
蒸着システム用の磁気ラッチ
【課題】本発明は、化学蒸着(CVD)システムまたは物理蒸着(PVD)システムなどの蒸着システムの真空チャンバ内で、コーティング源の上につり下げられた遊星式回転プラットホームに基板を固定する磁気ラッチに関する。
【解決手段】この磁気ラッチは永久磁石を含み、この永久磁石は、基板ホルダを引きつけるために永久磁石がラッチを磁化するラッチ位置と、永久磁石がバイパス回路内で接続されてラッチの磁化が解除され、そのため、基板ホルダが解放される非ラッチ位置との間で移動可能である。
【解決手段】この磁気ラッチは永久磁石を含み、この永久磁石は、基板ホルダを引きつけるために永久磁石がラッチを磁化するラッチ位置と、永久磁石がバイパス回路内で接続されてラッチの磁化が解除され、そのため、基板ホルダが解放される非ラッチ位置との間で移動可能である。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、蒸着システムで使用する磁気ラッチに関し、詳細には、物理蒸着(PVD)システムまたは化学蒸着(CVD)システムの真空チャンバ内で基板ホルダをつり下げるための、柔らかく係合する磁気ラッチに関する。
関連出願のクロスリファレンス
本発明は優先権を主張しない。
【背景技術】
【0002】
PVDまたはCVDのシステム内の供給源からのコーティング剤は、比較的安定しているが空間的な分布を有し、そのため、基板が静止したままの場合、被着された被膜の厚さが不均一になることがある。均一性を向上させるために、供給源と基板の間の幾何学的な関係を適切に選択しなければならない。コーティングすべき表面に直交する軸の回りで基板を回転させると、特に、遊星構成の複数のスピンドルに複数の基板を装着すると、良好な結果が得られることが確認されている。
【0003】
1992年4月21日発行のStefan Locher他の米国特許第5106346号に開示されているものなど、従来型遊星歯車コーティング・システムは、大型の回転プラットホームを含む。密封真空チャンバ内に配設されたこのプラットホームは、その上で回転可能な個々のスピンドル(遊星)をいくつか備える。遺憾ながら、各基板ホルダは、ボルトなどの機械式留め具を使用して各スピンドル上の装着フランジに連結しなければならず、そのため、手作業で交換する必要がある。これらの機械的なシステムは余分な手作業を必要とするだけでなく、温度および圧力の変化によって生じる位置合わせ不良がより発生しやすい。
【0004】
真空チャンバからベアリングおよび歯車の構造をできるだけ離すために、Hurwitt他は、1998年8月18日発行の米国特許第5795448号で、各スピンドルのシャフト内に磁気リンク装置を含む遊星歯車コーティング・システムを開示している。基板ホルダは、陰極の上でつり下げられず、スピンドルの装着フランジに取り付けるために、依然として機械式留め具を必要とする。
【0005】
2002年10月15日発行のShinozakiの米国特許第6464825号に開示されているコーティング・システムは、主真空チャンバ内に入るごみの量を最小限に抑えるために、ローディング/アンローディング用の加圧チャンバと主真空チャンバの間を移動するロボット・アームを含む。Shinozakiのシステムは、相互作用する機械要素によって生じる粒子の発生を最小限に抑えるために、磁気回転駆動部および磁気浮揚部材も含む。しかし、Shinozakiが開示しているのは、複雑な浮揚プラットホームおよび基板ホルダを完全に取り囲む電磁石を備えた単一の回転プラットホームである。遺憾ながらこの手法を遊星歯車コーティング・システムで実施するのは不可能であろう。というのは、遊星システムでは、真空中かつ高温で動作している間に、個々の回転基板ホルダに別々に電力を送達するのは極めて難しいからである。
【特許文献1】米国特許第5106346号
【特許文献2】米国特許第5795448号
【特許文献3】米国特許第6464825号
【発明の開示】
【発明が解決しようとする課題】
【0006】
本発明の目的は、遊星式コーティング・システム内の陰極の上につり下げられたスピンドルに、基板に衝撃を与えず、粒子状物質を発生させることなく、基板ホルダを取り付ける磁気ラッチを提供することによって先行技術の欠点を克服することである。
【課題を解決するための手段】
【0007】
したがって、本発明は、基板ホルダに装着された基板をコーティングするコーティング・システムのプロセス・チャンバ内に装着するタイプの遊星式基板支持体に関するものであり、この遊星式基板支持体は、
第1軸の回りで回転可能な主支持体と、
主支持体から延び、それぞれのスピンドル軸の回りで回転可能な複数のスピンドルと、
各スピンドルの端部上の磁気ラッチとを備え、前記磁気ラッチは、永久磁石と、基板ホルダを受ける装着表面とを含み、
各磁気ラッチは、第1部分および第2部分を含み、第2部分は、基板ホルダを引きつけるために永久磁石が装着表面を磁化する第1位置と、装着表面が磁化されない第2位置との間で、第1部分に対して相対的に移動可能である。
【0008】
本発明の別の態様は、基板ホルダに装着された基板をコーティングするコーティング・システムに関するものであり、このコーティング・システムは、
プロセス・チャンバと、
このプロセス・チャンバ内に配設された、基板にコーティングを被着させるためのコーティング源と、
プロセス・チャンバ内に装着された遊星式基板支持体とを備える。
この遊星式基板支持体は、
第1軸の回りで回転可能な主支持体と、
主支持体から延び、それぞれのスピンドル軸の回りで回転可能な少なくとも1つのスピンドルと、
各スピンドル上にあり、基板ホルダを受ける磁気ラッチとを含む。
各磁気ラッチは、
基板ホルダを受ける装着表面を含む第1部分と、
永久磁石を含む第2部分とを備え、第1部分または第2部分の一方は、基板ホルダを引きつけるために装着表面が一時的な磁石を形成する第1位置と、装着表面が磁化されない第2位置との間で、他方の部分に対して相対的に移動可能である。
【0009】
次に、本発明の好ましい実施形態を示す添付の図面を参照して、本発明をより詳細に説明する。
【発明を実施するための最良の形態】
【0010】
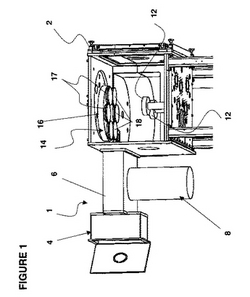
図1〜図3を参照すると、本発明による、物理蒸着(PVD)または化学蒸着(CVD)などの真空蒸着システムは、全体的に1で示すロード・ロック・チャンバおよびプロセス・チャンバ2を含み、これらの間にゲート・バルブ3がある。ゲート・バルブ3により、プロセス・チャンバ2内の圧力に無関係にロード・ロック・チャンバ1内の圧力を、基板のロード・アンロードを行うために大気圧にもってゆくことができ、または、基板を搬送するためにプロセス・チャンバ2の圧力に確立し直すことができる。ロード・ロック・チャンバ1は、カセット・エレベータ5を内部に備えたローディング・コンテナ4と、ロボット・アーム7を内部に備えた搬送チャネル6とを含む。ロボット・アーム7用の制御機構は、搬送チャネル6から延びる円筒形容器8に装着される。
【0011】
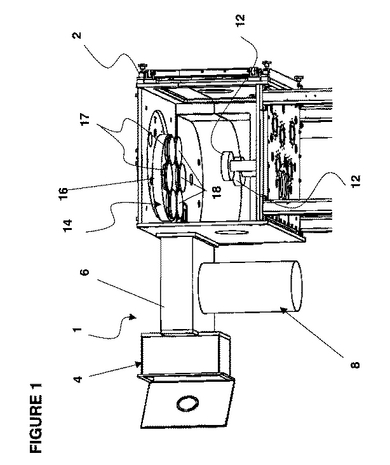
陰極12および遊星式基板支持体14は、プロセス・チャンバ2内に装着される。遊星式基板支持体14は、第1軸の回りで回転可能な円筒形の主プラットホーム16を備える。主プラットホーム16は、それから延びる複数の、例えば6つのスピンドル17を備え、各スピンドル17は、それ自体の軸の回りで回転可能である。これらの軸は、第1軸に平行であることが好ましいが、なんらかの他の角度とすることもできる。使用中、主プラットホーム16が回転すると、個々のスピンドル17もそれぞれ回転し、それによって確実に各基板のすべての部分が均一にコーティングされる。各スピンドル17は、その外側の自由端のところに、陰極12の上で基板をつり下げる磁気ラッチ18を含む。以下、これをさらに説明する。
【0012】
好ましくは低アーク陰極とする少なくとも1つの陰極12は、プロセス・チャンバ2の内部に装着される。1つの陰極12が故障した場合、あるいは、1つの陰極12のコーティングが供給されつくした場合の予備に、臨時の陰極12を設けることができる。あるいは、いくつかの異なる陰極12を設けて、プロセス・チャンバ2を大気に開放せずに、異なるコーティングを連続して被着させることができる。好ましくは、(図示しない)装着プラットホームを移動させることによって、手動または遠隔制御で、陰極12の位置に微調整を加えることができる。
【0013】
(図示しない)質量流量コントローラによってプロセス・チャンバ2にプロセスガスを供給しながら、ポンプ・ポート22を介してプロセス・チャンバ2を排気する。
【0014】
本明細書では、スパッタ被着真空システムを説明してきたが、本発明による遊星式基板支持体は、蒸着システムまたはCVDシステムなど、任意の他の適切なコーティング・システムとともに使用することができる。シャッタ、マスク、イオン衝突装置、最新のアノード・コンセプト、またはプラズマ励起システムなど、追加の機器によってコーティング・プロセスを強化することができる。
【0015】
本明細書では、上向きにスパッタする構成でコーティング・システムを示すが、本発明による磁気ラッチは、下向きにコーティングする、また横向きにコーティングするなど、他の向きで使用し得る。
【0016】
ゲート・バルブ3を閉じ、それによってプロセス・チャンバ2内の圧力が維持される状態で、カセット・エレベータ5に、基板ホルダ23内に装着された未コーティングの基板をロードする。ロード・ロック・チャンバ1を排気すると、プロセス・チャンバ2へのゲート・バルブが開き、ロボット・アーム7が、搬送チャネル6および開いたバルブ・ゲート3を通ってプロセス・チャンバ2に各基板ホルダ23を搬送して、磁気ラッチ18を使用してスピンドル17に装着する。
【0017】
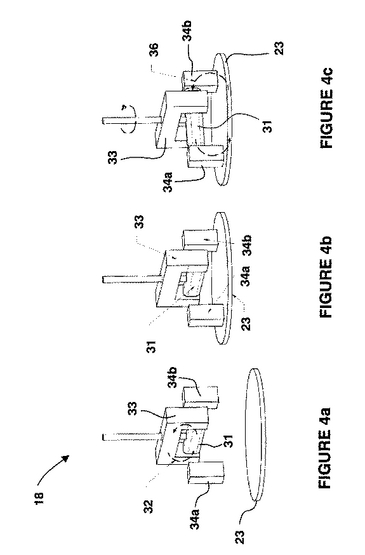
図4a〜図4cに、非ラッチ位置(図4aおよび図4b)またはラッチ位置(図4c)に永久磁石31が配設される、磁気ラッチ18の基礎となる基本原理を示す。図4aでは、矢印32で示す磁気回路がバイパス部分33を貫通して閉じ、極34aおよび34bは磁化されないままになる。図4bでは、基板ホルダ23は、極34aおよび34bに接触して、代わりの磁気回路が形成される。図4cの矢印36で示す代わりの磁気回路を閉じるために、永久磁石31を回転させて極34aおよび34bと整列させ、それによって確実に、基板ホルダ23が極34aおよび34bによって磁気的に引きつけられる。あるいは、永久磁石31は固定したままとし、バイパス部分33ならびに極34aおよび34bを移動させて、永久磁石31と整列した状態および整列しない状態にすることができる。
【0018】
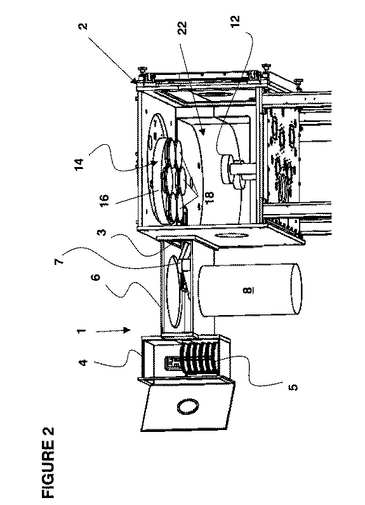
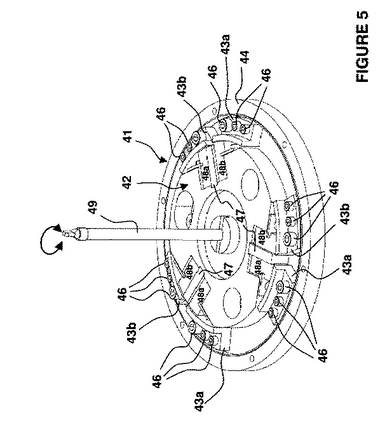
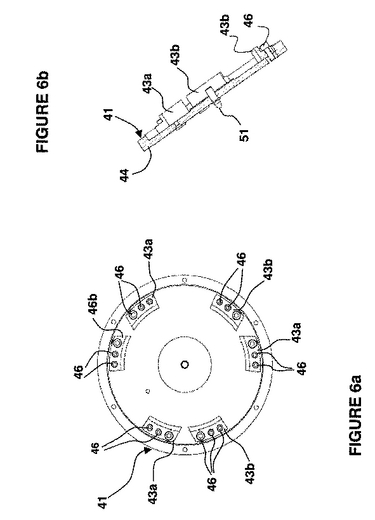
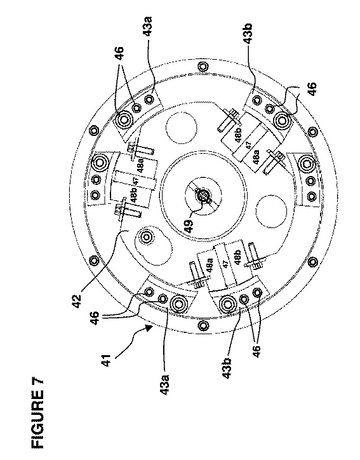
図5、図6a、図6b、および図7に示す磁気ラッチ18の好ましい実施形態は、円筒形ステータ41を含む。円筒形ステータ41は、その上で回転可能な円筒形ロータ42を有する。ステータ41は、3組のステータ極43aおよび43bを含む。これらのステータ極は、例えば六角ボルト46などの複数の機械式留め具によってベース44に固定され、それによって良好な接触が確実に行われる。ロータ42は、ロータ極48aと48bに挟まれた半径方向に延びる3つの永久磁石47を含む。これらの永久磁石のN極およびS極はそれぞれ、ロータ極48aおよび48bに隣接したこれらの永久磁石の長辺に沿って延びる。各磁気ラッチ18は、プロセス・チャンバ2の外側から、ラッチ位置(図5)と非ラッチ位置(図7)の間でロータ42を回転させるための、主プラットホーム16および各スピンドル17を通って下に延びる細長いアクチュエータ49を含む。アクチュエータ49は、アクチュエータ49の上端に、遊星式基板支持体の上でシャフト50(図3)などの別の機械装置と係合するためのトング、またはその他の係合可能な形状を含む。非ラッチ位置では、ロータ極48aおよび48bを回転させてともにステータ極の1つ43bに隣接させ、それによって、永久磁石47を短絡させてステータ41を通る磁気回路を遮断し、基板ホルダ23を解放する。
【0019】
基板ホルダ23とステータ41の位置合わせを容易にするために、ベース44の中心から延びるテーパ・ピン51を設ける。ベース44の中心の単一のテーパ・ピン51により、位置合わせ形状が設けられ、それによって、基板ホルダ23の角度を厳密な向きにすることなく、確実に基板ホルダ23が適切に位置合わせされる。テーパ・ピンは、ステータの円周に沿った他の位置または他の半径方向位置に配置することもできる。
【0020】
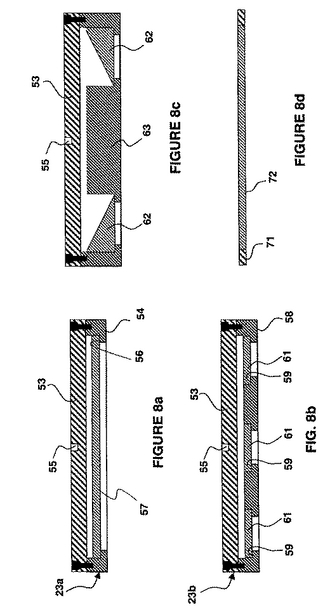
図8a〜図8dに、基板ホルダ23の実施例を示す。図8aでは、基板ホルダ23aは、環状カバー54に固定されたベース53を含む。環状カバー54は、単一の基板57を支持する環状ショルダ56を含む。ベース53に、テーパ・ピン51を受ける円筒形の陥凹部55を設け、それによって、テーパ・ピン51用の対合位置合わせ形状が得られる。ベース53は、磁気ラッチ18によって引きつけられる材料、例えば、鉄、コバルト、およびニッケルの1つまたは複数を含む強磁性材料で全部が、または少なくとも部分的にできている。ベース53は、基板57のコーティングしない面の保護カバーにもなり、その結果、意図せず望まれない裏面コーティングがなくなる。基板ホルダ23b(図8b)は、ベース53に固定された複数ディスク用環状カバー58を含む。複数ディスク用カバー58は、複数の比較的小型の基板61を支持する複数の環状ショルダ59を含む。プリズム62などの異形基板の場合には、複数プリズム用カバー63を設けて、ベース53に装着する(図8c参照)。
【0021】
ベース53の代替手段として、基板72は、ステータ41に引きつけられる強磁性リング71に取り囲まれる(図8d)。リング71の利点は、リング71から基板72を取り外さずに、基板72の両面に同じまたは異なるコーティングを基板72に施し得ることである。さらに、コーティングとコーティングの間に基板72およびリング71をプロセス・チャンバ1から取り出す必要はなく、例えば、ロボット・アーム7によって単にひっくり返す。
【0022】
典型的な基板は、直径200mm、厚さ0.7mm〜1.4mmのガラスウエハであろう。ただし、例えば厚さが最大32mm、質量が最大2kgの他の基板形態も可能である。
【図面の簡単な説明】
【0023】
【図1】本発明によるコーティング・システムの等角図である。
【図2】図1のコーティング・システムを、外壁をいくつか取り除いた状態で示す等角図である。
【図3】本発明による磁気ラッチを備えた遊星式基板ホルダの概略図である。
【図4】図4a〜cは本発明による磁気ラッチの基本原理を示す概略図である。
【図5】本発明による磁気ラッチの等角図である。
【図6】図6aは図5の磁気ラッチのステータの上面図である。図6bは図6aのステータの断面図である。
【図7】非ラッチ位置における図5の磁気ラッチの上面図である。
【図8】図8a〜dは本発明による基板ホルダの概略図である。
【技術分野】
【0001】
本発明は、蒸着システムで使用する磁気ラッチに関し、詳細には、物理蒸着(PVD)システムまたは化学蒸着(CVD)システムの真空チャンバ内で基板ホルダをつり下げるための、柔らかく係合する磁気ラッチに関する。
関連出願のクロスリファレンス
本発明は優先権を主張しない。
【背景技術】
【0002】
PVDまたはCVDのシステム内の供給源からのコーティング剤は、比較的安定しているが空間的な分布を有し、そのため、基板が静止したままの場合、被着された被膜の厚さが不均一になることがある。均一性を向上させるために、供給源と基板の間の幾何学的な関係を適切に選択しなければならない。コーティングすべき表面に直交する軸の回りで基板を回転させると、特に、遊星構成の複数のスピンドルに複数の基板を装着すると、良好な結果が得られることが確認されている。
【0003】
1992年4月21日発行のStefan Locher他の米国特許第5106346号に開示されているものなど、従来型遊星歯車コーティング・システムは、大型の回転プラットホームを含む。密封真空チャンバ内に配設されたこのプラットホームは、その上で回転可能な個々のスピンドル(遊星)をいくつか備える。遺憾ながら、各基板ホルダは、ボルトなどの機械式留め具を使用して各スピンドル上の装着フランジに連結しなければならず、そのため、手作業で交換する必要がある。これらの機械的なシステムは余分な手作業を必要とするだけでなく、温度および圧力の変化によって生じる位置合わせ不良がより発生しやすい。
【0004】
真空チャンバからベアリングおよび歯車の構造をできるだけ離すために、Hurwitt他は、1998年8月18日発行の米国特許第5795448号で、各スピンドルのシャフト内に磁気リンク装置を含む遊星歯車コーティング・システムを開示している。基板ホルダは、陰極の上でつり下げられず、スピンドルの装着フランジに取り付けるために、依然として機械式留め具を必要とする。
【0005】
2002年10月15日発行のShinozakiの米国特許第6464825号に開示されているコーティング・システムは、主真空チャンバ内に入るごみの量を最小限に抑えるために、ローディング/アンローディング用の加圧チャンバと主真空チャンバの間を移動するロボット・アームを含む。Shinozakiのシステムは、相互作用する機械要素によって生じる粒子の発生を最小限に抑えるために、磁気回転駆動部および磁気浮揚部材も含む。しかし、Shinozakiが開示しているのは、複雑な浮揚プラットホームおよび基板ホルダを完全に取り囲む電磁石を備えた単一の回転プラットホームである。遺憾ながらこの手法を遊星歯車コーティング・システムで実施するのは不可能であろう。というのは、遊星システムでは、真空中かつ高温で動作している間に、個々の回転基板ホルダに別々に電力を送達するのは極めて難しいからである。
【特許文献1】米国特許第5106346号
【特許文献2】米国特許第5795448号
【特許文献3】米国特許第6464825号
【発明の開示】
【発明が解決しようとする課題】
【0006】
本発明の目的は、遊星式コーティング・システム内の陰極の上につり下げられたスピンドルに、基板に衝撃を与えず、粒子状物質を発生させることなく、基板ホルダを取り付ける磁気ラッチを提供することによって先行技術の欠点を克服することである。
【課題を解決するための手段】
【0007】
したがって、本発明は、基板ホルダに装着された基板をコーティングするコーティング・システムのプロセス・チャンバ内に装着するタイプの遊星式基板支持体に関するものであり、この遊星式基板支持体は、
第1軸の回りで回転可能な主支持体と、
主支持体から延び、それぞれのスピンドル軸の回りで回転可能な複数のスピンドルと、
各スピンドルの端部上の磁気ラッチとを備え、前記磁気ラッチは、永久磁石と、基板ホルダを受ける装着表面とを含み、
各磁気ラッチは、第1部分および第2部分を含み、第2部分は、基板ホルダを引きつけるために永久磁石が装着表面を磁化する第1位置と、装着表面が磁化されない第2位置との間で、第1部分に対して相対的に移動可能である。
【0008】
本発明の別の態様は、基板ホルダに装着された基板をコーティングするコーティング・システムに関するものであり、このコーティング・システムは、
プロセス・チャンバと、
このプロセス・チャンバ内に配設された、基板にコーティングを被着させるためのコーティング源と、
プロセス・チャンバ内に装着された遊星式基板支持体とを備える。
この遊星式基板支持体は、
第1軸の回りで回転可能な主支持体と、
主支持体から延び、それぞれのスピンドル軸の回りで回転可能な少なくとも1つのスピンドルと、
各スピンドル上にあり、基板ホルダを受ける磁気ラッチとを含む。
各磁気ラッチは、
基板ホルダを受ける装着表面を含む第1部分と、
永久磁石を含む第2部分とを備え、第1部分または第2部分の一方は、基板ホルダを引きつけるために装着表面が一時的な磁石を形成する第1位置と、装着表面が磁化されない第2位置との間で、他方の部分に対して相対的に移動可能である。
【0009】
次に、本発明の好ましい実施形態を示す添付の図面を参照して、本発明をより詳細に説明する。
【発明を実施するための最良の形態】
【0010】
図1〜図3を参照すると、本発明による、物理蒸着(PVD)または化学蒸着(CVD)などの真空蒸着システムは、全体的に1で示すロード・ロック・チャンバおよびプロセス・チャンバ2を含み、これらの間にゲート・バルブ3がある。ゲート・バルブ3により、プロセス・チャンバ2内の圧力に無関係にロード・ロック・チャンバ1内の圧力を、基板のロード・アンロードを行うために大気圧にもってゆくことができ、または、基板を搬送するためにプロセス・チャンバ2の圧力に確立し直すことができる。ロード・ロック・チャンバ1は、カセット・エレベータ5を内部に備えたローディング・コンテナ4と、ロボット・アーム7を内部に備えた搬送チャネル6とを含む。ロボット・アーム7用の制御機構は、搬送チャネル6から延びる円筒形容器8に装着される。
【0011】
陰極12および遊星式基板支持体14は、プロセス・チャンバ2内に装着される。遊星式基板支持体14は、第1軸の回りで回転可能な円筒形の主プラットホーム16を備える。主プラットホーム16は、それから延びる複数の、例えば6つのスピンドル17を備え、各スピンドル17は、それ自体の軸の回りで回転可能である。これらの軸は、第1軸に平行であることが好ましいが、なんらかの他の角度とすることもできる。使用中、主プラットホーム16が回転すると、個々のスピンドル17もそれぞれ回転し、それによって確実に各基板のすべての部分が均一にコーティングされる。各スピンドル17は、その外側の自由端のところに、陰極12の上で基板をつり下げる磁気ラッチ18を含む。以下、これをさらに説明する。
【0012】
好ましくは低アーク陰極とする少なくとも1つの陰極12は、プロセス・チャンバ2の内部に装着される。1つの陰極12が故障した場合、あるいは、1つの陰極12のコーティングが供給されつくした場合の予備に、臨時の陰極12を設けることができる。あるいは、いくつかの異なる陰極12を設けて、プロセス・チャンバ2を大気に開放せずに、異なるコーティングを連続して被着させることができる。好ましくは、(図示しない)装着プラットホームを移動させることによって、手動または遠隔制御で、陰極12の位置に微調整を加えることができる。
【0013】
(図示しない)質量流量コントローラによってプロセス・チャンバ2にプロセスガスを供給しながら、ポンプ・ポート22を介してプロセス・チャンバ2を排気する。
【0014】
本明細書では、スパッタ被着真空システムを説明してきたが、本発明による遊星式基板支持体は、蒸着システムまたはCVDシステムなど、任意の他の適切なコーティング・システムとともに使用することができる。シャッタ、マスク、イオン衝突装置、最新のアノード・コンセプト、またはプラズマ励起システムなど、追加の機器によってコーティング・プロセスを強化することができる。
【0015】
本明細書では、上向きにスパッタする構成でコーティング・システムを示すが、本発明による磁気ラッチは、下向きにコーティングする、また横向きにコーティングするなど、他の向きで使用し得る。
【0016】
ゲート・バルブ3を閉じ、それによってプロセス・チャンバ2内の圧力が維持される状態で、カセット・エレベータ5に、基板ホルダ23内に装着された未コーティングの基板をロードする。ロード・ロック・チャンバ1を排気すると、プロセス・チャンバ2へのゲート・バルブが開き、ロボット・アーム7が、搬送チャネル6および開いたバルブ・ゲート3を通ってプロセス・チャンバ2に各基板ホルダ23を搬送して、磁気ラッチ18を使用してスピンドル17に装着する。
【0017】
図4a〜図4cに、非ラッチ位置(図4aおよび図4b)またはラッチ位置(図4c)に永久磁石31が配設される、磁気ラッチ18の基礎となる基本原理を示す。図4aでは、矢印32で示す磁気回路がバイパス部分33を貫通して閉じ、極34aおよび34bは磁化されないままになる。図4bでは、基板ホルダ23は、極34aおよび34bに接触して、代わりの磁気回路が形成される。図4cの矢印36で示す代わりの磁気回路を閉じるために、永久磁石31を回転させて極34aおよび34bと整列させ、それによって確実に、基板ホルダ23が極34aおよび34bによって磁気的に引きつけられる。あるいは、永久磁石31は固定したままとし、バイパス部分33ならびに極34aおよび34bを移動させて、永久磁石31と整列した状態および整列しない状態にすることができる。
【0018】
図5、図6a、図6b、および図7に示す磁気ラッチ18の好ましい実施形態は、円筒形ステータ41を含む。円筒形ステータ41は、その上で回転可能な円筒形ロータ42を有する。ステータ41は、3組のステータ極43aおよび43bを含む。これらのステータ極は、例えば六角ボルト46などの複数の機械式留め具によってベース44に固定され、それによって良好な接触が確実に行われる。ロータ42は、ロータ極48aと48bに挟まれた半径方向に延びる3つの永久磁石47を含む。これらの永久磁石のN極およびS極はそれぞれ、ロータ極48aおよび48bに隣接したこれらの永久磁石の長辺に沿って延びる。各磁気ラッチ18は、プロセス・チャンバ2の外側から、ラッチ位置(図5)と非ラッチ位置(図7)の間でロータ42を回転させるための、主プラットホーム16および各スピンドル17を通って下に延びる細長いアクチュエータ49を含む。アクチュエータ49は、アクチュエータ49の上端に、遊星式基板支持体の上でシャフト50(図3)などの別の機械装置と係合するためのトング、またはその他の係合可能な形状を含む。非ラッチ位置では、ロータ極48aおよび48bを回転させてともにステータ極の1つ43bに隣接させ、それによって、永久磁石47を短絡させてステータ41を通る磁気回路を遮断し、基板ホルダ23を解放する。
【0019】
基板ホルダ23とステータ41の位置合わせを容易にするために、ベース44の中心から延びるテーパ・ピン51を設ける。ベース44の中心の単一のテーパ・ピン51により、位置合わせ形状が設けられ、それによって、基板ホルダ23の角度を厳密な向きにすることなく、確実に基板ホルダ23が適切に位置合わせされる。テーパ・ピンは、ステータの円周に沿った他の位置または他の半径方向位置に配置することもできる。
【0020】
図8a〜図8dに、基板ホルダ23の実施例を示す。図8aでは、基板ホルダ23aは、環状カバー54に固定されたベース53を含む。環状カバー54は、単一の基板57を支持する環状ショルダ56を含む。ベース53に、テーパ・ピン51を受ける円筒形の陥凹部55を設け、それによって、テーパ・ピン51用の対合位置合わせ形状が得られる。ベース53は、磁気ラッチ18によって引きつけられる材料、例えば、鉄、コバルト、およびニッケルの1つまたは複数を含む強磁性材料で全部が、または少なくとも部分的にできている。ベース53は、基板57のコーティングしない面の保護カバーにもなり、その結果、意図せず望まれない裏面コーティングがなくなる。基板ホルダ23b(図8b)は、ベース53に固定された複数ディスク用環状カバー58を含む。複数ディスク用カバー58は、複数の比較的小型の基板61を支持する複数の環状ショルダ59を含む。プリズム62などの異形基板の場合には、複数プリズム用カバー63を設けて、ベース53に装着する(図8c参照)。
【0021】
ベース53の代替手段として、基板72は、ステータ41に引きつけられる強磁性リング71に取り囲まれる(図8d)。リング71の利点は、リング71から基板72を取り外さずに、基板72の両面に同じまたは異なるコーティングを基板72に施し得ることである。さらに、コーティングとコーティングの間に基板72およびリング71をプロセス・チャンバ1から取り出す必要はなく、例えば、ロボット・アーム7によって単にひっくり返す。
【0022】
典型的な基板は、直径200mm、厚さ0.7mm〜1.4mmのガラスウエハであろう。ただし、例えば厚さが最大32mm、質量が最大2kgの他の基板形態も可能である。
【図面の簡単な説明】
【0023】
【図1】本発明によるコーティング・システムの等角図である。
【図2】図1のコーティング・システムを、外壁をいくつか取り除いた状態で示す等角図である。
【図3】本発明による磁気ラッチを備えた遊星式基板ホルダの概略図である。
【図4】図4a〜cは本発明による磁気ラッチの基本原理を示す概略図である。
【図5】本発明による磁気ラッチの等角図である。
【図6】図6aは図5の磁気ラッチのステータの上面図である。図6bは図6aのステータの断面図である。
【図7】非ラッチ位置における図5の磁気ラッチの上面図である。
【図8】図8a〜dは本発明による基板ホルダの概略図である。
【特許請求の範囲】
【請求項1】
基板ホルダに装着された基板をコーティングするコーティング・システムのプロセス・チャンバ内に装着するタイプの遊星式基板支持体であって、
第1軸の回りで回転可能な主支持体と、
前記主支持体から延び、それぞれのスピンドル軸の回りで回転可能な複数のスピンドルと、
各スピンドルの端部上の磁気ラッチとを備え、前記磁気ラッチは、永久磁石と、基板ホルダを受ける装着表面とを含み、
各磁気ラッチは、第1部分および第2部分を含み、前記第2部分は、基板ホルダを引きつけるために前記永久磁石が前記装着表面を磁化する第1位置と、前記装着表面が磁化されない第2位置との間で、前記第1部分に対して相対的に移動可能である、遊星式基板支持体。
【請求項2】
前記第1部分はそれぞれ、前記装着表面と、前記永久磁石と整列する極とを備えるステータを含み、
前記第2部分はそれぞれ、前記永久磁石を備えるロータを含み、前記永久磁石が前記ステータの前記極と整列する前記第1位置と、前記永久磁石が前記ステータの前記極と整列せず、そのため前記ステータが磁化されない前記第2位置との間で回転する、請求項1に記載の遊星式基板支持体。
【請求項3】
各磁気ラッチはさらに、各ロータを回転させるための、前記主支持体および前記スピンドルを通って延びるアクチュエータを備える、請求項1に記載の遊星式基板支持体。
【請求項4】
各ロータは、複数の永久磁石を含み、各ステータは、前記複数の永久磁石と整列する複数の極を含む、請求項2に記載の遊星式基板支持体。
【請求項5】
各ロータは、各永久磁石の両側にロータ極を含み、前記ロータ極は、前記第1位置にあるときに、それぞれのステータ極と整列して前記装着表面を通る磁気回路を形成し、前記第2位置にあるときに、1つのステータ極と係合して前記永久磁石を短絡する、請求項4に記載の遊星式基板支持体。
【請求項6】
前記基板を支持する基板ホルダをさらに備え、前記基板ホルダは、前記磁気ラッチによって引きつけられる強磁性部分を含む、請求項1に記載の遊星式基板支持体。
【請求項7】
前記基板ホルダは、第1位置合わせ形状を含み、各磁気ラッチは、前記第1位置合わせ形状と係合する第2位置合わせ形状を含む、請求項6に記載の遊星式基板支持体。
【請求項8】
前記第1および第2の位置合わせ形状はそれぞれ、前記基板ホルダおよび各磁気ラッチの中心にある、請求項7に記載の遊星式基板支持体。
【請求項9】
前記基板ホルダは、前記基板を取り囲む環状リングを含む、請求項6に記載の遊星式基板支持体。
【請求項10】
各磁気ラッチは、コーティング源の上で基板ホルダをつり下げるためのものである、請求項1に記載の遊星式基板支持体。
【請求項1】
基板ホルダに装着された基板をコーティングするコーティング・システムのプロセス・チャンバ内に装着するタイプの遊星式基板支持体であって、
第1軸の回りで回転可能な主支持体と、
前記主支持体から延び、それぞれのスピンドル軸の回りで回転可能な複数のスピンドルと、
各スピンドルの端部上の磁気ラッチとを備え、前記磁気ラッチは、永久磁石と、基板ホルダを受ける装着表面とを含み、
各磁気ラッチは、第1部分および第2部分を含み、前記第2部分は、基板ホルダを引きつけるために前記永久磁石が前記装着表面を磁化する第1位置と、前記装着表面が磁化されない第2位置との間で、前記第1部分に対して相対的に移動可能である、遊星式基板支持体。
【請求項2】
前記第1部分はそれぞれ、前記装着表面と、前記永久磁石と整列する極とを備えるステータを含み、
前記第2部分はそれぞれ、前記永久磁石を備えるロータを含み、前記永久磁石が前記ステータの前記極と整列する前記第1位置と、前記永久磁石が前記ステータの前記極と整列せず、そのため前記ステータが磁化されない前記第2位置との間で回転する、請求項1に記載の遊星式基板支持体。
【請求項3】
各磁気ラッチはさらに、各ロータを回転させるための、前記主支持体および前記スピンドルを通って延びるアクチュエータを備える、請求項1に記載の遊星式基板支持体。
【請求項4】
各ロータは、複数の永久磁石を含み、各ステータは、前記複数の永久磁石と整列する複数の極を含む、請求項2に記載の遊星式基板支持体。
【請求項5】
各ロータは、各永久磁石の両側にロータ極を含み、前記ロータ極は、前記第1位置にあるときに、それぞれのステータ極と整列して前記装着表面を通る磁気回路を形成し、前記第2位置にあるときに、1つのステータ極と係合して前記永久磁石を短絡する、請求項4に記載の遊星式基板支持体。
【請求項6】
前記基板を支持する基板ホルダをさらに備え、前記基板ホルダは、前記磁気ラッチによって引きつけられる強磁性部分を含む、請求項1に記載の遊星式基板支持体。
【請求項7】
前記基板ホルダは、第1位置合わせ形状を含み、各磁気ラッチは、前記第1位置合わせ形状と係合する第2位置合わせ形状を含む、請求項6に記載の遊星式基板支持体。
【請求項8】
前記第1および第2の位置合わせ形状はそれぞれ、前記基板ホルダおよび各磁気ラッチの中心にある、請求項7に記載の遊星式基板支持体。
【請求項9】
前記基板ホルダは、前記基板を取り囲む環状リングを含む、請求項6に記載の遊星式基板支持体。
【請求項10】
各磁気ラッチは、コーティング源の上で基板ホルダをつり下げるためのものである、請求項1に記載の遊星式基板支持体。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2006−57183(P2006−57183A)
【公開日】平成18年3月2日(2006.3.2)
【国際特許分類】
【外国語出願】
【出願番号】特願2005−238257(P2005−238257)
【出願日】平成17年8月19日(2005.8.19)
【出願人】(502151820)ジェイディーエス ユニフェイズ コーポレーション (90)
【氏名又は名称原語表記】JDS Uniphase Corporation
【住所又は居所原語表記】1768 Automation Parkway,San Jose,California,USA,95131
【Fターム(参考)】
【公開日】平成18年3月2日(2006.3.2)
【国際特許分類】
【出願番号】特願2005−238257(P2005−238257)
【出願日】平成17年8月19日(2005.8.19)
【出願人】(502151820)ジェイディーエス ユニフェイズ コーポレーション (90)
【氏名又は名称原語表記】JDS Uniphase Corporation
【住所又は居所原語表記】1768 Automation Parkway,San Jose,California,USA,95131
【Fターム(参考)】
[ Back to top ]