
薄切片搬送装置および薄切片作製装置
【課題】薄切片を縦向き姿勢にして基板ですくい取る位置まで搬送する。
【解決手段】薄切片Mを、薄切片Mが供給される供給ポイントP1から、基板G上にすくい取る回収ポイントP2まで搬送する薄切片搬送装置13であって、供給ポイントP1と回収ポイントP2とを通過するように配設された水路2と、水路2内の液体Waを供給ポイントP1から回収ポイントP2に向けて流動させることにより、薄切片Mを回収ポイントP2に向けて搬送する流動手段3と、が備えられ、水路2には、水路幅が薄切片Mの短辺の長さW以上で、かつ長辺の長さL未満とされるとともに、少なくとも回収ポイントP2側の端部における水路幅が薄切片Mの短辺の長さWと同等とされた整列部9が備えられ、この整列部9の両側面9a、9bのうち少なくとも一方は、水路2内の液体Waの流動方向L1に沿ってスライド移動可能となっている。
【解決手段】薄切片Mを、薄切片Mが供給される供給ポイントP1から、基板G上にすくい取る回収ポイントP2まで搬送する薄切片搬送装置13であって、供給ポイントP1と回収ポイントP2とを通過するように配設された水路2と、水路2内の液体Waを供給ポイントP1から回収ポイントP2に向けて流動させることにより、薄切片Mを回収ポイントP2に向けて搬送する流動手段3と、が備えられ、水路2には、水路幅が薄切片Mの短辺の長さW以上で、かつ長辺の長さL未満とされるとともに、少なくとも回収ポイントP2側の端部における水路幅が薄切片Mの短辺の長さWと同等とされた整列部9が備えられ、この整列部9の両側面9a、9bのうち少なくとも一方は、水路2内の液体Waの流動方向L1に沿ってスライド移動可能となっている。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、生体試料が包埋された包埋ブロックを薄切して作製された薄切片を、スライドガラス等の基板上に固定させる際に使用する薄切片搬送装置および薄切片作製装置に関するものである。
【背景技術】
【0002】
従来より、理化学実験や顕微鏡観察に用いられる薄切片標本を作製する装置として、ミクロトームが一般的に知られている。この薄切片標本は、厚さが数μm(例えば、3μm〜5μm)の薄切片を、スライドガラス等の基板上に固定させたものである。ここで、ミクロトームを利用して薄切片標本を作製する一般的な方法について説明する。
まず、ホルマリン固定された生物や動物等の生体試料をパラフィン置換した後、更に周囲をパラフィンで固めて強固にして、ブロック状態の包埋ブロックを作製する。次に、この包埋ブロックを専用の薄切り装置であるミクロトームにセットして、粗削りを行う。この粗削りによって、包埋ブロックの表面が平滑面となると共に、実験や観察の対象物である包埋された生体試料の観察したい面が表面に露出した状態となる。
粗削りが終了した後、本削りを行う。これは、ミクロトームが有する切断刃により、包埋ブロックを上述した厚みでスライスする工程である。これにより、目的の面を持った薄切片を得ることができる。この際、包埋ブロックをミクロンオーダで制御し、薄くスライスすることで、薄切片の厚みを細胞レベルの厚みに近付けることができるので、より観察し易い薄切片標本を得ることができる。よって、可能な限り厚さが制御された薄い薄切片を作製することが求められている。なお、この本削りは、必要枚数の薄切片が得られるまで連続して行う。
次いで、本削りによって得られた薄切片を伸展させる伸展工程を行う。つまり、本削りによって作製された薄切片は、上述したように極薄の厚みでスライスされたものであるので、皺がついた状態や、丸まった状態(例えば、Uの字状)となってしまう。そこで、この伸展工程によって、皺や丸みを取って伸ばす必要がある。
一般的には、水とお湯を利用して伸展させている。始めに、本削りによって得られた薄切片を水に浮かべる。これにより、生体試料を包埋しているパラフィン同士のくっつきを防止しながら、薄切片の大きな皺や丸みを取ることができる。その後、薄切片をお湯に浮かべる。これにより、薄切片が伸び易くなるので、水による伸展では取りきれなかった残りの皺や、切削時に受けた圧力によって生じた歪を取ることができる。
そして、お湯による伸展が終了した薄切片をスライドガラス等の基板ですくって該基板上に載置する。なお、この時点で仮に伸展が不十分であった場合には、基板ごとホットプレート等に乗せてさらに熱を加える。これにより、薄切片をより伸展させることができる。
最後に、薄切片を乗せた基板を乾燥器内に入れて乾燥させる。この乾燥により、伸展で付着した水分が蒸発すると共に、薄切片が基板上に固定される。
その結果、薄切片標本を作製することができる。また、作製された薄切片標本は、主に生物、医学分野等で使用されている。
上述した工程は、そのほとんどの工程を、経験を積んだ熟練の作業者が行っているのが一般的であるが、一部の工程を自動で行う薄切片試料作製装置(例えば、特許文献1参照)も知られている。この薄切片試料作製装置は、セットされた包埋ブロックを切断して薄切片を作製する工程と、作製した薄切片をキャリアテープによって搬送してスライドガラス上に転写させる工程と、スライドガラスごと薄切片を伸展装置まで搬送して伸展を行う工程とを、自動的に行っている装置である。この薄切片試料作製装置を利用することで、作業者の負担を若干減らすことができる。
また、作製された薄切片を自動的に水槽に搬送する切片採取装置(例えば、特許文献2参照)も知られている。この切片採取装置を利用することで、作製した薄切片を水槽まで搬送するという一部の工程を装置で行えるので、同様に作業者の負担を若干減らすことができる。
【特許文献1】特開2004−28910号公報
【特許文献2】特開平5−273094号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
しかしながら、上述した従来の方法ではまだ以下の課題が残されていた。
初めに、高品質な薄切片標本を作製するためには、伸展が終了した薄切片をスライドガラス等の基板ですくって該基板上に載置する際に、基板の向きと薄切片の向きとを一致させる必要があった。通常、この作業は作業者が行っている。具体的には、一旦水中に基板を入れた後、水面に浮かんでいる薄切片の向きに基板の向きを合わせながら薄切片の一部を基板に接触させる。そして、ゆっくりと基板を水中から引き上げることで、基板の向きと薄切片の向きとを合わせながら、基板上に薄切片をすくい取ることができるものであった。
このように、作業者は1枚1枚薄切片の向きを合わせる必要があるので、集中力を要し、非常に手間のかかる作業であった。特に、取り扱う薄切片の数が膨大である上、水面の揺らぎ等の影響を受けて薄切片の姿勢が容易に変化するので、作業者にかかる負担が大きいものであった。
また、特許文献1および2等に記載されている装置を利用することで、作業者の負担を若干減らすことができるが、薄切片をすくい取る作業については自動化を行うことが困難であった。つまり、ロボット等を利用して自動化を行う場合には、水面に浮かんだ薄切片の位置や向き等を常に確認し、これらの情報に基づいて基板の位置や向きを制御しながら薄切片をすくい取る等の複雑な制御を行う必要がある。ところが、これを行うには高度なプログラミング制御や複雑な機械的機構等が必要とされ、現実的に実現させることが難しいものであった。そのため、薄切片の向きを確認しながら該薄切片を基板上に載置する作業に関しては、かわらず作業者が行う必要があった。
【0004】
本発明は、このような事情に考慮してなされたもので、包埋ブロックから作製された薄切片を、長辺が水路内の液体の流れに対して平行な縦向き姿勢にして、基板ですくい取る位置まで搬送することができ、作業者にかかる負担を極力減らすことができる薄切片搬送装置および薄切片作製装置を提供することを目的とする。
【課題を解決するための手段】
【0005】
上記課題を解決して、このような目的を達成するために、本発明の薄切片搬送装置は、生体試料が包埋された包埋ブロックを薄切して作製された平面視長方形状の薄切片を、該薄切片が供給される供給ポイントから、基板上にすくい取る回収ポイントまで搬送する薄切片搬送装置であって、前記供給ポイントと回収ポイントとを通過するように配設された水路と、この水路内の液体を前記供給ポイントから回収ポイントに向けて流動させることにより、前記薄切片を回収ポイントに向けて搬送する流動手段と、が備えられ、前記水路は、水路幅が供給ポイント側で前記薄切片の対角線の長さよりも大きく、回収ポイント側で前記薄切片の長辺の長さ以上かつ対角線の長さ以下となるように、供給ポイント側から回収ポイント側に向かうに従い漸次水路幅が狭くなる導入部と、水路幅が前記薄切片の短辺の長さ以上で、かつ長辺の長さ未満とされるとともに、少なくとも前記回収ポイント側の端部における水路幅が前記薄切片の短辺の長さと同等とされた整列部と、水路幅が前記薄切片の短辺の長さと同等とされた排出部と、が前記供給ポイント側から回収ポイント側に向けてこの順に連設された構成とされ、前記整列部を画成する両側面のうち少なくとも一方は、前記流動手段による前記水路内の液体の流動方向に沿ってスライド移動可能となっていることを特徴とする。
この発明では、水路内の液体が流動手段によって供給ポイントから回収ポイントに向かって流れているので、包埋ブロックを薄切して薄切片を作製した後、この薄切片を自動又は手動で供給ポイントまで搬送すると、薄切片は液体の流れに乗って自動的に回収ポイントまで搬送される。
さらに、薄切片がこのように搬送される過程において、まず、導入部内では、水路幅が供給ポイント側で薄切片の対角線の長さよりも大きく、回収ポイント側で薄切片の長辺の長さ以上かつ対角線の長さ以下となるように、供給ポイント側から回収ポイント側に向かうに従い漸次水路幅が狭くなっているので、薄切片は、例えば長辺が流れに対して平行な縦向き姿勢、あるいは長辺が流れに対して傾いた傾き姿勢、さらには長辺が流れに対して直交する横向き姿勢等といった種々の姿勢とさせられつつも、導入部内で詰まることなく整列部に搬送される。そして、整列部内では、導入部からの薄切片が前記縦向き姿勢以外の姿勢である場合には、この薄切片は、二つの隅角部分が整列部の両側面に当接した状態で、これらの両側面のうち少なくとも一方が前記流動方向に沿ってスライド移動することによって、強制的に回転させられ前記縦向き姿勢とさせられる。次に、排出部内では、前述のように水路幅が前記薄切片の短辺の大きさと同等とされているので、整列部からの前記縦向き姿勢の薄切片がこの姿勢を保持しつつ、回収ポイントまで搬送されることになる。なお、導入部から整列部に到達した薄切片が前記縦向き姿勢の場合には、この姿勢を保持しつつ前記整列部内および排出部内をこの順に流されて回収ポイントまで搬送される。
以上より、供給ポイントに供給された薄切片を前記縦向き姿勢にして回収ポイントまで搬送することができる。
これにより、回収ポイントまで搬送された薄切片を例えば手動でスライドガラス等の基板上にすくい取る場合には、従来のように1枚1枚薄切片の向きを確認しながら薄切片をすくい取る必要がないため、従来と比べ作業者にかかる負担を大幅に軽減でき、作業効率も向上することができる。さらに、回収ポイントに搬送された薄切片の姿勢を前記縦向き姿勢にすることが可能になることから、薄切片を基板上にすくい取る作業をロボット等に行わせることもでき、容易に自動化に対応することも可能になる。また、液体を利用して薄切片を搬送しているので、供給ポイントから回収ポイントまで搬送する間に、薄切片を伸展させることができる。よって、搬送と伸展とを同時に行うことができ、作業効率をより一層高めることができる。
【0006】
ここで、前記導入部における前記回収ポイント側の端部に位置する前記薄切片を撮像可能な撮像手段と、この撮像手段により得られた撮像データに基づいて、前記整列部を画成する両側面のうち少なくとも一方のスライド移動を制御する制御部と、が設けられてもよい。
この場合、撮像手段と制御部とが設けられているので、導入部における前記回収ポイント側の端部に位置する薄切片の姿勢に応じて、整列部の両側面のうち少なくとも一方のスライド移動を制御することが可能になる。
例えば、導入部における前記回収ポイント側の端部で、薄切片が前記縦向き姿勢以外の姿勢となっていた場合に限って整列部の側面をスライド移動させ、前記縦向き姿勢となっていた場合には、整列部の両側面を静止させた状態でこの整列部内を通過させるようにすることが可能になる。この場合、薄切片が導入部における前記回収ポイント側の端部では前記縦向き姿勢となっていたにもかかわらず、整列部内に進入したときに、整列部の側面を前述のようにスライド移動させたことによって整列部内での流動手段による液体の流れに乱れが生じ、薄切片の前記縦向き姿勢が崩れてしまうことを防止することができる。あるいは、導入部における前記回収ポイント側の端部で薄切片が前記縦向き姿勢以外の姿勢となっていた場合には、その傾きの程度や方向等に応じて、整列部の側面のスライド移動速度や移動方向を調整することによって、この薄切片が排出部に到達するまでに確実に前記縦向き姿勢にすることが可能になる。
【0007】
また、前記整列部の水路幅は、前記供給ポイント側から回収ポイント側に向かうに従い漸次狭くなってもよい。
この場合、薄切片が整列部内で前述のように回転させられて前記縦向き姿勢となった後、排出部に向けて流される過程で、前述の回転時に発生した慣性力等によりこの姿勢が崩れようとしても、その動作を、整列部の側面が薄切片の長辺をガイドすることによって阻止することができる。さらにまた、薄切片を整列部内で詰まらせることなく前述のように回転させて前記縦向き姿勢にすることができる。
【0008】
さらに、本発明の薄切片作製装置は、生体試料が包埋された包埋ブロックを薄切して平面視長方形状の薄切片を作製し、この薄切片を、基板上にすくい取る回収ポイントまで搬送する薄切片作製装置であって、前記供給ポイントと回収ポイントとを通過するように配設された水路、およびこの水路内の液体を前記供給ポイントから回収ポイントに向けて流動させることにより、前記薄切片を回収ポイントに向けて搬送する流動手段、を備える薄切片搬送装置と、前記供給ポイントよりも上流側に配置されるとともに、当該薄切片作製装置の上面視において、前記流動方向に対して傾斜する方向に延設された切断刃と、この切断刃よりも上流側に配置されるとともに、上面視長方形状の包埋ブロックを、長辺を前記流動方向に沿って平行に延在させた状態で保持し、前記流動方向に沿って前記切断刃に対して進退可能に設けられたカセットと、当該薄切片作製装置の上面視において、前記切断刃の延在する方向に直交する方向に延設されるとともに、前記流動方向の下流側の部分が前記導入部内に浸漬されて前記薄切片を供給ポイントに供給する無端ベルトと、が備えられ、前記水路は、水路幅が少なくとも供給ポイント側で前記薄切片の対角線の長さよりも大きい導入部と、水路幅が前記薄切片の短辺の長さ以上で、かつ長辺の長さ未満とされるとともに、少なくとも前記回収ポイント側の端部における水路幅が前記薄切片の短辺の長さと同等とされた整列部と、水路幅が前記薄切片の短辺の長さと同等とされた排出部と、が前記供給ポイント側から回収ポイント側に向けてこの順に連設された構成とされ、前記整列部を画成する両側面のうち少なくとも一方は、前記流動手段による前記水路内の液体の流動方向に沿ってスライド移動可能となっていることを特徴とする。
この発明では、包埋ブロックを保持したカセットが前記流動方向に沿って切断刃に向けて前進移動したときに、切断刃により包埋ブロックが薄切されて薄切片が作製され、この薄切片が長辺を前記流動方向に沿って平行に延在させた前記縦向き姿勢の状態で無端ベルトによって前記供給ポイントに供給され、その後、この薄切片は水路内の液体の流れに乗って回収ポイントまで搬送されることになる。これにより、薄切片を前記縦向き姿勢に保持したまま水路内で搬送し易くすることが可能になり、前述のように整列部の両側面のうち少なくとも一方が前記流動方向に沿ってスライド移動可能となっていることと相俟って、薄切片を前記縦向き姿勢にして回収ポイントまで確実に搬送することができる。
さらに、包埋ブロックがその長辺を前記流動方向に沿って平行に延在させた状態で保持されたカセットを、前記流動方向に対して傾斜する方向に延設された切断刃に向けて前記流動方向に沿って前進移動したときに薄切片が作製されるようになっているので、包埋ブロックを切断する初期の段階で、切断刃と包埋ブロックとの接触長さを短くして、この包埋ブロックに大きな変形が生ずるのを抑えることが可能になり、薄切片に皺を付けたり、丸まった状態にさせることなく高精度に作製することができる。
【0009】
さらにまた、前記導入部内における前記回収ポイント側の端部には、前記無端ベルトの前記流動方向における下流側の端部が浸漬されるとともに、前記整列部の両側面のうち、前記無端ベルトにおける前記流動方向の下流側の端部との前記流動方向に沿った距離が大きい側面に上流側から連なるガイドが設けられてもよい。
この場合、無端ベルトから供給ポイントに供給された薄切片が、導入部内における前記回収ポイント側の端部に到達したときに、無端ベルトによる薄切片の移送方向の下流側に向けてさらに移動しようとしても、この移動を前記ガイドによって阻止して整列部内に前記縦向き姿勢の状態でスムーズに進入させることが可能になる。
【発明の効果】
【0010】
この発明に係る薄切片搬送装置および薄切片作製装置によれば、包埋ブロックから作製された薄切片を、長辺が水路内の液体の流れに対して平行な縦向き姿勢にして、基板ですくい取る位置まで搬送することができ、作業者にかかる負担を極力減らすことができる。
【発明を実施するための最良の形態】
【0011】
(第1実施形態)
以下、本発明に係る薄切片作製装置の第1実施形態を、図1から図3を参照して説明する。この薄切片作製装置1は、生体試料Sが包埋された包埋ブロックBを薄切して作製された薄切片Mを、薄切片Mが供給された供給ポイントP1からスライドガラス(基板)Gにすくい取られて処理される回収ポイントP2まで搬送する装置である。
【0012】
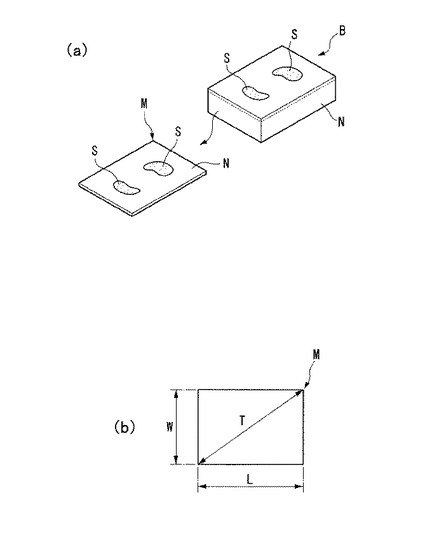
初めに、包埋ブロックBは、図1(a)に示すように、ホルマリン固定された生体試料S内の水分をパラフィン置換した後、さらに周囲をパラフィン等の包埋剤Nによって直方体状に固めたものである。これにより、生体試料Sがパラフィン内に包埋された状態となっている。なお、生体試料Sとしては、例えば、人体や実験動物等から取り出した臓器等の組織であり、医療分野、製薬分野、食品分野、生物分野等で適時選択される。
また、薄切片Mは、この包埋ブロックBを図示しない切断刃によって例えば、3μm〜5μmに薄切することで平面視長方形状に作製されたものである。なお、本実施形態では、図1(b)に示すように、長辺の長さがL、短辺の長さがW、対角線の長さがTの薄切片Mを例に挙げて説明する。
【0013】
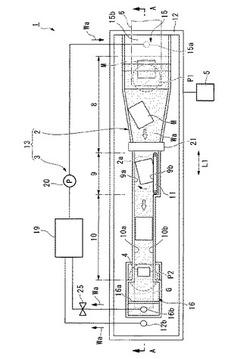
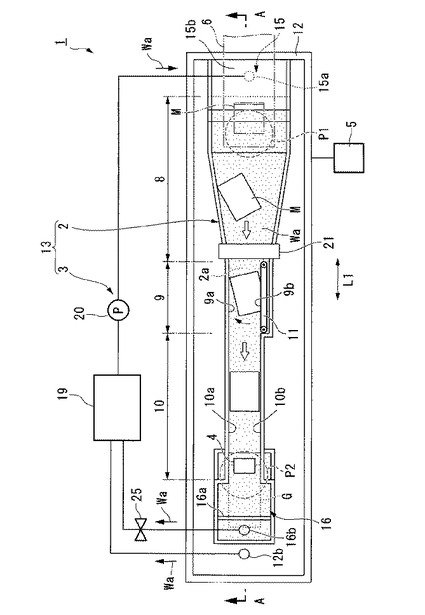
本実施形態の薄切片作製装置1は、図2および図3に示すように、供給ポイントP1と回収ポイントP2とを通過するように配設された水路2、およびこの水路2内の水(液体)Waを供給ポイントP1側から回収ポイントP2側に向けて流動させることにより、薄切片Mを回収ポイントP2に向けて搬送する流動手段3を備える薄切片搬送装置13と、供給ポイントP1よりも上流側に配置された図示されない切断刃と、この切断刃よりも上流側に配置されるとともに、包埋ブロックBを保持し、かつ前記切断刃に対して進退可能に設けられた図示されないカセットと、前記切断刃によって包埋ブロックBから薄切された薄切片Mを供給ポイントP1に供給する第1無端ベルト6と、回収ポイントP2に搬送されてきた薄切片Mを感知する感知センサ4と、回収ポイントP2に搬送された薄切片MをスライドガラスG上にすくい取る把持ロボット7と、これら各構成部品および後述する各構成部品を総合的に制御する制御部5とを備えている。
【0014】
以上より、包埋ブロックBから切断刃で薄切された薄切片Mが、第1無端ベルト6により供給ポイントP1に供給されて水路2内を通って回収ポイントP2に搬送され、その後把持ロボット7によりスライドガラスG上にすくわれるように構成されている。
【0015】
第1無端ベルト6は、その移送方向の上流側から下流側に向けて下方に向けて傾斜した状態で配置され、その下流側の部分が水路2内に浸漬している。なお、図示の例では、薄切片作製装置1の上面視において、第1無端ベルト6による薄切片Mの移送方向は、水路2内の水Waの流動方向L1と一致している。
把持ロボット7は、スライドガラスGの一端側を把持した状態で、該スライドガラスGを自在に操ることができる多関節ロボットである。この把持ロボット7は、薄切片Mが回収ポイントP2に搬送されてくるまで、スライドガラスGを、回収ポイントP2に配置された後述する第2貯水槽16内に入れた状態で待機するようになっている。そして、把持ロボット7は、回収ポイントP2に薄切片Mが搬送されてくると、この薄切片Mをすくうように作動するようになっている。
【0016】
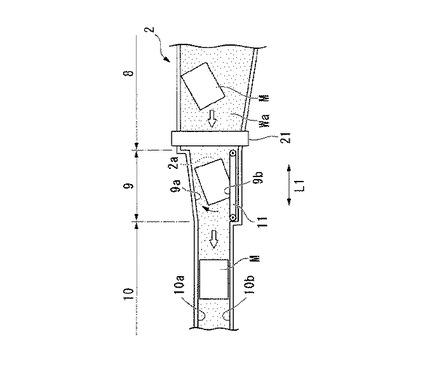
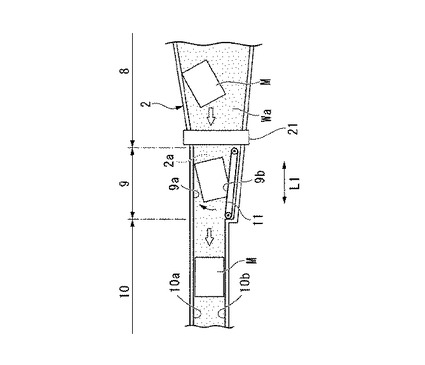
水路2は、後述する回収槽12内に設けられており、水路幅が供給ポイントP1側で薄切片Mの対角線の長さTよりも大きく、回収ポイントP2側で薄切片Mの長辺の長さL以上かつ対角線の長さT以下となるように、供給ポイントP1側から回収ポイントP2側に向かうに従い漸次水路幅が狭くなる導入部8と、水路幅が薄切片Mの短辺の長さW以上で、かつ長辺の長さL未満とされるとともに、少なくとも回収ポイントP2側の端部における水路幅が薄切片Mの短辺の長さWと同等とされた整列部9と、水路幅が薄切片Mの短辺の長さWと同等とされた排出部10と、が供給ポイントP1側から回収ポイントP2側に向けてこの順に連設された構成となっている。なお、導入部8の深さは、水路2内に浸漬された第1無端ベルト6の移送方向における下流側の端部が底面に接触しないように、供給ポイントP1の部分で局所的に深くなっている。
【0017】
そして、本実施形態では、整列部9を画成する両側面9a、9bのうち少なくとも一方は、前記流動方向L1に沿ってスライド移動可能となっている。図示の例では、整列部9内において一方の側面9aと対向する位置に、前記流動方向L1に沿って送り移動可能に支持された第2無端ベルト11が配置されている。そして、この第2無端ベルト11において整列部9の一方の側面9aと対向し、かつ前記流動方向L1に沿ってスライド移動する表面によって、整列部9の他方の側面9bが構成されている。図示の例では、整列部9の両側面9a、9b同士の間隔、つまり整列部9の水路幅は、その全長にわたって薄切片Mの短辺Wの長さと同等になっている。また、この第2無端ベルト11は、整列部9の全長にわたって連続して延設されている。さらに、整列部9の両側面9a、9bはそれぞれ、前記流動方向L1に沿って平行となっている。
【0018】
なお、第2無端ベルト11は、軸線が鉛直方向に沿って延在するように配置された一対のローラ間に巻回されている。そして、この第2無端ベルト11は、水路2内において底面2aから上端に至る全高さ領域にわたって配設されている。
さらに以上のように構成された水路2は、図3に示すように、その底面2aが回収槽12の底面12aから上方に離れて位置するように設計されている。この回収槽12は、図3に示すように、上面視長方形状に形成されており、内側に水路2と、後述する第1貯水槽15および第2貯水槽16とを完全に収容できるサイズに形成されている。また、回収槽12の上端は、水路2の上端よりも上方に位置している。
【0019】
流動手段3は、図2および図3に示すように、供給ポイントP1よりも上流側で水路2に接続された第1貯水槽15と、回収ポイントP2で水路2に接続された第2貯水槽16と、第1貯水槽15に接続され、内部を水Waが流れる供給路17と、第2貯水槽16に接続され、内部を水Waが流れる排出路18と、供給路17と排出路18とにそれぞれ接続された貯水タンク19と、供給路17に設けられ、第2貯水槽16から第1貯水槽15に向かう方向に水Waを送り出す供給ポンプ20とを備えている。
【0020】
第1貯水槽15は、回収槽12の底面12aと側面12cとの一部分を利用して形成されており、底面12aに形成された給水口15aを介して前記供給路17に接続されている。
また、本実施形態の第1貯水槽15には、第1貯水槽15に溜まった水Waの水位を一定量に規制する蓋部15bが開口を塞ぐように設けられている。そして、第1貯水槽15に供給された水Waが、この蓋部15bの裏面に接触するようになっている。
【0021】
また、この蓋部15bは、第1貯水槽15側から水路2側に延出しており、水路2の底面2aの上方にも位置するようになっている。そしてこれら水路2の底面2aと2つの側面と蓋部15bの裏面とで囲まれるスリット空間P3によって、第1貯水槽15から水路2に流れ込む水Waの流量を絞り込んで一定量に規制することができると共に、水Waの流れを整えることができるようになっている。つまり、スリット空間P3は、第1貯水槽15に隣接して設けられ、供給ポイントP1から回収ポイントP2に向けて水Waの流れを整える整流手段の機能を果たしている。
【0022】
第2貯水槽16は、回収槽12の底面12aの一部分を利用して形成されており、仕切り板16aを挟んで2部屋構造になっている。一方の部屋には、把持ロボット7によってスライドガラスGが待機している。また、他方の部屋は、底面12aに形成された排水口16bを介して排出路18に接続されている。この第2貯水槽16は、通常時では一方の部屋が水路2を流れてきた水Waで満たされている。また、仕切り板16aを越えて他方の部屋に侵入した水Waが、排水口16bを介して排出路18から排出されている。
【0023】
また、排出路18には、排出路18を閉塞するバルブ25が設けられている。このバルブ25は、制御部5によって制御されるようになっている。また、バルブ25によって排出路18を閉塞した場合には、水路2内の水位が上昇し、水路2から溢れる。そして、回収槽12がこの溢れた水Waを回収するようになっている。この回収槽12の底面12aには、第2貯水槽16と同様に排水口12bが形成されており、排水口12bに回収管路26が接続されている。この回収管路26は、貯水タンク19に接続されている。つまり、回収槽12に溢れ出た水Waは、排水口12bおよび回収管路26を介して貯水タンク19に戻るようになっている。
【0024】
感知センサ4は、図3に示すように、回収ポイントP2上に配置されており、回収ポイントP2に搬送されてきた薄切片Mを感知している。この感知センサ4は、内部にレーザ光を照射する照射部(不図示)と、回収ポイントP2に搬送されてきた薄切片Mで反射したレーザ光を受光する受光部(不図示)とを有しており、反射強度の差から薄切片Mの感知を行う非接触型のセンサである。但し、反射強度の差に限られるものではない。また、非接触型ではなく、接触により感知する接触型でも構わない。
そして感知センサ4は、薄切片Mを感知すると、感知信号を制御部5に出力してその旨を知らせるようになっている。
【0025】
制御部5は、供給ポイントP1に第1無端ベルト6によって薄切片Mが搬送されてきてから所定時間以内に感知センサ4からの感知信号を受信し、受信してから一定時間経過後にバルブ25を作動させて、排出路18を閉塞させるように制御を行っている。
さらに制御部5は、供給ポイントP1に第1無端ベルト6によって薄切片Mが供給されてきてから、所定時間経過してもまだ感知センサ4から感知信号が送られてこない場合にも、やはり同様にバルブ25を作動させて排出路18を閉塞させるように制御を行っている。
【0026】
さらに、本実施形態では、導入部8内における回収ポイントP2側の端部に位置する薄切片Mを撮像可能な撮像手段21が設けられている。この撮像手段21は、得られた撮像データを制御部5に出力し、この制御部5において撮像データに基づいて第2無端ベルト11の駆動つまり整列部9の前記他方の側面9bのスライド移動を制御するようになっている。本実施形態では、制御部5において、前記撮像データに基づいて、導入部8内における回収ポイントP2側の端部に位置する薄切片Mが、長辺が流れに対して傾いた傾き姿勢、あるいは長辺が流れに対して直交する横向き姿勢といった長辺が流れに対して平行な縦向き姿勢以外の姿勢であると判断した場合に限って、第2無端ベルト11を駆動させるようになっている。
【0027】
次に、このように構成された薄切片作製装置1により、供給ポイントP1から回収ポイントP2まで薄切片Mの向きを調整しながら搬送する場合について説明する。なお、初期状態として、第1貯水槽15、水路2および第2貯水槽16には、決められた量の水Waが既に満たされた状態となっているものとする。
【0028】
まず初めに、制御部5は、第1無端ベルト6および供給ポンプ20に信号を出力して両者を作動させる。第1無端ベルト6は、この信号を受けて切断刃によって薄切された薄切片Mの搬送を開始する。この際、制御部5は、内部タイマのカウントを開始し、感知センサ4からの感知信号の受信を待つ待機状態に移行する。一方、供給ポンプ20は、貯水タンク19に貯留されている水Waを、供給路17を介して第1貯水槽15に供給する。供給された水Waは、蓋部15bの裏面に当たって流速や乱流が抑えられた後、スリット空間P3を通過して水路2側に流れ始める。
【0029】
これにより、既に満たされている水Waが供給ポイントP1から回収ポイントP2に向かって一定の速度で流れ始める。そして、第1無端ベルト6により供給ポイントP1に搬送されてきた薄切片Mは、水Waに浸かることで第1無端ベルト6から離間して導入路8の水面に浮かぶと共に、水Waの流れに沿って移動しはじめる。
【0030】
なお、水路2を流れた水Waは、第2貯水槽16に溜まった後、排水口16bを介して排出路18を流れ、貯水タンク19に流れる。その後、再び供給ポンプ20によって供給路17を通って第1貯水槽15に流される。このように、供給ポンプ20を作動させることで水Waを循環させることができるので、無駄のない効率的な使用を行うことができる。
【0031】
水面を水路2に沿って流れはじめた薄切片Mは、まず、導入部8を通過する。この導入部8では、水路幅が供給ポイントP1側で薄切片Mの対角線の長さTよりも大きく、回収ポイントP2側で薄切片Mの長辺の長さL以上かつ対角線の長さT以下となるように、供給ポイントP1側から回収ポイントP2側に向かうに従い漸次水路幅が狭くなっているので、薄切片Mの向きは特に定まらず、長辺が流れに対して平行な縦向き姿勢、あるいは長辺が流れに対して傾いた傾き姿勢、さらには長辺が流れに対して直交する横向き姿勢等といった種々の姿勢とさせられつつも、導入部8内で詰まることなく整列部9に搬送される。
【0032】
そして、この薄切片Mは、導入部8における回収ポイントP2側の端部に到達したときに、撮像手段21によって上方から撮像され、この撮像データが制御部5に出力される。この制御部5において、前記撮像データに基づいて薄切片Mの姿勢が判断され、この判断結果が前記縦向き姿勢以外であると判断した場合には、この制御部5から信号を出力して第2無端ベルト11を駆動させて、前記他方の側面9bを前記流動方向L1の前方に向けてスライド移動させる一方、判断結果が前記縦向き姿勢であると判断した場合には、制御部5から信号を出力せずに第2無端ベルト11を駆動させない。このように、導入部8における回収ポイントP2側の端部で薄切片Mが前記縦向き姿勢となっていた場合には、前記他方の側面9bを静止させた状態でこの整列部9内を通過させることにより、前記他方の側面9bを前述のようにスライド移動させたことによって整列部9内での流動手段3による水Waの流れに乱れが生じ、薄切片Mの前記縦向き姿勢が崩れてしまうことを防止することができる。
【0033】
ここで、前記判断結果が前記縦向き姿勢以外の姿勢であって、前記他方の側面9bを前記流動方向L1の前方に向けてスライド移動させた場合には、薄切片Mは、二つの隅角部分が整列部9の両側面9a、9bにより、上方若しくは下方に向けて折り曲げられるようにして挟まれる。この状態で、前記他方の側面9bが前述のようにスライド移動すると、薄切片Mの二つの隅角部分のうち一方の側面9aに当接した一方の隅角部分の搬送速度が、他方の側面9bに当接した他方の隅角部分の搬送速度よりも小さくなることにより、前記一方の隅角部分を中心に、薄切片Mが回転させられて前記縦向き姿勢になる。
【0034】
このようにして整列部9で前記縦向き姿勢となった薄切片Mは、水路幅が薄切片Mの短辺の長さWと同等とされた排出部10に到達し、この排出部10内を両側面10a、10bにガイドされつつ前記縦向き姿勢に保持されて、回収ポイントP2に到達する。
以上のように、薄切片Mが導入部8内をどのような姿勢で流されたとしても、水路2内の水Waの前記流動方向L1に沿った流れに乗って回収ポイントP2に到達するまでの間に、前記縦向き姿勢とすることができるようになっている。
【0035】
次いで、回収ポイントP2に薄切片Mが流れてくると、感知センサ4が薄切片Mを感知して感知信号を制御部5に出力する。制御部5は、感知信号を受信すると、内部タイマのカウントを停止すると共に、その間に要した時間が予め決められた所定時間内であるか否かを判断する。ここで、所定時間内であった場合には、制御部5は薄切片Mが水路2の途中で詰まる等の不具合もなく確実に搬送されてきたと判断し、把持ロボット7にすくい上げを開始する旨の信号を出力する。そして把持ロボット7は、制御部5からの信号を受けて、スライドガラスGを第2貯水槽16から引き上げる。ここで薄切片Mは、制御部5が把持ロボット7に信号を出力する間も流れているので、回収ポイントP2で待機しているスライドガラスGに接触した状態となっている。これにより、把持ロボット7がスライドガラスGを引き上げることで、薄切片Mを確実にすくい上げることができ、スライドガラスG上に薄切片Mを載置することができる。
【0036】
特に、薄切片Mを前記縦向き姿勢にして回収ポイントP2に到達させているので、把持ロボット7の作動を単純化することができる。つまり、薄切片Mの向きを確認しながら薄切片Mをすくい取る等といった複雑な作動を把持ロボット7に求める必要がない。単に、搬送されてきた薄切片Mをすくい取るだけの単純な作動を把持ロボット7に行わせるだけで、確実にスライドガラスGの向きと薄切片Mの向きとを同じ方向に一致させることができる。従って、薄切片Mをすくい取る作業を、容易に把持ロボット7に行わせることができ、自動化に対応することができる。その結果、1枚1枚薄切片Mの向きを確認しながら作業者が手作業ですくい取っていた従来の方法に比べて、作業者にかかる負担を大幅に軽減でき、作業効率を格段に向上することができる。
【0037】
また、水Waを利用して薄切片Mを搬送しているので、供給ポイントP1から回収ポイントP2まで搬送する間に、薄切片Mを伸展させることができる。よって、搬送と伸展とを同時に行うことができ、作業効率を高めることができる。
また、第1貯水槽15には蓋部15bが設けられているので、水Waの水位を一定量に規制することができる。また、水面が過度に泡立つことを防止できるので、水Waに気泡が混入したり、水流が乱れたりし難い。そのため、薄切片Mを安定した状態で回収ポイントP2まで搬送することができる。更に、第1貯水槽15に隣接してスリット空間P3が設けられているので、第1貯水槽15から水路2に流れる水Waの流れをさらに安定させることができ、層流に近い状態で水Waを流すことができる。そのため、さらに安定した状態で薄切片Mを搬送することができる。
【0038】
また、制御部5は、感知信号を受けてから一定時間が経過した後、薄切片Mの処理(上述したすくい取り処理)が回収ポイントP2で終了したと判断して、バルブ25に作動信号を送る。バルブ25は、この作動信号を受けて排出路18を閉塞する。すると、第2貯水槽16内の水Waが排出路18を通って排出されないので、徐々に水位が上昇する。そして、ついには水路2から水Waが溢れ出す(オーバーフロー)。これにより、先ほど搬送した薄切片Mに付着していた塵埃等を水路2外に排除することができる。
このように、薄切片Mを1枚処理する毎に、水Waを水路2外に溢れさせて塵埃等を排除するので、水路2内の水Waを常に清浄に維持することができる。よって、薄切片Mの詰まりや塵埃等が溜まってしまうことを未然に防止することができる。
【0039】
また、排除された塵埃等は、溢れ出た水Waと共に回収槽12に回収され、排水口12bを介して回収管路26を通った後、貯水タンク19に流れる。また、回収した水Waを、供給ポンプ20によって再度第1貯水槽15に供給することができる。そのため、水Waを無駄にすることなく、有効利用することができる。
【0040】
そして、制御部5は、一定時間上記オーバーフローを行わせた後、バルブ25に再度作動信号を送って、排出路18の閉塞を解除させる。これにより、水位が徐々に減少して再度元の水位となる。その後制御部5は、次の薄切片Mを搬送してくるように第1無端ベルト6に信号を送って作動させる。そして、上述した動作を繰り返して、次の薄切片Mを回収ポイントP2まで搬送すると共に、スライドガラスG上に載置させる。これを複数回繰り返すことで、スライドガラスG上に薄切片Mが載置された薄切片標本を必要枚数作製することができる。
【0041】
ここで、上述した薄切片Mの搬送中において、制御部5が内部タイマをカウントし始めてから予め決められた所定時間経過しても、いまだ感知センサ4から感知信号が送られて来ない場合には、該制御部5は、搬送中に何らかの不具合が生じたと判断する。例えば、水路2の途中で薄切片Mが詰まったり、薄切片Mが破けたりする等の不具合が生じたと判断する。すると制御部5は、この場合にもバルブ25に作動信号を送って排出路18を閉塞させ、水Waを水路2から溢れ出させる。これにより、不具合が生じた薄切片Mを水Waと一緒に水路2外に排除することができ、次の薄切片Mの搬送に備えることができる。このように搬送途中で薄切片Mに何らかの不具合が生じたとしても、これらの不具合に即座に対応して該不具合を最小限の範囲に抑えることができ、薄切片Mの無駄な消費を抑えることができる。
【0042】
ここで、第2無端ベルト11を形成する材質は、親水性および撥水性の別を問わず、その材質は特に限定されるものではないが、親水性を有する材質で形成された場合には、薄切片Mが前記縦向き姿勢以外の姿勢で導入部8から整列部9に到達して、前述のように強制的に回転させられる過程で、薄切片Mの隅角部分を上方若しくは下方に折り曲げ易くすることが可能になる。したがって、前記縦向き姿勢以外の姿勢で整列部9に到達した薄切片Mを、この整列部9内で詰まらせることなく、確実に前記縦向き姿勢にすることができる。
【0043】
なお、前記実施形態では、制御部5において、前記撮像データに基づいて、導入部8内における回収ポイントP2側の端部に位置する薄切片Mが、前記縦向き姿勢以外の姿勢であると判断した場合に限って、第2無端ベルト11を駆動して前記他方の側面9bを前記流動方向L1の前側に向けて送り移動させる構成を示したが、これに代えて例えば、制御部5による判断結果に係らず常に、第2無端ベルト11を駆動しておき、薄切片Mの傾きの程度や方向等に応じて、前記他方の側面9bの送り移動速度並びに送り移動方向を調整するようにしてもよい。
【0044】
また、前記実施形態では、整列部9の水路幅が、前記流動方向L1の全長にわたって薄切片Mの短辺の長さWと同等とされた構成を示したが、これに代えて例えば、供給ポイントP1側から回収ポイントP2側に向かうに従い漸次狭くなり、回収ポイントP2側の端部で薄切片Mの短辺の長さWと同等の水路幅となる整列部9を採用してもよい。
例えば、図4に示されるように、整列部9の両側面9a、9bのうち、前記一方の側面9aを前記流動方向L1の前側に向かうに従い漸次前記他方の側面9bに近づくようにこの流動方向L1に対して傾斜させ、第2無端ベルト11が構成する前記他方の側面9bを前記流動方向L1に沿って平行に延在させるようにしてもよい。あるいはこれとは逆に、図5に示されるように、整列部9の両側面9a、9bのうち、前記一方の側面9aを前記流動方向L1に沿って平行に延在させ、第2無端ベルト11が構成する前記他方の側面9bを前記流動方向L1の前側に向かうに従い漸次前記一方の側面9aに近づくようにこの流動方向L1に対して傾斜させるようにしてもよい。
【0045】
これらの場合、薄切片Mが整列部9の側面9a、9bによって前述のように回転させられて前記縦向き姿勢となった後、排出部10側に向けて流れる過程で、前述の回転時に発生した慣性力等によりこの姿勢が崩れようとしても、その動作を、整列部9の両側面9a、9bによって阻止させることができる。さらに、薄切片Mを整列部9内で詰まらせることなく前述のように回転させて前記縦向き姿勢にすることができる。
さらにまた、第2無端ベルト11を整列部9に一対設け、これらの無端ベルト11の互いに対向する各表面によって、整列部9の両側面9a、9bを構成させるようにしてもよい。
【0046】
(第2実施形態)
次に、本発明に係る薄切片作製装置の第2実施形態を、図6を参照して説明する。なお、この第2実施形態においては、第1実施形態における構成要素と同一の部分については、同一の符号を付しその説明を省略し、異なる点についてのみ説明する。
本実施形態の薄切片作製装置30には、供給ポイントP1よりも上流側に配置されるとともに、当該薄切片作製装置30の上面視において、前記流動方向L1に対して傾斜する方向に延設された切断刃31と、この切断刃31よりも上流側に配置されるとともに、上面視長方形状の包埋ブロックBを、長辺を前記流動方向L1に沿って平行に延在させた状態で保持し、前記流動方向L1に沿って切断刃31に対して進退可能に設けられたカセット32と、が備えられている。
【0047】
さらに、本実施形態では、切断刃31で薄切された薄切片Mを供給ポイントP1に搬送する第1無端ベルト33が、当該薄切片作製装置30の上面視において、切断刃31の延在する方向に直交する方向に沿って延設されている。すなわち、この第1無端ベルト33は、前記上面視において前記流動方向L1に傾斜する方向に沿って延設されている。
また、本実施形態では、水路2における整列部9の両側面9a、9bがともに、前記流動方向L1に沿ってスライド移動可能に設けられている。図示の例では、整列部9内に、前記流動方向L1に沿って平行に延在した第2無端ベルト37が一対配置されており、これらの第2無端ベルト37が整列部9内にその幅方向に間隔をあけて各別に配置されることにより、両第2無端ベルト37において互いに対向する各表面によって整列部9の両側面9a、9bが構成されている。また、これらの両側面9a、9bは、前記流動方向L1の前方に向けてスライド移動可能となっている。
【0048】
さらに、本実施形態では、導入部8内における回収ポイントP2側の端部に、第1無端ベルト33の前記流動方向L1における下流側の端部が浸漬されるとともに、整列部9の両側面9a、9bのうち、第1無端ベルト33における前記流動方向L1の下流側の端部との前記流動方向L1に沿った距離が大きい側面9bに上流側から連なるガイド34が設けられている。図示の例では、ガイド34は、表裏面が前記流動方向L1に沿って平行に延在させられた板状体となっている。このガイド34の表面34a、および整列部9の側面9bそれぞれの、水路2の幅方向における位置は互いに同じとなっている。
【0049】
また、本実施形態では、排出部10における供給ポイントP1側の端部にも、整列部9の両側面9a、9bに各別に下流側から連なるガイド35、36が、排出部10の幅方向に間隔をあけて一対配設されている。これらのガイド板35、36は、表裏面が前記流動方向L1に沿って平行に延在させられた板状体となっている。そして、これらのガイド板35、36の互いに対向する各表面35a、36a、整列部9の両側面9a、9b、および排出部10の両側面10a、10bそれぞれの、水路2の幅方向における位置は互いに同じとなっている。
【0050】
以上のように構成された薄切片作製装置30では、包埋ブロックBを保持したカセット32が前記流動方向L1に沿って切断刃31に向けて前進移動したときに、切断刃31により包埋ブロックBが薄切されて薄切片Mが作製され、この薄切片Mが長辺を前記流動方向L1に沿って平行に延在させた前記縦向き姿勢の状態で第1無端ベルト33によって供給ポイントP1に供給され、その後、この薄切片Mは水路2内の液体の流れに乗って回収ポイントP2まで搬送されることになる。これにより、薄切片Mを前記縦向き姿勢に保持したまま水路2内で搬送し易くすることが可能になり、前述のように整列部9の両側面9a、9bが前記流動方向L1に沿ってスライド移動可能となっていることと相俟って、薄切片Mを前記縦向き姿勢にして回収ポイントP2まで確実に搬送することができる。
【0051】
さらに、包埋ブロックBがその長辺を前記流動方向L1に沿って平行に延在させた状態で保持されたカセット32を、前記流動方向L1に対して傾斜する方向に延設された切断刃31に向けて前記流動方向L1に沿って前進移動したときに薄切片Mが作製されるようになっているので、包埋ブロックBを切断する初期の段階で、切断刃31と包埋ブロックBとの接触長さを短くして、この包埋ブロックBに大きな変形が生ずるのを抑えることが可能になり、薄切片Mに皺を付けたり、丸まった状態にさせることなく高精度に作製することができる。
【0052】
また、導入部8内における回収ポイントP2側の端部にガイド34が設けられているので、第1無端ベルト33から水路2の供給ポイントP1に供給された薄切片Mが、導入部8内における回収ポイントP2側の端部に到達したときに、第1無端ベルト33による薄切片Mの移送方向の下流側に向けてさらに移動しようとしても、この移動をガイド34によって阻止して整列部9内に前記縦向き姿勢の状態でスムーズに進入させることが可能になる。
【0053】
なお、本発明の技術範囲は上記実施の形態に限定されるものではなく、本発明の趣旨を逸脱しない範囲において種々の変更を加えることが可能である。
例えば、上記各実施形態では、回収ポイントP2まで搬送されてきた薄切片Mを、把持ロボット7を利用してスライドガラスG上にすくい取る構成にしたが、把持ロボット7ではなく従来通り作業者が手作業で薄切片Mをすくい取っても構わない。この場合であっても、薄切片Mが全て縦向きに揃った状態で搬送されてくるので、従来のように薄切片Mの向きを1枚1枚確認する必要がない。従って、作業者にかかる負担を軽減でき、作業効率を向上することができる。但し、上述したように、把持ロボット7を備えることで、作業効率を大幅に軽減することができる。
【0054】
また、水路2内の水Waの流速は、整列部9の側面9a、9bのスライド移動速度に対して速くしても、あるいは遅くしても、さらには同等にしてもよい。ただし、前記流速を前記スライド移動速度と同等かそれよりも若干遅めにするのが好ましい。この場合、整列部9内に位置する薄切片Mが前記縦向き姿勢とされ、かつ整列部9の側面9a、9bがスライド移動しているときに、この薄切片Mが整列部9の側面9a、9bに当接しても、薄切片Mが水流によって回転させられて前記縦向き姿勢が崩れ易くなるのを防ぐことが可能になる。
【0055】
また、水Waを利用した場合を説明したが、水路2に貯留する液体は、包埋ブロックBの比重よりも大きく、薄切片Mをその表裏面が液面に沿うように浮遊させることが可能な液体であれば水に限られるものではない。例えば、水に何らかの物質を混合させた化学液でも構わない。また、水を使用する場合には、薄切片Mを構成するパラフィン(包埋剤N)が溶けない程度の温度まで温めた水を使用しても構わない。こうすることで、薄切片Mを搬送する際に、伸展させ易くなる。
【0056】
また、整列部9の前記流動方向L1に沿った長さは、薄切片Mの短辺の長さWよりも長く、かつ長辺の長さL以下とするのが好ましい。この場合、薄切片Mが整列部9内で前述のように回転させられて前記縦向き姿勢となった後、この薄切片Mが整列部9の側面9a、9bに当接してさらに回転させられ前記縦向き姿勢が崩れ易くなるのを防ぐことができる。
【0057】
さらに、第2無端ベルト11、37は、搬送する薄切片Mの短辺の長さWに応じて整列部9の幅方向に移動可能に設けられてもよい。この場合、搬送する薄切片Mの種々のサイズに対応することが可能になり、この薄切片作製装置1、30の取り扱い性を向上することができる。
【図面の簡単な説明】
【0058】
【図1】本発明に係る薄切片作製装置で作製され搬送される薄切片を示す図であって、(a)は斜視図であり、(b)は薄切片のサイズを示す図である。
【図2】本発明に係る薄切片作製装置の第1実施形態を示す上面図である。
【図3】図2に示す薄切片作製装置の断面矢視A−A図である。
【図4】本発明に係る薄切片作製装置の第1変形例を示す上面図である。
【図5】本発明に係る薄切片作製装置の第2変形例を示す上面図である。
【図6】本発明に係る薄切片作製装置の第2実施形態を示す上面図である。
【符号の説明】
【0059】
1、30 薄切片作製装置
2 水路
3 流動手段
5 制御部
6 第1無端ベルト(無端ベルト)
8 導入部
9 整列部
9a、9b 整列部の側面
10 排出部
11、37 第2無端ベルト
13 薄切片搬送装置
21 撮像手段
31 切断刃
32 カセット
34 ガイド
B 包埋ブロック
G スライドガラス(基板)
L 長辺の長さ
L1 流動方向
M 薄切片
P1 供給ポイント
P2 回収ポイント
S 生体試料
T 対角線の長さ
W 短辺の長さ
Wa 水(液体)
【技術分野】
【0001】
本発明は、生体試料が包埋された包埋ブロックを薄切して作製された薄切片を、スライドガラス等の基板上に固定させる際に使用する薄切片搬送装置および薄切片作製装置に関するものである。
【背景技術】
【0002】
従来より、理化学実験や顕微鏡観察に用いられる薄切片標本を作製する装置として、ミクロトームが一般的に知られている。この薄切片標本は、厚さが数μm(例えば、3μm〜5μm)の薄切片を、スライドガラス等の基板上に固定させたものである。ここで、ミクロトームを利用して薄切片標本を作製する一般的な方法について説明する。
まず、ホルマリン固定された生物や動物等の生体試料をパラフィン置換した後、更に周囲をパラフィンで固めて強固にして、ブロック状態の包埋ブロックを作製する。次に、この包埋ブロックを専用の薄切り装置であるミクロトームにセットして、粗削りを行う。この粗削りによって、包埋ブロックの表面が平滑面となると共に、実験や観察の対象物である包埋された生体試料の観察したい面が表面に露出した状態となる。
粗削りが終了した後、本削りを行う。これは、ミクロトームが有する切断刃により、包埋ブロックを上述した厚みでスライスする工程である。これにより、目的の面を持った薄切片を得ることができる。この際、包埋ブロックをミクロンオーダで制御し、薄くスライスすることで、薄切片の厚みを細胞レベルの厚みに近付けることができるので、より観察し易い薄切片標本を得ることができる。よって、可能な限り厚さが制御された薄い薄切片を作製することが求められている。なお、この本削りは、必要枚数の薄切片が得られるまで連続して行う。
次いで、本削りによって得られた薄切片を伸展させる伸展工程を行う。つまり、本削りによって作製された薄切片は、上述したように極薄の厚みでスライスされたものであるので、皺がついた状態や、丸まった状態(例えば、Uの字状)となってしまう。そこで、この伸展工程によって、皺や丸みを取って伸ばす必要がある。
一般的には、水とお湯を利用して伸展させている。始めに、本削りによって得られた薄切片を水に浮かべる。これにより、生体試料を包埋しているパラフィン同士のくっつきを防止しながら、薄切片の大きな皺や丸みを取ることができる。その後、薄切片をお湯に浮かべる。これにより、薄切片が伸び易くなるので、水による伸展では取りきれなかった残りの皺や、切削時に受けた圧力によって生じた歪を取ることができる。
そして、お湯による伸展が終了した薄切片をスライドガラス等の基板ですくって該基板上に載置する。なお、この時点で仮に伸展が不十分であった場合には、基板ごとホットプレート等に乗せてさらに熱を加える。これにより、薄切片をより伸展させることができる。
最後に、薄切片を乗せた基板を乾燥器内に入れて乾燥させる。この乾燥により、伸展で付着した水分が蒸発すると共に、薄切片が基板上に固定される。
その結果、薄切片標本を作製することができる。また、作製された薄切片標本は、主に生物、医学分野等で使用されている。
上述した工程は、そのほとんどの工程を、経験を積んだ熟練の作業者が行っているのが一般的であるが、一部の工程を自動で行う薄切片試料作製装置(例えば、特許文献1参照)も知られている。この薄切片試料作製装置は、セットされた包埋ブロックを切断して薄切片を作製する工程と、作製した薄切片をキャリアテープによって搬送してスライドガラス上に転写させる工程と、スライドガラスごと薄切片を伸展装置まで搬送して伸展を行う工程とを、自動的に行っている装置である。この薄切片試料作製装置を利用することで、作業者の負担を若干減らすことができる。
また、作製された薄切片を自動的に水槽に搬送する切片採取装置(例えば、特許文献2参照)も知られている。この切片採取装置を利用することで、作製した薄切片を水槽まで搬送するという一部の工程を装置で行えるので、同様に作業者の負担を若干減らすことができる。
【特許文献1】特開2004−28910号公報
【特許文献2】特開平5−273094号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
しかしながら、上述した従来の方法ではまだ以下の課題が残されていた。
初めに、高品質な薄切片標本を作製するためには、伸展が終了した薄切片をスライドガラス等の基板ですくって該基板上に載置する際に、基板の向きと薄切片の向きとを一致させる必要があった。通常、この作業は作業者が行っている。具体的には、一旦水中に基板を入れた後、水面に浮かんでいる薄切片の向きに基板の向きを合わせながら薄切片の一部を基板に接触させる。そして、ゆっくりと基板を水中から引き上げることで、基板の向きと薄切片の向きとを合わせながら、基板上に薄切片をすくい取ることができるものであった。
このように、作業者は1枚1枚薄切片の向きを合わせる必要があるので、集中力を要し、非常に手間のかかる作業であった。特に、取り扱う薄切片の数が膨大である上、水面の揺らぎ等の影響を受けて薄切片の姿勢が容易に変化するので、作業者にかかる負担が大きいものであった。
また、特許文献1および2等に記載されている装置を利用することで、作業者の負担を若干減らすことができるが、薄切片をすくい取る作業については自動化を行うことが困難であった。つまり、ロボット等を利用して自動化を行う場合には、水面に浮かんだ薄切片の位置や向き等を常に確認し、これらの情報に基づいて基板の位置や向きを制御しながら薄切片をすくい取る等の複雑な制御を行う必要がある。ところが、これを行うには高度なプログラミング制御や複雑な機械的機構等が必要とされ、現実的に実現させることが難しいものであった。そのため、薄切片の向きを確認しながら該薄切片を基板上に載置する作業に関しては、かわらず作業者が行う必要があった。
【0004】
本発明は、このような事情に考慮してなされたもので、包埋ブロックから作製された薄切片を、長辺が水路内の液体の流れに対して平行な縦向き姿勢にして、基板ですくい取る位置まで搬送することができ、作業者にかかる負担を極力減らすことができる薄切片搬送装置および薄切片作製装置を提供することを目的とする。
【課題を解決するための手段】
【0005】
上記課題を解決して、このような目的を達成するために、本発明の薄切片搬送装置は、生体試料が包埋された包埋ブロックを薄切して作製された平面視長方形状の薄切片を、該薄切片が供給される供給ポイントから、基板上にすくい取る回収ポイントまで搬送する薄切片搬送装置であって、前記供給ポイントと回収ポイントとを通過するように配設された水路と、この水路内の液体を前記供給ポイントから回収ポイントに向けて流動させることにより、前記薄切片を回収ポイントに向けて搬送する流動手段と、が備えられ、前記水路は、水路幅が供給ポイント側で前記薄切片の対角線の長さよりも大きく、回収ポイント側で前記薄切片の長辺の長さ以上かつ対角線の長さ以下となるように、供給ポイント側から回収ポイント側に向かうに従い漸次水路幅が狭くなる導入部と、水路幅が前記薄切片の短辺の長さ以上で、かつ長辺の長さ未満とされるとともに、少なくとも前記回収ポイント側の端部における水路幅が前記薄切片の短辺の長さと同等とされた整列部と、水路幅が前記薄切片の短辺の長さと同等とされた排出部と、が前記供給ポイント側から回収ポイント側に向けてこの順に連設された構成とされ、前記整列部を画成する両側面のうち少なくとも一方は、前記流動手段による前記水路内の液体の流動方向に沿ってスライド移動可能となっていることを特徴とする。
この発明では、水路内の液体が流動手段によって供給ポイントから回収ポイントに向かって流れているので、包埋ブロックを薄切して薄切片を作製した後、この薄切片を自動又は手動で供給ポイントまで搬送すると、薄切片は液体の流れに乗って自動的に回収ポイントまで搬送される。
さらに、薄切片がこのように搬送される過程において、まず、導入部内では、水路幅が供給ポイント側で薄切片の対角線の長さよりも大きく、回収ポイント側で薄切片の長辺の長さ以上かつ対角線の長さ以下となるように、供給ポイント側から回収ポイント側に向かうに従い漸次水路幅が狭くなっているので、薄切片は、例えば長辺が流れに対して平行な縦向き姿勢、あるいは長辺が流れに対して傾いた傾き姿勢、さらには長辺が流れに対して直交する横向き姿勢等といった種々の姿勢とさせられつつも、導入部内で詰まることなく整列部に搬送される。そして、整列部内では、導入部からの薄切片が前記縦向き姿勢以外の姿勢である場合には、この薄切片は、二つの隅角部分が整列部の両側面に当接した状態で、これらの両側面のうち少なくとも一方が前記流動方向に沿ってスライド移動することによって、強制的に回転させられ前記縦向き姿勢とさせられる。次に、排出部内では、前述のように水路幅が前記薄切片の短辺の大きさと同等とされているので、整列部からの前記縦向き姿勢の薄切片がこの姿勢を保持しつつ、回収ポイントまで搬送されることになる。なお、導入部から整列部に到達した薄切片が前記縦向き姿勢の場合には、この姿勢を保持しつつ前記整列部内および排出部内をこの順に流されて回収ポイントまで搬送される。
以上より、供給ポイントに供給された薄切片を前記縦向き姿勢にして回収ポイントまで搬送することができる。
これにより、回収ポイントまで搬送された薄切片を例えば手動でスライドガラス等の基板上にすくい取る場合には、従来のように1枚1枚薄切片の向きを確認しながら薄切片をすくい取る必要がないため、従来と比べ作業者にかかる負担を大幅に軽減でき、作業効率も向上することができる。さらに、回収ポイントに搬送された薄切片の姿勢を前記縦向き姿勢にすることが可能になることから、薄切片を基板上にすくい取る作業をロボット等に行わせることもでき、容易に自動化に対応することも可能になる。また、液体を利用して薄切片を搬送しているので、供給ポイントから回収ポイントまで搬送する間に、薄切片を伸展させることができる。よって、搬送と伸展とを同時に行うことができ、作業効率をより一層高めることができる。
【0006】
ここで、前記導入部における前記回収ポイント側の端部に位置する前記薄切片を撮像可能な撮像手段と、この撮像手段により得られた撮像データに基づいて、前記整列部を画成する両側面のうち少なくとも一方のスライド移動を制御する制御部と、が設けられてもよい。
この場合、撮像手段と制御部とが設けられているので、導入部における前記回収ポイント側の端部に位置する薄切片の姿勢に応じて、整列部の両側面のうち少なくとも一方のスライド移動を制御することが可能になる。
例えば、導入部における前記回収ポイント側の端部で、薄切片が前記縦向き姿勢以外の姿勢となっていた場合に限って整列部の側面をスライド移動させ、前記縦向き姿勢となっていた場合には、整列部の両側面を静止させた状態でこの整列部内を通過させるようにすることが可能になる。この場合、薄切片が導入部における前記回収ポイント側の端部では前記縦向き姿勢となっていたにもかかわらず、整列部内に進入したときに、整列部の側面を前述のようにスライド移動させたことによって整列部内での流動手段による液体の流れに乱れが生じ、薄切片の前記縦向き姿勢が崩れてしまうことを防止することができる。あるいは、導入部における前記回収ポイント側の端部で薄切片が前記縦向き姿勢以外の姿勢となっていた場合には、その傾きの程度や方向等に応じて、整列部の側面のスライド移動速度や移動方向を調整することによって、この薄切片が排出部に到達するまでに確実に前記縦向き姿勢にすることが可能になる。
【0007】
また、前記整列部の水路幅は、前記供給ポイント側から回収ポイント側に向かうに従い漸次狭くなってもよい。
この場合、薄切片が整列部内で前述のように回転させられて前記縦向き姿勢となった後、排出部に向けて流される過程で、前述の回転時に発生した慣性力等によりこの姿勢が崩れようとしても、その動作を、整列部の側面が薄切片の長辺をガイドすることによって阻止することができる。さらにまた、薄切片を整列部内で詰まらせることなく前述のように回転させて前記縦向き姿勢にすることができる。
【0008】
さらに、本発明の薄切片作製装置は、生体試料が包埋された包埋ブロックを薄切して平面視長方形状の薄切片を作製し、この薄切片を、基板上にすくい取る回収ポイントまで搬送する薄切片作製装置であって、前記供給ポイントと回収ポイントとを通過するように配設された水路、およびこの水路内の液体を前記供給ポイントから回収ポイントに向けて流動させることにより、前記薄切片を回収ポイントに向けて搬送する流動手段、を備える薄切片搬送装置と、前記供給ポイントよりも上流側に配置されるとともに、当該薄切片作製装置の上面視において、前記流動方向に対して傾斜する方向に延設された切断刃と、この切断刃よりも上流側に配置されるとともに、上面視長方形状の包埋ブロックを、長辺を前記流動方向に沿って平行に延在させた状態で保持し、前記流動方向に沿って前記切断刃に対して進退可能に設けられたカセットと、当該薄切片作製装置の上面視において、前記切断刃の延在する方向に直交する方向に延設されるとともに、前記流動方向の下流側の部分が前記導入部内に浸漬されて前記薄切片を供給ポイントに供給する無端ベルトと、が備えられ、前記水路は、水路幅が少なくとも供給ポイント側で前記薄切片の対角線の長さよりも大きい導入部と、水路幅が前記薄切片の短辺の長さ以上で、かつ長辺の長さ未満とされるとともに、少なくとも前記回収ポイント側の端部における水路幅が前記薄切片の短辺の長さと同等とされた整列部と、水路幅が前記薄切片の短辺の長さと同等とされた排出部と、が前記供給ポイント側から回収ポイント側に向けてこの順に連設された構成とされ、前記整列部を画成する両側面のうち少なくとも一方は、前記流動手段による前記水路内の液体の流動方向に沿ってスライド移動可能となっていることを特徴とする。
この発明では、包埋ブロックを保持したカセットが前記流動方向に沿って切断刃に向けて前進移動したときに、切断刃により包埋ブロックが薄切されて薄切片が作製され、この薄切片が長辺を前記流動方向に沿って平行に延在させた前記縦向き姿勢の状態で無端ベルトによって前記供給ポイントに供給され、その後、この薄切片は水路内の液体の流れに乗って回収ポイントまで搬送されることになる。これにより、薄切片を前記縦向き姿勢に保持したまま水路内で搬送し易くすることが可能になり、前述のように整列部の両側面のうち少なくとも一方が前記流動方向に沿ってスライド移動可能となっていることと相俟って、薄切片を前記縦向き姿勢にして回収ポイントまで確実に搬送することができる。
さらに、包埋ブロックがその長辺を前記流動方向に沿って平行に延在させた状態で保持されたカセットを、前記流動方向に対して傾斜する方向に延設された切断刃に向けて前記流動方向に沿って前進移動したときに薄切片が作製されるようになっているので、包埋ブロックを切断する初期の段階で、切断刃と包埋ブロックとの接触長さを短くして、この包埋ブロックに大きな変形が生ずるのを抑えることが可能になり、薄切片に皺を付けたり、丸まった状態にさせることなく高精度に作製することができる。
【0009】
さらにまた、前記導入部内における前記回収ポイント側の端部には、前記無端ベルトの前記流動方向における下流側の端部が浸漬されるとともに、前記整列部の両側面のうち、前記無端ベルトにおける前記流動方向の下流側の端部との前記流動方向に沿った距離が大きい側面に上流側から連なるガイドが設けられてもよい。
この場合、無端ベルトから供給ポイントに供給された薄切片が、導入部内における前記回収ポイント側の端部に到達したときに、無端ベルトによる薄切片の移送方向の下流側に向けてさらに移動しようとしても、この移動を前記ガイドによって阻止して整列部内に前記縦向き姿勢の状態でスムーズに進入させることが可能になる。
【発明の効果】
【0010】
この発明に係る薄切片搬送装置および薄切片作製装置によれば、包埋ブロックから作製された薄切片を、長辺が水路内の液体の流れに対して平行な縦向き姿勢にして、基板ですくい取る位置まで搬送することができ、作業者にかかる負担を極力減らすことができる。
【発明を実施するための最良の形態】
【0011】
(第1実施形態)
以下、本発明に係る薄切片作製装置の第1実施形態を、図1から図3を参照して説明する。この薄切片作製装置1は、生体試料Sが包埋された包埋ブロックBを薄切して作製された薄切片Mを、薄切片Mが供給された供給ポイントP1からスライドガラス(基板)Gにすくい取られて処理される回収ポイントP2まで搬送する装置である。
【0012】
初めに、包埋ブロックBは、図1(a)に示すように、ホルマリン固定された生体試料S内の水分をパラフィン置換した後、さらに周囲をパラフィン等の包埋剤Nによって直方体状に固めたものである。これにより、生体試料Sがパラフィン内に包埋された状態となっている。なお、生体試料Sとしては、例えば、人体や実験動物等から取り出した臓器等の組織であり、医療分野、製薬分野、食品分野、生物分野等で適時選択される。
また、薄切片Mは、この包埋ブロックBを図示しない切断刃によって例えば、3μm〜5μmに薄切することで平面視長方形状に作製されたものである。なお、本実施形態では、図1(b)に示すように、長辺の長さがL、短辺の長さがW、対角線の長さがTの薄切片Mを例に挙げて説明する。
【0013】
本実施形態の薄切片作製装置1は、図2および図3に示すように、供給ポイントP1と回収ポイントP2とを通過するように配設された水路2、およびこの水路2内の水(液体)Waを供給ポイントP1側から回収ポイントP2側に向けて流動させることにより、薄切片Mを回収ポイントP2に向けて搬送する流動手段3を備える薄切片搬送装置13と、供給ポイントP1よりも上流側に配置された図示されない切断刃と、この切断刃よりも上流側に配置されるとともに、包埋ブロックBを保持し、かつ前記切断刃に対して進退可能に設けられた図示されないカセットと、前記切断刃によって包埋ブロックBから薄切された薄切片Mを供給ポイントP1に供給する第1無端ベルト6と、回収ポイントP2に搬送されてきた薄切片Mを感知する感知センサ4と、回収ポイントP2に搬送された薄切片MをスライドガラスG上にすくい取る把持ロボット7と、これら各構成部品および後述する各構成部品を総合的に制御する制御部5とを備えている。
【0014】
以上より、包埋ブロックBから切断刃で薄切された薄切片Mが、第1無端ベルト6により供給ポイントP1に供給されて水路2内を通って回収ポイントP2に搬送され、その後把持ロボット7によりスライドガラスG上にすくわれるように構成されている。
【0015】
第1無端ベルト6は、その移送方向の上流側から下流側に向けて下方に向けて傾斜した状態で配置され、その下流側の部分が水路2内に浸漬している。なお、図示の例では、薄切片作製装置1の上面視において、第1無端ベルト6による薄切片Mの移送方向は、水路2内の水Waの流動方向L1と一致している。
把持ロボット7は、スライドガラスGの一端側を把持した状態で、該スライドガラスGを自在に操ることができる多関節ロボットである。この把持ロボット7は、薄切片Mが回収ポイントP2に搬送されてくるまで、スライドガラスGを、回収ポイントP2に配置された後述する第2貯水槽16内に入れた状態で待機するようになっている。そして、把持ロボット7は、回収ポイントP2に薄切片Mが搬送されてくると、この薄切片Mをすくうように作動するようになっている。
【0016】
水路2は、後述する回収槽12内に設けられており、水路幅が供給ポイントP1側で薄切片Mの対角線の長さTよりも大きく、回収ポイントP2側で薄切片Mの長辺の長さL以上かつ対角線の長さT以下となるように、供給ポイントP1側から回収ポイントP2側に向かうに従い漸次水路幅が狭くなる導入部8と、水路幅が薄切片Mの短辺の長さW以上で、かつ長辺の長さL未満とされるとともに、少なくとも回収ポイントP2側の端部における水路幅が薄切片Mの短辺の長さWと同等とされた整列部9と、水路幅が薄切片Mの短辺の長さWと同等とされた排出部10と、が供給ポイントP1側から回収ポイントP2側に向けてこの順に連設された構成となっている。なお、導入部8の深さは、水路2内に浸漬された第1無端ベルト6の移送方向における下流側の端部が底面に接触しないように、供給ポイントP1の部分で局所的に深くなっている。
【0017】
そして、本実施形態では、整列部9を画成する両側面9a、9bのうち少なくとも一方は、前記流動方向L1に沿ってスライド移動可能となっている。図示の例では、整列部9内において一方の側面9aと対向する位置に、前記流動方向L1に沿って送り移動可能に支持された第2無端ベルト11が配置されている。そして、この第2無端ベルト11において整列部9の一方の側面9aと対向し、かつ前記流動方向L1に沿ってスライド移動する表面によって、整列部9の他方の側面9bが構成されている。図示の例では、整列部9の両側面9a、9b同士の間隔、つまり整列部9の水路幅は、その全長にわたって薄切片Mの短辺Wの長さと同等になっている。また、この第2無端ベルト11は、整列部9の全長にわたって連続して延設されている。さらに、整列部9の両側面9a、9bはそれぞれ、前記流動方向L1に沿って平行となっている。
【0018】
なお、第2無端ベルト11は、軸線が鉛直方向に沿って延在するように配置された一対のローラ間に巻回されている。そして、この第2無端ベルト11は、水路2内において底面2aから上端に至る全高さ領域にわたって配設されている。
さらに以上のように構成された水路2は、図3に示すように、その底面2aが回収槽12の底面12aから上方に離れて位置するように設計されている。この回収槽12は、図3に示すように、上面視長方形状に形成されており、内側に水路2と、後述する第1貯水槽15および第2貯水槽16とを完全に収容できるサイズに形成されている。また、回収槽12の上端は、水路2の上端よりも上方に位置している。
【0019】
流動手段3は、図2および図3に示すように、供給ポイントP1よりも上流側で水路2に接続された第1貯水槽15と、回収ポイントP2で水路2に接続された第2貯水槽16と、第1貯水槽15に接続され、内部を水Waが流れる供給路17と、第2貯水槽16に接続され、内部を水Waが流れる排出路18と、供給路17と排出路18とにそれぞれ接続された貯水タンク19と、供給路17に設けられ、第2貯水槽16から第1貯水槽15に向かう方向に水Waを送り出す供給ポンプ20とを備えている。
【0020】
第1貯水槽15は、回収槽12の底面12aと側面12cとの一部分を利用して形成されており、底面12aに形成された給水口15aを介して前記供給路17に接続されている。
また、本実施形態の第1貯水槽15には、第1貯水槽15に溜まった水Waの水位を一定量に規制する蓋部15bが開口を塞ぐように設けられている。そして、第1貯水槽15に供給された水Waが、この蓋部15bの裏面に接触するようになっている。
【0021】
また、この蓋部15bは、第1貯水槽15側から水路2側に延出しており、水路2の底面2aの上方にも位置するようになっている。そしてこれら水路2の底面2aと2つの側面と蓋部15bの裏面とで囲まれるスリット空間P3によって、第1貯水槽15から水路2に流れ込む水Waの流量を絞り込んで一定量に規制することができると共に、水Waの流れを整えることができるようになっている。つまり、スリット空間P3は、第1貯水槽15に隣接して設けられ、供給ポイントP1から回収ポイントP2に向けて水Waの流れを整える整流手段の機能を果たしている。
【0022】
第2貯水槽16は、回収槽12の底面12aの一部分を利用して形成されており、仕切り板16aを挟んで2部屋構造になっている。一方の部屋には、把持ロボット7によってスライドガラスGが待機している。また、他方の部屋は、底面12aに形成された排水口16bを介して排出路18に接続されている。この第2貯水槽16は、通常時では一方の部屋が水路2を流れてきた水Waで満たされている。また、仕切り板16aを越えて他方の部屋に侵入した水Waが、排水口16bを介して排出路18から排出されている。
【0023】
また、排出路18には、排出路18を閉塞するバルブ25が設けられている。このバルブ25は、制御部5によって制御されるようになっている。また、バルブ25によって排出路18を閉塞した場合には、水路2内の水位が上昇し、水路2から溢れる。そして、回収槽12がこの溢れた水Waを回収するようになっている。この回収槽12の底面12aには、第2貯水槽16と同様に排水口12bが形成されており、排水口12bに回収管路26が接続されている。この回収管路26は、貯水タンク19に接続されている。つまり、回収槽12に溢れ出た水Waは、排水口12bおよび回収管路26を介して貯水タンク19に戻るようになっている。
【0024】
感知センサ4は、図3に示すように、回収ポイントP2上に配置されており、回収ポイントP2に搬送されてきた薄切片Mを感知している。この感知センサ4は、内部にレーザ光を照射する照射部(不図示)と、回収ポイントP2に搬送されてきた薄切片Mで反射したレーザ光を受光する受光部(不図示)とを有しており、反射強度の差から薄切片Mの感知を行う非接触型のセンサである。但し、反射強度の差に限られるものではない。また、非接触型ではなく、接触により感知する接触型でも構わない。
そして感知センサ4は、薄切片Mを感知すると、感知信号を制御部5に出力してその旨を知らせるようになっている。
【0025】
制御部5は、供給ポイントP1に第1無端ベルト6によって薄切片Mが搬送されてきてから所定時間以内に感知センサ4からの感知信号を受信し、受信してから一定時間経過後にバルブ25を作動させて、排出路18を閉塞させるように制御を行っている。
さらに制御部5は、供給ポイントP1に第1無端ベルト6によって薄切片Mが供給されてきてから、所定時間経過してもまだ感知センサ4から感知信号が送られてこない場合にも、やはり同様にバルブ25を作動させて排出路18を閉塞させるように制御を行っている。
【0026】
さらに、本実施形態では、導入部8内における回収ポイントP2側の端部に位置する薄切片Mを撮像可能な撮像手段21が設けられている。この撮像手段21は、得られた撮像データを制御部5に出力し、この制御部5において撮像データに基づいて第2無端ベルト11の駆動つまり整列部9の前記他方の側面9bのスライド移動を制御するようになっている。本実施形態では、制御部5において、前記撮像データに基づいて、導入部8内における回収ポイントP2側の端部に位置する薄切片Mが、長辺が流れに対して傾いた傾き姿勢、あるいは長辺が流れに対して直交する横向き姿勢といった長辺が流れに対して平行な縦向き姿勢以外の姿勢であると判断した場合に限って、第2無端ベルト11を駆動させるようになっている。
【0027】
次に、このように構成された薄切片作製装置1により、供給ポイントP1から回収ポイントP2まで薄切片Mの向きを調整しながら搬送する場合について説明する。なお、初期状態として、第1貯水槽15、水路2および第2貯水槽16には、決められた量の水Waが既に満たされた状態となっているものとする。
【0028】
まず初めに、制御部5は、第1無端ベルト6および供給ポンプ20に信号を出力して両者を作動させる。第1無端ベルト6は、この信号を受けて切断刃によって薄切された薄切片Mの搬送を開始する。この際、制御部5は、内部タイマのカウントを開始し、感知センサ4からの感知信号の受信を待つ待機状態に移行する。一方、供給ポンプ20は、貯水タンク19に貯留されている水Waを、供給路17を介して第1貯水槽15に供給する。供給された水Waは、蓋部15bの裏面に当たって流速や乱流が抑えられた後、スリット空間P3を通過して水路2側に流れ始める。
【0029】
これにより、既に満たされている水Waが供給ポイントP1から回収ポイントP2に向かって一定の速度で流れ始める。そして、第1無端ベルト6により供給ポイントP1に搬送されてきた薄切片Mは、水Waに浸かることで第1無端ベルト6から離間して導入路8の水面に浮かぶと共に、水Waの流れに沿って移動しはじめる。
【0030】
なお、水路2を流れた水Waは、第2貯水槽16に溜まった後、排水口16bを介して排出路18を流れ、貯水タンク19に流れる。その後、再び供給ポンプ20によって供給路17を通って第1貯水槽15に流される。このように、供給ポンプ20を作動させることで水Waを循環させることができるので、無駄のない効率的な使用を行うことができる。
【0031】
水面を水路2に沿って流れはじめた薄切片Mは、まず、導入部8を通過する。この導入部8では、水路幅が供給ポイントP1側で薄切片Mの対角線の長さTよりも大きく、回収ポイントP2側で薄切片Mの長辺の長さL以上かつ対角線の長さT以下となるように、供給ポイントP1側から回収ポイントP2側に向かうに従い漸次水路幅が狭くなっているので、薄切片Mの向きは特に定まらず、長辺が流れに対して平行な縦向き姿勢、あるいは長辺が流れに対して傾いた傾き姿勢、さらには長辺が流れに対して直交する横向き姿勢等といった種々の姿勢とさせられつつも、導入部8内で詰まることなく整列部9に搬送される。
【0032】
そして、この薄切片Mは、導入部8における回収ポイントP2側の端部に到達したときに、撮像手段21によって上方から撮像され、この撮像データが制御部5に出力される。この制御部5において、前記撮像データに基づいて薄切片Mの姿勢が判断され、この判断結果が前記縦向き姿勢以外であると判断した場合には、この制御部5から信号を出力して第2無端ベルト11を駆動させて、前記他方の側面9bを前記流動方向L1の前方に向けてスライド移動させる一方、判断結果が前記縦向き姿勢であると判断した場合には、制御部5から信号を出力せずに第2無端ベルト11を駆動させない。このように、導入部8における回収ポイントP2側の端部で薄切片Mが前記縦向き姿勢となっていた場合には、前記他方の側面9bを静止させた状態でこの整列部9内を通過させることにより、前記他方の側面9bを前述のようにスライド移動させたことによって整列部9内での流動手段3による水Waの流れに乱れが生じ、薄切片Mの前記縦向き姿勢が崩れてしまうことを防止することができる。
【0033】
ここで、前記判断結果が前記縦向き姿勢以外の姿勢であって、前記他方の側面9bを前記流動方向L1の前方に向けてスライド移動させた場合には、薄切片Mは、二つの隅角部分が整列部9の両側面9a、9bにより、上方若しくは下方に向けて折り曲げられるようにして挟まれる。この状態で、前記他方の側面9bが前述のようにスライド移動すると、薄切片Mの二つの隅角部分のうち一方の側面9aに当接した一方の隅角部分の搬送速度が、他方の側面9bに当接した他方の隅角部分の搬送速度よりも小さくなることにより、前記一方の隅角部分を中心に、薄切片Mが回転させられて前記縦向き姿勢になる。
【0034】
このようにして整列部9で前記縦向き姿勢となった薄切片Mは、水路幅が薄切片Mの短辺の長さWと同等とされた排出部10に到達し、この排出部10内を両側面10a、10bにガイドされつつ前記縦向き姿勢に保持されて、回収ポイントP2に到達する。
以上のように、薄切片Mが導入部8内をどのような姿勢で流されたとしても、水路2内の水Waの前記流動方向L1に沿った流れに乗って回収ポイントP2に到達するまでの間に、前記縦向き姿勢とすることができるようになっている。
【0035】
次いで、回収ポイントP2に薄切片Mが流れてくると、感知センサ4が薄切片Mを感知して感知信号を制御部5に出力する。制御部5は、感知信号を受信すると、内部タイマのカウントを停止すると共に、その間に要した時間が予め決められた所定時間内であるか否かを判断する。ここで、所定時間内であった場合には、制御部5は薄切片Mが水路2の途中で詰まる等の不具合もなく確実に搬送されてきたと判断し、把持ロボット7にすくい上げを開始する旨の信号を出力する。そして把持ロボット7は、制御部5からの信号を受けて、スライドガラスGを第2貯水槽16から引き上げる。ここで薄切片Mは、制御部5が把持ロボット7に信号を出力する間も流れているので、回収ポイントP2で待機しているスライドガラスGに接触した状態となっている。これにより、把持ロボット7がスライドガラスGを引き上げることで、薄切片Mを確実にすくい上げることができ、スライドガラスG上に薄切片Mを載置することができる。
【0036】
特に、薄切片Mを前記縦向き姿勢にして回収ポイントP2に到達させているので、把持ロボット7の作動を単純化することができる。つまり、薄切片Mの向きを確認しながら薄切片Mをすくい取る等といった複雑な作動を把持ロボット7に求める必要がない。単に、搬送されてきた薄切片Mをすくい取るだけの単純な作動を把持ロボット7に行わせるだけで、確実にスライドガラスGの向きと薄切片Mの向きとを同じ方向に一致させることができる。従って、薄切片Mをすくい取る作業を、容易に把持ロボット7に行わせることができ、自動化に対応することができる。その結果、1枚1枚薄切片Mの向きを確認しながら作業者が手作業ですくい取っていた従来の方法に比べて、作業者にかかる負担を大幅に軽減でき、作業効率を格段に向上することができる。
【0037】
また、水Waを利用して薄切片Mを搬送しているので、供給ポイントP1から回収ポイントP2まで搬送する間に、薄切片Mを伸展させることができる。よって、搬送と伸展とを同時に行うことができ、作業効率を高めることができる。
また、第1貯水槽15には蓋部15bが設けられているので、水Waの水位を一定量に規制することができる。また、水面が過度に泡立つことを防止できるので、水Waに気泡が混入したり、水流が乱れたりし難い。そのため、薄切片Mを安定した状態で回収ポイントP2まで搬送することができる。更に、第1貯水槽15に隣接してスリット空間P3が設けられているので、第1貯水槽15から水路2に流れる水Waの流れをさらに安定させることができ、層流に近い状態で水Waを流すことができる。そのため、さらに安定した状態で薄切片Mを搬送することができる。
【0038】
また、制御部5は、感知信号を受けてから一定時間が経過した後、薄切片Mの処理(上述したすくい取り処理)が回収ポイントP2で終了したと判断して、バルブ25に作動信号を送る。バルブ25は、この作動信号を受けて排出路18を閉塞する。すると、第2貯水槽16内の水Waが排出路18を通って排出されないので、徐々に水位が上昇する。そして、ついには水路2から水Waが溢れ出す(オーバーフロー)。これにより、先ほど搬送した薄切片Mに付着していた塵埃等を水路2外に排除することができる。
このように、薄切片Mを1枚処理する毎に、水Waを水路2外に溢れさせて塵埃等を排除するので、水路2内の水Waを常に清浄に維持することができる。よって、薄切片Mの詰まりや塵埃等が溜まってしまうことを未然に防止することができる。
【0039】
また、排除された塵埃等は、溢れ出た水Waと共に回収槽12に回収され、排水口12bを介して回収管路26を通った後、貯水タンク19に流れる。また、回収した水Waを、供給ポンプ20によって再度第1貯水槽15に供給することができる。そのため、水Waを無駄にすることなく、有効利用することができる。
【0040】
そして、制御部5は、一定時間上記オーバーフローを行わせた後、バルブ25に再度作動信号を送って、排出路18の閉塞を解除させる。これにより、水位が徐々に減少して再度元の水位となる。その後制御部5は、次の薄切片Mを搬送してくるように第1無端ベルト6に信号を送って作動させる。そして、上述した動作を繰り返して、次の薄切片Mを回収ポイントP2まで搬送すると共に、スライドガラスG上に載置させる。これを複数回繰り返すことで、スライドガラスG上に薄切片Mが載置された薄切片標本を必要枚数作製することができる。
【0041】
ここで、上述した薄切片Mの搬送中において、制御部5が内部タイマをカウントし始めてから予め決められた所定時間経過しても、いまだ感知センサ4から感知信号が送られて来ない場合には、該制御部5は、搬送中に何らかの不具合が生じたと判断する。例えば、水路2の途中で薄切片Mが詰まったり、薄切片Mが破けたりする等の不具合が生じたと判断する。すると制御部5は、この場合にもバルブ25に作動信号を送って排出路18を閉塞させ、水Waを水路2から溢れ出させる。これにより、不具合が生じた薄切片Mを水Waと一緒に水路2外に排除することができ、次の薄切片Mの搬送に備えることができる。このように搬送途中で薄切片Mに何らかの不具合が生じたとしても、これらの不具合に即座に対応して該不具合を最小限の範囲に抑えることができ、薄切片Mの無駄な消費を抑えることができる。
【0042】
ここで、第2無端ベルト11を形成する材質は、親水性および撥水性の別を問わず、その材質は特に限定されるものではないが、親水性を有する材質で形成された場合には、薄切片Mが前記縦向き姿勢以外の姿勢で導入部8から整列部9に到達して、前述のように強制的に回転させられる過程で、薄切片Mの隅角部分を上方若しくは下方に折り曲げ易くすることが可能になる。したがって、前記縦向き姿勢以外の姿勢で整列部9に到達した薄切片Mを、この整列部9内で詰まらせることなく、確実に前記縦向き姿勢にすることができる。
【0043】
なお、前記実施形態では、制御部5において、前記撮像データに基づいて、導入部8内における回収ポイントP2側の端部に位置する薄切片Mが、前記縦向き姿勢以外の姿勢であると判断した場合に限って、第2無端ベルト11を駆動して前記他方の側面9bを前記流動方向L1の前側に向けて送り移動させる構成を示したが、これに代えて例えば、制御部5による判断結果に係らず常に、第2無端ベルト11を駆動しておき、薄切片Mの傾きの程度や方向等に応じて、前記他方の側面9bの送り移動速度並びに送り移動方向を調整するようにしてもよい。
【0044】
また、前記実施形態では、整列部9の水路幅が、前記流動方向L1の全長にわたって薄切片Mの短辺の長さWと同等とされた構成を示したが、これに代えて例えば、供給ポイントP1側から回収ポイントP2側に向かうに従い漸次狭くなり、回収ポイントP2側の端部で薄切片Mの短辺の長さWと同等の水路幅となる整列部9を採用してもよい。
例えば、図4に示されるように、整列部9の両側面9a、9bのうち、前記一方の側面9aを前記流動方向L1の前側に向かうに従い漸次前記他方の側面9bに近づくようにこの流動方向L1に対して傾斜させ、第2無端ベルト11が構成する前記他方の側面9bを前記流動方向L1に沿って平行に延在させるようにしてもよい。あるいはこれとは逆に、図5に示されるように、整列部9の両側面9a、9bのうち、前記一方の側面9aを前記流動方向L1に沿って平行に延在させ、第2無端ベルト11が構成する前記他方の側面9bを前記流動方向L1の前側に向かうに従い漸次前記一方の側面9aに近づくようにこの流動方向L1に対して傾斜させるようにしてもよい。
【0045】
これらの場合、薄切片Mが整列部9の側面9a、9bによって前述のように回転させられて前記縦向き姿勢となった後、排出部10側に向けて流れる過程で、前述の回転時に発生した慣性力等によりこの姿勢が崩れようとしても、その動作を、整列部9の両側面9a、9bによって阻止させることができる。さらに、薄切片Mを整列部9内で詰まらせることなく前述のように回転させて前記縦向き姿勢にすることができる。
さらにまた、第2無端ベルト11を整列部9に一対設け、これらの無端ベルト11の互いに対向する各表面によって、整列部9の両側面9a、9bを構成させるようにしてもよい。
【0046】
(第2実施形態)
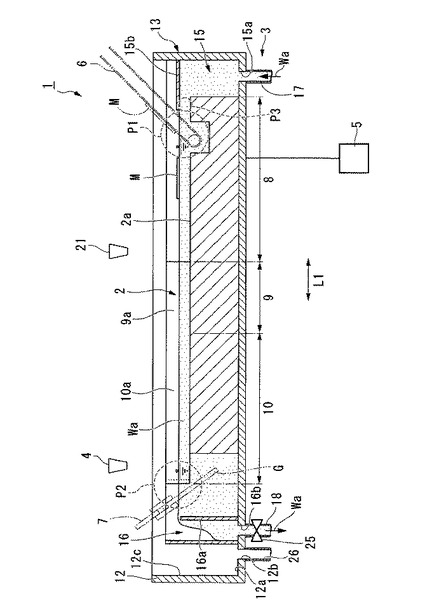
次に、本発明に係る薄切片作製装置の第2実施形態を、図6を参照して説明する。なお、この第2実施形態においては、第1実施形態における構成要素と同一の部分については、同一の符号を付しその説明を省略し、異なる点についてのみ説明する。
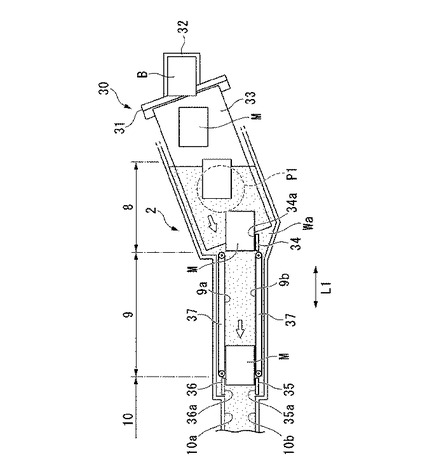
本実施形態の薄切片作製装置30には、供給ポイントP1よりも上流側に配置されるとともに、当該薄切片作製装置30の上面視において、前記流動方向L1に対して傾斜する方向に延設された切断刃31と、この切断刃31よりも上流側に配置されるとともに、上面視長方形状の包埋ブロックBを、長辺を前記流動方向L1に沿って平行に延在させた状態で保持し、前記流動方向L1に沿って切断刃31に対して進退可能に設けられたカセット32と、が備えられている。
【0047】
さらに、本実施形態では、切断刃31で薄切された薄切片Mを供給ポイントP1に搬送する第1無端ベルト33が、当該薄切片作製装置30の上面視において、切断刃31の延在する方向に直交する方向に沿って延設されている。すなわち、この第1無端ベルト33は、前記上面視において前記流動方向L1に傾斜する方向に沿って延設されている。
また、本実施形態では、水路2における整列部9の両側面9a、9bがともに、前記流動方向L1に沿ってスライド移動可能に設けられている。図示の例では、整列部9内に、前記流動方向L1に沿って平行に延在した第2無端ベルト37が一対配置されており、これらの第2無端ベルト37が整列部9内にその幅方向に間隔をあけて各別に配置されることにより、両第2無端ベルト37において互いに対向する各表面によって整列部9の両側面9a、9bが構成されている。また、これらの両側面9a、9bは、前記流動方向L1の前方に向けてスライド移動可能となっている。
【0048】
さらに、本実施形態では、導入部8内における回収ポイントP2側の端部に、第1無端ベルト33の前記流動方向L1における下流側の端部が浸漬されるとともに、整列部9の両側面9a、9bのうち、第1無端ベルト33における前記流動方向L1の下流側の端部との前記流動方向L1に沿った距離が大きい側面9bに上流側から連なるガイド34が設けられている。図示の例では、ガイド34は、表裏面が前記流動方向L1に沿って平行に延在させられた板状体となっている。このガイド34の表面34a、および整列部9の側面9bそれぞれの、水路2の幅方向における位置は互いに同じとなっている。
【0049】
また、本実施形態では、排出部10における供給ポイントP1側の端部にも、整列部9の両側面9a、9bに各別に下流側から連なるガイド35、36が、排出部10の幅方向に間隔をあけて一対配設されている。これらのガイド板35、36は、表裏面が前記流動方向L1に沿って平行に延在させられた板状体となっている。そして、これらのガイド板35、36の互いに対向する各表面35a、36a、整列部9の両側面9a、9b、および排出部10の両側面10a、10bそれぞれの、水路2の幅方向における位置は互いに同じとなっている。
【0050】
以上のように構成された薄切片作製装置30では、包埋ブロックBを保持したカセット32が前記流動方向L1に沿って切断刃31に向けて前進移動したときに、切断刃31により包埋ブロックBが薄切されて薄切片Mが作製され、この薄切片Mが長辺を前記流動方向L1に沿って平行に延在させた前記縦向き姿勢の状態で第1無端ベルト33によって供給ポイントP1に供給され、その後、この薄切片Mは水路2内の液体の流れに乗って回収ポイントP2まで搬送されることになる。これにより、薄切片Mを前記縦向き姿勢に保持したまま水路2内で搬送し易くすることが可能になり、前述のように整列部9の両側面9a、9bが前記流動方向L1に沿ってスライド移動可能となっていることと相俟って、薄切片Mを前記縦向き姿勢にして回収ポイントP2まで確実に搬送することができる。
【0051】
さらに、包埋ブロックBがその長辺を前記流動方向L1に沿って平行に延在させた状態で保持されたカセット32を、前記流動方向L1に対して傾斜する方向に延設された切断刃31に向けて前記流動方向L1に沿って前進移動したときに薄切片Mが作製されるようになっているので、包埋ブロックBを切断する初期の段階で、切断刃31と包埋ブロックBとの接触長さを短くして、この包埋ブロックBに大きな変形が生ずるのを抑えることが可能になり、薄切片Mに皺を付けたり、丸まった状態にさせることなく高精度に作製することができる。
【0052】
また、導入部8内における回収ポイントP2側の端部にガイド34が設けられているので、第1無端ベルト33から水路2の供給ポイントP1に供給された薄切片Mが、導入部8内における回収ポイントP2側の端部に到達したときに、第1無端ベルト33による薄切片Mの移送方向の下流側に向けてさらに移動しようとしても、この移動をガイド34によって阻止して整列部9内に前記縦向き姿勢の状態でスムーズに進入させることが可能になる。
【0053】
なお、本発明の技術範囲は上記実施の形態に限定されるものではなく、本発明の趣旨を逸脱しない範囲において種々の変更を加えることが可能である。
例えば、上記各実施形態では、回収ポイントP2まで搬送されてきた薄切片Mを、把持ロボット7を利用してスライドガラスG上にすくい取る構成にしたが、把持ロボット7ではなく従来通り作業者が手作業で薄切片Mをすくい取っても構わない。この場合であっても、薄切片Mが全て縦向きに揃った状態で搬送されてくるので、従来のように薄切片Mの向きを1枚1枚確認する必要がない。従って、作業者にかかる負担を軽減でき、作業効率を向上することができる。但し、上述したように、把持ロボット7を備えることで、作業効率を大幅に軽減することができる。
【0054】
また、水路2内の水Waの流速は、整列部9の側面9a、9bのスライド移動速度に対して速くしても、あるいは遅くしても、さらには同等にしてもよい。ただし、前記流速を前記スライド移動速度と同等かそれよりも若干遅めにするのが好ましい。この場合、整列部9内に位置する薄切片Mが前記縦向き姿勢とされ、かつ整列部9の側面9a、9bがスライド移動しているときに、この薄切片Mが整列部9の側面9a、9bに当接しても、薄切片Mが水流によって回転させられて前記縦向き姿勢が崩れ易くなるのを防ぐことが可能になる。
【0055】
また、水Waを利用した場合を説明したが、水路2に貯留する液体は、包埋ブロックBの比重よりも大きく、薄切片Mをその表裏面が液面に沿うように浮遊させることが可能な液体であれば水に限られるものではない。例えば、水に何らかの物質を混合させた化学液でも構わない。また、水を使用する場合には、薄切片Mを構成するパラフィン(包埋剤N)が溶けない程度の温度まで温めた水を使用しても構わない。こうすることで、薄切片Mを搬送する際に、伸展させ易くなる。
【0056】
また、整列部9の前記流動方向L1に沿った長さは、薄切片Mの短辺の長さWよりも長く、かつ長辺の長さL以下とするのが好ましい。この場合、薄切片Mが整列部9内で前述のように回転させられて前記縦向き姿勢となった後、この薄切片Mが整列部9の側面9a、9bに当接してさらに回転させられ前記縦向き姿勢が崩れ易くなるのを防ぐことができる。
【0057】
さらに、第2無端ベルト11、37は、搬送する薄切片Mの短辺の長さWに応じて整列部9の幅方向に移動可能に設けられてもよい。この場合、搬送する薄切片Mの種々のサイズに対応することが可能になり、この薄切片作製装置1、30の取り扱い性を向上することができる。
【図面の簡単な説明】
【0058】
【図1】本発明に係る薄切片作製装置で作製され搬送される薄切片を示す図であって、(a)は斜視図であり、(b)は薄切片のサイズを示す図である。
【図2】本発明に係る薄切片作製装置の第1実施形態を示す上面図である。
【図3】図2に示す薄切片作製装置の断面矢視A−A図である。
【図4】本発明に係る薄切片作製装置の第1変形例を示す上面図である。
【図5】本発明に係る薄切片作製装置の第2変形例を示す上面図である。
【図6】本発明に係る薄切片作製装置の第2実施形態を示す上面図である。
【符号の説明】
【0059】
1、30 薄切片作製装置
2 水路
3 流動手段
5 制御部
6 第1無端ベルト(無端ベルト)
8 導入部
9 整列部
9a、9b 整列部の側面
10 排出部
11、37 第2無端ベルト
13 薄切片搬送装置
21 撮像手段
31 切断刃
32 カセット
34 ガイド
B 包埋ブロック
G スライドガラス(基板)
L 長辺の長さ
L1 流動方向
M 薄切片
P1 供給ポイント
P2 回収ポイント
S 生体試料
T 対角線の長さ
W 短辺の長さ
Wa 水(液体)
【特許請求の範囲】
【請求項1】
生体試料が包埋された包埋ブロックを薄切して作製された平面視長方形状の薄切片を、該薄切片が供給される供給ポイントから、基板上にすくい取る回収ポイントまで搬送する薄切片搬送装置であって、
前記供給ポイントと回収ポイントとを通過するように配設された水路と、
この水路内の液体を前記供給ポイントから回収ポイントに向けて流動させることにより、前記薄切片を回収ポイントに向けて搬送する流動手段と、が備えられ、
前記水路は、水路幅が供給ポイント側で前記薄切片の対角線の長さよりも大きく、回収ポイント側で前記薄切片の長辺の長さ以上かつ対角線の長さ以下となるように、供給ポイント側から回収ポイント側に向かうに従い漸次水路幅が狭くなる導入部と、水路幅が前記薄切片の短辺の長さ以上で、かつ長辺の長さ未満とされるとともに、少なくとも前記回収ポイント側の端部における水路幅が前記薄切片の短辺の長さと同等とされた整列部と、水路幅が前記薄切片の短辺の長さと同等とされた排出部と、が前記供給ポイント側から回収ポイント側に向けてこの順に連設された構成とされ、
前記整列部を画成する両側面のうち少なくとも一方は、前記流動手段による前記水路内の液体の流動方向に沿ってスライド移動可能となっていることを特徴とする薄切片搬送装置。
【請求項2】
請求項1記載の薄切片搬送装置であって、
前記導入部における前記回収ポイント側の端部に位置する前記薄切片を撮像可能な撮像手段と、
この撮像手段により得られた撮像データに基づいて、前記整列部を画成する両側面のうち少なくとも一方のスライド移動を制御する制御部と、が設けられていることを特徴とする薄切片搬送装置。
【請求項3】
請求項1または2に記載の薄切片搬送装置であって、
前記整列部の水路幅は、前記供給ポイント側から回収ポイント側に向かうに従い漸次狭くなっていることを特徴とする薄切片搬送装置。
【請求項4】
生体試料が包埋された包埋ブロックを薄切して平面視長方形状の薄切片を作製し、この薄切片を、基板上にすくい取る回収ポイントまで搬送する薄切片作製装置であって、
前記供給ポイントと回収ポイントとを通過するように配設された水路、およびこの水路内の液体を前記供給ポイントから回収ポイントに向けて流動させることにより、前記薄切片を回収ポイントに向けて搬送する流動手段、を備える薄切片搬送装置と、
前記供給ポイントよりも上流側に配置されるとともに、当該薄切片作製装置の上面視において、前記流動方向に対して傾斜する方向に延設された切断刃と、
この切断刃よりも上流側に配置されるとともに、上面視長方形状の包埋ブロックを、長辺を前記流動方向に沿って平行に延在させた状態で保持し、前記流動方向に沿って前記切断刃に対して進退可能に設けられたカセットと、
当該薄切片作製装置の上面視において、前記切断刃の延在する方向に直交する方向に延設されるとともに、前記流動方向の下流側の部分が前記導入部内に浸漬されて前記薄切片を供給ポイントに供給する無端ベルトと、が備えられ、
前記水路は、水路幅が少なくとも供給ポイント側で前記薄切片の対角線の長さよりも大きい導入部と、水路幅が前記薄切片の短辺の長さ以上で、かつ長辺の長さ未満とされるとともに、少なくとも前記回収ポイント側の端部における水路幅が前記薄切片の短辺の長さと同等とされた整列部と、水路幅が前記薄切片の短辺の長さと同等とされた排出部と、が前記供給ポイント側から回収ポイント側に向けてこの順に連設された構成とされ、
前記整列部を画成する両側面のうち少なくとも一方は、前記流動手段による前記水路内の液体の流動方向に沿ってスライド移動可能となっていることを特徴とする薄切片作製装置。
【請求項5】
請求項4記載の薄切片作製装置であって、
前記導入部内における前記回収ポイント側の端部には、前記無端ベルトの前記流動方向における下流側の端部が浸漬されるとともに、前記整列部の両側面のうち、前記無端ベルトにおける前記流動方向の下流側の端部との前記流動方向に沿った距離が大きい側面に上流側から連なるガイドが設けられていることを特徴とする薄切片作製装置。
【請求項1】
生体試料が包埋された包埋ブロックを薄切して作製された平面視長方形状の薄切片を、該薄切片が供給される供給ポイントから、基板上にすくい取る回収ポイントまで搬送する薄切片搬送装置であって、
前記供給ポイントと回収ポイントとを通過するように配設された水路と、
この水路内の液体を前記供給ポイントから回収ポイントに向けて流動させることにより、前記薄切片を回収ポイントに向けて搬送する流動手段と、が備えられ、
前記水路は、水路幅が供給ポイント側で前記薄切片の対角線の長さよりも大きく、回収ポイント側で前記薄切片の長辺の長さ以上かつ対角線の長さ以下となるように、供給ポイント側から回収ポイント側に向かうに従い漸次水路幅が狭くなる導入部と、水路幅が前記薄切片の短辺の長さ以上で、かつ長辺の長さ未満とされるとともに、少なくとも前記回収ポイント側の端部における水路幅が前記薄切片の短辺の長さと同等とされた整列部と、水路幅が前記薄切片の短辺の長さと同等とされた排出部と、が前記供給ポイント側から回収ポイント側に向けてこの順に連設された構成とされ、
前記整列部を画成する両側面のうち少なくとも一方は、前記流動手段による前記水路内の液体の流動方向に沿ってスライド移動可能となっていることを特徴とする薄切片搬送装置。
【請求項2】
請求項1記載の薄切片搬送装置であって、
前記導入部における前記回収ポイント側の端部に位置する前記薄切片を撮像可能な撮像手段と、
この撮像手段により得られた撮像データに基づいて、前記整列部を画成する両側面のうち少なくとも一方のスライド移動を制御する制御部と、が設けられていることを特徴とする薄切片搬送装置。
【請求項3】
請求項1または2に記載の薄切片搬送装置であって、
前記整列部の水路幅は、前記供給ポイント側から回収ポイント側に向かうに従い漸次狭くなっていることを特徴とする薄切片搬送装置。
【請求項4】
生体試料が包埋された包埋ブロックを薄切して平面視長方形状の薄切片を作製し、この薄切片を、基板上にすくい取る回収ポイントまで搬送する薄切片作製装置であって、
前記供給ポイントと回収ポイントとを通過するように配設された水路、およびこの水路内の液体を前記供給ポイントから回収ポイントに向けて流動させることにより、前記薄切片を回収ポイントに向けて搬送する流動手段、を備える薄切片搬送装置と、
前記供給ポイントよりも上流側に配置されるとともに、当該薄切片作製装置の上面視において、前記流動方向に対して傾斜する方向に延設された切断刃と、
この切断刃よりも上流側に配置されるとともに、上面視長方形状の包埋ブロックを、長辺を前記流動方向に沿って平行に延在させた状態で保持し、前記流動方向に沿って前記切断刃に対して進退可能に設けられたカセットと、
当該薄切片作製装置の上面視において、前記切断刃の延在する方向に直交する方向に延設されるとともに、前記流動方向の下流側の部分が前記導入部内に浸漬されて前記薄切片を供給ポイントに供給する無端ベルトと、が備えられ、
前記水路は、水路幅が少なくとも供給ポイント側で前記薄切片の対角線の長さよりも大きい導入部と、水路幅が前記薄切片の短辺の長さ以上で、かつ長辺の長さ未満とされるとともに、少なくとも前記回収ポイント側の端部における水路幅が前記薄切片の短辺の長さと同等とされた整列部と、水路幅が前記薄切片の短辺の長さと同等とされた排出部と、が前記供給ポイント側から回収ポイント側に向けてこの順に連設された構成とされ、
前記整列部を画成する両側面のうち少なくとも一方は、前記流動手段による前記水路内の液体の流動方向に沿ってスライド移動可能となっていることを特徴とする薄切片作製装置。
【請求項5】
請求項4記載の薄切片作製装置であって、
前記導入部内における前記回収ポイント側の端部には、前記無端ベルトの前記流動方向における下流側の端部が浸漬されるとともに、前記整列部の両側面のうち、前記無端ベルトにおける前記流動方向の下流側の端部との前記流動方向に沿った距離が大きい側面に上流側から連なるガイドが設けられていることを特徴とする薄切片作製装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2009−109326(P2009−109326A)
【公開日】平成21年5月21日(2009.5.21)
【国際特許分類】
【出願番号】特願2007−281649(P2007−281649)
【出願日】平成19年10月30日(2007.10.30)
【出願人】(000002325)セイコーインスツル株式会社 (3,629)
【Fターム(参考)】
【公開日】平成21年5月21日(2009.5.21)
【国際特許分類】
【出願日】平成19年10月30日(2007.10.30)
【出願人】(000002325)セイコーインスツル株式会社 (3,629)
【Fターム(参考)】
[ Back to top ]