
蒸気タービンの弁組立体を監視するための方法及び装置
【課題】本出願は、蒸気タービン(100)の弁組立体(110)を監視するための装置及び方法を提供する。本出願の1つの実施形態では、弁組立体(110)を監視する方法を提供する。
【解決手段】最初に、作動に先立つ少なくとも1つの弁組立体(110)の振動特性を測定することができる。次に、弁組立体(110)の作動中にその弁組立体(110)の挙動を監視し、次にその弁組立体の挙動を作動に先立って判定した振動特性と比較することができる。作動中に監視した弁組立体(110)の挙動を作動に先立って測定した弁組立体(110)の特性と比較することにより、作動中に弁組立体(110)が受けた応力レベルを推定することを可能にすることができる。
【解決手段】最初に、作動に先立つ少なくとも1つの弁組立体(110)の振動特性を測定することができる。次に、弁組立体(110)の作動中にその弁組立体(110)の挙動を監視し、次にその弁組立体の挙動を作動に先立って判定した振動特性と比較することができる。作動中に監視した弁組立体(110)の挙動を作動に先立って測定した弁組立体(110)の特性と比較することにより、作動中に弁組立体(110)が受けた応力レベルを推定することを可能にすることができる。
【発明の詳細な説明】
【技術分野】
【0001】
本出願は、総括的には弁組立体に関し、より具体的には、蒸気タービン内で使用する弁組立体を監視するための方法及びシステムに関する。
【背景技術】
【0002】
蒸気タービンは、加圧蒸気の運動又は熱エネルギーを有用な機械エネルギーに変換する。一般的に、蒸気は蒸気発生器又はボイラ内で生成され、次に停止弁及び制御弁を通ってノズル内に流れ、蒸気は、ロータ組立体を駆動する。次にロータ組立体は、発電機を駆動して電気エネルギーを発生することができる。停止弁及び制御弁は、ノズル内への蒸気の流れを制御することによって、蒸気タービンの作動を制御する。制御弁は一般的に、正常作動レベルの間にノズル内への蒸気の流入を制御する。停止弁は一般的に、正常作動時には開放状態に保持され、即時運転停止が必要な場合に閉鎖される。幾つかの用途では、制御弁及び停止弁は、単一のユニットに統合される。
【0003】
様々な作動レベルにおいて、蒸気タービンの弁組立体内の及び該弁組立体の周りの流れ特性は、振動を招く可能性がある不安定性を引き起こすおそれがある。過度な振動は、望ましくなく、構成要素の疲労及び弁組立体の早期故障を招く可能性がある。作動時に使用中の弁組立体は、弁組立体自体の振動から生じる振動特性並びに弁組立体内の及び該弁組立体の周りの流れから生じる振動特性を示すことが知られており、それらは、それぞれ構造振動及び音響振動と呼ばれることが多い。弁組立体は、個々の振動作用によって、並びに構造及び音響振動数とモード形状との間の相互作用によって影響を受ける可能性がある。
【0004】
振動数の相互作用を補正するための現行の解決方法は、それらの構造特性と音響特性との間に十分な分離を達成すると予測される弁組立体を設計することである。しかしながら、弁組立体を使用する可能性がある用途の数が増すにつれて、それらの作動条件は予測し難くなる。さらに、弁組立体に対する要求は益々増大し、それら弁組立体を一層厳しくかつより多様な条件において作動させるようになる。従って、構造振動特性と音響振動特性との間に十分な分離を与えることが益々困難になり、それによって弁組立体に加わる応力、従って受ける疲労の完全な把握が妨げられている。
【特許文献1】米国特許第6,070,605号公報
【特許文献2】米国特許第6,655,409号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
従って、蒸気タービン内で使用する弁組立体の振動特性をより良く把握することに対する願望がある。さらに、使用状態にある弁組立体の振動特性と比較して、使用しようとする様々な作動状態時における弁組立体の振動特性についての把握を得ることが好ましい。
【課題を解決するための手段】
【0006】
従って、本出願は、蒸気タービンの弁組立体を監視するための装置及び方法を提供する。本出願の1つの実施形態では、弁組立体を監視する方法を提供する。最初に、作動に先立つ少なくとも1つの弁組立体の振動特性を測定することができる。次に、弁組立体の作動中にその弁組立体の挙動を監視し、次にその弁組立体の挙動を作動に先立って判定した振動特性と比較することができる。作動中に監視した弁組立体の挙動を作動に先立って測定した弁組立体の特性と比較することにより、作動中に弁組立体が受けた応力レベルを推定することを可能にすることができる。
【0007】
別の実施形態では、蒸気タービンの弁組立体を監視するためのシステムを提供する。本システムは、少なくとも1つの弁組立体に結合された少なくとも1つの特性アナライザを含むことができ、1つ又は複数の特性アナライザは、作動に先立って弁組立体の振動特性を測定し、その振動特性をメモリ内に記憶するようにプログラムすることができる。作動中に弁組立体の挙動を監視するために、少なくとも1つの監視装置を弁組立体に結合することができる。少なくとも1つの制御ユニットを、1つ又は複数の監視装置に結合することができ、制御ユニットは、弁組立体の監視した挙動を監視装置から受け、メモリから振動特性を検索し、作動中における監視挙動を作動に先立って測定した振動特性と比較し、かつ作動に先立つ振動特性に対する作動中の挙動の比較に基づいて、作動中に弁組立体が受けた応力レベルを推定するようにプログラムされる。
【0008】
さらに別の実施形態では、蒸気タービン内で使用する少なくとも1つの弁組立体を監視する方法を提供する。最初に、弁組立体のベースライン特性を、作動に先立って複数の作動状態において測定することができる。ベースライン特性を測定するステップは、弁組立体の音響空間及び構造体の固有振動数を測定するステップと、固有振動数の少なくとも1つについて弁組立体に作用する振動圧力分布及び振動圧力振幅を判定するステップと、1つの弁組立体に対して強制応答解析を行うステップとを含むことができ、強制応答解析は、振動圧力分布及び振動圧力振幅を考慮することを含むことができる。弁組立体の挙動は、作動中に監視することができ、この挙動には、弁組立体の振動数、弁組立体の振動振幅、弁組立体の弁リフト、蒸気圧力、及び蒸気温度が含まれる。次に、弁組立体の作動中の挙動は、弁組立体のベースライン特性と比較することができる。本方法は、ベースライン特性に対する作動中の挙動の比較に基づいて、弁組立体の残余有効寿命を予測することを可能にすることができる。
【0009】
本出願のこれらの及びその他の特徴は、幾つかの図面及び特許請求の範囲と関連させて以下の詳細な説明を読む時、当業者には明らかになるであろう。
【発明を実施するための最良の形態】
【0010】
次に以下において、全てではないが幾つかの実施形態を示した添付図面を参照して、本出願について一層完全に説明する。実際には、本出願の主題は、多くの異なる形態で具現化することができ、本明細書に記載した実施形態に限定されるものと解釈すべきではなく、むしろこれらの実施形態は、本開示が適用法的要求を満たすようにするために示している。全体を通して、同じ参照符号は同様な要素を指している。
【0011】
本出願では、本明細書に記載した少なくとも1つの実施形態によるシステム、方法、装置及びコンピュータプログラム製品のブロック図を説明している。ブロック図の各ブロック及びブロック図内のブロックの組合せは、それぞれ少なくとも部分的にはコンピュータプログラム命令によって実行することができることを理解されたい。これらのコンピュータプログラム命令は、汎用コンピュータ、専用コンピュータ、専用ハードウエアベースのコンピュータ、又はその他のプログラム可能データ処理装置にロードしてマシンを作り出して、コンピュータ又はその他のプログラム可能データ処理装置上で実行される命令が、以下の記載において詳細に説明するブロック図の各ブロック及びブロック図内のブロックの組合せの機能を実行するための手段を作り出すことができる。
【0012】
これらのコンピュータプログラム命令はまた、コンピュータ又はその他のプログラム可能データ処理装置を特定の方法で機能するように命令することができるコンピュータ可読メモリ内に記憶させて、コンピュータ可読メモリ内に記憶した命令が、1つ又は複数のブロック内に指定した機能を実行する命令手段を含む製品を作り出すようにすることができる。コンピュータプログラム命令はまた、コンピュータ又はその他のプログラム可能データ処理装置にロードして一連の動作ステップを該コンピュータ又はその他のプログラム可能データ処理装置上で実行して、コンピュータ又はその他のプログラム可能データ処理装置上で実行される命令が1つ又は複数のブロック内に指定した機能を実行するステップを行うようなコンピュータ実行の処理方法を作り出すことができる。
【0013】
本明細書に記載したシステム及び方法は、コンピュータのオペレーティングシステム上で動作するアプリケーションプログラムにより実行することができる。それらシステム及び方法はまた、ハンドヘルド装置、マルチプロセッサシステム、マイクロコンピュータベースの又はプログラム可能なコンシューマ電子機器、マルチコンピュータ、メインフレームコンピュータ等々を含むその他のコンピュータシステム構成を用いて実施することもできる。
【0014】
本明細書に記載したシステム及び方法の構成要素であるアプリケーションプログラムには、一定の抽象データ型を実行しまた一定のタスク又は動作を行うル−チン、プログラム、構成要素、データ構造等々を含むことができる。分散コンピュータ環境においては、アプリケーションプログラム(全体としての又は一部としての)は、局部メモリ又はその他の記憶装置内に置くことができる。それに加えて又はそれに代えて、アプリケーションプログラム(全体としての又は一部としての)は、通信ネットワークを介してリンクされた遠隔処理装置によってタスクが遂行される環境を可能にする遠隔メモリ又は記憶装置内に置くことができる。以下において、幾つかの図面を通して同じ参照符号が同様な要素を示している図を参照して、例示的な実施形態について説明する。
【0015】
本出願の1つの態様によると、蒸気タービンの弁組立体に対する疲労、より具体的には高サイクル疲労の影響を判定することができる。これらのシステム及び方法は、弁組立体構造及び関連する音響空間に対する振動作用のベースライン特性を判定するために使用することができる。ベースラインは、作動中に弁組立体が示す監視挙動との比較のために使用することができる。従って、把握ベースライン特性と作動中に弁組立体が示す挙動との組合せは、このシステムがオペレータに対して、弁組立体に加わる応力、従って弁組立体の摩耗及び故障するまでの推定時間に関してより良く情報を与えることを可能にする。
【0016】
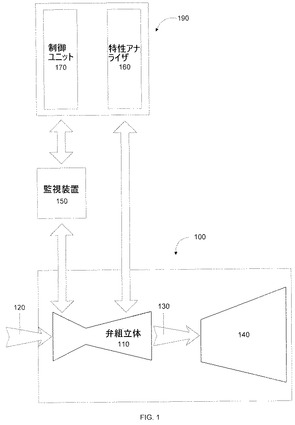
図1は、蒸気タービンシステム内の蒸気タービン100をブロック図によって示している。蒸気は、弁組立体110に連結した1つ又はそれ以上の蒸気入口120を通して蒸気タービン100に流入することができ、弁組立体110は、1つ又はそれ以上の蒸気出口130を通して1つ又はそれ以上のロータ組立体140に流入する蒸気の流入及びボリュームを制御することができる。弁組立体110は、単一の組立体として制御弁及び停止弁を含むことができる。それに代えて、制御弁及び停止弁は、別々の組立体として設けることができる。弁組立体110は、蒸気の流れを制御する。弁組立体110が開いている場合には、蒸気はそれを通ってロータ140に流れることが可能になることになる。それに代えて、弁組立体110が閉じている場合には、蒸気はそれを通ってロータ140に流れることが許されないことになる。蒸気タービン100は、本明細書に記載した構成要素の1つよりも多く含むことができることが理解される。例えば、複数の弁組立体110は、互いに直列又は並列に作動するように構成することができ、また/或いはそれら弁組立体110は、完全アーク又は部分アーク流入型として作動するように構成することができる。
【0017】
1つ又はそれ以上の監視装置150は、弁組立体110と統合して、弁組立体110の様々なパラメータの監視を可能にすることができる。例えば、監視装置150の1つは、弁組立体110の振幅及び振動数のような振動特性を測定するために使用する加速度計とすることができる。監視装置150の1つの別の例は、弁組立体110に生じる歪みを測定するために使用する歪み計又は動的歪み計とすることができる。また、監視装置150によって監視されるパラメータのその他の実施例には、蒸気圧力、蒸気温度、弁リフト、変位、歪み、加速度又は作動時間を含むことができる。本明細書で述べた作動パラメータ以外の蒸気タービン100の作動パラメータを監視装置150によって監視することができることを、当業者には理解されたい。図3及び図5に付随した記述は、制御ユニット170及び監視装置150の動作に関してさらに詳細に説明している。
【0018】
1つ又はそれ以上のランタイム制御ユニット170は、監視装置150から測定データを受け、記憶しかつ処理することができる。1つ又はそれ以上の特性アナライザ160は、それが作動状態になる前に弁組立体110の特性を取得するために使用することができる。例えば、特性アナライザ160は、有限要素解析、非定常計算流体力学解析、並びに当技術分野において公知であるその他のフィールド又は実験室テストを行う能力を含むことができる。図3及び図4に付随した記述は、特性アナライザ160の動作に関してさらに詳細に説明している。最後に、制御ユニット170及び特性アナライザ160は、1つ又はそれ以上のコンピュータ制御監視システム190上で動作させることができる。図2に付随した記述は、コンピュータ制御監視システム190の動作に関してさらに詳細に説明している。
【0019】
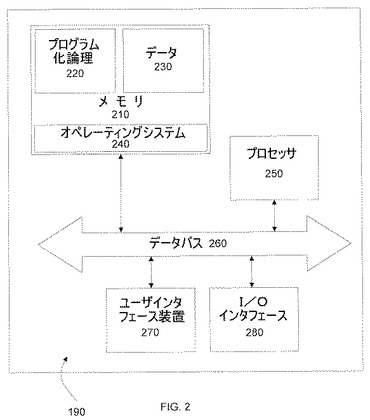
図2は、本出願の例示的な実施形態による、弁組立体110を特徴付けかつ監視するために使用するコンピュータ制御監視システム190のブロック図を示している。より具体的には、コンピュータ制御監視システム190の要素は、制御ユニット170及び特性アナライザ160の機能を実行するために使用することができる。コンピュータ制御監視システム190は、プログラム化論理220(例えば、ソフトウエア)を記憶するメモリ210を含むことができ、また測定データ230を記憶することができる。メモリ210はまた、オペレーティングシステム240を含むことができる。プロセッサ250は、オペレーティングシステム240を利用してプログラム化論理220を実行することができ、またそうすることで、測定データ230を利用することができる。データバス260は、メモリ210及びプロセッサ250間の通信を行うことができる。ユーザは、キーボード、マウス、コントロールパネル、或いはコンピュータ制御監視システム190に又はコンピュータ制御監視システム190からデータを通信することができるあらゆるその他の装置のようなユーザインタフェース装置270を介してコンピュータ制御監視システム190とインタフェースをとることができる。例えば、ユーザインタフェース装置270は、蒸気タービン100の作動中に閾値振動レベルを超えたという信号を、ユーザに対して表示することができる。ユーザインタフェース装置270はまた、弁組立体110の推定消費寿命又は残余寿命をユーザに表示することもできる。コンピュータ制御監視システム190は、蒸気タービン100との統合に先立って、入出力(I/O)インタフェース280を介して蒸気タービン100と通信状態になりまた弁組立体110と通信状態になることができる。より具体的には、コンピュータ制御監視システム190の1つ又はそれ以上は、1つ又は複数の監視装置150を介して弁組立体110を監視することのような制御ユニット170の実行処理を行うことができる。また、コンピュータ制御監視システム190の1つ又はそれ以上はまた、蒸気タービン100の作動に先立って、特性アナライザ160の実行処理を行うことができる。加えて、ロータ組立体140又は複数のその他の蒸気タービン100のようなその他の外部装置は、I/Oインタフェース280を介してコンピュータ制御監視システム190と通信状態にすることができることを理解されたい。この図示した実施形態では、コンピュータ制御監視システム190は、蒸気タービン100に対して遠方に設置することができるが、蒸気タービン100と同位置に設置するか、或いは蒸気タービン100と統合することさえできる。さらに、コンピュータ制御監視システム190及びそれによって実施されるプログラム化論理220は、ソフトウエア、ハードウエア、又はそれらのあらゆる組合せを含むことができる。複数のコンピュータ制御監視システム190を使用することができ、それによって本明細書に記載した異なる特徴を1つ又はそれ以上の異なるコンピュータ制御監視システム190上で実行できることも理解されたい。
【0020】
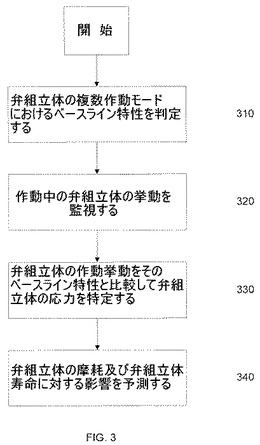
図3〜図5は、本出願の実施形態がそれによって動作することができる方法を示した例示的なフロー図である。図3は、本出願の例示的実施形態による、弁組立体110のベースライン特性及び作動挙動を判定するために使用する特性アナライザ160及び制御ユニット170の基本的動作の例示的フロー図である。ブロック310において、特性アナライザ160は、1つ又はそれ以上の作動状態における弁組立体110のベースライン特性を判定することができる。特性アナライザ160によって解析される作動状態は、例えばコールド始動、ホット始動、ウォーム始動、負荷移行及び運転停止とすることができる。
【0021】
上記のように、特性アナライザ160は、1つ又はそれ以上のコンピュータ制御監視システム190上で動作させることができ、またメモリ210内にプログラム化論理220として記憶された1つ又はそれ以上のプログラムモジュールを含むことができる。これらのプログラムモジュールは、ブロック310における解析中に使用することができ、有限要素解析、非定常計算流体力学(「非定常CFD」)解析、或いは当技術分野において公知であるその他の実験室テスト又はフィールドテストを行うことができる。特性アナライザ160の動作及び特性アナライザ160によって実施される方法は、図4に付随した記述において一層完全に詳述する。
【0022】
ベースライン特性を判定した後に、弁組立体110は、図1を参照して説明したように制御ユニット170と通信状態になった1つ又はそれ以上の監視装置150を使用して、ブロック320で示すように、蒸気タービン100内での作動中に監視することができる。制御ユニット170の動作及び制御ユニット170によって実施される方法は、図5に付随した記述において一層完全に詳述する。
【0023】
ブロック330において、制御ユニット170によって測定した作動挙動は、特性アナライザ160によって判定したベースライン特性と比較して、作動中に弁組立体110に加わる応力を特定することができる。より具体的には、ブロック320において測定した加速度及び振動数データのような作動挙動並びにブロック310におけるベースライン特性により特定した音響刺激は、数値アルゴリズムにより、作動振動振幅を予測すること、従って作動中に弁組立体110が受ける応力を予測することを可能にする。
【0024】
最後に、ブロック340に示すように、弁組立体110に対する影響の可能性を把握することにより、オペレータは、高サイクル疲労の望ましくない影響を予測することが可能になる。より具体的には、ブロック330において推定した作動応力を次に解析して、記録した作動中における弁組立体110の消費寿命を計算することができる。消費寿命は、マイナーの法則、或いは対数分布のような確率分布、ワイブル分布又は当技術分野において一般に公知であるその他の分布などのその他の応力予測法を用いて計算することができる。次に消費寿命は、後の参照及び演算のためにメモリ210内に記憶することができる。さらに、消費寿命の計算値を累積的に加算して、総消費寿命の測定値を得ると共に、弁組立体110の残余の使用可能寿命を推定することができる。ブロック340において行った判定は、リアルタイム又は準リアルタイムに行うことができ、また主として過去のデータに基づいて行うことができる。
【0025】
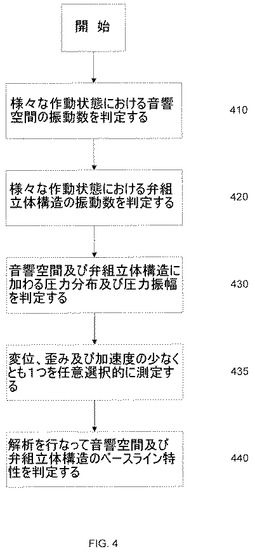
図4は、本出願の態様による、特性アナライザ160によって行って、1つ又はそれ以上の作動状態における弁組立体110のベースライン特性を判定することができるステップの例示的なフロー図である。ベースライン特性は、作動に先立って一般的にはベンチテスト又は実験室テストで判定することができるが、当技術分野において公知であるフィールドテスト又はこれと同様なものを使用して、図4に記載した特性を判定することもできる。さらに、ベースライン特性は、それに限定されないが、以下の作動状態、すなわちコールド始動、ホット始動、ウォーム始動、負荷移動及び運転停止について判定することができる。これらの作動状態の実施例にも拘わらず、本明細書に記載したシステム及び方法は、十分なベースライン測定値を得るのに作動状態全域の測定を必要としないことを理解されたい。さらに、図4を参照して説明した測定の各々は、ベースライン特性の十分な把握を得るために行う必要はなく、従って記載した測定のサブセットでベースラインの把握には十分であることを理解されたい。
【0026】
ブロック410において、弁組立体110の音響空間の固有振動数は、1つ又はそれ以上の作動状態について測定することができる。音響空間は、作動中にそれを通して蒸気が流れる弁組立体110の内部空洞として最も良く定めることができる。より具体的には、音響空間の固有振動数は、有効数値解析を用いて判定することができる。これは一般的に、例えば、音響空間の形状寸法がモデル化されまた音響周波数(振動数)及び正規化圧力分布が市販の有限要素解析ツールを使用して判定される有限要素解析を行うことを含む。このステップの目標は、弁組立体110内の制御弁を囲む音響空間の振動数をより正確に把握することである。さらに、例えば、境界要素法、空間内にマイクロフォンを設置するような実地実測法、又は当技術分野において公知である同様な方法のような幾つかのその他の数値方法を使用してこの目標を達成することができることが理解されたい。従って、励振させることができる可能性な構造モードは、例えば最大10kHzのような一定の振動数まで予測することができる。
【0027】
ブロック420において、弁組立体110構造の固有振動数は、1つ又はそれ以上の作動状態において判定することができる。固有振動数は、加速度計のような監視装置150と同様な測定装置を使用して測定することができる。音響特性及び構造特性の両方を測定することは、弁組立体110が受ける応力に大きな影響を与えかつその残余寿命を予測するのを助けることができる発生可能性がある音響−構造振動相互作用を特定するのを可能にする。
【0028】
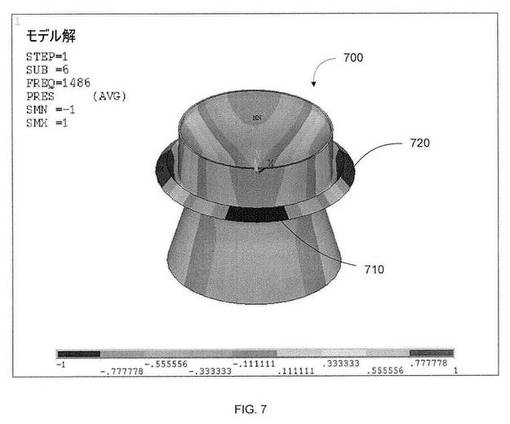
ブロック430に示すように、弁組立体110の音響空間及び構造体に加わる圧力の振幅及び分布を判定することができる。例えば、ブロック430において、当技術分野において公知である非定常CFD解析或いはその他の実験室テスト又はフィールドテストを使用して、圧力分布及び相対振幅を特定することができる。一層詳細に後述する図7は、特定の振動数、モード及び作動状態において弁組立体110に対して行った非定常CFD解析の例示的な出力を示している。
【0029】
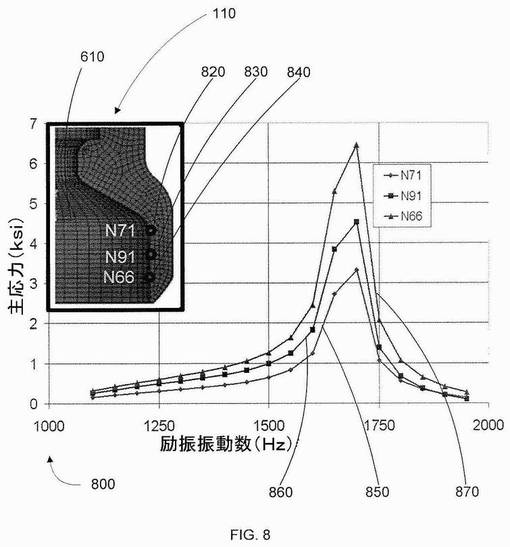
ブロック430において判定した圧力分布及び振幅は次に、ブロック440に記載した強制応答解析に対して入力としてすることができる。強制応答解析は、有限要素解析法とすることができ、それによって、弁組立体110上の点において異なる作動振動数について応力応答を判定することができる。一層詳細に後述する図8は、弁組立体110上のサンプル位置についての強制応答解析の例示的な出力を示している。ブロック440において判定した測定応力応答振幅は、図3のブロック320において測定しかつ図3のブロック330及び340の上記説明において一層完全に論じた弁組立体110の作動挙動と比較するために使用することができる。
【0030】
ブロック435に示すように、弁組立体110の変位、歪み及び加速度の少なくとも1つは、作動に先立って任意選択的に測定して、弁組立体110のベースライン作動の特性をさらに得ることができる。歪みは、歪み計、動的歪み計又は当技術分野において公知である同様なもののような監視装置150を使用して測定することができる。加速度は、加速度計又は当技術分野において公知である同様なもののような監視装置150を使用して測定することができる。変位は、歪み計及び加速度計から得られた測定値と、動的歪み計又は当技術分野において公知である同様なものから得られた測定値との組合せを使用して測定することができる。これらの測定値を得ることは、このステップにおいて任意選択的であり、本出願において開示した主題を実行するために必須ではない。
【0031】
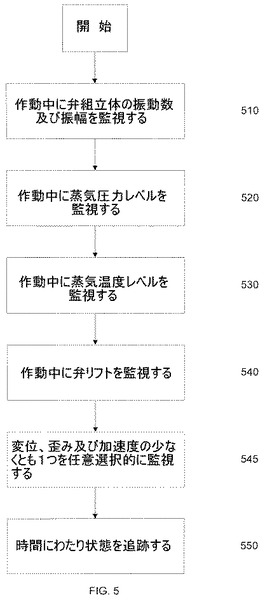
図5は、制御ユニット170によって行って、蒸気タービン100内において作動中に弁組立体110を監視することができるステップの例示的なフロー図である。ブロック510において、作動中の弁組立体110の振動数及び相対振幅を監視することができる。より具体的には、加速度計又は当技術分野において一般に公知である同様なもののような1つ又はそれ以上の監視装置150は、弁組立体110に取り付けかつ制御ユニット170と通信状態にすることができる。制御ユニット170は、監視装置150によって提供された信号を読み取りかつそれらの信号を振動数及び相対振幅に変換するソフトウエアを含むことができる。ブロック520において、弁組立体110を囲む蒸気圧力レベルは、当技術分野において公知である圧力検知装置を使用して監視することができる。ブロック530において、弁組立体110を囲む蒸気温度レベルは、当技術分野において公知である温度検知装置を使用して監視することができる。弁組立体110の弁リフトは、ブロック540に記載したように、線形可変変位変換器によって、又は当技術分野において一般に公知であるその他の方法によって、測定することができる。
【0032】
上記の状態の全ては、ブロック550に記載したように、時間にわたって測定しかつ追跡することができる。時間にわたってこれらの状態を追跡することにより、どれほど長く弁組立体110が変動状態に曝されかについてより完全な具体像が得られる。さらに、時間にわたって弁組立体110の作動状態を追跡することにより、図3のブロック340に記載したように、装置の消費寿命を推定することが可能になる。上記の状態は単に例示のためのものであること、またその他の状態も測定することができかつ弁組立体110の作動挙動の解析に含ませることができることは当業者には明らかであろうことを理解されたい。例えば、ブロック545に示すように、応力、歪み及び変位の少なくとも1つは、図4のブロック435において任意選択的に測定したベースライン測定値と後で比較するために、作動中に監視することができる。
【0033】
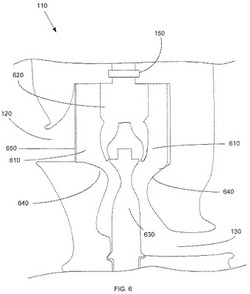
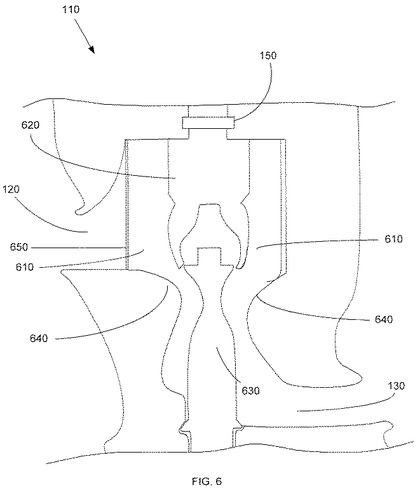
図6は、本明細書に記載した本方法及びシステムの実施中に監視することができる弁組立体110の例示的な実施例を示している。音響空間610は、弁組立体110の内部空洞である。この例示的な弁組立体では、制御弁620及び停止弁630は、単一のユニットに統合される。作動中に、制御弁620は、蒸気入口120から環状スクリーン650及び音響空間610を通って蒸気出口130までの流れを許すように開放状態に保持することができる。流量は、弁座640に対する制御弁620の底面の近接度によって制御することができ、弁座640に対して制御弁620を着座させることによって流れを停止させる。さらに、流れを即座に停止させるために、弁座640に対して停止弁630を急速に着座させることができる。音響空間610の振動特性と制御弁620及び停止弁630を含む弁組立体110の振動特性との間の相互作用は、弁組立体110の挙動全体に影響を与える可能性がある。例えば制御弁620の作動挙動を監視するために、制御弁の弁ステム上に加速度計のような監視装置150を配置することができる。同様に、図示していないが、停止弁の弁ステム上に監視装置150を配置して、停止弁630の作動挙動を監視することができる。
【0034】
図7は、図4のブロック430におけるのと同様に、非定常CFD解析を用いて判定することができるような正規化圧力分布の例示的な実施例を示している。例示的な弁組立体110の音響空間モデル700を示している。非定常CFD解析の図式出力は、負の正規化圧力710から正の正規化圧力720まで徐々に移行する正規化圧力分布の勾配を示している。音響空間モデル700上に示した陰影付き区域は、正の正規化圧力720によって表した最大圧よりも小さくかつ負の正規化圧力710によって表した最小圧よりも大きい相対値を有する異なる正規化圧力分布勾配を表している。
【0035】
図8は、図4のブロック440において行って弁組立体110に加わる可能性がある応力をモデル化することができる強制応答解析の結果の例示的な実施例を示している。それらについて圧力応答を測定することができるサンプル位置、すなわち第1の位置820、第2の位置830及び第3の位置840を有する例示的な音響空間610及び弁組立体110を示している。強制応答解析出力800は、主応力をキロポンド/平方インチ単位でy軸上にとりまた励振振動数をHz単位でx軸上にとってグラフに表してある。例示的な出力は、1000Hz〜2000Hzの振動数にわたり第1、第2及び第3の位置820、830、840において弁組立体110上に生じた応力に対応した第1の出力850、第2の出力860及び第3の出力870によって示している。音響空間、それらについて応力を示している位置、及びそれらにわたって応力を測定しかつ応力の大きさを分布出力800に描いた振動数は、単に例示のためのものであり、弁組立体の構造及び用途に応じて異なるものとすることができることを理解されたい。
【0036】
以上の説明は本出願の好ましい実施形態のみに関連していること、また特許請求の範囲及びその均等物によって定まる全体的な技術思想及び技術的範囲から逸脱することなく当業者が本明細書において多くの変更及び修正を加えることができることを、理解されたい。
【図面の簡単な説明】
【0037】
【図1】弁組立体を監視するためのシステムのブロック図。
【図2】図1のシステムで使用するコンピュータ制御監視システムのブロック図。
【図3】図1のシステムで実行する論理を示す例示的なフロー図。
【図4】図1のシステムで実行する論理を示す例示的なフロー図。
【図5】図1のシステムで実行する論理を示す例示的なフロー図。
【図6】図1の例示的な弁組立体の部分断面図。
【図7】図1のシステムからの例示的な出力を示す図。
【図8】図2のシステムからの例示的な出力を示す図。
【符号の説明】
【0038】
100 蒸気タービン
110 弁組立体
120 蒸気入口
130 蒸気出口
140 ロータ組立体
150 監視装置
160 特性アナライザ
170 制御ユニット
190 コンピュータ制御監視システム
210 メモリ
220 プログラム化論理
230 測定データ
240 オペレーティングシステム
250 プロセッサ
260 データバス
270 ユーザインタフェース装置
280 I/Oインタフェース
310 ブロック
320 ブロック
330 ブロック
340 ブロック
410 ブロック
420 ブロック
430 ブロック
440 ブロック
510 ブロック
520 ブロック
530 ブロック
540 ブロック
550 ブロック
610 音響空間
620 制御弁
630 停止弁
640 弁座
650 環状スクリーン
700 音響空間モデル
710 負の正規化圧力
720 正の正規化圧力
800 強制応答解析出力
820 第1の位置
830 第2の位置
840 第3の位置
850 第1の出力
860 第2の出力
870 第3の出力
【技術分野】
【0001】
本出願は、総括的には弁組立体に関し、より具体的には、蒸気タービン内で使用する弁組立体を監視するための方法及びシステムに関する。
【背景技術】
【0002】
蒸気タービンは、加圧蒸気の運動又は熱エネルギーを有用な機械エネルギーに変換する。一般的に、蒸気は蒸気発生器又はボイラ内で生成され、次に停止弁及び制御弁を通ってノズル内に流れ、蒸気は、ロータ組立体を駆動する。次にロータ組立体は、発電機を駆動して電気エネルギーを発生することができる。停止弁及び制御弁は、ノズル内への蒸気の流れを制御することによって、蒸気タービンの作動を制御する。制御弁は一般的に、正常作動レベルの間にノズル内への蒸気の流入を制御する。停止弁は一般的に、正常作動時には開放状態に保持され、即時運転停止が必要な場合に閉鎖される。幾つかの用途では、制御弁及び停止弁は、単一のユニットに統合される。
【0003】
様々な作動レベルにおいて、蒸気タービンの弁組立体内の及び該弁組立体の周りの流れ特性は、振動を招く可能性がある不安定性を引き起こすおそれがある。過度な振動は、望ましくなく、構成要素の疲労及び弁組立体の早期故障を招く可能性がある。作動時に使用中の弁組立体は、弁組立体自体の振動から生じる振動特性並びに弁組立体内の及び該弁組立体の周りの流れから生じる振動特性を示すことが知られており、それらは、それぞれ構造振動及び音響振動と呼ばれることが多い。弁組立体は、個々の振動作用によって、並びに構造及び音響振動数とモード形状との間の相互作用によって影響を受ける可能性がある。
【0004】
振動数の相互作用を補正するための現行の解決方法は、それらの構造特性と音響特性との間に十分な分離を達成すると予測される弁組立体を設計することである。しかしながら、弁組立体を使用する可能性がある用途の数が増すにつれて、それらの作動条件は予測し難くなる。さらに、弁組立体に対する要求は益々増大し、それら弁組立体を一層厳しくかつより多様な条件において作動させるようになる。従って、構造振動特性と音響振動特性との間に十分な分離を与えることが益々困難になり、それによって弁組立体に加わる応力、従って受ける疲労の完全な把握が妨げられている。
【特許文献1】米国特許第6,070,605号公報
【特許文献2】米国特許第6,655,409号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
従って、蒸気タービン内で使用する弁組立体の振動特性をより良く把握することに対する願望がある。さらに、使用状態にある弁組立体の振動特性と比較して、使用しようとする様々な作動状態時における弁組立体の振動特性についての把握を得ることが好ましい。
【課題を解決するための手段】
【0006】
従って、本出願は、蒸気タービンの弁組立体を監視するための装置及び方法を提供する。本出願の1つの実施形態では、弁組立体を監視する方法を提供する。最初に、作動に先立つ少なくとも1つの弁組立体の振動特性を測定することができる。次に、弁組立体の作動中にその弁組立体の挙動を監視し、次にその弁組立体の挙動を作動に先立って判定した振動特性と比較することができる。作動中に監視した弁組立体の挙動を作動に先立って測定した弁組立体の特性と比較することにより、作動中に弁組立体が受けた応力レベルを推定することを可能にすることができる。
【0007】
別の実施形態では、蒸気タービンの弁組立体を監視するためのシステムを提供する。本システムは、少なくとも1つの弁組立体に結合された少なくとも1つの特性アナライザを含むことができ、1つ又は複数の特性アナライザは、作動に先立って弁組立体の振動特性を測定し、その振動特性をメモリ内に記憶するようにプログラムすることができる。作動中に弁組立体の挙動を監視するために、少なくとも1つの監視装置を弁組立体に結合することができる。少なくとも1つの制御ユニットを、1つ又は複数の監視装置に結合することができ、制御ユニットは、弁組立体の監視した挙動を監視装置から受け、メモリから振動特性を検索し、作動中における監視挙動を作動に先立って測定した振動特性と比較し、かつ作動に先立つ振動特性に対する作動中の挙動の比較に基づいて、作動中に弁組立体が受けた応力レベルを推定するようにプログラムされる。
【0008】
さらに別の実施形態では、蒸気タービン内で使用する少なくとも1つの弁組立体を監視する方法を提供する。最初に、弁組立体のベースライン特性を、作動に先立って複数の作動状態において測定することができる。ベースライン特性を測定するステップは、弁組立体の音響空間及び構造体の固有振動数を測定するステップと、固有振動数の少なくとも1つについて弁組立体に作用する振動圧力分布及び振動圧力振幅を判定するステップと、1つの弁組立体に対して強制応答解析を行うステップとを含むことができ、強制応答解析は、振動圧力分布及び振動圧力振幅を考慮することを含むことができる。弁組立体の挙動は、作動中に監視することができ、この挙動には、弁組立体の振動数、弁組立体の振動振幅、弁組立体の弁リフト、蒸気圧力、及び蒸気温度が含まれる。次に、弁組立体の作動中の挙動は、弁組立体のベースライン特性と比較することができる。本方法は、ベースライン特性に対する作動中の挙動の比較に基づいて、弁組立体の残余有効寿命を予測することを可能にすることができる。
【0009】
本出願のこれらの及びその他の特徴は、幾つかの図面及び特許請求の範囲と関連させて以下の詳細な説明を読む時、当業者には明らかになるであろう。
【発明を実施するための最良の形態】
【0010】
次に以下において、全てではないが幾つかの実施形態を示した添付図面を参照して、本出願について一層完全に説明する。実際には、本出願の主題は、多くの異なる形態で具現化することができ、本明細書に記載した実施形態に限定されるものと解釈すべきではなく、むしろこれらの実施形態は、本開示が適用法的要求を満たすようにするために示している。全体を通して、同じ参照符号は同様な要素を指している。
【0011】
本出願では、本明細書に記載した少なくとも1つの実施形態によるシステム、方法、装置及びコンピュータプログラム製品のブロック図を説明している。ブロック図の各ブロック及びブロック図内のブロックの組合せは、それぞれ少なくとも部分的にはコンピュータプログラム命令によって実行することができることを理解されたい。これらのコンピュータプログラム命令は、汎用コンピュータ、専用コンピュータ、専用ハードウエアベースのコンピュータ、又はその他のプログラム可能データ処理装置にロードしてマシンを作り出して、コンピュータ又はその他のプログラム可能データ処理装置上で実行される命令が、以下の記載において詳細に説明するブロック図の各ブロック及びブロック図内のブロックの組合せの機能を実行するための手段を作り出すことができる。
【0012】
これらのコンピュータプログラム命令はまた、コンピュータ又はその他のプログラム可能データ処理装置を特定の方法で機能するように命令することができるコンピュータ可読メモリ内に記憶させて、コンピュータ可読メモリ内に記憶した命令が、1つ又は複数のブロック内に指定した機能を実行する命令手段を含む製品を作り出すようにすることができる。コンピュータプログラム命令はまた、コンピュータ又はその他のプログラム可能データ処理装置にロードして一連の動作ステップを該コンピュータ又はその他のプログラム可能データ処理装置上で実行して、コンピュータ又はその他のプログラム可能データ処理装置上で実行される命令が1つ又は複数のブロック内に指定した機能を実行するステップを行うようなコンピュータ実行の処理方法を作り出すことができる。
【0013】
本明細書に記載したシステム及び方法は、コンピュータのオペレーティングシステム上で動作するアプリケーションプログラムにより実行することができる。それらシステム及び方法はまた、ハンドヘルド装置、マルチプロセッサシステム、マイクロコンピュータベースの又はプログラム可能なコンシューマ電子機器、マルチコンピュータ、メインフレームコンピュータ等々を含むその他のコンピュータシステム構成を用いて実施することもできる。
【0014】
本明細書に記載したシステム及び方法の構成要素であるアプリケーションプログラムには、一定の抽象データ型を実行しまた一定のタスク又は動作を行うル−チン、プログラム、構成要素、データ構造等々を含むことができる。分散コンピュータ環境においては、アプリケーションプログラム(全体としての又は一部としての)は、局部メモリ又はその他の記憶装置内に置くことができる。それに加えて又はそれに代えて、アプリケーションプログラム(全体としての又は一部としての)は、通信ネットワークを介してリンクされた遠隔処理装置によってタスクが遂行される環境を可能にする遠隔メモリ又は記憶装置内に置くことができる。以下において、幾つかの図面を通して同じ参照符号が同様な要素を示している図を参照して、例示的な実施形態について説明する。
【0015】
本出願の1つの態様によると、蒸気タービンの弁組立体に対する疲労、より具体的には高サイクル疲労の影響を判定することができる。これらのシステム及び方法は、弁組立体構造及び関連する音響空間に対する振動作用のベースライン特性を判定するために使用することができる。ベースラインは、作動中に弁組立体が示す監視挙動との比較のために使用することができる。従って、把握ベースライン特性と作動中に弁組立体が示す挙動との組合せは、このシステムがオペレータに対して、弁組立体に加わる応力、従って弁組立体の摩耗及び故障するまでの推定時間に関してより良く情報を与えることを可能にする。
【0016】
図1は、蒸気タービンシステム内の蒸気タービン100をブロック図によって示している。蒸気は、弁組立体110に連結した1つ又はそれ以上の蒸気入口120を通して蒸気タービン100に流入することができ、弁組立体110は、1つ又はそれ以上の蒸気出口130を通して1つ又はそれ以上のロータ組立体140に流入する蒸気の流入及びボリュームを制御することができる。弁組立体110は、単一の組立体として制御弁及び停止弁を含むことができる。それに代えて、制御弁及び停止弁は、別々の組立体として設けることができる。弁組立体110は、蒸気の流れを制御する。弁組立体110が開いている場合には、蒸気はそれを通ってロータ140に流れることが可能になることになる。それに代えて、弁組立体110が閉じている場合には、蒸気はそれを通ってロータ140に流れることが許されないことになる。蒸気タービン100は、本明細書に記載した構成要素の1つよりも多く含むことができることが理解される。例えば、複数の弁組立体110は、互いに直列又は並列に作動するように構成することができ、また/或いはそれら弁組立体110は、完全アーク又は部分アーク流入型として作動するように構成することができる。
【0017】
1つ又はそれ以上の監視装置150は、弁組立体110と統合して、弁組立体110の様々なパラメータの監視を可能にすることができる。例えば、監視装置150の1つは、弁組立体110の振幅及び振動数のような振動特性を測定するために使用する加速度計とすることができる。監視装置150の1つの別の例は、弁組立体110に生じる歪みを測定するために使用する歪み計又は動的歪み計とすることができる。また、監視装置150によって監視されるパラメータのその他の実施例には、蒸気圧力、蒸気温度、弁リフト、変位、歪み、加速度又は作動時間を含むことができる。本明細書で述べた作動パラメータ以外の蒸気タービン100の作動パラメータを監視装置150によって監視することができることを、当業者には理解されたい。図3及び図5に付随した記述は、制御ユニット170及び監視装置150の動作に関してさらに詳細に説明している。
【0018】
1つ又はそれ以上のランタイム制御ユニット170は、監視装置150から測定データを受け、記憶しかつ処理することができる。1つ又はそれ以上の特性アナライザ160は、それが作動状態になる前に弁組立体110の特性を取得するために使用することができる。例えば、特性アナライザ160は、有限要素解析、非定常計算流体力学解析、並びに当技術分野において公知であるその他のフィールド又は実験室テストを行う能力を含むことができる。図3及び図4に付随した記述は、特性アナライザ160の動作に関してさらに詳細に説明している。最後に、制御ユニット170及び特性アナライザ160は、1つ又はそれ以上のコンピュータ制御監視システム190上で動作させることができる。図2に付随した記述は、コンピュータ制御監視システム190の動作に関してさらに詳細に説明している。
【0019】
図2は、本出願の例示的な実施形態による、弁組立体110を特徴付けかつ監視するために使用するコンピュータ制御監視システム190のブロック図を示している。より具体的には、コンピュータ制御監視システム190の要素は、制御ユニット170及び特性アナライザ160の機能を実行するために使用することができる。コンピュータ制御監視システム190は、プログラム化論理220(例えば、ソフトウエア)を記憶するメモリ210を含むことができ、また測定データ230を記憶することができる。メモリ210はまた、オペレーティングシステム240を含むことができる。プロセッサ250は、オペレーティングシステム240を利用してプログラム化論理220を実行することができ、またそうすることで、測定データ230を利用することができる。データバス260は、メモリ210及びプロセッサ250間の通信を行うことができる。ユーザは、キーボード、マウス、コントロールパネル、或いはコンピュータ制御監視システム190に又はコンピュータ制御監視システム190からデータを通信することができるあらゆるその他の装置のようなユーザインタフェース装置270を介してコンピュータ制御監視システム190とインタフェースをとることができる。例えば、ユーザインタフェース装置270は、蒸気タービン100の作動中に閾値振動レベルを超えたという信号を、ユーザに対して表示することができる。ユーザインタフェース装置270はまた、弁組立体110の推定消費寿命又は残余寿命をユーザに表示することもできる。コンピュータ制御監視システム190は、蒸気タービン100との統合に先立って、入出力(I/O)インタフェース280を介して蒸気タービン100と通信状態になりまた弁組立体110と通信状態になることができる。より具体的には、コンピュータ制御監視システム190の1つ又はそれ以上は、1つ又は複数の監視装置150を介して弁組立体110を監視することのような制御ユニット170の実行処理を行うことができる。また、コンピュータ制御監視システム190の1つ又はそれ以上はまた、蒸気タービン100の作動に先立って、特性アナライザ160の実行処理を行うことができる。加えて、ロータ組立体140又は複数のその他の蒸気タービン100のようなその他の外部装置は、I/Oインタフェース280を介してコンピュータ制御監視システム190と通信状態にすることができることを理解されたい。この図示した実施形態では、コンピュータ制御監視システム190は、蒸気タービン100に対して遠方に設置することができるが、蒸気タービン100と同位置に設置するか、或いは蒸気タービン100と統合することさえできる。さらに、コンピュータ制御監視システム190及びそれによって実施されるプログラム化論理220は、ソフトウエア、ハードウエア、又はそれらのあらゆる組合せを含むことができる。複数のコンピュータ制御監視システム190を使用することができ、それによって本明細書に記載した異なる特徴を1つ又はそれ以上の異なるコンピュータ制御監視システム190上で実行できることも理解されたい。
【0020】
図3〜図5は、本出願の実施形態がそれによって動作することができる方法を示した例示的なフロー図である。図3は、本出願の例示的実施形態による、弁組立体110のベースライン特性及び作動挙動を判定するために使用する特性アナライザ160及び制御ユニット170の基本的動作の例示的フロー図である。ブロック310において、特性アナライザ160は、1つ又はそれ以上の作動状態における弁組立体110のベースライン特性を判定することができる。特性アナライザ160によって解析される作動状態は、例えばコールド始動、ホット始動、ウォーム始動、負荷移行及び運転停止とすることができる。
【0021】
上記のように、特性アナライザ160は、1つ又はそれ以上のコンピュータ制御監視システム190上で動作させることができ、またメモリ210内にプログラム化論理220として記憶された1つ又はそれ以上のプログラムモジュールを含むことができる。これらのプログラムモジュールは、ブロック310における解析中に使用することができ、有限要素解析、非定常計算流体力学(「非定常CFD」)解析、或いは当技術分野において公知であるその他の実験室テスト又はフィールドテストを行うことができる。特性アナライザ160の動作及び特性アナライザ160によって実施される方法は、図4に付随した記述において一層完全に詳述する。
【0022】
ベースライン特性を判定した後に、弁組立体110は、図1を参照して説明したように制御ユニット170と通信状態になった1つ又はそれ以上の監視装置150を使用して、ブロック320で示すように、蒸気タービン100内での作動中に監視することができる。制御ユニット170の動作及び制御ユニット170によって実施される方法は、図5に付随した記述において一層完全に詳述する。
【0023】
ブロック330において、制御ユニット170によって測定した作動挙動は、特性アナライザ160によって判定したベースライン特性と比較して、作動中に弁組立体110に加わる応力を特定することができる。より具体的には、ブロック320において測定した加速度及び振動数データのような作動挙動並びにブロック310におけるベースライン特性により特定した音響刺激は、数値アルゴリズムにより、作動振動振幅を予測すること、従って作動中に弁組立体110が受ける応力を予測することを可能にする。
【0024】
最後に、ブロック340に示すように、弁組立体110に対する影響の可能性を把握することにより、オペレータは、高サイクル疲労の望ましくない影響を予測することが可能になる。より具体的には、ブロック330において推定した作動応力を次に解析して、記録した作動中における弁組立体110の消費寿命を計算することができる。消費寿命は、マイナーの法則、或いは対数分布のような確率分布、ワイブル分布又は当技術分野において一般に公知であるその他の分布などのその他の応力予測法を用いて計算することができる。次に消費寿命は、後の参照及び演算のためにメモリ210内に記憶することができる。さらに、消費寿命の計算値を累積的に加算して、総消費寿命の測定値を得ると共に、弁組立体110の残余の使用可能寿命を推定することができる。ブロック340において行った判定は、リアルタイム又は準リアルタイムに行うことができ、また主として過去のデータに基づいて行うことができる。
【0025】
図4は、本出願の態様による、特性アナライザ160によって行って、1つ又はそれ以上の作動状態における弁組立体110のベースライン特性を判定することができるステップの例示的なフロー図である。ベースライン特性は、作動に先立って一般的にはベンチテスト又は実験室テストで判定することができるが、当技術分野において公知であるフィールドテスト又はこれと同様なものを使用して、図4に記載した特性を判定することもできる。さらに、ベースライン特性は、それに限定されないが、以下の作動状態、すなわちコールド始動、ホット始動、ウォーム始動、負荷移動及び運転停止について判定することができる。これらの作動状態の実施例にも拘わらず、本明細書に記載したシステム及び方法は、十分なベースライン測定値を得るのに作動状態全域の測定を必要としないことを理解されたい。さらに、図4を参照して説明した測定の各々は、ベースライン特性の十分な把握を得るために行う必要はなく、従って記載した測定のサブセットでベースラインの把握には十分であることを理解されたい。
【0026】
ブロック410において、弁組立体110の音響空間の固有振動数は、1つ又はそれ以上の作動状態について測定することができる。音響空間は、作動中にそれを通して蒸気が流れる弁組立体110の内部空洞として最も良く定めることができる。より具体的には、音響空間の固有振動数は、有効数値解析を用いて判定することができる。これは一般的に、例えば、音響空間の形状寸法がモデル化されまた音響周波数(振動数)及び正規化圧力分布が市販の有限要素解析ツールを使用して判定される有限要素解析を行うことを含む。このステップの目標は、弁組立体110内の制御弁を囲む音響空間の振動数をより正確に把握することである。さらに、例えば、境界要素法、空間内にマイクロフォンを設置するような実地実測法、又は当技術分野において公知である同様な方法のような幾つかのその他の数値方法を使用してこの目標を達成することができることが理解されたい。従って、励振させることができる可能性な構造モードは、例えば最大10kHzのような一定の振動数まで予測することができる。
【0027】
ブロック420において、弁組立体110構造の固有振動数は、1つ又はそれ以上の作動状態において判定することができる。固有振動数は、加速度計のような監視装置150と同様な測定装置を使用して測定することができる。音響特性及び構造特性の両方を測定することは、弁組立体110が受ける応力に大きな影響を与えかつその残余寿命を予測するのを助けることができる発生可能性がある音響−構造振動相互作用を特定するのを可能にする。
【0028】
ブロック430に示すように、弁組立体110の音響空間及び構造体に加わる圧力の振幅及び分布を判定することができる。例えば、ブロック430において、当技術分野において公知である非定常CFD解析或いはその他の実験室テスト又はフィールドテストを使用して、圧力分布及び相対振幅を特定することができる。一層詳細に後述する図7は、特定の振動数、モード及び作動状態において弁組立体110に対して行った非定常CFD解析の例示的な出力を示している。
【0029】
ブロック430において判定した圧力分布及び振幅は次に、ブロック440に記載した強制応答解析に対して入力としてすることができる。強制応答解析は、有限要素解析法とすることができ、それによって、弁組立体110上の点において異なる作動振動数について応力応答を判定することができる。一層詳細に後述する図8は、弁組立体110上のサンプル位置についての強制応答解析の例示的な出力を示している。ブロック440において判定した測定応力応答振幅は、図3のブロック320において測定しかつ図3のブロック330及び340の上記説明において一層完全に論じた弁組立体110の作動挙動と比較するために使用することができる。
【0030】
ブロック435に示すように、弁組立体110の変位、歪み及び加速度の少なくとも1つは、作動に先立って任意選択的に測定して、弁組立体110のベースライン作動の特性をさらに得ることができる。歪みは、歪み計、動的歪み計又は当技術分野において公知である同様なもののような監視装置150を使用して測定することができる。加速度は、加速度計又は当技術分野において公知である同様なもののような監視装置150を使用して測定することができる。変位は、歪み計及び加速度計から得られた測定値と、動的歪み計又は当技術分野において公知である同様なものから得られた測定値との組合せを使用して測定することができる。これらの測定値を得ることは、このステップにおいて任意選択的であり、本出願において開示した主題を実行するために必須ではない。
【0031】
図5は、制御ユニット170によって行って、蒸気タービン100内において作動中に弁組立体110を監視することができるステップの例示的なフロー図である。ブロック510において、作動中の弁組立体110の振動数及び相対振幅を監視することができる。より具体的には、加速度計又は当技術分野において一般に公知である同様なもののような1つ又はそれ以上の監視装置150は、弁組立体110に取り付けかつ制御ユニット170と通信状態にすることができる。制御ユニット170は、監視装置150によって提供された信号を読み取りかつそれらの信号を振動数及び相対振幅に変換するソフトウエアを含むことができる。ブロック520において、弁組立体110を囲む蒸気圧力レベルは、当技術分野において公知である圧力検知装置を使用して監視することができる。ブロック530において、弁組立体110を囲む蒸気温度レベルは、当技術分野において公知である温度検知装置を使用して監視することができる。弁組立体110の弁リフトは、ブロック540に記載したように、線形可変変位変換器によって、又は当技術分野において一般に公知であるその他の方法によって、測定することができる。
【0032】
上記の状態の全ては、ブロック550に記載したように、時間にわたって測定しかつ追跡することができる。時間にわたってこれらの状態を追跡することにより、どれほど長く弁組立体110が変動状態に曝されかについてより完全な具体像が得られる。さらに、時間にわたって弁組立体110の作動状態を追跡することにより、図3のブロック340に記載したように、装置の消費寿命を推定することが可能になる。上記の状態は単に例示のためのものであること、またその他の状態も測定することができかつ弁組立体110の作動挙動の解析に含ませることができることは当業者には明らかであろうことを理解されたい。例えば、ブロック545に示すように、応力、歪み及び変位の少なくとも1つは、図4のブロック435において任意選択的に測定したベースライン測定値と後で比較するために、作動中に監視することができる。
【0033】
図6は、本明細書に記載した本方法及びシステムの実施中に監視することができる弁組立体110の例示的な実施例を示している。音響空間610は、弁組立体110の内部空洞である。この例示的な弁組立体では、制御弁620及び停止弁630は、単一のユニットに統合される。作動中に、制御弁620は、蒸気入口120から環状スクリーン650及び音響空間610を通って蒸気出口130までの流れを許すように開放状態に保持することができる。流量は、弁座640に対する制御弁620の底面の近接度によって制御することができ、弁座640に対して制御弁620を着座させることによって流れを停止させる。さらに、流れを即座に停止させるために、弁座640に対して停止弁630を急速に着座させることができる。音響空間610の振動特性と制御弁620及び停止弁630を含む弁組立体110の振動特性との間の相互作用は、弁組立体110の挙動全体に影響を与える可能性がある。例えば制御弁620の作動挙動を監視するために、制御弁の弁ステム上に加速度計のような監視装置150を配置することができる。同様に、図示していないが、停止弁の弁ステム上に監視装置150を配置して、停止弁630の作動挙動を監視することができる。
【0034】
図7は、図4のブロック430におけるのと同様に、非定常CFD解析を用いて判定することができるような正規化圧力分布の例示的な実施例を示している。例示的な弁組立体110の音響空間モデル700を示している。非定常CFD解析の図式出力は、負の正規化圧力710から正の正規化圧力720まで徐々に移行する正規化圧力分布の勾配を示している。音響空間モデル700上に示した陰影付き区域は、正の正規化圧力720によって表した最大圧よりも小さくかつ負の正規化圧力710によって表した最小圧よりも大きい相対値を有する異なる正規化圧力分布勾配を表している。
【0035】
図8は、図4のブロック440において行って弁組立体110に加わる可能性がある応力をモデル化することができる強制応答解析の結果の例示的な実施例を示している。それらについて圧力応答を測定することができるサンプル位置、すなわち第1の位置820、第2の位置830及び第3の位置840を有する例示的な音響空間610及び弁組立体110を示している。強制応答解析出力800は、主応力をキロポンド/平方インチ単位でy軸上にとりまた励振振動数をHz単位でx軸上にとってグラフに表してある。例示的な出力は、1000Hz〜2000Hzの振動数にわたり第1、第2及び第3の位置820、830、840において弁組立体110上に生じた応力に対応した第1の出力850、第2の出力860及び第3の出力870によって示している。音響空間、それらについて応力を示している位置、及びそれらにわたって応力を測定しかつ応力の大きさを分布出力800に描いた振動数は、単に例示のためのものであり、弁組立体の構造及び用途に応じて異なるものとすることができることを理解されたい。
【0036】
以上の説明は本出願の好ましい実施形態のみに関連していること、また特許請求の範囲及びその均等物によって定まる全体的な技術思想及び技術的範囲から逸脱することなく当業者が本明細書において多くの変更及び修正を加えることができることを、理解されたい。
【図面の簡単な説明】
【0037】
【図1】弁組立体を監視するためのシステムのブロック図。
【図2】図1のシステムで使用するコンピュータ制御監視システムのブロック図。
【図3】図1のシステムで実行する論理を示す例示的なフロー図。
【図4】図1のシステムで実行する論理を示す例示的なフロー図。
【図5】図1のシステムで実行する論理を示す例示的なフロー図。
【図6】図1の例示的な弁組立体の部分断面図。
【図7】図1のシステムからの例示的な出力を示す図。
【図8】図2のシステムからの例示的な出力を示す図。
【符号の説明】
【0038】
100 蒸気タービン
110 弁組立体
120 蒸気入口
130 蒸気出口
140 ロータ組立体
150 監視装置
160 特性アナライザ
170 制御ユニット
190 コンピュータ制御監視システム
210 メモリ
220 プログラム化論理
230 測定データ
240 オペレーティングシステム
250 プロセッサ
260 データバス
270 ユーザインタフェース装置
280 I/Oインタフェース
310 ブロック
320 ブロック
330 ブロック
340 ブロック
410 ブロック
420 ブロック
430 ブロック
440 ブロック
510 ブロック
520 ブロック
530 ブロック
540 ブロック
550 ブロック
610 音響空間
620 制御弁
630 停止弁
640 弁座
650 環状スクリーン
700 音響空間モデル
710 負の正規化圧力
720 正の正規化圧力
800 強制応答解析出力
820 第1の位置
830 第2の位置
840 第3の位置
850 第1の出力
860 第2の出力
870 第3の出力
【特許請求の範囲】
【請求項1】
弁組立体(110)を監視する方法であって、
作動に先立って少なくとも1つの弁組立体(110)の振動特性を測定するステップと、
作動中に前記少なくとも1つの弁組立体(110)の挙動を監視するステップと、
前記作動中の少なくとも1つの弁組立体(110)の挙動を前記少なくとも1つの弁組立体(110)の振動特性と比較するステップと、
前記作動に先立つ振動特性に対する前記作動中の挙動の比較に基づいて、作動中に前記少なくとも1つの弁組立体(110)が受けた応力レベルを推定するステップと、
を含む方法。
【請求項2】
前記振動特性を測定するステップが、コールド始動、ホット始動、ウォーム始動、負荷移行又は運転停止の少なくとも1つを含む、前記少なくとも1つの弁組立体(110)の複数の作動状態について行われる、請求項1記載の方法。
【請求項3】
前記振動特性を測定するステップが、前記少なくとも1つの弁組立体(110)の複数の作動状態について行われ、また
前記少なくとも1つの弁組立体(110)の音響空間(610)の固有振動数を判定するステップと、
前記少なくとも1つの弁組立体(110)の音響空間(610)の固有振動モードを判定するステップと、
前記少なくとも1つの弁組立体(110)の構造の固有振動数を判定するステップと、
前記少なくとも1つの弁組立体(110)の構造の固有振動モードを判定するステップと、
前記固有振動数の少なくとも1つについて前記少なくとも1つの弁組立体(110)の構造に加わる圧力分布を判定するステップと、
前記固有振動数の少なくとも1つについて前記少なくとも1つの弁組立体(110)の構造に加わる圧力振幅を判定するステップと、
前記少なくとも1つの弁組立体(110)上の少なくとも1つの位置が受けた相対応力レベルを判定する強制応答解析(800)を、前記圧力振幅及び圧力分布を少なくとも部分的に考慮して行うステップと、を含む、
請求項1記載の方法。
【請求項4】
前記振動特性を測定するステップが、前記弁組立体(110)の変位、前記弁組立体(110)上の歪み、又は前記弁組立体(110)の加速度の少なくとも1つを判定するステップをさらに含む、請求項3記載の方法。
【請求項5】
前記音響空間(610)の固有振動数及び固有振動モードを判定するステップが、感圧マイクロフォン(150)を用いて行われ、
前記構造体の固有振動数及び固有振動モードを判定するステップが、加速度計(150)を用いて行われる、
請求項3記載の方法。
【請求項6】
前記圧力分布を判定するステップ及び圧力振幅を判定するステップが、非定常計算流体力学解析を行うステップを含む、請求項3記載の方法。
【請求項7】
前記作動中に少なくとも1つの弁組立体(110)の挙動を監視するステップが、
前記少なくとも1つの弁組立体(110)の振動数を測定するステップと、
前記少なくとも1つの弁組立体(110)の振動振幅を測定するステップと、
前記少なくとも1つの弁組立体(110)の弁リフト、蒸気圧力、又は蒸気温度の少なくとも1つを測定するステップと、
その間にわたって前記測定を行った持続時間を含めて、前記監視挙動をメモリ(210)内に記憶するステップと、をさらに含む、
請求項1記載の方法。
【請求項8】
前記振動数を測定するステップ及び振動振幅を測定するステップが、加速度計(150)を用いて行われる、請求項7記載の方法。
【請求項9】
前記作動中に少なくとも1つの弁組立体(110)が受けた前記推定応力レベルを考慮して、前記少なくとも1つの弁組立体(110)の消費寿命を計算するステップと、
前記消費寿命をメモリ(210)内に記憶するステップと、
をさらに含む、請求項1記載の方法。
【請求項10】
前記消費寿命を累計的に加算して前記少なくとも1つの弁組立体(110)の残余有効寿命を推定するステップと、
少なくとも1人のユーザに対して前記残余有効寿命を表示するステップと、
をさらに含む、請求項9記載の方法。
【請求項1】
弁組立体(110)を監視する方法であって、
作動に先立って少なくとも1つの弁組立体(110)の振動特性を測定するステップと、
作動中に前記少なくとも1つの弁組立体(110)の挙動を監視するステップと、
前記作動中の少なくとも1つの弁組立体(110)の挙動を前記少なくとも1つの弁組立体(110)の振動特性と比較するステップと、
前記作動に先立つ振動特性に対する前記作動中の挙動の比較に基づいて、作動中に前記少なくとも1つの弁組立体(110)が受けた応力レベルを推定するステップと、
を含む方法。
【請求項2】
前記振動特性を測定するステップが、コールド始動、ホット始動、ウォーム始動、負荷移行又は運転停止の少なくとも1つを含む、前記少なくとも1つの弁組立体(110)の複数の作動状態について行われる、請求項1記載の方法。
【請求項3】
前記振動特性を測定するステップが、前記少なくとも1つの弁組立体(110)の複数の作動状態について行われ、また
前記少なくとも1つの弁組立体(110)の音響空間(610)の固有振動数を判定するステップと、
前記少なくとも1つの弁組立体(110)の音響空間(610)の固有振動モードを判定するステップと、
前記少なくとも1つの弁組立体(110)の構造の固有振動数を判定するステップと、
前記少なくとも1つの弁組立体(110)の構造の固有振動モードを判定するステップと、
前記固有振動数の少なくとも1つについて前記少なくとも1つの弁組立体(110)の構造に加わる圧力分布を判定するステップと、
前記固有振動数の少なくとも1つについて前記少なくとも1つの弁組立体(110)の構造に加わる圧力振幅を判定するステップと、
前記少なくとも1つの弁組立体(110)上の少なくとも1つの位置が受けた相対応力レベルを判定する強制応答解析(800)を、前記圧力振幅及び圧力分布を少なくとも部分的に考慮して行うステップと、を含む、
請求項1記載の方法。
【請求項4】
前記振動特性を測定するステップが、前記弁組立体(110)の変位、前記弁組立体(110)上の歪み、又は前記弁組立体(110)の加速度の少なくとも1つを判定するステップをさらに含む、請求項3記載の方法。
【請求項5】
前記音響空間(610)の固有振動数及び固有振動モードを判定するステップが、感圧マイクロフォン(150)を用いて行われ、
前記構造体の固有振動数及び固有振動モードを判定するステップが、加速度計(150)を用いて行われる、
請求項3記載の方法。
【請求項6】
前記圧力分布を判定するステップ及び圧力振幅を判定するステップが、非定常計算流体力学解析を行うステップを含む、請求項3記載の方法。
【請求項7】
前記作動中に少なくとも1つの弁組立体(110)の挙動を監視するステップが、
前記少なくとも1つの弁組立体(110)の振動数を測定するステップと、
前記少なくとも1つの弁組立体(110)の振動振幅を測定するステップと、
前記少なくとも1つの弁組立体(110)の弁リフト、蒸気圧力、又は蒸気温度の少なくとも1つを測定するステップと、
その間にわたって前記測定を行った持続時間を含めて、前記監視挙動をメモリ(210)内に記憶するステップと、をさらに含む、
請求項1記載の方法。
【請求項8】
前記振動数を測定するステップ及び振動振幅を測定するステップが、加速度計(150)を用いて行われる、請求項7記載の方法。
【請求項9】
前記作動中に少なくとも1つの弁組立体(110)が受けた前記推定応力レベルを考慮して、前記少なくとも1つの弁組立体(110)の消費寿命を計算するステップと、
前記消費寿命をメモリ(210)内に記憶するステップと、
をさらに含む、請求項1記載の方法。
【請求項10】
前記消費寿命を累計的に加算して前記少なくとも1つの弁組立体(110)の残余有効寿命を推定するステップと、
少なくとも1人のユーザに対して前記残余有効寿命を表示するステップと、
をさらに含む、請求項9記載の方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2008−248883(P2008−248883A)
【公開日】平成20年10月16日(2008.10.16)
【国際特許分類】
【出願番号】特願2008−82271(P2008−82271)
【出願日】平成20年3月27日(2008.3.27)
【出願人】(390041542)ゼネラル・エレクトリック・カンパニイ (6,332)
【氏名又は名称原語表記】GENERAL ELECTRIC COMPANY
【Fターム(参考)】
【公開日】平成20年10月16日(2008.10.16)
【国際特許分類】
【出願日】平成20年3月27日(2008.3.27)
【出願人】(390041542)ゼネラル・エレクトリック・カンパニイ (6,332)
【氏名又は名称原語表記】GENERAL ELECTRIC COMPANY
【Fターム(参考)】
[ Back to top ]