うべきかの判断は自動化されていなかった。
【解決手段】荷電粒子線源と、前記荷電粒子線源から放出された荷電粒子を荷電粒子線として試料に対して照射する荷電粒子光学系と、前記荷電粒子光学系の収差を補正する収差補正器と、前記荷電粒子光学系と前記収差補正器の各構成要素を制御する制御手段とを備えた荷電粒子線装置において、最適な調整手順を学習により獲得する自動収差補正装置を備える。自動収差補正装置は、収差補正を複数同時に実施可能な、最適な調整手順を強化学習により獲得する。
【解決手段】荷電粒子線源と、前記荷電粒子線源から放出された荷電粒子を荷電粒子線として試料に対して照射する荷電粒子光学系と、前記荷電粒子光学系の収差を補正する収差補正器と、前記荷電粒子光学系と前記収差補正器の各構成要素を制御する制御手段とを備えた荷電粒子線装置において、最適な調整手順を学習により獲得する自動収差補正装置を備える。自動収差補正装置は、収差補正を複数同時に実施可能な、最適な調整手順を強化学習により獲得する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、荷電粒子線装置に係り、特に、自動球面収差補正装置を備えた荷電粒子線装置に関する。
【背景技術】
【0002】
近年の透過型電子顕微鏡(TEM)や走査型透過電子顕微鏡(STEM)等の荷電粒子線装置には、球面収差補正装置(以下、収差補正器)を備えたものがある。この収差補正器は、TEMやSTEMにおいて分解能を制限する主な要因である対物レンズの球面収差(Cs)を補正するために用いられる。収差補正器としては、6極子場を発生させる2つの多極子レンズと、その間に2枚の軸対称レンズ(伝達レンズ)を配置したものが知られている(例えば特許文献1参照)。
【0003】
収差補正器により対物レンズのCsは補正される。しかし、収差補正器の不完全性、すなわち、多極子レンズを構成する個々の極子の位置ずれや、極子材料の磁気的特性のばらつきなどにより、寄生収差と呼ばれる余分な収差が発生してしまう。発生する3次以下の寄生収差は、2回対称1次非点収差(A1)、1回対称2次コマ収差(B2)、3回対称2次非点収差(A2)、2回対称3次スター収差(S3)、4回対称3次非点収差(A3)である。収差補正器の調整においては、Csの補正に加え、これら寄生収差の補正が必須となる。
【0004】
製品の収差補正器にはCsと寄生収差を補正するためのアライメント・ツールが付属しており、調整者はアライメント・ツールを用いることで半自動的に収差補正器の調整を行うことが出来る(例えば非特許文献1参照)。アライメント・ツールのGUI(グラフィカル・ユーザー・インターフェース)上には、収差測定ボタンと、複数ある収差のそれぞれに対応した収差補正ボタンが配置されている。収差測定ボタンを押すことで、複数枚取得された電子顕微鏡像から光学系に残存する各収差の大きさを表す収差係数が測定される(収差測定の方法に関しては例えば特許文献2参照)。収差補正ボタンを押すことで、測定された収差係数に応じて収差補正器にフィードバックがかかり、指定した収差が補正される(収差補正の方法に関しては例えば特許文献3、特許文献4参照)。
【0005】
アライメント・ツールを用いることで収差の測定と補正については自動で行われるが、収差測定の結果に基づいてどの収差を優先的に補正すべきかの判断は、調整者に委ねられている。通常、調整者は収差係数が最も大きい収差から優先的に補正していき、3次以下の収差が全て許容値以下となるまで補正を繰り返す。
【0006】
光ディスク装置の分野においては、収差を補正するための最適な制御量を学習する(探索により見つけた最適な状態を記録する)方法が開示されている(特許文献5参照)。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特表2002−510431号公報
【特許文献2】特開2007−180013号公報
【特許文献3】特開2007−266008号公報
【特許文献4】特開2006−114304号公報
【特許文献5】特開2010−218591号公報
【非特許文献】
【0008】
【非特許文献1】P. Hawkes,“Advances in IMAGING and ELECTRON PHYSICS Vol.153 Aberration-corrected Electron microscopy”, Academic Press,p.63 (2008)
【発明の概要】
【発明が解決しようとする課題】
【0009】
上述したように、アライメント・ツールを用いることで収差補正器の調整は半自動的に行われるが、調整に要する時間は補正する収差の判断によって変わってくる。
【0010】
ここで難しいのが、どの収差を補正するかの判断である。収差測定で得られる収差係数には誤差が避けられず、相対的に小さい収差ほど測定誤差が大きくなる傾向がある。例えば、ある一つの収差が支配的に大きい場合、他の小さな収差の測定誤差は大きくなり、測定誤差の大きな収差係数に基づいて補正を行うと収差が増えてしまうことがある。また、収差補正は互いに独立しているものもあるが干渉しあうものもあり、一方を補正すると他方が増えることがある。特に、3次収差の補正は2次以下の収差を増やす傾向がある。
【0011】
そのため、従来技術においては、収差係数が最大のものを1つだけ選んで優先的に補正するといった比較的簡単な規則に基づいた自動調整しか実現されていない(例えば特許文献4参照)。
【0012】
また、特許文献5に記載の技術の荷電粒子線装置への適用は困難である。何故なら、電磁レンズにヒステリシス特性があるため、装置の電源を落とすなどして電磁レンズの状態を大きく変化させた後に電磁レンズの状態を以前の最適な状態に復帰させても、元の最適な状態には戻らないからである。
【0013】
荷電粒子線装置において、収差係数が最も大きい収差だけでなく、2番目、3番目に大きい収差も一度に補正してしまえば、収差測定の回数が減ると考えられる。一般に、収差測定では1回の収差測定に対して複数の電子顕微鏡像を取得する必要があるために、1分前後の時間がかかる。しかし、収差補正のための収差補正器へのフィードバックでは1秒以下程度の時間しかかからない。そのため、1回の収差測定に対して同時に複数の収差を補正することができれば収差測定の回数を減らせるので、調整時間短縮の効果は大きいと考えられる。
【0014】
熟練した調整者は、各収差係数の大きさの割合や、どの収差係数が支配的なのかを考慮しながら、経験によって複数の収差を一度に補正する判断を下せる。こうした経験をあらかじめプログラム化しておけば、調整時間が短くなるような補正の判断を自動的に行うアライメント・ツールが実現できると考えられる。しかし、収差係数の大きさと種類の無数の組み合わせに対して最適な補正の判断をあらかじめ記述しておくのは現実的ではない。特に、荷電粒子線装置は、仕様が異なる場合のみならず仕様が同じ場合でもそれぞれ固有の因子、例えば、製作誤差に起因する極子のずれや磁気的特性のばらつき等の個体差や装置の設置環境の差等(以下、個体差)があり、これらの個体差を全て反映した荷電粒子線装置毎の、最適な補正の判断を自動的に行うことは実用化されていない。
【0015】
このように、従来技術において、収差の測定と補正は自動化されていたが、収差測定の回数を減らし調整時間を短くすることに関して、どのような補正を行うべきかの判断は自動化されていなかった。
【0016】
本発明の目的は、複数の収差に対する補正の判断を自動的に行うための最適な調整手順を学習により獲得し、調整時間をより短くすることのできる、自動収差補正装置を提供することである。
【課題を解決するための手段】
【0017】
上記課題を解決するために、本発明では、荷電粒子線源と、前記荷電粒子線源から放出された荷電粒子を荷電粒子線として試料に対して照射する荷電粒子光学系と、前記荷電粒子光学系の収差を補正する収差補正器と、前記荷電粒子光学系と前記収差補正器の各構成要素を制御する制御手段とを備えた荷電粒子線装置において、自律的に最適な調整手順を学習により獲得する自動収差補正装置を備えることを特徴とする。
【発明の効果】
【0018】
本発明によれば、各収差測定に対して過去の調整で効果のあった収差補正を複数同時に実施するので、調整時間の短い自動収差補正が可能となる。
【図面の簡単な説明】
【0019】
【図1】本発明の第一の実施形態における、荷電粒子線装置のシステムの構成例を示す図である。
【図2】第一の実施形態において、学習機能を実現している一括補正対象判断・評価手段と価値関数テーブルの相互作用を示す図である。
【図3】価値関数テーブルの構造例を示す図である。
【図4】第一の実施形態における、学習機能付き自動収差補正プロセスのフローチャートである。
【図5】状態関数による収差状態の数値化手順を示すフローチャートである。
【図6】補正目標値の例を示す図である。
【図7】状態関数における判定基準の例を示す図である。
【図8】価値関数テーブルの収差状態s128の更新前、更新後の例を示す図である。
【図9】政策関数による補正する収差の選択手順を示したフローチャートである。
【図10】乱数による収差選択の概念を示した図である。
【図11】報酬関数による補正結果の評価手順を示したフローチャートである。
【図12】Q学習による価値関数テーブルの更新手順を示したフローチャートである。
【図13】第一の実施形態における、自動収差補正GUIの画面を示した図である。
【図14】学習情報GUIの画面を示した図である。
【図15】本発明の第二の実施形態における、収差係数のばらつきを考慮した収差補正の手順を示すフローチャートである。
【図16】本発明の第三の実施形態における、ヒストリーGUIの画面を示した図である。
【図17】第三の実施形態における、補正のアンドゥ機能を実現するための構成図である。
【図18A】本発明の第四の実施形態における、一括補正対象判断・評価手段と価値関数テーブルの相互作用を示す図である。
【図18B】第四の実施形態における、教示GUIの画面を示した図である。
【発明を実施するための形態】
【0020】
本発明の荷電粒子線装置は、荷電粒子線源と、前記荷電粒子線源から放出された荷電粒子を荷電粒子線として試料に対して照射する荷電粒子光学系と、前記荷電粒子光学系の収差を補正する収差補正器と、前記荷電粒子光学系と前記収差補正器の各構成要素を制御する制御手段とを有するものにおいて、学習により複数の収差に対する最適な調整手順を獲得する自動収差補正装置を備えている。
本発明の代表的な実施形態では、収差係数の組み合わせ毎に各収差を補正したときに期待される効果(価値)を記述したテーブル(価値関数テーブル)を用意する。価値関数テーブルは、ある収差状態に対してどの収差を優先的に補正すべきかを数値化した表である。そして、価値関数テーブルに基づいて計算された収差補正の選択確率に従って一度に複数の収差の補正を試みる。すなわち、自動収差補正装置は、複数の収差を対象に一括して補正を行い、一括して評価することが可能である。ただし、測定された収差状態によっては、一度に1つの収差を対象とすることも当然有りうる。各補正の効果は報酬として各々定量化され、強化学習法により価値関数テーブルが更新される。報酬の大きい(補正の結果、収差が大きく減少した)補正ほど価値が高くなり、次回の補正における選択確率が上昇する。逆に、負の報酬をもたらした(補正の結果、収差が増えた)補正の価値は下がり、選択確率は下降する。このように、複数収差の同時補正の試みと、それらの補正効果の評価を、各収差が(目標の分解能が得られる)目標値以下の値となるまで繰り返す。調整を繰り返すほど価値関数テーブルは最適化されていき、過去の調整経験を活かした収差補正の判断が下せるようになる。換言すると、強化学習の結果得られた価値関数テーブルは、ある収差状態における各収差の最適な調整手順を数値として与える表である。
【0021】
各収差測定に対して過去の調整で効果のあった収差補正を複数同時に実施するので、調整時間の短い自動収差補正が可能となる。
また、自動収差補正装置が自律的に最適な調整手順を学習により獲得するので、ユーザは熟練した調整者でなくても適切な収差補正を行うことができる。
このように、収差補正を複数同時に実施可能な最適な調整手順を、強化学習により獲得することで、個々の荷電粒子線装置固有の状況を反映した、調整時間の短い自動収差補正が可能となる。
以下、本発明の実施の形態について、図面に基づき詳細に説明する。
【実施例1】
【0022】
本発明の第一の実施形態になる荷電粒子線装置の例を、図1〜図13を参照しながら説明する。
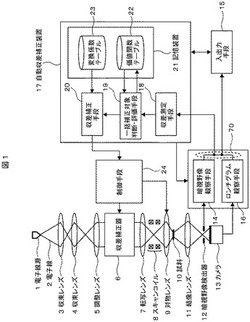
図1は、第一の実施形態における荷電粒子線装置の全体的なシステムの構成例を示す図である。図1では、荷電粒子線装置として走査型透過電子顕微鏡(STEM)を例にとって説明する。荷電粒子線装置は、電子線源1(荷電粒子線源)と、この荷電粒子線源から放出された荷電粒子を荷電粒子線として試料10に対して照射する荷電粒子光学系と、荷電粒子光学系の収差を補正する収差補正器6と、荷電粒子光学系と収差補正器の各構成要素を制御する制御手段24と、自動収差補正装置17とを備えている。
【0023】
電子線源1から放出された電子線2は、収束レンズ3、4の作用を受けて調整レンズ5の物面に焦点を結び、調整レンズ5の作用により収差補正器6に平行入射する。
【0024】
収差補正器6では電子線2の各収差が補正され、転写レンズ7の作用により対物レンズ9の上方に焦点を結ぶ。収差補正器6は、例えば、多段の6極子レンズと伝達レンズとを備え、Cs,A1,B2,A2,C3,S3,A3の各収差が自動的に補正される。
【0025】
収差が補正された電子線2は、対物レンズ9により収束されて、試料10上に微小なプローブを形成する。該プローブで試料10上をスキャンコイル8により走査し、試料10から出てくる散乱波を暗視野像検出器12で受け、該散乱波の強度を暗視野像観察手段14によりプローブ走査と同期させて入出力手段15の画像表示部に輝点列として表示することで、試料10の暗視野像を得る。ロンチグラムを観察する際には、スキャンコイル8による電子線の走査を止め、試料10から出てくる透過・散乱波をカメラ13で受け、該透過・散乱波の強度の2次元的な分布を、ロンチグラム観察手段16により入出力手段15の画像表示手段部に輝点列として表示する。結像レンズ11は、暗視野像検出器12とカメラ13に入射する電子線の拡がりを調整する。暗視野像観察手段14とロンチグラム観察手段16は、入出力手段15及び自動収差補正装置17と相互に接続されている。自動収差補正装置17の測定方法に基づき、切替え機能70により、暗視野像観察手段14とロンチグラム観察手段16のいずれかの出力が選択される(図2参照)。また、入出力手段15には、必要に応じて、GUI機能を有する複数の画面を備えた画面表示部を設け、各画面上のボタンや画像などを選択する事で、ユーザが荷電粒子線装置に対して各種の入力操作を行なったり出力情報を取得したりするようにしても良い。
【0026】
自動収差補正装置17は、収差測定手段18、一括補正対象判断・評価手段19、収差補正手段20で構成される。収差測定手段18は、暗視野像観察手段14から出力される暗視野像、もしくはロンチグラム観察手段16から出力されるロンチグラムを用いて、収差係数を測定する。一括補正対象判断・評価手段19は、収差測定手段18で測定された収差係数と、記憶装置21に保存された価値関数テーブル22を元に補正する収差を一括して複数あるいは1つ選択し、収差補正手段20に補正の指示を出す。収差補正手段20は一括補正を指示された各収差係数について、記憶装置21に保存された変換係数テーブル23を参照することで各収差係数から補正に必要な電流、電圧等の各制御量を算出し(変換係数テーブルはあらかじめ較正しておく)、制御手段24に各制御信号を出力する。該各制御信号に基づいて制御手段24が収差補正器6と対物レンズ9にフィードバックをかけることで、各収差が補正される。一括補正対象判断・評価手段19で、収差補正の効果が評価され、この学習結果が価値関数テーブル22に反映される。なお、自動収差補正装置17は、例えば、コンピュータに上記収差測定手段、一括補正対象判断・評価手段、及び収差補正手段の各機能を実現させるプログラムにより、実現される。
【0027】
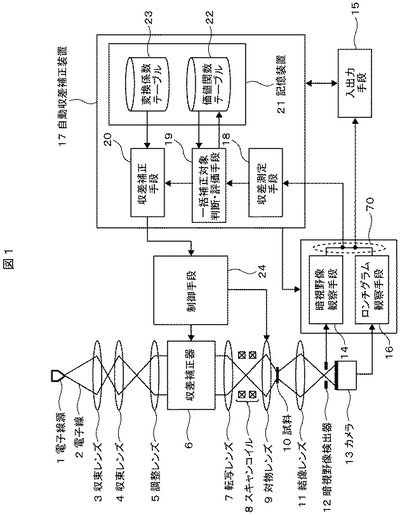
本発明における自動収差補正装置17は、収差補正を複数同時に実施し、学習する機能を有している。この自動収差補正の学習機能は、主に、一括補正対象判断・評価手段19と価値関数テーブル22により実現される。一括補正対象判断・評価手段19は、複数の収差を対象に、一括して補正を行い、一括して評価することができる。この一括補正対象判断・評価手段19は、収差補正選択器25と、収差補正評価器26とを有している(図2参照)。収差補正選択器25は、一括補正する複数あるいは1つの収差を選択して収差補正手段20に補正の指示を出す。収差補正評価器26において、補正後の収差補正の効果は報酬として各々定量化され、この報酬に基づいて価値関数テーブル22が更新される。このような自律的な学習を、複数収差を対象に一括して行うことができる。この価値関数テーブル22に基づく調整手順を利用することで、荷電粒子線装置の個体差を反映した、調整時間の短い自動収差補正が可能となる。
図2は、一括補正対象判断・評価手段19と価値関数テーブル22の相互作用をある時点における補正の前後に分けて示したもので、補正前を試行フェーズ、補正後を評価フェーズと呼ぶ。試行フェーズ(図2(a))では、収差測定手段18で測定された補正前の各収差係数と価値関数テーブル22を元に、収差補正選択器25が一括補正する収差を複数選択し、収差補正手段20に一括補正の指示を出す。ここで、収差補正選択器25は、選択した各収差の種類とそれらの収差係数を保持しておく。評価フェーズ(図2(b))では、収差測定手段18で測定された一括補正後の各収差係数、及び収差補正選択器25が保持しておいた選択された各収差の種類とそれらの収差係数を元に、収差補正評価器26が一括補正の効果を評価して価値関数テーブル22を更新する。これら試行フェーズと評価フェーズを繰り返すことで価値関数テーブル22が最適化されていき、一括補正対象判断・評価手段19の判断精度が向上していく。
【0028】
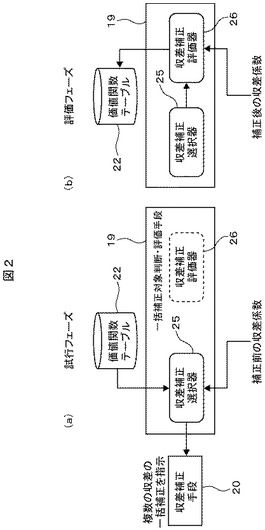
ここで、価値関数テーブル22の詳細について説明する。図3は、価値関数テーブル22の構造を示す図である。価値関数テーブルとは、ある収差状態に対してどの収差を優先的に補正すべきかを数値化した表である。価値関数テーブル22は、各収差係数を各々の補正目標値で規格化した値をN段階に階級化し、該階級化された値を並べてできるN進数の数値を10進数に変換することで得られる数値を収差状態とし、この収差状態を行インデックスしたものである。なお、Nは、4〜8程度とするのが望ましい。図3の例では、6つの収差係数(A1,B2,A2,C3,S3,A3)を各々の補正目標値で規格化した値を5段階に階級化した、56に対応する15625行の収差状態s1〜s15625が記述されている。
【0029】
価値関数テーブル22の更新(学習)は、図2(b)で説明した評価フェーズにおいて計算される、ある収差状態sから特定の補正aをおこなったときの効果を定量化した報酬r(s,a)を元に行われる。価値関数テーブル22は収差係数の組み合わせを数値化した収差状態sを行インデックスとしていて、第si行目には収差状態siにおいてA1,B2,A2,C3,S3,A3を補正することで得られる報酬の推定値(価値Qと呼ぶ)QA1-i,QB2-i,QA2-i,QC3-i,QS3-i,QA3-iが記述してある。
【0030】
価値関数テーブル22の初期値は、報酬の真値に近いと考えられるものを設定しておくか、全くランダムな値を設定するかの二通りが考えられる。前者は熟練者の経験を価値関数テーブルの初期値としてそれを学習により改善していく方法で、後者は経験がまったく無い場合に試行錯誤によって価値関数テーブルを最適化していく方法である。前者における価値関数テーブルの初期値の決め方として、ある収差状態においては相対的に大きい収差ほど誤差の少ない補正が行われるはずなので価値を高く設定しておき、異なる収差状態の間では各収差係数の総和が小さい状態で行われる補正ほど目標とする補正状態に到達する可能性が大きいために高い価値を持つように設定する方法が考えられる。
【0031】
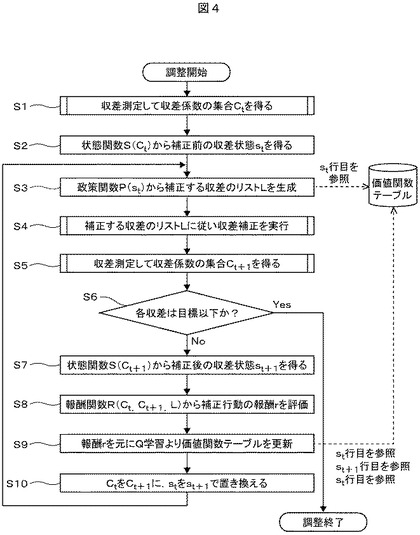
以下、図4に示すフローチャートに基づき、本発明における学習機能付き自動収差補正プロセス(以下、自動補正プロセス)について説明する。自動補正プロセスは、図2(a)で説明した試行フェーズ(図4のS1〜S4)と図2(b)で説明した評価フェーズ(図4のS5〜S9)に大別される。試行フェーズでは、収差測定手段18により現在の収差係数を測定し(S1)、状態関数により収差係数から収差状態を特定し(S2)、政策関数(Policy Function)により価値関数テーブル22に基づいて補正する収差を確率的に複数選択し(S3)、収差補正手段20により選択された収差を補正する(S4)。評価フェーズでは、収差測定手段18により補正後の収差係数を測定し(S5)、補正後の収差状態を特定し(S7)、報酬関数により補正の効果を報酬として定量化する(S8)。そして、報酬を元にQ学習により価値関数テーブルを更新することで学習結果を価値関数テーブル22に反映させる(S9)。評価フェーズの途中では各収差が補正目標値以下であるかどうかがチェックされ(S6)、Yesであれば収差補正のシーケンス、すなわち、収差の調整が終了する。各収差が目標値以下となるまで調整を繰り返すことにより、荷電粒子線装置固有の最適化された価値関数テーブルが得られる。一方、チェック結果がNoであれば補正前の収差係数と収差状態を、補正後の収差係数と収差状態にそれぞれ置き換えて(S10)、1回の収差補正のシーケンスを終えた後、試行フェーズS3に戻り、次のシーケンスで同様の処理を繰り返す。
【0032】
ここで、図2との関連を説明すると、図4のS2とS3は図2の収差補正選択器25で実行され、図4のS6〜S9は図2の収差補正評価器26で実行される。
【0033】
以下、上述した状態関数、政策関数、報酬関数、Q学習について詳細を説明する。
【0034】
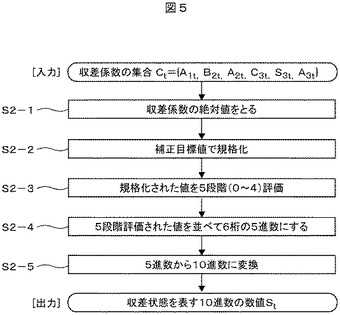
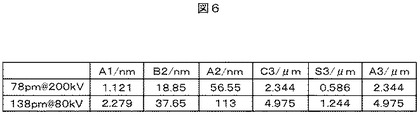
図5は、状態関数による収差状態の数値化手順(図4のS2)の詳細を示したフローチャートである。状態関数は、収差測定手段18が出力する収差係数の集合Ct={A1t,B2t,A2t,C3t,S3t,A3t}を入力とし、各収差係数の絶対値をとったのちに(S2−1)。補正目標値で規格化する(S2−2)。補正目標値は、例えばRayleighの4分の1波長則から計算される。
【0035】
図6に、加速電圧200kVにおいて分解能78pmを目標とした場合と、加速電圧80kVにおいて分解能138pmを目標とした場合の補正目標値を示す。
【0036】
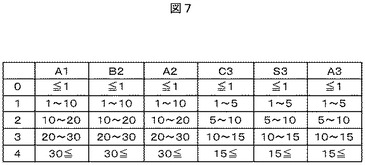
続いて、規格化された値を例えば図7に示す判定基準に従って、5段階評価して0〜4の数値に変換し(S2−3)、A1,B2,A2、C3,S3,A3の順に並べて6桁の5進数にする(S2−4)。最後に、5進数から10進数に変換することで(S2−5)、収差状態を表す10進数の数値stを得る。
【0037】
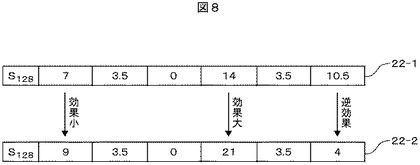
例えば、得られた10進数の数値stが128であったとして、図8の価値関数テーブル22−1に、収差状態s128を示す。
【0038】
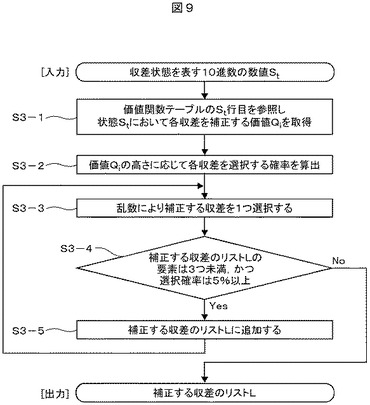
図9は、政策関数による補正する収差の選択手順(図4のS3)の詳細を示したフローチャートである。政策関数は状態関数が出力する収差状態stを入力とし、価値関数テーブルのst行目を参照することで収差状態stにおいてA1,B2,A2,C3、S3,A3を補正する価値QA1,QB2,QA2,QC3,QS3,QA3を取得する(S3−1)。図8の価値関数テーブル22−1の収差状態s128では、価値が、A1=7,B2=3.5,A2=0,C3=14,S3=3.5,A3=10.5となっている。そして、これらの価値の高さに応じて、各収差を選択する確率を算出する(S3−2)。選択確率の算出法として、例えば価値の高さをエネルギーとみなしたときの、次式(1)のボルツマン分布を各収差の選択確率piとする方法が考えられる(ボルツマン法)。
【0039】
【数1】

【0040】
ボルツマン分布の温度パラメータT(無次元量)により確率の分配が決まり、Tが大きいほど価値が小さい補正も選ばれやすくなる。但し、Tを大きくすると様々な収差の組み合わせに対して補正を試行するようになる反面、価値関数テーブルの収束が遅くなる。補正する収差を確率的に選択するのは、価値関数テーブルが準最適な値(ローカルミニマム)落ち着いてしまうことを防ぐためである。各収差の選択確率が得られたら、乱数を使って補正する収差を1つ選択する(S3−3)。
【0041】
図10は、乱数による収差選択の概念を示した図である。選択確率の総和は1であり、各収差の選択確率は0から1の間の数の直線上でその値に応じた幅を占有している。ここで、0以上1未満の実数が同じ確率で現れるような乱数vを発生させ、0≦v<v1ならばA1を、v1≦v<v2ならばB2を、v2≦v<v3ならばA2を、v3≦v<v4ならばC3を、v4≦v<v5ならばS3を、v5≦v<1ならばA3を選択する。図10の場合、v3≦v<v4となる確率が最も高いので、C3が選択されやすい。この乱数による収差の選択プロセス(S3−3)を繰り返すことで、最大で3つの収差を選択する。但し、選択確率が5%以下のものは除外する(S3−4)。このように選択確率に下限を設けて1度に複数の収差を選択することで、1度に複数の収差を補正する効率の良い補正を試しつつ、学習の結果として効果がなかったものは選択されないようになる。このようにして、例えば、図8の価値関数テーブル22−1の収差状態s128では、A1,C3,S3の3つの収差が選択される。補正する収差はリストLに追加され(S3−5)、該リストLは収差補正手段20に渡されて収差補正が実行される(S−4)。
【0042】
収差補正は、収差補正手段20が算出した制御量を元に制御手段24が収差補正器6と対物レンズ9にフィードバックをかけることで行われるが、乱調(収差係数が目標値の上下に振れ動くこと)をさけるために制御量(フィードバック量)には1以下の減衰係数Kが掛けられる。ここでKを、収差係数毎に測定誤差を考慮して、K=1.0−(測定の相対誤差)とする。例えば、測定の相対誤差が20%であれば、K=0.8として収差係数の80%分を補正する。減衰係数Kをこのように決めることで、測定値の信頼度に応じてフィードバック量を調整することが可能になり、Kを固定値とした場合に比べて効率のよい補正が可能となる。すなわち、収差が大きいときには測定の相対誤差が小さくなるので、フィードバック量を多くすることで補正の回数が減り、収差が小さいときには測定の相対誤差が大きくなるので、フィードバック量を小さくすることで乱調を防ぐことができる。
【0043】
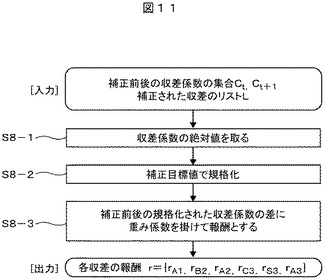
図11は、報酬関数による補正結果の評価手順(図4のS8)の詳細を示したフローチャートである。報酬関数は収差補正前後の収差係数の集合Ct={A1t,B2t,A2t,C3t,S3t,A3t}、Ct+1={A1t+1,B2t+1,A2t+1,C3t+1,S3t+1,A3t+1}、及び、政策関数で出力された補正する(補正された)収差のリストLを入力とする。
【0044】
まず、Ct及びCt+1の各要素について絶対値を取って(S8−1)補正目標値で規格化することで(S8−2)、補正前後の規格化された収差係数を得る、そして、補正前後の規格化された収差係数の差(補正前−補正後)に重み係数Wを掛けて報酬とする(S8−3)。これにより、各収差の報酬として、r={rA1,rB2,rA2,rC3,rS3,rA3}が出力される。重み係数Wは、補正後の総合的な収差が小さいほど大きくする。例えば、図5のS2−3で5段階評価された値の総和をΣとし、W=1/Σとする。以上のようにして決めた報酬は、補正の結果収差が減っていれば正、逆に増えていれば負となり、差が大きいほど報酬が大きく、また補正後の総合的な収差が小さいほど報酬が大きい。但し、補正されなかった収差(リストLに要素のない収差)の報酬はゼロとする。
【0045】
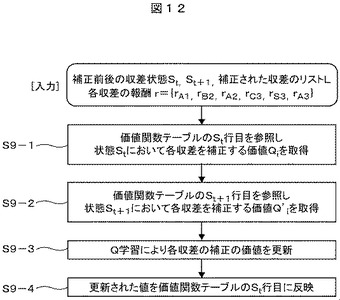
図12は、Q学習による価値関数テーブル22の更新手順(図4のS9)の詳細を示したフローチャートである。まず、価値関数テーブル22のst行目、及びst+1行目を参照して、補正前後の収差状態st、及びst+1においてA1,B2,A2,C3,S3,A3を補正する価値QA1,QB2,QA2,QC3,QS3,QA3,及びQ’A1,Q’B2,Q’A2,Q’C3,Q’S3,Q’A3を取得する(S9−1,S9−2)。例えば、st行目をs128(図8の価値関数テーブル22−1)とし、st+1行目をs345とする。これらの価値と報酬関数により計算された各収差の報酬riを使い、補正された収差に対する価値をQ学習により更新する(S9−3)。
【0046】
Q学習とは、強化学習における価値の更新法の一つで、次式(2)に従って価値を更新する。
【0047】
【数2】
【0048】
ここでαは学習率(0<α≦1)、γは割引率(0≦γ≦1)である。αは現在の価値と行動によって得られた結果のどちらを重視するかを表している。αが1に近いほど得られた結果を重視するようになり、価値の変化は大きくなる。逆にαを0に近づけると現在の価値を重視するようになり、価値の変化は小さくなる。一方、γは現在の報酬と将来の報酬のどちらを重視するかを表している。γが0に近いほど現在の報酬を重視し、1に近いほど将来の報酬を重視するようになる。本発明では、Q学習において標準的な値とされるα=0.1、γ=0.9とした。Q学習により更新された収差状態stにおける価値を価値関数テーブルのst行目に反映することで、学習結果が記録される(S9−4)。
【0049】
例えば、図8に示した価値関数テーブル22−1に基づいて補正された収差状態s128の収差に対する学習結果として、更新された価値関数テーブル22−2では、効果の大きかった収差係数C3に関する価値が14から21に大幅に増大し、効果の小さかった収差係数A1に関する価値が7から9に若干増加し、逆効果が認められた収差係数A3に関する価値が10.5から4に大幅減少している。
【0050】
このようにして、収差状態s128に関する収差補正のシーケンスを終えた後、収差状態をst+1、上記の例ではs345、で置き換えた後(図4のS10)、試行フェーズ(図4のS3)に戻り、次の収差状態s345に関するシーケンスで収差状態s128の場合と同様の処理を繰り返す。
【0051】
以上説明した自動調整プロセスにより、収差補正器の調整と同時に価値関数テーブル22の学習が進行し、調整を繰り返すほど効果的な収差補正が選択されるようになる。
【0052】
なお、仕様を同じくする荷電粒子線装置では、通常、初期値が同じ価値関数テーブル(マスターテーブル)がセットされる。本実施例によれば、各荷電粒子線装置の個体差を反映しマスターテーブルを学習により更新することで、各荷電粒子線装置の個体差を反映した最適な調整手順を与える、固有の価値関数テーブルとなる。
【0053】
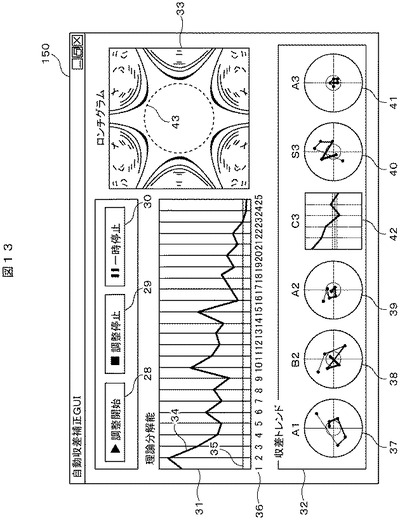
図13は、入出力手段15の、自動収差補正GUIの画面150の一例を示した図である。自動収差補正GUIの画面150は、調整を開始する調整開始ボタン28、調整を停止する調整停止ボタン29、調整を一時停止する一時停止ボタン30、調整の進捗を示す理論分解能グラフの表示部31、各収差係数の傾向を示す収差トレンドの表示部32、ロンチグラム観察手段16で取得されたロンチグラムの表示部33等で構成される。理論分解能グラフの表示部31では、横軸にシーケンス番号36、縦軸に分解能をとり、各収差の収差係数から計算した理論分解能ライン34と目標分解能ライン35が表示され、補正がどの程度進んでいるのかが視覚化される。理論分解能ライン34が目標分解能ライン35以下となるまで収差補正が繰り返し実行される。収差トレンドの表示部32は、過去数回分の補正の傾向を収差係数毎に視覚化したものである。収差係数が複素数で表される寄生収差(A1、B2、A2、S3、A3)については、複素平面上に収差係数をプロットして線で結んでいくことで(37〜41)、各収差の大きさだけでなく方向についても視覚化され、各収差の補正が正しい方向に進んでいるかどうかが明確になる。このとき、プロットを結ぶ線の色を、現在のものから過去のものに向かって徐々に薄くしていく、あるいは線の太さを徐々に細くしていくことで、線が複雑に交差したプロットでも補正の過程が見やすくなる。また、ロンチグラムの表示部33では、ロンチグラムの中央に見られるコントラストが一様なフラット領域が目標フラット領域ライン43まで拡がっているかどうかを見ることで、補正の程度を判断できる。ユーザは、収差補正の進捗状況やロンチグラムの状態に応じて、GUI画面150の調整停止ボタン29や一時停止ボタン30を操作し、それに伴って表示される新たなGUI画面に対して必要な操作を行うことができる。
【0054】
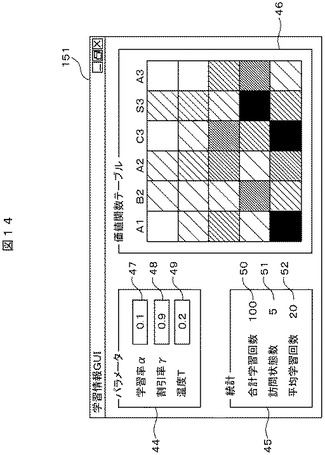
図14は、入出力手段15の画像表示部における学習情報GUIの画面151の一例を示した図である。学習情報GUIの画面151は、学習パラメータを設定するパラメータパネル44、学習の統計情報を表示する統計パネル45、価値関数テーブルを視覚化した価値関数テーブルパネル46で構成される。パラメータパネル44は、図12のフローチャートで述べたQ学習における学習率αと割引率γを設定するテキストボックス47と48、図9のS3−2で述べた選択確率の算出法としてボルツマン法を用いる場合の温度パラメータTを設定するテキストボックス49で構成される。統計パネル45は、学習の合計回数を表示する合計学習回数ラベル50、訪れた収差状態の数を表示する訪問状態数ラベル51、合計学習回数を訪問状態数で割った学習回数の平均値を表示する平均学習回数ラベル52で構成される。価値関数テーブルパネル46には、各収差状態siに関して、訪問された収差状態に対する価値の大きさが、グレースケールなどの色階調で表現される。これにより、ユーザは、学習がどの程度進んでいるのかを把握することができる。
【0055】
本実施形態によれば、自動収差補正装置が自律的に学習した価値関数テーブルの値に従って一度に複数の収差の補正を行うことかできる。なお、本実施形態は、より高次の収差を含む収差補正にも同様に適用可能である。
【0056】
本実施形態によれば、収差補正を複数同時に実施可能な、最適な調整手順を強化学習により獲得することで、荷電粒子線装置の個体差を反映した調整時間の短い自動収差補正が可能となる。また、自動収差補正装置が自律的に最適な調整手順を学習により獲得するので、ユーザは熟練した調整者でなくても適切な収差補正を行うことができる。
【実施例2】
【0057】
本発明の第二の実施形態になる荷電粒子線装置の例を、図15を参照しながら説明する。
【0058】
本発明においては、補正前後の収差係数から計算される報酬を元に価値関数テーブルが更新されるため、収差測定の正確性が重要になる。そこで、収差係数の測定履歴を記録しておき、収差測定のばらつきがある指定値以上あるときには、収差補正をしない方法も考えられる。
【0059】
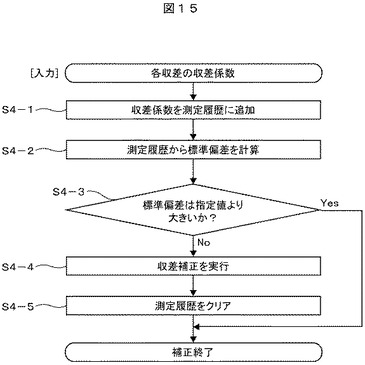
図15は、収差係数の測定のばらつきを考慮した収差補正の手順を示すフローチャートである。以下では、第一の実施形態との相違点についてのみ述べる。記憶装置21には、収差係数の測定履歴を記録する測定履歴テーブル(図示略)が保存されている。収差補正手段20は、収差測定手段18が出力した各収差係数を測定履歴テーブルに追加し(S4−1)、測定履歴テーブルのデータから標準偏差を計算する(S4−2)。標準偏差が指定された値よりも大きければ(S4−3)、収差補正は行われないが、小さければ収差補正を実行し(S4−4)、測定履歴テーブルをクリアする(S4−5)。尚、測定履歴と標準偏差の計算は、収差係数の大きさと方向を別々にしてもよい。
【0060】
本実施形態によれば、測定履歴を考慮し、正確性の高い収差測定に基づいて、収差補正を複数同時に実施可能な最適な調整手順を強化学習により獲得することにより、調整時間の短い自動収差補正が可能となる。また、自動収差補正装置が自律的に最適な調整手順を学習により獲得するので、荷電粒子線装置のユーザは熟練した調整者でなくても良い。
【実施例3】
【0061】
本発明の第三の実施形態になる荷電粒子線装置の例を、図16、図17を参照しながら説明する。
【0062】
収差補正の結果として負の報酬しか得られなかった場合、補正を行う前の状態に戻って収差補正の選択をやり直す方法が考えられる。補正を行う前の状態に戻るためには、制御手段24の制御量の履歴すなわち補正の履歴を記録しておき、指示があったら記録しておいた制御量に復帰するアンドゥ機能が必要になる。
【0063】
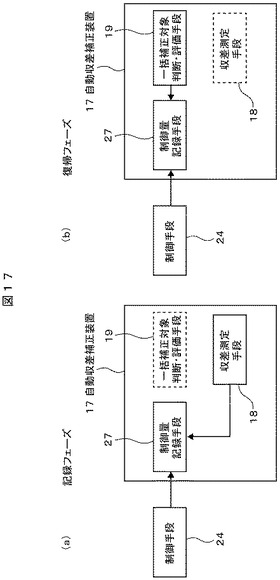
以下では、第一の実施形態との相違点についてのみ述べる。図16は、ヒストリーGUIの画面152の一例を示した図である。図17は、アンドゥ機能を実現するための自動収差補正装置17の構成図である。自動収差補正装置17は、制御手段24の制御量を記録する制御量記録手段27を備えている。
【0064】
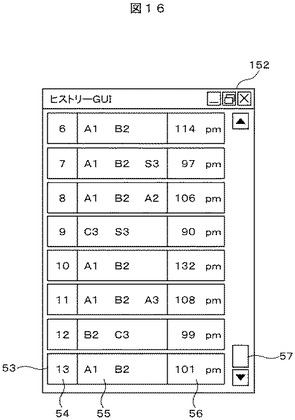
ヒストリーGUIの画面152において、ヒストリー項目53にはシーケンス番号54、補正された収差55、補正直前の理論分解能56が表示される。シーケンス番号54は、図13の自動収差補正GUIの画面150のシーケンス番号36に対応する。この例では、シーケンス毎に2つあるいは3つの収差が同時に補正され、それに伴い理論分解能56の値も変化している。また、シーケンス番号9で行われたC3とS3の補正を行う前の理論分解能56の値が最も良い。
【0065】
図17の(a)は記録フェーズで、収差測定手段18が収差測定を行った際に(図4のS−1、S−5)制御量記録手段27に対して制御手段24の制御量を記録するように指示する。図17の(b)は復帰フェーズで、一括補正対象判断・評価手段19で各収差係数の報酬を計算した際に(図4のS−8)、選ばれた収差補正の報酬が全て負であった場合は制御量記録手段27に対して制御手段24の制御量を記録しておいた値に復帰するように指示する。続いて行われる価値関数テーブルの更新では(図4のS−9)、選ばれた収差補正の価値は(報酬が負であったので)減少するため、図4のS−3に戻って収差補正の選択をやり直す際には別の収差補正が選択されやすくなる。
【0066】
また、制御量記録手段27が記録する制御量を過去に渡って保存しておくことで(補正の履歴)、任意時点の状態の制御量に復帰するヒストリー機能が実現できる。また、保存された制御量をファイルに書き出し、書き出されたファイルを読み込んで復帰できるようにすることも考えられる。
【0067】
ユーザが、画面152のヒストリー項目をマウスでダブルクリックすると、制御量記録手段27が制御手段24の制御量をその時点の値に復帰させることで状態を復元する。例えば、図16のシーケンス番号9のヒストリー項目をダブルクリックするなどして選択すると、シーケンス番号9で行われたC3とS3の補正を行う前の理論分解能90pmの状態に復元する。収差の補正が行われる度にヒストリー項目は増えていき、最新のヒストリー項目がヒストリーGUIの画面152の一番下に表示されるので、表示しきれないものはスクロールバー57を使って参照する。
【0068】
なお、以上説明したアンドゥ、ヒストリーは、ヒステリシス特性が顕著になるほど電磁レンズの状態を大きく変化させてしまうと完全には機能しない。しかし、通常の調整過程においては電磁レンズの状態を一度に大きく変えることはないので、一歩手前の状態に戻るアンドゥは問題なく機能する。ヒストリー機能による状態の復元度はどのくらい過去の状態に戻るかにも依存するが、調整過程の大部分を占める寄生収差の補正にはヒステリシス特性のない空芯の偏向コイルが用いられることが多いため、実用上の問題は少ない。
【0069】
本実施形態によれば、収差補正を複数同時に実施可能な、最適な調整手順を強化学習により獲得することにより、調整時間の短い自動収差補正が可能となる。また、自動収差補正装置が自律的に最適な調整手順を学習により獲得するので、ユーザは熟練した調整者でなくても適切な収差補正を行うことができる。
【実施例4】
【0070】
本発明の第四の実施形態になる荷電粒子線装置の例を、図18A、図18Bを参照しながら説明する。
本発明では、最適な価値関数テーブルを自律的な学習により最適化していくが、調整の過程で、状況に応じてユーザ(調整者)が価値関数テーブルの値を教示してもよい。
【0071】
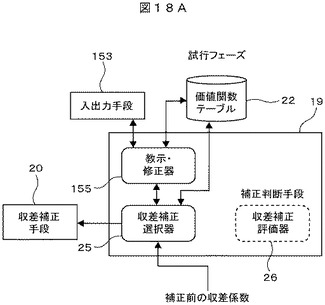
図18Aは、補正前の試行フェーズにおける、入出力手段15と、一括補正対象判断・評価手段19及び価値関数テーブル22の相互作用を示したものである。第一の実施形態と異なり、第四の実施形態では、一括補正対象判断・評価手段19は、教示・修正器155を備えている。また、入出力手段15は、教示GUI機能を有している。試行フェーズにおいて、収差測定手段18で測定された補正前の各収差係数と価値関数テーブル22を元に、収差補正選択器25が一括補正する収差を複数選択し、入出力手段15の画面153に表示する。ユーザ(調整者)は、必要に応じて、教示GUIで価値関数テーブルの値を教示し、この結果は教示・修正器155を経て収差補正選択器25に入力される。一括補正対象判断・評価手段19は、教示・修正されたデータに基づいて、収差補正手段20に一括補正の指示を出す。
【0072】
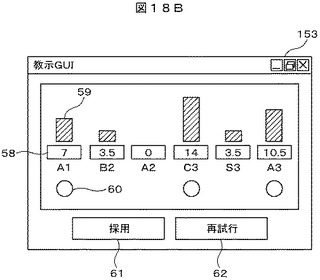
図18Bは、教示GUIの画面153の一例を示した図である。教示GUIの画面153が表示されているときは、採用ボタン61が押されるまで、図4のS4の補正は行われない。価値テキストボックス58と価値バー59には図9のS3−1で取得された価値Qiの値が反映され、図9のS3−2で選択された収差には○印60が付けられる。選択された収差が望ましいものであれば、調整者が採用ボタン61を押すことで図4のS4以下の処理が継続される。選択された収差が望ましいものでなければ、価値テキストボックス58に所望の値を代入し再試行ボタン62を押すことで、修正された価値に基づいて図9のS3−2、S3−3に示したプロセスにより補正する収差が再選択される。
【0073】
本実施形態によれば、収差補正を複数同時に実施可能な最適な調整手順を強化学習とユーザ(調整者)の経験とによって獲得することにより、調整時間の短い自動収差補正が可能となる。
【0074】
以上、走査型透過電子顕微鏡を例に本発明の各実施の形態を説明したが、本発明は収差の測定方法と補正方法に関しては何も制約がないので、他の荷電粒子線装置、例えば透過型電子顕微鏡、走査型電子顕微鏡、集束イオンビーム装置などの収差補正器への応用も可能である。
【0075】
このように、本発明によれば、過去の調整で効果のあった収差補正を複数同時に実施することで、調整時間の短い自動収差補正が可能となる。
【符号の説明】
【0076】
1…電子線源
2…電子線
3、4…収束レンズ
5…調整レンズ
6…収差補正器
7…転写レンズ
8…スキャンコイル
9…対物レンズ
10…試料
11…結像レンズ
12…暗視野像検出器
13…カメラ
14…暗視野像観察手段
15…入出力手段
16…ロンチグラム観察手段
17…自動収差補正装置
18…収差測定手段
19…一括補正対象判断・評価手段
20…収差補正手段
21…記憶装置
22…価値関数テーブル
23…変換係数テーブル
24…制御手段
25…収差補正選択器
26…収差補正評価器
27…制御量記録手段
28…調整開始ボタン
29…調整停止ボタン
30…一時停止ボタン
31…理論分解能グラフの表示部
32…収差トレンドの表示部
33…ロンチグラムの表示部
34…理論分解能ライン
35…目標分解能ライン
36…シーケンス番号
37…A1トレンド
38…B2トレンド
39…A2トレンド
40…S3トレンド
41…A3トレンド
42…C3トレンド
43…目標フラット領域ライン
44…パラメータパネル
45…統計パネル
46…価値関数テーブルパネル
47…学習率α設定テキストボックス
48…割引率γ設定テキストボックス
49…温度パラメータT設定テキストボックス
50…合計学習回数ラベル
51…訪問状態数ラベル
52…平均学習回数ラベル
53…ヒストリー項目
54…シーケンス番号(シーケンス番号36と対応)
55…補正された収差
56…理論分解能
57…スクロールバー
58…価値テキストボックス
59…価値バー
60…選択された印
61…採用ボタン
62…再試行ボタン
150…自動収差補正GUIの画面
151…学習情報GUIの画面
152…ヒストリーGUIの画面
153…教示GUIの画面。
【技術分野】
【0001】
本発明は、荷電粒子線装置に係り、特に、自動球面収差補正装置を備えた荷電粒子線装置に関する。
【背景技術】
【0002】
近年の透過型電子顕微鏡(TEM)や走査型透過電子顕微鏡(STEM)等の荷電粒子線装置には、球面収差補正装置(以下、収差補正器)を備えたものがある。この収差補正器は、TEMやSTEMにおいて分解能を制限する主な要因である対物レンズの球面収差(Cs)を補正するために用いられる。収差補正器としては、6極子場を発生させる2つの多極子レンズと、その間に2枚の軸対称レンズ(伝達レンズ)を配置したものが知られている(例えば特許文献1参照)。
【0003】
収差補正器により対物レンズのCsは補正される。しかし、収差補正器の不完全性、すなわち、多極子レンズを構成する個々の極子の位置ずれや、極子材料の磁気的特性のばらつきなどにより、寄生収差と呼ばれる余分な収差が発生してしまう。発生する3次以下の寄生収差は、2回対称1次非点収差(A1)、1回対称2次コマ収差(B2)、3回対称2次非点収差(A2)、2回対称3次スター収差(S3)、4回対称3次非点収差(A3)である。収差補正器の調整においては、Csの補正に加え、これら寄生収差の補正が必須となる。
【0004】
製品の収差補正器にはCsと寄生収差を補正するためのアライメント・ツールが付属しており、調整者はアライメント・ツールを用いることで半自動的に収差補正器の調整を行うことが出来る(例えば非特許文献1参照)。アライメント・ツールのGUI(グラフィカル・ユーザー・インターフェース)上には、収差測定ボタンと、複数ある収差のそれぞれに対応した収差補正ボタンが配置されている。収差測定ボタンを押すことで、複数枚取得された電子顕微鏡像から光学系に残存する各収差の大きさを表す収差係数が測定される(収差測定の方法に関しては例えば特許文献2参照)。収差補正ボタンを押すことで、測定された収差係数に応じて収差補正器にフィードバックがかかり、指定した収差が補正される(収差補正の方法に関しては例えば特許文献3、特許文献4参照)。
【0005】
アライメント・ツールを用いることで収差の測定と補正については自動で行われるが、収差測定の結果に基づいてどの収差を優先的に補正すべきかの判断は、調整者に委ねられている。通常、調整者は収差係数が最も大きい収差から優先的に補正していき、3次以下の収差が全て許容値以下となるまで補正を繰り返す。
【0006】
光ディスク装置の分野においては、収差を補正するための最適な制御量を学習する(探索により見つけた最適な状態を記録する)方法が開示されている(特許文献5参照)。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特表2002−510431号公報
【特許文献2】特開2007−180013号公報
【特許文献3】特開2007−266008号公報
【特許文献4】特開2006−114304号公報
【特許文献5】特開2010−218591号公報
【非特許文献】
【0008】
【非特許文献1】P. Hawkes,“Advances in IMAGING and ELECTRON PHYSICS Vol.153 Aberration-corrected Electron microscopy”, Academic Press,p.63 (2008)
【発明の概要】
【発明が解決しようとする課題】
【0009】
上述したように、アライメント・ツールを用いることで収差補正器の調整は半自動的に行われるが、調整に要する時間は補正する収差の判断によって変わってくる。
【0010】
ここで難しいのが、どの収差を補正するかの判断である。収差測定で得られる収差係数には誤差が避けられず、相対的に小さい収差ほど測定誤差が大きくなる傾向がある。例えば、ある一つの収差が支配的に大きい場合、他の小さな収差の測定誤差は大きくなり、測定誤差の大きな収差係数に基づいて補正を行うと収差が増えてしまうことがある。また、収差補正は互いに独立しているものもあるが干渉しあうものもあり、一方を補正すると他方が増えることがある。特に、3次収差の補正は2次以下の収差を増やす傾向がある。
【0011】
そのため、従来技術においては、収差係数が最大のものを1つだけ選んで優先的に補正するといった比較的簡単な規則に基づいた自動調整しか実現されていない(例えば特許文献4参照)。
【0012】
また、特許文献5に記載の技術の荷電粒子線装置への適用は困難である。何故なら、電磁レンズにヒステリシス特性があるため、装置の電源を落とすなどして電磁レンズの状態を大きく変化させた後に電磁レンズの状態を以前の最適な状態に復帰させても、元の最適な状態には戻らないからである。
【0013】
荷電粒子線装置において、収差係数が最も大きい収差だけでなく、2番目、3番目に大きい収差も一度に補正してしまえば、収差測定の回数が減ると考えられる。一般に、収差測定では1回の収差測定に対して複数の電子顕微鏡像を取得する必要があるために、1分前後の時間がかかる。しかし、収差補正のための収差補正器へのフィードバックでは1秒以下程度の時間しかかからない。そのため、1回の収差測定に対して同時に複数の収差を補正することができれば収差測定の回数を減らせるので、調整時間短縮の効果は大きいと考えられる。
【0014】
熟練した調整者は、各収差係数の大きさの割合や、どの収差係数が支配的なのかを考慮しながら、経験によって複数の収差を一度に補正する判断を下せる。こうした経験をあらかじめプログラム化しておけば、調整時間が短くなるような補正の判断を自動的に行うアライメント・ツールが実現できると考えられる。しかし、収差係数の大きさと種類の無数の組み合わせに対して最適な補正の判断をあらかじめ記述しておくのは現実的ではない。特に、荷電粒子線装置は、仕様が異なる場合のみならず仕様が同じ場合でもそれぞれ固有の因子、例えば、製作誤差に起因する極子のずれや磁気的特性のばらつき等の個体差や装置の設置環境の差等(以下、個体差)があり、これらの個体差を全て反映した荷電粒子線装置毎の、最適な補正の判断を自動的に行うことは実用化されていない。
【0015】
このように、従来技術において、収差の測定と補正は自動化されていたが、収差測定の回数を減らし調整時間を短くすることに関して、どのような補正を行うべきかの判断は自動化されていなかった。
【0016】
本発明の目的は、複数の収差に対する補正の判断を自動的に行うための最適な調整手順を学習により獲得し、調整時間をより短くすることのできる、自動収差補正装置を提供することである。
【課題を解決するための手段】
【0017】
上記課題を解決するために、本発明では、荷電粒子線源と、前記荷電粒子線源から放出された荷電粒子を荷電粒子線として試料に対して照射する荷電粒子光学系と、前記荷電粒子光学系の収差を補正する収差補正器と、前記荷電粒子光学系と前記収差補正器の各構成要素を制御する制御手段とを備えた荷電粒子線装置において、自律的に最適な調整手順を学習により獲得する自動収差補正装置を備えることを特徴とする。
【発明の効果】
【0018】
本発明によれば、各収差測定に対して過去の調整で効果のあった収差補正を複数同時に実施するので、調整時間の短い自動収差補正が可能となる。
【図面の簡単な説明】
【0019】
【図1】本発明の第一の実施形態における、荷電粒子線装置のシステムの構成例を示す図である。
【図2】第一の実施形態において、学習機能を実現している一括補正対象判断・評価手段と価値関数テーブルの相互作用を示す図である。
【図3】価値関数テーブルの構造例を示す図である。
【図4】第一の実施形態における、学習機能付き自動収差補正プロセスのフローチャートである。
【図5】状態関数による収差状態の数値化手順を示すフローチャートである。
【図6】補正目標値の例を示す図である。
【図7】状態関数における判定基準の例を示す図である。
【図8】価値関数テーブルの収差状態s128の更新前、更新後の例を示す図である。
【図9】政策関数による補正する収差の選択手順を示したフローチャートである。
【図10】乱数による収差選択の概念を示した図である。
【図11】報酬関数による補正結果の評価手順を示したフローチャートである。
【図12】Q学習による価値関数テーブルの更新手順を示したフローチャートである。
【図13】第一の実施形態における、自動収差補正GUIの画面を示した図である。
【図14】学習情報GUIの画面を示した図である。
【図15】本発明の第二の実施形態における、収差係数のばらつきを考慮した収差補正の手順を示すフローチャートである。
【図16】本発明の第三の実施形態における、ヒストリーGUIの画面を示した図である。
【図17】第三の実施形態における、補正のアンドゥ機能を実現するための構成図である。
【図18A】本発明の第四の実施形態における、一括補正対象判断・評価手段と価値関数テーブルの相互作用を示す図である。
【図18B】第四の実施形態における、教示GUIの画面を示した図である。
【発明を実施するための形態】
【0020】
本発明の荷電粒子線装置は、荷電粒子線源と、前記荷電粒子線源から放出された荷電粒子を荷電粒子線として試料に対して照射する荷電粒子光学系と、前記荷電粒子光学系の収差を補正する収差補正器と、前記荷電粒子光学系と前記収差補正器の各構成要素を制御する制御手段とを有するものにおいて、学習により複数の収差に対する最適な調整手順を獲得する自動収差補正装置を備えている。
本発明の代表的な実施形態では、収差係数の組み合わせ毎に各収差を補正したときに期待される効果(価値)を記述したテーブル(価値関数テーブル)を用意する。価値関数テーブルは、ある収差状態に対してどの収差を優先的に補正すべきかを数値化した表である。そして、価値関数テーブルに基づいて計算された収差補正の選択確率に従って一度に複数の収差の補正を試みる。すなわち、自動収差補正装置は、複数の収差を対象に一括して補正を行い、一括して評価することが可能である。ただし、測定された収差状態によっては、一度に1つの収差を対象とすることも当然有りうる。各補正の効果は報酬として各々定量化され、強化学習法により価値関数テーブルが更新される。報酬の大きい(補正の結果、収差が大きく減少した)補正ほど価値が高くなり、次回の補正における選択確率が上昇する。逆に、負の報酬をもたらした(補正の結果、収差が増えた)補正の価値は下がり、選択確率は下降する。このように、複数収差の同時補正の試みと、それらの補正効果の評価を、各収差が(目標の分解能が得られる)目標値以下の値となるまで繰り返す。調整を繰り返すほど価値関数テーブルは最適化されていき、過去の調整経験を活かした収差補正の判断が下せるようになる。換言すると、強化学習の結果得られた価値関数テーブルは、ある収差状態における各収差の最適な調整手順を数値として与える表である。
【0021】
各収差測定に対して過去の調整で効果のあった収差補正を複数同時に実施するので、調整時間の短い自動収差補正が可能となる。
また、自動収差補正装置が自律的に最適な調整手順を学習により獲得するので、ユーザは熟練した調整者でなくても適切な収差補正を行うことができる。
このように、収差補正を複数同時に実施可能な最適な調整手順を、強化学習により獲得することで、個々の荷電粒子線装置固有の状況を反映した、調整時間の短い自動収差補正が可能となる。
以下、本発明の実施の形態について、図面に基づき詳細に説明する。
【実施例1】
【0022】
本発明の第一の実施形態になる荷電粒子線装置の例を、図1〜図13を参照しながら説明する。
図1は、第一の実施形態における荷電粒子線装置の全体的なシステムの構成例を示す図である。図1では、荷電粒子線装置として走査型透過電子顕微鏡(STEM)を例にとって説明する。荷電粒子線装置は、電子線源1(荷電粒子線源)と、この荷電粒子線源から放出された荷電粒子を荷電粒子線として試料10に対して照射する荷電粒子光学系と、荷電粒子光学系の収差を補正する収差補正器6と、荷電粒子光学系と収差補正器の各構成要素を制御する制御手段24と、自動収差補正装置17とを備えている。
【0023】
電子線源1から放出された電子線2は、収束レンズ3、4の作用を受けて調整レンズ5の物面に焦点を結び、調整レンズ5の作用により収差補正器6に平行入射する。
【0024】
収差補正器6では電子線2の各収差が補正され、転写レンズ7の作用により対物レンズ9の上方に焦点を結ぶ。収差補正器6は、例えば、多段の6極子レンズと伝達レンズとを備え、Cs,A1,B2,A2,C3,S3,A3の各収差が自動的に補正される。
【0025】
収差が補正された電子線2は、対物レンズ9により収束されて、試料10上に微小なプローブを形成する。該プローブで試料10上をスキャンコイル8により走査し、試料10から出てくる散乱波を暗視野像検出器12で受け、該散乱波の強度を暗視野像観察手段14によりプローブ走査と同期させて入出力手段15の画像表示部に輝点列として表示することで、試料10の暗視野像を得る。ロンチグラムを観察する際には、スキャンコイル8による電子線の走査を止め、試料10から出てくる透過・散乱波をカメラ13で受け、該透過・散乱波の強度の2次元的な分布を、ロンチグラム観察手段16により入出力手段15の画像表示手段部に輝点列として表示する。結像レンズ11は、暗視野像検出器12とカメラ13に入射する電子線の拡がりを調整する。暗視野像観察手段14とロンチグラム観察手段16は、入出力手段15及び自動収差補正装置17と相互に接続されている。自動収差補正装置17の測定方法に基づき、切替え機能70により、暗視野像観察手段14とロンチグラム観察手段16のいずれかの出力が選択される(図2参照)。また、入出力手段15には、必要に応じて、GUI機能を有する複数の画面を備えた画面表示部を設け、各画面上のボタンや画像などを選択する事で、ユーザが荷電粒子線装置に対して各種の入力操作を行なったり出力情報を取得したりするようにしても良い。
【0026】
自動収差補正装置17は、収差測定手段18、一括補正対象判断・評価手段19、収差補正手段20で構成される。収差測定手段18は、暗視野像観察手段14から出力される暗視野像、もしくはロンチグラム観察手段16から出力されるロンチグラムを用いて、収差係数を測定する。一括補正対象判断・評価手段19は、収差測定手段18で測定された収差係数と、記憶装置21に保存された価値関数テーブル22を元に補正する収差を一括して複数あるいは1つ選択し、収差補正手段20に補正の指示を出す。収差補正手段20は一括補正を指示された各収差係数について、記憶装置21に保存された変換係数テーブル23を参照することで各収差係数から補正に必要な電流、電圧等の各制御量を算出し(変換係数テーブルはあらかじめ較正しておく)、制御手段24に各制御信号を出力する。該各制御信号に基づいて制御手段24が収差補正器6と対物レンズ9にフィードバックをかけることで、各収差が補正される。一括補正対象判断・評価手段19で、収差補正の効果が評価され、この学習結果が価値関数テーブル22に反映される。なお、自動収差補正装置17は、例えば、コンピュータに上記収差測定手段、一括補正対象判断・評価手段、及び収差補正手段の各機能を実現させるプログラムにより、実現される。
【0027】
本発明における自動収差補正装置17は、収差補正を複数同時に実施し、学習する機能を有している。この自動収差補正の学習機能は、主に、一括補正対象判断・評価手段19と価値関数テーブル22により実現される。一括補正対象判断・評価手段19は、複数の収差を対象に、一括して補正を行い、一括して評価することができる。この一括補正対象判断・評価手段19は、収差補正選択器25と、収差補正評価器26とを有している(図2参照)。収差補正選択器25は、一括補正する複数あるいは1つの収差を選択して収差補正手段20に補正の指示を出す。収差補正評価器26において、補正後の収差補正の効果は報酬として各々定量化され、この報酬に基づいて価値関数テーブル22が更新される。このような自律的な学習を、複数収差を対象に一括して行うことができる。この価値関数テーブル22に基づく調整手順を利用することで、荷電粒子線装置の個体差を反映した、調整時間の短い自動収差補正が可能となる。
図2は、一括補正対象判断・評価手段19と価値関数テーブル22の相互作用をある時点における補正の前後に分けて示したもので、補正前を試行フェーズ、補正後を評価フェーズと呼ぶ。試行フェーズ(図2(a))では、収差測定手段18で測定された補正前の各収差係数と価値関数テーブル22を元に、収差補正選択器25が一括補正する収差を複数選択し、収差補正手段20に一括補正の指示を出す。ここで、収差補正選択器25は、選択した各収差の種類とそれらの収差係数を保持しておく。評価フェーズ(図2(b))では、収差測定手段18で測定された一括補正後の各収差係数、及び収差補正選択器25が保持しておいた選択された各収差の種類とそれらの収差係数を元に、収差補正評価器26が一括補正の効果を評価して価値関数テーブル22を更新する。これら試行フェーズと評価フェーズを繰り返すことで価値関数テーブル22が最適化されていき、一括補正対象判断・評価手段19の判断精度が向上していく。
【0028】
ここで、価値関数テーブル22の詳細について説明する。図3は、価値関数テーブル22の構造を示す図である。価値関数テーブルとは、ある収差状態に対してどの収差を優先的に補正すべきかを数値化した表である。価値関数テーブル22は、各収差係数を各々の補正目標値で規格化した値をN段階に階級化し、該階級化された値を並べてできるN進数の数値を10進数に変換することで得られる数値を収差状態とし、この収差状態を行インデックスしたものである。なお、Nは、4〜8程度とするのが望ましい。図3の例では、6つの収差係数(A1,B2,A2,C3,S3,A3)を各々の補正目標値で規格化した値を5段階に階級化した、56に対応する15625行の収差状態s1〜s15625が記述されている。
【0029】
価値関数テーブル22の更新(学習)は、図2(b)で説明した評価フェーズにおいて計算される、ある収差状態sから特定の補正aをおこなったときの効果を定量化した報酬r(s,a)を元に行われる。価値関数テーブル22は収差係数の組み合わせを数値化した収差状態sを行インデックスとしていて、第si行目には収差状態siにおいてA1,B2,A2,C3,S3,A3を補正することで得られる報酬の推定値(価値Qと呼ぶ)QA1-i,QB2-i,QA2-i,QC3-i,QS3-i,QA3-iが記述してある。
【0030】
価値関数テーブル22の初期値は、報酬の真値に近いと考えられるものを設定しておくか、全くランダムな値を設定するかの二通りが考えられる。前者は熟練者の経験を価値関数テーブルの初期値としてそれを学習により改善していく方法で、後者は経験がまったく無い場合に試行錯誤によって価値関数テーブルを最適化していく方法である。前者における価値関数テーブルの初期値の決め方として、ある収差状態においては相対的に大きい収差ほど誤差の少ない補正が行われるはずなので価値を高く設定しておき、異なる収差状態の間では各収差係数の総和が小さい状態で行われる補正ほど目標とする補正状態に到達する可能性が大きいために高い価値を持つように設定する方法が考えられる。
【0031】
以下、図4に示すフローチャートに基づき、本発明における学習機能付き自動収差補正プロセス(以下、自動補正プロセス)について説明する。自動補正プロセスは、図2(a)で説明した試行フェーズ(図4のS1〜S4)と図2(b)で説明した評価フェーズ(図4のS5〜S9)に大別される。試行フェーズでは、収差測定手段18により現在の収差係数を測定し(S1)、状態関数により収差係数から収差状態を特定し(S2)、政策関数(Policy Function)により価値関数テーブル22に基づいて補正する収差を確率的に複数選択し(S3)、収差補正手段20により選択された収差を補正する(S4)。評価フェーズでは、収差測定手段18により補正後の収差係数を測定し(S5)、補正後の収差状態を特定し(S7)、報酬関数により補正の効果を報酬として定量化する(S8)。そして、報酬を元にQ学習により価値関数テーブルを更新することで学習結果を価値関数テーブル22に反映させる(S9)。評価フェーズの途中では各収差が補正目標値以下であるかどうかがチェックされ(S6)、Yesであれば収差補正のシーケンス、すなわち、収差の調整が終了する。各収差が目標値以下となるまで調整を繰り返すことにより、荷電粒子線装置固有の最適化された価値関数テーブルが得られる。一方、チェック結果がNoであれば補正前の収差係数と収差状態を、補正後の収差係数と収差状態にそれぞれ置き換えて(S10)、1回の収差補正のシーケンスを終えた後、試行フェーズS3に戻り、次のシーケンスで同様の処理を繰り返す。
【0032】
ここで、図2との関連を説明すると、図4のS2とS3は図2の収差補正選択器25で実行され、図4のS6〜S9は図2の収差補正評価器26で実行される。
【0033】
以下、上述した状態関数、政策関数、報酬関数、Q学習について詳細を説明する。
【0034】
図5は、状態関数による収差状態の数値化手順(図4のS2)の詳細を示したフローチャートである。状態関数は、収差測定手段18が出力する収差係数の集合Ct={A1t,B2t,A2t,C3t,S3t,A3t}を入力とし、各収差係数の絶対値をとったのちに(S2−1)。補正目標値で規格化する(S2−2)。補正目標値は、例えばRayleighの4分の1波長則から計算される。
【0035】
図6に、加速電圧200kVにおいて分解能78pmを目標とした場合と、加速電圧80kVにおいて分解能138pmを目標とした場合の補正目標値を示す。
【0036】
続いて、規格化された値を例えば図7に示す判定基準に従って、5段階評価して0〜4の数値に変換し(S2−3)、A1,B2,A2、C3,S3,A3の順に並べて6桁の5進数にする(S2−4)。最後に、5進数から10進数に変換することで(S2−5)、収差状態を表す10進数の数値stを得る。
【0037】
例えば、得られた10進数の数値stが128であったとして、図8の価値関数テーブル22−1に、収差状態s128を示す。
【0038】
図9は、政策関数による補正する収差の選択手順(図4のS3)の詳細を示したフローチャートである。政策関数は状態関数が出力する収差状態stを入力とし、価値関数テーブルのst行目を参照することで収差状態stにおいてA1,B2,A2,C3、S3,A3を補正する価値QA1,QB2,QA2,QC3,QS3,QA3を取得する(S3−1)。図8の価値関数テーブル22−1の収差状態s128では、価値が、A1=7,B2=3.5,A2=0,C3=14,S3=3.5,A3=10.5となっている。そして、これらの価値の高さに応じて、各収差を選択する確率を算出する(S3−2)。選択確率の算出法として、例えば価値の高さをエネルギーとみなしたときの、次式(1)のボルツマン分布を各収差の選択確率piとする方法が考えられる(ボルツマン法)。
【0039】
【数1】
【0040】
ボルツマン分布の温度パラメータT(無次元量)により確率の分配が決まり、Tが大きいほど価値が小さい補正も選ばれやすくなる。但し、Tを大きくすると様々な収差の組み合わせに対して補正を試行するようになる反面、価値関数テーブルの収束が遅くなる。補正する収差を確率的に選択するのは、価値関数テーブルが準最適な値(ローカルミニマム)落ち着いてしまうことを防ぐためである。各収差の選択確率が得られたら、乱数を使って補正する収差を1つ選択する(S3−3)。
【0041】
図10は、乱数による収差選択の概念を示した図である。選択確率の総和は1であり、各収差の選択確率は0から1の間の数の直線上でその値に応じた幅を占有している。ここで、0以上1未満の実数が同じ確率で現れるような乱数vを発生させ、0≦v<v1ならばA1を、v1≦v<v2ならばB2を、v2≦v<v3ならばA2を、v3≦v<v4ならばC3を、v4≦v<v5ならばS3を、v5≦v<1ならばA3を選択する。図10の場合、v3≦v<v4となる確率が最も高いので、C3が選択されやすい。この乱数による収差の選択プロセス(S3−3)を繰り返すことで、最大で3つの収差を選択する。但し、選択確率が5%以下のものは除外する(S3−4)。このように選択確率に下限を設けて1度に複数の収差を選択することで、1度に複数の収差を補正する効率の良い補正を試しつつ、学習の結果として効果がなかったものは選択されないようになる。このようにして、例えば、図8の価値関数テーブル22−1の収差状態s128では、A1,C3,S3の3つの収差が選択される。補正する収差はリストLに追加され(S3−5)、該リストLは収差補正手段20に渡されて収差補正が実行される(S−4)。
【0042】
収差補正は、収差補正手段20が算出した制御量を元に制御手段24が収差補正器6と対物レンズ9にフィードバックをかけることで行われるが、乱調(収差係数が目標値の上下に振れ動くこと)をさけるために制御量(フィードバック量)には1以下の減衰係数Kが掛けられる。ここでKを、収差係数毎に測定誤差を考慮して、K=1.0−(測定の相対誤差)とする。例えば、測定の相対誤差が20%であれば、K=0.8として収差係数の80%分を補正する。減衰係数Kをこのように決めることで、測定値の信頼度に応じてフィードバック量を調整することが可能になり、Kを固定値とした場合に比べて効率のよい補正が可能となる。すなわち、収差が大きいときには測定の相対誤差が小さくなるので、フィードバック量を多くすることで補正の回数が減り、収差が小さいときには測定の相対誤差が大きくなるので、フィードバック量を小さくすることで乱調を防ぐことができる。
【0043】
図11は、報酬関数による補正結果の評価手順(図4のS8)の詳細を示したフローチャートである。報酬関数は収差補正前後の収差係数の集合Ct={A1t,B2t,A2t,C3t,S3t,A3t}、Ct+1={A1t+1,B2t+1,A2t+1,C3t+1,S3t+1,A3t+1}、及び、政策関数で出力された補正する(補正された)収差のリストLを入力とする。
【0044】
まず、Ct及びCt+1の各要素について絶対値を取って(S8−1)補正目標値で規格化することで(S8−2)、補正前後の規格化された収差係数を得る、そして、補正前後の規格化された収差係数の差(補正前−補正後)に重み係数Wを掛けて報酬とする(S8−3)。これにより、各収差の報酬として、r={rA1,rB2,rA2,rC3,rS3,rA3}が出力される。重み係数Wは、補正後の総合的な収差が小さいほど大きくする。例えば、図5のS2−3で5段階評価された値の総和をΣとし、W=1/Σとする。以上のようにして決めた報酬は、補正の結果収差が減っていれば正、逆に増えていれば負となり、差が大きいほど報酬が大きく、また補正後の総合的な収差が小さいほど報酬が大きい。但し、補正されなかった収差(リストLに要素のない収差)の報酬はゼロとする。
【0045】
図12は、Q学習による価値関数テーブル22の更新手順(図4のS9)の詳細を示したフローチャートである。まず、価値関数テーブル22のst行目、及びst+1行目を参照して、補正前後の収差状態st、及びst+1においてA1,B2,A2,C3,S3,A3を補正する価値QA1,QB2,QA2,QC3,QS3,QA3,及びQ’A1,Q’B2,Q’A2,Q’C3,Q’S3,Q’A3を取得する(S9−1,S9−2)。例えば、st行目をs128(図8の価値関数テーブル22−1)とし、st+1行目をs345とする。これらの価値と報酬関数により計算された各収差の報酬riを使い、補正された収差に対する価値をQ学習により更新する(S9−3)。
【0046】
Q学習とは、強化学習における価値の更新法の一つで、次式(2)に従って価値を更新する。
【0047】
【数2】
【0048】
ここでαは学習率(0<α≦1)、γは割引率(0≦γ≦1)である。αは現在の価値と行動によって得られた結果のどちらを重視するかを表している。αが1に近いほど得られた結果を重視するようになり、価値の変化は大きくなる。逆にαを0に近づけると現在の価値を重視するようになり、価値の変化は小さくなる。一方、γは現在の報酬と将来の報酬のどちらを重視するかを表している。γが0に近いほど現在の報酬を重視し、1に近いほど将来の報酬を重視するようになる。本発明では、Q学習において標準的な値とされるα=0.1、γ=0.9とした。Q学習により更新された収差状態stにおける価値を価値関数テーブルのst行目に反映することで、学習結果が記録される(S9−4)。
【0049】
例えば、図8に示した価値関数テーブル22−1に基づいて補正された収差状態s128の収差に対する学習結果として、更新された価値関数テーブル22−2では、効果の大きかった収差係数C3に関する価値が14から21に大幅に増大し、効果の小さかった収差係数A1に関する価値が7から9に若干増加し、逆効果が認められた収差係数A3に関する価値が10.5から4に大幅減少している。
【0050】
このようにして、収差状態s128に関する収差補正のシーケンスを終えた後、収差状態をst+1、上記の例ではs345、で置き換えた後(図4のS10)、試行フェーズ(図4のS3)に戻り、次の収差状態s345に関するシーケンスで収差状態s128の場合と同様の処理を繰り返す。
【0051】
以上説明した自動調整プロセスにより、収差補正器の調整と同時に価値関数テーブル22の学習が進行し、調整を繰り返すほど効果的な収差補正が選択されるようになる。
【0052】
なお、仕様を同じくする荷電粒子線装置では、通常、初期値が同じ価値関数テーブル(マスターテーブル)がセットされる。本実施例によれば、各荷電粒子線装置の個体差を反映しマスターテーブルを学習により更新することで、各荷電粒子線装置の個体差を反映した最適な調整手順を与える、固有の価値関数テーブルとなる。
【0053】
図13は、入出力手段15の、自動収差補正GUIの画面150の一例を示した図である。自動収差補正GUIの画面150は、調整を開始する調整開始ボタン28、調整を停止する調整停止ボタン29、調整を一時停止する一時停止ボタン30、調整の進捗を示す理論分解能グラフの表示部31、各収差係数の傾向を示す収差トレンドの表示部32、ロンチグラム観察手段16で取得されたロンチグラムの表示部33等で構成される。理論分解能グラフの表示部31では、横軸にシーケンス番号36、縦軸に分解能をとり、各収差の収差係数から計算した理論分解能ライン34と目標分解能ライン35が表示され、補正がどの程度進んでいるのかが視覚化される。理論分解能ライン34が目標分解能ライン35以下となるまで収差補正が繰り返し実行される。収差トレンドの表示部32は、過去数回分の補正の傾向を収差係数毎に視覚化したものである。収差係数が複素数で表される寄生収差(A1、B2、A2、S3、A3)については、複素平面上に収差係数をプロットして線で結んでいくことで(37〜41)、各収差の大きさだけでなく方向についても視覚化され、各収差の補正が正しい方向に進んでいるかどうかが明確になる。このとき、プロットを結ぶ線の色を、現在のものから過去のものに向かって徐々に薄くしていく、あるいは線の太さを徐々に細くしていくことで、線が複雑に交差したプロットでも補正の過程が見やすくなる。また、ロンチグラムの表示部33では、ロンチグラムの中央に見られるコントラストが一様なフラット領域が目標フラット領域ライン43まで拡がっているかどうかを見ることで、補正の程度を判断できる。ユーザは、収差補正の進捗状況やロンチグラムの状態に応じて、GUI画面150の調整停止ボタン29や一時停止ボタン30を操作し、それに伴って表示される新たなGUI画面に対して必要な操作を行うことができる。
【0054】
図14は、入出力手段15の画像表示部における学習情報GUIの画面151の一例を示した図である。学習情報GUIの画面151は、学習パラメータを設定するパラメータパネル44、学習の統計情報を表示する統計パネル45、価値関数テーブルを視覚化した価値関数テーブルパネル46で構成される。パラメータパネル44は、図12のフローチャートで述べたQ学習における学習率αと割引率γを設定するテキストボックス47と48、図9のS3−2で述べた選択確率の算出法としてボルツマン法を用いる場合の温度パラメータTを設定するテキストボックス49で構成される。統計パネル45は、学習の合計回数を表示する合計学習回数ラベル50、訪れた収差状態の数を表示する訪問状態数ラベル51、合計学習回数を訪問状態数で割った学習回数の平均値を表示する平均学習回数ラベル52で構成される。価値関数テーブルパネル46には、各収差状態siに関して、訪問された収差状態に対する価値の大きさが、グレースケールなどの色階調で表現される。これにより、ユーザは、学習がどの程度進んでいるのかを把握することができる。
【0055】
本実施形態によれば、自動収差補正装置が自律的に学習した価値関数テーブルの値に従って一度に複数の収差の補正を行うことかできる。なお、本実施形態は、より高次の収差を含む収差補正にも同様に適用可能である。
【0056】
本実施形態によれば、収差補正を複数同時に実施可能な、最適な調整手順を強化学習により獲得することで、荷電粒子線装置の個体差を反映した調整時間の短い自動収差補正が可能となる。また、自動収差補正装置が自律的に最適な調整手順を学習により獲得するので、ユーザは熟練した調整者でなくても適切な収差補正を行うことができる。
【実施例2】
【0057】
本発明の第二の実施形態になる荷電粒子線装置の例を、図15を参照しながら説明する。
【0058】
本発明においては、補正前後の収差係数から計算される報酬を元に価値関数テーブルが更新されるため、収差測定の正確性が重要になる。そこで、収差係数の測定履歴を記録しておき、収差測定のばらつきがある指定値以上あるときには、収差補正をしない方法も考えられる。
【0059】
図15は、収差係数の測定のばらつきを考慮した収差補正の手順を示すフローチャートである。以下では、第一の実施形態との相違点についてのみ述べる。記憶装置21には、収差係数の測定履歴を記録する測定履歴テーブル(図示略)が保存されている。収差補正手段20は、収差測定手段18が出力した各収差係数を測定履歴テーブルに追加し(S4−1)、測定履歴テーブルのデータから標準偏差を計算する(S4−2)。標準偏差が指定された値よりも大きければ(S4−3)、収差補正は行われないが、小さければ収差補正を実行し(S4−4)、測定履歴テーブルをクリアする(S4−5)。尚、測定履歴と標準偏差の計算は、収差係数の大きさと方向を別々にしてもよい。
【0060】
本実施形態によれば、測定履歴を考慮し、正確性の高い収差測定に基づいて、収差補正を複数同時に実施可能な最適な調整手順を強化学習により獲得することにより、調整時間の短い自動収差補正が可能となる。また、自動収差補正装置が自律的に最適な調整手順を学習により獲得するので、荷電粒子線装置のユーザは熟練した調整者でなくても良い。
【実施例3】
【0061】
本発明の第三の実施形態になる荷電粒子線装置の例を、図16、図17を参照しながら説明する。
【0062】
収差補正の結果として負の報酬しか得られなかった場合、補正を行う前の状態に戻って収差補正の選択をやり直す方法が考えられる。補正を行う前の状態に戻るためには、制御手段24の制御量の履歴すなわち補正の履歴を記録しておき、指示があったら記録しておいた制御量に復帰するアンドゥ機能が必要になる。
【0063】
以下では、第一の実施形態との相違点についてのみ述べる。図16は、ヒストリーGUIの画面152の一例を示した図である。図17は、アンドゥ機能を実現するための自動収差補正装置17の構成図である。自動収差補正装置17は、制御手段24の制御量を記録する制御量記録手段27を備えている。
【0064】
ヒストリーGUIの画面152において、ヒストリー項目53にはシーケンス番号54、補正された収差55、補正直前の理論分解能56が表示される。シーケンス番号54は、図13の自動収差補正GUIの画面150のシーケンス番号36に対応する。この例では、シーケンス毎に2つあるいは3つの収差が同時に補正され、それに伴い理論分解能56の値も変化している。また、シーケンス番号9で行われたC3とS3の補正を行う前の理論分解能56の値が最も良い。
【0065】
図17の(a)は記録フェーズで、収差測定手段18が収差測定を行った際に(図4のS−1、S−5)制御量記録手段27に対して制御手段24の制御量を記録するように指示する。図17の(b)は復帰フェーズで、一括補正対象判断・評価手段19で各収差係数の報酬を計算した際に(図4のS−8)、選ばれた収差補正の報酬が全て負であった場合は制御量記録手段27に対して制御手段24の制御量を記録しておいた値に復帰するように指示する。続いて行われる価値関数テーブルの更新では(図4のS−9)、選ばれた収差補正の価値は(報酬が負であったので)減少するため、図4のS−3に戻って収差補正の選択をやり直す際には別の収差補正が選択されやすくなる。
【0066】
また、制御量記録手段27が記録する制御量を過去に渡って保存しておくことで(補正の履歴)、任意時点の状態の制御量に復帰するヒストリー機能が実現できる。また、保存された制御量をファイルに書き出し、書き出されたファイルを読み込んで復帰できるようにすることも考えられる。
【0067】
ユーザが、画面152のヒストリー項目をマウスでダブルクリックすると、制御量記録手段27が制御手段24の制御量をその時点の値に復帰させることで状態を復元する。例えば、図16のシーケンス番号9のヒストリー項目をダブルクリックするなどして選択すると、シーケンス番号9で行われたC3とS3の補正を行う前の理論分解能90pmの状態に復元する。収差の補正が行われる度にヒストリー項目は増えていき、最新のヒストリー項目がヒストリーGUIの画面152の一番下に表示されるので、表示しきれないものはスクロールバー57を使って参照する。
【0068】
なお、以上説明したアンドゥ、ヒストリーは、ヒステリシス特性が顕著になるほど電磁レンズの状態を大きく変化させてしまうと完全には機能しない。しかし、通常の調整過程においては電磁レンズの状態を一度に大きく変えることはないので、一歩手前の状態に戻るアンドゥは問題なく機能する。ヒストリー機能による状態の復元度はどのくらい過去の状態に戻るかにも依存するが、調整過程の大部分を占める寄生収差の補正にはヒステリシス特性のない空芯の偏向コイルが用いられることが多いため、実用上の問題は少ない。
【0069】
本実施形態によれば、収差補正を複数同時に実施可能な、最適な調整手順を強化学習により獲得することにより、調整時間の短い自動収差補正が可能となる。また、自動収差補正装置が自律的に最適な調整手順を学習により獲得するので、ユーザは熟練した調整者でなくても適切な収差補正を行うことができる。
【実施例4】
【0070】
本発明の第四の実施形態になる荷電粒子線装置の例を、図18A、図18Bを参照しながら説明する。
本発明では、最適な価値関数テーブルを自律的な学習により最適化していくが、調整の過程で、状況に応じてユーザ(調整者)が価値関数テーブルの値を教示してもよい。
【0071】
図18Aは、補正前の試行フェーズにおける、入出力手段15と、一括補正対象判断・評価手段19及び価値関数テーブル22の相互作用を示したものである。第一の実施形態と異なり、第四の実施形態では、一括補正対象判断・評価手段19は、教示・修正器155を備えている。また、入出力手段15は、教示GUI機能を有している。試行フェーズにおいて、収差測定手段18で測定された補正前の各収差係数と価値関数テーブル22を元に、収差補正選択器25が一括補正する収差を複数選択し、入出力手段15の画面153に表示する。ユーザ(調整者)は、必要に応じて、教示GUIで価値関数テーブルの値を教示し、この結果は教示・修正器155を経て収差補正選択器25に入力される。一括補正対象判断・評価手段19は、教示・修正されたデータに基づいて、収差補正手段20に一括補正の指示を出す。
【0072】
図18Bは、教示GUIの画面153の一例を示した図である。教示GUIの画面153が表示されているときは、採用ボタン61が押されるまで、図4のS4の補正は行われない。価値テキストボックス58と価値バー59には図9のS3−1で取得された価値Qiの値が反映され、図9のS3−2で選択された収差には○印60が付けられる。選択された収差が望ましいものであれば、調整者が採用ボタン61を押すことで図4のS4以下の処理が継続される。選択された収差が望ましいものでなければ、価値テキストボックス58に所望の値を代入し再試行ボタン62を押すことで、修正された価値に基づいて図9のS3−2、S3−3に示したプロセスにより補正する収差が再選択される。
【0073】
本実施形態によれば、収差補正を複数同時に実施可能な最適な調整手順を強化学習とユーザ(調整者)の経験とによって獲得することにより、調整時間の短い自動収差補正が可能となる。
【0074】
以上、走査型透過電子顕微鏡を例に本発明の各実施の形態を説明したが、本発明は収差の測定方法と補正方法に関しては何も制約がないので、他の荷電粒子線装置、例えば透過型電子顕微鏡、走査型電子顕微鏡、集束イオンビーム装置などの収差補正器への応用も可能である。
【0075】
このように、本発明によれば、過去の調整で効果のあった収差補正を複数同時に実施することで、調整時間の短い自動収差補正が可能となる。
【符号の説明】
【0076】
1…電子線源
2…電子線
3、4…収束レンズ
5…調整レンズ
6…収差補正器
7…転写レンズ
8…スキャンコイル
9…対物レンズ
10…試料
11…結像レンズ
12…暗視野像検出器
13…カメラ
14…暗視野像観察手段
15…入出力手段
16…ロンチグラム観察手段
17…自動収差補正装置
18…収差測定手段
19…一括補正対象判断・評価手段
20…収差補正手段
21…記憶装置
22…価値関数テーブル
23…変換係数テーブル
24…制御手段
25…収差補正選択器
26…収差補正評価器
27…制御量記録手段
28…調整開始ボタン
29…調整停止ボタン
30…一時停止ボタン
31…理論分解能グラフの表示部
32…収差トレンドの表示部
33…ロンチグラムの表示部
34…理論分解能ライン
35…目標分解能ライン
36…シーケンス番号
37…A1トレンド
38…B2トレンド
39…A2トレンド
40…S3トレンド
41…A3トレンド
42…C3トレンド
43…目標フラット領域ライン
44…パラメータパネル
45…統計パネル
46…価値関数テーブルパネル
47…学習率α設定テキストボックス
48…割引率γ設定テキストボックス
49…温度パラメータT設定テキストボックス
50…合計学習回数ラベル
51…訪問状態数ラベル
52…平均学習回数ラベル
53…ヒストリー項目
54…シーケンス番号(シーケンス番号36と対応)
55…補正された収差
56…理論分解能
57…スクロールバー
58…価値テキストボックス
59…価値バー
60…選択された印
61…採用ボタン
62…再試行ボタン
150…自動収差補正GUIの画面
151…学習情報GUIの画面
152…ヒストリーGUIの画面
153…教示GUIの画面。
【特許請求の範囲】
【請求項1】
荷電粒子線源と、
前記荷電粒子線源から放出された荷電粒子を荷電粒子線として試料に対して照射する荷電粒子光学系と、
前記荷電粒子光学系の収差を補正する収差補正器と、
前記荷電粒子光学系と前記収差補正器の各構成要素を制御する制御手段とを備えた荷電粒子線装置において、
自律的に最適な調整手順を学習により獲得する自動収差補正装置を備える
ことを特徴とする荷電粒子線装置。
【請求項2】
請求項1において、
前記自動収差補正装置は、
収差測定手段と、
一括補正対象判断・評価手段と、
収差補正手段と、
記憶装置と、
前記記憶装置に保存された価値関数テーブルを備え、
前記収差測定手段は前記荷電粒子光学系の収差係数を測定し、
前記価値関数テーブルは、測定された収差状態に対してどの収差を優先的に補正すべきかを示す値を保持しており、
前記一括補正対象判断・評価手段は、前記測定された収差係数と前記価値関数テーブルの値に基づいて、1回の前記収差測定に対して一括して補正する複数の収差を判断し、
前記収差補正手段は、前記一括補正対象判断・評価手段で前記補正の判断が下された前記各収差を一括して補正する
ことを特徴とする荷電粒子線装置。
【請求項3】
請求項2において、
前記一括補正対象判断・評価手段は、
前記収差測定手段により測定された収差補正前後の収差係数から該収差補正の効果を報酬として定量化し、
該報酬に基づいて前記価値関数テーブルの前記値を更新する
ことを特徴とする荷電粒子線装置。
【請求項4】
請求項2において、
前記価値関数テーブルは、
各収差係数を各々の補正目標値で規格化した値をN段階に階級化し、
該階級化された値を並べてできるN進数の数値を10進数に変換することで得られる数値を収差状態とし、
該収差状態を行インデックスとしたものである
ことを特徴とする荷電粒子線装置。
【請求項5】
請求項4において、
前記価値関数テーブルは、
初期値として、
ある行の前記収差状態においては、相対的に大きい収差ほど高い値を持ち、
異なる収差状態の間では、各収差係数の総和が小さい収差状態ほど高い値を持つように設定される
ことを特徴とする荷電粒子線装置。
【請求項6】
請求項2において、
前記一括補正対象判断・評価手段は、
前記価値関数テーブルに記載された価値の高さに応じて決まる選択確率に従って1つ乃至複数の収差を補正する判断を下す
ことを特徴とする荷電粒子線装置。
【請求項7】
請求項3において、
前記報酬は
補正後の総合的な収差が小さいほど大きい重み係数をWとして
W×((補正前の収差係数)−(補正後の収差係数))とする
ことを特徴とする荷電粒子線装置。
【請求項8】
請求項7において、
前記重み係数は
各収差係数を各々の補正目標値で規格化した値をN段階に階級化し、
該階級化された値の総和の逆数とする
ことを特徴とする荷電粒子線装置。
【請求項9】
請求項2において、
前記収差補正手段は、
前記記憶装置に保存された変換係数テーブルを参照することで補正する収差の収差係数から補正制御量に変換し、
該補正制御量に減衰係数Kを掛けて前記制御手段にフィードバックすることで前記収差を補正する
ことを特徴とする荷電粒子線装置。
【請求項10】
請求項9において、
前記減衰係数Kは、
1.0−(収差係数の相対誤差)とする
ことを特徴とする荷電粒子線装置。
【請求項11】
請求項2において、
前記制御手段の制御量を記録する制御量記録手段を備え、
前記制御量記録手段は、前記収差補正手段が収差を補正する前の前記制御手段の制御量を記録し、
前記一括補正対象判断・評価手段が算出する前記報酬が全て負の場合には該記録された制御量を前記制御手段に復帰させることで補正前の状態に戻る
ことを特徴とする荷電粒子線装置。
【請求項12】
請求項2において、
前記収差補正手段は、
前記収差測定手段により測定された収差係数を測定履歴として記録し、
該測定履歴から該収差係数の標準偏差を算出し、
該標準偏差が事前に設定された閾値以下となるまで前記収差の補正を制限する
ことを特徴とする荷電粒子線装置。
【請求項13】
請求項11において、
前記制御量記録手段は、
記録された前記制御手段の制御量を履歴として保存しておき、任意の時点の制御量を前記制御手段に復帰させることで任意の時点の状態に戻る
ことを特徴とする荷電粒子線装置。
【請求項14】
請求項11において、
前記制御量記録手段は、
記録された前記制御手段の制御量を外部記憶装置にファイルとして書き出し、該書き出されたファイルを読み込んで前記制御手段の制御量を復帰する
ことを特徴とする荷電粒子線装置。
【請求項15】
請求項2において、
前記自動収差補正装置は、画像表示手段を備え、
前記画像表示手段に前記補正の進捗を表示する
ことを特徴とする荷電粒子線装置。
【請求項16】
請求項15において、
前記補正の進捗は、複素数で表される収差係数を複素平面上にプロットするものである
ことを特徴とする荷電粒子線装置。
【請求項17】
請求項15において、
前記制御手段の制御量の履歴を記録する制御量記録手段を備えており、
前記画像表示手段に、前記制御量記録手段の情報に基づき、前記補正の履歴を表示し、
該表示された履歴の一項目に対する指定を受けて、該履歴に該一項目が追加された時点の前記制御量の状態に戻る
ことを特徴とする荷電粒子線装置。
【請求項18】
請求項15記載において、
前記画像表示手段に、前記価値関数テーブルの値と該価値関数テーブルの値を基に選択された収差を表示し、前記価値関数テーブルの修正を対話的に行えるようにした
ことを特徴とする荷電粒子線装置。
【請求項19】
荷電粒子線源と、
前記荷電粒子線源から放出された荷電粒子を荷電粒子線として試料に対して照射する荷電粒子光学系と、
前記荷電粒子光学系の収差補正の測定結果に基づき、実施した補正手順を評価する評価部と、
前記評価に基づき、他の補正手順よりも高い評価を得た補正手順を選択する選択部と、
前記選択された補正手順を実行する収差補正器と、
を有することを特徴とする荷電粒子線装置。
【請求項20】
荷電粒子線源と、
前記荷電粒子線源から放出された荷電粒子を荷電粒子線として試料に対して照射する荷電粒子光学系と、
前記荷電粒子光学系の収差補正の測定結果に基づき、実施した補正手順を評価する評価部と、
前記評価に基づき、補正手順を定めるテーブルの値を変更するテーブル変換部と、
前記テーブルに基づき定められた補正手順を実行する収差補正器と、
を有することを特徴とする荷電粒子線装置。
【請求項1】
荷電粒子線源と、
前記荷電粒子線源から放出された荷電粒子を荷電粒子線として試料に対して照射する荷電粒子光学系と、
前記荷電粒子光学系の収差を補正する収差補正器と、
前記荷電粒子光学系と前記収差補正器の各構成要素を制御する制御手段とを備えた荷電粒子線装置において、
自律的に最適な調整手順を学習により獲得する自動収差補正装置を備える
ことを特徴とする荷電粒子線装置。
【請求項2】
請求項1において、
前記自動収差補正装置は、
収差測定手段と、
一括補正対象判断・評価手段と、
収差補正手段と、
記憶装置と、
前記記憶装置に保存された価値関数テーブルを備え、
前記収差測定手段は前記荷電粒子光学系の収差係数を測定し、
前記価値関数テーブルは、測定された収差状態に対してどの収差を優先的に補正すべきかを示す値を保持しており、
前記一括補正対象判断・評価手段は、前記測定された収差係数と前記価値関数テーブルの値に基づいて、1回の前記収差測定に対して一括して補正する複数の収差を判断し、
前記収差補正手段は、前記一括補正対象判断・評価手段で前記補正の判断が下された前記各収差を一括して補正する
ことを特徴とする荷電粒子線装置。
【請求項3】
請求項2において、
前記一括補正対象判断・評価手段は、
前記収差測定手段により測定された収差補正前後の収差係数から該収差補正の効果を報酬として定量化し、
該報酬に基づいて前記価値関数テーブルの前記値を更新する
ことを特徴とする荷電粒子線装置。
【請求項4】
請求項2において、
前記価値関数テーブルは、
各収差係数を各々の補正目標値で規格化した値をN段階に階級化し、
該階級化された値を並べてできるN進数の数値を10進数に変換することで得られる数値を収差状態とし、
該収差状態を行インデックスとしたものである
ことを特徴とする荷電粒子線装置。
【請求項5】
請求項4において、
前記価値関数テーブルは、
初期値として、
ある行の前記収差状態においては、相対的に大きい収差ほど高い値を持ち、
異なる収差状態の間では、各収差係数の総和が小さい収差状態ほど高い値を持つように設定される
ことを特徴とする荷電粒子線装置。
【請求項6】
請求項2において、
前記一括補正対象判断・評価手段は、
前記価値関数テーブルに記載された価値の高さに応じて決まる選択確率に従って1つ乃至複数の収差を補正する判断を下す
ことを特徴とする荷電粒子線装置。
【請求項7】
請求項3において、
前記報酬は
補正後の総合的な収差が小さいほど大きい重み係数をWとして
W×((補正前の収差係数)−(補正後の収差係数))とする
ことを特徴とする荷電粒子線装置。
【請求項8】
請求項7において、
前記重み係数は
各収差係数を各々の補正目標値で規格化した値をN段階に階級化し、
該階級化された値の総和の逆数とする
ことを特徴とする荷電粒子線装置。
【請求項9】
請求項2において、
前記収差補正手段は、
前記記憶装置に保存された変換係数テーブルを参照することで補正する収差の収差係数から補正制御量に変換し、
該補正制御量に減衰係数Kを掛けて前記制御手段にフィードバックすることで前記収差を補正する
ことを特徴とする荷電粒子線装置。
【請求項10】
請求項9において、
前記減衰係数Kは、
1.0−(収差係数の相対誤差)とする
ことを特徴とする荷電粒子線装置。
【請求項11】
請求項2において、
前記制御手段の制御量を記録する制御量記録手段を備え、
前記制御量記録手段は、前記収差補正手段が収差を補正する前の前記制御手段の制御量を記録し、
前記一括補正対象判断・評価手段が算出する前記報酬が全て負の場合には該記録された制御量を前記制御手段に復帰させることで補正前の状態に戻る
ことを特徴とする荷電粒子線装置。
【請求項12】
請求項2において、
前記収差補正手段は、
前記収差測定手段により測定された収差係数を測定履歴として記録し、
該測定履歴から該収差係数の標準偏差を算出し、
該標準偏差が事前に設定された閾値以下となるまで前記収差の補正を制限する
ことを特徴とする荷電粒子線装置。
【請求項13】
請求項11において、
前記制御量記録手段は、
記録された前記制御手段の制御量を履歴として保存しておき、任意の時点の制御量を前記制御手段に復帰させることで任意の時点の状態に戻る
ことを特徴とする荷電粒子線装置。
【請求項14】
請求項11において、
前記制御量記録手段は、
記録された前記制御手段の制御量を外部記憶装置にファイルとして書き出し、該書き出されたファイルを読み込んで前記制御手段の制御量を復帰する
ことを特徴とする荷電粒子線装置。
【請求項15】
請求項2において、
前記自動収差補正装置は、画像表示手段を備え、
前記画像表示手段に前記補正の進捗を表示する
ことを特徴とする荷電粒子線装置。
【請求項16】
請求項15において、
前記補正の進捗は、複素数で表される収差係数を複素平面上にプロットするものである
ことを特徴とする荷電粒子線装置。
【請求項17】
請求項15において、
前記制御手段の制御量の履歴を記録する制御量記録手段を備えており、
前記画像表示手段に、前記制御量記録手段の情報に基づき、前記補正の履歴を表示し、
該表示された履歴の一項目に対する指定を受けて、該履歴に該一項目が追加された時点の前記制御量の状態に戻る
ことを特徴とする荷電粒子線装置。
【請求項18】
請求項15記載において、
前記画像表示手段に、前記価値関数テーブルの値と該価値関数テーブルの値を基に選択された収差を表示し、前記価値関数テーブルの修正を対話的に行えるようにした
ことを特徴とする荷電粒子線装置。
【請求項19】
荷電粒子線源と、
前記荷電粒子線源から放出された荷電粒子を荷電粒子線として試料に対して照射する荷電粒子光学系と、
前記荷電粒子光学系の収差補正の測定結果に基づき、実施した補正手順を評価する評価部と、
前記評価に基づき、他の補正手順よりも高い評価を得た補正手順を選択する選択部と、
前記選択された補正手順を実行する収差補正器と、
を有することを特徴とする荷電粒子線装置。
【請求項20】
荷電粒子線源と、
前記荷電粒子線源から放出された荷電粒子を荷電粒子線として試料に対して照射する荷電粒子光学系と、
前記荷電粒子光学系の収差補正の測定結果に基づき、実施した補正手順を評価する評価部と、
前記評価に基づき、補正手順を定めるテーブルの値を変更するテーブル変換部と、
前記テーブルに基づき定められた補正手順を実行する収差補正器と、
を有することを特徴とする荷電粒子線装置。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】

【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18A】
【図18B】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18A】
【図18B】
【公開番号】特開2013−30278(P2013−30278A)
【公開日】平成25年2月7日(2013.2.7)
【国際特許分類】
【出願番号】特願2011−163528(P2011−163528)
【出願日】平成23年7月26日(2011.7.26)
【出願人】(501387839)株式会社日立ハイテクノロジーズ (4,325)
【Fターム(参考)】
【公開日】平成25年2月7日(2013.2.7)
【国際特許分類】
【出願日】平成23年7月26日(2011.7.26)
【出願人】(501387839)株式会社日立ハイテクノロジーズ (4,325)
【Fターム(参考)】
[ Back to top ]