
蒸着システム用蒸着源の駆動軸及びこれを具備した蒸着システム
【課題】再作動の時の追突、自動時の間違って入力されたデータによる棚の追突、及び受動時の作業者の間違いによる棚の追突などがあらかじめ防止されることができるとともに、駆動部による作動から離脱して落下または一方向への慣性力によって棚が超過移動されて隣接した棚と追突されるダメージが防止できるようになった蒸着源用追突防止装置を提供する。
【解決手段】駆動源と、駆動源によって動作するように設置された駆動軸と、駆動軸に垂直往復移動するように設置された1以上の棚と、この棚に固定された蒸着機が含まれてなる駆動部と、隣接した棚の距離が検知されるように設置されたセンサーが含まれてなる検知部と、検知部のセンサーから収集されたデータと前もって設定されたデータを比べて駆動部の作動を制御する制御部と、が具備されてなることを特徴とする蒸着源用追突防止装置を提供する。
【解決手段】駆動源と、駆動源によって動作するように設置された駆動軸と、駆動軸に垂直往復移動するように設置された1以上の棚と、この棚に固定された蒸着機が含まれてなる駆動部と、隣接した棚の距離が検知されるように設置されたセンサーが含まれてなる検知部と、検知部のセンサーから収集されたデータと前もって設定されたデータを比べて駆動部の作動を制御する制御部と、が具備されてなることを特徴とする蒸着源用追突防止装置を提供する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、蒸着システムにおいて有機気相物質を噴射する蒸着源を支持する支持板を上下方向に移動させる駆動軸を密閉させる装置及びこれを具備した蒸着システムと、蒸着源移動装置と、蒸着源追突防止装置とに関し、より詳細には、蒸着源から噴射されながら真空チャンバ内で飛散する有機気相物質が駆動軸に付着することにより蒸着源の移動性能が低下することを防止することができる蒸着システム用蒸着源の駆動軸密閉装置及びこれを具備した蒸着システムと、基板に塗布される物質を噴射する蒸着源が固定された棚の重さを軽減するようになった蒸着源用移動装置と、駆動部によって往復移動するように設置された蒸着源間の追突が防止されるようになった蒸着源用追突防止装置とに関するものである。
【背景技術】
【0002】
一般に、平板ディスプレーの中での一つである電界発光ディスプレー装置は、発光層として使用する物質により、無機電界発光ディスプレー装置と、有機電界発光ディスプレー装置に区分され、有機電界発光ディスプレー装置は、低電圧で駆動可能であって、軽量の薄型でありながら視野角が広いだけではなく応答速度もまた速いという長所を有しているので脚光を浴びている。
【0003】
このような有機電界発光ディスプレー装置の有機電界発光素子は、基板上に積層式に形成される陽極、有機物層、及び陰極で構成される。前記有機物層は、正孔と電子が再結合して励起子を形成して光を放出する有機発光層の有機物層を含むとともに、正孔と電子を有機発光層へ円滑に輸送して発光効率を向上させるために前記陰極と有機発光層との間に電子注入層と電子輸送層の有機物層を介在させながら両極と有機発光層との間に正孔注入層と電子輸送層の有機物層を介在させる。
【0004】
前述した構造でなる有機電界発光素子は、一般に、真空蒸着法、イオンプレーティング法及びスパッタリング法などの物理気相蒸着法またはガス反応による化学気相蒸着法により製作される。特に、有機電界発光素子の有機物層を形成するためには、真空チャンバ内で有機物質を蒸発させて形成した有機気相物質を蒸着源から噴射して基板に蒸着させる真空蒸着法が広く使用される。
【0005】
最近、ディスプレイの大型化に応じて基板の大きさが大型化されており、このような大型基板に有機物層を蒸着するために蒸着源が真空チャンバ内で垂直上下方向に移動しながら有機気相物質を噴射する蒸着システムが開発された。
【0006】
このような蒸着システムには、蒸着源を上下方向に移動させる駆動軸が提供されており、前記駆動軸は駆動手段によって軸回転するようになる。駆動軸の軸回転により、蒸着源は、垂直上下方向に移動する間に有機物質を蒸発させることで形成される有機気相物質を噴射するようになる。
【0007】
前記駆動軸は、真空チャンバ内から露出した状態で維持される。また、蒸着源から噴射される有機気相物質は真空チャンバ内で飛散するようになる。この時、飛散する有機気相物質中の一部が駆動軸に付着して異物質として作用することにより蒸着源の上下方向の移動が円滑に遂行されることができない問題点が発生した。したがって、真空チャンバ内に存在する有機気相物質の飛散物が駆動軸に付着することを防止するための方案が要求された。
【0008】
また、前記蒸着源から噴射された物質が塗布される基板が大面積化されることに従って基板の曲がり現象が除去されるように基板とマスクが鉛直の状態(Standingstate)で整列されるようになった垂直整列システムが研究されている。前記蒸着物が基板に細密に蒸着されるように多数の蒸着源が同一移動線上に設置されるとともに、この蒸着源は棚に固定されて駆動装置により移動するように構成された。
【0009】
このような移動装置は、通常、モーターなどが含まれた駆動源により動作するように設置された駆動軸に蒸着源が固定された棚が往復移動可能になるように装着されて構成される。
【0010】
しかし、前もって設定されたデータにより駆動源が作動し、この駆動源の作動により停止された棚が一方向または他方向に往復移など、再移動される棚の停止された位置の確認が難しくて棚の初期移動時に衝突のおそれがあり、データ入力者が錯誤によりデータを間違って入力すれば隣接した棚の追突、正確には、これら棚の追突による棚に固定された蒸着源が破損されるダメージの生じる虞があり、また、作業者により駆動源が作動する時にも作業者の間違いによって棚が動作できる範囲を超過して隣接した棚と追突して蒸着源が破損される問題点があった。
【0011】
これに付け加えて、前記蒸着源から噴射された物質が塗布される基板が大面積化されることに従って、基板の曲がり現象が除去されるように基板とマスクが鉛直の状態で整列されるようになった垂直整列システムが研究されている。したがって、このような垂直整列システムに適用される蒸着源の精密な移動のための移動装置が要求される。
【0012】
一方、従来の蒸着システム用蒸着源の駆動軸及びこれを具備した蒸着システムに関する技術を記載した文献としては、下記特許文献1および2等がある。
【先行技術文献】
【特許文献】
【0013】
【特許文献1】韓国特許出願公開第1999−0038057号明細書
【特許文献2】韓国特許出願公開第2001−0012714号明細書
【特許文献3】特開2004−035964号公報
【特許文献4】特開2004−269907号公報
【特許文献5】特開2004−027291号公報
【発明の概要】
【発明が解決しようとする課題】
【0014】
本発明の目的は、棚が往復移動するように設置された駆動部と、各々動作している棚間の隣接距離を測定する検知部と、新たに入力されたデータと前もって設定されたデータを比べて駆動部の作動を制御する制御部とを具備することによって、再作動の時の追突、自動時の間違って入力されたデータによる棚の追突、及び受動時の作業者の間違いによる棚の追突などがあらかじめ防止されることができるとともに、駆動部による作動から離脱して落下または一方向への慣性力によって棚が超過移動されて隣接した棚と追突されるダメージが防止できるようになった蒸着源用追突防止装置を提供することにある。
【課題を解決するための手段】
【0015】
本発明の一実施例によると、蒸着源用追突防止装置は、駆動源と、駆動源によって動作するように設置された駆動軸と、前記駆動軸に垂直往復移動するように設置された1以上の棚と、この棚に固定された蒸着源が含まれてなる駆動部;前記隣接した棚の距離が検知されるように設置されたセンサーが含まれてなる検知部;前記検知部のセンサーから収集されたデータと前もって設定されたデータを比べて駆動部の作動を制御する制御部;が具備されてなされる。
【0016】
前記センサーは、距離測定用超音波センサー、光センサー、光ファイバーセンサー、赤外線センサー、紫外線センサーの中で選択されたひとつであることが望ましい。前記制御部は前もって設定された棚間の距離と実際の棚間の距離が同一であれば駆動部の動作を停止させるようになされることが望ましい。
【発明の効果】
【0017】
本発明によると、再移動される棚の停止された位置確認によって棚の初期移動の時の衝突が防止され、自動時の間違って入力されたデータによる棚の追突及び、受動時の作業者の間違いによる棚の追突などがあらかじめ防止されることができるとともに、持続的な棚の移動距離の検知を通じて、連続された繰り返し作業をする棚の正確な移動の間違いが検出されてこの検出データによって棚及び駆動部の微細な再調整がなされることができることは勿論、棚が自由落下されるか、または一方向で慣性力によって超過移動されると追突危機の棚が離隔される方向に移動してその追突の被害が減少されることができる効果がある。
【図面の簡単な説明】
【0018】
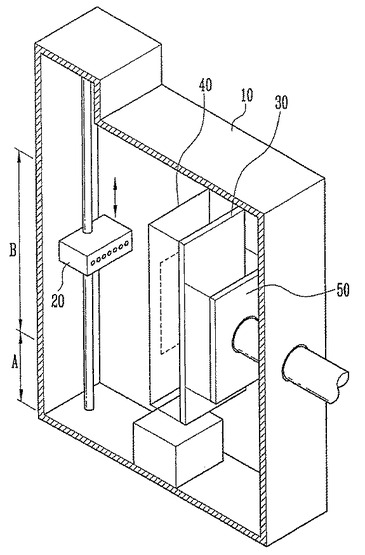
【図1】本発明による真空蒸着システムのバッファー領域に蒸着源が位置している状態を示す概略図である。
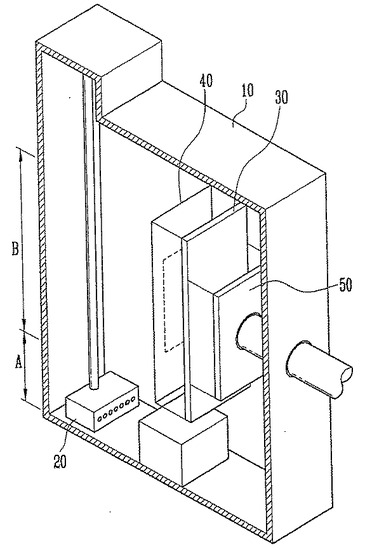
【図2】本発明による真空蒸着システムの成膜領域に蒸着源が位置している状態を示す概略図である。
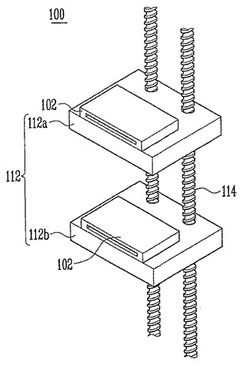
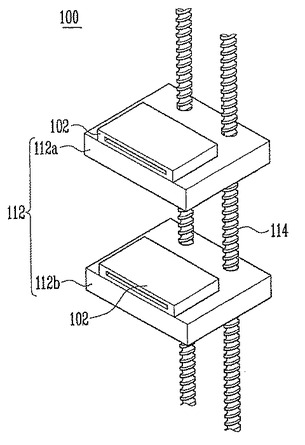
【図3】本発明の実施例による蒸着源用追突防止装置を概略的に示す斜視図である。
【図4】図3に示した追突防止装置の側面図である。
【図5a】図5aは図3の追突防止装置による蒸着源の使用状態図である。
【図5b】図5bは図3の追突防止装置による蒸着源の使用状態図である。
【図6】図3に示した装置の主要構成要素を概略的に示した図面である。
【図7】本発明による蒸着源用移動装置を概略的に示した斜視図である。
【図8】図7に示した移動装置を概略的に示した側面図である。
【図9】本発明による密閉装置が駆動軸の周りに設置された状態を示した分解斜視図である。
【図10】本発明による密閉装置の結合斜視図である。
【図11】本発明による密閉装置が真空チャンバに設置されている蒸着システムの図面である。
【図12】本発明の実施例による密閉装置が駆動軸の周りに設置された状態を示した分解斜視図である。
【図13a】蒸着源がバッファー領域に位置した状態で図12に示した密閉装置の作動状態を示す斜視図である。
【図13b】蒸着源が成膜領域に位置した状態で図12に示した密閉装置の作動状態を示す斜視図である。
【発明を実施するための形態】
【0019】
以下、添付された図を参照して本発明による蒸着システム及び蒸着システム用蒸着源の駆動軸密閉装置を説明する。
【0020】
例えば、用語“有機物質”は基板に有機物層を形成するためにるつぼに液体状態または固体状態に保存されている物質を意味して、用語“有機気相物質”はるつぼを加熱する時に有機物質が蒸発することで形成される気体状態の物質を意味する。このように、本発明を説明することにおいて使用される特定の用語は説明の便利性のために定義されたものであるので当分野に従事する技術者の意図または慣例などによって変わることができ、また本発明の技術的構成要素を限定する意味として理解されてはならない。
【0021】
先に、有機電界発光素子の有機物層を形成するための真空蒸着法は真空チャンバを含む真空蒸着システムで遂行される。前記真空チャンバの一側には有機物層を形成しようとする基板とマスクを整列状態で支持するチャックを持つステージが提供される。また、前記真空チャンバの他側には前記基板を向けて有機気相物質を噴射する蒸着源が提供される。前記蒸着源は、真空チャンバでほとんど直立状態で設置された駆動軸にしたがって垂直上下方向に移動可能である。蒸着源(effusion cell)は説明の便宜のために蒸着機(effusion apparatus)と棚に区分されることができる。
【0022】
すなわち、図1は、本発明による真空蒸着システムのバッファー領域に蒸着源が位置している状態を示す概略図で、図2は、本発明による真空蒸着システムの成膜領域に蒸着源が位置している状態を示す概略図である。
【0023】
図1を参照すれば、真空蒸着システムの真空チャンバ10には有機物層を形成しようとする基板30と、基板30の前方に位置されるマスク40と、マスク40から所定の間隔で離隔されている蒸着源20が設置される。マスク40と基板30はアラインメントシステム(図示しない)によって整列された状態でチャック50に互いに密着された状態に固定される。
【0024】
マスク40は、基板30に形成しようとする有機物層に対応するパターンが形成されているパターン形成部(点線で示す)と、マスクフレーム(図示しない)に溶接を通して固定される固定部とで構成される。この時、真空チャンバ10はマスク40及び基板30の設置位置に対応する成膜領域Bと前記成膜領域B以外の位置に対応するバッファー領域Aに区分される。
【0025】
蒸着源20は、移動手段(図示しない)の作動によって軸回転する駆動軸に移動可能に装着され、前記駆動軸の回転方向にしたがって真空チャンバ10内で垂直上下方向に移動する。
【0026】
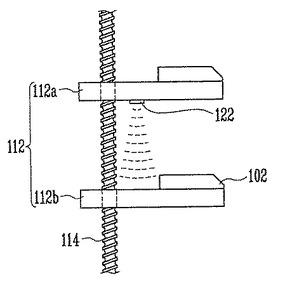
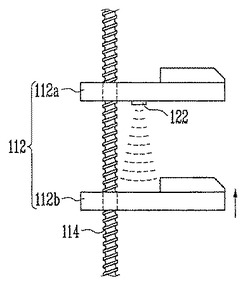
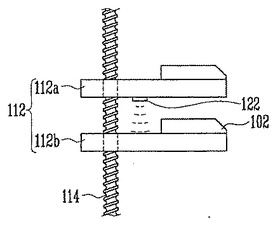
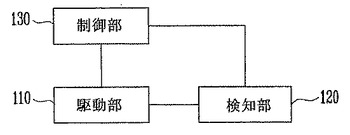
図3及び図4は、本発明による蒸着源用追突防止装置を概略的に示した斜視図及び側面図で、図5a及び図5bは図3の追突防止装置による蒸着源の使用状態図で、図6は本発明による追突防止装置の主要構成要素が概略的に図示された図面である。
【0027】
図3ないし図6を参照すれば、本発明による蒸着源用追突防止装置100は1以上の棚112が往復移動するように設置された駆動部110と、隣接した棚112a、112b間の距離がセンサー122によって検知されるようになる検知部120と、この検知部120から受信されたデータと前もって設定されたデータを比べて駆動部110の作動を制御する制御部130が具備されてなされる。
【0028】
前記駆動部110は、モーター等のような駆動源によって動作するように鉛直で設置された駆動軸114と、この駆動軸114に昇下降/往復移動するように設置された1以上の棚112と、この棚112に固定された蒸着源102などが含まれてなされる。
【0029】
前記検知部120は、図5a及び図5bを見ると、棚112または蒸着源102に距離測定用センサー122が装着されて、このセンサー122が棚112の進行方向に位置された隣接物体に対して持続的に隣接距離を測定するようになされて、前記センサー122によって測定された距離データが前記制御部130に連続的に送信するようになされる。
【0030】
また、前記距離測定用センサー122は、棚112の下面に位置されて下側棚または蒸着源の位置を検出しても良く、棚112の上面に位置されて上側棚の位置を検出しても良く、棚112のどの位置に付着しても関係ない。
【0031】
前記センサー122によって検知される物体は、1以上の棚112が配置される場合、センサー122の配置位置によって棚112または蒸着源102であってもよく、一つの棚112と蒸着源102が配置される場合、棚112の移動範囲を制限したり離脱を防止するためのストッパなどであってもよい。
【0032】
前記距離測定用センサー122は、非接触式センサーであって、超音波センサーが利用されることが望ましい。また、前記距離測定用センサー122は、光センサー、光ファイバーセンサー、赤外線センサー、紫外線センサーなどが含まれたすべての非接触式センサーが利用されることができ、このような非接触センサーの中で選択された一つであることが望ましい。
【0033】
一方、前記制御部130は、検知部120から測定された距離データが受信されて、この受信されたデータと前もって設定されたデータが比較分析されて、この分析されたデータによって駆動部110の作動を非常停止させるか、または棚112の進行方向が転換されることができるようになされる。
【0034】
前もって設定されて入力されたデータは、棚112aの移動範囲による隣接棚112b及び隣接物体との安全な距離に関する資料である。
【0035】
以下、本発明による蒸着源用追突防止装置の作用を簡単に説明する。
【0036】
蒸着源102が固定された1以上の棚112が駆動部110によって移動される範囲に対するデータと、棚または物体などとの安全距離に対するデータが制御部130に入力された状態で駆動部110によって棚112が往復移動するようになる。
【0037】
この時、駆動部110が自動で作動する場合、錯誤によってデータが間違って入力されて棚112が移動範囲を超過して隣接した棚及び物体などと近接されるとセンサー122によってその距離が測定されて制御部130に受信され、制御部130であらかじめ入力された距離データと比べて分析されたデータに基づいて駆動部110を制御し、制御された駆動部110によって棚112が停止されるか、または進行方向が転換される。
【0038】
また、駆動部110による棚112の移動距離が検知部120及び制御部130によっていつも検出されて正確な移動状態が検出され、この検出されたデータによって微細な再調整がなされることができる。
【0039】
また、前記棚112aが駆動部110との締結が解除または誤作動される場合、棚が自由落下されるか、または一方向に慣性力によって超過移動されると、追突危機の棚112bが離隔される方向に移動してその追突の被害が減少されることができる。
【0040】
以下、本発明の実施例による蒸着源用移動装置に関して説明する。
【0041】
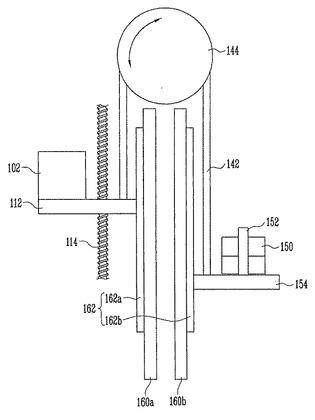
図7は、本発明による蒸着源用移動装置が概略的に図示された斜視図で、図8は、図7に図示された移動装置が概略的に図示された側面図である。
【0042】
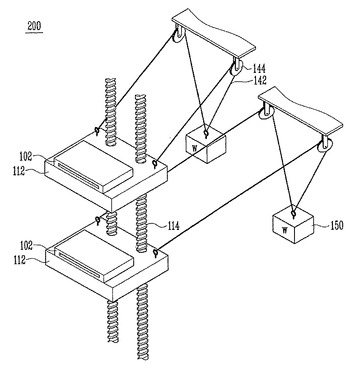
図7及び図8で示したように、本発明による発光素子用蒸着源の移動装置200は、鉛直の基板及びマスクが整列されると基板に蒸着物質を噴射する蒸着源102が含まれてなる垂直整列システムで、前記蒸着源102が固定されて駆動装置(図示しない)により昇下降する棚112が連結体142の一端部と締結され、連結体142は滑車144を介して方向転換された後にその他端部に所定のカウンターウェイト150が装着されるようになされる。
【0043】
前記蒸着源102は、鉛直の基板に有機物質を蒸着するためのものであって、棚112に堅たく固定される。この時、前記蒸着源102は1以上設置されることができる。
【0044】
前記棚112は、蒸着源102を上下に移動させるために蒸着源102が固定される部材であって、1以上の駆動軸114と締結される。この時、前記棚112は、蒸着源102が各々固定されるように蒸着源102の個数と同一な数に用意されることが望ましい。
【0045】
前記駆動軸114は、別途の駆動装置によって回転されるように設置されて、この二つの駆動軸114は1以上の棚112に締結される。駆動軸114の作動によって棚112は上昇または下降するようになる。駆動軸114は一つだけでも構成されることができる。
【0046】
滑車144は、天井または側壁及び別途に建てられた支柱に設置されながら連結体142の移動による摩擦と共に回転することができるようにすることが良く、また前記棚112とカウンターウェイト150は、連結体142とアイボルト(eye bolt)で相互締結されることが良い。連結体142はベルト、紐、チェーンなどが含まれて使用されることができるとともに、連結体142の種類によって滑車144も適した部材に転換されて利用されることができる。
【0047】
このように、前記棚112とカウンターウェイト150が両端部に装着されるように設置されて棚112の重量がカウンターウェイト150によって軽減するようになる。
【0048】
前記カウンターウェイト150の重さは、蒸着源102が固定された棚112の重さと同一にすることが望ましく、またその以下になるようにしても良い。
【0049】
前記蒸着源102が固定された棚112の重さとカウンターウェイト150の重さが同一であって棚112の自重が“0”に近ければ予期しないダメージによる自由落下が防止される。
【0050】
図8を参照すれば、真空蒸着システムの真空チャンバ10に固定設置されている第1の支持フレーム160aに第1のガイドプレート162aが固着していて、蒸着源102を持つ棚112は第1のガイドプレート162aにしたがって移動するように設置される。同じく、真空蒸着システムの真空チャンバ10に固定設置されている第2の支持フレーム160bに第2のガイドプレート162bが固着していて、カウンターウェイト150が搭載された定盤154は第2のガイドプレート162bにしたがって移動するように設置される。棚112と定盤154は連結体142を介して互いに連結される。連結体142は滑車144に巻き付きながら前記棚112の重さ方向と定盤154の重さ方向が重力方向を向けるようになる。
【0051】
この時、前記滑車144は、天井(図示しない)または前記支持フレームに回転可能に固定される。また、前記定盤154に搭載されたカウンターウェイト150は固定部材152によって堅く締結される。
【0052】
以下、本発明による蒸着源用移動装置の作用を簡単に説明する。
【0053】
蒸着源102が固定された棚112の両先端部の各々に連結体142の一端部が締結されて、この連結体142は、各々の滑車144に巻き付き、連結体142の他端部は1以上のカウンターウェイト150と締結される。
【0054】
この時、前記蒸着源102が固定された棚112とカウンターウェイト150が固定された定盤154が各々のガイドプレート132a、132bを介して移動経路が案内されることができる。
【0055】
前記カウンターウェイト150は、蒸着源102が固定された棚112の重さを最大限で軽減するようになって、一番望ましくは、誤作動または不意のダメージによる棚112の自由落下が防止されるように蒸着源102が固定された棚112の重さと同一にすることが良い。
【0056】
このように、蒸着源102が固定された棚112の重さが軽減されると駆動装置が小容量の駆動力でも易しく棚112を移動させることができる。
【0057】
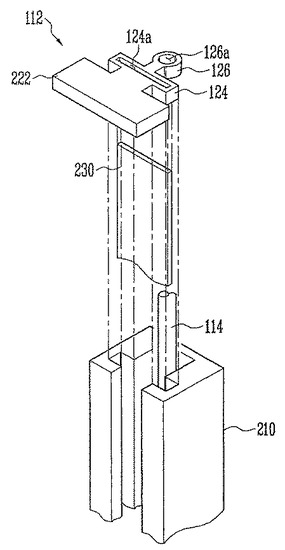
図9と図10を参照すれば、本発明の他の実施例による蒸着システム用蒸着源の駆動軸密閉装置は、駆動軸114を取り囲むビーム210を持つ。ビーム210には下記に説明する棚の結合部と連結部が収容されることができる内部空間が形成される。ビーム210の一側面には下記に説明する棚112が上下方向に移動するように開放されていて、これによって開放端部が形成される。
【0058】
棚112は、駆動軸114に結合する結合部126と、蒸着源20が装着される支持板222と、結合部126と支持板222を連結して所定の大きさの貫通口124aが形成されている連結部124とを有する。
【0059】
連結部124の貫通口124aには板状構造の遮断板230;図面の簡略化のために点線で表示するが貫通されて提供される。
【0060】
結合部126には駆動軸114が貫通する穴126aが形成されて、穴126aは駆動軸114にギアー結合方式で締結されて駆動軸114が駆動手段(図示しない)によって回転すると、結合部126は駆動軸114にしたがって上下方向に移動するようになる。
【0061】
駆動軸114が位置するビーム210の内部空間には棚112の結合部126と連結部124が移動可能に収容される。ビーム210の内部空間を限定する内側面には外側に延ばす溝が前記開放端部に接して上下方向に形成される。棚112の連結部124には前記溝に対応する外向突起が提供される。この時、貫通口124aは前記外向突起が形成された部位に提供される。そして、棚112において、外向突起と支持板222の間には凹溝が形成されて、ビーム210の開放端部は前記凹溝に挿入される羽部として作用する。
【0062】
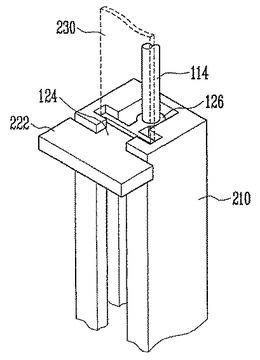
したがって、駆動軸114が結合部126の穴126aに挿入されて、ビーム210の羽部が棚112の凹溝に挿入されて、連結部124の外向突起はビーム210の溝に挿入されることで棚112の結合部126と連結部124はビーム210の内部空間に位置するようになる。この時、遮断板230が連結部124の貫通口124aに挿入されることで駆動軸114は外部から密閉される。そして、棚112の支持板222はビーム210の外部に露出する。
【0063】
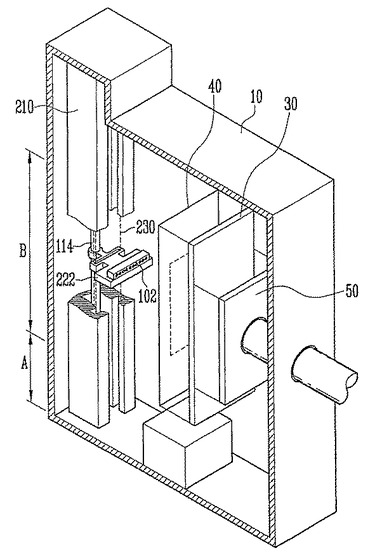
図11に示したように、本発明の実施例による駆動軸密閉装置が設置されている蒸着システムにおいて、真空チャンバ10の一側には基板30とマスク40を整列された状態で支持するチャック50が提供される。真空チャンバ10の他側には駆動軸114がビーム210の内部空間に提供されて、このような状態で遮断板230によって密閉された状態で維持される。ビーム210の開放端部を介して露出している棚112の支持板222上には蒸着機102が搭載される。
【0064】
駆動手段(図示しない)の作動によって駆動軸114が軸回転するようになって、これと連動して棚112の支持板222はビーム210の開放端部にしたがって垂直上下方向に移動する。そして、真空チャンバ10で蒸着機102から基板30を向けて噴射される有機気相物質が飛散されても、遮断板230とビーム210によって飛散される有機気相物質が駆動軸114に付着することを効果的に防止するようになる。
【0065】
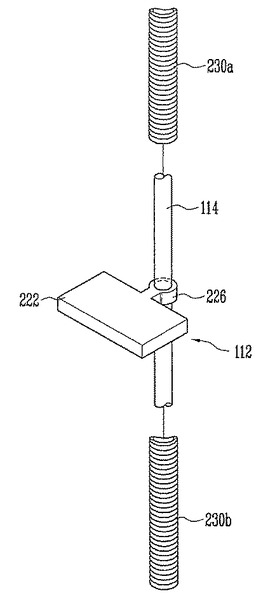
一方、図12を参照すれば、本発明の他の実施例による蒸着システム用蒸着源の駆動軸密閉装置は駆動軸114に結合する結合部226と、結合部226に連結されて蒸着源が搭載される支持板222を持つ支持体112を含む。結合部226を中心としてその上部に位置する駆動軸114は第1の管体230aによって取り囲まれて、その下部に位置する駆動軸114は第2の管体230aによって取り囲まれる。
【0066】
望ましくは、第1の管体230aの下部は結合部226の上部面に固定されて、第2の管体230bの上部は結合部226の下部面に固定される。また、第1の管体230aの上部は真空チャンバ10の上部面に固定されて第2の管体230bの下部は真空チャンバ10の下部面に固定される。よって、駆動軸114は第1の管体及び第2の管体230a、230bと、支持体112の結合部226に密閉された状態で維持される。
【0067】
第1の管体と第2の管体230a、230bは駆動手段(図示しない)によって駆動軸114が回転することによって結合部226が上下方向に移動する間には駆動軸114を効果的に外部から密閉させるために長さの伸縮可能な構造を持つことが望ましい。例えば、第1の管体と、第2の管体230a、230bはベローズ管状の外形を持つことが望ましい。
【0068】
図13aを参照すれば、本発明の他の実施例による駆動軸密閉装置が設置されている蒸着システムにおいて、真空チャンバ10の一側には基板30とマスク40を整列された状態で支持するチャック50が提供される。真空チャンバ10の他側には駆動軸114が提供されて、駆動軸114には結合部226を介して垂直上下方向に移動可能になるように支持体112が結合される。
【0069】
支持体112は有機物質が保存されている蒸着機102が搭載される支持板222を持つ。支持体112の結合部226を中心としてその上部に位置する駆動軸114には第1の管体230aが提供される一方、その下部に位置する駆動軸114には第2の管体230bが提供される。
【0070】
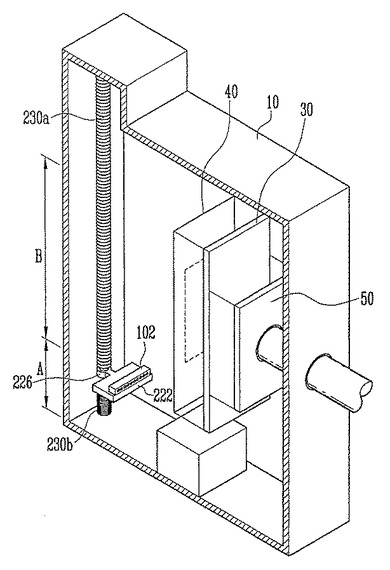
蒸着機102が真空チャンバ10のバッファー領域Aに位置するように支持体112が駆動軸114の下部に提供された状態で、第1の管体230aは最大の長さに伸長されている一方、第2の管体230bは最小の長さに縮小される。この位置で蒸着機102は有機物質を蒸発させて有機気相物質を形成するように予熱され、またこのような有機気相物質の蒸着率が目標値に到逹するまで待機する。
【0071】
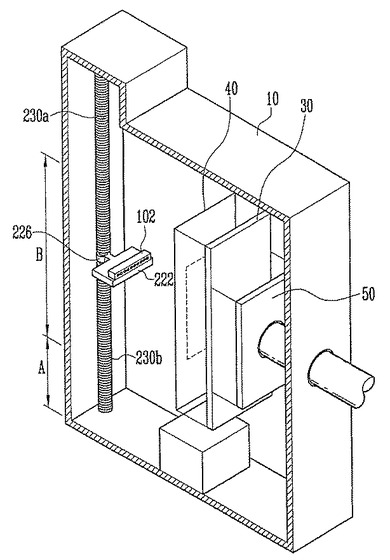
図13bに示したように、蒸着源20から噴射される有機気相物質の蒸着率が目標値に到逹すると、駆動手段(図示しない)の作動によって駆動軸114が軸回転して支持体112は移動する。結果的に、支持体112の支持板222上に搭載されている蒸着機102は真空チャンバ10の成膜領域Bに位置する。この時、蒸着機102から有機気相物質が噴射されて真空チャンバ10内の基板30に有機物層を形成する。
【0072】
一方、蒸着機102が真空チャンバ10の成膜領域Bに位置するように支持体112を移動させた状態で、第1の管体230aは少し縮小されて、また第2の管体230bは少し伸長される。
【0073】
したがって、管体230a、230bは支持体112の移動方向に連動して長さが伸縮するので、管体230a、230b及び結合部226によって駆動軸114は外部から密閉されて、支持体112の支持板222上に搭載されている蒸着機102から噴射される有機気相物質が真空チャンバ10内で飛散しても、飛散する有機気相物質が駆動軸114に接触することを効果的に遮断する。
【0074】
本発明によると、有機気相物質を噴射する蒸着源を上下方向に移動させる駆動軸を真空チャンバ内に密閉された状態で維持するので、噴射される有機気相物質が真空チャンバ内で飛散して駆動軸に付着することを防止して蒸着源が円滑に上下方向に移動するようにする。
【0075】
また、本発明によると、再移動される棚の停止された位置確認によって棚の初期移動の時の衝突が防止され、自動時の間違って入力されたデータによる棚の追突及び、受動時の作業者の間違いによる棚の追突などがあらかじめ防止されることができるとともに、持続的な棚の移動距離の検知を通じて、連続された繰り返し作業をする棚の正確な移動の間違いが検出されてこの検出データによって棚及び駆動部の微細な再調整がなされることができることは勿論、棚が自由落下されるか、または一方向で慣性力によって超過移動されると追突危機の棚が離隔される方向に移動してその追突の被害が減少されることができる効果がある。
【0076】
また、本発明によると、前記にように構成された本発明により、蒸着源及び棚の全体の重さが顕著に低減されて、重量の自重が低減された、すなわち、軽量の棚を往復移動させるための駆動装置の駆動力も小容量に転換されることができるとともに、カウンターウェイトと蒸着源が固定された棚の重さが同一となると予想出来ない棚の位置離脱及び自由落下があらかじめ除去される効果がある。
【0077】
前記の内容は、本発明の望ましい実施例を例示したことであって、本発明が属する分野の当業者であれは、添付された請求範囲に記載した本発明の思想及び要旨を逸脱しない範囲で本発明に対する修正及び変更を加えることができるということを認識しなければならない。
【符号の説明】
【0078】
A バッファー領域
B 成膜領域
10 真空チャンバ
20 蒸着源
30 基板
40 マスク
50 チャック
100 蒸着源用追突防止装置
102 蒸着源
110 駆動部
112 支持体
112a、112b 棚
114 駆動軸
122 センサー
124 連結部
124a 貫通口
126 結合部
126a 結合部の穴
130 制御部
142 連結体
144 滑車
150 カウンターウェイト
152 固定部材
154 定盤
160a 第1の支持フレーム
160b 第2の支持フレーム
162a 第1のガイドプレート
162b 第2のガイドプレート
210 ビーム
222 支持板
226 結合部
230 遮断板
230a 第1の管体
230b 第2の管体
【技術分野】
【0001】
本発明は、蒸着システムにおいて有機気相物質を噴射する蒸着源を支持する支持板を上下方向に移動させる駆動軸を密閉させる装置及びこれを具備した蒸着システムと、蒸着源移動装置と、蒸着源追突防止装置とに関し、より詳細には、蒸着源から噴射されながら真空チャンバ内で飛散する有機気相物質が駆動軸に付着することにより蒸着源の移動性能が低下することを防止することができる蒸着システム用蒸着源の駆動軸密閉装置及びこれを具備した蒸着システムと、基板に塗布される物質を噴射する蒸着源が固定された棚の重さを軽減するようになった蒸着源用移動装置と、駆動部によって往復移動するように設置された蒸着源間の追突が防止されるようになった蒸着源用追突防止装置とに関するものである。
【背景技術】
【0002】
一般に、平板ディスプレーの中での一つである電界発光ディスプレー装置は、発光層として使用する物質により、無機電界発光ディスプレー装置と、有機電界発光ディスプレー装置に区分され、有機電界発光ディスプレー装置は、低電圧で駆動可能であって、軽量の薄型でありながら視野角が広いだけではなく応答速度もまた速いという長所を有しているので脚光を浴びている。
【0003】
このような有機電界発光ディスプレー装置の有機電界発光素子は、基板上に積層式に形成される陽極、有機物層、及び陰極で構成される。前記有機物層は、正孔と電子が再結合して励起子を形成して光を放出する有機発光層の有機物層を含むとともに、正孔と電子を有機発光層へ円滑に輸送して発光効率を向上させるために前記陰極と有機発光層との間に電子注入層と電子輸送層の有機物層を介在させながら両極と有機発光層との間に正孔注入層と電子輸送層の有機物層を介在させる。
【0004】
前述した構造でなる有機電界発光素子は、一般に、真空蒸着法、イオンプレーティング法及びスパッタリング法などの物理気相蒸着法またはガス反応による化学気相蒸着法により製作される。特に、有機電界発光素子の有機物層を形成するためには、真空チャンバ内で有機物質を蒸発させて形成した有機気相物質を蒸着源から噴射して基板に蒸着させる真空蒸着法が広く使用される。
【0005】
最近、ディスプレイの大型化に応じて基板の大きさが大型化されており、このような大型基板に有機物層を蒸着するために蒸着源が真空チャンバ内で垂直上下方向に移動しながら有機気相物質を噴射する蒸着システムが開発された。
【0006】
このような蒸着システムには、蒸着源を上下方向に移動させる駆動軸が提供されており、前記駆動軸は駆動手段によって軸回転するようになる。駆動軸の軸回転により、蒸着源は、垂直上下方向に移動する間に有機物質を蒸発させることで形成される有機気相物質を噴射するようになる。
【0007】
前記駆動軸は、真空チャンバ内から露出した状態で維持される。また、蒸着源から噴射される有機気相物質は真空チャンバ内で飛散するようになる。この時、飛散する有機気相物質中の一部が駆動軸に付着して異物質として作用することにより蒸着源の上下方向の移動が円滑に遂行されることができない問題点が発生した。したがって、真空チャンバ内に存在する有機気相物質の飛散物が駆動軸に付着することを防止するための方案が要求された。
【0008】
また、前記蒸着源から噴射された物質が塗布される基板が大面積化されることに従って基板の曲がり現象が除去されるように基板とマスクが鉛直の状態(Standingstate)で整列されるようになった垂直整列システムが研究されている。前記蒸着物が基板に細密に蒸着されるように多数の蒸着源が同一移動線上に設置されるとともに、この蒸着源は棚に固定されて駆動装置により移動するように構成された。
【0009】
このような移動装置は、通常、モーターなどが含まれた駆動源により動作するように設置された駆動軸に蒸着源が固定された棚が往復移動可能になるように装着されて構成される。
【0010】
しかし、前もって設定されたデータにより駆動源が作動し、この駆動源の作動により停止された棚が一方向または他方向に往復移など、再移動される棚の停止された位置の確認が難しくて棚の初期移動時に衝突のおそれがあり、データ入力者が錯誤によりデータを間違って入力すれば隣接した棚の追突、正確には、これら棚の追突による棚に固定された蒸着源が破損されるダメージの生じる虞があり、また、作業者により駆動源が作動する時にも作業者の間違いによって棚が動作できる範囲を超過して隣接した棚と追突して蒸着源が破損される問題点があった。
【0011】
これに付け加えて、前記蒸着源から噴射された物質が塗布される基板が大面積化されることに従って、基板の曲がり現象が除去されるように基板とマスクが鉛直の状態で整列されるようになった垂直整列システムが研究されている。したがって、このような垂直整列システムに適用される蒸着源の精密な移動のための移動装置が要求される。
【0012】
一方、従来の蒸着システム用蒸着源の駆動軸及びこれを具備した蒸着システムに関する技術を記載した文献としては、下記特許文献1および2等がある。
【先行技術文献】
【特許文献】
【0013】
【特許文献1】韓国特許出願公開第1999−0038057号明細書
【特許文献2】韓国特許出願公開第2001−0012714号明細書
【特許文献3】特開2004−035964号公報
【特許文献4】特開2004−269907号公報
【特許文献5】特開2004−027291号公報
【発明の概要】
【発明が解決しようとする課題】
【0014】
本発明の目的は、棚が往復移動するように設置された駆動部と、各々動作している棚間の隣接距離を測定する検知部と、新たに入力されたデータと前もって設定されたデータを比べて駆動部の作動を制御する制御部とを具備することによって、再作動の時の追突、自動時の間違って入力されたデータによる棚の追突、及び受動時の作業者の間違いによる棚の追突などがあらかじめ防止されることができるとともに、駆動部による作動から離脱して落下または一方向への慣性力によって棚が超過移動されて隣接した棚と追突されるダメージが防止できるようになった蒸着源用追突防止装置を提供することにある。
【課題を解決するための手段】
【0015】
本発明の一実施例によると、蒸着源用追突防止装置は、駆動源と、駆動源によって動作するように設置された駆動軸と、前記駆動軸に垂直往復移動するように設置された1以上の棚と、この棚に固定された蒸着源が含まれてなる駆動部;前記隣接した棚の距離が検知されるように設置されたセンサーが含まれてなる検知部;前記検知部のセンサーから収集されたデータと前もって設定されたデータを比べて駆動部の作動を制御する制御部;が具備されてなされる。
【0016】
前記センサーは、距離測定用超音波センサー、光センサー、光ファイバーセンサー、赤外線センサー、紫外線センサーの中で選択されたひとつであることが望ましい。前記制御部は前もって設定された棚間の距離と実際の棚間の距離が同一であれば駆動部の動作を停止させるようになされることが望ましい。
【発明の効果】
【0017】
本発明によると、再移動される棚の停止された位置確認によって棚の初期移動の時の衝突が防止され、自動時の間違って入力されたデータによる棚の追突及び、受動時の作業者の間違いによる棚の追突などがあらかじめ防止されることができるとともに、持続的な棚の移動距離の検知を通じて、連続された繰り返し作業をする棚の正確な移動の間違いが検出されてこの検出データによって棚及び駆動部の微細な再調整がなされることができることは勿論、棚が自由落下されるか、または一方向で慣性力によって超過移動されると追突危機の棚が離隔される方向に移動してその追突の被害が減少されることができる効果がある。
【図面の簡単な説明】
【0018】
【図1】本発明による真空蒸着システムのバッファー領域に蒸着源が位置している状態を示す概略図である。
【図2】本発明による真空蒸着システムの成膜領域に蒸着源が位置している状態を示す概略図である。
【図3】本発明の実施例による蒸着源用追突防止装置を概略的に示す斜視図である。
【図4】図3に示した追突防止装置の側面図である。
【図5a】図5aは図3の追突防止装置による蒸着源の使用状態図である。
【図5b】図5bは図3の追突防止装置による蒸着源の使用状態図である。
【図6】図3に示した装置の主要構成要素を概略的に示した図面である。
【図7】本発明による蒸着源用移動装置を概略的に示した斜視図である。
【図8】図7に示した移動装置を概略的に示した側面図である。
【図9】本発明による密閉装置が駆動軸の周りに設置された状態を示した分解斜視図である。
【図10】本発明による密閉装置の結合斜視図である。
【図11】本発明による密閉装置が真空チャンバに設置されている蒸着システムの図面である。
【図12】本発明の実施例による密閉装置が駆動軸の周りに設置された状態を示した分解斜視図である。
【図13a】蒸着源がバッファー領域に位置した状態で図12に示した密閉装置の作動状態を示す斜視図である。
【図13b】蒸着源が成膜領域に位置した状態で図12に示した密閉装置の作動状態を示す斜視図である。
【発明を実施するための形態】
【0019】
以下、添付された図を参照して本発明による蒸着システム及び蒸着システム用蒸着源の駆動軸密閉装置を説明する。
【0020】
例えば、用語“有機物質”は基板に有機物層を形成するためにるつぼに液体状態または固体状態に保存されている物質を意味して、用語“有機気相物質”はるつぼを加熱する時に有機物質が蒸発することで形成される気体状態の物質を意味する。このように、本発明を説明することにおいて使用される特定の用語は説明の便利性のために定義されたものであるので当分野に従事する技術者の意図または慣例などによって変わることができ、また本発明の技術的構成要素を限定する意味として理解されてはならない。
【0021】
先に、有機電界発光素子の有機物層を形成するための真空蒸着法は真空チャンバを含む真空蒸着システムで遂行される。前記真空チャンバの一側には有機物層を形成しようとする基板とマスクを整列状態で支持するチャックを持つステージが提供される。また、前記真空チャンバの他側には前記基板を向けて有機気相物質を噴射する蒸着源が提供される。前記蒸着源は、真空チャンバでほとんど直立状態で設置された駆動軸にしたがって垂直上下方向に移動可能である。蒸着源(effusion cell)は説明の便宜のために蒸着機(effusion apparatus)と棚に区分されることができる。
【0022】
すなわち、図1は、本発明による真空蒸着システムのバッファー領域に蒸着源が位置している状態を示す概略図で、図2は、本発明による真空蒸着システムの成膜領域に蒸着源が位置している状態を示す概略図である。
【0023】
図1を参照すれば、真空蒸着システムの真空チャンバ10には有機物層を形成しようとする基板30と、基板30の前方に位置されるマスク40と、マスク40から所定の間隔で離隔されている蒸着源20が設置される。マスク40と基板30はアラインメントシステム(図示しない)によって整列された状態でチャック50に互いに密着された状態に固定される。
【0024】
マスク40は、基板30に形成しようとする有機物層に対応するパターンが形成されているパターン形成部(点線で示す)と、マスクフレーム(図示しない)に溶接を通して固定される固定部とで構成される。この時、真空チャンバ10はマスク40及び基板30の設置位置に対応する成膜領域Bと前記成膜領域B以外の位置に対応するバッファー領域Aに区分される。
【0025】
蒸着源20は、移動手段(図示しない)の作動によって軸回転する駆動軸に移動可能に装着され、前記駆動軸の回転方向にしたがって真空チャンバ10内で垂直上下方向に移動する。
【0026】
図3及び図4は、本発明による蒸着源用追突防止装置を概略的に示した斜視図及び側面図で、図5a及び図5bは図3の追突防止装置による蒸着源の使用状態図で、図6は本発明による追突防止装置の主要構成要素が概略的に図示された図面である。
【0027】
図3ないし図6を参照すれば、本発明による蒸着源用追突防止装置100は1以上の棚112が往復移動するように設置された駆動部110と、隣接した棚112a、112b間の距離がセンサー122によって検知されるようになる検知部120と、この検知部120から受信されたデータと前もって設定されたデータを比べて駆動部110の作動を制御する制御部130が具備されてなされる。
【0028】
前記駆動部110は、モーター等のような駆動源によって動作するように鉛直で設置された駆動軸114と、この駆動軸114に昇下降/往復移動するように設置された1以上の棚112と、この棚112に固定された蒸着源102などが含まれてなされる。
【0029】
前記検知部120は、図5a及び図5bを見ると、棚112または蒸着源102に距離測定用センサー122が装着されて、このセンサー122が棚112の進行方向に位置された隣接物体に対して持続的に隣接距離を測定するようになされて、前記センサー122によって測定された距離データが前記制御部130に連続的に送信するようになされる。
【0030】
また、前記距離測定用センサー122は、棚112の下面に位置されて下側棚または蒸着源の位置を検出しても良く、棚112の上面に位置されて上側棚の位置を検出しても良く、棚112のどの位置に付着しても関係ない。
【0031】
前記センサー122によって検知される物体は、1以上の棚112が配置される場合、センサー122の配置位置によって棚112または蒸着源102であってもよく、一つの棚112と蒸着源102が配置される場合、棚112の移動範囲を制限したり離脱を防止するためのストッパなどであってもよい。
【0032】
前記距離測定用センサー122は、非接触式センサーであって、超音波センサーが利用されることが望ましい。また、前記距離測定用センサー122は、光センサー、光ファイバーセンサー、赤外線センサー、紫外線センサーなどが含まれたすべての非接触式センサーが利用されることができ、このような非接触センサーの中で選択された一つであることが望ましい。
【0033】
一方、前記制御部130は、検知部120から測定された距離データが受信されて、この受信されたデータと前もって設定されたデータが比較分析されて、この分析されたデータによって駆動部110の作動を非常停止させるか、または棚112の進行方向が転換されることができるようになされる。
【0034】
前もって設定されて入力されたデータは、棚112aの移動範囲による隣接棚112b及び隣接物体との安全な距離に関する資料である。
【0035】
以下、本発明による蒸着源用追突防止装置の作用を簡単に説明する。
【0036】
蒸着源102が固定された1以上の棚112が駆動部110によって移動される範囲に対するデータと、棚または物体などとの安全距離に対するデータが制御部130に入力された状態で駆動部110によって棚112が往復移動するようになる。
【0037】
この時、駆動部110が自動で作動する場合、錯誤によってデータが間違って入力されて棚112が移動範囲を超過して隣接した棚及び物体などと近接されるとセンサー122によってその距離が測定されて制御部130に受信され、制御部130であらかじめ入力された距離データと比べて分析されたデータに基づいて駆動部110を制御し、制御された駆動部110によって棚112が停止されるか、または進行方向が転換される。
【0038】
また、駆動部110による棚112の移動距離が検知部120及び制御部130によっていつも検出されて正確な移動状態が検出され、この検出されたデータによって微細な再調整がなされることができる。
【0039】
また、前記棚112aが駆動部110との締結が解除または誤作動される場合、棚が自由落下されるか、または一方向に慣性力によって超過移動されると、追突危機の棚112bが離隔される方向に移動してその追突の被害が減少されることができる。
【0040】
以下、本発明の実施例による蒸着源用移動装置に関して説明する。
【0041】
図7は、本発明による蒸着源用移動装置が概略的に図示された斜視図で、図8は、図7に図示された移動装置が概略的に図示された側面図である。
【0042】
図7及び図8で示したように、本発明による発光素子用蒸着源の移動装置200は、鉛直の基板及びマスクが整列されると基板に蒸着物質を噴射する蒸着源102が含まれてなる垂直整列システムで、前記蒸着源102が固定されて駆動装置(図示しない)により昇下降する棚112が連結体142の一端部と締結され、連結体142は滑車144を介して方向転換された後にその他端部に所定のカウンターウェイト150が装着されるようになされる。
【0043】
前記蒸着源102は、鉛直の基板に有機物質を蒸着するためのものであって、棚112に堅たく固定される。この時、前記蒸着源102は1以上設置されることができる。
【0044】
前記棚112は、蒸着源102を上下に移動させるために蒸着源102が固定される部材であって、1以上の駆動軸114と締結される。この時、前記棚112は、蒸着源102が各々固定されるように蒸着源102の個数と同一な数に用意されることが望ましい。
【0045】
前記駆動軸114は、別途の駆動装置によって回転されるように設置されて、この二つの駆動軸114は1以上の棚112に締結される。駆動軸114の作動によって棚112は上昇または下降するようになる。駆動軸114は一つだけでも構成されることができる。
【0046】
滑車144は、天井または側壁及び別途に建てられた支柱に設置されながら連結体142の移動による摩擦と共に回転することができるようにすることが良く、また前記棚112とカウンターウェイト150は、連結体142とアイボルト(eye bolt)で相互締結されることが良い。連結体142はベルト、紐、チェーンなどが含まれて使用されることができるとともに、連結体142の種類によって滑車144も適した部材に転換されて利用されることができる。
【0047】
このように、前記棚112とカウンターウェイト150が両端部に装着されるように設置されて棚112の重量がカウンターウェイト150によって軽減するようになる。
【0048】
前記カウンターウェイト150の重さは、蒸着源102が固定された棚112の重さと同一にすることが望ましく、またその以下になるようにしても良い。
【0049】
前記蒸着源102が固定された棚112の重さとカウンターウェイト150の重さが同一であって棚112の自重が“0”に近ければ予期しないダメージによる自由落下が防止される。
【0050】
図8を参照すれば、真空蒸着システムの真空チャンバ10に固定設置されている第1の支持フレーム160aに第1のガイドプレート162aが固着していて、蒸着源102を持つ棚112は第1のガイドプレート162aにしたがって移動するように設置される。同じく、真空蒸着システムの真空チャンバ10に固定設置されている第2の支持フレーム160bに第2のガイドプレート162bが固着していて、カウンターウェイト150が搭載された定盤154は第2のガイドプレート162bにしたがって移動するように設置される。棚112と定盤154は連結体142を介して互いに連結される。連結体142は滑車144に巻き付きながら前記棚112の重さ方向と定盤154の重さ方向が重力方向を向けるようになる。
【0051】
この時、前記滑車144は、天井(図示しない)または前記支持フレームに回転可能に固定される。また、前記定盤154に搭載されたカウンターウェイト150は固定部材152によって堅く締結される。
【0052】
以下、本発明による蒸着源用移動装置の作用を簡単に説明する。
【0053】
蒸着源102が固定された棚112の両先端部の各々に連結体142の一端部が締結されて、この連結体142は、各々の滑車144に巻き付き、連結体142の他端部は1以上のカウンターウェイト150と締結される。
【0054】
この時、前記蒸着源102が固定された棚112とカウンターウェイト150が固定された定盤154が各々のガイドプレート132a、132bを介して移動経路が案内されることができる。
【0055】
前記カウンターウェイト150は、蒸着源102が固定された棚112の重さを最大限で軽減するようになって、一番望ましくは、誤作動または不意のダメージによる棚112の自由落下が防止されるように蒸着源102が固定された棚112の重さと同一にすることが良い。
【0056】
このように、蒸着源102が固定された棚112の重さが軽減されると駆動装置が小容量の駆動力でも易しく棚112を移動させることができる。
【0057】
図9と図10を参照すれば、本発明の他の実施例による蒸着システム用蒸着源の駆動軸密閉装置は、駆動軸114を取り囲むビーム210を持つ。ビーム210には下記に説明する棚の結合部と連結部が収容されることができる内部空間が形成される。ビーム210の一側面には下記に説明する棚112が上下方向に移動するように開放されていて、これによって開放端部が形成される。
【0058】
棚112は、駆動軸114に結合する結合部126と、蒸着源20が装着される支持板222と、結合部126と支持板222を連結して所定の大きさの貫通口124aが形成されている連結部124とを有する。
【0059】
連結部124の貫通口124aには板状構造の遮断板230;図面の簡略化のために点線で表示するが貫通されて提供される。
【0060】
結合部126には駆動軸114が貫通する穴126aが形成されて、穴126aは駆動軸114にギアー結合方式で締結されて駆動軸114が駆動手段(図示しない)によって回転すると、結合部126は駆動軸114にしたがって上下方向に移動するようになる。
【0061】
駆動軸114が位置するビーム210の内部空間には棚112の結合部126と連結部124が移動可能に収容される。ビーム210の内部空間を限定する内側面には外側に延ばす溝が前記開放端部に接して上下方向に形成される。棚112の連結部124には前記溝に対応する外向突起が提供される。この時、貫通口124aは前記外向突起が形成された部位に提供される。そして、棚112において、外向突起と支持板222の間には凹溝が形成されて、ビーム210の開放端部は前記凹溝に挿入される羽部として作用する。
【0062】
したがって、駆動軸114が結合部126の穴126aに挿入されて、ビーム210の羽部が棚112の凹溝に挿入されて、連結部124の外向突起はビーム210の溝に挿入されることで棚112の結合部126と連結部124はビーム210の内部空間に位置するようになる。この時、遮断板230が連結部124の貫通口124aに挿入されることで駆動軸114は外部から密閉される。そして、棚112の支持板222はビーム210の外部に露出する。
【0063】
図11に示したように、本発明の実施例による駆動軸密閉装置が設置されている蒸着システムにおいて、真空チャンバ10の一側には基板30とマスク40を整列された状態で支持するチャック50が提供される。真空チャンバ10の他側には駆動軸114がビーム210の内部空間に提供されて、このような状態で遮断板230によって密閉された状態で維持される。ビーム210の開放端部を介して露出している棚112の支持板222上には蒸着機102が搭載される。
【0064】
駆動手段(図示しない)の作動によって駆動軸114が軸回転するようになって、これと連動して棚112の支持板222はビーム210の開放端部にしたがって垂直上下方向に移動する。そして、真空チャンバ10で蒸着機102から基板30を向けて噴射される有機気相物質が飛散されても、遮断板230とビーム210によって飛散される有機気相物質が駆動軸114に付着することを効果的に防止するようになる。
【0065】
一方、図12を参照すれば、本発明の他の実施例による蒸着システム用蒸着源の駆動軸密閉装置は駆動軸114に結合する結合部226と、結合部226に連結されて蒸着源が搭載される支持板222を持つ支持体112を含む。結合部226を中心としてその上部に位置する駆動軸114は第1の管体230aによって取り囲まれて、その下部に位置する駆動軸114は第2の管体230aによって取り囲まれる。
【0066】
望ましくは、第1の管体230aの下部は結合部226の上部面に固定されて、第2の管体230bの上部は結合部226の下部面に固定される。また、第1の管体230aの上部は真空チャンバ10の上部面に固定されて第2の管体230bの下部は真空チャンバ10の下部面に固定される。よって、駆動軸114は第1の管体及び第2の管体230a、230bと、支持体112の結合部226に密閉された状態で維持される。
【0067】
第1の管体と第2の管体230a、230bは駆動手段(図示しない)によって駆動軸114が回転することによって結合部226が上下方向に移動する間には駆動軸114を効果的に外部から密閉させるために長さの伸縮可能な構造を持つことが望ましい。例えば、第1の管体と、第2の管体230a、230bはベローズ管状の外形を持つことが望ましい。
【0068】
図13aを参照すれば、本発明の他の実施例による駆動軸密閉装置が設置されている蒸着システムにおいて、真空チャンバ10の一側には基板30とマスク40を整列された状態で支持するチャック50が提供される。真空チャンバ10の他側には駆動軸114が提供されて、駆動軸114には結合部226を介して垂直上下方向に移動可能になるように支持体112が結合される。
【0069】
支持体112は有機物質が保存されている蒸着機102が搭載される支持板222を持つ。支持体112の結合部226を中心としてその上部に位置する駆動軸114には第1の管体230aが提供される一方、その下部に位置する駆動軸114には第2の管体230bが提供される。
【0070】
蒸着機102が真空チャンバ10のバッファー領域Aに位置するように支持体112が駆動軸114の下部に提供された状態で、第1の管体230aは最大の長さに伸長されている一方、第2の管体230bは最小の長さに縮小される。この位置で蒸着機102は有機物質を蒸発させて有機気相物質を形成するように予熱され、またこのような有機気相物質の蒸着率が目標値に到逹するまで待機する。
【0071】
図13bに示したように、蒸着源20から噴射される有機気相物質の蒸着率が目標値に到逹すると、駆動手段(図示しない)の作動によって駆動軸114が軸回転して支持体112は移動する。結果的に、支持体112の支持板222上に搭載されている蒸着機102は真空チャンバ10の成膜領域Bに位置する。この時、蒸着機102から有機気相物質が噴射されて真空チャンバ10内の基板30に有機物層を形成する。
【0072】
一方、蒸着機102が真空チャンバ10の成膜領域Bに位置するように支持体112を移動させた状態で、第1の管体230aは少し縮小されて、また第2の管体230bは少し伸長される。
【0073】
したがって、管体230a、230bは支持体112の移動方向に連動して長さが伸縮するので、管体230a、230b及び結合部226によって駆動軸114は外部から密閉されて、支持体112の支持板222上に搭載されている蒸着機102から噴射される有機気相物質が真空チャンバ10内で飛散しても、飛散する有機気相物質が駆動軸114に接触することを効果的に遮断する。
【0074】
本発明によると、有機気相物質を噴射する蒸着源を上下方向に移動させる駆動軸を真空チャンバ内に密閉された状態で維持するので、噴射される有機気相物質が真空チャンバ内で飛散して駆動軸に付着することを防止して蒸着源が円滑に上下方向に移動するようにする。
【0075】
また、本発明によると、再移動される棚の停止された位置確認によって棚の初期移動の時の衝突が防止され、自動時の間違って入力されたデータによる棚の追突及び、受動時の作業者の間違いによる棚の追突などがあらかじめ防止されることができるとともに、持続的な棚の移動距離の検知を通じて、連続された繰り返し作業をする棚の正確な移動の間違いが検出されてこの検出データによって棚及び駆動部の微細な再調整がなされることができることは勿論、棚が自由落下されるか、または一方向で慣性力によって超過移動されると追突危機の棚が離隔される方向に移動してその追突の被害が減少されることができる効果がある。
【0076】
また、本発明によると、前記にように構成された本発明により、蒸着源及び棚の全体の重さが顕著に低減されて、重量の自重が低減された、すなわち、軽量の棚を往復移動させるための駆動装置の駆動力も小容量に転換されることができるとともに、カウンターウェイトと蒸着源が固定された棚の重さが同一となると予想出来ない棚の位置離脱及び自由落下があらかじめ除去される効果がある。
【0077】
前記の内容は、本発明の望ましい実施例を例示したことであって、本発明が属する分野の当業者であれは、添付された請求範囲に記載した本発明の思想及び要旨を逸脱しない範囲で本発明に対する修正及び変更を加えることができるということを認識しなければならない。
【符号の説明】
【0078】
A バッファー領域
B 成膜領域
10 真空チャンバ
20 蒸着源
30 基板
40 マスク
50 チャック
100 蒸着源用追突防止装置
102 蒸着源
110 駆動部
112 支持体
112a、112b 棚
114 駆動軸
122 センサー
124 連結部
124a 貫通口
126 結合部
126a 結合部の穴
130 制御部
142 連結体
144 滑車
150 カウンターウェイト
152 固定部材
154 定盤
160a 第1の支持フレーム
160b 第2の支持フレーム
162a 第1のガイドプレート
162b 第2のガイドプレート
210 ビーム
222 支持板
226 結合部
230 遮断板
230a 第1の管体
230b 第2の管体
【特許請求の範囲】
【請求項1】
駆動源と、駆動源によって動作するように設置された駆動軸と、前記駆動軸に垂直往復移動するように設置された1以上の棚と、この棚に固定された蒸着機が含まれてなる駆動部と、
前記隣接した棚の距離が検知されるように設置されたセンサーが含まれてなる検知部と、
前記検知部のセンサーから収集されたデータと前もって設定されたデータを比べて駆動部の作動を制御する制御部と、
が具備されてなることを特徴とする蒸着源用追突防止装置。
【請求項2】
前記センサーは距離測定用超音波センサー、光センサー、光ファイバーセンサー、赤外線センサー、紫外線センサー、光ファイバセンサーの中で選択された1つであることを特徴とする請求項1に記載の蒸着源用追突防止装置。
【請求項3】
前記制御部は前もって設定された棚間の距離と実際の棚間の距離が同一であれば駆動部の動作を停止させるようになることを特徴とする請求項1に記載の蒸着源用追突防止装置。
【請求項4】
前記制御部は前もって設定された棚間の距離と実際の棚間の距離が同一であれば駆動部の動作を停止させるようになることを特徴とする請求項2に記載の蒸着源用追突防止装置。
【請求項5】
前記制御部は前もって設定された棚間の距離と実際の棚間の距離が同一であれば棚の動作が転換されるように駆動部を制御するようになることを特徴とする請求項1に記載の蒸着源用追突防止装置。
【請求項6】
前記制御部は前もって設定された棚間の距離と実際の棚間の距離が同一であれば棚の動作が転換されるように駆動部を制御するようになることを特徴とする請求項2に記載の蒸着源用追突防止装置。
【請求項1】
駆動源と、駆動源によって動作するように設置された駆動軸と、前記駆動軸に垂直往復移動するように設置された1以上の棚と、この棚に固定された蒸着機が含まれてなる駆動部と、
前記隣接した棚の距離が検知されるように設置されたセンサーが含まれてなる検知部と、
前記検知部のセンサーから収集されたデータと前もって設定されたデータを比べて駆動部の作動を制御する制御部と、
が具備されてなることを特徴とする蒸着源用追突防止装置。
【請求項2】
前記センサーは距離測定用超音波センサー、光センサー、光ファイバーセンサー、赤外線センサー、紫外線センサー、光ファイバセンサーの中で選択された1つであることを特徴とする請求項1に記載の蒸着源用追突防止装置。
【請求項3】
前記制御部は前もって設定された棚間の距離と実際の棚間の距離が同一であれば駆動部の動作を停止させるようになることを特徴とする請求項1に記載の蒸着源用追突防止装置。
【請求項4】
前記制御部は前もって設定された棚間の距離と実際の棚間の距離が同一であれば駆動部の動作を停止させるようになることを特徴とする請求項2に記載の蒸着源用追突防止装置。
【請求項5】
前記制御部は前もって設定された棚間の距離と実際の棚間の距離が同一であれば棚の動作が転換されるように駆動部を制御するようになることを特徴とする請求項1に記載の蒸着源用追突防止装置。
【請求項6】
前記制御部は前もって設定された棚間の距離と実際の棚間の距離が同一であれば棚の動作が転換されるように駆動部を制御するようになることを特徴とする請求項2に記載の蒸着源用追突防止装置。
【図1】


【図2】
【図3】
【図4】
【図5a】
【図5b】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13a】
【図13b】
【図2】
【図3】
【図4】
【図5a】
【図5b】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13a】
【図13b】
【公開番号】特開2009−114549(P2009−114549A)
【公開日】平成21年5月28日(2009.5.28)
【国際特許分類】
【出願番号】特願2009−42739(P2009−42739)
【出願日】平成21年2月25日(2009.2.25)
【分割の表示】特願2005−347029(P2005−347029)の分割
【原出願日】平成17年11月30日(2005.11.30)
【出願人】(308040351)三星モバイルディスプレイ株式會社 (764)
【Fターム(参考)】
【公開日】平成21年5月28日(2009.5.28)
【国際特許分類】
【出願日】平成21年2月25日(2009.2.25)
【分割の表示】特願2005−347029(P2005−347029)の分割
【原出願日】平成17年11月30日(2005.11.30)
【出願人】(308040351)三星モバイルディスプレイ株式會社 (764)
【Fターム(参考)】
[ Back to top ]