
薬液投与装置及び閉塞検出方法

【課題】本発明は、装置全体を小型化する。
【解決手段】本発明は、ピストン11が予め設定された往復時間T1に基づいて設定される上限時間T2以内に最引戻位置から最押込位置まで移動することができないことを検出することにより穿刺部5又は流路部13の閉塞を検出するので、正確に閉塞を検出することができると共に、圧力センサを用いる必要がない分、装置全体を小型化することができる。
【解決手段】本発明は、ピストン11が予め設定された往復時間T1に基づいて設定される上限時間T2以内に最引戻位置から最押込位置まで移動することができないことを検出することにより穿刺部5又は流路部13の閉塞を検出するので、正確に閉塞を検出することができると共に、圧力センサを用いる必要がない分、装置全体を小型化することができる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、薬液投与装置及び閉塞検出方法に関し、例えば薬液を体内に投与する場合に適用して好適なものである。
【背景技術】
【0002】
従来、薬液(インスリン)を投与する装置として、使用者の皮膚に付着させて用いられる携帯型の装置であって、薬液容器である外筒内に充填された薬液をシール部材(ピストン)を介して押し出すことにより体内に投与する、所謂シリンジポンプ型の装置が提案されている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特表2010−501283号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、上述したような薬液を投与する装置では、外筒内に充填された薬液が変性したり、使用者の体内に挿入されたカニューレが変形したりする等して薬液が流れる流路が閉塞し、薬液が使用者に正常に投与できなくなる可能性がある。
【0005】
流路が閉塞したことを使用者に通知するため、外筒内に充填された薬液を押し出すピストンを動作させるモーターの電流を所定間隔ごとに検出するようになされた装置がある。
【0006】
このような装置では、電流が所定の閾値以上であった場合には外筒内の圧力が一定値以上になった、すなわち薬液が正常に送出できていないとして作動を中止して使用者に通知するようになされた装置が提案されている。
【0007】
このような装置ではピストンを動作させるモーターの電流に基づいて外筒内の圧力を検出しているため、外筒及びピストンの摩擦力が増加することでモーターの負荷が増加し、電流が増加した場合には外筒内の圧力を正確に検出できなくなる。
【0008】
これに対して、薬液が流れる流路の圧力を正確に検出するために、該流路に圧力センサを用いることも考えられる。しかしながら、使用者に長時間に保持させる装置ではより小型化することが求められるため、圧力センサを設けることが小型化することの弊害となる。
【0009】
本発明は以上の点を考慮してなされたもので、小型化し得る薬液投与装置及び閉塞検出方法を提案しようとするものである。
【課題を解決するための手段】
【0010】
かかる課題を解決するため本発明は、使用者の体内に薬液を投与するための薬液投与装置であって、該薬液を貯蔵する薬液貯蔵部と、薬液貯蔵部から使用者の生体内へ薬液を送液する流路を形成する流路部と、流路部の途中に設けられたシリンダ部と、シリンダ部内を摺動するピストンと、ピストンをシリンダ部内で摺動させる駆動部と、ピストンを制御する駆動制御部と、を有し、流路部は、薬液貯蔵部とシリンダ 部とを接続する流入路と、シリンダ部と使用者の生体へと接続される流出路とから成り、流路部は、薬液貯蔵部からシリンダ部へと薬液が流れるように流入路上に設けられた該薬液の流れる方向を制御する第1制御部と、シリンダ部から外部使用者の生体内へ薬液が流れるように、流出路上に設けられた該薬液の流れる方向を制限する第2の制限部とを有し、駆動制御部は、ピストンが所定時間にシリンダ部内を最も引戻された位置から最も押込まれた位置への移動を検知するピストン検知部を備え、検知部がピストンの所定時間内の移動を移動できなかった場合、流路部が閉塞していることを検出する閉塞検出部とを有している。
【0011】
また本発明は、使用者の体内に薬液を投与する薬液投与装置における閉塞検出方法であって、薬液を貯蔵する薬液貯蔵部から使用者の体内へ送液する流路を形成する流路部に一端が接続されるシリンダ部の内部を摺動するピストンがあり、ピストンがシリンダ内の最も引戻された位置から最も押込まれた位置へ移動する際に薬液を流路部を介して使用者の体内に送液するようピストンを駆動する駆動部を介して、所定時間でピストンが最も引戻された位置から最も押込まれた位置へ移動するよう駆動部を制御する駆動制御ステップと、所定時間に基づいて設定される時間でピストンが最も引戻された位置から最も押込まれた位置へ移動できなかった場合、流路部が閉塞していることを検出する閉塞検出ステップとを有する。
【0012】
これにより、ピストンが最も引戻された位置から最も押込まれた位置に設定される時間で移動できなかったことにより閉塞を検出することができるので、簡易な構成で閉塞を正確に検出できる。
【発明の効果】
【0013】
本発明によれば、ピストンが最も引戻された位置から最も押込まれた位置に設定される時間で移動できなかったことにより閉塞を検出することができるので、簡易な構成で閉塞を正確に検出でき、かくして装置全体を小型化することができる。
【図面の簡単な説明】
【0014】
【図1】薬液投与装置の構成を示す略線図である。
【図2】薬液投与装置の分解斜視図である。
【図3】送出部による薬液の送出の様子を示す略線図である。
【図4】第1の実施の形態における駆動部の構成を示す略線図である。
【図5】第1の実施の形態における駆動部の断面図である。
【図6】振動体の変形の様子を示す略線図である。
【図7】薬液投与装置の電気的構成を示す略線図である。
【図8】CPUの機能的構成の構成を示す略線図である。
【図9】第1の実施の形態における閉塞検出処理手順を示すフローチャートである。
【図10】第2の実施の形態における駆動部の構成を示す略線図である。
【図11】第2の実施の形態における閉塞検出処理手順を示すフローチャートである。
【発明を実施するための形態】
【0015】
以下に、図面について、本発明の一実施の形態を詳述する。
【0016】
〈1.第1の実施の形態〉
〔1−1.薬剤投与装置の構成〕
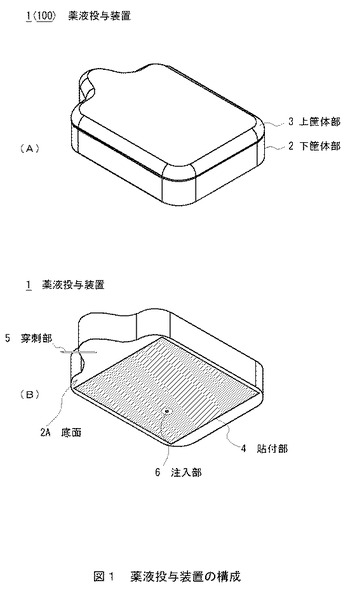
図1に示すように、薬液投与装置1は、使用者の皮膚に貼り付けることにより保持されて使用される携帯型の装置であり、上側が開口し内部に空間が設けられた下筐体部2と該下筐体部2の開口に嵌合する上筐体部3により扁平な略直方体形状に形成される。
【0017】
薬液投与装置1の大きさは、使用者の皮膚にはりつけることができる程度にまで小型化されていればよいが、例えば横32mm、縦44mm、高さ11mm略直方体形状が挙げられる。
【0018】
下筐体部2には、両面テープ等でなる貼付部4が底面2Aに設けられる。薬液投与装置1は、接着部4が使用者の皮膚に貼り付けられることにより該使用者に保持される。
【0019】
薬液投与装置1は、下筐体部2の底面2Aに、内部に充填された薬液を使用者の体内へ投与するために該使用者の皮膚を穿刺するための針やカニューレ等でなる穿刺部5と、内部に設けられた薬液貯蔵部(図2)に薬液を注入するための注入路である注入部6とが設けられる。
【0020】
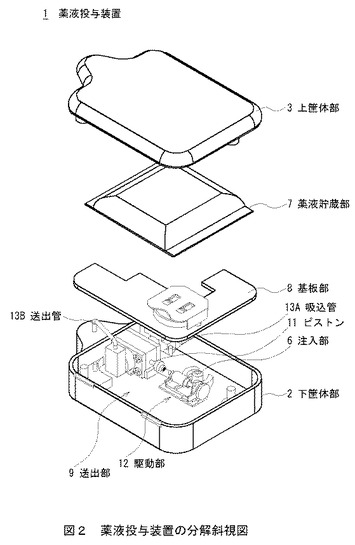
薬液投与装置1は、図2に示すように、下筐体部2と上筐体部3とで形成される空間に注入部6、薬液貯蔵部7、基板部8及び送出部9が配される。
【0021】
薬液貯蔵部7は、柔軟性を有する材料より形成された容器である。薬液貯蔵部7を構成する材質としては、例えば、ポリオレフィンを含むものであるのが好ましい。軟質バッグ2の形成材料として、特に好ましいものとして、ポリエチレンまたはポリプロピレンに、スチレン−ブタジエン共重合体やスチレン−エチレン−ブチレン−スチレンブロック共重合体等のスチレン系熱可塑性エラストマーあるいはエチレン−プロピレン共重合体やエチレン−ブテン共重合体,プロピレン−αオレフィン共重合体等のオレフィン系熱可塑性エラストマーをブレンドし柔軟化した軟質樹脂を挙げることができる。薬液貯蔵部7の容器の容量は、特に限定されるものではないが、小型化などを考慮するとたとえば2mLの容積のものが挙げられる。そして、薬液が注入部6を介して外部から充填される。薬剤貯蔵部7に貯蔵される薬液としては、例えばインスリンや各種ホルモン、モルヒネなどの鎮痛薬、あるいは抗炎症薬剤などが挙げられる。基板部8は、電源電力を供給する電源部44(図7)や送出部9を制御する回路などが配される。
【0022】
送出部9は、図2及び図3に示すように、ピストン11、CPU41(図7)の制御に応じて該ピストン11を往復駆動させる駆動部12、及び薬液貯蔵部7から穿刺部5まで薬液が流れる流路を形成する流路部13、一端が流路部13に接続され他端から挿入されるピストン11が内部で摺動されるシリンダ14、流路部13の流路の開閉を行い薬液の流れを制限する制限部15を含む構成とされる。
【0023】
ピストン11は、駆動部12により駆動されてシリンダ14内で所定のストロークで摺動する。ピストン11の材質としては、例えば、ステンレス鋼、銅合金、アルミ合金、チタン材、ポリプロピレンやポリカーカーボネートなどの熱可塑性エラストマー等が挙げられ、その直径は例えば、0.8mm程度である。また、ピストン11はシリンダ14内を摺動することにより一定量の薬液を送液するが、そのストロークは例えば2mm程度である。
【0024】
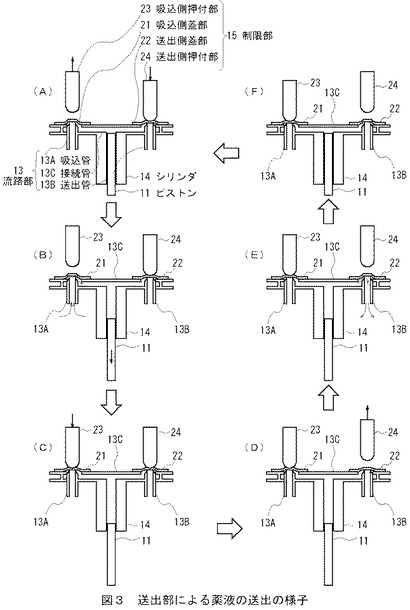
流路部13は、流入路を形成する吸込管13A、流出路を形成する送出管13B及びシリンダ部へと接続するための接続管13Cにより構成される。吸込管13Aは、一端が薬剤貯蔵部7に接続され、他端が接続管13Cと接続される。送出管13Bは、一端が穿刺部5と接続され、他端が接続管13Cと接続される。接続管13Cは、端部がそれぞれ吸込管13A及び送出管13Bと接続され、中央部分にシリンダ14が接続される。
【0025】
制限部15は、第1の制限部を構成する吸込側蓋部21及び吸込側押付部23、第2の制限部を構成する送出側蓋部22及び送出側押付部24により構成される。
【0026】
吸込側蓋部21及び送出側蓋部22は、弾性変形可能な部材でなり、吸込管13A及び送出管13Bのそれぞれ他端に対して所定の間隔だけ離間して配される。吸込側押付部23及び送出側押付部24は、CPU41(図7)の制御に応じて動作するアクチュエータであり、吸込側蓋部21及び送出側蓋部22を吸込管13A及び送出管13Bの他端に押し当てることにより吸込管13A及び送出管13Bの他端をそれぞれ塞ぐ。
【0027】
シリンダ14は、ピストン11の直径より大きな内径で、一端が接続管13Cと接続され、他端側からピストン11が挿入され内部で摺動する。シリンダ14とピストン11との直径の差は、例えば0.01mm程度である。
【0028】
送出部9は、薬液貯蔵部7から外部に薬液を送出する際、図3に示すように、ピストン11が最も押込まれる位置(以下、最押込位置とも呼ぶ)にきた時、吸込側押付部23を吸込側蓋部21から離して吸込管13A及び接続管13Cの間の流路を開放すると共に、送出側押付部24により送出側蓋部22を送出管13Bの他端に押し付けて送出管13B及び接続管13Cの間の流路を塞ぐ(図3(A))。
【0029】
そして送出部9は、ピストン11を最押込位置から最も引き戻される位置(以下、これを最引戻位置とも呼ぶ)までシリンダ14内で摺動させ(以下、この摺動方向を引戻方向とも呼ぶ)、薬液貯蔵部7に貯蔵された薬液を吸込管13A及び接続管13Cを介してシリンダ14内に吸い出す(図3(B))。
【0030】
送出部9は、ピストン11が最引戻位置に移動されると、吸込側押付部23により吸込側蓋部21を吸込管13Aの他端に押し付けて吸込管13A及び接続管13Cの間の流路を塞ぎ(図3(C))、送出側押付部24を送出側蓋部22から離して送出管13B及び接続管13Cの間の流路を開放する(図3(D))。
【0031】
送出部9は、ピストン11を最引戻位置から最押込位置までシリンダ14内を摺動させ(以下、この摺動方向を押込方向とも呼ぶ)、シリンダ14の内部に吸い出された薬液を接続管13C、送出管13B及び穿刺部5を介して使用者の体内に送出する(図3(E)及び(F))。
【0032】
送出部9は、ピストン11を一往復させる動作(図3(A)〜(F))で約1μLの薬液を使用者の体内に投与でき、この動作を設定された周期及び間隔で繰り返し行うことにより、所望の投与速度及び投与量で薬液を使用者に投与できる。
【0033】
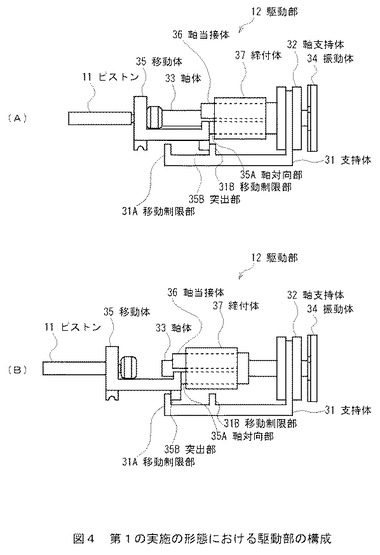
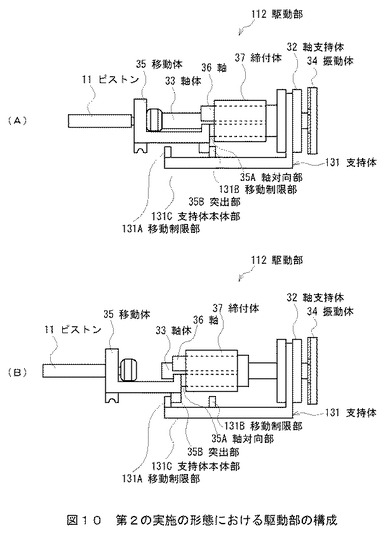
駆動部12は、図4及びその断面図である図5に示すように、支持体31、軸支持体32、軸体33、振動体34、移動体35、軸当接体36及び締付体37を含む構成とされる。
【0034】
支持体31は、導電性の部材でなり、その一端側に設けられた軸支持体32を介して駆動部12の各部を支持する。また支持体31は、対向する面同士が所定間隔(ピストン11のストローク及び突出部35Bの幅を合わせた距離)離れるようにして移動体35の方向に移動制限部31A及び31Bが突設されており、該移動制限部31A及び31Bによりピストン11の移動を制限する。また支持体31は、電気的に基板部8と接続される。
【0035】
軸支持体32は、絶縁性の部材でなり、軸体33が挿通される孔が設けられる。軸体33は、略円柱形状でなり、軸支持体32の孔に挿通されて軸方向に移動可能に支持される。軸体33の一端には、例えば電圧素子でなる振動体34が当接される。
【0036】
振動体34は、CPU41(図7)の制御に基づいて電圧が印加されることにより、中央部分が周辺部分に対して押し出されるように湾曲する。このとき湾曲する方向は印加される電圧の方向によって異なる。具体的には、例えば電圧を印加していないときは平面状になっており、(図6(A))、図6(B)の方向(この方向を仮に正方向とする)に電圧を印加することで軸体33を押し出すように変形し、図6(B)とは反対方向(この方向を仮に負方向とする)に電圧を印加することで軸体33を引き戻すように変形する(図6(C))。
【0037】
軸体33は、軸支持体32を挟んで振動体34とは反対側で移動体35及び軸当接体36に締付体37を介して囲まれるようにして所定の摩擦力で挟持される。
【0038】
移動体35は、導電性の部材でなり、軸当接体36と対向する軸対向部35Aとは反対側にピストン11が接続される。
【0039】
また移動体35は、支持体31の移動制限部31A及び31Bの間で、移動体35が移動した際に移動制限部31A及び31Bの対向するそれぞれの面に当接するように所定幅の突出部35Bが設けられる。また移動体35は、電気的に基板部8と接続される。
【0040】
駆動部12は、振動体34への印加電圧が緩やかに正方向に変化すると該振動体34が伸びて軸体33を押込方向に移動させる。このとき移動体35、軸当接体36、締付体37及びピストン11は、軸体33と移動体35及び軸当接体36との摩擦力により軸体33と共に押込方向に移動する。
【0041】
その後、駆動部12は、振動体34への印加電圧が急激に負方向に変化すると該振動体34が縮んで軸体33を引戻方向に移動させる。このとき移動体35、軸当接体36、締付体37及びピストン11は、慣性力が軸体33と移動体35及び軸当接体36との摩擦力に打ち勝つことにより軸体33が滑り、その位置に留まる。
【0042】
このようにして駆動部12は、この1回の動作でピストン11を押込方向に微小量移動させる。微小量としては、例えば約0.2μm程度である。駆動部12は、これを所定回数繰り返し行うことによりピストン11を最引戻位置から最押込位置まで移動させる。例えば、駆動部12を10000回移動させることにより、2mm移動させることができる。このとき駆動部12は、移動制限部31Aに突出部35Bが当接することにより最押込位置より押込方向にピストン11が移動することを防止できる。
【0043】
一方、駆動部12は、振動体34への印加電圧が急激に正方向に変化すると該振動体34が伸びて軸体33を押込方向に移動させる。このとき移動体35、軸当接体36、締付体37及びピストン11は、慣性力が軸体33と移動体35及び軸当接体36との摩擦力に打ち勝つことにより軸体33が滑り、その位置に留まる。
【0044】
駆動部12は、振動体34への印加電圧が緩やかに負方向に変化すると該振動体34が縮んで軸体33を引戻方向に移動させる。このとき移動体35、軸当接体36、締付体37及びピストン11は、軸体33と移動体35及び軸当接体36との摩擦力により軸体33と共に引戻方向に移動する。
【0045】
このようにして駆動部12は、この1回の動作でピストン11を引戻方向に微小量移動させる。微小量としては、たとえば約0.2μmである。駆動部12は、これを所定回数繰り返し行うことによりピストン11を最押込位置から最引戻位置まで移動させる。所定回数としては、たとえば10000回であり、これにより2mmピストン11を移動させることができる。このとき駆動部12は、移動制限部31Bに突出部35Bが当接することにより最引戻位置より引戻方向にピストン11が移動することを防止できる。
【0046】
〔1−2.薬液投与装置の電気的構成〕
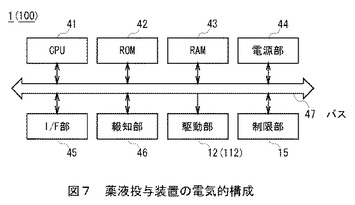
薬液投与装置1は、図7に示すように、CPU(Central Processing Unit)41、ROM(Read Only Memory)42、RAM(Random Access Memory)43、電源部44、インターフェース部(I/F部)45、報知部46、駆動部12及び制限部15がバス47を介して接続される。
【0047】
CPU41、ROM42、RAM43、電源部44及び報知部46は、基板部8上(図示せず)に配される。電源部44は電池が適応される。報知部46は、音声で報知するためのスピーカや、光で報知するためのLEDなどが適応される。
【0048】
インターフェース部45は、上筐体部3又は下筐体部2に配され使用者の入力命令を受け付けるボタン(図示せず)等が適応される。またインターフェース部45の代わりに無線による通信を行うためのアンテナ及び通信回路からなる通信部を搭載し、本ポンプとは別体となる操作部(図示せず)から無線通信による入力命令を受け付ける方式でもよい。
【0049】
CPU41は、ROM42に格納された基本プログラムをRAM43に読み出して実行することより全体を統括制御すると共に、ROM42に記憶された各種アプリケーションプログラムをRAM43に読み出して実行することにより各種処理を実行する。使用者は薬液投与装置1を操作し、制御部であるCPU61に指令を出すことで、CPU61は基本プログラムを読みだし、駆動部12及び制限部15を制御することで使用者へ薬剤が投与される。
【0050】
ところで上述したように、支持体31と移動体35は、絶縁体である軸支持体32を介して接続されているので、軸支持部32を介して電気的に接続されることはない。
【0051】
一方、支持体31及び移動体35はそれぞれ基板部8と電気的に接続されており、基板部8では支持体31及び移動体35が接触した際に電気が流れる回路が形成される。
【0052】
すなわち支持体31と移動体35は、移動体35の突起部35Aが支持体31の移動制限部31A又は31Bとに接触した場合に電気的に接続される。
【0053】
CPU41は、支持体31及び移動体35に電気が流れることを検出することにより、接触移動体35の突起部35Aが支持体31の移動制限部31A又は31Bに接触したことを検出することができる。
【0054】
〔1−3.閉塞検出処理〕
薬液投与装置1では、穿刺部5が使用者の体動などで変形したり、薬液などの薬液が変性するなどして穿刺部5や流路部13が閉塞し、薬液が使用者に正確に投与できなくなる可能性がある。
【0055】
そこでCPU41は、穿刺部5や流路部13が閉塞しているか否かを検出する閉塞検出処理を実行し、穿刺部5や流路部13の閉塞を検出する。
【0056】
CPU41は、ROM42に格納された閉塞検出アルゴリズムが搭載された送液プログラムをRAM43に展開し、処理を実行する。CPU41は、処理を実行する際、図8に示すように、設定部51、駆動制御部52、ピストン検知部53、閉塞検出部54及び報知制御部55として機能する。
【0057】
薬液投与装置1では、注入部6を介して外部から薬液貯蔵部7に薬液が充填された後、貼付部4が使用者の皮膚に貼り付けられると共に穿刺部3が使用者の皮膚に穿刺され、インターフェース部45を介して投与量及び投与速度が入力される。
【0058】
設定部51は、入力された投与量及びピストン11のボリュームストロークに基づいてピストン11の往復回数Nを算出する。例えば、投与量が2mLで、ピストン11のボリュームストロークが0.5μLの場合、設定部51はピストン11の往復回数Nを4000回と算出する。
【0059】
また、設定部51は、入力された投与速度及びピストン11のボリュームストロークに基づいてピストン11の往復時間T1を算出する。例えば、投与速度が1μL/sで、ピストン11のボリュームストロークが0.5μLの場合、設定部51はピストン11の往復時間T1を0.5sと算出する。
【0060】
従って薬液投与装置1では、穿刺部5や流路部13が閉塞していない場合、ピストン11を往復時間T1である0.5sで往復移動させることができる。
【0061】
しかしながら穿刺部5や流路部13が閉塞した場合、ピストン11を押込方向に移動させようとすると、シリンダ14内に引き出された薬液を押し出すことができず、シリンダ14内の内部圧力の上昇により引戻方向の力がピストン11に加わる。
【0062】
このため、駆動部12が振動体34に印可電圧が緩やかに増加させて軸体33と共に移動体35及び軸当接体36の摩擦力で押込方向にピストン11を移動させようとするが、該摩擦力よりもピストン11に加わる力が大きくなり、ピストン11の移動量が減少するか全く移動しなくなる。
【0063】
従って駆動部12は、穿刺部5や流路部13が閉塞していない場合はピストン11を往復時間T1の間に往復させるために充分間に合う時間(例えばT1の半分の時間)、で最引戻位置から最押込位置まで移動させることができるのに対して、穿刺部5や流路部13が閉塞した場合には往復時間T1内でのピストン11の往復に間に合うために必要な時間内に最引戻位置から最押込位置まで移動させることができなくなる。
【0064】
そこで設定部51は、ピストン11が最引戻位置から最押込位置まで移動するのにかかる時間に対して穿刺部5や流路部13が閉塞していると判断されるための上限の時間(以下、これを押込上限時間とも呼ぶ)T2を算出する。この押込上限時間T2は、例えば往復時間T1の半分の時間以上で往復時間T1未満(往復時間T1の0.5〜0.7倍程度)に設定される。上限時間T2を往復時間T1未満にすることで往復時間T1以内に閉塞状態を検出することができる。
【0065】
さらにピストンが最押込位置から最引戻位置まで移動するのにかかる時間に対して穿刺部5や流路部13が閉塞していると判断されるための上限の時間(以下、これを引戻上限時間とも呼ぶ)T3を算出する。引戻上限時間T3は往復時間T1から押込上限時間T2を減算した時間である。
【0066】
例えば、上限時間T2が往復時間T1の0.7倍に設定された場合、設定部51は押込上限時間T2を0.35s、引戻上限時間T3を0.15sと算出する。
【0067】
ところで、支持体31は導電性材料で一体形成されているので、支持体31と移動体35が電気的に接続されていることを検出するだけでは、突出部35Bが移動制限部31A又は31Bのどちらに接触しているのか判断することができない。
【0068】
そのため、突出部35Bが移動制限部31Bに接触している状態で駆動部12を駆動させると、ピストン11が全く移動していなくても支持体31と移動体35が接触しているので、移動体35が移動して突出部35Bが移動制限部31Aに接触したと誤検出してしまうことが考えられる。このとき、本来閉塞などによりピストンが全く動作していないのに対して、接触したと判断することで押込上限時間T2内にピストンが最押込位置に到達し、閉塞していないと判断ミスをしてしまうことになる。
【0069】
このような誤判断を防止するため、突出部35Bが移動制限部31A又は31Bに接触している状態から、押込上限時間T2未満でかつ引戻上限時間T3未満に、突出部35Bが移動制限部31A及び31Bから離れたことを確認することが必要となる。
【0070】
そこで設定部51は、突出部35Bが移動制限部31A又は31Bに接触している状態から離れたことを確認するための時間(以下、これを動作確認時間とも呼ぶ)T4を算出する。この動作確認時間T4は、押込上限時間T2未満でかつ引戻上限時間T3未満(例えば押込上限時間T2の0.2倍程度)に設定される。
【0071】
例えば、動作確認時間T4が押込上限時間T2の0.2倍に設定された場合、設定部51は動作確認時間T4を0.07sと算出する。
【0072】
駆動制御部52は、設定部51により算出された往復回数N及び往復時間T1でピストン11を移動させるよう駆動部12を制御し、駆動部12を介してピストン11の押込み動作を開始させる。なお、押込み動作開始の際、ピストン11は最引戻位置にあり、移動体制限部31Bと突出部35Bとが接触している場合について説明するが、ピストン11は最引戻位置にない場合には駆動制御部52の制御に基づいてピストン11を最引戻位置まで移動させてから押込み動作を開始させるようにしてもよい。
【0073】
ピストン検知部53は、駆動制御部52の制御に基づいて駆動部12がピストン11を最引戻位置から移動させ始めると、押込み動作開始から動作確認時間T4経過後に支持体31と移動体35が接触しているか否かを検出する。
【0074】
閉塞検出部54は、ピストン検知部53が押込み動作開始から動作確認時間T4経過後に支持体31と移動体35が接触していることを検出した場合、ピストン11が移動していないと判断する。このとき駆動制御部52は駆動部12の動作を停止させる。また報知制御部55は、報知部46を制御し、穿刺部5や流路部13が閉塞している旨を報知部46を介して使用者に通知する。
【0075】
一方、ピストン検知部53は、押込み動作開始から動作確認時間T4経過後に支持体31と移動体35が接触していないことを検出した場合、押込み動作開始から押込上限時間T2経過までに支持体31と移動体35が接触したかを検出する。
【0076】
閉塞検出部54は、支持体31と移動体35が接触したことを検出できずに押込み開始から押込上限時間T2が経過した場合、穿刺部5や流路部13が閉塞していると判断し、上述と同様に、駆動制御部52が駆動部12の動作を停止させ、また報知制御部55が穿刺部5や流路部13が閉塞している旨を報知部46を介して使用者に通知する。
【0077】
一方、閉塞検出部54は、押込み動作開始から押込上限時間T2までに支持体31と移動体35が接触したことを検出できた場合、ピストン11が最押込位置に移動していると判断する。
【0078】
そして駆動制御部52は、駆動部12を介してピストン11の引戻し動作を開始させる。
【0079】
ピストン検知部53は、ピストン11の押込み動作時と同様に引戻し動作開始から動作確認時間T4経過後に支持体31と移動体35が接触しているか否かを検出する。
【0080】
ピストン検知部53が引戻し開始から動作確認時間T4経過後に支持体31と移動体35が接触していることを検出した場合、駆動制御部52は駆動部12の動作を停止させ、報知制御部55は穿刺部5や流路部13が閉塞している旨を報知部46を介して使用者に通知する。
【0081】
一方、ピストン検知部53は、引戻し動作開始から動作確認時間T4経過後に支持体31と移動体35が接触していないことを検出した場合、引戻し開始から引戻上限時間T3までに支持体31と移動体35が接触したかを検出する。
【0082】
閉塞検出部54は、ピストン検知部53が引戻し動作開始から引戻上限時間T3までに支持体31と移動体35が接触したことを検出できなかった場合、ピストン11が移動していないと判断する。このとき駆動制御部52は駆動部12の動作を停止させ、報知制御部55は穿刺部5や流路部13が閉塞している旨を報知部46を介して使用者に通知する。
【0083】
駆動制御部52、ピストン検知部53、閉塞検出部54及び報知制御部55は、ピストン11を往復回数Nだけ往復移動させる間、上述した処理を繰り返し行う。駆動制御部52は、正常にピストン11を往復回数Nだけ往復移動させると駆動部12を停止させ処理を終了する。
【0084】
〔1−4.閉塞検出処理手順〕
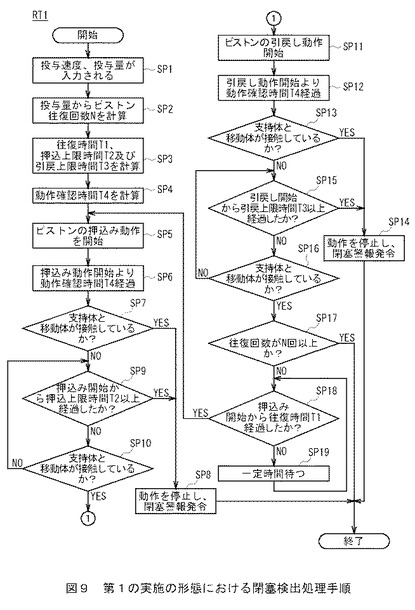
次に、上述した閉塞検出処理の手順について図9に示すルーチンRT1のフローチャートを用いて説明する。CPU41は、インターフェース部45を介して投与量及び投与速度が入力されると(ステップSP1)、入力された投与量及びピストン11のボリュームストロークに基づいてピストン11の往復回数Nを算出する(ステップSP2)。
【0085】
CPU41は、往復時間T1及び押込上限時間T2、引戻上限時間T3を算出し(ステップSP3)、動作確認時間T4を算出する(ステップSP4)。そしてCPU41は、駆動部12を介してピストン11の押込み動作を開始させ(ステップSP5)、押込み動作開始から動作確認時間T4経過後(ステップSP6)、支持体31と移動体35が接触しているか否かを検出する(ステップSP7)。
【0086】
CPU41は、支持体31と移動体35が接触していることを検出した場合(ステップSP7でYES)、駆動部12の動作を停止させると共に、閉塞している旨を通知し(ステップSP8)、処理を終了する。一方CPU41は、支持体31と移動体35が接触していないことを検出した場合(ステップSP7でNO)、押込み動作開始から押込上限時間T2経過までに支持体31と移動体35が接触したか否かを検出する(ステップSP9及び10)。
【0087】
CPU41は、押込み動作開始から押込上限時間T2までに支持体31と移動体35が接触したことを検出できなかった場合(ステップSP9でYES)、駆動部12の動作を停止させると共に、閉塞している旨を通知し(ステップSP8)、処理を終了する。一方CPU41は、支持体31と移動体35が接触したことを検出できた場合(ステップSP10でYES)、駆動部12を介してピストン11の引戻し動作を開始させ(ステップSP11)、引戻し動作開始から動作確認時間T4経過後(ステップSP12)、支持体31と移動体35が接触しているか否かを検出する(ステップSP13)。
【0088】
CPU41は、支持体31と移動体35が接触していることを検出した場合(ステップSP13でYES)、駆動部12の動作を停止させると共に閉塞している旨を通知し(ステップSP14)、処理を終了する。一方CPU41は、支持体31と移動体35が接触していないことを検出した場合(ステップSP14でNO)、引戻し動作開始から引戻上限時間T3経過までに支持体31と移動体35が接触したか否かを検出する(ステップSP15及び16)。
【0089】
CPU41は、支持体31と移動体35が接触したことを検出できなかった場合(ステップSP15でYES)、駆動部12の動作を停止させると共に、閉塞している旨を通知し(ステップS14)、処理を終了する。一方CPU41は、支持体31と移動体35が接触したことを検出できた場合(ステップSP16でYES)、ピストン11を往復回数Nだけ往復移動させたか判断する(ステップSP17)。
【0090】
CPU41は、ピストン11を往復回数Nだけ往復移動させていない場合、押込み開始から往復時間T1を経過するまで待機し(ステップSP18及び19)、押込み開始から往復時間T1を経過したらステップSP5に戻る。一方CPU41は、ピストン11を往復回数Nだけ往復移動させた場合、処理を終了する。
【0091】
〈2.第2の実施の形態〉
〔2−1.薬剤投与装置の構成〕
第2の実施の形態における薬液投与装置100は、第1の実施の形態における薬液投与装置1の駆動部12の代わりに駆動部112が設けられ、それ以外の部分は薬液投与装置1と同一である。
【0092】
駆動部112は、図4との対応部分に同一符号を付した図10に示すように、第1の実施の形態における駆動部12の支持体31の代わりに支持体131が設けられ、それ以外の部分は駆動部12と同一である。
【0093】
支持体131は、導電性の材質でなる移動制限部131A及び131Bが絶縁性の部材でなる支持体本体部131Cに接続される。
【0094】
移動制限部131A及び131Bは、対向する面同士が所定間隔(ピストン11のストローク及び突出部35Bの幅を合わせた距離)離れるようにして移動体35の方向に設けられ、それぞれが電気的に基板部8と接続される。
【0095】
基板部8では移動体35と移動制限部131A及び131Bがそれぞれ接触した際に電気が流れる回路が形成される。
【0096】
そしてCPU41は、移動制限部131A又は131Bのどちらかに電気が流れることを検出することにより、突出部35Bが移動制限部31A又は31Bのどちらに接触しているのか判断することができる。
【0097】
従ってCPU41は、移動体35が移動制限部131A又は131Bのどちらに接触したかを検出することにより、ピストン11が最引戻位置又は最押込位置のどちらに位置しているか判断することができる。
【0098】
〔2−2.閉塞検出処理〕
CPU41は、ROM42に格納された閉塞検出アルゴリズムが搭載された送液プログラムをRAM43に展開し、処理を実行する。CPU41は、処理を実行する際、図7に示したように、設定部51、駆動制御部52、閉塞検出部54及び報知制御部55として機能する。
【0099】
薬液投与装置1では、注入部6を介して外部から薬液貯蔵部7に薬液が充填された後、貼付部4が使用者の皮膚に貼り付けられると共に穿刺部5が使用者の皮膚に穿刺され、インターフェース部45を介して投与量及び投与速度が入力される。
【0100】
設定部51は、入力された投与量及びピストン11のボリュームストロークに基づいてピストン11の往復回数Nを算出する。また設定部51は、入力された投与速度及びピストン11のボリュームストロークに基づいてピストン11の往復時間T1及び押込上限時間T2、引戻上限時間T3を算出する。
【0101】
しかしながら、上述した第1の実施の形態とは異なり、突出部35Bが移動制限部131A又は131Bのどちらに接触しているのか判断することができるため、設定部51が動作確認時間T4を算出することはない。
【0102】
駆動制御部52は、設定部51により算出された往復回数N及び往復時間T1でピストン11を移動させるよう駆動部12を制御し、駆動部12を介してピストン11の押込み動作を開始させる。なお、押込み動作開始の際、ピストン11は最引戻位置にあり、支持体制限部131Bと突出部35Bとが接触している場合について説明するが、ピストン11は最引戻位置にない場合には駆動制御部52の制御に基づいてピストン11を最引戻位置まで移動させてから押込み動作を開始させるようにしてもよい。
【0103】
閉塞検出部54は、押込み動作開始から押込上限時間T2経過までに支持体131Aと移動体35が接触したかを検出する。
【0104】
閉塞検出部54は、支持体131Aと移動体35が接触したことを検出できずに押込み開始から押込上限時間T2が経過した場合、穿刺部5や流路部13が閉塞していると判断し、駆動制御部52が駆動部12の動作を停止させ、また報知制御部55が穿刺部5や流路部13が閉塞している旨を報知部46を介して使用者に通知する。
【0105】
一方、閉塞検出部54は、押込み開始から押込上限時間T2までに支持体131Aと移動体35が接触したことを検出できた場合、ピストン11が最押込位置に移動していると判断する。この場合、駆動制御部52は、駆動部12を介してピストン11の引戻し動作を開始させる。
【0106】
閉塞検出部54は、引戻し動作開始から引戻上限時間T3までに支持体131Bと移動体35が接触したかを検出する。閉塞検出部54は、引戻し動作開始から引戻上限時間T3までに支持体131Bと移動体35が接触したことを検出できなかった場合、ピストン11が移動していないと判断する。このとき駆動制御部52は駆動部12の動作を停止させ、報知制御部55は穿刺部5や流路部13が閉塞している旨を報知部46を介して使用者に通知する。
【0107】
駆動制御部52、閉塞検出部54及び報知制御部55は、ピストン11を往復回数Nだけ往復移動させる間、上述した処理を繰り返し行う。駆動制御部52は、正常にピストン11を往復回数Nだけ往復移動させると駆動部12を停止させ処理を終了する。
【0108】
〔2−3.閉塞検出処理手順〕
【0109】
次に、上述した閉塞検出処理の手順について図11に示すルーチンRT2のフローチャートを用いて説明する。CPU41は、インターフェース部45を介して投与量及び投与速度が入力されると(ステップSP21)、入力された投与量及びピストン11のボリュームストロークに基づいてピストン11の往復回数Nを算出する(ステップSP22)。
【0110】
CPU41は、往復時間T1及び押込上限時間T2、引戻上限時間T3を算出し(ステップSP23)、駆動部12を介してピストン11の押込み動作を開始させる(ステップSP24)。
【0111】
CPU41は、押込み動作開始から押込上限時間T2経過までに移動制限部131Aと移動体35が接触したか否かを検出し(ステップSP25及び26)、移動制限部131Aと移動体35が接触したことを検出できなかった場合(ステップSP25でYES)、駆動部12の動作を停止させると共に閉塞している旨を通知し(ステップSP27)、処理を終了する。
【0112】
一方CPU41は、支持体131Aと移動体35が接触したことを検出できた場合(ステップSP26でYES)、駆動部12を介してピストン11の引戻し動作を開始させる(ステップSP28)。
【0113】
CPU41は、引戻し動作開始から引戻上限時間T3経過までに移動制限部131Bと移動体35が接触したか否かを検出し(ステップSP29及び30)、移動制限部131Bと移動体35が接触したことを検出できなかった場合(ステップSP29でYES)、駆動部12の動作を停止させると共に、閉塞している旨を通知し(ステップSP31)、処理を終了する。
【0114】
一方CPU41は、支持体31と移動体35が接触したことを検出できた場合(ステップSP30でYES)、ピストン11を往復回数Nだけ往復移動させたか判断する(ステップSP32)。
【0115】
CPU41は、ピストン11を往復回数Nだけ往復移動させていない場合、押込み開始から往復時間T1を経過するまで待機し(ステップSP33及び34)、押込み開始から往復時間T1を経過したらステップSP24に戻る。一方CPU41は、ピストン11を往復回数Nだけ往復移動させた場合、処理を終了する。
【0116】
〈3.動作及び効果〉
以上の構成において、薬液投与装置1及び100は、薬液(薬液)が貯蔵される薬液貯蔵部から使用者の体内へ該薬液を送出するための流路部13と一端が接続されたシリンダ14の他端側でピストン11が摺動することにより該薬液を使用者の体内に送出する。
【0117】
この薬液投与装置1及び100では、ピストン11が往復時間T1に基づいて設定される押込上限時間T2以内に最引戻位置から最押込位置まで移動することができないことを検出することにより、穿刺部5又は流路部13の閉塞を検出する。
【0118】
これにより薬液投与装置1及び100は、ピストンを駆動する駆動部に印可される電流から検出される外筒内の圧力に基づいて閉塞を検出する場合の様にピストンとシリンダの摩擦力の増加等による電力増加による検出誤差が発生しないので、より正確に閉塞を検出することができる。
【0119】
また薬液投与装置1及び100は、支持体31、131及び移動体35が導電性の材質でなり、ピストン11を保持して共に移動する移動体35の突出部35Bが移動制限部31A及び131A、31B及び131Bに接触した際に流れる電流を検出することにより、移動体35が支持体31、131に接触しているか否かを検出する。
【0120】
そして薬液投与装置1及び100は、移動体35が支持体31、131に接触していると検出した場合、ピストン11が最引戻位置又は最押込位置に移動されたことを検出することができる。
【0121】
これにより薬液投与装置1及び100は、流路部の圧力を圧力センサを用いなくてもピストン11の位置を検出することが出来るので、圧力センサを用いない分、小型化することができる。
【0122】
さらに薬液投与装置1は、移動制限部31A及び31Bが支持体31と共に導電性部材で一体形成されており、突出部35Bが移動制限部31A又は31Bのどちらに接触しているのか判断できない場合であっても、突出部35Bが移動制限部31A又は31Bに接触している状態から動作確認時間T4経過後に離れていることを検出する。
【0123】
これにより薬液投与装置1は、一方の移動制限部31A又は31Bに突出部35Bが接触している状態から、ピストン11が全く移動していなくても移動体35が移動して他方の移動制限部31A又は31Bに突出部35Bが接触したと誤検出してしまうことを防止することができる。
【0124】
以上の構成によれば薬液投与装置1では、ピストン11の位置を検出するために圧力センサを用いないでよい分、装置全体を小型化することができる。
【0125】
〈4.他の実施の形態〉
なお上述した実施の形態においては、ピストン11の直径を0.8mm、シリンダ14の内径を0.81mmとし、ピストン11とシリンダ14との隙間を5μmとした場合について説明した。本発明はこれに限らず、シリンダ14の内径は3mmまでとし、ピストン11とシリンダ14との隙間を2〜20μmとするようにしてもよい。
【0126】
また上述した実施の形態においては、ピストン11を往復移動させるものとして駆動部12及び112を適用するようにした場合についてのべたが、ピストン11を往復移動させるものであれば、例えば、ギアが回転軸に取り付けられたDCモータを回転させ、該ギアを介して送りねじによりピストン11を往復移動させるようにしてもよい。
【0127】
また上述した実施の形態においては、制限部15が吸込側蓋部21、送出側蓋部22、吸込側押付部23及び送出側押付部24により構成され、吸込側押付部23及び送出側押付部24を介して吸込側蓋部21及び送出側蓋部22を吸込管13A及び送出管13Bの他端に押し付けて流路部13の流路を薬液貯蔵部7から使用者の体内へ薬液が流れるよう制限するようにした場合について述べた。本発明はこれに限らず、制限部15の代わりに自動弁又は一方向弁を設け、流路部13の流路を薬液貯蔵部7から使用者の体内へ薬液が流れるよう制限するようにしてもよい。
【0128】
また上述した実施の形態においては、穿刺部5と流路部13が別々に構成されている場合について述べたが、薬液貯蔵部7から外部まで薬液が流れる流路を流路部として一体形成するようにしてもよい。
【0129】
また上述した実施の形態においては、引戻し動作時にもピストン11の移動に基づいて閉塞を検出するようにした場合(ステップSP12〜15、SP29〜SP31)について述べたが、本発明はこれに限らず、引戻し動作時には閉塞を検出しないようにしてもよい。但し、往復時間T1内にピストン11の往復が完了しなければならないので、その所定時間内にピストン11が引き戻らない場合には報知するようにする。
【産業上の利用可能性】
【0130】
本発明は、例えば医療分野に適用することができる。
【符号の説明】
【0131】
1……薬液投与装置、2……下筐体部、3……上筐体部、4……貼付部、5……穿刺部、6……注入部、7……薬液貯蔵部、8……基板部、9……送出部、11……ピストン、12……駆動部、13……流路部、14……シリンダ、15……制限部、31……支持体、32……軸支持体、33……軸体、34……振動体、35……移動体、41……CPU、42……ROM、43……RAM、44……電源部、45……インターフェース部、46……報知部、47……バス。
【技術分野】
【0001】
本発明は、薬液投与装置及び閉塞検出方法に関し、例えば薬液を体内に投与する場合に適用して好適なものである。
【背景技術】
【0002】
従来、薬液(インスリン)を投与する装置として、使用者の皮膚に付着させて用いられる携帯型の装置であって、薬液容器である外筒内に充填された薬液をシール部材(ピストン)を介して押し出すことにより体内に投与する、所謂シリンジポンプ型の装置が提案されている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特表2010−501283号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、上述したような薬液を投与する装置では、外筒内に充填された薬液が変性したり、使用者の体内に挿入されたカニューレが変形したりする等して薬液が流れる流路が閉塞し、薬液が使用者に正常に投与できなくなる可能性がある。
【0005】
流路が閉塞したことを使用者に通知するため、外筒内に充填された薬液を押し出すピストンを動作させるモーターの電流を所定間隔ごとに検出するようになされた装置がある。
【0006】
このような装置では、電流が所定の閾値以上であった場合には外筒内の圧力が一定値以上になった、すなわち薬液が正常に送出できていないとして作動を中止して使用者に通知するようになされた装置が提案されている。
【0007】
このような装置ではピストンを動作させるモーターの電流に基づいて外筒内の圧力を検出しているため、外筒及びピストンの摩擦力が増加することでモーターの負荷が増加し、電流が増加した場合には外筒内の圧力を正確に検出できなくなる。
【0008】
これに対して、薬液が流れる流路の圧力を正確に検出するために、該流路に圧力センサを用いることも考えられる。しかしながら、使用者に長時間に保持させる装置ではより小型化することが求められるため、圧力センサを設けることが小型化することの弊害となる。
【0009】
本発明は以上の点を考慮してなされたもので、小型化し得る薬液投与装置及び閉塞検出方法を提案しようとするものである。
【課題を解決するための手段】
【0010】
かかる課題を解決するため本発明は、使用者の体内に薬液を投与するための薬液投与装置であって、該薬液を貯蔵する薬液貯蔵部と、薬液貯蔵部から使用者の生体内へ薬液を送液する流路を形成する流路部と、流路部の途中に設けられたシリンダ部と、シリンダ部内を摺動するピストンと、ピストンをシリンダ部内で摺動させる駆動部と、ピストンを制御する駆動制御部と、を有し、流路部は、薬液貯蔵部とシリンダ 部とを接続する流入路と、シリンダ部と使用者の生体へと接続される流出路とから成り、流路部は、薬液貯蔵部からシリンダ部へと薬液が流れるように流入路上に設けられた該薬液の流れる方向を制御する第1制御部と、シリンダ部から外部使用者の生体内へ薬液が流れるように、流出路上に設けられた該薬液の流れる方向を制限する第2の制限部とを有し、駆動制御部は、ピストンが所定時間にシリンダ部内を最も引戻された位置から最も押込まれた位置への移動を検知するピストン検知部を備え、検知部がピストンの所定時間内の移動を移動できなかった場合、流路部が閉塞していることを検出する閉塞検出部とを有している。
【0011】
また本発明は、使用者の体内に薬液を投与する薬液投与装置における閉塞検出方法であって、薬液を貯蔵する薬液貯蔵部から使用者の体内へ送液する流路を形成する流路部に一端が接続されるシリンダ部の内部を摺動するピストンがあり、ピストンがシリンダ内の最も引戻された位置から最も押込まれた位置へ移動する際に薬液を流路部を介して使用者の体内に送液するようピストンを駆動する駆動部を介して、所定時間でピストンが最も引戻された位置から最も押込まれた位置へ移動するよう駆動部を制御する駆動制御ステップと、所定時間に基づいて設定される時間でピストンが最も引戻された位置から最も押込まれた位置へ移動できなかった場合、流路部が閉塞していることを検出する閉塞検出ステップとを有する。
【0012】
これにより、ピストンが最も引戻された位置から最も押込まれた位置に設定される時間で移動できなかったことにより閉塞を検出することができるので、簡易な構成で閉塞を正確に検出できる。
【発明の効果】
【0013】
本発明によれば、ピストンが最も引戻された位置から最も押込まれた位置に設定される時間で移動できなかったことにより閉塞を検出することができるので、簡易な構成で閉塞を正確に検出でき、かくして装置全体を小型化することができる。
【図面の簡単な説明】
【0014】
【図1】薬液投与装置の構成を示す略線図である。
【図2】薬液投与装置の分解斜視図である。
【図3】送出部による薬液の送出の様子を示す略線図である。
【図4】第1の実施の形態における駆動部の構成を示す略線図である。
【図5】第1の実施の形態における駆動部の断面図である。
【図6】振動体の変形の様子を示す略線図である。
【図7】薬液投与装置の電気的構成を示す略線図である。
【図8】CPUの機能的構成の構成を示す略線図である。
【図9】第1の実施の形態における閉塞検出処理手順を示すフローチャートである。
【図10】第2の実施の形態における駆動部の構成を示す略線図である。
【図11】第2の実施の形態における閉塞検出処理手順を示すフローチャートである。
【発明を実施するための形態】
【0015】
以下に、図面について、本発明の一実施の形態を詳述する。
【0016】
〈1.第1の実施の形態〉
〔1−1.薬剤投与装置の構成〕
図1に示すように、薬液投与装置1は、使用者の皮膚に貼り付けることにより保持されて使用される携帯型の装置であり、上側が開口し内部に空間が設けられた下筐体部2と該下筐体部2の開口に嵌合する上筐体部3により扁平な略直方体形状に形成される。
【0017】
薬液投与装置1の大きさは、使用者の皮膚にはりつけることができる程度にまで小型化されていればよいが、例えば横32mm、縦44mm、高さ11mm略直方体形状が挙げられる。
【0018】
下筐体部2には、両面テープ等でなる貼付部4が底面2Aに設けられる。薬液投与装置1は、接着部4が使用者の皮膚に貼り付けられることにより該使用者に保持される。
【0019】
薬液投与装置1は、下筐体部2の底面2Aに、内部に充填された薬液を使用者の体内へ投与するために該使用者の皮膚を穿刺するための針やカニューレ等でなる穿刺部5と、内部に設けられた薬液貯蔵部(図2)に薬液を注入するための注入路である注入部6とが設けられる。
【0020】
薬液投与装置1は、図2に示すように、下筐体部2と上筐体部3とで形成される空間に注入部6、薬液貯蔵部7、基板部8及び送出部9が配される。
【0021】
薬液貯蔵部7は、柔軟性を有する材料より形成された容器である。薬液貯蔵部7を構成する材質としては、例えば、ポリオレフィンを含むものであるのが好ましい。軟質バッグ2の形成材料として、特に好ましいものとして、ポリエチレンまたはポリプロピレンに、スチレン−ブタジエン共重合体やスチレン−エチレン−ブチレン−スチレンブロック共重合体等のスチレン系熱可塑性エラストマーあるいはエチレン−プロピレン共重合体やエチレン−ブテン共重合体,プロピレン−αオレフィン共重合体等のオレフィン系熱可塑性エラストマーをブレンドし柔軟化した軟質樹脂を挙げることができる。薬液貯蔵部7の容器の容量は、特に限定されるものではないが、小型化などを考慮するとたとえば2mLの容積のものが挙げられる。そして、薬液が注入部6を介して外部から充填される。薬剤貯蔵部7に貯蔵される薬液としては、例えばインスリンや各種ホルモン、モルヒネなどの鎮痛薬、あるいは抗炎症薬剤などが挙げられる。基板部8は、電源電力を供給する電源部44(図7)や送出部9を制御する回路などが配される。
【0022】
送出部9は、図2及び図3に示すように、ピストン11、CPU41(図7)の制御に応じて該ピストン11を往復駆動させる駆動部12、及び薬液貯蔵部7から穿刺部5まで薬液が流れる流路を形成する流路部13、一端が流路部13に接続され他端から挿入されるピストン11が内部で摺動されるシリンダ14、流路部13の流路の開閉を行い薬液の流れを制限する制限部15を含む構成とされる。
【0023】
ピストン11は、駆動部12により駆動されてシリンダ14内で所定のストロークで摺動する。ピストン11の材質としては、例えば、ステンレス鋼、銅合金、アルミ合金、チタン材、ポリプロピレンやポリカーカーボネートなどの熱可塑性エラストマー等が挙げられ、その直径は例えば、0.8mm程度である。また、ピストン11はシリンダ14内を摺動することにより一定量の薬液を送液するが、そのストロークは例えば2mm程度である。
【0024】
流路部13は、流入路を形成する吸込管13A、流出路を形成する送出管13B及びシリンダ部へと接続するための接続管13Cにより構成される。吸込管13Aは、一端が薬剤貯蔵部7に接続され、他端が接続管13Cと接続される。送出管13Bは、一端が穿刺部5と接続され、他端が接続管13Cと接続される。接続管13Cは、端部がそれぞれ吸込管13A及び送出管13Bと接続され、中央部分にシリンダ14が接続される。
【0025】
制限部15は、第1の制限部を構成する吸込側蓋部21及び吸込側押付部23、第2の制限部を構成する送出側蓋部22及び送出側押付部24により構成される。
【0026】
吸込側蓋部21及び送出側蓋部22は、弾性変形可能な部材でなり、吸込管13A及び送出管13Bのそれぞれ他端に対して所定の間隔だけ離間して配される。吸込側押付部23及び送出側押付部24は、CPU41(図7)の制御に応じて動作するアクチュエータであり、吸込側蓋部21及び送出側蓋部22を吸込管13A及び送出管13Bの他端に押し当てることにより吸込管13A及び送出管13Bの他端をそれぞれ塞ぐ。
【0027】
シリンダ14は、ピストン11の直径より大きな内径で、一端が接続管13Cと接続され、他端側からピストン11が挿入され内部で摺動する。シリンダ14とピストン11との直径の差は、例えば0.01mm程度である。
【0028】
送出部9は、薬液貯蔵部7から外部に薬液を送出する際、図3に示すように、ピストン11が最も押込まれる位置(以下、最押込位置とも呼ぶ)にきた時、吸込側押付部23を吸込側蓋部21から離して吸込管13A及び接続管13Cの間の流路を開放すると共に、送出側押付部24により送出側蓋部22を送出管13Bの他端に押し付けて送出管13B及び接続管13Cの間の流路を塞ぐ(図3(A))。
【0029】
そして送出部9は、ピストン11を最押込位置から最も引き戻される位置(以下、これを最引戻位置とも呼ぶ)までシリンダ14内で摺動させ(以下、この摺動方向を引戻方向とも呼ぶ)、薬液貯蔵部7に貯蔵された薬液を吸込管13A及び接続管13Cを介してシリンダ14内に吸い出す(図3(B))。
【0030】
送出部9は、ピストン11が最引戻位置に移動されると、吸込側押付部23により吸込側蓋部21を吸込管13Aの他端に押し付けて吸込管13A及び接続管13Cの間の流路を塞ぎ(図3(C))、送出側押付部24を送出側蓋部22から離して送出管13B及び接続管13Cの間の流路を開放する(図3(D))。
【0031】
送出部9は、ピストン11を最引戻位置から最押込位置までシリンダ14内を摺動させ(以下、この摺動方向を押込方向とも呼ぶ)、シリンダ14の内部に吸い出された薬液を接続管13C、送出管13B及び穿刺部5を介して使用者の体内に送出する(図3(E)及び(F))。
【0032】
送出部9は、ピストン11を一往復させる動作(図3(A)〜(F))で約1μLの薬液を使用者の体内に投与でき、この動作を設定された周期及び間隔で繰り返し行うことにより、所望の投与速度及び投与量で薬液を使用者に投与できる。
【0033】
駆動部12は、図4及びその断面図である図5に示すように、支持体31、軸支持体32、軸体33、振動体34、移動体35、軸当接体36及び締付体37を含む構成とされる。
【0034】
支持体31は、導電性の部材でなり、その一端側に設けられた軸支持体32を介して駆動部12の各部を支持する。また支持体31は、対向する面同士が所定間隔(ピストン11のストローク及び突出部35Bの幅を合わせた距離)離れるようにして移動体35の方向に移動制限部31A及び31Bが突設されており、該移動制限部31A及び31Bによりピストン11の移動を制限する。また支持体31は、電気的に基板部8と接続される。
【0035】
軸支持体32は、絶縁性の部材でなり、軸体33が挿通される孔が設けられる。軸体33は、略円柱形状でなり、軸支持体32の孔に挿通されて軸方向に移動可能に支持される。軸体33の一端には、例えば電圧素子でなる振動体34が当接される。
【0036】
振動体34は、CPU41(図7)の制御に基づいて電圧が印加されることにより、中央部分が周辺部分に対して押し出されるように湾曲する。このとき湾曲する方向は印加される電圧の方向によって異なる。具体的には、例えば電圧を印加していないときは平面状になっており、(図6(A))、図6(B)の方向(この方向を仮に正方向とする)に電圧を印加することで軸体33を押し出すように変形し、図6(B)とは反対方向(この方向を仮に負方向とする)に電圧を印加することで軸体33を引き戻すように変形する(図6(C))。
【0037】
軸体33は、軸支持体32を挟んで振動体34とは反対側で移動体35及び軸当接体36に締付体37を介して囲まれるようにして所定の摩擦力で挟持される。
【0038】
移動体35は、導電性の部材でなり、軸当接体36と対向する軸対向部35Aとは反対側にピストン11が接続される。
【0039】
また移動体35は、支持体31の移動制限部31A及び31Bの間で、移動体35が移動した際に移動制限部31A及び31Bの対向するそれぞれの面に当接するように所定幅の突出部35Bが設けられる。また移動体35は、電気的に基板部8と接続される。
【0040】
駆動部12は、振動体34への印加電圧が緩やかに正方向に変化すると該振動体34が伸びて軸体33を押込方向に移動させる。このとき移動体35、軸当接体36、締付体37及びピストン11は、軸体33と移動体35及び軸当接体36との摩擦力により軸体33と共に押込方向に移動する。
【0041】
その後、駆動部12は、振動体34への印加電圧が急激に負方向に変化すると該振動体34が縮んで軸体33を引戻方向に移動させる。このとき移動体35、軸当接体36、締付体37及びピストン11は、慣性力が軸体33と移動体35及び軸当接体36との摩擦力に打ち勝つことにより軸体33が滑り、その位置に留まる。
【0042】
このようにして駆動部12は、この1回の動作でピストン11を押込方向に微小量移動させる。微小量としては、例えば約0.2μm程度である。駆動部12は、これを所定回数繰り返し行うことによりピストン11を最引戻位置から最押込位置まで移動させる。例えば、駆動部12を10000回移動させることにより、2mm移動させることができる。このとき駆動部12は、移動制限部31Aに突出部35Bが当接することにより最押込位置より押込方向にピストン11が移動することを防止できる。
【0043】
一方、駆動部12は、振動体34への印加電圧が急激に正方向に変化すると該振動体34が伸びて軸体33を押込方向に移動させる。このとき移動体35、軸当接体36、締付体37及びピストン11は、慣性力が軸体33と移動体35及び軸当接体36との摩擦力に打ち勝つことにより軸体33が滑り、その位置に留まる。
【0044】
駆動部12は、振動体34への印加電圧が緩やかに負方向に変化すると該振動体34が縮んで軸体33を引戻方向に移動させる。このとき移動体35、軸当接体36、締付体37及びピストン11は、軸体33と移動体35及び軸当接体36との摩擦力により軸体33と共に引戻方向に移動する。
【0045】
このようにして駆動部12は、この1回の動作でピストン11を引戻方向に微小量移動させる。微小量としては、たとえば約0.2μmである。駆動部12は、これを所定回数繰り返し行うことによりピストン11を最押込位置から最引戻位置まで移動させる。所定回数としては、たとえば10000回であり、これにより2mmピストン11を移動させることができる。このとき駆動部12は、移動制限部31Bに突出部35Bが当接することにより最引戻位置より引戻方向にピストン11が移動することを防止できる。
【0046】
〔1−2.薬液投与装置の電気的構成〕
薬液投与装置1は、図7に示すように、CPU(Central Processing Unit)41、ROM(Read Only Memory)42、RAM(Random Access Memory)43、電源部44、インターフェース部(I/F部)45、報知部46、駆動部12及び制限部15がバス47を介して接続される。
【0047】
CPU41、ROM42、RAM43、電源部44及び報知部46は、基板部8上(図示せず)に配される。電源部44は電池が適応される。報知部46は、音声で報知するためのスピーカや、光で報知するためのLEDなどが適応される。
【0048】
インターフェース部45は、上筐体部3又は下筐体部2に配され使用者の入力命令を受け付けるボタン(図示せず)等が適応される。またインターフェース部45の代わりに無線による通信を行うためのアンテナ及び通信回路からなる通信部を搭載し、本ポンプとは別体となる操作部(図示せず)から無線通信による入力命令を受け付ける方式でもよい。
【0049】
CPU41は、ROM42に格納された基本プログラムをRAM43に読み出して実行することより全体を統括制御すると共に、ROM42に記憶された各種アプリケーションプログラムをRAM43に読み出して実行することにより各種処理を実行する。使用者は薬液投与装置1を操作し、制御部であるCPU61に指令を出すことで、CPU61は基本プログラムを読みだし、駆動部12及び制限部15を制御することで使用者へ薬剤が投与される。
【0050】
ところで上述したように、支持体31と移動体35は、絶縁体である軸支持体32を介して接続されているので、軸支持部32を介して電気的に接続されることはない。
【0051】
一方、支持体31及び移動体35はそれぞれ基板部8と電気的に接続されており、基板部8では支持体31及び移動体35が接触した際に電気が流れる回路が形成される。
【0052】
すなわち支持体31と移動体35は、移動体35の突起部35Aが支持体31の移動制限部31A又は31Bとに接触した場合に電気的に接続される。
【0053】
CPU41は、支持体31及び移動体35に電気が流れることを検出することにより、接触移動体35の突起部35Aが支持体31の移動制限部31A又は31Bに接触したことを検出することができる。
【0054】
〔1−3.閉塞検出処理〕
薬液投与装置1では、穿刺部5が使用者の体動などで変形したり、薬液などの薬液が変性するなどして穿刺部5や流路部13が閉塞し、薬液が使用者に正確に投与できなくなる可能性がある。
【0055】
そこでCPU41は、穿刺部5や流路部13が閉塞しているか否かを検出する閉塞検出処理を実行し、穿刺部5や流路部13の閉塞を検出する。
【0056】
CPU41は、ROM42に格納された閉塞検出アルゴリズムが搭載された送液プログラムをRAM43に展開し、処理を実行する。CPU41は、処理を実行する際、図8に示すように、設定部51、駆動制御部52、ピストン検知部53、閉塞検出部54及び報知制御部55として機能する。
【0057】
薬液投与装置1では、注入部6を介して外部から薬液貯蔵部7に薬液が充填された後、貼付部4が使用者の皮膚に貼り付けられると共に穿刺部3が使用者の皮膚に穿刺され、インターフェース部45を介して投与量及び投与速度が入力される。
【0058】
設定部51は、入力された投与量及びピストン11のボリュームストロークに基づいてピストン11の往復回数Nを算出する。例えば、投与量が2mLで、ピストン11のボリュームストロークが0.5μLの場合、設定部51はピストン11の往復回数Nを4000回と算出する。
【0059】
また、設定部51は、入力された投与速度及びピストン11のボリュームストロークに基づいてピストン11の往復時間T1を算出する。例えば、投与速度が1μL/sで、ピストン11のボリュームストロークが0.5μLの場合、設定部51はピストン11の往復時間T1を0.5sと算出する。
【0060】
従って薬液投与装置1では、穿刺部5や流路部13が閉塞していない場合、ピストン11を往復時間T1である0.5sで往復移動させることができる。
【0061】
しかしながら穿刺部5や流路部13が閉塞した場合、ピストン11を押込方向に移動させようとすると、シリンダ14内に引き出された薬液を押し出すことができず、シリンダ14内の内部圧力の上昇により引戻方向の力がピストン11に加わる。
【0062】
このため、駆動部12が振動体34に印可電圧が緩やかに増加させて軸体33と共に移動体35及び軸当接体36の摩擦力で押込方向にピストン11を移動させようとするが、該摩擦力よりもピストン11に加わる力が大きくなり、ピストン11の移動量が減少するか全く移動しなくなる。
【0063】
従って駆動部12は、穿刺部5や流路部13が閉塞していない場合はピストン11を往復時間T1の間に往復させるために充分間に合う時間(例えばT1の半分の時間)、で最引戻位置から最押込位置まで移動させることができるのに対して、穿刺部5や流路部13が閉塞した場合には往復時間T1内でのピストン11の往復に間に合うために必要な時間内に最引戻位置から最押込位置まで移動させることができなくなる。
【0064】
そこで設定部51は、ピストン11が最引戻位置から最押込位置まで移動するのにかかる時間に対して穿刺部5や流路部13が閉塞していると判断されるための上限の時間(以下、これを押込上限時間とも呼ぶ)T2を算出する。この押込上限時間T2は、例えば往復時間T1の半分の時間以上で往復時間T1未満(往復時間T1の0.5〜0.7倍程度)に設定される。上限時間T2を往復時間T1未満にすることで往復時間T1以内に閉塞状態を検出することができる。
【0065】
さらにピストンが最押込位置から最引戻位置まで移動するのにかかる時間に対して穿刺部5や流路部13が閉塞していると判断されるための上限の時間(以下、これを引戻上限時間とも呼ぶ)T3を算出する。引戻上限時間T3は往復時間T1から押込上限時間T2を減算した時間である。
【0066】
例えば、上限時間T2が往復時間T1の0.7倍に設定された場合、設定部51は押込上限時間T2を0.35s、引戻上限時間T3を0.15sと算出する。
【0067】
ところで、支持体31は導電性材料で一体形成されているので、支持体31と移動体35が電気的に接続されていることを検出するだけでは、突出部35Bが移動制限部31A又は31Bのどちらに接触しているのか判断することができない。
【0068】
そのため、突出部35Bが移動制限部31Bに接触している状態で駆動部12を駆動させると、ピストン11が全く移動していなくても支持体31と移動体35が接触しているので、移動体35が移動して突出部35Bが移動制限部31Aに接触したと誤検出してしまうことが考えられる。このとき、本来閉塞などによりピストンが全く動作していないのに対して、接触したと判断することで押込上限時間T2内にピストンが最押込位置に到達し、閉塞していないと判断ミスをしてしまうことになる。
【0069】
このような誤判断を防止するため、突出部35Bが移動制限部31A又は31Bに接触している状態から、押込上限時間T2未満でかつ引戻上限時間T3未満に、突出部35Bが移動制限部31A及び31Bから離れたことを確認することが必要となる。
【0070】
そこで設定部51は、突出部35Bが移動制限部31A又は31Bに接触している状態から離れたことを確認するための時間(以下、これを動作確認時間とも呼ぶ)T4を算出する。この動作確認時間T4は、押込上限時間T2未満でかつ引戻上限時間T3未満(例えば押込上限時間T2の0.2倍程度)に設定される。
【0071】
例えば、動作確認時間T4が押込上限時間T2の0.2倍に設定された場合、設定部51は動作確認時間T4を0.07sと算出する。
【0072】
駆動制御部52は、設定部51により算出された往復回数N及び往復時間T1でピストン11を移動させるよう駆動部12を制御し、駆動部12を介してピストン11の押込み動作を開始させる。なお、押込み動作開始の際、ピストン11は最引戻位置にあり、移動体制限部31Bと突出部35Bとが接触している場合について説明するが、ピストン11は最引戻位置にない場合には駆動制御部52の制御に基づいてピストン11を最引戻位置まで移動させてから押込み動作を開始させるようにしてもよい。
【0073】
ピストン検知部53は、駆動制御部52の制御に基づいて駆動部12がピストン11を最引戻位置から移動させ始めると、押込み動作開始から動作確認時間T4経過後に支持体31と移動体35が接触しているか否かを検出する。
【0074】
閉塞検出部54は、ピストン検知部53が押込み動作開始から動作確認時間T4経過後に支持体31と移動体35が接触していることを検出した場合、ピストン11が移動していないと判断する。このとき駆動制御部52は駆動部12の動作を停止させる。また報知制御部55は、報知部46を制御し、穿刺部5や流路部13が閉塞している旨を報知部46を介して使用者に通知する。
【0075】
一方、ピストン検知部53は、押込み動作開始から動作確認時間T4経過後に支持体31と移動体35が接触していないことを検出した場合、押込み動作開始から押込上限時間T2経過までに支持体31と移動体35が接触したかを検出する。
【0076】
閉塞検出部54は、支持体31と移動体35が接触したことを検出できずに押込み開始から押込上限時間T2が経過した場合、穿刺部5や流路部13が閉塞していると判断し、上述と同様に、駆動制御部52が駆動部12の動作を停止させ、また報知制御部55が穿刺部5や流路部13が閉塞している旨を報知部46を介して使用者に通知する。
【0077】
一方、閉塞検出部54は、押込み動作開始から押込上限時間T2までに支持体31と移動体35が接触したことを検出できた場合、ピストン11が最押込位置に移動していると判断する。
【0078】
そして駆動制御部52は、駆動部12を介してピストン11の引戻し動作を開始させる。
【0079】
ピストン検知部53は、ピストン11の押込み動作時と同様に引戻し動作開始から動作確認時間T4経過後に支持体31と移動体35が接触しているか否かを検出する。
【0080】
ピストン検知部53が引戻し開始から動作確認時間T4経過後に支持体31と移動体35が接触していることを検出した場合、駆動制御部52は駆動部12の動作を停止させ、報知制御部55は穿刺部5や流路部13が閉塞している旨を報知部46を介して使用者に通知する。
【0081】
一方、ピストン検知部53は、引戻し動作開始から動作確認時間T4経過後に支持体31と移動体35が接触していないことを検出した場合、引戻し開始から引戻上限時間T3までに支持体31と移動体35が接触したかを検出する。
【0082】
閉塞検出部54は、ピストン検知部53が引戻し動作開始から引戻上限時間T3までに支持体31と移動体35が接触したことを検出できなかった場合、ピストン11が移動していないと判断する。このとき駆動制御部52は駆動部12の動作を停止させ、報知制御部55は穿刺部5や流路部13が閉塞している旨を報知部46を介して使用者に通知する。
【0083】
駆動制御部52、ピストン検知部53、閉塞検出部54及び報知制御部55は、ピストン11を往復回数Nだけ往復移動させる間、上述した処理を繰り返し行う。駆動制御部52は、正常にピストン11を往復回数Nだけ往復移動させると駆動部12を停止させ処理を終了する。
【0084】
〔1−4.閉塞検出処理手順〕
次に、上述した閉塞検出処理の手順について図9に示すルーチンRT1のフローチャートを用いて説明する。CPU41は、インターフェース部45を介して投与量及び投与速度が入力されると(ステップSP1)、入力された投与量及びピストン11のボリュームストロークに基づいてピストン11の往復回数Nを算出する(ステップSP2)。
【0085】
CPU41は、往復時間T1及び押込上限時間T2、引戻上限時間T3を算出し(ステップSP3)、動作確認時間T4を算出する(ステップSP4)。そしてCPU41は、駆動部12を介してピストン11の押込み動作を開始させ(ステップSP5)、押込み動作開始から動作確認時間T4経過後(ステップSP6)、支持体31と移動体35が接触しているか否かを検出する(ステップSP7)。
【0086】
CPU41は、支持体31と移動体35が接触していることを検出した場合(ステップSP7でYES)、駆動部12の動作を停止させると共に、閉塞している旨を通知し(ステップSP8)、処理を終了する。一方CPU41は、支持体31と移動体35が接触していないことを検出した場合(ステップSP7でNO)、押込み動作開始から押込上限時間T2経過までに支持体31と移動体35が接触したか否かを検出する(ステップSP9及び10)。
【0087】
CPU41は、押込み動作開始から押込上限時間T2までに支持体31と移動体35が接触したことを検出できなかった場合(ステップSP9でYES)、駆動部12の動作を停止させると共に、閉塞している旨を通知し(ステップSP8)、処理を終了する。一方CPU41は、支持体31と移動体35が接触したことを検出できた場合(ステップSP10でYES)、駆動部12を介してピストン11の引戻し動作を開始させ(ステップSP11)、引戻し動作開始から動作確認時間T4経過後(ステップSP12)、支持体31と移動体35が接触しているか否かを検出する(ステップSP13)。
【0088】
CPU41は、支持体31と移動体35が接触していることを検出した場合(ステップSP13でYES)、駆動部12の動作を停止させると共に閉塞している旨を通知し(ステップSP14)、処理を終了する。一方CPU41は、支持体31と移動体35が接触していないことを検出した場合(ステップSP14でNO)、引戻し動作開始から引戻上限時間T3経過までに支持体31と移動体35が接触したか否かを検出する(ステップSP15及び16)。
【0089】
CPU41は、支持体31と移動体35が接触したことを検出できなかった場合(ステップSP15でYES)、駆動部12の動作を停止させると共に、閉塞している旨を通知し(ステップS14)、処理を終了する。一方CPU41は、支持体31と移動体35が接触したことを検出できた場合(ステップSP16でYES)、ピストン11を往復回数Nだけ往復移動させたか判断する(ステップSP17)。
【0090】
CPU41は、ピストン11を往復回数Nだけ往復移動させていない場合、押込み開始から往復時間T1を経過するまで待機し(ステップSP18及び19)、押込み開始から往復時間T1を経過したらステップSP5に戻る。一方CPU41は、ピストン11を往復回数Nだけ往復移動させた場合、処理を終了する。
【0091】
〈2.第2の実施の形態〉
〔2−1.薬剤投与装置の構成〕
第2の実施の形態における薬液投与装置100は、第1の実施の形態における薬液投与装置1の駆動部12の代わりに駆動部112が設けられ、それ以外の部分は薬液投与装置1と同一である。
【0092】
駆動部112は、図4との対応部分に同一符号を付した図10に示すように、第1の実施の形態における駆動部12の支持体31の代わりに支持体131が設けられ、それ以外の部分は駆動部12と同一である。
【0093】
支持体131は、導電性の材質でなる移動制限部131A及び131Bが絶縁性の部材でなる支持体本体部131Cに接続される。
【0094】
移動制限部131A及び131Bは、対向する面同士が所定間隔(ピストン11のストローク及び突出部35Bの幅を合わせた距離)離れるようにして移動体35の方向に設けられ、それぞれが電気的に基板部8と接続される。
【0095】
基板部8では移動体35と移動制限部131A及び131Bがそれぞれ接触した際に電気が流れる回路が形成される。
【0096】
そしてCPU41は、移動制限部131A又は131Bのどちらかに電気が流れることを検出することにより、突出部35Bが移動制限部31A又は31Bのどちらに接触しているのか判断することができる。
【0097】
従ってCPU41は、移動体35が移動制限部131A又は131Bのどちらに接触したかを検出することにより、ピストン11が最引戻位置又は最押込位置のどちらに位置しているか判断することができる。
【0098】
〔2−2.閉塞検出処理〕
CPU41は、ROM42に格納された閉塞検出アルゴリズムが搭載された送液プログラムをRAM43に展開し、処理を実行する。CPU41は、処理を実行する際、図7に示したように、設定部51、駆動制御部52、閉塞検出部54及び報知制御部55として機能する。
【0099】
薬液投与装置1では、注入部6を介して外部から薬液貯蔵部7に薬液が充填された後、貼付部4が使用者の皮膚に貼り付けられると共に穿刺部5が使用者の皮膚に穿刺され、インターフェース部45を介して投与量及び投与速度が入力される。
【0100】
設定部51は、入力された投与量及びピストン11のボリュームストロークに基づいてピストン11の往復回数Nを算出する。また設定部51は、入力された投与速度及びピストン11のボリュームストロークに基づいてピストン11の往復時間T1及び押込上限時間T2、引戻上限時間T3を算出する。
【0101】
しかしながら、上述した第1の実施の形態とは異なり、突出部35Bが移動制限部131A又は131Bのどちらに接触しているのか判断することができるため、設定部51が動作確認時間T4を算出することはない。
【0102】
駆動制御部52は、設定部51により算出された往復回数N及び往復時間T1でピストン11を移動させるよう駆動部12を制御し、駆動部12を介してピストン11の押込み動作を開始させる。なお、押込み動作開始の際、ピストン11は最引戻位置にあり、支持体制限部131Bと突出部35Bとが接触している場合について説明するが、ピストン11は最引戻位置にない場合には駆動制御部52の制御に基づいてピストン11を最引戻位置まで移動させてから押込み動作を開始させるようにしてもよい。
【0103】
閉塞検出部54は、押込み動作開始から押込上限時間T2経過までに支持体131Aと移動体35が接触したかを検出する。
【0104】
閉塞検出部54は、支持体131Aと移動体35が接触したことを検出できずに押込み開始から押込上限時間T2が経過した場合、穿刺部5や流路部13が閉塞していると判断し、駆動制御部52が駆動部12の動作を停止させ、また報知制御部55が穿刺部5や流路部13が閉塞している旨を報知部46を介して使用者に通知する。
【0105】
一方、閉塞検出部54は、押込み開始から押込上限時間T2までに支持体131Aと移動体35が接触したことを検出できた場合、ピストン11が最押込位置に移動していると判断する。この場合、駆動制御部52は、駆動部12を介してピストン11の引戻し動作を開始させる。
【0106】
閉塞検出部54は、引戻し動作開始から引戻上限時間T3までに支持体131Bと移動体35が接触したかを検出する。閉塞検出部54は、引戻し動作開始から引戻上限時間T3までに支持体131Bと移動体35が接触したことを検出できなかった場合、ピストン11が移動していないと判断する。このとき駆動制御部52は駆動部12の動作を停止させ、報知制御部55は穿刺部5や流路部13が閉塞している旨を報知部46を介して使用者に通知する。
【0107】
駆動制御部52、閉塞検出部54及び報知制御部55は、ピストン11を往復回数Nだけ往復移動させる間、上述した処理を繰り返し行う。駆動制御部52は、正常にピストン11を往復回数Nだけ往復移動させると駆動部12を停止させ処理を終了する。
【0108】
〔2−3.閉塞検出処理手順〕
【0109】
次に、上述した閉塞検出処理の手順について図11に示すルーチンRT2のフローチャートを用いて説明する。CPU41は、インターフェース部45を介して投与量及び投与速度が入力されると(ステップSP21)、入力された投与量及びピストン11のボリュームストロークに基づいてピストン11の往復回数Nを算出する(ステップSP22)。
【0110】
CPU41は、往復時間T1及び押込上限時間T2、引戻上限時間T3を算出し(ステップSP23)、駆動部12を介してピストン11の押込み動作を開始させる(ステップSP24)。
【0111】
CPU41は、押込み動作開始から押込上限時間T2経過までに移動制限部131Aと移動体35が接触したか否かを検出し(ステップSP25及び26)、移動制限部131Aと移動体35が接触したことを検出できなかった場合(ステップSP25でYES)、駆動部12の動作を停止させると共に閉塞している旨を通知し(ステップSP27)、処理を終了する。
【0112】
一方CPU41は、支持体131Aと移動体35が接触したことを検出できた場合(ステップSP26でYES)、駆動部12を介してピストン11の引戻し動作を開始させる(ステップSP28)。
【0113】
CPU41は、引戻し動作開始から引戻上限時間T3経過までに移動制限部131Bと移動体35が接触したか否かを検出し(ステップSP29及び30)、移動制限部131Bと移動体35が接触したことを検出できなかった場合(ステップSP29でYES)、駆動部12の動作を停止させると共に、閉塞している旨を通知し(ステップSP31)、処理を終了する。
【0114】
一方CPU41は、支持体31と移動体35が接触したことを検出できた場合(ステップSP30でYES)、ピストン11を往復回数Nだけ往復移動させたか判断する(ステップSP32)。
【0115】
CPU41は、ピストン11を往復回数Nだけ往復移動させていない場合、押込み開始から往復時間T1を経過するまで待機し(ステップSP33及び34)、押込み開始から往復時間T1を経過したらステップSP24に戻る。一方CPU41は、ピストン11を往復回数Nだけ往復移動させた場合、処理を終了する。
【0116】
〈3.動作及び効果〉
以上の構成において、薬液投与装置1及び100は、薬液(薬液)が貯蔵される薬液貯蔵部から使用者の体内へ該薬液を送出するための流路部13と一端が接続されたシリンダ14の他端側でピストン11が摺動することにより該薬液を使用者の体内に送出する。
【0117】
この薬液投与装置1及び100では、ピストン11が往復時間T1に基づいて設定される押込上限時間T2以内に最引戻位置から最押込位置まで移動することができないことを検出することにより、穿刺部5又は流路部13の閉塞を検出する。
【0118】
これにより薬液投与装置1及び100は、ピストンを駆動する駆動部に印可される電流から検出される外筒内の圧力に基づいて閉塞を検出する場合の様にピストンとシリンダの摩擦力の増加等による電力増加による検出誤差が発生しないので、より正確に閉塞を検出することができる。
【0119】
また薬液投与装置1及び100は、支持体31、131及び移動体35が導電性の材質でなり、ピストン11を保持して共に移動する移動体35の突出部35Bが移動制限部31A及び131A、31B及び131Bに接触した際に流れる電流を検出することにより、移動体35が支持体31、131に接触しているか否かを検出する。
【0120】
そして薬液投与装置1及び100は、移動体35が支持体31、131に接触していると検出した場合、ピストン11が最引戻位置又は最押込位置に移動されたことを検出することができる。
【0121】
これにより薬液投与装置1及び100は、流路部の圧力を圧力センサを用いなくてもピストン11の位置を検出することが出来るので、圧力センサを用いない分、小型化することができる。
【0122】
さらに薬液投与装置1は、移動制限部31A及び31Bが支持体31と共に導電性部材で一体形成されており、突出部35Bが移動制限部31A又は31Bのどちらに接触しているのか判断できない場合であっても、突出部35Bが移動制限部31A又は31Bに接触している状態から動作確認時間T4経過後に離れていることを検出する。
【0123】
これにより薬液投与装置1は、一方の移動制限部31A又は31Bに突出部35Bが接触している状態から、ピストン11が全く移動していなくても移動体35が移動して他方の移動制限部31A又は31Bに突出部35Bが接触したと誤検出してしまうことを防止することができる。
【0124】
以上の構成によれば薬液投与装置1では、ピストン11の位置を検出するために圧力センサを用いないでよい分、装置全体を小型化することができる。
【0125】
〈4.他の実施の形態〉
なお上述した実施の形態においては、ピストン11の直径を0.8mm、シリンダ14の内径を0.81mmとし、ピストン11とシリンダ14との隙間を5μmとした場合について説明した。本発明はこれに限らず、シリンダ14の内径は3mmまでとし、ピストン11とシリンダ14との隙間を2〜20μmとするようにしてもよい。
【0126】
また上述した実施の形態においては、ピストン11を往復移動させるものとして駆動部12及び112を適用するようにした場合についてのべたが、ピストン11を往復移動させるものであれば、例えば、ギアが回転軸に取り付けられたDCモータを回転させ、該ギアを介して送りねじによりピストン11を往復移動させるようにしてもよい。
【0127】
また上述した実施の形態においては、制限部15が吸込側蓋部21、送出側蓋部22、吸込側押付部23及び送出側押付部24により構成され、吸込側押付部23及び送出側押付部24を介して吸込側蓋部21及び送出側蓋部22を吸込管13A及び送出管13Bの他端に押し付けて流路部13の流路を薬液貯蔵部7から使用者の体内へ薬液が流れるよう制限するようにした場合について述べた。本発明はこれに限らず、制限部15の代わりに自動弁又は一方向弁を設け、流路部13の流路を薬液貯蔵部7から使用者の体内へ薬液が流れるよう制限するようにしてもよい。
【0128】
また上述した実施の形態においては、穿刺部5と流路部13が別々に構成されている場合について述べたが、薬液貯蔵部7から外部まで薬液が流れる流路を流路部として一体形成するようにしてもよい。
【0129】
また上述した実施の形態においては、引戻し動作時にもピストン11の移動に基づいて閉塞を検出するようにした場合(ステップSP12〜15、SP29〜SP31)について述べたが、本発明はこれに限らず、引戻し動作時には閉塞を検出しないようにしてもよい。但し、往復時間T1内にピストン11の往復が完了しなければならないので、その所定時間内にピストン11が引き戻らない場合には報知するようにする。
【産業上の利用可能性】
【0130】
本発明は、例えば医療分野に適用することができる。
【符号の説明】
【0131】
1……薬液投与装置、2……下筐体部、3……上筐体部、4……貼付部、5……穿刺部、6……注入部、7……薬液貯蔵部、8……基板部、9……送出部、11……ピストン、12……駆動部、13……流路部、14……シリンダ、15……制限部、31……支持体、32……軸支持体、33……軸体、34……振動体、35……移動体、41……CPU、42……ROM、43……RAM、44……電源部、45……インターフェース部、46……報知部、47……バス。
【特許請求の範囲】
【請求項1】
使用者の体内に薬液を投与するための薬液投与装置であって、
該薬液を貯蔵する薬液貯蔵部と、
前記薬液貯蔵部から使用者の生体内へ薬液を送液する流路を形成する流路部と、
前記流路部の途中に設けられたシリンダ部と、
前記シリンダ部内を摺動するピストンと、
前記ピストンを前記シリンダ部内で摺動させる駆動部と、
前記ピストンを制御する駆動制御部と、
を有し、
前記流路部は、前記薬液貯蔵部と前記シリンダ 部とを接続する流入路と、前記シリンダ部と使用者の生体へと接続される流出路とから成り、
前記流路部は、前記薬液貯蔵部から前記シリンダ部へと薬液が流れるように前記流入路上に設けられた該薬液の流れる方向を制御する第1制御部と、前記シリンダ部から外部前記使用者の生体内へ薬液が流れるように、前記流出路上に設けられた該薬液の流れる方向を制限する第2の制限部とを有し、
前記駆動制御部は、前記ピストンが所定時間に前記シリンダ部内を最も引戻された位置から最も押込まれた位置への移動を検知するピストン検知部を備え、前記ピストン検知部が前記ピストンの所定時間内の移動を検知できなかった場合、前記流路部が閉塞していることを検出する閉塞検出部とを有している
ことを特徴とする薬液投与装置。
【請求項2】
前記駆動部は、
前記ピストンと共に移動する移動部と、
前記ピストンが最も引戻された位置から最も押込まれた位置へ向かう方向に移動した際に、該ピストンが最も押込まれた位置よりも移動しないように前記移動部と当接してピストンの移動を制限する第1の移動制限部と、
前記ピストンが最も押込まれた位置から最も引戻された位置へ向かう方向に移動した際に、該ピストンが最も引戻された位置よりも移動しないように前記移動部と当接してピストンの移動を制限する第2の移動制限部と、
を有し、
前記閉塞検出部は、
前記移動部と、前記ピストン検知部とからなり、前記第2の移動制限部に前記移動部が接触している状態から第1の移動制限部へ前記移動部が接触するまでの時間に基づいて設定される時間で前記ピストンが移動できているかを前記ピストン検知部が検出することにより、前記流路部が閉塞していることを検出する
ことを特徴とする請求項1に記載の薬液投与装置。
【請求項3】
前記移動部、前記第1及び第2の移動制限部は導電性の部材でなり、
前記閉塞検出部は、前記移動部と前記第1又は第2の移動制限部とが接触する際に流れる電流を検出することにより前記移動部と前記第1又は第2の移動制限部とが接触したことを検出する
ことを特徴とする請求項2に記載の薬液投与装置。
【請求項4】
前記第1及び第2の移動制限部は、導電性の部材で一体形成されており、
前記閉塞検出部は、前記移動制限部が前記第1及び第2の移動制限部の一方と接触していることを確認してから、前記設定される時間よりも短い時間以内に前記移動制限部が前記第1及び第2の移動制限部から離れたことを検出できなかった場合、前記流路部が閉塞していることを検出する
ことを特徴とする請求項3に記載の薬液投与装置。
【請求項5】
使用者の体内に薬液を投与するための薬液投与装置における閉塞検出方法であって、
薬液を貯蔵する薬液貯蔵部から使用者の体内へ薬液を送液する流路を形成する流路部に一端が接続されるシリンダの内部で摺動し、前記シリンダの最も引戻された位置から最も押込まれた位置へ移動する際に、前記薬液を前記流路部を介して使用者の体内に送液するピストンを駆動する駆動部を介して、所定時間でピストンが最も引戻された位置から最も押込まれた位置へ移動させるよう前記駆動部を制御する駆動制御ステップと、
前記所定時間に基づいて設定される時間で前記ピストンが最も引戻された位置から最も押込まれた位置へ移動できなかった場合、前記流路部が閉塞していることを検出する閉塞検出ステップと
を有することを特徴とする閉塞検出方法。
【請求項1】
使用者の体内に薬液を投与するための薬液投与装置であって、
該薬液を貯蔵する薬液貯蔵部と、
前記薬液貯蔵部から使用者の生体内へ薬液を送液する流路を形成する流路部と、
前記流路部の途中に設けられたシリンダ部と、
前記シリンダ部内を摺動するピストンと、
前記ピストンを前記シリンダ部内で摺動させる駆動部と、
前記ピストンを制御する駆動制御部と、
を有し、
前記流路部は、前記薬液貯蔵部と前記シリンダ 部とを接続する流入路と、前記シリンダ部と使用者の生体へと接続される流出路とから成り、
前記流路部は、前記薬液貯蔵部から前記シリンダ部へと薬液が流れるように前記流入路上に設けられた該薬液の流れる方向を制御する第1制御部と、前記シリンダ部から外部前記使用者の生体内へ薬液が流れるように、前記流出路上に設けられた該薬液の流れる方向を制限する第2の制限部とを有し、
前記駆動制御部は、前記ピストンが所定時間に前記シリンダ部内を最も引戻された位置から最も押込まれた位置への移動を検知するピストン検知部を備え、前記ピストン検知部が前記ピストンの所定時間内の移動を検知できなかった場合、前記流路部が閉塞していることを検出する閉塞検出部とを有している
ことを特徴とする薬液投与装置。
【請求項2】
前記駆動部は、
前記ピストンと共に移動する移動部と、
前記ピストンが最も引戻された位置から最も押込まれた位置へ向かう方向に移動した際に、該ピストンが最も押込まれた位置よりも移動しないように前記移動部と当接してピストンの移動を制限する第1の移動制限部と、
前記ピストンが最も押込まれた位置から最も引戻された位置へ向かう方向に移動した際に、該ピストンが最も引戻された位置よりも移動しないように前記移動部と当接してピストンの移動を制限する第2の移動制限部と、
を有し、
前記閉塞検出部は、
前記移動部と、前記ピストン検知部とからなり、前記第2の移動制限部に前記移動部が接触している状態から第1の移動制限部へ前記移動部が接触するまでの時間に基づいて設定される時間で前記ピストンが移動できているかを前記ピストン検知部が検出することにより、前記流路部が閉塞していることを検出する
ことを特徴とする請求項1に記載の薬液投与装置。
【請求項3】
前記移動部、前記第1及び第2の移動制限部は導電性の部材でなり、
前記閉塞検出部は、前記移動部と前記第1又は第2の移動制限部とが接触する際に流れる電流を検出することにより前記移動部と前記第1又は第2の移動制限部とが接触したことを検出する
ことを特徴とする請求項2に記載の薬液投与装置。
【請求項4】
前記第1及び第2の移動制限部は、導電性の部材で一体形成されており、
前記閉塞検出部は、前記移動制限部が前記第1及び第2の移動制限部の一方と接触していることを確認してから、前記設定される時間よりも短い時間以内に前記移動制限部が前記第1及び第2の移動制限部から離れたことを検出できなかった場合、前記流路部が閉塞していることを検出する
ことを特徴とする請求項3に記載の薬液投与装置。
【請求項5】
使用者の体内に薬液を投与するための薬液投与装置における閉塞検出方法であって、
薬液を貯蔵する薬液貯蔵部から使用者の体内へ薬液を送液する流路を形成する流路部に一端が接続されるシリンダの内部で摺動し、前記シリンダの最も引戻された位置から最も押込まれた位置へ移動する際に、前記薬液を前記流路部を介して使用者の体内に送液するピストンを駆動する駆動部を介して、所定時間でピストンが最も引戻された位置から最も押込まれた位置へ移動させるよう前記駆動部を制御する駆動制御ステップと、
前記所定時間に基づいて設定される時間で前記ピストンが最も引戻された位置から最も押込まれた位置へ移動できなかった場合、前記流路部が閉塞していることを検出する閉塞検出ステップと
を有することを特徴とする閉塞検出方法。
【図1】


【図2】
【図3】
【図4】
【図5】

【図6】

【図7】
【図8】

【図9】
【図10】
【図11】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【公開番号】特開2012−200419(P2012−200419A)
【公開日】平成24年10月22日(2012.10.22)
【国際特許分類】
【出願番号】特願2011−67897(P2011−67897)
【出願日】平成23年3月25日(2011.3.25)
【出願人】(000109543)テルモ株式会社 (2,232)
【Fターム(参考)】
【公開日】平成24年10月22日(2012.10.22)
【国際特許分類】
【出願日】平成23年3月25日(2011.3.25)
【出願人】(000109543)テルモ株式会社 (2,232)
【Fターム(参考)】
[ Back to top ]