
血液濾過システム及び該血液濾過システムを制御する方法

【課題】患者の血液から流体を除去するための血液濾過システムおよび血液濾過システムを制御する方法を提供する。
【解決手段】このシステムは、排出液、血液、および注入液の流量を連続的にモニタする。必要なとき、この注入液、排出液および血液のポンプ流量を調節して、この血液から予め選択した量の流体を予め選択した時間に除去する。監視制御装置160が、心拍数120および血圧130のような、患者パラメータをモニタし、従ってポンプ流量を調節できる。この監視制御装置160は、所望の流量を達成するように各ポンプ流量を制御するために、および故障状態に対応するために、1組の監視ルールに基づいて、エキスパート決定を行うためにファジィ論理を使う。ファジィ論理は所望の限外濾過速度に依存する幅を有する少なくとも一つのメンバーシップ関数を用いる。
【解決手段】このシステムは、排出液、血液、および注入液の流量を連続的にモニタする。必要なとき、この注入液、排出液および血液のポンプ流量を調節して、この血液から予め選択した量の流体を予め選択した時間に除去する。監視制御装置160が、心拍数120および血圧130のような、患者パラメータをモニタし、従ってポンプ流量を調節できる。この監視制御装置160は、所望の流量を達成するように各ポンプ流量を制御するために、および故障状態に対応するために、1組の監視ルールに基づいて、エキスパート決定を行うためにファジィ論理を使う。ファジィ論理は所望の限外濾過速度に依存する幅を有する少なくとも一つのメンバーシップ関数を用いる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、血液濾過のシステムおよび方法を対象とし、更に詳しくは、一つ以上のモニタした患者パラメータおよび流体流量に基づく患者の血液からの流体および/または可溶性老廃物の連続濾過を制御するための監視制御システムおよび方法並びに適応制御システムおよび方法を対象とする。
【背景技術】
【0002】
病気、けがまたは手術を含む種々の理由で、患者は、自分の血液から溶解した老廃物を含む過剰な流体を取除くために生来の腎機能の補充または補完が必要なことがある。この目的のために知られる幾つかの処置は、透析、血液透析、血液濾過、血液濾過透析および限外濾過があり;もう一つの関連処置は血漿交換である。使用する特定の処置は、その特定の患者の必要性に依る。例えば、透析は、血液から可溶性老廃物および溶媒を除去するために使用し;血液濾過は、血液から血漿水を除去するために使用し;血液濾過透析は、血液から不要な溶質(可溶性老廃物)と血漿水の両方を除去するために使用し;限外濾過は、血液濾過の1種であり;および血漿交換は、血漿交換フィルタによって血漿を除去するために使用する。腎機能補充は、栄養、赤血球生成、カルシウム・燐のバランスおよび患者からの溶媒と溶質の除去に影響するかも知れないので、利用する処置を正確に制御することが必須である。血管内流体体積の除去割合の正確な制御も患者の適正な流体バランスを維持し且つ低血圧を防ぐために重要である。
【0003】
腎臓補充処置をモニタし且つ制御するために種々のシステムが提案されている。例えば、米国特許第4,132,644号は、閉じた液体容器内の透析液の重量を秤で示す透析システムを開示する。透析液が透析器を通過してから、消費した液を同じ容器へ戻し、重量を再び示す。容器が元の透析液と限外濾過液を受けるので、患者から除去した限外濾過液の量は、この容器の全重量の増加に等しい。このシステムは、重量測定装置が決定要因とは成らず、それでこの処置に使用する液体の量を精密制御をするものでない。
【0004】
米国特許第4,204,957号は、患者への代用液の供給を制御するために重量測定を利用する人工腎臓システムを開示する。このシステムでは、患者の血液をフィルタを通して圧送し、この血液からの濾過液を計量装置に関連する測定容器へ排出する。交換液の入った第2測定容器を第2計量装置に関連付け、精製血液管路に接続する。ポンプによって、この交換液および精製血液を患者へ送返す。この第1および第2計量装置を、この第1測定容器で受けた濾過液の重量に依って第2測定容器から一定割合の代用液を精製血液へ供給するような方法で、測定システムによって互いに結合する。このシステムは、血液濾過で循環する透析液は利用しない。
【0005】
米国特許第4,767,399号は、連続動静脈血液濾過(CAVH)を行うためのシステムを開示し、この開示したシステムは、所望量の流体を患者の血液から引出し且つ選択した量の流体体積を患者へ戻すために容積ポンプの利用に頼る。
【0006】
米国特許第4,923,598号は、透析器および/またはフィルタ装置を含む体外血液回路を含む、血液透析および血液濾過のための装置を開示する。このシステムは、この血液回路内の透析器またはフィルタ装置の上流および下流に位置する評価ユニットと共に流れセンサを利用することによって単位時間当りの流体引出しおよび引出した流体の総量を決定する。
【0007】
米国特許第4,728,433号は、差動計量によって限外濾過を調製するためのシステムを開示する。このシステムは、入口室および出口室を有する差動計量容器を含み、それが重量で一定量の新鮮な透析液にこの血液透析器を貫流させる。このシステムは、計量サイクルのシーケンスで動作し、その間に血液から除去した限外濾過液の量を計算できる。その上、各計量サイクルに対する限外濾過速度を計算してもよい。このシステムは、この差動計量容器の入口室および出口室の交互する注排サイクルで患者に透析液を給送しながら、血液から除去した限外濾過液の量を決定および調整するための機構を提供する。
【0008】
ある患者に対しては、腎臓補充処置が数時間または数日にさえ及ぶかも知れない。一般的に、腎臓補充処置をモニタおよび制御するための現在のシステムは、そのような処置を新生児に行うために必要な柔軟性および精度に欠ける。これは、主として使用するポンプの満足な自動制御の欠如による。そのような装置を使用する際に伴う患者の危険のために、保健要員は、患者から取出した流体を時間毎を基準に測定する。取出した流体をモニタすることが継続的に必要であることは、看護ケアのかなりの増加に繋がり、それで治療のコストを増す。従って、これらのシステムの自律性のレベルを、この処置が医療要員に手間が掛らず、従ってコストが掛らないように改善する必要がある。しかし、この自律性向上は、患者の安全性を犠牲にして行うべきでない。
【0009】
ある従来の腎機能補充/補完システムは、単純に故障状態の存在を検出し、警報を出し、およびシステムポンプを消勢してこの処置を止めるという初歩的レベルの監視制御をする。もし、ポンプが消勢中に血液フィルタが凝固したら、配管および血液フィルタを取替えねばならず、同時に患者が感染する機会が増大する。更に、この血液濾過処置は、患者の健康への事によると負の影響で遅滞する。
【0010】
この腎機能補充/補完システムの時変性のために、流体汲出しの動的特性が時間が経つにつれて変化するかも知れない。例えば、配管、フィルタ、およびコネクタのようなシステム部品の特性が、老化または流体流れ経路の閉塞のために、時間が経つにつれゆっくりと変動するかも知れない。流路が収縮すると、増加した流れ抵抗を補償するように、ポンプのポンプ流量を変えなければならない。更に、配管セットの交換は、ポンプ流量の迅速な変更調整を要し、それは、短期間の過渡的変動のために、比較的一定値として最初に確立するのが困難かも知れない。腎臓補充措置をモニタおよび制御するための現在のシステムは、これらの時間依存流量変動を高精度、高速応答、および最小のオーバシュートまたは過渡変動で追従する補正で自律的に補正する能力に欠ける。
【先行技術文献】
【特許文献】
【0011】
【特許文献1】米国特許第5,344,568号
【特許文献2】米国特許第5,211,849号
【特許文献3】米国特許第4,132,644号
【特許文献4】米国特許第4,204,957号
【特許文献5】米国特許第4,767,399号
【特許文献6】米国特許第4,923,598号
【特許文献7】米国特許第4,728,433号
【発明の概要】
【発明が解決しようとする課題】
【0012】
正確、確実で連続長期間運転が可能で、且つ成人、小児および新生児患者に効果的に使える、多目的腎機能補充/補完システムに対する要求がある。更に、この多目的腎機能補充/補完システムを制御し、患者管理を改善しおよび大きな自律性を与えるために、流体の移動を正確に調整し且つこのシステムの全体の挙動をモニタするためのフィードバック制御システムに対する要求がある。
【課題を解決するための手段】
【0013】
本発明は、患者の血液から流体および/または可溶性老廃物を除去するための多目的システムおよび方法:限外濾過だけ、血液濾過透析、血液濾過透析と限外濾過、血液透析、および補液ありまたは無しの血漿交換を対象とする。本発明のシステムおよび方法は、高精度(このシステムを通過する流体の総量に関係なく±2gのオーダの)で確実な、長期間運転(5〜10日)を行うことができる。この発明のシステムおよび方法は、成人、小児および新生児患者に同等に適用できながら、その多目的性、プロセスの反復性および精度、並びに体外血液回路の中の流体の同時、連続流れのために有利である。
本発明による、患者の血液から流体を除去するための血液ろ過システムは、注入液、排出液及び血液ろ過システム内の血液からなるグループから選択された液体を吸い上げる第1のポンプ、前記第1のポンプが発生した前記血液ろ過システム内の流体の流量を測定すると共に上記流体の流量に相関する流量データ信号を提供する第1のセンサ、前記血液ろ過システム内の前記第1のポンプに電気的に接続されて該第1のポンプへ出力信号を伝達することにより前記流体の流量を調整すると共に前記第1の流量センサに電気的に接続されて該第1のセンサから提供される流体の流量データ信号を受け取る監視制御装置、少なくとも一つの患者パラメータを測定するためのモニタであって、上記少なくとも一つの患者パラメータに相関する患者パラメータデータ信号を提供する患者パラメータモニタ、を含み、前記監視制御装置は前記患者パラメータモニタと電気的に接続して該患者パラメータモニタが提供する前記患者パラメータデータ信号を受け取り、前記監視制御装置は流量データ信号及び患者パラメータデータ信号を受け取って、少なくとも一つの監視ルールを用いたファジィ論理と、該ファジィ論理のメンバーシップ関数であって所望の限外濾過速度に依存する幅を有する少なくとも一つのメンバーシップ関数を用いて流量データ信号と患者パラメータデータ信号を解析し、前記第1のポンプを調節するため出力信号を前記第1のポンプへ与えて、必要に応じて周期的に前記第1のポンプから発生された液体の流量を調節して、患者の血液から除去する流体を調整する。
【0014】
ここで使うように、“血液濾過”という用語は、血液透析、血液濾過、血液濾過透析、限外濾過および血漿交換プロセスを含めるように広く解釈すべきである。ここで使うように、“注入液”という用語は、血液濾過処置の一部として患者に供給してもよい、透析液またはその他の交換液を含むと定義する。
【0015】
好適実施例で、本発明のシステムは、血液フィルタ、この血液フィルタを通して患者から血液を汲出し且つ患者へ戻すための血液ポンプ、および汲出した血液を患者に出し入れするための適当な配管を含む。このシステムは、更に、注入液の供給を維持するための第1溜、この注入液の重量を絶えずモニタして、モニタした重量と相関する重量データ信号を発生するための第1計量手段、およびこの第1溜から血液フィルタまたは適当な血液配管アクセス口へ注入液を汲出すための第1ポンプを含む。第2溜が血液フィルタからの排出液(例えば、血液から除去した流体および溶質を含む、消費した注入液または限外濾過液)を受け、第2計量手段が排出液の重量をモニタ、モニタした重量と相関する重量データ信号を発生する。第2ポンプがこの血液フィルタからの排出液を第2溜へ送込む。このシステムは、この血液ポンプ、注入液ポンプ、排液ポンプ並びに第1および第2計量手段に機能するように接続した、コンピュータ化した制御装置も含む。
【0016】
この制御装置は、この処置中、周期的にであるが継続を基準に、所定の間隔でこの第1および第2計量手段が絶えず発生する重量データ信号を問い合せ、それからこの第1および第2溜の中の注入液および排出液の重量をこの所定の間隔で決定するように設計してある。血液から引出す流体の流量も決定する。この制御装置は、注入液および排出液重量を制御装置のメモリの中の対応する所定の計算した重量と比較し、必要なとき、患者の血液から予め選択した量の流体の除去を達成するために、制御装置は、制御信号を発生し、それが注入液および排出液ポンプのポンプ流量を自動的に調節する。その上、この制御装置は、血液ポンプが運転しているときだけ注入液および排出液ポンプを運転するようにプログラムしてある。更に、血液ポンプは、血液から所望のレベルの流体除去を達成するために必要に応じて血液フィルタを通る血液の流量を変えるために、重量データ信号に応じてまたはそれと独立に制御装置が発生する制御信号に機能するように接続してあり且つそれに応答する。
【0017】
代替実施例では、このコンピュータ制御装置が、操作員の初期選択によって、患者に機能するように接続した一つ以上の種々のモニタシステムと連結してある。この技術で周知の、これらのモニタシステムは、モニタした患者パラメータに対応するデータ信号を発生し且つ出力し、このコンピュータ制御装置がそのようなデータ信号を受ける。血液濾過作業中、連結したパラメータを絶えずモニタするが;しかし、この制御装置は、操作員が選択した患者パラメータに対応する特定のパラメータデータにしか応答しない。モニタでき且つこのコンピュータ制御装置と連結してある患者パラメータには次のものがある:動脈圧、中央静脈圧、肺動脈圧、平均動脈圧、毛管楔入圧、全身血管抵抗、心拍出量、O2およびCO2、含有量および飽和量(静脈または動脈)、血圧、心拍数、患者体重、外部注射速度、およびヘマトクリット。多数のこれらのパラメータをモニタしてもよく、既知の方法で発生した対応する出力データ信号は、留置静脈内または動脈内カテーテルを利用する。残りのパラメータをモニタし、この技術で周知の手段によってデータ信号を発生する。操作員は、上記パラメータの一つ以上を選択して制御装置と連結し、次にその装置が処置中に周期的であるが、継続を基準に、連結したモニタシステムが絶えず発生するパラメータデータ信号を所定の間隔で問い合せる。次にこの制御装置は、このパラメータデータをそれに応答して評価し、必要なとき、制御装置が制御信号を発生し、それが患者の利益と安全のために患者の血液から予め選択した量の流体を除去するように、注入液、排出液および血液ポンプのポンプ流量を自動的に調節する。
【0018】
本発明のシステムは、上に第1実施例に関連して説明したように、注入液および排出液重量データ信号のモニタと応答の組合せを、この制御装置に連結した他の患者パラメータの一つ以上に加えて利用してもよいことが分るだろう。
【0019】
特別な例として、患者の体重のモニタと関連して、このコンピュータ制御装置は、患者の体重の連続値を提供するベッド秤に連結してもよい。全部の患者体重データ信号に応答して、このコンピュータ制御装置は、患者の体重を時が経つにつれて減少または増加するための予め設計した計画を実現するために注入液および/または排出液ポンプを制御するかも知れない。患者体重の増加または減少は、適切なポンプ制御によって時間に関して線形または非線形方式で達成できる。同様に、このコンピュータを患者のO2飽和度の連続読取り装置に連結してもよく、そうすればこの制御装置がこのO2飽和度を受け、評価し且つ注入液、排出液および血液のポンプ流量を制御することによって応答し、それによって患者の酸素付加を最適化するだろう。
【0020】
全ての上述のモニタパラメータに関連して、このコンピュータ制御装置は、患者に機能するように接続した適当な信号発生装置または発生源から各特別に選択したパラメータに対応し且つ関係するデータ信号を受けるだろう。そこでこの制御装置は、周期的問合せの後に、これらの問合せ値を所定の所望値と比較し、自動的に注入液、排出液および血液のポンプ流量にモニタした信号に応じた、適当な所定の変更を行うだろう。更に、上に参照したパラメータの二つ以上を連続的に同時にモニタすることができ、およびこのコンピュータは、一つ以上の特定のパラメータを他のものより考慮する階層構造でプログラムしてもよく、これらの選択したパラメータに基づいて注入液、排出液および血液のポンプ流量の適当且つ所望の調節で応答する。
【0021】
このコンピュータ制御装置は、選択したモニタパラメータの観察した変化に線形応答または非線形(曲線状)応答を与えるように、注入液、排出液および血液ポンプのポンプ流量(ポンプ速度)を調節するように設計およびプログラムしてある。これに関して、“線形”は、一定の、非指数型の変化を意味し、および“非線形”または“曲線状”は、線形以外のあらゆるものを意味する。線形対非線形応答特性の選択は、このシステムの操作員が患者の要求に基づいて行う。例えば、ある場合には、最初は流体除去速度が速く、時間が経つと減少するのが望ましいかも知れない。その場合、曲線状または指数型応答を利用するだろう。他の状況では、時間が経っても安定したまたは一定の流体除去が望ましく、それで線形応答特性を選択する。更に、操作員の選定で、このコンピュータ制御装置は、所望の応答特性を達成するためにポンプ流量を調製するように、線形および曲線状応答信号を組合わせてもよいことを意図する。例えば、最初に流体を急速に除去する非線形初期応答期に続いて、一定の流量で流体を継続除去する線形応答期が設定される。
【0022】
更にもう一つの代替実施例では、コンピュータ制御装置が、他の点ではこの血液濾過システムと独立の、一つ以上の患者注入液ポンプからデータ信号を受ける。これらの注入液ポンプは、患者への静脈内液、医薬品、非経口栄養剤および/または血液製剤の注入のために使う。これらの独立の注入液ポンプからのデータ出力をモニタすることによって、単位時間当りの外来総流体体積を確認できる。すると、制御装置は、必要に応じて、経静脈輸液療法の変化に応じて自動的に限外濾過速度および/または注入液流量を変えるように、要求に応じて、このシステムの注入液、排出液および血液ポンプのポンプ流量を変えるだろう。これは、血液濾過を行いながら、独立の患者管理を容易にするだろう。独立の注入液ポンプを備える制御装置の適切な調整が、血液濾過による所望のまたは対象とする流体除去目標を進行中の経静脈輸液療法に従って自動的に達成できるようにする。
【0023】
付加的代替実施例では、このコンピュータ制御装置が、それぞれの流体のポンプ流量を制御するためにこのシステムの注入液、排出液および血液のポンプの一つ以上に機能するように接続した監視制御システムを組込む。この監視制御装置は、流量計が与える血液ポンプのポンプ流量並びに電子秤が与える重量データ信号の変化率からの注入液および排出液ポンプのポンプ流量に関する、これらの流体の流量と相関する、フィードバック信号を受け且つ利用する。この監視制御装置は、血圧モニタからの血圧データ信号または心拍数モニタからの心拍数データ信号のような、患者パラメータモニタから得た患者パラメータも受け且つ利用する。この監視制御装置は、これらの信号を、少なくとも一つの所定の監視ルールに基く、ファジィ論理を利用して解析し、適当なポンプに、必要に応じて周期的継続を基準に、そのポンプによって生じた流体の流量を調節するために出力信号を供給する。例えば、1組の監視ルールが、心拍数および血圧が高いか、正常か、または低いかに基づいて、限外濾過速度の増加または減少を、または故障状態によるこの処置の中止さえ決めてもよい。
【0024】
更に追加の代替実施例では、このコンピュータ制御装置が、このシステムの注入液、排出液および血液ポンプの少なくとも一つのポンプ流量を制御するために適応制御システムを組込む。この適応制御装置は、適応制御すべき各ポンプにおよびその関連する流量センサに機能的に接続してある。この適応制御装置は、制御されるポンプが発生した流体の流量を測定する、流量計または重さ秤のような、センサからの流体流量に相関する流量データ信号を受ける。この適応制御装置は、この流量の所定の流量からの時間依存偏差を補正するための1組の制御装置パラメータを発生するために適応法則を使って制御装置パラメータベクトルを計算する。これらの制御装置パラメータに基づいて、この適応制御装置は、次に制御法則を使用して、所定の流量を達成するためにこのポンプが発生した流体のポンプ流量を調節するための出力信号を発生する。最後に、この制御装置は、このポンプに、周期的継続を基準に、流体流量を調節するための出力信号を提供する。一つの側面で、この適応制御装置は、ポンプをポンプ運転の線形状態に維持するように出力信号の範囲を制限するためにパラメータ予測を使ってもよい。
【0025】
本発明による患者の血液から流体を除去する血液ろ過システムを制御する方法は、 第1のポンプを用いて血液ろ過システム内の、注入液、排出液、血液からなるグループから選択された流体を汲出す工程と、監視制御装置により流体の流量を測定して、上記流体の流量に相関する流量データ信号を発生する工程と、患者パラメータをセンサによって測定して、前記患者パラメータと相関する患者のデータ信号を発生する工程と、前記監視制御装置によって患者パラメータデータ信号を測定して患者パラメータデータ信号を発生する工程と、前記監視制御装置によって前記流量データ信号と患者パラメータデータ信号を、少なくとも一つの監視ルールを有するファジィ論理の推論エンジンを用いて分析する工程とを含み、該ファジィ論理の推論エンジンに用いられる少なくとも一つのメンバーシップ関数の幅が所望の限外濾過速度に依存し、更に、前記流量データ信号と患者パラメータデータ信号の前記分析に応答して前記監視制御装置により周期的且つ継続的に流体流量を調節して、患者の血液からの液体の除去を調節する工程とを備える。
本発明の方法の好適実施例では、患者からの血液を血液フィルタを通して汲出し、第1溜に保持してある注入液の補給をこの第1溜からこの血液フィルタを通して、この血液に逆流して汲出す。この第1溜の中の注入液の重量を絶えずモニタし、その重量に相関するデータ信号を発生する。排出液(例えば、消費した注入液)をこの血液フィルタから汲出し、第2溜で受ける。この第2溜の中の排出液の重量を絶えずモニタし、それに相関するデータ信号を発生する。注入液および排出液の重量に相関する信号をシステム制御装置によって規則的間隔に(例えば、毎分)問い合せ、この制御装置のメモリの中の対応する所定の計算した重量と比較する。この制御装置は、患者の血液からの流体の引出し量および速度を決定する。もしこれらの値が所定の、予めプログラムした所望値と異なるならば、制御装置は、所望量の流体除去を達成するように、注入液および排出液ポンプのポンプ流量を独立に調節する制御信号を発生する。これらの制御信号は、血液ポンプ流量も制御してよい。
【0026】
本発明の方法の代替実施例では、注入液および排出液重量モニタ並びにポンプ制御と独立にまたはそれらに加えて、このコンピュータ制御装置が先に議論したモニタシステムの一つ以上と連結してもよい。この実施例では、制御装置は、選択した患者パラメータデータを受け、評価しおよび所望量の流体除去を達成するために注入液、排出液および血液のポンプ流量を制御する、適当な、応答制御信号を発生することによって応答する。これは、注入液および排出液重量モニタと組合わせてまたは独立に達成してもよい。
【0027】
本発明の方法の代替実施例では、血液濾過システムのポンプが発生した流体流の流量データ信号並びに、心拍数および血圧のような、患者パラメータデータ信号を監視制御装置へ供給する。流量データ信号は、注入液か排出液の重量の変化率から、または血液流量から得る。これらの信号を少なくとも一つの所定の監視ルールに基づくファジィ論理を使って解析し、出力信号を適当なポンプに、必要に応じて周期的継続を基準に、そのポンプが発生する流体の流量を調節するために提供する。
【0028】
本発明の方法の更にもう一つの代替実施例では、血液濾過システムのポンプが発生した流体流に対する流量データ信号を適応制御装置に供給する。流量データ信号は、注入液か排出液の重量の変化率から、または血液流量から得る。1組の制御装置パラメータを、流量の所定の流量からの時間依存偏差を補正する際に使うためにこれらの流量信号から発生させる。これらの信号およびパラメータを、出力信号を発生するために制御法則を使って解析する。この出力信号を、周期的継続を基準に、適応制御するポンプにあたえる。
【0029】
本発明のシステムおよび方法の利点は、少なくとも一部、もし必要ならば、患者の血液からの理想的または理想に近い流体除去を達成するための、流体重量、およびその他の選択した患者パラメータデータの連続モニタおよび周期的問い合せ、並びに、血液ポンプ流量を含む、それに反応する流体ポンプ流量の調節によって達成する。更に、この監視システム制御装置および適応システム制御装置は、ポンプ流量を精密且つ正確に調節および制御する、閉ループ、フィードバック制御システムを実現する。本発明のシステムおよび装置の更なる特徴および利点は、添付の図面および以下の詳細な説明を参照すれば明白となろう。
【図面の簡単な説明】
【0030】
【図1】本発明のシステムの一実施例の図表示であり;変形を仮想線で示す。
【図2】本発明のシステムの代替実施例の図表示である。
【図3】血液濾過システム用階層制御アーキテクチャを図式的に示す。
【図4】図3の監視制御装置によって行われるファジィ論理過程を図式的に示す。
【図5】この監視制御装置で実現した監視制御アーキテクチャを表す。
【図6A】ファジィ論理制御システムに入力した血圧データ信号用の1組のメンバーシップ関数である。
【図6B】ファジィ論理制御システムに入力した心拍数データ信号用の1組の入力メンバーシップ関数である。
【図6C】ファジィ論理制御システムから出力される限外濾過速度の変化を表す信号用の1組の出力メンバーシップ関数である。
【図7A】限外濾過シミュレーション用血液ポンプの追跡誤差のグラフ表示である。
【図7B】限外濾過シミュレーション用制御電圧のグラフ表示である。
【図7C】限外濾過シミュレーション用制御装置パラメータのグラフ表示である。
【図8A】限外濾過シミュレーション用血液ポンプ追跡誤差のグラフ表示である。
【図8B】限外濾過シミュレーション用排液ポンプ追跡誤差のグラフ表示である。
【図8C】限外濾過シミュレーション用第1補充ポンプ追跡誤差のグラフ表示である。
【図8D】限外濾過シミュレーション用第2補充ポンプ追跡誤差のグラフ表示である。
【図9A】限外濾過シミュレーション用排液ポンプ追跡誤差のグラフ表示である。
【図9B】限外濾過シミュレーション用制御電圧のグラフ表示である。
【図9C】限外濾過シミュレーション用制御装置パラメータのグラフ表示である。
【図10A】限外濾過シミュレーション用心拍数のグラフ表示である。
【図10B】限外濾過シミュレーション用血圧のグラフ表示である。
【図10C】限外濾過シミュレーション用のファジィシステムIで計算した所望の排液流量のグラフ表示である。
【図11A】限外濾過シミュレーション用心拍数のグラフ表示である。
【図11B】限外濾過シミュレーション用血圧のグラフ表示である。
【図11C】限外濾過シミュレーション用のファジィシステムIIで計算した所望の排液流量のグラフ表示である。
【図12A】限外濾過シミュレーション用心拍数のグラフ表示である。
【図12B】限外濾過シミュレーション用血圧のグラフ表示である。
【図12C】限外濾過シミュレーション用のファジィシステムIIIで計算した所望の排液流量のグラフ表示である。
【図13A】限外濾過シミュレーション用心拍数のグラフ表示である。
【図13B】限外濾過シミュレーション用血圧のグラフ表示である。
【図13C】限外濾過シミュレーション用のファジィシステムIVで計算した所望の排液流量のグラフ表示である。
【図14A】限外濾過シミュレーション用心拍数のグラフ表示である。
【図14B】限外濾過シミュレーション用血圧のグラフ表示である。
【図14C】限外濾過シミュレーション用のFSIIIで計算した所望の排液流量のグラフ表示である。
【図14D】限外濾過シミュレーション用血液ポンプ流量のグラフ表示である。
【実施例】
【0031】
図1は、本発明のシステムの好適実施例の図表示を示す。図1の仮想線で示す部分は、以下に説明する、本発明の代替実施例を表す。血液濾過システム10は、全体を12で示す適当な制御装置によって運転および制御する。制御装置12は、ディスプレイ13を有するプログラム可能コンピュータでもよく、以下に詳細に説明するように、血液濾過システム10の種々の部品に機能するように接続してある。
作動する際、血液ポンプ16によって、血液を、成人、小児または新生児でもよい患者(図示せず)から適当なカテーテル(図示せず)および入力配管14を介して汲出す。血液ポンプ16は、ローラ型であるのが好ましく、線18によって制御装置12に機能するように接続してある。一つの適当な血液ポンプは、米国ミネソタ州ミネアポリスのレーナルシステムズが製造するRS−7800ミニポンプである。患者の血液を通す入力配管14は、ポンプ16の上流に圧力変換器20を含むのが好ましい。圧力変換器20は、線21を介して制御装置12に機能するように接続してある。医薬品およびヘパリンのような抗凝血配合物を含む所望の流体を患者の血液に注射または注入できるために入力配管14にアクセスするための手段が血液ポンプ16の下流に含めてある。そのような流体の血液への注射または注入は、何か適当な方法で達成してもよく;図1は、注射器および管装置22を図式的に示すが、同じ目的で他の手段を使ってもよいことが分るだろう。
【0032】
患者の血液を血液ポンプ16によって血液フィルタ24を通して圧送する。本発明のシステムに使うのに適する型式のフィルタは、容易に入手でき;適当な血液フィルタの一例は、米国マサチューセッツ州デンバーのアミコンが製造するダイアフィルタである。本システムを血漿交換を行うために使用する場合、米国カリフォルニア州アービンのパーカ・ハンニフィンが製造するプラズマフロのような、適当な血漿交換フィルタを使うことができる。
【0033】
入力配管14は、血液フィルタ24の僅かに上流に第2圧力変換器26を含む。圧力変換器26は、線28を介して制御装置12に機能するように接続してある。患者の血液は、血液フィルタ24を出て、出力配管30を通過し、および静脈カテーテル装置(図示せず)のような何か適当な手段を介して患者へ戻される。出力配管30は、このシステムに血流があることを検証する適当な血流検出器31および気泡が患者へ通過するのを防ぐための気泡クランプ32のような気泡/泡制御装置を含むのが好ましい。血流検出器31および気泡クランプ32は、制御装置12に機能するように接続(図示せず)してもよく、または直接ポンプに接続して血液中に気泡を検出するとまたは血流が停止すると全てのポンプをインタロックしてもよい。適当な泡−気泡検出器は、レーナルシステムズが製造するRS−3220Aである。出力配管30も血液フィルタ24の直ぐ下流に圧力変換器34を含むのが好ましい。圧力変換器34は、線36を介して制御装置12に機能的に接続してある。
【0034】
第1溜50がここでは一般的に注入液52と呼ぶ、適当な透析液またはその他の流体の供給を維持する。注入液の入った溜50を、線56を介して制御装置12に機能的に接続してある電子秤54のような計量装置によって支持してある。注入液52を、好ましくはローラ型である、注入液ポンプ60によって配管58を介して溜50から汲出す。この目的に適当なポンプは、米国オハイオ州クリーブランドのペムコが製造する31/2”(88.8mm)ローラポンプである。注入液ポンプ60は、線62を介して制御装置12に機能的に接続してあり、注入液52を血液フィルタ24を通してそこを通る血液に逆流して圧送する。既知の原理によれば、注入液52は、血液フィルタ24を通過する血液からある成分(流体および/または可溶性老廃物)を抽出するかも知れない。血液フィルタ24から排出した流体は、消費した注入液および血液から除去した成分を含み、それらをここでは排出液76と呼ぶ。システム10を、例えば、血漿交換を行うために、流体または血漿交換システムとして使用する代替実施例では、溜50から(血漿でもよい)注入液を配管59(仮想線で示す)を介して血液出力配管30へまたは配管59a(やはり仮想線で示す)を介して入力配管14へ送込み、それによって血液から除去した流体量を補充する。この実施例で、血液フィルタまたは血漿交換フィルタ24からの排出液76は、注入液を血液出力配管30または入力配管14へ直接送込み、患者へ供給するので、消費した注入液を何も含まない。
【0035】
排出液76は、好ましくはローラ型でありおよび注入液ポンプ60と同じでもよい、排液ポンプ66によって血液フィルタ24から出力配管64を通して汲出される。排液ポンプ66は、線68を介して制御装置12に機能的に接続されている。排液ポンプ66は、血液フィルタ24の下流、排液ポンプ66の上流に圧力変換器70を含むのが好ましい。圧力変換器70は、線72を介して制御装置12に機能的に接続してある。出力配管64も、もし血液フィルタ24が破損すると起るかも知れない、排出液76内の血液の存在を検出する血液漏れ検出器67を含むのが好ましい。適当な血液漏れ検出器67は、米国コロラド州レークウッドのコーベが500247000型として販売する。血液漏れ検出器67は、制御装置12に機能的に接続(図示せず)してもよく、またはこれらのポンプに直接接続して排出液中に血液を検出すると全てのポンプをインターロックしてもよい。血液フィルタ24から汲出した排出液76は、排出液を収集する第2溜74に送込む。第2溜74は、線80を介して制御装置12に機能するように接続してある、電子秤78のような計量装置で支持してある。
【0036】
秤54および78は、米国マサチューセッツ州アクトンのセトラが販売する140CO型でもよく、溜50および74に、それぞれ、入っている注入液および排出液の重量と相関する重量データ信号を絶えず発生する。これらの重量データ信号は、絶えず制御装置12へ送り、それにはこれらの秤が、RS−232インタフェースのような、データプロトコルを有するインタフェースを介してリンクしてある。2台の秤の代りに単一秤を利用でき、それによって溜50と74の間の重量差をモニタし、対応するデータ信号を発生することが分るだろう。圧力変換器20、26、34および70は、全て血液濾過システム10のそれらそれぞれの場所で圧力を絶えず測定し、それに相関する圧力データ信号を発生し、それらを制御装置12へ送る。適当な型式の圧力変換器は、米国コロラド州レークウッドのコーベが販売する型番042−904−10である。このシステム10にこれらの圧力データ信号によって表されるような、ある所定の警報または危険状態が存在するとき、この制御装置は、注入液、排出液、若しくは血液のポンプ流量、若しくはそれらの組合せを調節するか、またはこのシステムを完全に運転停止する。
【0037】
制御装置12は、圧力変換器20、26、34および70、第1および第2秤、それぞれ、54および78、並びに血液ポンプ16、注入液ポンプ60、および排液ポンプ66を含む補助装置からの信号を送受信できる、プログラム可能コンピュータであるのが好ましい。作動する際、制御装置12は、規則的間隔で、この第1および第2秤、54および78が発生する重量データ信号を問い合せる。これらの信号から、制御装置12は、第1および第2溜の中の注入液および排出液の重量をその時点で決定し、これらの重量を制御装置12にプログラムし且つ記憶してある、対応する所定の計算した重量と比較する。溜50の中の注入液の重量および溜74の中の排出液の重量を規則的な間隔でモニタすることによって、これらの重量の変化速度および血液濾過速度を制御装置12のコンピュータ部分によって計算できる。これらの重量が所定の計算した重量から逸脱するとき、および/または血液濾過速度が所定の、プログラムした所望の速度から逸脱するとき、制御装置12は、必要に応じて、血液ポンプ16、注入液ポンプ60および排液ポンプ66を運転する速度を制御または調節する制御信号を発生して、この血液濾過速度を所望の速度へ調節し、または予め選択した限界に達したときこれらのポンプを停止する。これは、血液濾過の所望の量および/または速度を実現するために、連続した方法;即ち、必要に応じて、連続重量データ信号発生、これらの重量データ信号の周期的問い合せおよび必要な重量および/または速度情報の計算、所定の計算値との比較およびこれらのポンプのポンプ流量の自動調節で達成する。
【0038】
制御装置12は、血液ポンプ16が運転しているときだけ、注入液ポンプ60および排液ポンプ66が運転するようにプログラムしてある。限外濾過を行っている場合、排液ポンプ66のポンプ流量は、注入液ポンプ60のポンプ流量プラス所望の限外濾過速度に等しくなければならない。
【0039】
制御装置12は、絶えず圧力変換器20、26、34および70から圧力データ信号を受け、モニタする場所の何れかで高および低圧力限界を超えるとき、警報信号を発生するようにプログラムしてある。更に、特に圧力変換器26、34および70によってモニタする、血液フィルタ24を跨ぐ圧力差が所定の上限を超えるとき、警報信号を発生する。その上、制御装置12は、例えば、もしこのシステムの配管が閉塞または破損し、またはもしポンプの閉塞が起ったならば起るかも知れないような、予め選択した圧力限界(高または低)を超えるとき、これらのポンプを止めるかも知れない。最後に、制御装置12は、溜50の中の注入液レベルが所定の下限に達するとき、および溜76の中の排出液レベルが所定の上限に達するとき、信号を出すかも知れない。血液濾過システム10は、血液および注入液温度を所望のレベルに調節しおよび/または維持するために、適当な血液加温および注入液加温装置(図示せず)も含むかも知れない。そのような装置も、流体温度が予め選択した限界外であるとき、警報信号を発生するかも知れない。
【0040】
ディスプレイ13は、圧力、圧力差、温度、注入液、排水および限外濾過の流速および量、並びに警報状態のような、測定し且つ計算したパラメータの更新した表示を提供する。制御装置12は、可視と可聴の両方の警報を発生し、全てのポンプが警報状態の下でその運転を防ぐためにインタロックしてある。ユーザは、綿密な監督の下で処置を行うために、これらの警報(警報の可聴部分とそのポンプとのインタロック)を使用禁止または無能にする選択肢を有する。プリンタ(図示せず)が制御装置12に機能するように接続(図示せず)してあり、目下表示したまたは規則的間隔で記憶した処置データのハードコピーを、処置が完了したときまたは任意の所望のときに発生する。
【0041】
血液濾過システム10は、二つのモード:1)血液ポンプ16、注入液ポンプ60および排液ポンプ66のポンプ流量が、固定電圧を印可するとき制御装置12によって与えられる手動モード;および2)これらのポンプが制御装置12に所望の血液濾過量または速度をプログラムしたとき、この制御装置によって制御される自動モードの一つで運転できる。この自動モードは、このシステムを休止して先に測定し且つ計算したデータを失うことなく後に続けることを可能にする。
【0042】
図2は、本発明の血液濾過システム10の幾つかの代替実施例の代表的なものを図表示する。図1に描くシステムと比較して図2のシステムの多くの部品の共通性のために、類似の参照番号は、類似の部品を示すことを意図する。更に、図2のシステム部品は、図1に示し且つ上に説明した対応するシステム部品と同様に作用する。入力配管14は、更に、血液フィルタ24の僅かに上流に流量計または流量プローブ27を含む。この流量プローブ27は、線29を介して制御装置12に機能的に接続してある。適当な流量プローブ27は、トランソニック・システムズ社が製造する超音波流量プローブである。他の適当な型式の流量計には、ベアリングレス回転式流量計、ドップラ流量計、および差動電磁流量計がある。
【0043】
図2の血液濾過システムは、更に、制御装置12と、血液ガス100、ヘマトクリット110、患者の心拍数120、患者の血圧130およびその他の多数の患者パラメータ(全体を140で示す)のような選択した患者パラメータに対応するパラメータデータ信号を発生するモニタシステムとの間のインタフェースを含み、この他のパラメータは、以下のものの一つ以上でもよい:動脈圧、中央静脈圧、肺動脈圧、平均動脈圧、毛管楔入圧、全身血管抵抗、心拍出量、呼気終末O2およびCO2、中心および周辺体温、並びに患者体重。血液ガスセンサ100とヘマトクリットセンサ110は、入力配管14に接続してあるとして図示するが、これらのパラメータは、配管14を介してでなく患者に直接関連する手段によってモニタすることもできる。実際、静脈O2飽和度を図示のように測定できるので、動脈O2飽和度は、モニタを他の場所にする必要があるだろう。全患者体重パラメータは、この技術で周知のように、標準患者ベッド秤(図示せず)を利用してモニタできる。
【0044】
この血液濾過処置中、種々の患者パラメータの一つ以上を絶えずモニタし、この制御装置は、操作員の選択で、この制御装置に供給される選択されたパラメータに応答するだろう。このパラメータデータは、この制御装置によって注入液および排出液重量データ信号と独立に評価および応答されてもよく;即ち、このシステムは、重量データ信号ではなく、選択されたパラメータの一つ以上に基づいて動作および応答してもよく;またはこのシステムは、重量データ信号と選択されたパラメータの一つ以上との組合せに応答してもよい。
【0045】
一つ以上の独立の患者注入ポンプ150が、患者への静脈内液、医薬品、非経口栄養剤および/または血液製剤の注入に相関するデータ信号を供給するためにコンピュータ制御装置12とインタフェースで接続してもよい。制御装置12は、このデータを評価し、これらの注入ポンプによって患者へ給送する外部からの流体を補償するように、注入液、排出液および血液のポンプ流量に修正を施す。これに関して、患者の全体の流体バランスをこの血液濾過処置と同時に管理できる。
【0046】
システム10を限外濾過処置または血液透析処置を行うために使う代替実施例では、溜50からの注入液(それは、カルシウム補充液または重炭酸塩補充液のような補充液の一つ以上でもよい)を配管59(仮想線で示す)を介して血液出口配管30へ、または配管59aを介して入力配管14へ送込み、それによって血液から除去した物質および液量を埋め合せる。この実施例で、血液フィルタ24からの排出液76は、注入液を直接血液出力配管30へ送込んで患者へ供給するので、消費した注入液を何も含まない。更にもう一つの代替実施例では、別の補充液を、一つ以上の注入液ポンプ60を有するシステムによって提供してもよい。例えば、注入液ポンプ60が配管59を介して血液出口配管30に第1補充液を給送するための第1注入液ポンプでもよく、且つこのシステム10は、更に、1本の配管(図示しないが配管59に類似する)を介して血液出口配管30に第2補充液を給送するための第2注入液ポンプ(図示せず)を含む。
【0047】
図3は、以後まとめて限外濾過処置と呼ぶ、限外濾過または血液透析処置を行うために血液濾過システム10でポンプ流量を制御するために図2のコンピュータ制御装置12によって実施できる階層制御アーキテクチャを表す。図1および図2に描くシステムと比較して図3のシステムの多くの部品の共通性のために、類似の参照番号は、類似の部品を示すことを意図する。更に、図3のシステム部品は、図1および図2に示し且つ上に説明した対応するシステム部品と同様に作用する。ここに開示する階層制御アーキテクチャは、“連続静-静脈血液濾過のインテリジェント制御”エフレインO.モラール、修士論文、シンシナティ大学、電気およびコンピュータ技術並びにコンピュータ科学部、および“連続静-静脈血液濾過の階層的適応および監視制御”エフレインO.モラール、マリオスM.ポリカーパス、ナット・ヘマシルピン、およびジョンJ.ビスラー、(発表のIEEE制御システム技術会報へ提出)、に記載してあり、その双方を参考とされたい。
【0048】
図3を参照して、この監視制御装置160は、血液ポンプ16、排液ポンプ66、および1対の注入液ポンプ60、即ち、炭酸塩補充ポンプ60aおよびカルシウム補充ポンプ60bを制御する。ポンプ60a、60bは、この限外濾過処置中に患者から除去した液量を補充するために補充液を提供する。患者へ供給する各補充液の実際に重量ωrep1(n)、ωrep2(n)は、サンプル周期nの頻度で、それぞれ、電子秤54a、54b(各秤は、図2に示す秤54に類似する)によってモニタする。典型的限外濾過処置では、このサンプル周期が1秒のオーダである。この排出液の実際の重量ωdra(n)は、電子秤78によってモニタする。この限外濾過速度は、排出液重量の変化率と補充液重量の変化率の間の差として計算する。血液ポンプ16からの実際の流量qblo(n)を流量プローブ27によって得られる。
【0049】
血液ポンプ16は、制御装置12で実現し且つ監視制御装置160によって基準指令入力として計算した所望の流体流量q*blo(n)を受ける適応ポンプ制御装置162によって制御する。このポンプ制御装置162は、所望のポンプ流量に対応し且つq*blo(n)に比例する電圧ublo(n)を伝達するために線18を介して血液ポンプ16に機能的に接続してある。流量プローブ27によって測定した実際の流量qblo(n)は、線29を介して監視制御装置160におよびポンプ制御装置162にフィードバック信号として与える。ポンプ制御装置162は、更に、追跡性能を示す制御装置パラメータベクトルθbloを監視制御装置160に与える。
【0050】
排液ポンプ66は、制御装置12で実現し且つ監視制御装置160によって基準指令入力として計算した所望の重量信号ω*dra(n)を受ける適応ポンプ制御装置170によって制御する。このポンプ制御装置170は、所望のポンプ流量に対応し且つω*dra(n)の変化率に比例する電圧udra(n)を伝達するために線68を介して排液ポンプ66に機能的に接続してある。秤78によって測定した実際の重量ωdra(n)は、線80を介して監視制御装置160におよびポンプ制御装置170にフィードバック信号として与える。ポンプ制御装置170は、更に、追跡性能を示す制御装置パラメータベクトルθdraを監視制御装置160に与える。
【0051】
重炭酸塩補充ポンプ60aおよびカルシウム補充ポンプ60bは、共に制御装置12で実現し且つ監視制御装置160によって基準指令入力として計算した所望の重量信号ω*rep1(n)、ω*rep2(n)を受けるそれぞれの適応ポンプ制御装置180a、180bによって制御する。このポンプ制御装置162は、所望のポンプ流量に対応し且つそれぞれω*rep1(n)、ω*rep2(n)の変化率に比例するそれぞれの電圧urep1(n)、urep2(n)を伝達するために、それぞれの線62a、62b(図2に示す線62に類似)を介してそれぞれのポンプ60a、60bに機能的に接続してある。それぞれの秤54a、54bによって測定した実際の重量ωrep1(n)、ωrep2(n)は、線56a、56bを介して、それぞれ、監視制御装置160におよびそれぞれのポンプ制御装置180a、180bにフィードバック信号として与える。各ポンプ制御装置180a、180bは、更に、所望の流量と実際の流量の間の追跡性能を示すそれぞれの制御装置パラメータベクトルθrep1、θrep2を監視制御装置160に与える。
【0052】
監視制御装置160は、ポンプ16、60a、60b、66を各々線形システムと見做せるように、入力飽和非直線性を除去するためにパラメータ予測機能を使用する。制御装置パラメータの適応は、例えば、配管直径の変化および血液フィルタ特性の劣化、変化、または血液管路の流れ抵抗の変化のために、流量に時間変動があっても、ポンプ制御装置162、170、180a、180bの追跡の向上を可能にする。
【0053】
もしそれぞれの印加電圧udra(n)、urep1(n)、urep2(n)がポンプ運転の直線領域に限られるなら、補充ポンプ60a、60bおよび排液ポンプ66を各々時変自動回帰移動平均(ARMA)適応制御アルゴリズムによって適切にモデル化する。この適応制御アルゴリズムは、次のように表せる:
ω(n)-b*1(n-1)ω(n-1)+b*2(n-1)ω(n-2)=a*0(n-1)+a*1(n-1)u(n-1)
それは、実際の重量ωdra(n)、ωrep1(n)、ωrep2(n)および対応する印加電圧udra(n)、urep1(n)、urep2(n)に関係する。それぞれのシステムパラメータの独特の組a*0、a*1、b*1、b*2を各ポンプ60a、60b、66に付与する。これらのシステムパラメータa*0、a*1、b*1、b*2は、外乱がないときにゆっくりと変動すると仮定した未知の時変パラメータであり、a*1は、このポンプモータがローラを逆方向に回転することは決してないので、正と決め込む。バイアスパラメータa*0は、ポンプが非ゼロ電圧に対して流体流れを誘発しないことが可能であるので、この式に含める。
【0054】
所望の重量信号ω*(n)を追跡するように設計した、直接適応制御方式を使って、この制御電圧を次の式から決める:
u(n-1)=θT(n-1)φ(n-1)
θT(n-1):=[θ1(n-1)θ2(n-1)θ3(n-1)θ4(n-1)]
φT(n-1):=[1-ω(n-1)-ω(n-2)ω*(n)]
但し、θ(n)は、その成分が適応法則によって発生する制御装置パラメータであるベクトルであり、φ(n)は、回帰ベクトルで、但し全てのn≧0に対して|φ(n)|≧1である。もし、e(n):=ω(n)−ω*(n)が蓄積した流体重量に対するトラッキング誤差を表すならば、このトラッキング誤差は、次の式を満足する:
e(n)=a*1(θ(n-1)-θ*)Tφ(n-1)
但し、θ*は、未知の“最適”パラメータベクトルを表し、
【0055】
【数1】

【0056】
θ*のサンプル時間への依存性は明確でないが、θ*は、時間と共にゆっくりと変動し、それがオンラインパラメータ推定および適応制御技術を利用する主な動機の一つである。一般的に、線形時変システムに対する安定的な適応制御の誘導は複雑である。ポンプ動特性の緩時変性のために、θ*定数での標準適応制御法が本発明に十分であることが分った。
【0057】
限外濾過システムのポンプは、一般的に運転の下端および上端で飽和挙動を示す。特に、ある電圧レベル以下で、ポンプのローラが回転を止め、流体の流れが止る。同様に、一般的にポンプ製造業者が指定する、最大許容制御電圧がある。ポンプに対する制御信号の飽和のために、この標準適応制御は、不等式u1≦θT(n)φ(n)≦uh、但し、u1およびuhは、それぞれ、最小および最大許容制御電圧、が成立するように修正しなければならない。この時変パラメータ不確実性および入力飽和に対応するため、以下の平面射影による正規化した傾斜適応法則を適用する:
【0058】
【数2】
【0059】
但し、適応刻み幅γ0は、それが0<γ0<2[supna*1(n)]-1、を満足するように選択し、但し、a*1の上限は既知とする。インジケータ関数I(・,・)は、次のように定義する:
【0060】
【数3】
【0061】
射影項P(n)は、もし、μT(n)φ(n-1)<u1ならば、制御装置パラメータθ(n)が超平面θTφ(n-1)-u1=0上に射影されることを保証する。同様に、もし、μT(n)φ(n-1)>uhならば、制御装置パラメータθ(n)が超平面θTφ(n-1)-uh=0上に射影されるだろう。それでパラメーター推定θ(n)は、制御電圧がu1とuhの間の値に制限されるように適応させられる。
【0062】
もし、印加電圧ublo(n)をポンプ運転の線形領域に限定するならば、血液ポンプ16は、ARMA適応制御アルゴリズムによって適切にモデル化され、それを次のように表すことができる:
qblo(n)+b1blo(n-1)qblo(n-1)=a0blo(n-1)+a1blo(n-1)ublo(n-1)
それは、実際の流量qblo(n)およびn番目のサンプル時間での印加電圧ublo(n)に関係する。システムパラメータa0blo、a1blo、b1bloは、外乱がないとき、時の経つにつれゆっくりと変動すると仮定し、a1bloは正であると仮定する。
【0063】
最小印加電圧は、血液ポンプ16のローラが摩擦に打ち克って回転できる電圧の僅かに上の値に選択する。もし、印加電圧がこの最小電圧より下に決して落ちないならば、この限外濾過処置中、血流が決して静止せず、凝固の可能性が減少する。この最小電圧は、使用する配管の特性に依存するだろう。典型的最小電圧は、0.3ボルトである。最大電圧は、ポンプ製造業者によって与えられるだろう。典型的最大電圧は、3.2ボルトである。
【0064】
この制御法則は、直接適応制御方式に知られるように、ublo(n)=θTblo(n)φblo(n)によって表され、但し、θblo(n)は、三つの制御装置パラメータから成るベクトルであり、φblo(n)は次の式によって与えられる:
φTblo(n-1)=[1-qblo(n-1)q*blo(n)]
この所望の流量は、低域通過フィルタの出力で
【0065】
【数4】
【0066】
それは、所望の流量で必要な変化に対して滑らかな応答を与える。例えば、血液ポンプ16始動は、カテーテルが容器壁に引寄せられないように滑らかだろう。
【0067】
図4は、一般的に、限外濾過処置のようなプロセスを制御するために意思決定するための、例えば、コンピュータ制御装置12で実現した監視制御装置160によるような、マイクロプロセッサで実現できるファジィ論理過程を示す。ファジィ論理理論からよく知られているように、ファジィ論理制御システム190は、一般的にファジィ化装置192、推論エンジン194、およびプラント198を制御するための非ファジィ化装置196を含む。ファジィ化装置192は、一つ以上の個別入力データ信号200を受け、1組のメンバーシップ関数でメンバーシップの度合を割当てることによってファジィ集合を作る。推論エンジン194は、ファジィ・ルールベース202に基づいて入力信号200から一つ以上のファジィ推論を作る。非ファジィ化装置196は、1組の出力メンバーシップ関数に基づいてこのファジィ推論をデファジファイし、プラント198に個別出力制御信号204を与える。ファジィ・ルールベース202は、制御されるシステムの操作上のプロトコルに関するエキスパート知識を含み、且つプラント198を制御するための“IF−THEN”ルールの集合を含む。非ファジィ化装置196は、これらのファジィ推論をデファジファイするためにファジィ論理の技術で知られる種々の数学的手法を適用してもよい。プラント198は、このプラント198の性能に関するフィードバック情報を、推論エンジン194で使うために、このファジィ論理制御システム190に供給してもよい。
【0068】
ファジィ化および非ファジィ化は、測定した物理量(入力200および出力204)とファジィ推論エンジン194の間に必要なインタフェースを構成する。結果の数学的関係がファジィシステムである。このファジィシステムは、入力として厳密な値を受け、これらの値からファジィ集合を作り、指定したルールベース202から推論を作り、および推論したファジィ出力を非ファジィ化することによって厳密な出力を提供する。
【0069】
本発明では、プラント168が血液濾過システム10であり、ファジィ論理制御システム190を、ポンプ16、60a、60b、66を制御するためのコンピュータ制御装置12でソフトウェアによって実現し、および入力データ信号200が患者の心拍数120および患者の血圧130である。患者の心拍数120は、一般的には1分当り脈拍(bpm)で測定し、および患者の血圧130は、一般的には水銀柱ミリメートル(mmHg(=133.3Pa))で測定する。医者の専門臨床知識によって、心拍数120(Rh)および血圧130(Pb)に基づき限外濾過速度を修正するための代表的ファジイ・ルールベース202は、以下の監視ルールの集合を有する:
監視ルール(1):もしRhが高く且つPbが正常かまたは低ければ、限外濾過を
減少する。10分間待つ。
監視ルール(2):もしPbが低く且つRhが正常かまたは高ければ、限外濾過を
減少する。10分間待つ。
監視ルール(3):もしPbとRhの両方が低ければ、ユーザに限外濾過速度の減
少または増加の選択をさせる。5分間待つ。
監視ルール(4):もしPbとRhの両方が連続30分間高ければ、ユーザに限外
濾過速度の減少または増加の選択をさせる。
監視ルール(5):もしPbが高く且つRhが連続60分間低ければ、限外濾過を
増す。
監視ルール(6):限外濾過の最低可能値は、0ml/h。限外濾過速度の最高
可能値は、医者が指定する限外濾過速度のそれの上30%で
あり、それでもし望むなら、限外濾過処置中に変えることが
できる。
監視ルール(7):もし限外濾過の増加が、濾過率(所望の血液流量に対する所
望の排液流量の比に比例)が20%を超えるように起るなら
ば、濾過率が0.2に等しいように血液ポンプ流量を増す。
監視ルール1〜5は、ファジィ論理技術を使って実現し、一方監視ルール6および7は、標準スイッチング(厳密な)論理法に基づく監視アルゴリズムに組込んだ。監視ルール1〜5の待機指示は、各ルールに局部的である。例えば、もし、監視ルール1を満足するために限外濾過を減少するならば、監視ルール10は、10分経過するまでは再び運用できない。しかし、もし監視ルール2〜7の一つを後に始動するならば、限外濾過速度を修正してもよい。監視ルールの他の集合は、当業者には明白だろうし、これらの監視ルールを本発明の範囲および精神から逸脱することなくそのように変えてもよい。例えば、監視ルールの時間独立集合を以下に公式化する。
【0070】
心拍数および血圧の高および低閾値、それぞれ、(Rhigh、Rlow)および(Phigh、Plow)を患者のサイズおよび心臓血管の状態に基づいて監視制御装置160に指定する。監視制御装置160がこれらの閾値を使って以下の不等式に従って心拍数120および血圧130の大きさの特徴を決定する。もし、Rlow<Rh<Rhighならば、心拍数120を正常と見做す。もし、Rlow>Rhならば、心拍数120を低いと見做し、およびもし、Rh>Rhighならば、心拍数120は高い。類似の不等式を適用して血圧130の特徴を決定する。患者の心臓血管の状態の変化に対応するために、限外濾過処置中にこれらの閾値を変更してもよい。
【0071】
図5は、時間を入力パラメータとしては除去した、本発明の原理による監視制御装置160を図式的に示す。この監視制御装置160は、スイッチロジック250が心拍数120および血圧130が低いか、正常か、または高いかに基づいて作動させる四つの別々のファジィシステム210、220、230、240を含む。ファジィシステム210、220、230、240の一つだけが与えられた時間に作動してもよい。スイッチロジック250は、これらの監視ルールの要求に応じて限外濾過を監視調整する前後に、必要な時間待つ作業も行う。
【0072】
図6Aおよび6Bは、それぞれ、監視制御装置160へ提供する心拍数120および血圧130の入力データ信号用に決めた2組の入力メンバーシップ関数である。図6Cは、ファジィシステム210、220、230、240が作ったファジィ推論を非ファジィ化する際に使うための限外濾過速度の変化135を意味する出力データ信号用に決めた1組の出力メンバーシップ関数である。各メンバーシップ関数上の点は、信頼の程度を表し、0と1の間で変動し、何れかの単一入力データ信号120、130または出力制御信号135は、特定のファジィ領域に属する。重複のために、一つの入力データ信号120、130または出力制御信号135は、一つ以上のメンバーシップ関数に属するかも知れない。これらのメンバーシップ関数は、ファジィ論理の当業者には分るように、異なるグラデーションを有するように変化してもよい。
【0073】
各個々の入力メンバーシップ関数および出力メンバーシップ関数は、中心および全幅を有する別の曲線として定義する。この説明の例では、個々のメンバーシップ関数を、三角形(T)関数、右台形(RT)関数、左台形(LT)関数、または定数値(C)関数のような特有の形状を有する曲線から選択してある。代替特性形状は、本発明の精神および範囲から逸脱することなく所望の応答に依って選択することができる。
【0074】
図6A〜Cを参照して、表1は、以下の論議域のために入力および出力メンバーシップ関数を要約する:
【数5】
但し、q*ult(n)は、監視制御装置160を作動させたときの所望の限外濾過速度である。
【0075】
【表1】
【0076】
このファジィシステムへの入力は、患者の心拍数と血圧である。各ファジィシステム210、220、230、240の出力は、単一ファジィ化装置、各呼出したルールからのファジィ論理、および中心−平均非ファジィ化装置を組合わせることによって導出する。ファジィシステムの出力Δ(n)は、限外濾過速度への推奨変更135である。この変更は、補充液流を一定に保ち、排出液流量にΔ(n)を加えることによって実行する。即ち、一旦サンプル時間で限外濾過の変更Δ(n)を計算すると、それを次のように適用し:
q*rep1(n+1)=q*rep1(n)
q*rep2(n+1)=q*rep2(n)
q*dra(n+1)=q*dra(n)+Δ(n)
q*ult(n+1)=q*dra(n+1)-q*rep1(n+1)-q*rep2(n+1)
サンプル時間nとサンプル時間n+1の間にΔ(n)だけ変化した限外濾過速度を生ずる。これらの出力メンバーシップ関数は、それらがq*ult(n)に依存し、それでこれらに頼るファジィシステム写像も変るかも知れないので、サンプル毎に変えてもよい。この構成は、この限外濾過システムをどんなサイズの患者に使ってもよいように設定してある。例えば、新生児は、成人より流量に遙かに小さい変更しか要さず、あるメンバーシップ関数の幅によって反映される事実は、所望の限外濾過速度に依存する。
【0077】
ファジィシステム210(FSI)は、監視ルール1および2に決めるように、心拍数120が高いおよび/または血圧130が低い場合に適用し、限外濾過速度に加える負数を出力する。ファジィシステム210は、三つのファジィサブシステム210a、210b、210c(FSIA、FSIB、FSIC)を含む。もし、心拍数120が高く且つ血圧130が高いか低いならば、または心拍数120が高いか低く且つ血圧130が低いならば、スイッチロジック250がファジィシステム210を作動させる。スイッチロジック250は、ファジィシステム210の選択を10分間使用禁止にもして、どのファジィサブシステム210a、210b、210cが排出液流量の減少量を計算するかを選択する。
【0078】
スイッチロジック250は、もし、Rhが高く且つPbが正常ならば、ファジィサブシステム210aを作動させる。ファジィサブシステム210a用のファジィ・ルールベースは:
FSIAルール(1):もしRhがμu31ならば、Δはμy13である。
FSIAルール(2):もしRhがμu32ならば、Δはμy12である。
FSIAルール(3):もしRhがμu33ならば、Δはμy11である。
スイッチロジック250は、もし、Rhが正常で且つPbが高ければ、ファジィサブシステム210bを作動させる。ファジィサブシステム210b用のファジィ・ルールベースは:
FSIBルール(1):もしPbがμv11ならば、Δはμy11である。
FSIBルール(2):もしPbがμv22ならば、Δはμy12である。
FSIBルール(3):もしPbがμv33ならば、Δはμy13である。
スイッチロジック250は、もし、Rhが高く且つPbが低ければ、ファジィサブシステム210cを作動させる。ファジィサブシステム210c用のファジィ・ルールベースは:
FSICルール(1,1):もしPbがμv11でRhがμu31ならば、Δはμy11である。
FSICルール(1,2):もしPbがμv11でRhがμu32ならば、Δはμy11である。
FSICルール(1,3):もしPbがμv11でRhがμu33ならば、Δはμy11である。
FSICルール(2,1):もしPbがμv12でRhがμu31ならば、Δはμy12である。
FSICルール(2,2):もしPbがμv12でRhがμu32ならば、Δはμy12である。
FSICルール(2,3):もしPbがμv12でRhがμu33ならば、Δはμy11である。
FSICルール(3,1):もしPbがμv13でRhがμu31ならば、Δはμy13である。
FSICルール(3,2):もしPbがμv13でRhがμu32ならば、Δはμy12である。
FSICルール(3,3):もしPbがμv13でRhがμu33ならば、Δはμy11である。
【0079】
スイッチロジック250は、監視ルール3に決めるように、もし、心拍数120および血圧130が低くければ、ファジィシステム220(FSII)を作動させて、限外濾過速度の変化135を計算し、ファジィシステム220を10分間使用禁止にする。ファジィシステム220は、二つのファジィサブシステム220a、220b(FSIIA、FAIIB)を含む。限外濾過速度の変化135の方向が未定であるので、スイッチロジック250は、ユーザに限外濾過速度を増すべきか、減らすべきかを問い合せねばならない。ユーザは、この限外濾過速度を増すためにはファジィサブシステム220aを選択する。ファジィサブシステム220a用のファジィ・ルールベースは:
ルール(1):もしRhがμu11ならば、Δはμy23である。
ルール(2):もしRhがμu12ならば、Δはμy22である。
ルール(3):もしRhがμu13ならば、Δはμy21である。
その代りに、ユーザは、この限外濾過速度を減らすためにはファジィサブシステム220bを選択する。ファジィサブシステム220b用のファジィ・ルールベースは:
ルール(1):もしPbがμv11ならば、Δはμy11である。
ルール(2):もしPbがμv12ならば、Δはμy12である。
ルール(3):もしPbがμv13ならば、Δはμy13である。
【0080】
スイッチロジック250は、監視ルール4に決めるように、もし、心拍数120および血圧130が共に連続30分間高ければ、ファジィシステム230(FSIII)を作動させて、限外濾過速度の変化135を計算する。ファジィシステム230は、二つのファジィサブシステム230a、230b(FSIIIA、FAIIIB)を含む。限外濾過速度の変化135の方向が未定であるので、ユーザは、限外濾過速度を減らすべきか、増すべきかを訊かれる。ユーザは、この限外濾過速度を減らすためにはファジィサブシステム230aを手動で選択する。ファジィサブシステム230a用のファジィ・ルールベースは:
ルール(1):もしPbがμv31ならば、Δはμy21である。
ルール(2):もしPbがμv32ならば、Δはμy22である。
ルール(3):もしPbがμv33ならば、Δはμy23である。
ユーザは、この限外濾過速度を増すためにはファジィサブシステム230bを選択する。ファジィサブシステム230b用のファジィ・ルールベースは:
ルール(1):もしRhがμu31ならば、Δはμy13である。
ルール(2):もしRhがμu32ならば、Δはμy12である。
ルール(3):もしRhがμu33ならば、Δはμy11である。
【0081】
最後に、ファジィシステム230(FSIV)が患者の健康状態の改善の結果として限外濾過速度の増加量を計算する。スイッチロジック250は、もし、Rhが低く且つPbが高ければ、ファジィサブシステム240を作動させる。ファジィサブシステム240用のファジィ・ルールベースは:
ルール(1):もしPbがμv31ならば、Δはμy21である。
ルール(2):もしPbがμv32ならば、Δはμy22である。
ルール(3):もしPbがμv33ならば、Δはμy23である。
監視制御装置160は、監視ルール7によって規定するように、濾過率が常に20%以下であるように濾過率も調整する。
【0082】
もう一つの側面で、監視制御システム160は、測定した流量をこのポンプ型式に基づく予測誤差と比較することによってその認定もする。監視制御装置180は、流体通路の有意な漏れまたは配管の外れは正確に検出しながら、例えば、電子秤54、78への不用意な衝突の結果である、不正確な流体重量測定値は無視しなければならない。前者の場合、この監視制御装置160は、限外濾過処置を休止し、可聴または可視警報を出す。
【0083】
排液ポンプ66および注入液ポンプ60の予測誤差は、測定した累積流体重量とこのポンプ型式が予報する予測重量の差と定義する。追跡誤差は、予測流体重量と所望の流体重量の差と定義する。血液ポンプ16に対して、流体流量は、流量プローブ27によって測定し、予測誤差および追跡誤差は、流体流量に関して参照する。
【0084】
もし、与えられた最少数の連続サンプル周期に対して、予測誤差がポンプ型式の提供する正の定数より大きく且つ追跡誤差がやはりポンプ型式の提供する第2の正の定数より大きいならば、監視制御装置160は、監視活動を開始する。もし、予測誤差だけ、または追跡誤差だけが大きければ、この監視制御装置160によるパラメータ推定値は、まだ血液濾過システム10に合わせない。もし両方の誤差が大きく且つ同符号であれば、血液濾過システム10のポンプ16、60a、60b、66を停止する。もし予測誤差および追跡誤差が大きく且つ反対符号であれば、この監視制御装置160によるパラメータ推定値を平静な血液濾過システム10に僅かに合わせ、それで不正確な測定値か、血液濾過システム10の動的特性に突然の極端な変化が起りそうである。ポンプ動的特性の極端な変化は、配管漏れのような重大なシステム故障によってのみ起る。もし、ポンプ16、60a、60b、66の何れかに、所定数以上の連続サンプルに矛盾した重量または流量を検知したならば、監視制御装置160は、この血液濾過システム10を使用禁止にして可聴または可視警報を出す。
【0085】
上記の適応制御または監視制御のどちらか、または両方の実施は、血液濾過システムの自律性を増すことができる。自律性向上の結果として種々の利点が生ずる。例えば、連続モニタおよび制御が医療コストを下げ、医療スタッフによる限外濾過処置の断続的管理の必要性を減らすことによって医療の品質を改善する。この発明の更なる詳細は、以下の例で説明する。
【0086】
以下の例は、上に説明したような、適応制御および監視制御を有する限外濾過システムで行うシミュレートした限外濾過処置で、水道水か期限切れの血液を仮想患者とした。利用したポンプモデルは、実際の流体重量または流量に基づき、ポンプローラ角速度からではないので、制御性能は、流体のレオロジーと独立である。達成可能な流量の範囲は変るかも知れないが、これらのシミュレーションに使用する流体の種類は、流れ追跡の観点から無関係である。
【0087】
サンプリング周期n=1.75秒をこれらの例では使った。この特定のサンプル周期は、幾つかの初期実験後に、瞬間ポンプ流量は衝動的で平均流量にしか関心がないことを考慮して選択した。サンプル周期が小さ過ぎると、サンプル毎に流量に大きな変動を与え、急速に変動し過ぎる制御信号を生じる結果となり、非円滑運転を起すかも知れない。他方、数秒を超えるサンプリング時間は、応答が遅く、追跡誤差が大きい結果となるかも知れない。
【0088】
各例でシミュレーションの初めに、もし、その例で血液を使うなら、管路の中の気泡を除去するために、全ての配管部分に水または150mEq/Lの塩化ナトリウム溶液を注入した。排出液重量の測定ノイズ源は、排出液の蒸発で、それは、排液容器を封止することによって防げる。他の測定ノイズ源には、通風による補充液バッグのスイッチングがあり、それは重量測定に不確かさを取込む。バッグおよび秤を格納装置の内部に置くことは、この不確かさを最小にし、重量測定に於ける不確かさの唯一の発生源としてのこの秤の精度(±0.5g)の実際的使用を可能にする。流量測定は、使用する流体に対して製造業者が較正した、超音波流量プローブ(トランソニック・システムズ社)によって行う。この流量プローブの精度は、測定値の±7%であり、それは血液流量誤差源であるが限外濾過誤差源ではない。
【0089】
血液、排液、および補充ポンプのシミュレーション流量は、患者としての新生児に一般的に使うものと矛盾しないように選択してある。限外濾過は、もし小流量および小体外血液管路容積を使うなら、小さい患者に有益である。この血液管路用の配管およびコネクタの種類および大きさは、必要な流量の大きさに従って選択してある。これらの部品が各ポンプに対するARMA式パラメータを決め、それらは一般的に、これらの部品の物理特性が時間が経つと変動するので、いつかは変動するだろう。この例のシミュレーション目的での適応刻み幅γ0、最大電圧uh、および最小電圧u1の値を表2に示す。
【0090】
【表2】
【0091】
(例1)
“患者”として容器一杯の血液でシミュレートした限外濾過処置に対する追跡誤差、制御電圧および制御装置パラメータを、それぞれ、図7A、7B、および7Cに示す。追跡誤差は、電圧が定常である間に、30秒以内にゼロになる。限外濾過処置の初めの大きな負の血液ポンプ追跡誤差は、数秒間の遅い血液クリアランスは患者に悪影響しないので、許容する。大きな正の追跡誤差は、組織灌流が減少する結果となることがあり、患者は、この種々の組織に達する栄養の減少に逆に応答するかも知れず、しないかも知れない。従って、限外濾過処置の初めの過渡的に大きな負の誤差は、追跡オーバシュートの防止のため交換を許容する。
【0092】
(例2)
血液流量を40.0ml/minに設定し、排液流量を230.0ml/hに設定し、および両補充流量を100.0ml/hに設定して約1時間継続する限外濾過処置が新生児に行う限外濾過処置をシミュレートする。全ての流体の交換用に水を利用するシミュレーションの典型的流量および重量追跡誤差を図8A、8B、8Cおよび8Dに示す。このシミュレーションの初めの血液ポンプ追跡誤差は、図7A〜7Cに示すシミュレーションの初めと性質が違う。何故なら、製造業者が提供する流量計低域通過フィルタの選択が二つのシミュレーションでこの時限に対して同じでないからである。正確な継続時間が与えられたとすると、期待する限外濾過は、30.1mlであった。“患者”の初期体重(269.3±0.5g)と最終体重(241.0±0.5g)を比較することによって測定した限外濾過は、28.3±0.7gであり、それは所望の限外濾過と1.7±0.7mlの差となった。排液および補充液の初期および最終重量を比較することによって測定した期待限外濾過は、28.4±1.2mlであった。この期待限外濾過速度を排液および補充容器の初期重量、それぞれ、0.0±0.5g、345.2±0.5g、および341.3±0.5gと対応する最終重量、それぞれ、230.5±0.5g、243.4±0.5gおよび241.0±0.5gから[(230.5±0.5)−(0.0±0.5)]−[(345.2±0.5)−(243.4±0.5)]−[(341.3±0.5)−(241.0±0.5)]=28.4±1.2gと計算した。
【0093】
(例3)
図9A、9B、および9Cは、秤を2度衝突し、配管漏れが起るシミュレーションを示す。不適合な重量変化を決定するための閾値を表3で与える。
【0094】
【表3】
【0095】
大きさの大きい短い外乱をn=10で導入し(大きい重量を秤に載せ、それを除去することによる)、この監視制御装置が応答しない。n=60で、同様な、小さな外乱を短時間導入し、再び監視制御装置が応答しない。n=90で、同様に小さい外乱を長時間導入する。これは、配管の漏れをシミュレートし、実際の限外濾過処置中に漏れが起ったときに一般的に直面するものより遙かに小さい外乱である。制御装置は、この不適合な重量変化を検出し、この場合、限外濾過を中止することを決定する。
【0096】
(例4)
図10A、10B、および10Cは、新生児に行った限外濾過のシミュレーションのためのシミュレートした患者データおよび所望の排液流量を示す。この患者心拍数および血圧は、コンピュータソフトウェアで作った。血液流量は、40ml/minに設定し、補充液流量は、共に100ml/minに設定してある。心拍数の閾値は、90bpmおよび105bpmに選択し、血圧の閾値は、9.3kPaおよび12.7kPaに選択してある。このシミュレーションの初めに、RhおよびPbは、それらの正常範囲内にある。n=40付近で、Rhが閾値の上に上昇し、一方Pbは正常のままである。監視制御装置は、高心拍数のために補正を行い、応答を待つ。実際の限外濾過処置中、監視制御装置は、高心拍数のために何か他の措置を執る前に約10分間待つだろう。このシミュレーションのために、この待機を約30秒に縮める。このスイッチロジックは、患者の心拍数が高いままであるので、第1補正後に再びFSIAを30秒作動させる。この監視制御装置は、更に30秒待って、スイッチロジックがRhおよびPbを再チェックする。この時、心拍数は高く、血圧は低く、それでスイッチロジックがFSICを作動させる。このファジィサブシステムFISCは、約n=100で限外濾過速度を低減し、それでその後まもなくRhおよびPbが正常に戻り始める。監視制御装置がFSIの再起動が必要かどうかをチェックする前に、患者パラメータが正常に戻るので、それ以上の補正は行わない。
【0097】
(例5)
図11A、11Bおよび11Cは、心拍数および血圧が共に低く、ユーザが監視制御装置に訊かれたとき限外濾過の減少を指定した場合のシミュレーションを示す。血液流量は、40ml/minに設定し、補充液流量は共に100ml/minに設定してある。心拍数の最小および最大閾値は、90bpmおよび105bpmに選択し、血圧の最小および最大閾値は、9.3kPaおよび12.7kPaに選択してある。このシミュレーションの初めに、RhおよびPbは、それらの正常範囲内にある。n=80付近で、RhおよびPbがそれらそれぞれの下閾値の下に低下し、それでFSIIBが限外濾過速度の減少量を計算する。スイッチロジックFSIIBは、他の調節を行う前にFSIIを10秒(実際の限外濾過処置には5分)待たせる。患者パラメータがそれらそれぞれの正常範囲には決して戻らないので、監視制御装置は、限外濾過速度がゼロまで排液流量を減少させる。
【0098】
(例6)
図12A、12Bおよび12Cは、患者パラメータが共に高く、ユーザが限外濾過速度の増加を指定する場合のシミュレーションを示す。血液流量は、40ml/minに設定し、補充液流量は共に100ml/minに設定してある。心拍数の閾値は、90bpmおよび105bpmに選択し、血圧の閾値は、9.3kPaおよび12.7kPaに選択してある。このシミュレーションの初めに、RhおよびPbは、それらの正常範囲内にある。n=60付近で、患者心拍数および血圧の両方がそれらそれぞれの上閾値の上に上昇する。20秒(実際の限外濾過処置では30分)後、FSIIを作動させるための条件を満たし、それで限外濾過速度を増す。患者パラメータがそれらそれぞれの正常範囲には決して戻らないので、監視制御装置は、限外濾過速度が最初に与えた流量の上30%まで排液流量を上げる。この点で、この血液濾過装置は、ユーザに最大限外濾過速度が所望の濾過速度として設定してあるので警告を発する。
【0099】
(例7)
図13A、13Bおよび13Cは、患者が限外濾過速度を増すに十分良くなっている場合のシミュレーションを示す。血液流量は、40ml/minに設定し、補充液流量は共に100ml/minに設定してある。心拍数の閾値は、90bpmおよび105bpmに選択し、血圧の閾値は、9.3kPaおよび12.7kPaに選択してある。このシミュレーションの初めに、RhおよびPbは、それらの正常範囲内にある。一旦心拍数および血圧が好ましい領域内になると、監視制御装置は、120秒(実際の限外濾過処置では約60分)待って排液ポンプ流量を増す前に過渡的挙動を検出する。心拍数および血圧がそれらの正常範囲へ戻るので、それ以上の調節は行わない。
【0100】
(例8)
図14A、14Bおよび14Cは、監視制御装置が高濾過率のために限外濾過を調節する場合のシミュレーションを描く。患者パラメータは、共に長時間に亘って高く、排液流量を332.6ml/hから372.4ml/hへ増すことによって、初期限外濾過速度が、132.6ml/hから172.4ml/hへ増す。後者の流量は、もし血液ポンプ流量を40.0ml/hに維持するならば、22.2%の濾過率を達成するだろう。濾過率を20%まで下げるために、血液ポンプ流量を44.3ml/hに増さねばならない。
【0101】
上に説明した監視制御システムおよび適応制御システムは、限外濾過処置に使うために限定されず、心肺機械のように、流体を移動するためにポンプを使用する他の医療システムにも適用しうるものである。他の適当な医療用途は、当業者に明白だろう。
【0102】
当業者には、本発明のシステムおよび方法に前記の請求項によって定義する範囲から逸脱することなく種々の修正を施せることが分るだろう。
【技術分野】
【0001】
本発明は、血液濾過のシステムおよび方法を対象とし、更に詳しくは、一つ以上のモニタした患者パラメータおよび流体流量に基づく患者の血液からの流体および/または可溶性老廃物の連続濾過を制御するための監視制御システムおよび方法並びに適応制御システムおよび方法を対象とする。
【背景技術】
【0002】
病気、けがまたは手術を含む種々の理由で、患者は、自分の血液から溶解した老廃物を含む過剰な流体を取除くために生来の腎機能の補充または補完が必要なことがある。この目的のために知られる幾つかの処置は、透析、血液透析、血液濾過、血液濾過透析および限外濾過があり;もう一つの関連処置は血漿交換である。使用する特定の処置は、その特定の患者の必要性に依る。例えば、透析は、血液から可溶性老廃物および溶媒を除去するために使用し;血液濾過は、血液から血漿水を除去するために使用し;血液濾過透析は、血液から不要な溶質(可溶性老廃物)と血漿水の両方を除去するために使用し;限外濾過は、血液濾過の1種であり;および血漿交換は、血漿交換フィルタによって血漿を除去するために使用する。腎機能補充は、栄養、赤血球生成、カルシウム・燐のバランスおよび患者からの溶媒と溶質の除去に影響するかも知れないので、利用する処置を正確に制御することが必須である。血管内流体体積の除去割合の正確な制御も患者の適正な流体バランスを維持し且つ低血圧を防ぐために重要である。
【0003】
腎臓補充処置をモニタし且つ制御するために種々のシステムが提案されている。例えば、米国特許第4,132,644号は、閉じた液体容器内の透析液の重量を秤で示す透析システムを開示する。透析液が透析器を通過してから、消費した液を同じ容器へ戻し、重量を再び示す。容器が元の透析液と限外濾過液を受けるので、患者から除去した限外濾過液の量は、この容器の全重量の増加に等しい。このシステムは、重量測定装置が決定要因とは成らず、それでこの処置に使用する液体の量を精密制御をするものでない。
【0004】
米国特許第4,204,957号は、患者への代用液の供給を制御するために重量測定を利用する人工腎臓システムを開示する。このシステムでは、患者の血液をフィルタを通して圧送し、この血液からの濾過液を計量装置に関連する測定容器へ排出する。交換液の入った第2測定容器を第2計量装置に関連付け、精製血液管路に接続する。ポンプによって、この交換液および精製血液を患者へ送返す。この第1および第2計量装置を、この第1測定容器で受けた濾過液の重量に依って第2測定容器から一定割合の代用液を精製血液へ供給するような方法で、測定システムによって互いに結合する。このシステムは、血液濾過で循環する透析液は利用しない。
【0005】
米国特許第4,767,399号は、連続動静脈血液濾過(CAVH)を行うためのシステムを開示し、この開示したシステムは、所望量の流体を患者の血液から引出し且つ選択した量の流体体積を患者へ戻すために容積ポンプの利用に頼る。
【0006】
米国特許第4,923,598号は、透析器および/またはフィルタ装置を含む体外血液回路を含む、血液透析および血液濾過のための装置を開示する。このシステムは、この血液回路内の透析器またはフィルタ装置の上流および下流に位置する評価ユニットと共に流れセンサを利用することによって単位時間当りの流体引出しおよび引出した流体の総量を決定する。
【0007】
米国特許第4,728,433号は、差動計量によって限外濾過を調製するためのシステムを開示する。このシステムは、入口室および出口室を有する差動計量容器を含み、それが重量で一定量の新鮮な透析液にこの血液透析器を貫流させる。このシステムは、計量サイクルのシーケンスで動作し、その間に血液から除去した限外濾過液の量を計算できる。その上、各計量サイクルに対する限外濾過速度を計算してもよい。このシステムは、この差動計量容器の入口室および出口室の交互する注排サイクルで患者に透析液を給送しながら、血液から除去した限外濾過液の量を決定および調整するための機構を提供する。
【0008】
ある患者に対しては、腎臓補充処置が数時間または数日にさえ及ぶかも知れない。一般的に、腎臓補充処置をモニタおよび制御するための現在のシステムは、そのような処置を新生児に行うために必要な柔軟性および精度に欠ける。これは、主として使用するポンプの満足な自動制御の欠如による。そのような装置を使用する際に伴う患者の危険のために、保健要員は、患者から取出した流体を時間毎を基準に測定する。取出した流体をモニタすることが継続的に必要であることは、看護ケアのかなりの増加に繋がり、それで治療のコストを増す。従って、これらのシステムの自律性のレベルを、この処置が医療要員に手間が掛らず、従ってコストが掛らないように改善する必要がある。しかし、この自律性向上は、患者の安全性を犠牲にして行うべきでない。
【0009】
ある従来の腎機能補充/補完システムは、単純に故障状態の存在を検出し、警報を出し、およびシステムポンプを消勢してこの処置を止めるという初歩的レベルの監視制御をする。もし、ポンプが消勢中に血液フィルタが凝固したら、配管および血液フィルタを取替えねばならず、同時に患者が感染する機会が増大する。更に、この血液濾過処置は、患者の健康への事によると負の影響で遅滞する。
【0010】
この腎機能補充/補完システムの時変性のために、流体汲出しの動的特性が時間が経つにつれて変化するかも知れない。例えば、配管、フィルタ、およびコネクタのようなシステム部品の特性が、老化または流体流れ経路の閉塞のために、時間が経つにつれゆっくりと変動するかも知れない。流路が収縮すると、増加した流れ抵抗を補償するように、ポンプのポンプ流量を変えなければならない。更に、配管セットの交換は、ポンプ流量の迅速な変更調整を要し、それは、短期間の過渡的変動のために、比較的一定値として最初に確立するのが困難かも知れない。腎臓補充措置をモニタおよび制御するための現在のシステムは、これらの時間依存流量変動を高精度、高速応答、および最小のオーバシュートまたは過渡変動で追従する補正で自律的に補正する能力に欠ける。
【先行技術文献】
【特許文献】
【0011】
【特許文献1】米国特許第5,344,568号
【特許文献2】米国特許第5,211,849号
【特許文献3】米国特許第4,132,644号
【特許文献4】米国特許第4,204,957号
【特許文献5】米国特許第4,767,399号
【特許文献6】米国特許第4,923,598号
【特許文献7】米国特許第4,728,433号
【発明の概要】
【発明が解決しようとする課題】
【0012】
正確、確実で連続長期間運転が可能で、且つ成人、小児および新生児患者に効果的に使える、多目的腎機能補充/補完システムに対する要求がある。更に、この多目的腎機能補充/補完システムを制御し、患者管理を改善しおよび大きな自律性を与えるために、流体の移動を正確に調整し且つこのシステムの全体の挙動をモニタするためのフィードバック制御システムに対する要求がある。
【課題を解決するための手段】
【0013】
本発明は、患者の血液から流体および/または可溶性老廃物を除去するための多目的システムおよび方法:限外濾過だけ、血液濾過透析、血液濾過透析と限外濾過、血液透析、および補液ありまたは無しの血漿交換を対象とする。本発明のシステムおよび方法は、高精度(このシステムを通過する流体の総量に関係なく±2gのオーダの)で確実な、長期間運転(5〜10日)を行うことができる。この発明のシステムおよび方法は、成人、小児および新生児患者に同等に適用できながら、その多目的性、プロセスの反復性および精度、並びに体外血液回路の中の流体の同時、連続流れのために有利である。
本発明による、患者の血液から流体を除去するための血液ろ過システムは、注入液、排出液及び血液ろ過システム内の血液からなるグループから選択された液体を吸い上げる第1のポンプ、前記第1のポンプが発生した前記血液ろ過システム内の流体の流量を測定すると共に上記流体の流量に相関する流量データ信号を提供する第1のセンサ、前記血液ろ過システム内の前記第1のポンプに電気的に接続されて該第1のポンプへ出力信号を伝達することにより前記流体の流量を調整すると共に前記第1の流量センサに電気的に接続されて該第1のセンサから提供される流体の流量データ信号を受け取る監視制御装置、少なくとも一つの患者パラメータを測定するためのモニタであって、上記少なくとも一つの患者パラメータに相関する患者パラメータデータ信号を提供する患者パラメータモニタ、を含み、前記監視制御装置は前記患者パラメータモニタと電気的に接続して該患者パラメータモニタが提供する前記患者パラメータデータ信号を受け取り、前記監視制御装置は流量データ信号及び患者パラメータデータ信号を受け取って、少なくとも一つの監視ルールを用いたファジィ論理と、該ファジィ論理のメンバーシップ関数であって所望の限外濾過速度に依存する幅を有する少なくとも一つのメンバーシップ関数を用いて流量データ信号と患者パラメータデータ信号を解析し、前記第1のポンプを調節するため出力信号を前記第1のポンプへ与えて、必要に応じて周期的に前記第1のポンプから発生された液体の流量を調節して、患者の血液から除去する流体を調整する。
【0014】
ここで使うように、“血液濾過”という用語は、血液透析、血液濾過、血液濾過透析、限外濾過および血漿交換プロセスを含めるように広く解釈すべきである。ここで使うように、“注入液”という用語は、血液濾過処置の一部として患者に供給してもよい、透析液またはその他の交換液を含むと定義する。
【0015】
好適実施例で、本発明のシステムは、血液フィルタ、この血液フィルタを通して患者から血液を汲出し且つ患者へ戻すための血液ポンプ、および汲出した血液を患者に出し入れするための適当な配管を含む。このシステムは、更に、注入液の供給を維持するための第1溜、この注入液の重量を絶えずモニタして、モニタした重量と相関する重量データ信号を発生するための第1計量手段、およびこの第1溜から血液フィルタまたは適当な血液配管アクセス口へ注入液を汲出すための第1ポンプを含む。第2溜が血液フィルタからの排出液(例えば、血液から除去した流体および溶質を含む、消費した注入液または限外濾過液)を受け、第2計量手段が排出液の重量をモニタ、モニタした重量と相関する重量データ信号を発生する。第2ポンプがこの血液フィルタからの排出液を第2溜へ送込む。このシステムは、この血液ポンプ、注入液ポンプ、排液ポンプ並びに第1および第2計量手段に機能するように接続した、コンピュータ化した制御装置も含む。
【0016】
この制御装置は、この処置中、周期的にであるが継続を基準に、所定の間隔でこの第1および第2計量手段が絶えず発生する重量データ信号を問い合せ、それからこの第1および第2溜の中の注入液および排出液の重量をこの所定の間隔で決定するように設計してある。血液から引出す流体の流量も決定する。この制御装置は、注入液および排出液重量を制御装置のメモリの中の対応する所定の計算した重量と比較し、必要なとき、患者の血液から予め選択した量の流体の除去を達成するために、制御装置は、制御信号を発生し、それが注入液および排出液ポンプのポンプ流量を自動的に調節する。その上、この制御装置は、血液ポンプが運転しているときだけ注入液および排出液ポンプを運転するようにプログラムしてある。更に、血液ポンプは、血液から所望のレベルの流体除去を達成するために必要に応じて血液フィルタを通る血液の流量を変えるために、重量データ信号に応じてまたはそれと独立に制御装置が発生する制御信号に機能するように接続してあり且つそれに応答する。
【0017】
代替実施例では、このコンピュータ制御装置が、操作員の初期選択によって、患者に機能するように接続した一つ以上の種々のモニタシステムと連結してある。この技術で周知の、これらのモニタシステムは、モニタした患者パラメータに対応するデータ信号を発生し且つ出力し、このコンピュータ制御装置がそのようなデータ信号を受ける。血液濾過作業中、連結したパラメータを絶えずモニタするが;しかし、この制御装置は、操作員が選択した患者パラメータに対応する特定のパラメータデータにしか応答しない。モニタでき且つこのコンピュータ制御装置と連結してある患者パラメータには次のものがある:動脈圧、中央静脈圧、肺動脈圧、平均動脈圧、毛管楔入圧、全身血管抵抗、心拍出量、O2およびCO2、含有量および飽和量(静脈または動脈)、血圧、心拍数、患者体重、外部注射速度、およびヘマトクリット。多数のこれらのパラメータをモニタしてもよく、既知の方法で発生した対応する出力データ信号は、留置静脈内または動脈内カテーテルを利用する。残りのパラメータをモニタし、この技術で周知の手段によってデータ信号を発生する。操作員は、上記パラメータの一つ以上を選択して制御装置と連結し、次にその装置が処置中に周期的であるが、継続を基準に、連結したモニタシステムが絶えず発生するパラメータデータ信号を所定の間隔で問い合せる。次にこの制御装置は、このパラメータデータをそれに応答して評価し、必要なとき、制御装置が制御信号を発生し、それが患者の利益と安全のために患者の血液から予め選択した量の流体を除去するように、注入液、排出液および血液ポンプのポンプ流量を自動的に調節する。
【0018】
本発明のシステムは、上に第1実施例に関連して説明したように、注入液および排出液重量データ信号のモニタと応答の組合せを、この制御装置に連結した他の患者パラメータの一つ以上に加えて利用してもよいことが分るだろう。
【0019】
特別な例として、患者の体重のモニタと関連して、このコンピュータ制御装置は、患者の体重の連続値を提供するベッド秤に連結してもよい。全部の患者体重データ信号に応答して、このコンピュータ制御装置は、患者の体重を時が経つにつれて減少または増加するための予め設計した計画を実現するために注入液および/または排出液ポンプを制御するかも知れない。患者体重の増加または減少は、適切なポンプ制御によって時間に関して線形または非線形方式で達成できる。同様に、このコンピュータを患者のO2飽和度の連続読取り装置に連結してもよく、そうすればこの制御装置がこのO2飽和度を受け、評価し且つ注入液、排出液および血液のポンプ流量を制御することによって応答し、それによって患者の酸素付加を最適化するだろう。
【0020】
全ての上述のモニタパラメータに関連して、このコンピュータ制御装置は、患者に機能するように接続した適当な信号発生装置または発生源から各特別に選択したパラメータに対応し且つ関係するデータ信号を受けるだろう。そこでこの制御装置は、周期的問合せの後に、これらの問合せ値を所定の所望値と比較し、自動的に注入液、排出液および血液のポンプ流量にモニタした信号に応じた、適当な所定の変更を行うだろう。更に、上に参照したパラメータの二つ以上を連続的に同時にモニタすることができ、およびこのコンピュータは、一つ以上の特定のパラメータを他のものより考慮する階層構造でプログラムしてもよく、これらの選択したパラメータに基づいて注入液、排出液および血液のポンプ流量の適当且つ所望の調節で応答する。
【0021】
このコンピュータ制御装置は、選択したモニタパラメータの観察した変化に線形応答または非線形(曲線状)応答を与えるように、注入液、排出液および血液ポンプのポンプ流量(ポンプ速度)を調節するように設計およびプログラムしてある。これに関して、“線形”は、一定の、非指数型の変化を意味し、および“非線形”または“曲線状”は、線形以外のあらゆるものを意味する。線形対非線形応答特性の選択は、このシステムの操作員が患者の要求に基づいて行う。例えば、ある場合には、最初は流体除去速度が速く、時間が経つと減少するのが望ましいかも知れない。その場合、曲線状または指数型応答を利用するだろう。他の状況では、時間が経っても安定したまたは一定の流体除去が望ましく、それで線形応答特性を選択する。更に、操作員の選定で、このコンピュータ制御装置は、所望の応答特性を達成するためにポンプ流量を調製するように、線形および曲線状応答信号を組合わせてもよいことを意図する。例えば、最初に流体を急速に除去する非線形初期応答期に続いて、一定の流量で流体を継続除去する線形応答期が設定される。
【0022】
更にもう一つの代替実施例では、コンピュータ制御装置が、他の点ではこの血液濾過システムと独立の、一つ以上の患者注入液ポンプからデータ信号を受ける。これらの注入液ポンプは、患者への静脈内液、医薬品、非経口栄養剤および/または血液製剤の注入のために使う。これらの独立の注入液ポンプからのデータ出力をモニタすることによって、単位時間当りの外来総流体体積を確認できる。すると、制御装置は、必要に応じて、経静脈輸液療法の変化に応じて自動的に限外濾過速度および/または注入液流量を変えるように、要求に応じて、このシステムの注入液、排出液および血液ポンプのポンプ流量を変えるだろう。これは、血液濾過を行いながら、独立の患者管理を容易にするだろう。独立の注入液ポンプを備える制御装置の適切な調整が、血液濾過による所望のまたは対象とする流体除去目標を進行中の経静脈輸液療法に従って自動的に達成できるようにする。
【0023】
付加的代替実施例では、このコンピュータ制御装置が、それぞれの流体のポンプ流量を制御するためにこのシステムの注入液、排出液および血液のポンプの一つ以上に機能するように接続した監視制御システムを組込む。この監視制御装置は、流量計が与える血液ポンプのポンプ流量並びに電子秤が与える重量データ信号の変化率からの注入液および排出液ポンプのポンプ流量に関する、これらの流体の流量と相関する、フィードバック信号を受け且つ利用する。この監視制御装置は、血圧モニタからの血圧データ信号または心拍数モニタからの心拍数データ信号のような、患者パラメータモニタから得た患者パラメータも受け且つ利用する。この監視制御装置は、これらの信号を、少なくとも一つの所定の監視ルールに基く、ファジィ論理を利用して解析し、適当なポンプに、必要に応じて周期的継続を基準に、そのポンプによって生じた流体の流量を調節するために出力信号を供給する。例えば、1組の監視ルールが、心拍数および血圧が高いか、正常か、または低いかに基づいて、限外濾過速度の増加または減少を、または故障状態によるこの処置の中止さえ決めてもよい。
【0024】
更に追加の代替実施例では、このコンピュータ制御装置が、このシステムの注入液、排出液および血液ポンプの少なくとも一つのポンプ流量を制御するために適応制御システムを組込む。この適応制御装置は、適応制御すべき各ポンプにおよびその関連する流量センサに機能的に接続してある。この適応制御装置は、制御されるポンプが発生した流体の流量を測定する、流量計または重さ秤のような、センサからの流体流量に相関する流量データ信号を受ける。この適応制御装置は、この流量の所定の流量からの時間依存偏差を補正するための1組の制御装置パラメータを発生するために適応法則を使って制御装置パラメータベクトルを計算する。これらの制御装置パラメータに基づいて、この適応制御装置は、次に制御法則を使用して、所定の流量を達成するためにこのポンプが発生した流体のポンプ流量を調節するための出力信号を発生する。最後に、この制御装置は、このポンプに、周期的継続を基準に、流体流量を調節するための出力信号を提供する。一つの側面で、この適応制御装置は、ポンプをポンプ運転の線形状態に維持するように出力信号の範囲を制限するためにパラメータ予測を使ってもよい。
【0025】
本発明による患者の血液から流体を除去する血液ろ過システムを制御する方法は、 第1のポンプを用いて血液ろ過システム内の、注入液、排出液、血液からなるグループから選択された流体を汲出す工程と、監視制御装置により流体の流量を測定して、上記流体の流量に相関する流量データ信号を発生する工程と、患者パラメータをセンサによって測定して、前記患者パラメータと相関する患者のデータ信号を発生する工程と、前記監視制御装置によって患者パラメータデータ信号を測定して患者パラメータデータ信号を発生する工程と、前記監視制御装置によって前記流量データ信号と患者パラメータデータ信号を、少なくとも一つの監視ルールを有するファジィ論理の推論エンジンを用いて分析する工程とを含み、該ファジィ論理の推論エンジンに用いられる少なくとも一つのメンバーシップ関数の幅が所望の限外濾過速度に依存し、更に、前記流量データ信号と患者パラメータデータ信号の前記分析に応答して前記監視制御装置により周期的且つ継続的に流体流量を調節して、患者の血液からの液体の除去を調節する工程とを備える。
本発明の方法の好適実施例では、患者からの血液を血液フィルタを通して汲出し、第1溜に保持してある注入液の補給をこの第1溜からこの血液フィルタを通して、この血液に逆流して汲出す。この第1溜の中の注入液の重量を絶えずモニタし、その重量に相関するデータ信号を発生する。排出液(例えば、消費した注入液)をこの血液フィルタから汲出し、第2溜で受ける。この第2溜の中の排出液の重量を絶えずモニタし、それに相関するデータ信号を発生する。注入液および排出液の重量に相関する信号をシステム制御装置によって規則的間隔に(例えば、毎分)問い合せ、この制御装置のメモリの中の対応する所定の計算した重量と比較する。この制御装置は、患者の血液からの流体の引出し量および速度を決定する。もしこれらの値が所定の、予めプログラムした所望値と異なるならば、制御装置は、所望量の流体除去を達成するように、注入液および排出液ポンプのポンプ流量を独立に調節する制御信号を発生する。これらの制御信号は、血液ポンプ流量も制御してよい。
【0026】
本発明の方法の代替実施例では、注入液および排出液重量モニタ並びにポンプ制御と独立にまたはそれらに加えて、このコンピュータ制御装置が先に議論したモニタシステムの一つ以上と連結してもよい。この実施例では、制御装置は、選択した患者パラメータデータを受け、評価しおよび所望量の流体除去を達成するために注入液、排出液および血液のポンプ流量を制御する、適当な、応答制御信号を発生することによって応答する。これは、注入液および排出液重量モニタと組合わせてまたは独立に達成してもよい。
【0027】
本発明の方法の代替実施例では、血液濾過システムのポンプが発生した流体流の流量データ信号並びに、心拍数および血圧のような、患者パラメータデータ信号を監視制御装置へ供給する。流量データ信号は、注入液か排出液の重量の変化率から、または血液流量から得る。これらの信号を少なくとも一つの所定の監視ルールに基づくファジィ論理を使って解析し、出力信号を適当なポンプに、必要に応じて周期的継続を基準に、そのポンプが発生する流体の流量を調節するために提供する。
【0028】
本発明の方法の更にもう一つの代替実施例では、血液濾過システムのポンプが発生した流体流に対する流量データ信号を適応制御装置に供給する。流量データ信号は、注入液か排出液の重量の変化率から、または血液流量から得る。1組の制御装置パラメータを、流量の所定の流量からの時間依存偏差を補正する際に使うためにこれらの流量信号から発生させる。これらの信号およびパラメータを、出力信号を発生するために制御法則を使って解析する。この出力信号を、周期的継続を基準に、適応制御するポンプにあたえる。
【0029】
本発明のシステムおよび方法の利点は、少なくとも一部、もし必要ならば、患者の血液からの理想的または理想に近い流体除去を達成するための、流体重量、およびその他の選択した患者パラメータデータの連続モニタおよび周期的問い合せ、並びに、血液ポンプ流量を含む、それに反応する流体ポンプ流量の調節によって達成する。更に、この監視システム制御装置および適応システム制御装置は、ポンプ流量を精密且つ正確に調節および制御する、閉ループ、フィードバック制御システムを実現する。本発明のシステムおよび装置の更なる特徴および利点は、添付の図面および以下の詳細な説明を参照すれば明白となろう。
【図面の簡単な説明】
【0030】
【図1】本発明のシステムの一実施例の図表示であり;変形を仮想線で示す。
【図2】本発明のシステムの代替実施例の図表示である。
【図3】血液濾過システム用階層制御アーキテクチャを図式的に示す。
【図4】図3の監視制御装置によって行われるファジィ論理過程を図式的に示す。
【図5】この監視制御装置で実現した監視制御アーキテクチャを表す。
【図6A】ファジィ論理制御システムに入力した血圧データ信号用の1組のメンバーシップ関数である。
【図6B】ファジィ論理制御システムに入力した心拍数データ信号用の1組の入力メンバーシップ関数である。
【図6C】ファジィ論理制御システムから出力される限外濾過速度の変化を表す信号用の1組の出力メンバーシップ関数である。
【図7A】限外濾過シミュレーション用血液ポンプの追跡誤差のグラフ表示である。
【図7B】限外濾過シミュレーション用制御電圧のグラフ表示である。
【図7C】限外濾過シミュレーション用制御装置パラメータのグラフ表示である。
【図8A】限外濾過シミュレーション用血液ポンプ追跡誤差のグラフ表示である。
【図8B】限外濾過シミュレーション用排液ポンプ追跡誤差のグラフ表示である。
【図8C】限外濾過シミュレーション用第1補充ポンプ追跡誤差のグラフ表示である。
【図8D】限外濾過シミュレーション用第2補充ポンプ追跡誤差のグラフ表示である。
【図9A】限外濾過シミュレーション用排液ポンプ追跡誤差のグラフ表示である。
【図9B】限外濾過シミュレーション用制御電圧のグラフ表示である。
【図9C】限外濾過シミュレーション用制御装置パラメータのグラフ表示である。
【図10A】限外濾過シミュレーション用心拍数のグラフ表示である。
【図10B】限外濾過シミュレーション用血圧のグラフ表示である。
【図10C】限外濾過シミュレーション用のファジィシステムIで計算した所望の排液流量のグラフ表示である。
【図11A】限外濾過シミュレーション用心拍数のグラフ表示である。
【図11B】限外濾過シミュレーション用血圧のグラフ表示である。
【図11C】限外濾過シミュレーション用のファジィシステムIIで計算した所望の排液流量のグラフ表示である。
【図12A】限外濾過シミュレーション用心拍数のグラフ表示である。
【図12B】限外濾過シミュレーション用血圧のグラフ表示である。
【図12C】限外濾過シミュレーション用のファジィシステムIIIで計算した所望の排液流量のグラフ表示である。
【図13A】限外濾過シミュレーション用心拍数のグラフ表示である。
【図13B】限外濾過シミュレーション用血圧のグラフ表示である。
【図13C】限外濾過シミュレーション用のファジィシステムIVで計算した所望の排液流量のグラフ表示である。
【図14A】限外濾過シミュレーション用心拍数のグラフ表示である。
【図14B】限外濾過シミュレーション用血圧のグラフ表示である。
【図14C】限外濾過シミュレーション用のFSIIIで計算した所望の排液流量のグラフ表示である。
【図14D】限外濾過シミュレーション用血液ポンプ流量のグラフ表示である。
【実施例】
【0031】
図1は、本発明のシステムの好適実施例の図表示を示す。図1の仮想線で示す部分は、以下に説明する、本発明の代替実施例を表す。血液濾過システム10は、全体を12で示す適当な制御装置によって運転および制御する。制御装置12は、ディスプレイ13を有するプログラム可能コンピュータでもよく、以下に詳細に説明するように、血液濾過システム10の種々の部品に機能するように接続してある。
作動する際、血液ポンプ16によって、血液を、成人、小児または新生児でもよい患者(図示せず)から適当なカテーテル(図示せず)および入力配管14を介して汲出す。血液ポンプ16は、ローラ型であるのが好ましく、線18によって制御装置12に機能するように接続してある。一つの適当な血液ポンプは、米国ミネソタ州ミネアポリスのレーナルシステムズが製造するRS−7800ミニポンプである。患者の血液を通す入力配管14は、ポンプ16の上流に圧力変換器20を含むのが好ましい。圧力変換器20は、線21を介して制御装置12に機能するように接続してある。医薬品およびヘパリンのような抗凝血配合物を含む所望の流体を患者の血液に注射または注入できるために入力配管14にアクセスするための手段が血液ポンプ16の下流に含めてある。そのような流体の血液への注射または注入は、何か適当な方法で達成してもよく;図1は、注射器および管装置22を図式的に示すが、同じ目的で他の手段を使ってもよいことが分るだろう。
【0032】
患者の血液を血液ポンプ16によって血液フィルタ24を通して圧送する。本発明のシステムに使うのに適する型式のフィルタは、容易に入手でき;適当な血液フィルタの一例は、米国マサチューセッツ州デンバーのアミコンが製造するダイアフィルタである。本システムを血漿交換を行うために使用する場合、米国カリフォルニア州アービンのパーカ・ハンニフィンが製造するプラズマフロのような、適当な血漿交換フィルタを使うことができる。
【0033】
入力配管14は、血液フィルタ24の僅かに上流に第2圧力変換器26を含む。圧力変換器26は、線28を介して制御装置12に機能するように接続してある。患者の血液は、血液フィルタ24を出て、出力配管30を通過し、および静脈カテーテル装置(図示せず)のような何か適当な手段を介して患者へ戻される。出力配管30は、このシステムに血流があることを検証する適当な血流検出器31および気泡が患者へ通過するのを防ぐための気泡クランプ32のような気泡/泡制御装置を含むのが好ましい。血流検出器31および気泡クランプ32は、制御装置12に機能するように接続(図示せず)してもよく、または直接ポンプに接続して血液中に気泡を検出するとまたは血流が停止すると全てのポンプをインタロックしてもよい。適当な泡−気泡検出器は、レーナルシステムズが製造するRS−3220Aである。出力配管30も血液フィルタ24の直ぐ下流に圧力変換器34を含むのが好ましい。圧力変換器34は、線36を介して制御装置12に機能的に接続してある。
【0034】
第1溜50がここでは一般的に注入液52と呼ぶ、適当な透析液またはその他の流体の供給を維持する。注入液の入った溜50を、線56を介して制御装置12に機能的に接続してある電子秤54のような計量装置によって支持してある。注入液52を、好ましくはローラ型である、注入液ポンプ60によって配管58を介して溜50から汲出す。この目的に適当なポンプは、米国オハイオ州クリーブランドのペムコが製造する31/2”(88.8mm)ローラポンプである。注入液ポンプ60は、線62を介して制御装置12に機能的に接続してあり、注入液52を血液フィルタ24を通してそこを通る血液に逆流して圧送する。既知の原理によれば、注入液52は、血液フィルタ24を通過する血液からある成分(流体および/または可溶性老廃物)を抽出するかも知れない。血液フィルタ24から排出した流体は、消費した注入液および血液から除去した成分を含み、それらをここでは排出液76と呼ぶ。システム10を、例えば、血漿交換を行うために、流体または血漿交換システムとして使用する代替実施例では、溜50から(血漿でもよい)注入液を配管59(仮想線で示す)を介して血液出力配管30へまたは配管59a(やはり仮想線で示す)を介して入力配管14へ送込み、それによって血液から除去した流体量を補充する。この実施例で、血液フィルタまたは血漿交換フィルタ24からの排出液76は、注入液を血液出力配管30または入力配管14へ直接送込み、患者へ供給するので、消費した注入液を何も含まない。
【0035】
排出液76は、好ましくはローラ型でありおよび注入液ポンプ60と同じでもよい、排液ポンプ66によって血液フィルタ24から出力配管64を通して汲出される。排液ポンプ66は、線68を介して制御装置12に機能的に接続されている。排液ポンプ66は、血液フィルタ24の下流、排液ポンプ66の上流に圧力変換器70を含むのが好ましい。圧力変換器70は、線72を介して制御装置12に機能的に接続してある。出力配管64も、もし血液フィルタ24が破損すると起るかも知れない、排出液76内の血液の存在を検出する血液漏れ検出器67を含むのが好ましい。適当な血液漏れ検出器67は、米国コロラド州レークウッドのコーベが500247000型として販売する。血液漏れ検出器67は、制御装置12に機能的に接続(図示せず)してもよく、またはこれらのポンプに直接接続して排出液中に血液を検出すると全てのポンプをインターロックしてもよい。血液フィルタ24から汲出した排出液76は、排出液を収集する第2溜74に送込む。第2溜74は、線80を介して制御装置12に機能するように接続してある、電子秤78のような計量装置で支持してある。
【0036】
秤54および78は、米国マサチューセッツ州アクトンのセトラが販売する140CO型でもよく、溜50および74に、それぞれ、入っている注入液および排出液の重量と相関する重量データ信号を絶えず発生する。これらの重量データ信号は、絶えず制御装置12へ送り、それにはこれらの秤が、RS−232インタフェースのような、データプロトコルを有するインタフェースを介してリンクしてある。2台の秤の代りに単一秤を利用でき、それによって溜50と74の間の重量差をモニタし、対応するデータ信号を発生することが分るだろう。圧力変換器20、26、34および70は、全て血液濾過システム10のそれらそれぞれの場所で圧力を絶えず測定し、それに相関する圧力データ信号を発生し、それらを制御装置12へ送る。適当な型式の圧力変換器は、米国コロラド州レークウッドのコーベが販売する型番042−904−10である。このシステム10にこれらの圧力データ信号によって表されるような、ある所定の警報または危険状態が存在するとき、この制御装置は、注入液、排出液、若しくは血液のポンプ流量、若しくはそれらの組合せを調節するか、またはこのシステムを完全に運転停止する。
【0037】
制御装置12は、圧力変換器20、26、34および70、第1および第2秤、それぞれ、54および78、並びに血液ポンプ16、注入液ポンプ60、および排液ポンプ66を含む補助装置からの信号を送受信できる、プログラム可能コンピュータであるのが好ましい。作動する際、制御装置12は、規則的間隔で、この第1および第2秤、54および78が発生する重量データ信号を問い合せる。これらの信号から、制御装置12は、第1および第2溜の中の注入液および排出液の重量をその時点で決定し、これらの重量を制御装置12にプログラムし且つ記憶してある、対応する所定の計算した重量と比較する。溜50の中の注入液の重量および溜74の中の排出液の重量を規則的な間隔でモニタすることによって、これらの重量の変化速度および血液濾過速度を制御装置12のコンピュータ部分によって計算できる。これらの重量が所定の計算した重量から逸脱するとき、および/または血液濾過速度が所定の、プログラムした所望の速度から逸脱するとき、制御装置12は、必要に応じて、血液ポンプ16、注入液ポンプ60および排液ポンプ66を運転する速度を制御または調節する制御信号を発生して、この血液濾過速度を所望の速度へ調節し、または予め選択した限界に達したときこれらのポンプを停止する。これは、血液濾過の所望の量および/または速度を実現するために、連続した方法;即ち、必要に応じて、連続重量データ信号発生、これらの重量データ信号の周期的問い合せおよび必要な重量および/または速度情報の計算、所定の計算値との比較およびこれらのポンプのポンプ流量の自動調節で達成する。
【0038】
制御装置12は、血液ポンプ16が運転しているときだけ、注入液ポンプ60および排液ポンプ66が運転するようにプログラムしてある。限外濾過を行っている場合、排液ポンプ66のポンプ流量は、注入液ポンプ60のポンプ流量プラス所望の限外濾過速度に等しくなければならない。
【0039】
制御装置12は、絶えず圧力変換器20、26、34および70から圧力データ信号を受け、モニタする場所の何れかで高および低圧力限界を超えるとき、警報信号を発生するようにプログラムしてある。更に、特に圧力変換器26、34および70によってモニタする、血液フィルタ24を跨ぐ圧力差が所定の上限を超えるとき、警報信号を発生する。その上、制御装置12は、例えば、もしこのシステムの配管が閉塞または破損し、またはもしポンプの閉塞が起ったならば起るかも知れないような、予め選択した圧力限界(高または低)を超えるとき、これらのポンプを止めるかも知れない。最後に、制御装置12は、溜50の中の注入液レベルが所定の下限に達するとき、および溜76の中の排出液レベルが所定の上限に達するとき、信号を出すかも知れない。血液濾過システム10は、血液および注入液温度を所望のレベルに調節しおよび/または維持するために、適当な血液加温および注入液加温装置(図示せず)も含むかも知れない。そのような装置も、流体温度が予め選択した限界外であるとき、警報信号を発生するかも知れない。
【0040】
ディスプレイ13は、圧力、圧力差、温度、注入液、排水および限外濾過の流速および量、並びに警報状態のような、測定し且つ計算したパラメータの更新した表示を提供する。制御装置12は、可視と可聴の両方の警報を発生し、全てのポンプが警報状態の下でその運転を防ぐためにインタロックしてある。ユーザは、綿密な監督の下で処置を行うために、これらの警報(警報の可聴部分とそのポンプとのインタロック)を使用禁止または無能にする選択肢を有する。プリンタ(図示せず)が制御装置12に機能するように接続(図示せず)してあり、目下表示したまたは規則的間隔で記憶した処置データのハードコピーを、処置が完了したときまたは任意の所望のときに発生する。
【0041】
血液濾過システム10は、二つのモード:1)血液ポンプ16、注入液ポンプ60および排液ポンプ66のポンプ流量が、固定電圧を印可するとき制御装置12によって与えられる手動モード;および2)これらのポンプが制御装置12に所望の血液濾過量または速度をプログラムしたとき、この制御装置によって制御される自動モードの一つで運転できる。この自動モードは、このシステムを休止して先に測定し且つ計算したデータを失うことなく後に続けることを可能にする。
【0042】
図2は、本発明の血液濾過システム10の幾つかの代替実施例の代表的なものを図表示する。図1に描くシステムと比較して図2のシステムの多くの部品の共通性のために、類似の参照番号は、類似の部品を示すことを意図する。更に、図2のシステム部品は、図1に示し且つ上に説明した対応するシステム部品と同様に作用する。入力配管14は、更に、血液フィルタ24の僅かに上流に流量計または流量プローブ27を含む。この流量プローブ27は、線29を介して制御装置12に機能的に接続してある。適当な流量プローブ27は、トランソニック・システムズ社が製造する超音波流量プローブである。他の適当な型式の流量計には、ベアリングレス回転式流量計、ドップラ流量計、および差動電磁流量計がある。
【0043】
図2の血液濾過システムは、更に、制御装置12と、血液ガス100、ヘマトクリット110、患者の心拍数120、患者の血圧130およびその他の多数の患者パラメータ(全体を140で示す)のような選択した患者パラメータに対応するパラメータデータ信号を発生するモニタシステムとの間のインタフェースを含み、この他のパラメータは、以下のものの一つ以上でもよい:動脈圧、中央静脈圧、肺動脈圧、平均動脈圧、毛管楔入圧、全身血管抵抗、心拍出量、呼気終末O2およびCO2、中心および周辺体温、並びに患者体重。血液ガスセンサ100とヘマトクリットセンサ110は、入力配管14に接続してあるとして図示するが、これらのパラメータは、配管14を介してでなく患者に直接関連する手段によってモニタすることもできる。実際、静脈O2飽和度を図示のように測定できるので、動脈O2飽和度は、モニタを他の場所にする必要があるだろう。全患者体重パラメータは、この技術で周知のように、標準患者ベッド秤(図示せず)を利用してモニタできる。
【0044】
この血液濾過処置中、種々の患者パラメータの一つ以上を絶えずモニタし、この制御装置は、操作員の選択で、この制御装置に供給される選択されたパラメータに応答するだろう。このパラメータデータは、この制御装置によって注入液および排出液重量データ信号と独立に評価および応答されてもよく;即ち、このシステムは、重量データ信号ではなく、選択されたパラメータの一つ以上に基づいて動作および応答してもよく;またはこのシステムは、重量データ信号と選択されたパラメータの一つ以上との組合せに応答してもよい。
【0045】
一つ以上の独立の患者注入ポンプ150が、患者への静脈内液、医薬品、非経口栄養剤および/または血液製剤の注入に相関するデータ信号を供給するためにコンピュータ制御装置12とインタフェースで接続してもよい。制御装置12は、このデータを評価し、これらの注入ポンプによって患者へ給送する外部からの流体を補償するように、注入液、排出液および血液のポンプ流量に修正を施す。これに関して、患者の全体の流体バランスをこの血液濾過処置と同時に管理できる。
【0046】
システム10を限外濾過処置または血液透析処置を行うために使う代替実施例では、溜50からの注入液(それは、カルシウム補充液または重炭酸塩補充液のような補充液の一つ以上でもよい)を配管59(仮想線で示す)を介して血液出口配管30へ、または配管59aを介して入力配管14へ送込み、それによって血液から除去した物質および液量を埋め合せる。この実施例で、血液フィルタ24からの排出液76は、注入液を直接血液出力配管30へ送込んで患者へ供給するので、消費した注入液を何も含まない。更にもう一つの代替実施例では、別の補充液を、一つ以上の注入液ポンプ60を有するシステムによって提供してもよい。例えば、注入液ポンプ60が配管59を介して血液出口配管30に第1補充液を給送するための第1注入液ポンプでもよく、且つこのシステム10は、更に、1本の配管(図示しないが配管59に類似する)を介して血液出口配管30に第2補充液を給送するための第2注入液ポンプ(図示せず)を含む。
【0047】
図3は、以後まとめて限外濾過処置と呼ぶ、限外濾過または血液透析処置を行うために血液濾過システム10でポンプ流量を制御するために図2のコンピュータ制御装置12によって実施できる階層制御アーキテクチャを表す。図1および図2に描くシステムと比較して図3のシステムの多くの部品の共通性のために、類似の参照番号は、類似の部品を示すことを意図する。更に、図3のシステム部品は、図1および図2に示し且つ上に説明した対応するシステム部品と同様に作用する。ここに開示する階層制御アーキテクチャは、“連続静-静脈血液濾過のインテリジェント制御”エフレインO.モラール、修士論文、シンシナティ大学、電気およびコンピュータ技術並びにコンピュータ科学部、および“連続静-静脈血液濾過の階層的適応および監視制御”エフレインO.モラール、マリオスM.ポリカーパス、ナット・ヘマシルピン、およびジョンJ.ビスラー、(発表のIEEE制御システム技術会報へ提出)、に記載してあり、その双方を参考とされたい。
【0048】
図3を参照して、この監視制御装置160は、血液ポンプ16、排液ポンプ66、および1対の注入液ポンプ60、即ち、炭酸塩補充ポンプ60aおよびカルシウム補充ポンプ60bを制御する。ポンプ60a、60bは、この限外濾過処置中に患者から除去した液量を補充するために補充液を提供する。患者へ供給する各補充液の実際に重量ωrep1(n)、ωrep2(n)は、サンプル周期nの頻度で、それぞれ、電子秤54a、54b(各秤は、図2に示す秤54に類似する)によってモニタする。典型的限外濾過処置では、このサンプル周期が1秒のオーダである。この排出液の実際の重量ωdra(n)は、電子秤78によってモニタする。この限外濾過速度は、排出液重量の変化率と補充液重量の変化率の間の差として計算する。血液ポンプ16からの実際の流量qblo(n)を流量プローブ27によって得られる。
【0049】
血液ポンプ16は、制御装置12で実現し且つ監視制御装置160によって基準指令入力として計算した所望の流体流量q*blo(n)を受ける適応ポンプ制御装置162によって制御する。このポンプ制御装置162は、所望のポンプ流量に対応し且つq*blo(n)に比例する電圧ublo(n)を伝達するために線18を介して血液ポンプ16に機能的に接続してある。流量プローブ27によって測定した実際の流量qblo(n)は、線29を介して監視制御装置160におよびポンプ制御装置162にフィードバック信号として与える。ポンプ制御装置162は、更に、追跡性能を示す制御装置パラメータベクトルθbloを監視制御装置160に与える。
【0050】
排液ポンプ66は、制御装置12で実現し且つ監視制御装置160によって基準指令入力として計算した所望の重量信号ω*dra(n)を受ける適応ポンプ制御装置170によって制御する。このポンプ制御装置170は、所望のポンプ流量に対応し且つω*dra(n)の変化率に比例する電圧udra(n)を伝達するために線68を介して排液ポンプ66に機能的に接続してある。秤78によって測定した実際の重量ωdra(n)は、線80を介して監視制御装置160におよびポンプ制御装置170にフィードバック信号として与える。ポンプ制御装置170は、更に、追跡性能を示す制御装置パラメータベクトルθdraを監視制御装置160に与える。
【0051】
重炭酸塩補充ポンプ60aおよびカルシウム補充ポンプ60bは、共に制御装置12で実現し且つ監視制御装置160によって基準指令入力として計算した所望の重量信号ω*rep1(n)、ω*rep2(n)を受けるそれぞれの適応ポンプ制御装置180a、180bによって制御する。このポンプ制御装置162は、所望のポンプ流量に対応し且つそれぞれω*rep1(n)、ω*rep2(n)の変化率に比例するそれぞれの電圧urep1(n)、urep2(n)を伝達するために、それぞれの線62a、62b(図2に示す線62に類似)を介してそれぞれのポンプ60a、60bに機能的に接続してある。それぞれの秤54a、54bによって測定した実際の重量ωrep1(n)、ωrep2(n)は、線56a、56bを介して、それぞれ、監視制御装置160におよびそれぞれのポンプ制御装置180a、180bにフィードバック信号として与える。各ポンプ制御装置180a、180bは、更に、所望の流量と実際の流量の間の追跡性能を示すそれぞれの制御装置パラメータベクトルθrep1、θrep2を監視制御装置160に与える。
【0052】
監視制御装置160は、ポンプ16、60a、60b、66を各々線形システムと見做せるように、入力飽和非直線性を除去するためにパラメータ予測機能を使用する。制御装置パラメータの適応は、例えば、配管直径の変化および血液フィルタ特性の劣化、変化、または血液管路の流れ抵抗の変化のために、流量に時間変動があっても、ポンプ制御装置162、170、180a、180bの追跡の向上を可能にする。
【0053】
もしそれぞれの印加電圧udra(n)、urep1(n)、urep2(n)がポンプ運転の直線領域に限られるなら、補充ポンプ60a、60bおよび排液ポンプ66を各々時変自動回帰移動平均(ARMA)適応制御アルゴリズムによって適切にモデル化する。この適応制御アルゴリズムは、次のように表せる:
ω(n)-b*1(n-1)ω(n-1)+b*2(n-1)ω(n-2)=a*0(n-1)+a*1(n-1)u(n-1)
それは、実際の重量ωdra(n)、ωrep1(n)、ωrep2(n)および対応する印加電圧udra(n)、urep1(n)、urep2(n)に関係する。それぞれのシステムパラメータの独特の組a*0、a*1、b*1、b*2を各ポンプ60a、60b、66に付与する。これらのシステムパラメータa*0、a*1、b*1、b*2は、外乱がないときにゆっくりと変動すると仮定した未知の時変パラメータであり、a*1は、このポンプモータがローラを逆方向に回転することは決してないので、正と決め込む。バイアスパラメータa*0は、ポンプが非ゼロ電圧に対して流体流れを誘発しないことが可能であるので、この式に含める。
【0054】
所望の重量信号ω*(n)を追跡するように設計した、直接適応制御方式を使って、この制御電圧を次の式から決める:
u(n-1)=θT(n-1)φ(n-1)
θT(n-1):=[θ1(n-1)θ2(n-1)θ3(n-1)θ4(n-1)]
φT(n-1):=[1-ω(n-1)-ω(n-2)ω*(n)]
但し、θ(n)は、その成分が適応法則によって発生する制御装置パラメータであるベクトルであり、φ(n)は、回帰ベクトルで、但し全てのn≧0に対して|φ(n)|≧1である。もし、e(n):=ω(n)−ω*(n)が蓄積した流体重量に対するトラッキング誤差を表すならば、このトラッキング誤差は、次の式を満足する:
e(n)=a*1(θ(n-1)-θ*)Tφ(n-1)
但し、θ*は、未知の“最適”パラメータベクトルを表し、
【0055】
【数1】
【0056】
θ*のサンプル時間への依存性は明確でないが、θ*は、時間と共にゆっくりと変動し、それがオンラインパラメータ推定および適応制御技術を利用する主な動機の一つである。一般的に、線形時変システムに対する安定的な適応制御の誘導は複雑である。ポンプ動特性の緩時変性のために、θ*定数での標準適応制御法が本発明に十分であることが分った。
【0057】
限外濾過システムのポンプは、一般的に運転の下端および上端で飽和挙動を示す。特に、ある電圧レベル以下で、ポンプのローラが回転を止め、流体の流れが止る。同様に、一般的にポンプ製造業者が指定する、最大許容制御電圧がある。ポンプに対する制御信号の飽和のために、この標準適応制御は、不等式u1≦θT(n)φ(n)≦uh、但し、u1およびuhは、それぞれ、最小および最大許容制御電圧、が成立するように修正しなければならない。この時変パラメータ不確実性および入力飽和に対応するため、以下の平面射影による正規化した傾斜適応法則を適用する:
【0058】
【数2】
【0059】
但し、適応刻み幅γ0は、それが0<γ0<2[supna*1(n)]-1、を満足するように選択し、但し、a*1の上限は既知とする。インジケータ関数I(・,・)は、次のように定義する:
【0060】
【数3】
【0061】
射影項P(n)は、もし、μT(n)φ(n-1)<u1ならば、制御装置パラメータθ(n)が超平面θTφ(n-1)-u1=0上に射影されることを保証する。同様に、もし、μT(n)φ(n-1)>uhならば、制御装置パラメータθ(n)が超平面θTφ(n-1)-uh=0上に射影されるだろう。それでパラメーター推定θ(n)は、制御電圧がu1とuhの間の値に制限されるように適応させられる。
【0062】
もし、印加電圧ublo(n)をポンプ運転の線形領域に限定するならば、血液ポンプ16は、ARMA適応制御アルゴリズムによって適切にモデル化され、それを次のように表すことができる:
qblo(n)+b1blo(n-1)qblo(n-1)=a0blo(n-1)+a1blo(n-1)ublo(n-1)
それは、実際の流量qblo(n)およびn番目のサンプル時間での印加電圧ublo(n)に関係する。システムパラメータa0blo、a1blo、b1bloは、外乱がないとき、時の経つにつれゆっくりと変動すると仮定し、a1bloは正であると仮定する。
【0063】
最小印加電圧は、血液ポンプ16のローラが摩擦に打ち克って回転できる電圧の僅かに上の値に選択する。もし、印加電圧がこの最小電圧より下に決して落ちないならば、この限外濾過処置中、血流が決して静止せず、凝固の可能性が減少する。この最小電圧は、使用する配管の特性に依存するだろう。典型的最小電圧は、0.3ボルトである。最大電圧は、ポンプ製造業者によって与えられるだろう。典型的最大電圧は、3.2ボルトである。
【0064】
この制御法則は、直接適応制御方式に知られるように、ublo(n)=θTblo(n)φblo(n)によって表され、但し、θblo(n)は、三つの制御装置パラメータから成るベクトルであり、φblo(n)は次の式によって与えられる:
φTblo(n-1)=[1-qblo(n-1)q*blo(n)]
この所望の流量は、低域通過フィルタの出力で
【0065】
【数4】
【0066】
それは、所望の流量で必要な変化に対して滑らかな応答を与える。例えば、血液ポンプ16始動は、カテーテルが容器壁に引寄せられないように滑らかだろう。
【0067】
図4は、一般的に、限外濾過処置のようなプロセスを制御するために意思決定するための、例えば、コンピュータ制御装置12で実現した監視制御装置160によるような、マイクロプロセッサで実現できるファジィ論理過程を示す。ファジィ論理理論からよく知られているように、ファジィ論理制御システム190は、一般的にファジィ化装置192、推論エンジン194、およびプラント198を制御するための非ファジィ化装置196を含む。ファジィ化装置192は、一つ以上の個別入力データ信号200を受け、1組のメンバーシップ関数でメンバーシップの度合を割当てることによってファジィ集合を作る。推論エンジン194は、ファジィ・ルールベース202に基づいて入力信号200から一つ以上のファジィ推論を作る。非ファジィ化装置196は、1組の出力メンバーシップ関数に基づいてこのファジィ推論をデファジファイし、プラント198に個別出力制御信号204を与える。ファジィ・ルールベース202は、制御されるシステムの操作上のプロトコルに関するエキスパート知識を含み、且つプラント198を制御するための“IF−THEN”ルールの集合を含む。非ファジィ化装置196は、これらのファジィ推論をデファジファイするためにファジィ論理の技術で知られる種々の数学的手法を適用してもよい。プラント198は、このプラント198の性能に関するフィードバック情報を、推論エンジン194で使うために、このファジィ論理制御システム190に供給してもよい。
【0068】
ファジィ化および非ファジィ化は、測定した物理量(入力200および出力204)とファジィ推論エンジン194の間に必要なインタフェースを構成する。結果の数学的関係がファジィシステムである。このファジィシステムは、入力として厳密な値を受け、これらの値からファジィ集合を作り、指定したルールベース202から推論を作り、および推論したファジィ出力を非ファジィ化することによって厳密な出力を提供する。
【0069】
本発明では、プラント168が血液濾過システム10であり、ファジィ論理制御システム190を、ポンプ16、60a、60b、66を制御するためのコンピュータ制御装置12でソフトウェアによって実現し、および入力データ信号200が患者の心拍数120および患者の血圧130である。患者の心拍数120は、一般的には1分当り脈拍(bpm)で測定し、および患者の血圧130は、一般的には水銀柱ミリメートル(mmHg(=133.3Pa))で測定する。医者の専門臨床知識によって、心拍数120(Rh)および血圧130(Pb)に基づき限外濾過速度を修正するための代表的ファジイ・ルールベース202は、以下の監視ルールの集合を有する:
監視ルール(1):もしRhが高く且つPbが正常かまたは低ければ、限外濾過を
減少する。10分間待つ。
監視ルール(2):もしPbが低く且つRhが正常かまたは高ければ、限外濾過を
減少する。10分間待つ。
監視ルール(3):もしPbとRhの両方が低ければ、ユーザに限外濾過速度の減
少または増加の選択をさせる。5分間待つ。
監視ルール(4):もしPbとRhの両方が連続30分間高ければ、ユーザに限外
濾過速度の減少または増加の選択をさせる。
監視ルール(5):もしPbが高く且つRhが連続60分間低ければ、限外濾過を
増す。
監視ルール(6):限外濾過の最低可能値は、0ml/h。限外濾過速度の最高
可能値は、医者が指定する限外濾過速度のそれの上30%で
あり、それでもし望むなら、限外濾過処置中に変えることが
できる。
監視ルール(7):もし限外濾過の増加が、濾過率(所望の血液流量に対する所
望の排液流量の比に比例)が20%を超えるように起るなら
ば、濾過率が0.2に等しいように血液ポンプ流量を増す。
監視ルール1〜5は、ファジィ論理技術を使って実現し、一方監視ルール6および7は、標準スイッチング(厳密な)論理法に基づく監視アルゴリズムに組込んだ。監視ルール1〜5の待機指示は、各ルールに局部的である。例えば、もし、監視ルール1を満足するために限外濾過を減少するならば、監視ルール10は、10分経過するまでは再び運用できない。しかし、もし監視ルール2〜7の一つを後に始動するならば、限外濾過速度を修正してもよい。監視ルールの他の集合は、当業者には明白だろうし、これらの監視ルールを本発明の範囲および精神から逸脱することなくそのように変えてもよい。例えば、監視ルールの時間独立集合を以下に公式化する。
【0070】
心拍数および血圧の高および低閾値、それぞれ、(Rhigh、Rlow)および(Phigh、Plow)を患者のサイズおよび心臓血管の状態に基づいて監視制御装置160に指定する。監視制御装置160がこれらの閾値を使って以下の不等式に従って心拍数120および血圧130の大きさの特徴を決定する。もし、Rlow<Rh<Rhighならば、心拍数120を正常と見做す。もし、Rlow>Rhならば、心拍数120を低いと見做し、およびもし、Rh>Rhighならば、心拍数120は高い。類似の不等式を適用して血圧130の特徴を決定する。患者の心臓血管の状態の変化に対応するために、限外濾過処置中にこれらの閾値を変更してもよい。
【0071】
図5は、時間を入力パラメータとしては除去した、本発明の原理による監視制御装置160を図式的に示す。この監視制御装置160は、スイッチロジック250が心拍数120および血圧130が低いか、正常か、または高いかに基づいて作動させる四つの別々のファジィシステム210、220、230、240を含む。ファジィシステム210、220、230、240の一つだけが与えられた時間に作動してもよい。スイッチロジック250は、これらの監視ルールの要求に応じて限外濾過を監視調整する前後に、必要な時間待つ作業も行う。
【0072】
図6Aおよび6Bは、それぞれ、監視制御装置160へ提供する心拍数120および血圧130の入力データ信号用に決めた2組の入力メンバーシップ関数である。図6Cは、ファジィシステム210、220、230、240が作ったファジィ推論を非ファジィ化する際に使うための限外濾過速度の変化135を意味する出力データ信号用に決めた1組の出力メンバーシップ関数である。各メンバーシップ関数上の点は、信頼の程度を表し、0と1の間で変動し、何れかの単一入力データ信号120、130または出力制御信号135は、特定のファジィ領域に属する。重複のために、一つの入力データ信号120、130または出力制御信号135は、一つ以上のメンバーシップ関数に属するかも知れない。これらのメンバーシップ関数は、ファジィ論理の当業者には分るように、異なるグラデーションを有するように変化してもよい。
【0073】
各個々の入力メンバーシップ関数および出力メンバーシップ関数は、中心および全幅を有する別の曲線として定義する。この説明の例では、個々のメンバーシップ関数を、三角形(T)関数、右台形(RT)関数、左台形(LT)関数、または定数値(C)関数のような特有の形状を有する曲線から選択してある。代替特性形状は、本発明の精神および範囲から逸脱することなく所望の応答に依って選択することができる。
【0074】
図6A〜Cを参照して、表1は、以下の論議域のために入力および出力メンバーシップ関数を要約する:
【数5】
但し、q*ult(n)は、監視制御装置160を作動させたときの所望の限外濾過速度である。
【0075】
【表1】
【0076】
このファジィシステムへの入力は、患者の心拍数と血圧である。各ファジィシステム210、220、230、240の出力は、単一ファジィ化装置、各呼出したルールからのファジィ論理、および中心−平均非ファジィ化装置を組合わせることによって導出する。ファジィシステムの出力Δ(n)は、限外濾過速度への推奨変更135である。この変更は、補充液流を一定に保ち、排出液流量にΔ(n)を加えることによって実行する。即ち、一旦サンプル時間で限外濾過の変更Δ(n)を計算すると、それを次のように適用し:
q*rep1(n+1)=q*rep1(n)
q*rep2(n+1)=q*rep2(n)
q*dra(n+1)=q*dra(n)+Δ(n)
q*ult(n+1)=q*dra(n+1)-q*rep1(n+1)-q*rep2(n+1)
サンプル時間nとサンプル時間n+1の間にΔ(n)だけ変化した限外濾過速度を生ずる。これらの出力メンバーシップ関数は、それらがq*ult(n)に依存し、それでこれらに頼るファジィシステム写像も変るかも知れないので、サンプル毎に変えてもよい。この構成は、この限外濾過システムをどんなサイズの患者に使ってもよいように設定してある。例えば、新生児は、成人より流量に遙かに小さい変更しか要さず、あるメンバーシップ関数の幅によって反映される事実は、所望の限外濾過速度に依存する。
【0077】
ファジィシステム210(FSI)は、監視ルール1および2に決めるように、心拍数120が高いおよび/または血圧130が低い場合に適用し、限外濾過速度に加える負数を出力する。ファジィシステム210は、三つのファジィサブシステム210a、210b、210c(FSIA、FSIB、FSIC)を含む。もし、心拍数120が高く且つ血圧130が高いか低いならば、または心拍数120が高いか低く且つ血圧130が低いならば、スイッチロジック250がファジィシステム210を作動させる。スイッチロジック250は、ファジィシステム210の選択を10分間使用禁止にもして、どのファジィサブシステム210a、210b、210cが排出液流量の減少量を計算するかを選択する。
【0078】
スイッチロジック250は、もし、Rhが高く且つPbが正常ならば、ファジィサブシステム210aを作動させる。ファジィサブシステム210a用のファジィ・ルールベースは:
FSIAルール(1):もしRhがμu31ならば、Δはμy13である。
FSIAルール(2):もしRhがμu32ならば、Δはμy12である。
FSIAルール(3):もしRhがμu33ならば、Δはμy11である。
スイッチロジック250は、もし、Rhが正常で且つPbが高ければ、ファジィサブシステム210bを作動させる。ファジィサブシステム210b用のファジィ・ルールベースは:
FSIBルール(1):もしPbがμv11ならば、Δはμy11である。
FSIBルール(2):もしPbがμv22ならば、Δはμy12である。
FSIBルール(3):もしPbがμv33ならば、Δはμy13である。
スイッチロジック250は、もし、Rhが高く且つPbが低ければ、ファジィサブシステム210cを作動させる。ファジィサブシステム210c用のファジィ・ルールベースは:
FSICルール(1,1):もしPbがμv11でRhがμu31ならば、Δはμy11である。
FSICルール(1,2):もしPbがμv11でRhがμu32ならば、Δはμy11である。
FSICルール(1,3):もしPbがμv11でRhがμu33ならば、Δはμy11である。
FSICルール(2,1):もしPbがμv12でRhがμu31ならば、Δはμy12である。
FSICルール(2,2):もしPbがμv12でRhがμu32ならば、Δはμy12である。
FSICルール(2,3):もしPbがμv12でRhがμu33ならば、Δはμy11である。
FSICルール(3,1):もしPbがμv13でRhがμu31ならば、Δはμy13である。
FSICルール(3,2):もしPbがμv13でRhがμu32ならば、Δはμy12である。
FSICルール(3,3):もしPbがμv13でRhがμu33ならば、Δはμy11である。
【0079】
スイッチロジック250は、監視ルール3に決めるように、もし、心拍数120および血圧130が低くければ、ファジィシステム220(FSII)を作動させて、限外濾過速度の変化135を計算し、ファジィシステム220を10分間使用禁止にする。ファジィシステム220は、二つのファジィサブシステム220a、220b(FSIIA、FAIIB)を含む。限外濾過速度の変化135の方向が未定であるので、スイッチロジック250は、ユーザに限外濾過速度を増すべきか、減らすべきかを問い合せねばならない。ユーザは、この限外濾過速度を増すためにはファジィサブシステム220aを選択する。ファジィサブシステム220a用のファジィ・ルールベースは:
ルール(1):もしRhがμu11ならば、Δはμy23である。
ルール(2):もしRhがμu12ならば、Δはμy22である。
ルール(3):もしRhがμu13ならば、Δはμy21である。
その代りに、ユーザは、この限外濾過速度を減らすためにはファジィサブシステム220bを選択する。ファジィサブシステム220b用のファジィ・ルールベースは:
ルール(1):もしPbがμv11ならば、Δはμy11である。
ルール(2):もしPbがμv12ならば、Δはμy12である。
ルール(3):もしPbがμv13ならば、Δはμy13である。
【0080】
スイッチロジック250は、監視ルール4に決めるように、もし、心拍数120および血圧130が共に連続30分間高ければ、ファジィシステム230(FSIII)を作動させて、限外濾過速度の変化135を計算する。ファジィシステム230は、二つのファジィサブシステム230a、230b(FSIIIA、FAIIIB)を含む。限外濾過速度の変化135の方向が未定であるので、ユーザは、限外濾過速度を減らすべきか、増すべきかを訊かれる。ユーザは、この限外濾過速度を減らすためにはファジィサブシステム230aを手動で選択する。ファジィサブシステム230a用のファジィ・ルールベースは:
ルール(1):もしPbがμv31ならば、Δはμy21である。
ルール(2):もしPbがμv32ならば、Δはμy22である。
ルール(3):もしPbがμv33ならば、Δはμy23である。
ユーザは、この限外濾過速度を増すためにはファジィサブシステム230bを選択する。ファジィサブシステム230b用のファジィ・ルールベースは:
ルール(1):もしRhがμu31ならば、Δはμy13である。
ルール(2):もしRhがμu32ならば、Δはμy12である。
ルール(3):もしRhがμu33ならば、Δはμy11である。
【0081】
最後に、ファジィシステム230(FSIV)が患者の健康状態の改善の結果として限外濾過速度の増加量を計算する。スイッチロジック250は、もし、Rhが低く且つPbが高ければ、ファジィサブシステム240を作動させる。ファジィサブシステム240用のファジィ・ルールベースは:
ルール(1):もしPbがμv31ならば、Δはμy21である。
ルール(2):もしPbがμv32ならば、Δはμy22である。
ルール(3):もしPbがμv33ならば、Δはμy23である。
監視制御装置160は、監視ルール7によって規定するように、濾過率が常に20%以下であるように濾過率も調整する。
【0082】
もう一つの側面で、監視制御システム160は、測定した流量をこのポンプ型式に基づく予測誤差と比較することによってその認定もする。監視制御装置180は、流体通路の有意な漏れまたは配管の外れは正確に検出しながら、例えば、電子秤54、78への不用意な衝突の結果である、不正確な流体重量測定値は無視しなければならない。前者の場合、この監視制御装置160は、限外濾過処置を休止し、可聴または可視警報を出す。
【0083】
排液ポンプ66および注入液ポンプ60の予測誤差は、測定した累積流体重量とこのポンプ型式が予報する予測重量の差と定義する。追跡誤差は、予測流体重量と所望の流体重量の差と定義する。血液ポンプ16に対して、流体流量は、流量プローブ27によって測定し、予測誤差および追跡誤差は、流体流量に関して参照する。
【0084】
もし、与えられた最少数の連続サンプル周期に対して、予測誤差がポンプ型式の提供する正の定数より大きく且つ追跡誤差がやはりポンプ型式の提供する第2の正の定数より大きいならば、監視制御装置160は、監視活動を開始する。もし、予測誤差だけ、または追跡誤差だけが大きければ、この監視制御装置160によるパラメータ推定値は、まだ血液濾過システム10に合わせない。もし両方の誤差が大きく且つ同符号であれば、血液濾過システム10のポンプ16、60a、60b、66を停止する。もし予測誤差および追跡誤差が大きく且つ反対符号であれば、この監視制御装置160によるパラメータ推定値を平静な血液濾過システム10に僅かに合わせ、それで不正確な測定値か、血液濾過システム10の動的特性に突然の極端な変化が起りそうである。ポンプ動的特性の極端な変化は、配管漏れのような重大なシステム故障によってのみ起る。もし、ポンプ16、60a、60b、66の何れかに、所定数以上の連続サンプルに矛盾した重量または流量を検知したならば、監視制御装置160は、この血液濾過システム10を使用禁止にして可聴または可視警報を出す。
【0085】
上記の適応制御または監視制御のどちらか、または両方の実施は、血液濾過システムの自律性を増すことができる。自律性向上の結果として種々の利点が生ずる。例えば、連続モニタおよび制御が医療コストを下げ、医療スタッフによる限外濾過処置の断続的管理の必要性を減らすことによって医療の品質を改善する。この発明の更なる詳細は、以下の例で説明する。
【0086】
以下の例は、上に説明したような、適応制御および監視制御を有する限外濾過システムで行うシミュレートした限外濾過処置で、水道水か期限切れの血液を仮想患者とした。利用したポンプモデルは、実際の流体重量または流量に基づき、ポンプローラ角速度からではないので、制御性能は、流体のレオロジーと独立である。達成可能な流量の範囲は変るかも知れないが、これらのシミュレーションに使用する流体の種類は、流れ追跡の観点から無関係である。
【0087】
サンプリング周期n=1.75秒をこれらの例では使った。この特定のサンプル周期は、幾つかの初期実験後に、瞬間ポンプ流量は衝動的で平均流量にしか関心がないことを考慮して選択した。サンプル周期が小さ過ぎると、サンプル毎に流量に大きな変動を与え、急速に変動し過ぎる制御信号を生じる結果となり、非円滑運転を起すかも知れない。他方、数秒を超えるサンプリング時間は、応答が遅く、追跡誤差が大きい結果となるかも知れない。
【0088】
各例でシミュレーションの初めに、もし、その例で血液を使うなら、管路の中の気泡を除去するために、全ての配管部分に水または150mEq/Lの塩化ナトリウム溶液を注入した。排出液重量の測定ノイズ源は、排出液の蒸発で、それは、排液容器を封止することによって防げる。他の測定ノイズ源には、通風による補充液バッグのスイッチングがあり、それは重量測定に不確かさを取込む。バッグおよび秤を格納装置の内部に置くことは、この不確かさを最小にし、重量測定に於ける不確かさの唯一の発生源としてのこの秤の精度(±0.5g)の実際的使用を可能にする。流量測定は、使用する流体に対して製造業者が較正した、超音波流量プローブ(トランソニック・システムズ社)によって行う。この流量プローブの精度は、測定値の±7%であり、それは血液流量誤差源であるが限外濾過誤差源ではない。
【0089】
血液、排液、および補充ポンプのシミュレーション流量は、患者としての新生児に一般的に使うものと矛盾しないように選択してある。限外濾過は、もし小流量および小体外血液管路容積を使うなら、小さい患者に有益である。この血液管路用の配管およびコネクタの種類および大きさは、必要な流量の大きさに従って選択してある。これらの部品が各ポンプに対するARMA式パラメータを決め、それらは一般的に、これらの部品の物理特性が時間が経つと変動するので、いつかは変動するだろう。この例のシミュレーション目的での適応刻み幅γ0、最大電圧uh、および最小電圧u1の値を表2に示す。
【0090】
【表2】
【0091】
(例1)
“患者”として容器一杯の血液でシミュレートした限外濾過処置に対する追跡誤差、制御電圧および制御装置パラメータを、それぞれ、図7A、7B、および7Cに示す。追跡誤差は、電圧が定常である間に、30秒以内にゼロになる。限外濾過処置の初めの大きな負の血液ポンプ追跡誤差は、数秒間の遅い血液クリアランスは患者に悪影響しないので、許容する。大きな正の追跡誤差は、組織灌流が減少する結果となることがあり、患者は、この種々の組織に達する栄養の減少に逆に応答するかも知れず、しないかも知れない。従って、限外濾過処置の初めの過渡的に大きな負の誤差は、追跡オーバシュートの防止のため交換を許容する。
【0092】
(例2)
血液流量を40.0ml/minに設定し、排液流量を230.0ml/hに設定し、および両補充流量を100.0ml/hに設定して約1時間継続する限外濾過処置が新生児に行う限外濾過処置をシミュレートする。全ての流体の交換用に水を利用するシミュレーションの典型的流量および重量追跡誤差を図8A、8B、8Cおよび8Dに示す。このシミュレーションの初めの血液ポンプ追跡誤差は、図7A〜7Cに示すシミュレーションの初めと性質が違う。何故なら、製造業者が提供する流量計低域通過フィルタの選択が二つのシミュレーションでこの時限に対して同じでないからである。正確な継続時間が与えられたとすると、期待する限外濾過は、30.1mlであった。“患者”の初期体重(269.3±0.5g)と最終体重(241.0±0.5g)を比較することによって測定した限外濾過は、28.3±0.7gであり、それは所望の限外濾過と1.7±0.7mlの差となった。排液および補充液の初期および最終重量を比較することによって測定した期待限外濾過は、28.4±1.2mlであった。この期待限外濾過速度を排液および補充容器の初期重量、それぞれ、0.0±0.5g、345.2±0.5g、および341.3±0.5gと対応する最終重量、それぞれ、230.5±0.5g、243.4±0.5gおよび241.0±0.5gから[(230.5±0.5)−(0.0±0.5)]−[(345.2±0.5)−(243.4±0.5)]−[(341.3±0.5)−(241.0±0.5)]=28.4±1.2gと計算した。
【0093】
(例3)
図9A、9B、および9Cは、秤を2度衝突し、配管漏れが起るシミュレーションを示す。不適合な重量変化を決定するための閾値を表3で与える。
【0094】
【表3】
【0095】
大きさの大きい短い外乱をn=10で導入し(大きい重量を秤に載せ、それを除去することによる)、この監視制御装置が応答しない。n=60で、同様な、小さな外乱を短時間導入し、再び監視制御装置が応答しない。n=90で、同様に小さい外乱を長時間導入する。これは、配管の漏れをシミュレートし、実際の限外濾過処置中に漏れが起ったときに一般的に直面するものより遙かに小さい外乱である。制御装置は、この不適合な重量変化を検出し、この場合、限外濾過を中止することを決定する。
【0096】
(例4)
図10A、10B、および10Cは、新生児に行った限外濾過のシミュレーションのためのシミュレートした患者データおよび所望の排液流量を示す。この患者心拍数および血圧は、コンピュータソフトウェアで作った。血液流量は、40ml/minに設定し、補充液流量は、共に100ml/minに設定してある。心拍数の閾値は、90bpmおよび105bpmに選択し、血圧の閾値は、9.3kPaおよび12.7kPaに選択してある。このシミュレーションの初めに、RhおよびPbは、それらの正常範囲内にある。n=40付近で、Rhが閾値の上に上昇し、一方Pbは正常のままである。監視制御装置は、高心拍数のために補正を行い、応答を待つ。実際の限外濾過処置中、監視制御装置は、高心拍数のために何か他の措置を執る前に約10分間待つだろう。このシミュレーションのために、この待機を約30秒に縮める。このスイッチロジックは、患者の心拍数が高いままであるので、第1補正後に再びFSIAを30秒作動させる。この監視制御装置は、更に30秒待って、スイッチロジックがRhおよびPbを再チェックする。この時、心拍数は高く、血圧は低く、それでスイッチロジックがFSICを作動させる。このファジィサブシステムFISCは、約n=100で限外濾過速度を低減し、それでその後まもなくRhおよびPbが正常に戻り始める。監視制御装置がFSIの再起動が必要かどうかをチェックする前に、患者パラメータが正常に戻るので、それ以上の補正は行わない。
【0097】
(例5)
図11A、11Bおよび11Cは、心拍数および血圧が共に低く、ユーザが監視制御装置に訊かれたとき限外濾過の減少を指定した場合のシミュレーションを示す。血液流量は、40ml/minに設定し、補充液流量は共に100ml/minに設定してある。心拍数の最小および最大閾値は、90bpmおよび105bpmに選択し、血圧の最小および最大閾値は、9.3kPaおよび12.7kPaに選択してある。このシミュレーションの初めに、RhおよびPbは、それらの正常範囲内にある。n=80付近で、RhおよびPbがそれらそれぞれの下閾値の下に低下し、それでFSIIBが限外濾過速度の減少量を計算する。スイッチロジックFSIIBは、他の調節を行う前にFSIIを10秒(実際の限外濾過処置には5分)待たせる。患者パラメータがそれらそれぞれの正常範囲には決して戻らないので、監視制御装置は、限外濾過速度がゼロまで排液流量を減少させる。
【0098】
(例6)
図12A、12Bおよび12Cは、患者パラメータが共に高く、ユーザが限外濾過速度の増加を指定する場合のシミュレーションを示す。血液流量は、40ml/minに設定し、補充液流量は共に100ml/minに設定してある。心拍数の閾値は、90bpmおよび105bpmに選択し、血圧の閾値は、9.3kPaおよび12.7kPaに選択してある。このシミュレーションの初めに、RhおよびPbは、それらの正常範囲内にある。n=60付近で、患者心拍数および血圧の両方がそれらそれぞれの上閾値の上に上昇する。20秒(実際の限外濾過処置では30分)後、FSIIを作動させるための条件を満たし、それで限外濾過速度を増す。患者パラメータがそれらそれぞれの正常範囲には決して戻らないので、監視制御装置は、限外濾過速度が最初に与えた流量の上30%まで排液流量を上げる。この点で、この血液濾過装置は、ユーザに最大限外濾過速度が所望の濾過速度として設定してあるので警告を発する。
【0099】
(例7)
図13A、13Bおよび13Cは、患者が限外濾過速度を増すに十分良くなっている場合のシミュレーションを示す。血液流量は、40ml/minに設定し、補充液流量は共に100ml/minに設定してある。心拍数の閾値は、90bpmおよび105bpmに選択し、血圧の閾値は、9.3kPaおよび12.7kPaに選択してある。このシミュレーションの初めに、RhおよびPbは、それらの正常範囲内にある。一旦心拍数および血圧が好ましい領域内になると、監視制御装置は、120秒(実際の限外濾過処置では約60分)待って排液ポンプ流量を増す前に過渡的挙動を検出する。心拍数および血圧がそれらの正常範囲へ戻るので、それ以上の調節は行わない。
【0100】
(例8)
図14A、14Bおよび14Cは、監視制御装置が高濾過率のために限外濾過を調節する場合のシミュレーションを描く。患者パラメータは、共に長時間に亘って高く、排液流量を332.6ml/hから372.4ml/hへ増すことによって、初期限外濾過速度が、132.6ml/hから172.4ml/hへ増す。後者の流量は、もし血液ポンプ流量を40.0ml/hに維持するならば、22.2%の濾過率を達成するだろう。濾過率を20%まで下げるために、血液ポンプ流量を44.3ml/hに増さねばならない。
【0101】
上に説明した監視制御システムおよび適応制御システムは、限外濾過処置に使うために限定されず、心肺機械のように、流体を移動するためにポンプを使用する他の医療システムにも適用しうるものである。他の適当な医療用途は、当業者に明白だろう。
【0102】
当業者には、本発明のシステムおよび方法に前記の請求項によって定義する範囲から逸脱することなく種々の修正を施せることが分るだろう。
【特許請求の範囲】
【請求項1】
患者の血液から流体を除去するための血液ろ過システムであって、
注入液、排出液及び血液ろ過システム内の血液からなるグループから選択された液体を吸い上げる第1のポンプ、
前記第1のポンプが発生した前記血液ろ過システム内の流体の流量を測定すると共に上記流体の流量に相関する流量データ信号を提供する第1のセンサ、
前記血液ろ過システム内の前記第1のポンプに電気的に接続されて該第1のポンプへ出力信号を伝達することにより前記流体の流量を調整すると共に前記第1の流量センサに電気的に接続されて該第1のセンサから提供される流体の流量データ信号を受け取る監視制御装置、
少なくとも一つの患者パラメータを測定するためのモニタであって、上記少なくとも一つの患者パラメータに相関する患者パラメータデータ信号を提供する患者パラメータモニタ、
を含み、前記監視制御装置は前記患者パラメータモニタと電気的に接続して該患者パラメータモニタが提供する前記患者パラメータデータ信号を受け取り、
前記監視制御装置は流量データ信号及び患者パラメータデータ信号を受け取って、少なくとも一つの監視ルールを用いたファジィ論理と、該ファジィ論理のメンバーシップ関数であって所望の限外濾過速度に依存する幅を有する少なくとも一つのメンバーシップ関数を用いて流量データ信号と患者パラメータデータ信号を解析し、前記第1のポンプを調節するため出力信号を前記第1のポンプへ与えて、必要に応じて周期的に前記第1のポンプから発生された液体の流量を調節して、患者の血液から除去する流体を調整する、血液ろ過システム。
【請求項2】
請求項1の血液ろ過システムに於いて、上記少なくとも一つの患者パラメータモニタがさらに、血圧データ信号を与える血圧モニタを有する血液ろ過システム。
【請求項3】
請求項2の血液ろ過システムに於いて、上記医療システムが限外濾過システムであり、上記少なくとも一つの所定の監視ルールが、もし心拍数が高く且つ血圧が正常かまたは低ければ、限外濾過を減少し、第1所定時間待つ、というルールである、血液ろ過システム。
【請求項4】
請求項2の血液ろ過システムに於いて、前記医療システムは限外濾過システムであり、上記少なくとも一つの所定の監視ルールが、もし血圧が低く且つ心拍数が正常かまたは高ければ、限外濾過を減少し、第2所定時間待つ、というルールである、血液ろ過システム。
【請求項5】
請求項2の血液ろ過システムに於いて、前記医療システムは限外濾過システムであり、上記少なくとも一つの所定の監視ルールが、もし血圧が低く且つ心拍数が低ければ、ユーザに限外濾過速度の減少または増加の選択をさせ、第3所定時間待つ、というルールである、血液ろ過システム。
【請求項6】
請求項2の血液ろ過システムに於いて、前記医療システムは限外濾過システムであり、上記少なくとも一つの所定の監視ルールが、もし血圧が高く、心拍数が第4所定時間高ければ、ユーザに限外濾過速度の減少または増加の選択をさせる、というルールである、血液ろ過システム。
【請求項7】
請求項2の血液ろ過システムに於いて、前記医療システムは限外濾過システムであり、上記少なくとも一つの所定の監視ルールが、もし血圧が高く且つ心拍数が第5所定時間低ければ、限外濾過を増す、というルールである、血液ろ過システム。
【請求項8】
請求項2の血液ろ過システムに於いて、前記医療システムは限外濾過システムであり、上記少なくとも一つの所定の監視ルールが、限外濾過の最低可能値は、所定の時間当り最小流量であり、限外濾過速度の最高可能値は、所定の最高限外濾過速度のパーセントよりも所定パーセント高い、というルールである、血液ろ過システム。
【請求項9】
請求項2の血液ろ過システムに於いて、前記医療システムは限外濾過システムであり、上記少なくとも一つの所定の監視ルールが、もし限外濾過の増加が、濾過率が所定の濾過率より大きいように起るならば、上記濾過率が上記所定の濾過率に等しくなるように血液ポンプ流量を増す、というルールである、血液ろ過システム。
【請求項10】
請求項1ないし請求項9の何れかの血液ろ過システムに於いて、上記センサが流量計と重さ秤から成るグループから選択されてなる血液ろ過システム。
【請求項11】
請求項1の血液ろ過システムであって、更に、
第2ポンプと、
該第2ポンプが発生した流体の流量を測定するための第2センサであって、上記流体流量に相関する第2流量データ信号を提供する第2センサを含み、
上記監視制御装置が更に、
上記第2ポンプに電気的に接続され且つ上記第2流量センサに電気的に接続されており、上記第2流量データ信号を受け且つ少なくとも一つの監視ルールに基くファジィ論理を利用して上記信号を解析し、次に、上記第2ポンプが発生する流体の上記流量を、必要に応じて周期的且つ継続的に調節するために上記第2ポンプに出力信号を与える血液ろ過システム。
【請求項12】
請求項11の血液ろ過システムであって、更に、
第3ポンプと、
該第3ポンプが発生した血液ろ過システム内の流体の流量を測定するための第3センサであって、上記流体流量に相関する第3流量データ信号を提供する第3センサを含み、
上記監視制御装置が、更に、
上記第3ポンプに電気的に接続され且つ上記第3流量センサに電気的に接続されており、上記第3流量データ信号を受け且つ少なくとも一つの監視ルールに基くファジィ論理を利用して上記信号を解析し、次に、上記第3ポンプが発生する流体の上記流量を、必要に応じて周期的且つ継続的に、調節するために上記第3ポンプに出力信号を与える血液ろ過システム。
【請求項13】
請求項12の血液ろ過システムであって、更に、
第4ポンプと、
該第4ポンプが発生した血液ろ過システム内の流体の流量を測定するための第4センサであって、上記流体流量に相関する第4流量データ信号を提供する第4センサを含み、
上記監視制御装置が、更に、上記第4ポンプに電気的に接続され且つ上記第4流量センサに電気的に接続されており、上記第4流量データ信号を受け且つ少なくとも一つの監視ルールに基くファジィ論理を利用して上記信号を解析し、次に、上記第4ポンプが発生する流体の上記流量を、必要に応じて周期的且つ継続的に調節するために上記第4ポンプへ出力信号を与える血液ろ過システム。
【請求項14】
請求項1の血液ろ過システムであって、更に、上記第1のポンプに電気的に接続され且つ上記流量センサに電気的に接続された適応制御装置で、上記流量データ信号を受け、上記それぞれの流体の上記流量の所定の血液流量からの時間依存偏差を補正するための1組の制御装置パラメータを発生するために適応法則を使用し、および上記所定の血液流量を達成するために上記第1のポンプが発生した流体のポンプ流量を調節するために、上記1組の制御装置パラメータから出力信号を発生するために制御法則を使用し、次に上記出力信号を上記ポンプに周期的且つ継続的に与える適応制御装置を含む血液ろ過システム。
【請求項15】
患者の血液から流体を除去する血液ろ過システムを制御する方法であって、
第1のポンプを用いて血液ろ過システム内の、注入液、排出液、血液からなるグループから選択された流体を汲出す工程と、
監視制御装置により流体の流量を測定して、上記流体の流量に相関する流量データ信号を発生する工程と、
患者パラメータをセンサによって測定して、前記患者パラメータと相関する患者のデータ信号を発生する工程と、
前記監視制御装置によって患者パラメータデータ信号を測定して患者パラメータデータ信号を発生する工程と、
前記監視制御装置によって前記流量データ信号と患者パラメータデータ信号を、少なくとも一つの監視ルールを有するファジィ論理の推論エンジンを用いて分析する工程とを含み、該ファジィ論理の推論エンジンに用いられる少なくとも一つのメンバーシップ関数の幅が所望の限外濾過速度に依存し、
更に、前記流量データ信号と患者パラメータデータ信号の前記分析に応答して前記監視制御装置により周期的且つ継続的に流体流量を調節して、患者の血液からの液体の除去を調節する工程とを備える方法。
【請求項16】
請求項15の方法に於いて、上記血液ろ過システムが限外濾過システムであり、上記少なくとも一つの監視ルールが、もし心拍数が高く且つ血圧が正常かまたは低ければ、限外濾過を減少し、第1所定時間待つ、というルールである、方法。
【請求項17】
請求項15の方法に於いて、前記血液ろ過システムは限外濾過システムであり、上記少なくとも一つの監視ルールが、もし血圧が低く且つ心拍数が正常かまたは高ければ、限外濾過を減少し、第2所定時間待つ、というルールである、方法。
【請求項18】
請求項15の方法に於いて、前記血液ろ過システムは限外濾過システムであり、上記少なくとも一つの監視ルールが、もし血圧が低く且つ心拍数が低ければ、ユーザに限外濾過速度の減少または増加の選択をさせ、第3所定時間待つ、というルールである、方法。
【請求項19】
請求項15の方法に於いて、前記血液ろ過システムは限外濾過システムであり、上記少なくとも一つの監視ルールが、もし血圧が高く、心拍数が第4所定時間高ければ、ユーザに限外濾過速度の減少または増加の選択をさせる、というルールである、方法。
【請求項20】
請求項15の方法に於いて、前記血液ろ過システムは限外濾過システムであり、上記少なくとも一つの監視ルールが、もし血圧が高く且つ心拍数が第5所定時間低ければ、限外濾過を増す、というルールである、方法。
【請求項21】
請求項15の方法に於いて、前記血液ろ過システムは限外濾過システムであり、上記少なくとも一つの監視ルールが、限外濾過の最低可能値は、所定の時間当り最小流量であり、限外濾過速度の最高可能値は、所定の最高限外濾過速度のパーセントよりも所定パーセント高い、というルールである、方法。
【請求項22】
請求項15の方法に於いて、前記血液ろ過システムは限外濾過システムであり、上記少なくとも一つの監視ルールが、もし限外濾過の増加が、濾過率が所定の濾過率より大きいように起るならば、上記濾過率が上記所定の濾過率に等しくなるように血液ポンプ流量を増す、というルールである、方法。
【請求項23】
請求項15の方法に於いて、前記監視制御装置は第2のセンサ及び第2のポンプと電気的に接続されており、該方法は更に、
前記第2のセンサを有する前記第2のポンプによって発生された流体の流量を測定して該流体の流量に相関する第2の流量データ信号を提供する工程と、
前記第2のセンサからの第2の流量データ信号及び患者のパラメータ信号の分析に応答して前記監視制御装置によって前記第2のポンプの速度を制御して患者の血液からの液体の除去を調整する工程を備える、方法。
【請求項24】
請求項23の方法に於いて、前記監視制御装置は第3のセンサ及び第3のポンプと電気的に接続されており、該方法は更に、
前記第3のセンサを有する前記第3のポンプによって発生された流体の流量を測定して該流体の流量に相関する第3の流量データ信号を提供する工程と、
前記第3のセンサからの第3の流量データ信号及び患者のパラメータ信号の分析に応答して前記監視制御装置によって前記第3のポンプの速度を制御して患者の血液からの液体の除去を調整する工程を備える、方法。
【請求項25】
請求項24の方法に於いて、前記監視制御装置は第4のセンサ及び第4のポンプと電気的に接続されており、該方法は更に、
前記第4のセンサを有する前記第4のポンプによって発生された流体の流量を測定して該流体の流量に相関する第4の流量データ信号を提供する工程と、
前記第4のセンサからの第4の流量データ信号及び患者のパラメータ信号の分析に応答して前記監視制御装置によって前記第4のポンプの速度を制御して患者の血液からの液体の除去を調整する工程を備える、方法。
【請求項26】
請求項15の方法に於いて、前記血液ろ過システムは更に適応制御を備えており、該適応制御装置は前記センサ、前記第1のポンプ及び前記監視制御装置に電気的に接続されており、該方法は更に、
上記流量データ信号を受ける工程と、
それぞれの流体の上記流量の所定の血液流量からの時間依存偏差を補正するための1組の制御装置パラメータを発生するために適応法則を使用する工程と、
上記所定の血液流量を達成するために上記ポンプが発生した流体のポンプ流量を調節するために、上記1組の制御装置パラメータから出力信号を発生するために制御法則を使用する工程と、
上記出力信号を上記ポンプに周期的に与える工程を含み、
上記各工程は前記適応制御装置により行われる、方法。
【請求項1】
患者の血液から流体を除去するための血液ろ過システムであって、
注入液、排出液及び血液ろ過システム内の血液からなるグループから選択された液体を吸い上げる第1のポンプ、
前記第1のポンプが発生した前記血液ろ過システム内の流体の流量を測定すると共に上記流体の流量に相関する流量データ信号を提供する第1のセンサ、
前記血液ろ過システム内の前記第1のポンプに電気的に接続されて該第1のポンプへ出力信号を伝達することにより前記流体の流量を調整すると共に前記第1の流量センサに電気的に接続されて該第1のセンサから提供される流体の流量データ信号を受け取る監視制御装置、
少なくとも一つの患者パラメータを測定するためのモニタであって、上記少なくとも一つの患者パラメータに相関する患者パラメータデータ信号を提供する患者パラメータモニタ、
を含み、前記監視制御装置は前記患者パラメータモニタと電気的に接続して該患者パラメータモニタが提供する前記患者パラメータデータ信号を受け取り、
前記監視制御装置は流量データ信号及び患者パラメータデータ信号を受け取って、少なくとも一つの監視ルールを用いたファジィ論理と、該ファジィ論理のメンバーシップ関数であって所望の限外濾過速度に依存する幅を有する少なくとも一つのメンバーシップ関数を用いて流量データ信号と患者パラメータデータ信号を解析し、前記第1のポンプを調節するため出力信号を前記第1のポンプへ与えて、必要に応じて周期的に前記第1のポンプから発生された液体の流量を調節して、患者の血液から除去する流体を調整する、血液ろ過システム。
【請求項2】
請求項1の血液ろ過システムに於いて、上記少なくとも一つの患者パラメータモニタがさらに、血圧データ信号を与える血圧モニタを有する血液ろ過システム。
【請求項3】
請求項2の血液ろ過システムに於いて、上記医療システムが限外濾過システムであり、上記少なくとも一つの所定の監視ルールが、もし心拍数が高く且つ血圧が正常かまたは低ければ、限外濾過を減少し、第1所定時間待つ、というルールである、血液ろ過システム。
【請求項4】
請求項2の血液ろ過システムに於いて、前記医療システムは限外濾過システムであり、上記少なくとも一つの所定の監視ルールが、もし血圧が低く且つ心拍数が正常かまたは高ければ、限外濾過を減少し、第2所定時間待つ、というルールである、血液ろ過システム。
【請求項5】
請求項2の血液ろ過システムに於いて、前記医療システムは限外濾過システムであり、上記少なくとも一つの所定の監視ルールが、もし血圧が低く且つ心拍数が低ければ、ユーザに限外濾過速度の減少または増加の選択をさせ、第3所定時間待つ、というルールである、血液ろ過システム。
【請求項6】
請求項2の血液ろ過システムに於いて、前記医療システムは限外濾過システムであり、上記少なくとも一つの所定の監視ルールが、もし血圧が高く、心拍数が第4所定時間高ければ、ユーザに限外濾過速度の減少または増加の選択をさせる、というルールである、血液ろ過システム。
【請求項7】
請求項2の血液ろ過システムに於いて、前記医療システムは限外濾過システムであり、上記少なくとも一つの所定の監視ルールが、もし血圧が高く且つ心拍数が第5所定時間低ければ、限外濾過を増す、というルールである、血液ろ過システム。
【請求項8】
請求項2の血液ろ過システムに於いて、前記医療システムは限外濾過システムであり、上記少なくとも一つの所定の監視ルールが、限外濾過の最低可能値は、所定の時間当り最小流量であり、限外濾過速度の最高可能値は、所定の最高限外濾過速度のパーセントよりも所定パーセント高い、というルールである、血液ろ過システム。
【請求項9】
請求項2の血液ろ過システムに於いて、前記医療システムは限外濾過システムであり、上記少なくとも一つの所定の監視ルールが、もし限外濾過の増加が、濾過率が所定の濾過率より大きいように起るならば、上記濾過率が上記所定の濾過率に等しくなるように血液ポンプ流量を増す、というルールである、血液ろ過システム。
【請求項10】
請求項1ないし請求項9の何れかの血液ろ過システムに於いて、上記センサが流量計と重さ秤から成るグループから選択されてなる血液ろ過システム。
【請求項11】
請求項1の血液ろ過システムであって、更に、
第2ポンプと、
該第2ポンプが発生した流体の流量を測定するための第2センサであって、上記流体流量に相関する第2流量データ信号を提供する第2センサを含み、
上記監視制御装置が更に、
上記第2ポンプに電気的に接続され且つ上記第2流量センサに電気的に接続されており、上記第2流量データ信号を受け且つ少なくとも一つの監視ルールに基くファジィ論理を利用して上記信号を解析し、次に、上記第2ポンプが発生する流体の上記流量を、必要に応じて周期的且つ継続的に調節するために上記第2ポンプに出力信号を与える血液ろ過システム。
【請求項12】
請求項11の血液ろ過システムであって、更に、
第3ポンプと、
該第3ポンプが発生した血液ろ過システム内の流体の流量を測定するための第3センサであって、上記流体流量に相関する第3流量データ信号を提供する第3センサを含み、
上記監視制御装置が、更に、
上記第3ポンプに電気的に接続され且つ上記第3流量センサに電気的に接続されており、上記第3流量データ信号を受け且つ少なくとも一つの監視ルールに基くファジィ論理を利用して上記信号を解析し、次に、上記第3ポンプが発生する流体の上記流量を、必要に応じて周期的且つ継続的に、調節するために上記第3ポンプに出力信号を与える血液ろ過システム。
【請求項13】
請求項12の血液ろ過システムであって、更に、
第4ポンプと、
該第4ポンプが発生した血液ろ過システム内の流体の流量を測定するための第4センサであって、上記流体流量に相関する第4流量データ信号を提供する第4センサを含み、
上記監視制御装置が、更に、上記第4ポンプに電気的に接続され且つ上記第4流量センサに電気的に接続されており、上記第4流量データ信号を受け且つ少なくとも一つの監視ルールに基くファジィ論理を利用して上記信号を解析し、次に、上記第4ポンプが発生する流体の上記流量を、必要に応じて周期的且つ継続的に調節するために上記第4ポンプへ出力信号を与える血液ろ過システム。
【請求項14】
請求項1の血液ろ過システムであって、更に、上記第1のポンプに電気的に接続され且つ上記流量センサに電気的に接続された適応制御装置で、上記流量データ信号を受け、上記それぞれの流体の上記流量の所定の血液流量からの時間依存偏差を補正するための1組の制御装置パラメータを発生するために適応法則を使用し、および上記所定の血液流量を達成するために上記第1のポンプが発生した流体のポンプ流量を調節するために、上記1組の制御装置パラメータから出力信号を発生するために制御法則を使用し、次に上記出力信号を上記ポンプに周期的且つ継続的に与える適応制御装置を含む血液ろ過システム。
【請求項15】
患者の血液から流体を除去する血液ろ過システムを制御する方法であって、
第1のポンプを用いて血液ろ過システム内の、注入液、排出液、血液からなるグループから選択された流体を汲出す工程と、
監視制御装置により流体の流量を測定して、上記流体の流量に相関する流量データ信号を発生する工程と、
患者パラメータをセンサによって測定して、前記患者パラメータと相関する患者のデータ信号を発生する工程と、
前記監視制御装置によって患者パラメータデータ信号を測定して患者パラメータデータ信号を発生する工程と、
前記監視制御装置によって前記流量データ信号と患者パラメータデータ信号を、少なくとも一つの監視ルールを有するファジィ論理の推論エンジンを用いて分析する工程とを含み、該ファジィ論理の推論エンジンに用いられる少なくとも一つのメンバーシップ関数の幅が所望の限外濾過速度に依存し、
更に、前記流量データ信号と患者パラメータデータ信号の前記分析に応答して前記監視制御装置により周期的且つ継続的に流体流量を調節して、患者の血液からの液体の除去を調節する工程とを備える方法。
【請求項16】
請求項15の方法に於いて、上記血液ろ過システムが限外濾過システムであり、上記少なくとも一つの監視ルールが、もし心拍数が高く且つ血圧が正常かまたは低ければ、限外濾過を減少し、第1所定時間待つ、というルールである、方法。
【請求項17】
請求項15の方法に於いて、前記血液ろ過システムは限外濾過システムであり、上記少なくとも一つの監視ルールが、もし血圧が低く且つ心拍数が正常かまたは高ければ、限外濾過を減少し、第2所定時間待つ、というルールである、方法。
【請求項18】
請求項15の方法に於いて、前記血液ろ過システムは限外濾過システムであり、上記少なくとも一つの監視ルールが、もし血圧が低く且つ心拍数が低ければ、ユーザに限外濾過速度の減少または増加の選択をさせ、第3所定時間待つ、というルールである、方法。
【請求項19】
請求項15の方法に於いて、前記血液ろ過システムは限外濾過システムであり、上記少なくとも一つの監視ルールが、もし血圧が高く、心拍数が第4所定時間高ければ、ユーザに限外濾過速度の減少または増加の選択をさせる、というルールである、方法。
【請求項20】
請求項15の方法に於いて、前記血液ろ過システムは限外濾過システムであり、上記少なくとも一つの監視ルールが、もし血圧が高く且つ心拍数が第5所定時間低ければ、限外濾過を増す、というルールである、方法。
【請求項21】
請求項15の方法に於いて、前記血液ろ過システムは限外濾過システムであり、上記少なくとも一つの監視ルールが、限外濾過の最低可能値は、所定の時間当り最小流量であり、限外濾過速度の最高可能値は、所定の最高限外濾過速度のパーセントよりも所定パーセント高い、というルールである、方法。
【請求項22】
請求項15の方法に於いて、前記血液ろ過システムは限外濾過システムであり、上記少なくとも一つの監視ルールが、もし限外濾過の増加が、濾過率が所定の濾過率より大きいように起るならば、上記濾過率が上記所定の濾過率に等しくなるように血液ポンプ流量を増す、というルールである、方法。
【請求項23】
請求項15の方法に於いて、前記監視制御装置は第2のセンサ及び第2のポンプと電気的に接続されており、該方法は更に、
前記第2のセンサを有する前記第2のポンプによって発生された流体の流量を測定して該流体の流量に相関する第2の流量データ信号を提供する工程と、
前記第2のセンサからの第2の流量データ信号及び患者のパラメータ信号の分析に応答して前記監視制御装置によって前記第2のポンプの速度を制御して患者の血液からの液体の除去を調整する工程を備える、方法。
【請求項24】
請求項23の方法に於いて、前記監視制御装置は第3のセンサ及び第3のポンプと電気的に接続されており、該方法は更に、
前記第3のセンサを有する前記第3のポンプによって発生された流体の流量を測定して該流体の流量に相関する第3の流量データ信号を提供する工程と、
前記第3のセンサからの第3の流量データ信号及び患者のパラメータ信号の分析に応答して前記監視制御装置によって前記第3のポンプの速度を制御して患者の血液からの液体の除去を調整する工程を備える、方法。
【請求項25】
請求項24の方法に於いて、前記監視制御装置は第4のセンサ及び第4のポンプと電気的に接続されており、該方法は更に、
前記第4のセンサを有する前記第4のポンプによって発生された流体の流量を測定して該流体の流量に相関する第4の流量データ信号を提供する工程と、
前記第4のセンサからの第4の流量データ信号及び患者のパラメータ信号の分析に応答して前記監視制御装置によって前記第4のポンプの速度を制御して患者の血液からの液体の除去を調整する工程を備える、方法。
【請求項26】
請求項15の方法に於いて、前記血液ろ過システムは更に適応制御を備えており、該適応制御装置は前記センサ、前記第1のポンプ及び前記監視制御装置に電気的に接続されており、該方法は更に、
上記流量データ信号を受ける工程と、
それぞれの流体の上記流量の所定の血液流量からの時間依存偏差を補正するための1組の制御装置パラメータを発生するために適応法則を使用する工程と、
上記所定の血液流量を達成するために上記ポンプが発生した流体のポンプ流量を調節するために、上記1組の制御装置パラメータから出力信号を発生するために制御法則を使用する工程と、
上記出力信号を上記ポンプに周期的に与える工程を含み、
上記各工程は前記適応制御装置により行われる、方法。
【図1】

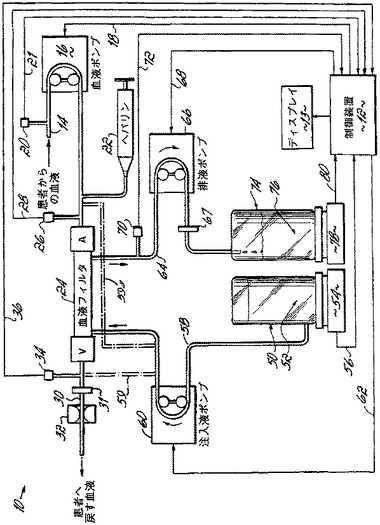
【図2】

【図3】
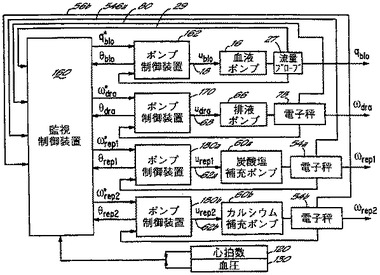
【図4】

【図5】
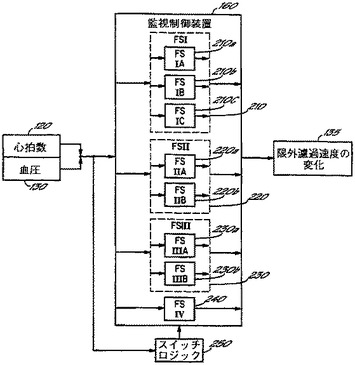
【図6A】

【図6B】
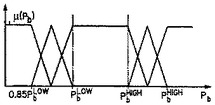
【図6C】
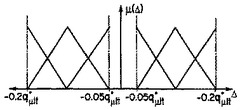
【図7A】
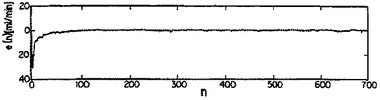
【図7B】

【図7C】
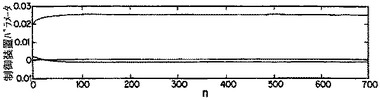
【図8A】
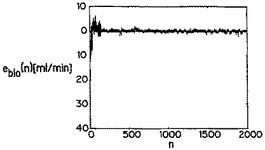
【図8B】

【図8C】
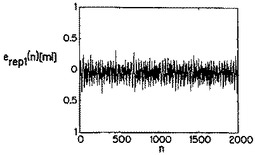
【図8D】
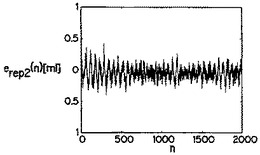
【図9A】

【図9B】
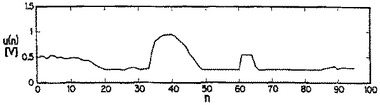
【図9C】
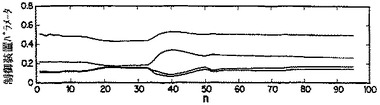
【図10A】

【図10B】

【図10C】
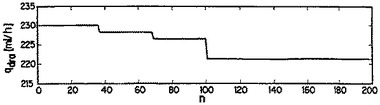
【図11A】
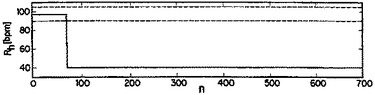
【図11B】
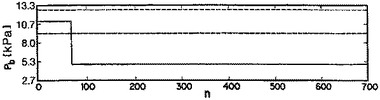
【図11C】
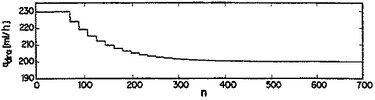
【図12A】
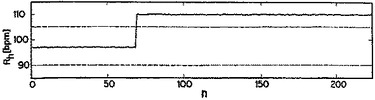
【図12B】

【図12C】
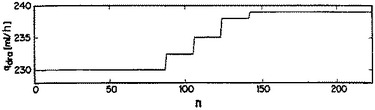
【図13A】
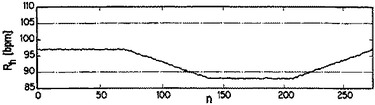
【図13B】
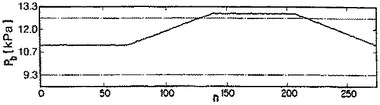
【図13C】
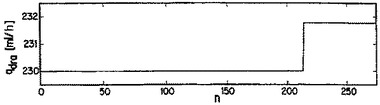
【図14A】

【図14B】

【図14C】
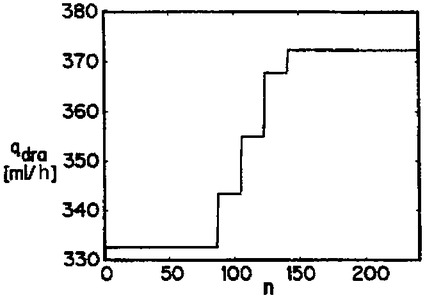
【図14D】
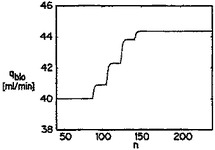
【図2】
【図3】
【図4】
【図5】
【図6A】
【図6B】
【図6C】
【図7A】
【図7B】
【図7C】
【図8A】
【図8B】
【図8C】
【図8D】
【図9A】
【図9B】
【図9C】
【図10A】
【図10B】
【図10C】
【図11A】
【図11B】
【図11C】
【図12A】
【図12B】
【図12C】
【図13A】
【図13B】
【図13C】
【図14A】
【図14B】
【図14C】
【図14D】
【公開番号】特開2011−147803(P2011−147803A)
【公開日】平成23年8月4日(2011.8.4)
【国際特許分類】
【出願番号】特願2011−69891(P2011−69891)
【出願日】平成23年3月28日(2011.3.28)
【分割の表示】特願2000−615080(P2000−615080)の分割
【原出願日】平成12年4月28日(2000.4.28)
【出願人】(500469235)チルドレンズ ホスピタル メディカル センター (40)
【Fターム(参考)】
【公開日】平成23年8月4日(2011.8.4)
【国際特許分類】
【出願日】平成23年3月28日(2011.3.28)
【分割の表示】特願2000−615080(P2000−615080)の分割
【原出願日】平成12年4月28日(2000.4.28)
【出願人】(500469235)チルドレンズ ホスピタル メディカル センター (40)
【Fターム(参考)】
[ Back to top ]