
蒸着装置用ワーク移動機構とこれを用いた蒸着方法
【課題】装置自体の大型化を招来することなく、一度に載置するワーク数を増加させられるようにする。
【解決手段】本発明は、ターゲット20,21による蒸着位置を含む一定の公転経路上に沿って、複数のワークPそれぞれを自転させながら移動させる蒸着装置用ワーク移動機構Bにおいて、上記隣り合うワークP,Pどうしを、これらの自転領域を重なり合わせ、かつ、互いに干渉しない姿勢に保持しているとともに、それら隣り合うワークP,Pを互いに逆回転させながら公転経路上を移動させる。
【解決手段】本発明は、ターゲット20,21による蒸着位置を含む一定の公転経路上に沿って、複数のワークPそれぞれを自転させながら移動させる蒸着装置用ワーク移動機構Bにおいて、上記隣り合うワークP,Pどうしを、これらの自転領域を重なり合わせ、かつ、互いに干渉しない姿勢に保持しているとともに、それら隣り合うワークP,Pを互いに逆回転させながら公転経路上を移動させる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、例えば蒸着装置のワークを装着するのに適した、自転と公転の両方を行わせる蒸着装置用ワーク移動機構とこれを用いた蒸着方法に関するものである。
【背景技術】
【0002】
この種の蒸着装置用ワーク移動機構として、特許文献1に「回転台車」とした名称において開示された構成のものがある。
特許文献1に開示されている回転台車は、回転自在の公転台と、公転台に回転自在に取り付けられた自転台と、自転台に装着された第1磁石と、公転台の回転に伴って第1磁石と吸着を行う第2磁石とを有しているとともに、上記 第1磁石に対向して自転台の回転位置を調整するための補助磁石を設けた構成のものである。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2002‐293427号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、蒸着処理のリードタイムを短縮するために、回転台車に一度に載置するワークの数を増加させたいとの要請がある。
これに対し、上記公転台の直径を大きくすれば対応することもできるが、現状の回転台車では、公転台の直径を大きくすることは、蒸着装置のチャンバーサイズによって制限されるために困難である。
【0005】
一方、公転台の直径を維持したまま、ワークを載置する数を増加させようとすると、隣り合うワークどうしが自転したときに互いに接触して干渉するという課題が未解決のままである。
【0006】
そこで本発明は、蒸着装置自体の大型化を招来することなく、一度に蒸着処理するワークの数量を増加できる蒸着装置用ワーク移動機構とこれを用いた蒸着方法の提供を目的としている。
【課題を解決するための手段】
【0007】
上記課題を解決するための本発明に係る蒸着装置用ワーク移動機構は、ターゲットによる蒸着位置を含む一定の公転経路上に沿って、複数のワークそれぞれを自転させながら移動させるものであり、上記隣り合うワークどうしを、これらの自転領域を重なり合わせ、かつ、互いに干渉しない姿勢に保持しているとともに、それら隣り合うワークを互いに逆回転させながら公転経路上を移動させている。
【0008】
同上の課題を解決するための本発明に係る蒸着方法は、上記の蒸着装置用ワーク移動機構を用いたものであり、それら隣り合うワークどうしを、これらの自転領域を重なり合わせ、かつ、互いに干渉しない姿勢に保持しているとともに、それら隣り合うワークを互いに逆回転させながら公転経路上を移動させることを特徴としている。
【0009】
上記の構成においては、ターゲットによる蒸着位置を含む一定の公転経路上に沿って、複数のワークそれぞれを自転させながら移動させる。
移動の際、上記隣り合うワークどうしを、これらの自転領域を重なり合わせ、かつ、互いに干渉しない姿勢に保持して、それら隣り合うワークを互いに逆回転させながら公転経路上を移動させている。
【発明の効果】
【0010】
本発明によれば、蒸着装置自体の大型化を招来することなく、一度に蒸着処理するワーク数を増加することができる。
【図面の簡単な説明】
【0011】
【図1】本発明の一実施形態に係るワーク移動機構を用いた一例に係る蒸着装置の斜視図である。
【図2】同上の一例に係る蒸着装置の平面図である。
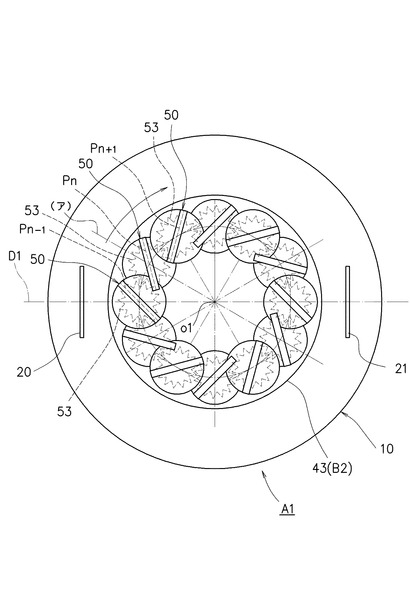
【図3】図2に示す初期位置におけるワークを所定角度だけ自転させた様子を示す平面図である。
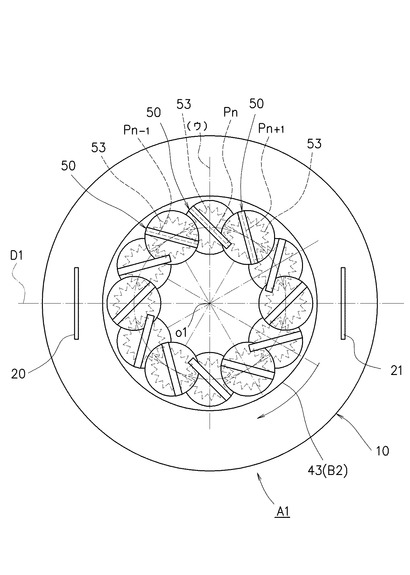
【図4】図3に示すワークをさらに所定角度だけ自転させた様子を示す平面図である。
【図5】図4に示すワークをさらに所定角度だけ自転させた様子を示す平面図である。
【発明を実施するための形態】
【0012】
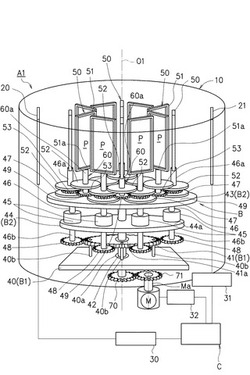
以下に、本発明を実施するための形態について、図面を参照して説明する。図1は、本発明の一実施形態に係るワーク移動機構を用いた一例に係る蒸着装置の斜視図、図2は、その蒸着装置の平面図である。
【0013】
一例に係る蒸着装置A1は、チャンバー10の内部に、本発明の一実施形態に係るワーク移動機構Bとターゲット20,21とを設けているとともに、そのチャンバー10の外部に、電源装置30,31、モータドライバ32及びコントローラCを配設した構成のものである。
【0014】
チャンバー10は、これの内部にワーク移動機構Bを配設するための所要の容積にした円筒形に形成されている。
ターゲット20,21は、チャンバー10の軸心O1を通る一直径線D1上であって、ワーク移動機構Bを挟む両側に対向させて配設しており、ターゲット20,21による蒸着中心位置を(a),(b)で示している。
【0015】
各ターゲット20,21には、これを励起するための上記電源回路30,31が接続されており、また、それら電源回路30,31は後記するコントローラCの出力側に接続されている。
【0016】
ワーク移動機構Bは、ターゲット20,21による蒸着中心位置(a),(b)を含む一定の公転経路c(図2参照)上に沿い、複数のワークPそれぞれを自転させながら移動させるものである。
【0017】
このワーク移動機構Bは、基板40と大ギヤ41からなる固定部B1、及び主軸42、ターンテーブル43、ワーク保持部50及びモータ取付け台44を有してなる可動部B2からなる。
本実施形態において示す「一定の公転経路c」は一円周を例示しているが、これに限るものではなく、ターゲット20,21による蒸着位置を含む経路となっていればよい。
【0018】
基板40は、所要の厚みにした平面視正方形にしたものであり、チャンバー10の軸心O1に一致する位置には、主軸42を遊挿するための軸遊挿孔40aが形成されている。
大ギヤ41は、軸心O1を中心として配設されており、その軸心O1に一致して軸遊挿孔41aが形成されている。
【0019】
上記大ギヤ41は、基板40の軸遊挿孔40a(軸心O1)を中心とする90度間隔に配設された4本の支持部材40bによって、その基板40の上部に所要の間隔をおいて支持固定されている。
【0020】
モータ取付け台44は、大ギヤ41と所要の間隔をおいて、その上側位置において主軸42に固定されている。
このモータ取付け台44は、主軸42を中心とした平面視円形に形成されており、これの上面44aには、その主軸42(軸心O1)を中心とした60度間隔にして6個の軸受45が同一円周上に配置されている。
【0021】
各軸受45には、駆動回転軸46が回転自在にそれぞれ軸支されている。
各駆動回転軸46は、これの上端部46aがターンテーブル43に形成された駆動軸受47の上側に突出され、これに上記ワーク保持部50が形成されている。
また、駆動回転軸46の下端部46bが上記大ギヤ41と同じ高さ位置となるように下方に延出して形成され、これに大ギヤ41と噛合する小ギヤ48が固定されている。
【0022】
ターンテーブル43は、平面視において円形に形成されているとともに、駆動軸受47と従動軸受49とが30度間隔で交互に配設されている。
従動軸受49には、従動回転軸60の下端部が回転自在に軸支されているとともに、上端部に下記のワーク保持部50が形成されている。
【0023】
ワーク保持部50は、駆動回転軸46及び受動回転軸60の各上端部46a,60aに形成されており、それは、保持枠51、蒸着防止板52及び自転用ギヤ53からなる。
保持枠51は、ワークPを囲繞保持できる縦長方形に形成されているとともに、これの下枠材51aに駆動回転軸46又は従動回転軸60の各上端部46a,60aが固定されている。
【0024】
保持枠51は、大小様々なワークPを共通に囲繞保持できるように、想定される最も大きいワークPを囲繞保持できる大きさに形成している。
本実施形態において示すワークPは、図示しない燃料電池ユニットに用いられる長方形のセパレータであるが、これに限るものではない。
蒸着防止板52と自転用ギヤ53とは、駆動回転軸46及び従動回転軸60の上端部46a,60a近傍に固定されている。
【0025】
蒸着防止板52は、自転用ギヤ53よりも大きな直径にした円形のものであり、その自転用ギヤ52の上側に位置させている。これにより、後述するターゲット20,21により蒸着される材料が自転用ギヤ53に付着しないようにしたものである。
【0026】
自転用ギヤ53はワーク保持部50、従ってまた、ワークPを自転させるためのものであり、隣り合う駆動回転軸46と従動回転軸60の各自転用ギヤ53,53が互いに噛合するように形成されている。
【0027】
駆動回転軸46に支持されている各保持枠51は、図2に示すように、軸心O1を通る直径線D1に対して直角となる角度にして、また、従動回転軸60に支持されている各保持枠51は、軸心O1を通る直径線D2に一致する角度にして支持されている。
【0028】
換言すると、上記隣り合う保持枠51,51どうしを、これらの自転領域を重なり合わせ、かつ、互いに干渉しない姿勢に保持している。
すなわち、上記したように、保持枠51はもっとも大きなワークPよりも大きく形成されているので、これら隣り合う保持枠51,51どうし、従ってまた、隣り合うワークP,Pどうしが、これらを正逆回転させたときに互いに干渉しないように配列している。
【0029】
「自転領域を重なり合わせる」とは、隣り合う保持枠51,51の幅を「W1」としたとき、駆動回転軸46と従動回転軸60との幅W2を幅W1よりも小さく設定していることを意味している。これにより、ターンテーブル43の外径を大きくすることなく、より多くのワークPを載置することができるようにしている。
【0030】
一方、自転領域を重なり合わせた上記の配列状態において、各保持枠51を同一の方向に回転させると、隣り合う保持枠51,51どうし、従ってまた、ワークP,Pが干渉して回転させることができない。
そこで、上記隣り合うワークP,Pどうしを、互いに干渉しない姿勢に保持しているとともに、それら隣り合うワークP,Pを互いに逆回転させるようにしているのである。
【0031】
本実施形態において、上記のように保持したワークP,Pは、蒸着中心位置(a),(b)を通過するときには、図2等に示すように、ターゲット20,21に正対するようになっているが、上記蒸着中心位置(a),(b)において必ずしも正対させる必要はない。
すなわち、何周か公転する間に自転軸も回転し、その間にターゲット20,21の方を向いて通過すればよい。
【0032】
主軸42は、これの上端部にターンテーブル43が固定されており、下端部は、基板40よりも下方に延出して形成され、これの下端部に小ギヤ70が取り付けられている。
小ギヤ70には、単一の駆動源であるモータMの出力軸Maに固定した小ギヤ71が噛合している。
モータMは、モータドライバ32を介してコントローラCの出力側に接続され、適宜回転制御されるようになっている。
【0033】
コントローラCは、CPU(Central Processing Unit)、インターフェース回路及びメモリ(いずれも図示しない)等からなるものであり、そのメモリに記憶されている所要のプログラムの実行により、所要の機能を発揮するようになっている。
【0034】
次に、図3〜5を参照してワーク移動機構Bの動作について説明する。図3は、図2に示す初期位置におけるワークを所定角度だけ自公転させた様子を示す平面図、図4は、図3に示すワークをさらに所定角度だけ自公転させた様子を示す平面図、図5は、図4に示すワークをさらに所定角度だけ自公転させた様子を示す平面図である。
【0035】
まず、上記した構成からなる蒸着装置A1を用いた蒸着方法は、隣り合うワークP,Pどうしを、これらの自転領域を重なり合わせ、かつ、互いに干渉しない姿勢に保持しているとともに、それら隣り合うワークを互いに逆回転させながら公転経路c上を移動させることを内容としたものであり、その詳細は次のとおりである。
【0036】
モータMを駆動すると、これの駆動力が小ギヤ71,70を介して主軸42,大ギヤ41及び小ギヤ48に伝達されて、ターンテーブル43が矢印方向に回転され始める。
ターンテーブル43が矢印方向に回転し始めると、駆動回転軸46上のワークPnは、平面視において反時計回りに、また、そのワークPnの隣り合う従動回転軸60,60上のワークPn−1,Pn+1は、自転用ギヤ53により時計回りに回転を始める。
【0037】
図2に示す初期位置から、ターンテーブル43が矢印方向に所定の角度回転して公転位置(ア)に移動すると、図3に示すように、直径線D1に対して直交する姿勢にしていたワークPnは、平面視において反時計回りに所定の角度だけ回動する。一方、そのワークPnに前後して隣り合うワークPn−1,Pn+1は、平面視において時計回りに所定の角度だけ回動する。
【0038】
図3に示す位置から、ターンテーブル43が矢印方向にさらに所定の角度回転して公転位置(イ)に移動すると、図4に示すように、ワークPnは平面視において反時計回りに所定の角度だけ回動して、直径線に一致する姿勢に回転する。
一方、当該ワークPn−1,Pn+1は、平面視において時計回りに所定の角度だけ回動する。
【0039】
図4に示す位置から、ターンテーブル43が矢印方向にさらに所定の角度回転して公転位置(ウ)に移動すると、図5に示すように、ワークPnは平面視において反時計回りに所定の角度だけ回動する。
一方、当該ワークPn−1,Pn+1は、平面視において時計回りに所定の角度だけ回動する。
そして、さらにターンテーブル43が矢印方向にさらに所定の回転だけ回転すると、図2に示す初期の姿勢に復帰する。
【0040】
上述した実施形態に係る蒸着装置用ワーク移動機構Bによれば、次の効果を得ることができる。
・蒸着装置自体の大型化を招来することなく、一度に蒸着処理するワーク数を増加することができる。
・ターゲットに正対させるように、ワークを起立姿勢に保持するワーク保持部を有しているので、占有面積を小さくすることができる。
・ターンテーブルを公転させながら、ワークを自転させているのでワークに均一な厚みの膜をコーティングできる。
・単一の駆動源により、ターンテーブル及びワークを自公転させているので、単純な構成にすることができ、また、これにより製造コストを低減させられる。
【0041】
なお、本発明は上述した実施形態に限るものではなく、次のような変形実施が可能である。
・上記の実施形態においては、一対のターゲットが互いに同一の材料から形成した例について説明したが、互いに異なる材料からなるものとしてもよい。この場合、ワークに異なる膜を蒸着させることができる。
【0042】
・上記の実施形態においては、ターンテーブル及びワークを単一の駆動源により自公転させた例について説明したが、各保持枠毎に個別にモータを配設するとともに、例えばターゲットとの相対的な位置関係を勘案して、それらの自転速度等を増減させるようにしてもよい。
・上記の実施形態においては、ターンテーブル上にワークを平面的に配列した例について示したが、上下方向に2段以上にしてワークを保持するようにしてもよい。
【符号の説明】
【0043】
20,21 ターゲット
50 ワーク保持部
A1 蒸着装置
B ワーク移動機構
c 公転経路
P ワーク
M 駆動源
【技術分野】
【0001】
本発明は、例えば蒸着装置のワークを装着するのに適した、自転と公転の両方を行わせる蒸着装置用ワーク移動機構とこれを用いた蒸着方法に関するものである。
【背景技術】
【0002】
この種の蒸着装置用ワーク移動機構として、特許文献1に「回転台車」とした名称において開示された構成のものがある。
特許文献1に開示されている回転台車は、回転自在の公転台と、公転台に回転自在に取り付けられた自転台と、自転台に装着された第1磁石と、公転台の回転に伴って第1磁石と吸着を行う第2磁石とを有しているとともに、上記 第1磁石に対向して自転台の回転位置を調整するための補助磁石を設けた構成のものである。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2002‐293427号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、蒸着処理のリードタイムを短縮するために、回転台車に一度に載置するワークの数を増加させたいとの要請がある。
これに対し、上記公転台の直径を大きくすれば対応することもできるが、現状の回転台車では、公転台の直径を大きくすることは、蒸着装置のチャンバーサイズによって制限されるために困難である。
【0005】
一方、公転台の直径を維持したまま、ワークを載置する数を増加させようとすると、隣り合うワークどうしが自転したときに互いに接触して干渉するという課題が未解決のままである。
【0006】
そこで本発明は、蒸着装置自体の大型化を招来することなく、一度に蒸着処理するワークの数量を増加できる蒸着装置用ワーク移動機構とこれを用いた蒸着方法の提供を目的としている。
【課題を解決するための手段】
【0007】
上記課題を解決するための本発明に係る蒸着装置用ワーク移動機構は、ターゲットによる蒸着位置を含む一定の公転経路上に沿って、複数のワークそれぞれを自転させながら移動させるものであり、上記隣り合うワークどうしを、これらの自転領域を重なり合わせ、かつ、互いに干渉しない姿勢に保持しているとともに、それら隣り合うワークを互いに逆回転させながら公転経路上を移動させている。
【0008】
同上の課題を解決するための本発明に係る蒸着方法は、上記の蒸着装置用ワーク移動機構を用いたものであり、それら隣り合うワークどうしを、これらの自転領域を重なり合わせ、かつ、互いに干渉しない姿勢に保持しているとともに、それら隣り合うワークを互いに逆回転させながら公転経路上を移動させることを特徴としている。
【0009】
上記の構成においては、ターゲットによる蒸着位置を含む一定の公転経路上に沿って、複数のワークそれぞれを自転させながら移動させる。
移動の際、上記隣り合うワークどうしを、これらの自転領域を重なり合わせ、かつ、互いに干渉しない姿勢に保持して、それら隣り合うワークを互いに逆回転させながら公転経路上を移動させている。
【発明の効果】
【0010】
本発明によれば、蒸着装置自体の大型化を招来することなく、一度に蒸着処理するワーク数を増加することができる。
【図面の簡単な説明】
【0011】
【図1】本発明の一実施形態に係るワーク移動機構を用いた一例に係る蒸着装置の斜視図である。
【図2】同上の一例に係る蒸着装置の平面図である。
【図3】図2に示す初期位置におけるワークを所定角度だけ自転させた様子を示す平面図である。
【図4】図3に示すワークをさらに所定角度だけ自転させた様子を示す平面図である。
【図5】図4に示すワークをさらに所定角度だけ自転させた様子を示す平面図である。
【発明を実施するための形態】
【0012】
以下に、本発明を実施するための形態について、図面を参照して説明する。図1は、本発明の一実施形態に係るワーク移動機構を用いた一例に係る蒸着装置の斜視図、図2は、その蒸着装置の平面図である。
【0013】
一例に係る蒸着装置A1は、チャンバー10の内部に、本発明の一実施形態に係るワーク移動機構Bとターゲット20,21とを設けているとともに、そのチャンバー10の外部に、電源装置30,31、モータドライバ32及びコントローラCを配設した構成のものである。
【0014】
チャンバー10は、これの内部にワーク移動機構Bを配設するための所要の容積にした円筒形に形成されている。
ターゲット20,21は、チャンバー10の軸心O1を通る一直径線D1上であって、ワーク移動機構Bを挟む両側に対向させて配設しており、ターゲット20,21による蒸着中心位置を(a),(b)で示している。
【0015】
各ターゲット20,21には、これを励起するための上記電源回路30,31が接続されており、また、それら電源回路30,31は後記するコントローラCの出力側に接続されている。
【0016】
ワーク移動機構Bは、ターゲット20,21による蒸着中心位置(a),(b)を含む一定の公転経路c(図2参照)上に沿い、複数のワークPそれぞれを自転させながら移動させるものである。
【0017】
このワーク移動機構Bは、基板40と大ギヤ41からなる固定部B1、及び主軸42、ターンテーブル43、ワーク保持部50及びモータ取付け台44を有してなる可動部B2からなる。
本実施形態において示す「一定の公転経路c」は一円周を例示しているが、これに限るものではなく、ターゲット20,21による蒸着位置を含む経路となっていればよい。
【0018】
基板40は、所要の厚みにした平面視正方形にしたものであり、チャンバー10の軸心O1に一致する位置には、主軸42を遊挿するための軸遊挿孔40aが形成されている。
大ギヤ41は、軸心O1を中心として配設されており、その軸心O1に一致して軸遊挿孔41aが形成されている。
【0019】
上記大ギヤ41は、基板40の軸遊挿孔40a(軸心O1)を中心とする90度間隔に配設された4本の支持部材40bによって、その基板40の上部に所要の間隔をおいて支持固定されている。
【0020】
モータ取付け台44は、大ギヤ41と所要の間隔をおいて、その上側位置において主軸42に固定されている。
このモータ取付け台44は、主軸42を中心とした平面視円形に形成されており、これの上面44aには、その主軸42(軸心O1)を中心とした60度間隔にして6個の軸受45が同一円周上に配置されている。
【0021】
各軸受45には、駆動回転軸46が回転自在にそれぞれ軸支されている。
各駆動回転軸46は、これの上端部46aがターンテーブル43に形成された駆動軸受47の上側に突出され、これに上記ワーク保持部50が形成されている。
また、駆動回転軸46の下端部46bが上記大ギヤ41と同じ高さ位置となるように下方に延出して形成され、これに大ギヤ41と噛合する小ギヤ48が固定されている。
【0022】
ターンテーブル43は、平面視において円形に形成されているとともに、駆動軸受47と従動軸受49とが30度間隔で交互に配設されている。
従動軸受49には、従動回転軸60の下端部が回転自在に軸支されているとともに、上端部に下記のワーク保持部50が形成されている。
【0023】
ワーク保持部50は、駆動回転軸46及び受動回転軸60の各上端部46a,60aに形成されており、それは、保持枠51、蒸着防止板52及び自転用ギヤ53からなる。
保持枠51は、ワークPを囲繞保持できる縦長方形に形成されているとともに、これの下枠材51aに駆動回転軸46又は従動回転軸60の各上端部46a,60aが固定されている。
【0024】
保持枠51は、大小様々なワークPを共通に囲繞保持できるように、想定される最も大きいワークPを囲繞保持できる大きさに形成している。
本実施形態において示すワークPは、図示しない燃料電池ユニットに用いられる長方形のセパレータであるが、これに限るものではない。
蒸着防止板52と自転用ギヤ53とは、駆動回転軸46及び従動回転軸60の上端部46a,60a近傍に固定されている。
【0025】
蒸着防止板52は、自転用ギヤ53よりも大きな直径にした円形のものであり、その自転用ギヤ52の上側に位置させている。これにより、後述するターゲット20,21により蒸着される材料が自転用ギヤ53に付着しないようにしたものである。
【0026】
自転用ギヤ53はワーク保持部50、従ってまた、ワークPを自転させるためのものであり、隣り合う駆動回転軸46と従動回転軸60の各自転用ギヤ53,53が互いに噛合するように形成されている。
【0027】
駆動回転軸46に支持されている各保持枠51は、図2に示すように、軸心O1を通る直径線D1に対して直角となる角度にして、また、従動回転軸60に支持されている各保持枠51は、軸心O1を通る直径線D2に一致する角度にして支持されている。
【0028】
換言すると、上記隣り合う保持枠51,51どうしを、これらの自転領域を重なり合わせ、かつ、互いに干渉しない姿勢に保持している。
すなわち、上記したように、保持枠51はもっとも大きなワークPよりも大きく形成されているので、これら隣り合う保持枠51,51どうし、従ってまた、隣り合うワークP,Pどうしが、これらを正逆回転させたときに互いに干渉しないように配列している。
【0029】
「自転領域を重なり合わせる」とは、隣り合う保持枠51,51の幅を「W1」としたとき、駆動回転軸46と従動回転軸60との幅W2を幅W1よりも小さく設定していることを意味している。これにより、ターンテーブル43の外径を大きくすることなく、より多くのワークPを載置することができるようにしている。
【0030】
一方、自転領域を重なり合わせた上記の配列状態において、各保持枠51を同一の方向に回転させると、隣り合う保持枠51,51どうし、従ってまた、ワークP,Pが干渉して回転させることができない。
そこで、上記隣り合うワークP,Pどうしを、互いに干渉しない姿勢に保持しているとともに、それら隣り合うワークP,Pを互いに逆回転させるようにしているのである。
【0031】
本実施形態において、上記のように保持したワークP,Pは、蒸着中心位置(a),(b)を通過するときには、図2等に示すように、ターゲット20,21に正対するようになっているが、上記蒸着中心位置(a),(b)において必ずしも正対させる必要はない。
すなわち、何周か公転する間に自転軸も回転し、その間にターゲット20,21の方を向いて通過すればよい。
【0032】
主軸42は、これの上端部にターンテーブル43が固定されており、下端部は、基板40よりも下方に延出して形成され、これの下端部に小ギヤ70が取り付けられている。
小ギヤ70には、単一の駆動源であるモータMの出力軸Maに固定した小ギヤ71が噛合している。
モータMは、モータドライバ32を介してコントローラCの出力側に接続され、適宜回転制御されるようになっている。
【0033】
コントローラCは、CPU(Central Processing Unit)、インターフェース回路及びメモリ(いずれも図示しない)等からなるものであり、そのメモリに記憶されている所要のプログラムの実行により、所要の機能を発揮するようになっている。
【0034】
次に、図3〜5を参照してワーク移動機構Bの動作について説明する。図3は、図2に示す初期位置におけるワークを所定角度だけ自公転させた様子を示す平面図、図4は、図3に示すワークをさらに所定角度だけ自公転させた様子を示す平面図、図5は、図4に示すワークをさらに所定角度だけ自公転させた様子を示す平面図である。
【0035】
まず、上記した構成からなる蒸着装置A1を用いた蒸着方法は、隣り合うワークP,Pどうしを、これらの自転領域を重なり合わせ、かつ、互いに干渉しない姿勢に保持しているとともに、それら隣り合うワークを互いに逆回転させながら公転経路c上を移動させることを内容としたものであり、その詳細は次のとおりである。
【0036】
モータMを駆動すると、これの駆動力が小ギヤ71,70を介して主軸42,大ギヤ41及び小ギヤ48に伝達されて、ターンテーブル43が矢印方向に回転され始める。
ターンテーブル43が矢印方向に回転し始めると、駆動回転軸46上のワークPnは、平面視において反時計回りに、また、そのワークPnの隣り合う従動回転軸60,60上のワークPn−1,Pn+1は、自転用ギヤ53により時計回りに回転を始める。
【0037】
図2に示す初期位置から、ターンテーブル43が矢印方向に所定の角度回転して公転位置(ア)に移動すると、図3に示すように、直径線D1に対して直交する姿勢にしていたワークPnは、平面視において反時計回りに所定の角度だけ回動する。一方、そのワークPnに前後して隣り合うワークPn−1,Pn+1は、平面視において時計回りに所定の角度だけ回動する。
【0038】
図3に示す位置から、ターンテーブル43が矢印方向にさらに所定の角度回転して公転位置(イ)に移動すると、図4に示すように、ワークPnは平面視において反時計回りに所定の角度だけ回動して、直径線に一致する姿勢に回転する。
一方、当該ワークPn−1,Pn+1は、平面視において時計回りに所定の角度だけ回動する。
【0039】
図4に示す位置から、ターンテーブル43が矢印方向にさらに所定の角度回転して公転位置(ウ)に移動すると、図5に示すように、ワークPnは平面視において反時計回りに所定の角度だけ回動する。
一方、当該ワークPn−1,Pn+1は、平面視において時計回りに所定の角度だけ回動する。
そして、さらにターンテーブル43が矢印方向にさらに所定の回転だけ回転すると、図2に示す初期の姿勢に復帰する。
【0040】
上述した実施形態に係る蒸着装置用ワーク移動機構Bによれば、次の効果を得ることができる。
・蒸着装置自体の大型化を招来することなく、一度に蒸着処理するワーク数を増加することができる。
・ターゲットに正対させるように、ワークを起立姿勢に保持するワーク保持部を有しているので、占有面積を小さくすることができる。
・ターンテーブルを公転させながら、ワークを自転させているのでワークに均一な厚みの膜をコーティングできる。
・単一の駆動源により、ターンテーブル及びワークを自公転させているので、単純な構成にすることができ、また、これにより製造コストを低減させられる。
【0041】
なお、本発明は上述した実施形態に限るものではなく、次のような変形実施が可能である。
・上記の実施形態においては、一対のターゲットが互いに同一の材料から形成した例について説明したが、互いに異なる材料からなるものとしてもよい。この場合、ワークに異なる膜を蒸着させることができる。
【0042】
・上記の実施形態においては、ターンテーブル及びワークを単一の駆動源により自公転させた例について説明したが、各保持枠毎に個別にモータを配設するとともに、例えばターゲットとの相対的な位置関係を勘案して、それらの自転速度等を増減させるようにしてもよい。
・上記の実施形態においては、ターンテーブル上にワークを平面的に配列した例について示したが、上下方向に2段以上にしてワークを保持するようにしてもよい。
【符号の説明】
【0043】
20,21 ターゲット
50 ワーク保持部
A1 蒸着装置
B ワーク移動機構
c 公転経路
P ワーク
M 駆動源
【特許請求の範囲】
【請求項1】
ターゲットによる蒸着位置を含む一定の公転経路上に沿って、複数のワークそれぞれを自転させながら移動させる蒸着装置用ワーク移動機構において、
上記隣り合うワークどうしを、これらの自転領域を重なり合わせ、かつ、互いに干渉しない姿勢に保持しているとともに、それら隣り合うワークを互いに逆回転させながら公転経路上を移動させることを特徴とする蒸着装置用ワーク移動機構。
【請求項2】
ターゲットに正対させるように、ワークを起立姿勢に保持するワーク保持部を有していることを特徴とする請求項1に記載の蒸着装置用ワーク移動機構。
【請求項3】
各ワークを単一の駆動源によって自公転させていることを特徴とする請求項1又は2に記載の蒸着装置用ワーク移動機構。
【請求項4】
請求項1〜3のいずれか1項に記載の蒸着装置用ワーク移動機構を用いた蒸着方法であって、
上記隣り合うワークどうしを、これらの自転領域を重なり合わせ、かつ、互いに干渉しない姿勢に保持しているとともに、それら隣り合うワークを互いに逆回転させながら公転経路上を移動させることを特徴とする蒸着方法。
【請求項1】
ターゲットによる蒸着位置を含む一定の公転経路上に沿って、複数のワークそれぞれを自転させながら移動させる蒸着装置用ワーク移動機構において、
上記隣り合うワークどうしを、これらの自転領域を重なり合わせ、かつ、互いに干渉しない姿勢に保持しているとともに、それら隣り合うワークを互いに逆回転させながら公転経路上を移動させることを特徴とする蒸着装置用ワーク移動機構。
【請求項2】
ターゲットに正対させるように、ワークを起立姿勢に保持するワーク保持部を有していることを特徴とする請求項1に記載の蒸着装置用ワーク移動機構。
【請求項3】
各ワークを単一の駆動源によって自公転させていることを特徴とする請求項1又は2に記載の蒸着装置用ワーク移動機構。
【請求項4】
請求項1〜3のいずれか1項に記載の蒸着装置用ワーク移動機構を用いた蒸着方法であって、
上記隣り合うワークどうしを、これらの自転領域を重なり合わせ、かつ、互いに干渉しない姿勢に保持しているとともに、それら隣り合うワークを互いに逆回転させながら公転経路上を移動させることを特徴とする蒸着方法。
【図1】



【図2】

【図3】
【図4】

【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2012−224878(P2012−224878A)
【公開日】平成24年11月15日(2012.11.15)
【国際特許分類】
【出願番号】特願2011−90936(P2011−90936)
【出願日】平成23年4月15日(2011.4.15)
【出願人】(000003997)日産自動車株式会社 (16,386)
【Fターム(参考)】
【公開日】平成24年11月15日(2012.11.15)
【国際特許分類】
【出願日】平成23年4月15日(2011.4.15)
【出願人】(000003997)日産自動車株式会社 (16,386)
【Fターム(参考)】
[ Back to top ]