
薬液塗布方法および薬液塗布装置
【課題】液滴ジェット方式を用いて媒体へ薬液を塗布するにあたって、薬液を求められる量だけ正確に塗布可能とする技術を提供する。
【解決手段】薬液塗布装置1の制御部60は、塗布ヘッド31と基材シート90とを相対的に移動させつつ、塗布ヘッド31の積層圧電素子に制御信号を印加して塗布ヘッド31のノズルから基材シート90に薬液を吐出させることによって、塗布処理を実行させる。塗布処理に先立って、制御部60は、積層圧電素子を駆動する制御信号の周波数の変化に伴う、ノズルから吐出される液滴量の変動情報を取得し、当該変動情報を用いて、塗布処理において塗布ヘッド31と基材シート90とを相対的に移動させる相対移動速度と、積層圧電素子320に印加する制御信号の周波数とを決する。
【解決手段】薬液塗布装置1の制御部60は、塗布ヘッド31と基材シート90とを相対的に移動させつつ、塗布ヘッド31の積層圧電素子に制御信号を印加して塗布ヘッド31のノズルから基材シート90に薬液を吐出させることによって、塗布処理を実行させる。塗布処理に先立って、制御部60は、積層圧電素子を駆動する制御信号の周波数の変化に伴う、ノズルから吐出される液滴量の変動情報を取得し、当該変動情報を用いて、塗布処理において塗布ヘッド31と基材シート90とを相対的に移動させる相対移動速度と、積層圧電素子320に印加する制御信号の周波数とを決する。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、塗布対象物とする媒体へ薬液を塗布する技術に関する。
【背景技術】
【0002】
皮膚等に貼着して使用される貼付剤は、例えば、不織布や樹脂シート等の媒体上に薬剤を塗布することにより製造される。貼付剤の製造は、例えば、バーコーター、ダイコーター等を用いて帯状の媒体に薬剤を展延塗布(いわゆるベタ塗り)し、そこから必要な部分を打ち抜くとともに、不要な部分を除去することにより行われていた(例えば、特許文献1〜3参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2009−108006号公報
【特許文献2】特開2006−223611号公報
【特許文献3】特開平3−85160号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
従来の貼付剤の製造技術では、不要部分に塗布されていた高価な薬剤も除去されることになるため、薬剤の使用効率が悪く、貼付剤の製造コストがその分高くなるという問題があった。
【0005】
そこで、媒体への塗布手段として液滴ジェット方式を用いて、必要部分だけ塗布液を塗布可能とすることができれば、不要部分に塗布される薬剤の量が大幅に低減され、薬剤の製造コストを低減することが可能となる。
【0006】
ところで、液滴ジェット方式を貼付剤の製造用途に用いる場合(すなわち、液滴ジェット方式を用いて媒体へ薬液を塗布する場合)、液滴ジェット方式を印刷用途に用いる場合(すなわち、液滴ジェット方式を用いて紙などの媒体へインクを塗布して画像形成する場合)よりもはるかに高精度に、塗布される液滴の量を制御することが必要となってくる。
【0007】
すなわち、液滴ジェット方式が印刷用途で用いられる場合、液滴ジェットヘッドから吐出される液滴量が微小に(例えば、10%〜20%程度)変動し、これによって、媒体上に塗布されるインクの量が目標量よりも僅かに多く(あるいは、僅かに少なく)なっても、ほとんど問題にはならない。というのも、このような微小な変動が印刷物の濃度に与える影響は目視でわからない程度のものであり、印刷品質に与える影響は無視することができるからである。
【0008】
一方、液滴ジェット方式が貼付剤の製造用途で用いられる場合、このような誤差は許されない。媒体上に薬液が目標量だけ正確に塗布されないと、貼付剤の品質(たとえば、貼付剤の効能)に深刻な影響が出てしまうからである。
【0009】
この発明は、上記の課題に鑑みてなされたものであり、液滴ジェット方式を用いて媒体へ薬液を塗布するにあたって、薬液を求められる量だけ正確に塗布可能とする技術を提供することを目的とする。
【課題を解決するための手段】
【0010】
請求項1に記載の発明は、駆動素子が設けられたノズルを備える塗布ヘッドから、前記塗布ヘッドに対して相対的に移動する媒体に向けて薬剤を含む薬液の液滴を吐出させることにより、前記媒体に前記薬液を塗布する薬液塗布方法であって、a)前記駆動素子に与える制御信号の周波数の変化に伴う、前記ノズルから吐出される液滴量の変動情報を取得する工程と、b)塗布処理において前記塗布ヘッドと前記媒体とを相対的に移動させる相対移動速度と、当該塗布処理において前記駆動素子に与える制御信号の周波数とを、前記変動情報を用いて決定する工程と、c)前記b)工程で決定された相対移動速度で前記塗布ヘッドと前記媒体とを相対的に移動させつつ、前記b)工程で決定された周波数の制御信号を前記駆動素子に与えて前記ノズルから前記媒体に向けて前記薬液の液滴を吐出させることによって、塗布処理を実行させる工程と、を備える。
【0011】
請求項2に記載の発明は、請求項1に記載の薬液塗布方法であって、前記変動情報が、周波数の複数の代表値のそれぞれと、周波数を当該代表値とした制御信号を前記駆動素子に与えた場合に前記ノズルから吐出される液滴量とを対応付けて記憶したテーブルの形で保持されており、前記b)工程において、前記複数の代表値のそれぞれについて、周波数を当該代表値として塗布処理を行う場合に前記媒体に目標塗布量の薬液を塗布可能な相対移動速度の値を前記変動情報に基づいて算出し、当該算出された値を当該代表値と対にしてパラメータ候補として取得し、前記複数の代表値に基づいて取得された複数の前記パラメータ候補のうち、オペレータにより選択された一のパラメータ候補において対にされている前記代表値と前記算出された値とを、前記塗布処理における前記周波数と前記相対移動速度とにそれぞれ決定する。
【0012】
請求項3に記載の発明は、請求項1または2に記載の薬液塗布方法であって、前記変動情報が、周波数の複数の代表値のそれぞれと、周波数を当該代表値とした制御信号を前記駆動素子に与えた場合に前記ノズルから吐出される液滴量とを対応付けて記憶したテーブルの形で保持されており、前記b)工程において、前記複数の代表値のうち、オペレータが周波数の値として選択した一の代表値について、周波数を当該代表値として塗布処理を行う場合に前記媒体に目標塗布量の薬液を塗布可能な相対移動速度の値を前記変動情報に基づいて算出し、オペレータにより選択された前記代表値と前記算出された値とを、前記塗布処理における前記周波数と前記相対移動速度とにそれぞれ決定する。
【0013】
請求項4に記載の発明は、請求項1から3のいずれかに記載の薬液塗布方法であって、d)オペレータが目標塗布量の変更を指示した場合に、周波数を現状の設定値のままとしつつ前記媒体に指示された新たな目標塗布量の薬液を塗布可能な相対移動速度の値を算出し、当該算出された値を前記塗布処理における新たな相対移動速度に再決定する工程と、e)前記駆動素子に与える制御信号の周波数を変化させずに前記ノズルから前記媒体に向けて前記薬液の液滴を吐出させつつ、前記d)工程で再決定された前記新たな相対移動速度で前記塗布ヘッドと前記媒体とを相対的に移動させることによって、前記塗布処理を実行させる工程と、を備える。
【0014】
請求項5に記載の発明は、請求項1または4に記載の薬液塗布方法であって、前記変動情報が、前記駆動素子に与える制御信号の周波数の変化に伴う、前記ノズルから吐出される液滴量の変動を表す関数の形で保持されており、前記b)工程において、オペレータが周波数の値として入力した値について、周波数を当該入力値として塗布処理を行う場合に前記媒体に目標塗布量の薬液を塗布可能な相対移動速度の値を前記変動情報に基づいて算出し、前記入力値と前記算出された値とを、前記塗布処理における前記周波数と前記相対移動速度とにそれぞれ決定する。
【0015】
請求項6に記載の発明は、請求項1、4、5のいずれかに記載の薬液塗布方法であって、前記変動情報が、前記駆動素子に与える制御信号の周波数の変化に伴う、前記ノズルから吐出される液滴量の変動を表す関数の形で保持されており、前記b)工程において、オペレータが相対移動速度の値として入力した値について、相対移動速度を前記入力値として塗布処理を行う場合に前記媒体に目標塗布量の薬液を塗布可能な制御信号の周波数の値を前記変動情報に基づいて算出し、前記算出された値と前記入力値とを、前記塗布処理における前記周波数と前記相対移動速度とにそれぞれ決定する。
【0016】
請求項7に記載の発明は、媒体に向けて、駆動素子が設けられたノズルから薬剤を含む薬液を液滴として吐出する塗布ヘッドと、前記塗布ヘッドと前記媒体とを相対的に移動させる相対移動機構と、前記駆動素子に与える制御信号の周波数の変化に伴う、前記ノズルから吐出される液滴量の変動情報を記憶する変動情報記憶部と、塗布処理に先立って、当該塗布処理において前記塗布ヘッドと前記媒体とを相対的に移動させる相対移動速度と、当該塗布処理において前記駆動素子に与える制御信号の周波数とを、前記変動情報を用いて決定するパラメータ決定部と、前記相対移動機構を制御して、前記パラメータ決定部により決定された相対移動速度で前記塗布ヘッドと前記媒体とを相対的に移動させつつ、前記パラメータ決定部により決定された周波数の制御信号を前記駆動素子に与えて前記ノズルから前記媒体に向けて前記薬液の液滴を吐出させることによって、塗布処理を実行させる塗布処理制御部と、を備える。
【0017】
請求項8に記載の発明は、請求項7に記載の薬液塗布装置であって、前記変動情報が、周波数の複数の代表値のそれぞれと、周波数を当該代表値とした制御信号を前記駆動素子に与えた場合に前記ノズルから吐出される液滴量とを対応付けて記憶したテーブルの形で保持されており、前記パラメータ決定部が、前記複数の代表値のそれぞれについて、周波数を当該代表値として塗布処理を行う場合に前記媒体に目標塗布量の薬液を塗布可能な相対移動速度の値を前記変動情報に基づいて算出し、当該算出された値を当該代表値と対にしてパラメータ候補として取得し、前記複数の代表値に基づいて取得された複数の前記パラメータ候補のうち、オペレータにより選択された一のパラメータ候補において対にされている前記代表値と前記算出された値とを、前記塗布処理における前記周波数と前記相対移動速度とにそれぞれ決定する。
【0018】
請求項9に記載の発明は、請求項7または8に記載の薬液塗布装置であって、前記変動情報が、周波数の複数の代表値のそれぞれと、周波数を当該代表値とした制御信号を前記駆動素子に与えた場合に前記ノズルから吐出される液滴量とを対応付けて記憶したテーブルの形で保持されており、前記パラメータ決定部が、前記複数の代表値のうち、オペレータが周波数の値として選択した一の代表値について、周波数を当該代表値として塗布処理を行う場合に前記媒体に目標塗布量の薬液を塗布可能な相対移動速度の値を前記変動情報に基づいて算出し、オペレータにより選択された前記代表値と前記算出された値とを、前記塗布処理における前記周波数と前記相対移動速度とにそれぞれ決定する。
【0019】
請求項10に記載の発明は、請求項7から9のいずれかに記載の薬液塗布装置であって、前記パラメータ決定部が、オペレータが前記目標塗布量の変更を指示した場合に、周波数を現状の設定値のままとしつつ前記媒体に指示された新たな目標塗布量の薬液を塗布可能な相対移動速度の値を算出し、当該算出された値を前記塗布処理における新たな相対移動速度に再決定し、前記塗布処理制御部が、前記駆動素子に与える制御信号の周波数を変化させずに前記ノズルから前記媒体に向けて前記薬液の液滴を吐出させつつ、前記パラメータ決定部が再決定した前記新たな相対移動速度で前記塗布ヘッドと前記媒体とを相対的に移動させることによって、前記塗布処理を実行させる。
【0020】
請求項11に記載の発明は、請求項7または10に記載の薬液塗布装置であって、前記変動情報が、前記駆動素子に与える制御信号の周波数の変化に伴う、前記ノズルから吐出される液滴量の変動を表す関数の形で保持されており、前記パラメータ決定部が、オペレータが周波数の値として入力した値について、周波数を当該入力値として塗布処理を行う場合に前記媒体に目標塗布量の薬液を塗布可能な相対移動速度の値を前記変動情報に基づいて算出し、前記入力値と前記算出された値とを、前記塗布処理における前記周波数と前記相対移動速度とにそれぞれ決定する。
【0021】
請求項12に記載の発明は、請求項7、10、11のいずれかに記載の薬液塗布装置であって、前記変動情報が、前記駆動素子に与える制御信号の周波数の変化に伴う、前記ノズルから吐出される液滴量の変動を表す関数の形で保持されており、前記パラメータ決定部が、オペレータが相対移動速度の値として入力した値について、相対移動速度を前記入力値として塗布処理を行う場合に前記媒体に目標塗布量の薬液可能な前記制御信号の周波数の値を前記変動情報に基づいて算出し、前記算出された値と前記入力値とを、前記塗布処理における前記周波数と前記相対移動速度とにそれぞれ決定する。
【発明の効果】
【0022】
請求項1,7に記載の発明によると、塗布処理において、塗布ヘッドと媒体とを相対的に移動させる速度と、駆動素子に与える制御信号の周波数とを、制御信号の周波数の変化に伴う液滴量の変動を加味して決定するので、媒体へ薬液を求められる量だけ正確に塗布することができる。
【0023】
請求項2、8に記載の発明によると、複数のパラメータ候補のうち、オペレータが選択したパラメータ候補を採用する。したがって、オペレータが所望するとおりの態様(例えば、オペレータが所望するとおりの処理速度、解像度)で、塗布処理を行うことができる。
【0024】
請求項3、9に記載の発明によると、周波数の複数の代表値のうち、オペレータが選択した値を塗布処理における制御信号の周波数として採用するので、オペレータが所望するとおりの態様で塗布処理を行うことができる。
【0025】
請求項4、10に記載の発明によると、オペレータが目標塗布量の変更を指示した場合に、駆動素子に与える制御信号の周波数を変化させずに、塗布ヘッドと媒体とを相対的に移動させる相対移動速度を変更することによって、塗布量を変更する。この構成によると、ノズルから単位時間あたりに吐出される液滴量が変化しないので、簡易かつ正確に、塗布される薬液の量を新たな塗布量に変更することができる。
【0026】
請求項5、11に記載の発明によると、オペレータが入力した値を塗布処理における制御信号の周波数とするので、オペレータが所望するとおりの態様で塗布処理を行うことができる。
【0027】
請求項6、12に記載の発明によると、オペレータが入力した値を、塗布処理における相対移動速度とするので、オペレータが所望するとおりの態様で塗布処理を行うことができる。
【図面の簡単な説明】
【0028】
【図1】薬液塗布装置の要部構成の一部を示す図である。
【図2】薬液塗布装置の要部構成を模式的に示す図である。
【図3】制御部の構成を示すブロック図である。
【図4】塗布ヘッドの断面図である。
【図5】塗布ヘッドの断面図である。
【図6】制御信号の波形の一例を模式的に示す図である。
【図7】貼付剤の製造工程を説明するための図である。
【図8】制御信号の駆動周波数の変化に伴うドロップマスの変動の様子を模式的に示す図である。
【図9】変動情報テーブルの構成例を示す図である。
【図10】塗布処理のパラメータを決定する処理の流れを示す図である。
【図11】パラメータの値の組み合わせを算出する処理の流れを示す図である。
【図12】パラメータ候補を一覧表示する画面の構成例を示す図である。
【図13】塗布処理のパラメータを決定する処理の流れを示す図である。
【図14】パラメータを再決定する処理の流れを示す図である。
【図15】パラメータを再決定する処理の流れを示す図である。
【図16】変動情報関数を例示する図である。
【図17】塗布処理のパラメータを決定する処理の流れを示す図である。
【発明を実施するための形態】
【0029】
以下、図面を参照しつつ本発明の実施の形態に係る薬液塗布装置について詳細に説明する。薬液塗布装置は、基材シートに薬剤を塗布して貼付剤を製造する装置である。
【0030】
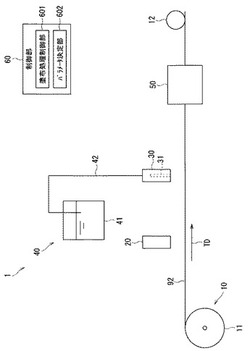
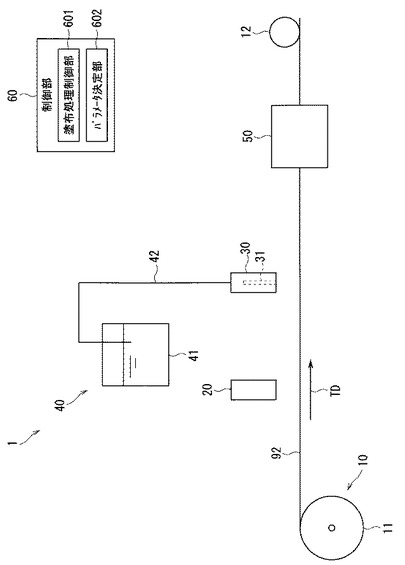
<1.装置構成>
薬液塗布装置1の構成について、図1、図2を参照しながら説明する。図1は、薬液塗布装置の要部構成の一部を示す図である。図2は、薬液塗布装置1の要部構成を模式的に示す図である。
【0031】
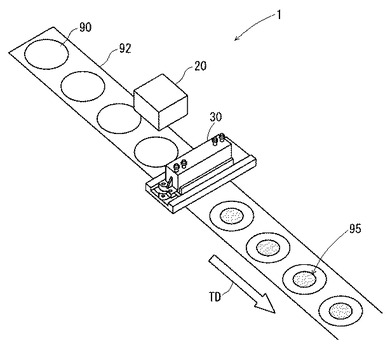
薬液塗布装置1は、予め粘着剤が塗られた帯状の支持体92上に塗布対象物(ここでは、円形の基材シート)90を一定間隔で貼設し、その基材シート90上に薬液を塗布する装置である。
【0032】
薬液塗布装置1は、図2に示すように、帯状の支持体92を水平方向に沿って搬送する搬送機構10と、搬送される支持体92上に貼設された基材シート90の位置を検出する位置検出センサ20と、基材シート90に薬剤を含む薬液を吹き付けて塗布する塗布ユニット30と、塗布ユニット30に薬液を送給する薬液送給部40と、基材シート90に塗布した薬液を乾燥させる乾燥ユニット50とを備える。また、薬液塗布装置1は、装置に設けられた上記の各要素を制御する制御部60を備える。
【0033】
<搬送機構10>
搬送機構10は、長尺の帯状の支持体92が巻回された送りローラ11を備える。搬送機構10は、図示を省略するテンションローラや補助ローラをも備えており、送りローラ11から送り出された支持体92を水平方向に沿って搬送する。支持体92は、塗布ユニット30に基材シート90を順次搬送供給する役割を担うものであり、ネル生地、織布、メリヤス、不織布、樹脂フィルムなどにて形成することができる。支持体92の幅は例えば60mmである。この実施の形態においては、送りローラ11に巻回された支持体92の片面全面に予め粘着剤91が積層されており(図7参照)、搬送機構10は、粘着剤91の層が既に形成された支持体92を送りローラ11から送り出し、粘着剤層が上側を向くように支持体92を搬送する。
【0034】
また、薬液塗布装置1は、送りローラ11の近傍に図示を省略するシート供給機構を備えており、そのシート供給機構によって送りローラ11から送り出された支持体92に塗布対象物となる円板形状の基材シート90を供給する。薬剤を直接担持する基材シート90は、薬剤に対する不透過性を有する樹脂材料(例えば、PET(ポリエチレンテレフタレート)、PP(ポリプロピレン)、PE(ポリエチレン)等)により形成されている。
【0035】
また、薬液塗布装置1は、エンコーダ12を備えている。エンコーダ12は、支持体92が搬送機構10により所定距離だけ搬送される毎にパルス信号を出力する。エンコーダ12としては、例えば、支持体92の搬送量に応じて回転し、所定の回転量毎にパルス信号を出力するロータリーエンコーダを用いることができる。
【0036】
<位置検出センサ20>
位置検出センサ20は、基材シート90の搬送方向について塗布ユニット30よりも上流側に設けられている。位置検出センサ20は、塗布ヘッド31から薬液の液滴が吹き付けられる前に、支持体92上における基材シート90の位置を検出する。位置検出センサ20によって検出された基材シート90の位置情報に基づいて、その基材シート90に正確に薬液の液滴が吹き付けられるように制御部60が塗布ヘッド31の薬液吐出位置を制御する。位置検出センサ20としては、反射式若しくは透過式の光学式センサ、または、超音波センサなどの各種センサを用いることができる。また、位置検出センサ20に代えて撮像カメラを設け、その撮像カメラによって支持体92上面を撮像して得られた画像データを処理することによって基材シート90の位置を検出するようにしてもよい。
【0037】
<塗布ユニット30>
塗布ユニット30は、搬送機構10によって搬送される基材シート90に薬剤を含む薬液を塗布する機能部であり、機械的に固定して内包された塗布ヘッド31を備える。
【0038】
塗布ヘッド31は、薬剤を含む薬液を微滴化して微小液滴を生成し、その液滴を搬送機構10によって搬送される基材シート90の上面に吹き付ける。具体的には、塗布ヘッド31は、搬送方向TDに垂直な方向(支持体92の幅方向)に沿って、支持体92の全幅と同等かそれ以上の幅を有する。また、塗布ヘッド31の下面には、複数個のノズル311(図4参照)が設けられている。複数個のノズル311は、搬送方向TDに垂直な方向に沿って、所定のピッチで一列に配列される。後に詳細に説明するように、制御部60は、積層圧電素子320の駆動部321に電圧を印加することにより、ノズル311から薬液を吐出させる。なお、支持体92の幅方向におけるノズル311の配列ピッチは、これが小さいほど薬液塗布の精度を向上させることができるため、なるべく小さくすることが好ましい。塗布ヘッド31の具体的な内部構造については、後に説明する。
【0039】
なお、塗布ユニット30には、塗布ユニット30に設けられた塗布ヘッド31を加熱または冷却して薬液の温調を行う温調部(図示省略)を付設してもよい。温調部としては、所定温度の温調水を導入する温調配管、または、ヒータを用いることができる。薬液の粘度および表面張力は薬液の温度にも依存するところ、温調部により薬液の温調を行うことによって薬液の粘度および表面張力が液滴ジェット方式のノズルから噴出可能な適正範囲内に収まるように調整することができる。また、薬液の粘度および表面張力が変化すると、ノズルの先端付近に形成される薬液のメニスカス量が変化し、ノズルから噴出される液滴の量が変化するという問題も生じるところ、温調部により塗布ヘッド31内の薬液の温度を一定(例えば20℃)に保つことによって、ノズルから噴出される液滴の量も一定にすることができる。温調部は、塗布ヘッド31内に内蔵してもよい。
【0040】
<薬液送給部40>
薬液送給部40は、塗布ユニット30に薬液を送給する。薬液送給部40は、薬液を貯留する薬液タンク41を備える。薬液タンク41は、供給配管42を介して塗布ユニット30の塗布ヘッド31と連通接続されている。供給配管42の経路途中には異物除去フィルターおよび脱気フィルター(いずれも図示省略)が介挿されている。薬液タンク41は、常に一定量の薬液を貯留しており、調合タンク(図示省略)から適宜薬液タンク41に薬液が補充される。
【0041】
ここで、薬液とは薬剤を含む液体である。貼付剤に用いられる薬剤の具体的な種類は特に限定されるものではないが、皮膚を通して投与し得るもの、すなわち経皮吸収可能な薬剤が好ましい。そのような薬剤として、より具体的には、インドメタシン、ケトプロフェン、フルルビプロフェン、イブプロフェン、ビロキシカム、サリチル酸メチル、サリチル酸グリコール、l-メントール、dl-カンフル、ノニル酸ワリニリルアシド、カプサイシンなどの鎮痛消炎剤があげられる。また、ニトログリセリン、ニフェジピン、イソソルバイドナイトレートなどの冠血管拡張剤、または、プロカテロール、ツロブテロールなどの喘息薬を薬剤として使用してもよい。さらに、上記の他にも薬剤としては、全身性麻酔薬、催眠・鎮静薬、抗てんかん薬、鎮暈薬、精神神経用薬、骨格筋弛緩薬、自律神経用薬、鎮痙薬、抗パーキンソン薬、抗ヒスタミン薬、強心薬、不整脈用薬、利尿薬、血圧降下薬、血管収縮薬、末梢血管拡張薬、動脈硬化用薬、循環器用薬、呼吸促進薬、鎮咳去痰薬、ホルモン薬、化膿性疾患用外用薬、鎮痛・鎮痒・収斂・消炎用薬、寄生性皮膚疾患用薬、止血用薬、痛風治療用薬、糖尿病用薬、抗悪性腫瘍用薬、抗生物質、化学療法薬、麻薬、抗うつ用薬、禁煙補助薬(ニコチン)などを使用することができる。
【0042】
このような薬剤が溶媒中に溶解されて薬液とされている。溶媒としては、薬剤の性質に応じて、水、または、アルコールを用いることができる。薬剤が溶媒中に溶解された所定濃度の薬液が調合タンクにて調合され、その薬液が調合タンクから供給されて薬液タンク41に貯留される。薬液タンク41に貯留されている薬液は、塗布ヘッド31が薬液を噴出したときにノズル内に生じる毛管現象によって各ノズルに送給される。薬液の送給過程において、供給配管42を流れる薬液から異物および気泡が異物除去フィルターおよび脱気フィルターによってそれぞれ取り除かれる。なお、薬液には、基材シート90への密着性を高めるバインダー、および/または、添加剤がさらに含まれていてもよい。また、薬液には、薬液の粘度および表面張力を調整するために薬剤の溶媒が添加されてもよい。また、薬液には、薬液の乾燥速度を低下させるために保湿剤が添加されてもよい。
【0043】
また、薬液送給部40は、薬液タンク41から供給配管42を介して塗布ユニット30の塗布ヘッド31に負圧を付与する負圧ポンプ(図示省略)を備えてもよい。ノズルに供給された薬液は、そのままでは自重でノズルの先端付近に液滴ジェット方式に適したメニスカスを形成できないところ、負圧ポンプによって吐出方向とは逆向きの負圧を薬液に与えておけば、薬液を若干ノズル内に引き戻して適正なメニスカスを形成することができる。さらに、薬液タンク41の下部に、薬液タンク41内の薬液の温度を所定温度(例えば20℃)に温調するための温調機(図示省略)を付設してもよい。
【0044】
<乾燥ユニット50>
乾燥ユニット50は、塗布ユニット30よりも基材シート90の搬送方向下流側に設けられている。乾燥ユニット50は、その内側を通過する基材シート90に塗布されている薬液を乾燥させる。乾燥ユニット50としては、基材シート90の表面に常温のドライエアーまたは加熱したドライエアー(温風)を送風するものなど公知の種々の乾燥装置を用いることができる。また、乾燥ユニット50としては、単なる熱風(特段の除湿を行っていない)を供給する熱風乾燥炉や遠赤外線ヒータを用いた乾燥炉を用いるようにしてもよい。
【0045】
<制御部60>
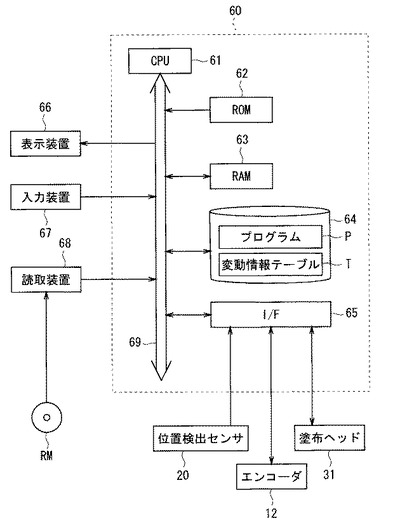
制御部60は、薬液塗布装置1に設けられた上記の種々の動作機構を制御する。制御部60の構成について、図3を参照しながら具体的に説明する。図3は、制御部60の構成例を示すブロック図である。
【0046】
制御部60のハードウェアとしての構成は一般的なコンピュータと同様である。すなわち、制御部60は、各種演算処理を行うCPU61、基本プログラムを記憶する読み出し専用のメモリであるROM62、各種情報を記憶する読み書き自在のメモリであるRAM63、および、処理プログラムPやデータなどを記憶しておく固定ディスク64をバスライン69に接続して構成されている。
【0047】
また、バスライン69には、上述したエンコーダ12、位置検出センサ20、および、塗布ヘッド31がインターフェイス(I/F)65を介して接続されている。これら以外の薬液塗布装置1の各種動作機構も図示を省略するインターフェイスを介してバスライン69に接続されている。制御部60のCPU61は、固定ディスク64に格納されている処理プログラムPを実行することにより、これら塗布ヘッド31などの各動作機構を制御して貼付剤製造処理を進行させる。
【0048】
また、バスライン69には、表示装置66および入力装置67が電気的に接続されている。表示装置66は、例えば液晶ディスプレイ等を用いて構成されており、処理結果やメッセージ等の種々の情報を表示する。入力装置67は、例えばキーボードやマウス等を用いて構成されており、コマンドやパラメータ等の入力を受け付ける。装置のオペレータは、表示装置66に表示された内容を確認しつつ入力装置67からコマンドやパラメータ等の入力を行うことができる。なお、表示装置66と入力装置67とを一体化してタッチパネルとして構成するようにしてもよい。
【0049】
さらに、バスライン69には、DVDやCDなどの記録媒体RMから記録内容を読み取る読取装置68が接続されている。処理プログラムPは、記録媒体RMから読取装置68によって読み出されて固定ディスク64に格納されるようにしてもよい。
【0050】
以上が、薬液塗布装置1の主たる構成要素である。なお、上記の構成以外にも薬液塗布装置1は、詳説を省略する種々の機構を備えている。例えば、乾燥ユニット50よりもさらに下流側には、薬液が塗布された基材シート90に剥離ライナーを貼り合わせる機構や支持体92を裁断する機構が設けられている。
【0051】
<2.塗布ヘッド31>
ここで、塗布ヘッド31についてより具体的に説明する。塗布ヘッド31は、液滴ジェット方式によって薬液を噴出する液滴ジェットヘッドである。この実施の形態においては、塗布ヘッド31は、駆動方式が積層ピエゾドロップオンデマンド方式のインクジェットヘッドであるとする。
【0052】
<2−1.構成>
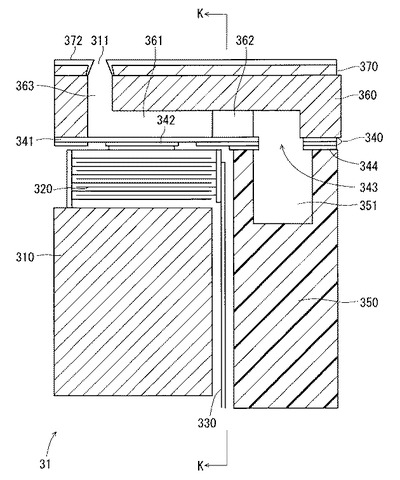
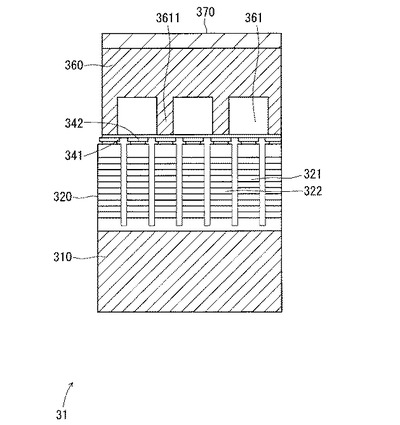
塗布ヘッド31の構成について、図4、図5を参照しながら説明する。図4は、塗布ヘッド31の側断面図である。また、図5は、塗布ヘッド31を図4の矢印K方向からみた断面図である。
【0053】
塗布ヘッド31は、ベース310と、ベース310に固定された積層圧電素子320とを備える。ベース310は、例えば、チタン酸バリウム系セラミックからなり、その上面には、積層圧電素子320が2列に配置されている。
【0054】
積層圧電素子320は、例えば、厚み10〜50μm/1層のチタン酸ジルコン酸鉛(PZT)の圧電層と、厚み数μm/1層の銀・パラジウム(AgPd)からなる内部電極層とを交互に積層することにより形成される。内部電極層は両端で外部電極に接続する。
【0055】
積層圧電素子320は、図5に示すように、ハーフカットのダイシング加工により櫛歯上に分割された部分を備え、各部分は、1つ毎に駆動部321、あるいは、支持部322(非駆動部)として使用される。外部電極の外側はハーフカットのダイシング加工で分割されるように、切り欠き等の加工により長さを制限しており、これらは複数の個別電極となる。他方はダイシングでは分割されずに導通しており共通電極となる。駆動部321の個別電極にはFPC330(図4参照)が半田接合されている。また、共通電極は積層圧電素子の端部に電極層を設けて回し込んでFPC330のGnd電極に接合している。FPC330にはドライバICが実装されており、これにより駆動部321へ印加される電圧(駆動電圧K)を制御している。
【0056】
積層圧電素子320には、振動板340が接合される。振動板340は、薄膜のダイヤフラム部341と、ダイヤフラム部341の中央部に形成された島状凸部(アイランド部)342とを備える。また、振動板340には、後述するフレーム350の共通液室351と連通する流入口343が形成される。凸部342は、積層圧電素子320の駆動部321と接合される。振動板340は、例えば、電鋳工法によるNiメッキ膜を2層重ねて形成される。また、ダイヤフラム部341の厚みは例えば、3μm、幅は例えば、35μm(片側)である。また、振動板340(具体的には、凸部342)と積層圧電素子320の駆動部321との結合、および、振動板340と後述するフレーム350との結合は、ギャップ材を含んだ接着層344をパターニングすることにより行うことができる。
【0057】
振動板340における、積層圧電素子320が接合された面と同じ側の面には、フレーム350が接合される。フレーム350の内部には、彫り込みにより共通液室351が形成される。共通液室351は、振動板340に形成された流入口343と連通する。フレーム350は、例えば、樹脂成形により得ることができる。
【0058】
振動板340における、積層圧電素子320、および、フレーム350が接合された面とは逆側の面には、流路板360が接合される。流路板360の内部には、彫り込みにより加圧液室361が形成される。加圧液室361内には、流体抵抗部362が配置される。また、流路板360の内部には、加圧液室361を後述するノズル311に連通させる連通口363が形成される。流路板360は、例えば、シリコン単結晶基板を用いて形成される。また、流体抵抗部362、加圧液室361となる彫り込み、および、連通口363となる貫通口は、エッチング工法でパターニングすることにより形成することができる。この場合、エッチングで残された部分が加圧液室361の隔壁3611となる。また、エッチング幅を狭くする部分を設け、これを流体抵抗部362とすることができる。
【0059】
流路板360における、振動板340と接合された面とは逆側の面には、ノズル板370が接合される。ノズル板370は、金属材料、例えば、電鋳工法によるNiメッキ膜等で形成したものであり、液滴を飛翔させるための微細な吐出口であるノズル311が多数形成される。ノズル311の内部形状(内側形状)は、ホーン形状(略円柱形状又は略円錘台形状でもよい)とされる。また、このノズル311の径は液滴の出口側の直径において、例えば20μm〜35μmとされる。また各列のノズルピッチは例えば、300dpiとされる。また、ノズル板370の吐出面(ノズル表面側)には、吐出される薬液に対して撥水性を有する表面処理を施した撥水層372が設けられる。撥水層372としては、例えば、フッ素樹脂、シリコン樹脂等の樹脂層、Ni/PTFE共析膜等の金属/樹脂複合膜などを用いることができる。
【0060】
<2−2.動作態様>
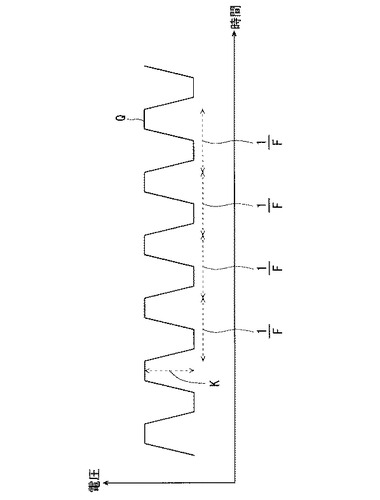
続いて、塗布ヘッド31の動作態様について、図4、図5に加え、図6を参照しながら説明する。図6は、制御信号Qの波形の一例を模式的に示す図である。
【0061】
塗布ヘッド31は、積層圧電素子320の駆動部321に制御信号Qが与えられることによって、液滴を吐出する。すなわち、塗布ヘッド31において、積層圧電素子320の駆動部321に制御信号Qが印加されると、駆動部321に積層方向の変位が生起し、振動板340を介して加圧液室361が加圧され、その内部の圧力が上昇する。これによって、ノズル311から1滴(1ドロップ)の液滴が吐出される。
【0062】
液滴の吐出が終了すると、これに伴って、加圧液室361内の圧力が低減し、薬液の流れの慣性と駆動パルスの放電過程によって加圧液室361内に負圧が発生する。すると、薬液タンク41から供給され、共通液室351に流入した薬液が、共通液室351から、流入口343、および、流体抵抗部362を経て、加圧液室361内に充填される。
【0063】
流体抵抗部362は、吐出後の残留圧力振動の減衰に効果が有る反面、表面張力による再充填(リフィル)に対して抵抗になる。流体抵抗部を適宜に選択することで、残留圧力の減衰とリフィル時間のバランスが取れ、次のインク滴吐出動作に移行するまでの時間(駆動周期)を短くできる。
【0064】
図6に例示されるように、制御信号Qは、一定周期で送出されるパルス信号である。ここで、ノズル311から単位時間に吐出される液滴(ドロップ)の個数は制御信号Qの周波数(以下「駆動周波数」という)Fと一致する。つまり、1個のノズル311から単位時間あたりに吐出される液滴の重さ(以下「単位吐出量」という)Rは、ノズル311から吐出される1ドロップの液滴の重さ(以下「ドロップマス」という)Mに駆動周波数Fを乗じた値となる(単位吐出量R=ドロップマスM×駆動周波数F)。
【0065】
なお、制御信号Qにおいて、パルス波における高電位と低電位との電位差(駆動電圧K)を大きくすると、ノズル311から吐出される際の液滴の速度が大きくなり、ドロップマスMも大きくなる。ここで、安定した塗布性能を実現するためには、ノズル311から吐出される際の液滴の速度が、約7(m/s)となっていることが好ましい。そこで、薬液塗布装置1においては、制御信号Qの駆動電圧Kは、ノズル311から吐出される液滴の速度が目標速度(例えば、7(m/s))となるような値に予め調整され、当該値に固定される。
【0066】
<3.貼付剤の製造処理>
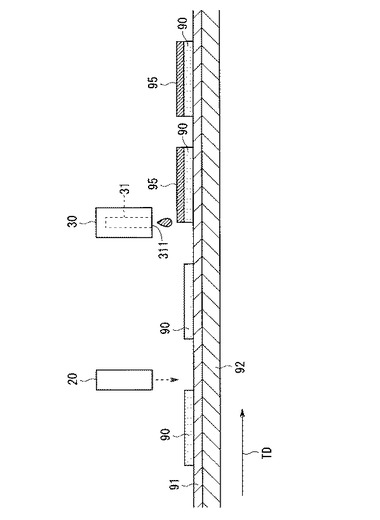
上記の構成を有する薬液塗布装置1において行われる貼付剤の製造処理の流れを、図7を参照しながら説明する。図7は、薬液塗布装置1における貼付剤の製造工程を説明するための図である。
【0067】
なお、以下の処理は、制御部60のCPU61が処理プログラムPを実行して薬液塗布装置1の各動作機構を制御することによって進行する。すなわち、制御部60には、薬液塗布装置1が備える各動作機構を制御することによって、塗布処理を実行させる「塗布処理制御部601」としての機能が実現される(図2参照)。
【0068】
塗布処理制御部601は、搬送機構10に、予め決定された搬送速度Vで支持体92を水平方向に沿って搬送開始させるとともに、シート供給機構(図示省略)に支持体92の上面に一定間隔で円板形状の基材シート90を供給開始させる。送りローラ11から送り出されて水平方向に搬送される支持体92の上面には粘着剤91の層が予め形成されており、供給された基材シート90は支持体92上に貼設される。つまり、支持体92上に貼設された基材シート90が、塗布ヘッド31に対して搬送速度Vで相対移動することになる。支持体92上に貼設されたそれぞれの基材シート90の位置は位置検出センサ20によって検出されて塗布処理制御部601に伝達される。
【0069】
塗布処理制御部601は、位置検出センサ20から取得した位置情報に基づいて塗布ヘッド31を制御して、ノズル311から、レシピにて指定された種類の薬液の液滴を基材シート90に向けて吐出させる。具体的には、塗布処理制御部601は、塗布ヘッド31の積層圧電素子320に、予め決定された駆動周波数Fの制御信号Qを与える。すると、塗布ヘッド31は、与えられた制御信号Qに従って、薬剤を含む薬液を微滴化して微小液滴を生成し、生成された液滴を、搬送機構10によって搬送される基材シート90に向けて吐出する。これにより、基材シート90に薬剤層95が形成されることになる。
【0070】
ただし、基材シート90にどのような塗布パターンで薬剤層を形成するかは例えばレシピにより指定されており、塗布処理制御部601は、レシピにて指定された塗布パターンが記述された2値の画像データを後述する一連の処理により取得する。そして、当該取得した画像データに基づいて塗布ヘッド31に設けられた全てのノズル311についてオン/オフのタイミングを制御する。すなわち、ある領域(画像データにおいて「1」とされている領域)に薬液を吹き付けるときには、その領域に対応するノズル311の積層圧電素子320に制御信号Qを印加して当該ノズル311から薬液の液滴を噴出させる。これによって、基材シート90に1ラインずつ薬液の塗布パターンが形成されていく。なお、塗布ヘッド31からの薬液の吐出タイミングは、例えば、エンコーダ12からのパルス信号に基づいて特定される。これによって、基材シート90に、レシピに指定された塗布パターンで薬剤層95が形成されることになる。
【0071】
薬剤層95が形成された基材シート90は乾燥ユニット50に搬送され、ここで薬液の乾燥処理を施される。さらにその後、基材シート90には剥離ライナーが貼り合わされ、支持体92が所定のサイズに裁断されて貼付剤とされる。以上の処理によって、貼付剤が製造される。
【0072】
<4.パラメータの決定>
上述したとおり、薬液塗布装置1の制御部60において実現される塗布処理制御部601は、塗布ヘッド31と基材シート90とを相対的に移動させつつ(具体的には、搬送機構10に基材シート90を搬送させつつ)、塗布ヘッド31から基材シート90に向けて薬液の液滴を吐出させることによって、塗布処理を実行させる。ところで、この塗布処理においては、基材シート90上に薬剤が求められる量だけ正確に塗布される必要がある。ここで、基材シート90に塗布される薬液の量は、各ノズル311から単位時間あたりに吐出される液滴の量(単位吐出量R)、塗布ヘッド31と基材シート90との相対移動速度(具体的には、基材シート90の搬送速度V))等から規定される。ただし、上述したとおり、単位吐出量Rは、塗布ヘッド31に印加される制御信号Qの周波数(駆動周波数F)とノズル311から吐出される液滴のドロップマスMとから規定される。したがって、基材シート90上に薬剤が求められる量だけ正確に塗布されるためには、塗布処理におけるパラメータ(具体的には、塗布処理において塗布ヘッド31に印加する制御信号Qの駆動周波数Fの値、および、塗布処理において搬送機構10に基材シート90を搬送させる搬送速度Vの値)が適切な値に決定されている必要がある。制御部60には、塗布処理に先立って、これらのパラメータを決定する「パラメータ決定部602」としての機能が実現される(図2参照)。パラメータ決定部602は、例えば、CPU61がROM62上のプログラムPを実行することにより実現される。
【0073】
<4−1.変数の関係>
パラメータ決定部602について具体的に説明する前に、パラメータの決定に関連する各種の変数の関係について説明する。上述したとおり、塗布ヘッド31は、基材シート90に対して搬送速度Vで相対移動しながら薬液の液滴を吐出して、基材シート90上に薬剤層95を形成する。ここで、基材シート90上において、単位面積にあたりに塗布される薬液の重さ(以下「塗布量」という)Aは、搬送速度Vと、ノズル311の単位吐出量Rとを用いて、下記(式1)で表される。ただし、(式1)中、「A」は塗布量、「R」は単位吐出量R、「V」は搬送速度Vである。また、「d」は、塗布ヘッド31におけるノズル311の配列ピッチ(以下「ノズルピッチd」という)であり、装置に固有の定数である。
【0074】
A=(1/d)×(R/V) ・・・(式1)
ここで、上述したとおり、単位吐出量Rは、ドロップマスMに制御信号Qの駆動周波数Fを乗じた値である(R=M×F)。
【0075】
ところで、従来においては、ドロップマスMは、塗布ヘッド31に印加される制御信号Qの駆動電圧Kのみに依存する値とみなされていた。したがって、駆動電圧Kが一定値に固定されている場合、駆動周波数Fが変化しても、ドロップマスMは一定のままとみなされていた。このようにみなした場合、塗布量Aは、「c」を定数として、下記(式2)で表されることになる。ただし、(式2)中、「F」は駆動周波数Fである。
【0076】
A=c×(F/V) ・・・(式2)
この場合、塗布量Aを例えばn倍にしたい場合、搬送速度Vを変化させずに駆動周波数Fをn倍に変更すればよいことになる。ところが、実際は、搬送速度Vを変化させずに駆動周波数Fをn倍すると、塗布量Aが元のn倍より僅かに多く(あるいは、僅かに少なく)なってしまう。この誤差の原因は、駆動周波数Fの変化に伴って、ドロップマスMが微小に変動するという事情にある。
【0077】
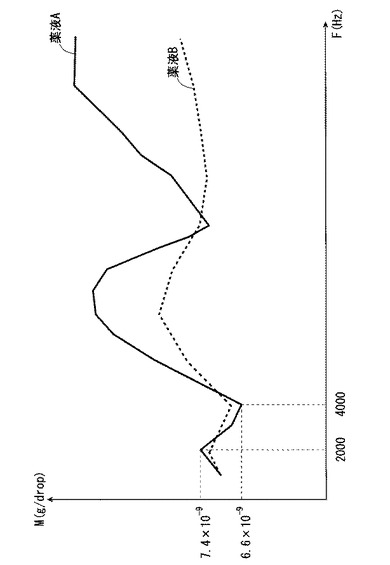
図8には、2種類の薬液A,Bのそれぞれについて、制御信号Qの駆動周波数Fの変化に伴うドロップマスMの変動の様子が模式的に示されている。ただし、ここでは、制御信号Qの駆動電圧Kは一定とされている。ここに示されるように、ドロップマスMは、駆動周波数Fの変化に応じて不規則に変動する。また、この変動の態様は、薬液の種類によって様々に異なったものとなる。また、この変動の態様は、塗布ヘッド31の特性によっても異なったものとなる。
【0078】
例えば、図8に例示される薬液Aにおいて、駆動周波数Fが「2000(Hz)」の場合のドロップマスMは、「7.40×10-9(g/drop)」である。この場合、単位吐出量Rは、「14.8×10-6(g/sec)」となる。一方、駆動周波数Fがその2倍の「4000(Hz)」となると、ドロップマスMが「6.60×10-9(g/drop)」に変化する。この場合、単位吐出量Rは、「26.4×10-6(g/sec)」となる。つまり、駆動周波数Fを2倍しても、単位吐出量Rは約1.8倍にしかならない。この場合、塗布量Aを2倍にしようとして、搬送速度Vを変化させずに駆動周波数Fを2倍にしても、実際は、元の塗布量の約1.8倍の塗布量しか得られていないことになってしまう。
【0079】
つまり、求められる量の薬液を正確に塗布するためには、駆動周波数Fの変化に伴うドロップマスMの変動を考慮して、塗布処理のパラメータ(搬送速度Vの値、駆動周波数Fの値)を決定する必要がある。
【0080】
<4−2.変動情報>
制御部60の備える記憶装置(例えば固定ディスク64)には、駆動周波数Fの変化に伴うドロップマスMの変動を示す情報(変動情報)が保持されており、パラメータ決定部602は、この変動情報を用いて塗布処理のパラメータを決定する。ただし、上述したとおり、駆動周波数Fの変化に伴うドロップマスMの変動の態様は、薬液の種類、および、塗布ヘッド31の特性によって様々に異なったものとなる。そこで、制御部60には、自装置において使用可能性のある各種の薬液のそれぞれについて、当該薬液を自装置が備える塗布ヘッド31から吐出させた場合の、駆動周波数Fの変化に伴うドロップマスMの変動情報が保持されている。
【0081】
なお、変動情報は、装置の出荷時に固定ディスク64に格納されてもよい。また、記録媒体RMから読取装置68によって読み出されて固定ディスク64に格納されてもよい。また、オペレータが入力装置67を介して入力した情報を制御部60が受け付けて、固定ディスク64に格納してもよい。
【0082】
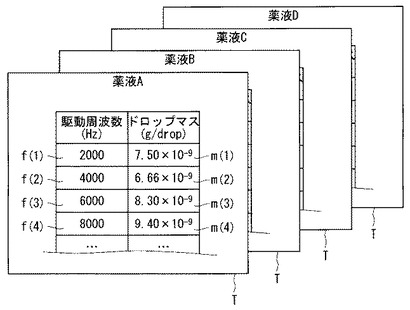
図9には、固定ディスク64に保持される変動情報が模式的に示されている。この実施の形態においては、変動情報はテーブル(変動情報テーブルT)の形で保持される。
【0083】
固定ディスク64には、1以上の変動情報テーブルTが格納されており、各変動情報テーブルTには、互いに異なる種類の薬液の変動情報が記述されている。なお、図9においては、4個の変動情報テーブルT(すなわち、4種類の薬液についての変動情報テーブルT)が保持される様子が示されているが、さらに多数の(あるいは、小数の)変動情報テーブルTが保持されてもよい。
【0084】
各変動情報テーブルTにおいては、駆動周波数の複数の代表値f(i)(i=1,2,・・・)と、複数の代表値f(i)(i=1,2,・・・)のそれぞれと対応するドロップマスMの値m(i)(i=1,2,・・・)とが、対応付けられて記憶される。ただし、代表値f(i)と対応するドロップマスMの値m(i)とは、駆動周波数Fを当該代表値f(i)とした制御信号Qを積層圧電素子320に与えた場合に、ノズル311から吐出される液滴のドロップマスMの値である。例えば、図9に例示される変動情報テーブルTによると、薬液Aにおいて、駆動周波数Fを代表値f(1)=2000(Hz)とした制御信号Qを積層圧電素子320に与えた場合に、ノズル311から吐出される液滴のドロップマスMの値m(1)は、「7.50×10-9(g/drop)」であることがわかる。
【0085】
なお、各変動情報テーブルTにおいてはさらに細かい刻み幅(あるいは、さらに粗い刻み幅)で駆動周波数Fの代表値f(i)が保持されてもよい。また、刻み幅は一定でなくともよい。また、さらに広い数値範囲(あるいは、さらに狭い数値範囲)で代表値f(i)が保持されてもよい。後に明らかになるように、各テーブルTに保持される代表値f(i)の個数が多くなるほど、オペレータが選択可能なパラメータ候補の数が多くなる。
【0086】
<4−3.パラメータの決定>
パラメータ決定部602は、塗布処理の実行に先立って、固定ディスク64に保持された変動情報テーブルTを用いて、当該塗布処理のパラメータ(駆動周波数Fの値、搬送速度Vの値)を決定する。以下において、パラメータ決定部602がパラメータを決定する処理の流れについて具体的に説明する。なお、以下においては、パラメータを決定する処理の態様を2種類説明する。薬液塗布装置1においては、以下に説明する2つの態様のうちのどちらの態様でパラメータが決定されてもよい。また、オペレータがどちらの態様でパラメータを決定するかを選択できる構成としてもよい。
【0087】
<4−3−1.第1の態様>
第1の態様に係る処理の流れについて、図10を参照しながら具体的に説明する。図10は、当該処理の流れを示す図である。
【0088】
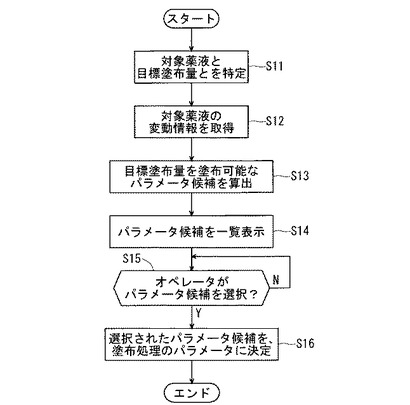
パラメータ決定部602は、まず、レシピに基づいて(あるいは、オペレータからの入力に基づいて)、塗布処理において基材シート90に塗布すべき薬液の種類(対象薬液)、および、基材シート90に塗布すべき薬液の量(目標塗布量)Arを特定する(ステップS11)。
【0089】
続いて、パラメータ決定部602は、対象薬液の変動情報を取得する(ステップS12)。具体的には、対象薬液の変動情報を記述した変動情報テーブル(対象変動情報テーブル)Tを、固定ディスク64から読み出す。
【0090】
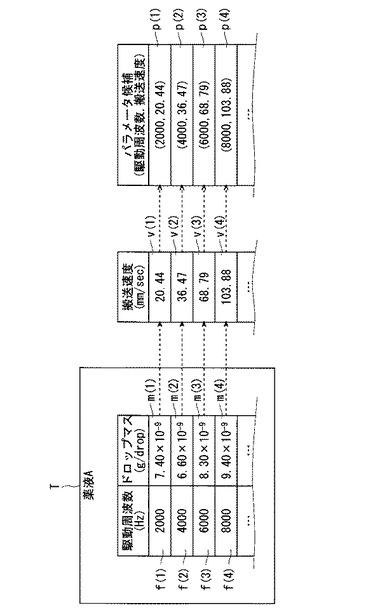
続いて、パラメータ決定部602は、対象変動情報テーブルTを用いて、基材シート90に目標塗布量Arの薬液を塗布可能な、駆動周波数Fの値と搬送速度Vの値との組み合わせを算出し、これをパラメータ候補として取得する(ステップS13)。
【0091】
ステップS13の処理について、図11を参照しながら具体的に説明する。図11は、当該処理を説明するための図である。
【0092】
パラメータ決定部602は、対象変動情報テーブルTに保持されている複数の駆動周波数の代表値f(i)(i=1,2,・・・)のうちのいずれかを読み出してこれを対象代表値f(i)とし、対象代表値f(i)と対になる搬送速度の値(以下「搬送速度v(i)」と示す)を算出する。「対象代表値f(i)と対になる搬送速度v(i)」とは、制御信号Qの駆動周波数Fを対象代表値f(i)として塗布処理を行う場合に、目標塗布量Arの薬液を塗布可能な搬送速度Vの値である。すなわち、駆動周波数Fが対象代表値f(i)であるような制御信号Qを与えて塗布ヘッド31から液滴を吐出させた場合に、基材シート90に目標塗布量Arの薬液を塗布するために必要な搬送速度Vの値である。
【0093】
対象代表値f(i)と対になる搬送速度v(i)を算出する態様を具体的に説明する。まず、パラメータ決定部602は、対象変動情報テーブルTを参照して、駆動周波数Fが対象代表値f(i)であるような制御信号Qを与えて塗布ヘッド31から液滴を吐出させた場合の単位吐出量r(i)を算出する。ただし、単位吐出量r(i)は、対象代表値f(i)に、これと対応するドロップマスMの値m(i)(すなわち、対象変動情報テーブルTにおいて対象代表値f(i)と対応付けられているドロップマスMの値m(i))を乗じた値により与えられる。
【0094】
続いて、パラメータ決定部602は、算出された単位吐出量r(i)と、上記(式1)とに基づいて、目標塗布量Arを達成可能な搬送速度v(i)を算出する。すなわち、目標塗布量Arを達成可能な搬送速度v(i)は、下記(式3)で与えられる。
【0095】
v(i)=(1/d)×(r(i)/Ar) ・・・(式3)
パラメータ決定部602は、算出された搬送速度v(i)を、対象代表値f(i)と対にして、1つのパラメータ候補p(i)として取得する。パラメータ候補p(i)は、目標塗布量Arの薬液を塗布可能なパラメータの組み合わせとなっている。
【0096】
例えば、対象薬液が「薬液A」であり、目標塗布量Arが「8.55×10-6(g/mm2)」であるとする。また、ノズルピッチdが「0.08467(mm)」であるとする。この場合、代表値f(2)=4000(Hz)と対になる搬送速度v(2)は次のように算出される。すなわち、駆動周波数Fが対象代表値f(2)=4000(Hz)であるような制御信号Qを与えて塗布ヘッド31から液滴を吐出させた場合の単位吐出量r(2)は、対象変動情報テーブルTを参照することにより「26.4×10-9(g/sec)」と算出される(4000(drop/sec)×6.60×10-6(g/drop)=26.4×10-9(g/sec))。そして、算出された単位吐出量r(2)に基づいて、目標塗布量Arを達成可能な搬送速度v(2)は、「36.47(mm/sec)」と算出される(v(i)=(1/0.08467(mm))×(26.4×10-9(g/sec)/8.55×10-6(g/mm2)))。パラメータ決定部602は、算出された搬送速度v(2)の値「36.47(mm/sec)」を、対象代表値f(2)の値「4000(Hz)」と対にして、1つのパラメータ候補p(2)=(4000(Hz),36.47(mm/sec))として取得する。パラメータ候補p(2)は、目標塗布量Ar=8.55×10-6(g/mm2)の薬液を塗布可能なパラメータの組み合わせとなっている。
【0097】
パラメータ決定部602は、対象変動情報テーブルTに保持されている複数の代表値f(i)(i=1,2,・・・)の全てについて、各代表値f(i)と対になる搬送速度v(i)を算出して、パラメータ候補p(i)を取得する。つまり、対象変動情報テーブルTにおいて保持されている複数の代表値f(i)(i=1,2,・・・)と同数個のパラメータ候補p(i)(i=1,2,・・・)が取得されることになる。
【0098】
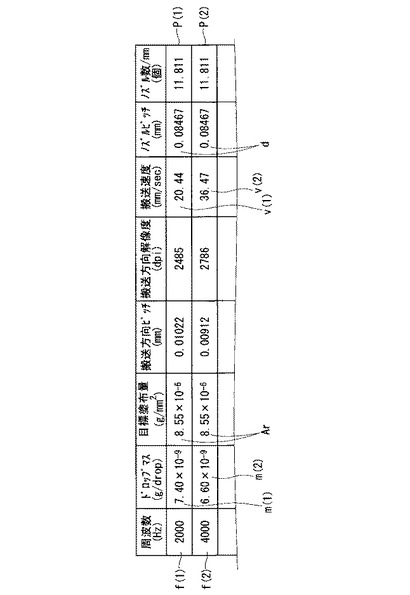
再び図10を参照する。ステップS13の処理が終了すると、続いて、パラメータ決定部602は、ステップS13で取得された複数のパラメータ候補p(i)(i=1,2,・・・)を表示装置66に一覧表示させて(ステップS14)、オペレータにいずれかのパラメータ候補を選択させる。図12には、この一覧表示画面の構成例が示されている。ここでは、複数のパラメータ候補p(i)(i=1,2,・・・)のそれぞれについて、各パラメータ候補p(i)で組み合わされている駆動周波数(すなわち、いずれかの代表値f(i))と搬送速度v(i)とが対になって表示される。
【0099】
なお、一覧表示画面には、駆動周波数f(i)、および、搬送速度v(i)に加え、当該駆動周波数f(i)に対応するドロップマスm(i)、目標塗布量Ar、搬送方向ピッチ(基材シート90の搬送方向(ノズル311の配列方向と直交する方向)について、塗布される液滴のピッチであり、搬送速度v(i)を周波数f(i)で割った値により得られる。)、搬送方向解像度(基材シート90の搬送方向について、1インチあたりに塗布される液滴の個数であり、25.4(mm/inch)を搬送方向ピッチで割った値により得られる。)、ノズルピッチd、ノズル数(単位長さあたりのノズル311の個数)等を表示することも好ましい。これらを表示しておけば、オペレータは、例えば、搬送方向に沿う解像度等も参考にしながら、好ましいパラメータを選択することができる。
【0100】
再び図10を参照する。オペレータが、入力装置67を介して、一覧表示されたパラメータ候補p(i)(i=1,2,・・・)のいずれかを選択すると(ステップS15でYES)、パラメータ決定部602は当該選択操作を受け付けて、選択されたパラメータ候補p(i)において対にされている駆動周波数f(i)と搬送速度v(i)とを、塗布処理に係るパラメータに決定する(ステップS16)。すなわち、選択されたパラメータ候補p(i)の搬送速度v(i)を、塗布処理において搬送機構10を駆動する際の搬送速度Vの値に決定する。また、選択されたパラメータ候補p(i)の駆動周波数f(i)を、塗布処理において塗布ヘッド31を制御する制御信号Qの駆動周波数Fの値に決定する。
【0101】
<4−3−2.第2の態様>
第2の態様に係る処理の流れについて、図13を参照しながら具体的に説明する。図13は、当該処理の流れを示す図である。
【0102】
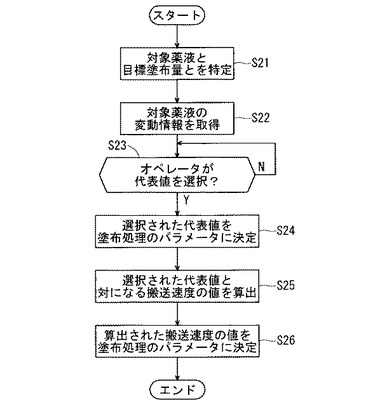
パラメータ決定部602は、まず、レシピに基づいて(あるいは、オペレータからの入力に基づいて)、対象薬液、および、目標塗布量Arを特定する(ステップS21)。
【0103】
続いて、パラメータ決定部602は、対象薬液の変動情報を取得する(ステップS22)。具体的には、対象薬液の変動情報を記述した変動情報テーブル(対象変動情報テーブル)Tを、固定ディスク64から読み出す。
【0104】
続いて、パラメータ決定部602は、対象変動情報テーブルTに保持されている複数の駆動周波数の代表値f(i)(i=1,2,・・・)を表示装置66に一覧表示させて、オペレータにいずれかの代表値f(i)を選択させる(ステップS23)。
【0105】
オペレータが、入力装置67を介して、一覧表示された複数の代表値f(i)(i=1,2,・・・)のいずれかを選択すると(ステップS23でYES)、パラメータ決定部602は当該選択操作を受け付けて、選択された駆動周波数の代表値f(i)を、塗布処理に係るパラメータに決定する(ステップS24)。すなわち、選択された代表値f(i)を、塗布処理において塗布ヘッド31を制御する制御信号Qの駆動周波数Fの値に決定する。
【0106】
続いて、パラメータ決定部602は、選択された代表値f(i)と対になる搬送速度Vの値(搬送速度v(i))を算出する(ステップS25)。すなわち、制御信号Qの駆動周波数Fを選択された代表値f(i)として塗布処理を行う場合に、目標塗布量Arの薬液を塗布可能な搬送速度Vの値を算出する。代表値f(i)と対になる搬送速度v(i)を算出する態様は、上述した通りである。
【0107】
選択された代表値f(i)と対になる搬送速度v(i)が算出されると、パラメータ決定部602は、当該算出された搬送速度v(i)を、塗布処理に係るパラメータに決定する(ステップS26)。すなわち、算出された搬送速度v(i)を、塗布処理において搬送機構10を駆動する際の搬送速度Vの値に決定する。
【0108】
<4−4.パラメータの再決定>
パラメータ決定部602が塗布処理のパラメータ(駆動周波数Fの値、搬送速度Vの値)を決定すると、塗布処理制御部601が薬液塗布装置1の各部を制御することにより、決定されたパラメータで塗布処理が開始される。塗布処理制御部601の制御下で行われる塗布処理の具体的な態様は上述したとおりである。
【0109】
ところで、パラメータ決定部602は、塗布処理が実行されている間にオペレータから目標塗布量Arの変更指示(あるいは、駆動周波数Fの変更指示)を受け付けると、パラメータを再決定する。以下において、パラメータ決定部602がパラメータを再決定する処理の流れについて具体的に説明する。
【0110】
<4−4−1.目標塗布量の変更が指示された場合>
オペレータが、目標塗布量Arの変更を指示した場合に、パラメータ決定部602がパラメータを再決定する処理の流れについて、図14を参照しながら具体的に説明する。図14は、当該処理の流れを示す図である。
【0111】
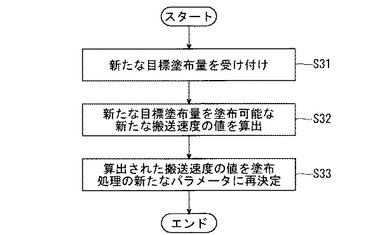
オペレータが入力装置67を介して新たな目標塗布量(以下「新たな目標塗布量Ar’」と示す)を入力した場合、パラメータ決定部602は、当該入力を受け付ける(ステップS31)。
【0112】
続いて、パラメータ決定部602は、駆動周波数Fを現状の設定値のままとしつつ(すなわち、制御信号Qの駆動周波数Fを変更せずに)、基材シート90に新たな目標塗布量Ar’の薬液を塗布可能な搬送速度Vの値(以下「新たな搬送速度v’」と示す)を算出する(ステップS32)。制御信号Qの駆動周波数Fが変更されない場合、ノズル311の単位吐出量Rは変化しない。したがって、上記(式1)に基づいて、新たな目標塗布量Ar’の薬液を塗布可能な新たな搬送速度v’は、下記(式4)で与えられることになる。ただし、(式4)中、「v」は現在設定中の搬送速度Vを表す。また、「Ar」は変更前の目標塗布量Ar、「Ar’」は新たな目標塗布量Ar’である。
【0113】
v’=(Ar/Ar’)×v ・・・(式4)
すなわち、新たな目標塗布量Ar’が元の目標塗布量Arのx倍であったとすれば、現在設定中の搬送速度Vを(1/x)倍した値を、新たな搬送速度v’として取得することになる。
【0114】
新たな搬送速度v’が算出されると、パラメータ決定部602は、当該算出された新たな搬送速度v’を、塗布処理に係る新たなパラメータに再決定する(ステップS33)。すなわち、塗布処理において搬送機構10を駆動する際の搬送速度Vを、算出された新たな搬送速度v’に再決定する。
【0115】
パラメータ決定部602が塗布処理のパラメータ(ここでは、搬送速度Vの値)を再決定すると、塗布処理制御部601が薬液塗布装置1の各部を制御することにより、決定された新たなパラメータの下で塗布処理を実行させる。すなわち、塗布処理制御部601は、積層圧電素子320に与える制御信号Qの駆動周波数Fを変化させずに(すなわち、現状の設定値のままの駆動周波数Fの制御信号Qを積層圧電素子320に与えて)ノズル311から基材シート90に向けて薬液の液滴を吐出させつつ、搬送機構10に基材シート90を搬送させる搬送速度Vを再決定された新たな搬送速度v’に変更して、塗布処理を実行させる。搬送速度Vの変更後は、塗布処理において基材シート90に塗布される薬液の量が、新たな目標塗布量Ar’に変更されることになる。
【0116】
<4−4−2.駆動周波数の変更が指示された場合>
オペレータが、駆動周波数Fの変更を指示した場合に、パラメータ決定部602がパラメータを再決定する処理の流れについて、図15を参照しながら具体的に説明する。図15は、当該処理の流れを示す図である。
【0117】
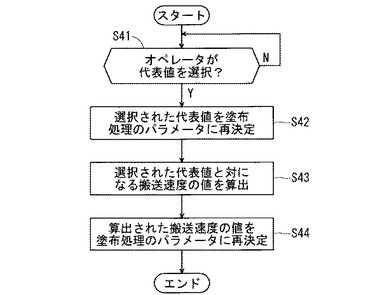
オペレータが駆動周波数Fの変更指示を入力した場合、パラメータ決定部602は、当該指示に応じて、対象変動情報テーブルTに保持されている複数の駆動周波数の代表値f(i)(i=1,2,・・・)を表示装置66に一覧表示させて、オペレータにいずれかの代表値f(i)を選択させる(ステップS41)。
【0118】
オペレータが、入力装置67を介して、一覧表示された複数の代表値f(i)(i=1,2,・・・)のいずれかを選択すると(ステップS41でYES)、パラメータ決定部602は当該選択操作を受け付けて、選択された駆動周波数の代表値f(i)を、塗布処理に係る新たなパラメータに再決定する(ステップS42)。すなわち、塗布処理において塗布ヘッド31を制御する制御信号Qの駆動周波数Fを、選択された代表値f(i)に再決定更する。
【0119】
続いて、パラメータ決定部602は、選択された代表値f(i)と対になる搬送速度Vの値(搬送速度v(i))を算出する(ステップS43)。すなわち、制御信号Qの駆動周波数Fを選択された代表値f(i)として塗布処理を行う場合に、目標塗布量Arの薬液を塗布可能な搬送速度Vの値を算出する。代表値f(i)と対になる搬送速度v(i)を算出する態様は、上述した通りである。
【0120】
選択された代表値f(i)と対になる搬送速度v(i)が算出されると、パラメータ決定部602は、当該算出された搬送速度v(i)を、塗布処理に係る新たなパラメータに再決定する(ステップS44)。すなわち、塗布処理において搬送機構10を駆動する際の搬送速度Vを、算出された新たな搬送速度v(i)に再決定する。
【0121】
パラメータ決定部602が塗布処理のパラメータ(ここでは、駆動周波数Fと搬送速度Vの各値)を再決定すると、塗布処理制御部601が薬液塗布装置1の各部を制御することにより、決定された新たなパラメータの下で塗布処理を実行させる。すなわち、塗布処理制御部601は、積層圧電素子320に与える制御信号Qの駆動周波数Fを再決定された新たな代表値f(i)に変更するとともに、搬送機構10に基材シート90を搬送させる搬送速度Vを再決定された新たな搬送速度v(i)に変更して、塗布処理を実行させる。搬送速度Vおよび駆動周波数Fの変更後においても、塗布処理において基材シート90に塗布される薬液の量は、元の目標塗布量Arのまま維持されることになる。
【0122】
<5.効果>
上記の実施の形態に係る薬液塗布装置1によると、パラメータ決定部602が、塗布処理において、塗布ヘッド31と基材シート90とを相対的に移動させる速度(具体的には、基材シート90を移動させる搬送速度V)と、積層圧電素子320に与える制御信号Qの駆動周波数Fとを、変動情報(すなわち、制御信号Qの駆動周波数Fの変化に伴うドロップマスMの変動を記述する情報)を加味して決定するので、基材シート90へ薬液を求められる量だけ正確に塗布することができる。
【0123】
また、パラメータを決定する上記第1の態様によると、複数のパラメータ候補p(i)(i=1,2,・・・)のうち、オペレータが選択したパラメータ候補p(i)を塗布処理のパラメータとして採用する。したがって、オペレータが所望するとおりの態様で、塗布処理を行うことができる。例えば、オペレータは、定められた時間内に塗布処理を完了させたい場合は、それを実現可能な搬送速度Vの値を有するパラメータ候補p(i)を選択すればよい。また例えば、オペレータは、定められた解像度で塗布処理を実行させたい場合は、それを実現可能な搬送速度Vと駆動周波数Fとの組み合わせを有するパラメータ候補p(i)を選択すればよい。
【0124】
また、パラメータを決定する上記第2の態様によると、複数の代表値f(i)(i=1,2,・・・)のうち、オペレータが選択した値を塗布処理における制御信号Qの駆動周波数Fとして採用するので、オペレータが所望するとおりの態様で塗布処理を行うことができる。
【0125】
また、パラメータ決定部602は、オペレータが目標塗布量Arの変更を指示した場合に、塗布処理において積層圧電素子320に与える制御信号Qの駆動周波数Fを変化させずに、塗布ヘッド31と基材シート90とを相対的に移動させる速度(具体的には、搬送速度V)を変更することによって、塗布量を変更する。この構成によると、ノズル311の単位吐出量Rが変化しないので、簡易かつ正確に、塗布される薬液の量を新たな塗布量に変更することができる。
【0126】
<6.変動情報の保持態様に係る変形例>
上記の実施の形態においては、変動情報は、テーブルの形で保持されていたが、変動情報は必ずしもテーブルの形で保持されなくともよい。
【0127】
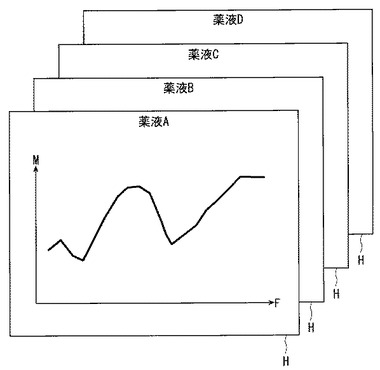
図16には、固定ディスク64に保持される変動情報の別の構成例が模式的に示されている。ここでは、変動情報は関数(変動情報関数H)の形で保持される。
【0128】
固定ディスク64には、1以上の変動情報関数Hが記憶されており、各変動情報関数Hには、互いに異なる種類の薬液の変動情報を表している。なお、図16においては、4個の変動情報関数H(すなわち、4種類の薬液についての変動情報関数H)が保持される様子が示されているが、さらに多数の(あるいは、小数の)変動情報関数Hが保持されてもよい。
【0129】
各変動情報関数Hは、ノズル311に設けられた積層圧電素子320に与える制御信号Qの駆動周波数Fの変化に伴う、ノズル311から吐出されるドロップマスMの変動を表している。なお、変動情報関数Hは、当該変動を近似的に表すものであってもよい。
【0130】
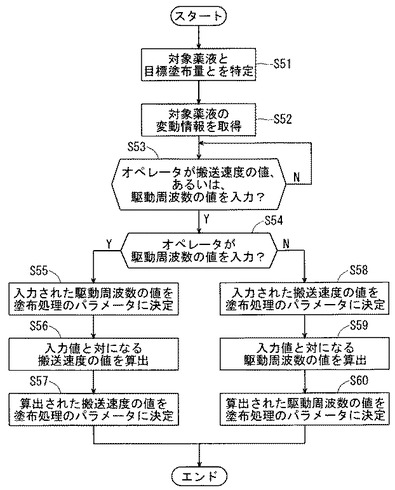
変動情報が変動情報関数Hの形で保持されている場合、パラメータ決定部602は、固定ディスク64に保持された変動情報関数Hを用いて、塗布処理のパラメータ(駆動周波数Fの値、搬送速度Vの値)を決定する。当該処理の流れについて、図17を参照しながら具体的に説明する。図17は、当該処理の流れを示す図である。
【0131】
パラメータ決定部602は、まず、レシピに基づいて(あるいは、オペレータからの入力に基づいて)、対象薬液、および、目標塗布量Arを特定する(ステップS51)。
【0132】
続いて、パラメータ決定部602は、対象薬液の変動情報を取得する(ステップS52)。具体的には、対象薬液の変動情報を記述した変動情報関数(対象変動情報関数)Hを、固定ディスク64から読み出す。
【0133】
続いて、パラメータ決定部602は、オペレータから、搬送速度Vの値、駆動周波数Fの値のうちのいずれか一方の入力を受け付ける(ステップS53)。オペレータは、搬送速度Vの値、あるいは、駆動周波数Fの値として、任意の数値を指定することができる。
【0134】
いま、ステップS53において、オペレータが、入力装置67を介して、駆動周波数Fの値を入力したとする(ステップS54でYES)。この場合、パラメータ決定部602は、当該入力操作を受け付けて、入力された値(以下「入力値f(j)」と示す)を、塗布処理に係るパラメータに決定する(ステップS55)。すなわち、入力値f(j)を、塗布処理において塗布ヘッド31を制御する制御信号Qの駆動周波数Fの値に決定する。
【0135】
続いて、パラメータ決定部602は、入力値f(j)と対になる搬送速度Vの値(以下「搬送速度v(j)」と示す)を算出する(ステップS56)。すなわち、制御信号Qの駆動周波数Fを入力値f(j)として塗布処理を行う場合に、目標塗布量Arの薬液を塗布可能な搬送速度Vの値を算出する。
【0136】
入力値f(j)と対になる搬送速度v(j)を算出する態様を具体的に説明する。まず、パラメータ決定部602は、対象変動情報関数Hを参照して、駆動周波数Fが入力値f(j)であるような制御信号Qを与えて塗布ヘッド31から液滴を吐出させた場合の単位吐出量r(j)を算出する。ただし、単位吐出量r(j)は、入力値f(j)に、これと対応するドロップマスMの値m(j)(すなわち、対象変動情報関数Hにおいて入力値f(j)に対して与えられるドロップマスMの値m(j))を乗じた値により与えられる。
【0137】
続いて、パラメータ決定部602は、算出された単位吐出量r(j)と、上記(式1)とに基づいて、目標塗布量Arを達成可能な搬送速度v(j)を算出する。すなわち、目標塗布量Arを達成可能な搬送速度v(j)は、下記(式5)で与えられる。
【0138】
v(j)=(1/d)×(r(j)/Ar) ・・・(式5)
入力値f(j)と対になる搬送速度v(j)が算出されると、パラメータ決定部602は、当該算出された搬送速度v(j)を、塗布処理に係るパラメータに決定する(ステップS57)。すなわち、算出された搬送速度v(j)を、塗布処理において搬送機構10を駆動する際の搬送速度Vの値に決定する。これにより、塗布処理に係るパラメータ(搬送速度Vの値、駆動周波数Fの値)がそれぞれ決定されることになる。
【0139】
一方、ステップS53において、オペレータが、入力装置67を介して、搬送速度Vの値を入力したとする(ステップS54でNO)。この場合、パラメータ決定部602は、当該入力操作を受け付けて、入力された値(以下「入力値v(j)」と示す)を、塗布処理に係るパラメータに決定する(ステップS58)。すなわち、入力値v(j)を、塗布処理において搬送機構10を駆動する際の搬送速度Vの値に決定する。
【0140】
続いて、パラメータ決定部602は、入力値v(j)と対になる駆動周波数Fの値(以下「駆動周波数f(j)」と示す)を算出する(ステップS59)。ここで、「入力値v(j)と対になる駆動周波数f(j)」とは、搬送速度Vを入力値v(j)として塗布処理を行う場合に、目標塗布量Arの薬液を塗布可能な駆動周波数Fの値である。
【0141】
入力値v(j)と対になる駆動周波数f(j)を算出する態様を具体的に説明する。まず、パラメータ決定部602は、上記(式1)に基づいて、搬送速度Vが入力値v(j)である場合に、目標塗布量Arを達成するために必要な単位吐出量r(j)を算出する。すなわち、目標塗布量Arを達成可能するために必要な単位吐出量r(j)は、下記(式6)で与えられる。
【0142】
r(j)=d×Ar×v(j) ・・・(式6)
必要な単位吐出量r(j)が算出されると、パラメータ決定部602は、対象変動情報関数Hを参照して、算出された単位吐出量r(j)を与える駆動周波数Fの値を特定する。すなわち、その駆動周波数Fの値に、これと対応するドロップマスMの値(すなわち、対象変動情報関数Hにおいてその駆動周波数Fの値に対して与えられるドロップマスMの値)を乗じた値が、単位吐出量r(j)となるような駆動周波数の値を特定する。そして、特定された駆動周波数Fの値を、入力値v(j)と対になる駆動周波数f(j)として取得する。
【0143】
入力値v(j)と対になる駆動周波数f(j)が取得されると、パラメータ決定部602は、当該取得された駆動周波数f(j)を、塗布処理に係るパラメータに決定する(ステップS60)。すなわち、取得された駆動周波数fを、塗布処理において塗布ヘッド31を制御する制御信号Qの駆動周波数Fの値に決定する。これにより、塗布処理に係るパラメータ(搬送速度Vの値、駆動周波数Fの値)がそれぞれ決定されることになる。
【0144】
なお、ここでも、パラメータ決定部602が塗布処理のパラメータ(駆動周波数Fの値、搬送速度Vの値)を決定すると、塗布処理制御部601が薬液塗布装置1の各部を制御することにより、決定されたパラメータで塗布処理が開始される。また、パラメータ決定部602は、塗布処理が実行されている間にオペレータから、駆動周波数Fの変更指示、あるいは、搬送速度Vの変更指示を受け付けると、上記のステップS53〜ステップS60を実行することによりパラメータを再決定する。
【0145】
上記の態様によると、オペレータが入力した値を塗布処理における制御信号Qの駆動周波数Fとして採用するので、オペレータが所望するとおりの態様で塗布処理を行うことができる。また、オペレータが入力した値を、塗布処理において塗布ヘッド31と基材シート90とを相対的に移動させる相対移動速度(具体的には、搬送速度V)として採用するので、オペレータが所望するとおりの態様で塗布処理を行うことができる。
【0146】
<7.その他の変形例>
上記の実施の形態に係る薬液塗布装置1の各構成要素は、上記に説明した態様に限らない。例えば、上記の各実施の形態においては、制御部60はCPU61を備える構成としたが、これを例えばFPGAに代えてもよい。
【0147】
また、上記の実施の形態においては、塗布ヘッド31において液滴を吐出する方式として、積層ピエゾドロップオンデマンド方式のインクジェットヘッドを用いていたが、液滴を吐出する方式はこれに限定されるものではなく、制御信号Qを印加することにより微小液滴を生成して噴出するものであればよい。
【0148】
また、上記の実施の形態に係る薬液塗布装置1においては、基材シート90を塗布ヘッド31に対して相対的に移動させることによって、基材シート90と塗布ヘッド31とを相対的に移動させていたが、基材シート90を動かさずに、基材シート90に対して塗布ヘッド31を相対的に移動させることによって、基材シート90と塗布ヘッド31とを相対的に移動させてもよい。
【0149】
また、上記の実施の形態に係る薬液塗布装置1において、塗布ユニット30が、塗布ヘッド31を複数個備えてもよい。1個の塗布ユニット30に複数個の塗布ヘッド31を設けることによって、解像度を高めることができる。例えば、300dpiの塗布ヘッド31をそのノズルが互い違いになるように配置すれば、600dpiの解像度を実現することができる。また、薬液塗布装置1において、1以上の塗布ヘッド31を備える塗布ユニット30を複数個設けてもよい。
【0150】
また、上記の実施の形態に係る薬液塗布装置1は、粘着剤91が積層された支持体92上に供給された基材シート90上に、薬液を塗布する構成であったが、粘着剤91に直接薬液を塗布して、粘着剤91に薬液を含浸させる構成であってもよい。この場合、粘着剤(粘着層)91は、ゴム系粘着剤、ビニル系粘着剤、アクリル系粘着剤等とする。
【符号の説明】
【0151】
1 薬液塗布装置
10 搬送機構
31 塗布ヘッド
311 ノズル
320 積層圧電素子
60 制御部
601 塗布処理制御部
602 パラメータ決定部
90 基材シート
95 薬剤層
【技術分野】
【0001】
この発明は、塗布対象物とする媒体へ薬液を塗布する技術に関する。
【背景技術】
【0002】
皮膚等に貼着して使用される貼付剤は、例えば、不織布や樹脂シート等の媒体上に薬剤を塗布することにより製造される。貼付剤の製造は、例えば、バーコーター、ダイコーター等を用いて帯状の媒体に薬剤を展延塗布(いわゆるベタ塗り)し、そこから必要な部分を打ち抜くとともに、不要な部分を除去することにより行われていた(例えば、特許文献1〜3参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2009−108006号公報
【特許文献2】特開2006−223611号公報
【特許文献3】特開平3−85160号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
従来の貼付剤の製造技術では、不要部分に塗布されていた高価な薬剤も除去されることになるため、薬剤の使用効率が悪く、貼付剤の製造コストがその分高くなるという問題があった。
【0005】
そこで、媒体への塗布手段として液滴ジェット方式を用いて、必要部分だけ塗布液を塗布可能とすることができれば、不要部分に塗布される薬剤の量が大幅に低減され、薬剤の製造コストを低減することが可能となる。
【0006】
ところで、液滴ジェット方式を貼付剤の製造用途に用いる場合(すなわち、液滴ジェット方式を用いて媒体へ薬液を塗布する場合)、液滴ジェット方式を印刷用途に用いる場合(すなわち、液滴ジェット方式を用いて紙などの媒体へインクを塗布して画像形成する場合)よりもはるかに高精度に、塗布される液滴の量を制御することが必要となってくる。
【0007】
すなわち、液滴ジェット方式が印刷用途で用いられる場合、液滴ジェットヘッドから吐出される液滴量が微小に(例えば、10%〜20%程度)変動し、これによって、媒体上に塗布されるインクの量が目標量よりも僅かに多く(あるいは、僅かに少なく)なっても、ほとんど問題にはならない。というのも、このような微小な変動が印刷物の濃度に与える影響は目視でわからない程度のものであり、印刷品質に与える影響は無視することができるからである。
【0008】
一方、液滴ジェット方式が貼付剤の製造用途で用いられる場合、このような誤差は許されない。媒体上に薬液が目標量だけ正確に塗布されないと、貼付剤の品質(たとえば、貼付剤の効能)に深刻な影響が出てしまうからである。
【0009】
この発明は、上記の課題に鑑みてなされたものであり、液滴ジェット方式を用いて媒体へ薬液を塗布するにあたって、薬液を求められる量だけ正確に塗布可能とする技術を提供することを目的とする。
【課題を解決するための手段】
【0010】
請求項1に記載の発明は、駆動素子が設けられたノズルを備える塗布ヘッドから、前記塗布ヘッドに対して相対的に移動する媒体に向けて薬剤を含む薬液の液滴を吐出させることにより、前記媒体に前記薬液を塗布する薬液塗布方法であって、a)前記駆動素子に与える制御信号の周波数の変化に伴う、前記ノズルから吐出される液滴量の変動情報を取得する工程と、b)塗布処理において前記塗布ヘッドと前記媒体とを相対的に移動させる相対移動速度と、当該塗布処理において前記駆動素子に与える制御信号の周波数とを、前記変動情報を用いて決定する工程と、c)前記b)工程で決定された相対移動速度で前記塗布ヘッドと前記媒体とを相対的に移動させつつ、前記b)工程で決定された周波数の制御信号を前記駆動素子に与えて前記ノズルから前記媒体に向けて前記薬液の液滴を吐出させることによって、塗布処理を実行させる工程と、を備える。
【0011】
請求項2に記載の発明は、請求項1に記載の薬液塗布方法であって、前記変動情報が、周波数の複数の代表値のそれぞれと、周波数を当該代表値とした制御信号を前記駆動素子に与えた場合に前記ノズルから吐出される液滴量とを対応付けて記憶したテーブルの形で保持されており、前記b)工程において、前記複数の代表値のそれぞれについて、周波数を当該代表値として塗布処理を行う場合に前記媒体に目標塗布量の薬液を塗布可能な相対移動速度の値を前記変動情報に基づいて算出し、当該算出された値を当該代表値と対にしてパラメータ候補として取得し、前記複数の代表値に基づいて取得された複数の前記パラメータ候補のうち、オペレータにより選択された一のパラメータ候補において対にされている前記代表値と前記算出された値とを、前記塗布処理における前記周波数と前記相対移動速度とにそれぞれ決定する。
【0012】
請求項3に記載の発明は、請求項1または2に記載の薬液塗布方法であって、前記変動情報が、周波数の複数の代表値のそれぞれと、周波数を当該代表値とした制御信号を前記駆動素子に与えた場合に前記ノズルから吐出される液滴量とを対応付けて記憶したテーブルの形で保持されており、前記b)工程において、前記複数の代表値のうち、オペレータが周波数の値として選択した一の代表値について、周波数を当該代表値として塗布処理を行う場合に前記媒体に目標塗布量の薬液を塗布可能な相対移動速度の値を前記変動情報に基づいて算出し、オペレータにより選択された前記代表値と前記算出された値とを、前記塗布処理における前記周波数と前記相対移動速度とにそれぞれ決定する。
【0013】
請求項4に記載の発明は、請求項1から3のいずれかに記載の薬液塗布方法であって、d)オペレータが目標塗布量の変更を指示した場合に、周波数を現状の設定値のままとしつつ前記媒体に指示された新たな目標塗布量の薬液を塗布可能な相対移動速度の値を算出し、当該算出された値を前記塗布処理における新たな相対移動速度に再決定する工程と、e)前記駆動素子に与える制御信号の周波数を変化させずに前記ノズルから前記媒体に向けて前記薬液の液滴を吐出させつつ、前記d)工程で再決定された前記新たな相対移動速度で前記塗布ヘッドと前記媒体とを相対的に移動させることによって、前記塗布処理を実行させる工程と、を備える。
【0014】
請求項5に記載の発明は、請求項1または4に記載の薬液塗布方法であって、前記変動情報が、前記駆動素子に与える制御信号の周波数の変化に伴う、前記ノズルから吐出される液滴量の変動を表す関数の形で保持されており、前記b)工程において、オペレータが周波数の値として入力した値について、周波数を当該入力値として塗布処理を行う場合に前記媒体に目標塗布量の薬液を塗布可能な相対移動速度の値を前記変動情報に基づいて算出し、前記入力値と前記算出された値とを、前記塗布処理における前記周波数と前記相対移動速度とにそれぞれ決定する。
【0015】
請求項6に記載の発明は、請求項1、4、5のいずれかに記載の薬液塗布方法であって、前記変動情報が、前記駆動素子に与える制御信号の周波数の変化に伴う、前記ノズルから吐出される液滴量の変動を表す関数の形で保持されており、前記b)工程において、オペレータが相対移動速度の値として入力した値について、相対移動速度を前記入力値として塗布処理を行う場合に前記媒体に目標塗布量の薬液を塗布可能な制御信号の周波数の値を前記変動情報に基づいて算出し、前記算出された値と前記入力値とを、前記塗布処理における前記周波数と前記相対移動速度とにそれぞれ決定する。
【0016】
請求項7に記載の発明は、媒体に向けて、駆動素子が設けられたノズルから薬剤を含む薬液を液滴として吐出する塗布ヘッドと、前記塗布ヘッドと前記媒体とを相対的に移動させる相対移動機構と、前記駆動素子に与える制御信号の周波数の変化に伴う、前記ノズルから吐出される液滴量の変動情報を記憶する変動情報記憶部と、塗布処理に先立って、当該塗布処理において前記塗布ヘッドと前記媒体とを相対的に移動させる相対移動速度と、当該塗布処理において前記駆動素子に与える制御信号の周波数とを、前記変動情報を用いて決定するパラメータ決定部と、前記相対移動機構を制御して、前記パラメータ決定部により決定された相対移動速度で前記塗布ヘッドと前記媒体とを相対的に移動させつつ、前記パラメータ決定部により決定された周波数の制御信号を前記駆動素子に与えて前記ノズルから前記媒体に向けて前記薬液の液滴を吐出させることによって、塗布処理を実行させる塗布処理制御部と、を備える。
【0017】
請求項8に記載の発明は、請求項7に記載の薬液塗布装置であって、前記変動情報が、周波数の複数の代表値のそれぞれと、周波数を当該代表値とした制御信号を前記駆動素子に与えた場合に前記ノズルから吐出される液滴量とを対応付けて記憶したテーブルの形で保持されており、前記パラメータ決定部が、前記複数の代表値のそれぞれについて、周波数を当該代表値として塗布処理を行う場合に前記媒体に目標塗布量の薬液を塗布可能な相対移動速度の値を前記変動情報に基づいて算出し、当該算出された値を当該代表値と対にしてパラメータ候補として取得し、前記複数の代表値に基づいて取得された複数の前記パラメータ候補のうち、オペレータにより選択された一のパラメータ候補において対にされている前記代表値と前記算出された値とを、前記塗布処理における前記周波数と前記相対移動速度とにそれぞれ決定する。
【0018】
請求項9に記載の発明は、請求項7または8に記載の薬液塗布装置であって、前記変動情報が、周波数の複数の代表値のそれぞれと、周波数を当該代表値とした制御信号を前記駆動素子に与えた場合に前記ノズルから吐出される液滴量とを対応付けて記憶したテーブルの形で保持されており、前記パラメータ決定部が、前記複数の代表値のうち、オペレータが周波数の値として選択した一の代表値について、周波数を当該代表値として塗布処理を行う場合に前記媒体に目標塗布量の薬液を塗布可能な相対移動速度の値を前記変動情報に基づいて算出し、オペレータにより選択された前記代表値と前記算出された値とを、前記塗布処理における前記周波数と前記相対移動速度とにそれぞれ決定する。
【0019】
請求項10に記載の発明は、請求項7から9のいずれかに記載の薬液塗布装置であって、前記パラメータ決定部が、オペレータが前記目標塗布量の変更を指示した場合に、周波数を現状の設定値のままとしつつ前記媒体に指示された新たな目標塗布量の薬液を塗布可能な相対移動速度の値を算出し、当該算出された値を前記塗布処理における新たな相対移動速度に再決定し、前記塗布処理制御部が、前記駆動素子に与える制御信号の周波数を変化させずに前記ノズルから前記媒体に向けて前記薬液の液滴を吐出させつつ、前記パラメータ決定部が再決定した前記新たな相対移動速度で前記塗布ヘッドと前記媒体とを相対的に移動させることによって、前記塗布処理を実行させる。
【0020】
請求項11に記載の発明は、請求項7または10に記載の薬液塗布装置であって、前記変動情報が、前記駆動素子に与える制御信号の周波数の変化に伴う、前記ノズルから吐出される液滴量の変動を表す関数の形で保持されており、前記パラメータ決定部が、オペレータが周波数の値として入力した値について、周波数を当該入力値として塗布処理を行う場合に前記媒体に目標塗布量の薬液を塗布可能な相対移動速度の値を前記変動情報に基づいて算出し、前記入力値と前記算出された値とを、前記塗布処理における前記周波数と前記相対移動速度とにそれぞれ決定する。
【0021】
請求項12に記載の発明は、請求項7、10、11のいずれかに記載の薬液塗布装置であって、前記変動情報が、前記駆動素子に与える制御信号の周波数の変化に伴う、前記ノズルから吐出される液滴量の変動を表す関数の形で保持されており、前記パラメータ決定部が、オペレータが相対移動速度の値として入力した値について、相対移動速度を前記入力値として塗布処理を行う場合に前記媒体に目標塗布量の薬液可能な前記制御信号の周波数の値を前記変動情報に基づいて算出し、前記算出された値と前記入力値とを、前記塗布処理における前記周波数と前記相対移動速度とにそれぞれ決定する。
【発明の効果】
【0022】
請求項1,7に記載の発明によると、塗布処理において、塗布ヘッドと媒体とを相対的に移動させる速度と、駆動素子に与える制御信号の周波数とを、制御信号の周波数の変化に伴う液滴量の変動を加味して決定するので、媒体へ薬液を求められる量だけ正確に塗布することができる。
【0023】
請求項2、8に記載の発明によると、複数のパラメータ候補のうち、オペレータが選択したパラメータ候補を採用する。したがって、オペレータが所望するとおりの態様(例えば、オペレータが所望するとおりの処理速度、解像度)で、塗布処理を行うことができる。
【0024】
請求項3、9に記載の発明によると、周波数の複数の代表値のうち、オペレータが選択した値を塗布処理における制御信号の周波数として採用するので、オペレータが所望するとおりの態様で塗布処理を行うことができる。
【0025】
請求項4、10に記載の発明によると、オペレータが目標塗布量の変更を指示した場合に、駆動素子に与える制御信号の周波数を変化させずに、塗布ヘッドと媒体とを相対的に移動させる相対移動速度を変更することによって、塗布量を変更する。この構成によると、ノズルから単位時間あたりに吐出される液滴量が変化しないので、簡易かつ正確に、塗布される薬液の量を新たな塗布量に変更することができる。
【0026】
請求項5、11に記載の発明によると、オペレータが入力した値を塗布処理における制御信号の周波数とするので、オペレータが所望するとおりの態様で塗布処理を行うことができる。
【0027】
請求項6、12に記載の発明によると、オペレータが入力した値を、塗布処理における相対移動速度とするので、オペレータが所望するとおりの態様で塗布処理を行うことができる。
【図面の簡単な説明】
【0028】
【図1】薬液塗布装置の要部構成の一部を示す図である。
【図2】薬液塗布装置の要部構成を模式的に示す図である。
【図3】制御部の構成を示すブロック図である。
【図4】塗布ヘッドの断面図である。
【図5】塗布ヘッドの断面図である。
【図6】制御信号の波形の一例を模式的に示す図である。
【図7】貼付剤の製造工程を説明するための図である。
【図8】制御信号の駆動周波数の変化に伴うドロップマスの変動の様子を模式的に示す図である。
【図9】変動情報テーブルの構成例を示す図である。
【図10】塗布処理のパラメータを決定する処理の流れを示す図である。
【図11】パラメータの値の組み合わせを算出する処理の流れを示す図である。
【図12】パラメータ候補を一覧表示する画面の構成例を示す図である。
【図13】塗布処理のパラメータを決定する処理の流れを示す図である。
【図14】パラメータを再決定する処理の流れを示す図である。
【図15】パラメータを再決定する処理の流れを示す図である。
【図16】変動情報関数を例示する図である。
【図17】塗布処理のパラメータを決定する処理の流れを示す図である。
【発明を実施するための形態】
【0029】
以下、図面を参照しつつ本発明の実施の形態に係る薬液塗布装置について詳細に説明する。薬液塗布装置は、基材シートに薬剤を塗布して貼付剤を製造する装置である。
【0030】
<1.装置構成>
薬液塗布装置1の構成について、図1、図2を参照しながら説明する。図1は、薬液塗布装置の要部構成の一部を示す図である。図2は、薬液塗布装置1の要部構成を模式的に示す図である。
【0031】
薬液塗布装置1は、予め粘着剤が塗られた帯状の支持体92上に塗布対象物(ここでは、円形の基材シート)90を一定間隔で貼設し、その基材シート90上に薬液を塗布する装置である。
【0032】
薬液塗布装置1は、図2に示すように、帯状の支持体92を水平方向に沿って搬送する搬送機構10と、搬送される支持体92上に貼設された基材シート90の位置を検出する位置検出センサ20と、基材シート90に薬剤を含む薬液を吹き付けて塗布する塗布ユニット30と、塗布ユニット30に薬液を送給する薬液送給部40と、基材シート90に塗布した薬液を乾燥させる乾燥ユニット50とを備える。また、薬液塗布装置1は、装置に設けられた上記の各要素を制御する制御部60を備える。
【0033】
<搬送機構10>
搬送機構10は、長尺の帯状の支持体92が巻回された送りローラ11を備える。搬送機構10は、図示を省略するテンションローラや補助ローラをも備えており、送りローラ11から送り出された支持体92を水平方向に沿って搬送する。支持体92は、塗布ユニット30に基材シート90を順次搬送供給する役割を担うものであり、ネル生地、織布、メリヤス、不織布、樹脂フィルムなどにて形成することができる。支持体92の幅は例えば60mmである。この実施の形態においては、送りローラ11に巻回された支持体92の片面全面に予め粘着剤91が積層されており(図7参照)、搬送機構10は、粘着剤91の層が既に形成された支持体92を送りローラ11から送り出し、粘着剤層が上側を向くように支持体92を搬送する。
【0034】
また、薬液塗布装置1は、送りローラ11の近傍に図示を省略するシート供給機構を備えており、そのシート供給機構によって送りローラ11から送り出された支持体92に塗布対象物となる円板形状の基材シート90を供給する。薬剤を直接担持する基材シート90は、薬剤に対する不透過性を有する樹脂材料(例えば、PET(ポリエチレンテレフタレート)、PP(ポリプロピレン)、PE(ポリエチレン)等)により形成されている。
【0035】
また、薬液塗布装置1は、エンコーダ12を備えている。エンコーダ12は、支持体92が搬送機構10により所定距離だけ搬送される毎にパルス信号を出力する。エンコーダ12としては、例えば、支持体92の搬送量に応じて回転し、所定の回転量毎にパルス信号を出力するロータリーエンコーダを用いることができる。
【0036】
<位置検出センサ20>
位置検出センサ20は、基材シート90の搬送方向について塗布ユニット30よりも上流側に設けられている。位置検出センサ20は、塗布ヘッド31から薬液の液滴が吹き付けられる前に、支持体92上における基材シート90の位置を検出する。位置検出センサ20によって検出された基材シート90の位置情報に基づいて、その基材シート90に正確に薬液の液滴が吹き付けられるように制御部60が塗布ヘッド31の薬液吐出位置を制御する。位置検出センサ20としては、反射式若しくは透過式の光学式センサ、または、超音波センサなどの各種センサを用いることができる。また、位置検出センサ20に代えて撮像カメラを設け、その撮像カメラによって支持体92上面を撮像して得られた画像データを処理することによって基材シート90の位置を検出するようにしてもよい。
【0037】
<塗布ユニット30>
塗布ユニット30は、搬送機構10によって搬送される基材シート90に薬剤を含む薬液を塗布する機能部であり、機械的に固定して内包された塗布ヘッド31を備える。
【0038】
塗布ヘッド31は、薬剤を含む薬液を微滴化して微小液滴を生成し、その液滴を搬送機構10によって搬送される基材シート90の上面に吹き付ける。具体的には、塗布ヘッド31は、搬送方向TDに垂直な方向(支持体92の幅方向)に沿って、支持体92の全幅と同等かそれ以上の幅を有する。また、塗布ヘッド31の下面には、複数個のノズル311(図4参照)が設けられている。複数個のノズル311は、搬送方向TDに垂直な方向に沿って、所定のピッチで一列に配列される。後に詳細に説明するように、制御部60は、積層圧電素子320の駆動部321に電圧を印加することにより、ノズル311から薬液を吐出させる。なお、支持体92の幅方向におけるノズル311の配列ピッチは、これが小さいほど薬液塗布の精度を向上させることができるため、なるべく小さくすることが好ましい。塗布ヘッド31の具体的な内部構造については、後に説明する。
【0039】
なお、塗布ユニット30には、塗布ユニット30に設けられた塗布ヘッド31を加熱または冷却して薬液の温調を行う温調部(図示省略)を付設してもよい。温調部としては、所定温度の温調水を導入する温調配管、または、ヒータを用いることができる。薬液の粘度および表面張力は薬液の温度にも依存するところ、温調部により薬液の温調を行うことによって薬液の粘度および表面張力が液滴ジェット方式のノズルから噴出可能な適正範囲内に収まるように調整することができる。また、薬液の粘度および表面張力が変化すると、ノズルの先端付近に形成される薬液のメニスカス量が変化し、ノズルから噴出される液滴の量が変化するという問題も生じるところ、温調部により塗布ヘッド31内の薬液の温度を一定(例えば20℃)に保つことによって、ノズルから噴出される液滴の量も一定にすることができる。温調部は、塗布ヘッド31内に内蔵してもよい。
【0040】
<薬液送給部40>
薬液送給部40は、塗布ユニット30に薬液を送給する。薬液送給部40は、薬液を貯留する薬液タンク41を備える。薬液タンク41は、供給配管42を介して塗布ユニット30の塗布ヘッド31と連通接続されている。供給配管42の経路途中には異物除去フィルターおよび脱気フィルター(いずれも図示省略)が介挿されている。薬液タンク41は、常に一定量の薬液を貯留しており、調合タンク(図示省略)から適宜薬液タンク41に薬液が補充される。
【0041】
ここで、薬液とは薬剤を含む液体である。貼付剤に用いられる薬剤の具体的な種類は特に限定されるものではないが、皮膚を通して投与し得るもの、すなわち経皮吸収可能な薬剤が好ましい。そのような薬剤として、より具体的には、インドメタシン、ケトプロフェン、フルルビプロフェン、イブプロフェン、ビロキシカム、サリチル酸メチル、サリチル酸グリコール、l-メントール、dl-カンフル、ノニル酸ワリニリルアシド、カプサイシンなどの鎮痛消炎剤があげられる。また、ニトログリセリン、ニフェジピン、イソソルバイドナイトレートなどの冠血管拡張剤、または、プロカテロール、ツロブテロールなどの喘息薬を薬剤として使用してもよい。さらに、上記の他にも薬剤としては、全身性麻酔薬、催眠・鎮静薬、抗てんかん薬、鎮暈薬、精神神経用薬、骨格筋弛緩薬、自律神経用薬、鎮痙薬、抗パーキンソン薬、抗ヒスタミン薬、強心薬、不整脈用薬、利尿薬、血圧降下薬、血管収縮薬、末梢血管拡張薬、動脈硬化用薬、循環器用薬、呼吸促進薬、鎮咳去痰薬、ホルモン薬、化膿性疾患用外用薬、鎮痛・鎮痒・収斂・消炎用薬、寄生性皮膚疾患用薬、止血用薬、痛風治療用薬、糖尿病用薬、抗悪性腫瘍用薬、抗生物質、化学療法薬、麻薬、抗うつ用薬、禁煙補助薬(ニコチン)などを使用することができる。
【0042】
このような薬剤が溶媒中に溶解されて薬液とされている。溶媒としては、薬剤の性質に応じて、水、または、アルコールを用いることができる。薬剤が溶媒中に溶解された所定濃度の薬液が調合タンクにて調合され、その薬液が調合タンクから供給されて薬液タンク41に貯留される。薬液タンク41に貯留されている薬液は、塗布ヘッド31が薬液を噴出したときにノズル内に生じる毛管現象によって各ノズルに送給される。薬液の送給過程において、供給配管42を流れる薬液から異物および気泡が異物除去フィルターおよび脱気フィルターによってそれぞれ取り除かれる。なお、薬液には、基材シート90への密着性を高めるバインダー、および/または、添加剤がさらに含まれていてもよい。また、薬液には、薬液の粘度および表面張力を調整するために薬剤の溶媒が添加されてもよい。また、薬液には、薬液の乾燥速度を低下させるために保湿剤が添加されてもよい。
【0043】
また、薬液送給部40は、薬液タンク41から供給配管42を介して塗布ユニット30の塗布ヘッド31に負圧を付与する負圧ポンプ(図示省略)を備えてもよい。ノズルに供給された薬液は、そのままでは自重でノズルの先端付近に液滴ジェット方式に適したメニスカスを形成できないところ、負圧ポンプによって吐出方向とは逆向きの負圧を薬液に与えておけば、薬液を若干ノズル内に引き戻して適正なメニスカスを形成することができる。さらに、薬液タンク41の下部に、薬液タンク41内の薬液の温度を所定温度(例えば20℃)に温調するための温調機(図示省略)を付設してもよい。
【0044】
<乾燥ユニット50>
乾燥ユニット50は、塗布ユニット30よりも基材シート90の搬送方向下流側に設けられている。乾燥ユニット50は、その内側を通過する基材シート90に塗布されている薬液を乾燥させる。乾燥ユニット50としては、基材シート90の表面に常温のドライエアーまたは加熱したドライエアー(温風)を送風するものなど公知の種々の乾燥装置を用いることができる。また、乾燥ユニット50としては、単なる熱風(特段の除湿を行っていない)を供給する熱風乾燥炉や遠赤外線ヒータを用いた乾燥炉を用いるようにしてもよい。
【0045】
<制御部60>
制御部60は、薬液塗布装置1に設けられた上記の種々の動作機構を制御する。制御部60の構成について、図3を参照しながら具体的に説明する。図3は、制御部60の構成例を示すブロック図である。
【0046】
制御部60のハードウェアとしての構成は一般的なコンピュータと同様である。すなわち、制御部60は、各種演算処理を行うCPU61、基本プログラムを記憶する読み出し専用のメモリであるROM62、各種情報を記憶する読み書き自在のメモリであるRAM63、および、処理プログラムPやデータなどを記憶しておく固定ディスク64をバスライン69に接続して構成されている。
【0047】
また、バスライン69には、上述したエンコーダ12、位置検出センサ20、および、塗布ヘッド31がインターフェイス(I/F)65を介して接続されている。これら以外の薬液塗布装置1の各種動作機構も図示を省略するインターフェイスを介してバスライン69に接続されている。制御部60のCPU61は、固定ディスク64に格納されている処理プログラムPを実行することにより、これら塗布ヘッド31などの各動作機構を制御して貼付剤製造処理を進行させる。
【0048】
また、バスライン69には、表示装置66および入力装置67が電気的に接続されている。表示装置66は、例えば液晶ディスプレイ等を用いて構成されており、処理結果やメッセージ等の種々の情報を表示する。入力装置67は、例えばキーボードやマウス等を用いて構成されており、コマンドやパラメータ等の入力を受け付ける。装置のオペレータは、表示装置66に表示された内容を確認しつつ入力装置67からコマンドやパラメータ等の入力を行うことができる。なお、表示装置66と入力装置67とを一体化してタッチパネルとして構成するようにしてもよい。
【0049】
さらに、バスライン69には、DVDやCDなどの記録媒体RMから記録内容を読み取る読取装置68が接続されている。処理プログラムPは、記録媒体RMから読取装置68によって読み出されて固定ディスク64に格納されるようにしてもよい。
【0050】
以上が、薬液塗布装置1の主たる構成要素である。なお、上記の構成以外にも薬液塗布装置1は、詳説を省略する種々の機構を備えている。例えば、乾燥ユニット50よりもさらに下流側には、薬液が塗布された基材シート90に剥離ライナーを貼り合わせる機構や支持体92を裁断する機構が設けられている。
【0051】
<2.塗布ヘッド31>
ここで、塗布ヘッド31についてより具体的に説明する。塗布ヘッド31は、液滴ジェット方式によって薬液を噴出する液滴ジェットヘッドである。この実施の形態においては、塗布ヘッド31は、駆動方式が積層ピエゾドロップオンデマンド方式のインクジェットヘッドであるとする。
【0052】
<2−1.構成>
塗布ヘッド31の構成について、図4、図5を参照しながら説明する。図4は、塗布ヘッド31の側断面図である。また、図5は、塗布ヘッド31を図4の矢印K方向からみた断面図である。
【0053】
塗布ヘッド31は、ベース310と、ベース310に固定された積層圧電素子320とを備える。ベース310は、例えば、チタン酸バリウム系セラミックからなり、その上面には、積層圧電素子320が2列に配置されている。
【0054】
積層圧電素子320は、例えば、厚み10〜50μm/1層のチタン酸ジルコン酸鉛(PZT)の圧電層と、厚み数μm/1層の銀・パラジウム(AgPd)からなる内部電極層とを交互に積層することにより形成される。内部電極層は両端で外部電極に接続する。
【0055】
積層圧電素子320は、図5に示すように、ハーフカットのダイシング加工により櫛歯上に分割された部分を備え、各部分は、1つ毎に駆動部321、あるいは、支持部322(非駆動部)として使用される。外部電極の外側はハーフカットのダイシング加工で分割されるように、切り欠き等の加工により長さを制限しており、これらは複数の個別電極となる。他方はダイシングでは分割されずに導通しており共通電極となる。駆動部321の個別電極にはFPC330(図4参照)が半田接合されている。また、共通電極は積層圧電素子の端部に電極層を設けて回し込んでFPC330のGnd電極に接合している。FPC330にはドライバICが実装されており、これにより駆動部321へ印加される電圧(駆動電圧K)を制御している。
【0056】
積層圧電素子320には、振動板340が接合される。振動板340は、薄膜のダイヤフラム部341と、ダイヤフラム部341の中央部に形成された島状凸部(アイランド部)342とを備える。また、振動板340には、後述するフレーム350の共通液室351と連通する流入口343が形成される。凸部342は、積層圧電素子320の駆動部321と接合される。振動板340は、例えば、電鋳工法によるNiメッキ膜を2層重ねて形成される。また、ダイヤフラム部341の厚みは例えば、3μm、幅は例えば、35μm(片側)である。また、振動板340(具体的には、凸部342)と積層圧電素子320の駆動部321との結合、および、振動板340と後述するフレーム350との結合は、ギャップ材を含んだ接着層344をパターニングすることにより行うことができる。
【0057】
振動板340における、積層圧電素子320が接合された面と同じ側の面には、フレーム350が接合される。フレーム350の内部には、彫り込みにより共通液室351が形成される。共通液室351は、振動板340に形成された流入口343と連通する。フレーム350は、例えば、樹脂成形により得ることができる。
【0058】
振動板340における、積層圧電素子320、および、フレーム350が接合された面とは逆側の面には、流路板360が接合される。流路板360の内部には、彫り込みにより加圧液室361が形成される。加圧液室361内には、流体抵抗部362が配置される。また、流路板360の内部には、加圧液室361を後述するノズル311に連通させる連通口363が形成される。流路板360は、例えば、シリコン単結晶基板を用いて形成される。また、流体抵抗部362、加圧液室361となる彫り込み、および、連通口363となる貫通口は、エッチング工法でパターニングすることにより形成することができる。この場合、エッチングで残された部分が加圧液室361の隔壁3611となる。また、エッチング幅を狭くする部分を設け、これを流体抵抗部362とすることができる。
【0059】
流路板360における、振動板340と接合された面とは逆側の面には、ノズル板370が接合される。ノズル板370は、金属材料、例えば、電鋳工法によるNiメッキ膜等で形成したものであり、液滴を飛翔させるための微細な吐出口であるノズル311が多数形成される。ノズル311の内部形状(内側形状)は、ホーン形状(略円柱形状又は略円錘台形状でもよい)とされる。また、このノズル311の径は液滴の出口側の直径において、例えば20μm〜35μmとされる。また各列のノズルピッチは例えば、300dpiとされる。また、ノズル板370の吐出面(ノズル表面側)には、吐出される薬液に対して撥水性を有する表面処理を施した撥水層372が設けられる。撥水層372としては、例えば、フッ素樹脂、シリコン樹脂等の樹脂層、Ni/PTFE共析膜等の金属/樹脂複合膜などを用いることができる。
【0060】
<2−2.動作態様>
続いて、塗布ヘッド31の動作態様について、図4、図5に加え、図6を参照しながら説明する。図6は、制御信号Qの波形の一例を模式的に示す図である。
【0061】
塗布ヘッド31は、積層圧電素子320の駆動部321に制御信号Qが与えられることによって、液滴を吐出する。すなわち、塗布ヘッド31において、積層圧電素子320の駆動部321に制御信号Qが印加されると、駆動部321に積層方向の変位が生起し、振動板340を介して加圧液室361が加圧され、その内部の圧力が上昇する。これによって、ノズル311から1滴(1ドロップ)の液滴が吐出される。
【0062】
液滴の吐出が終了すると、これに伴って、加圧液室361内の圧力が低減し、薬液の流れの慣性と駆動パルスの放電過程によって加圧液室361内に負圧が発生する。すると、薬液タンク41から供給され、共通液室351に流入した薬液が、共通液室351から、流入口343、および、流体抵抗部362を経て、加圧液室361内に充填される。
【0063】
流体抵抗部362は、吐出後の残留圧力振動の減衰に効果が有る反面、表面張力による再充填(リフィル)に対して抵抗になる。流体抵抗部を適宜に選択することで、残留圧力の減衰とリフィル時間のバランスが取れ、次のインク滴吐出動作に移行するまでの時間(駆動周期)を短くできる。
【0064】
図6に例示されるように、制御信号Qは、一定周期で送出されるパルス信号である。ここで、ノズル311から単位時間に吐出される液滴(ドロップ)の個数は制御信号Qの周波数(以下「駆動周波数」という)Fと一致する。つまり、1個のノズル311から単位時間あたりに吐出される液滴の重さ(以下「単位吐出量」という)Rは、ノズル311から吐出される1ドロップの液滴の重さ(以下「ドロップマス」という)Mに駆動周波数Fを乗じた値となる(単位吐出量R=ドロップマスM×駆動周波数F)。
【0065】
なお、制御信号Qにおいて、パルス波における高電位と低電位との電位差(駆動電圧K)を大きくすると、ノズル311から吐出される際の液滴の速度が大きくなり、ドロップマスMも大きくなる。ここで、安定した塗布性能を実現するためには、ノズル311から吐出される際の液滴の速度が、約7(m/s)となっていることが好ましい。そこで、薬液塗布装置1においては、制御信号Qの駆動電圧Kは、ノズル311から吐出される液滴の速度が目標速度(例えば、7(m/s))となるような値に予め調整され、当該値に固定される。
【0066】
<3.貼付剤の製造処理>
上記の構成を有する薬液塗布装置1において行われる貼付剤の製造処理の流れを、図7を参照しながら説明する。図7は、薬液塗布装置1における貼付剤の製造工程を説明するための図である。
【0067】
なお、以下の処理は、制御部60のCPU61が処理プログラムPを実行して薬液塗布装置1の各動作機構を制御することによって進行する。すなわち、制御部60には、薬液塗布装置1が備える各動作機構を制御することによって、塗布処理を実行させる「塗布処理制御部601」としての機能が実現される(図2参照)。
【0068】
塗布処理制御部601は、搬送機構10に、予め決定された搬送速度Vで支持体92を水平方向に沿って搬送開始させるとともに、シート供給機構(図示省略)に支持体92の上面に一定間隔で円板形状の基材シート90を供給開始させる。送りローラ11から送り出されて水平方向に搬送される支持体92の上面には粘着剤91の層が予め形成されており、供給された基材シート90は支持体92上に貼設される。つまり、支持体92上に貼設された基材シート90が、塗布ヘッド31に対して搬送速度Vで相対移動することになる。支持体92上に貼設されたそれぞれの基材シート90の位置は位置検出センサ20によって検出されて塗布処理制御部601に伝達される。
【0069】
塗布処理制御部601は、位置検出センサ20から取得した位置情報に基づいて塗布ヘッド31を制御して、ノズル311から、レシピにて指定された種類の薬液の液滴を基材シート90に向けて吐出させる。具体的には、塗布処理制御部601は、塗布ヘッド31の積層圧電素子320に、予め決定された駆動周波数Fの制御信号Qを与える。すると、塗布ヘッド31は、与えられた制御信号Qに従って、薬剤を含む薬液を微滴化して微小液滴を生成し、生成された液滴を、搬送機構10によって搬送される基材シート90に向けて吐出する。これにより、基材シート90に薬剤層95が形成されることになる。
【0070】
ただし、基材シート90にどのような塗布パターンで薬剤層を形成するかは例えばレシピにより指定されており、塗布処理制御部601は、レシピにて指定された塗布パターンが記述された2値の画像データを後述する一連の処理により取得する。そして、当該取得した画像データに基づいて塗布ヘッド31に設けられた全てのノズル311についてオン/オフのタイミングを制御する。すなわち、ある領域(画像データにおいて「1」とされている領域)に薬液を吹き付けるときには、その領域に対応するノズル311の積層圧電素子320に制御信号Qを印加して当該ノズル311から薬液の液滴を噴出させる。これによって、基材シート90に1ラインずつ薬液の塗布パターンが形成されていく。なお、塗布ヘッド31からの薬液の吐出タイミングは、例えば、エンコーダ12からのパルス信号に基づいて特定される。これによって、基材シート90に、レシピに指定された塗布パターンで薬剤層95が形成されることになる。
【0071】
薬剤層95が形成された基材シート90は乾燥ユニット50に搬送され、ここで薬液の乾燥処理を施される。さらにその後、基材シート90には剥離ライナーが貼り合わされ、支持体92が所定のサイズに裁断されて貼付剤とされる。以上の処理によって、貼付剤が製造される。
【0072】
<4.パラメータの決定>
上述したとおり、薬液塗布装置1の制御部60において実現される塗布処理制御部601は、塗布ヘッド31と基材シート90とを相対的に移動させつつ(具体的には、搬送機構10に基材シート90を搬送させつつ)、塗布ヘッド31から基材シート90に向けて薬液の液滴を吐出させることによって、塗布処理を実行させる。ところで、この塗布処理においては、基材シート90上に薬剤が求められる量だけ正確に塗布される必要がある。ここで、基材シート90に塗布される薬液の量は、各ノズル311から単位時間あたりに吐出される液滴の量(単位吐出量R)、塗布ヘッド31と基材シート90との相対移動速度(具体的には、基材シート90の搬送速度V))等から規定される。ただし、上述したとおり、単位吐出量Rは、塗布ヘッド31に印加される制御信号Qの周波数(駆動周波数F)とノズル311から吐出される液滴のドロップマスMとから規定される。したがって、基材シート90上に薬剤が求められる量だけ正確に塗布されるためには、塗布処理におけるパラメータ(具体的には、塗布処理において塗布ヘッド31に印加する制御信号Qの駆動周波数Fの値、および、塗布処理において搬送機構10に基材シート90を搬送させる搬送速度Vの値)が適切な値に決定されている必要がある。制御部60には、塗布処理に先立って、これらのパラメータを決定する「パラメータ決定部602」としての機能が実現される(図2参照)。パラメータ決定部602は、例えば、CPU61がROM62上のプログラムPを実行することにより実現される。
【0073】
<4−1.変数の関係>
パラメータ決定部602について具体的に説明する前に、パラメータの決定に関連する各種の変数の関係について説明する。上述したとおり、塗布ヘッド31は、基材シート90に対して搬送速度Vで相対移動しながら薬液の液滴を吐出して、基材シート90上に薬剤層95を形成する。ここで、基材シート90上において、単位面積にあたりに塗布される薬液の重さ(以下「塗布量」という)Aは、搬送速度Vと、ノズル311の単位吐出量Rとを用いて、下記(式1)で表される。ただし、(式1)中、「A」は塗布量、「R」は単位吐出量R、「V」は搬送速度Vである。また、「d」は、塗布ヘッド31におけるノズル311の配列ピッチ(以下「ノズルピッチd」という)であり、装置に固有の定数である。
【0074】
A=(1/d)×(R/V) ・・・(式1)
ここで、上述したとおり、単位吐出量Rは、ドロップマスMに制御信号Qの駆動周波数Fを乗じた値である(R=M×F)。
【0075】
ところで、従来においては、ドロップマスMは、塗布ヘッド31に印加される制御信号Qの駆動電圧Kのみに依存する値とみなされていた。したがって、駆動電圧Kが一定値に固定されている場合、駆動周波数Fが変化しても、ドロップマスMは一定のままとみなされていた。このようにみなした場合、塗布量Aは、「c」を定数として、下記(式2)で表されることになる。ただし、(式2)中、「F」は駆動周波数Fである。
【0076】
A=c×(F/V) ・・・(式2)
この場合、塗布量Aを例えばn倍にしたい場合、搬送速度Vを変化させずに駆動周波数Fをn倍に変更すればよいことになる。ところが、実際は、搬送速度Vを変化させずに駆動周波数Fをn倍すると、塗布量Aが元のn倍より僅かに多く(あるいは、僅かに少なく)なってしまう。この誤差の原因は、駆動周波数Fの変化に伴って、ドロップマスMが微小に変動するという事情にある。
【0077】
図8には、2種類の薬液A,Bのそれぞれについて、制御信号Qの駆動周波数Fの変化に伴うドロップマスMの変動の様子が模式的に示されている。ただし、ここでは、制御信号Qの駆動電圧Kは一定とされている。ここに示されるように、ドロップマスMは、駆動周波数Fの変化に応じて不規則に変動する。また、この変動の態様は、薬液の種類によって様々に異なったものとなる。また、この変動の態様は、塗布ヘッド31の特性によっても異なったものとなる。
【0078】
例えば、図8に例示される薬液Aにおいて、駆動周波数Fが「2000(Hz)」の場合のドロップマスMは、「7.40×10-9(g/drop)」である。この場合、単位吐出量Rは、「14.8×10-6(g/sec)」となる。一方、駆動周波数Fがその2倍の「4000(Hz)」となると、ドロップマスMが「6.60×10-9(g/drop)」に変化する。この場合、単位吐出量Rは、「26.4×10-6(g/sec)」となる。つまり、駆動周波数Fを2倍しても、単位吐出量Rは約1.8倍にしかならない。この場合、塗布量Aを2倍にしようとして、搬送速度Vを変化させずに駆動周波数Fを2倍にしても、実際は、元の塗布量の約1.8倍の塗布量しか得られていないことになってしまう。
【0079】
つまり、求められる量の薬液を正確に塗布するためには、駆動周波数Fの変化に伴うドロップマスMの変動を考慮して、塗布処理のパラメータ(搬送速度Vの値、駆動周波数Fの値)を決定する必要がある。
【0080】
<4−2.変動情報>
制御部60の備える記憶装置(例えば固定ディスク64)には、駆動周波数Fの変化に伴うドロップマスMの変動を示す情報(変動情報)が保持されており、パラメータ決定部602は、この変動情報を用いて塗布処理のパラメータを決定する。ただし、上述したとおり、駆動周波数Fの変化に伴うドロップマスMの変動の態様は、薬液の種類、および、塗布ヘッド31の特性によって様々に異なったものとなる。そこで、制御部60には、自装置において使用可能性のある各種の薬液のそれぞれについて、当該薬液を自装置が備える塗布ヘッド31から吐出させた場合の、駆動周波数Fの変化に伴うドロップマスMの変動情報が保持されている。
【0081】
なお、変動情報は、装置の出荷時に固定ディスク64に格納されてもよい。また、記録媒体RMから読取装置68によって読み出されて固定ディスク64に格納されてもよい。また、オペレータが入力装置67を介して入力した情報を制御部60が受け付けて、固定ディスク64に格納してもよい。
【0082】
図9には、固定ディスク64に保持される変動情報が模式的に示されている。この実施の形態においては、変動情報はテーブル(変動情報テーブルT)の形で保持される。
【0083】
固定ディスク64には、1以上の変動情報テーブルTが格納されており、各変動情報テーブルTには、互いに異なる種類の薬液の変動情報が記述されている。なお、図9においては、4個の変動情報テーブルT(すなわち、4種類の薬液についての変動情報テーブルT)が保持される様子が示されているが、さらに多数の(あるいは、小数の)変動情報テーブルTが保持されてもよい。
【0084】
各変動情報テーブルTにおいては、駆動周波数の複数の代表値f(i)(i=1,2,・・・)と、複数の代表値f(i)(i=1,2,・・・)のそれぞれと対応するドロップマスMの値m(i)(i=1,2,・・・)とが、対応付けられて記憶される。ただし、代表値f(i)と対応するドロップマスMの値m(i)とは、駆動周波数Fを当該代表値f(i)とした制御信号Qを積層圧電素子320に与えた場合に、ノズル311から吐出される液滴のドロップマスMの値である。例えば、図9に例示される変動情報テーブルTによると、薬液Aにおいて、駆動周波数Fを代表値f(1)=2000(Hz)とした制御信号Qを積層圧電素子320に与えた場合に、ノズル311から吐出される液滴のドロップマスMの値m(1)は、「7.50×10-9(g/drop)」であることがわかる。
【0085】
なお、各変動情報テーブルTにおいてはさらに細かい刻み幅(あるいは、さらに粗い刻み幅)で駆動周波数Fの代表値f(i)が保持されてもよい。また、刻み幅は一定でなくともよい。また、さらに広い数値範囲(あるいは、さらに狭い数値範囲)で代表値f(i)が保持されてもよい。後に明らかになるように、各テーブルTに保持される代表値f(i)の個数が多くなるほど、オペレータが選択可能なパラメータ候補の数が多くなる。
【0086】
<4−3.パラメータの決定>
パラメータ決定部602は、塗布処理の実行に先立って、固定ディスク64に保持された変動情報テーブルTを用いて、当該塗布処理のパラメータ(駆動周波数Fの値、搬送速度Vの値)を決定する。以下において、パラメータ決定部602がパラメータを決定する処理の流れについて具体的に説明する。なお、以下においては、パラメータを決定する処理の態様を2種類説明する。薬液塗布装置1においては、以下に説明する2つの態様のうちのどちらの態様でパラメータが決定されてもよい。また、オペレータがどちらの態様でパラメータを決定するかを選択できる構成としてもよい。
【0087】
<4−3−1.第1の態様>
第1の態様に係る処理の流れについて、図10を参照しながら具体的に説明する。図10は、当該処理の流れを示す図である。
【0088】
パラメータ決定部602は、まず、レシピに基づいて(あるいは、オペレータからの入力に基づいて)、塗布処理において基材シート90に塗布すべき薬液の種類(対象薬液)、および、基材シート90に塗布すべき薬液の量(目標塗布量)Arを特定する(ステップS11)。
【0089】
続いて、パラメータ決定部602は、対象薬液の変動情報を取得する(ステップS12)。具体的には、対象薬液の変動情報を記述した変動情報テーブル(対象変動情報テーブル)Tを、固定ディスク64から読み出す。
【0090】
続いて、パラメータ決定部602は、対象変動情報テーブルTを用いて、基材シート90に目標塗布量Arの薬液を塗布可能な、駆動周波数Fの値と搬送速度Vの値との組み合わせを算出し、これをパラメータ候補として取得する(ステップS13)。
【0091】
ステップS13の処理について、図11を参照しながら具体的に説明する。図11は、当該処理を説明するための図である。
【0092】
パラメータ決定部602は、対象変動情報テーブルTに保持されている複数の駆動周波数の代表値f(i)(i=1,2,・・・)のうちのいずれかを読み出してこれを対象代表値f(i)とし、対象代表値f(i)と対になる搬送速度の値(以下「搬送速度v(i)」と示す)を算出する。「対象代表値f(i)と対になる搬送速度v(i)」とは、制御信号Qの駆動周波数Fを対象代表値f(i)として塗布処理を行う場合に、目標塗布量Arの薬液を塗布可能な搬送速度Vの値である。すなわち、駆動周波数Fが対象代表値f(i)であるような制御信号Qを与えて塗布ヘッド31から液滴を吐出させた場合に、基材シート90に目標塗布量Arの薬液を塗布するために必要な搬送速度Vの値である。
【0093】
対象代表値f(i)と対になる搬送速度v(i)を算出する態様を具体的に説明する。まず、パラメータ決定部602は、対象変動情報テーブルTを参照して、駆動周波数Fが対象代表値f(i)であるような制御信号Qを与えて塗布ヘッド31から液滴を吐出させた場合の単位吐出量r(i)を算出する。ただし、単位吐出量r(i)は、対象代表値f(i)に、これと対応するドロップマスMの値m(i)(すなわち、対象変動情報テーブルTにおいて対象代表値f(i)と対応付けられているドロップマスMの値m(i))を乗じた値により与えられる。
【0094】
続いて、パラメータ決定部602は、算出された単位吐出量r(i)と、上記(式1)とに基づいて、目標塗布量Arを達成可能な搬送速度v(i)を算出する。すなわち、目標塗布量Arを達成可能な搬送速度v(i)は、下記(式3)で与えられる。
【0095】
v(i)=(1/d)×(r(i)/Ar) ・・・(式3)
パラメータ決定部602は、算出された搬送速度v(i)を、対象代表値f(i)と対にして、1つのパラメータ候補p(i)として取得する。パラメータ候補p(i)は、目標塗布量Arの薬液を塗布可能なパラメータの組み合わせとなっている。
【0096】
例えば、対象薬液が「薬液A」であり、目標塗布量Arが「8.55×10-6(g/mm2)」であるとする。また、ノズルピッチdが「0.08467(mm)」であるとする。この場合、代表値f(2)=4000(Hz)と対になる搬送速度v(2)は次のように算出される。すなわち、駆動周波数Fが対象代表値f(2)=4000(Hz)であるような制御信号Qを与えて塗布ヘッド31から液滴を吐出させた場合の単位吐出量r(2)は、対象変動情報テーブルTを参照することにより「26.4×10-9(g/sec)」と算出される(4000(drop/sec)×6.60×10-6(g/drop)=26.4×10-9(g/sec))。そして、算出された単位吐出量r(2)に基づいて、目標塗布量Arを達成可能な搬送速度v(2)は、「36.47(mm/sec)」と算出される(v(i)=(1/0.08467(mm))×(26.4×10-9(g/sec)/8.55×10-6(g/mm2)))。パラメータ決定部602は、算出された搬送速度v(2)の値「36.47(mm/sec)」を、対象代表値f(2)の値「4000(Hz)」と対にして、1つのパラメータ候補p(2)=(4000(Hz),36.47(mm/sec))として取得する。パラメータ候補p(2)は、目標塗布量Ar=8.55×10-6(g/mm2)の薬液を塗布可能なパラメータの組み合わせとなっている。
【0097】
パラメータ決定部602は、対象変動情報テーブルTに保持されている複数の代表値f(i)(i=1,2,・・・)の全てについて、各代表値f(i)と対になる搬送速度v(i)を算出して、パラメータ候補p(i)を取得する。つまり、対象変動情報テーブルTにおいて保持されている複数の代表値f(i)(i=1,2,・・・)と同数個のパラメータ候補p(i)(i=1,2,・・・)が取得されることになる。
【0098】
再び図10を参照する。ステップS13の処理が終了すると、続いて、パラメータ決定部602は、ステップS13で取得された複数のパラメータ候補p(i)(i=1,2,・・・)を表示装置66に一覧表示させて(ステップS14)、オペレータにいずれかのパラメータ候補を選択させる。図12には、この一覧表示画面の構成例が示されている。ここでは、複数のパラメータ候補p(i)(i=1,2,・・・)のそれぞれについて、各パラメータ候補p(i)で組み合わされている駆動周波数(すなわち、いずれかの代表値f(i))と搬送速度v(i)とが対になって表示される。
【0099】
なお、一覧表示画面には、駆動周波数f(i)、および、搬送速度v(i)に加え、当該駆動周波数f(i)に対応するドロップマスm(i)、目標塗布量Ar、搬送方向ピッチ(基材シート90の搬送方向(ノズル311の配列方向と直交する方向)について、塗布される液滴のピッチであり、搬送速度v(i)を周波数f(i)で割った値により得られる。)、搬送方向解像度(基材シート90の搬送方向について、1インチあたりに塗布される液滴の個数であり、25.4(mm/inch)を搬送方向ピッチで割った値により得られる。)、ノズルピッチd、ノズル数(単位長さあたりのノズル311の個数)等を表示することも好ましい。これらを表示しておけば、オペレータは、例えば、搬送方向に沿う解像度等も参考にしながら、好ましいパラメータを選択することができる。
【0100】
再び図10を参照する。オペレータが、入力装置67を介して、一覧表示されたパラメータ候補p(i)(i=1,2,・・・)のいずれかを選択すると(ステップS15でYES)、パラメータ決定部602は当該選択操作を受け付けて、選択されたパラメータ候補p(i)において対にされている駆動周波数f(i)と搬送速度v(i)とを、塗布処理に係るパラメータに決定する(ステップS16)。すなわち、選択されたパラメータ候補p(i)の搬送速度v(i)を、塗布処理において搬送機構10を駆動する際の搬送速度Vの値に決定する。また、選択されたパラメータ候補p(i)の駆動周波数f(i)を、塗布処理において塗布ヘッド31を制御する制御信号Qの駆動周波数Fの値に決定する。
【0101】
<4−3−2.第2の態様>
第2の態様に係る処理の流れについて、図13を参照しながら具体的に説明する。図13は、当該処理の流れを示す図である。
【0102】
パラメータ決定部602は、まず、レシピに基づいて(あるいは、オペレータからの入力に基づいて)、対象薬液、および、目標塗布量Arを特定する(ステップS21)。
【0103】
続いて、パラメータ決定部602は、対象薬液の変動情報を取得する(ステップS22)。具体的には、対象薬液の変動情報を記述した変動情報テーブル(対象変動情報テーブル)Tを、固定ディスク64から読み出す。
【0104】
続いて、パラメータ決定部602は、対象変動情報テーブルTに保持されている複数の駆動周波数の代表値f(i)(i=1,2,・・・)を表示装置66に一覧表示させて、オペレータにいずれかの代表値f(i)を選択させる(ステップS23)。
【0105】
オペレータが、入力装置67を介して、一覧表示された複数の代表値f(i)(i=1,2,・・・)のいずれかを選択すると(ステップS23でYES)、パラメータ決定部602は当該選択操作を受け付けて、選択された駆動周波数の代表値f(i)を、塗布処理に係るパラメータに決定する(ステップS24)。すなわち、選択された代表値f(i)を、塗布処理において塗布ヘッド31を制御する制御信号Qの駆動周波数Fの値に決定する。
【0106】
続いて、パラメータ決定部602は、選択された代表値f(i)と対になる搬送速度Vの値(搬送速度v(i))を算出する(ステップS25)。すなわち、制御信号Qの駆動周波数Fを選択された代表値f(i)として塗布処理を行う場合に、目標塗布量Arの薬液を塗布可能な搬送速度Vの値を算出する。代表値f(i)と対になる搬送速度v(i)を算出する態様は、上述した通りである。
【0107】
選択された代表値f(i)と対になる搬送速度v(i)が算出されると、パラメータ決定部602は、当該算出された搬送速度v(i)を、塗布処理に係るパラメータに決定する(ステップS26)。すなわち、算出された搬送速度v(i)を、塗布処理において搬送機構10を駆動する際の搬送速度Vの値に決定する。
【0108】
<4−4.パラメータの再決定>
パラメータ決定部602が塗布処理のパラメータ(駆動周波数Fの値、搬送速度Vの値)を決定すると、塗布処理制御部601が薬液塗布装置1の各部を制御することにより、決定されたパラメータで塗布処理が開始される。塗布処理制御部601の制御下で行われる塗布処理の具体的な態様は上述したとおりである。
【0109】
ところで、パラメータ決定部602は、塗布処理が実行されている間にオペレータから目標塗布量Arの変更指示(あるいは、駆動周波数Fの変更指示)を受け付けると、パラメータを再決定する。以下において、パラメータ決定部602がパラメータを再決定する処理の流れについて具体的に説明する。
【0110】
<4−4−1.目標塗布量の変更が指示された場合>
オペレータが、目標塗布量Arの変更を指示した場合に、パラメータ決定部602がパラメータを再決定する処理の流れについて、図14を参照しながら具体的に説明する。図14は、当該処理の流れを示す図である。
【0111】
オペレータが入力装置67を介して新たな目標塗布量(以下「新たな目標塗布量Ar’」と示す)を入力した場合、パラメータ決定部602は、当該入力を受け付ける(ステップS31)。
【0112】
続いて、パラメータ決定部602は、駆動周波数Fを現状の設定値のままとしつつ(すなわち、制御信号Qの駆動周波数Fを変更せずに)、基材シート90に新たな目標塗布量Ar’の薬液を塗布可能な搬送速度Vの値(以下「新たな搬送速度v’」と示す)を算出する(ステップS32)。制御信号Qの駆動周波数Fが変更されない場合、ノズル311の単位吐出量Rは変化しない。したがって、上記(式1)に基づいて、新たな目標塗布量Ar’の薬液を塗布可能な新たな搬送速度v’は、下記(式4)で与えられることになる。ただし、(式4)中、「v」は現在設定中の搬送速度Vを表す。また、「Ar」は変更前の目標塗布量Ar、「Ar’」は新たな目標塗布量Ar’である。
【0113】
v’=(Ar/Ar’)×v ・・・(式4)
すなわち、新たな目標塗布量Ar’が元の目標塗布量Arのx倍であったとすれば、現在設定中の搬送速度Vを(1/x)倍した値を、新たな搬送速度v’として取得することになる。
【0114】
新たな搬送速度v’が算出されると、パラメータ決定部602は、当該算出された新たな搬送速度v’を、塗布処理に係る新たなパラメータに再決定する(ステップS33)。すなわち、塗布処理において搬送機構10を駆動する際の搬送速度Vを、算出された新たな搬送速度v’に再決定する。
【0115】
パラメータ決定部602が塗布処理のパラメータ(ここでは、搬送速度Vの値)を再決定すると、塗布処理制御部601が薬液塗布装置1の各部を制御することにより、決定された新たなパラメータの下で塗布処理を実行させる。すなわち、塗布処理制御部601は、積層圧電素子320に与える制御信号Qの駆動周波数Fを変化させずに(すなわち、現状の設定値のままの駆動周波数Fの制御信号Qを積層圧電素子320に与えて)ノズル311から基材シート90に向けて薬液の液滴を吐出させつつ、搬送機構10に基材シート90を搬送させる搬送速度Vを再決定された新たな搬送速度v’に変更して、塗布処理を実行させる。搬送速度Vの変更後は、塗布処理において基材シート90に塗布される薬液の量が、新たな目標塗布量Ar’に変更されることになる。
【0116】
<4−4−2.駆動周波数の変更が指示された場合>
オペレータが、駆動周波数Fの変更を指示した場合に、パラメータ決定部602がパラメータを再決定する処理の流れについて、図15を参照しながら具体的に説明する。図15は、当該処理の流れを示す図である。
【0117】
オペレータが駆動周波数Fの変更指示を入力した場合、パラメータ決定部602は、当該指示に応じて、対象変動情報テーブルTに保持されている複数の駆動周波数の代表値f(i)(i=1,2,・・・)を表示装置66に一覧表示させて、オペレータにいずれかの代表値f(i)を選択させる(ステップS41)。
【0118】
オペレータが、入力装置67を介して、一覧表示された複数の代表値f(i)(i=1,2,・・・)のいずれかを選択すると(ステップS41でYES)、パラメータ決定部602は当該選択操作を受け付けて、選択された駆動周波数の代表値f(i)を、塗布処理に係る新たなパラメータに再決定する(ステップS42)。すなわち、塗布処理において塗布ヘッド31を制御する制御信号Qの駆動周波数Fを、選択された代表値f(i)に再決定更する。
【0119】
続いて、パラメータ決定部602は、選択された代表値f(i)と対になる搬送速度Vの値(搬送速度v(i))を算出する(ステップS43)。すなわち、制御信号Qの駆動周波数Fを選択された代表値f(i)として塗布処理を行う場合に、目標塗布量Arの薬液を塗布可能な搬送速度Vの値を算出する。代表値f(i)と対になる搬送速度v(i)を算出する態様は、上述した通りである。
【0120】
選択された代表値f(i)と対になる搬送速度v(i)が算出されると、パラメータ決定部602は、当該算出された搬送速度v(i)を、塗布処理に係る新たなパラメータに再決定する(ステップS44)。すなわち、塗布処理において搬送機構10を駆動する際の搬送速度Vを、算出された新たな搬送速度v(i)に再決定する。
【0121】
パラメータ決定部602が塗布処理のパラメータ(ここでは、駆動周波数Fと搬送速度Vの各値)を再決定すると、塗布処理制御部601が薬液塗布装置1の各部を制御することにより、決定された新たなパラメータの下で塗布処理を実行させる。すなわち、塗布処理制御部601は、積層圧電素子320に与える制御信号Qの駆動周波数Fを再決定された新たな代表値f(i)に変更するとともに、搬送機構10に基材シート90を搬送させる搬送速度Vを再決定された新たな搬送速度v(i)に変更して、塗布処理を実行させる。搬送速度Vおよび駆動周波数Fの変更後においても、塗布処理において基材シート90に塗布される薬液の量は、元の目標塗布量Arのまま維持されることになる。
【0122】
<5.効果>
上記の実施の形態に係る薬液塗布装置1によると、パラメータ決定部602が、塗布処理において、塗布ヘッド31と基材シート90とを相対的に移動させる速度(具体的には、基材シート90を移動させる搬送速度V)と、積層圧電素子320に与える制御信号Qの駆動周波数Fとを、変動情報(すなわち、制御信号Qの駆動周波数Fの変化に伴うドロップマスMの変動を記述する情報)を加味して決定するので、基材シート90へ薬液を求められる量だけ正確に塗布することができる。
【0123】
また、パラメータを決定する上記第1の態様によると、複数のパラメータ候補p(i)(i=1,2,・・・)のうち、オペレータが選択したパラメータ候補p(i)を塗布処理のパラメータとして採用する。したがって、オペレータが所望するとおりの態様で、塗布処理を行うことができる。例えば、オペレータは、定められた時間内に塗布処理を完了させたい場合は、それを実現可能な搬送速度Vの値を有するパラメータ候補p(i)を選択すればよい。また例えば、オペレータは、定められた解像度で塗布処理を実行させたい場合は、それを実現可能な搬送速度Vと駆動周波数Fとの組み合わせを有するパラメータ候補p(i)を選択すればよい。
【0124】
また、パラメータを決定する上記第2の態様によると、複数の代表値f(i)(i=1,2,・・・)のうち、オペレータが選択した値を塗布処理における制御信号Qの駆動周波数Fとして採用するので、オペレータが所望するとおりの態様で塗布処理を行うことができる。
【0125】
また、パラメータ決定部602は、オペレータが目標塗布量Arの変更を指示した場合に、塗布処理において積層圧電素子320に与える制御信号Qの駆動周波数Fを変化させずに、塗布ヘッド31と基材シート90とを相対的に移動させる速度(具体的には、搬送速度V)を変更することによって、塗布量を変更する。この構成によると、ノズル311の単位吐出量Rが変化しないので、簡易かつ正確に、塗布される薬液の量を新たな塗布量に変更することができる。
【0126】
<6.変動情報の保持態様に係る変形例>
上記の実施の形態においては、変動情報は、テーブルの形で保持されていたが、変動情報は必ずしもテーブルの形で保持されなくともよい。
【0127】
図16には、固定ディスク64に保持される変動情報の別の構成例が模式的に示されている。ここでは、変動情報は関数(変動情報関数H)の形で保持される。
【0128】
固定ディスク64には、1以上の変動情報関数Hが記憶されており、各変動情報関数Hには、互いに異なる種類の薬液の変動情報を表している。なお、図16においては、4個の変動情報関数H(すなわち、4種類の薬液についての変動情報関数H)が保持される様子が示されているが、さらに多数の(あるいは、小数の)変動情報関数Hが保持されてもよい。
【0129】
各変動情報関数Hは、ノズル311に設けられた積層圧電素子320に与える制御信号Qの駆動周波数Fの変化に伴う、ノズル311から吐出されるドロップマスMの変動を表している。なお、変動情報関数Hは、当該変動を近似的に表すものであってもよい。
【0130】
変動情報が変動情報関数Hの形で保持されている場合、パラメータ決定部602は、固定ディスク64に保持された変動情報関数Hを用いて、塗布処理のパラメータ(駆動周波数Fの値、搬送速度Vの値)を決定する。当該処理の流れについて、図17を参照しながら具体的に説明する。図17は、当該処理の流れを示す図である。
【0131】
パラメータ決定部602は、まず、レシピに基づいて(あるいは、オペレータからの入力に基づいて)、対象薬液、および、目標塗布量Arを特定する(ステップS51)。
【0132】
続いて、パラメータ決定部602は、対象薬液の変動情報を取得する(ステップS52)。具体的には、対象薬液の変動情報を記述した変動情報関数(対象変動情報関数)Hを、固定ディスク64から読み出す。
【0133】
続いて、パラメータ決定部602は、オペレータから、搬送速度Vの値、駆動周波数Fの値のうちのいずれか一方の入力を受け付ける(ステップS53)。オペレータは、搬送速度Vの値、あるいは、駆動周波数Fの値として、任意の数値を指定することができる。
【0134】
いま、ステップS53において、オペレータが、入力装置67を介して、駆動周波数Fの値を入力したとする(ステップS54でYES)。この場合、パラメータ決定部602は、当該入力操作を受け付けて、入力された値(以下「入力値f(j)」と示す)を、塗布処理に係るパラメータに決定する(ステップS55)。すなわち、入力値f(j)を、塗布処理において塗布ヘッド31を制御する制御信号Qの駆動周波数Fの値に決定する。
【0135】
続いて、パラメータ決定部602は、入力値f(j)と対になる搬送速度Vの値(以下「搬送速度v(j)」と示す)を算出する(ステップS56)。すなわち、制御信号Qの駆動周波数Fを入力値f(j)として塗布処理を行う場合に、目標塗布量Arの薬液を塗布可能な搬送速度Vの値を算出する。
【0136】
入力値f(j)と対になる搬送速度v(j)を算出する態様を具体的に説明する。まず、パラメータ決定部602は、対象変動情報関数Hを参照して、駆動周波数Fが入力値f(j)であるような制御信号Qを与えて塗布ヘッド31から液滴を吐出させた場合の単位吐出量r(j)を算出する。ただし、単位吐出量r(j)は、入力値f(j)に、これと対応するドロップマスMの値m(j)(すなわち、対象変動情報関数Hにおいて入力値f(j)に対して与えられるドロップマスMの値m(j))を乗じた値により与えられる。
【0137】
続いて、パラメータ決定部602は、算出された単位吐出量r(j)と、上記(式1)とに基づいて、目標塗布量Arを達成可能な搬送速度v(j)を算出する。すなわち、目標塗布量Arを達成可能な搬送速度v(j)は、下記(式5)で与えられる。
【0138】
v(j)=(1/d)×(r(j)/Ar) ・・・(式5)
入力値f(j)と対になる搬送速度v(j)が算出されると、パラメータ決定部602は、当該算出された搬送速度v(j)を、塗布処理に係るパラメータに決定する(ステップS57)。すなわち、算出された搬送速度v(j)を、塗布処理において搬送機構10を駆動する際の搬送速度Vの値に決定する。これにより、塗布処理に係るパラメータ(搬送速度Vの値、駆動周波数Fの値)がそれぞれ決定されることになる。
【0139】
一方、ステップS53において、オペレータが、入力装置67を介して、搬送速度Vの値を入力したとする(ステップS54でNO)。この場合、パラメータ決定部602は、当該入力操作を受け付けて、入力された値(以下「入力値v(j)」と示す)を、塗布処理に係るパラメータに決定する(ステップS58)。すなわち、入力値v(j)を、塗布処理において搬送機構10を駆動する際の搬送速度Vの値に決定する。
【0140】
続いて、パラメータ決定部602は、入力値v(j)と対になる駆動周波数Fの値(以下「駆動周波数f(j)」と示す)を算出する(ステップS59)。ここで、「入力値v(j)と対になる駆動周波数f(j)」とは、搬送速度Vを入力値v(j)として塗布処理を行う場合に、目標塗布量Arの薬液を塗布可能な駆動周波数Fの値である。
【0141】
入力値v(j)と対になる駆動周波数f(j)を算出する態様を具体的に説明する。まず、パラメータ決定部602は、上記(式1)に基づいて、搬送速度Vが入力値v(j)である場合に、目標塗布量Arを達成するために必要な単位吐出量r(j)を算出する。すなわち、目標塗布量Arを達成可能するために必要な単位吐出量r(j)は、下記(式6)で与えられる。
【0142】
r(j)=d×Ar×v(j) ・・・(式6)
必要な単位吐出量r(j)が算出されると、パラメータ決定部602は、対象変動情報関数Hを参照して、算出された単位吐出量r(j)を与える駆動周波数Fの値を特定する。すなわち、その駆動周波数Fの値に、これと対応するドロップマスMの値(すなわち、対象変動情報関数Hにおいてその駆動周波数Fの値に対して与えられるドロップマスMの値)を乗じた値が、単位吐出量r(j)となるような駆動周波数の値を特定する。そして、特定された駆動周波数Fの値を、入力値v(j)と対になる駆動周波数f(j)として取得する。
【0143】
入力値v(j)と対になる駆動周波数f(j)が取得されると、パラメータ決定部602は、当該取得された駆動周波数f(j)を、塗布処理に係るパラメータに決定する(ステップS60)。すなわち、取得された駆動周波数fを、塗布処理において塗布ヘッド31を制御する制御信号Qの駆動周波数Fの値に決定する。これにより、塗布処理に係るパラメータ(搬送速度Vの値、駆動周波数Fの値)がそれぞれ決定されることになる。
【0144】
なお、ここでも、パラメータ決定部602が塗布処理のパラメータ(駆動周波数Fの値、搬送速度Vの値)を決定すると、塗布処理制御部601が薬液塗布装置1の各部を制御することにより、決定されたパラメータで塗布処理が開始される。また、パラメータ決定部602は、塗布処理が実行されている間にオペレータから、駆動周波数Fの変更指示、あるいは、搬送速度Vの変更指示を受け付けると、上記のステップS53〜ステップS60を実行することによりパラメータを再決定する。
【0145】
上記の態様によると、オペレータが入力した値を塗布処理における制御信号Qの駆動周波数Fとして採用するので、オペレータが所望するとおりの態様で塗布処理を行うことができる。また、オペレータが入力した値を、塗布処理において塗布ヘッド31と基材シート90とを相対的に移動させる相対移動速度(具体的には、搬送速度V)として採用するので、オペレータが所望するとおりの態様で塗布処理を行うことができる。
【0146】
<7.その他の変形例>
上記の実施の形態に係る薬液塗布装置1の各構成要素は、上記に説明した態様に限らない。例えば、上記の各実施の形態においては、制御部60はCPU61を備える構成としたが、これを例えばFPGAに代えてもよい。
【0147】
また、上記の実施の形態においては、塗布ヘッド31において液滴を吐出する方式として、積層ピエゾドロップオンデマンド方式のインクジェットヘッドを用いていたが、液滴を吐出する方式はこれに限定されるものではなく、制御信号Qを印加することにより微小液滴を生成して噴出するものであればよい。
【0148】
また、上記の実施の形態に係る薬液塗布装置1においては、基材シート90を塗布ヘッド31に対して相対的に移動させることによって、基材シート90と塗布ヘッド31とを相対的に移動させていたが、基材シート90を動かさずに、基材シート90に対して塗布ヘッド31を相対的に移動させることによって、基材シート90と塗布ヘッド31とを相対的に移動させてもよい。
【0149】
また、上記の実施の形態に係る薬液塗布装置1において、塗布ユニット30が、塗布ヘッド31を複数個備えてもよい。1個の塗布ユニット30に複数個の塗布ヘッド31を設けることによって、解像度を高めることができる。例えば、300dpiの塗布ヘッド31をそのノズルが互い違いになるように配置すれば、600dpiの解像度を実現することができる。また、薬液塗布装置1において、1以上の塗布ヘッド31を備える塗布ユニット30を複数個設けてもよい。
【0150】
また、上記の実施の形態に係る薬液塗布装置1は、粘着剤91が積層された支持体92上に供給された基材シート90上に、薬液を塗布する構成であったが、粘着剤91に直接薬液を塗布して、粘着剤91に薬液を含浸させる構成であってもよい。この場合、粘着剤(粘着層)91は、ゴム系粘着剤、ビニル系粘着剤、アクリル系粘着剤等とする。
【符号の説明】
【0151】
1 薬液塗布装置
10 搬送機構
31 塗布ヘッド
311 ノズル
320 積層圧電素子
60 制御部
601 塗布処理制御部
602 パラメータ決定部
90 基材シート
95 薬剤層
【特許請求の範囲】
【請求項1】
駆動素子が設けられたノズルを備える塗布ヘッドから、前記塗布ヘッドに対して相対的に移動する媒体に向けて薬剤を含む薬液の液滴を吐出させることにより、前記媒体に前記薬液を塗布する薬液塗布方法であって、
a)前記駆動素子に与える制御信号の周波数の変化に伴う、前記ノズルから吐出される液滴量の変動情報を取得する工程と、
b)塗布処理において前記塗布ヘッドと前記媒体とを相対的に移動させる相対移動速度と、当該塗布処理において前記駆動素子に与える制御信号の周波数とを、前記変動情報を用いて決定する工程と、
c)前記b)工程で決定された相対移動速度で前記塗布ヘッドと前記媒体とを相対的に移動させつつ、前記b)工程で決定された周波数の制御信号を前記駆動素子に与えて前記ノズルから前記媒体に向けて前記薬液の液滴を吐出させることによって、塗布処理を実行させる工程と、
を備える薬液塗布方法。
【請求項2】
請求項1に記載の薬液塗布方法であって、
前記変動情報が、
周波数の複数の代表値のそれぞれと、周波数を当該代表値とした制御信号を前記駆動素子に与えた場合に前記ノズルから吐出される液滴量とを対応付けて記憶したテーブルの形で保持されており、
前記b)工程において、
前記複数の代表値のそれぞれについて、周波数を当該代表値として塗布処理を行う場合に前記媒体に目標塗布量の薬液を塗布可能な相対移動速度の値を前記変動情報に基づいて算出し、当該算出された値を当該代表値と対にしてパラメータ候補として取得し、
前記複数の代表値に基づいて取得された複数の前記パラメータ候補のうち、オペレータにより選択された一のパラメータ候補において対にされている前記代表値と前記算出された値とを、前記塗布処理における前記周波数と前記相対移動速度とにそれぞれ決定する、
薬液塗布方法。
【請求項3】
請求項1または2に記載の薬液塗布方法であって、
前記変動情報が、
周波数の複数の代表値のそれぞれと、周波数を当該代表値とした制御信号を前記駆動素子に与えた場合に前記ノズルから吐出される液滴量とを対応付けて記憶したテーブルの形で保持されており、
前記b)工程において、
前記複数の代表値のうち、オペレータが周波数の値として選択した一の代表値について、周波数を当該代表値として塗布処理を行う場合に前記媒体に目標塗布量の薬液を塗布可能な相対移動速度の値を前記変動情報に基づいて算出し、
オペレータにより選択された前記代表値と前記算出された値とを、前記塗布処理における前記周波数と前記相対移動速度とにそれぞれ決定する、
薬液塗布方法。
【請求項4】
請求項1から3のいずれかに記載の薬液塗布方法であって、
d)オペレータが目標塗布量の変更を指示した場合に、
周波数を現状の設定値のままとしつつ前記媒体に指示された新たな目標塗布量の薬液を塗布可能な相対移動速度の値を算出し、当該算出された値を前記塗布処理における新たな相対移動速度に再決定する工程と、
e)前記駆動素子に与える制御信号の周波数を変化させずに前記ノズルから前記媒体に向けて前記薬液の液滴を吐出させつつ、前記d)工程で再決定された前記新たな相対移動速度で前記塗布ヘッドと前記媒体とを相対的に移動させることによって、前記塗布処理を実行させる工程と、
を備える薬液塗布方法。
【請求項5】
請求項1または4に記載の薬液塗布方法であって、
前記変動情報が、
前記駆動素子に与える制御信号の周波数の変化に伴う、前記ノズルから吐出される液滴量の変動を表す関数の形で保持されており、
前記b)工程において、
オペレータが周波数の値として入力した値について、周波数を当該入力値として塗布処理を行う場合に前記媒体に目標塗布量の薬液を塗布可能な相対移動速度の値を前記変動情報に基づいて算出し、
前記入力値と前記算出された値とを、前記塗布処理における前記周波数と前記相対移動速度とにそれぞれ決定する、
薬液塗布方法。
【請求項6】
請求項1、4、5のいずれかに記載の薬液塗布方法であって、
前記変動情報が、
前記駆動素子に与える制御信号の周波数の変化に伴う、前記ノズルから吐出される液滴量の変動を表す関数の形で保持されており、
前記b)工程において、
オペレータが相対移動速度の値として入力した値について、相対移動速度を前記入力値として塗布処理を行う場合に前記媒体に目標塗布量の薬液を塗布可能な制御信号の周波数の値を前記変動情報に基づいて算出し、
前記算出された値と前記入力値とを、前記塗布処理における前記周波数と前記相対移動速度とにそれぞれ決定する、
薬液塗布方法。
【請求項7】
媒体に向けて、駆動素子が設けられたノズルから薬剤を含む薬液を液滴として吐出する塗布ヘッドと、
前記塗布ヘッドと前記媒体とを相対的に移動させる相対移動機構と、
前記駆動素子に与える制御信号の周波数の変化に伴う、前記ノズルから吐出される液滴量の変動情報を記憶する変動情報記憶部と、
塗布処理に先立って、当該塗布処理において前記塗布ヘッドと前記媒体とを相対的に移動させる相対移動速度と、当該塗布処理において前記駆動素子に与える制御信号の周波数とを、前記変動情報を用いて決定するパラメータ決定部と、
前記相対移動機構を制御して、前記パラメータ決定部により決定された相対移動速度で前記塗布ヘッドと前記媒体とを相対的に移動させつつ、前記パラメータ決定部により決定された周波数の制御信号を前記駆動素子に与えて前記ノズルから前記媒体に向けて前記薬液の液滴を吐出させることによって、塗布処理を実行させる塗布処理制御部と、
を備える薬液塗布装置。
【請求項8】
請求項7に記載の薬液塗布装置であって、
前記変動情報が、
周波数の複数の代表値のそれぞれと、周波数を当該代表値とした制御信号を前記駆動素子に与えた場合に前記ノズルから吐出される液滴量とを対応付けて記憶したテーブルの形で保持されており、
前記パラメータ決定部が、
前記複数の代表値のそれぞれについて、周波数を当該代表値として塗布処理を行う場合に前記媒体に目標塗布量の薬液を塗布可能な相対移動速度の値を前記変動情報に基づいて算出し、当該算出された値を当該代表値と対にしてパラメータ候補として取得し、
前記複数の代表値に基づいて取得された複数の前記パラメータ候補のうち、オペレータにより選択された一のパラメータ候補において対にされている前記代表値と前記算出された値とを、前記塗布処理における前記周波数と前記相対移動速度とにそれぞれ決定する、
薬液塗布装置。
【請求項9】
請求項7または8に記載の薬液塗布装置であって、
前記変動情報が、
周波数の複数の代表値のそれぞれと、周波数を当該代表値とした制御信号を前記駆動素子に与えた場合に前記ノズルから吐出される液滴量とを対応付けて記憶したテーブルの形で保持されており、
前記パラメータ決定部が、
前記複数の代表値のうち、オペレータが周波数の値として選択した一の代表値について、周波数を当該代表値として塗布処理を行う場合に前記媒体に目標塗布量の薬液を塗布可能な相対移動速度の値を前記変動情報に基づいて算出し、
オペレータにより選択された前記代表値と前記算出された値とを、前記塗布処理における前記周波数と前記相対移動速度とにそれぞれ決定する、
薬液塗布装置。
【請求項10】
請求項7から9のいずれかに記載の薬液塗布装置であって、
前記パラメータ決定部が、
オペレータが前記目標塗布量の変更を指示した場合に、
周波数を現状の設定値のままとしつつ前記媒体に指示された新たな目標塗布量の薬液を塗布可能な相対移動速度の値を算出し、当該算出された値を前記塗布処理における新たな相対移動速度に再決定し、
前記塗布処理制御部が、
前記駆動素子に与える制御信号の周波数を変化させずに前記ノズルから前記媒体に向けて前記薬液の液滴を吐出させつつ、前記パラメータ決定部が再決定した前記新たな相対移動速度で前記塗布ヘッドと前記媒体とを相対的に移動させることによって、前記塗布処理を実行させる、
薬液塗布装置。
【請求項11】
請求項7または10に記載の薬液塗布装置であって、
前記変動情報が、
前記駆動素子に与える制御信号の周波数の変化に伴う、前記ノズルから吐出される液滴量の変動を表す関数の形で保持されており、
前記パラメータ決定部が、
オペレータが周波数の値として入力した値について、周波数を当該入力値として塗布処理を行う場合に前記媒体に目標塗布量の薬液を塗布可能な相対移動速度の値を前記変動情報に基づいて算出し、
前記入力値と前記算出された値とを、前記塗布処理における前記周波数と前記相対移動速度とにそれぞれ決定する、
薬液塗布装置。
【請求項12】
請求項7、10、11のいずれかに記載の薬液塗布装置であって、
前記変動情報が、
前記駆動素子に与える制御信号の周波数の変化に伴う、前記ノズルから吐出される液滴量の変動を表す関数の形で保持されており、
前記パラメータ決定部が、
オペレータが相対移動速度の値として入力した値について、相対移動速度を前記入力値として塗布処理を行う場合に前記媒体に目標塗布量の薬液可能な前記制御信号の周波数の値を前記変動情報に基づいて算出し、
前記算出された値と前記入力値とを、前記塗布処理における前記周波数と前記相対移動速度とにそれぞれ決定する、
薬液塗布装置。
【請求項1】
駆動素子が設けられたノズルを備える塗布ヘッドから、前記塗布ヘッドに対して相対的に移動する媒体に向けて薬剤を含む薬液の液滴を吐出させることにより、前記媒体に前記薬液を塗布する薬液塗布方法であって、
a)前記駆動素子に与える制御信号の周波数の変化に伴う、前記ノズルから吐出される液滴量の変動情報を取得する工程と、
b)塗布処理において前記塗布ヘッドと前記媒体とを相対的に移動させる相対移動速度と、当該塗布処理において前記駆動素子に与える制御信号の周波数とを、前記変動情報を用いて決定する工程と、
c)前記b)工程で決定された相対移動速度で前記塗布ヘッドと前記媒体とを相対的に移動させつつ、前記b)工程で決定された周波数の制御信号を前記駆動素子に与えて前記ノズルから前記媒体に向けて前記薬液の液滴を吐出させることによって、塗布処理を実行させる工程と、
を備える薬液塗布方法。
【請求項2】
請求項1に記載の薬液塗布方法であって、
前記変動情報が、
周波数の複数の代表値のそれぞれと、周波数を当該代表値とした制御信号を前記駆動素子に与えた場合に前記ノズルから吐出される液滴量とを対応付けて記憶したテーブルの形で保持されており、
前記b)工程において、
前記複数の代表値のそれぞれについて、周波数を当該代表値として塗布処理を行う場合に前記媒体に目標塗布量の薬液を塗布可能な相対移動速度の値を前記変動情報に基づいて算出し、当該算出された値を当該代表値と対にしてパラメータ候補として取得し、
前記複数の代表値に基づいて取得された複数の前記パラメータ候補のうち、オペレータにより選択された一のパラメータ候補において対にされている前記代表値と前記算出された値とを、前記塗布処理における前記周波数と前記相対移動速度とにそれぞれ決定する、
薬液塗布方法。
【請求項3】
請求項1または2に記載の薬液塗布方法であって、
前記変動情報が、
周波数の複数の代表値のそれぞれと、周波数を当該代表値とした制御信号を前記駆動素子に与えた場合に前記ノズルから吐出される液滴量とを対応付けて記憶したテーブルの形で保持されており、
前記b)工程において、
前記複数の代表値のうち、オペレータが周波数の値として選択した一の代表値について、周波数を当該代表値として塗布処理を行う場合に前記媒体に目標塗布量の薬液を塗布可能な相対移動速度の値を前記変動情報に基づいて算出し、
オペレータにより選択された前記代表値と前記算出された値とを、前記塗布処理における前記周波数と前記相対移動速度とにそれぞれ決定する、
薬液塗布方法。
【請求項4】
請求項1から3のいずれかに記載の薬液塗布方法であって、
d)オペレータが目標塗布量の変更を指示した場合に、
周波数を現状の設定値のままとしつつ前記媒体に指示された新たな目標塗布量の薬液を塗布可能な相対移動速度の値を算出し、当該算出された値を前記塗布処理における新たな相対移動速度に再決定する工程と、
e)前記駆動素子に与える制御信号の周波数を変化させずに前記ノズルから前記媒体に向けて前記薬液の液滴を吐出させつつ、前記d)工程で再決定された前記新たな相対移動速度で前記塗布ヘッドと前記媒体とを相対的に移動させることによって、前記塗布処理を実行させる工程と、
を備える薬液塗布方法。
【請求項5】
請求項1または4に記載の薬液塗布方法であって、
前記変動情報が、
前記駆動素子に与える制御信号の周波数の変化に伴う、前記ノズルから吐出される液滴量の変動を表す関数の形で保持されており、
前記b)工程において、
オペレータが周波数の値として入力した値について、周波数を当該入力値として塗布処理を行う場合に前記媒体に目標塗布量の薬液を塗布可能な相対移動速度の値を前記変動情報に基づいて算出し、
前記入力値と前記算出された値とを、前記塗布処理における前記周波数と前記相対移動速度とにそれぞれ決定する、
薬液塗布方法。
【請求項6】
請求項1、4、5のいずれかに記載の薬液塗布方法であって、
前記変動情報が、
前記駆動素子に与える制御信号の周波数の変化に伴う、前記ノズルから吐出される液滴量の変動を表す関数の形で保持されており、
前記b)工程において、
オペレータが相対移動速度の値として入力した値について、相対移動速度を前記入力値として塗布処理を行う場合に前記媒体に目標塗布量の薬液を塗布可能な制御信号の周波数の値を前記変動情報に基づいて算出し、
前記算出された値と前記入力値とを、前記塗布処理における前記周波数と前記相対移動速度とにそれぞれ決定する、
薬液塗布方法。
【請求項7】
媒体に向けて、駆動素子が設けられたノズルから薬剤を含む薬液を液滴として吐出する塗布ヘッドと、
前記塗布ヘッドと前記媒体とを相対的に移動させる相対移動機構と、
前記駆動素子に与える制御信号の周波数の変化に伴う、前記ノズルから吐出される液滴量の変動情報を記憶する変動情報記憶部と、
塗布処理に先立って、当該塗布処理において前記塗布ヘッドと前記媒体とを相対的に移動させる相対移動速度と、当該塗布処理において前記駆動素子に与える制御信号の周波数とを、前記変動情報を用いて決定するパラメータ決定部と、
前記相対移動機構を制御して、前記パラメータ決定部により決定された相対移動速度で前記塗布ヘッドと前記媒体とを相対的に移動させつつ、前記パラメータ決定部により決定された周波数の制御信号を前記駆動素子に与えて前記ノズルから前記媒体に向けて前記薬液の液滴を吐出させることによって、塗布処理を実行させる塗布処理制御部と、
を備える薬液塗布装置。
【請求項8】
請求項7に記載の薬液塗布装置であって、
前記変動情報が、
周波数の複数の代表値のそれぞれと、周波数を当該代表値とした制御信号を前記駆動素子に与えた場合に前記ノズルから吐出される液滴量とを対応付けて記憶したテーブルの形で保持されており、
前記パラメータ決定部が、
前記複数の代表値のそれぞれについて、周波数を当該代表値として塗布処理を行う場合に前記媒体に目標塗布量の薬液を塗布可能な相対移動速度の値を前記変動情報に基づいて算出し、当該算出された値を当該代表値と対にしてパラメータ候補として取得し、
前記複数の代表値に基づいて取得された複数の前記パラメータ候補のうち、オペレータにより選択された一のパラメータ候補において対にされている前記代表値と前記算出された値とを、前記塗布処理における前記周波数と前記相対移動速度とにそれぞれ決定する、
薬液塗布装置。
【請求項9】
請求項7または8に記載の薬液塗布装置であって、
前記変動情報が、
周波数の複数の代表値のそれぞれと、周波数を当該代表値とした制御信号を前記駆動素子に与えた場合に前記ノズルから吐出される液滴量とを対応付けて記憶したテーブルの形で保持されており、
前記パラメータ決定部が、
前記複数の代表値のうち、オペレータが周波数の値として選択した一の代表値について、周波数を当該代表値として塗布処理を行う場合に前記媒体に目標塗布量の薬液を塗布可能な相対移動速度の値を前記変動情報に基づいて算出し、
オペレータにより選択された前記代表値と前記算出された値とを、前記塗布処理における前記周波数と前記相対移動速度とにそれぞれ決定する、
薬液塗布装置。
【請求項10】
請求項7から9のいずれかに記載の薬液塗布装置であって、
前記パラメータ決定部が、
オペレータが前記目標塗布量の変更を指示した場合に、
周波数を現状の設定値のままとしつつ前記媒体に指示された新たな目標塗布量の薬液を塗布可能な相対移動速度の値を算出し、当該算出された値を前記塗布処理における新たな相対移動速度に再決定し、
前記塗布処理制御部が、
前記駆動素子に与える制御信号の周波数を変化させずに前記ノズルから前記媒体に向けて前記薬液の液滴を吐出させつつ、前記パラメータ決定部が再決定した前記新たな相対移動速度で前記塗布ヘッドと前記媒体とを相対的に移動させることによって、前記塗布処理を実行させる、
薬液塗布装置。
【請求項11】
請求項7または10に記載の薬液塗布装置であって、
前記変動情報が、
前記駆動素子に与える制御信号の周波数の変化に伴う、前記ノズルから吐出される液滴量の変動を表す関数の形で保持されており、
前記パラメータ決定部が、
オペレータが周波数の値として入力した値について、周波数を当該入力値として塗布処理を行う場合に前記媒体に目標塗布量の薬液を塗布可能な相対移動速度の値を前記変動情報に基づいて算出し、
前記入力値と前記算出された値とを、前記塗布処理における前記周波数と前記相対移動速度とにそれぞれ決定する、
薬液塗布装置。
【請求項12】
請求項7、10、11のいずれかに記載の薬液塗布装置であって、
前記変動情報が、
前記駆動素子に与える制御信号の周波数の変化に伴う、前記ノズルから吐出される液滴量の変動を表す関数の形で保持されており、
前記パラメータ決定部が、
オペレータが相対移動速度の値として入力した値について、相対移動速度を前記入力値として塗布処理を行う場合に前記媒体に目標塗布量の薬液可能な前記制御信号の周波数の値を前記変動情報に基づいて算出し、
前記算出された値と前記入力値とを、前記塗布処理における前記周波数と前記相対移動速度とにそれぞれ決定する、
薬液塗布装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【公開番号】特開2012−170889(P2012−170889A)
【公開日】平成24年9月10日(2012.9.10)
【国際特許分類】
【出願番号】特願2011−35570(P2011−35570)
【出願日】平成23年2月22日(2011.2.22)
【出願人】(000207551)大日本スクリーン製造株式会社 (2,640)
【Fターム(参考)】
【公開日】平成24年9月10日(2012.9.10)
【国際特許分類】
【出願日】平成23年2月22日(2011.2.22)
【出願人】(000207551)大日本スクリーン製造株式会社 (2,640)
【Fターム(参考)】
[ Back to top ]