
行動予測装置及び行動予測方法及び運転支援装置
【課題】簡易な構成でありながら、検知した移動体の行動を高い信頼性のもとに予測することのできる行動予測装置及び行動予測方法、及びこの予測された移動体の行動に基づいて運転支援を行うことのできる運転支援装置を提供する。
【解決手段】
移動体の存在の有無を検出する移動体検出部110と、該移動体検出部にて検出された移動体または同移動体の一部の物理的性質を検出する物性検出部120と、該検出された物理的性質に基づきその特徴である属性を識別する属性識別部210と、物性検出部120にて検出された移動体または同移動体の一部の温度を検出する温度検出部130とを備える。そして、車両行動予測部230では、属性識別部210により識別された属性情報と温度検出部130により検出された温度情報とに基づき移動体の行動を予測する。
【解決手段】
移動体の存在の有無を検出する移動体検出部110と、該移動体検出部にて検出された移動体または同移動体の一部の物理的性質を検出する物性検出部120と、該検出された物理的性質に基づきその特徴である属性を識別する属性識別部210と、物性検出部120にて検出された移動体または同移動体の一部の温度を検出する温度検出部130とを備える。そして、車両行動予測部230では、属性識別部210により識別された属性情報と温度検出部130により検出された温度情報とに基づき移動体の行動を予測する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、移動体の行動を予測する行動予測装置、及び行動予測方法、及びこうして予測された移動体の行動に基づいて運転支援を行う運転支援装置に関する。
【背景技術】
【0002】
近年のカーナビゲーションシステム等を用いた運転支援システムでは、移動時間の短縮や渋滞の抑制、障害物等との衝突の回避などを実現すべく、ドライバに対する各種運転支援が行われている。こうした運転支援システムでは通常、自車両の周辺に存在する車両や人物などといった移動体の存在を検出するとともに、この検出結果に基づき、半強制的な制動力の付与による減速支援や警告、推奨経路の案内、自律運転等の各種運転支援が行われる。そして従来、こうした運転支援等を実現するための移動体の存在の有無を検出する装置としては、例えば特許文献1に記載の車両検知装置が知られている。この特許文献1に記載の車両検知装置を図18及び図19に示す。
【0003】
図18に示すように、この車両検知装置は、大きくは、車両や道路等の存在の有無を検知するセンサ部2を有する車両検知器1と、この車両検知器1による検知結果に基づき車両の存在の有無を判定する車両有無判定部10とを有している。このうち、車両検知器1を構成するセンサ部2は、車両や道路等の検知対象が発する赤外線を検知する複数のサーモパイル素子3を備えて構成されている。また、車両検知装置は、信号機の現示態様を制御する信号機制御装置や管理センターなどに車両有無判定部10による判定結果を送信するための無線通信部11を備えている。
【0004】
このように構成される車両検知装置では、サーモパイル素子3によって検知対象から発生された赤外線が検知されると、このサーモパイル素子3には検知対象に応じた起電力が発生する。そして、この発生した起電力がアンプ13によって増幅され、この増幅された起電力が検知対象の検知結果として車両有無判定部10に入力される。車両有無判定部10では、検知対象に応じた起電力が入力されると、この起電力がA/D変換器14にてデジタル信号に変換される。そして、車両有無判定部10では、感知処理として、このデジタル信号に基づくサーモパイル素子3の検知結果が所定の閾値を超えたか否かの判定に基づき車両等の移動体の存在の有無が判定される。そしてこうした判断結果が集計されると、この集計結果が上記無線通信部11に入力され、同入力された集計結果が無線制御部11bにて制御される送受信部11aを介して信号機制御装置や交通管理センターなどに送信される。
【0005】
このように構成される車両検知装置では、図19に示すように、道路傍の支柱30等に上記車両検知器1が設置される。この車両検知器1は、複数のサーモパイル素子3による移動体の監視範囲として車幅方向に隣り合う2つの監視範囲3A及び3Bを有している。そして、それら監視範囲3A及び3Bに車両20が侵入すると、この車両20のエンジンやルーフ等の部位と道路面との温度差に基づいて車両20の存在が検知される。
【0006】
このように、特許文献1に記載の装置によれば、上記複数のサーモパイル素子3による監視範囲3A及び3Bへの車両20の侵入に基づきその検知が行われることから、車両のある部位と道路面との温度差が小さい場合であっても、別の部位と道路面との温度差に基づいてその検知精度を高めることができるようになる。また、上記センサ部2としてサーモパイル素子3を採用したことで、車両の側方からでもその検知を高精度に行うことができるようにもなる。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開2004−302699号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
ところで、実際の交通環境に即した運転支援を行う上では、車両や人物等の移動体の存在の有無のみならず、自車両の周辺に存在する移動体が今後どのように行動するかによっても、この移動体の存在を考慮した運転支援態様は異なるものとなる。すなわち、例えば自車両の進行方向前方に停車している車両が発進する可能性が高い場合や同車両からの乗員の乗降の可能性が高い場合には、車両や乗員等の存在を自車両に対するリスクとして考慮した経路選択や減速案内、警告等が必要となる。一方、自車両の進行方向前方に停車している停止車両の発進の可能性が低い場合には、この停止車両の存在を自車両に対するリスクとして考慮する必要性は低く、この停止車両との必要最低限の車間距離を確保した上での経路等の選択が行われることが望ましい。
【0009】
しかし実情としては、たとえ上記サーモパイル素子3等をはじめとする各種センサによって監視範囲に存在する移動体を検知することができたとしても、この検知した移動体が今後どのように行動するかを予測することは難しく、移動体の行動予測技術の開発はもとより、同移動体の行動予測に基づく運転支援の実用化が切望されている。
【0010】
本発明は、このような実情に鑑みてなされたものであり、その目的は、簡易な構成でありながら、検知した移動体の行動を高い信頼性のもとに予測することのできる行動予測装置及び行動予測方法、及びこの予測された移動体の行動に基づいて運転支援を行うことのできる運転支援装置を提供することにある。
【課題を解決するための手段】
【0011】
以下、上記課題を解決するための手段及びその作用効果について記載する。
請求項1に記載の発明は、移動体の行動を予測する行動予測装置であって、前記移動体の存在の有無を検出する移動体検出部と、該移動体検出部にて検出された移動体または同移動体の一部の物理的性質を検出する物性検出部と、該検出された物理的性質に基づきその特徴である属性を識別する属性識別部と、前記移動体検出部にて検出された移動体または同移動体の一部の温度を検出する温度検出部と、前記属性識別部により識別された属性情報と前記温度検出部により検出された温度情報とに基づき前記移動体の行動を予測する行動予測部とを備えることを要旨とする。
【0012】
車両などをはじめとする移動体は、排気管やタイヤ等の各部材の温度が、同移動体の走行直後や走行開始準備といった状態に応じて変化する。例えば停止中の車両の排気管の温度が高い場合には、車両が発進待機状態にあり、その後に発進する可能性が高く、車両の排気管の温度が低い場合には、停車状態を継続する傾向にあり、その後に発進する可能性が低い。このため、上記構成によれば、検知対象とする移動体もしくは同移動体の一部の属性情報と温度情報とに基づいて移動体の行動を予測することができるようになる。これにより、簡易な構成でありながら、検知した移動体の行動を高い信頼性のもとに予測することができるようになる。
【0013】
請求項2に記載の発明は、請求項1に記載の行動予測装置において、前記物性検出部及び前記属性識別部と前記温度検出部とは前記移動体の異なる複数の部分についてそれぞれ前記物理的性質を検出してその属性を識別するとともに、前記温度を検出するものであり、前記行動予測部は、前記異なる複数の部分について各々関連付けられた属性情報毎の各々の温度情報の組み合わせに基づいて前記移動体の行動を予測することを要旨とする。
【0014】
車両等の移動体を構成する排気管やタイヤ等の各部材の温度は、それぞれ一様に変化するものではなく、同一の移動体であっても部材毎に異なる温度となる。例えば、車両のタイヤの温度が低く、かつ、排気管の温度が低い場合には、車両が停車状態を継続する傾向にあり、その後に発進する可能性が低い。一方、車両のタイヤの温度が低い場合であっても、排気管の温度が高い場合には、車両が発進待機状態にあり、その後に発進する可能性が高い。このように、移動体を構成する各部材の温度とは、それらの機能が反映された固有の温度となる。そこで、上記構成によるように、上記物性検出部及び属性識別部と上記温度検出部とで移動体の異なる複数の部分についてそれぞれ物理的性質を検出してその属性を識別するとともに、温度を検出し、それら異なる複数の部分について各々関連付けられた属性情報毎の各々の温度情報の組み合わせに基づいて移動体の行動を予測することとすれば、属性情報毎に固有の温度情報の組み合わせを通じて予測可能な移動体の行動のバリエーションが拡大されるようになるとともに、より信頼性の高い移動体の行動予測が実現されるようになる。
【0015】
請求項3に記載の発明は、請求項1または2に記載の行動予測装置において、前記行動予測部は、前記属性識別部により識別された属性情報と前記温度検出部により検出された温度情報とに基づき前記移動体の現状態を特定するとともに、この特定した移動体の現状態から同移動体の行動を予測することを要旨とする。
【0016】
通常、停止継続状態、発進待機状態、停止直後などといった移動体の各種状態と、この移動体の以後の行動とは相関する。すなわち、移動体が継続して停止しているときや停止直後は、その後に行動を開始する可能性が低く、アイドリング状態等の発進待機状態にあるときには、その後に開始する可能性が高い。そして、こうした移動体の現状態とは、移動体や同移動体を構成する各部材の温度に基づき特定することが可能である。そこで、上記構成によるように、上記属性識別部により識別された属性情報と上記温度検出部により検出された温度情報とに基づき移動体の現状態を特定するとともに、この特定した移動体の現状態から同移動体の行動を予測することとすれば、移動体の現状態と未来の状態との相関性を利用したより的確な移動体の行動予測が実現されるようになる。
【0017】
請求項4に記載の発明は、請求項1〜3のいずれか一項に記載の行動予測装置において、前記移動体の周辺に存在する気体成分を検出する気体成分検出部をさらに備え、前記行動予測部は、前記気体成分検出部にて検出された気体成分情報を加味して前記移動体の行動を予測することを要旨とする。
【0018】
エンジン等を駆動源とした移動体は、その走行時に排気ガス等の気体を排出することが普通であり、こうした排気ガス中のNox(窒素酸化物)の濃度は、エンジン等の回転数に比例する。例えば、移動体の周辺から排気ガス成分が検出されないときには、移動体に搭載されたエンジンが停止していると識別することができ、この識別結果に基づいて移動体が発進する可能性が極めて低いと予測することができる。一方、移動体の周辺から排気ガスが検出されたときには、その排気ガスの濃度が高いほど移動体に搭載されたエンジンが高回転で稼働していると識別することができ、この識別されたエンジンの回転数が高いほど移動体が発進する可能性が高いと予測することができる。そこで、上記構成によるように、上記移動体の周辺に存在する気体成分を検出する気体成分検出部をさらに備える構成とし、この気体成分検出部にて検出された気体成分情報を加味して移動体の行動を予測することとすれば、上記属性情報及び温度情報に基づき予測された移動体の行動を、より詳細に分類することができるようになる。
【0019】
請求項5に記載の発明は、請求項4に記載の行動予測装置において、前記行動予測部は、前記気体成分検出部にて検出された気体成分情報を加味して該当する移動体の現状態を
特定するとともに、この特定した移動体の現状態から同移動体の行動を予測することを要旨とする。
【0020】
通常、移動体や同移動体を構成する各部材の温度とは、移動体の現状態に相関するものの、検出及び識別の対象とする部材如何によってはその温度情報に基づき移動体の行動を予測することが困難な場合もある。例えば、上記検出された排気管の温度が高いときには、その温度情報のみによっては移動体が停止直後(発進可能性:低)なのか、あるいは、エンジンが始動された直後(発進可能性:高)なのかを判別することは難しい。そこで、こうした排気管等の温度情報に併せて同排気管から排出される排気ガス成分を加味することとすれば、検知対象とする移動体の現状態が停止直後なのか、あるいは、エンジンが始動された直後なのかを判別することができるようになる。このため、上記構成によるように、上記識別され検出された属性情報及び温度情報に、さらに上記気体成分情報を加味して該当する移動体の現状態を特定することとすれば、移動体の現状態をより詳細に特定することができるようになり、この特定された移動体の現状態に基づくきめ細かい行動予測が実現されるようになる。
【0021】
請求項6に記載の発明は、請求項1〜5のいずれか一項に記載の行動予測装置において、前記属性識別部により識別された属性情報と前記温度検出部により検出された温度情報とに基づき前記移動体に搭乗する乗員の有無を推定する乗員有無推定部をさらに備え、前記行動予測部は、前記乗員有無推定部にて推定された前記移動体に対する乗員の有無を加味して前記移動体の行動を予測することを要旨とする。
【0022】
車両等の移動体はそのユーザ等によって操作されることが普通であり、移動体に乗員が存在しないときには、同移動体が行動を開始する可能性が無いものとして予測することができる。そして、こうした乗員の有無は、例えば車両等に設けられた窓の領域の温度分布に基づき推定することが可能であり、この温度が乗員の存在に適さない温度であるときには、移動体に乗員が存在する可能性が低いと推定することが可能である。そこで、上記構成によるように、上記乗員有無推定部にて推定された移動体に対する乗員の有無を加味して移動体の行動を予測することとすれば、乗員の有無の判別を通じて移動体の行動をより高精度に予測することができるようになる。
【0023】
請求項7に記載の発明は、請求項1〜6のいずれか一項に記載の行動予測装置において、前記属性識別部により識別された属性情報と前記温度検出部により検出された温度情報とを関連付けて漸次記憶する記憶手段をさらに備え、前記行動予測部は、前記記憶手段に記憶された属性情報の推移と該当する温度情報の推移とに基づき特定される移動体の状態の変化傾向に基づいて前記移動体の行動を予測することを要旨とする。
【0024】
例えば、移動体が停止している状態が継続し、かつ、移動体の内部空間の温度が乗員の存在に適した温度を超えて上昇しているときには、移動体に乗員が存在せず、この移動体が発進する可能性が極めて低いと判断することが可能である。また例えば、一定であった排気管の温度が上昇したときには、移動体の状態が停止状態から発進待機状態へと遷移し、その後に発進する可能性が高いと判断することが可能である。そこで、上記構成によるように、属性識別部により識別された属性情報と温度検出部により検出された温度情報とを関連付けて漸次記憶するとともに、この記憶された属性情報の推移と該当する温度情報の推移とに基づき特定される移動体の状態の変化傾向に基づいて前記移動体の行動を予測することとすれば、移動体の状態変化を利用した幅広い行動予測が可能となる。
【0025】
請求項8に記載の発明は、請求項7に記載の行動予測装置において、前記行動予測部は、前記移動体の状態の変化傾向として停止状態にある移動体が行動を開始する可能性の推移を求め、この求めた行動を開始する可能性の推移が一定であるときに前記停止状態にあ
る移動体が行動を開始する可能性が高いとして前記移動体の行動を予測するとともに、前記求めた行動を開始する可能性の推移が変化しているときには前記停止状態にある移動体が行動を開始する可能性が低いとして前記移動体の行動を予測することを要旨とする。
【0026】
例えば、車両等の移動体にあっては、移動に際しての駆動源となるエンジン等の駆動システムが起動され、この起動されたエンジン等が安定した状態(アイドリング状態)に遷移してからドライバ等による移動体の操作が開始され、移動体が行動を開始する傾向にある。このため、アイドリング状態が継続している状態、換言すれば、移動体が行動を開始する可能性が高い状態が継続している場合には移動体が行動を開始する直前であると予測することができる。一方、エンジン等が起動されてからアイドリング状態に遷移した直後、換言すれば、移動体が行動を開始する可能性が低い状態から行動を開始する可能性が高い状態に推移(変化)したときには、アイドリング状態が継続していたときと比べてその直後に移動体が行動を開始する可能性は低い。すなわち、移動体が行動を開始する可能性の推移が変化するときと維持されているときとでは、停止状態にある移動体が行動を開始するまでの待機時間は異なるのが普通である。そこで、上記構成によるように、移動体の状態の変化傾向として停止状態にある移動体が行動を開始する可能性の推移を求め、この推移に基づき移動体の行動を予測することとすれば、移動体が行動を開始する可能性の推移の監視に基づき、同移動体が行動を開始するまでの時間差を利用したよりきめ細かな予測をすることができるようになる。
【0027】
請求項9に記載の発明は、請求項7または8に記載の行動予測装置において、前記行動予測部は、前記移動体の状態の変化傾向に基づいて前記移動体との間で乗員が乗降する可能性をさらに求め、該求めた乗降の可能性を加味して前記移動体の行動を予測することを要旨とする。
【0028】
上記の通り、乗員が搭乗する移動体の内部空間の温度が乗員の存在に適さない温度のもとに推移しているときには、この移動体に乗員が存在する可能性が極めて低い。このため、この移動体との間で乗員が乗降する可能性も極めて低いと予測することができ、この移動体においてドアの開閉等の動作が生じる可能性も低いと予測することが可能である。またこのときには、監視対象とする移動体の乗員に対するリスク回避の必要性が低いものとして判断することもできる。一方、移動体の停止状態とアイドリング状態とが継続したのちに移動体に搭載されたエンジン等が停止したときには、乗員による操作が行われた可能性が高く、移動体に乗員が存在していると推定することが可能である。そしてこの場合には、この移動体との間で乗員が乗降する可能性が高いと予測することができ、この移動体においてドアの開閉等の動作が生じる可能性が高いものと予測することが可能である。またこのときには、監視対象とする移動体の乗員に対するリスク回避の必要性が高いものとして判断することもできる。
【0029】
このため、上記構成によるように、移動体の状態の変化傾向に基づいて移動体との間で乗員が乗降する可能性をさらに求め、この求めた乗降の可能性を加味して移動体の行動を予測することとすれば、移動体のドアの開閉動作等をはじめとする詳細な行動予測が実現されるようになる。また、移動体からの乗員の乗降の可能性の有無に基づき、同移動体の行動や同移動体から乗降する乗員の存在をリスクとして考慮した行動予測が実現されるようにもなる。
【0030】
請求項10に記載の発明は、請求項1〜9のいずれか一項に記載の行動予測装置において、前記移動体検出部及び前記物性検出部及び前記温度検出部は、一のスペクトルセンサによって構成されることを要旨とする。
【0031】
上記構成によるように、前記移動体検出部及び前記物性検出部及び前記温度検出部を一
つのスペクトルセンサによって構成することとすれば、上記移動体の存在の有無はもとより、この移動体または同移動体の一部の物理的性質及び温度を一つのセンサのみによって取得することができるようになる。これにより、行動予測装置としてより簡易な構成が実現されるようになる。また、上記構成によれば、スペクトルセンサによる同一の測定データに基づく各種情報の解析、管理が可能となり、各種情報に基づく上記行動予測にかかる処理負荷が軽減されるようにもなる。
【0032】
請求項11に記載の発明は、移動体の行動を予測する行動予測方法であって、前記移動体または同移動体の一部の物理的性質を検出し、該検出された物理的性質に基づきその特徴である属性を識別するとともに、同属性の識別の対象とされた移動体または同移動体の一部の温度を検出して前記移動体または同移動体の一部の属性情報及び温度情報を抽出するステップと、前記抽出した属性情報及び温度情報に基づいて前記移動体の行動を予測するステップとを含むことを要旨とする。
【0033】
上記方法によれば、移動体または同移動体の一部の物理的性質の特徴である属性に関する情報とその温度に関する情報とに基づいて移動体の行動が予測される。これら属性及び温度に関する情報は、移動体の行動との相関性が高いことから、検知対象とされた移動体の行動を高い信頼性のもとに予測することができるようになる。
【0034】
請求項12に記載の発明は、請求項11に記載の行動予測方法において、前記移動体または同移動体の一部の属性情報及び温度情報を抽出するステップにおいて、前記移動体の異なる複数の部分についてそれぞれ前記物理的性質及び温度を検出することで前記属性情報及び温度情報を抽出し、前記移動体の行動を予測するステップにおいて、前記異なる複数の部分について各々関連付けられた属性情報毎の各々の温度情報の組み合わせに基づいて移動体の行動を予測することを要旨とする。
【0035】
上記方法によれば、各部材の機能が反映される属性情報毎に固有の温度情報の組み合わせを通じた行動予測が実現される。これにより、上記識別情報及び温度情報に基づいて移動体の行動を予測する上で、予測可能な移動体の行動のバリエーションが拡大されるようになるとともに、移動体の行動の予測にかかる信頼性も好適に高められるようになる。
【0036】
請求項13に記載の発明は、請求項11または12に記載の行動予測方法において、前記移動体の行動を予測するステップにおいて、前記抽出された属性情報及び温度情報に基づき前記移動体の現状態を特定するとともに、この特定した移動体の現状態から同移動体の行動を予測することを要旨とする。
【0037】
移動体の現状態と、その後に遷移する移動体の状態(未来状態)とは相関性が強く、移動体の現状態さえ特定できれば、移動体の行動を経験的に予測することが可能である。このため、上記方法によるように、上記属性情報及び温度情報に基づき移動体の現状態を特定するとともに、この特定した移動体の現状態から同移動体の行動を予測することとすれば、移動体の現状態と未来状態との相関性を利用したより的確な行動予測を行うことができるようになる。
【0038】
請求項14に記載の発明は、自車両の周辺に存在する移動体の行動の予測に基づいてドライバに対する運転支援を行う運転支援装置であって、請求項1〜10のいずれか一項に記載の行動予測装置によって予測された移動体の行動に関する情報に基づき前記運転支援を行うことを要旨とする。
【0039】
上記構成によれば、上記属性情報及び温度情報に基づく自車両の周辺に存在する車両や人物等の移動体の検知はもとより、この検知された移動体が今後どのように行動するかを
高い信頼性のもとに予測することができるようになる。これにより、自車両の周辺に存在する移動体の行動の予測を通じて、その予測結果を踏まえた適切な運転支援を行うことができるようになり、運転支援にかかる信頼性が高められるようになる。
【0040】
請求項15に記載の発明は、請求項14に記載の運転支援装置において、前記運転支援の一つとして、前記予測された移動体の行動に関する情報に基づき、停止状態にある移動体が停止状態を継続するときの静止障害物に対する対応制御、及び停止状態にある移動体が停止状態から移動状態に推移するときの可動障害物に対する対応制御、のいずれか一方を選択的に実行することを要旨とする。
【0041】
上記構成によれば、上記静止障害物に対する対応制御として、停止状態にある移動体が停止状態を継続するとき、すなわち、同移動体が発進する可能性が低いときには、例えばこの移動体との必要最低限の車間距離を確保した上での経路の選択等の運転支援が行われる。また、上記可動障害物に対する対応制御として、停止状態にある移動体が停止状態から移動状態に推移するとき、すなわち、同移動体が発進する可能性が高いときや同移動体からの乗員の乗降の可能性が高いときには、例えば車両や乗員等の存在を自車両に対するリスクとして考慮した経路選択や減速案内、警告等の運転支援が行われる。このように上記構成によれば、自車両の周辺に存在する移動体の移動の有無に応じて各対応制御が実行されることにより、移動体の行動に応じた適切な運転支援が選択的に行われるようになる。これにより、自車両の周辺に存在する車両に対するリスクを好適に抑制しつつも、現在地から目的地に至るまでの旅行時間が短縮されるようになる。
【図面の簡単な説明】
【0042】
【図1】本発明の行動予測装置及び行動予測方法及び運転支援装置の第1の実施の形態について、同行動予測装置及び行動予測方法が適用される運転支援装置の概略構成を示すブロック図。
【図2】車両を構成する部品毎の温度情報と車両の現状態及び未来状態との関係の一例を示す図。
【図3】検知対象としての車両の状態推移の一例を示す図。
【図4】同実施の形態の行動予測手順及び運転支援手順を示すフローチャート。
【図5】本発明の行動予測装置及び行動予測方法及び運転支援装置の第2の実施の形態について、同行動予測装置及び行動予測方法が適用される運転支援装置の概略構成を示すブロック図。
【図6】車両を構成する排気管の温度情報及び同排気管から排出される排気ガス成分と、車両の現状態との一例を示す図。
【図7】車両を構成する部品毎の温度情報及び排気ガス濃度と、車両の現状態及び未来状態との関係の一例を示す図。
【図8】同実施の形態の行動予測手順及び運転支援手順を示すフローチャート。
【図9】本発明の行動予測装置及び行動予測方法及び運転支援装置の第3の実施の形態について、同行動予測装置及び行動予測方法が適用される運転支援装置の概略構成を示すブロック図。
【図10】車両を構成する部品毎の温度情報及び排気ガス濃度と、車両の現状態及び未来状態との関係の一例を示す図。
【図11】同実施の形態の行動予測手順及び運転支援手順を示すフローチャート。
【図12】本発明の行動予測装置及び行動予測方法及び運転支援装置の第4の実施の形態について、同行動予測装置及び行動予測方法が適用される運転支援装置の概略構成を示すブロック図。
【図13】(a)は、車両の状態遷移の一例を示すタイムチャート。(b)は、車両を構成する各システムの状態遷移の一例を示すタイムチャート。(c)は、車両の発進可能性の推移例を示すタイムチャート。
【図14】車両の発進可能性の推移と車両の未来状態との関係を示す図。
【図15】同実施の形態の行動予測手順及び運転支援手順を示すフローチャート。
【図16】本発明の行動予測装置及び行動予測方法及び運転支援装置の第5の実施の形態について、同行動予測装置及び行動予測方法が適用される運転支援装置の概略構成を示すブロック図。
【図17】同実施の形態の車両に対する乗員の乗降可能性の算出手順を示すフローチャート。
【図18】従来の車両検知装置の概略構成を示すブロック図。
【図19】同車両検知装置による監視範囲を模式的に示す図。
【発明を実施するための形態】
【0043】
(第1の実施の形態)
以下、本発明にかかる行動予測装置及び行動予測方法及び運転支援装置を具体化した第1の実施の形態について図1〜図4を参照して説明する。図1に、本実施の形態の行動予測装置及び行動予測方法が適用される運転支援装置の概略構成を示す。
【0044】
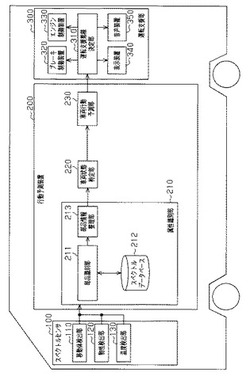
図1に示すように、この運転支援装置は、例えば自動車等の車両に搭載されており、車両や人物等の移動体のスペクトルデータを観測する一のスペクトルセンサ100を備えている。また、この運転支援装置は、スペクトルセンサ100にて取得されたスペクトルデータに基づいて移動体の行動を予測する行動予測装置200と、この行動予測装置200にて予測された移動体の行動に基づいてドライバに対する運転支援を行う運転支援部300とを備えている。
【0045】
このうち、スペクトルセンサ100は、自車両の周辺に存在する自動車等の各種車両や歩行者等の移動体の有無及び同移動体の位置や速度等を検出する移動体検出部110を備えている。また、スペクトルセンサ100は、移動体検出部110にて検出された移動体または同移動体の一部の物理的性質を検出する物性検出部120を備えている。さらに、スペクトルセンサ100は、移動体検出部110にて検出された移動体または同移動体の一部の温度を検出する温度検出部130を備えている。なお、本実施の形態では、物性検出部120及び温度検出部130により、移動体の異なる複数の部分についてそれぞれ属性及び温度が検出される。
【0046】
このように構成されるスペクトルセンサ100では、例えば自車両の周辺に存在する車両が上記移動体検出部110によって検知されると、この検知された車両を構成する排気管やタイヤ等の複数の部品の材質や色、形状等の物理的性質が上記物性検出部120にて検出される。また、上記移動体検出部110にて検出された車両を構成する排気管やタイヤ等の複数の部品の温度が上記温度検出部130にて検出される。
【0047】
そして、このように構成されるスペクトルセンサ100により測定対象とする車両の各種情報(スペクトルデータ)が取得されると、この取得された各種情報がそれぞれ上記行動予測装置200に入力される。なお、本実施の形態では、こうした移動体検出部110及び物性検出部120及び温度検出部130が一つのスペクトルセンサによって構成されるため、各種情報は検知対象とされた車両のスペクトルデータから抽出されることとなる。
【0048】
行動予測装置200は、上記物性検出部120により検出された検出対象の物理的性質に関する情報に基づき、その特徴である属性を識別する属性識別部210を備えている。また、行動予測装置200は、この属性識別部210により識別された属性情報と上記温度検出部130にて検出された温度情報とに基づいて検知対象とされた車両の現状態を特定する車両状態特定部220を備えている。さらに、行動予測装置200は、車両状態特
定部220にて特定された車両の現状態に基づいて同車両の行動を予測する車両行動予測部230を備えている。
【0049】
このうち属性識別部210は、上記物性検出部120による検出結果に基づいて検知対象とされた車両を構成する各部品の種類を識別する部品識別部211を備えている。また、属性識別部210は、スペクトルセンサ100によって観測されるスペクトルデータに対応して複数の種類のスペクトルデータが予め登録されているスペクトルデータベース212を備えている。このスペクトルデータベース212には、車両の運転を支援する上で属性の識別が必要とされる測定対象として、例えば、車両を構成する排気管、タイヤ、窓等の各部品や、ガードレール、アスファルト、人の顔肌等の物体のスペクトルデータが予め登録されている。すなわち、ある物体のスペクトルデータとは、その表面形状等といった物性に応じて特有のスペクトル反射率を有している。そして、こうした各測定対象毎のスペクトルデータを示す情報が、例えば波長毎に8ビットで反射率係数を表すテーブルの態様として、各物体毎に記憶されている。さらに、属性識別部210は、部品識別部211にて識別された各部品毎の属性情報と上記温度検出部130にて検出された温度情報とを関連付けるとともに、それら関連付けられた属性情報及び温度情報を整理する部品情報整理部213を備えている。
【0050】
このように構成される属性識別部210では、上記物性検出部120による検出結果が入力されると、この検出結果(スペクトルデータ)とスペクトルデータベース212に登録されている各物体毎のスペクトルデータとの対比が例えば正規化相互相関法等によって行われる。そして、部品識別部211では、各スペクトルデータの対比を通じて、物性検出部120による検出対象が人や車両等のいずれの物体であるか、さらには、車両等を構成する各部品がタイヤ、排気管や窓等のいずれであるかといった属性の識別が行われる。こうして、検知対象とされた車両の属性と同車両を構成する各部品の属性とが識別されると、各々識別された属性情報が上記部品情報整理部213に入力される。
【0051】
そして、部品情報整理部213では、部品識別部211にて各々識別された部品毎の属性情報と、該当する部品毎の温度情報とがそれぞれ関連付けられる。これにより、例えば、自車両の周辺に存在する他車両の各部品が排気管やタイヤであるとして各々識別されるとともに、それら識別された排気管やタイヤの温度情報が各部品毎に適宜関連付けられることとなる。なお、こうした属性情報と温度情報との関連付けは、例えば上記移動体検出部110によって検出された車両等の各種移動体を単位として、同移動体を構成する各部品毎に行われる。
【0052】
こうして各々識別された部品毎の属性情報と温度情報とが関連付けられると、それら関連付けられた属性情報及び温度情報と当該関連付けの対象とされた移動体の位置や速度等に関する移動情報とが上記車両状態特定部220に入力される。
【0053】
この車両状態特定部220では、まず上記移動体検出部110による検出結果に基づき、検知対象とされた車両が停止しているか否か、すなわち車両の現状態が走行状態(移動状態)もしくは停止状態のいずれであるかが特定される。そして、この検知対象とされた車両が停止状態にあると特定されたときには、上記関連付けられた各部品毎の属性情報及び温度情報の組み合わせを通じて、停止状態にある車両が停車を継続しているか、あるいは発進待機状態にあるかといった車両の現状態の特定が行われる。なお、こうした各部品毎の属性情報及び温度情報の組み合わせを通じた車両の現状態の特定は、例えば経験的に求められたマップデータ等の参照を通じて行われる。
【0054】
こうして、検知対象とされた自車両周辺に存在する車両の現状態が特定されると、この特定された車両の現状態に関する情報が上記車両行動予測部230に入力される。この車
両行動予測部230では、上記特定された車両の現状態に基づき、検知対象とされた停止状態にある車両が今後どのように行動するかが予測される。これにより、例えば、自車両の進行方向前方に停車中の車両がその後に発進する可能性が高い、もしくは、停止状態を継続する可能性が高いといった各種行動の予測が行われる。なお、こうした車両の現状態に基づく行動予測も、例えば経験的に求められたマップデータ等の参照を通じて行われる。こうして、検知対象とされた車両の行動が車両行動予測部230にて予測されると、この予測結果が上記運転支援部300に入力される。
【0055】
この運転支援部300は、上記車両行動予測部230による予測結果に基づきドライバに対する運転支援態様を決定する運転支援態様決定部310を備えている。運転支援態様決定部310には、車両のブレーキの制御等を行うブレーキ制御装置320と、車両のエンジンの制御等を行うエンジン制御装置330とが、CAN(Control Area
Network)などの車載ネットワークを介してそれぞれ通信可能に接続されている。また、運転支援態様決定部310には、例えば液晶ディスプレイによって構成され、車室内のセンターコンソール付近に設置される表示装置340が電気的に接続されていている。さらに、運転支援態様決定部310には、運転支援にかかる警報などの各種情報を出力するための出力装置として音声装置350が電気的に接続されていている。
【0056】
そして、運転支援態様決定部310では、例えば、ドライバによる目標地点の設定が行われると、旅行時間や燃料消費量が最小となる経路がダイクストラ法等に基づき探索される。また、運転支援態様決定部310では、上記予測された車両の行動に関する情報に基づき、
a,停止状態にある車両が停止状態を継続するときの静止障害物に対する対応制御、
b,停止状態にある車両が停止状態から走行状態に推移するときの可動障害物に対する対応制御、
のいずれか一方が選択的に実行される。これにより、上記属性情報及び温度情報に基づき予測された車両の行動に応じた的確な運転支援が選択的に実行されるようになる。
【0057】
一方、ブレーキ制御装置320は、各種センサからの信号に基づいて車両のブレーキ装置の制御を通じて当該車両に制動力を発生させる。エンジン制御装置330は、車両のエンジンの運転制御を行う装置であって、アクセル踏込量を検出するアクセルセンサや吸入空気量を検出するセンサ等が接続されるとともに、スロットルバルブの駆動回路、燃料噴射弁の駆動回路等の各種機器の駆動回路が接続されている。そして、エンジン制御装置330は、各種センサから入力した検出信号に基づいて把握されるエンジンの運転状態等を検知するとともに、上記各種機器の駆動回路の指令信号を出力する。こうしてエンジンの運転制御がエンジン制御装置330を通じて実施される。
【0058】
また、上記表示装置340では、運転支援態様決定部310から地図表示の画像データが入力されたり、ドライバに対して注意を喚起するために運転支援態様決定部310から出力された警告表示の画像データ等が入力され、各画像データに対応した画像が表示される。例えば、運転支援態様決定部310は、自車両の現在位置とその周辺の地図とを組み合わせた画像データを出力して、自車両の位置とその周辺の地図とが組み合わされた画像を表示装置に表示させる。このような構成により、表示装置340には、自車両の位置を表す自車位置マークや経路情報及び誘導情報などが道路地図とともに表示される。
【0059】
また一方、上記音声装置350では、運転支援態様決定部310から送信される信号に基づいて、ドライバへの注意喚起や音声案内が行われる。そして、運転支援態様決定部310では、上記探索された経路に基づいて、現在地から目的地に至るまでの推奨経路の案内等が音声装置350や表示装置340を介して行われる。
【0060】
このように構成される運転支援部300では、上記静止障害物に対する対応制御として、
走行中の自車両の進行方向前方に停車している車両が発進する可能性が低いと予測されたときには、例えば、この車両との必要最低限の車間距離を確保した上での経路の選択等の運転支援が行われる。この運転支援としては、例えば上記表示装置340による視覚的な減速案内、上記音声装置350による音声案内等が行われる。
【0061】
また、運転支援部300では、上記可動障害物に対する対応制御として、走行中の自車両の進行方向前方に停車している車両が発進する可能性が高いと予測されたときには、例えば、この車両の存在を自車両に対するリスクとして考慮した経路選択や減速案内、警告等の運転支援が行われる。この運転支援としては、例えば上記ブレーキ制御装置320やエンジン制御装置330によって予備制動を行う制御、表示装置340による視覚的な減速案内、音声装置350による音声案内等が行われる。これにより、例えば、自車両が追い越そうとしている停車中の車両が発進する可能性が高いものの、この車両に対する車間距離等が十分でないときには、同車両との車間距離を促す旨がドライバに対して通知されるようになる。
【0062】
このように上記構成によれば、自車両の周辺に存在する車両の行動の予測に基づき各対応制御が実行されることにより、自車両の周辺に存在する車両の行動に応じた適切な運転支援が選択的に行われるようになる。これにより、自車両の周辺に存在する車両に対するリスクを好適に抑制しつつも、現在地から目的地に至るまでの旅行時間が短縮されるようになる。
【0063】
以下、図2及び図3を参照して本実施の形態による移動体の行動予測方法を詳述する。なお、図2は、移動体としての車両を構成する部品毎(属性情報毎)の温度情報から特定され、予測される車両の現状態及び未来状態の関係の一例を示したものであり、図3は、こうした予測に基づく車両の状態推移の一例を示したものである。なお、本実施の形態では、図2に示すマップは上記車両状態特定部220及び車両行動予測部230に予め登録されている。
【0064】
図2に示すように、車両等を構成する部品の温度とは、その車両の状態に依存して変化する傾向にある。例えば、車両を構成するタイヤは、走行中に路面との摩擦により発熱することから走行中や停車直後はタイヤの温度が高い一方、停車から一定時間が経過するとタイヤの温度は低下する。また、車両を構成する排気管は、エンジンが動作中のときには排気熱により熱せられるため高温となる一方、エンジンの停止時には排気の停止に伴い次第に低温となる。このように、車両を構成する各部品の温度とは、それらの機能が反映された固有の温度となっており、部品毎の温度情報に基づけば車両の現状態を特定することができるようになるとともに車両の行動を予測することができるようになる。
【0065】
すなわち、図2に示すように、上記部品情報整理部213により部品毎に関連付けられた検知対象としての車両のタイヤの温度が低く、かつ、同車両の排気管の温度も低いときには、この車両の現状態は「停車継続中」であると特定できる。そしてこの場合には、当該車両が発進する可能性が低いと予測することができる。一方、この車両のタイヤの温度が低い場合であっても、同車両の排気管の温度が高いときには、同車両の現状態は「発進待機状態」にあると特定できる。そしてこの場合には、当該車両が発進する可能性が高いと予測することができる。
【0066】
また、上記関連付けられた検知対象としての車両のタイヤの温度が高く、同車両の排気管の温度が低いときには、この車両の現状態は「停車直後」であると特定できる。そしてこの場合には、当該車両が発進する可能性が低いと予測することができる。一方、この車
両のタイヤの温度が高く、かつ、同車両の排気管の温度も高いときには、この車両の現状態は「停車直後」もしくは「発進待機状態」であると特定できる。そしてこの場合には、当該車両が発進する可能性が高いと予測することができる。
【0067】
このように本実施の形態によれば、車両を構成する各部品、すなわち上記識別された属性情報毎に固有の温度情報の組み合わせを通じて、車両の現状態を特定することができるようになるとともに、この特定された車両の現状態に基づいて当該車両の行動を予測することができるようになる。このため、上記属性情報及び温度情報に基づく車両の現状態の特定及び予測を多観点から行うことができるようになる。これにより、特定可能な車両の現状態のバリエーションが拡大されるようになるとともに、より高精度な行動予測が可能となる。
【0068】
次に、こうした予測に基づく車両の状態遷移の一例を図3を参照して説明する。
図3に推移例Laとして示すように、自車両の周辺に他車両がタイミングt1(過去)からタイミングt2(現在)にかけて継続して停車していたとする。そして、この停車中の車両のタイヤの温度が低く、かつ、排気管の温度が低いときには、推移例Lbとして示すように、タイミングt2以降も停車状態を継続する可能性が高い、換言すれば、停車中の車両が発進する可能性が低いと予測することができる。
【0069】
一方、停車中の車両のタイヤの温度が低く、排気管の温度が高いときには、推移例Lcとして示すように、タイミングt2以降、停車状態から走行状態へと遷移する可能性が高い、換言すれば、停車中の車両が発進する可能性が高いと予測することができる。
【0070】
以下、本実施の形態による移動体の行動予測手順及び運転支援手順を図4を参照して総括する。
図4に示すように、まずステップS100において、上記移動体検出部110によって自車両の周辺における他車両の存在の有無が検出される。次いで、この検出結果に基づき自車両の周辺に他車両が存在していると判断されると、この他車両の速度や位置等に基づき当該車両が停止しているか否かが判断される(ステップS101:YES、S102)。
【0071】
こうして、検知対象とされた他車両が停止していると判断されたときには、この停止中の車両を構成する排気管やタイヤ等の各部品の物理的性質が上記物性検出部120によって検出される(ステップS103)。また併せて、この物理的性質の検出の対象とされた各部品の温度が上記温度検出部130によって検出される(ステップS104)。
【0072】
次いで、物性検出部120による検出結果に基づいて検知対象とされた車両の各部品の属性が識別され、当該部品が排気管やタイヤ、窓等のいずれの部品であるかが識別される(ステップS105)。こうして検知対象とされた車両の各部品の識別が行われると、各々識別された各部品(属性情報)に該当する温度情報が関連付けられる(ステップS106)。
【0073】
そして、それら関連付けられた部品毎の温度情報の組み合わせを通じて、検知対象とされた車両の現状態が特定され(ステップS107)、この特定された車両の現状態に基づき当該車両が発進する可能性が予測される(ステップS108)。
【0074】
こうした予測結果に基づき、停車中の車両が発進する可能性が低いと判断されたときには、静止障害物に対する対応制御が上記ブレーキ制御装置320、エンジン制御装置330、表示装置340、音声装置350等を介して実行される(ステップS109:YES、S110)。
【0075】
一方、上記予測結果に基づき、停車中の車両が発進する可能性が高いと判断されたときには、可動障害物に対する対応制御が上記ブレーキ制御装置320、エンジン制御装置330、表示装置340、音声装置350等を介して実行される(ステップS109:NO、S111)。
【0076】
また一方、自車両の周辺に他車両が存在していない場合(ステップS101:NO)、及び自車両の周辺に存在している車両が走行状態にある場合(ステップS102:NO)には、この車両に対する行動予測を行うことなく、再度、上記移動体検出部110による自車両の周辺の車両の存在の有無の検知が行われるようになる。
【0077】
そして、こうした自車両の周辺に存在する停止車両の検出、及び同検出された車両の現状態の特定、及び同特定された車両の現状態に基づく行動予測が適宜行われることにより、自車両の周辺に存在する車両の行動を踏まえた運転支援が適宜実行されるようになる。これにより、自車両の周辺に存在する車両に対するリスクを好適に抑制しつつも、現在地から目的地に至るまでの旅行時間が短縮されるようになる。
【0078】
以上説明したように、本実施の形態にかかる行動予測装置及び行動予測方法及び運転支援装置によれば、以下の効果が得られるようになる。
(1)自車両の周辺に存在する車両を構成する各部品の物理的性質を検出するとともに同検出された物理的性質に基づき各部品の属性を識別し、同属性の識別の対象とされた車両の各部品の温度を検出することとした。そして、属性が識別された各部品毎の属性情報と該当する温度情報とに基づいて、検知対象とされた車両の行動を予測することとした。このため、車両の状態に依存して変化する車両の各部品の温度情報に基づいて検知対象とされた車両の行動を予測することができるようになる。これにより、行動予測装置及び運転支援装置として簡易な構成でありながら、検知した車両の行動を高い信頼性のもとに予測することができるようになる。
【0079】
(2)上記物性検出部120及び温度検出部130によって車両の異なる複数の部分についてそれぞれ物理的性質を検出してその属性を識別するとともに、異なる複数の部分についてそれぞれ温度を検出することとした。そして、各々関連付けられた属性情報毎の温度情報の組み合わせを通じて、検知対象とされた車両の行動を予測することとした。これにより、属性情報毎に固有の温度情報の組み合わせを通じて、予測可能な車両の行動のバリエーションが拡大されるようになるとともに、より高精度な車両の行動予測が実現されるようになる。
【0080】
(3)上記属性識別部210により識別された属性情報と上記温度検出部130により検出された温度情報とに基づき車両の現状態を特定するとともに、この特定した車両の現状態から同車両の行動を予測することとした。これにより、車両の現状態と未来の状態との相関性を利用した車両の行動予測が実現されるようになる。
【0081】
(4)上記移動体検出部110及び物性検出部120及び温度検出部130を、一のスペクトルセンサ100によって構成することとした。このため、自車両の周辺における車両等の存在の有無はもとより、この車両を構成する各部品の属性及び温度を一つのセンサのみによって取得することができるようになる。これにより、上記運転支援装置としてより簡易な構成が実現されるようになる。また、こうした構成によれば、スペクトルセンサ100により取得される同一のスペクトルデータに基づく各種情報の解析、管理が可能となり、検知対象とされた各部品の属性情報及び温度情報の抽出やそれら属性情報と温度情報との関連付けをはじめとした各種処理を円滑に行うことができるようになる。
【0082】
(5)上記行動予測装置200によって予測された車両の行動に関する情報に基づきドライバに対する運転支援を行うこととした。これにより、自車両の周辺に存在する車両の行動の予測を通じて、その予測結果を踏まえた適切な運転支援を行うことができるようになり、運転支援にかかる信頼性が高められるようになる。
【0083】
(6)上記運転支援の一つとして、上記予測された車両の行動に関する情報に基づき、停止状態にある車両が停止状態を継続するときの静止障害物に対する対応制御、及び停止状態にある車両が停止状態から走行状態に推移するときの可動障害物に対する対応制御、のいずれか一方を選択的に実行することとした。運転支援装置としてこのような構成によれば、自車両の周辺に停止している車両が発進する可能性が低いときには、この車両との必要最低限の車間距離を確保した上での経路の選択等の運転支援が選択的に実行されるようになる。また、停止状態にある車両が発進する可能性が高いときには、この車両の存在を自車両に対するリスクとして考慮した経路選択や減速案内、警告等の運転支援が選択的に実行されるようになる。これにより、自車両の周辺に存在する車両に対するリスクを好適に抑制しつつも、現在地から目的地に至るまでの旅行時間が短縮されるようになる。
【0084】
(第2の実施の形態)
以下、本発明にかかる行動予測装置及び行動予測方法及び運転支援装置を具体化した第2の実施の形態について図5〜図8を参照して説明する。図5に、本実施の形態の行動予測装置及び行動予測方法が適用される運転支援装置の概略構成を示す。なお、この第2の実施の形態は、検知対象とする車両の周辺に存在する気体成分に関する情報を加味して当該車両の行動を予測するものであり、その基本的な構成は先の第1の実施の形態と共通になっている。
【0085】
図5は、先の図1に対応する図として、この第2の実施の形態にかかる行動予測装置及び行動予測方法が適用される運転支援装置の概略構成を示したものである。なお、この図5において、先の図1に示した各要素と同一の要素についてはそれぞれ同一の符号を付して示しており、それら要素についての重複する説明は割愛する。
【0086】
図5に示すように、本実施の形態のスペクトルセンサ100は、検知対象とする車両の周辺に存在する排気ガス等の気体成分を検出する気体成分検出部140をさらに備えている。また、本実施の形態の属性識別部210は、気体成分検出部140にて検出された気体成分情報と上記部品識別部211にて識別された部品毎の属性情報とに基づき、検知対象とされた車両のエンジンの状態を識別するエンジン状態識別部214をさらに備えている。なお、こうした気体成分もスペクトルセンサ100により観測されたスペクトルデータから抽出される。
【0087】
このように構成される運転支援装置では、例えば自車両の周辺に存在する車両が上記移動体検出部110によって検知されると、この検知された車両や同車両を構成する排気管やタイヤ等の各部品の材質や色、形状等の物理的性質が上記物性検出部120にて検出される。また、上記移動体検出部110にて検出された車両や同車両を構成する排気管やタイヤ等の各部材の温度情報が上記温度検出部130にて検出される。
【0088】
そして、上記物性検出部120によって検知対象とされた車両の各部品の物理的性質が検出されると、この車両を構成する各部品のうちの排気管の位置が上記部品識別部211による識別結果に基づき特定される。こうして検知対象とされた車両の排気管の位置が特定されると、この排気管周辺の気体成分が上記気体成分検出部140によって検出される。そして、この気体成分検出部140により検出された気体成分情報は上記エンジン状態識別部214に入力される。
【0089】
エンジン状態識別部214では、気体成分検出部140にて検出された気体成分情報に基づいて、検知対象とされた車両の排気管から排気ガスが排出されているか否かが識別される。そして、エンジン状態識別部214では、上記気体成分情報に基づき当該車両の排気管から排気ガスが排出されていないと判断されたときは、当該車両のエンジンが停止状態にあると識別される。一方、エンジン状態識別部214では、上記気体成分情報に基づき当該車両の排気管から排気ガスが排出されていると判断されたときは、当該車両のエンジンが稼働状態にあると識別されるとともに、排気ガス中のNox濃度に基づきエンジンの回転数が識別される。
【0090】
こうして、検知対象とされた車両のエンジンの状態が識別されると、この識別結果が上記車両状態特定部220に入力される。そして、車両状態特定部220では、上記エンジン状態識別部214にて識別されたエンジンの状態を加味して、検知対象とされた車両の現状態が特定される。これにより、車両状態特定部220では、検知対象とする車両の各部品毎の温度情報のみならず、同車両のエンジンの状態を加味して車両の現状態を特定することができるようになり、検知対象とする車両の現状態をより詳細に分類することができるようになる。
【0091】
そして、こうした車両状態特定部220による特定結果は、上記車両行動予測部230に入力され、先の第1の実施の形態と同様、検知対象とされた車両の現状態に基づく行動予測、及び運転支援が適宜実行されるようになる。
【0092】
以下、図6及び図7を参照して本実施の形態による移動体の行動予測方法を詳述する。なお、図6は、車両を構成する排気管の温度情報と同排気管から排出される排気ガス成分とに基づき特定される車両の現状態の一例を示したものである。また、図7は、先の図2に対応する図として、本実施の形態による行動予測方法に基づいて車両を構成する部品毎(属性情報毎)の温度情報及び気体成分情報から特定され、推定される車両の現状態及び未来状態の関係の一例を示したものである。なお、こうした図6及び図7に示すマップは、上記車両状態特定部220及び車両行動予測部230に予め登録されている。
【0093】
図6に示すように、エンジン等を駆動源とした車両は、その走行時に排気ガス等の気体を排出することが普通であり、こうした排気ガス中のNox(窒素酸化物)の濃度はエンジンの回転数に比例する。このように、検知対象とする車両の周辺に存在する気体成分とは、当該車両のエンジンの稼働状態が反映されるものである。このため、検知対象とする車両の周辺で検出された気体成分情報に基づけば、車両の現状態をより詳細に特定することができるようになるとともに同車両の行動をより詳細に予測することができるようになる。
【0094】
すなわち、図6に示すように、上記部品情報整理部213により部品毎に関連付けられた検知対象としての車両の排気管の温度が低く、この排気管の周辺に排気ガス成分が存在しないときには、この車両の現状態は「一定時間エンジンが停止している」状態であると特定できる。そしてこの場合には、当該車両が発進する可能性が無いものとして予測することができる。また、この車両の排気管の温度が高く、同排気管の周辺に排気ガス成分が存在しないときには、この車両の現状態は「エンジンが停止した直後」の状態であると特定できる。そしてこの場合にも、エンジンが停止しているために当該車両が発進する可能性が無いものとして予測することができる。
【0095】
また、検知対象としての車両の排気管の温度が低いものの、この排気管の周辺に排気ガス成分が存在し、同排気ガス成分中のNox濃度が低いときには、この車両の現状態は、「エンジン始動直後、かつ、同エンジンが低回転で稼働している」状態であると特定できる。そしてこの場合には、当該車両が発進する可能性がやや高い(発生可能性:中)と予
測することができる。また、同様に車両の排気管の周辺に存在する排気ガス成分中のNox濃度が低いものの、同排気管の温度が高いときには、この車両の現状態は、「エンジンが始動されてから一定時間が経過し、かつ、同エンジンが低回転で稼働している」状態であると特定できる。そしてこの場合にも、当該車両が発進する可能性がやや高い(発生可能性:中)と予測することができる。
【0096】
さらに、検知対象としての車両の排気管の温度が低く、この排気管の周辺に存在する排気ガス成分中のNox濃度が高いときには、この車両の現状態は、「エンジン始動直後、かつ、同エンジンが高回転で稼働している」状態であると特定できる。そしてこの場合には、当該車両が発進する可能性が高いと予測することができる。また同様に、車両の排気管の周辺に存在する排気ガス成分中のNox濃度が高く、かつ、同排気管の温度も高いときには、この車両の現状態は、「エンジンが始動されてから一定時間が経過し、かつ、同エンジンが高回転で稼働している」状態であると特定できる。そしてこの場合にも、当該車両が発進する可能性が高いと予測することができる。
【0097】
このように本実施の形態によれば、排気管の温度が同一の温度であっても、その温度情報に同排気管の周辺に存在する気体成分情報を加味することにより、換言すれば、各々識別された部品毎の温度情報にさらに気体成分情報を組み合わせることにより、検知対象とされた車両の現状態をより詳細に特定することができるようになる。特に、検知対象とされた車両の排気管の温度が高いときには、その温度情報のみによっては同車両が停止直後(発進可能性:低)なのか、あるいは、エンジンが始動された直後(発進可能性:高)なのかを判別することは困難である。しかし、本実施の形態によれば、検知対象とする車両の現状態を特定する上で上記気体成分情報を加味することにより、当該車両が停止直後なのか、あるいは、エンジンが始動された直後なのかも判別することができるようになる。
【0098】
そして、図7に、先の図2に対応する図として上記気体成分情報を加味して特定され、推定される車両の現状態及び未来状態の関係の一例を示すように、検知対象とする車両の周辺に存在する気体成分情報として同車両から排出される排気ガス成分中のNox濃度が加味された分、車両の現状態がより詳細に分類されるようになる。そのため、検知対象とされた車両の詳細な分類結果に基づくきめ細かい行動予測が実現されるようになり、上記運転支援態様決定部310では、各々予測された車両の行動に応じた的確な運転支援が実行されるようになる。
【0099】
また、本実施の形態では、図7に示すように、検知対象とする車両の排気管から排出される排気ガス成分中のNox濃度が高いときには、換言すれば、当該車両のエンジンが高回転であるときには、当該車両のドライバに発進意図があると推定することができる。このため、検知対象とされた車両から乗員が乗降する可能性が低いと推定することができる。これにより、上記車両行動予測部230では、検知対象とされた車両から乗員の乗降する可能性が低いと推定されたときには、当該車両のドアが開閉する可能性が低い予測することができる。そして、上記運転支援態様決定部310では、この予測結果に基づき、検知対象とされた車両のドアの開閉可能性をも考慮した運転支援として、例えば当該車両との車間距離等の案内が行われるようになる。
【0100】
以下、本実施の形態による移動体の行動予測手順及び運転支援手順を図8を参照して総括する。
図8に示すように、本手順では、まずステップS200において上記移動体検出部110により自車両の周辺における他車両の存在の有無が検出される。次いで、この検出結果に基づき自車両の周辺に他車両が存在していると判断されると、この他車両の速度や位置等に基づき当該車両が停止しているか否かが判断される(ステップS201:YES、S202)。
【0101】
こうして、検知対象とされた他車両が停止していると判断されたときには、この停止中の車両を構成する排気管やタイヤ等の各部品の物理的性質が上記物性検出部120によって検出される(ステップS203)。また併せて、この物理的性質の検出の対象とされた各部品の温度が上記温度検出部130によって検出される(ステップS204)。
【0102】
次いで、物性検出部120による検出結果に基づいて検知対象とされた車両を構成する各部品の属性が識別され、当該部品が排気管やタイヤ、窓等のいずれの部品であるかが識別される(ステップS205)。
【0103】
そして、本実施の形態では、この識別結果に基づき検知対象とされた車両の排気管が識別され、その位置が特定されると、この排気管の周辺に存在する気体成分が上記気体成分検出部140によって検出される(ステップS206)。こうして気体成分情報が検出されると、この気体成分情報が検知対象とされた車両の排気管から排出される排気ガスであるとして関連付けられるとともに、各々識別された各部品(属性情報)に該当する温度情報が関連付けられる(ステップS207)。
【0104】
そして、上記検出された気体成分情報のうちのNox濃度に基づき検知対象とされた車両のエンジンの稼働状態が識別される(ステップS208)。次いで、この識別されたエンジンの稼働状態と上記関連付けられた部品毎の温度情報との組み合わせを通じて、検知対象とされた車両の現状態が特定され(ステップS209)、この特定された車両の現状態に基づき当該車両が発進する可能性が予測される(ステップS210)。この結果、先の図7に示したように、検知対象とされた車両が発進する可能性が、それぞれ「発進可能性:無」、「発進可能性:中」、「発進可能性:高」として予測されるようになる。
【0105】
こうした予測結果に基づき、停車中の車両の発生可能性が「無」であると判断されたときには、静止障害物に対する対応制御が上記ブレーキ制御装置320、エンジン制御装置330、表示装置340、音声装置350等を介して実行される(ステップS211:YES、S212)。
【0106】
一方、上記予測結果に基づき、停車中の車両の発進可能性が「中」もしくは「高」であると判断されたときには、可動障害物に対する対応制御が上記ブレーキ制御装置320、エンジン制御装置330、表示装置340、音声装置350等を介して実行される(ステップS211:NO、S213)。
【0107】
また一方、自車両の周辺に他車両が存在していない場合(ステップS201:NO)、及び自車両の周辺に存在している車両が走行状態にある場合(ステップS202:NO)には、この車両に対する行動予測を行うことなく、再度、上記移動体検出部110による自車両の周辺の車両の存在の有無の検知が行われるようになる。
【0108】
そして、こうした自車両の周辺に存在する停止車両の検出、及び同検出された車両の現状態の特定、及び同特定された車両の現状態に基づく行動予測が適宜行われることにより、自車両の周辺に存在する車両の行動を踏まえた運転支援が適宜実行されるようになる。これにより、自車両の周辺に存在する車両に対するリスクを好適に抑制しつつも、現在地から目的地に至るまでの旅行時間が短縮されるようになる。
【0109】
以上説明したように、本実施の形態にかかる行動予測装置及び行動予測方法及び運転支援装置によれば、上記(1)〜(6)の効果が得られるとともに、さらに以下の効果が得られるようになる。
【0110】
(7)検知対象とする車両の周辺に存在する気体成分を検出するとともに、この検出された気体成分情報を加味して当該車両の行動を予測することとした。このため、検知対象とされた車両の行動を、同車両から排出される排気ガス成分といった観点からも予測することができるようになる。これにより、上記車両の行動予測にかかる精度がより高められるようになる。
【0111】
(8)検知対象とされた車両の周辺に存在する気体成分情報に基づき、当該車両のエンジンの状態を識別することとした。そして、この識別結果を加味して検知対象とされた車両の現状態を特定するとともに、この特定された車両の現状態に基づいて同車両の行動を予測することとした。これにより、検知対象とされた車両の現状態をより詳細に分類、特定することができるようになり、この特定された車両の現状態に基づくきめ細かい行動予測が実現されるようになる。またこれにより、部品毎の温度情報のみによっては検知対象とされた車両の現状態を特定することが困難な場合であっても、その状態を特定することができるようになり、この特定された車両の現状態に基づく行動予測にかかる信頼性が好適に高められるようにもなる。
【0112】
(第3の実施の形態)
以下、本発明にかかる行動予測装置及び行動予測方法及び運転支援装置を具体化した第3の実施の形態について図9〜図11を参照して説明する。図9に、本実施の形態の行動予測装置及び行動予測方法が適用される運転支援装置の概略構成を示す。なお、この第3の実施の形態は、上記属性情報及び温度情報に基づき検知対象とする車両に搭乗する乗員の有無を推定するとともに、この推定結果も加味して当該車両の行動を予測するものであり、その基本的な構成は先の第2の実施の形態と共通になっている。
【0113】
図9は、先の図1及び図5に対応する図として、この第3の実施の形態にかかる行動予測装置及び行動予測方法が適用される運転支援装置の概略構成を示したものである。なお、この図9において、先の図1及び図5に示した各要素と同一の要素についてはそれぞれ同一の符号を付して示しており、それら要素についての重複する説明は割愛する。
【0114】
図9に示すように、本実施の形態の行動予測装置200は、上記温度検出部130にて検出された温度情報と上記部品識別部211にて識別された部品毎の属性情報とに基づき、検知対象とされた車両に搭乗する乗員の有無を推定する乗員有無推定部240をさらに備えている。
【0115】
このように構成される運転支援装置では、例えば自車両の周辺に存在する車両が上記移動体検出部110によって検知されると、この検知された車両や同車両を構成する排気管やタイヤ等の各部品の材質や色、形状等の物理的性質が上記物性検出部120にて検出される。また、上記移動体検出部110にて検出された車両や同車両を構成する排気管やタイヤ等の各部材の温度情報が上記温度検出部130にて検出される。
【0116】
そして、先の第2の実施の形態と同様、上記属性識別部210により検知対象とされた車両を構成する各部品の識別や同車両のエンジンの稼働状態の識別等が行われると、上記車両状態特定部220では、各々識別された結果に基づいて検知対象とされた車両の現状態が特定される。
【0117】
さらに、本実施の形態では、上記乗員有無推定部240によって、各々関連付けられた車両の部品毎の温度情報のうちの同車両の窓の温度情報に基づいて当該車両に搭乗する乗員の有無が推定される。詳述すると、乗員有無推定部240では、検知対象とされた車両の窓の領域の温度情報に基づき、車室内の温度が例えば「0℃」以下や「45℃」以上などのように乗員の存在に適さない温度であると判断されたときには、同車両に乗員が存在
する可能性が低いと推定される。また、乗員有無推定部240では、検知対象とされた車両の窓の領域の温度情報に基づき、車室内に人物の体温と同等の温度領域が存在すると判断されたときには、同車両に乗員が存在している可能性が高いと推定される。
【0118】
そして、こうした乗員有無推定部240による推定結果が上記車両行動予測部230に入力される。こうして車両行動予測部230では、乗員有無推定部240にて推定された乗員の推定結果を加味して検知対象とされた車両の行動が予測され、先の第1及び第2の実施の形態と同様、検知対象とされた車両の行動予測に応じた運転支援が適宜実行されるようになる。
【0119】
以下、図10を参照して本実施の形態による移動体の行動予測方法を詳述する。なお、この図10は、先の図2及び図7に対応する図として、本実施の形態による行動予測方法に基づいて車両の部品毎(属性情報毎)の温度情報及び気体成分情報から特定され、推定される車両の現状態及び未来状態の関係の一例を示したものである。また、こうした図10に示すマップも、上記車両状態特定部220及び車両行動予測部230に予め登録されている。
【0120】
図10から明かなように、本実施の形態では、上記乗員有無推定部240により乗員の有無が推定された分、同車両の行動の予測基準が拡大されるようになる。すなわち、同図10に示すように、検知対象とされた車両の窓の温度情報に基づき、同車両の室内の温度が乗員の存在に適さない温度であると判断されたときには、この車両には乗員が存在していないと判断できる。このため、検知対象とされた車両から乗員が乗降する可能性が無く、同車両のドアが開閉される可能性が無いものとして予測できる。またこのときには、検知対象とされた車両には同車両を操作する乗員が存在していないために、当該車両が発進する可能性が無いものとして一様に予測することも可能である。これにより、検知対象とされた車両に対する乗員の有無の判別を通じて車両の行動をより高精度に予測することができるようになり、上記運転支援態様決定部310では、各々予測された車両の行動に応じた的確な運転支援が実行されるようになる。
【0121】
以下、本実施の形態による移動体の行動予測手順及び運転支援手順を図11を参照して総括する。
図11に示すように、本手順では、まずステップS200において上記移動体検出部110により自車両の周辺における他車両の存在の有無が検出される。そして、先の第2の実施の形態と同様に、検知対象とされた車両を構成する各部品の識別、及び同識別された部品毎の温度情報の関連付け、及び車両のエンジンの稼働状態の識別等が行われ、それらの識別結果に基づいて検知対象とされた車両の現状態が特定される(ステップS201〜S209)。
【0122】
そして、本実施の形態では、まずステップS209Aにおいて、上記部品情報整理部213により部品毎に関連付けられた各温度情報から、検知対象とされた車両の窓の領域の温度情報が抽出される。次いで、この抽出された窓の領域の温度情報に基づいて、検知対象とされた車両の乗員の有無が推定される(ステップS209B)。なお、こうした乗員の有無の推定は、例えば、上記抽出された温度情報から求められる車室内の温度が、乗員の存在に不適切な温度であるか否かを判別する閾値以上であるか否か、もしくは同閾値以下であるか否かの判別を通じて行われる。また、各閾値としては、例えば「45℃」や「0℃」といった温度が設定されている。
【0123】
次いで、上記乗員有無推定部240によって乗員の有無が推定されると、この推定結果と上記特定された車両の現状態とに基づいて検知対象とされた車両が発進する可能性が予測される(ステップS210)。この結果、先の図10に示したように、検知対象とされ
た車両が発進する可能性が、それぞれ「発進可能性:無」、「発進可能性:中」、「発進可能性:高」として予測されるようになる。また併せて、車両に搭乗している乗員の乗降可能性が、それぞれ「乗降可能性:無」、「乗降可能性:低」として予測されるようになる。
【0124】
そして本実施の形態においても、上記予測結果に基づき停車中の車両の発生可能性が「無」であると判断されたときには、静止障害物に対する対応制御が上記ブレーキ制御装置320、エンジン制御装置330、表示装置340、音声装置350等を介して実行される(ステップS211:YES、S212)。
【0125】
一方、上記予測結果に基づき、停車中の車両の発進可能性が「中」もしくは「高」であると判断されたときには、可動障害物に対する対応制御が上記ブレーキ制御装置320、エンジン制御装置330、表示装置340、音声装置350等を介して実行される(ステップS211:NO、S213)。
【0126】
また一方、自車両の周辺に他車両が存在していない場合(ステップS201:NO)、及び自車両の周辺に存在している車両が走行状態にある場合(ステップS202:NO)には、この車両に対する行動予測を行うことなく、再度、上記移動体検出部110による自車両の周辺の車両の存在の有無の検知が行われるようになる。
【0127】
そして、こうした自車両の周辺に存在する停止車両の検出、及び同検出された車両の現状態の特定、及び同特定された車両の現状態に基づく行動予測が適宜行われることにより、自車両の周辺に存在する車両の行動を踏まえた運転支援が適宜実行されるようになる。これにより、自車両の周辺に存在する車両に対するリスクを好適に抑制しつつも、現在地から目的地に至るまでの旅行時間が短縮されるようになる。
【0128】
以上説明したように、本実施の形態にかかる行動予測装置及び行動予測方法及び運転支援装置によれば、上記(1)〜(8)の効果が得られるとともに、さらに以下の効果が得られるようになる。
【0129】
(9)検知対象とされた車両の窓の領域の温度情報に基づき同車両に搭乗する乗員の有無を推定し、この推定結果を加味して同車両の行動を予測することとした。これにより、検知対象とされた車両の行動を決定する乗員の有無に基づいた行動予測が可能となり、この乗員により操作される車両の行動をより高い信頼性のもとに予測することができるようになる。
【0130】
(第4の実施の形態)
以下、本発明にかかる行動予測装置及び行動予測方法及び運転支援装置を具体化した第4の実施の形態について図12〜図15を参照して説明する。図12に、本実施の形態の行動予測装置及び行動予測方法が適用される運転支援装置の概略構成を示す。なお、この第4の実施の形態は、上記属性情報及び温度情報の推移から特定される車両の状態の変化傾向に基づいて当該車両の行動を予測するものであり、その基本的な構成は先の第3の実施の形態と共通になっている。
【0131】
図12は、先の図1、図5、図9に対応する図として、この第4の実施の形態にかかる行動予測装置及び行動予測方法が適用される運転支援装置の概略構成を示したものである。なお、この図12において、先の図1、図5、図9に示した各要素と同一の要素についてはそれぞれ同一の符号を付して示しており、それら要素についての重複する説明は割愛する。
【0132】
図12に示すように、本実施の形態の行動予測装置200は、上記部品情報整理部213にて関連付けられた部品毎(属性情報)の温度情報を漸次記憶する記憶手段としての部品情報記憶部250をさらに備えている。また、行動予測装置200は、部品情報記憶部250に記憶された部品毎の温度情報に基づいて、検知対象とされた車両の状態の変化傾向を算出する状態変化傾向算出部260をさらに備えている。
【0133】
このように構成される運転支援装置では、例えば自車両の周辺に存在する車両が上記移動体検出部110によって検知されると、この検知された車両や同車両を構成する排気管やタイヤ等の各部品の材質や色、形状等の物理的性質が上記物性検出部120にて検出される。また、上記移動体検出部110にて検出された車両や同車両を構成する排気管やタイヤ等の各部材の温度情報が上記温度検出部130にて検出される。
【0134】
そして、本実施の形態では、検知対象とされた車両の各部品の識別及び同識別された部品に対する温度情報の関連付けが上記部品識別部211及び部品情報整理部213にて行われると、この部品情報整理部213により整理された部品毎の温度情報が上記部品情報記憶部250に漸次入力される。そして、この部品情報記憶部250では、例えば検知対象とされた車両を単位として、この車両を構成する部品毎の温度情報が漸次記憶される。そして、こうした部品情報記憶部250に記憶された部品毎の温度情報は、上記状態変化傾向算出部260による状態変化傾向の算出に供される。また、状態変化傾向算出部260には、上記乗員有無推定部240にて推定された乗員の有無の推定結果と上記エンジン状態識別部214にて識別された車両のエンジンの稼働状態に関する情報とが適宜入力される。
【0135】
そして、状態変化傾向算出部260では、上記部品情報記憶部250に記憶された所定時間での部品毎の温度情報の推移と、各々入力された乗員の有無の推定結果及びエンジンの稼働状態に関する情報とに基づいて、検知対象とされた車両の状態の変化傾向が算出される。なお、本実施の形態では、検知対象とされた車両の状態の変化傾向として、停止状態にある車両が行動を開始する可能性の推移が求められる。すなわち本実施の形態では、上記部品毎に関連付けられた温度情報、及び乗員の有無の推定結果、及びエンジンの稼働状態に関する情報に基づいて、停止状態にある車両が行動を開始する可能性(発進可能性)の推移が先の図10等に示したマップデータの参照を通じて求められる。
【0136】
こうして、検知対象とされた車両の状態の変化傾向が算出されると、この算出結果が上記車両行動予測部230に入力される。そして、車両行動予測部230では、この車両の状態の変化傾向に基づいて検知対象とされた車両の行動が予測され、先の第1〜第3の実施の形態と同様、検知対象とされた車両の行動予測に応じた運転支援が適宜実行されるようになる。
【0137】
以下、図13を参照して本実施の形態による移動体の行動予測方法を詳述する。なお、この図13において図13(a)は、ある車両の状態遷移の一例を示しており、図13(b)は、同車両の機械的な状態の推移例を示しており、図13(c)は、同車両が走行を開始する可能性の推移例を示している。
【0138】
図13(a)及び(b)に示すように、通常、停止状態にある車両が走行を開始するまでには、車両に搭載された上記ブレーキ制御装置320やエンジン制御装置330をはじめとする各種システムの状態が遷移する。
【0139】
すなわち、図13(a)及び(b)に示すように、タイミングt0においてドライバによるエンジンのスタート操作が行われ、この操作がタイミングt1にて終了すると、これに伴って車両の各種機器を統括する制御システムが起動し、セルモータが作動するといっ
た態様で各種システムの状態が遷移する(期間T1)。すなわち、この期間T1が車両の状態が変化する遷移期間となる。一方、後続する期間T2、すなわちセルモータの作動に伴ってエンジンが駆動して以降は、車両の状態がアイドリング状態となり各種システムの状態が維持される。すなわち、この期間T2が車両の状態が安定する非遷移期間となる。そして、アイドリング状態となったことにより車両の状態が安定すると、例えばタイミングt3においてドライバによるブレーキ解除操作やアクセル操作等の各種操作が行われる。これにより、タイミングt4において、車両の状態が停止状態から走行状態へと遷移するようになる。
【0140】
また、この間の車両の発進可能性の推移を図13(c)に示すように、例えば期間T0においてエンジンが停止状態であったために「低」とされていた発進可能性は、後続する期間T1では制御システムの起動やセルモータの作動に伴って「中」へと増大する。すなわち、車両の状態が変化する期間T1では、車両の状態の変化に伴って同車両が発進する可能性も「低」から「中」へと変化することとなる。
【0141】
一方、期間T2では、車両のアイドリング状態が継続しているために、同車両の発進可能性は継続して「高」となっている。ただし、車両の状態がアイドリング状態へと推移した直後(タイミングt2)と、アイドリング状態へと推移してから期間T2経過後(タイミングt4)とでは、車両が発進する可能性はいずれも「高」となっているものの、車両が走行を開始するまでに期間T2のずれを有している。このため、車両の状態がアイドリング状態へと推移した直後と、アイドリング状態が継続しているときとでは、アイドリング状態が継続しているときの方が停止状態にある車両が走行を開始するまでの時間が短いことが確認できる。すなわち、車両の現状態に対して、同車両の過去の状態との間で変化が生じているときと、同車両の過去の状態との間で変化が生じていないときとでは、車両の状態が維持されているときの方が同車両の発進可能性が高いことが確認できる。
【0142】
そこで本実施の形態では、車両の状態の変化傾向として同車両の部品毎の温度情報やエンジンの稼働状態等から同車両の発進可能性の変化傾向を求めるとともに、この変化傾向に基づいて車両の行動を予測することとする。
【0143】
図14に、車両の発進可能性の変化傾向と同変化傾向から求められた車両の行動の予測結果との関係を示す。
図14に示すように、検知対象とされた車両の部品毎の温度情報やエンジンの稼働状態等に基づき同車両の現時点での発進可能性が高いと判別されたとすると、同車両の発進可能性が維持されているときの方が、同車両の発進可能性が「中」から「高」へと増大して変化したときよりも発進可能性が高い。また同様に、ある時点での車両の発止可能性がやや高い(発進可能性:中)と判別されたときには、同車両の発進可能性が維持されているときの方が、同車両の発進可能性が増大または減少して変化したときよりも発進可能性が高い。さらに、ある時点での車両の発止可能性が低いと判別されたときには、同車両の発進可能性が維持されているときの方が、同車両の発進可能性が「中」から「低」へと減少して変化したときよりも発進可能性が高い。
【0144】
このように本実施の形態によれば、検知対象とされた車両の状態の変化傾向として同車両が行動を開始する可能性の推移を求めるとともに、この可能性の推移に基づいて同車両の行動を予測することにより、車両が行動を開始するまでの時間差を利用したより細やかな予測が実現されるようになる。
【0145】
以下、本実施の形態による移動体の行動予測手順及び運転支援手順を図15を参照して総括する。
図15に示すように、本手順では、まずステップS300において上記移動体検出部1
10により自車両の周辺における他車両の存在の有無が検出される。そして、先の第3の実施の形態と同様に、検知対象とされた車両を構成する各部品の識別、及び同識別された部品毎の温度情報の関連付け、及び車両のエンジンの稼働状態の識別等が行われる(ステップS301〜ステップS308)。
【0146】
そして本実施の形態では、ステップS309において、上記関連付けられた各部品(属性情報)毎の温度情報が漸次記憶される。次いで、先の第3の実施の形態と同様、検知対象とされた車両の乗員の有無が推定されると(ステップS310、S311)、上記関連付けられた各部品毎の温度情報、及び上記識別されたエンジンの稼働状態、及び上記推定された乗員の推定結果に基づいて、当該車両の発進可能性の推移が算出される(ステップS312)。
【0147】
こうして、検知対象とされた車両の発進可能性の推移が算出されると、この算出された発進可能性の推移に基づいて検知対象とされた車両が発進する可能性が予測される(ステップS313)。この結果、先の図14に示したように、検知対象とされた車両が発進する可能性が、それぞれ「発進可能性:無(+)」、「発進可能性:無(−)」、「発進可能性:中(+)」、「発進可能性:中(−)」、「発進可能性:高(+)」、「発進可能性:高(−)」として予測されるようになる。
【0148】
そして、本実施の形態においても、こうした予測結果に基づき、停車中の車両の発生可能性が「無(+)」、「無(−)」であると判断されたときには、静止障害物に対する対応制御が上記ブレーキ制御装置320、エンジン制御装置330、表示装置340、音声装置350等を介して実行される(ステップS314:YES、S315)。
【0149】
一方、上記予測結果に基づき、停車中の車両の発進可能性が「中(+)」、「中(−)」、「大(+)」、「大(−)」であると判断されたときには、可動障害物に対する対応制御が上記ブレーキ制御装置320、エンジン制御装置330、表示装置340、音声装置350等を介して実行される(ステップS314:NO、S316)。
【0150】
また一方、自車両の周辺に他車両が存在していない場合(ステップS301:NO)、及び自車両の周辺に存在している車両が走行状態にある場合(ステップS302:NO)には、この車両に対する行動予測を行うことなく、再度、上記移動体検出部110による自車両の周辺の車両の存在の有無の検知が行われるようになる。
【0151】
そして、こうした自車両の周辺に存在する停止車両の検出、及び同検出された車両の発進可能性の推移の算出、及び算出された発進可能性の推移に基づく行動予測が適宜行われることにより、自車両の周辺に存在する車両の行動を踏まえた運転支援が適宜実行されるようになる。これにより、自車両の周辺に存在する車両に対するリスクを好適に抑制しつつも、現在地から目的地に至るまでの旅行時間が短縮されるようになる。
【0152】
以上説明したように、本実施の形態にかかる行動予測装置及び行動予測方法及び運転支援装置によれば、上記(1)〜(9)の効果が得られるとともに、さらに以下の効果が得られるようになる。
【0153】
(10)検知対象とされた車両の各部品毎に関連付けられた温度情報を漸次記憶するとともに、同記憶された各部品毎の温度情報の推移、及び乗員の有無の推定結果、及びエンジン状態の識別結果から当該車両の状態の変化傾向を求めることとした。そして、この求められた変化傾向に基づいて検知対象とされた車両の行動を予測することとした。これにより、車両の状態変化を利用した幅広い行動予測が可能となる。
【0154】
(11)検知対象とされた車両の状態の変化傾向として停止状態にある車両の発進可能性の推移を求めることとした。そして、この求められた発進可能性の推移が一定であるときに停止状態にある車両が発進する可能性が高いとして同車両の行動を予測するとともに、
上記求められた発進可能性の推移が変化しているときに停止状態にある車両が発進する可能性が低いとして同車両の行動を予測することとした。これにより、車両が走行を開始するまでの時間差を利用したより詳細な行動予測が実現されるようになる。
【0155】
(第5の実施の形態)
以下、本発明にかかる行動予測装置及び行動予測方法及び運転支援装置を具体化した第5の実施の形態について図16及び図17を参照して説明する。図16に、本実施の形態の行動予測装置及び行動予測方法が適用される運転支援装置の概略構成を示す。なお、この第5の実施の形態は、検知対象とされた車両の乗降の可能性を加味して同車両の行動を予測するものであり、その基本的な構成は先の第4の実施の形態と共通になっている。
【0156】
図16は、先の図12に対応する図として、この第5の実施の形態にかかる行動予測装置及び行動予測方法が適用される運転支援装置の概略構成を示したものである。なお、この図12において、先の図1、図5、図9、図12に示した各要素と同一の要素についてはそれぞれ同一の符号を付して示しており、それら要素についての重複する説明は割愛する。
【0157】
図16に示すように、本実施の形態の車両行動予測部230は、検知対象とされた車両から同車両の乗員が乗降する可能性を推定する乗降可能性演算部231を備えている。
このように構成される運転支援装置では、例えば自車両の周辺に存在する車両が上記移動体検出部110によって検知されると、この検知された車両や同車両を構成する排気管やタイヤ等の各部品の材質や色、形状等の物理的性質が上記物性検出部120にて検出される。また、上記移動体検出部110にて検出された車両や同車両を構成する排気管やタイヤ等の各部材の温度情報が上記温度検出部130にて検出される。
【0158】
そして、本実施の形態では、検知対象とされた車両の発進可能性の推移が上記状態変化傾向算出部260にて算出されると、この算出結果が上記車両行動予測部230を構成する乗降可能性演算部231に入力される。また併せて、上記乗員有無推定部240にて同車両の乗員の有無が推定されると、この推定結果が乗降可能性演算部231に入力される。
【0159】
こうして乗降可能性演算部231では、検知対象とされた車両の発進可能性の推移と同車両に対する乗員の有無の推定結果とに基づいて、当該車両から乗員が乗降する可能性が求められる。そして、車両行動予測部230では、乗降可能性演算部231による演算結果に基づいて、検知対象である車両の行動として同車両からの乗員の乗降の有無や同車両の乗員の乗降に伴うドアの開閉動作の有無等が併せて予測され、その予測結果が上記運転支援態様決定部310に入力される。
【0160】
こうして運転支援態様決定部310では、例えば、検知対象とされた停止状態にある車両から乗員が乗降する可能性が高いと判別されたときには、その旨が上記表示装置340や音声装置350等を介してドライバに通知される。また同様に、検知対象とされた停止状態にある車両から乗員が乗降する可能性が高いと判別されたときには、同車両のドアの開閉動作を考慮した車間距離や走行経路の案内が上記表示装置340や音声装置350等を介して行われる。
【0161】
運転支援装置としてこのような構成によれば、検知対象とされた車両の状態変化と同車
両の乗員の有無の推定結果とに基づいて、当該車両からの乗員の乗降や同車両のドアの開閉動作等を踏まえた運転支援が実現されるようになる。
【0162】
以下、図17を参照して上記乗降可能性演算部231による乗員の乗降可能性の算出手順を説明する。
図17に示すように、本手順では、まずステップS400において、検知対象とされた停止状態の車両の乗員の有無が上記乗員有無推定部240による推定結果に基づき判断される。そして、検知対象とされた停止状態の車両に乗員が存在している判断されると、当該車両の発進可能性が減少しているか否かが上記状態変化傾向算出部260による算出結果に基づき判断される(ステップS401)。
【0163】
この結果、検知対象とされた車両に乗員が存在しており、かつ、同車両の発進可能性が減少傾向にあると判断されたときには、当該車両の状態が走行状態から停止状態に遷移した状態であると推定のもとに、同車両から乗員が乗降する可能性が高いと予測される(ステップS401:YES、S402)。
【0164】
一方、検知対象とされた車両に乗員が存在しており、かつ、同車両の発進可能性が減少傾向にはないと判断されたときには、当該車両のエンジンの稼働状態が高回転であるか否かが上記エンジン状態識別部214による識別結果に基づき判断される(ステップS401:NO、ステップS403)。そして、検知対象とされた車両のエンジンの稼働状態が高回転領域にあると判断されたときには、当該車両が発進待機状態にあり、同車両から乗員が乗降する可能性が低いと予測される(ステップS403:YES、S404)。また、検知対象とされた車両のエンジンの稼働状態が低回転領域であっても、当該車両の発進可能性が増大傾向にあるときには、当該車両が発進待機状態へと推移しているとの推定のもとに同車両から乗員が乗降する可能性が低いと予測される(ステップS405:YES、S404)。
【0165】
一方、検知対象とされた車両のエンジンの稼働状態が低回転領域であり、かつ、当該車両の発進可能性が増大傾向にも減少傾向にもなく一定であるときには、同車両から乗員が乗降する可能性がやや高い(乗降可能性:中)として予測される(ステップS405:NO、S406)。
【0166】
また一方、検知対象とされた車両に乗員が存在していないと判断されたときには、同車両から乗員が乗降する可能性が無いものとして予測される(ステップS400:NO、S407)。
【0167】
このように本実施の形態では、検知対象とされた車両の発進可能性の推移と同車両に対する乗員の有無の推定結果とに基づいて、当該車両から乗員が乗降する可能性が複数の段階に分けて予測される。これにより、検知対象とされた車両からの乗員の乗降や乗員の乗降に伴うドアの開閉動作等を詳細に予測することができるようになり、この予測結果に応じた運転支援が実現されるようになる。
【0168】
以上説明したように、本実施の形態にかかる行動予測装置及び行動予測方法及び運転支援装置によれば、上記(1)〜(11)の効果が得られるとともに、さらに以下の効果が得られるようになる。
【0169】
(12)検知対象とされた車両の発進可能性の推移と同車両の乗員の有無の推定結果とに基づいて、当該車両からの乗員の乗降の可能性を求めることとした。これにより、検知対象とされた車両のドアの開閉動作等をはじめとする詳細な行動予測が実現されるようになる。また、検知対象とされた車両からの乗員の乗降の可能性の有無に基づき、同車両か
ら乗降する乗員の存在をリスクとして考慮した行動予測が実現されるようにもなる。
【0170】
なお、上記各実施の形態は、以下のような形態をもって実施することもできる。
・上記各実施の形態では、上記運転支援部300による運転支援の一つとして、静止障害物に対する対応制御及び可動障害物に対する対応制御のいずれか一方を選択的に実行することとした。これに限らず、上記運転支援部300による運転支援として、検知対象とされた車両の予測結果に基づく自律運転支援を行うこととし、検知対象とされた車両の予測結果に応じた進路生成等を行うようにしてもよい。この他、上記運転支援部300による運転支援とは、検知対象とされた車両の予測結果を利用した運転支援であればよい。
【0171】
・上記各実施の形態では、上記移動体検出部110及び物性検出部120及び温度検出部130を、一のスペクトルセンサ100によって構成することとした。これに限らず、上記移動体検出部110を例えばカラーカメラやレーザーレーダー等によって構成し、カラーカメラにより撮像された画像情報やレーザーレーダーよる検出結果に基づいて自車両の周辺における他車両の存在の有無や同車両の位置、速度等を検出するようにしてもよい。また、上記物性検出部120を例えばカラーカメラ等によって構成し、このカラーカメラにより撮像された画像情報の処理を通じて検知対象とされた車両もしくは同車両を構成する各部品等の物理的性質を検出するようにしてもよい。さらに、上記温度検出部130を例えば赤外線カメラ等によって構成し、この赤外線カメラにより撮像された画像情報に基づいて検知対象とされた車両もしくは同車両を構成する各部品等の温度を検出するようにしてもよい。またこの他、上記スペクトルセンサ100と併せて、カラーカメラやレーザーレーダー、赤外線カメラ等の複数の装置を備える構成としてもよい。
【0172】
・上記第5の実施の形態では、検知対象とされた車両の乗員の乗降可能性を求め、この乗降可能性も加味して検知対象とされた車両の行動を予測することとした。これに限らず、同車両の乗員が不在のときには、同車両に搭乗する可能性が高い人物を監視し、この人物が停止車両に搭乗する可能性を求めるようにしてもよい。この場合には、例えば、上記移動体検出部110及び物性検出部120によって検知対象とする車両の周辺に存在する人物を検出するとともに、この検出された人物の歩行経路等に基づいて同人物が検知対象とされた車両に搭乗する可能性を求めることができる。これにより、この人物を自車両に対するリスクとした運転支援が可能になるとともに、同人物が車両に搭乗する際の車両のドアの開閉動作等の予測が可能となる。
【0173】
・上記第5の実施の形態では、検知対象とされた車両の乗員の乗降可能性を、当該車両の発進可能性と同車両のエンジンの稼働状態とに基づいて求めることとした。これに限らず、検知対象とされた車両の発進可能性のみから同車両からの乗員の乗降可能性を求めるようにしてもよい。またこの他、車両の状態の変化傾向に基づいて乗員の乗降可能性を求めるものであればよい。
【0174】
・上記第4及び第5の実施の形態では、車両の状態の変化傾向として、検知対象とされた車両の発進可能性の推移を用いることとした。これに限らず、車両の状態の変化傾向とは、上記属性情報及び温度情報に基づいて特定される車両の状態の変化傾向であればよく、例えば車室内の温度変化に基づいて乗員の存在の有無を推定するようにしてもよい。この場合には、検知対象とされた車両の停止状態が継続し、かつ、同車両の車室内の温度が乗員の存在に適した温度を超えて上昇しているときや同温度を超えた状態が維持されているときには、当該車両に乗員が存在しないと推定することができる。そして、この推定結果に基づき、検知対象とされた車両が発進する可能性や同車両から乗員が乗降する可能性が無いものとして予測することも可能である。また例えば、一定であった排気管の温度が上昇したときには、車両の状態が停止状態から発進待機状態へと遷移し、その後に発進する可能性が高いと判断することも可能である。この場合にも、車両の状態変化を利用した
幅広い行動予測が可能となる。
【0175】
・上記第4及び第5の実施の形態では、運転支援装置として、上記気体成分検出部140及びエンジン状態識別部214及び乗員有無推定部240を備える構成とした。これに限らず、検知対象とされた車両の属性情報の推移と該当する温度情報の推移とに基づき特定される車両の状態の変化傾向から当該車両の行動を予測する構成であればよく、上記気体成分検出部140及びエンジン状態識別部214及び乗員有無推定部240を割愛する構成としてもよい。この場合には、運転支援装置としての構成上の簡略化を図りつつも、車両の状態変化を利用した行動予測が可能となる。
【0176】
・上記第3の実施の形態では、検知対象とされた車両の乗員の有無を推定し、この推定結果と同車両の周辺の気体成分情報とを加味して同車両の現状態を特定することとした。これに限らず、上記属性情報及び温度情報に基づいて車両に搭乗する乗員の有無を推定するとともに、この推定結果を加味して車両の行動を予測する構成であればよく、上記気体成分検出部140及びエンジン状態識別部214を割愛する構成としてもよい。この場合には、運転支援装置としての構成上の簡略化を図りつつも、検知対象とされた車両の乗員の有無に基づいた行動予測が可能となる。
【0177】
・上記第2の実施の形態では、検知対象とされた車両の周辺に存在する気体成分に基づいて同車両の現状態を特定し、この特定された車両の現状態に基づいて車両の行動を予測することとした。これに限らず、上記気体成分検出部140にて検出された気体成分情報を加味して検知対象とされた車両の行動を予測する上では、気体成分情報に基づく車両の現状態の特定を行うことなく同車両の行動を予測することも可能である。この場合には、例えば、検知対象とされた停止状態の車両の周辺に存在する排気ガスのNox濃度が高いときには同車両が発進する可能性が高いとして予測し、同車両の周辺に存在する排気ガスのNox濃度が低いときには同車両が発進する可能性が低いとして予測することができる。
【0178】
・上記第2の実施の形態では、検知対象とする車両の周辺に存在する気体成分として同車両の排気管から排気される排気ガス成分を検出し、この排気ガス成分のNox濃度に基づいて車両のエンジンの稼働状態を識別することとした。これに限らず、検出対象とする気体成分とは、車両の現状態もしくは同車両の未来状態が反映される成分であればよい。
【0179】
・上記第1〜第3の各実施の形態では、検知対象とされた車両の現状態を上記属性情報及び温度情報に基づいて特定するとともに、この特定された車両の現状態に基づいて同車両の行動を予測することとした。これに限らず、上記属性情報及び温度情報に基づいて検知対象とされた車両の行動を予測するものであればよく、検知対象とされた車両の現状態を特定することなく同車両の行動を予測することも可能である。この場合には、先の図2、図7等に示したように、例えば、検知対象とされた車両のタイヤの温度が低く、かつ、タイヤの温度が低いときには、同車両が発進する可能性が無いと予測することが可能である。また、例えば、検知対象とされた車両のタイヤの温度が高く、かつ、タイヤの温度が高いときには、同車両が発進する可能性が高いと予測することが可能である。そしてこの場合には、上記車両状態特定部220を割愛することが可能となり、運転支援装置としての構成上の簡略化はもとより検知対象とされた車両の予測にかかる処理負荷が軽減されるようにもなる。
【0180】
・上記第1〜第5の各実施の形態では、上記物性検出部120及び属性識別部210と温度検出部130によって検知対象とされた車両の異なる複数の部分についてそれぞれ物理的性質を検出してその属性を識別するとともに、温度を検出することとした。そして、上記車両行動予測部230では、異なる複数の部分について各々関連付けられた属性情報
毎の温度情報の組み合わせに基づいて、検知対象とされた車両の行動を予測することとした。これに限らず、検知対象とされた車両もしくは同車両の一つの部分のみについて物理的性質を検出してその属性を識別するとともに、温度を検出することとしてもよい。そして、それら識別された識別情報と検出された温度情報とに基づいて検知対象とされた車両の行動を予測するようにしてもよい。
【0181】
・上記各実施の形態では、上記スペクトルセンサ100を、運転支援の対象とする車両に搭載することとした。これに限らず、例えば、上記スペクトルセンサ100をインフラとして道路上に複数配置し、このスペクトルセンサ100によって検出された車両毎の物理的性質に関する情報や温度情報等を、無線通信装置等を介して管理センターに集約するようにしてもよい。そして、管理センターでは、この集約された情報に基づき各車両の行動を予測し、その予測結果を運転支援の対象とする車両や各種端末に配信するようにしてもよい。この場合には、特に上記第4及び第5の実施の形態において、検知対象とする車両の長期的な状態変化を求めることが可能となる。これにより、検知対象とする車両の状態変化を利用した行動予測をより高精度に行うことができるようになる。
【0182】
・上記各実施の形態では、上記属性情報及び温度情報に基づいて、検知対象とされた停止状態にある車両の発進可能性やドアの開閉動作等を予測することとした。これに限らず、例えば、走行状態にある車両が停止する可能性を同車両の各部品の属性情報及び温度情報に基づいて予測するようにしてもよい。すなわち、検知対象とされた車両の行動と同車両や同車両を構成する各部品の属性情報及び温度情報との間に相関性が存在する場合には、この相関性を利用して車両の行動を予測することは可能である。
【0183】
・上記各実施の形態では、自車両の周辺に存在する車両を検知対象とするとともに、この車両の行動を予測することとした。この他、検知対象及び行動の予測対象としては、人物や動物等の移動体であってもよい。この場合にも、この移動体の属性情報及び温度情報に基づいて同移動体の行動を経験的に予測することは可能である。
【0184】
・上記各実施の形態では、上記行動予測装置及び行動予測方法を車両に搭載される運転支援装置に適用することとした。これに限らず、上記移動体検出部110及び物性検出部120及び温度検出部130を備えた単体の行動予測装置を構成し、この装置の周辺に存在する移動体の行動を予測することとしてもよい。
【0185】
・上記各実施の形態では、検知対象とされた移動体及び同移動体の一部の物理的性質と、同じく検知対象とされた移動体及び同移動体の一部の温度とを検出することとした。これに限らず、検知対象とされた移動体を単位として、その物理的性質と温度とを検出するとともに、この検出された温度情報と物理的性質に基づき識別された属性情報とに基づいて検知対象とされた移動体の行動を予測するようにしてもよい。また、検知対象とされた移動体の一部のみの物理的性質と温度とを検出するとともに、この検出された温度情報と物理的性質に基づき識別された属性情報とに基づいて検知対象とされた移動体の行動を予測するようにしてもよい。
【符号の説明】
【0186】
100…スペクトルセンサ、110…移動体検出部、120…物性検出部、130…温度検出部、140…気体成分検出部、200…行動予測装置、210…属性識別部、211…部品識別部、212…スペクトルデータベース、213…部品情報整理部、214…エンジン状態識別部、220…車両状態特定部、230…車両行動予測部、231…乗降可能性演算部、240…乗員有無推定部、250…部品情報記憶部、260…状態変化傾向算出部、300…運転支援部、310…運転支援態様決定部、320…ブレーキ制御装置、330…エンジン制御装置、340…表示装置、350…音声装置。
【技術分野】
【0001】
本発明は、移動体の行動を予測する行動予測装置、及び行動予測方法、及びこうして予測された移動体の行動に基づいて運転支援を行う運転支援装置に関する。
【背景技術】
【0002】
近年のカーナビゲーションシステム等を用いた運転支援システムでは、移動時間の短縮や渋滞の抑制、障害物等との衝突の回避などを実現すべく、ドライバに対する各種運転支援が行われている。こうした運転支援システムでは通常、自車両の周辺に存在する車両や人物などといった移動体の存在を検出するとともに、この検出結果に基づき、半強制的な制動力の付与による減速支援や警告、推奨経路の案内、自律運転等の各種運転支援が行われる。そして従来、こうした運転支援等を実現するための移動体の存在の有無を検出する装置としては、例えば特許文献1に記載の車両検知装置が知られている。この特許文献1に記載の車両検知装置を図18及び図19に示す。
【0003】
図18に示すように、この車両検知装置は、大きくは、車両や道路等の存在の有無を検知するセンサ部2を有する車両検知器1と、この車両検知器1による検知結果に基づき車両の存在の有無を判定する車両有無判定部10とを有している。このうち、車両検知器1を構成するセンサ部2は、車両や道路等の検知対象が発する赤外線を検知する複数のサーモパイル素子3を備えて構成されている。また、車両検知装置は、信号機の現示態様を制御する信号機制御装置や管理センターなどに車両有無判定部10による判定結果を送信するための無線通信部11を備えている。
【0004】
このように構成される車両検知装置では、サーモパイル素子3によって検知対象から発生された赤外線が検知されると、このサーモパイル素子3には検知対象に応じた起電力が発生する。そして、この発生した起電力がアンプ13によって増幅され、この増幅された起電力が検知対象の検知結果として車両有無判定部10に入力される。車両有無判定部10では、検知対象に応じた起電力が入力されると、この起電力がA/D変換器14にてデジタル信号に変換される。そして、車両有無判定部10では、感知処理として、このデジタル信号に基づくサーモパイル素子3の検知結果が所定の閾値を超えたか否かの判定に基づき車両等の移動体の存在の有無が判定される。そしてこうした判断結果が集計されると、この集計結果が上記無線通信部11に入力され、同入力された集計結果が無線制御部11bにて制御される送受信部11aを介して信号機制御装置や交通管理センターなどに送信される。
【0005】
このように構成される車両検知装置では、図19に示すように、道路傍の支柱30等に上記車両検知器1が設置される。この車両検知器1は、複数のサーモパイル素子3による移動体の監視範囲として車幅方向に隣り合う2つの監視範囲3A及び3Bを有している。そして、それら監視範囲3A及び3Bに車両20が侵入すると、この車両20のエンジンやルーフ等の部位と道路面との温度差に基づいて車両20の存在が検知される。
【0006】
このように、特許文献1に記載の装置によれば、上記複数のサーモパイル素子3による監視範囲3A及び3Bへの車両20の侵入に基づきその検知が行われることから、車両のある部位と道路面との温度差が小さい場合であっても、別の部位と道路面との温度差に基づいてその検知精度を高めることができるようになる。また、上記センサ部2としてサーモパイル素子3を採用したことで、車両の側方からでもその検知を高精度に行うことができるようにもなる。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開2004−302699号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
ところで、実際の交通環境に即した運転支援を行う上では、車両や人物等の移動体の存在の有無のみならず、自車両の周辺に存在する移動体が今後どのように行動するかによっても、この移動体の存在を考慮した運転支援態様は異なるものとなる。すなわち、例えば自車両の進行方向前方に停車している車両が発進する可能性が高い場合や同車両からの乗員の乗降の可能性が高い場合には、車両や乗員等の存在を自車両に対するリスクとして考慮した経路選択や減速案内、警告等が必要となる。一方、自車両の進行方向前方に停車している停止車両の発進の可能性が低い場合には、この停止車両の存在を自車両に対するリスクとして考慮する必要性は低く、この停止車両との必要最低限の車間距離を確保した上での経路等の選択が行われることが望ましい。
【0009】
しかし実情としては、たとえ上記サーモパイル素子3等をはじめとする各種センサによって監視範囲に存在する移動体を検知することができたとしても、この検知した移動体が今後どのように行動するかを予測することは難しく、移動体の行動予測技術の開発はもとより、同移動体の行動予測に基づく運転支援の実用化が切望されている。
【0010】
本発明は、このような実情に鑑みてなされたものであり、その目的は、簡易な構成でありながら、検知した移動体の行動を高い信頼性のもとに予測することのできる行動予測装置及び行動予測方法、及びこの予測された移動体の行動に基づいて運転支援を行うことのできる運転支援装置を提供することにある。
【課題を解決するための手段】
【0011】
以下、上記課題を解決するための手段及びその作用効果について記載する。
請求項1に記載の発明は、移動体の行動を予測する行動予測装置であって、前記移動体の存在の有無を検出する移動体検出部と、該移動体検出部にて検出された移動体または同移動体の一部の物理的性質を検出する物性検出部と、該検出された物理的性質に基づきその特徴である属性を識別する属性識別部と、前記移動体検出部にて検出された移動体または同移動体の一部の温度を検出する温度検出部と、前記属性識別部により識別された属性情報と前記温度検出部により検出された温度情報とに基づき前記移動体の行動を予測する行動予測部とを備えることを要旨とする。
【0012】
車両などをはじめとする移動体は、排気管やタイヤ等の各部材の温度が、同移動体の走行直後や走行開始準備といった状態に応じて変化する。例えば停止中の車両の排気管の温度が高い場合には、車両が発進待機状態にあり、その後に発進する可能性が高く、車両の排気管の温度が低い場合には、停車状態を継続する傾向にあり、その後に発進する可能性が低い。このため、上記構成によれば、検知対象とする移動体もしくは同移動体の一部の属性情報と温度情報とに基づいて移動体の行動を予測することができるようになる。これにより、簡易な構成でありながら、検知した移動体の行動を高い信頼性のもとに予測することができるようになる。
【0013】
請求項2に記載の発明は、請求項1に記載の行動予測装置において、前記物性検出部及び前記属性識別部と前記温度検出部とは前記移動体の異なる複数の部分についてそれぞれ前記物理的性質を検出してその属性を識別するとともに、前記温度を検出するものであり、前記行動予測部は、前記異なる複数の部分について各々関連付けられた属性情報毎の各々の温度情報の組み合わせに基づいて前記移動体の行動を予測することを要旨とする。
【0014】
車両等の移動体を構成する排気管やタイヤ等の各部材の温度は、それぞれ一様に変化するものではなく、同一の移動体であっても部材毎に異なる温度となる。例えば、車両のタイヤの温度が低く、かつ、排気管の温度が低い場合には、車両が停車状態を継続する傾向にあり、その後に発進する可能性が低い。一方、車両のタイヤの温度が低い場合であっても、排気管の温度が高い場合には、車両が発進待機状態にあり、その後に発進する可能性が高い。このように、移動体を構成する各部材の温度とは、それらの機能が反映された固有の温度となる。そこで、上記構成によるように、上記物性検出部及び属性識別部と上記温度検出部とで移動体の異なる複数の部分についてそれぞれ物理的性質を検出してその属性を識別するとともに、温度を検出し、それら異なる複数の部分について各々関連付けられた属性情報毎の各々の温度情報の組み合わせに基づいて移動体の行動を予測することとすれば、属性情報毎に固有の温度情報の組み合わせを通じて予測可能な移動体の行動のバリエーションが拡大されるようになるとともに、より信頼性の高い移動体の行動予測が実現されるようになる。
【0015】
請求項3に記載の発明は、請求項1または2に記載の行動予測装置において、前記行動予測部は、前記属性識別部により識別された属性情報と前記温度検出部により検出された温度情報とに基づき前記移動体の現状態を特定するとともに、この特定した移動体の現状態から同移動体の行動を予測することを要旨とする。
【0016】
通常、停止継続状態、発進待機状態、停止直後などといった移動体の各種状態と、この移動体の以後の行動とは相関する。すなわち、移動体が継続して停止しているときや停止直後は、その後に行動を開始する可能性が低く、アイドリング状態等の発進待機状態にあるときには、その後に開始する可能性が高い。そして、こうした移動体の現状態とは、移動体や同移動体を構成する各部材の温度に基づき特定することが可能である。そこで、上記構成によるように、上記属性識別部により識別された属性情報と上記温度検出部により検出された温度情報とに基づき移動体の現状態を特定するとともに、この特定した移動体の現状態から同移動体の行動を予測することとすれば、移動体の現状態と未来の状態との相関性を利用したより的確な移動体の行動予測が実現されるようになる。
【0017】
請求項4に記載の発明は、請求項1〜3のいずれか一項に記載の行動予測装置において、前記移動体の周辺に存在する気体成分を検出する気体成分検出部をさらに備え、前記行動予測部は、前記気体成分検出部にて検出された気体成分情報を加味して前記移動体の行動を予測することを要旨とする。
【0018】
エンジン等を駆動源とした移動体は、その走行時に排気ガス等の気体を排出することが普通であり、こうした排気ガス中のNox(窒素酸化物)の濃度は、エンジン等の回転数に比例する。例えば、移動体の周辺から排気ガス成分が検出されないときには、移動体に搭載されたエンジンが停止していると識別することができ、この識別結果に基づいて移動体が発進する可能性が極めて低いと予測することができる。一方、移動体の周辺から排気ガスが検出されたときには、その排気ガスの濃度が高いほど移動体に搭載されたエンジンが高回転で稼働していると識別することができ、この識別されたエンジンの回転数が高いほど移動体が発進する可能性が高いと予測することができる。そこで、上記構成によるように、上記移動体の周辺に存在する気体成分を検出する気体成分検出部をさらに備える構成とし、この気体成分検出部にて検出された気体成分情報を加味して移動体の行動を予測することとすれば、上記属性情報及び温度情報に基づき予測された移動体の行動を、より詳細に分類することができるようになる。
【0019】
請求項5に記載の発明は、請求項4に記載の行動予測装置において、前記行動予測部は、前記気体成分検出部にて検出された気体成分情報を加味して該当する移動体の現状態を
特定するとともに、この特定した移動体の現状態から同移動体の行動を予測することを要旨とする。
【0020】
通常、移動体や同移動体を構成する各部材の温度とは、移動体の現状態に相関するものの、検出及び識別の対象とする部材如何によってはその温度情報に基づき移動体の行動を予測することが困難な場合もある。例えば、上記検出された排気管の温度が高いときには、その温度情報のみによっては移動体が停止直後(発進可能性:低)なのか、あるいは、エンジンが始動された直後(発進可能性:高)なのかを判別することは難しい。そこで、こうした排気管等の温度情報に併せて同排気管から排出される排気ガス成分を加味することとすれば、検知対象とする移動体の現状態が停止直後なのか、あるいは、エンジンが始動された直後なのかを判別することができるようになる。このため、上記構成によるように、上記識別され検出された属性情報及び温度情報に、さらに上記気体成分情報を加味して該当する移動体の現状態を特定することとすれば、移動体の現状態をより詳細に特定することができるようになり、この特定された移動体の現状態に基づくきめ細かい行動予測が実現されるようになる。
【0021】
請求項6に記載の発明は、請求項1〜5のいずれか一項に記載の行動予測装置において、前記属性識別部により識別された属性情報と前記温度検出部により検出された温度情報とに基づき前記移動体に搭乗する乗員の有無を推定する乗員有無推定部をさらに備え、前記行動予測部は、前記乗員有無推定部にて推定された前記移動体に対する乗員の有無を加味して前記移動体の行動を予測することを要旨とする。
【0022】
車両等の移動体はそのユーザ等によって操作されることが普通であり、移動体に乗員が存在しないときには、同移動体が行動を開始する可能性が無いものとして予測することができる。そして、こうした乗員の有無は、例えば車両等に設けられた窓の領域の温度分布に基づき推定することが可能であり、この温度が乗員の存在に適さない温度であるときには、移動体に乗員が存在する可能性が低いと推定することが可能である。そこで、上記構成によるように、上記乗員有無推定部にて推定された移動体に対する乗員の有無を加味して移動体の行動を予測することとすれば、乗員の有無の判別を通じて移動体の行動をより高精度に予測することができるようになる。
【0023】
請求項7に記載の発明は、請求項1〜6のいずれか一項に記載の行動予測装置において、前記属性識別部により識別された属性情報と前記温度検出部により検出された温度情報とを関連付けて漸次記憶する記憶手段をさらに備え、前記行動予測部は、前記記憶手段に記憶された属性情報の推移と該当する温度情報の推移とに基づき特定される移動体の状態の変化傾向に基づいて前記移動体の行動を予測することを要旨とする。
【0024】
例えば、移動体が停止している状態が継続し、かつ、移動体の内部空間の温度が乗員の存在に適した温度を超えて上昇しているときには、移動体に乗員が存在せず、この移動体が発進する可能性が極めて低いと判断することが可能である。また例えば、一定であった排気管の温度が上昇したときには、移動体の状態が停止状態から発進待機状態へと遷移し、その後に発進する可能性が高いと判断することが可能である。そこで、上記構成によるように、属性識別部により識別された属性情報と温度検出部により検出された温度情報とを関連付けて漸次記憶するとともに、この記憶された属性情報の推移と該当する温度情報の推移とに基づき特定される移動体の状態の変化傾向に基づいて前記移動体の行動を予測することとすれば、移動体の状態変化を利用した幅広い行動予測が可能となる。
【0025】
請求項8に記載の発明は、請求項7に記載の行動予測装置において、前記行動予測部は、前記移動体の状態の変化傾向として停止状態にある移動体が行動を開始する可能性の推移を求め、この求めた行動を開始する可能性の推移が一定であるときに前記停止状態にあ
る移動体が行動を開始する可能性が高いとして前記移動体の行動を予測するとともに、前記求めた行動を開始する可能性の推移が変化しているときには前記停止状態にある移動体が行動を開始する可能性が低いとして前記移動体の行動を予測することを要旨とする。
【0026】
例えば、車両等の移動体にあっては、移動に際しての駆動源となるエンジン等の駆動システムが起動され、この起動されたエンジン等が安定した状態(アイドリング状態)に遷移してからドライバ等による移動体の操作が開始され、移動体が行動を開始する傾向にある。このため、アイドリング状態が継続している状態、換言すれば、移動体が行動を開始する可能性が高い状態が継続している場合には移動体が行動を開始する直前であると予測することができる。一方、エンジン等が起動されてからアイドリング状態に遷移した直後、換言すれば、移動体が行動を開始する可能性が低い状態から行動を開始する可能性が高い状態に推移(変化)したときには、アイドリング状態が継続していたときと比べてその直後に移動体が行動を開始する可能性は低い。すなわち、移動体が行動を開始する可能性の推移が変化するときと維持されているときとでは、停止状態にある移動体が行動を開始するまでの待機時間は異なるのが普通である。そこで、上記構成によるように、移動体の状態の変化傾向として停止状態にある移動体が行動を開始する可能性の推移を求め、この推移に基づき移動体の行動を予測することとすれば、移動体が行動を開始する可能性の推移の監視に基づき、同移動体が行動を開始するまでの時間差を利用したよりきめ細かな予測をすることができるようになる。
【0027】
請求項9に記載の発明は、請求項7または8に記載の行動予測装置において、前記行動予測部は、前記移動体の状態の変化傾向に基づいて前記移動体との間で乗員が乗降する可能性をさらに求め、該求めた乗降の可能性を加味して前記移動体の行動を予測することを要旨とする。
【0028】
上記の通り、乗員が搭乗する移動体の内部空間の温度が乗員の存在に適さない温度のもとに推移しているときには、この移動体に乗員が存在する可能性が極めて低い。このため、この移動体との間で乗員が乗降する可能性も極めて低いと予測することができ、この移動体においてドアの開閉等の動作が生じる可能性も低いと予測することが可能である。またこのときには、監視対象とする移動体の乗員に対するリスク回避の必要性が低いものとして判断することもできる。一方、移動体の停止状態とアイドリング状態とが継続したのちに移動体に搭載されたエンジン等が停止したときには、乗員による操作が行われた可能性が高く、移動体に乗員が存在していると推定することが可能である。そしてこの場合には、この移動体との間で乗員が乗降する可能性が高いと予測することができ、この移動体においてドアの開閉等の動作が生じる可能性が高いものと予測することが可能である。またこのときには、監視対象とする移動体の乗員に対するリスク回避の必要性が高いものとして判断することもできる。
【0029】
このため、上記構成によるように、移動体の状態の変化傾向に基づいて移動体との間で乗員が乗降する可能性をさらに求め、この求めた乗降の可能性を加味して移動体の行動を予測することとすれば、移動体のドアの開閉動作等をはじめとする詳細な行動予測が実現されるようになる。また、移動体からの乗員の乗降の可能性の有無に基づき、同移動体の行動や同移動体から乗降する乗員の存在をリスクとして考慮した行動予測が実現されるようにもなる。
【0030】
請求項10に記載の発明は、請求項1〜9のいずれか一項に記載の行動予測装置において、前記移動体検出部及び前記物性検出部及び前記温度検出部は、一のスペクトルセンサによって構成されることを要旨とする。
【0031】
上記構成によるように、前記移動体検出部及び前記物性検出部及び前記温度検出部を一
つのスペクトルセンサによって構成することとすれば、上記移動体の存在の有無はもとより、この移動体または同移動体の一部の物理的性質及び温度を一つのセンサのみによって取得することができるようになる。これにより、行動予測装置としてより簡易な構成が実現されるようになる。また、上記構成によれば、スペクトルセンサによる同一の測定データに基づく各種情報の解析、管理が可能となり、各種情報に基づく上記行動予測にかかる処理負荷が軽減されるようにもなる。
【0032】
請求項11に記載の発明は、移動体の行動を予測する行動予測方法であって、前記移動体または同移動体の一部の物理的性質を検出し、該検出された物理的性質に基づきその特徴である属性を識別するとともに、同属性の識別の対象とされた移動体または同移動体の一部の温度を検出して前記移動体または同移動体の一部の属性情報及び温度情報を抽出するステップと、前記抽出した属性情報及び温度情報に基づいて前記移動体の行動を予測するステップとを含むことを要旨とする。
【0033】
上記方法によれば、移動体または同移動体の一部の物理的性質の特徴である属性に関する情報とその温度に関する情報とに基づいて移動体の行動が予測される。これら属性及び温度に関する情報は、移動体の行動との相関性が高いことから、検知対象とされた移動体の行動を高い信頼性のもとに予測することができるようになる。
【0034】
請求項12に記載の発明は、請求項11に記載の行動予測方法において、前記移動体または同移動体の一部の属性情報及び温度情報を抽出するステップにおいて、前記移動体の異なる複数の部分についてそれぞれ前記物理的性質及び温度を検出することで前記属性情報及び温度情報を抽出し、前記移動体の行動を予測するステップにおいて、前記異なる複数の部分について各々関連付けられた属性情報毎の各々の温度情報の組み合わせに基づいて移動体の行動を予測することを要旨とする。
【0035】
上記方法によれば、各部材の機能が反映される属性情報毎に固有の温度情報の組み合わせを通じた行動予測が実現される。これにより、上記識別情報及び温度情報に基づいて移動体の行動を予測する上で、予測可能な移動体の行動のバリエーションが拡大されるようになるとともに、移動体の行動の予測にかかる信頼性も好適に高められるようになる。
【0036】
請求項13に記載の発明は、請求項11または12に記載の行動予測方法において、前記移動体の行動を予測するステップにおいて、前記抽出された属性情報及び温度情報に基づき前記移動体の現状態を特定するとともに、この特定した移動体の現状態から同移動体の行動を予測することを要旨とする。
【0037】
移動体の現状態と、その後に遷移する移動体の状態(未来状態)とは相関性が強く、移動体の現状態さえ特定できれば、移動体の行動を経験的に予測することが可能である。このため、上記方法によるように、上記属性情報及び温度情報に基づき移動体の現状態を特定するとともに、この特定した移動体の現状態から同移動体の行動を予測することとすれば、移動体の現状態と未来状態との相関性を利用したより的確な行動予測を行うことができるようになる。
【0038】
請求項14に記載の発明は、自車両の周辺に存在する移動体の行動の予測に基づいてドライバに対する運転支援を行う運転支援装置であって、請求項1〜10のいずれか一項に記載の行動予測装置によって予測された移動体の行動に関する情報に基づき前記運転支援を行うことを要旨とする。
【0039】
上記構成によれば、上記属性情報及び温度情報に基づく自車両の周辺に存在する車両や人物等の移動体の検知はもとより、この検知された移動体が今後どのように行動するかを
高い信頼性のもとに予測することができるようになる。これにより、自車両の周辺に存在する移動体の行動の予測を通じて、その予測結果を踏まえた適切な運転支援を行うことができるようになり、運転支援にかかる信頼性が高められるようになる。
【0040】
請求項15に記載の発明は、請求項14に記載の運転支援装置において、前記運転支援の一つとして、前記予測された移動体の行動に関する情報に基づき、停止状態にある移動体が停止状態を継続するときの静止障害物に対する対応制御、及び停止状態にある移動体が停止状態から移動状態に推移するときの可動障害物に対する対応制御、のいずれか一方を選択的に実行することを要旨とする。
【0041】
上記構成によれば、上記静止障害物に対する対応制御として、停止状態にある移動体が停止状態を継続するとき、すなわち、同移動体が発進する可能性が低いときには、例えばこの移動体との必要最低限の車間距離を確保した上での経路の選択等の運転支援が行われる。また、上記可動障害物に対する対応制御として、停止状態にある移動体が停止状態から移動状態に推移するとき、すなわち、同移動体が発進する可能性が高いときや同移動体からの乗員の乗降の可能性が高いときには、例えば車両や乗員等の存在を自車両に対するリスクとして考慮した経路選択や減速案内、警告等の運転支援が行われる。このように上記構成によれば、自車両の周辺に存在する移動体の移動の有無に応じて各対応制御が実行されることにより、移動体の行動に応じた適切な運転支援が選択的に行われるようになる。これにより、自車両の周辺に存在する車両に対するリスクを好適に抑制しつつも、現在地から目的地に至るまでの旅行時間が短縮されるようになる。
【図面の簡単な説明】
【0042】
【図1】本発明の行動予測装置及び行動予測方法及び運転支援装置の第1の実施の形態について、同行動予測装置及び行動予測方法が適用される運転支援装置の概略構成を示すブロック図。
【図2】車両を構成する部品毎の温度情報と車両の現状態及び未来状態との関係の一例を示す図。
【図3】検知対象としての車両の状態推移の一例を示す図。
【図4】同実施の形態の行動予測手順及び運転支援手順を示すフローチャート。
【図5】本発明の行動予測装置及び行動予測方法及び運転支援装置の第2の実施の形態について、同行動予測装置及び行動予測方法が適用される運転支援装置の概略構成を示すブロック図。
【図6】車両を構成する排気管の温度情報及び同排気管から排出される排気ガス成分と、車両の現状態との一例を示す図。
【図7】車両を構成する部品毎の温度情報及び排気ガス濃度と、車両の現状態及び未来状態との関係の一例を示す図。
【図8】同実施の形態の行動予測手順及び運転支援手順を示すフローチャート。
【図9】本発明の行動予測装置及び行動予測方法及び運転支援装置の第3の実施の形態について、同行動予測装置及び行動予測方法が適用される運転支援装置の概略構成を示すブロック図。
【図10】車両を構成する部品毎の温度情報及び排気ガス濃度と、車両の現状態及び未来状態との関係の一例を示す図。
【図11】同実施の形態の行動予測手順及び運転支援手順を示すフローチャート。
【図12】本発明の行動予測装置及び行動予測方法及び運転支援装置の第4の実施の形態について、同行動予測装置及び行動予測方法が適用される運転支援装置の概略構成を示すブロック図。
【図13】(a)は、車両の状態遷移の一例を示すタイムチャート。(b)は、車両を構成する各システムの状態遷移の一例を示すタイムチャート。(c)は、車両の発進可能性の推移例を示すタイムチャート。
【図14】車両の発進可能性の推移と車両の未来状態との関係を示す図。
【図15】同実施の形態の行動予測手順及び運転支援手順を示すフローチャート。
【図16】本発明の行動予測装置及び行動予測方法及び運転支援装置の第5の実施の形態について、同行動予測装置及び行動予測方法が適用される運転支援装置の概略構成を示すブロック図。
【図17】同実施の形態の車両に対する乗員の乗降可能性の算出手順を示すフローチャート。
【図18】従来の車両検知装置の概略構成を示すブロック図。
【図19】同車両検知装置による監視範囲を模式的に示す図。
【発明を実施するための形態】
【0043】
(第1の実施の形態)
以下、本発明にかかる行動予測装置及び行動予測方法及び運転支援装置を具体化した第1の実施の形態について図1〜図4を参照して説明する。図1に、本実施の形態の行動予測装置及び行動予測方法が適用される運転支援装置の概略構成を示す。
【0044】
図1に示すように、この運転支援装置は、例えば自動車等の車両に搭載されており、車両や人物等の移動体のスペクトルデータを観測する一のスペクトルセンサ100を備えている。また、この運転支援装置は、スペクトルセンサ100にて取得されたスペクトルデータに基づいて移動体の行動を予測する行動予測装置200と、この行動予測装置200にて予測された移動体の行動に基づいてドライバに対する運転支援を行う運転支援部300とを備えている。
【0045】
このうち、スペクトルセンサ100は、自車両の周辺に存在する自動車等の各種車両や歩行者等の移動体の有無及び同移動体の位置や速度等を検出する移動体検出部110を備えている。また、スペクトルセンサ100は、移動体検出部110にて検出された移動体または同移動体の一部の物理的性質を検出する物性検出部120を備えている。さらに、スペクトルセンサ100は、移動体検出部110にて検出された移動体または同移動体の一部の温度を検出する温度検出部130を備えている。なお、本実施の形態では、物性検出部120及び温度検出部130により、移動体の異なる複数の部分についてそれぞれ属性及び温度が検出される。
【0046】
このように構成されるスペクトルセンサ100では、例えば自車両の周辺に存在する車両が上記移動体検出部110によって検知されると、この検知された車両を構成する排気管やタイヤ等の複数の部品の材質や色、形状等の物理的性質が上記物性検出部120にて検出される。また、上記移動体検出部110にて検出された車両を構成する排気管やタイヤ等の複数の部品の温度が上記温度検出部130にて検出される。
【0047】
そして、このように構成されるスペクトルセンサ100により測定対象とする車両の各種情報(スペクトルデータ)が取得されると、この取得された各種情報がそれぞれ上記行動予測装置200に入力される。なお、本実施の形態では、こうした移動体検出部110及び物性検出部120及び温度検出部130が一つのスペクトルセンサによって構成されるため、各種情報は検知対象とされた車両のスペクトルデータから抽出されることとなる。
【0048】
行動予測装置200は、上記物性検出部120により検出された検出対象の物理的性質に関する情報に基づき、その特徴である属性を識別する属性識別部210を備えている。また、行動予測装置200は、この属性識別部210により識別された属性情報と上記温度検出部130にて検出された温度情報とに基づいて検知対象とされた車両の現状態を特定する車両状態特定部220を備えている。さらに、行動予測装置200は、車両状態特
定部220にて特定された車両の現状態に基づいて同車両の行動を予測する車両行動予測部230を備えている。
【0049】
このうち属性識別部210は、上記物性検出部120による検出結果に基づいて検知対象とされた車両を構成する各部品の種類を識別する部品識別部211を備えている。また、属性識別部210は、スペクトルセンサ100によって観測されるスペクトルデータに対応して複数の種類のスペクトルデータが予め登録されているスペクトルデータベース212を備えている。このスペクトルデータベース212には、車両の運転を支援する上で属性の識別が必要とされる測定対象として、例えば、車両を構成する排気管、タイヤ、窓等の各部品や、ガードレール、アスファルト、人の顔肌等の物体のスペクトルデータが予め登録されている。すなわち、ある物体のスペクトルデータとは、その表面形状等といった物性に応じて特有のスペクトル反射率を有している。そして、こうした各測定対象毎のスペクトルデータを示す情報が、例えば波長毎に8ビットで反射率係数を表すテーブルの態様として、各物体毎に記憶されている。さらに、属性識別部210は、部品識別部211にて識別された各部品毎の属性情報と上記温度検出部130にて検出された温度情報とを関連付けるとともに、それら関連付けられた属性情報及び温度情報を整理する部品情報整理部213を備えている。
【0050】
このように構成される属性識別部210では、上記物性検出部120による検出結果が入力されると、この検出結果(スペクトルデータ)とスペクトルデータベース212に登録されている各物体毎のスペクトルデータとの対比が例えば正規化相互相関法等によって行われる。そして、部品識別部211では、各スペクトルデータの対比を通じて、物性検出部120による検出対象が人や車両等のいずれの物体であるか、さらには、車両等を構成する各部品がタイヤ、排気管や窓等のいずれであるかといった属性の識別が行われる。こうして、検知対象とされた車両の属性と同車両を構成する各部品の属性とが識別されると、各々識別された属性情報が上記部品情報整理部213に入力される。
【0051】
そして、部品情報整理部213では、部品識別部211にて各々識別された部品毎の属性情報と、該当する部品毎の温度情報とがそれぞれ関連付けられる。これにより、例えば、自車両の周辺に存在する他車両の各部品が排気管やタイヤであるとして各々識別されるとともに、それら識別された排気管やタイヤの温度情報が各部品毎に適宜関連付けられることとなる。なお、こうした属性情報と温度情報との関連付けは、例えば上記移動体検出部110によって検出された車両等の各種移動体を単位として、同移動体を構成する各部品毎に行われる。
【0052】
こうして各々識別された部品毎の属性情報と温度情報とが関連付けられると、それら関連付けられた属性情報及び温度情報と当該関連付けの対象とされた移動体の位置や速度等に関する移動情報とが上記車両状態特定部220に入力される。
【0053】
この車両状態特定部220では、まず上記移動体検出部110による検出結果に基づき、検知対象とされた車両が停止しているか否か、すなわち車両の現状態が走行状態(移動状態)もしくは停止状態のいずれであるかが特定される。そして、この検知対象とされた車両が停止状態にあると特定されたときには、上記関連付けられた各部品毎の属性情報及び温度情報の組み合わせを通じて、停止状態にある車両が停車を継続しているか、あるいは発進待機状態にあるかといった車両の現状態の特定が行われる。なお、こうした各部品毎の属性情報及び温度情報の組み合わせを通じた車両の現状態の特定は、例えば経験的に求められたマップデータ等の参照を通じて行われる。
【0054】
こうして、検知対象とされた自車両周辺に存在する車両の現状態が特定されると、この特定された車両の現状態に関する情報が上記車両行動予測部230に入力される。この車
両行動予測部230では、上記特定された車両の現状態に基づき、検知対象とされた停止状態にある車両が今後どのように行動するかが予測される。これにより、例えば、自車両の進行方向前方に停車中の車両がその後に発進する可能性が高い、もしくは、停止状態を継続する可能性が高いといった各種行動の予測が行われる。なお、こうした車両の現状態に基づく行動予測も、例えば経験的に求められたマップデータ等の参照を通じて行われる。こうして、検知対象とされた車両の行動が車両行動予測部230にて予測されると、この予測結果が上記運転支援部300に入力される。
【0055】
この運転支援部300は、上記車両行動予測部230による予測結果に基づきドライバに対する運転支援態様を決定する運転支援態様決定部310を備えている。運転支援態様決定部310には、車両のブレーキの制御等を行うブレーキ制御装置320と、車両のエンジンの制御等を行うエンジン制御装置330とが、CAN(Control Area
Network)などの車載ネットワークを介してそれぞれ通信可能に接続されている。また、運転支援態様決定部310には、例えば液晶ディスプレイによって構成され、車室内のセンターコンソール付近に設置される表示装置340が電気的に接続されていている。さらに、運転支援態様決定部310には、運転支援にかかる警報などの各種情報を出力するための出力装置として音声装置350が電気的に接続されていている。
【0056】
そして、運転支援態様決定部310では、例えば、ドライバによる目標地点の設定が行われると、旅行時間や燃料消費量が最小となる経路がダイクストラ法等に基づき探索される。また、運転支援態様決定部310では、上記予測された車両の行動に関する情報に基づき、
a,停止状態にある車両が停止状態を継続するときの静止障害物に対する対応制御、
b,停止状態にある車両が停止状態から走行状態に推移するときの可動障害物に対する対応制御、
のいずれか一方が選択的に実行される。これにより、上記属性情報及び温度情報に基づき予測された車両の行動に応じた的確な運転支援が選択的に実行されるようになる。
【0057】
一方、ブレーキ制御装置320は、各種センサからの信号に基づいて車両のブレーキ装置の制御を通じて当該車両に制動力を発生させる。エンジン制御装置330は、車両のエンジンの運転制御を行う装置であって、アクセル踏込量を検出するアクセルセンサや吸入空気量を検出するセンサ等が接続されるとともに、スロットルバルブの駆動回路、燃料噴射弁の駆動回路等の各種機器の駆動回路が接続されている。そして、エンジン制御装置330は、各種センサから入力した検出信号に基づいて把握されるエンジンの運転状態等を検知するとともに、上記各種機器の駆動回路の指令信号を出力する。こうしてエンジンの運転制御がエンジン制御装置330を通じて実施される。
【0058】
また、上記表示装置340では、運転支援態様決定部310から地図表示の画像データが入力されたり、ドライバに対して注意を喚起するために運転支援態様決定部310から出力された警告表示の画像データ等が入力され、各画像データに対応した画像が表示される。例えば、運転支援態様決定部310は、自車両の現在位置とその周辺の地図とを組み合わせた画像データを出力して、自車両の位置とその周辺の地図とが組み合わされた画像を表示装置に表示させる。このような構成により、表示装置340には、自車両の位置を表す自車位置マークや経路情報及び誘導情報などが道路地図とともに表示される。
【0059】
また一方、上記音声装置350では、運転支援態様決定部310から送信される信号に基づいて、ドライバへの注意喚起や音声案内が行われる。そして、運転支援態様決定部310では、上記探索された経路に基づいて、現在地から目的地に至るまでの推奨経路の案内等が音声装置350や表示装置340を介して行われる。
【0060】
このように構成される運転支援部300では、上記静止障害物に対する対応制御として、
走行中の自車両の進行方向前方に停車している車両が発進する可能性が低いと予測されたときには、例えば、この車両との必要最低限の車間距離を確保した上での経路の選択等の運転支援が行われる。この運転支援としては、例えば上記表示装置340による視覚的な減速案内、上記音声装置350による音声案内等が行われる。
【0061】
また、運転支援部300では、上記可動障害物に対する対応制御として、走行中の自車両の進行方向前方に停車している車両が発進する可能性が高いと予測されたときには、例えば、この車両の存在を自車両に対するリスクとして考慮した経路選択や減速案内、警告等の運転支援が行われる。この運転支援としては、例えば上記ブレーキ制御装置320やエンジン制御装置330によって予備制動を行う制御、表示装置340による視覚的な減速案内、音声装置350による音声案内等が行われる。これにより、例えば、自車両が追い越そうとしている停車中の車両が発進する可能性が高いものの、この車両に対する車間距離等が十分でないときには、同車両との車間距離を促す旨がドライバに対して通知されるようになる。
【0062】
このように上記構成によれば、自車両の周辺に存在する車両の行動の予測に基づき各対応制御が実行されることにより、自車両の周辺に存在する車両の行動に応じた適切な運転支援が選択的に行われるようになる。これにより、自車両の周辺に存在する車両に対するリスクを好適に抑制しつつも、現在地から目的地に至るまでの旅行時間が短縮されるようになる。
【0063】
以下、図2及び図3を参照して本実施の形態による移動体の行動予測方法を詳述する。なお、図2は、移動体としての車両を構成する部品毎(属性情報毎)の温度情報から特定され、予測される車両の現状態及び未来状態の関係の一例を示したものであり、図3は、こうした予測に基づく車両の状態推移の一例を示したものである。なお、本実施の形態では、図2に示すマップは上記車両状態特定部220及び車両行動予測部230に予め登録されている。
【0064】
図2に示すように、車両等を構成する部品の温度とは、その車両の状態に依存して変化する傾向にある。例えば、車両を構成するタイヤは、走行中に路面との摩擦により発熱することから走行中や停車直後はタイヤの温度が高い一方、停車から一定時間が経過するとタイヤの温度は低下する。また、車両を構成する排気管は、エンジンが動作中のときには排気熱により熱せられるため高温となる一方、エンジンの停止時には排気の停止に伴い次第に低温となる。このように、車両を構成する各部品の温度とは、それらの機能が反映された固有の温度となっており、部品毎の温度情報に基づけば車両の現状態を特定することができるようになるとともに車両の行動を予測することができるようになる。
【0065】
すなわち、図2に示すように、上記部品情報整理部213により部品毎に関連付けられた検知対象としての車両のタイヤの温度が低く、かつ、同車両の排気管の温度も低いときには、この車両の現状態は「停車継続中」であると特定できる。そしてこの場合には、当該車両が発進する可能性が低いと予測することができる。一方、この車両のタイヤの温度が低い場合であっても、同車両の排気管の温度が高いときには、同車両の現状態は「発進待機状態」にあると特定できる。そしてこの場合には、当該車両が発進する可能性が高いと予測することができる。
【0066】
また、上記関連付けられた検知対象としての車両のタイヤの温度が高く、同車両の排気管の温度が低いときには、この車両の現状態は「停車直後」であると特定できる。そしてこの場合には、当該車両が発進する可能性が低いと予測することができる。一方、この車
両のタイヤの温度が高く、かつ、同車両の排気管の温度も高いときには、この車両の現状態は「停車直後」もしくは「発進待機状態」であると特定できる。そしてこの場合には、当該車両が発進する可能性が高いと予測することができる。
【0067】
このように本実施の形態によれば、車両を構成する各部品、すなわち上記識別された属性情報毎に固有の温度情報の組み合わせを通じて、車両の現状態を特定することができるようになるとともに、この特定された車両の現状態に基づいて当該車両の行動を予測することができるようになる。このため、上記属性情報及び温度情報に基づく車両の現状態の特定及び予測を多観点から行うことができるようになる。これにより、特定可能な車両の現状態のバリエーションが拡大されるようになるとともに、より高精度な行動予測が可能となる。
【0068】
次に、こうした予測に基づく車両の状態遷移の一例を図3を参照して説明する。
図3に推移例Laとして示すように、自車両の周辺に他車両がタイミングt1(過去)からタイミングt2(現在)にかけて継続して停車していたとする。そして、この停車中の車両のタイヤの温度が低く、かつ、排気管の温度が低いときには、推移例Lbとして示すように、タイミングt2以降も停車状態を継続する可能性が高い、換言すれば、停車中の車両が発進する可能性が低いと予測することができる。
【0069】
一方、停車中の車両のタイヤの温度が低く、排気管の温度が高いときには、推移例Lcとして示すように、タイミングt2以降、停車状態から走行状態へと遷移する可能性が高い、換言すれば、停車中の車両が発進する可能性が高いと予測することができる。
【0070】
以下、本実施の形態による移動体の行動予測手順及び運転支援手順を図4を参照して総括する。
図4に示すように、まずステップS100において、上記移動体検出部110によって自車両の周辺における他車両の存在の有無が検出される。次いで、この検出結果に基づき自車両の周辺に他車両が存在していると判断されると、この他車両の速度や位置等に基づき当該車両が停止しているか否かが判断される(ステップS101:YES、S102)。
【0071】
こうして、検知対象とされた他車両が停止していると判断されたときには、この停止中の車両を構成する排気管やタイヤ等の各部品の物理的性質が上記物性検出部120によって検出される(ステップS103)。また併せて、この物理的性質の検出の対象とされた各部品の温度が上記温度検出部130によって検出される(ステップS104)。
【0072】
次いで、物性検出部120による検出結果に基づいて検知対象とされた車両の各部品の属性が識別され、当該部品が排気管やタイヤ、窓等のいずれの部品であるかが識別される(ステップS105)。こうして検知対象とされた車両の各部品の識別が行われると、各々識別された各部品(属性情報)に該当する温度情報が関連付けられる(ステップS106)。
【0073】
そして、それら関連付けられた部品毎の温度情報の組み合わせを通じて、検知対象とされた車両の現状態が特定され(ステップS107)、この特定された車両の現状態に基づき当該車両が発進する可能性が予測される(ステップS108)。
【0074】
こうした予測結果に基づき、停車中の車両が発進する可能性が低いと判断されたときには、静止障害物に対する対応制御が上記ブレーキ制御装置320、エンジン制御装置330、表示装置340、音声装置350等を介して実行される(ステップS109:YES、S110)。
【0075】
一方、上記予測結果に基づき、停車中の車両が発進する可能性が高いと判断されたときには、可動障害物に対する対応制御が上記ブレーキ制御装置320、エンジン制御装置330、表示装置340、音声装置350等を介して実行される(ステップS109:NO、S111)。
【0076】
また一方、自車両の周辺に他車両が存在していない場合(ステップS101:NO)、及び自車両の周辺に存在している車両が走行状態にある場合(ステップS102:NO)には、この車両に対する行動予測を行うことなく、再度、上記移動体検出部110による自車両の周辺の車両の存在の有無の検知が行われるようになる。
【0077】
そして、こうした自車両の周辺に存在する停止車両の検出、及び同検出された車両の現状態の特定、及び同特定された車両の現状態に基づく行動予測が適宜行われることにより、自車両の周辺に存在する車両の行動を踏まえた運転支援が適宜実行されるようになる。これにより、自車両の周辺に存在する車両に対するリスクを好適に抑制しつつも、現在地から目的地に至るまでの旅行時間が短縮されるようになる。
【0078】
以上説明したように、本実施の形態にかかる行動予測装置及び行動予測方法及び運転支援装置によれば、以下の効果が得られるようになる。
(1)自車両の周辺に存在する車両を構成する各部品の物理的性質を検出するとともに同検出された物理的性質に基づき各部品の属性を識別し、同属性の識別の対象とされた車両の各部品の温度を検出することとした。そして、属性が識別された各部品毎の属性情報と該当する温度情報とに基づいて、検知対象とされた車両の行動を予測することとした。このため、車両の状態に依存して変化する車両の各部品の温度情報に基づいて検知対象とされた車両の行動を予測することができるようになる。これにより、行動予測装置及び運転支援装置として簡易な構成でありながら、検知した車両の行動を高い信頼性のもとに予測することができるようになる。
【0079】
(2)上記物性検出部120及び温度検出部130によって車両の異なる複数の部分についてそれぞれ物理的性質を検出してその属性を識別するとともに、異なる複数の部分についてそれぞれ温度を検出することとした。そして、各々関連付けられた属性情報毎の温度情報の組み合わせを通じて、検知対象とされた車両の行動を予測することとした。これにより、属性情報毎に固有の温度情報の組み合わせを通じて、予測可能な車両の行動のバリエーションが拡大されるようになるとともに、より高精度な車両の行動予測が実現されるようになる。
【0080】
(3)上記属性識別部210により識別された属性情報と上記温度検出部130により検出された温度情報とに基づき車両の現状態を特定するとともに、この特定した車両の現状態から同車両の行動を予測することとした。これにより、車両の現状態と未来の状態との相関性を利用した車両の行動予測が実現されるようになる。
【0081】
(4)上記移動体検出部110及び物性検出部120及び温度検出部130を、一のスペクトルセンサ100によって構成することとした。このため、自車両の周辺における車両等の存在の有無はもとより、この車両を構成する各部品の属性及び温度を一つのセンサのみによって取得することができるようになる。これにより、上記運転支援装置としてより簡易な構成が実現されるようになる。また、こうした構成によれば、スペクトルセンサ100により取得される同一のスペクトルデータに基づく各種情報の解析、管理が可能となり、検知対象とされた各部品の属性情報及び温度情報の抽出やそれら属性情報と温度情報との関連付けをはじめとした各種処理を円滑に行うことができるようになる。
【0082】
(5)上記行動予測装置200によって予測された車両の行動に関する情報に基づきドライバに対する運転支援を行うこととした。これにより、自車両の周辺に存在する車両の行動の予測を通じて、その予測結果を踏まえた適切な運転支援を行うことができるようになり、運転支援にかかる信頼性が高められるようになる。
【0083】
(6)上記運転支援の一つとして、上記予測された車両の行動に関する情報に基づき、停止状態にある車両が停止状態を継続するときの静止障害物に対する対応制御、及び停止状態にある車両が停止状態から走行状態に推移するときの可動障害物に対する対応制御、のいずれか一方を選択的に実行することとした。運転支援装置としてこのような構成によれば、自車両の周辺に停止している車両が発進する可能性が低いときには、この車両との必要最低限の車間距離を確保した上での経路の選択等の運転支援が選択的に実行されるようになる。また、停止状態にある車両が発進する可能性が高いときには、この車両の存在を自車両に対するリスクとして考慮した経路選択や減速案内、警告等の運転支援が選択的に実行されるようになる。これにより、自車両の周辺に存在する車両に対するリスクを好適に抑制しつつも、現在地から目的地に至るまでの旅行時間が短縮されるようになる。
【0084】
(第2の実施の形態)
以下、本発明にかかる行動予測装置及び行動予測方法及び運転支援装置を具体化した第2の実施の形態について図5〜図8を参照して説明する。図5に、本実施の形態の行動予測装置及び行動予測方法が適用される運転支援装置の概略構成を示す。なお、この第2の実施の形態は、検知対象とする車両の周辺に存在する気体成分に関する情報を加味して当該車両の行動を予測するものであり、その基本的な構成は先の第1の実施の形態と共通になっている。
【0085】
図5は、先の図1に対応する図として、この第2の実施の形態にかかる行動予測装置及び行動予測方法が適用される運転支援装置の概略構成を示したものである。なお、この図5において、先の図1に示した各要素と同一の要素についてはそれぞれ同一の符号を付して示しており、それら要素についての重複する説明は割愛する。
【0086】
図5に示すように、本実施の形態のスペクトルセンサ100は、検知対象とする車両の周辺に存在する排気ガス等の気体成分を検出する気体成分検出部140をさらに備えている。また、本実施の形態の属性識別部210は、気体成分検出部140にて検出された気体成分情報と上記部品識別部211にて識別された部品毎の属性情報とに基づき、検知対象とされた車両のエンジンの状態を識別するエンジン状態識別部214をさらに備えている。なお、こうした気体成分もスペクトルセンサ100により観測されたスペクトルデータから抽出される。
【0087】
このように構成される運転支援装置では、例えば自車両の周辺に存在する車両が上記移動体検出部110によって検知されると、この検知された車両や同車両を構成する排気管やタイヤ等の各部品の材質や色、形状等の物理的性質が上記物性検出部120にて検出される。また、上記移動体検出部110にて検出された車両や同車両を構成する排気管やタイヤ等の各部材の温度情報が上記温度検出部130にて検出される。
【0088】
そして、上記物性検出部120によって検知対象とされた車両の各部品の物理的性質が検出されると、この車両を構成する各部品のうちの排気管の位置が上記部品識別部211による識別結果に基づき特定される。こうして検知対象とされた車両の排気管の位置が特定されると、この排気管周辺の気体成分が上記気体成分検出部140によって検出される。そして、この気体成分検出部140により検出された気体成分情報は上記エンジン状態識別部214に入力される。
【0089】
エンジン状態識別部214では、気体成分検出部140にて検出された気体成分情報に基づいて、検知対象とされた車両の排気管から排気ガスが排出されているか否かが識別される。そして、エンジン状態識別部214では、上記気体成分情報に基づき当該車両の排気管から排気ガスが排出されていないと判断されたときは、当該車両のエンジンが停止状態にあると識別される。一方、エンジン状態識別部214では、上記気体成分情報に基づき当該車両の排気管から排気ガスが排出されていると判断されたときは、当該車両のエンジンが稼働状態にあると識別されるとともに、排気ガス中のNox濃度に基づきエンジンの回転数が識別される。
【0090】
こうして、検知対象とされた車両のエンジンの状態が識別されると、この識別結果が上記車両状態特定部220に入力される。そして、車両状態特定部220では、上記エンジン状態識別部214にて識別されたエンジンの状態を加味して、検知対象とされた車両の現状態が特定される。これにより、車両状態特定部220では、検知対象とする車両の各部品毎の温度情報のみならず、同車両のエンジンの状態を加味して車両の現状態を特定することができるようになり、検知対象とする車両の現状態をより詳細に分類することができるようになる。
【0091】
そして、こうした車両状態特定部220による特定結果は、上記車両行動予測部230に入力され、先の第1の実施の形態と同様、検知対象とされた車両の現状態に基づく行動予測、及び運転支援が適宜実行されるようになる。
【0092】
以下、図6及び図7を参照して本実施の形態による移動体の行動予測方法を詳述する。なお、図6は、車両を構成する排気管の温度情報と同排気管から排出される排気ガス成分とに基づき特定される車両の現状態の一例を示したものである。また、図7は、先の図2に対応する図として、本実施の形態による行動予測方法に基づいて車両を構成する部品毎(属性情報毎)の温度情報及び気体成分情報から特定され、推定される車両の現状態及び未来状態の関係の一例を示したものである。なお、こうした図6及び図7に示すマップは、上記車両状態特定部220及び車両行動予測部230に予め登録されている。
【0093】
図6に示すように、エンジン等を駆動源とした車両は、その走行時に排気ガス等の気体を排出することが普通であり、こうした排気ガス中のNox(窒素酸化物)の濃度はエンジンの回転数に比例する。このように、検知対象とする車両の周辺に存在する気体成分とは、当該車両のエンジンの稼働状態が反映されるものである。このため、検知対象とする車両の周辺で検出された気体成分情報に基づけば、車両の現状態をより詳細に特定することができるようになるとともに同車両の行動をより詳細に予測することができるようになる。
【0094】
すなわち、図6に示すように、上記部品情報整理部213により部品毎に関連付けられた検知対象としての車両の排気管の温度が低く、この排気管の周辺に排気ガス成分が存在しないときには、この車両の現状態は「一定時間エンジンが停止している」状態であると特定できる。そしてこの場合には、当該車両が発進する可能性が無いものとして予測することができる。また、この車両の排気管の温度が高く、同排気管の周辺に排気ガス成分が存在しないときには、この車両の現状態は「エンジンが停止した直後」の状態であると特定できる。そしてこの場合にも、エンジンが停止しているために当該車両が発進する可能性が無いものとして予測することができる。
【0095】
また、検知対象としての車両の排気管の温度が低いものの、この排気管の周辺に排気ガス成分が存在し、同排気ガス成分中のNox濃度が低いときには、この車両の現状態は、「エンジン始動直後、かつ、同エンジンが低回転で稼働している」状態であると特定できる。そしてこの場合には、当該車両が発進する可能性がやや高い(発生可能性:中)と予
測することができる。また、同様に車両の排気管の周辺に存在する排気ガス成分中のNox濃度が低いものの、同排気管の温度が高いときには、この車両の現状態は、「エンジンが始動されてから一定時間が経過し、かつ、同エンジンが低回転で稼働している」状態であると特定できる。そしてこの場合にも、当該車両が発進する可能性がやや高い(発生可能性:中)と予測することができる。
【0096】
さらに、検知対象としての車両の排気管の温度が低く、この排気管の周辺に存在する排気ガス成分中のNox濃度が高いときには、この車両の現状態は、「エンジン始動直後、かつ、同エンジンが高回転で稼働している」状態であると特定できる。そしてこの場合には、当該車両が発進する可能性が高いと予測することができる。また同様に、車両の排気管の周辺に存在する排気ガス成分中のNox濃度が高く、かつ、同排気管の温度も高いときには、この車両の現状態は、「エンジンが始動されてから一定時間が経過し、かつ、同エンジンが高回転で稼働している」状態であると特定できる。そしてこの場合にも、当該車両が発進する可能性が高いと予測することができる。
【0097】
このように本実施の形態によれば、排気管の温度が同一の温度であっても、その温度情報に同排気管の周辺に存在する気体成分情報を加味することにより、換言すれば、各々識別された部品毎の温度情報にさらに気体成分情報を組み合わせることにより、検知対象とされた車両の現状態をより詳細に特定することができるようになる。特に、検知対象とされた車両の排気管の温度が高いときには、その温度情報のみによっては同車両が停止直後(発進可能性:低)なのか、あるいは、エンジンが始動された直後(発進可能性:高)なのかを判別することは困難である。しかし、本実施の形態によれば、検知対象とする車両の現状態を特定する上で上記気体成分情報を加味することにより、当該車両が停止直後なのか、あるいは、エンジンが始動された直後なのかも判別することができるようになる。
【0098】
そして、図7に、先の図2に対応する図として上記気体成分情報を加味して特定され、推定される車両の現状態及び未来状態の関係の一例を示すように、検知対象とする車両の周辺に存在する気体成分情報として同車両から排出される排気ガス成分中のNox濃度が加味された分、車両の現状態がより詳細に分類されるようになる。そのため、検知対象とされた車両の詳細な分類結果に基づくきめ細かい行動予測が実現されるようになり、上記運転支援態様決定部310では、各々予測された車両の行動に応じた的確な運転支援が実行されるようになる。
【0099】
また、本実施の形態では、図7に示すように、検知対象とする車両の排気管から排出される排気ガス成分中のNox濃度が高いときには、換言すれば、当該車両のエンジンが高回転であるときには、当該車両のドライバに発進意図があると推定することができる。このため、検知対象とされた車両から乗員が乗降する可能性が低いと推定することができる。これにより、上記車両行動予測部230では、検知対象とされた車両から乗員の乗降する可能性が低いと推定されたときには、当該車両のドアが開閉する可能性が低い予測することができる。そして、上記運転支援態様決定部310では、この予測結果に基づき、検知対象とされた車両のドアの開閉可能性をも考慮した運転支援として、例えば当該車両との車間距離等の案内が行われるようになる。
【0100】
以下、本実施の形態による移動体の行動予測手順及び運転支援手順を図8を参照して総括する。
図8に示すように、本手順では、まずステップS200において上記移動体検出部110により自車両の周辺における他車両の存在の有無が検出される。次いで、この検出結果に基づき自車両の周辺に他車両が存在していると判断されると、この他車両の速度や位置等に基づき当該車両が停止しているか否かが判断される(ステップS201:YES、S202)。
【0101】
こうして、検知対象とされた他車両が停止していると判断されたときには、この停止中の車両を構成する排気管やタイヤ等の各部品の物理的性質が上記物性検出部120によって検出される(ステップS203)。また併せて、この物理的性質の検出の対象とされた各部品の温度が上記温度検出部130によって検出される(ステップS204)。
【0102】
次いで、物性検出部120による検出結果に基づいて検知対象とされた車両を構成する各部品の属性が識別され、当該部品が排気管やタイヤ、窓等のいずれの部品であるかが識別される(ステップS205)。
【0103】
そして、本実施の形態では、この識別結果に基づき検知対象とされた車両の排気管が識別され、その位置が特定されると、この排気管の周辺に存在する気体成分が上記気体成分検出部140によって検出される(ステップS206)。こうして気体成分情報が検出されると、この気体成分情報が検知対象とされた車両の排気管から排出される排気ガスであるとして関連付けられるとともに、各々識別された各部品(属性情報)に該当する温度情報が関連付けられる(ステップS207)。
【0104】
そして、上記検出された気体成分情報のうちのNox濃度に基づき検知対象とされた車両のエンジンの稼働状態が識別される(ステップS208)。次いで、この識別されたエンジンの稼働状態と上記関連付けられた部品毎の温度情報との組み合わせを通じて、検知対象とされた車両の現状態が特定され(ステップS209)、この特定された車両の現状態に基づき当該車両が発進する可能性が予測される(ステップS210)。この結果、先の図7に示したように、検知対象とされた車両が発進する可能性が、それぞれ「発進可能性:無」、「発進可能性:中」、「発進可能性:高」として予測されるようになる。
【0105】
こうした予測結果に基づき、停車中の車両の発生可能性が「無」であると判断されたときには、静止障害物に対する対応制御が上記ブレーキ制御装置320、エンジン制御装置330、表示装置340、音声装置350等を介して実行される(ステップS211:YES、S212)。
【0106】
一方、上記予測結果に基づき、停車中の車両の発進可能性が「中」もしくは「高」であると判断されたときには、可動障害物に対する対応制御が上記ブレーキ制御装置320、エンジン制御装置330、表示装置340、音声装置350等を介して実行される(ステップS211:NO、S213)。
【0107】
また一方、自車両の周辺に他車両が存在していない場合(ステップS201:NO)、及び自車両の周辺に存在している車両が走行状態にある場合(ステップS202:NO)には、この車両に対する行動予測を行うことなく、再度、上記移動体検出部110による自車両の周辺の車両の存在の有無の検知が行われるようになる。
【0108】
そして、こうした自車両の周辺に存在する停止車両の検出、及び同検出された車両の現状態の特定、及び同特定された車両の現状態に基づく行動予測が適宜行われることにより、自車両の周辺に存在する車両の行動を踏まえた運転支援が適宜実行されるようになる。これにより、自車両の周辺に存在する車両に対するリスクを好適に抑制しつつも、現在地から目的地に至るまでの旅行時間が短縮されるようになる。
【0109】
以上説明したように、本実施の形態にかかる行動予測装置及び行動予測方法及び運転支援装置によれば、上記(1)〜(6)の効果が得られるとともに、さらに以下の効果が得られるようになる。
【0110】
(7)検知対象とする車両の周辺に存在する気体成分を検出するとともに、この検出された気体成分情報を加味して当該車両の行動を予測することとした。このため、検知対象とされた車両の行動を、同車両から排出される排気ガス成分といった観点からも予測することができるようになる。これにより、上記車両の行動予測にかかる精度がより高められるようになる。
【0111】
(8)検知対象とされた車両の周辺に存在する気体成分情報に基づき、当該車両のエンジンの状態を識別することとした。そして、この識別結果を加味して検知対象とされた車両の現状態を特定するとともに、この特定された車両の現状態に基づいて同車両の行動を予測することとした。これにより、検知対象とされた車両の現状態をより詳細に分類、特定することができるようになり、この特定された車両の現状態に基づくきめ細かい行動予測が実現されるようになる。またこれにより、部品毎の温度情報のみによっては検知対象とされた車両の現状態を特定することが困難な場合であっても、その状態を特定することができるようになり、この特定された車両の現状態に基づく行動予測にかかる信頼性が好適に高められるようにもなる。
【0112】
(第3の実施の形態)
以下、本発明にかかる行動予測装置及び行動予測方法及び運転支援装置を具体化した第3の実施の形態について図9〜図11を参照して説明する。図9に、本実施の形態の行動予測装置及び行動予測方法が適用される運転支援装置の概略構成を示す。なお、この第3の実施の形態は、上記属性情報及び温度情報に基づき検知対象とする車両に搭乗する乗員の有無を推定するとともに、この推定結果も加味して当該車両の行動を予測するものであり、その基本的な構成は先の第2の実施の形態と共通になっている。
【0113】
図9は、先の図1及び図5に対応する図として、この第3の実施の形態にかかる行動予測装置及び行動予測方法が適用される運転支援装置の概略構成を示したものである。なお、この図9において、先の図1及び図5に示した各要素と同一の要素についてはそれぞれ同一の符号を付して示しており、それら要素についての重複する説明は割愛する。
【0114】
図9に示すように、本実施の形態の行動予測装置200は、上記温度検出部130にて検出された温度情報と上記部品識別部211にて識別された部品毎の属性情報とに基づき、検知対象とされた車両に搭乗する乗員の有無を推定する乗員有無推定部240をさらに備えている。
【0115】
このように構成される運転支援装置では、例えば自車両の周辺に存在する車両が上記移動体検出部110によって検知されると、この検知された車両や同車両を構成する排気管やタイヤ等の各部品の材質や色、形状等の物理的性質が上記物性検出部120にて検出される。また、上記移動体検出部110にて検出された車両や同車両を構成する排気管やタイヤ等の各部材の温度情報が上記温度検出部130にて検出される。
【0116】
そして、先の第2の実施の形態と同様、上記属性識別部210により検知対象とされた車両を構成する各部品の識別や同車両のエンジンの稼働状態の識別等が行われると、上記車両状態特定部220では、各々識別された結果に基づいて検知対象とされた車両の現状態が特定される。
【0117】
さらに、本実施の形態では、上記乗員有無推定部240によって、各々関連付けられた車両の部品毎の温度情報のうちの同車両の窓の温度情報に基づいて当該車両に搭乗する乗員の有無が推定される。詳述すると、乗員有無推定部240では、検知対象とされた車両の窓の領域の温度情報に基づき、車室内の温度が例えば「0℃」以下や「45℃」以上などのように乗員の存在に適さない温度であると判断されたときには、同車両に乗員が存在
する可能性が低いと推定される。また、乗員有無推定部240では、検知対象とされた車両の窓の領域の温度情報に基づき、車室内に人物の体温と同等の温度領域が存在すると判断されたときには、同車両に乗員が存在している可能性が高いと推定される。
【0118】
そして、こうした乗員有無推定部240による推定結果が上記車両行動予測部230に入力される。こうして車両行動予測部230では、乗員有無推定部240にて推定された乗員の推定結果を加味して検知対象とされた車両の行動が予測され、先の第1及び第2の実施の形態と同様、検知対象とされた車両の行動予測に応じた運転支援が適宜実行されるようになる。
【0119】
以下、図10を参照して本実施の形態による移動体の行動予測方法を詳述する。なお、この図10は、先の図2及び図7に対応する図として、本実施の形態による行動予測方法に基づいて車両の部品毎(属性情報毎)の温度情報及び気体成分情報から特定され、推定される車両の現状態及び未来状態の関係の一例を示したものである。また、こうした図10に示すマップも、上記車両状態特定部220及び車両行動予測部230に予め登録されている。
【0120】
図10から明かなように、本実施の形態では、上記乗員有無推定部240により乗員の有無が推定された分、同車両の行動の予測基準が拡大されるようになる。すなわち、同図10に示すように、検知対象とされた車両の窓の温度情報に基づき、同車両の室内の温度が乗員の存在に適さない温度であると判断されたときには、この車両には乗員が存在していないと判断できる。このため、検知対象とされた車両から乗員が乗降する可能性が無く、同車両のドアが開閉される可能性が無いものとして予測できる。またこのときには、検知対象とされた車両には同車両を操作する乗員が存在していないために、当該車両が発進する可能性が無いものとして一様に予測することも可能である。これにより、検知対象とされた車両に対する乗員の有無の判別を通じて車両の行動をより高精度に予測することができるようになり、上記運転支援態様決定部310では、各々予測された車両の行動に応じた的確な運転支援が実行されるようになる。
【0121】
以下、本実施の形態による移動体の行動予測手順及び運転支援手順を図11を参照して総括する。
図11に示すように、本手順では、まずステップS200において上記移動体検出部110により自車両の周辺における他車両の存在の有無が検出される。そして、先の第2の実施の形態と同様に、検知対象とされた車両を構成する各部品の識別、及び同識別された部品毎の温度情報の関連付け、及び車両のエンジンの稼働状態の識別等が行われ、それらの識別結果に基づいて検知対象とされた車両の現状態が特定される(ステップS201〜S209)。
【0122】
そして、本実施の形態では、まずステップS209Aにおいて、上記部品情報整理部213により部品毎に関連付けられた各温度情報から、検知対象とされた車両の窓の領域の温度情報が抽出される。次いで、この抽出された窓の領域の温度情報に基づいて、検知対象とされた車両の乗員の有無が推定される(ステップS209B)。なお、こうした乗員の有無の推定は、例えば、上記抽出された温度情報から求められる車室内の温度が、乗員の存在に不適切な温度であるか否かを判別する閾値以上であるか否か、もしくは同閾値以下であるか否かの判別を通じて行われる。また、各閾値としては、例えば「45℃」や「0℃」といった温度が設定されている。
【0123】
次いで、上記乗員有無推定部240によって乗員の有無が推定されると、この推定結果と上記特定された車両の現状態とに基づいて検知対象とされた車両が発進する可能性が予測される(ステップS210)。この結果、先の図10に示したように、検知対象とされ
た車両が発進する可能性が、それぞれ「発進可能性:無」、「発進可能性:中」、「発進可能性:高」として予測されるようになる。また併せて、車両に搭乗している乗員の乗降可能性が、それぞれ「乗降可能性:無」、「乗降可能性:低」として予測されるようになる。
【0124】
そして本実施の形態においても、上記予測結果に基づき停車中の車両の発生可能性が「無」であると判断されたときには、静止障害物に対する対応制御が上記ブレーキ制御装置320、エンジン制御装置330、表示装置340、音声装置350等を介して実行される(ステップS211:YES、S212)。
【0125】
一方、上記予測結果に基づき、停車中の車両の発進可能性が「中」もしくは「高」であると判断されたときには、可動障害物に対する対応制御が上記ブレーキ制御装置320、エンジン制御装置330、表示装置340、音声装置350等を介して実行される(ステップS211:NO、S213)。
【0126】
また一方、自車両の周辺に他車両が存在していない場合(ステップS201:NO)、及び自車両の周辺に存在している車両が走行状態にある場合(ステップS202:NO)には、この車両に対する行動予測を行うことなく、再度、上記移動体検出部110による自車両の周辺の車両の存在の有無の検知が行われるようになる。
【0127】
そして、こうした自車両の周辺に存在する停止車両の検出、及び同検出された車両の現状態の特定、及び同特定された車両の現状態に基づく行動予測が適宜行われることにより、自車両の周辺に存在する車両の行動を踏まえた運転支援が適宜実行されるようになる。これにより、自車両の周辺に存在する車両に対するリスクを好適に抑制しつつも、現在地から目的地に至るまでの旅行時間が短縮されるようになる。
【0128】
以上説明したように、本実施の形態にかかる行動予測装置及び行動予測方法及び運転支援装置によれば、上記(1)〜(8)の効果が得られるとともに、さらに以下の効果が得られるようになる。
【0129】
(9)検知対象とされた車両の窓の領域の温度情報に基づき同車両に搭乗する乗員の有無を推定し、この推定結果を加味して同車両の行動を予測することとした。これにより、検知対象とされた車両の行動を決定する乗員の有無に基づいた行動予測が可能となり、この乗員により操作される車両の行動をより高い信頼性のもとに予測することができるようになる。
【0130】
(第4の実施の形態)
以下、本発明にかかる行動予測装置及び行動予測方法及び運転支援装置を具体化した第4の実施の形態について図12〜図15を参照して説明する。図12に、本実施の形態の行動予測装置及び行動予測方法が適用される運転支援装置の概略構成を示す。なお、この第4の実施の形態は、上記属性情報及び温度情報の推移から特定される車両の状態の変化傾向に基づいて当該車両の行動を予測するものであり、その基本的な構成は先の第3の実施の形態と共通になっている。
【0131】
図12は、先の図1、図5、図9に対応する図として、この第4の実施の形態にかかる行動予測装置及び行動予測方法が適用される運転支援装置の概略構成を示したものである。なお、この図12において、先の図1、図5、図9に示した各要素と同一の要素についてはそれぞれ同一の符号を付して示しており、それら要素についての重複する説明は割愛する。
【0132】
図12に示すように、本実施の形態の行動予測装置200は、上記部品情報整理部213にて関連付けられた部品毎(属性情報)の温度情報を漸次記憶する記憶手段としての部品情報記憶部250をさらに備えている。また、行動予測装置200は、部品情報記憶部250に記憶された部品毎の温度情報に基づいて、検知対象とされた車両の状態の変化傾向を算出する状態変化傾向算出部260をさらに備えている。
【0133】
このように構成される運転支援装置では、例えば自車両の周辺に存在する車両が上記移動体検出部110によって検知されると、この検知された車両や同車両を構成する排気管やタイヤ等の各部品の材質や色、形状等の物理的性質が上記物性検出部120にて検出される。また、上記移動体検出部110にて検出された車両や同車両を構成する排気管やタイヤ等の各部材の温度情報が上記温度検出部130にて検出される。
【0134】
そして、本実施の形態では、検知対象とされた車両の各部品の識別及び同識別された部品に対する温度情報の関連付けが上記部品識別部211及び部品情報整理部213にて行われると、この部品情報整理部213により整理された部品毎の温度情報が上記部品情報記憶部250に漸次入力される。そして、この部品情報記憶部250では、例えば検知対象とされた車両を単位として、この車両を構成する部品毎の温度情報が漸次記憶される。そして、こうした部品情報記憶部250に記憶された部品毎の温度情報は、上記状態変化傾向算出部260による状態変化傾向の算出に供される。また、状態変化傾向算出部260には、上記乗員有無推定部240にて推定された乗員の有無の推定結果と上記エンジン状態識別部214にて識別された車両のエンジンの稼働状態に関する情報とが適宜入力される。
【0135】
そして、状態変化傾向算出部260では、上記部品情報記憶部250に記憶された所定時間での部品毎の温度情報の推移と、各々入力された乗員の有無の推定結果及びエンジンの稼働状態に関する情報とに基づいて、検知対象とされた車両の状態の変化傾向が算出される。なお、本実施の形態では、検知対象とされた車両の状態の変化傾向として、停止状態にある車両が行動を開始する可能性の推移が求められる。すなわち本実施の形態では、上記部品毎に関連付けられた温度情報、及び乗員の有無の推定結果、及びエンジンの稼働状態に関する情報に基づいて、停止状態にある車両が行動を開始する可能性(発進可能性)の推移が先の図10等に示したマップデータの参照を通じて求められる。
【0136】
こうして、検知対象とされた車両の状態の変化傾向が算出されると、この算出結果が上記車両行動予測部230に入力される。そして、車両行動予測部230では、この車両の状態の変化傾向に基づいて検知対象とされた車両の行動が予測され、先の第1〜第3の実施の形態と同様、検知対象とされた車両の行動予測に応じた運転支援が適宜実行されるようになる。
【0137】
以下、図13を参照して本実施の形態による移動体の行動予測方法を詳述する。なお、この図13において図13(a)は、ある車両の状態遷移の一例を示しており、図13(b)は、同車両の機械的な状態の推移例を示しており、図13(c)は、同車両が走行を開始する可能性の推移例を示している。
【0138】
図13(a)及び(b)に示すように、通常、停止状態にある車両が走行を開始するまでには、車両に搭載された上記ブレーキ制御装置320やエンジン制御装置330をはじめとする各種システムの状態が遷移する。
【0139】
すなわち、図13(a)及び(b)に示すように、タイミングt0においてドライバによるエンジンのスタート操作が行われ、この操作がタイミングt1にて終了すると、これに伴って車両の各種機器を統括する制御システムが起動し、セルモータが作動するといっ
た態様で各種システムの状態が遷移する(期間T1)。すなわち、この期間T1が車両の状態が変化する遷移期間となる。一方、後続する期間T2、すなわちセルモータの作動に伴ってエンジンが駆動して以降は、車両の状態がアイドリング状態となり各種システムの状態が維持される。すなわち、この期間T2が車両の状態が安定する非遷移期間となる。そして、アイドリング状態となったことにより車両の状態が安定すると、例えばタイミングt3においてドライバによるブレーキ解除操作やアクセル操作等の各種操作が行われる。これにより、タイミングt4において、車両の状態が停止状態から走行状態へと遷移するようになる。
【0140】
また、この間の車両の発進可能性の推移を図13(c)に示すように、例えば期間T0においてエンジンが停止状態であったために「低」とされていた発進可能性は、後続する期間T1では制御システムの起動やセルモータの作動に伴って「中」へと増大する。すなわち、車両の状態が変化する期間T1では、車両の状態の変化に伴って同車両が発進する可能性も「低」から「中」へと変化することとなる。
【0141】
一方、期間T2では、車両のアイドリング状態が継続しているために、同車両の発進可能性は継続して「高」となっている。ただし、車両の状態がアイドリング状態へと推移した直後(タイミングt2)と、アイドリング状態へと推移してから期間T2経過後(タイミングt4)とでは、車両が発進する可能性はいずれも「高」となっているものの、車両が走行を開始するまでに期間T2のずれを有している。このため、車両の状態がアイドリング状態へと推移した直後と、アイドリング状態が継続しているときとでは、アイドリング状態が継続しているときの方が停止状態にある車両が走行を開始するまでの時間が短いことが確認できる。すなわち、車両の現状態に対して、同車両の過去の状態との間で変化が生じているときと、同車両の過去の状態との間で変化が生じていないときとでは、車両の状態が維持されているときの方が同車両の発進可能性が高いことが確認できる。
【0142】
そこで本実施の形態では、車両の状態の変化傾向として同車両の部品毎の温度情報やエンジンの稼働状態等から同車両の発進可能性の変化傾向を求めるとともに、この変化傾向に基づいて車両の行動を予測することとする。
【0143】
図14に、車両の発進可能性の変化傾向と同変化傾向から求められた車両の行動の予測結果との関係を示す。
図14に示すように、検知対象とされた車両の部品毎の温度情報やエンジンの稼働状態等に基づき同車両の現時点での発進可能性が高いと判別されたとすると、同車両の発進可能性が維持されているときの方が、同車両の発進可能性が「中」から「高」へと増大して変化したときよりも発進可能性が高い。また同様に、ある時点での車両の発止可能性がやや高い(発進可能性:中)と判別されたときには、同車両の発進可能性が維持されているときの方が、同車両の発進可能性が増大または減少して変化したときよりも発進可能性が高い。さらに、ある時点での車両の発止可能性が低いと判別されたときには、同車両の発進可能性が維持されているときの方が、同車両の発進可能性が「中」から「低」へと減少して変化したときよりも発進可能性が高い。
【0144】
このように本実施の形態によれば、検知対象とされた車両の状態の変化傾向として同車両が行動を開始する可能性の推移を求めるとともに、この可能性の推移に基づいて同車両の行動を予測することにより、車両が行動を開始するまでの時間差を利用したより細やかな予測が実現されるようになる。
【0145】
以下、本実施の形態による移動体の行動予測手順及び運転支援手順を図15を参照して総括する。
図15に示すように、本手順では、まずステップS300において上記移動体検出部1
10により自車両の周辺における他車両の存在の有無が検出される。そして、先の第3の実施の形態と同様に、検知対象とされた車両を構成する各部品の識別、及び同識別された部品毎の温度情報の関連付け、及び車両のエンジンの稼働状態の識別等が行われる(ステップS301〜ステップS308)。
【0146】
そして本実施の形態では、ステップS309において、上記関連付けられた各部品(属性情報)毎の温度情報が漸次記憶される。次いで、先の第3の実施の形態と同様、検知対象とされた車両の乗員の有無が推定されると(ステップS310、S311)、上記関連付けられた各部品毎の温度情報、及び上記識別されたエンジンの稼働状態、及び上記推定された乗員の推定結果に基づいて、当該車両の発進可能性の推移が算出される(ステップS312)。
【0147】
こうして、検知対象とされた車両の発進可能性の推移が算出されると、この算出された発進可能性の推移に基づいて検知対象とされた車両が発進する可能性が予測される(ステップS313)。この結果、先の図14に示したように、検知対象とされた車両が発進する可能性が、それぞれ「発進可能性:無(+)」、「発進可能性:無(−)」、「発進可能性:中(+)」、「発進可能性:中(−)」、「発進可能性:高(+)」、「発進可能性:高(−)」として予測されるようになる。
【0148】
そして、本実施の形態においても、こうした予測結果に基づき、停車中の車両の発生可能性が「無(+)」、「無(−)」であると判断されたときには、静止障害物に対する対応制御が上記ブレーキ制御装置320、エンジン制御装置330、表示装置340、音声装置350等を介して実行される(ステップS314:YES、S315)。
【0149】
一方、上記予測結果に基づき、停車中の車両の発進可能性が「中(+)」、「中(−)」、「大(+)」、「大(−)」であると判断されたときには、可動障害物に対する対応制御が上記ブレーキ制御装置320、エンジン制御装置330、表示装置340、音声装置350等を介して実行される(ステップS314:NO、S316)。
【0150】
また一方、自車両の周辺に他車両が存在していない場合(ステップS301:NO)、及び自車両の周辺に存在している車両が走行状態にある場合(ステップS302:NO)には、この車両に対する行動予測を行うことなく、再度、上記移動体検出部110による自車両の周辺の車両の存在の有無の検知が行われるようになる。
【0151】
そして、こうした自車両の周辺に存在する停止車両の検出、及び同検出された車両の発進可能性の推移の算出、及び算出された発進可能性の推移に基づく行動予測が適宜行われることにより、自車両の周辺に存在する車両の行動を踏まえた運転支援が適宜実行されるようになる。これにより、自車両の周辺に存在する車両に対するリスクを好適に抑制しつつも、現在地から目的地に至るまでの旅行時間が短縮されるようになる。
【0152】
以上説明したように、本実施の形態にかかる行動予測装置及び行動予測方法及び運転支援装置によれば、上記(1)〜(9)の効果が得られるとともに、さらに以下の効果が得られるようになる。
【0153】
(10)検知対象とされた車両の各部品毎に関連付けられた温度情報を漸次記憶するとともに、同記憶された各部品毎の温度情報の推移、及び乗員の有無の推定結果、及びエンジン状態の識別結果から当該車両の状態の変化傾向を求めることとした。そして、この求められた変化傾向に基づいて検知対象とされた車両の行動を予測することとした。これにより、車両の状態変化を利用した幅広い行動予測が可能となる。
【0154】
(11)検知対象とされた車両の状態の変化傾向として停止状態にある車両の発進可能性の推移を求めることとした。そして、この求められた発進可能性の推移が一定であるときに停止状態にある車両が発進する可能性が高いとして同車両の行動を予測するとともに、
上記求められた発進可能性の推移が変化しているときに停止状態にある車両が発進する可能性が低いとして同車両の行動を予測することとした。これにより、車両が走行を開始するまでの時間差を利用したより詳細な行動予測が実現されるようになる。
【0155】
(第5の実施の形態)
以下、本発明にかかる行動予測装置及び行動予測方法及び運転支援装置を具体化した第5の実施の形態について図16及び図17を参照して説明する。図16に、本実施の形態の行動予測装置及び行動予測方法が適用される運転支援装置の概略構成を示す。なお、この第5の実施の形態は、検知対象とされた車両の乗降の可能性を加味して同車両の行動を予測するものであり、その基本的な構成は先の第4の実施の形態と共通になっている。
【0156】
図16は、先の図12に対応する図として、この第5の実施の形態にかかる行動予測装置及び行動予測方法が適用される運転支援装置の概略構成を示したものである。なお、この図12において、先の図1、図5、図9、図12に示した各要素と同一の要素についてはそれぞれ同一の符号を付して示しており、それら要素についての重複する説明は割愛する。
【0157】
図16に示すように、本実施の形態の車両行動予測部230は、検知対象とされた車両から同車両の乗員が乗降する可能性を推定する乗降可能性演算部231を備えている。
このように構成される運転支援装置では、例えば自車両の周辺に存在する車両が上記移動体検出部110によって検知されると、この検知された車両や同車両を構成する排気管やタイヤ等の各部品の材質や色、形状等の物理的性質が上記物性検出部120にて検出される。また、上記移動体検出部110にて検出された車両や同車両を構成する排気管やタイヤ等の各部材の温度情報が上記温度検出部130にて検出される。
【0158】
そして、本実施の形態では、検知対象とされた車両の発進可能性の推移が上記状態変化傾向算出部260にて算出されると、この算出結果が上記車両行動予測部230を構成する乗降可能性演算部231に入力される。また併せて、上記乗員有無推定部240にて同車両の乗員の有無が推定されると、この推定結果が乗降可能性演算部231に入力される。
【0159】
こうして乗降可能性演算部231では、検知対象とされた車両の発進可能性の推移と同車両に対する乗員の有無の推定結果とに基づいて、当該車両から乗員が乗降する可能性が求められる。そして、車両行動予測部230では、乗降可能性演算部231による演算結果に基づいて、検知対象である車両の行動として同車両からの乗員の乗降の有無や同車両の乗員の乗降に伴うドアの開閉動作の有無等が併せて予測され、その予測結果が上記運転支援態様決定部310に入力される。
【0160】
こうして運転支援態様決定部310では、例えば、検知対象とされた停止状態にある車両から乗員が乗降する可能性が高いと判別されたときには、その旨が上記表示装置340や音声装置350等を介してドライバに通知される。また同様に、検知対象とされた停止状態にある車両から乗員が乗降する可能性が高いと判別されたときには、同車両のドアの開閉動作を考慮した車間距離や走行経路の案内が上記表示装置340や音声装置350等を介して行われる。
【0161】
運転支援装置としてこのような構成によれば、検知対象とされた車両の状態変化と同車
両の乗員の有無の推定結果とに基づいて、当該車両からの乗員の乗降や同車両のドアの開閉動作等を踏まえた運転支援が実現されるようになる。
【0162】
以下、図17を参照して上記乗降可能性演算部231による乗員の乗降可能性の算出手順を説明する。
図17に示すように、本手順では、まずステップS400において、検知対象とされた停止状態の車両の乗員の有無が上記乗員有無推定部240による推定結果に基づき判断される。そして、検知対象とされた停止状態の車両に乗員が存在している判断されると、当該車両の発進可能性が減少しているか否かが上記状態変化傾向算出部260による算出結果に基づき判断される(ステップS401)。
【0163】
この結果、検知対象とされた車両に乗員が存在しており、かつ、同車両の発進可能性が減少傾向にあると判断されたときには、当該車両の状態が走行状態から停止状態に遷移した状態であると推定のもとに、同車両から乗員が乗降する可能性が高いと予測される(ステップS401:YES、S402)。
【0164】
一方、検知対象とされた車両に乗員が存在しており、かつ、同車両の発進可能性が減少傾向にはないと判断されたときには、当該車両のエンジンの稼働状態が高回転であるか否かが上記エンジン状態識別部214による識別結果に基づき判断される(ステップS401:NO、ステップS403)。そして、検知対象とされた車両のエンジンの稼働状態が高回転領域にあると判断されたときには、当該車両が発進待機状態にあり、同車両から乗員が乗降する可能性が低いと予測される(ステップS403:YES、S404)。また、検知対象とされた車両のエンジンの稼働状態が低回転領域であっても、当該車両の発進可能性が増大傾向にあるときには、当該車両が発進待機状態へと推移しているとの推定のもとに同車両から乗員が乗降する可能性が低いと予測される(ステップS405:YES、S404)。
【0165】
一方、検知対象とされた車両のエンジンの稼働状態が低回転領域であり、かつ、当該車両の発進可能性が増大傾向にも減少傾向にもなく一定であるときには、同車両から乗員が乗降する可能性がやや高い(乗降可能性:中)として予測される(ステップS405:NO、S406)。
【0166】
また一方、検知対象とされた車両に乗員が存在していないと判断されたときには、同車両から乗員が乗降する可能性が無いものとして予測される(ステップS400:NO、S407)。
【0167】
このように本実施の形態では、検知対象とされた車両の発進可能性の推移と同車両に対する乗員の有無の推定結果とに基づいて、当該車両から乗員が乗降する可能性が複数の段階に分けて予測される。これにより、検知対象とされた車両からの乗員の乗降や乗員の乗降に伴うドアの開閉動作等を詳細に予測することができるようになり、この予測結果に応じた運転支援が実現されるようになる。
【0168】
以上説明したように、本実施の形態にかかる行動予測装置及び行動予測方法及び運転支援装置によれば、上記(1)〜(11)の効果が得られるとともに、さらに以下の効果が得られるようになる。
【0169】
(12)検知対象とされた車両の発進可能性の推移と同車両の乗員の有無の推定結果とに基づいて、当該車両からの乗員の乗降の可能性を求めることとした。これにより、検知対象とされた車両のドアの開閉動作等をはじめとする詳細な行動予測が実現されるようになる。また、検知対象とされた車両からの乗員の乗降の可能性の有無に基づき、同車両か
ら乗降する乗員の存在をリスクとして考慮した行動予測が実現されるようにもなる。
【0170】
なお、上記各実施の形態は、以下のような形態をもって実施することもできる。
・上記各実施の形態では、上記運転支援部300による運転支援の一つとして、静止障害物に対する対応制御及び可動障害物に対する対応制御のいずれか一方を選択的に実行することとした。これに限らず、上記運転支援部300による運転支援として、検知対象とされた車両の予測結果に基づく自律運転支援を行うこととし、検知対象とされた車両の予測結果に応じた進路生成等を行うようにしてもよい。この他、上記運転支援部300による運転支援とは、検知対象とされた車両の予測結果を利用した運転支援であればよい。
【0171】
・上記各実施の形態では、上記移動体検出部110及び物性検出部120及び温度検出部130を、一のスペクトルセンサ100によって構成することとした。これに限らず、上記移動体検出部110を例えばカラーカメラやレーザーレーダー等によって構成し、カラーカメラにより撮像された画像情報やレーザーレーダーよる検出結果に基づいて自車両の周辺における他車両の存在の有無や同車両の位置、速度等を検出するようにしてもよい。また、上記物性検出部120を例えばカラーカメラ等によって構成し、このカラーカメラにより撮像された画像情報の処理を通じて検知対象とされた車両もしくは同車両を構成する各部品等の物理的性質を検出するようにしてもよい。さらに、上記温度検出部130を例えば赤外線カメラ等によって構成し、この赤外線カメラにより撮像された画像情報に基づいて検知対象とされた車両もしくは同車両を構成する各部品等の温度を検出するようにしてもよい。またこの他、上記スペクトルセンサ100と併せて、カラーカメラやレーザーレーダー、赤外線カメラ等の複数の装置を備える構成としてもよい。
【0172】
・上記第5の実施の形態では、検知対象とされた車両の乗員の乗降可能性を求め、この乗降可能性も加味して検知対象とされた車両の行動を予測することとした。これに限らず、同車両の乗員が不在のときには、同車両に搭乗する可能性が高い人物を監視し、この人物が停止車両に搭乗する可能性を求めるようにしてもよい。この場合には、例えば、上記移動体検出部110及び物性検出部120によって検知対象とする車両の周辺に存在する人物を検出するとともに、この検出された人物の歩行経路等に基づいて同人物が検知対象とされた車両に搭乗する可能性を求めることができる。これにより、この人物を自車両に対するリスクとした運転支援が可能になるとともに、同人物が車両に搭乗する際の車両のドアの開閉動作等の予測が可能となる。
【0173】
・上記第5の実施の形態では、検知対象とされた車両の乗員の乗降可能性を、当該車両の発進可能性と同車両のエンジンの稼働状態とに基づいて求めることとした。これに限らず、検知対象とされた車両の発進可能性のみから同車両からの乗員の乗降可能性を求めるようにしてもよい。またこの他、車両の状態の変化傾向に基づいて乗員の乗降可能性を求めるものであればよい。
【0174】
・上記第4及び第5の実施の形態では、車両の状態の変化傾向として、検知対象とされた車両の発進可能性の推移を用いることとした。これに限らず、車両の状態の変化傾向とは、上記属性情報及び温度情報に基づいて特定される車両の状態の変化傾向であればよく、例えば車室内の温度変化に基づいて乗員の存在の有無を推定するようにしてもよい。この場合には、検知対象とされた車両の停止状態が継続し、かつ、同車両の車室内の温度が乗員の存在に適した温度を超えて上昇しているときや同温度を超えた状態が維持されているときには、当該車両に乗員が存在しないと推定することができる。そして、この推定結果に基づき、検知対象とされた車両が発進する可能性や同車両から乗員が乗降する可能性が無いものとして予測することも可能である。また例えば、一定であった排気管の温度が上昇したときには、車両の状態が停止状態から発進待機状態へと遷移し、その後に発進する可能性が高いと判断することも可能である。この場合にも、車両の状態変化を利用した
幅広い行動予測が可能となる。
【0175】
・上記第4及び第5の実施の形態では、運転支援装置として、上記気体成分検出部140及びエンジン状態識別部214及び乗員有無推定部240を備える構成とした。これに限らず、検知対象とされた車両の属性情報の推移と該当する温度情報の推移とに基づき特定される車両の状態の変化傾向から当該車両の行動を予測する構成であればよく、上記気体成分検出部140及びエンジン状態識別部214及び乗員有無推定部240を割愛する構成としてもよい。この場合には、運転支援装置としての構成上の簡略化を図りつつも、車両の状態変化を利用した行動予測が可能となる。
【0176】
・上記第3の実施の形態では、検知対象とされた車両の乗員の有無を推定し、この推定結果と同車両の周辺の気体成分情報とを加味して同車両の現状態を特定することとした。これに限らず、上記属性情報及び温度情報に基づいて車両に搭乗する乗員の有無を推定するとともに、この推定結果を加味して車両の行動を予測する構成であればよく、上記気体成分検出部140及びエンジン状態識別部214を割愛する構成としてもよい。この場合には、運転支援装置としての構成上の簡略化を図りつつも、検知対象とされた車両の乗員の有無に基づいた行動予測が可能となる。
【0177】
・上記第2の実施の形態では、検知対象とされた車両の周辺に存在する気体成分に基づいて同車両の現状態を特定し、この特定された車両の現状態に基づいて車両の行動を予測することとした。これに限らず、上記気体成分検出部140にて検出された気体成分情報を加味して検知対象とされた車両の行動を予測する上では、気体成分情報に基づく車両の現状態の特定を行うことなく同車両の行動を予測することも可能である。この場合には、例えば、検知対象とされた停止状態の車両の周辺に存在する排気ガスのNox濃度が高いときには同車両が発進する可能性が高いとして予測し、同車両の周辺に存在する排気ガスのNox濃度が低いときには同車両が発進する可能性が低いとして予測することができる。
【0178】
・上記第2の実施の形態では、検知対象とする車両の周辺に存在する気体成分として同車両の排気管から排気される排気ガス成分を検出し、この排気ガス成分のNox濃度に基づいて車両のエンジンの稼働状態を識別することとした。これに限らず、検出対象とする気体成分とは、車両の現状態もしくは同車両の未来状態が反映される成分であればよい。
【0179】
・上記第1〜第3の各実施の形態では、検知対象とされた車両の現状態を上記属性情報及び温度情報に基づいて特定するとともに、この特定された車両の現状態に基づいて同車両の行動を予測することとした。これに限らず、上記属性情報及び温度情報に基づいて検知対象とされた車両の行動を予測するものであればよく、検知対象とされた車両の現状態を特定することなく同車両の行動を予測することも可能である。この場合には、先の図2、図7等に示したように、例えば、検知対象とされた車両のタイヤの温度が低く、かつ、タイヤの温度が低いときには、同車両が発進する可能性が無いと予測することが可能である。また、例えば、検知対象とされた車両のタイヤの温度が高く、かつ、タイヤの温度が高いときには、同車両が発進する可能性が高いと予測することが可能である。そしてこの場合には、上記車両状態特定部220を割愛することが可能となり、運転支援装置としての構成上の簡略化はもとより検知対象とされた車両の予測にかかる処理負荷が軽減されるようにもなる。
【0180】
・上記第1〜第5の各実施の形態では、上記物性検出部120及び属性識別部210と温度検出部130によって検知対象とされた車両の異なる複数の部分についてそれぞれ物理的性質を検出してその属性を識別するとともに、温度を検出することとした。そして、上記車両行動予測部230では、異なる複数の部分について各々関連付けられた属性情報
毎の温度情報の組み合わせに基づいて、検知対象とされた車両の行動を予測することとした。これに限らず、検知対象とされた車両もしくは同車両の一つの部分のみについて物理的性質を検出してその属性を識別するとともに、温度を検出することとしてもよい。そして、それら識別された識別情報と検出された温度情報とに基づいて検知対象とされた車両の行動を予測するようにしてもよい。
【0181】
・上記各実施の形態では、上記スペクトルセンサ100を、運転支援の対象とする車両に搭載することとした。これに限らず、例えば、上記スペクトルセンサ100をインフラとして道路上に複数配置し、このスペクトルセンサ100によって検出された車両毎の物理的性質に関する情報や温度情報等を、無線通信装置等を介して管理センターに集約するようにしてもよい。そして、管理センターでは、この集約された情報に基づき各車両の行動を予測し、その予測結果を運転支援の対象とする車両や各種端末に配信するようにしてもよい。この場合には、特に上記第4及び第5の実施の形態において、検知対象とする車両の長期的な状態変化を求めることが可能となる。これにより、検知対象とする車両の状態変化を利用した行動予測をより高精度に行うことができるようになる。
【0182】
・上記各実施の形態では、上記属性情報及び温度情報に基づいて、検知対象とされた停止状態にある車両の発進可能性やドアの開閉動作等を予測することとした。これに限らず、例えば、走行状態にある車両が停止する可能性を同車両の各部品の属性情報及び温度情報に基づいて予測するようにしてもよい。すなわち、検知対象とされた車両の行動と同車両や同車両を構成する各部品の属性情報及び温度情報との間に相関性が存在する場合には、この相関性を利用して車両の行動を予測することは可能である。
【0183】
・上記各実施の形態では、自車両の周辺に存在する車両を検知対象とするとともに、この車両の行動を予測することとした。この他、検知対象及び行動の予測対象としては、人物や動物等の移動体であってもよい。この場合にも、この移動体の属性情報及び温度情報に基づいて同移動体の行動を経験的に予測することは可能である。
【0184】
・上記各実施の形態では、上記行動予測装置及び行動予測方法を車両に搭載される運転支援装置に適用することとした。これに限らず、上記移動体検出部110及び物性検出部120及び温度検出部130を備えた単体の行動予測装置を構成し、この装置の周辺に存在する移動体の行動を予測することとしてもよい。
【0185】
・上記各実施の形態では、検知対象とされた移動体及び同移動体の一部の物理的性質と、同じく検知対象とされた移動体及び同移動体の一部の温度とを検出することとした。これに限らず、検知対象とされた移動体を単位として、その物理的性質と温度とを検出するとともに、この検出された温度情報と物理的性質に基づき識別された属性情報とに基づいて検知対象とされた移動体の行動を予測するようにしてもよい。また、検知対象とされた移動体の一部のみの物理的性質と温度とを検出するとともに、この検出された温度情報と物理的性質に基づき識別された属性情報とに基づいて検知対象とされた移動体の行動を予測するようにしてもよい。
【符号の説明】
【0186】
100…スペクトルセンサ、110…移動体検出部、120…物性検出部、130…温度検出部、140…気体成分検出部、200…行動予測装置、210…属性識別部、211…部品識別部、212…スペクトルデータベース、213…部品情報整理部、214…エンジン状態識別部、220…車両状態特定部、230…車両行動予測部、231…乗降可能性演算部、240…乗員有無推定部、250…部品情報記憶部、260…状態変化傾向算出部、300…運転支援部、310…運転支援態様決定部、320…ブレーキ制御装置、330…エンジン制御装置、340…表示装置、350…音声装置。
【特許請求の範囲】
【請求項1】
移動体の行動を予測する行動予測装置であって、
前記移動体の存在の有無を検出する移動体検出部と、該移動体検出部にて検出された移動体または同移動体の一部の物理的性質を検出する物性検出部と、該検出された物理的性質に基づきその特徴である属性を識別する属性識別部と、前記移動体検出部にて検出された移動体または同移動体の一部の温度を検出する温度検出部と、前記属性識別部により識別された属性情報と前記温度検出部により検出された温度情報とに基づき前記移動体の行動を予測する行動予測部とを備える
ことを特徴とする行動予測装置。
【請求項2】
前記物性検出部及び前記属性識別部と前記温度検出部とは前記移動体の異なる複数の部分についてそれぞれ前記物理的性質を検出してその属性を識別するとともに、前記温度を検出するものであり、前記行動予測部は、前記異なる複数の部分について各々関連付けられた属性情報毎の各々の温度情報の組み合わせに基づいて前記移動体の行動を予測する
請求項1に記載の行動予測装置。
【請求項3】
前記行動予測部は、前記属性識別部により識別された属性情報と前記温度検出部により検出された温度情報とに基づき前記移動体の現状態を特定するとともに、この特定した移動体の現状態から同移動体の行動を予測する
請求項1または2に記載の行動予測装置。
【請求項4】
前記移動体の周辺に存在する気体成分を検出する気体成分検出部をさらに備え、
前記行動予測部は、前記気体成分検出部にて検出された気体成分情報を加味して前記移動体の行動を予測する
請求項1〜3のいずれか一項に記載の行動予測装置。
【請求項5】
前記行動予測部は、前記気体成分検出部にて検出された気体成分情報を加味して該当する移動体の現状態を特定するとともに、この特定した移動体の現状態から同移動体の行動を予測する
請求項4に記載の行動予測装置。
【請求項6】
前記属性識別部により識別された属性情報と前記温度検出部により検出された温度情報とに基づき前記移動体に搭乗する乗員の有無を推定する乗員有無推定部をさらに備え、
前記行動予測部は、前記乗員有無推定部にて推定された前記移動体に対する乗員の有無を加味して前記移動体の行動を予測する
請求項1〜5のいずれか一項に記載の行動予測装置。
【請求項7】
前記属性識別部により識別された属性情報と前記温度検出部により検出された温度情報とを関連付けて漸次記憶する記憶手段をさらに備え、
前記行動予測部は、前記記憶手段に記憶された属性情報の推移と該当する温度情報の推移とに基づき特定される移動体の状態の変化傾向に基づいて前記移動体の行動を予測する
請求項1〜6のいずれか一項に記載の行動予測装置。
【請求項8】
前記行動予測部は、前記移動体の状態の変化傾向として停止状態にある移動体が行動を開始する可能性の推移を求め、この求めた行動を開始する可能性の推移が一定であるときに前記停止状態にある移動体が行動を開始する可能性が高いとして前記移動体の行動を予測するとともに、前記求めた行動を開始する可能性の推移が変化しているときには前記停止状態にある移動体が行動を開始する可能性が低いとして前記移動体の行動を予測する
請求項7に記載の行動予測装置。
【請求項9】
前記行動予測部は、前記移動体の状態の変化傾向に基づいて前記移動体との間で乗員が乗降する可能性をさらに求め、該求めた乗降の可能性を加味して前記移動体の行動を予測する
請求項7または8に記載の行動予測装置。
【請求項10】
前記移動体検出部及び前記物性検出部及び前記温度検出部は、一のスペクトルセンサによって構成される
請求項1〜9のいずれか一項に記載の行動予測装置。
【請求項11】
移動体の行動を予測する行動予測方法であって、
前記移動体または同移動体の一部の物理的性質を検出し、該検出された物理的性質に基づきその特徴である属性を識別するとともに、同属性の識別の対象とされた移動体または同移動体の一部の温度を検出して前記移動体または同移動体の一部の属性情報及び温度情報を抽出するステップと、
前記抽出した属性情報及び温度情報に基づいて前記移動体の行動を予測するステップとを含む
ことを特徴とする行動予測方法。
【請求項12】
前記移動体または同移動体の一部の属性情報及び温度情報を抽出するステップにおいて、前記移動体の異なる複数の部分についてそれぞれ前記物理的性質及び温度を検出することで前記属性情報及び温度情報を抽出し、
前記移動体の行動を予測するステップにおいて、前記異なる複数の部分について各々関連付けられた属性情報毎の各々の温度情報の組み合わせに基づいて移動体の行動を予測する
請求項11に記載の行動予測方法。
【請求項13】
前記移動体の行動を予測するステップにおいて、
前記抽出された属性情報及び温度情報に基づき前記移動体の現状態を特定するとともに、この特定した移動体の現状態から同移動体の行動を予測する
請求項11または12に記載の行動予測方法。
【請求項14】
自車両の周辺に存在する移動体の行動の予測に基づいてドライバに対する運転支援を行う運転支援装置であって、
請求項1〜10のいずれか一項に記載の行動予測装置によって予測された移動体の行動に関する情報に基づき前記運転支援を行う
ことを特徴とする運転支援装置。
【請求項15】
前記運転支援の一つとして、前記予測された移動体の行動に関する情報に基づき、停止状態にある移動体が停止状態を継続するときの静止障害物に対する対応制御、及び停止状態にある移動体が停止状態から移動状態に推移するときの可動障害物に対する対応制御、のいずれか一方を選択的に実行する
請求項14に記載の運転支援装置。
【請求項1】
移動体の行動を予測する行動予測装置であって、
前記移動体の存在の有無を検出する移動体検出部と、該移動体検出部にて検出された移動体または同移動体の一部の物理的性質を検出する物性検出部と、該検出された物理的性質に基づきその特徴である属性を識別する属性識別部と、前記移動体検出部にて検出された移動体または同移動体の一部の温度を検出する温度検出部と、前記属性識別部により識別された属性情報と前記温度検出部により検出された温度情報とに基づき前記移動体の行動を予測する行動予測部とを備える
ことを特徴とする行動予測装置。
【請求項2】
前記物性検出部及び前記属性識別部と前記温度検出部とは前記移動体の異なる複数の部分についてそれぞれ前記物理的性質を検出してその属性を識別するとともに、前記温度を検出するものであり、前記行動予測部は、前記異なる複数の部分について各々関連付けられた属性情報毎の各々の温度情報の組み合わせに基づいて前記移動体の行動を予測する
請求項1に記載の行動予測装置。
【請求項3】
前記行動予測部は、前記属性識別部により識別された属性情報と前記温度検出部により検出された温度情報とに基づき前記移動体の現状態を特定するとともに、この特定した移動体の現状態から同移動体の行動を予測する
請求項1または2に記載の行動予測装置。
【請求項4】
前記移動体の周辺に存在する気体成分を検出する気体成分検出部をさらに備え、
前記行動予測部は、前記気体成分検出部にて検出された気体成分情報を加味して前記移動体の行動を予測する
請求項1〜3のいずれか一項に記載の行動予測装置。
【請求項5】
前記行動予測部は、前記気体成分検出部にて検出された気体成分情報を加味して該当する移動体の現状態を特定するとともに、この特定した移動体の現状態から同移動体の行動を予測する
請求項4に記載の行動予測装置。
【請求項6】
前記属性識別部により識別された属性情報と前記温度検出部により検出された温度情報とに基づき前記移動体に搭乗する乗員の有無を推定する乗員有無推定部をさらに備え、
前記行動予測部は、前記乗員有無推定部にて推定された前記移動体に対する乗員の有無を加味して前記移動体の行動を予測する
請求項1〜5のいずれか一項に記載の行動予測装置。
【請求項7】
前記属性識別部により識別された属性情報と前記温度検出部により検出された温度情報とを関連付けて漸次記憶する記憶手段をさらに備え、
前記行動予測部は、前記記憶手段に記憶された属性情報の推移と該当する温度情報の推移とに基づき特定される移動体の状態の変化傾向に基づいて前記移動体の行動を予測する
請求項1〜6のいずれか一項に記載の行動予測装置。
【請求項8】
前記行動予測部は、前記移動体の状態の変化傾向として停止状態にある移動体が行動を開始する可能性の推移を求め、この求めた行動を開始する可能性の推移が一定であるときに前記停止状態にある移動体が行動を開始する可能性が高いとして前記移動体の行動を予測するとともに、前記求めた行動を開始する可能性の推移が変化しているときには前記停止状態にある移動体が行動を開始する可能性が低いとして前記移動体の行動を予測する
請求項7に記載の行動予測装置。
【請求項9】
前記行動予測部は、前記移動体の状態の変化傾向に基づいて前記移動体との間で乗員が乗降する可能性をさらに求め、該求めた乗降の可能性を加味して前記移動体の行動を予測する
請求項7または8に記載の行動予測装置。
【請求項10】
前記移動体検出部及び前記物性検出部及び前記温度検出部は、一のスペクトルセンサによって構成される
請求項1〜9のいずれか一項に記載の行動予測装置。
【請求項11】
移動体の行動を予測する行動予測方法であって、
前記移動体または同移動体の一部の物理的性質を検出し、該検出された物理的性質に基づきその特徴である属性を識別するとともに、同属性の識別の対象とされた移動体または同移動体の一部の温度を検出して前記移動体または同移動体の一部の属性情報及び温度情報を抽出するステップと、
前記抽出した属性情報及び温度情報に基づいて前記移動体の行動を予測するステップとを含む
ことを特徴とする行動予測方法。
【請求項12】
前記移動体または同移動体の一部の属性情報及び温度情報を抽出するステップにおいて、前記移動体の異なる複数の部分についてそれぞれ前記物理的性質及び温度を検出することで前記属性情報及び温度情報を抽出し、
前記移動体の行動を予測するステップにおいて、前記異なる複数の部分について各々関連付けられた属性情報毎の各々の温度情報の組み合わせに基づいて移動体の行動を予測する
請求項11に記載の行動予測方法。
【請求項13】
前記移動体の行動を予測するステップにおいて、
前記抽出された属性情報及び温度情報に基づき前記移動体の現状態を特定するとともに、この特定した移動体の現状態から同移動体の行動を予測する
請求項11または12に記載の行動予測方法。
【請求項14】
自車両の周辺に存在する移動体の行動の予測に基づいてドライバに対する運転支援を行う運転支援装置であって、
請求項1〜10のいずれか一項に記載の行動予測装置によって予測された移動体の行動に関する情報に基づき前記運転支援を行う
ことを特徴とする運転支援装置。
【請求項15】
前記運転支援の一つとして、前記予測された移動体の行動に関する情報に基づき、停止状態にある移動体が停止状態を継続するときの静止障害物に対する対応制御、及び停止状態にある移動体が停止状態から移動状態に推移するときの可動障害物に対する対応制御、のいずれか一方を選択的に実行する
請求項14に記載の運転支援装置。
【図1】


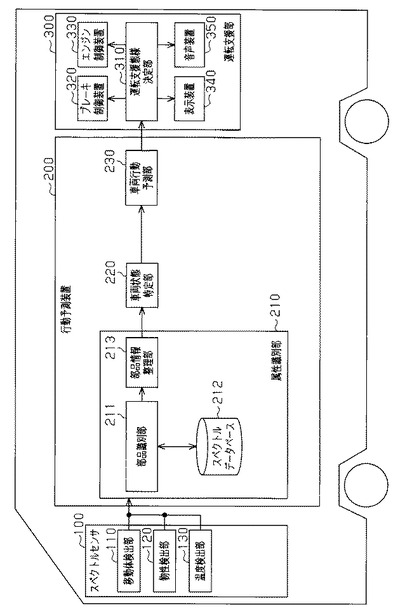
【図2】
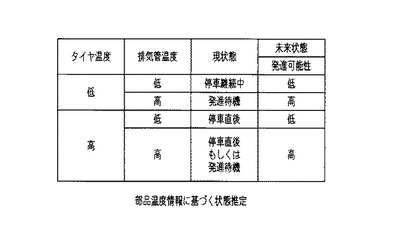
【図3】
【図4】
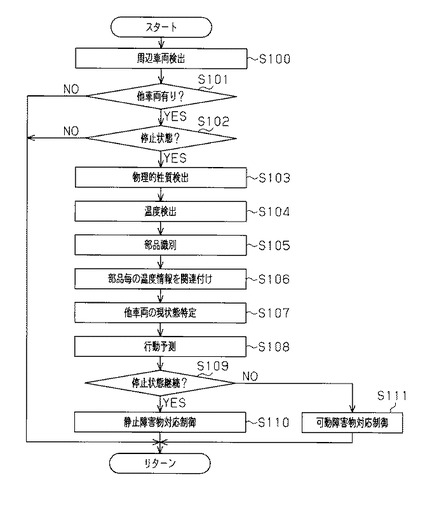
【図5】
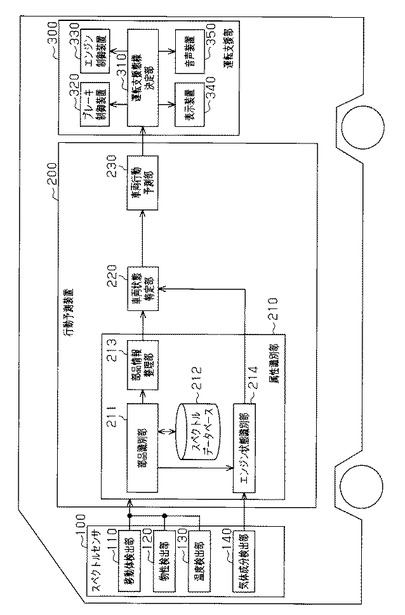
【図6】
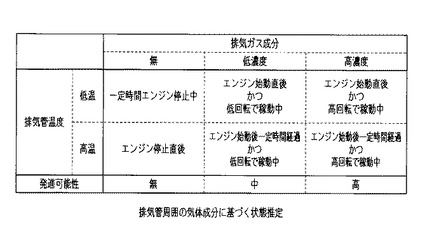
【図7】
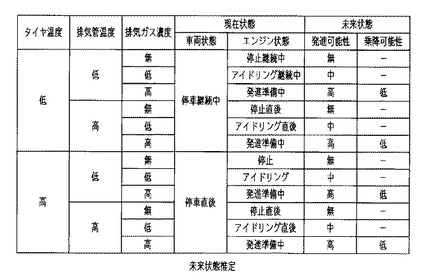
【図8】
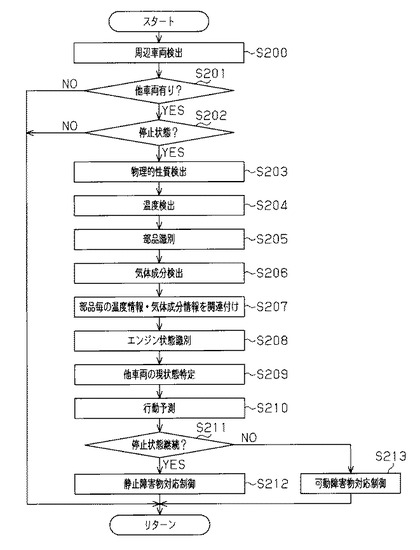
【図9】
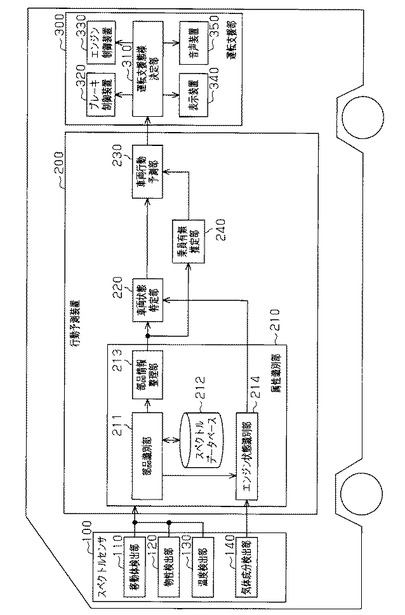
【図10】
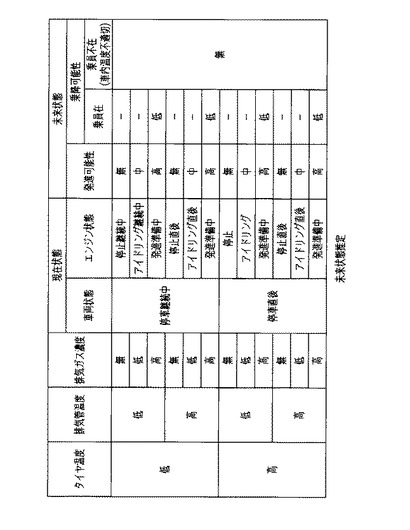
【図11】
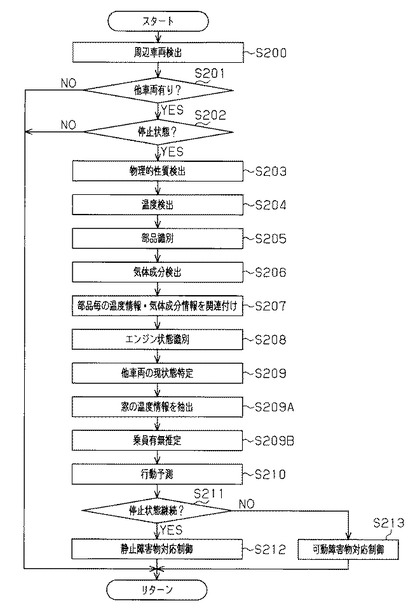
【図12】
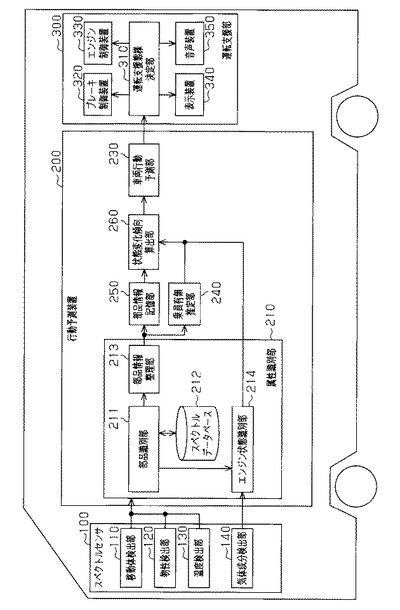
【図13】
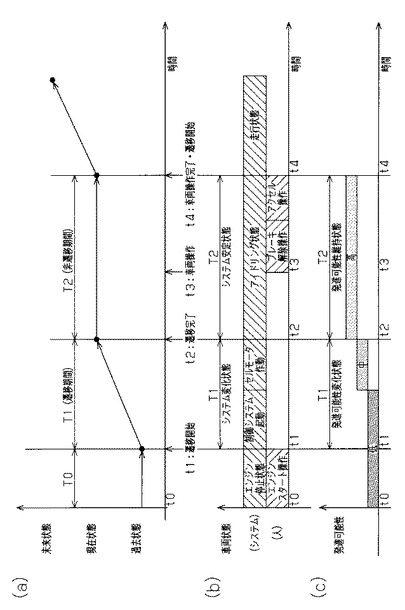
【図14】
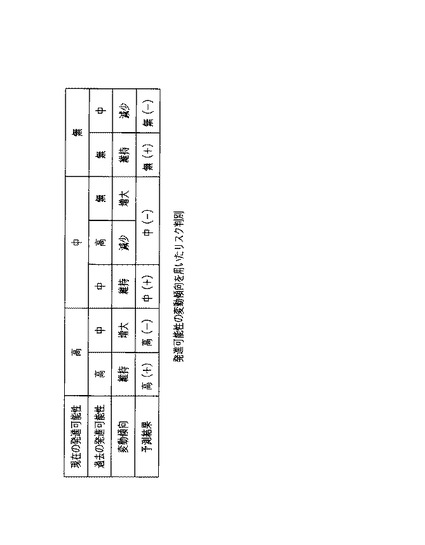
【図15】
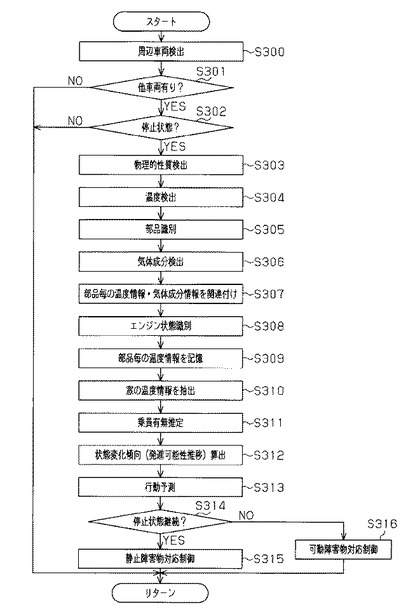
【図16】
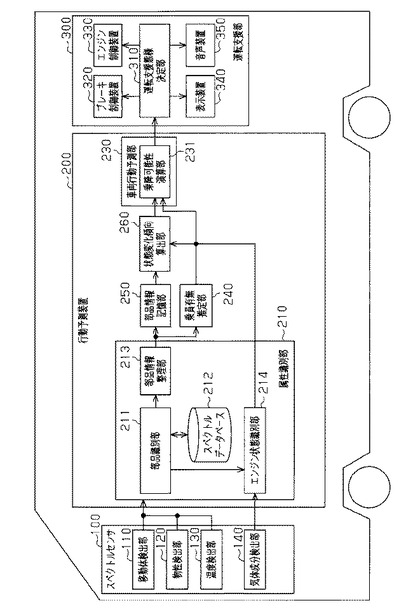
【図17】
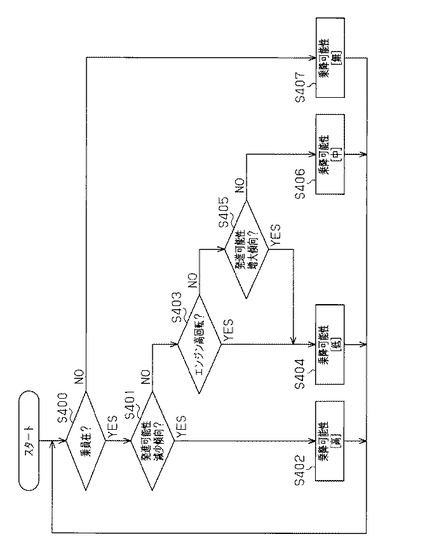
【図18】
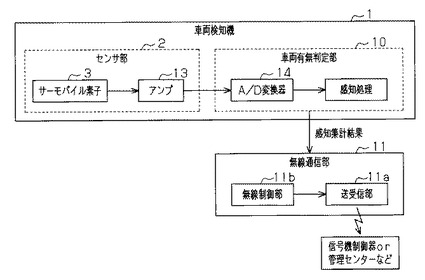
【図19】
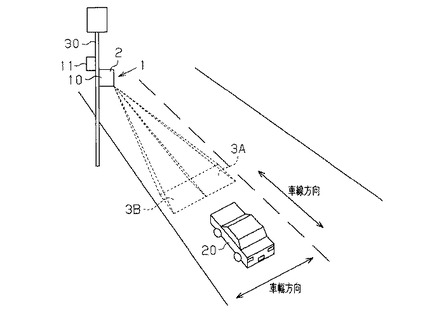
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【公開番号】特開2012−33075(P2012−33075A)
【公開日】平成24年2月16日(2012.2.16)
【国際特許分類】
【出願番号】特願2010−173152(P2010−173152)
【出願日】平成22年7月30日(2010.7.30)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
【公開日】平成24年2月16日(2012.2.16)
【国際特許分類】
【出願日】平成22年7月30日(2010.7.30)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
[ Back to top ]