
血球計数装置および血球計数方法
【課題】全血検体を吸引する前に、蓋の内側に付着した全血検体を円滑に除去可能な血球計数装置および血球計数方法を提供する。
【解決手段】血球計数装置は、検体容器Tを把持して検体を攪拌するハンド部と、検体容器Tのキャップに貫通されるピアサと、ハンド部とピアサとの間の搬送路に配置されたバーコードユニットとを有する。バーコードユニットのローラB21には、中心方向に凹んだ切欠きB21aが形成されている。CPUは、検体容器Tに付されたバーコードラベルを読み取った後、バーコードユニットのローラB21を高速回転させる。切欠きB21aが検体容器Tの側面に到達すると、検体容器Tが切欠きB21aの方向に素早く変位し、キャップの内側に付着した検体に力が加わる。これにより、キャップから検体が除去される。
【解決手段】血球計数装置は、検体容器Tを把持して検体を攪拌するハンド部と、検体容器Tのキャップに貫通されるピアサと、ハンド部とピアサとの間の搬送路に配置されたバーコードユニットとを有する。バーコードユニットのローラB21には、中心方向に凹んだ切欠きB21aが形成されている。CPUは、検体容器Tに付されたバーコードラベルを読み取った後、バーコードユニットのローラB21を高速回転させる。切欠きB21aが検体容器Tの側面に到達すると、検体容器Tが切欠きB21aの方向に素早く変位し、キャップの内側に付着した検体に力が加わる。これにより、キャップから検体が除去される。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、全血検体に含まれる血球を計数する血球計数装置および血球計数方法に関する。
【背景技術】
【0002】
従来、全血検体を収容した検体容器を密封する蓋(キャップ)に吸引管を貫通させて、検体容器から全血検体を吸引し、吸引した全血検体に含まれる血球を計数する血球計数装置が知られている。全血検体に含まれる血球成分は、放置しておくと沈降するため、全血検体を吸引する前に、検体容器内の全血検体の濃度を均一にするために検体容器の攪拌が必要となる。この場合、検体容器の攪拌は、ユーザが手作業により行い、あるいは、血球計数装置内に配された攪拌のための機構により、血球計数装置において行われる。
【0003】
特許文献1には、全血検体を収容した検体容器を攪拌する機構を備えた装置が開示されている。この装置は、水平に設けられたシャフトと、シャフトの周方向に回転可能に設けられた回転ヘッドと、回転ヘッドの先端に設けられ、検体容器を両側から把持するピックアップ機構と、を備えている。装置は、直立状態の検体容器の中腹部分をピックアップ機構によって把持し、シャフトに対して周方向に回転ヘッドを360度回転させることにより、把持部分を支点に検体容器を1回転させ、検体容器内部の全血検体を攪拌する。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2002−71699号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、上記のような方法によって全血検体を攪拌すると、検体容器の蓋の内側に全血検体の一部が残留することがある。この状態で蓋に吸引管を貫通させると、蓋の内側に付着した全血検体が外側に噴き出してしまうおそれがあった。
【0006】
本発明は、かかる課題に鑑みてなされたものであり、全血検体を吸引する前に、蓋の内側に付着した全血検体を円滑に除去可能な血球計数装置および血球計数方法を提供することを目的とする。
【課題を解決するための手段】
【0007】
本発明の第1の態様は、蓋により密封された検体容器内から全血検体を吸引し、全血検体に含まれる血球を計数する血球計数装置に関する。本態様に係る血球計数装置は、前記検体容器を動かして前記検体容器内の全血検体を攪拌する検体攪拌部と、前記検体攪拌部による攪拌後に前記検体容器の前記蓋に吸引管を貫通させて前記検体容器内の全血検体を吸引する検体吸引部と、前記検体吸引部によって吸引された全血検体に含まれる血球を計数する検出部と、前記検体攪拌部による攪拌後に、前記検体容器を立たせた状態で、前記蓋の内側に付着した全血検体が前記蓋から離反するように、前記検体容器に力を付与する力付与手段と、を有する。
【0008】
本態様に係る血球計数装置によれば、全血検体の攪拌動作によって蓋の内側に全血検体が付着したとしても、全血検体が吸引される前に、力付与手段によって蓋の内側に付着した全血検体が除去されるため、吸引の際に吸引管を蓋に貫通させても、貫通個所から蓋の上部に全血検体が漏れ出すことがない。
【0009】
本態様に係る血球計数装置において、前記力付与手段は、前記検体容器に力を付与することにより前記検体容器を移動させて、前記蓋の内側に付着した全血検体に前記蓋から離反する力を付与するよう構成され得る。この構成によれば、検体容器の移動により、蓋の内側に付着した全血検体に、蓋から離反する力を付与される。
【0010】
この場合、前記力付与手段は、前記検体容器に力を付与することにより、前記検体容器の長手方向に交差する方向に前記検体容器を移動させるよう構成され得る。
【0011】
さらに、この場合、血球計数装置は、少なくとも前記頭部が揺れる状態で前記検体容器を立たせた状態で支持する検体容器支持部をさらに備え、前記力付与手段は、前記検体容器支持部に前記検体容器が支持された状態において、前記検体容器に前記検体容器の長手方向に交差する方向の力を付与するよう構成され得る。この構成によれば、力付与手段によって力が付与されることにより、検体容器が頭部を振るように移動するため、蓋の内側に付着した全血検体に対して、蓋から離反する力が付与される。これにより、蓋の内側に付着した全血検体を円滑に蓋から離反させることができる。
【0012】
この場合、前記力付与手段は、前記検体容器の外周面に接触して前記検体容器の長手方向に平行な軸の周りに前記検体容器を回転させるローラと、前記検体容器を回転可能な状態で前記検体容器を前記ローラに押し付ける付勢部を含み、前記ローラの外周は、前記ローラの回転軸からの距離が不安定となるように形成され得る。このとき、前記力付与手段は、前記ローラを前記検体容器の外周面に接触させた状態で、前記ローラを少なくとも一回転させる。
【0013】
こうすると、ローラの回転により、検体容器が、検体容器の長手方向に交差する方向に振動し、且つ、ローラの回転に伴って検体容器の長手方向に平行な軸の周りに検体容器が回転する。このため、振動による慣性力と回転による遠心力が、蓋の内側に付着した全血検体に付与されるため、蓋の内側から全血検体をさらに円滑に除去することができる。
【0014】
この場合、前記ローラは、前記ローラの外周面に設けられ、前記ローラの回転軸からの距離が段状に変化する段差を含み、当該段差を前記検体容器が通過する際に、前記検体容器の長手方向に交差する方向に、前記検体容器が移動するよう構成され得る。こうすると、段差が検体容器に到来したときに、検体容器を急激に移動させることができ、全血検体を円滑に除去することができる。
【0015】
ここで、血球計数装置が、前記検体容器の長手方向に平行な軸の周りに前記検体容器を回転させながら前記検体容器に付されたバーコードを読み取るバーコードリーダを備える場合、当該バーコードリーダの前記検体容器を回転させるためのローラを前記力付与手段のローラとして共用することができる。こうすると、全血検体除去のためのローラを、別途、設ける必要がないため、力付与手段の構成を簡素化することができる。
【0016】
なお、この構成において、前記バーコードリーダは、前記ローラの外周面を前記検体容器の外周面に当接させて前記検体容器を第1速度で回転させつつ前記バーコードを読み取る第1工程と、前記第1速度よりも高速で前記検体容器を回転させて前記蓋の内側に付着した全血検体を除去する第2工程を含む。こうすると、バーコードの読み取りを適正に行いながら、全血検体の除去を円滑に行うことができる。
【0017】
上記構成では、前記検体容器支持部に前記検体容器が当接することにより、前記検体容器の移動が規制されるよう構成するのが望ましい。あるいは、前記ローラの外周面に前記検体容器が当接することにより、前記検体容器の移動が規制されるよう構成するのが望ま
しい。こうすると、所定の速度で移動する検体容器の移動が急激に停止されるため、当該停止時に、蓋の内側に付着した全血検体に大きな力を付与することができる。これにより、全血検体を効果的に除去することができる。
【0018】
本態様に係る血球計数装置は、前記検体攪拌部によって全血検体が攪拌された検体容器を直立状態で保持して前記検体吸引部における吸引位置に搬送する搬送部をさらに備え得る。この場合、前記力付与手段は、前記搬送部における前記検体容器の搬送路上の所定の位置において、前記検体容器に力を付与する構成とされ得る。
【0019】
また、本態様に係る血球計数装置は、検体容器について特定の蓋を検出する蓋検出部をさらに備え、前記力付与手段は、前記蓋検出部により前記特定の蓋が検出された検体容器に対して検体除去のための作用を付与し、前記蓋検出部により前記特定の蓋が検出されなかった検体容器に対しては検体除去のための作用の付与を中止するよう構成され得る。こうすると、検体除去を行う必要のない検体容器に対して無駄に検体除去作用が付与されるのを回避することができる。
【0020】
なお、この構成において、蓋が装着されておらず、検体容器の上部が開放された検体容器も、「前記特定の蓋が検出された検体容器」として検出されない。すなわち、この構成では、蓋が装着されていない検体容器にも検体除去作用が付与されないため、蓋が装着されていない検体容器に力が付与されることにより、検体容器の上部から全血検体が飛び出すことを回避することができる。
【0021】
この場合、前記蓋検出部は、検体容器に付された蓋の色を検出するカラーセンサを含み、前記カラーセンサにより検出された色が前記特定の蓋の色に対応するかに基づいて、検体容器の蓋が特定の蓋であることを検出するよう構成され得る。
【0022】
なお、本態様に係る血球計数装置は、前記検体容器内の圧力を前記検体容器外部の圧力と等しくするための溝が、前記吸引管の外周面に、前記吸引管の長手方向に沿って形成されている場合に、特に顕著な効果を奏し得るものである。すなわち、吸引管にこのような溝が形成されていると、吸引管を蓋に貫通させたときに、蓋の内側に付着した全血検体が溝から外部に漏れ出すことが起こり易い。本態様に係る血球計数装置によれば、蓋の内側に付着した全血検体が除去されるため、吸引管を蓋に貫通させても、溝から全血検体が外部に漏れ出すことを防止できる。
【0023】
本発明の第2の態様は、蓋により密封され内部の全血検体が攪拌された検体容器内から全血検体を吸引し、吸引された全血検体に含まれる血球を計数する血球計数装置に関する。本態様に係る血球計数装置は、前記検体容器の前記蓋に吸引管を貫通させて前記検体容器内の全血検体を吸引する検体吸引部と、前記検体吸引部によって吸引された全血検体に含まれる血球を係数する検出部と、前記検体吸引部による吸引前に、前記検体容器を立たせた状態で、前記蓋の内側に付着した全血検体が前記蓋から離反するように、前記検体容器に力を付与する力付与手段とを有する。
【0024】
本態様に係る血球計数装置によれば、全血検体の攪拌時に蓋の内側に全血検体が付着したとしても、全血検体が吸引される前に、蓋の内側から全血検体を除去することができるため、吸引の際に吸引管を蓋に貫通させても、貫通個所から蓋の上部に全血検体が漏れ出すことがない。
【0025】
本発明の第3の態様は、蓋により密封され内部の全血検体が攪拌された検体容器内から全血検体を吸引し、吸引された全血検体に含まれる血球を計数する血球計数装置に関する。本態様に掛かる血球計数装置は、前記検体容器の前記蓋に吸引管を貫通させて前記検体
容器内の全血検体を吸引する検体吸引部と、前記検体吸引部によって吸引された全血検体に含まれる血球を計数する検出部と、を備え、前記検体吸引部による吸引前に、前記検体容器に衝撃を加えることにより、前記蓋の内側に付着した全血検体が前記蓋から離反させる。
【0026】
本態様に係る血球計数装置によれば、全血検体の攪拌時に蓋の内側に全血検体が付着したとしても、全血検体が吸引される前に、検体容器に衝撃が加えられることにより、蓋の内側から全血検体が除去されるため、吸引の際に吸引管を蓋に貫通させても、貫通個所から蓋の上部に全血検体が漏れ出すことがない。
【0027】
本発明の第4の態様は、蓋により密封された検体容器内から全血検体を吸引し、吸引された全血検体に含まれる血球を計数する血球計数方法に関する。本態様に係る血球計数方法は、前記検体容器を動かして前記検体容器内の全血検体を攪拌する攪拌工程と、前記検体容器を立たせた状態で、前記蓋の内側に付着した全血検体が前記蓋から離反するように、前記検体容器に力を付与する力付与工程と、前記検体容器の前記蓋に吸引管を貫通させて前記検体容器内の全血検体を吸引する吸引工程と、前記吸引工程において吸引された全血検体に含まれる血球を計数する検出工程と、を有する。
【0028】
本態様によれば、上記第1の態様と同様の効果が奏され得る。
【発明の効果】
【0029】
以上のとおり、本発明によれば、全血検体を吸引する前に、蓋の内側に付着した全血検体を円滑に除去可能な血球計数装置および血球計数方法を提供することができる。
【0030】
本発明の効果ないし意義は、以下に示す実施の形態の説明により更に明らかとなろう。ただし、以下に示す実施の形態は、あくまでも、本発明を実施化する際の一つの例示であって、本発明は、以下の実施の形態により何ら制限されるものではない。
【図面の簡単な説明】
【0031】
【図1】実施の形態に係る血球計数装置の外観を示す斜視図である。
【図2】実施の形態に係る検体容器、検体容器を密封するキャップおよび検体ラックの構成を示す図である。
【図3】実施の形態に係る搬送ユニットおよび測定ユニットを上側から見た場合の構成を示す平面図および検体容器ホルダの構成を模式的に示す図である。
【図4】実施の形態に係る検体容器の攪拌動作、検体容器ホルダに対する検体容器のセット動作および特定キャップの検出動作を模式的に示す図である。
【図5】実施の形態に係る把持ユニットの構成を示す図である。
【図6】実施の形態に係るバーコードユニットの構成を示す図である。
【図7】実施の形態に係るバーコードユニットの動作を示す図である。
【図8】実施の形態に係るピアサの構成を示す図である。
【図9】実施の形態に係る搬送ユニットおよび測定ユニットの構成を示す図である。
【図10】実施の形態に係る情報処理ユニットの構成を示す図である。
【図11】実施の形態に係る測定ユニットの動作を示すフローチャートである。
【図12】変更例に係る血球計数装置の外観を示す斜視図である。
【図13】変更例に係る測定ユニットの動作を示すフローチャートである。
【図14】変更例に係る測定ユニットの動作を示すフローチャートである。
【図15】変更例に係るローラの構成を示す図である。
【図16】変更例に係るローラの構成を示す図である。
【発明を実施するための形態】
【0032】
本実施の形態は、全血検体に含まれる血球を計数する血球計数装置に本発明を適用したものである。
【0033】
以下、本実施の形態に係る血球計数装置について、図面を参照して説明する。
【0034】
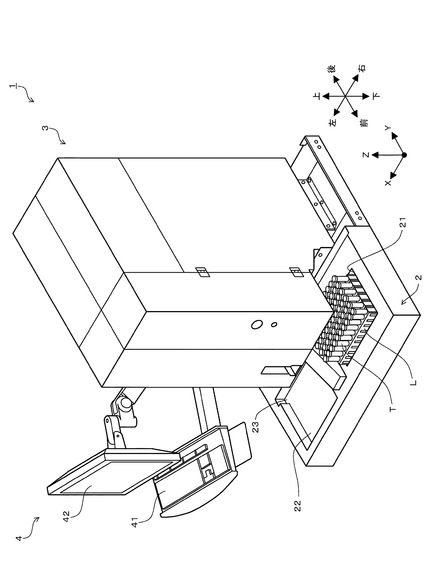
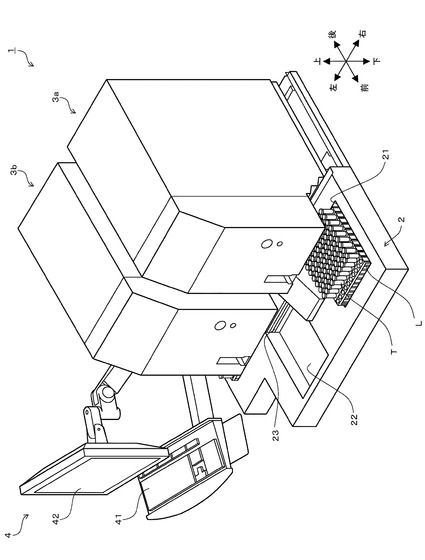
図1は、血球計数装置1の外観を示す斜視図である。本実施の形態に係る血球計数装置1は、搬送ユニット2と、測定ユニット3と、情報処理ユニット4から構成されている。
【0035】
搬送ユニット2は、測定ユニット3の前方に配置されており、右テーブル21と、左テーブル22と、右テーブル21と左テーブル22とをつなぐラック搬送部23とを備えている。右テーブル21と左テーブル22は、10個の保持部が形成された検体ラックLを収容することができる。
【0036】
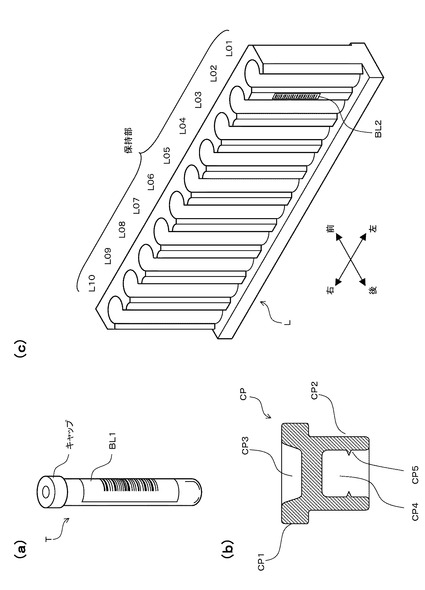
図2(a)〜(c)は、それぞれ、検体容器Tと、ゴム製のキャップCPと、検体ラックLの構成を示す図である。
【0037】
図2(a)を参照して、検体容器Tは、透光性を有するガラスまたは合成樹脂により構成された管状容器であり、上端が開口している。検体容器Tの外側面には、バーコードラベルBL1が貼付されている。バーコードラベルBL1には、個々の検体を識別可能な検体IDを含むバーコードが印刷されている。検体容器Tは、患者から採取された全血検体を収容しており、上端の開口は、後述するピアサ32が貫通可能なゴム製のキャップにより密封されている。
【0038】
図2(b)は、キャップの一例を示す図である。図2(b)には、キャップの中心軸を通る平面によってキャップを切断したときの断面が示されている。
【0039】
図2(b)を参照して、例示されたキャップCPは、円柱状の頭部CP1と円柱状の胴部CP2を有している。頭部CP1の上面には円形の凹部CP3が形成され、胴部CP2の下面には円柱状の凹部CP4が形成されている。また、凹部CP4の内側面には、所定の深さ位置にリング状の突部CP5が形成されている。キャップCPは、中心軸に対して対称な形状を有している。
【0040】
図2(b)に示す如く、かかるキャップCPは、凹部CP4が深く、且つ、所定の深さ位置にリング状の突部CP5が形成されている。このため、このキャップCPが検体容器Tの密封に用いられると、後述の攪拌動作によって、キャップCPの内側、すなわち、凹部CP4の底に全血検体が残り易い。
【0041】
検体容器Tの密封には、図2(b)に示すキャップCP以外のキャップも用いられ得る。キャップCP以外のキャップは、内側の凹部が浅く幅広である等、キャップCPに比べてキャップの内側に全血検体が残り難い形状となっている。なお、図2(b)に示すキャップCPは、乳白色を有し、色によって他のキャップと識別可能となっている。以下、図2(b)に示すキャップCPを、特に、「特定キャップCP」と称する。
【0042】
図2(c)を参照して、検体ラックLには、検体容器Tを垂直に保持することが可能な保持部L01〜L10が形成されている。検体ラックLの後方の側面には、バーコードラベルBL2が貼付されている。バーコードラベルBL2には、ラックIDを含むバーコードが印刷されている。
【0043】
図1に戻り、搬送ユニット2は、ユーザが右テーブル21に載置した検体ラックLを収容する。また、搬送ユニット2は、右テーブル21に収容している検体ラックLを搬送し
、検体容器Tが測定ユニット3に供給されるよう、検体ラックLをラック搬送部23の所定位置に位置付ける。さらに、搬送ユニット2は、ラック搬送部23上にある検体ラックLを搬送して、左テーブル22に回収する。
【0044】
測定ユニット3は、ラック搬送部23の所定の位置に検体容器Tが位置付けられると、ハンド部F15a、F15b(図3参照)により検体ラックLからこの検体容器Tを取り出して測定ユニット3の内部に搬送する。測定ユニット3は、この検体容器Tに収容された全血検体を測定ユニット3内で測定し、全血検体に含まれる血球を計数する。測定が終了すると、測定ユニット3は、この検体容器Tを再び元の検体ラックLの保持部に戻す。
【0045】
情報処理ユニット4は、入力部41と表示部42を備えている。また、情報処理ユニット4は、搬送ユニット2と、測定ユニット3と、ホストコンピュータ(図示せず)と、通信ネットワークを介して通信可能に接続される。情報処理ユニット4は、搬送ユニット2と測定ユニット3の動作を制御し、測定ユニット3で行われた測定結果に基づいて分析を行い、分析結果をホストコンピュータに送信する。
【0046】
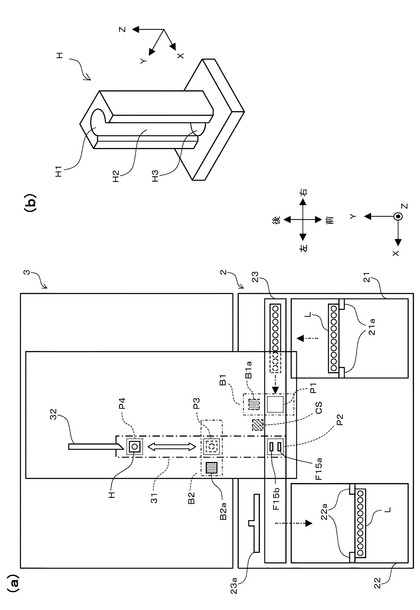
図3は、搬送ユニット2と測定ユニット3を上側からみたときの構成を示す平面図である。なお、右テーブル21、左テーブル22およびラック搬送部23の所定の位置には、検体ラックLおよび検体容器Tを検出するための各種センサが配置されているが、これらセンサは、図示省略されている。
【0047】
右テーブル21には、検体ラックLをラック搬送部23の右端位置に送り込むためのラック送込機構21aが設けられている。また、測定ユニット3には、ラック搬送部23の搬送路上の読取位置P1において、検体容器TのバーコードラベルBL1を読み取るためのバーコードリーダB1aを含むバーコードユニットB1が設置されている。さらに、測定ユニット3には、ラック搬送部23の搬送路上の取込位置P2において、検体容器Tを検体ラックLから上方向に抜き取るハンド部F15a、F15bが設けられている。ハンド部F15a、F15bは、検体容器Tの頭部(キャップ)を前後方向に挟持して、検体容器Tを上方向に抜き取り、抜き取った検体容器Tを左右方向に揺動させる。これにより、検体容器T内の全血検体が攪拌される。
【0048】
なお、ハンド部F15a、F15bは、後述する把持ユニットFの一部を構成するものである。把持ユニットFの構成は、追って、図5を参照して説明する。
【0049】
また、取込位置P2の近傍には、検体容器Tに装着されたキャップが特定キャップCPであるかを検出するためのカラーセンサユニットCSが設置されている。カラーセンサユニットCSは、白色光を発光する白色光源と、カラーセンサとを備えている。白色光源は、キャップを把持するハンド部F15a、F15bの間から白色光をキャップに照射する。カラーセンサは、白色光が照射されたキャップの色をハンド部F15a、F15bの間から検出し、赤色、青色、緑色の輝度レベルを示すデータを出力する。
【0050】
さらに、測定ユニット3には、ハンド部F15a、F15bによって抜き取られた検体容器Tを測定ユニット3内に搬送する検体容器搬送部31が設けられている。検体容器搬送部31は、検体容器ホルダHと、検体容器ホルダHを、一点鎖線で示す範囲において、前後方向に搬送する搬送機構(図示せず)とを備えている。
【0051】
図3(b)は、検体容器ホルダHの構成を示す図である。検体容器ホルダHは、円柱状の穴からなる容器収容部H1を備え、この容器収容部H1のX軸正側に、容器収容部H1を外部に開放する切欠きH2を有する。切欠きH2は、後述のバーコードユニットB2によって検体容器TのバーコードラベルBL1を読み取るために形成されている。さらに、
容器収容部H1の底に、球面状に凹んだ設置面H3が形成されている。
【0052】
容器収容部H1の径は、検体容器Tの径よりも大きくなっている。上側から容器収容部H1に検体容器Tが挿入されることにより、検体容器Tが、所定のクリアランスをもってホルダHに支持される。このとき、検体容器Tの底面は、球面上の設置面H3上に載置される。このため、検体容器Tの底部は、X−Y平面に平行な方向の移動が規制される。また、容器収容部H1の径は検体容器Tの径よりも大きいため、検体容器Tは、容器収容部H1の上端位置において、X−Y平面に平行な方向に移動可能である。したがって、検体容器Tは、頭部が揺れる状態で、検体容器ホルダHに支持される。
【0053】
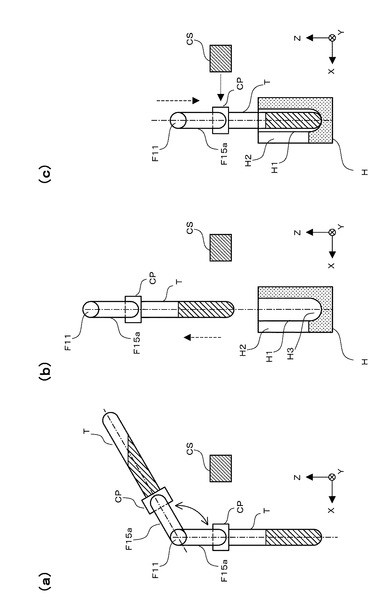
図4は、検体容器Tの攪拌からキャップの色の検出までの動作を模式的に示す図である。なお、図4(b)、(c)には、便宜上、検体容器ホルダHが、中心軸をとおり且つX−Z平面に平行な平面で切断された断面図によって示されている。
【0054】
検体容器Tがハンド部F15a、F15bによって検体ラックLから抜き取られると、図4(a)に示すように、ハンド部F15a、F15bが、回転軸F11を軸として、X−Z平面に平行な反時計方向に120度程度回転される。次に、ハンド部F15a、F15bが、回転軸F11を軸として、時計方向に回転される。以上の動作が、複数回繰り返される。これにより、検体容器Tの底部が頭部よりも高くなるように検体容器Tが動かされ、検体容器T内の全血検体が十分に攪拌される。なお、このように検体容器Tが転倒状態になるまで揺動されると、検体容器Tが直立状態に戻されても、キャップの形状や全血検体の粘性によっては、キャップの内側に全血検体が残ることがある。
【0055】
こうして攪拌動作が終了すると、図4(b)、図4(c)に示すように、ハンド部F15a、F15bが下方向(Z軸負方向)に移動されて、検体容器Tが検体容器ホルダHの容器収容部H1に収容される。この状態において、ハンド部F15a、F15bによる検体容器Tの把持が一旦解除されて、検体容器Tの底面が設置面H3上に載置され、その後、再び、ハンド部F15a、F15bによって検体容器Tの頭部が把持される。この状態において、カラーセンサユニットCSの白色光源から白色光が検体容器Tのキャップに照射され、キャップの色がカラーセンサによって検出される。ハンド部F15a、15bによって頭部を把持した状態で白色光源を照射するため、検体容器Tが傾いたまま色検出動作が行われることによる誤検出を回避できる。
【0056】
こうして、キャップの色検出動作が終了すると、ハンド部F15a、F15bによる検体容器Tの把持が解除され、ハンド部F15a、F15bが上方向(Z軸正方向)に移動する。これにより、検体容器ホルダHの後方への移動が可能となる。
【0057】
図3(a)に戻り、測定ユニット3には、検体容器搬送部31の搬送路上の読取位置P3において、検体容器TのバーコードラベルBL1を読み取るためのバーコードリーダB2aを含むバーコードユニットB2が設置されている。さらに、測定ユニット3には、ラック搬送部23の搬送路上の吸引位置P4において、検体容器Tから全血検体を吸引するためのピアサ32が配置されている。
【0058】
取込位置P2において検体容器ホルダHに支持された検体容器Tは、読取位置P3に搬送されてバーコードラベルBL1が読み取られる。その後、検体容器Tは、吸引位置P4に搬送される。吸引位置P4において、検体容器Tに装着されたキャップにピアサ32が突き刺され、ピアサ32により検体容器Tから全血検体が吸引される。吸引された全血検体は、測定ユニット3内の測定部(図示せず)において測定される。
【0059】
なお、読取位置P3においてバーコードラベルBL1が読み取られる際に、後述のよう
に、バーコードユニットB2において、適宜、キャップの内側に付着した全血検体を除去する処理が行われる。
【0060】
吸引位置P4において全血検体の吸引が終了すると、検体容器ホルダHが前方に移動され、検体容器Tが再び取込位置P2に位置付けられる。取込位置P2において、検体容器Tは、ハンド部F15a、F15bにより上方向に取り出される。この状態で、検体容器ホルダHが後方に移動され、その後、ハンド部F15a、F15bが下方向(Z軸負方向)に移動される。これにより、検体容器Tが、ラック搬送部23に位置付けられている検体ラックLの元の保持部に戻される。
【0061】
こうして、検体ラックLに保持されている全ての検体容器Tの全血検体の測定が終了すると、検体ラックLは、ラック搬送部23の左端位置まで送られる。しかる後、検体ラックLは、ラック押出し機構23aにより、左テーブル22の後方位置に押し出される。左テーブル22の後方位置に位置付けられた検体ラックLは、ラック送込機構22aにより、左テーブル22の前方に搬送される。
【0062】
図5は、検体容器Tを検体ラックLから抜き取る把持ユニットFの構成を示す図である。図5(a)は、把持ユニットFを上側から(Z軸負方向に)見たときの平面図であり、同図(b)は、把持ユニットFを右側から(X軸正方向に)見たときの側面図である。
【0063】
図5(a)、(b)を参照して、把持ユニットFは、支持体F10と、ベースF20を備えている。支持体F10には、回転軸F11と、エアシリンダF12と、支持板F13、F14と、ハンド部F15a、F15bと、軸F16と、バネF17が装着されている。
【0064】
支持体F10は、回転軸F11の周りに回転可能に、ベースF20に支持されている。回転軸F11は、支持体F10のフランジ部F10a、F10bに固着されている。さらに、回転軸F11の一端は、ベースF20のフランジ部F20aに回転可能に支持され、他端は、ベースF20に装着されたステッピングモータF18の駆動軸に固定されている。ステッピングモータF18が駆動されると、回転軸F11の周りに支持体F10が回転し、これと一体的に、エアシリンダF12と、支持板F13、F14と、ハンド部F15a、F15bと、軸F16と、バネF17が回転する。
【0065】
回転軸F11には、図3(a)に示したハンド部F15a、F15bが通されている。ハンド部F15aは、回動軸F11に沿って移動可能である。ハンド部F15a、F15bには、それぞれ、支持板F14、F13が固定されている。支持板F13は、支持体F10に装着された軸F16に固定されている。支持板F14は、エアシリンダF12から突出した軸F12aに連結されている。また、支持板F14の孔が軸F16に通されている。エアシリンダF12は、軸F12aをY軸方向に移動させる。エアシリンダF12が駆動されると、その駆動力が軸F12aと支持板F14を介してハンド部F15aに伝達され、ハンド部F15aが、回転軸F11に沿って移動する。
【0066】
バネF17の両端は、支持板F13、F14に固定されている。バネF17は、伸長作用により、支持板F14をY軸負方向に押している。ステッピングモータF18は、ベースF20に設置されている。上記のとおり、ステッピングモータF18の駆動軸には、回転軸F11のY軸方向の端部が固定されている。
【0067】
ベースF20をZ軸方向に移動させるための構成として、測定ユニット3の内壁33aに、プーリF21a、F21bが、Y軸を中心として回転可能となるよう設置されている。また、内壁33aには、ステッピングモータF23と、ガイド33bが設置されている
。プーリF21aは、ステッピングモータF23の軸にY軸を中心として回転可能となるよう設置されている。ベルトF22は、プーリF21a、F21bに掛け渡されており、ベースF20は、ベルトF22に固定されている。ベースF20には、受け部F24が設置されている。これにより、ベースF20は、受け部F24を介して、ガイド33bに沿ってZ軸方向に移動可能となる。
【0068】
図5(a)、(b)に示す状態から、エアシリンダF12により軸F12aがバネF17に逆らってY軸正方向に移動されると、ハンド部F15aが回転軸F11に沿ってY軸正方向に移動する。これにより、ハンド部F15a、F15bの間に位置付けられた検体容器Tの頭部(キャップ)が、ハンド部F15a、F15bにより把持される。他方、ハンド部F15a、F15bによりキャップが把持されている状態から、エアシリンダF12により軸F12aがY軸負方向に移動されると、ハンド部F15aが同図(a)の位置に位置付けられ、キャップの把持が解除される。
【0069】
また、ステッピングモータF18が駆動されると、回転軸F11がY軸を中心として回転し、支持体F10と共にハンド部F15a、F15bがY軸を中心として回転させられる。さらに、ステッピングモータF23が駆動されると、ベルトF22が移動し、ベースE20がZ軸方向に移動する。
【0070】
こうして、図4を参照して説明したように、把持ユニットFにより、検体ラックLから検体容器Tが抜き出され、検体容器Tが転倒攪拌される。また、把持ユニットFにより、転倒攪拌が終了した検体容器Tは、検体容器ホルダHにセットされ、測定が終了した検体容器Tは、検体容器ホルダHから抜き出され、検体ラックLの元の保持位置に戻される。
【0071】
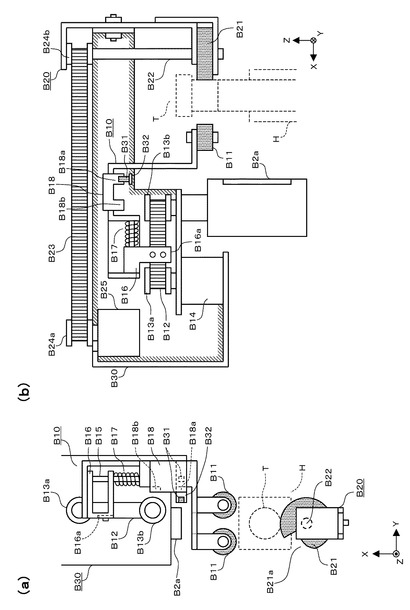
図6は、バーコードユニットB2の詳細な構成を示す図である。なお、バーコードユニットB1は、バーコードユニットB2に比べて、ローラB21に切欠きB21aが形成されていない点においてのみ相違しているため、ここでは説明を省略する。
【0072】
図6(a)は、ローラB11とローラB21の近傍を上側から見たときの平面図であり、同図(b)は、バーコードユニットB2を後側から(Y軸負方向に)見たときの側面図である。
【0073】
図6(a)、(b)を参照して、バーコードユニットB2は、支持体B10と、支持体B20と、ベースB30を備えている。支持体B10には、2つのローラB11と、軸B15と、遮光板B18が装着されている。また、支持体B10は、ベースB30に設置されX軸方向に伸びたガイド(図示せず)により、X軸方向に移動可能となるよう支持されている。ベースB30は、測定ユニット3内に固定されている。ベースB30には、プーリB13a、B13bと、ステッピングモータB14と、上述のバーコードリーダB2aと、発光部と受光部からなる透過型のセンサB31を支持するセンサ台B32が設置されている。センサ台B32は、ベースB30のX−Z平面に平行な側面から、Y軸正方向に突出するように設置されている。
【0074】
2つのローラB11は、支持体B10によってZ軸を中心として回転可能となるよう支持されている。ベルトB12は、プーリB13a、B13bに掛け渡されている。プーリB13aは、ステッピングモータB14の軸にZ軸を中心として回転可能となるよう設置され、プーリB13bは、ベースB30にZ軸を中心として回転可能となるよう設置されている。ステッピングモータB14が駆動されることにより、ベルトB12がプーリB13a、B13bの周りを移動する。
【0075】
軸B15には、支持部B16とバネB17が通されている。支持部B16は、軸B15
に沿ってY軸方向に所定幅だけ移動可能となっている。支持部B16には、鍔部B16aが形成されており、鍔部B16aは、ベルトB12に固定されている。バネB17は、伸長作用により、支持部B16をX軸正方向に押している。
【0076】
ここで、ベルトB12がプーリB13a、B13bの周りを移動すると、鍔部B16aを含む支持部B16はX軸方向に移動する。鍔部B16aがX軸負方向に移動されると、支持部B16がバネB17をX軸負方向に押し、支持体B10がX軸負方向に移動する。他方、鍔部B16aがX軸正方向に移動されると、支持部B16が、支持体B10のX軸正方向側のY−Z平面に平行な側面をX軸正方向に押すことにより、支持体B10がX軸正方向に移動する。
【0077】
遮光板B18には、Y軸に垂直な平面である遮光部B18a、B18bが形成されている。遮光部B18a、B18bは、支持体B10がX軸方向に移動されると、センサB31の発光部と受光部の間に位置付けられるよう構成されている。バーコードリーダB2aが、対象となる検体容器Tの正面(X軸正方向)に位置付けられると、図6(a)、(b)に示す如く、センサB31の発光部と受光部の間に遮光部B18aが位置付けられた状態から、支持体B10がX軸負方向に移動される。
【0078】
このように支持体B10がX軸負方向に移動されると、2つのローラB11が検体容器Tの側面に当接する。このとき、支持部B16は、ベルトB12の動きに合わせて、バネB17を縮めながらX軸負方向へ移動するものの、支持体B10はさらにX軸負方向へ移動することがない。このため、支持部B16が所定の幅だけ移動したときに、遮光部B18bがセンサB31の発光部と受光部の間に位置付けられなければ、検体容器ホルダHに検体容器Tが保持されていることが分かる。
【0079】
他方、検体容器ホルダHに検体容器Tが保持されていない場合、支持体B10が所定の幅だけX軸負方向に移動すると、遮光部B18bがセンサB31の発光部と受光部の間に位置付けられる。これにより、検体容器ホルダHに検体容器Tが保持されていないことが分かる。
【0080】
このように支持体B10を駆動するための機構が構成されると、支持体B10がX軸方向に移動される場合に、ステッピングモータB14から得られる支持部B16の移動幅と、センサB31の出力信号により、バーコードリーダB2aの正面に位置付けられた検体容器ホルダHにおける検体容器Tの有無が検知される。また、検体容器Tが保持されていることが検知されると、バーコードリーダB2aにより検体容器Tの検体IDが読み取られる。
【0081】
図6(b)を参照して、支持体B20には、ローラB21と、軸B22と、プーリB24bが装着されている。支持体B20は、ベースB30にネジ止めされている。
【0082】
ローラB21には、外周面の一部に切欠きB21aが形成されている。この切欠きB21aは、ローラB21aの回転時に先に検体容器Tに到達する方の端縁が、急激に、ローラB21aの中心方向に落ち込んでいる。すなわち、切欠きB21aのこの端縁は、ローラB21の中心に向かって段状に凹んでいる。切欠きB21aの反対側の端縁は、ローラB21の円周面へと滑らかに繋がる曲面となっている。
【0083】
また、ローラB21には、Z軸方向に貫通する孔が形成されている。軸B22は、この孔を貫通してローラB21を支持している。また、軸B22の両端は、支持体B20により、Z軸を中心として回転可能となるよう支持されている。ベルトB23は、プーリB24a、B24bに掛け渡されている。プーリB24aは、ステッピングモータB25の軸
にZ軸を中心として回転可能となるよう設置され、プーリB24bは、支持体B20と支軸B22に、Z軸を中心として回転可能となるよう設置されている。ステッピングモータB25は、ベースB30に設置されている。
【0084】
このようにローラB21を駆動するための機構が構成されると、ステッピングモータB25が駆動されることにより、ベルトB23がプーリB24a、B24bの周りを移動する。これにより、軸B22とローラB21がZ軸を中心として回転される。
【0085】
バーコード読取動作時には、検体容器ホルダHがバーコードユニットB2正面の読取位置P3に位置付けられた後、ステッピングモータB14が駆動され、支持体B10がX軸負方向に移動される。このとき、検体容器ホルダHに検体容器Tが支持されていると、2つのローラB11が検体容器Tの側面に当接し、2つのローラB11とローラB21によって検体容器Tが挟まれる。この状態から、さらに、ステッピングモータB14が駆動されると、バネB17による付勢によって、2つのローラB11が検体容器Tの側面に押し付けられる。その後、ステッピングモータB14が停止され、次に、ステッピングモータB25が駆動される。これにより、ローラB21が回転し、2つのローラB11とローラB21によって挟まれた検体容器Tが回転する。この状態で、バーコードリーダB2aによって、検体容器Tに貼付されたバーコードラベルBL1が読み取られる。
【0086】
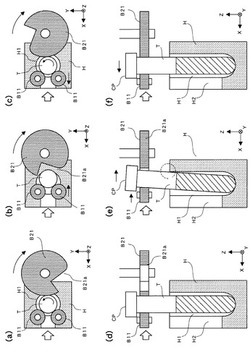
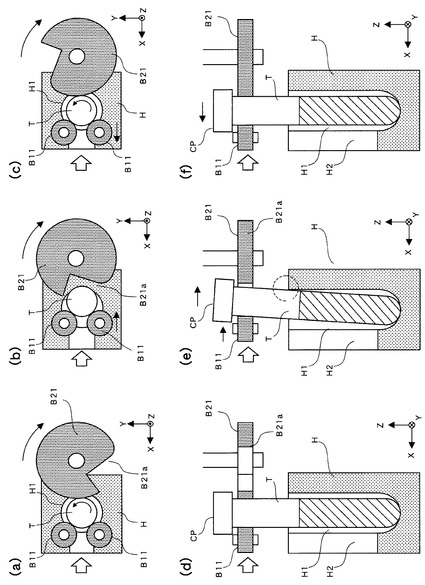
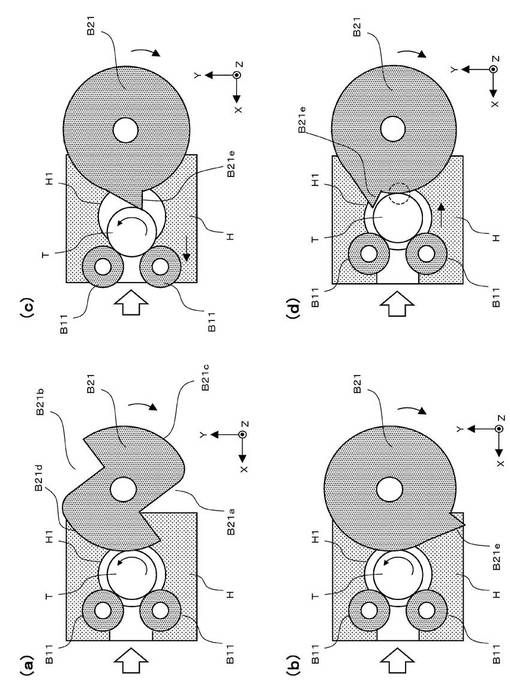
図7は、ローラB21が回転したときのバーコードユニットB2の動作を模式的に示す図である。図7(a)〜(c)は、ローラB21が各回転位置にあるときの検体容器TとローラB11の状態を示し、図7(d)〜(e)は、それぞれ、ローラB21が図7(a)〜(c)の回転位置にあるときの検体容器Tの状態を示している。なお、図7(d)〜(e)には、便宜上、検体容器ホルダHが、中心軸をとおり且つX−Z平面に平行な平面で切断された断面図によって示されている。
【0087】
ローラB21が図7(a)の回転位置にあるとき、検体容器Tは、図7(d)に示すように、直立状態にある。この場合、ローラB21は、切欠きB21a以外のローラB21の周面に接しており、また、2つのローラB11は、検体容器TのX軸正側の側面を押している。この状態において、ローラB21は、時計方向に回転駆動される。このため、検体容器Tは、ローラB21の回転に伴って、長手方向の軸の周りに、反時計方向に回転する。
【0088】
図7(a)の状態からローラB21の回転が進み、図7(b)のように、ローラB21の切欠きB21aが検体容器Tの位置に到達すると、検体容器Tの頭部が、ローラB11に押されて、X軸負方向に変位する。この場合、切欠きB21aは、円周方向右側の端縁が、急激に、ローラB21aの中心方向に落ち込んでいるため、検体容器Tの頭部は、ローラB11による付勢、すなわち、図6(a)、(b)に示すバネB17による付勢によって、素早くX軸負方向に移動する。ここで、検体容器Tは、上述のように、検体容器ホルダHによって頭部が揺れる状態で支持されているため、図7(e)のように、直立状態から右方向に傾くように移動する。この移動により、検体容器Tは、図7(e)の破線の円で囲んだ箇所が、検体容器ホルダHの容器収容部H1の上端縁に打ち付けられ、検体容器に衝撃が加わる。
【0089】
上記図4(a)に示す攪拌動作によってキャップCPの内側に全血検体が付着している場合、図7(e)の破線円の位置において検体容器Tの移動が唐突に規制されることにより、キャップCPの内側に付着している全血検体に、キャップCPから離反する力が加わる。この力によって、キャップCPの内側から全血検体が検体容器T内に落とされる。なお、図7(e)の状態において、ローラB21は検体容器Tの外周面に当接していないため、検体容器Tの回転は中断状態にある。
【0090】
なお、キャップCPの内側に全血検体が付着している場合、図7(b)の工程においても、キャップCP内側の全血検体に、キャップCPから離反する力が付与される。すなわち、図7(b)の工程では、検体容器TがローラB11に押されて素早く変位するため、この変位によって、キャップCPの内側に付着した全血検体に対して、検体容器Tの変位方向と反対方向の力が加わる。したがって、このときにも、キャップCPの内側に付着した全血検体が、ある程度、検体容器T内に落ちることが期待され得る。
【0091】
その後、ローラB21の回転が進み、図7(c)のように、ローラB21の切欠きB21aが検体容器Tの位置を過ぎると、図7(f)のように、検体容器Tが再び直立状態に戻される。そして、ローラB21の回転に伴って、検体容器Tが、再び、反時計方向に回転を始める。このように、検体容器Tの回転の開始と停止が繰り返されることにより、キャップCPの内側に付着した全血検体には、回転による遠心力と、回転の停止による慣性力も付与される。
【0092】
なお、ローラB21は、後述のように、バーコードラベルBL1の読み取り時には、バーコードラベルBL1の読み取りが適切に行われるよう低速で回転され、キャップCPから全血検体を除去する動作においては、キャップCPの内側から全血検体を除去できるよう高速で回転される。バーコードリーダB2aは、ローラB21が低速で回転する際に、検体容器ホルダHの切欠きH2を介して、検体容器Tに貼付されたバーコードラベルBL1を読み取る。本実施の形態では、ローラB21の、切欠きB21aが形成されていない外周面の周方向の長さが、検体容器Tの外周面の周方向の長さの2倍よりやや長くなるように設定されている。このため、ローラB21が1回転すると、検体容器Tは直立状態において、少なくとも2回転する。したがって、検体容器Tが直立状態で2回転する間に、バーコードリーダB21aによって、バーコードラベルBL1が適正に読み取られ得る。
【0093】
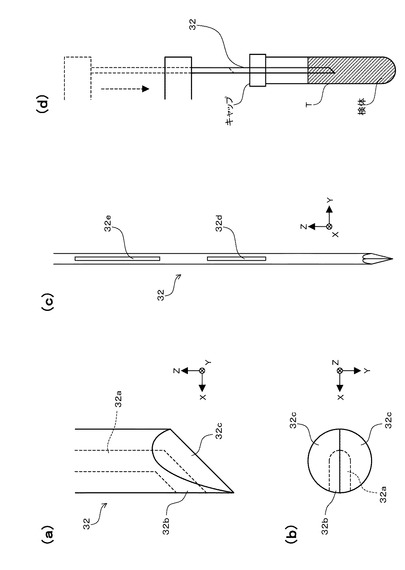
図8(a)、(b)は、それぞれ、ピアサ32の下端を側面から見た場合の拡大図および下側から見た場合の拡大図である。図8(c)は、ピアサ32の胴部分の構成を示す図である。図8(d)は、ピアサ32による吸引動作を示す図である。
【0094】
ピアサ32の内部には上下方向に吸引経路32aが形成されている。ピアサ32の下端近傍において、吸引経路32aは左方向に曲がっており、開口32bを介して外部に開いている。ピアサ32の下端には、Y−Z平面に対して対称な2つの切り込み32cが形成されている。2つの切り込み32cにより、ピアサ32の下端が尖った形状となっている。このようにピアサ32が構成されているため、図8(d)のように、検体容器Tの上側からピアサ32が下降されると、ピアサ32の下端はキャップを突き破って検体容器T内に進入することができる。
【0095】
図8(c)に示すように、ピアサ32のX軸負側の側面には、長手方向に延びる溝32d、32eが形成されている。X−Y平面に平行な面でピアサ32を切断したときの溝32d、32eの形状は、ピアサ32の中心方向に凹んだV字形状となっている。これらの溝32d、32eは、図8(d)のように、ピアサ32を検体容器Tのキャップに突き刺したときに、検体容器Tの内部を外部に連通させて検体容器T内の圧力を大気圧に減圧する役割を担っている。
【0096】
検体容器T内の圧力は、大気圧より高くなっている。これは、検体容器T内に全血検体を収容した後、キャップを検体容器Tに装着するため、キャップを検体容器Tの頭部に被せて押し込む際に、空気が圧縮されることによるものである。このように検体容器T内の圧力が高いまま全血検体の吸引を行うと、全血検体の吸引量が安定しなくなる。溝32d、32eは、このように高くなっている検体容器T内の圧力を、上記のように、大気圧ま
で減圧し、検体吸引時の定量精度を確保するためのものである。しかしながら、溝32d、32eがキャップを通るときには、検体容器T内の空気が、溝32d、32eを通って外部に流出するため、キャップの内側に全血検体が残っていると、空気とともに、全血検体が溝32d、32eを通って外部に漏れ出す場合がある。
【0097】
本実施の形態では、後述のように、キャップにピアサ32を突き刺す前に、適宜、キャップの内側に残っている全血検体を除去する処理が行われるため、キャップにピアサ32を突き刺す際に、溝32d、32eを通って全血検体が外部に漏れ出すことが防止される。
【0098】
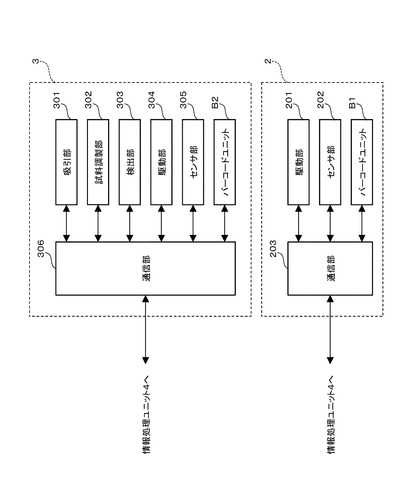
図9は、搬送ユニット2と測定ユニット3の構成を示す図である。
【0099】
搬送ユニット2は、駆動部201と、センサ部202と、バーコードユニットB1と、通信部203を備える。
【0100】
駆動部201は、搬送ユニット2内で検体ラックLを搬送するための機構を含んでおり、センサ部202は、搬送ユニット2内の各位置において検体ラックLを検出するためのセンサを含んでいる。バーコードユニットB1は、上述したように、バーコードリーダB1aを含んでいる。
【0101】
通信部203は、情報処理ユニット4と通信可能に接続されている。搬送ユニット2内の各部は、通信部203を介して、情報処理ユニット4により制御される。また、搬送ユニット2内の各部から出力される信号は、通信部203を介して情報処理ユニット4に送信される。
【0102】
測定ユニット3は、吸引部301と、試料調製部302と、検出部303と、駆動部304と、センサ部305と、バーコードユニットB2と、通信部306を備える。
【0103】
吸引部301は、ピアサ32を介して検体容器T内の全血検体を吸引する機構を含んでいる。試料調製部302は、反応チャンバを含んでおり、各反応チャンバ内で、吸引された全血検体と希釈液と、必要に応じて溶血剤とを混合攪拌し、測定用の試料を調製する。検出部303は、電気抵抗式の検出器と光学式の検出器を含んでおり、試料調製部302により調製された試料に含まれる血球を検出し、計数する。
【0104】
駆動部304は、ハンド部F15a、F15bを駆動させるための機構と、検体容器搬送部32を駆動させるための機構と、ピアサ32を測定ユニット3内で移動するための機構と、測定ユニット3内で検体容器を搬送するための機構と、これらの機構に動力を付与するステッピングモータ等の駆動原を含んでいる。センサ部305は、測定ユニット3内の各位置で検体容器Tを検出するためのセンサを含んでいる。バーコードユニットB2は、上述したように、バーコードリーダB2aを含んでいる。
【0105】
通信部306は、情報処理ユニット4と通信可能に接続されている。測定ユニット3内の各部は、通信部306を介して、情報処理ユニット4により制御される。また、測定ユニット3内の各部から出力される信号は、通信部306を介して情報処理ユニット4に送信される。
【0106】
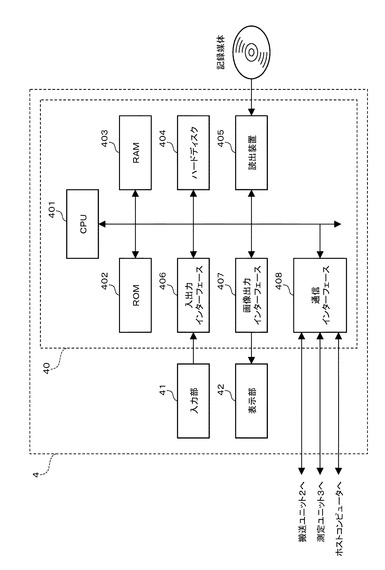
図10は、情報処理ユニット4の構成を示す図である。
【0107】
情報処理ユニット4は、パーソナルコンピュータからなり、本体40と、入力部41と、表示部42から構成されている。本体40は、CPU401と、ROM402と、RA
M403と、ハードディスク404と、読出装置405と、入出力インターフェース406と、画像出力インターフェース407と、通信インターフェース408を有する。
【0108】
CPU401は、ROM402に記憶されているコンピュータプログラムおよびRAM403にロードされたコンピュータプログラムを実行する。RAM403は、ROM402およびハードディスク404に記録されているコンピュータプログラムの読み出しに用いられる。また、RAM403は、これらのコンピュータプログラムを実行するときに、CPU401の作業領域としても利用される。
【0109】
ハードディスク404には、オペレーティングシステムおよびアプリケーションプログラムなど、CPU401に実行させるための種々のコンピュータプログラムおよびコンピュータプログラムの実行に用いるデータが記憶されている。具体的には、特定キャップCPを特定するために用いる輝度の閾値データや、キャップが検体容器Tに装着されていないことを検出するために用いる輝度の閾値データの他、測定や解析に用いられるコンピュータプログラムおよびデータと、測定ユニット3と搬送ユニット2の各部を制御するためのコンピュータプログラムおよびデータが記憶されている。
【0110】
読出装置405は、CDドライブまたはDVDドライブ等によって構成されており、記録媒体に記録されたコンピュータプログラムおよびデータを読み出すことができる。入出力インターフェース406には、マウスやキーボードからなる入力部41が接続されており、ユーザが入力部41を使用することにより、情報処理ユニット4に指示およびデータが入力される。画像出力インターフェース407は、ディスプレイ等で構成された表示部42に接続されており、画像データに応じた映像信号を、表示部42に出力する。表示部42は、入力された映像信号をもとに、画像を表示する。通信インターフェース408により、搬送ユニット2と、測定ユニット3と、ホストコンピュータに対してデータの送受信が可能となる。
【0111】
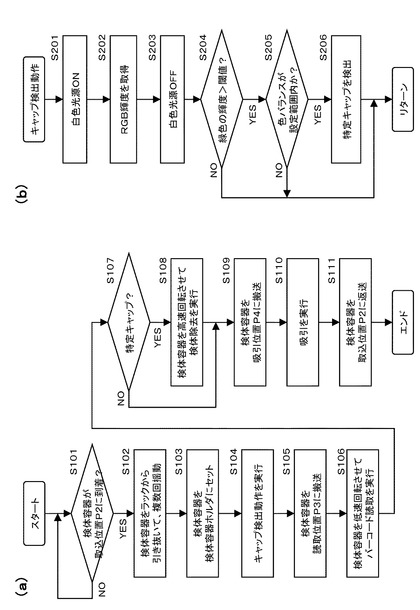
図11は、検体容器Tが取込位置Pに到着したときに情報処理ユニット4により行われる処理を示すフローチャートである。
【0112】
検体容器Tが取込位置P2に到着すると(S101:YES)、CPU401は、把持ユニットFを制御して、検体容器Tを検体ラックLから引き抜き、図4(a)に示す攪拌動作を複数回(たとえば、10往復)実行する(S102)。次に、CPU401は、図4(b)、(c)を参照して説明したように、検体容器ホルダHを取込位置P2に搬送するとともに把持ユニットFを制御して、攪拌動作を行った検体容器Tを検体容器ホルダHにセットする(S103)。そして、CPU401は、図4(c)を参照して説明したように、カラーセンサユニットCSを作動させ、この検体容器Tに装着されたキャップの種別を検出するキャップ検出動作を実行する(S104)。
【0113】
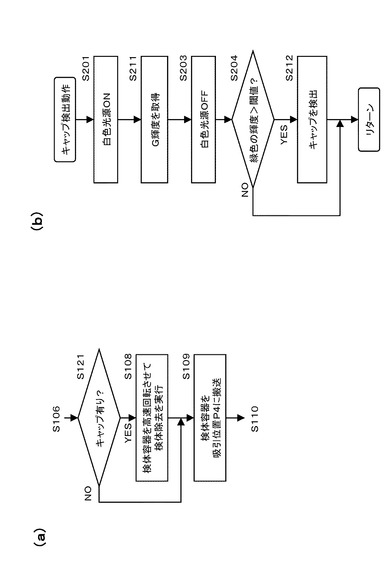
その後、CPU401は、搬送容器ホルダHを駆動して検体容器Tを読取位置P3に搬送する(S105)。そして、CPU401は、バーコードユニットB2を制御して、検体容器Tを低速(たとえば、2.5回転/秒)で所定回数(たとえば1回)回転させながら、検体容器Tに貼付されたバーコードラベルBL1を読み取る(S106)。しかる後、CPU401は、ステップS104における検出結果に基づいて、この検体容器Tに装着されたキャップが特定キャップCPであるか否かを判定する。
【0114】
検体容器Tに装着されたキャップが特定キャップCPでない場合(S107:NO)、CPU401は、検体容器Tを、検体容器ホルダHとともに、吸引位置P4に搬送する(S109)。他方、検体容器Tに装着されたキャップが特定キャップCPである場合(S107:YES)、CPU401は、バーコードユニットB2を制御して、検体容器Tを
高速(たとえば、5回転/秒)で複数回(たとえば、5回)回転させ、特定キャップCPの内側に付着した全血検体を除去する動作を実行する(S108)。この動作において、検体容器Tは、図7を参照して説明したように頭部を振って変位し、検体容器Tの側面が複数回(たとえば、5回)検体容器ホルダHの上縁部に打ち付けられ、検体容器に衝撃が加えられる。これにより、特定キャップCPの内側に付着した全血検体が、検体容器T内に落とされる。しかる後、CPU401は、検体容器Tを、検体容器ホルダHとともに、吸引位置P4に搬送する(S109)。
【0115】
こうして検体容器Tが吸引位置P4に位置付けられると、CPU401は、図8(d)に示すように、ピアサ302を下降させ、検体容器T内の全血検体を吸引する動作を実行する(S110)。このとき、ピアサ32は、検体容器Tに装着されたキャップを貫通する。また、ピアサ32の側面に形成された溝32d、32eによって、検体容器T内の圧力が大気圧まで減圧される。
【0116】
こうして、吸引動作が終了すると、CPU401は、検体容器Tを、検体容器ホルダHとともに、取込位置P2に搬送し、把持ユニットFを制御して、検体容器ホルダHに支持された検体容器Tを検体ラックLの元の保持位置に戻す(S111)。これにより、当該検体容器Tに対する処理が終了する。しかる後、CPU401は、ステップS101に戻り、次の検体容器Tが取込位置P2に搬送されるのを待つ。
【0117】
図11(b)は、図11(a)のステップS104におけるキャップ検出動作を示すフローチャートである。
【0118】
キャップ検出動作において、CPU401は、カラーセンサユニットCSの白色光源を点灯させ、検体容器Tに装着されたキャップに白色光を照射する(S201)。そして、CPU401は、カラーセンサを作動させ、白色光が照射されたキャップから、赤色、緑色、青色の輝度に関するデータを取得する(S202)。輝度データが取得されると、CPU401は、白色光源を消灯する(S203)。
【0119】
輝度データを取得した後、CPU401は、取得した緑色の輝度が、キャップが装着されていないことを検出するために予め設定された閾値を越えているかを判定する。取得した緑色の輝度がこの閾値を越えていない場合(S204:NO)、CPU401は、この検体容器Tにはキャップが装着されていないとして、キャップ検出動作を終了する。この場合、特定キャップが検出されなかったことになる。他方、取得した緑色の輝度がこの閾値を越えていると(S204:NO)、CPU401は、この検体容器Tには何らかのキャップが装着されているとして、処理をステップS205に進める。
【0120】
ステップS205において、CPU401は、取得した赤色、緑色、青色の輝度のバランス(色バランス)が、特定キャップの色(乳白色)であることを特定するために予め設定された範囲に含まれるかを判定する(S205)。具体的には、取得した赤色、緑色、青色の輝度をそれぞれR、G、Bで表すとすると、1−a<R/Gであり、且つ、R/G<1+bが満たされる場合に、取得した赤色、緑色、青色の輝度のバランス(色バランス)が、特定キャップの色(乳白色)であることを特定するための設定範囲に含まれると判定される。ここで、a、bは、特定キャップの色が多少くすんでいるような場合にも、特定キャップを検出可能とするための調整定数である。
【0121】
ステップS205における判定がYESである場合、CPU401は、この検体容器Tに装着されたキャップが特定キャップであることを検出する。他方、ステップS205における判定がNOである場合、CPU401は、この検体容器Tに装着されたキャップは特定キャップ以外のキャップであるとして、キャップ検出動作を終了する。この場合、特
定キャップが検出されなかったことになる。
【0122】
以上、本実施の形態によれば、全血検体が吸引される前に、検体容器Tに力が加えられて、特定キャップCPの内側から全血検体が除去されるため、全血検体の攪拌動作によって特定キャップCPの内側に全血検体が付着したとしても、吸引前に特定キャップCPの内側から全血検体を除去することができる。よって、吸引の際にピアサ32を特定キャップCPに貫通させても、貫通個所から特定キャップCPの上部に全血検体が漏れ出すことを防止できる。
【0123】
なお、本実施の形態は、全血検体を収容した後にキャップを押し込んで密閉した検体容器を例に示したように、内部の気圧が大気圧よりも気圧が高い検体容器において、大気開放の際に内部の空気とともに血液が噴き出すことを防止するのに特に好適である。本発明が適用される検体容器の種類はこれに限られず、真空採血管にも本発明が適用され得る。
【0124】
なお、上記実施の形態では、ローラB21を複数回(たとえば5回)回転させ、検体容器Tを複数回(5回)直立状態から変位させたが、検体容器Tを1回だけ変位させるだけでも、特定キャップCPの内側から全血検体を除去できる場合には、検体除去動作時におけるローラ21の回転は1回転のみであっても良い。
【0125】
また、本実施の形態によれば、検体容器Tが頭部を振って変位する際に、検体容器Tの側面が検体容器ホルダHの上縁部に当接し、検体容器Tの変位が唐突に規制されるため、かかる変位の規制により、特定キャップCPの内側に付着した全血検体に急激な慣性力、つまり衝撃が付与されるようになる。これにより、蓋の内側に付着した全血検体を円滑に除去することができる。
【0126】
また、本実施の形態によれば、バーコードユニットB2のローラB21に切欠きB21aを設けることにより、検体容器Tを変位させるよう構成したため、別途、検体容器を変位させるための機構を設ける必要がなく、全血検体除去のための構成を簡素化することができる。
【0127】
また、本実施の形態によれば、検体除去動作時のローラB21の回転速度をバーコード読取動作時のローラB21の回転速度よりも早くしたため、検体容器Tに切欠きB21aが到達したときに、検体容器TをローラB21の中心に向かう方向に素早く変位させることができる。すなわち、切欠きB21aの前端が検体容器Tに到達した後、検体容器Tは、その周面が切欠きB21の前端に摺接しながら、ローラB21の中心に向かう方向に移動する。したがって、ローラB21の回転速度を早めると、検体容器Tの周面が切欠きB21の前端に摺接する期間が短くなり、結果、検体容器TをローラB21の中心に向かう方向の速度を高めることができる。加えて、検体除去動作時のローラB21の回転速度を高めることにより、検体除去動作を短時間で終えることができ、検体の吸引動作へと迅速に移行することができる。
【0128】
また、本実施の形態によれば、特定キャップCPが検出された場合にのみ、検体除去動作(図11(a)のステップS108)が実行されるため、全血検体が付着しにくいキャップが装着された検体容器T、すなわち、全血検体の除去を行う必要のない検体容器Tに対して、無駄に検体除去動作が行われるのを回避することができ、処理の迅速化および効率化を図ることができる。
【0129】
なお、この場合、キャップが装着されておらず、検体容器Tの上部が開放された検体容器も、特定キャップが検出されず、結果、キャップが装着されていない検体容器Tに対しても検体除去動作が実行されない。このため、キャップが装着されていない検体容器Tに
対して検体除去動作が実行されることにより、検体容器の上部から全血検体が飛び出すことを回避することができる。
【0130】
以上、本発明の実施の形態について説明したが、本発明の実施の形態はこれらに限定されるものではない。
【0131】
たとえば、上記実施の形態では、測定ユニット3を一つだけ備える血球計数装置1が例示されたが、測定ユニットの数は一つに限られず、たとえば、図12に示すように、2つの測定ユニット3a、3bを備える血球計数装置1に本発明を適用することもできる。この場合、それぞれの測定ユニット3a、3bは、上記実施の形態に示した測定ユニット3と同様の構成を備え、各測定ユニット3a、3bにおいて、検体攪拌動作と、検体除去動作が行われる。
【0132】
また、上記実施の形態では、検体容器Tに特定キャップCPが装着されている場合にのみ、検体除去動作(図11(a)のステップS108)が実行されたが、特定キャップCP以外のキャップが装着された検体容器Tにも検体除去動作を実行しても良い。ただし、キャップが装着されていない検体容器Tに対しては、検体除去動作を実行すると、検体容器Tに付与された衝撃によって全血検体が漏れ出る可能性があるため、検体除去動作は実行しないのが望ましい。
【0133】
図13(a)は、キャップが装着された全ての検体容器Tに対して検体除去動作を実行する場合の変更例を示すフローチャートである。この変更例では、図11(a)のステップS107が、ステップS121に置き換えられている。また、図11(a)のステップS104におけるキャップ検出動作が、図11(b)から図13(b)のように変更される。
【0134】
図13(b)に示すように、この変更例では、カラーセンサによって緑色の輝度データのみが検出される(S211)。そして、検出された緑色の輝度データが上述の閾値を越える場合(S204:YES)は、検体容器Tの頭部にキャップがあることが検出され(S212)、カラーセンサにより検出された緑色の輝度データが閾値を越えない場合(S204:NO)は、検体容器Tの頭部にキャップがあることが検出されない。
【0135】
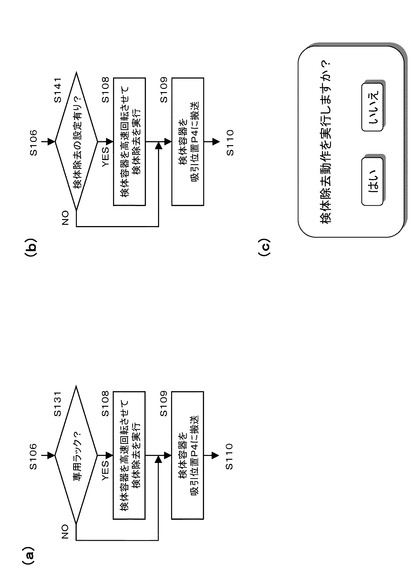
そして、図13(a)に示すように、ステップS106においてバーコードラベルBL1の読み取りが行われた後、ステップS121において、検体容器Tにキャップが装着されているかが、図13(b)のキャップ検出動作における検出結果に基づいて判定される。そして、検体容器Tにキャップが装着されている場合(S121:YES)には、ステップS108において、検体除去動作が実行され、検体容器Tにキャップが装着されていない場合(S121:NO)には、ステップS108における検体除去動作が実行されずに、検体容器Tが吸引位置P4に搬送される(S109)。
【0136】
この変更例によれば、キャップが装着されている全ての検体容器に対して検体除去動作が実行されるため、検体除去動作を行う必要がない検体容器Tに対して無駄な検体除去動作が行われることにより処理が非効率となる。しかし、その反面、全血検体が付着し難いキャップに万一全血検体が付着しているような場合にも、キャップから全血検体を除去することができ、吸引動作時に、キャップの上面から全血検体が漏れ出すことをより徹底して防止することができる。なお、この変更例においても、キャップが装着されていない検体容器Tには、検体除去動作が実行されないため、キャップが装着されていない検体容器Tから全血検体が飛び出すことが回避される。
【0137】
図14(a)は、検体容器Tに対して検体除去動作を実行するか否かを検体ラックLの
種別に応じて決定する変更例の動作を示すフローチャートである。この変更例では、図11(a)のステップS107が、ステップS131に置き換えられ、図11(a)のステップS104が省略される。また、この変更例において、ユーザは、検体除去動作を行う検体容器Tを、専用の検体ラック(専用ラック)SLに装着して、右テーブル21にセットする。専用ラックSLは、図2(c)に示すバーコードラベルBL2に保持されたラックIDによって識別可能となっている。
【0138】
この変更例では、ステップS106においてバーコードラベルBL1の読み取りが行われると、ステップS131において、検体容器Tが専用ラックSLに装着されていたかが判別される。この判別は、バーコードユニットB1においてバーコードラベルBL2から読み取られたラックIDに基づいて行われる。そして、検体容器Tが専用ラックSLに装着されていた場合(S131:YES)には、ステップS108において、検体除去動作が実行され、検体容器Tが専用ラックSLに装着されていなかった場合(S131:NO)には、ステップS108における検体除去動作が実行されずに、検体容器Tが吸引位置P4に搬送される(S109)。
【0139】
この変更例によれば、キャップの内側に全血検体が付着する可能性がある場合、ユーザは、専用ラックSLに検体容器Tをセットして、専用ラックSLを右テーブル21にセットすれば良い。よって、効率的に、検体除去動作を実行することができる。
【0140】
図14(b)は、検体容器Tに対して検体除去動作を実行するか否かをユーザが手動で設定する変更例の動作を示すフローチャートである。この変更例では、図11(a)のステップS107が、ステップS141に置き換えられ、図11(a)のステップS104が省略される。
【0141】
この変更例では、たとえば、各検体容器Tに対してオーダ登録を行う場合に、たとえば、図14(b)のようなダイアログが情報処理ユニット4の表示部42に表示される。このダイアログにおいて“はい”のボタンが操作されると、この検体容器Tに対して検体除去動作を実行する設定がなされ、“いいえ”のボタンが操作されると、この検体容器Tに対して検体除去動作を実行する設定がなされない。
【0142】
図14(b)を参照して、ステップS106においてバーコードラベルBL1の読み取りが行われると、ステップS141において、検体容器Tに対して検体除去動作を実行する設定がなされているか否かが判別される。そして、検体除去動作を実行する設定がなされていると(S141:YES)、ステップS108において、検体除去動作が実行され、検体除去動作を実行する設定がなされていなければ(S141:NO)には、ステップS108における検体除去動作が実行されずに、検体容器Tが吸引位置P4に搬送される(S109)。この変更例は、特に、一本ずつ検体容器Tを測定ユニット3にセットして測定を行う血球計数装置に用いて好適なものである。
【0143】
なお、上記実施の形態における図11(a)の動作およびこれを修正した図13(a)および図14(b)の動作は、測定ユニット3において攪拌動作を行わずに、ユーザが手作業で攪拌動作を行う場合にも、適宜修正して適用可能である。たとえば、これらのフローチャートによる動作は、測定ユニット3に攪拌機能が装備されていない場合にも適用可能である。
【0144】
この場合、たとえば、検体容器ホルダHが測定ユニット3の外部まで搬出され、搬出された検体容器ホルダHに直接、手作業にて攪拌された検体容器Tがセットされる。その後、測定開始ボタンの操作により、検体容器ホルダHが、測定ユニット3の内部に搬入され、搬送路上の所定の位置で、ステップS104におけるキャップ検出動作が行われる。そ
の後、ステップS105〜ステップS110の動作が実行される。ステップS110の吸引動作が終了すると、検体容器ホルダHが測定ユニット3の外部に搬出され(S111)、ユーザにより、検体容器Tが取り除かれる。
【0145】
このような構成においても、ユーザが手作業で攪拌する際にキャップの内側に付着した全血検体を、全血検体の吸引前に除去することができるため、検体吸引時に、キャップの内側に付着した全血検体がキャップの外側に漏れ出すことを防止することができる。
【0146】
また、上記実施の形態では、ローラB21に切欠きが一つだけ形成された例が示されたが、ローラB21に形成される切欠きの数は一つに限らず、複数であっても良い。また、ローラB21に、切欠きではなく突部を形成しても良く、あるいは、切欠きと突部を組み合わせても良い。さらに、検体容器Tを変位させるための形状を有するローラは、一つではなく、複数あっても良い。
【0147】
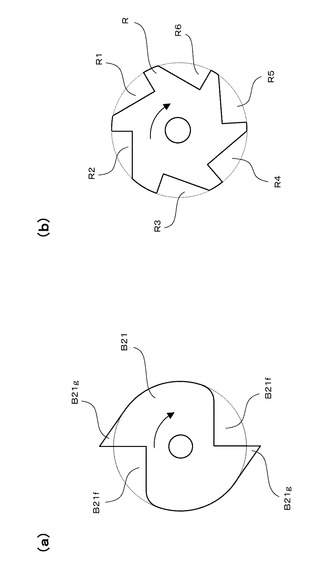
図15(a)は、ローラB21に2つの切欠きが形成される場合の変更例を示す図である。この変更例では、ローラB21の外周面に、上記実施の形態に係る切欠きB21aの他、切欠きB21bが形成されている。切欠きB21bの形状は、切欠きB21aの形状と同じである。この変更例では、ローラB21が1回転する間に、検体容器Tが、ローラB21の中心方向に2回変位するため、上記実施の形態に比べて、より効率的に全血検体を除去することができる。この場合、検体容器Tに付されたバーコードラベルBL1は、切欠きB21a、B21bが形成されていないローラB21の外周面B21c、B21dが検体容器Tに当接する間に読み取られる。外周面B21c、B21dの円周方向の長さは、それぞれ、検体容器Tの円周方向の長さよりもやや大きく設定される。
【0148】
図15(b)〜(d)は、ローラB21に突部が形成される場合の変更例を示す図である。この変更例では、ローラB21の外周面に、ローラB21の中心からの距離が徐々に大きくなる傾斜面を有する突部B21eが形成されている。突部B21eの傾斜面の終端は、段状に、ローラB21の円の径に対応する距離に戻されている。
【0149】
図15(b)の状態からローラB21の回転が進むと、検体容器Tが突部B21eの斜面に押され、検体容器TとローラB11が、図6のバネB17の付勢に抗して、X軸正方向に変位する。その後、ローラB11がさらに回転すると、図15(c)の状態から、突部B21eの終端が検体容器Tの側面を乗り越え、図15(d)のように、検体容器TがバネB17の付勢によって素早くローラB21の中心方向に変位する。こうして検体容器Tが変位すると、検体容器Tの頭部が、図15(d)の破線の丸の位置において、ローラB21の側面に衝突する。この衝突により、検体容器Tのキャップの内側に付着した全血検体が検体容器T内に落とされる。
【0150】
なお、図15(b)〜(d)には、ローラB21の外周面に、突部が一つだけ形成されているが、突部の数は一つに限られず、複数の突部がローラB21の外周面に形成されても良い。また、突起の形状は、図15(b)〜(d)のような三角形状に限らず、台形や、曲面部分を持つ形状であっても良い。ただし、突起の後端部は、段状に円周面へと続くように形成される必要がある。
【0151】
図16(a)は、ローラB21の外周面に突部と切欠きが設けられた変更例を示す図である。この変更例では、突部B21gの終端が切欠きB21fの始端に繋がっている。切欠きB21fは、図15(a)の切欠きB21a、B21bと同様に形成されている。突部B21gは、図15(b)の突部B21eと同様に形成されている。なお、図16(a)に破線で付された円は、切欠きB21fと突部B21gが形成されない場合のローラB21の輪郭を示している。
【0152】
この変更例によれば、突部B21gの終端の高さと切欠きB21fの始端の深さとを加算した距離だけ検体容器Tを変位させることができるため、上記実施の形態の場合に比べて、検体容器Tが切欠きB21fの位置に達したときの検体容器Tの移動速度を高めることができる。このため、図7(e)のように検体容器Tが容器収容部H1の上縁部に当接するときの速度を高めることができ、キャップCPの内側に付着した全血検体により大きな力を加えることができる。よって、本変更例によれば、全血検体の除去作用をさらに高めることができる。
【0153】
上記実施の形態および変更例では、バーコードユニットB2のローラB21に、検体容器Tに力(衝撃)を加えるための構成を付加したが、検体容器搬送部31の搬送路上の、読取位置P3以外の位置に、別途、検体容器Tに力を加えてキャップから全血検体を除去するための構成を追加しても良い。この場合、上記と同様、外周面に切欠きまたは突部が形成され回転駆動されるローラと、他の2つのローラとで検体容器Tを弾性的に挟持する構成が設けられても良く、あるいは、別の形態であってもよい。例えば、検体容器Tの側面を軽く殴打して、検体容器Tに力(衝撃)を加える構成が設けられても良い。あるいは、検体容器Tのキャップを上から殴打して検体容器Tに力(衝撃)を加える構成であってもよい。
【0154】
回転駆動されるローラと、他の2つのローラとで検体容器Tを弾性的に挟持する構成が設けられる場合、図16(b)に示すように、回転駆動されるローラRに、複数の浅い切欠きR1〜R6が形成されても良い。なお、図16(b)に破線で付された円は、切欠きR1〜R6が形成されない場合のローラRの輪郭を示している。
【0155】
この構成の場合、切欠きR1〜R6が浅いため、切欠きR1〜R6が検体容器Tの位置に到達して検体容器Tが変位すると、検体容器Tは、図7(e)のように側面が容器収容部H1の上縁部に当接するのではなく、頭部が切欠きR1〜R6の側面に当接して、キャップの内側に付着した全血検体に、キャップから離反する力が付与される。この変更例によれば、ローラRが1回転するうちに、検体容器を6回揺らすことができるため、全血検体の除去効率を高めることができる。
【0156】
また、ローラの外周面に凹部や突部を形成する構成に代えて、ローラ自身の形状を楕円形にしても良い。こうすると、ローラの回転に伴って、検体容器Tが長手方向に直交する方向に振動するため、キャップの内側に付着した全血検体に振動を付与することができる。したがって、楕円形の長軸と短軸の比を調整し、あるいは、ローラの回転速度を調整することにより、キャップの内側に付着した全血検体を除去することができる。
【0157】
また、ローラを用いる代わりに、検体容器Tの底部を把持して検体容器Tの頭部を振り動かす構成を用いても良い。
【0158】
また、上記実施の形態では、特定キャップCPを色により検出したが、形状に基づいて特定キャップCPを検出しても良い。この場合、たとえば、キャップを撮像する撮像部を測定ユニット3内に配置し、撮像したキャップの画像を解析することにより、検体容器Tに装着されたキャップが特定キャップCPであることが検出される。あるいは、特定キャップCPに目印を付与し、この目印を検出することにより、特定キャップを検出するようにしても良い。
【0159】
また、検体除去動作時における検体容器の変位方向は、検体容器の長手方向に交差する方向に限らず、検体容器の長手方向に平行な方向であっても良い。たとえば、検体容器を検体容器ホルダHから持ち上げた後、検体容器ホルダH内に落下させ、検体容器Tの底部
を検体容器ホルダHの設置面H3に打ちつけることにより、キャップの内側に付着した全血検体に蓋から離れる力を付与するようにしても良い。あるいは、自然落下ではなく、鉛直下方向に力を付与して、検体容器Tを検体容器ホルダH内に落下させても良い。具体的には、ハンド部によって検体容器Tを把持して上方に持ち上げ、把持を解除することで検体容器TをホルダH内に落下させ、底に打ち付けることで力を付与してもよい。あるいは、検体容器の頭部をバネなどの弾性体で弾性的に牽引し、牽引を解除することで頭部を急速に動かして慣性力を付与してもよい。あるいは、偏心モータで検体容器に振動を付与してもよい。
【0160】
また、上記実施の形態では、検体容器Tを転倒攪拌、つまり、底部が頭部よりも高くなるように検体容器を攪拌する形態を示したが、検体容器を動かして全血検体を攪拌するものであれば、種々の変更を伴い得る。例えば、検体容器を直立状態から水平状態まで振り子運動させる形態であっても、振り子運動の速度が十分に速ければ、全血検体を十分に攪拌することができる。また、検体容器をハンドで掴んで攪拌する形態に限らず、検体容器を保持したラックを転倒させることで攪拌する形態でもよい。また、検体容器を上下に動かす形態でもよい。
【0161】
この他、本発明の実施の形態は、特許請求の範囲に示された技術的思想の範囲内において、適宜、種々の変更が可能である。
【符号の説明】
【0162】
1 … 血球計数装置
3 … 測定ユニット
31 … 検体容器搬送部
32 … ピアサ
32d、32e … 溝
401 … CPU
B2 … バーコードユニット
B21 … ローラ
B21a、B21b、B21f … 切欠き
B21e、B21g … 突部
CS … カラーセンサユニット
CP … 特定キャップ
F … 把持ユニット
F15a、F15b … ハンド部
H … 検体容器ホルダ
H1 … 容器収容部
T … 検体容器
【技術分野】
【0001】
本発明は、全血検体に含まれる血球を計数する血球計数装置および血球計数方法に関する。
【背景技術】
【0002】
従来、全血検体を収容した検体容器を密封する蓋(キャップ)に吸引管を貫通させて、検体容器から全血検体を吸引し、吸引した全血検体に含まれる血球を計数する血球計数装置が知られている。全血検体に含まれる血球成分は、放置しておくと沈降するため、全血検体を吸引する前に、検体容器内の全血検体の濃度を均一にするために検体容器の攪拌が必要となる。この場合、検体容器の攪拌は、ユーザが手作業により行い、あるいは、血球計数装置内に配された攪拌のための機構により、血球計数装置において行われる。
【0003】
特許文献1には、全血検体を収容した検体容器を攪拌する機構を備えた装置が開示されている。この装置は、水平に設けられたシャフトと、シャフトの周方向に回転可能に設けられた回転ヘッドと、回転ヘッドの先端に設けられ、検体容器を両側から把持するピックアップ機構と、を備えている。装置は、直立状態の検体容器の中腹部分をピックアップ機構によって把持し、シャフトに対して周方向に回転ヘッドを360度回転させることにより、把持部分を支点に検体容器を1回転させ、検体容器内部の全血検体を攪拌する。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2002−71699号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、上記のような方法によって全血検体を攪拌すると、検体容器の蓋の内側に全血検体の一部が残留することがある。この状態で蓋に吸引管を貫通させると、蓋の内側に付着した全血検体が外側に噴き出してしまうおそれがあった。
【0006】
本発明は、かかる課題に鑑みてなされたものであり、全血検体を吸引する前に、蓋の内側に付着した全血検体を円滑に除去可能な血球計数装置および血球計数方法を提供することを目的とする。
【課題を解決するための手段】
【0007】
本発明の第1の態様は、蓋により密封された検体容器内から全血検体を吸引し、全血検体に含まれる血球を計数する血球計数装置に関する。本態様に係る血球計数装置は、前記検体容器を動かして前記検体容器内の全血検体を攪拌する検体攪拌部と、前記検体攪拌部による攪拌後に前記検体容器の前記蓋に吸引管を貫通させて前記検体容器内の全血検体を吸引する検体吸引部と、前記検体吸引部によって吸引された全血検体に含まれる血球を計数する検出部と、前記検体攪拌部による攪拌後に、前記検体容器を立たせた状態で、前記蓋の内側に付着した全血検体が前記蓋から離反するように、前記検体容器に力を付与する力付与手段と、を有する。
【0008】
本態様に係る血球計数装置によれば、全血検体の攪拌動作によって蓋の内側に全血検体が付着したとしても、全血検体が吸引される前に、力付与手段によって蓋の内側に付着した全血検体が除去されるため、吸引の際に吸引管を蓋に貫通させても、貫通個所から蓋の上部に全血検体が漏れ出すことがない。
【0009】
本態様に係る血球計数装置において、前記力付与手段は、前記検体容器に力を付与することにより前記検体容器を移動させて、前記蓋の内側に付着した全血検体に前記蓋から離反する力を付与するよう構成され得る。この構成によれば、検体容器の移動により、蓋の内側に付着した全血検体に、蓋から離反する力を付与される。
【0010】
この場合、前記力付与手段は、前記検体容器に力を付与することにより、前記検体容器の長手方向に交差する方向に前記検体容器を移動させるよう構成され得る。
【0011】
さらに、この場合、血球計数装置は、少なくとも前記頭部が揺れる状態で前記検体容器を立たせた状態で支持する検体容器支持部をさらに備え、前記力付与手段は、前記検体容器支持部に前記検体容器が支持された状態において、前記検体容器に前記検体容器の長手方向に交差する方向の力を付与するよう構成され得る。この構成によれば、力付与手段によって力が付与されることにより、検体容器が頭部を振るように移動するため、蓋の内側に付着した全血検体に対して、蓋から離反する力が付与される。これにより、蓋の内側に付着した全血検体を円滑に蓋から離反させることができる。
【0012】
この場合、前記力付与手段は、前記検体容器の外周面に接触して前記検体容器の長手方向に平行な軸の周りに前記検体容器を回転させるローラと、前記検体容器を回転可能な状態で前記検体容器を前記ローラに押し付ける付勢部を含み、前記ローラの外周は、前記ローラの回転軸からの距離が不安定となるように形成され得る。このとき、前記力付与手段は、前記ローラを前記検体容器の外周面に接触させた状態で、前記ローラを少なくとも一回転させる。
【0013】
こうすると、ローラの回転により、検体容器が、検体容器の長手方向に交差する方向に振動し、且つ、ローラの回転に伴って検体容器の長手方向に平行な軸の周りに検体容器が回転する。このため、振動による慣性力と回転による遠心力が、蓋の内側に付着した全血検体に付与されるため、蓋の内側から全血検体をさらに円滑に除去することができる。
【0014】
この場合、前記ローラは、前記ローラの外周面に設けられ、前記ローラの回転軸からの距離が段状に変化する段差を含み、当該段差を前記検体容器が通過する際に、前記検体容器の長手方向に交差する方向に、前記検体容器が移動するよう構成され得る。こうすると、段差が検体容器に到来したときに、検体容器を急激に移動させることができ、全血検体を円滑に除去することができる。
【0015】
ここで、血球計数装置が、前記検体容器の長手方向に平行な軸の周りに前記検体容器を回転させながら前記検体容器に付されたバーコードを読み取るバーコードリーダを備える場合、当該バーコードリーダの前記検体容器を回転させるためのローラを前記力付与手段のローラとして共用することができる。こうすると、全血検体除去のためのローラを、別途、設ける必要がないため、力付与手段の構成を簡素化することができる。
【0016】
なお、この構成において、前記バーコードリーダは、前記ローラの外周面を前記検体容器の外周面に当接させて前記検体容器を第1速度で回転させつつ前記バーコードを読み取る第1工程と、前記第1速度よりも高速で前記検体容器を回転させて前記蓋の内側に付着した全血検体を除去する第2工程を含む。こうすると、バーコードの読み取りを適正に行いながら、全血検体の除去を円滑に行うことができる。
【0017】
上記構成では、前記検体容器支持部に前記検体容器が当接することにより、前記検体容器の移動が規制されるよう構成するのが望ましい。あるいは、前記ローラの外周面に前記検体容器が当接することにより、前記検体容器の移動が規制されるよう構成するのが望ま
しい。こうすると、所定の速度で移動する検体容器の移動が急激に停止されるため、当該停止時に、蓋の内側に付着した全血検体に大きな力を付与することができる。これにより、全血検体を効果的に除去することができる。
【0018】
本態様に係る血球計数装置は、前記検体攪拌部によって全血検体が攪拌された検体容器を直立状態で保持して前記検体吸引部における吸引位置に搬送する搬送部をさらに備え得る。この場合、前記力付与手段は、前記搬送部における前記検体容器の搬送路上の所定の位置において、前記検体容器に力を付与する構成とされ得る。
【0019】
また、本態様に係る血球計数装置は、検体容器について特定の蓋を検出する蓋検出部をさらに備え、前記力付与手段は、前記蓋検出部により前記特定の蓋が検出された検体容器に対して検体除去のための作用を付与し、前記蓋検出部により前記特定の蓋が検出されなかった検体容器に対しては検体除去のための作用の付与を中止するよう構成され得る。こうすると、検体除去を行う必要のない検体容器に対して無駄に検体除去作用が付与されるのを回避することができる。
【0020】
なお、この構成において、蓋が装着されておらず、検体容器の上部が開放された検体容器も、「前記特定の蓋が検出された検体容器」として検出されない。すなわち、この構成では、蓋が装着されていない検体容器にも検体除去作用が付与されないため、蓋が装着されていない検体容器に力が付与されることにより、検体容器の上部から全血検体が飛び出すことを回避することができる。
【0021】
この場合、前記蓋検出部は、検体容器に付された蓋の色を検出するカラーセンサを含み、前記カラーセンサにより検出された色が前記特定の蓋の色に対応するかに基づいて、検体容器の蓋が特定の蓋であることを検出するよう構成され得る。
【0022】
なお、本態様に係る血球計数装置は、前記検体容器内の圧力を前記検体容器外部の圧力と等しくするための溝が、前記吸引管の外周面に、前記吸引管の長手方向に沿って形成されている場合に、特に顕著な効果を奏し得るものである。すなわち、吸引管にこのような溝が形成されていると、吸引管を蓋に貫通させたときに、蓋の内側に付着した全血検体が溝から外部に漏れ出すことが起こり易い。本態様に係る血球計数装置によれば、蓋の内側に付着した全血検体が除去されるため、吸引管を蓋に貫通させても、溝から全血検体が外部に漏れ出すことを防止できる。
【0023】
本発明の第2の態様は、蓋により密封され内部の全血検体が攪拌された検体容器内から全血検体を吸引し、吸引された全血検体に含まれる血球を計数する血球計数装置に関する。本態様に係る血球計数装置は、前記検体容器の前記蓋に吸引管を貫通させて前記検体容器内の全血検体を吸引する検体吸引部と、前記検体吸引部によって吸引された全血検体に含まれる血球を係数する検出部と、前記検体吸引部による吸引前に、前記検体容器を立たせた状態で、前記蓋の内側に付着した全血検体が前記蓋から離反するように、前記検体容器に力を付与する力付与手段とを有する。
【0024】
本態様に係る血球計数装置によれば、全血検体の攪拌時に蓋の内側に全血検体が付着したとしても、全血検体が吸引される前に、蓋の内側から全血検体を除去することができるため、吸引の際に吸引管を蓋に貫通させても、貫通個所から蓋の上部に全血検体が漏れ出すことがない。
【0025】
本発明の第3の態様は、蓋により密封され内部の全血検体が攪拌された検体容器内から全血検体を吸引し、吸引された全血検体に含まれる血球を計数する血球計数装置に関する。本態様に掛かる血球計数装置は、前記検体容器の前記蓋に吸引管を貫通させて前記検体
容器内の全血検体を吸引する検体吸引部と、前記検体吸引部によって吸引された全血検体に含まれる血球を計数する検出部と、を備え、前記検体吸引部による吸引前に、前記検体容器に衝撃を加えることにより、前記蓋の内側に付着した全血検体が前記蓋から離反させる。
【0026】
本態様に係る血球計数装置によれば、全血検体の攪拌時に蓋の内側に全血検体が付着したとしても、全血検体が吸引される前に、検体容器に衝撃が加えられることにより、蓋の内側から全血検体が除去されるため、吸引の際に吸引管を蓋に貫通させても、貫通個所から蓋の上部に全血検体が漏れ出すことがない。
【0027】
本発明の第4の態様は、蓋により密封された検体容器内から全血検体を吸引し、吸引された全血検体に含まれる血球を計数する血球計数方法に関する。本態様に係る血球計数方法は、前記検体容器を動かして前記検体容器内の全血検体を攪拌する攪拌工程と、前記検体容器を立たせた状態で、前記蓋の内側に付着した全血検体が前記蓋から離反するように、前記検体容器に力を付与する力付与工程と、前記検体容器の前記蓋に吸引管を貫通させて前記検体容器内の全血検体を吸引する吸引工程と、前記吸引工程において吸引された全血検体に含まれる血球を計数する検出工程と、を有する。
【0028】
本態様によれば、上記第1の態様と同様の効果が奏され得る。
【発明の効果】
【0029】
以上のとおり、本発明によれば、全血検体を吸引する前に、蓋の内側に付着した全血検体を円滑に除去可能な血球計数装置および血球計数方法を提供することができる。
【0030】
本発明の効果ないし意義は、以下に示す実施の形態の説明により更に明らかとなろう。ただし、以下に示す実施の形態は、あくまでも、本発明を実施化する際の一つの例示であって、本発明は、以下の実施の形態により何ら制限されるものではない。
【図面の簡単な説明】
【0031】
【図1】実施の形態に係る血球計数装置の外観を示す斜視図である。
【図2】実施の形態に係る検体容器、検体容器を密封するキャップおよび検体ラックの構成を示す図である。
【図3】実施の形態に係る搬送ユニットおよび測定ユニットを上側から見た場合の構成を示す平面図および検体容器ホルダの構成を模式的に示す図である。
【図4】実施の形態に係る検体容器の攪拌動作、検体容器ホルダに対する検体容器のセット動作および特定キャップの検出動作を模式的に示す図である。
【図5】実施の形態に係る把持ユニットの構成を示す図である。
【図6】実施の形態に係るバーコードユニットの構成を示す図である。
【図7】実施の形態に係るバーコードユニットの動作を示す図である。
【図8】実施の形態に係るピアサの構成を示す図である。
【図9】実施の形態に係る搬送ユニットおよび測定ユニットの構成を示す図である。
【図10】実施の形態に係る情報処理ユニットの構成を示す図である。
【図11】実施の形態に係る測定ユニットの動作を示すフローチャートである。
【図12】変更例に係る血球計数装置の外観を示す斜視図である。
【図13】変更例に係る測定ユニットの動作を示すフローチャートである。
【図14】変更例に係る測定ユニットの動作を示すフローチャートである。
【図15】変更例に係るローラの構成を示す図である。
【図16】変更例に係るローラの構成を示す図である。
【発明を実施するための形態】
【0032】
本実施の形態は、全血検体に含まれる血球を計数する血球計数装置に本発明を適用したものである。
【0033】
以下、本実施の形態に係る血球計数装置について、図面を参照して説明する。
【0034】
図1は、血球計数装置1の外観を示す斜視図である。本実施の形態に係る血球計数装置1は、搬送ユニット2と、測定ユニット3と、情報処理ユニット4から構成されている。
【0035】
搬送ユニット2は、測定ユニット3の前方に配置されており、右テーブル21と、左テーブル22と、右テーブル21と左テーブル22とをつなぐラック搬送部23とを備えている。右テーブル21と左テーブル22は、10個の保持部が形成された検体ラックLを収容することができる。
【0036】
図2(a)〜(c)は、それぞれ、検体容器Tと、ゴム製のキャップCPと、検体ラックLの構成を示す図である。
【0037】
図2(a)を参照して、検体容器Tは、透光性を有するガラスまたは合成樹脂により構成された管状容器であり、上端が開口している。検体容器Tの外側面には、バーコードラベルBL1が貼付されている。バーコードラベルBL1には、個々の検体を識別可能な検体IDを含むバーコードが印刷されている。検体容器Tは、患者から採取された全血検体を収容しており、上端の開口は、後述するピアサ32が貫通可能なゴム製のキャップにより密封されている。
【0038】
図2(b)は、キャップの一例を示す図である。図2(b)には、キャップの中心軸を通る平面によってキャップを切断したときの断面が示されている。
【0039】
図2(b)を参照して、例示されたキャップCPは、円柱状の頭部CP1と円柱状の胴部CP2を有している。頭部CP1の上面には円形の凹部CP3が形成され、胴部CP2の下面には円柱状の凹部CP4が形成されている。また、凹部CP4の内側面には、所定の深さ位置にリング状の突部CP5が形成されている。キャップCPは、中心軸に対して対称な形状を有している。
【0040】
図2(b)に示す如く、かかるキャップCPは、凹部CP4が深く、且つ、所定の深さ位置にリング状の突部CP5が形成されている。このため、このキャップCPが検体容器Tの密封に用いられると、後述の攪拌動作によって、キャップCPの内側、すなわち、凹部CP4の底に全血検体が残り易い。
【0041】
検体容器Tの密封には、図2(b)に示すキャップCP以外のキャップも用いられ得る。キャップCP以外のキャップは、内側の凹部が浅く幅広である等、キャップCPに比べてキャップの内側に全血検体が残り難い形状となっている。なお、図2(b)に示すキャップCPは、乳白色を有し、色によって他のキャップと識別可能となっている。以下、図2(b)に示すキャップCPを、特に、「特定キャップCP」と称する。
【0042】
図2(c)を参照して、検体ラックLには、検体容器Tを垂直に保持することが可能な保持部L01〜L10が形成されている。検体ラックLの後方の側面には、バーコードラベルBL2が貼付されている。バーコードラベルBL2には、ラックIDを含むバーコードが印刷されている。
【0043】
図1に戻り、搬送ユニット2は、ユーザが右テーブル21に載置した検体ラックLを収容する。また、搬送ユニット2は、右テーブル21に収容している検体ラックLを搬送し
、検体容器Tが測定ユニット3に供給されるよう、検体ラックLをラック搬送部23の所定位置に位置付ける。さらに、搬送ユニット2は、ラック搬送部23上にある検体ラックLを搬送して、左テーブル22に回収する。
【0044】
測定ユニット3は、ラック搬送部23の所定の位置に検体容器Tが位置付けられると、ハンド部F15a、F15b(図3参照)により検体ラックLからこの検体容器Tを取り出して測定ユニット3の内部に搬送する。測定ユニット3は、この検体容器Tに収容された全血検体を測定ユニット3内で測定し、全血検体に含まれる血球を計数する。測定が終了すると、測定ユニット3は、この検体容器Tを再び元の検体ラックLの保持部に戻す。
【0045】
情報処理ユニット4は、入力部41と表示部42を備えている。また、情報処理ユニット4は、搬送ユニット2と、測定ユニット3と、ホストコンピュータ(図示せず)と、通信ネットワークを介して通信可能に接続される。情報処理ユニット4は、搬送ユニット2と測定ユニット3の動作を制御し、測定ユニット3で行われた測定結果に基づいて分析を行い、分析結果をホストコンピュータに送信する。
【0046】
図3は、搬送ユニット2と測定ユニット3を上側からみたときの構成を示す平面図である。なお、右テーブル21、左テーブル22およびラック搬送部23の所定の位置には、検体ラックLおよび検体容器Tを検出するための各種センサが配置されているが、これらセンサは、図示省略されている。
【0047】
右テーブル21には、検体ラックLをラック搬送部23の右端位置に送り込むためのラック送込機構21aが設けられている。また、測定ユニット3には、ラック搬送部23の搬送路上の読取位置P1において、検体容器TのバーコードラベルBL1を読み取るためのバーコードリーダB1aを含むバーコードユニットB1が設置されている。さらに、測定ユニット3には、ラック搬送部23の搬送路上の取込位置P2において、検体容器Tを検体ラックLから上方向に抜き取るハンド部F15a、F15bが設けられている。ハンド部F15a、F15bは、検体容器Tの頭部(キャップ)を前後方向に挟持して、検体容器Tを上方向に抜き取り、抜き取った検体容器Tを左右方向に揺動させる。これにより、検体容器T内の全血検体が攪拌される。
【0048】
なお、ハンド部F15a、F15bは、後述する把持ユニットFの一部を構成するものである。把持ユニットFの構成は、追って、図5を参照して説明する。
【0049】
また、取込位置P2の近傍には、検体容器Tに装着されたキャップが特定キャップCPであるかを検出するためのカラーセンサユニットCSが設置されている。カラーセンサユニットCSは、白色光を発光する白色光源と、カラーセンサとを備えている。白色光源は、キャップを把持するハンド部F15a、F15bの間から白色光をキャップに照射する。カラーセンサは、白色光が照射されたキャップの色をハンド部F15a、F15bの間から検出し、赤色、青色、緑色の輝度レベルを示すデータを出力する。
【0050】
さらに、測定ユニット3には、ハンド部F15a、F15bによって抜き取られた検体容器Tを測定ユニット3内に搬送する検体容器搬送部31が設けられている。検体容器搬送部31は、検体容器ホルダHと、検体容器ホルダHを、一点鎖線で示す範囲において、前後方向に搬送する搬送機構(図示せず)とを備えている。
【0051】
図3(b)は、検体容器ホルダHの構成を示す図である。検体容器ホルダHは、円柱状の穴からなる容器収容部H1を備え、この容器収容部H1のX軸正側に、容器収容部H1を外部に開放する切欠きH2を有する。切欠きH2は、後述のバーコードユニットB2によって検体容器TのバーコードラベルBL1を読み取るために形成されている。さらに、
容器収容部H1の底に、球面状に凹んだ設置面H3が形成されている。
【0052】
容器収容部H1の径は、検体容器Tの径よりも大きくなっている。上側から容器収容部H1に検体容器Tが挿入されることにより、検体容器Tが、所定のクリアランスをもってホルダHに支持される。このとき、検体容器Tの底面は、球面上の設置面H3上に載置される。このため、検体容器Tの底部は、X−Y平面に平行な方向の移動が規制される。また、容器収容部H1の径は検体容器Tの径よりも大きいため、検体容器Tは、容器収容部H1の上端位置において、X−Y平面に平行な方向に移動可能である。したがって、検体容器Tは、頭部が揺れる状態で、検体容器ホルダHに支持される。
【0053】
図4は、検体容器Tの攪拌からキャップの色の検出までの動作を模式的に示す図である。なお、図4(b)、(c)には、便宜上、検体容器ホルダHが、中心軸をとおり且つX−Z平面に平行な平面で切断された断面図によって示されている。
【0054】
検体容器Tがハンド部F15a、F15bによって検体ラックLから抜き取られると、図4(a)に示すように、ハンド部F15a、F15bが、回転軸F11を軸として、X−Z平面に平行な反時計方向に120度程度回転される。次に、ハンド部F15a、F15bが、回転軸F11を軸として、時計方向に回転される。以上の動作が、複数回繰り返される。これにより、検体容器Tの底部が頭部よりも高くなるように検体容器Tが動かされ、検体容器T内の全血検体が十分に攪拌される。なお、このように検体容器Tが転倒状態になるまで揺動されると、検体容器Tが直立状態に戻されても、キャップの形状や全血検体の粘性によっては、キャップの内側に全血検体が残ることがある。
【0055】
こうして攪拌動作が終了すると、図4(b)、図4(c)に示すように、ハンド部F15a、F15bが下方向(Z軸負方向)に移動されて、検体容器Tが検体容器ホルダHの容器収容部H1に収容される。この状態において、ハンド部F15a、F15bによる検体容器Tの把持が一旦解除されて、検体容器Tの底面が設置面H3上に載置され、その後、再び、ハンド部F15a、F15bによって検体容器Tの頭部が把持される。この状態において、カラーセンサユニットCSの白色光源から白色光が検体容器Tのキャップに照射され、キャップの色がカラーセンサによって検出される。ハンド部F15a、15bによって頭部を把持した状態で白色光源を照射するため、検体容器Tが傾いたまま色検出動作が行われることによる誤検出を回避できる。
【0056】
こうして、キャップの色検出動作が終了すると、ハンド部F15a、F15bによる検体容器Tの把持が解除され、ハンド部F15a、F15bが上方向(Z軸正方向)に移動する。これにより、検体容器ホルダHの後方への移動が可能となる。
【0057】
図3(a)に戻り、測定ユニット3には、検体容器搬送部31の搬送路上の読取位置P3において、検体容器TのバーコードラベルBL1を読み取るためのバーコードリーダB2aを含むバーコードユニットB2が設置されている。さらに、測定ユニット3には、ラック搬送部23の搬送路上の吸引位置P4において、検体容器Tから全血検体を吸引するためのピアサ32が配置されている。
【0058】
取込位置P2において検体容器ホルダHに支持された検体容器Tは、読取位置P3に搬送されてバーコードラベルBL1が読み取られる。その後、検体容器Tは、吸引位置P4に搬送される。吸引位置P4において、検体容器Tに装着されたキャップにピアサ32が突き刺され、ピアサ32により検体容器Tから全血検体が吸引される。吸引された全血検体は、測定ユニット3内の測定部(図示せず)において測定される。
【0059】
なお、読取位置P3においてバーコードラベルBL1が読み取られる際に、後述のよう
に、バーコードユニットB2において、適宜、キャップの内側に付着した全血検体を除去する処理が行われる。
【0060】
吸引位置P4において全血検体の吸引が終了すると、検体容器ホルダHが前方に移動され、検体容器Tが再び取込位置P2に位置付けられる。取込位置P2において、検体容器Tは、ハンド部F15a、F15bにより上方向に取り出される。この状態で、検体容器ホルダHが後方に移動され、その後、ハンド部F15a、F15bが下方向(Z軸負方向)に移動される。これにより、検体容器Tが、ラック搬送部23に位置付けられている検体ラックLの元の保持部に戻される。
【0061】
こうして、検体ラックLに保持されている全ての検体容器Tの全血検体の測定が終了すると、検体ラックLは、ラック搬送部23の左端位置まで送られる。しかる後、検体ラックLは、ラック押出し機構23aにより、左テーブル22の後方位置に押し出される。左テーブル22の後方位置に位置付けられた検体ラックLは、ラック送込機構22aにより、左テーブル22の前方に搬送される。
【0062】
図5は、検体容器Tを検体ラックLから抜き取る把持ユニットFの構成を示す図である。図5(a)は、把持ユニットFを上側から(Z軸負方向に)見たときの平面図であり、同図(b)は、把持ユニットFを右側から(X軸正方向に)見たときの側面図である。
【0063】
図5(a)、(b)を参照して、把持ユニットFは、支持体F10と、ベースF20を備えている。支持体F10には、回転軸F11と、エアシリンダF12と、支持板F13、F14と、ハンド部F15a、F15bと、軸F16と、バネF17が装着されている。
【0064】
支持体F10は、回転軸F11の周りに回転可能に、ベースF20に支持されている。回転軸F11は、支持体F10のフランジ部F10a、F10bに固着されている。さらに、回転軸F11の一端は、ベースF20のフランジ部F20aに回転可能に支持され、他端は、ベースF20に装着されたステッピングモータF18の駆動軸に固定されている。ステッピングモータF18が駆動されると、回転軸F11の周りに支持体F10が回転し、これと一体的に、エアシリンダF12と、支持板F13、F14と、ハンド部F15a、F15bと、軸F16と、バネF17が回転する。
【0065】
回転軸F11には、図3(a)に示したハンド部F15a、F15bが通されている。ハンド部F15aは、回動軸F11に沿って移動可能である。ハンド部F15a、F15bには、それぞれ、支持板F14、F13が固定されている。支持板F13は、支持体F10に装着された軸F16に固定されている。支持板F14は、エアシリンダF12から突出した軸F12aに連結されている。また、支持板F14の孔が軸F16に通されている。エアシリンダF12は、軸F12aをY軸方向に移動させる。エアシリンダF12が駆動されると、その駆動力が軸F12aと支持板F14を介してハンド部F15aに伝達され、ハンド部F15aが、回転軸F11に沿って移動する。
【0066】
バネF17の両端は、支持板F13、F14に固定されている。バネF17は、伸長作用により、支持板F14をY軸負方向に押している。ステッピングモータF18は、ベースF20に設置されている。上記のとおり、ステッピングモータF18の駆動軸には、回転軸F11のY軸方向の端部が固定されている。
【0067】
ベースF20をZ軸方向に移動させるための構成として、測定ユニット3の内壁33aに、プーリF21a、F21bが、Y軸を中心として回転可能となるよう設置されている。また、内壁33aには、ステッピングモータF23と、ガイド33bが設置されている
。プーリF21aは、ステッピングモータF23の軸にY軸を中心として回転可能となるよう設置されている。ベルトF22は、プーリF21a、F21bに掛け渡されており、ベースF20は、ベルトF22に固定されている。ベースF20には、受け部F24が設置されている。これにより、ベースF20は、受け部F24を介して、ガイド33bに沿ってZ軸方向に移動可能となる。
【0068】
図5(a)、(b)に示す状態から、エアシリンダF12により軸F12aがバネF17に逆らってY軸正方向に移動されると、ハンド部F15aが回転軸F11に沿ってY軸正方向に移動する。これにより、ハンド部F15a、F15bの間に位置付けられた検体容器Tの頭部(キャップ)が、ハンド部F15a、F15bにより把持される。他方、ハンド部F15a、F15bによりキャップが把持されている状態から、エアシリンダF12により軸F12aがY軸負方向に移動されると、ハンド部F15aが同図(a)の位置に位置付けられ、キャップの把持が解除される。
【0069】
また、ステッピングモータF18が駆動されると、回転軸F11がY軸を中心として回転し、支持体F10と共にハンド部F15a、F15bがY軸を中心として回転させられる。さらに、ステッピングモータF23が駆動されると、ベルトF22が移動し、ベースE20がZ軸方向に移動する。
【0070】
こうして、図4を参照して説明したように、把持ユニットFにより、検体ラックLから検体容器Tが抜き出され、検体容器Tが転倒攪拌される。また、把持ユニットFにより、転倒攪拌が終了した検体容器Tは、検体容器ホルダHにセットされ、測定が終了した検体容器Tは、検体容器ホルダHから抜き出され、検体ラックLの元の保持位置に戻される。
【0071】
図6は、バーコードユニットB2の詳細な構成を示す図である。なお、バーコードユニットB1は、バーコードユニットB2に比べて、ローラB21に切欠きB21aが形成されていない点においてのみ相違しているため、ここでは説明を省略する。
【0072】
図6(a)は、ローラB11とローラB21の近傍を上側から見たときの平面図であり、同図(b)は、バーコードユニットB2を後側から(Y軸負方向に)見たときの側面図である。
【0073】
図6(a)、(b)を参照して、バーコードユニットB2は、支持体B10と、支持体B20と、ベースB30を備えている。支持体B10には、2つのローラB11と、軸B15と、遮光板B18が装着されている。また、支持体B10は、ベースB30に設置されX軸方向に伸びたガイド(図示せず)により、X軸方向に移動可能となるよう支持されている。ベースB30は、測定ユニット3内に固定されている。ベースB30には、プーリB13a、B13bと、ステッピングモータB14と、上述のバーコードリーダB2aと、発光部と受光部からなる透過型のセンサB31を支持するセンサ台B32が設置されている。センサ台B32は、ベースB30のX−Z平面に平行な側面から、Y軸正方向に突出するように設置されている。
【0074】
2つのローラB11は、支持体B10によってZ軸を中心として回転可能となるよう支持されている。ベルトB12は、プーリB13a、B13bに掛け渡されている。プーリB13aは、ステッピングモータB14の軸にZ軸を中心として回転可能となるよう設置され、プーリB13bは、ベースB30にZ軸を中心として回転可能となるよう設置されている。ステッピングモータB14が駆動されることにより、ベルトB12がプーリB13a、B13bの周りを移動する。
【0075】
軸B15には、支持部B16とバネB17が通されている。支持部B16は、軸B15
に沿ってY軸方向に所定幅だけ移動可能となっている。支持部B16には、鍔部B16aが形成されており、鍔部B16aは、ベルトB12に固定されている。バネB17は、伸長作用により、支持部B16をX軸正方向に押している。
【0076】
ここで、ベルトB12がプーリB13a、B13bの周りを移動すると、鍔部B16aを含む支持部B16はX軸方向に移動する。鍔部B16aがX軸負方向に移動されると、支持部B16がバネB17をX軸負方向に押し、支持体B10がX軸負方向に移動する。他方、鍔部B16aがX軸正方向に移動されると、支持部B16が、支持体B10のX軸正方向側のY−Z平面に平行な側面をX軸正方向に押すことにより、支持体B10がX軸正方向に移動する。
【0077】
遮光板B18には、Y軸に垂直な平面である遮光部B18a、B18bが形成されている。遮光部B18a、B18bは、支持体B10がX軸方向に移動されると、センサB31の発光部と受光部の間に位置付けられるよう構成されている。バーコードリーダB2aが、対象となる検体容器Tの正面(X軸正方向)に位置付けられると、図6(a)、(b)に示す如く、センサB31の発光部と受光部の間に遮光部B18aが位置付けられた状態から、支持体B10がX軸負方向に移動される。
【0078】
このように支持体B10がX軸負方向に移動されると、2つのローラB11が検体容器Tの側面に当接する。このとき、支持部B16は、ベルトB12の動きに合わせて、バネB17を縮めながらX軸負方向へ移動するものの、支持体B10はさらにX軸負方向へ移動することがない。このため、支持部B16が所定の幅だけ移動したときに、遮光部B18bがセンサB31の発光部と受光部の間に位置付けられなければ、検体容器ホルダHに検体容器Tが保持されていることが分かる。
【0079】
他方、検体容器ホルダHに検体容器Tが保持されていない場合、支持体B10が所定の幅だけX軸負方向に移動すると、遮光部B18bがセンサB31の発光部と受光部の間に位置付けられる。これにより、検体容器ホルダHに検体容器Tが保持されていないことが分かる。
【0080】
このように支持体B10を駆動するための機構が構成されると、支持体B10がX軸方向に移動される場合に、ステッピングモータB14から得られる支持部B16の移動幅と、センサB31の出力信号により、バーコードリーダB2aの正面に位置付けられた検体容器ホルダHにおける検体容器Tの有無が検知される。また、検体容器Tが保持されていることが検知されると、バーコードリーダB2aにより検体容器Tの検体IDが読み取られる。
【0081】
図6(b)を参照して、支持体B20には、ローラB21と、軸B22と、プーリB24bが装着されている。支持体B20は、ベースB30にネジ止めされている。
【0082】
ローラB21には、外周面の一部に切欠きB21aが形成されている。この切欠きB21aは、ローラB21aの回転時に先に検体容器Tに到達する方の端縁が、急激に、ローラB21aの中心方向に落ち込んでいる。すなわち、切欠きB21aのこの端縁は、ローラB21の中心に向かって段状に凹んでいる。切欠きB21aの反対側の端縁は、ローラB21の円周面へと滑らかに繋がる曲面となっている。
【0083】
また、ローラB21には、Z軸方向に貫通する孔が形成されている。軸B22は、この孔を貫通してローラB21を支持している。また、軸B22の両端は、支持体B20により、Z軸を中心として回転可能となるよう支持されている。ベルトB23は、プーリB24a、B24bに掛け渡されている。プーリB24aは、ステッピングモータB25の軸
にZ軸を中心として回転可能となるよう設置され、プーリB24bは、支持体B20と支軸B22に、Z軸を中心として回転可能となるよう設置されている。ステッピングモータB25は、ベースB30に設置されている。
【0084】
このようにローラB21を駆動するための機構が構成されると、ステッピングモータB25が駆動されることにより、ベルトB23がプーリB24a、B24bの周りを移動する。これにより、軸B22とローラB21がZ軸を中心として回転される。
【0085】
バーコード読取動作時には、検体容器ホルダHがバーコードユニットB2正面の読取位置P3に位置付けられた後、ステッピングモータB14が駆動され、支持体B10がX軸負方向に移動される。このとき、検体容器ホルダHに検体容器Tが支持されていると、2つのローラB11が検体容器Tの側面に当接し、2つのローラB11とローラB21によって検体容器Tが挟まれる。この状態から、さらに、ステッピングモータB14が駆動されると、バネB17による付勢によって、2つのローラB11が検体容器Tの側面に押し付けられる。その後、ステッピングモータB14が停止され、次に、ステッピングモータB25が駆動される。これにより、ローラB21が回転し、2つのローラB11とローラB21によって挟まれた検体容器Tが回転する。この状態で、バーコードリーダB2aによって、検体容器Tに貼付されたバーコードラベルBL1が読み取られる。
【0086】
図7は、ローラB21が回転したときのバーコードユニットB2の動作を模式的に示す図である。図7(a)〜(c)は、ローラB21が各回転位置にあるときの検体容器TとローラB11の状態を示し、図7(d)〜(e)は、それぞれ、ローラB21が図7(a)〜(c)の回転位置にあるときの検体容器Tの状態を示している。なお、図7(d)〜(e)には、便宜上、検体容器ホルダHが、中心軸をとおり且つX−Z平面に平行な平面で切断された断面図によって示されている。
【0087】
ローラB21が図7(a)の回転位置にあるとき、検体容器Tは、図7(d)に示すように、直立状態にある。この場合、ローラB21は、切欠きB21a以外のローラB21の周面に接しており、また、2つのローラB11は、検体容器TのX軸正側の側面を押している。この状態において、ローラB21は、時計方向に回転駆動される。このため、検体容器Tは、ローラB21の回転に伴って、長手方向の軸の周りに、反時計方向に回転する。
【0088】
図7(a)の状態からローラB21の回転が進み、図7(b)のように、ローラB21の切欠きB21aが検体容器Tの位置に到達すると、検体容器Tの頭部が、ローラB11に押されて、X軸負方向に変位する。この場合、切欠きB21aは、円周方向右側の端縁が、急激に、ローラB21aの中心方向に落ち込んでいるため、検体容器Tの頭部は、ローラB11による付勢、すなわち、図6(a)、(b)に示すバネB17による付勢によって、素早くX軸負方向に移動する。ここで、検体容器Tは、上述のように、検体容器ホルダHによって頭部が揺れる状態で支持されているため、図7(e)のように、直立状態から右方向に傾くように移動する。この移動により、検体容器Tは、図7(e)の破線の円で囲んだ箇所が、検体容器ホルダHの容器収容部H1の上端縁に打ち付けられ、検体容器に衝撃が加わる。
【0089】
上記図4(a)に示す攪拌動作によってキャップCPの内側に全血検体が付着している場合、図7(e)の破線円の位置において検体容器Tの移動が唐突に規制されることにより、キャップCPの内側に付着している全血検体に、キャップCPから離反する力が加わる。この力によって、キャップCPの内側から全血検体が検体容器T内に落とされる。なお、図7(e)の状態において、ローラB21は検体容器Tの外周面に当接していないため、検体容器Tの回転は中断状態にある。
【0090】
なお、キャップCPの内側に全血検体が付着している場合、図7(b)の工程においても、キャップCP内側の全血検体に、キャップCPから離反する力が付与される。すなわち、図7(b)の工程では、検体容器TがローラB11に押されて素早く変位するため、この変位によって、キャップCPの内側に付着した全血検体に対して、検体容器Tの変位方向と反対方向の力が加わる。したがって、このときにも、キャップCPの内側に付着した全血検体が、ある程度、検体容器T内に落ちることが期待され得る。
【0091】
その後、ローラB21の回転が進み、図7(c)のように、ローラB21の切欠きB21aが検体容器Tの位置を過ぎると、図7(f)のように、検体容器Tが再び直立状態に戻される。そして、ローラB21の回転に伴って、検体容器Tが、再び、反時計方向に回転を始める。このように、検体容器Tの回転の開始と停止が繰り返されることにより、キャップCPの内側に付着した全血検体には、回転による遠心力と、回転の停止による慣性力も付与される。
【0092】
なお、ローラB21は、後述のように、バーコードラベルBL1の読み取り時には、バーコードラベルBL1の読み取りが適切に行われるよう低速で回転され、キャップCPから全血検体を除去する動作においては、キャップCPの内側から全血検体を除去できるよう高速で回転される。バーコードリーダB2aは、ローラB21が低速で回転する際に、検体容器ホルダHの切欠きH2を介して、検体容器Tに貼付されたバーコードラベルBL1を読み取る。本実施の形態では、ローラB21の、切欠きB21aが形成されていない外周面の周方向の長さが、検体容器Tの外周面の周方向の長さの2倍よりやや長くなるように設定されている。このため、ローラB21が1回転すると、検体容器Tは直立状態において、少なくとも2回転する。したがって、検体容器Tが直立状態で2回転する間に、バーコードリーダB21aによって、バーコードラベルBL1が適正に読み取られ得る。
【0093】
図8(a)、(b)は、それぞれ、ピアサ32の下端を側面から見た場合の拡大図および下側から見た場合の拡大図である。図8(c)は、ピアサ32の胴部分の構成を示す図である。図8(d)は、ピアサ32による吸引動作を示す図である。
【0094】
ピアサ32の内部には上下方向に吸引経路32aが形成されている。ピアサ32の下端近傍において、吸引経路32aは左方向に曲がっており、開口32bを介して外部に開いている。ピアサ32の下端には、Y−Z平面に対して対称な2つの切り込み32cが形成されている。2つの切り込み32cにより、ピアサ32の下端が尖った形状となっている。このようにピアサ32が構成されているため、図8(d)のように、検体容器Tの上側からピアサ32が下降されると、ピアサ32の下端はキャップを突き破って検体容器T内に進入することができる。
【0095】
図8(c)に示すように、ピアサ32のX軸負側の側面には、長手方向に延びる溝32d、32eが形成されている。X−Y平面に平行な面でピアサ32を切断したときの溝32d、32eの形状は、ピアサ32の中心方向に凹んだV字形状となっている。これらの溝32d、32eは、図8(d)のように、ピアサ32を検体容器Tのキャップに突き刺したときに、検体容器Tの内部を外部に連通させて検体容器T内の圧力を大気圧に減圧する役割を担っている。
【0096】
検体容器T内の圧力は、大気圧より高くなっている。これは、検体容器T内に全血検体を収容した後、キャップを検体容器Tに装着するため、キャップを検体容器Tの頭部に被せて押し込む際に、空気が圧縮されることによるものである。このように検体容器T内の圧力が高いまま全血検体の吸引を行うと、全血検体の吸引量が安定しなくなる。溝32d、32eは、このように高くなっている検体容器T内の圧力を、上記のように、大気圧ま
で減圧し、検体吸引時の定量精度を確保するためのものである。しかしながら、溝32d、32eがキャップを通るときには、検体容器T内の空気が、溝32d、32eを通って外部に流出するため、キャップの内側に全血検体が残っていると、空気とともに、全血検体が溝32d、32eを通って外部に漏れ出す場合がある。
【0097】
本実施の形態では、後述のように、キャップにピアサ32を突き刺す前に、適宜、キャップの内側に残っている全血検体を除去する処理が行われるため、キャップにピアサ32を突き刺す際に、溝32d、32eを通って全血検体が外部に漏れ出すことが防止される。
【0098】
図9は、搬送ユニット2と測定ユニット3の構成を示す図である。
【0099】
搬送ユニット2は、駆動部201と、センサ部202と、バーコードユニットB1と、通信部203を備える。
【0100】
駆動部201は、搬送ユニット2内で検体ラックLを搬送するための機構を含んでおり、センサ部202は、搬送ユニット2内の各位置において検体ラックLを検出するためのセンサを含んでいる。バーコードユニットB1は、上述したように、バーコードリーダB1aを含んでいる。
【0101】
通信部203は、情報処理ユニット4と通信可能に接続されている。搬送ユニット2内の各部は、通信部203を介して、情報処理ユニット4により制御される。また、搬送ユニット2内の各部から出力される信号は、通信部203を介して情報処理ユニット4に送信される。
【0102】
測定ユニット3は、吸引部301と、試料調製部302と、検出部303と、駆動部304と、センサ部305と、バーコードユニットB2と、通信部306を備える。
【0103】
吸引部301は、ピアサ32を介して検体容器T内の全血検体を吸引する機構を含んでいる。試料調製部302は、反応チャンバを含んでおり、各反応チャンバ内で、吸引された全血検体と希釈液と、必要に応じて溶血剤とを混合攪拌し、測定用の試料を調製する。検出部303は、電気抵抗式の検出器と光学式の検出器を含んでおり、試料調製部302により調製された試料に含まれる血球を検出し、計数する。
【0104】
駆動部304は、ハンド部F15a、F15bを駆動させるための機構と、検体容器搬送部32を駆動させるための機構と、ピアサ32を測定ユニット3内で移動するための機構と、測定ユニット3内で検体容器を搬送するための機構と、これらの機構に動力を付与するステッピングモータ等の駆動原を含んでいる。センサ部305は、測定ユニット3内の各位置で検体容器Tを検出するためのセンサを含んでいる。バーコードユニットB2は、上述したように、バーコードリーダB2aを含んでいる。
【0105】
通信部306は、情報処理ユニット4と通信可能に接続されている。測定ユニット3内の各部は、通信部306を介して、情報処理ユニット4により制御される。また、測定ユニット3内の各部から出力される信号は、通信部306を介して情報処理ユニット4に送信される。
【0106】
図10は、情報処理ユニット4の構成を示す図である。
【0107】
情報処理ユニット4は、パーソナルコンピュータからなり、本体40と、入力部41と、表示部42から構成されている。本体40は、CPU401と、ROM402と、RA
M403と、ハードディスク404と、読出装置405と、入出力インターフェース406と、画像出力インターフェース407と、通信インターフェース408を有する。
【0108】
CPU401は、ROM402に記憶されているコンピュータプログラムおよびRAM403にロードされたコンピュータプログラムを実行する。RAM403は、ROM402およびハードディスク404に記録されているコンピュータプログラムの読み出しに用いられる。また、RAM403は、これらのコンピュータプログラムを実行するときに、CPU401の作業領域としても利用される。
【0109】
ハードディスク404には、オペレーティングシステムおよびアプリケーションプログラムなど、CPU401に実行させるための種々のコンピュータプログラムおよびコンピュータプログラムの実行に用いるデータが記憶されている。具体的には、特定キャップCPを特定するために用いる輝度の閾値データや、キャップが検体容器Tに装着されていないことを検出するために用いる輝度の閾値データの他、測定や解析に用いられるコンピュータプログラムおよびデータと、測定ユニット3と搬送ユニット2の各部を制御するためのコンピュータプログラムおよびデータが記憶されている。
【0110】
読出装置405は、CDドライブまたはDVDドライブ等によって構成されており、記録媒体に記録されたコンピュータプログラムおよびデータを読み出すことができる。入出力インターフェース406には、マウスやキーボードからなる入力部41が接続されており、ユーザが入力部41を使用することにより、情報処理ユニット4に指示およびデータが入力される。画像出力インターフェース407は、ディスプレイ等で構成された表示部42に接続されており、画像データに応じた映像信号を、表示部42に出力する。表示部42は、入力された映像信号をもとに、画像を表示する。通信インターフェース408により、搬送ユニット2と、測定ユニット3と、ホストコンピュータに対してデータの送受信が可能となる。
【0111】
図11は、検体容器Tが取込位置Pに到着したときに情報処理ユニット4により行われる処理を示すフローチャートである。
【0112】
検体容器Tが取込位置P2に到着すると(S101:YES)、CPU401は、把持ユニットFを制御して、検体容器Tを検体ラックLから引き抜き、図4(a)に示す攪拌動作を複数回(たとえば、10往復)実行する(S102)。次に、CPU401は、図4(b)、(c)を参照して説明したように、検体容器ホルダHを取込位置P2に搬送するとともに把持ユニットFを制御して、攪拌動作を行った検体容器Tを検体容器ホルダHにセットする(S103)。そして、CPU401は、図4(c)を参照して説明したように、カラーセンサユニットCSを作動させ、この検体容器Tに装着されたキャップの種別を検出するキャップ検出動作を実行する(S104)。
【0113】
その後、CPU401は、搬送容器ホルダHを駆動して検体容器Tを読取位置P3に搬送する(S105)。そして、CPU401は、バーコードユニットB2を制御して、検体容器Tを低速(たとえば、2.5回転/秒)で所定回数(たとえば1回)回転させながら、検体容器Tに貼付されたバーコードラベルBL1を読み取る(S106)。しかる後、CPU401は、ステップS104における検出結果に基づいて、この検体容器Tに装着されたキャップが特定キャップCPであるか否かを判定する。
【0114】
検体容器Tに装着されたキャップが特定キャップCPでない場合(S107:NO)、CPU401は、検体容器Tを、検体容器ホルダHとともに、吸引位置P4に搬送する(S109)。他方、検体容器Tに装着されたキャップが特定キャップCPである場合(S107:YES)、CPU401は、バーコードユニットB2を制御して、検体容器Tを
高速(たとえば、5回転/秒)で複数回(たとえば、5回)回転させ、特定キャップCPの内側に付着した全血検体を除去する動作を実行する(S108)。この動作において、検体容器Tは、図7を参照して説明したように頭部を振って変位し、検体容器Tの側面が複数回(たとえば、5回)検体容器ホルダHの上縁部に打ち付けられ、検体容器に衝撃が加えられる。これにより、特定キャップCPの内側に付着した全血検体が、検体容器T内に落とされる。しかる後、CPU401は、検体容器Tを、検体容器ホルダHとともに、吸引位置P4に搬送する(S109)。
【0115】
こうして検体容器Tが吸引位置P4に位置付けられると、CPU401は、図8(d)に示すように、ピアサ302を下降させ、検体容器T内の全血検体を吸引する動作を実行する(S110)。このとき、ピアサ32は、検体容器Tに装着されたキャップを貫通する。また、ピアサ32の側面に形成された溝32d、32eによって、検体容器T内の圧力が大気圧まで減圧される。
【0116】
こうして、吸引動作が終了すると、CPU401は、検体容器Tを、検体容器ホルダHとともに、取込位置P2に搬送し、把持ユニットFを制御して、検体容器ホルダHに支持された検体容器Tを検体ラックLの元の保持位置に戻す(S111)。これにより、当該検体容器Tに対する処理が終了する。しかる後、CPU401は、ステップS101に戻り、次の検体容器Tが取込位置P2に搬送されるのを待つ。
【0117】
図11(b)は、図11(a)のステップS104におけるキャップ検出動作を示すフローチャートである。
【0118】
キャップ検出動作において、CPU401は、カラーセンサユニットCSの白色光源を点灯させ、検体容器Tに装着されたキャップに白色光を照射する(S201)。そして、CPU401は、カラーセンサを作動させ、白色光が照射されたキャップから、赤色、緑色、青色の輝度に関するデータを取得する(S202)。輝度データが取得されると、CPU401は、白色光源を消灯する(S203)。
【0119】
輝度データを取得した後、CPU401は、取得した緑色の輝度が、キャップが装着されていないことを検出するために予め設定された閾値を越えているかを判定する。取得した緑色の輝度がこの閾値を越えていない場合(S204:NO)、CPU401は、この検体容器Tにはキャップが装着されていないとして、キャップ検出動作を終了する。この場合、特定キャップが検出されなかったことになる。他方、取得した緑色の輝度がこの閾値を越えていると(S204:NO)、CPU401は、この検体容器Tには何らかのキャップが装着されているとして、処理をステップS205に進める。
【0120】
ステップS205において、CPU401は、取得した赤色、緑色、青色の輝度のバランス(色バランス)が、特定キャップの色(乳白色)であることを特定するために予め設定された範囲に含まれるかを判定する(S205)。具体的には、取得した赤色、緑色、青色の輝度をそれぞれR、G、Bで表すとすると、1−a<R/Gであり、且つ、R/G<1+bが満たされる場合に、取得した赤色、緑色、青色の輝度のバランス(色バランス)が、特定キャップの色(乳白色)であることを特定するための設定範囲に含まれると判定される。ここで、a、bは、特定キャップの色が多少くすんでいるような場合にも、特定キャップを検出可能とするための調整定数である。
【0121】
ステップS205における判定がYESである場合、CPU401は、この検体容器Tに装着されたキャップが特定キャップであることを検出する。他方、ステップS205における判定がNOである場合、CPU401は、この検体容器Tに装着されたキャップは特定キャップ以外のキャップであるとして、キャップ検出動作を終了する。この場合、特
定キャップが検出されなかったことになる。
【0122】
以上、本実施の形態によれば、全血検体が吸引される前に、検体容器Tに力が加えられて、特定キャップCPの内側から全血検体が除去されるため、全血検体の攪拌動作によって特定キャップCPの内側に全血検体が付着したとしても、吸引前に特定キャップCPの内側から全血検体を除去することができる。よって、吸引の際にピアサ32を特定キャップCPに貫通させても、貫通個所から特定キャップCPの上部に全血検体が漏れ出すことを防止できる。
【0123】
なお、本実施の形態は、全血検体を収容した後にキャップを押し込んで密閉した検体容器を例に示したように、内部の気圧が大気圧よりも気圧が高い検体容器において、大気開放の際に内部の空気とともに血液が噴き出すことを防止するのに特に好適である。本発明が適用される検体容器の種類はこれに限られず、真空採血管にも本発明が適用され得る。
【0124】
なお、上記実施の形態では、ローラB21を複数回(たとえば5回)回転させ、検体容器Tを複数回(5回)直立状態から変位させたが、検体容器Tを1回だけ変位させるだけでも、特定キャップCPの内側から全血検体を除去できる場合には、検体除去動作時におけるローラ21の回転は1回転のみであっても良い。
【0125】
また、本実施の形態によれば、検体容器Tが頭部を振って変位する際に、検体容器Tの側面が検体容器ホルダHの上縁部に当接し、検体容器Tの変位が唐突に規制されるため、かかる変位の規制により、特定キャップCPの内側に付着した全血検体に急激な慣性力、つまり衝撃が付与されるようになる。これにより、蓋の内側に付着した全血検体を円滑に除去することができる。
【0126】
また、本実施の形態によれば、バーコードユニットB2のローラB21に切欠きB21aを設けることにより、検体容器Tを変位させるよう構成したため、別途、検体容器を変位させるための機構を設ける必要がなく、全血検体除去のための構成を簡素化することができる。
【0127】
また、本実施の形態によれば、検体除去動作時のローラB21の回転速度をバーコード読取動作時のローラB21の回転速度よりも早くしたため、検体容器Tに切欠きB21aが到達したときに、検体容器TをローラB21の中心に向かう方向に素早く変位させることができる。すなわち、切欠きB21aの前端が検体容器Tに到達した後、検体容器Tは、その周面が切欠きB21の前端に摺接しながら、ローラB21の中心に向かう方向に移動する。したがって、ローラB21の回転速度を早めると、検体容器Tの周面が切欠きB21の前端に摺接する期間が短くなり、結果、検体容器TをローラB21の中心に向かう方向の速度を高めることができる。加えて、検体除去動作時のローラB21の回転速度を高めることにより、検体除去動作を短時間で終えることができ、検体の吸引動作へと迅速に移行することができる。
【0128】
また、本実施の形態によれば、特定キャップCPが検出された場合にのみ、検体除去動作(図11(a)のステップS108)が実行されるため、全血検体が付着しにくいキャップが装着された検体容器T、すなわち、全血検体の除去を行う必要のない検体容器Tに対して、無駄に検体除去動作が行われるのを回避することができ、処理の迅速化および効率化を図ることができる。
【0129】
なお、この場合、キャップが装着されておらず、検体容器Tの上部が開放された検体容器も、特定キャップが検出されず、結果、キャップが装着されていない検体容器Tに対しても検体除去動作が実行されない。このため、キャップが装着されていない検体容器Tに
対して検体除去動作が実行されることにより、検体容器の上部から全血検体が飛び出すことを回避することができる。
【0130】
以上、本発明の実施の形態について説明したが、本発明の実施の形態はこれらに限定されるものではない。
【0131】
たとえば、上記実施の形態では、測定ユニット3を一つだけ備える血球計数装置1が例示されたが、測定ユニットの数は一つに限られず、たとえば、図12に示すように、2つの測定ユニット3a、3bを備える血球計数装置1に本発明を適用することもできる。この場合、それぞれの測定ユニット3a、3bは、上記実施の形態に示した測定ユニット3と同様の構成を備え、各測定ユニット3a、3bにおいて、検体攪拌動作と、検体除去動作が行われる。
【0132】
また、上記実施の形態では、検体容器Tに特定キャップCPが装着されている場合にのみ、検体除去動作(図11(a)のステップS108)が実行されたが、特定キャップCP以外のキャップが装着された検体容器Tにも検体除去動作を実行しても良い。ただし、キャップが装着されていない検体容器Tに対しては、検体除去動作を実行すると、検体容器Tに付与された衝撃によって全血検体が漏れ出る可能性があるため、検体除去動作は実行しないのが望ましい。
【0133】
図13(a)は、キャップが装着された全ての検体容器Tに対して検体除去動作を実行する場合の変更例を示すフローチャートである。この変更例では、図11(a)のステップS107が、ステップS121に置き換えられている。また、図11(a)のステップS104におけるキャップ検出動作が、図11(b)から図13(b)のように変更される。
【0134】
図13(b)に示すように、この変更例では、カラーセンサによって緑色の輝度データのみが検出される(S211)。そして、検出された緑色の輝度データが上述の閾値を越える場合(S204:YES)は、検体容器Tの頭部にキャップがあることが検出され(S212)、カラーセンサにより検出された緑色の輝度データが閾値を越えない場合(S204:NO)は、検体容器Tの頭部にキャップがあることが検出されない。
【0135】
そして、図13(a)に示すように、ステップS106においてバーコードラベルBL1の読み取りが行われた後、ステップS121において、検体容器Tにキャップが装着されているかが、図13(b)のキャップ検出動作における検出結果に基づいて判定される。そして、検体容器Tにキャップが装着されている場合(S121:YES)には、ステップS108において、検体除去動作が実行され、検体容器Tにキャップが装着されていない場合(S121:NO)には、ステップS108における検体除去動作が実行されずに、検体容器Tが吸引位置P4に搬送される(S109)。
【0136】
この変更例によれば、キャップが装着されている全ての検体容器に対して検体除去動作が実行されるため、検体除去動作を行う必要がない検体容器Tに対して無駄な検体除去動作が行われることにより処理が非効率となる。しかし、その反面、全血検体が付着し難いキャップに万一全血検体が付着しているような場合にも、キャップから全血検体を除去することができ、吸引動作時に、キャップの上面から全血検体が漏れ出すことをより徹底して防止することができる。なお、この変更例においても、キャップが装着されていない検体容器Tには、検体除去動作が実行されないため、キャップが装着されていない検体容器Tから全血検体が飛び出すことが回避される。
【0137】
図14(a)は、検体容器Tに対して検体除去動作を実行するか否かを検体ラックLの
種別に応じて決定する変更例の動作を示すフローチャートである。この変更例では、図11(a)のステップS107が、ステップS131に置き換えられ、図11(a)のステップS104が省略される。また、この変更例において、ユーザは、検体除去動作を行う検体容器Tを、専用の検体ラック(専用ラック)SLに装着して、右テーブル21にセットする。専用ラックSLは、図2(c)に示すバーコードラベルBL2に保持されたラックIDによって識別可能となっている。
【0138】
この変更例では、ステップS106においてバーコードラベルBL1の読み取りが行われると、ステップS131において、検体容器Tが専用ラックSLに装着されていたかが判別される。この判別は、バーコードユニットB1においてバーコードラベルBL2から読み取られたラックIDに基づいて行われる。そして、検体容器Tが専用ラックSLに装着されていた場合(S131:YES)には、ステップS108において、検体除去動作が実行され、検体容器Tが専用ラックSLに装着されていなかった場合(S131:NO)には、ステップS108における検体除去動作が実行されずに、検体容器Tが吸引位置P4に搬送される(S109)。
【0139】
この変更例によれば、キャップの内側に全血検体が付着する可能性がある場合、ユーザは、専用ラックSLに検体容器Tをセットして、専用ラックSLを右テーブル21にセットすれば良い。よって、効率的に、検体除去動作を実行することができる。
【0140】
図14(b)は、検体容器Tに対して検体除去動作を実行するか否かをユーザが手動で設定する変更例の動作を示すフローチャートである。この変更例では、図11(a)のステップS107が、ステップS141に置き換えられ、図11(a)のステップS104が省略される。
【0141】
この変更例では、たとえば、各検体容器Tに対してオーダ登録を行う場合に、たとえば、図14(b)のようなダイアログが情報処理ユニット4の表示部42に表示される。このダイアログにおいて“はい”のボタンが操作されると、この検体容器Tに対して検体除去動作を実行する設定がなされ、“いいえ”のボタンが操作されると、この検体容器Tに対して検体除去動作を実行する設定がなされない。
【0142】
図14(b)を参照して、ステップS106においてバーコードラベルBL1の読み取りが行われると、ステップS141において、検体容器Tに対して検体除去動作を実行する設定がなされているか否かが判別される。そして、検体除去動作を実行する設定がなされていると(S141:YES)、ステップS108において、検体除去動作が実行され、検体除去動作を実行する設定がなされていなければ(S141:NO)には、ステップS108における検体除去動作が実行されずに、検体容器Tが吸引位置P4に搬送される(S109)。この変更例は、特に、一本ずつ検体容器Tを測定ユニット3にセットして測定を行う血球計数装置に用いて好適なものである。
【0143】
なお、上記実施の形態における図11(a)の動作およびこれを修正した図13(a)および図14(b)の動作は、測定ユニット3において攪拌動作を行わずに、ユーザが手作業で攪拌動作を行う場合にも、適宜修正して適用可能である。たとえば、これらのフローチャートによる動作は、測定ユニット3に攪拌機能が装備されていない場合にも適用可能である。
【0144】
この場合、たとえば、検体容器ホルダHが測定ユニット3の外部まで搬出され、搬出された検体容器ホルダHに直接、手作業にて攪拌された検体容器Tがセットされる。その後、測定開始ボタンの操作により、検体容器ホルダHが、測定ユニット3の内部に搬入され、搬送路上の所定の位置で、ステップS104におけるキャップ検出動作が行われる。そ
の後、ステップS105〜ステップS110の動作が実行される。ステップS110の吸引動作が終了すると、検体容器ホルダHが測定ユニット3の外部に搬出され(S111)、ユーザにより、検体容器Tが取り除かれる。
【0145】
このような構成においても、ユーザが手作業で攪拌する際にキャップの内側に付着した全血検体を、全血検体の吸引前に除去することができるため、検体吸引時に、キャップの内側に付着した全血検体がキャップの外側に漏れ出すことを防止することができる。
【0146】
また、上記実施の形態では、ローラB21に切欠きが一つだけ形成された例が示されたが、ローラB21に形成される切欠きの数は一つに限らず、複数であっても良い。また、ローラB21に、切欠きではなく突部を形成しても良く、あるいは、切欠きと突部を組み合わせても良い。さらに、検体容器Tを変位させるための形状を有するローラは、一つではなく、複数あっても良い。
【0147】
図15(a)は、ローラB21に2つの切欠きが形成される場合の変更例を示す図である。この変更例では、ローラB21の外周面に、上記実施の形態に係る切欠きB21aの他、切欠きB21bが形成されている。切欠きB21bの形状は、切欠きB21aの形状と同じである。この変更例では、ローラB21が1回転する間に、検体容器Tが、ローラB21の中心方向に2回変位するため、上記実施の形態に比べて、より効率的に全血検体を除去することができる。この場合、検体容器Tに付されたバーコードラベルBL1は、切欠きB21a、B21bが形成されていないローラB21の外周面B21c、B21dが検体容器Tに当接する間に読み取られる。外周面B21c、B21dの円周方向の長さは、それぞれ、検体容器Tの円周方向の長さよりもやや大きく設定される。
【0148】
図15(b)〜(d)は、ローラB21に突部が形成される場合の変更例を示す図である。この変更例では、ローラB21の外周面に、ローラB21の中心からの距離が徐々に大きくなる傾斜面を有する突部B21eが形成されている。突部B21eの傾斜面の終端は、段状に、ローラB21の円の径に対応する距離に戻されている。
【0149】
図15(b)の状態からローラB21の回転が進むと、検体容器Tが突部B21eの斜面に押され、検体容器TとローラB11が、図6のバネB17の付勢に抗して、X軸正方向に変位する。その後、ローラB11がさらに回転すると、図15(c)の状態から、突部B21eの終端が検体容器Tの側面を乗り越え、図15(d)のように、検体容器TがバネB17の付勢によって素早くローラB21の中心方向に変位する。こうして検体容器Tが変位すると、検体容器Tの頭部が、図15(d)の破線の丸の位置において、ローラB21の側面に衝突する。この衝突により、検体容器Tのキャップの内側に付着した全血検体が検体容器T内に落とされる。
【0150】
なお、図15(b)〜(d)には、ローラB21の外周面に、突部が一つだけ形成されているが、突部の数は一つに限られず、複数の突部がローラB21の外周面に形成されても良い。また、突起の形状は、図15(b)〜(d)のような三角形状に限らず、台形や、曲面部分を持つ形状であっても良い。ただし、突起の後端部は、段状に円周面へと続くように形成される必要がある。
【0151】
図16(a)は、ローラB21の外周面に突部と切欠きが設けられた変更例を示す図である。この変更例では、突部B21gの終端が切欠きB21fの始端に繋がっている。切欠きB21fは、図15(a)の切欠きB21a、B21bと同様に形成されている。突部B21gは、図15(b)の突部B21eと同様に形成されている。なお、図16(a)に破線で付された円は、切欠きB21fと突部B21gが形成されない場合のローラB21の輪郭を示している。
【0152】
この変更例によれば、突部B21gの終端の高さと切欠きB21fの始端の深さとを加算した距離だけ検体容器Tを変位させることができるため、上記実施の形態の場合に比べて、検体容器Tが切欠きB21fの位置に達したときの検体容器Tの移動速度を高めることができる。このため、図7(e)のように検体容器Tが容器収容部H1の上縁部に当接するときの速度を高めることができ、キャップCPの内側に付着した全血検体により大きな力を加えることができる。よって、本変更例によれば、全血検体の除去作用をさらに高めることができる。
【0153】
上記実施の形態および変更例では、バーコードユニットB2のローラB21に、検体容器Tに力(衝撃)を加えるための構成を付加したが、検体容器搬送部31の搬送路上の、読取位置P3以外の位置に、別途、検体容器Tに力を加えてキャップから全血検体を除去するための構成を追加しても良い。この場合、上記と同様、外周面に切欠きまたは突部が形成され回転駆動されるローラと、他の2つのローラとで検体容器Tを弾性的に挟持する構成が設けられても良く、あるいは、別の形態であってもよい。例えば、検体容器Tの側面を軽く殴打して、検体容器Tに力(衝撃)を加える構成が設けられても良い。あるいは、検体容器Tのキャップを上から殴打して検体容器Tに力(衝撃)を加える構成であってもよい。
【0154】
回転駆動されるローラと、他の2つのローラとで検体容器Tを弾性的に挟持する構成が設けられる場合、図16(b)に示すように、回転駆動されるローラRに、複数の浅い切欠きR1〜R6が形成されても良い。なお、図16(b)に破線で付された円は、切欠きR1〜R6が形成されない場合のローラRの輪郭を示している。
【0155】
この構成の場合、切欠きR1〜R6が浅いため、切欠きR1〜R6が検体容器Tの位置に到達して検体容器Tが変位すると、検体容器Tは、図7(e)のように側面が容器収容部H1の上縁部に当接するのではなく、頭部が切欠きR1〜R6の側面に当接して、キャップの内側に付着した全血検体に、キャップから離反する力が付与される。この変更例によれば、ローラRが1回転するうちに、検体容器を6回揺らすことができるため、全血検体の除去効率を高めることができる。
【0156】
また、ローラの外周面に凹部や突部を形成する構成に代えて、ローラ自身の形状を楕円形にしても良い。こうすると、ローラの回転に伴って、検体容器Tが長手方向に直交する方向に振動するため、キャップの内側に付着した全血検体に振動を付与することができる。したがって、楕円形の長軸と短軸の比を調整し、あるいは、ローラの回転速度を調整することにより、キャップの内側に付着した全血検体を除去することができる。
【0157】
また、ローラを用いる代わりに、検体容器Tの底部を把持して検体容器Tの頭部を振り動かす構成を用いても良い。
【0158】
また、上記実施の形態では、特定キャップCPを色により検出したが、形状に基づいて特定キャップCPを検出しても良い。この場合、たとえば、キャップを撮像する撮像部を測定ユニット3内に配置し、撮像したキャップの画像を解析することにより、検体容器Tに装着されたキャップが特定キャップCPであることが検出される。あるいは、特定キャップCPに目印を付与し、この目印を検出することにより、特定キャップを検出するようにしても良い。
【0159】
また、検体除去動作時における検体容器の変位方向は、検体容器の長手方向に交差する方向に限らず、検体容器の長手方向に平行な方向であっても良い。たとえば、検体容器を検体容器ホルダHから持ち上げた後、検体容器ホルダH内に落下させ、検体容器Tの底部
を検体容器ホルダHの設置面H3に打ちつけることにより、キャップの内側に付着した全血検体に蓋から離れる力を付与するようにしても良い。あるいは、自然落下ではなく、鉛直下方向に力を付与して、検体容器Tを検体容器ホルダH内に落下させても良い。具体的には、ハンド部によって検体容器Tを把持して上方に持ち上げ、把持を解除することで検体容器TをホルダH内に落下させ、底に打ち付けることで力を付与してもよい。あるいは、検体容器の頭部をバネなどの弾性体で弾性的に牽引し、牽引を解除することで頭部を急速に動かして慣性力を付与してもよい。あるいは、偏心モータで検体容器に振動を付与してもよい。
【0160】
また、上記実施の形態では、検体容器Tを転倒攪拌、つまり、底部が頭部よりも高くなるように検体容器を攪拌する形態を示したが、検体容器を動かして全血検体を攪拌するものであれば、種々の変更を伴い得る。例えば、検体容器を直立状態から水平状態まで振り子運動させる形態であっても、振り子運動の速度が十分に速ければ、全血検体を十分に攪拌することができる。また、検体容器をハンドで掴んで攪拌する形態に限らず、検体容器を保持したラックを転倒させることで攪拌する形態でもよい。また、検体容器を上下に動かす形態でもよい。
【0161】
この他、本発明の実施の形態は、特許請求の範囲に示された技術的思想の範囲内において、適宜、種々の変更が可能である。
【符号の説明】
【0162】
1 … 血球計数装置
3 … 測定ユニット
31 … 検体容器搬送部
32 … ピアサ
32d、32e … 溝
401 … CPU
B2 … バーコードユニット
B21 … ローラ
B21a、B21b、B21f … 切欠き
B21e、B21g … 突部
CS … カラーセンサユニット
CP … 特定キャップ
F … 把持ユニット
F15a、F15b … ハンド部
H … 検体容器ホルダ
H1 … 容器収容部
T … 検体容器
【特許請求の範囲】
【請求項1】
蓋により密封された検体容器内から全血検体を吸引し、全血検体に含まれる血球を計数する血球計数装置において、
前記検体容器を動かして前記検体容器内の全血検体を攪拌する検体攪拌部と、
前記検体攪拌部による攪拌後に前記検体容器の前記蓋に吸引管を貫通させて前記検体容器内の全血検体を吸引する検体吸引部と、
前記検体吸引部によって吸引された全血検体に含まれる血球を計数する検出部と、
前記検体攪拌部による攪拌後に、前記検体容器を立たせた状態で、前記蓋の内側に付着した全血検体が前記蓋から離反するように、前記検体容器に力を付与する力付与手段と、を有することを特徴とする血球計数装置。
【請求項2】
請求項1に記載の血球計数装置において、
前記力付与手段は、前記検体容器に力を付与することにより前記検体容器を移動させて、前記蓋の内側に付着した全血検体に前記蓋から離反する力を付与する、
ことを特徴とする血球計数装置。
【請求項3】
請求項2に記載の血球計数装置において、
前記力付与手段は、前記検体容器に力を付与することにより、前記検体容器の長手方向に交差する方向に、前記検体容器を移動させる、
ことを特徴とする血球計数装置。
【請求項4】
請求項3に記載の血球計数装置において、
少なくとも頭部が揺れる状態で前記検体容器を立たせた状態で支持する検体容器支持部をさらに備え、
前記力付与手段は、前記検体容器支持部に前記検体容器が支持された状態において、前記検体容器に前記検体容器の長手方向に交差する方向の力を付与する、
ことを特徴とする血球計数装置。
【請求項5】
請求項4に記載の血球計数装置において、
前記力付与手段は、前記検体容器の外周面に接触して前記検体容器の長手方向に平行な軸の周りに前記検体容器を回転させるローラと、前記検体容器を回転可能な状態で前記検体容器を前記ローラに押し付ける付勢部を含み、前記ローラの外周は、前記ローラの回転軸からの距離が不定となるように形成されており、
前記力付与手段は、前記ローラを前記検体容器の外周面に接触させた状態で、前記ローラを少なくとも一回転させる、
ことを特徴とする血球計数装置。
【請求項6】
請求項5に記載の血球計数装置において、
前記ローラは、前記ローラの外周面に設けられ、前記ローラの回転軸からの距離が段状に変化する段差を含み、当該段差を前記検体容器が通過する際に、前記検体容器の長手方向に交差する方向に、前記検体容器が移動する、
ことを特徴とする血球計数装置。
【請求項7】
請求項5または6に記載の血球計数装置において、
前記検体容器の長手方向に平行な軸の周りに前記検体容器を回転させながら前記検体容器に付されたバーコードを読み取るバーコードリーダをさらに備え、
前記ローラは、前記バーコードリーダの前記検体容器を回転させるためのローラである、
ことを特徴とする血球計数装置。
【請求項8】
請求項7に記載の血球計数装置において、
前記バーコードリーダは、前記ローラの外周面を前記検体容器の外周面に当接させて前記検体容器を第1速度で回転させつつ前記バーコードを読み取る第1工程と、前記第1速度よりも高速で前記検体容器を回転させて前記蓋の内側に付着した全血検体を除去する第2工程を実行する、
ことを特徴とする血球計数装置。
【請求項9】
請求項4ないし8の何れか一項に記載の血球計数装置において、
前記検体容器支持部に前記検体容器が当接することにより、前記検体容器の移動が規制される、
ことを特徴とする血球計数装置。
【請求項10】
請求項5ないし8に記載の血球計数装置において、
前記ローラの外周面に前記検体容器が当接することにより、前記検体容器の移動が規制される、
ことを特徴とする血球計数装置。
【請求項11】
請求項1ないし10の何れか一項に記載の血球計数装置において、
前記検体攪拌部によって全血検体が攪拌された検体容器を直立状態で保持して前記検体吸引部における吸引位置に搬送する搬送部をさらに備え、
前記力付与手段は、前記搬送部における前記検体容器の搬送路上の所定の位置において、前記検体容器に力を付与する、
ことを特徴とする血球計数装置。
【請求項12】
請求項1ないし11の何れか一項に記載の血球計数装置において、
検体容器について特定の蓋を検出する蓋検出部をさらに備え、
前記力付与手段は、前記蓋検出部により前記特定の蓋が検出された検体容器に対して力を付与し、前記蓋検出部により前記特定の蓋が検出されなかった検体容器に対しては力の付与を中止する、
ことを特徴とする血球計数装置。
【請求項13】
請求項12に記載の血球計数装置において、
前記蓋検出部は、検体容器に付された蓋の色を検出するカラーセンサを含み、前記カラーセンサにより検出された色が前記特定の蓋の色に対応するかに基づいて、検体容器の蓋が特定の蓋であることを検出する、
ことを特徴とする血球計数装置。
【請求項14】
請求項1ないし13の何れか一項に記載の血球計数装置において、
前記検体容器内の圧力を前記検体容器外部の圧力と等しくするための溝が、前記吸引管の外側面に、前記吸引管の長手方向に沿って形成されている、
ことを特徴とする血球計数装置。
【請求項15】
蓋により密封され内部の全血検体が攪拌された検体容器内から全血検体を吸引し、吸引された全血検体に含まれる血球を計数する血球計数装置において、
前記検体容器の前記蓋に吸引管を貫通させて前記検体容器内の全血検体を吸引する検体吸引部と、
前記検体吸引部によって吸引された全血検体に含まれる血球を計数する検出部と、
前記検体吸引部による吸引前に、前記検体容器を立たせた状態で、前記蓋の内側に付着した全血検体が前記蓋から離反するように、前記検体容器に力を付与する力付与手段と、
を有することを特徴とする血球計数装置。
【請求項16】
蓋により密封され内部の全血検体が攪拌された検体容器内から全血検体を吸引し、吸引された全血検体に含まれる血球を計数する血球計数装置において、
前記検体容器の前記蓋に吸引管を貫通させて前記検体容器内の全血検体を吸引する検体吸引部と、
前記検体吸引部によって吸引された全血検体に含まれる血球を計数する検出部と、を備え、
前記検体吸引部による吸引前に、前記検体容器に衝撃を加えることにより、前記蓋の内側に付着した全血検体が前記蓋から離反させる、
ことを特徴とする血球計数装置。
【請求項17】
蓋により密封された検体容器内から全血検体を吸引し、吸引された全血検体に含まれる血球を計数する血球計数方法において、
前記検体容器を動かして前記検体容器内の全血検体を攪拌する攪拌工程と、
前記検体容器を立たせた状態で、前記蓋の内側に付着した全血検体が前記蓋から離反するように、前記検体容器に力を付与する力付与工程と、
前記検体容器の前記蓋に吸引管を貫通させて前記検体容器内の全血検体を吸引する吸引工程と、
前記吸引工程において吸引された全血検体に含まれる血球を計数する検出工程と、
を有することを特徴とする血球計数方法。
【請求項1】
蓋により密封された検体容器内から全血検体を吸引し、全血検体に含まれる血球を計数する血球計数装置において、
前記検体容器を動かして前記検体容器内の全血検体を攪拌する検体攪拌部と、
前記検体攪拌部による攪拌後に前記検体容器の前記蓋に吸引管を貫通させて前記検体容器内の全血検体を吸引する検体吸引部と、
前記検体吸引部によって吸引された全血検体に含まれる血球を計数する検出部と、
前記検体攪拌部による攪拌後に、前記検体容器を立たせた状態で、前記蓋の内側に付着した全血検体が前記蓋から離反するように、前記検体容器に力を付与する力付与手段と、を有することを特徴とする血球計数装置。
【請求項2】
請求項1に記載の血球計数装置において、
前記力付与手段は、前記検体容器に力を付与することにより前記検体容器を移動させて、前記蓋の内側に付着した全血検体に前記蓋から離反する力を付与する、
ことを特徴とする血球計数装置。
【請求項3】
請求項2に記載の血球計数装置において、
前記力付与手段は、前記検体容器に力を付与することにより、前記検体容器の長手方向に交差する方向に、前記検体容器を移動させる、
ことを特徴とする血球計数装置。
【請求項4】
請求項3に記載の血球計数装置において、
少なくとも頭部が揺れる状態で前記検体容器を立たせた状態で支持する検体容器支持部をさらに備え、
前記力付与手段は、前記検体容器支持部に前記検体容器が支持された状態において、前記検体容器に前記検体容器の長手方向に交差する方向の力を付与する、
ことを特徴とする血球計数装置。
【請求項5】
請求項4に記載の血球計数装置において、
前記力付与手段は、前記検体容器の外周面に接触して前記検体容器の長手方向に平行な軸の周りに前記検体容器を回転させるローラと、前記検体容器を回転可能な状態で前記検体容器を前記ローラに押し付ける付勢部を含み、前記ローラの外周は、前記ローラの回転軸からの距離が不定となるように形成されており、
前記力付与手段は、前記ローラを前記検体容器の外周面に接触させた状態で、前記ローラを少なくとも一回転させる、
ことを特徴とする血球計数装置。
【請求項6】
請求項5に記載の血球計数装置において、
前記ローラは、前記ローラの外周面に設けられ、前記ローラの回転軸からの距離が段状に変化する段差を含み、当該段差を前記検体容器が通過する際に、前記検体容器の長手方向に交差する方向に、前記検体容器が移動する、
ことを特徴とする血球計数装置。
【請求項7】
請求項5または6に記載の血球計数装置において、
前記検体容器の長手方向に平行な軸の周りに前記検体容器を回転させながら前記検体容器に付されたバーコードを読み取るバーコードリーダをさらに備え、
前記ローラは、前記バーコードリーダの前記検体容器を回転させるためのローラである、
ことを特徴とする血球計数装置。
【請求項8】
請求項7に記載の血球計数装置において、
前記バーコードリーダは、前記ローラの外周面を前記検体容器の外周面に当接させて前記検体容器を第1速度で回転させつつ前記バーコードを読み取る第1工程と、前記第1速度よりも高速で前記検体容器を回転させて前記蓋の内側に付着した全血検体を除去する第2工程を実行する、
ことを特徴とする血球計数装置。
【請求項9】
請求項4ないし8の何れか一項に記載の血球計数装置において、
前記検体容器支持部に前記検体容器が当接することにより、前記検体容器の移動が規制される、
ことを特徴とする血球計数装置。
【請求項10】
請求項5ないし8に記載の血球計数装置において、
前記ローラの外周面に前記検体容器が当接することにより、前記検体容器の移動が規制される、
ことを特徴とする血球計数装置。
【請求項11】
請求項1ないし10の何れか一項に記載の血球計数装置において、
前記検体攪拌部によって全血検体が攪拌された検体容器を直立状態で保持して前記検体吸引部における吸引位置に搬送する搬送部をさらに備え、
前記力付与手段は、前記搬送部における前記検体容器の搬送路上の所定の位置において、前記検体容器に力を付与する、
ことを特徴とする血球計数装置。
【請求項12】
請求項1ないし11の何れか一項に記載の血球計数装置において、
検体容器について特定の蓋を検出する蓋検出部をさらに備え、
前記力付与手段は、前記蓋検出部により前記特定の蓋が検出された検体容器に対して力を付与し、前記蓋検出部により前記特定の蓋が検出されなかった検体容器に対しては力の付与を中止する、
ことを特徴とする血球計数装置。
【請求項13】
請求項12に記載の血球計数装置において、
前記蓋検出部は、検体容器に付された蓋の色を検出するカラーセンサを含み、前記カラーセンサにより検出された色が前記特定の蓋の色に対応するかに基づいて、検体容器の蓋が特定の蓋であることを検出する、
ことを特徴とする血球計数装置。
【請求項14】
請求項1ないし13の何れか一項に記載の血球計数装置において、
前記検体容器内の圧力を前記検体容器外部の圧力と等しくするための溝が、前記吸引管の外側面に、前記吸引管の長手方向に沿って形成されている、
ことを特徴とする血球計数装置。
【請求項15】
蓋により密封され内部の全血検体が攪拌された検体容器内から全血検体を吸引し、吸引された全血検体に含まれる血球を計数する血球計数装置において、
前記検体容器の前記蓋に吸引管を貫通させて前記検体容器内の全血検体を吸引する検体吸引部と、
前記検体吸引部によって吸引された全血検体に含まれる血球を計数する検出部と、
前記検体吸引部による吸引前に、前記検体容器を立たせた状態で、前記蓋の内側に付着した全血検体が前記蓋から離反するように、前記検体容器に力を付与する力付与手段と、
を有することを特徴とする血球計数装置。
【請求項16】
蓋により密封され内部の全血検体が攪拌された検体容器内から全血検体を吸引し、吸引された全血検体に含まれる血球を計数する血球計数装置において、
前記検体容器の前記蓋に吸引管を貫通させて前記検体容器内の全血検体を吸引する検体吸引部と、
前記検体吸引部によって吸引された全血検体に含まれる血球を計数する検出部と、を備え、
前記検体吸引部による吸引前に、前記検体容器に衝撃を加えることにより、前記蓋の内側に付着した全血検体が前記蓋から離反させる、
ことを特徴とする血球計数装置。
【請求項17】
蓋により密封された検体容器内から全血検体を吸引し、吸引された全血検体に含まれる血球を計数する血球計数方法において、
前記検体容器を動かして前記検体容器内の全血検体を攪拌する攪拌工程と、
前記検体容器を立たせた状態で、前記蓋の内側に付着した全血検体が前記蓋から離反するように、前記検体容器に力を付与する力付与工程と、
前記検体容器の前記蓋に吸引管を貫通させて前記検体容器内の全血検体を吸引する吸引工程と、
前記吸引工程において吸引された全血検体に含まれる血球を計数する検出工程と、
を有することを特徴とする血球計数方法。
【図1】


【図2】
【図3】
【図4】
【図5】

【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図16】
【図15】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図16】
【図15】
【公開番号】特開2013−108814(P2013−108814A)
【公開日】平成25年6月6日(2013.6.6)
【国際特許分類】
【出願番号】特願2011−253290(P2011−253290)
【出願日】平成23年11月18日(2011.11.18)
【出願人】(390014960)シスメックス株式会社 (810)
【Fターム(参考)】
【公開日】平成25年6月6日(2013.6.6)
【国際特許分類】
【出願日】平成23年11月18日(2011.11.18)
【出願人】(390014960)シスメックス株式会社 (810)
【Fターム(参考)】
[ Back to top ]