
落下物除去用走行ユニットおよびベルトコンベヤシステム
【課題】対象物の搬送作業を行う稼動中のベルトコンベヤ上から下部のアンダーカバーにこぼれ落ちた落下物を、効率的に掻き出して移動させて除去できる落下物除去用走行ユニットと、落下物を容易に回収して清掃的な作業を可能とするベルトコンベヤシステムとを提供する。
【解決手段】コンベヤベルト上に対象物を載置して所定の距離を移送させる対象物搬送用ベルトコンベヤ装置において、対象物搬送中にコンベヤベルトから落下した物を走行しながら除去するための落下物除去用走行ユニットであって、落下物除去用走行ユニットは、落下物のある面を走行するための駆動手段および駆動用バッテリーを含む自走手段と、走行しながら落下物を押し出すか掻き出すかするためのスクレーパ部とを備える。
【解決手段】コンベヤベルト上に対象物を載置して所定の距離を移送させる対象物搬送用ベルトコンベヤ装置において、対象物搬送中にコンベヤベルトから落下した物を走行しながら除去するための落下物除去用走行ユニットであって、落下物除去用走行ユニットは、落下物のある面を走行するための駆動手段および駆動用バッテリーを含む自走手段と、走行しながら落下物を押し出すか掻き出すかするためのスクレーパ部とを備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、砂、砕石、石炭、セメントなどのような一般的にはバラ物といわれる物を荷として搬送するのに適するベルトコンベヤ式の運搬装置に係り、より詳細には、搬送される対象物がコンベヤベルト上から落下したときに、その落下物を移動させて除去し回収することができるベルトコンベヤシステムに関するものである。
【背景技術】
【0002】
発電所やリサイクル設備等に使用されているベルトコンベヤ装置では、砂、砕石、石炭、鉄鉱石、石膏、セメントなどのようなバラケ状態となりうる粉粒体状の貨物を、その荷として搬送している。このような粉粒体状の搬送貨物は、輸送中にコンベヤベルトの両側部や前後端部から下方に相当量が落下することが通常であり、コンベヤベルトの下に設けられたアンダーカバーにはこれらの粉粒体状の搬送貨物が落塵物としてたまることとなる。そのため、それら落塵物の移動や除去、また回収や清掃などをしなくてはならず、そのために大きな労力や時間を必要としている。従来では、これらのこぼれ落ちた落塵物は、作業者がスコップ等を用いて移動・回収・清掃等を行っていた。
【0003】
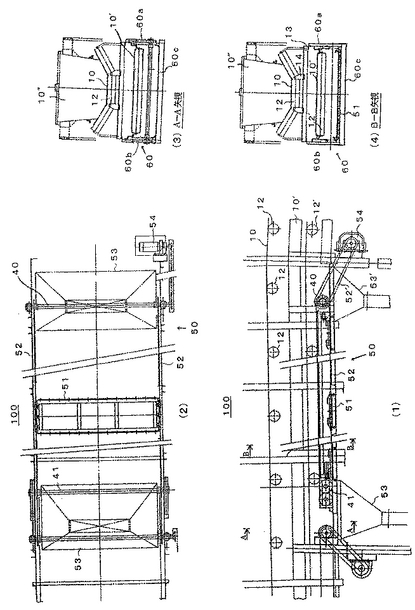
また、ベルトコンベヤ装置によっては、上述のような人手による回収作業の代わりに、これらの落塵物をスクレーパなどによって掻き取って回収するための掻き取り装置を具備しているものもあり、図4は、そのような掻き取り装置を有するベルトコンベヤ装置の従来例を示した図である。
図4(1)〜(4)はベルトコンベヤ装置100を示し、図4(1)はベルトコンベヤ装置100の側面からの構造説明図、図4(2)はベルトコンベヤ装置100の上面図であり、また、図4(3)は図4(1)のA−A断面によるA−A矢視図、図4(4)は図4(1)のB−B断面によるB−B矢視図である。
【0004】
図4のベルトコンベヤ装置100はごく一般的なものであるが、その構造は、左右の長手方向に延びたコンベヤ支持部材の左右端部(図示せず)に、テールプーリとヘッドプーリ(図示せず)を掛け渡し、これらのプーリ間に、多数のキャリヤローラー12(上部ローラー)とリターンローラー12'(下部ローラー)とを配置しておき、テールプーリ→キャリヤローラー12(上部ローラー)→ヘッドプーリ→リターンローラー12'(下部ローラー) →テールプーリのように、無端状にコンベヤベルト(10−10'−10'')がこれら多数のローラー上を移動させて周回するような構造を備えている。
図4(1)において、搬送貨物を載置できる上部のコンベヤベルト10が、キャリヤローラー12(上部ローラー)上を図の右方向または左方向へ移動するが、そのとき、搬送貨物を載置していない下部のコンベヤベルト10'は、リターンローラー12'(下部ローラー)上を上部のコンベヤベルト10'とは逆の方向へ移動するよう構成されている。
【0005】
図4のベルトコンベヤ装置100のコンベヤベルト(10,10')の下部には、アンダーカバー60が敷設されており、上部のコンベヤベルト10から落下してきた搬送貨物の落下物を、そこに受け止めて溜めることができるように構成されている。そして、図4(3)(4)において明らかなように、このアンダーカバー60は、底面部60cとその両側にある壁面部(60a,60b)とを有する断面略U字形の長尺の収納ラック状を成し、上部コンベヤベルト10のローラー支持部材14を支持するための梁状部材13より下側にある構成部材を、このアンダーカバー60内に収容できるような構造となっている。
【0006】
図4のベルトコンベヤ装置100では、コンベヤベルト(10,10')からの落下物を掻き出して回収するための掻き取り装置50を具備している。この掻き取り装置50は、モーター54の動力をチェーン52'から駆動軸があるプーリー40を介してコンベヤチェーン52に伝達しており、このコンベヤチェーン52に、駆動軸があるプーリー40とプーリー41との間で、両端円周で細長扁平形状の軌道で無端状の周回移動動作を行わせるよう構成されている。ここで、周回するコンベヤチェーン52の下側の位置にある部位では、このアンダーカバー60の底面部60cと接触しており、常時接触された状態のまま、コンベヤチェーン52は無端状の周回移動動作または往復移動動作を行う。
【0007】
そして、このコンベヤチェーン52には掻き取りユニット51が連結されており、コンベヤチェーン52の移動動作に従属してこの掻き取りユニット51も移動されるので、このアンダーカバー60の底面部60cに接触させながら掻き取りユニット51を移動させることができる。こうして、所定の方式で移動される掻き取りユニット51は、移動するに際して底面部60c上の落下物を掻き取ってそれを移動方向側に運搬することができる。この図4のベルトコンベヤ装置100では、このアンダーカバー60の底面部(床面部)60cにおいて、その面上に穿設されるようにして下方側に伸びる回収部(53,53')が配設されており、掻き取りユニット51によってその位置まで運搬された落下物を、これら回収部(53,53')に落とし込むことができる。
【0008】
図4で示したようなベルトコンベヤ落下物の掻き取りユニットが備えられた従来のベルトコンベヤ装置は、一般には上述したような掻き取りユニットの掻き板をチェーンで駆動させる方式を用いている。このために、コンベヤベルトの形状によっては取り付け箇所に制限を受ける、長尺のコンベヤ装置ではチェーンが大量に必要となる、チェーンがレールから脱落したりする、などのトラブルが発生することがよくある。さらに、装置が複雑化して大型化しているために、コスト的な負担がかなり大きく、またそれら装置のメンテナンスにも手間と費用がかる、などの問題点も発生している。
【0009】
ベルトコンベヤ装置の技術分野にかかる特許文献としては、例えば、特開平7−337730号公報、特開2001−315948号公報などがある。しかしながら、これらの文献で提示されている落荷回収装置は、装置が複雑で大型化していて多額の設備投資を必要とし、装置の操作やメンテナンスも煩雑で手間がかかり、コスト的な負担が相当に大きく、実用的にはかなり難があるものである。
【特許文献1】特開平7−337730号公報
【特許文献2】特開2001−315948号公報
【発明の開示】
【発明が解決しようとする課題】
【0010】
本発明は前述の問題点に鑑みてなされたものであり、搬送作業を行っている稼動中のベルトコンベヤ上から下部のアンダーカバーにこぼれ落ちた落下物を、より効率的に掻き出して移動させて除去できる落下物除去用走行ユニットと、それら落下物を容易に回収して清掃的な作業をも可能とするベルトコンベヤシステムとを提供することをその目的とし、さらに、設備が複雑化・大型化することがなく、コスト的な負担が少ない落下物除去用走行ユニットおよびベルトコンベヤシステムを提供することをもその目的とする。
【課題を解決するための手段】
【0011】
(1)コンベヤベルト上に対象物を載置して所定の距離を移送させる対象物搬送用ベルトコンベヤ装置において、対象物搬送中に前記コンベヤベルトから落下した物を走行しながら除去するための落下物除去用走行ユニットであって、
前記落下物除去用走行ユニットは、
落下物のある面を走行するための駆動手段および駆動用バッテリーを含む自走手段と、走行しながら落下物を押し出すか掻き出すかするためのスクレーパ部と、を備える。
(2)(1)の落下物除去用走行ユニットにおいて、
前記スクレーパ部は、落下物に当接してこれを押し出すためのスクレーパ本体部と、落下面上の落下物を掻き出すためのスクレーパ端辺部と、を備える。
(3)(1)の落下物除去用走行ユニットにおいて、
前記落下物除去用走行ユニットは、外部装置との無線通信手段を備える。
【0012】
(4)コンベヤベルト上に対象物を載置して所定の距離を移送させる対象物搬送用のベルトコンベヤシステムであって、
対象物の搬送中に前記コンベヤベルトから落下した落下物を、自走式スクレーパ装置によって押し出すか掻き出すかして移動させ、それら移動させた落下物を回収する落下物回収システムを備え、
前記自走式スクレーパ装置には、請求項1〜3いずれかに記載の落下物除去用走行ユニットが適用される。
【0013】
(5)(4)のベルトコンベヤシステムにおいて、
前記コンベヤベルトの下方で落下物のある位置に、前記自走式スクレーパ装置を走行させるための走行路を備える。
(6)(5)のベルトコンベヤシステムにおいて、
前記自走式スクレーパ装置の走行路は、少なくとも片側に側壁を有し、
前記自走式スクレーパ装置は、走行中に前記側壁との接触を緩和するための緩衝手段を有する。
(7)(4)〜(6)のベルトコンベヤシステムにおいて、
前記自走式スクレーパ装置は、所定の走行方式に従って自動的に走行運転するように制御される。
(8)(7)のベルトコンベヤシステムにおいて、
前記自走式スクレーパ装置は、所定の走行方式の1サイクル完了後、次の走行までの間にバッテリーの充電を行う手段を備える。
【発明の効果】
【0014】
本発明による落下物除去用走行ユニットおよびベルトコンベヤシステムによれば、アンダーカバーにこぼれ落ちた落下物を、付属する自走式のスクレーパ装置によって、より簡単で効率的に掻き出して移動させて除去することができ、また、それら落下物を容易に回収して清掃的な作業をも可能とするベルトコンベヤシステムが提供できる。そして、本発明では、装置のある設備全体を複雑化・大型化することがなく、コスト的な負担が少ないベルトコンベヤシステムを提供することができる。
【発明を実施するための最良の形態】
【0015】
以下に、本発明による落下物除去用走行ユニットおよびベルトコンベヤシステムにかかる好適な実施形態を、添付の図1〜図3に基づいて説明する。
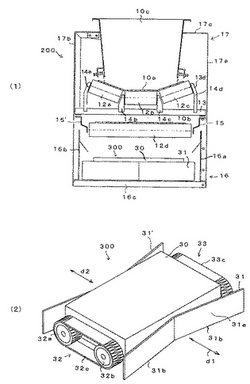
図1(1)は、本発明の一実施形態にかかるベルトコンベヤシステム200を断面によって示した構造説明図であって、このシステム200は、落下物除去用走行ユニット300を備えている。また、図1(2)は、落下物除去用走行ユニット200を示す外観斜視図であり、矢印d1とd2はこの走行ユニット200が走行する方向を示す。
【0016】
図1(1)に示すように、本発明によるベルトコンベヤシステム200は、上部にあるコンベヤカバー17と下部にあるアンダーカバー16とによって、各構成部材が包囲されるような構造をなし、その内部には連続するコンベアベルト(10a,10b,10c)を配置して動力によってこれらを無端状に周回移動させ、コンベヤベルト10a上に対象物を載置してその移送が行われる。
ベルトコンベヤシステム200のコンベヤカバー17は、その天井部にあたる上面カバー部17c、その側面部にあたる左右の側面カバー部(17a,17b)とを備え、この上面カバー部17cと左右の側面カバー部(17a,17b)とによって、断面逆U字形状の外枠体を形成していて、その内部が中空となっている。
【0017】
そこで、コンベヤカバー17の左右の側面カバー部(17a,17b)の下段付近に、水平に張り渡した梁状支持部材13を配設し、この梁状支持部材13上には複数のローラー支持部材(14a,14b,14c,14d)を上方に向けて配設し、これらによってキャリアローラ(12a,12b,12c)の中心軸を支持し、コンベヤベルト10aの移動動作に伴って、これらキャリアローラ(12a,12b,12c)を回動させるように構成する。
さらに、左右の側面カバー部(17a,17b)の最下方の位置では、梁状支持部材13に略平行する位置において、両側の別の支持部材(15,15')を介してリターンローラー12dが配設されている。このリターンローラー12dは、アンダーコンベヤカバー16内の上部に配置されており、このリターンローラー12dの上面を下部コンベアベルト10bが移動して通れるよう配置設定がなされている。
【0018】
図1(1)に示すように、本発明によるベルトコンベヤシステム200の下部にあるアンダーコンベヤカバー16は、その最下部にあたる底面部(床面部)16cと、その側面部にあたる左右の側壁カバー部(16a,16b)と、を備え、コンベヤベルトからの落下物はこの底面部16cにおいて滞留する。ここで、アンダーコンベヤカバー16は、左右の側壁カバー部(16a,16b)と底面部(床面部)16cとで、断面U字形状の外枠体を形成していてその内部が中空となっており、左右の側壁カバー部(16a,16b)の上段付近の位置に、下部コンベアベルト10b用のリターンローラー12dが水平に配置されている。そして、リターンローラー12dと底面部16cとで作られる空間には、落下物を移動させて除去させるための落下物除去用ユニットである自走式のスクレーパ装置300が配設され、底面部16c上を走行する。
【0019】
本発明によるスクレーパ装置300は、対象物を搬送中のコンベヤベルトから落下した物を、走行しながら掻き出すか押し出すかして除去することができる落下物除去用走行ユニットであり、本ベルトコンベヤシステム200のアンダーコンベヤカバー16の最下部にある平坦な底面部(床面部)16cを走行路としてこの上を走行することができる。スクレーパ装置300は、直進走行した場合にスムーズな走行ができるように、装置筐体の横幅を、アンダーコンベヤカバー16の左右の側壁カバー部(16a,16b)の幅よりやや小さくなるように設計されるとよい。
【0020】
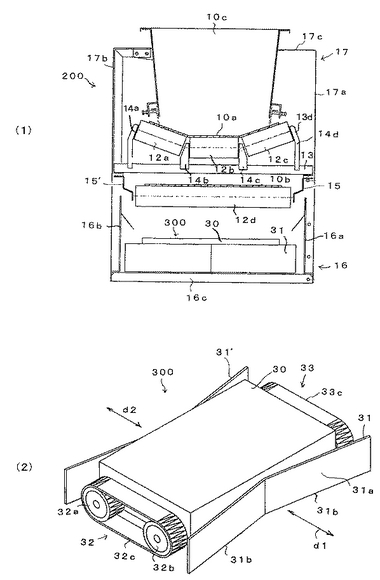
図1(1)に示すように、スクレーパ装置300は、走行するための駆動手段および駆動用バッテリーを搭載する立方体形状の自走機本体30(装置筐体)を有し、この自走機本体30が進行する方向線に略平行な両側面のうち片側面には車輪束32を、また他の側面に車輪束33を有し、進行方向線の軸に略鉛直する面となるようにスクレーパ部(31と31')を設ける。
このスクレーパ部(31と31')は、走行しながら落下物を押し出すか掻き出すかすることができる部位であり、落下物に当接または押し当ててこれを進行方向へ押し出すためのスクレーパ本体部31aと、落下面上の落下物を掻き出すためのスクレーパ端辺部31bと、を備える。
【0021】
スクレーパ装置300の自走機本体30の片側面にある車輪束32は、車輪32aと車輪32bとそれらをコンベヤベルト式に接続して結合するキャタピラ部32Cとからなり、同じく他方の車輪束33は、車輪33aと車輪33b(図示せず)およびそれらを結合するキャタピラ部33Cとからなり、それぞれの車輪は、車輪32a−車輪33a、車輪32b−車輪33bは共通する車軸によって結合され、スクレーパ装置300は4輪キャタピラ式の自動車のように走行する。
これらの車輪は、クラッチ、スプロケット、チェーンなどの動力伝達機構を介して、モーター等の駆動装置に接続連結されており、スクレーパ装置300が内蔵するCPUを含む制御部によって、停止/走行の動作、速度、方向、位置、距離、時間などが管理され、これらの車輪の動作に伴うスクレーパ装置300の走行が制御される。
【0022】
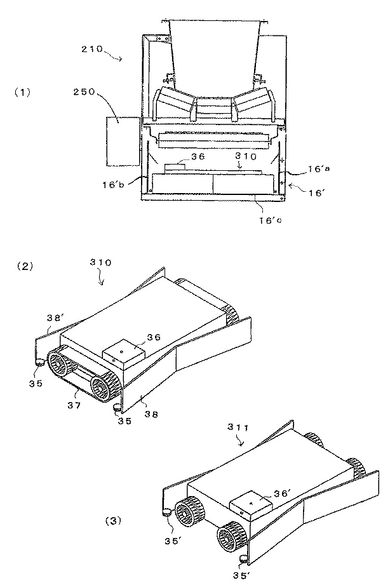
図2は、本発明による落下物除去用走行ユニットおよびベルトコンベヤシステムにかかる別の実施形態を示す図である。
図2(1)におけるベルトコンベヤシステム210は、スクレーパ装置310と制御ユニット250とを備える。ここでのスクレーパ装置310は、自走機本体の上面にコネクタ部36を備えており、ここを介して外部装置との無線通信することができるし、また、バッテリーの充電もすることができる。
【0023】
ここでの制御ユニット250は、スクレーパ装置310から離間して、例えば、コンベヤカバーまたはアンダーカバーの外側に接する位置に配設することができ、無線通信手段によってスクレーパ装置310を制御することができるし、また、スクレーパ装置310に有線で接続して電源を供給し、バッテリー充電を行うこともできる。また、この制御ユニット250は、CPUまたはシーケンス回路などの電気回路からなり、スクレーパ装置310の制御部に対して制御信号を送り、所望する走行方式に従ってこれを制御することができる。
【0024】
図2(1)において、コンベヤベルトシステム210では、アンダーカバー16'の底面16'cがこのスクレーパ装置310の走行路となっており、走行路16'cの両側は側壁16'aと16'bとなっている。ここで、スクレーパ装置310の横幅寸法は、側壁16'a−16'b間の寸法よりやや小さく設定されており、側壁16'aと側壁16'bにはあまり接触せずに直進する走行が期待される。ところが、落下物の状態によってはスクレーパ装置310の走行が阻害されて、側壁に接触することがあり、走行中に側壁との接触を緩和するための緩衝手段を備えることとした。この図2(2)(3)では、スクレーパ部38の側端から横方向に突出させて緩衝部材(35,35')を配設しており、ここでの緩衝部材(35,35')として、例えば、車輪状で軸心回動のできるサイドローラー機構を用いることとし、このサイドローラー自体の回転により衝撃を緩和すると共に、走行の円滑な推進をも行うことができる。
【0025】
図2(2)のスクレーパ装置310は、サイドローラー35とコネクタ部36を備えているが、車輪の構成は、図1(2)に示したスクレーパ装置300と同じキャタピラ式である。また、図2(3)のスクレーパ装置311は、サイドローラー35'とコネクタ部36'を備えているが、車輪の構成は、図1(2)に示したスクレーパ装置300からキャタピラ部を除いたタイヤ式といわれる構成となっている。このように、本発明によるスクレーパ装置300での車輪を含む走行方式には種々のものがあり、タイヤ式やキャタピラ式については述べてきたが、その他にも、レールを敷設してその上を走行するレール式もあり、ベルトコンベヤシステムの設計に合わせて各種の走行方式を選定すればよい。
【0026】
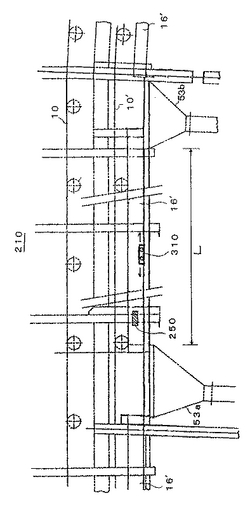
さて、図3は、本発明の一実施形態によるベルトコンベヤシステム210の概要を示す図であって、側面による構造説明図である。コンベヤベルト(10,10')の下部には、断面U字形のアンダーカバー16'が敷設されており、このアンダーカバー16'の底部は走行路となり、図3の左右方向に走行するスクレーパ装置310が配備されている。このスクレーパ装置310は、スクレーパ部を有することによって、走行路上にある落下物に接触してこれを掻き取りながら移動させて押し出し、進行方向に運搬することができる。図3にあるアンダーカバー16'の底面部である走行路には、そこに開穴または穿設されるようにして下方に伸びる回収部(53a,53b)が配設されており、スクレーパ装置310によってその位置まで運搬された落下物を、これら回収部(53a,53b)に落とし込んで除去することができる。ここでのスクレーパ装置310は、例えば、回収部53aと回収部53bとの口元位置による移動距離Lに従って、走行路を前進移動または後進移動するように制御されたり、往復移動走行やその複数回の繰り返し走行などのように制御されたりし、また、希望される時間間隔や走行時間長さにしたがって走行するよう制御されてもよい。
【0027】
本発明による落下物除去用走行ユニットおよびベルトコンベヤシステムでは、様々な実施形態が考えられるが、例えば、次のような設計が可能である。
・本発明による落下物除去用走行ユニットは、掻板(スクレーパ板)、バッテリー、駆動手段を搭載する自走式の掻き取り装置(スクレーパ装置)とすることができる。
・本発明によるベルトコンベヤシステムでは、スクレーパ装置を充電するためのバッテリー充電装置を、システム内の所定位置に設けることができる。
・本発明によるベルトコンベヤシステムでは、スクレーパ装置を、タイマーによる自動運転させるよう制御することができる。
・本発明によるベルトコンベヤシステムでは、スクレーパ装置を、一定時間毎に運転するよう制御することができる。
【0028】
・本発明によるベルトコンベヤシステムでは、バッテリー充電装置と共に制御盤を設け、一定時間毎に運転信号を送り、運転動作を開始させることができる。
・本発明によるベルトコンベヤシステムでは、スクレーパ装置がコンベヤ端部または回収部に達したことを、リミットスイッチで検知し、逆方向に走行運転することができる。
・本発明によるベルトコンベヤシステムでは、スクレーパ装置が所定の定位置に戻ったことをリミットスイッチなどによって検知して、そのスクレーパ装置に充電を開始することができる。このようにして、本発明による自走式のスクレーパ装置は、バッテリー充電装置と制御盤によって、所定の走行方式の1サイクル完了後、次の走行までの間にバッテリーの充電を行うよう制御されることが可能である。
・スクレーパ装置の走行方式は、タイヤ式、キャタピラ式、レール式などがあり、ベルトコンベヤシステムに合わせて選定することができる。
【産業上の利用可能性】
【0029】
本発明による落下物除去用走行ユニットおよびベルトコンベヤシステムは、発電所やリサイクル設備等に使用されている粉粒体状貨物を搬送するベルトコンベヤ装置において、基本的なベルトコンベヤ機構は変えることなく、スクレーパ装置と付属コントローラーとを付加することによって容易に適用することができる。このように、本発明を既存のベルトコンベヤ装置に適用するにあたっては、ベルトコンベヤ設備の大きな改造や変更が必要なく、メンテナンスも楽にできるので、多額の資金投資も必要としないという長所があり、従来では、スコップ等を用いて落下物の移動・回収・清掃を行っていた作業者らの労力や時間を大幅に改善することができるので、ベルトコンベヤ産業上の利用可能性は極めて大きい。
【図面の簡単な説明】
【0030】
【図1】図1(1)は、本発明の一実施形態にかかるベルトコンベヤシステム200を断面によって示した構造説明図であり、また、図1(2)は、本発明の一実施形態にかかる落下物除去用走行ユニット200を示す外観斜視図である。
【図2】図2(1)は、本発明の一実施形態にかかるベルトコンベヤシステム210を断面によって示した構造説明図であり、また、図2(2)は、本発明の一実施形態にかかる落下物除去用走行ユニット310を示す外観斜視図、図2(3)は、本発明の一実施形態にかかる落下物除去用走行ユニット311を示す外観斜視図である。
【図3】本発明の一実施形態にかかるベルトコンベヤシステム210の側面による構造説明図である。
【図4】図4(1)〜(4)は従来のベルトコンベヤ装置100を説明するための図であって、図4(1)はベルトコンベヤ装置100の側面による構造説明図、図4(2)はベルトコンベヤ装置100の上面図であり、また、図4(3)は図4(1)のA−A断面によるA−A矢視図、図4(4)は図4(1)のB−B断面によるB−B矢視図である。
【符号の説明】
【0031】
200,210 ベルトコンベヤシステム
300,310,311 落下物除去用走行ユニット(自走式スクレーパ装置)
d1,d2 走行ユニット300の走行方向
10a,10b,10c,10,10' コンベヤベルト
12a,12b,12c キャリアローラー(上部ローラ)
12d リターンローラー(下部ローラ)
13 梁状支持部材
14a,14b,14c,14d ローラー支持部材
16 アンダーコンベヤカバー(下部カバー)
16a,16b 側壁カバー部
16c 底面部(床面部、走行路)
17 上部コンベヤカバー(上部カバー)
30 自走機本体
31,31' スクレーパ部
31a スクレーパ本体部
31b スクレーパ端辺部
32,33 車輪束
32a,32b,33a,33b 車輪
32C,37 キャタピラ部
35,35' 緩衝部材(サイドローラー)
36,36' コネクタ部
38,38' スクレーパ部
250 制御ユニット
53a,53b 落下物の回収部
【技術分野】
【0001】
本発明は、砂、砕石、石炭、セメントなどのような一般的にはバラ物といわれる物を荷として搬送するのに適するベルトコンベヤ式の運搬装置に係り、より詳細には、搬送される対象物がコンベヤベルト上から落下したときに、その落下物を移動させて除去し回収することができるベルトコンベヤシステムに関するものである。
【背景技術】
【0002】
発電所やリサイクル設備等に使用されているベルトコンベヤ装置では、砂、砕石、石炭、鉄鉱石、石膏、セメントなどのようなバラケ状態となりうる粉粒体状の貨物を、その荷として搬送している。このような粉粒体状の搬送貨物は、輸送中にコンベヤベルトの両側部や前後端部から下方に相当量が落下することが通常であり、コンベヤベルトの下に設けられたアンダーカバーにはこれらの粉粒体状の搬送貨物が落塵物としてたまることとなる。そのため、それら落塵物の移動や除去、また回収や清掃などをしなくてはならず、そのために大きな労力や時間を必要としている。従来では、これらのこぼれ落ちた落塵物は、作業者がスコップ等を用いて移動・回収・清掃等を行っていた。
【0003】
また、ベルトコンベヤ装置によっては、上述のような人手による回収作業の代わりに、これらの落塵物をスクレーパなどによって掻き取って回収するための掻き取り装置を具備しているものもあり、図4は、そのような掻き取り装置を有するベルトコンベヤ装置の従来例を示した図である。
図4(1)〜(4)はベルトコンベヤ装置100を示し、図4(1)はベルトコンベヤ装置100の側面からの構造説明図、図4(2)はベルトコンベヤ装置100の上面図であり、また、図4(3)は図4(1)のA−A断面によるA−A矢視図、図4(4)は図4(1)のB−B断面によるB−B矢視図である。
【0004】
図4のベルトコンベヤ装置100はごく一般的なものであるが、その構造は、左右の長手方向に延びたコンベヤ支持部材の左右端部(図示せず)に、テールプーリとヘッドプーリ(図示せず)を掛け渡し、これらのプーリ間に、多数のキャリヤローラー12(上部ローラー)とリターンローラー12'(下部ローラー)とを配置しておき、テールプーリ→キャリヤローラー12(上部ローラー)→ヘッドプーリ→リターンローラー12'(下部ローラー) →テールプーリのように、無端状にコンベヤベルト(10−10'−10'')がこれら多数のローラー上を移動させて周回するような構造を備えている。
図4(1)において、搬送貨物を載置できる上部のコンベヤベルト10が、キャリヤローラー12(上部ローラー)上を図の右方向または左方向へ移動するが、そのとき、搬送貨物を載置していない下部のコンベヤベルト10'は、リターンローラー12'(下部ローラー)上を上部のコンベヤベルト10'とは逆の方向へ移動するよう構成されている。
【0005】
図4のベルトコンベヤ装置100のコンベヤベルト(10,10')の下部には、アンダーカバー60が敷設されており、上部のコンベヤベルト10から落下してきた搬送貨物の落下物を、そこに受け止めて溜めることができるように構成されている。そして、図4(3)(4)において明らかなように、このアンダーカバー60は、底面部60cとその両側にある壁面部(60a,60b)とを有する断面略U字形の長尺の収納ラック状を成し、上部コンベヤベルト10のローラー支持部材14を支持するための梁状部材13より下側にある構成部材を、このアンダーカバー60内に収容できるような構造となっている。
【0006】
図4のベルトコンベヤ装置100では、コンベヤベルト(10,10')からの落下物を掻き出して回収するための掻き取り装置50を具備している。この掻き取り装置50は、モーター54の動力をチェーン52'から駆動軸があるプーリー40を介してコンベヤチェーン52に伝達しており、このコンベヤチェーン52に、駆動軸があるプーリー40とプーリー41との間で、両端円周で細長扁平形状の軌道で無端状の周回移動動作を行わせるよう構成されている。ここで、周回するコンベヤチェーン52の下側の位置にある部位では、このアンダーカバー60の底面部60cと接触しており、常時接触された状態のまま、コンベヤチェーン52は無端状の周回移動動作または往復移動動作を行う。
【0007】
そして、このコンベヤチェーン52には掻き取りユニット51が連結されており、コンベヤチェーン52の移動動作に従属してこの掻き取りユニット51も移動されるので、このアンダーカバー60の底面部60cに接触させながら掻き取りユニット51を移動させることができる。こうして、所定の方式で移動される掻き取りユニット51は、移動するに際して底面部60c上の落下物を掻き取ってそれを移動方向側に運搬することができる。この図4のベルトコンベヤ装置100では、このアンダーカバー60の底面部(床面部)60cにおいて、その面上に穿設されるようにして下方側に伸びる回収部(53,53')が配設されており、掻き取りユニット51によってその位置まで運搬された落下物を、これら回収部(53,53')に落とし込むことができる。
【0008】
図4で示したようなベルトコンベヤ落下物の掻き取りユニットが備えられた従来のベルトコンベヤ装置は、一般には上述したような掻き取りユニットの掻き板をチェーンで駆動させる方式を用いている。このために、コンベヤベルトの形状によっては取り付け箇所に制限を受ける、長尺のコンベヤ装置ではチェーンが大量に必要となる、チェーンがレールから脱落したりする、などのトラブルが発生することがよくある。さらに、装置が複雑化して大型化しているために、コスト的な負担がかなり大きく、またそれら装置のメンテナンスにも手間と費用がかる、などの問題点も発生している。
【0009】
ベルトコンベヤ装置の技術分野にかかる特許文献としては、例えば、特開平7−337730号公報、特開2001−315948号公報などがある。しかしながら、これらの文献で提示されている落荷回収装置は、装置が複雑で大型化していて多額の設備投資を必要とし、装置の操作やメンテナンスも煩雑で手間がかかり、コスト的な負担が相当に大きく、実用的にはかなり難があるものである。
【特許文献1】特開平7−337730号公報
【特許文献2】特開2001−315948号公報
【発明の開示】
【発明が解決しようとする課題】
【0010】
本発明は前述の問題点に鑑みてなされたものであり、搬送作業を行っている稼動中のベルトコンベヤ上から下部のアンダーカバーにこぼれ落ちた落下物を、より効率的に掻き出して移動させて除去できる落下物除去用走行ユニットと、それら落下物を容易に回収して清掃的な作業をも可能とするベルトコンベヤシステムとを提供することをその目的とし、さらに、設備が複雑化・大型化することがなく、コスト的な負担が少ない落下物除去用走行ユニットおよびベルトコンベヤシステムを提供することをもその目的とする。
【課題を解決するための手段】
【0011】
(1)コンベヤベルト上に対象物を載置して所定の距離を移送させる対象物搬送用ベルトコンベヤ装置において、対象物搬送中に前記コンベヤベルトから落下した物を走行しながら除去するための落下物除去用走行ユニットであって、
前記落下物除去用走行ユニットは、
落下物のある面を走行するための駆動手段および駆動用バッテリーを含む自走手段と、走行しながら落下物を押し出すか掻き出すかするためのスクレーパ部と、を備える。
(2)(1)の落下物除去用走行ユニットにおいて、
前記スクレーパ部は、落下物に当接してこれを押し出すためのスクレーパ本体部と、落下面上の落下物を掻き出すためのスクレーパ端辺部と、を備える。
(3)(1)の落下物除去用走行ユニットにおいて、
前記落下物除去用走行ユニットは、外部装置との無線通信手段を備える。
【0012】
(4)コンベヤベルト上に対象物を載置して所定の距離を移送させる対象物搬送用のベルトコンベヤシステムであって、
対象物の搬送中に前記コンベヤベルトから落下した落下物を、自走式スクレーパ装置によって押し出すか掻き出すかして移動させ、それら移動させた落下物を回収する落下物回収システムを備え、
前記自走式スクレーパ装置には、請求項1〜3いずれかに記載の落下物除去用走行ユニットが適用される。
【0013】
(5)(4)のベルトコンベヤシステムにおいて、
前記コンベヤベルトの下方で落下物のある位置に、前記自走式スクレーパ装置を走行させるための走行路を備える。
(6)(5)のベルトコンベヤシステムにおいて、
前記自走式スクレーパ装置の走行路は、少なくとも片側に側壁を有し、
前記自走式スクレーパ装置は、走行中に前記側壁との接触を緩和するための緩衝手段を有する。
(7)(4)〜(6)のベルトコンベヤシステムにおいて、
前記自走式スクレーパ装置は、所定の走行方式に従って自動的に走行運転するように制御される。
(8)(7)のベルトコンベヤシステムにおいて、
前記自走式スクレーパ装置は、所定の走行方式の1サイクル完了後、次の走行までの間にバッテリーの充電を行う手段を備える。
【発明の効果】
【0014】
本発明による落下物除去用走行ユニットおよびベルトコンベヤシステムによれば、アンダーカバーにこぼれ落ちた落下物を、付属する自走式のスクレーパ装置によって、より簡単で効率的に掻き出して移動させて除去することができ、また、それら落下物を容易に回収して清掃的な作業をも可能とするベルトコンベヤシステムが提供できる。そして、本発明では、装置のある設備全体を複雑化・大型化することがなく、コスト的な負担が少ないベルトコンベヤシステムを提供することができる。
【発明を実施するための最良の形態】
【0015】
以下に、本発明による落下物除去用走行ユニットおよびベルトコンベヤシステムにかかる好適な実施形態を、添付の図1〜図3に基づいて説明する。
図1(1)は、本発明の一実施形態にかかるベルトコンベヤシステム200を断面によって示した構造説明図であって、このシステム200は、落下物除去用走行ユニット300を備えている。また、図1(2)は、落下物除去用走行ユニット200を示す外観斜視図であり、矢印d1とd2はこの走行ユニット200が走行する方向を示す。
【0016】
図1(1)に示すように、本発明によるベルトコンベヤシステム200は、上部にあるコンベヤカバー17と下部にあるアンダーカバー16とによって、各構成部材が包囲されるような構造をなし、その内部には連続するコンベアベルト(10a,10b,10c)を配置して動力によってこれらを無端状に周回移動させ、コンベヤベルト10a上に対象物を載置してその移送が行われる。
ベルトコンベヤシステム200のコンベヤカバー17は、その天井部にあたる上面カバー部17c、その側面部にあたる左右の側面カバー部(17a,17b)とを備え、この上面カバー部17cと左右の側面カバー部(17a,17b)とによって、断面逆U字形状の外枠体を形成していて、その内部が中空となっている。
【0017】
そこで、コンベヤカバー17の左右の側面カバー部(17a,17b)の下段付近に、水平に張り渡した梁状支持部材13を配設し、この梁状支持部材13上には複数のローラー支持部材(14a,14b,14c,14d)を上方に向けて配設し、これらによってキャリアローラ(12a,12b,12c)の中心軸を支持し、コンベヤベルト10aの移動動作に伴って、これらキャリアローラ(12a,12b,12c)を回動させるように構成する。
さらに、左右の側面カバー部(17a,17b)の最下方の位置では、梁状支持部材13に略平行する位置において、両側の別の支持部材(15,15')を介してリターンローラー12dが配設されている。このリターンローラー12dは、アンダーコンベヤカバー16内の上部に配置されており、このリターンローラー12dの上面を下部コンベアベルト10bが移動して通れるよう配置設定がなされている。
【0018】
図1(1)に示すように、本発明によるベルトコンベヤシステム200の下部にあるアンダーコンベヤカバー16は、その最下部にあたる底面部(床面部)16cと、その側面部にあたる左右の側壁カバー部(16a,16b)と、を備え、コンベヤベルトからの落下物はこの底面部16cにおいて滞留する。ここで、アンダーコンベヤカバー16は、左右の側壁カバー部(16a,16b)と底面部(床面部)16cとで、断面U字形状の外枠体を形成していてその内部が中空となっており、左右の側壁カバー部(16a,16b)の上段付近の位置に、下部コンベアベルト10b用のリターンローラー12dが水平に配置されている。そして、リターンローラー12dと底面部16cとで作られる空間には、落下物を移動させて除去させるための落下物除去用ユニットである自走式のスクレーパ装置300が配設され、底面部16c上を走行する。
【0019】
本発明によるスクレーパ装置300は、対象物を搬送中のコンベヤベルトから落下した物を、走行しながら掻き出すか押し出すかして除去することができる落下物除去用走行ユニットであり、本ベルトコンベヤシステム200のアンダーコンベヤカバー16の最下部にある平坦な底面部(床面部)16cを走行路としてこの上を走行することができる。スクレーパ装置300は、直進走行した場合にスムーズな走行ができるように、装置筐体の横幅を、アンダーコンベヤカバー16の左右の側壁カバー部(16a,16b)の幅よりやや小さくなるように設計されるとよい。
【0020】
図1(1)に示すように、スクレーパ装置300は、走行するための駆動手段および駆動用バッテリーを搭載する立方体形状の自走機本体30(装置筐体)を有し、この自走機本体30が進行する方向線に略平行な両側面のうち片側面には車輪束32を、また他の側面に車輪束33を有し、進行方向線の軸に略鉛直する面となるようにスクレーパ部(31と31')を設ける。
このスクレーパ部(31と31')は、走行しながら落下物を押し出すか掻き出すかすることができる部位であり、落下物に当接または押し当ててこれを進行方向へ押し出すためのスクレーパ本体部31aと、落下面上の落下物を掻き出すためのスクレーパ端辺部31bと、を備える。
【0021】
スクレーパ装置300の自走機本体30の片側面にある車輪束32は、車輪32aと車輪32bとそれらをコンベヤベルト式に接続して結合するキャタピラ部32Cとからなり、同じく他方の車輪束33は、車輪33aと車輪33b(図示せず)およびそれらを結合するキャタピラ部33Cとからなり、それぞれの車輪は、車輪32a−車輪33a、車輪32b−車輪33bは共通する車軸によって結合され、スクレーパ装置300は4輪キャタピラ式の自動車のように走行する。
これらの車輪は、クラッチ、スプロケット、チェーンなどの動力伝達機構を介して、モーター等の駆動装置に接続連結されており、スクレーパ装置300が内蔵するCPUを含む制御部によって、停止/走行の動作、速度、方向、位置、距離、時間などが管理され、これらの車輪の動作に伴うスクレーパ装置300の走行が制御される。
【0022】
図2は、本発明による落下物除去用走行ユニットおよびベルトコンベヤシステムにかかる別の実施形態を示す図である。
図2(1)におけるベルトコンベヤシステム210は、スクレーパ装置310と制御ユニット250とを備える。ここでのスクレーパ装置310は、自走機本体の上面にコネクタ部36を備えており、ここを介して外部装置との無線通信することができるし、また、バッテリーの充電もすることができる。
【0023】
ここでの制御ユニット250は、スクレーパ装置310から離間して、例えば、コンベヤカバーまたはアンダーカバーの外側に接する位置に配設することができ、無線通信手段によってスクレーパ装置310を制御することができるし、また、スクレーパ装置310に有線で接続して電源を供給し、バッテリー充電を行うこともできる。また、この制御ユニット250は、CPUまたはシーケンス回路などの電気回路からなり、スクレーパ装置310の制御部に対して制御信号を送り、所望する走行方式に従ってこれを制御することができる。
【0024】
図2(1)において、コンベヤベルトシステム210では、アンダーカバー16'の底面16'cがこのスクレーパ装置310の走行路となっており、走行路16'cの両側は側壁16'aと16'bとなっている。ここで、スクレーパ装置310の横幅寸法は、側壁16'a−16'b間の寸法よりやや小さく設定されており、側壁16'aと側壁16'bにはあまり接触せずに直進する走行が期待される。ところが、落下物の状態によってはスクレーパ装置310の走行が阻害されて、側壁に接触することがあり、走行中に側壁との接触を緩和するための緩衝手段を備えることとした。この図2(2)(3)では、スクレーパ部38の側端から横方向に突出させて緩衝部材(35,35')を配設しており、ここでの緩衝部材(35,35')として、例えば、車輪状で軸心回動のできるサイドローラー機構を用いることとし、このサイドローラー自体の回転により衝撃を緩和すると共に、走行の円滑な推進をも行うことができる。
【0025】
図2(2)のスクレーパ装置310は、サイドローラー35とコネクタ部36を備えているが、車輪の構成は、図1(2)に示したスクレーパ装置300と同じキャタピラ式である。また、図2(3)のスクレーパ装置311は、サイドローラー35'とコネクタ部36'を備えているが、車輪の構成は、図1(2)に示したスクレーパ装置300からキャタピラ部を除いたタイヤ式といわれる構成となっている。このように、本発明によるスクレーパ装置300での車輪を含む走行方式には種々のものがあり、タイヤ式やキャタピラ式については述べてきたが、その他にも、レールを敷設してその上を走行するレール式もあり、ベルトコンベヤシステムの設計に合わせて各種の走行方式を選定すればよい。
【0026】
さて、図3は、本発明の一実施形態によるベルトコンベヤシステム210の概要を示す図であって、側面による構造説明図である。コンベヤベルト(10,10')の下部には、断面U字形のアンダーカバー16'が敷設されており、このアンダーカバー16'の底部は走行路となり、図3の左右方向に走行するスクレーパ装置310が配備されている。このスクレーパ装置310は、スクレーパ部を有することによって、走行路上にある落下物に接触してこれを掻き取りながら移動させて押し出し、進行方向に運搬することができる。図3にあるアンダーカバー16'の底面部である走行路には、そこに開穴または穿設されるようにして下方に伸びる回収部(53a,53b)が配設されており、スクレーパ装置310によってその位置まで運搬された落下物を、これら回収部(53a,53b)に落とし込んで除去することができる。ここでのスクレーパ装置310は、例えば、回収部53aと回収部53bとの口元位置による移動距離Lに従って、走行路を前進移動または後進移動するように制御されたり、往復移動走行やその複数回の繰り返し走行などのように制御されたりし、また、希望される時間間隔や走行時間長さにしたがって走行するよう制御されてもよい。
【0027】
本発明による落下物除去用走行ユニットおよびベルトコンベヤシステムでは、様々な実施形態が考えられるが、例えば、次のような設計が可能である。
・本発明による落下物除去用走行ユニットは、掻板(スクレーパ板)、バッテリー、駆動手段を搭載する自走式の掻き取り装置(スクレーパ装置)とすることができる。
・本発明によるベルトコンベヤシステムでは、スクレーパ装置を充電するためのバッテリー充電装置を、システム内の所定位置に設けることができる。
・本発明によるベルトコンベヤシステムでは、スクレーパ装置を、タイマーによる自動運転させるよう制御することができる。
・本発明によるベルトコンベヤシステムでは、スクレーパ装置を、一定時間毎に運転するよう制御することができる。
【0028】
・本発明によるベルトコンベヤシステムでは、バッテリー充電装置と共に制御盤を設け、一定時間毎に運転信号を送り、運転動作を開始させることができる。
・本発明によるベルトコンベヤシステムでは、スクレーパ装置がコンベヤ端部または回収部に達したことを、リミットスイッチで検知し、逆方向に走行運転することができる。
・本発明によるベルトコンベヤシステムでは、スクレーパ装置が所定の定位置に戻ったことをリミットスイッチなどによって検知して、そのスクレーパ装置に充電を開始することができる。このようにして、本発明による自走式のスクレーパ装置は、バッテリー充電装置と制御盤によって、所定の走行方式の1サイクル完了後、次の走行までの間にバッテリーの充電を行うよう制御されることが可能である。
・スクレーパ装置の走行方式は、タイヤ式、キャタピラ式、レール式などがあり、ベルトコンベヤシステムに合わせて選定することができる。
【産業上の利用可能性】
【0029】
本発明による落下物除去用走行ユニットおよびベルトコンベヤシステムは、発電所やリサイクル設備等に使用されている粉粒体状貨物を搬送するベルトコンベヤ装置において、基本的なベルトコンベヤ機構は変えることなく、スクレーパ装置と付属コントローラーとを付加することによって容易に適用することができる。このように、本発明を既存のベルトコンベヤ装置に適用するにあたっては、ベルトコンベヤ設備の大きな改造や変更が必要なく、メンテナンスも楽にできるので、多額の資金投資も必要としないという長所があり、従来では、スコップ等を用いて落下物の移動・回収・清掃を行っていた作業者らの労力や時間を大幅に改善することができるので、ベルトコンベヤ産業上の利用可能性は極めて大きい。
【図面の簡単な説明】
【0030】
【図1】図1(1)は、本発明の一実施形態にかかるベルトコンベヤシステム200を断面によって示した構造説明図であり、また、図1(2)は、本発明の一実施形態にかかる落下物除去用走行ユニット200を示す外観斜視図である。
【図2】図2(1)は、本発明の一実施形態にかかるベルトコンベヤシステム210を断面によって示した構造説明図であり、また、図2(2)は、本発明の一実施形態にかかる落下物除去用走行ユニット310を示す外観斜視図、図2(3)は、本発明の一実施形態にかかる落下物除去用走行ユニット311を示す外観斜視図である。
【図3】本発明の一実施形態にかかるベルトコンベヤシステム210の側面による構造説明図である。
【図4】図4(1)〜(4)は従来のベルトコンベヤ装置100を説明するための図であって、図4(1)はベルトコンベヤ装置100の側面による構造説明図、図4(2)はベルトコンベヤ装置100の上面図であり、また、図4(3)は図4(1)のA−A断面によるA−A矢視図、図4(4)は図4(1)のB−B断面によるB−B矢視図である。
【符号の説明】
【0031】
200,210 ベルトコンベヤシステム
300,310,311 落下物除去用走行ユニット(自走式スクレーパ装置)
d1,d2 走行ユニット300の走行方向
10a,10b,10c,10,10' コンベヤベルト
12a,12b,12c キャリアローラー(上部ローラ)
12d リターンローラー(下部ローラ)
13 梁状支持部材
14a,14b,14c,14d ローラー支持部材
16 アンダーコンベヤカバー(下部カバー)
16a,16b 側壁カバー部
16c 底面部(床面部、走行路)
17 上部コンベヤカバー(上部カバー)
30 自走機本体
31,31' スクレーパ部
31a スクレーパ本体部
31b スクレーパ端辺部
32,33 車輪束
32a,32b,33a,33b 車輪
32C,37 キャタピラ部
35,35' 緩衝部材(サイドローラー)
36,36' コネクタ部
38,38' スクレーパ部
250 制御ユニット
53a,53b 落下物の回収部
【特許請求の範囲】
【請求項1】
コンベヤベルト上に対象物を載置して所定の距離を移送させる対象物搬送用ベルトコンベヤ装置において、対象物搬送中に前記コンベヤベルトから落下した物を走行しながら除去するための落下物除去用走行ユニットであって、
前記落下物除去用走行ユニットは、
落下物のある面を走行するための駆動手段および駆動用バッテリーを含む自走手段と、走行しながら落下物を押し出すか掻き出すかするためのスクレーパ部と、を備えることを特徴とする落下物除去用走行ユニット。
【請求項2】
請求項1に記載の落下物除去用走行ユニットにおいて、
前記スクレーパ部は、落下物に当接してこれを押し出すためのスクレーパ本体部と、落下面上の落下物を掻き出すためのスクレーパ端辺部と、を備えることを特徴とする落下物除去用走行ユニット。
【請求項3】
請求項1に記載の落下物除去用走行ユニットにおいて、
前記落下物除去用走行ユニットは、外部装置との無線通信手段を備える、ことを特徴とする落下物除去用走行ユニット。
【請求項4】
コンベヤベルト上に対象物を載置して所定の距離を移送させる対象物搬送用のベルトコンベヤシステムであって、
対象物の搬送中に前記コンベヤベルトから落下した落下物を、自走式スクレーパ装置によって押し出すか掻き出すかして移動させ、それら移動させた落下物を回収する落下物回収システムを備え、
前記自走式スクレーパ装置には、請求項1〜3いずれかに記載の落下物除去用走行ユニットが適用される、ことを特徴とするベルトコンベヤシステム。
【請求項5】
請求項4に記載のベルトコンベヤシステムにおいて、
前記コンベヤベルトの下方で落下物のある位置に、前記自走式スクレーパ装置を走行させるための走行路を備える、ことを特徴とするベルトコンベヤシステム。
【請求項6】
請求項5に記載のベルトコンベヤシステムにおいて、
前記自走式スクレーパ装置の走行路は、少なくとも片側に側壁を有し、
前記自走式スクレーパ装置は、走行中に前記側壁との接触を緩和するための緩衝手段を有する、ことを特徴とするベルトコンベヤシステム。
【請求項7】
請求項4〜6いずれかに記載のベルトコンベヤシステムにおいて、
前記自走式スクレーパ装置は、所定の走行方式に従って自動的に走行運転するように制御される、ことを特徴とするベルトコンベヤシステム。
【請求項8】
請求項7に記載のベルトコンベヤシステムにおいて、
前記自走式スクレーパ装置は、所定の走行方式の1サイクル完了後、次の走行までの間にバッテリーの充電を行う手段を備える、ことを特徴とするベルトコンベヤシステム。
【請求項1】
コンベヤベルト上に対象物を載置して所定の距離を移送させる対象物搬送用ベルトコンベヤ装置において、対象物搬送中に前記コンベヤベルトから落下した物を走行しながら除去するための落下物除去用走行ユニットであって、
前記落下物除去用走行ユニットは、
落下物のある面を走行するための駆動手段および駆動用バッテリーを含む自走手段と、走行しながら落下物を押し出すか掻き出すかするためのスクレーパ部と、を備えることを特徴とする落下物除去用走行ユニット。
【請求項2】
請求項1に記載の落下物除去用走行ユニットにおいて、
前記スクレーパ部は、落下物に当接してこれを押し出すためのスクレーパ本体部と、落下面上の落下物を掻き出すためのスクレーパ端辺部と、を備えることを特徴とする落下物除去用走行ユニット。
【請求項3】
請求項1に記載の落下物除去用走行ユニットにおいて、
前記落下物除去用走行ユニットは、外部装置との無線通信手段を備える、ことを特徴とする落下物除去用走行ユニット。
【請求項4】
コンベヤベルト上に対象物を載置して所定の距離を移送させる対象物搬送用のベルトコンベヤシステムであって、
対象物の搬送中に前記コンベヤベルトから落下した落下物を、自走式スクレーパ装置によって押し出すか掻き出すかして移動させ、それら移動させた落下物を回収する落下物回収システムを備え、
前記自走式スクレーパ装置には、請求項1〜3いずれかに記載の落下物除去用走行ユニットが適用される、ことを特徴とするベルトコンベヤシステム。
【請求項5】
請求項4に記載のベルトコンベヤシステムにおいて、
前記コンベヤベルトの下方で落下物のある位置に、前記自走式スクレーパ装置を走行させるための走行路を備える、ことを特徴とするベルトコンベヤシステム。
【請求項6】
請求項5に記載のベルトコンベヤシステムにおいて、
前記自走式スクレーパ装置の走行路は、少なくとも片側に側壁を有し、
前記自走式スクレーパ装置は、走行中に前記側壁との接触を緩和するための緩衝手段を有する、ことを特徴とするベルトコンベヤシステム。
【請求項7】
請求項4〜6いずれかに記載のベルトコンベヤシステムにおいて、
前記自走式スクレーパ装置は、所定の走行方式に従って自動的に走行運転するように制御される、ことを特徴とするベルトコンベヤシステム。
【請求項8】
請求項7に記載のベルトコンベヤシステムにおいて、
前記自走式スクレーパ装置は、所定の走行方式の1サイクル完了後、次の走行までの間にバッテリーの充電を行う手段を備える、ことを特徴とするベルトコンベヤシステム。
【図1】


【図2】
【図3】
【図4】
【図2】
【図3】
【図4】
【公開番号】特開2006−27805(P2006−27805A)
【公開日】平成18年2月2日(2006.2.2)
【国際特許分類】
【出願番号】特願2004−208497(P2004−208497)
【出願日】平成16年7月15日(2004.7.15)
【出願人】(596133119)中電プラント株式会社 (101)
【公開日】平成18年2月2日(2006.2.2)
【国際特許分類】
【出願日】平成16年7月15日(2004.7.15)
【出願人】(596133119)中電プラント株式会社 (101)
[ Back to top ]