
薄型ヒューマンインターフェイス装置
基板を有するヒューマンインターフェイス装置を提供する。基板には歪み感応ダイが結合され、このダイは、ダイに加えられた力を示す電気信号を供給することができる。歪み感応ダイに隣接して力伝達要素が位置し、歪み感応ダイに結合される。力伝達要素には、平行移動要素が機械的に結合される。平行移動要素及び力伝達要素を弾性要素が少なくとも部分的に取り囲み、この平行移動要素と力伝達要素を機械的に結合する。平行移動要素に力が加わると弾性要素が伸び、弾性要素が伸びると力伝達要素に力が加えられ、この弾性要素によって力伝達要素に加えられた力が歪み感応ダイに加えられる。

【発明の詳細な説明】
【技術分野】
【0001】
〔関連出願との相互参照〕
本出願は、2009年10月6日に出願された米国仮特許出願第61/249,029号に対して利益を主張するものであり、この仮特許出願の内容は、その全体が引用により本明細書に組み入れられる。
【0002】
本発明は、ポインティングデバイスに関し、特に、電子装置のための薄型インターフェイス装置、又は微小電気機械システム(MEMS)シリコンダイを使用するユーザインターフェイス制御装置に関する。
【背景技術】
【0003】
ポータブル電子装置又はリモコン装置などのユーザインターフェイス制御装置のいずれかに組み込まれたグラフィックユーザインターフェイス(GUI)上に表示される情報コンテンツは成長し続けている。一般に、これらの装置は、情報コンテンツをナビゲートするためのジョイスティック又はマウスボタンを内蔵する。このジョイスティック又はマウスボタンは、マウスポインティングセンサを使用する。このセンサは、ユーザによりジョイスティック又はマウスボタンに加えられた力に関して移動方向及び強度を検出する。このマウスポインティングセンサにより生成された信号が、オンボード論理回路により調整及び処理されて、GUIにより表示されるポインタを作動させる。しかしながら、アドレスリスト、写真及び音楽などの情報コンテンツをナビゲートするのにボタンをクリックしてリストを検索する必要があるということは、時として非効率的かつ面倒である。
【0004】
Vaganovに付与された米国特許第7,554,167号には、ボスを含むシリコン歪みゲージダイを利用する、ポータブル電子装置に適用可能な1つの種類のセンサが記載されている。通常、シリコン歪みゲージダイは、ボスの先端に加えられる横向きの力に反応する。ボスは、この力をダイの薄くなった領域に伝達し、ここで歪み感応要素が、加えられた横向きの力に対応する電気信号を生成する。様々な実施形態は、ボスの先端に固着されたポスト、ワイヤ、又はバネなどの延長部を組み込んで、ユーザインターフェイスを形成するとともに装置の高さを延ばす。Vaganov他に付与された米国特許第7,476,952号には、歪み感応ダイに基づくとともに、様々な形状のインターフェイスを利用してユーザがダイに力信号を印加できるようにする実施形態が記載されている。米国特許第7,554,167号及び米国特許第7,476,952号は、いずれも引用により本開示に組み入れられる。これらの2つの引用特許を含む従来技術では、シリコン歪みゲージダイが過負荷を受けると容易に壊れる点に対処していない。本発明の目的は、過負荷から保護された、従って信頼性の高いヒューマンインターフェイス装置を作成することである。本発明のさらなる目的は、このヒューマンインターフェイス装置を薄型にすることにより、様々な電子装置に適合するようにすることである。本発明のさらに別の目的は、このヒューマンインターフェイス装置の構成要素の数及び複雑性を最小化し、従って低コストで製造できるようにすることである。当業者には、本発明のその他の利点も明らかになるであろう。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】米国特許第7,554,167号明細書
【特許文献2】米国特許第7,476,952号明細書
【発明の概要】
【課題を解決するための手段】
【0006】
本開示をより完全に理解するために、以下の詳細な説明及び添付図面を参照されたい。
【図面の簡単な説明】
【0007】
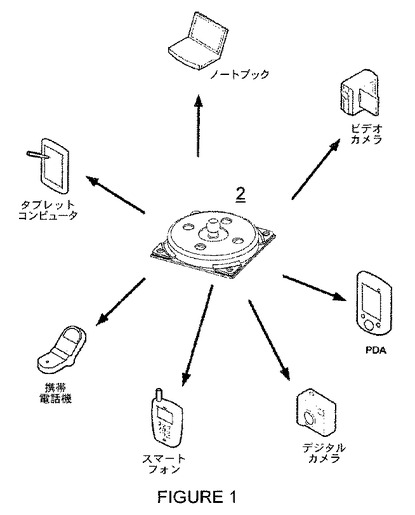
【図1】本発明の様々な実施形態による、様々な種類の装置で利用できるヒューマンインターフェイス装置の斜視図である。
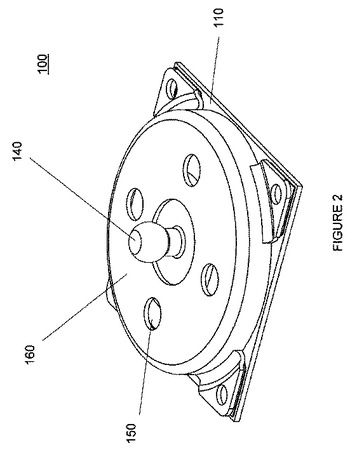
【図2】本発明の実施形態によるヒューマンインターフェイス装置の斜視図である。
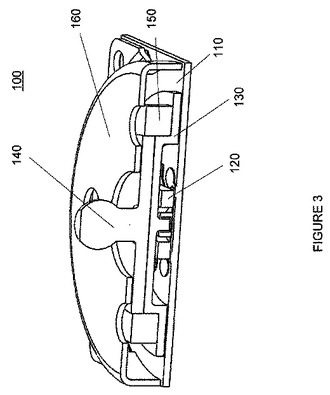
【図3】図2のヒューマンインターフェイス装置の断面図である。
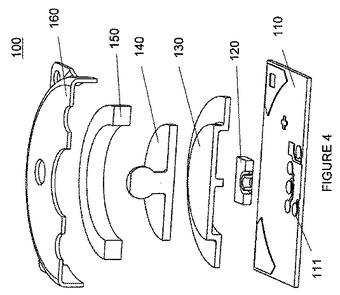
【図4】図2のヒューマンインターフェイス装置の分解断面図である。
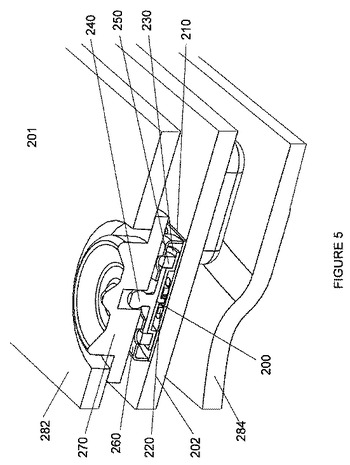
【図5】本発明の実施形態による、応用装置内のヒューマンインターフェイス装置の断面図である。
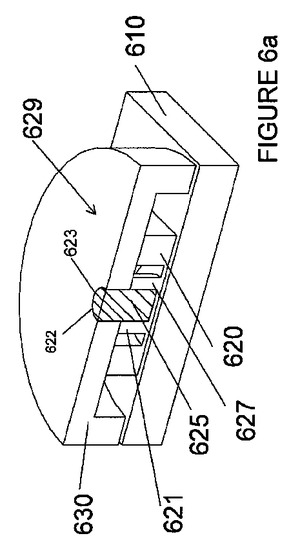
【図6A】本発明の実施形態におけるヒューマンインターフェイス装置の部品である基板、ダイ、及び力伝達要素の斜視断面図である。
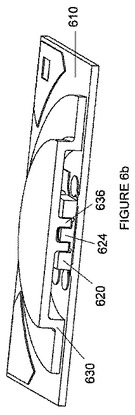
【図6B】本発明の実施形態におけるヒューマンインターフェイス装置の斜視断面図である。
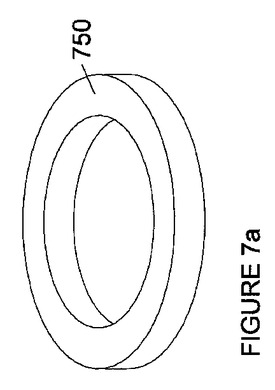
【図7A】本発明の様々な実施形態のヒューマンインターフェイス装置内で利用できる弾性要素の斜視図である。
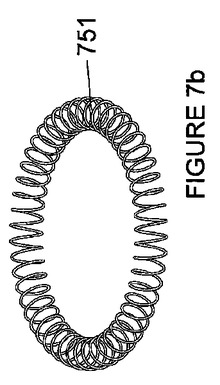
【図7B】本発明の様々な実施形態のヒューマンインターフェイス装置内で利用できる弾性要素の斜視図である。
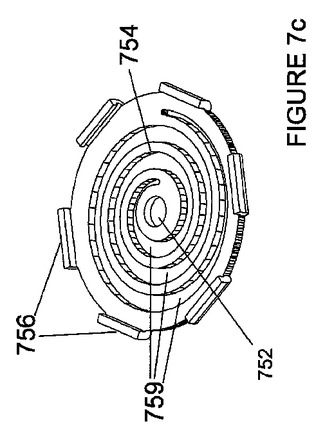
【図7C】本発明の様々な実施形態のヒューマンインターフェイス装置内で利用できる弾性要素の斜視図である。
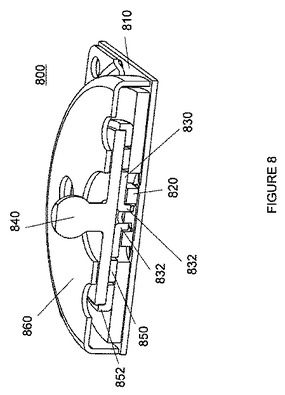
【図8】本発明の実施形態における、突出部を有する弾性要素を利用するヒューマンインターフェイス装置の斜視断面図である。
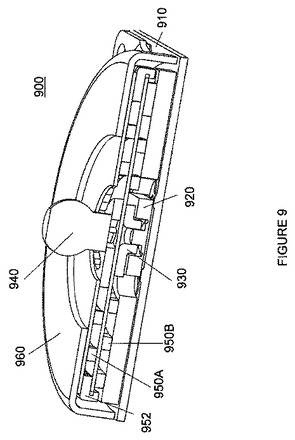
【図9】本発明の実施形態における、弾性要素を2つのバネ要素で構成したヒューマンインターフェイス装置の斜視断面図である。
【発明を実施するための形態】
【0008】
本開示の発明は、様々な修正及び代替形態が可能であるが、図面にはいくつかの実施形態を一例として示し、本明細書ではこれらの実施形態について説明する。しかしながら、本開示は、説明する特定の形態に本発明を限定することを意図するものではなく、むしろ添付の特許請求の範囲によって定められる本発明の思想及び範囲内に含まれる全ての修正物、代替物、及び同等物を網羅することを意図するものであると理解されたい。
【0009】
図1に、本明細書で説明する1又はそれ以上の実施形態によるヒューマンインターフェイス装置2の柔軟性及び有用性を示す。ヒューマンインターフェイス装置2は、小型の及び/又は薄型の電子装置に含めるのに適した小型の寸法を有し、その単純さにより収率が高く、過負荷に強く、製造が容易である。この点に関し、ヒューマンインターフェイス装置2は、ウェブ対応電話機、スマートフォン、携帯情報端末(PDA)装置、ゲーム機、ラップトップ、タブレットコンピュータ、ノートブック、パーソナルコンピュータ、カメラ、テレビ、オーブン、電子レンジ、全地球測位システム(GPS)、blu−rayプレーヤ、HD−DVDプレーヤ、DVDプレーヤ、その他の種類のポータブルコンピュータ及びインターネットアクセス機器及び装置、デジタル撮像装置、家庭用電化製品、車載装置、ナビゲーションシステムなどを含む様々な種類の電子装置に含めることができるX−Y軸のポインティング機能を提供する。ナビゲーションタスク又は情報コンテンツでは、ヒューマンインターフェイス装置2を、コンピュータマウス、ジョイスティック、スタイラス、リモコン装置、キーボード、キーパッド、ポータブルコンピュータ及びインターネットアクセス機器及び装置用のその他の種類の入力装置、家庭用電化製品、車載装置などの他のユーザインターフェイス制御装置に一体化することもできる。ヒューマンインターフェイス装置2は、約1.5mm以下の厚み及び約10mm以下の長さを有することができるが、他の寸法も想定される。
【0010】
ある実施形態では、ヒューマンインターフェイス装置を提供する。この装置は基板を有する。この装置は、基板に結合された歪み感応ダイも有し、このダイは、歪み感応ダイに加えられた力を示す電気信号を供給することができる。歪み感応ダイに隣接して力伝達要素が位置し、歪み感応ダイに結合される。力伝達要素には、平行移動要素が機械的に結合される。平行移動要素及び力伝達要素を弾性要素が少なくとも部分的に取り囲み、この平行移動要素と力伝達要素を機械的に結合する。平行移動要素に力が加わると、弾性要素が伸びる。弾性要素が伸びると、力伝達要素に力が加えられる。次に、この弾性要素によって力伝達要素に加えられた力が、歪み感応ダイに加えられる。
【0011】
ある実施形態では、力平行移動要素が、この平行移動要素に加えられた垂直の力が歪み感応ダイへ伝達されるのを防ぐような形状を有する。
【0012】
ある実施形態では、力伝達要素を少なくとも部分的に覆うハウジングが設けられる。
【0013】
ある実施形態では、ハウジングが、平行移動要素の動きに物理的制限を与える。
【0014】
ある実施形態では、弾性要素がバネである。
【0015】
ある実施形態では、ヒューマンインターフェイス装置が表面実装可能である。
【0016】
別の実施形態では、基板を有するヒューマンインターフェイス装置を提供する。基板には、加えられた力を示す電気信号を供給できる歪み感応ダイが結合される。歪み感応ダイに隣接して力伝達要素が位置し、歪み感応ダイに結合される。力伝達要素には、平行移動要素が機械的に結合される。平行移動要素及び力伝達要素には弾性要素が隣接して、この平行移動要素と力伝達要素を機械的に結合する。平行移動要素に力が加わると、弾性要素が伸びる。弾性要素が伸びると、力伝達要素に力が加えられる。次に、この弾性要素によって力伝達要素に加えられた力が、歪み感応ダイに加えられる。
【0017】
ある実施形態では、力平行移動要素が、この平行移動要素に加えられた垂直の力が歪み感応ダイへ伝達されるのを防ぐような形状を有する。
【0018】
ある実施形態では、力伝達要素を少なくとも部分的に覆うハウジングが設けられる。
【0019】
ある実施形態では、ハウジングが、平行移動要素の動きに物理的制限を与える。
【0020】
ある実施形態では、弾性要素がバネである。
【0021】
ある実施形態では、ヒューマンインターフェイス装置が表面実装可能である。
【0022】
図2〜図9に、ヒューマンインターフェイス装置の実施形態を順次詳細になっていくように示す。従って、図の各々における数字は同じ要素に対応する。
【0023】
本発明には、1)基板110、2)歪み感応ダイ120、3)力伝達要素130、4)平行移動要素140、5)バネ又は弾性要素150、及び6)ハウジング160という6つの機能要素が存在する。これらの機能要素が協働して、丈夫な薄型のヒューマンインターフェイス装置を作成するという目的を達成する。しかしながら、以下では6つの物理的に分離した要素として説明するが、単一の物理的要素内でいくつかの機能を組み合わせることも想定される。例えば、弾性機能と力伝達機能を単一の物理的要素内で実現することができる。例えば、以下でさらに詳述する図8の実施形態を参照されたい。
【0024】
基板110は、歪み感応ダイ120を装着するプラットフォームを提供し、ダイから反対面への電気的インターフェイスを定める役割を果たす。ヒューマンインターフェイス装置100は、応用装置のPCB(図示せず)に表面実装されることが想定される。ヒューマンインターフェイス装置100の基板110は、例えば、表面実装過程において装置のPCBに物理的及び電気的に取り付けられる面を定める。ある実施形態では、基板110が、セラミックのプリント回路基板材料又は同様のものであると想定される。基板110は、両面上に金属配線111(反対面は図示せず)を有する。基板110の一方の面に歪み感応ダイ120が装着され、反対側の面は装置のPCBに接続される。従って、平行移動要素140の動きを示す信号を、ヒューマンインターフェイス装置100から応用装置のPCBを介して応用装置へ通信することができる。
【0025】
歪み感応ダイ120は、ボス、弾性領域、外枠、及び歪み感応要素を含んで歪みを電気信号に変換するという点で、上記で引用した特許のものに類似する。ダイ120は、フリップチップ接続を介して基板110に装着されると想定される。しかしながら、当業者に周知のその他の結合方法も想定される。これにより、ダイ120と基板110の間の面に電気的インターフェイスが定められ、ダイ120の反対面には、ダイ120との機械的インターフェイスが実現される。この結果、電気的インターフェイスと機械的インターフェイスが分離した状態で保持されて、これらの間の干渉が避けられ、従って信頼性問題が起きる可能性が最低限に抑えられる。
【0026】
力伝達要素130は、ダイに横向きの力を印加するインターフェイスを提供し、ダイ120に垂直の力が到達するのを防ぐことができる。このことは、ダイ120を保護するのに役立ち、図示のように力伝達要素130が基板110上に載るように規制すること、又は平行移動要素が力伝達要素に垂直負荷を加える能力を限定するようにしてこれを制約することのいずれかによって実現することができる。
【0027】
力伝達要素130には、弾性要素150を介して平行移動要素140が接続される。ユーザが、平行移動要素140を直接的に又は間接的に動かすと、弾性要素150が、力伝達要素130上に対応する力を生成する。平行移動要素140は、横方向にしか動かないように規制される。平行移動要素140及び/又は力伝達要素130は、垂直軸を中心にダイ120に対して自由に回転することができ、従ってこの動きはダイ120から分断されている。
【0028】
基板110には、ヒューマンインターフェイス装置100全体を収容するハウジング160が取り付けられる。ハウジング160は、平行移動要素140に印加できる平行移動量を制限する役目を果たし、従って最終的には、ダイ110に加えられる最大力を制限する。ユーザが平行移動要素140に力を加えると、この平行移動要素140が動いて弾性要素150を伸ばす。弾性要素150は、その伸びた状態で力伝達要素130に力を加え、これがさらに歪み感応ダイ120に力を加える。ダイ120は、最初にユーザが加えた力に対応する電気的出力を生み出す。
【0029】
力伝達要素は、様々な方法で歪み感応ダイに係合又は別様に結合することができる。図6A及び図6Bにいくつかの例を示す。図6Aでは、力伝達要素630内の穴623及び歪み感応ダイ620のボス627内の穴625にピン622が係合している。ピン622は、ダイ620の囲壁又はシリンダ621に隣接してもよい。このピン622が、力伝達要素630に加えられた力を歪み感応ダイ620のボスに効果的に連結させる。ピン622は、力伝達要素630の頂面629に延びる高さを有する。別の実施形態では、力伝達要素が、ピン622と同様の形状ではあるが一体形成された部材(図示せず)を有し、これが歪み感応ダイ620の穴625内へ延びている。この部材は、ピン622と同じ役割を果たす。ピン622は、円筒形状であるように示しているが、当業者が想定するあらゆる形状を有することができ、当業者が想定するあらゆる材料で構成することができる。ピン622は、剛性を有することもできるが、他の実施形態では、例えば応用装置のPCBに信号を伝達する上で所望の感度及び/又は遅延を与えることができる軟質材料で構成することもできる。
【0030】
図6Bでは、力伝達要素630上にシリンダ636が形成され、又は力伝達要素630に取り付けられて、歪み感応ダイ620のボス624を取り囲む。シリンダ636は、ボス624に隣接し、及びいくつかの実施形態では接触し、従って力伝達要素630に加えられた力を歪み感応ダイ620に効果的に伝える。これらの例の各々では、加えられる剪断力に耐えられる強固な係合を実現することが目的である。またこれらの例では、主軸を中心とする回転が可能になることで、ユーザにより力伝達要素630に加えられるあらゆる回転力からダイが保護される。
【0031】
弾性要素は、円形、楕円形、矩形、又はその他の形状などの様々な形態又は形状をとることができる。図7Aに、弾性バンド750を示す。このバンド750は、例えばシリコーンなどの材料で作成される。他の弾性材料も想定される。図7Bには、弾性要素として弦巻バネ751を開示されている。このバネ751は、ステンレス製ワイヤで作成することができるが、プラスチックなどの他の弾性材料で作成することもできる。図7Cには、らせん状のバネの形をした別の弾性要素754を示している。このバネは、金属箔から化学エッチングすることができるが、プラスチックから成型することもできる。例えば、バネ754は、その中心孔752を介して(例えばピンなどを介して)力伝達要素に係合する一方で、平行移動要素の周辺部に接触できる突出部756を介して平行移動要素の周辺部に係合することもできる。別の実施形態では、らせんバネ754は突出部を有していない。使用する弾性要素の種類は、ヒューマンインターフェイス装置の所望の感度に基づいてよい。
【0032】
図8に、らせんバネ弾性要素850の例を示しており、この例では、力伝達要素830がらせんバネ弾性要素850の中心に一体化されている。より詳細には、力伝達要素830の延長部材832が、らせんバネ850内の空間に位置合わせされてこれに挿入される。図8にはこの空間を示していないが、これらは、らせんバネ754内の空間759と類似している。平行移動要素840は、湾曲した突出部852と、らせん状弾性要素850の周辺部で係合する。らせんバネ要素850の上下を逆にすることによって、これを平行移動要素840と一体化させることもでき、この結果、らせんバネ要素850が力平行移動要素830に係合して、湾曲した突出部852が力伝達要素830の周囲を取り囲むようになることが考えられる。
【0033】
図9に示す別の実施形態では、2つのらせんバネ950A、950Bを使用する。らせんバネ950Aは、湾曲した突出部952を有する。バネ950Bも突出部を有することにより、バネ950Aとバネ950Bの両方の突出部が互いに係合して噛み合う(明確には、一方のバネの突出部が他方のバネの突出部間に位置する)ようになることが考えられる。力伝達要素930が、第2のバネ950Bの中心と一体化される一方で、平行移動要素940が、バネ950Aの中心に一体化されるようになる。ある実施形態では、バネ950A及び950Bが同じ直径を有することができる。
【0034】
ここで図5を参照すると、ヒューマンインターフェイス装置200が、応用装置201内に装着されている。ヒューマンインターフェイス装置200の基板210は、応用装置のPCB202に表面実装される。上部ケース282及び下部ケース284が、応用装置201を収容する。上部ケース282の表面を通じてボタン270が突出し、ユーザによるアクセスを可能にする。ボタン270は、平行移動要素240に係合して、ボタン270が横方向に動かされると、平行移動要素240が対応して動くようになる。ボタン270は、装置200のハウジング260上に位置してもよい。
【0035】
本明細書では、本発明者らが認識する本発明を実施するための最良の形態を含む本発明の好ましい実施形態を説明した。図示の実施形態は例示にすぎず、本発明の範囲を限定すると解釈すべきではないことを理解されたい。
【技術分野】
【0001】
〔関連出願との相互参照〕
本出願は、2009年10月6日に出願された米国仮特許出願第61/249,029号に対して利益を主張するものであり、この仮特許出願の内容は、その全体が引用により本明細書に組み入れられる。
【0002】
本発明は、ポインティングデバイスに関し、特に、電子装置のための薄型インターフェイス装置、又は微小電気機械システム(MEMS)シリコンダイを使用するユーザインターフェイス制御装置に関する。
【背景技術】
【0003】
ポータブル電子装置又はリモコン装置などのユーザインターフェイス制御装置のいずれかに組み込まれたグラフィックユーザインターフェイス(GUI)上に表示される情報コンテンツは成長し続けている。一般に、これらの装置は、情報コンテンツをナビゲートするためのジョイスティック又はマウスボタンを内蔵する。このジョイスティック又はマウスボタンは、マウスポインティングセンサを使用する。このセンサは、ユーザによりジョイスティック又はマウスボタンに加えられた力に関して移動方向及び強度を検出する。このマウスポインティングセンサにより生成された信号が、オンボード論理回路により調整及び処理されて、GUIにより表示されるポインタを作動させる。しかしながら、アドレスリスト、写真及び音楽などの情報コンテンツをナビゲートするのにボタンをクリックしてリストを検索する必要があるということは、時として非効率的かつ面倒である。
【0004】
Vaganovに付与された米国特許第7,554,167号には、ボスを含むシリコン歪みゲージダイを利用する、ポータブル電子装置に適用可能な1つの種類のセンサが記載されている。通常、シリコン歪みゲージダイは、ボスの先端に加えられる横向きの力に反応する。ボスは、この力をダイの薄くなった領域に伝達し、ここで歪み感応要素が、加えられた横向きの力に対応する電気信号を生成する。様々な実施形態は、ボスの先端に固着されたポスト、ワイヤ、又はバネなどの延長部を組み込んで、ユーザインターフェイスを形成するとともに装置の高さを延ばす。Vaganov他に付与された米国特許第7,476,952号には、歪み感応ダイに基づくとともに、様々な形状のインターフェイスを利用してユーザがダイに力信号を印加できるようにする実施形態が記載されている。米国特許第7,554,167号及び米国特許第7,476,952号は、いずれも引用により本開示に組み入れられる。これらの2つの引用特許を含む従来技術では、シリコン歪みゲージダイが過負荷を受けると容易に壊れる点に対処していない。本発明の目的は、過負荷から保護された、従って信頼性の高いヒューマンインターフェイス装置を作成することである。本発明のさらなる目的は、このヒューマンインターフェイス装置を薄型にすることにより、様々な電子装置に適合するようにすることである。本発明のさらに別の目的は、このヒューマンインターフェイス装置の構成要素の数及び複雑性を最小化し、従って低コストで製造できるようにすることである。当業者には、本発明のその他の利点も明らかになるであろう。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】米国特許第7,554,167号明細書
【特許文献2】米国特許第7,476,952号明細書
【発明の概要】
【課題を解決するための手段】
【0006】
本開示をより完全に理解するために、以下の詳細な説明及び添付図面を参照されたい。
【図面の簡単な説明】
【0007】
【図1】本発明の様々な実施形態による、様々な種類の装置で利用できるヒューマンインターフェイス装置の斜視図である。
【図2】本発明の実施形態によるヒューマンインターフェイス装置の斜視図である。
【図3】図2のヒューマンインターフェイス装置の断面図である。
【図4】図2のヒューマンインターフェイス装置の分解断面図である。
【図5】本発明の実施形態による、応用装置内のヒューマンインターフェイス装置の断面図である。
【図6A】本発明の実施形態におけるヒューマンインターフェイス装置の部品である基板、ダイ、及び力伝達要素の斜視断面図である。
【図6B】本発明の実施形態におけるヒューマンインターフェイス装置の斜視断面図である。
【図7A】本発明の様々な実施形態のヒューマンインターフェイス装置内で利用できる弾性要素の斜視図である。
【図7B】本発明の様々な実施形態のヒューマンインターフェイス装置内で利用できる弾性要素の斜視図である。
【図7C】本発明の様々な実施形態のヒューマンインターフェイス装置内で利用できる弾性要素の斜視図である。
【図8】本発明の実施形態における、突出部を有する弾性要素を利用するヒューマンインターフェイス装置の斜視断面図である。
【図9】本発明の実施形態における、弾性要素を2つのバネ要素で構成したヒューマンインターフェイス装置の斜視断面図である。
【発明を実施するための形態】
【0008】
本開示の発明は、様々な修正及び代替形態が可能であるが、図面にはいくつかの実施形態を一例として示し、本明細書ではこれらの実施形態について説明する。しかしながら、本開示は、説明する特定の形態に本発明を限定することを意図するものではなく、むしろ添付の特許請求の範囲によって定められる本発明の思想及び範囲内に含まれる全ての修正物、代替物、及び同等物を網羅することを意図するものであると理解されたい。
【0009】
図1に、本明細書で説明する1又はそれ以上の実施形態によるヒューマンインターフェイス装置2の柔軟性及び有用性を示す。ヒューマンインターフェイス装置2は、小型の及び/又は薄型の電子装置に含めるのに適した小型の寸法を有し、その単純さにより収率が高く、過負荷に強く、製造が容易である。この点に関し、ヒューマンインターフェイス装置2は、ウェブ対応電話機、スマートフォン、携帯情報端末(PDA)装置、ゲーム機、ラップトップ、タブレットコンピュータ、ノートブック、パーソナルコンピュータ、カメラ、テレビ、オーブン、電子レンジ、全地球測位システム(GPS)、blu−rayプレーヤ、HD−DVDプレーヤ、DVDプレーヤ、その他の種類のポータブルコンピュータ及びインターネットアクセス機器及び装置、デジタル撮像装置、家庭用電化製品、車載装置、ナビゲーションシステムなどを含む様々な種類の電子装置に含めることができるX−Y軸のポインティング機能を提供する。ナビゲーションタスク又は情報コンテンツでは、ヒューマンインターフェイス装置2を、コンピュータマウス、ジョイスティック、スタイラス、リモコン装置、キーボード、キーパッド、ポータブルコンピュータ及びインターネットアクセス機器及び装置用のその他の種類の入力装置、家庭用電化製品、車載装置などの他のユーザインターフェイス制御装置に一体化することもできる。ヒューマンインターフェイス装置2は、約1.5mm以下の厚み及び約10mm以下の長さを有することができるが、他の寸法も想定される。
【0010】
ある実施形態では、ヒューマンインターフェイス装置を提供する。この装置は基板を有する。この装置は、基板に結合された歪み感応ダイも有し、このダイは、歪み感応ダイに加えられた力を示す電気信号を供給することができる。歪み感応ダイに隣接して力伝達要素が位置し、歪み感応ダイに結合される。力伝達要素には、平行移動要素が機械的に結合される。平行移動要素及び力伝達要素を弾性要素が少なくとも部分的に取り囲み、この平行移動要素と力伝達要素を機械的に結合する。平行移動要素に力が加わると、弾性要素が伸びる。弾性要素が伸びると、力伝達要素に力が加えられる。次に、この弾性要素によって力伝達要素に加えられた力が、歪み感応ダイに加えられる。
【0011】
ある実施形態では、力平行移動要素が、この平行移動要素に加えられた垂直の力が歪み感応ダイへ伝達されるのを防ぐような形状を有する。
【0012】
ある実施形態では、力伝達要素を少なくとも部分的に覆うハウジングが設けられる。
【0013】
ある実施形態では、ハウジングが、平行移動要素の動きに物理的制限を与える。
【0014】
ある実施形態では、弾性要素がバネである。
【0015】
ある実施形態では、ヒューマンインターフェイス装置が表面実装可能である。
【0016】
別の実施形態では、基板を有するヒューマンインターフェイス装置を提供する。基板には、加えられた力を示す電気信号を供給できる歪み感応ダイが結合される。歪み感応ダイに隣接して力伝達要素が位置し、歪み感応ダイに結合される。力伝達要素には、平行移動要素が機械的に結合される。平行移動要素及び力伝達要素には弾性要素が隣接して、この平行移動要素と力伝達要素を機械的に結合する。平行移動要素に力が加わると、弾性要素が伸びる。弾性要素が伸びると、力伝達要素に力が加えられる。次に、この弾性要素によって力伝達要素に加えられた力が、歪み感応ダイに加えられる。
【0017】
ある実施形態では、力平行移動要素が、この平行移動要素に加えられた垂直の力が歪み感応ダイへ伝達されるのを防ぐような形状を有する。
【0018】
ある実施形態では、力伝達要素を少なくとも部分的に覆うハウジングが設けられる。
【0019】
ある実施形態では、ハウジングが、平行移動要素の動きに物理的制限を与える。
【0020】
ある実施形態では、弾性要素がバネである。
【0021】
ある実施形態では、ヒューマンインターフェイス装置が表面実装可能である。
【0022】
図2〜図9に、ヒューマンインターフェイス装置の実施形態を順次詳細になっていくように示す。従って、図の各々における数字は同じ要素に対応する。
【0023】
本発明には、1)基板110、2)歪み感応ダイ120、3)力伝達要素130、4)平行移動要素140、5)バネ又は弾性要素150、及び6)ハウジング160という6つの機能要素が存在する。これらの機能要素が協働して、丈夫な薄型のヒューマンインターフェイス装置を作成するという目的を達成する。しかしながら、以下では6つの物理的に分離した要素として説明するが、単一の物理的要素内でいくつかの機能を組み合わせることも想定される。例えば、弾性機能と力伝達機能を単一の物理的要素内で実現することができる。例えば、以下でさらに詳述する図8の実施形態を参照されたい。
【0024】
基板110は、歪み感応ダイ120を装着するプラットフォームを提供し、ダイから反対面への電気的インターフェイスを定める役割を果たす。ヒューマンインターフェイス装置100は、応用装置のPCB(図示せず)に表面実装されることが想定される。ヒューマンインターフェイス装置100の基板110は、例えば、表面実装過程において装置のPCBに物理的及び電気的に取り付けられる面を定める。ある実施形態では、基板110が、セラミックのプリント回路基板材料又は同様のものであると想定される。基板110は、両面上に金属配線111(反対面は図示せず)を有する。基板110の一方の面に歪み感応ダイ120が装着され、反対側の面は装置のPCBに接続される。従って、平行移動要素140の動きを示す信号を、ヒューマンインターフェイス装置100から応用装置のPCBを介して応用装置へ通信することができる。
【0025】
歪み感応ダイ120は、ボス、弾性領域、外枠、及び歪み感応要素を含んで歪みを電気信号に変換するという点で、上記で引用した特許のものに類似する。ダイ120は、フリップチップ接続を介して基板110に装着されると想定される。しかしながら、当業者に周知のその他の結合方法も想定される。これにより、ダイ120と基板110の間の面に電気的インターフェイスが定められ、ダイ120の反対面には、ダイ120との機械的インターフェイスが実現される。この結果、電気的インターフェイスと機械的インターフェイスが分離した状態で保持されて、これらの間の干渉が避けられ、従って信頼性問題が起きる可能性が最低限に抑えられる。
【0026】
力伝達要素130は、ダイに横向きの力を印加するインターフェイスを提供し、ダイ120に垂直の力が到達するのを防ぐことができる。このことは、ダイ120を保護するのに役立ち、図示のように力伝達要素130が基板110上に載るように規制すること、又は平行移動要素が力伝達要素に垂直負荷を加える能力を限定するようにしてこれを制約することのいずれかによって実現することができる。
【0027】
力伝達要素130には、弾性要素150を介して平行移動要素140が接続される。ユーザが、平行移動要素140を直接的に又は間接的に動かすと、弾性要素150が、力伝達要素130上に対応する力を生成する。平行移動要素140は、横方向にしか動かないように規制される。平行移動要素140及び/又は力伝達要素130は、垂直軸を中心にダイ120に対して自由に回転することができ、従ってこの動きはダイ120から分断されている。
【0028】
基板110には、ヒューマンインターフェイス装置100全体を収容するハウジング160が取り付けられる。ハウジング160は、平行移動要素140に印加できる平行移動量を制限する役目を果たし、従って最終的には、ダイ110に加えられる最大力を制限する。ユーザが平行移動要素140に力を加えると、この平行移動要素140が動いて弾性要素150を伸ばす。弾性要素150は、その伸びた状態で力伝達要素130に力を加え、これがさらに歪み感応ダイ120に力を加える。ダイ120は、最初にユーザが加えた力に対応する電気的出力を生み出す。
【0029】
力伝達要素は、様々な方法で歪み感応ダイに係合又は別様に結合することができる。図6A及び図6Bにいくつかの例を示す。図6Aでは、力伝達要素630内の穴623及び歪み感応ダイ620のボス627内の穴625にピン622が係合している。ピン622は、ダイ620の囲壁又はシリンダ621に隣接してもよい。このピン622が、力伝達要素630に加えられた力を歪み感応ダイ620のボスに効果的に連結させる。ピン622は、力伝達要素630の頂面629に延びる高さを有する。別の実施形態では、力伝達要素が、ピン622と同様の形状ではあるが一体形成された部材(図示せず)を有し、これが歪み感応ダイ620の穴625内へ延びている。この部材は、ピン622と同じ役割を果たす。ピン622は、円筒形状であるように示しているが、当業者が想定するあらゆる形状を有することができ、当業者が想定するあらゆる材料で構成することができる。ピン622は、剛性を有することもできるが、他の実施形態では、例えば応用装置のPCBに信号を伝達する上で所望の感度及び/又は遅延を与えることができる軟質材料で構成することもできる。
【0030】
図6Bでは、力伝達要素630上にシリンダ636が形成され、又は力伝達要素630に取り付けられて、歪み感応ダイ620のボス624を取り囲む。シリンダ636は、ボス624に隣接し、及びいくつかの実施形態では接触し、従って力伝達要素630に加えられた力を歪み感応ダイ620に効果的に伝える。これらの例の各々では、加えられる剪断力に耐えられる強固な係合を実現することが目的である。またこれらの例では、主軸を中心とする回転が可能になることで、ユーザにより力伝達要素630に加えられるあらゆる回転力からダイが保護される。
【0031】
弾性要素は、円形、楕円形、矩形、又はその他の形状などの様々な形態又は形状をとることができる。図7Aに、弾性バンド750を示す。このバンド750は、例えばシリコーンなどの材料で作成される。他の弾性材料も想定される。図7Bには、弾性要素として弦巻バネ751を開示されている。このバネ751は、ステンレス製ワイヤで作成することができるが、プラスチックなどの他の弾性材料で作成することもできる。図7Cには、らせん状のバネの形をした別の弾性要素754を示している。このバネは、金属箔から化学エッチングすることができるが、プラスチックから成型することもできる。例えば、バネ754は、その中心孔752を介して(例えばピンなどを介して)力伝達要素に係合する一方で、平行移動要素の周辺部に接触できる突出部756を介して平行移動要素の周辺部に係合することもできる。別の実施形態では、らせんバネ754は突出部を有していない。使用する弾性要素の種類は、ヒューマンインターフェイス装置の所望の感度に基づいてよい。
【0032】
図8に、らせんバネ弾性要素850の例を示しており、この例では、力伝達要素830がらせんバネ弾性要素850の中心に一体化されている。より詳細には、力伝達要素830の延長部材832が、らせんバネ850内の空間に位置合わせされてこれに挿入される。図8にはこの空間を示していないが、これらは、らせんバネ754内の空間759と類似している。平行移動要素840は、湾曲した突出部852と、らせん状弾性要素850の周辺部で係合する。らせんバネ要素850の上下を逆にすることによって、これを平行移動要素840と一体化させることもでき、この結果、らせんバネ要素850が力平行移動要素830に係合して、湾曲した突出部852が力伝達要素830の周囲を取り囲むようになることが考えられる。
【0033】
図9に示す別の実施形態では、2つのらせんバネ950A、950Bを使用する。らせんバネ950Aは、湾曲した突出部952を有する。バネ950Bも突出部を有することにより、バネ950Aとバネ950Bの両方の突出部が互いに係合して噛み合う(明確には、一方のバネの突出部が他方のバネの突出部間に位置する)ようになることが考えられる。力伝達要素930が、第2のバネ950Bの中心と一体化される一方で、平行移動要素940が、バネ950Aの中心に一体化されるようになる。ある実施形態では、バネ950A及び950Bが同じ直径を有することができる。
【0034】
ここで図5を参照すると、ヒューマンインターフェイス装置200が、応用装置201内に装着されている。ヒューマンインターフェイス装置200の基板210は、応用装置のPCB202に表面実装される。上部ケース282及び下部ケース284が、応用装置201を収容する。上部ケース282の表面を通じてボタン270が突出し、ユーザによるアクセスを可能にする。ボタン270は、平行移動要素240に係合して、ボタン270が横方向に動かされると、平行移動要素240が対応して動くようになる。ボタン270は、装置200のハウジング260上に位置してもよい。
【0035】
本明細書では、本発明者らが認識する本発明を実施するための最良の形態を含む本発明の好ましい実施形態を説明した。図示の実施形態は例示にすぎず、本発明の範囲を限定すると解釈すべきではないことを理解されたい。
【特許請求の範囲】
【請求項1】
基板と、
前記基板に結合された歪み感応ダイであって、この歪み感応ダイに加えられた力を示す電気信号を供給可能である歪み感応ダイと、
前記歪み感応ダイに隣接して位置し、前記歪み感応ダイに結合された力伝達要素と、
前記力伝達要素に機械的に結合された平行移動要素と、
前記平行移動要素及び前記力伝達要素を少なくとも部分的に取り囲み、該平行移動要素と該力伝達要素を機械的に結合する弾性要素と、を備え、
前記平行移動要素に力が加わると前記弾性要素が伸び、
前記弾性要素が伸びると前記力伝達要素に力が加えられ、
前記弾性要素によって前記力伝達要素に加えられた力が、前記歪み感応ダイに加えられる、
ことを特徴とするヒューマンインターフェイス装置。
【請求項2】
前記力平行移動要素が、該平行移動要素に加えられた垂直の力が前記歪み感応ダイに伝達されるのを防ぐような形状を有する、
ことを特徴とする請求項1に記載のヒューマンインターフェイス装置。
【請求項3】
前記力伝達要素を少なくとも部分的に覆うハウジングをさらに備える、
ことを特徴とする請求項1に記載のヒューマンインターフェイス装置。
【請求項4】
前記ハウジングが、前記平行移動要素の動きに物理的制限を与える、
ことを特徴とする請求項3に記載のヒューマンインターフェイス装置。
【請求項5】
前記弾性要素がバネである、
ことを特徴とする請求項1に記載のヒューマンインターフェイス装置。
【請求項6】
表面実装可能である、
ことを特徴とする請求項1に記載のヒューマンインターフェイス装置。
【請求項7】
基板と、
前記基板に結合された歪み感応ダイであって、この歪み感応ダイに加えられた力を示す電気信号を供給可能である歪み感応ダイと、
前記歪み感応ダイに隣接して位置し、該歪み感応ダイに結合された力伝達要素と、
前記力伝達要素に機械的に結合された平行移動要素と、
前記平行移動要素及び前記力伝達要素に隣接して、該平行移動要素と該力伝達要素を機械的に結合する弾性要素と、を備え、
前記平行移動要素に力が加わると前記弾性要素が伸び、
前記弾性要素が伸びると前記力伝達要素に力が加えられ、
前記弾性要素によって前記力伝達要素に加えられた力が前記歪み感応ダイに加えられる、
ことを特徴とするヒューマンインターフェイス装置。
【請求項8】
前記力平行移動要素が、該平行移動要素に加えられた垂直の力が前記歪み感応ダイに伝達されるのを防ぐような形状を有する、
ことを特徴とする請求項7に記載のヒューマンインターフェイス装置。
【請求項9】
前記力伝達要素を少なくとも部分的に覆うハウジングをさらに備える、
ことを特徴とする請求項7に記載のヒューマンインターフェイス装置。
【請求項10】
前記ハウジングが、前記平行移動要素の動きに物理的制限を与える、
ことを特徴とする請求項9に記載のヒューマンインターフェイス装置。
【請求項11】
前記弾性要素がバネである、
ことを特徴とする請求項7に記載のヒューマンインターフェイス装置。
【請求項12】
表面実装可能である、
ことを特徴とする請求項7に記載のヒューマンインターフェイス装置。
【請求項1】
基板と、
前記基板に結合された歪み感応ダイであって、この歪み感応ダイに加えられた力を示す電気信号を供給可能である歪み感応ダイと、
前記歪み感応ダイに隣接して位置し、前記歪み感応ダイに結合された力伝達要素と、
前記力伝達要素に機械的に結合された平行移動要素と、
前記平行移動要素及び前記力伝達要素を少なくとも部分的に取り囲み、該平行移動要素と該力伝達要素を機械的に結合する弾性要素と、を備え、
前記平行移動要素に力が加わると前記弾性要素が伸び、
前記弾性要素が伸びると前記力伝達要素に力が加えられ、
前記弾性要素によって前記力伝達要素に加えられた力が、前記歪み感応ダイに加えられる、
ことを特徴とするヒューマンインターフェイス装置。
【請求項2】
前記力平行移動要素が、該平行移動要素に加えられた垂直の力が前記歪み感応ダイに伝達されるのを防ぐような形状を有する、
ことを特徴とする請求項1に記載のヒューマンインターフェイス装置。
【請求項3】
前記力伝達要素を少なくとも部分的に覆うハウジングをさらに備える、
ことを特徴とする請求項1に記載のヒューマンインターフェイス装置。
【請求項4】
前記ハウジングが、前記平行移動要素の動きに物理的制限を与える、
ことを特徴とする請求項3に記載のヒューマンインターフェイス装置。
【請求項5】
前記弾性要素がバネである、
ことを特徴とする請求項1に記載のヒューマンインターフェイス装置。
【請求項6】
表面実装可能である、
ことを特徴とする請求項1に記載のヒューマンインターフェイス装置。
【請求項7】
基板と、
前記基板に結合された歪み感応ダイであって、この歪み感応ダイに加えられた力を示す電気信号を供給可能である歪み感応ダイと、
前記歪み感応ダイに隣接して位置し、該歪み感応ダイに結合された力伝達要素と、
前記力伝達要素に機械的に結合された平行移動要素と、
前記平行移動要素及び前記力伝達要素に隣接して、該平行移動要素と該力伝達要素を機械的に結合する弾性要素と、を備え、
前記平行移動要素に力が加わると前記弾性要素が伸び、
前記弾性要素が伸びると前記力伝達要素に力が加えられ、
前記弾性要素によって前記力伝達要素に加えられた力が前記歪み感応ダイに加えられる、
ことを特徴とするヒューマンインターフェイス装置。
【請求項8】
前記力平行移動要素が、該平行移動要素に加えられた垂直の力が前記歪み感応ダイに伝達されるのを防ぐような形状を有する、
ことを特徴とする請求項7に記載のヒューマンインターフェイス装置。
【請求項9】
前記力伝達要素を少なくとも部分的に覆うハウジングをさらに備える、
ことを特徴とする請求項7に記載のヒューマンインターフェイス装置。
【請求項10】
前記ハウジングが、前記平行移動要素の動きに物理的制限を与える、
ことを特徴とする請求項9に記載のヒューマンインターフェイス装置。
【請求項11】
前記弾性要素がバネである、
ことを特徴とする請求項7に記載のヒューマンインターフェイス装置。
【請求項12】
表面実装可能である、
ことを特徴とする請求項7に記載のヒューマンインターフェイス装置。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6a】
【図6b】
【図7a】
【図7b】
【図7c】
【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6a】
【図6b】
【図7a】
【図7b】
【図7c】
【図8】
【図9】
【公表番号】特表2013−506971(P2013−506971A)
【公表日】平成25年2月28日(2013.2.28)
【国際特許分類】
【出願番号】特願2012−533281(P2012−533281)
【出願日】平成22年10月6日(2010.10.6)
【国際出願番号】PCT/US2010/051642
【国際公開番号】WO2011/044244
【国際公開日】平成23年4月14日(2011.4.14)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.Blu−ray
【出願人】(504195059)ノウルズ エレクトロニクス リミテッド ライアビリティ カンパニー (5)
【Fターム(参考)】
【公表日】平成25年2月28日(2013.2.28)
【国際特許分類】
【出願日】平成22年10月6日(2010.10.6)
【国際出願番号】PCT/US2010/051642
【国際公開番号】WO2011/044244
【国際公開日】平成23年4月14日(2011.4.14)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.Blu−ray
【出願人】(504195059)ノウルズ エレクトロニクス リミテッド ライアビリティ カンパニー (5)
【Fターム(参考)】
[ Back to top ]