
蒸気タービンの超過速度を防止する方法及びシステム
【課題】危機的な超過速度に達する前に、蒸気タービン超過速度制御システム異常警報により、早期に警告を出す。
【解決手段】制御弁(22)の制御位置をモニタリングし、負荷減少を検出し、且つ負荷減少から所定の時間内に、制御弁(22)が所定の制御位置に到達しない場合は、制御システム異常警報を発生させる。
【解決手段】制御弁(22)の制御位置をモニタリングし、負荷減少を検出し、且つ負荷減少から所定の時間内に、制御弁(22)が所定の制御位置に到達しない場合は、制御システム異常警報を発生させる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、蒸気タービンの超過速度防止に関するものであり、特に、蒸気タービンの無負荷状態における超過速度制御に関する。
【背景技術】
【0002】
一般に、蒸気タービンには、蒸気タービン速度が規定された超過速度値を超えないことを保証するために、トリップシステムが備え付けられている。蒸気タービンの無負荷状態に続いて生じる恐れのある超過速度は、タービンの制御システムが新たな制御位置を占める場合に、システム機能の遅れ及び制御システムラグによって生ぜしめられる過渡的な回転速度スパイクの結果であり得る。この状態は、電力需要の突然の低下のような、検出不能の負荷制限状態であるか、又はパワーブレーカの開放のような、検出可能な状態である可能性がある。
【0003】
パワーグリッドコードは、一般に、定格速度以上での作動を制限する作動帯を予め規定する。従って、超過速度トリップのセットポイントは、負荷制限状態の結果予想される超過速度を、作動帯内のピーク速度に加算することにより規定される。
【0004】
一般には、無負荷状態に続いて、パワープラントをなるべく早く稼働させることが望ましい。トリップ後に蒸気タービンを稼働させるには時間がかかるので、トリップの数を制限することが望ましい。
【0005】
機械の損傷は、例えば羽根において共振の増大が生ぜしめられた場合には、最大回転設計速度未満でも生じる恐れがある。羽根における共振の増大による損傷は、一般に特定のシステム固有の速度が維持される場合にしか起こらず、一般に無負荷状態のような、過渡的な超過速度状態の間には起こらない。それにもかかわらず、潜在的な羽根応力を減少させるためには、正常作動帯以外の速度に羽根をさらすことを最小限にすることが望ましい。
【発明の概要】
【発明が解決しようとする課題】
【0006】
本発明の課題は、危機的な超過速度に達する前に、蒸気タービン超過速度制御システム異常警報により、早期に警告を出すという問題を克服することにある。
【課題を解決するための手段】
【0007】
この課題を解決するために本発明では、制御弁の制御位置をモニタリングし、負荷減少を検出し、且つ負荷減少から所定の時間内に、制御弁が所定の制御位置に到達しない場合は、制御システム異常警報を発生させるようにした。
【発明の効果】
【0008】
蒸気タービン超過速度制御システム異常警報を発生させるための1方法では、超過速度制御システムに、蒸気タービンの速度を調整するように構成され且つ配置される制御弁を設け、この制御弁は、所定の制御位置を有している。前記方法では更に、制御弁の制御位置をモニタリングし、負荷減少を検出し、この負荷減少から所定の時間内に、制御弁が所定の制御位置に到達しない場合は、制御システム異常警報を発生させる。
【0009】
別の観点において、負荷減少は、所定の蒸気タービン速度である。更に別の視点において、前記所定の時間はゼロである。
【0010】
更に別の観点では、蒸気タービンはパワープラントの1構成要素であり、前記検出には、パワープラントのパワーブレーカの開放を検出することが含まれる。
【0011】
更に別の観点では、超過速度制御システムが制御弁を備えており、この制御弁は、蒸気タービンの速度を調整するように構成され且つ配置されており、当該制御弁は、所定の制御位置を有している。超過速度制御システムは更に、制御弁の制御位置をモニタし、負荷減少を検出し、且つこの負荷減少から所定の時間内に、制御弁が所定の制御位置に到達しない場合は、制御システム異常警報を発生させるために構成されている。
【0012】
本発明の別の観点及び利点は、本発明の実施例を示す添付図面に関連した以下の記載から明らかである。
【図面の簡単な説明】
【0013】
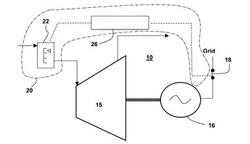
【図1】典型的な超過速度制御システムを有する典型的な蒸気プラントの概略図である。
【発明を実施するための形態】
【0014】
以下に、本発明を実施するための形態を図面につき詳しく説明する。同一部材には同一符号が使用される。以下に説明する詳細な実施例により、本発明は完全に理解される。但し、本発明は詳細な実施例無しでも実施することができ、これらの実施例に限定されるものではない。
【0015】
図1には、蒸気タービン15を備えたパワープラント10の実施例が示されている。このパワープラント10は、定常状態及び変動状態の両方において蒸気タービン15の超過速度を防止するか、又は少なくとも最小にするための、典型的な超過速度制御システム20を有している。パワープラント10は、発電機16を備えた蒸気タービン15を有していてよい。発電機16とグリッドとの間には、ブレーカ18が設けられている。超過速度制御システム20は、制御入力をモニタリングし、制御パラメータを計算し、且つこれらの制御パラメータを制御弁22のような複数の制御部材に配分するための制御装置26を有している。
【0016】
1実施例において、蒸気タービンの超過速度制御システム20が所望のように作動せず、これにより、蒸気タービン15の超過速度を防止することができない恐れがあるという警告を与える異常警報を発生させるための方法を供与する。超過速度は、蒸気タービン15の作動速度帯又は作動設計速度よりも高い蒸気タービンシャフト速度であると規定される。
【0017】
前記方法では、制御弁22を備えた超過速度制御システム20を設け、前記制御弁22は、蒸気タービン15の速度を調整するように構成され且つ配置されている。蒸気タービン15の速度調整は、例えば図1に示したような、蒸気タービン15への供給ラインに配置された制御弁22によって達成され得る。別の構成及び配置(図示せず)では、蒸気タービン15の中間通気管路に配置された、蒸気タービン中間ベント弁である。
【0018】
この方法では更に、制御弁22の制御位置を測定する。1実施形態では、制御装置26によって生ぜしめられる制御弁位置信号のモニタリングを含む監視である。別の実施形態では、公知の方法を用いた、制御弁22の目下の制御位置のモニタリングを含む監視である。
【0019】
前記方法では更に、負荷減少を検出する。1実施形態では、この負荷減少は、所定の蒸気タービン速度である。これは典型的には、作動帯及び/又は作動設計速度ウインドウの上限の蒸気タービン速度である。別の実施形態において、蒸気タービン15がパワープラント10の1構成要素である場合には、負荷減少は、パワープラント10のパワーブレーカ18の開放である。
【0020】
前記方法では更に、負荷減少から所定の時間内に、制御弁22が所定の制御位置に達しない場合は、制御システム異常警報を発生させる。この異常警報の背景にあるロジックは、負荷減少に続いて、超過速度制御システム20が制御弁22に予測信号を送るように構成されており、次いで制御弁22は、予測過程において前記予測信号に応答する。この予測行動、即ち制御信号の送信又は制御位置への到達が得られない場合に考えられる理由は、超過速度制御システムの異常である。この異常は一般に、負荷減少の検出、制御応答計算、制御弁22に対する信号又は制御弁22自体を含む、超過速度制御システム20のあらゆる部分の故障によるものである可能性があるが、これらに限定されるものではない。
【0021】
1実施形態では、超過速度制御システム20は、超過速度制御システム異常警報を発生させるように構成されている。超過速度制御システム20は制御弁22を有しており、この制御弁22は、蒸気タービン15の速度を調整するように構成され且つ配置されている。制御弁22は、所定の制御位置と、この制御位置をモニタリングするための手段とを有している。超過速度制御システム20は更に、負荷減少を検出するための手段を有している。このような手段の一例は、パワーブレーカステータスモニタである。超過速度制御システム20は更に、負荷減少から所定の時間内に、制御弁22が所定の制御位置に到達しない場合に、制御システム異常警報を発生させるための手段を有している。このような手段は、制御装置26内に配置された制御ロジックを含んでいる。
【0022】
本発明は、当業者が別の実施形態で実施することが可能である。つまり、上で述べた実施形態は全て例に過ぎず、本発明はこれらの実施形態に限定されるものではない。本発明の範囲は、上述の記載よりも、むしろ添付した請求項によって示唆されるものであり、意味及び範囲等の変更は全て、本発明に包含されるものである。
【符号の説明】
【0023】
10 パワープラント、 15 蒸気タービン、 16 発電機、 18 ブレーカ、 20 超過速度制御システム、 22 制御弁、 26 制御装置
【技術分野】
【0001】
本発明は、蒸気タービンの超過速度防止に関するものであり、特に、蒸気タービンの無負荷状態における超過速度制御に関する。
【背景技術】
【0002】
一般に、蒸気タービンには、蒸気タービン速度が規定された超過速度値を超えないことを保証するために、トリップシステムが備え付けられている。蒸気タービンの無負荷状態に続いて生じる恐れのある超過速度は、タービンの制御システムが新たな制御位置を占める場合に、システム機能の遅れ及び制御システムラグによって生ぜしめられる過渡的な回転速度スパイクの結果であり得る。この状態は、電力需要の突然の低下のような、検出不能の負荷制限状態であるか、又はパワーブレーカの開放のような、検出可能な状態である可能性がある。
【0003】
パワーグリッドコードは、一般に、定格速度以上での作動を制限する作動帯を予め規定する。従って、超過速度トリップのセットポイントは、負荷制限状態の結果予想される超過速度を、作動帯内のピーク速度に加算することにより規定される。
【0004】
一般には、無負荷状態に続いて、パワープラントをなるべく早く稼働させることが望ましい。トリップ後に蒸気タービンを稼働させるには時間がかかるので、トリップの数を制限することが望ましい。
【0005】
機械の損傷は、例えば羽根において共振の増大が生ぜしめられた場合には、最大回転設計速度未満でも生じる恐れがある。羽根における共振の増大による損傷は、一般に特定のシステム固有の速度が維持される場合にしか起こらず、一般に無負荷状態のような、過渡的な超過速度状態の間には起こらない。それにもかかわらず、潜在的な羽根応力を減少させるためには、正常作動帯以外の速度に羽根をさらすことを最小限にすることが望ましい。
【発明の概要】
【発明が解決しようとする課題】
【0006】
本発明の課題は、危機的な超過速度に達する前に、蒸気タービン超過速度制御システム異常警報により、早期に警告を出すという問題を克服することにある。
【課題を解決するための手段】
【0007】
この課題を解決するために本発明では、制御弁の制御位置をモニタリングし、負荷減少を検出し、且つ負荷減少から所定の時間内に、制御弁が所定の制御位置に到達しない場合は、制御システム異常警報を発生させるようにした。
【発明の効果】
【0008】
蒸気タービン超過速度制御システム異常警報を発生させるための1方法では、超過速度制御システムに、蒸気タービンの速度を調整するように構成され且つ配置される制御弁を設け、この制御弁は、所定の制御位置を有している。前記方法では更に、制御弁の制御位置をモニタリングし、負荷減少を検出し、この負荷減少から所定の時間内に、制御弁が所定の制御位置に到達しない場合は、制御システム異常警報を発生させる。
【0009】
別の観点において、負荷減少は、所定の蒸気タービン速度である。更に別の視点において、前記所定の時間はゼロである。
【0010】
更に別の観点では、蒸気タービンはパワープラントの1構成要素であり、前記検出には、パワープラントのパワーブレーカの開放を検出することが含まれる。
【0011】
更に別の観点では、超過速度制御システムが制御弁を備えており、この制御弁は、蒸気タービンの速度を調整するように構成され且つ配置されており、当該制御弁は、所定の制御位置を有している。超過速度制御システムは更に、制御弁の制御位置をモニタし、負荷減少を検出し、且つこの負荷減少から所定の時間内に、制御弁が所定の制御位置に到達しない場合は、制御システム異常警報を発生させるために構成されている。
【0012】
本発明の別の観点及び利点は、本発明の実施例を示す添付図面に関連した以下の記載から明らかである。
【図面の簡単な説明】
【0013】
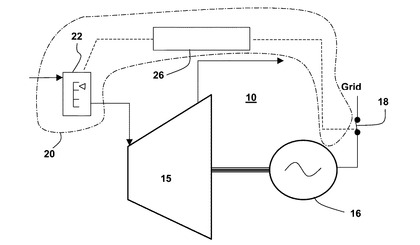
【図1】典型的な超過速度制御システムを有する典型的な蒸気プラントの概略図である。
【発明を実施するための形態】
【0014】
以下に、本発明を実施するための形態を図面につき詳しく説明する。同一部材には同一符号が使用される。以下に説明する詳細な実施例により、本発明は完全に理解される。但し、本発明は詳細な実施例無しでも実施することができ、これらの実施例に限定されるものではない。
【0015】
図1には、蒸気タービン15を備えたパワープラント10の実施例が示されている。このパワープラント10は、定常状態及び変動状態の両方において蒸気タービン15の超過速度を防止するか、又は少なくとも最小にするための、典型的な超過速度制御システム20を有している。パワープラント10は、発電機16を備えた蒸気タービン15を有していてよい。発電機16とグリッドとの間には、ブレーカ18が設けられている。超過速度制御システム20は、制御入力をモニタリングし、制御パラメータを計算し、且つこれらの制御パラメータを制御弁22のような複数の制御部材に配分するための制御装置26を有している。
【0016】
1実施例において、蒸気タービンの超過速度制御システム20が所望のように作動せず、これにより、蒸気タービン15の超過速度を防止することができない恐れがあるという警告を与える異常警報を発生させるための方法を供与する。超過速度は、蒸気タービン15の作動速度帯又は作動設計速度よりも高い蒸気タービンシャフト速度であると規定される。
【0017】
前記方法では、制御弁22を備えた超過速度制御システム20を設け、前記制御弁22は、蒸気タービン15の速度を調整するように構成され且つ配置されている。蒸気タービン15の速度調整は、例えば図1に示したような、蒸気タービン15への供給ラインに配置された制御弁22によって達成され得る。別の構成及び配置(図示せず)では、蒸気タービン15の中間通気管路に配置された、蒸気タービン中間ベント弁である。
【0018】
この方法では更に、制御弁22の制御位置を測定する。1実施形態では、制御装置26によって生ぜしめられる制御弁位置信号のモニタリングを含む監視である。別の実施形態では、公知の方法を用いた、制御弁22の目下の制御位置のモニタリングを含む監視である。
【0019】
前記方法では更に、負荷減少を検出する。1実施形態では、この負荷減少は、所定の蒸気タービン速度である。これは典型的には、作動帯及び/又は作動設計速度ウインドウの上限の蒸気タービン速度である。別の実施形態において、蒸気タービン15がパワープラント10の1構成要素である場合には、負荷減少は、パワープラント10のパワーブレーカ18の開放である。
【0020】
前記方法では更に、負荷減少から所定の時間内に、制御弁22が所定の制御位置に達しない場合は、制御システム異常警報を発生させる。この異常警報の背景にあるロジックは、負荷減少に続いて、超過速度制御システム20が制御弁22に予測信号を送るように構成されており、次いで制御弁22は、予測過程において前記予測信号に応答する。この予測行動、即ち制御信号の送信又は制御位置への到達が得られない場合に考えられる理由は、超過速度制御システムの異常である。この異常は一般に、負荷減少の検出、制御応答計算、制御弁22に対する信号又は制御弁22自体を含む、超過速度制御システム20のあらゆる部分の故障によるものである可能性があるが、これらに限定されるものではない。
【0021】
1実施形態では、超過速度制御システム20は、超過速度制御システム異常警報を発生させるように構成されている。超過速度制御システム20は制御弁22を有しており、この制御弁22は、蒸気タービン15の速度を調整するように構成され且つ配置されている。制御弁22は、所定の制御位置と、この制御位置をモニタリングするための手段とを有している。超過速度制御システム20は更に、負荷減少を検出するための手段を有している。このような手段の一例は、パワーブレーカステータスモニタである。超過速度制御システム20は更に、負荷減少から所定の時間内に、制御弁22が所定の制御位置に到達しない場合に、制御システム異常警報を発生させるための手段を有している。このような手段は、制御装置26内に配置された制御ロジックを含んでいる。
【0022】
本発明は、当業者が別の実施形態で実施することが可能である。つまり、上で述べた実施形態は全て例に過ぎず、本発明はこれらの実施形態に限定されるものではない。本発明の範囲は、上述の記載よりも、むしろ添付した請求項によって示唆されるものであり、意味及び範囲等の変更は全て、本発明に包含されるものである。
【符号の説明】
【0023】
10 パワープラント、 15 蒸気タービン、 16 発電機、 18 ブレーカ、 20 超過速度制御システム、 22 制御弁、 26 制御装置
【特許請求の範囲】
【請求項1】
蒸気タービン(15)の超過速度制御システム異常警報を発生させるための方法であって、超過速度制御システム(20)に、蒸気タービン(15)の速度を調整するように構成され且つ配置される制御弁(22)を設け、該制御弁(22)は所定の制御位置を有している形式のものにおいて、
前記制御弁(22)の制御位置をモニタリングし、
負荷減少を検出し、且つ
負荷減少から所定の時間内に、制御弁(22)が所定の制御位置に到達しない場合は、制御システム異常警報を発生させることを特徴とする、蒸気タービン(15)の超過速度制御システム異常警報を発生させるための方法。
【請求項2】
前記負荷減少が、所定の蒸気タービン速度である、請求項1記載の方法。
【請求項3】
前記所定の時間がゼロである、請求項2記載の方法。
【請求項4】
前記蒸気タービン(15)が、発電機(16)を備えたパワープラント(10)の1構成要素であり、前記負荷減少の検出は、パワープラント(10)のパワーブレーカ(18)の開放を検出することを含む、請求項2記載の方法。
【請求項5】
請求項1から4までのいずれか1項記載の方法を実施するために構成された、超過速度制御システム(20)。
【請求項1】
蒸気タービン(15)の超過速度制御システム異常警報を発生させるための方法であって、超過速度制御システム(20)に、蒸気タービン(15)の速度を調整するように構成され且つ配置される制御弁(22)を設け、該制御弁(22)は所定の制御位置を有している形式のものにおいて、
前記制御弁(22)の制御位置をモニタリングし、
負荷減少を検出し、且つ
負荷減少から所定の時間内に、制御弁(22)が所定の制御位置に到達しない場合は、制御システム異常警報を発生させることを特徴とする、蒸気タービン(15)の超過速度制御システム異常警報を発生させるための方法。
【請求項2】
前記負荷減少が、所定の蒸気タービン速度である、請求項1記載の方法。
【請求項3】
前記所定の時間がゼロである、請求項2記載の方法。
【請求項4】
前記蒸気タービン(15)が、発電機(16)を備えたパワープラント(10)の1構成要素であり、前記負荷減少の検出は、パワープラント(10)のパワーブレーカ(18)の開放を検出することを含む、請求項2記載の方法。
【請求項5】
請求項1から4までのいずれか1項記載の方法を実施するために構成された、超過速度制御システム(20)。
【図1】


【公開番号】特開2012−132447(P2012−132447A)
【公開日】平成24年7月12日(2012.7.12)
【国際特許分類】
【外国語出願】
【出願番号】特願2011−275283(P2011−275283)
【出願日】平成23年12月16日(2011.12.16)
【出願人】(503416353)アルストム テクノロジー リミテッド (394)
【氏名又は名称原語表記】ALSTOM Technology Ltd
【住所又は居所原語表記】Brown Boveri Strasse 7, CH−5401 Baden, Switzerland
【Fターム(参考)】
【公開日】平成24年7月12日(2012.7.12)
【国際特許分類】
【出願番号】特願2011−275283(P2011−275283)
【出願日】平成23年12月16日(2011.12.16)
【出願人】(503416353)アルストム テクノロジー リミテッド (394)
【氏名又は名称原語表記】ALSTOM Technology Ltd
【住所又は居所原語表記】Brown Boveri Strasse 7, CH−5401 Baden, Switzerland
【Fターム(参考)】
[ Back to top ]