
行動認識プログラム、行動認識用の端末および行動認識用の処理装置

【課題】人間の動作の判別ミスを低減し易くしつつ人間の動作の連続性から判別可能な行動を認識すること。
【解決手段】コンピュータ(2)を、加速度センサ(4a)で検出される加速度と姿勢とを対応づける情報が記憶された姿勢情報記憶手段(C4A)、加速度と前記情報とに基づいて動作を判別する動作判別手段(C7)、動作の推移を記憶する動作推移記憶手段(C8)、動作の推移と行動とを対応づける情報が記憶された行動情報記憶手段(C9)、動作の推移と前記情報とに基づいて行動を判別する行動判別手段(C10)として機能させるための行動認識プログラム(AP1)。
【解決手段】コンピュータ(2)を、加速度センサ(4a)で検出される加速度と姿勢とを対応づける情報が記憶された姿勢情報記憶手段(C4A)、加速度と前記情報とに基づいて動作を判別する動作判別手段(C7)、動作の推移を記憶する動作推移記憶手段(C8)、動作の推移と行動とを対応づける情報が記憶された行動情報記憶手段(C9)、動作の推移と前記情報とに基づいて行動を判別する行動判別手段(C10)として機能させるための行動認識プログラム(AP1)。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、人間の行動を認識するための行動認識プログラム、行動認識用の端末および行動認識用の処理装置に関する。
【背景技術】
【0002】
従来より、コンピュータ等によって人間の動作を自動的に判別する技術として、例えば、以下の特許文献1〜3の技術が公知である。
【0003】
特許文献1としての特開2009−37434号公報や、特許文献2としての特開2009−211563号公報には、2台のカメラによってユーザをステレオ視し、ユーザの肌色部分として抽出された顔領域および手先領域の3次元位置を追跡することにより、上下左右への手振り動作を判別したり、テレビ等に視線と指とを向ける指差し動作を判別したりする技術が記載されている。
また、特許文献3としての特開2008−102781号公報には、2台のカメラによってユーザをステレオ視し、ユーザの肌色部分として抽出された手先領域の3次元位置の変化に基づいて、ユーザの手の動きの大きさや速度を計算する技術が記載されている。また、特許文献3には、ユーザの顔領域も抽出し、ファジー推論によって、抽出された顔と手との位置関係と計算された手の動きの大きさと速度とから、ユーザが健常者であるか白杖者(視覚障害者)であるかを判別する技術が記載されている。
すなわち、特許文献1〜3には、カメラを用いて人間の動作を自動的に判別する技術が記載されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2009−37434号公報(「0030」〜「0053」、図1〜図6)
【特許文献2】特開2009−211563号公報(「0025」〜「0036」、図1〜図6)
【特許文献3】特開2008−102781号公報(「0013」〜「0065」、図1〜図12)
【発明の概要】
【発明が解決しようとする課題】
【0005】
(従来技術の問題点)
特許文献1〜3に記載の技術では、両方のカメラの撮像範囲内に、撮像対象(ユーザの顔や手)が存在する必要があり、撮像対象がいずれか1つのカメラの撮像範囲外、すなわち、死角に移動してしまった場合、撮像対象の3次元位置が計算できないため、ユーザの動作が判別できなくなるという問題がある。また、例えば、ユーザがカメラに背を向けたり、屈み込んだりした場合、撮像対象の全部または一部が隠れて撮像し難くなる。よって、特許文献1〜3に記載の技術では、ユーザの身体の向きや姿勢によってユーザの動作が判別し難くなるという問題があった。また、例えば、朝、昼、夜の室内の明るさが異なる場合、撮像対象の追跡精度が低下したり、追跡できなくなったりする可能性がある。特に、室内の照明を暗くした場合には、追跡できなくなるという問題があった。
この結果、特許文献1〜3に記載の技術では、ユーザの動作を判別できなくなる場合があり、判別できた場合であっても判別結果の精度が低下するおそれがあった。また、特許文献1〜3に記載の技術では、昼夜の明るさが大きく変化する室外ではユーザの動作を判別し続けることが困難であるという問題があった。
【0006】
また、近年、核家族化が進み、独り住まいの高齢者が増加したため、高齢者の転倒等の事故や体調不良等の確認を遠隔地から行いたいとの社会的要求が大きくなってきている。しかしながら、特許文献1〜3に記載の技術では、判別対象のユーザの動作は、対応する家電機器等の操作を実行するためのジェスチャ(手振り、指差し等)等の一時的な姿勢の判別だけで、転倒や起床せずに寝たまま等の異常・緊急性を要し、訪問・確認や早期救急救助が必要な行動の判別は実現できていないという問題があった。
【0007】
前述の事情に鑑み、本発明は、人間の動作の判別ミスを低減し易くしつつ人間の動作の連続性から判別可能な行動を認識することを技術的課題とする。
【課題を解決するための手段】
【0008】
前記技術的課題を解決するために、請求項1に記載の発明の行動認識プログラムは、
コンピュータを、
人が携帯可能な端末に設けられて加速度を検出可能な加速度センサで検出される加速度と、前記端末を携帯した人の姿勢と、を対応づける情報が予め記憶された姿勢情報記憶手段、
前記加速度センサで検出された加速度と、前記姿勢情報記憶手段に記憶された情報とに基づいて、前記端末を携帯した人の動作を判別する動作判別手段、
前記動作の推移を記憶する動作推移記憶手段、
前記動作の推移と、前記端末を携帯した人の行動と、を対応づける情報が予め記憶された行動情報記憶手段、
前記動作の推移と前記行動情報記憶手段に記憶された情報とに基づいて、前記端末を携帯した人の行動を判別する行動判別手段、
として機能させる。
【0009】
請求項2に記載の発明は、請求項1に記載の行動認識プログラムにおいて、
前記動作判別手段は、直交する3軸のそれぞれの方向の加速度を検出する前記加速度センサで検出された加速度に基づいて、前記端末を携帯した人の姿勢を判別すると共に、加速度ベクトルの分散に基づいて、前記端末を携帯した人の静止および移動のいずれかを判別し、且つ、前記加速度センサで検出された加速度ベクトルの最大値と最小値との差分に基づいて、前記端末を携帯した人の動作の激しさを判別し、前記姿勢と、静止または移動と、動作の激しさと、に基づいて、前記端末を携帯した人の動作を判別する、
ことを特徴とする。
【0010】
請求項3に記載の発明は、請求項1または2に記載の行動認識プログラムにおいて、
前記端末に設けられた送信手段から無線送信された加速度の情報を受信する受信手段、
を備えたことを特徴とする。
【0011】
請求項4に記載の発明は、請求項1ないし3のいずれかに記載の行動認識プログラムにおいて、
前記端末を識別する識別情報に基づいて、前記端末を携帯した人を特定する特定手段、
を備えたことを特徴とする。
【0012】
前記技術的課題を解決するために、請求項5に記載の発明の行動認識用の端末は、
加速度を検出可能な加速度センサを備え、人が携帯可能な行動認識用の端末であって、
前記加速度センサで検出される加速度と前記端末を携帯した人の姿勢とを対応づける情報が予め記憶された姿勢情報記憶手段と、前記加速度センサで検出された加速度と前記姿勢情報記憶手段に記憶された情報とに基づいて、前記端末を携帯した人の動作を判別する動作判別手段と、前記動作の推移を記憶する動作推移記憶手段と、前記動作の推移と前記端末を携帯した人の行動とを対応づける情報が予め記憶された行動情報記憶手段と、前記動作の推移と前記行動情報記憶手段に記憶された情報とに基づいて、前記端末を携帯した人の行動を判別する行動判別手段と、を有する行動認識用の処理装置との間で、情報の送受信が可能である
ことを特徴とする。
【0013】
前記技術的課題を解決するために、請求項6に記載の発明の行動認識用の処理装置は、
加速度を検出可能な加速度センサを備え、人が携帯可能な端末との間で情報の送受信が可能な行動認識用の処理装置であって、
前記加速度センサで検出される加速度と前記端末を携帯した人の姿勢とを対応づける情報が予め記憶された姿勢情報記憶手段と、
前記加速度センサで検出された加速度と前記姿勢情報記憶手段に記憶された情報とに基づいて、前記端末を携帯した人の動作を判別する動作判別手段と、
前記動作の推移を記憶する動作推移記憶手段と、前記動作の推移と前記端末を携帯した人の行動とを対応づける情報が予め記憶された行動情報記憶手段と、
前記動作の推移と前記行動情報記憶手段に記憶された情報とに基づいて、前記端末を携帯した人の行動を判別する行動判別手段と、
を備えたことを特徴とする。
【0014】
なお、前記技術的課題を解決するための行動認識方法として、
人が携帯可能な端末に設けられて加速度を検出可能な加速度センサで検出される加速度と、前記加速度と前記端末を携帯した人の姿勢とが予め対応づけられた情報とに基づいて、前記端末を携帯した人の動作を判別する動作判別ステップと、
前記動作の推移と、前記動作の推移と前記端末を携帯した人の行動とが予め対応づけられた情報と、に基づいて、前記端末を携帯した人の行動を判別する行動判別ステップと、
を実行することも可能である。
【発明の効果】
【0015】
請求項1に記載の発明によれば、加速度センサで検出された加速度に基づいて端末を携帯した人の行動を判別する構成を有しない場合に比べ、人間の動作の判別ミスを低減しつつ人間の動作の連続性から判別可能な行動を認識することができる。
【0016】
請求項2に記載の発明によれば、加速度センサで検出された加速度に基づく姿勢と、加速度ベクトルの分散に基づく静止または移動と、加速度ベクトルの最大値と最小値との差分に基づく動作の激しさとに基づいて、端末を携帯した人の動作を判別できる。
請求項3に記載の発明によれば、端末から無線送信された加速度の情報に基づいて、端末を携帯した人の動作や行動を判別できる。
請求項4に記載の発明によれば、端末を携帯した人が複数存在する場合に、識別情報に基づいて、動作した人を特定することができる。
【0017】
請求項5、6に記載の発明によれば、行動認識用の端末の加速度センサで検出された加速度に基づいて行動認識用の処理装置で行動認識用の端末を携帯した人の行動を判別する構成を有しない場合に比べ、人間の動作の判別ミスを低減しつつ人間の動作の連続性から判別可能な行動を認識することができる。
【図面の簡単な説明】
【0018】
【図1】図1は実施例1の行動認識システムの全体説明図である。
【図2】図2は実施例1の行動認識システムのサーバとアクセスポイントとセンサタグとの各制御部が備えている各機能をブロック図(機能ブロック図)で示した図である。
【図3】図3は実施例1のメンバシップ関数の一例の説明図であって、センサタグを腰の位置に装着した対象者のメンバシップ関数の説明図であり、図3Aは縦軸をメンバシップ値とし横軸をX軸加速度とした場合の立位・座位・臥位の各メンバシップ関数の説明図、図3Bは縦軸をメンバシップ値とし横軸をY軸加速度とした場合の臥位(左向き)・臥位(右向き)・臥位(左右の向きなし)の各メンバシップ関数の説明図、図3Cは縦軸をメンバシップ値とし横軸をZ軸加速度とした場合の臥位(うつ伏せ)・臥位(仰向け)・臥位(前後の向きなし)の各メンバシップ関数の説明図、図3Dは縦軸をメンバシップ値とし横軸を加速度ベクトルの分散とした場合の静止・移動の各メンバシップ関数の説明図、図3Eは縦軸をメンバシップ値とし横軸を加速度ベクトルの最小値と最大値との差分とした場合の歩行・走行の各メンバシップ関数の説明図である。
【図4】図4は実施例1のメンバシップ関数を設定する際に対象者から取得した各動作の加速度データと連続画像と時系列で照合する作業に関する一例の説明図であり、対象者が前方に転倒した際の各動作の画像と縦軸を加速度とし横軸を時間とした場合の3軸の加速度データとを照合する作業の概念説明図である。
【図5】図5は縦軸を加速度とし横軸を時間とした場合の3軸の加速度データの説明図であり、図5Aは対象者が左向き・うつ伏せ・左向き・仰向けの順に寝返りした際の加速度データの一例の説明図、図5Bは対象者が仰向けの状態から膝を立てて床を肘や手で支えながら上体を起こして離床した際の加速度データの一例の説明図である。
【図6】図6は実施例1の行動表示画像の説明図である。
【図7】図7は実施例1の動作推移記憶処理のフローチャートである。
【図8】図8は実施例1の動作判別処理のフローチャートであり、図7のST105のサブルーチンの説明図である。
【図9】図9は実施例1の行動認識処理のフローチャートである。
【図10】図10は実施例1の行動判別処理のフローチャートであり、図9のST202のサブルーチンの説明図である。
【図11】図11は実施例1の図1に対応する説明図であって実施例2の行動認識システムの全体説明図である。
【図12】図12は実施例1の図2に対応する説明図であって実施例2の行動認識システムのサーバと携帯端末との各制御部が備えている各機能をブロック図(機能ブロック図)で示した図である。
【図13】図13は実施例1の図7に対応する説明図であって実施例2の動作推移記憶処理のフローチャートである。
【発明を実施するための形態】
【0019】
次に図面を参照しながら、本発明の実施の形態の具体例(以下、実施例と記載する)を説明するが、本発明は以下の実施例に限定されるものではない。
【実施例1】
【0020】
図1は実施例1の行動認識システムの全体説明図である。
図1において、実施例1の行動認識システム1は、行動認識用の処理装置の一例としてのサーバ2を有する。実施例1の前記サーバ2は、コンピュータ装置により構成されており、コンピュータ本体2aと、ディスプレイ2bと、キーボード2cやマウス2d等の入力装置、図示しないハードディスクドライブ等により構成されている。
【0021】
また、前記行動認識システム1は、行動認識の対象者(端末を携帯した人、例えば、老人ホームの老人や病院の患者等)が居住する室内(例えば、老人ホームの各部屋)に配置されたアクセスポイント(転送部材、端末位置検出部材)3,3と、前記対象者が携帯するセンサタグ(端末、行動認識用の端末)4,4とを有する。実施例1では、前記アクセスポイント3,3は、第1の情報通信回線の一例としての無線LAN(Local Area Network)5を介して、前記サーバ2に接続されており、前記センサタグ4,4は、第2の情報通信回線の一例としてのZigBee(登録商標)ネットワーク6を介して、前記アクセスポイント3,3と接続されている。
ここで、ZigBee(登録商標)とは、センサネットワークとして利用することを想定して開発された家電向けの短距離無線通信規格の一つであり、低速で情報の送受信の範囲が狭い替わりに、他の無線通信規格の端末に比べて安価で消費電力が少ないという特徴を有している。
【0022】
実施例1の前記アクセスポイント3,3は、センサタグ4,4からの受信可能な範囲が半径約30[m]に予め設定されている。また、実施例1では、各部屋の広さは、縦の長さが約8[m]、横の長さが約6[m]に予め設定されている。よって、前記センサタグ4,4は、室内の全ての位置から前記アクセスポイント3,3に情報が送信可能となっており、実施例1のアクセスポイント3,3は各部屋の一角に1台ずつ配置されている。
また、実施例1の前記センサタグ4,4は、一例として、図示しないフックでベルトのバックル部分に引っ掛ける等して各対象者の腰の位置に装着されており、直交する3軸のそれぞれの方向の加速度を検出する加速度センサ(3軸加速度センサ)4a,4aを有する。
【0023】
実施例1の加速度センサ4a,4aは、50[ms]ごとに対象者についてのX軸方向(上下方向)、Y軸方向(左右方向)、Z軸方向(前後方向)の各加速度(X軸加速度ax、Y軸加速度ay,Z軸加速度az)を、−2.0625[G:9.80665m/s2]から+2.0625[G]までの値で検出する。すなわち、−2.0625≦ax≦+2.0625,−2.0625≦ay≦+2.0625,−2.0625≦az≦+2.0625が成立する。なお、実施例1では、X軸方向については、上方向がプラス方向(+)、下方向がマイナス方向(−)に予め設定されている。また、Y軸方向については、右方向がプラス方向、左方向がマイナス方向に予め設定されている。また、Z軸方向については、前方向がプラス方向、後方向がマイナス方向に予め設定されている。
よって、例えば、対象者が静止している場合、1[G]の重力加速度が下向きに働くため、直立していれば、ax=−1[G]、ay=az=0[G]となる加速度ax〜azが検出される。また、例えば、対象者が左向きで寝ている状態で静止していれば、ay=−1[G]、az=ax=0[G]となる加速度ax〜azが検出され、対象者がうつ伏せで寝ている状態で静止していれば、az=+1[G]、ax=ay=0[G]となる加速度ax〜azが検出される。
【0024】
(実施例1の制御部の説明)
(実施例1のセンサタグ4,4の制御部の説明)
図2は実施例1の行動認識システムのサーバとアクセスポイントとセンサタグとの各制御部が備えている各機能をブロック図(機能ブロック図)で示した図である。
図2において、前記センサタグ4,4の制御部は、外部との信号の入出力等を行う入出力インターフェース(I/O)、必要な処理を行うためのプログラムおよび情報等が記憶されたROM(リードオンリーメモリ)、必要なデータを一時的に記憶するためのRAM(ランダムアクセスメモリ)、前記ROMに記憶されたプログラムに応じた処理を行うCPU(中央演算処理装置)、ならびに発振器等を有する小型情報処理装置、いわゆる、マイクロコンピュータにより構成されており、前記ROMに記憶されたプログラムを実行することにより種々の機能を実現することができる。
【0025】
(実施例1のセンサタグ4,4の制御部に接続された信号出力要素)
前記センサタグ4,4の制御部は、加速度センサ4a,4a等の信号出力要素からの出力信号が入力されている。前記加速度センサ4a,4aは、50[ms]ごとに3軸の各方向の加速度ax〜azを検出する。
(実施例1のセンサタグ4,4の制御部の機能)
前記センサタグ4,4の制御部は、前記信号出力要素からの入力信号に応じた処理を実行する以下の機能を有している。
CS1:端末情報記憶手段(識別情報記憶手段、センサタグID記憶手段、端末識別情報記憶手段)
端末情報記憶手段CS1は、センサタグ4,4ごとに予め設定されたセンサタグID(識別情報、端末情報、端末識別情報)を記憶する。
CS2:送信手段
送信手段CS2は、前記端末情報記憶手段CS1に記憶されたセンサタグIDを送信する端末情報送信手段CS2Aを有し、加速度センサ4a,4aによって検出された加速度ax〜azの情報である加速度データ(加速度の情報)を送信する。実施例1の前記送信手段CS2は、いわゆる、ZigBee(登録商標)モジュール(ZigBee(登録商標)チップ、ZigBee(登録商標)送受信機)によって構成された図示しない送信部を介して、検出された加速度データと、記憶されたセンサタグIDと含む情報を50[ms]ごとにアクセスポイント3,3に送信(無線送信)する。
【0026】
(実施例1のアクセスポイント3,3の制御部の説明)
(実施例1のアクセスポイント3,3の制御部の機能)
また、前記アクセスポイント3,3の制御部は、前記センサタグ4,4の制御部と同様のマイクロコンピュータにより構成されており、以下の機能を有している。
CA1:転送情報記憶手段(アクセスポイントID記憶手段、転送部材識別情報記憶手段)
転送情報記憶手段CA1は、アクセスポイント3,3ごとに予め設定されたアクセスポイントID(転送情報、転送部材識別情報)を記憶する。
【0027】
CA2:転送手段
転送手段CA2は、転送用受信手段CA2Aと、信号強度検出手段CA2Bと、転送用送信手段CA2Cとを有し、前記送信手段CS2によって送信された情報をサーバ2に転送する。
CA2A:転送用受信手段
転送用受信手段CA2Aは、前記ZigBee(登録商標)モジュールによって構成された図示しない受信部を介して、前記送信手段CS2によって送信された加速度データとセンサタグIDとを含む情報を受信する。
【0028】
CA2B:信号強度検出手段
信号強度検出手段C2A2Bは、前記転送用受信手段CA2Aによって受信した情報の受信信号の強度である受信信号強度(RSSI:Received Signal Strength Indicator)の値であるRSSI値を検出する。実施例1の前記信号強度検出手段CA2Bは、受信信号のRSSI値を、−128[dBm:デービーエム]から+128[dBm]までの値で検出する。なお、「dBm」とは、基準値である1[mW]に対する受信信号の電力のレベル表現の値(比の常用対数の10倍)のことをいう。例えば、1[mW]は、10×log10((1×10−3)/(1×10−3))=0[dBm]、30[mW]は、10×log10((30×10−3)/(1×10−3))≒14.8[dBm]、0.1[mW]は、10×log10((0.1×10−3)/(1×10−3))=−10[dBm]となる。
CA2C:転送用送信手段
転送用送信手段CA2Cは、前記転送情報記憶手段CA1に記憶されたアクセスポイントIDと前記信号強度検出手段CA2Bによって検出されたRSSI値とを送信する端末位置送信手段CA2C1を有し、いわゆる、無線LANモジュール(無線LAN送受信機)によって構成された図示しない送信部を介して、前記転送用受信手段CA2Aによって受信した前記情報とアクセスポイントIDとRSSI値とを含む情報をサーバ2に送信する。
【0029】
(実施例1のサーバ2の制御部の説明)
また、前記サーバ2のコンピュータ本体2aの制御部は、I/O、ROM、RAM、CPU、クロック発振器等を有し、前記構成のサーバ2は、ハードディスクドライブやROM等に記憶されたプログラムを実行することにより種々の機能を実現することができる。
前記制御部には、基本動作を制御する基本ソフト、いわゆる、オペレーティングシステムOS、アプリケーションプログラムとしての行動認識プログラムAP1、その他の図示しないソフトウェアが記憶されている。
【0030】
(実施例1の行動認識プログラムAP1の説明)
前記行動認識プログラムAP1は、下記の機能手段(プログラムモジュール)を有する。
C1:特定手段(端末情報特定手段、センサタグID特定手段、端末識別情報特定手段)
特定手段C1は、センサタグIDに基づいて、センサタグ4,4を携帯した対象者を特定する。
【0031】
C2:受信手段
受信手段C2は、前記端末情報送信手段CS2Aから送信されたセンサタグIDを受信する端末情報受信手段C2Aと、前記端末位置送信手段CA2C1から送信されたアクセスポイントIDとRSSI値とを受信する端末位置受信手段C2Bとを有し、前記送信手段CS2から送信された加速度データを受信する。実施例1の前記受信手段C2は、前記転送用送信手段CA2Cから転送された前記情報(加速度データ、センサタグID、アクセスポイントID、RSSI値を含む情報)を受信する。
C3:受信情報記憶手段
受信情報記憶手段C3は、前記受信手段C2から前記情報を受信した時期(タイムスタンプ)を記憶する受信時期記憶手段(タイムスタンプ記憶手段)C3Aを有し、前記受信手段C2によって受信した前記情報と時期とを対応付けて記憶する。すなわち、実施例1の前記受信情報記憶手段C3には、受信した時期ごとに、加速度データ、センサタグID、アクセスポイントID、RSSI値が対応付けられて記憶される。
【0032】
図3は実施例1のメンバシップ関数の一例の説明図であって、センサタグを腰の位置に装着した対象者のメンバシップ関数の説明図であり、図3Aは縦軸をメンバシップ値とし横軸をX軸加速度とした場合の立位・座位・臥位の各メンバシップ関数の説明図、図3Bは縦軸をメンバシップ値とし横軸をY軸加速度とした場合の臥位(左向き)・臥位(右向き)・臥位(左右の向きなし)の各メンバシップ関数の説明図、図3Cは縦軸をメンバシップ値とし横軸をZ軸加速度とした場合の臥位(うつ伏せ)・臥位(仰向け)・臥位(前後の向きなし)の各メンバシップ関数の説明図、図3Dは縦軸をメンバシップ値とし横軸を加速度ベクトルの分散とした場合の静止・移動の各メンバシップ関数の説明図、図3Eは縦軸をメンバシップ値とし横軸を加速度ベクトルの最大値と最小値との差分とした場合の歩行・走行の各メンバシップ関数の説明図である。
図4は実施例1のメンバシップ関数を設定する際に対象者から取得した各動作の加速度データと連続画像と時系列で照合する作業に関する説明図であり、対象者が前方に転倒した際の各動作の画像と縦軸を加速度とし横軸を時間とした場合の3軸の加速度データとを照合する作業の概念説明図である。
【0033】
C4:動作情報記憶手段
動作情報記憶手段C4は、姿勢情報記憶手段C4Aと、静動情報記憶手段C4Bと、強弱情報記憶手段C4Cとを有し、前記受信情報記憶手段C3に記憶された加速度データと、対象者の動作とを対応づける情報としての動作情報を記憶する。実施例1の前記動作情報記憶手段C4は、前記動作情報として、図3に示す、ファジィ推論(Fuzzy Inference)に用いるメンバシップ関数(Membership function)(f1〜f13)を記憶する。具体的には、各加速度ax〜azから後述する各メンバシップ値(STAND,SIT,LIE,LIE_LEFT,LIE_RIGHT,NOT_LIE_LR,LIE_FRONT,LIE_BACK,NOT_LIE_FB,STOP,MOVE,WALK,RUN)を演算するための情報(例えば、メンバシップ関数の定数や、メンバシップ値設定テーブル等)をセンサタグIDと対応付けて記憶する。
すなわち、実施例1の前記動作情報記憶手段C4は、センサタグIDに応じて、対象者ごとに各メンバシップ関数(f1〜f13)を記憶する。
【0034】
なお、ファジィ推論やメンバシップ関数に関する詳細な説明については、例えば、特許文献3等に記載されており、公知であるため、詳細な説明については省略する。
また、図3に示す実施例1の各メンバシップ関数(f1〜f13)は、図4に示すように、センサタグ4を装着した対象者をカメラで撮影しながら、対象者に判別対象の各動作を21回ずつ予め実行してもらい、取得した「立位」、「座位」、前後左右に向いた「臥位」、「歩行」、「走行」の8種類の各動作の21個のサンプルについて、それぞれ加速度データと動画とを時系列で照合することによって予め設定されている。
【0035】
C4A:姿勢情報記憶手段
姿勢情報記憶手段C4Aは、前記受信情報記憶手段C3に記憶された加速度データと、対象者の姿勢とを対応づける情報としての姿勢情報を記憶する。実施例1では、対象者の姿勢の一例として、立っている状態である「立位」、座っている状態である「座位」、寝ている状態である「臥位」が予め設定されている。ここで、静止している場合の「立位」、「座位」、「臥位」については、X軸加速度axに基づいて判別可能である。例えば、「立位」ならばax≒−1[G]となり、「臥位」ならばax≒0[G]となり、「座位」ならば上体が前か後に傾いた状態になり易く、上体の傾きによってX軸加速度axが−1[G]から0[G]までの間の値が検出される。よって、図3Aに示すように、X軸加速度axに基づいて、X軸加速度axと「立位」、「座位」、「臥位」の各メンバシップ値(確率変数)STAND,SIT,LIE(0≦STAND≦1,0≦SIT≦1,0≦LIE≦1)とを対応づける「立位」、「座位」、「臥位」の各メンバシップ関数f1,f2,f3を設定できる。
【0036】
具体的には、図3Aに示すように、「立位」のメンバシップ関数f1の一例として、ax≦−0.8の場合にSTAND=1となり、−0.8<ax<−0.6の場合にSTAND=−5(ax)−3となり、−0.6≦axの場合にSTAND=0となる関数が設定できる。また、「座位」のメンバシップ関数f2の一例として、ax≦−0.8の場合にSIT=0となり、−0.8<ax<−0.6の場合にSIT=5(ax)+4となり、−0.6≦ax≦−0.4の場合にSIT=1となり、−0.4<ax<−0.2の場合にSIT=−5(ax)−1となり、−0.2≦axの場合にSIT=0となる関数が設定できる。また、「臥位」のメンバシップ関数f3の一例として、ax≦−0.4の場合にLIE=0となり、−0.4<ax<−0.2の場合にLIE=5(ax)+2となり、−0.2≦axの場合にLIE=1となる関数が設定できる。
よって、X軸加速度axに応じた各メンバシップ値STAND〜LIEの和(STAND+SIT+LIE)が1に設定されている(f1(ax)+f2(ax)+f3(ax)=1)。また、ax≦−0.8,−0.6<ax≦−0.4,−0.2≦axで各メンバシップ値STAND,SIT,LIEがそれぞれ1に設定され、−0.8<ax<−0.6が各メンバシップ値STAND,SITの0から1への境界部に設定され、−0.4<ax<−0.2が各メンバシップ値SIT,LIEの0から1への境界部に設定されている。
【0037】
また、実施例1では、静止している場合の「臥位」の前後左右の向きについては、Y軸加速度ay,azに基づいて判別可能である。例えば、左向きならばay≒−1[G]となり、右向きならばay≒+1[G]となり、前向き、すなわち、うつ伏せならばaz≒+1[G]となり、後向き、すなわち、仰向けならばaz≒−1[G]が検出される。よって、図3Bに示すように、Y軸加速度ayに基づいて、Y軸加速度ayと「臥位(左向き)」、「臥位(右向き)」、「臥位(左右の向きなし)」の各メンバシップ値LIE_LEFT,LIE_RIGHT,NOT_LIE_LR(0≦LIE_LEFT≦1,0≦LIE_RIGHT≦1,0≦NOT_LIE_LR≦1)とを対応づける「臥位(左向き)」、「臥位(右向き)」、「臥位(左右の向きなし)」の各メンバシップ関数f4,f5,f6を設定できる。また、図3Cに示すように、Z軸加速度azに基づいて、Z軸加速度azと「臥位(うつ伏せ)」、「臥位(仰向け)」、「臥位(前後の向きなし)」の各メンバシップ値LIE_FRONT,LIE_BACK,NOT_LIE_FB(0≦LIE_FRONT≦1,0≦LIE_BACK≦1,0≦NOT_LIE_FB≦1)とを対応づける「臥位(うつ伏せ)」、「臥位(仰向け)」、「臥位(前後の向きなし)」の各メンバシップ関数f7,f8,f9を設定できる。
【0038】
具体的には、図3Bに示すように、「臥位(左向き)」のメンバシップ関数f4の一例としてay≦−0.6の場合にLIE_LEFT=1となり、−0.6<ay<−0.4の場合にLIE_LEFT=−5(ay)−2となり、−0.4≦ayの場合にLIE_LEFT=0となる関数が設定できる。また、「臥位(右向き)」のメンバシップ関数f5の一例として、ay≦0.4の場合にLIE_RIGHT=0となり、0.4<ay<0.6の場合にLIE_RIGHT=5(ay)−2となり、0.6≦ayの場合にLIE_RIGHT=1となる関数が設定できる。また、「臥位(左右の向きなし)」のメンバシップ関数f6の一例として、ay≦−0.6の場合にNOT_LIE_LR=0となり、−0.6<ay<−0.4の場合にNOT_LIE_LR=5(ay)+3となり、−0.4≦ay≦0.4の場合にNOT_LIE_LR=1となり、0.4<ay<0.6の場合にNOT_LIE_LR=−5(ay)+3となり、0.6≦ayの場合にNOT_LIE_LR=0となる関数が設定できる。
よって、Y軸加速度ayに応じた各メンバシップ値LIE_LEFT〜NOT_LIE_LRの和(LIE_LEFT+LIE_RIGHT+NOT_LIE_LR)が1に設定されている(f4(ay)+f5(ay)+f6(ay)=1)。また、ay≦−0.6,−0.4≦ay≦0.4,0.6≦ayで各メンバシップ値LIE_LEFT,NOT_LIE_LR,LIE_RIGHTがそれぞれ1に設定され、−0.6<ay<−0.4が各メンバシップ値LIE_LEFT,NOT_LIE_LRの0から1への境界部に設定され、0.4<ay<0.6が各メンバシップ値NOT_LIE_LR,LIE_RIGHTの0から1への境界部に設定されている。
【0039】
また、図3Cに示すように、「臥位(うつ伏せ)」のメンバシップ関数f7の一例として、az≦0.6の場合にLIE_FRONT=0となり、0.6<az<0.8の場合にLIE_FRONT=5(az)−3となり、0.8≦azの場合にLIE_FRONT=1となる関数が設定できる。また、「臥位(仰向け)」のメンバシップ関数f8の一例として、az≦−0.8の場合にLIE_BACK=1となり、−0.8<az<−0.6の場合にLIE_BACK=−5(az)−3となり、−0.6≦azの場合にLIE_BACK=0となる関数が設定できる。また、「臥位(前後の向きなし)」のメンバシップ関数f9の一例として、az≦−0.8の場合にNOT_LIE_FB=0となり、−0.8<az<−0.6の場合にNOT_LIE_FB=5(az)+4となり、−0.6≦az≦0.6の場合にNOT_LIE_FB=1となり、0.6<az<0.8の場合にNOT_LIE_FB=−5(az)+4となり、0.8≦azの場合にNOT_LIE_FB=0となる関数が設定できる。
【0040】
よって、Z軸加速度azに応じた各メンバシップ値LIE_FRONT〜NOT_LIE_LRの和(LIE_FRONT+LIE_BACK+NOT_LIE_FB)が1となるように設定されている(f7(az)+f8(az)+f9(az)=1)。また、az≦−0.8,−0.6≦az≦0.6,0.8≦azで各メンバシップ値LIE_BACK,NOT_LIE_FB,LIE_FRONTがそれぞれ1に設定され、−0.8<az<−0.6が各メンバシップ値LIE_BACK,NOT_LIE_FBの0から1への境界部に設定され、0.6<az<0.8が各メンバシップ値NOT_LIE_FB,LIE_FRONTの0から1への境界部に設定されている。
なお、実施例1では、各加速度ax〜azに応じて出力される各メンバシップ値STAND〜NOT_LIE_FBの和(STAND+SIT+LIE),(LIE_LEFT+LIE_RIGHT+NOT_LIE_LR),(LIE_FRONT+LIE_BACK+NOT_LIE_FB)が1となる各メンバシップ関数f1〜f9を設定したが、これに限定されず、例えば、和(STAND+SIT+LIE),(LIE_LEFT+LIE_RIGHT+NOT_LIE_LR),(LIE_FRONT+LIE_BACK+NOT_LIE_FB)が1より小さい値となるメンバシップ関数を設定することも可能である。
【0041】
よって、実施例1の前記姿勢情報記憶手段C4Aは、「立位」のメンバシップ関数f1(図3Aの実線参照)と、「座位」のメンバシップ関数f2(図3Aの1点鎖線参照)と、「臥位」のメンバシップ関数f3(図3Aの2点鎖線参照)とをセンサタグIDと対応付けて記憶する。また、前記姿勢情報記憶手段C4Aは、「臥位(左向き)」のメンバシップ関数f4(図3Bの実線参照)と、「臥位(右向き)」のメンバシップ関数f5(図3Bの1点鎖線参照)と、「臥位(左右の向きなし)」のメンバシップ関数f6(図3Bの2点鎖線参照)とをセンサタグIDと対応付けて記憶する。さらに、前記姿勢情報記憶手段C4Aは、「臥位(うつ伏せ)」のメンバシップ関数f7(図3Cの実線参照)と、「臥位(仰向け)」のメンバシップ関数f8(図3Cの1点鎖線参照)と、「臥位(前後の向きなし)」のメンバシップ関数f9(図3Cの2点鎖線参照)とをセンサタグIDと対応付けて記憶する。
【0042】
C4B:静動情報記憶手段
静動情報記憶手段C4Bは、前記受信情報記憶手段C3に記憶された複数の加速度データに基づく複数の加速度ベクトル(各加速度ax〜azの合成ベクトル)の分散σ2と、対象者の動作の有無、すなわち、「静止」および「移動」とを対応づける情報としての静動情報をセンサタグIDと対応付けて記憶する。ここで、「静止」、「移動」については、複数の加速度ベクトルの分散σ2に基づいて判別可能である。例えば、「静止」ならばσ2≒0となり、「移動」ならばσ2>0で変化すると考えられる。よって、図3Dに示すように、分散σ2に基づいて、分散σ2と「静止」、「移動」の各メンバシップ値STOP,MOVE(0≦STOP≦1,0≦MOVE≦1)とを対応づける「静止」、「移動」の各メンバシップ関数f10,f11を設定できる。
【0043】
具体的には、図3Dに示すように、「静止」のメンバシップ関数f10の一例として、0≦σ2≦0.004の場合にSTOP=1となり、0.004<σ2<0.006の場合にSTOP=−500(σ2)+3となり、0.006≦σ2の場合にSTOP=0となる関数が設定できる。また、「移動」のメンバシップ関数f11の一例として、0≦σ2≦0.004の場合にMOVE=0となり、0.004<ay<0.006の場合にMOVE=500(σ2)−2となり、0.006≦σ2の場合にMOVE=1となる関数が設定できる。
よって、分散σ2に応じた各メンバシップ値STOP,MOVEの和(STOP+MOVE)が1に設定されている(f10(σ2)+f11(σ2)=1)。また、0≦σ2≦0.004,0.006≦σ2で各メンバシップ値STOP,MOVEがそれぞれ1に設定され、0.004<σ2<0.006が各メンバシップ値STOP,MOVEの0から1への境界部に設定されている。
なお、実施例1では、分散σ2に応じて出力される各メンバシップ値STAND,MOVEの和(STOP+MOVE)が1となる各メンバシップ関数f10,f11を設定したが、これに限定されず、例えば、和(STOP+MOVE)が1より小さい値となるメンバシップ関数を設定することも可能である。
【0044】
よって、実施例1の前記静動情報記憶手段C4Bは、「静止」のメンバシップ関数f10(図3Dの実線参照)と、「移動」のメンバシップ関数f11(図3Dの1点鎖線参照)とをセンサタグIDと対応付けて記憶する。
なお、実施例1の前記分散σ2は、直近50個の各加速度ax〜azから得られる加速度ベクトルa1,a2,…,a50(a1=(ax1,ay1,az1),a2=(ax2,ay2,az2),…,a50=(ax50,ay50,az50))の標本分散となるように予め設定されている。すなわち、分散σ2は、50個の加速度ベクトルa1〜a50の平均ベクトルをμとし各ベクトルa1〜a50,μの転置ベクトルをa1T〜a50T,μTとした場合に、以下の式(1−1)によって演算される。
σ2=(1/50)×Σi=150(aiaiT)−μμT …式(1−1)
【0045】
具体的には、前記式(1−1)を展開した以下の式(1−2)によって、分散σ2を演算する。
σ2=+{(ax12+ay12+az12)
+…+(ax502+ay502+az502)}/50
−{(ax1+…+ax50)2
+(ay1+…+ay50)2
+(az1+…+az50)2}/502 …式(1−2)
よって、例えば、対象者が2.5秒以上仰向けで静止し(50×50=2500[ms])、az1=…=az50=−1[G],ax1=…=ax50=ay1=…=ay50=0[G]が成立する場合、σ2=50/50−502/502=0が成立する。
【0046】
C4C:強弱情報記憶手段
強弱情報記憶手段C4Cは、前記受信情報記憶手段C3に記憶された複数の加速度データに基づく複数の加速度ベクトルの長さ(大きさ)の最大値と最小値との差分Δaと、対象者の動作の激しさ(強弱)とを対応づける情報としての強弱情報を記憶する。実施例1では、対象者の動作の激しさの一例として、激しさが小さい(弱い)「弱」、激しさが大きい(強い)「強」が予め設定されている。ここで、「弱」、「強」については、複数の加速度ベクトルの最大値と最小値との差分Δaに基づいて判別可能である。例えば、「弱」の代表例として対象者が歩行している場合にはΔa≒1となり、「強」の代表例として対象者が走行している場合ならばΔa>1で変化すると考えられる。
【0047】
よって、図3Eに示すように、差分Δaに基づいて、差分Δaと「弱」、「強」の各メンバシップ値WALK,RUN(0≦WALK≦1,0≦RUN≦1)とを対応づける「弱」、「強」の各メンバシップ関数f12,f13を設定できる。
具体的には、図3Eに示すように、「弱」のメンバシップ関数f12の一例として、0≦Δa≦1.25の場合にWALK=1となり、1.25<Δa<1.75の場合にWALK=−2(Δa)+2.5となり、1.25≦Δaの場合にWALK=0となる関数が設定できる。また、「強」のメンバシップ関数f13の一例として、0≦Δa≦1.25の場合にRUN=0となり、1.25<Δa<1.75の場合にRUN=2(Δa)−2.5となり、1.75≦Δaの場合にRUN=1となる関数が設定できる。
【0048】
よって、差分Δaに応じた各メンバシップ値WALK,RUNの和(WALK+RUN)が1に設定されている(f12(Δa)+f13(Δa)=1)。また、0≦Δa≦1.25,1.75≦Δaで各メンバシップ値WALK,RUNがそれぞれ1に設定され、1.25<Δa<1.75が各メンバシップ値WALK,RUNの0から1への境界部に設定されている。
なお、実施例1では、差分Δaに応じて出力される各メンバシップ値WALK,RUNの和(WALK+RUN)が1となる各メンバシップ関数f12,f13を設定したが、これに限定されず、例えば、和(WALK+RUN)が1より小さい値となるメンバシップ関数を設定することも可能である。
【0049】
よって、実施例1の前記強弱情報記憶手段C4Cは、「弱」のメンバシップ関数f12(図3Eの実線参照)と、「強」のメンバシップ関数f13(図3Eの1点鎖線参照)とをセンサタグIDと対応付けて記憶する。
なお、実施例1の前記差分Δaは、直近17個の各加速度ax〜azから得られる加速度ベクトルa1,a2,…,a17の最大値と最小値との差分となるように予め設定されている。すなわち、差分Δaは、17個の加速度ベクトルa1〜a17の大きさ、すなわち、ユークリッド距離を|a1|〜|a17|とし(|ai|=(axi2+ayi2+azi2)1/2,i=1,2,…,17)、最大値をmax(|a1|,|a2|,…,|a17|)とし、最小値をmin(|a1|,|a2|,…,|a17|)とした場合に、以下の式(1−3)によって演算される。
Δa=+max(|a1|,…,|a17|)
−min(|a1|,…,|a17|) …式(1−3)
よって、例えば、対象者が2.5秒以上仰向けで静止し、az1=…=az17=−1,ax1=…=ax17=ay1=…=ay17=0が成立する場合、Δa=1−1=0が成立する。
【0050】
C5:割合演算手段(メンバシップ値演算手段、グレード値演算手段、確率演算手段)
割合演算手段C5は、前記受信情報記憶手段C3に記憶された加速度データと、前記動作情報記憶手段C4に記憶された動作情報とに基づいて、対象者の姿勢、動作の有無、動作の激しさの各割合(グレード値、確率)を演算する。実施例1の前記割合演算手段C5は、以下の式(2−1)〜式(2−13)から、直近50個の加速度ベクトルa1〜a50とメンバシップ関数f1〜f13とに応じたメンバシップ値STAND〜RUNを演算する(図3参照)。
【0051】
f1(ax1)=STAND …式(2−1)
f2(ax1)=SIT …式(2−2)
f3(ax1)=LIE …式(2−3)
f4(ay1)=LIE_LEFT …式(2−4)
f5(ay1)=LIE_RIGHT …式(2−5)
f6(ay1)=NOT_LIE_LR …式(2−6)
f7(az1)=LIE_FRONT …式(2−7)
f8(az1)=LIE_BACK …式(2−8)
f9(az1)=NOT_LIE_FB …式(2−9)
f10(σ2)=STOP …式(2−10)
f11(σ2)=MOVE …式(2−11)
f12(Δa)=WALK …式(2−12)
f13(Δa)=RUN …式(2−13)
よって、例えば、対象者が2.5秒以上仰向けで静止し、az1=…=az50=−1,ax1=…=ax50=ay1=…=ay50=0,σ2=Δa=0が成立する場合、LIE=NOT_LIE_LR=LIE_FRONT=STOP=WALK=1,STAND=SIT=LIE_LEFT=LIE_RIGHT=LIE_BACK=NOT_LIE_FB=MOVE=RUN=0が成立する。
【0052】
C6:判別値演算手段(ファジィルール適用値演算手段)
判別値演算手段C6は、前記割合演算手段C5によって演算された対象者の姿勢、動作の有無、動作の激しさの各割合から、動作を判別するために用いる判別値を演算する。実施例1の前記判別値演算手段C6は、前記割合演算手段C5によって演算された各メンバシップ値STAND〜RUNに予め設定された各ファジィルールを適用して、「立位」、「座位」、「臥位(前後左右の向きは不明)」、「臥位(左向き)」、「臥位(右向き)」、「臥位(左右の向きなし)」、「臥位(うつ伏せ)」、「臥位(仰向け)」、「臥位(前後の向きなし)」、「静止」、「弱」、「強」の判別値STAND,SIT,LIE,LIE_LEFT,LIE_RIGHT,NOT_LIE_LR,LIE_FRONT,LIE_BACK,NOT_LIE_FB,STOP,WALK,RUNを演算する。すなわち、「移動」のメンバシップ値MOVE以外を更新する。
なお、ファジィルールに関する詳細な説明については、例えば、特許文献3等に記載されており、公知であるため、詳細な説明については省略する。
【0053】
具体的には、以下の式(3−1)〜(3−12)から、演算されたメンバシップ値STAND〜RUNを演算する。
ここで、式(3−1)〜(3−12)に示す、NOT(A)とは、「Aの否定(余事象)」の演算子である。例えば、NOT(0.7) = 1 - 0.7 = 0.3が成立する。また、OR(A, B)とは、「AとBとの論理和」の演算子であり、AとBとのうちの最大値が演算される。例えば、OR(0.7, 0.3) = max(0.7, 0.3) = 0.7が成立する。さらに、AND(A, B)とは、「AとBとの論理積」の演算子であり、AとBとのうちの最小値が演算される。例えば、AND(0.7, 0.3) = min(0.7, 0.3) = 0.3が成立する。
なお、式(3−1)〜(3−12)に示す実施例1の各ファジィルールは、各メンバシップ関数gf1〜f13と同様に、予め取得した各動作の21個のサンプルに基づいて予め設定されている(図4参照)。
【0054】
NOT_LIE_LR = NOT(OR(LIE_LEFT, LIE_RIGHT)) …式(3−1)
NOT_LIE_FB = NOT(OR(LIE_FRONT, LIE_BACK)) …式(3−2)
LIE = OR(NOT(OR(STAND, SIT)),
OR(OR(LIE_LEFT, LIE_RIGHT), OR(LIE_FRONT, LIE_BACK))) …式(3−3)
STAND = AND(STAND, AND(NOT_LIE_LR, NOT_LIE_FB)) …式(3−4)
SIT = AND(SIT, AND(NOT_LIE_LR, NOT_LIE_FB)) …式(3−5)
LIE_LEFT = AND(LIE_LEFT, LIE) …式(3−6)
LIE_RIGHT = AND(LIE_RIGHT, LIE) …式(3−7)
LIE_FRONT = AND(LIE_ FRONT, LIE) …式(3−8)
LIE_BACK = AND(LIE_BACK, LIE) …式(3−9)
STOP = OR(STOP, OR(LIE, SIT) …式(3−10)
WALK = OR(WALK, MOVE) …式(3−11)
RUN = OR(RUN, MOVE) …式(3−12)
よって、例えば、対象者が2.5秒以上仰向けで静止し、LIE=NOT_LIE_LR=LIE_FRONT=STOP=WALK=1,STAND=SIT=LIE_LEFT=LIE_RIGHT=LIE_BACK=NOT_LIE_FB=MOVE=RUN=0が成立する場合、NOT_LIE_LR=LIE=LIE_FRONT=STOP=WALK=1,NOT_LIE_FB=STAND=SIT=LIE_LEFT=LIE_RIGHT=LIE_BACK=RUN=0に更新される。なお、「移動」のメンバシップ値MOVEは更新されず、MOVE=0が成立する。
【0055】
C7:動作判別手段
動作判別手段C7は、姿勢判別手段C7Aと、静動判別手段C7Bと、強弱判別手段C7Cとを有し、前記受信情報記憶手段C3に記憶された加速度データと、前記動作情報記憶手段C4に記憶された動作情報とに基づいて、対象者の動作を判別する。
C7A:姿勢判別手段
姿勢判別手段C7Aは、前記加速度データに基づいて、対象者の姿勢を判別する。実施例1の前記姿勢判別手段C7Aは、「立位」、「座位」、「臥位(前後左右の向きは不明)」、「臥位(左向き)」、「臥位(右向き)」、「臥位(左右の向きなし)」、「臥位(うつ伏せ)」、「臥位(仰向け)」、「臥位(前後の向きなし)」の各判別値STAND,SIT,LIE,LIE_LEFT,LIE_RIGHT,NOT_LIE_LR,LIE_FRONT,LIE_BACK,NOT_LIE_FBのうちの最大値に対応する姿勢(「立位」、「座位」、「臥位(前後左右の向きは不明)」、「臥位(左向き)」、「臥位(右向き)」、「臥位(左右の向きなし)」、「臥位(うつ伏せ)」、「臥位(仰向け)」、「臥位(前後の向きなし)」)を判別する。
【0056】
また、実施例1の前記姿勢判別手段C7Aは、最大値が複数存在する場合、STAND→SIT→LIE_LEFT,LIE_RIGHT,LIE_FRONT,LIE_BACK→NOT_LIE_LR,NOT_LIE_FB→LIEの優先順位で選択されるように予め設定されている。よって、例えば、最大値がSTAND,SITの場合、「立位」と判別される。また、例えば、対象者が2.5秒以上仰向けで静止し、NOT_LIE_LR=LIE=LIE_FRONT=1,NOT_LIE_FB=STAND=SIT=LIE_LEFT=LIE_RIGHT=LIE_BACK=0が成立する場合、「臥位(仰向け)」と判別される。
【0057】
C7B:静動判別手段
静動判別手段C7Bは、加速度ベクトルa1〜a50の分散σ2に基づいて、対象者の動作の有無、すなわち、「静止」および「移動」のいずれかを判別する。実施例1の前記静動判別手段C7Bは、「静止」、「移動」の各判別値STOP,MOVEのうちの大きな値に対応する「静止」および「移動」のいずれかを判別する。また、実施例1の前記静動判別手段C7Bは、STOP=MOVEが成立する場合、STOP→MOVEの優先順位で選択されるように予め設定されており、「静止」と判別される。よって、例えば、対象者が2.5秒以上仰向けで静止し、STOP=1,MOVE=0が成立する場合、「静止」と判別される。
【0058】
C7C:強弱判別手段
強弱判別手段C7Cは、加速度ベクトルa1〜a17の最大値と最小値との差分Δaに基づいて、対象者の動作の激しさを判別する。実施例1の前記強弱判別手段C7Cは、「弱」、「強」の各判別値WALK,RUNのうちの大きな値に対応する「弱」および「強」のいずれかを判別する。また、実施例1の前記強弱判別手段C7Cは、WALK=RUNが成立する場合、WALK→RUNの優先順位で選択されるように予め設定されており、「弱」と判別される。よって、例えば、対象者が2.5秒以上仰向けで静止しWALK=1,RUN=0が成立する場合、「弱」と判別される。
【0059】
よって、実施例1の前記動作判別手段C7は、前記姿勢判別手段C7Aによって判別された対象者の姿勢と、前記静動判別手段C7Bによって判別された対象者の動作の有無と、前記強弱判別手段C7Cによって判別された対象者の動作の激しさとに基づいて、対象者の動作を判別する。実施例1の前記動作判別手段C7は、姿勢が「立位」と判別された場合、「静止」ならば対象者の動作が「立位」であると判別し、「移動」且つ「弱」ならば対象者の動作が「歩行」であると判別し、「移動」且つ「強」ならば対象者の動作が「走行」であると判別する。また、姿勢が「座位」、「臥位(前後左右の向きは不明)」、「臥位(左向き)」、「臥位(右向き)」、「臥位(左右の向きなし)」、「臥位(うつ伏せ)」、「臥位(仰向け)」、「臥位(前後の向きなし)」と判別された場合、判別された姿勢が対象者の動作であると判別する。
【0060】
C8:動作推移記憶手段(動作ログ記憶手段)
動作推移記憶手段C8は、前記動作判別手段C7によって判別された対象者の動作の推移(動作ログ)を記憶する。実施例1の前記動作推移記憶手段C8は、前記動作判別手段C7によって判別された対象者の動作と前記受信情報記憶手段C3に記憶された情報とを対応付けて記憶することにより、対象者の動作の推移を記憶する。すなわち、前記動作推移記憶手段C8には、前記受信情報記憶手段C3に記憶された時期ごとに、対象者の動作(「立位」、「歩行」、「走行」、「座位」、「臥位(前後左右の向きは不明)」、「臥位(左向き)」、「臥位(右向き)」、「臥位(左右の向きなし)」、「臥位(うつ伏せ)」、「臥位(仰向け)」、「臥位(前後の向きなし)」)が記憶される。また、実施例1の前記動作推移記憶手段C8には、判別された前記動作だけでなく前記動作の有無(「静止」、「移動」)と前記動作の激しさ(「弱」、「強」)が併せて記憶される。
この結果、実施例1の前記動作推移記憶手段C8は、センサタグIDに応じて、対象者ごとに動作の推移(姿勢を含む動作、動作の有無、動作の激しさ)を記憶する。
【0061】
C9:行動情報記憶手段(動作コンテキスト記憶手段)
行動情報記憶手段C9は、前記動作推移記憶手段C8に記憶された対象者の動作の推移と、対象者の行動とを対応づける情報としての行動情報を記憶する。実施例1の前記行動情報記憶手段C9は、前記行動情報として、対象者の動作の前後関係(文脈、脈絡)の情報(対象者の行動の判別条件の情報)である動作コンテキスト(Context、コンテクスト)(c1〜c3)をセンサタグIDと対応付けて記憶する。
すなわち、実施例1の前記行動情報記憶手段C9は、センサタグIDに応じて、対象者ごとに各動作コンテキスト(c1〜c3)を記憶する。
【0062】
具体的には、実施例1では、対象者の行動の一例として、立っている状態で倒れる「転倒」、寝ている状態で向きを変更する「寝返り」、寝ている状態から起き上がる「離床(起床)」が予め設定されている。ここで、「転倒」については、図4に示すように、「立位」、「歩行」、「走行」が一定期間継続された後に数秒間で姿勢が大きく崩れて急激な加速度の変化が発生して「座位」、「臥位」に変化すると考えられる。よって、実施例1では、「転倒」の動作コンテキストc1として、『「立位」、「歩行」、「走行」のいずれかが20秒以上連続した後、「座位」、「臥位(前後左右の向きは不明)」、「臥位(左向き)」、「臥位(右向き)」、「臥位(左右の向きなし)」、「臥位(うつ伏せ)」、「臥位(仰向け)」、「臥位(前後の向きなし)」に変化した際の直前の2.5秒間に「移動」且つ「強」の判別回数が予め設定された閾値を超えること』に関する情報が予め設定されている。
【0063】
図5は縦軸を加速度とし横軸を時間とした場合の3軸の加速度データの説明図であり、図5Aは対象者が左向き・うつ伏せ・左向き・仰向けの順に寝返りした際の加速度データの一例の説明図、図5Bは対象者が仰向けの状態から膝を立てて床を肘や手で支えながら上体を起こして離床した際の加速度データの一例の説明図である。
また、「寝返り」についても「転倒」と同様に、図5Aに示すように、「臥位(左向き)」、「臥位(右向き)」、「臥位(うつ伏せ)」、「臥位(仰向け)」のいずれかが同じ動作で変化せずに一定期間継続された後に数秒間で姿勢が大きく変化し、別の「臥位(左向き)」、「臥位(右向き)」、「臥位(うつ伏せ)」、「臥位(仰向け)」に変化すると考えられる。よって、実施例1では、「寝返り」の動作コンテキストc2として、『「臥位(左向き)」、「臥位(右向き)」、「臥位(うつ伏せ)」、「臥位(仰向け)」のいずれかが同じ動作で変化せずに20秒以上連続した後、別の「臥位(左向き)」、「臥位(右向き)」、「臥位(うつ伏せ)」、「臥位(仰向け)」に変化すること』に関する情報が予め設定されている。
【0064】
さらに、「離床(起床)」についても「寝返り」と同様に、図5Bに示すように、任意の方向への「臥位」が一定期間継続された後に姿勢が大きく変化し、「立位」、「座位」に変化すると考えられる。よって、実施例1では、「離床(起床)」の動作コンテキストc3として、『「臥位(前後左右の向きは不明)」、「臥位(左向き)」、「臥位(右向き)」、「臥位(左右の向きなし)」、「臥位(うつ伏せ)」、「臥位(仰向け)」、「臥位(前後の向きなし)」のいずれかが20秒以上連続した後、「立位」、「座位」に変化すること』に関する情報が予め設定されている。
よって、前記行動情報記憶手段C9には、予め設定された「転倒」、「寝返り」、「離床(起床)」の動作コンテキストc1〜c3をセンサタグIDと対応付けて記憶する。
【0065】
C10:行動判別手段
行動判別手段C10は、「転倒」の動作コンテキストc1に基づいて対象者の「転倒」を判別する転倒判別手段C10Aと、「寝返り」の動作コンテキストc2に基づいて対象者の「寝返り」を判別する寝返り判別手段C10Bと、「離床(起床)」の動作コンテキストc3に基づいて、対象者の「離床(起床)」を判別する離床判別手段C10Cとを有し、前記動作推移記憶手段C8に記憶された対象者の動作の推移と前記行動情報記憶手段C9に記憶された行動情報とに基づいて、対象者の行動を判別する。実施例1の前記行動判別手段C10は、前記動作推移記憶手段C8に記憶内容、すなわち、対象者の動作の推移が更新された場合に、前記行動情報記憶手段C9に記憶された「転倒」、「寝返り」、「離床(起床)」の各動作コンテキストc1〜c3に基づいて、対象者の「転倒」、「寝返り」、「離床(起床)」を判別する。
【0066】
C11:行動認識情報記憶手段(行動記憶手段)
行動認識情報記憶手段C11は、前記行動判別手段C10によって判別された対象者の行動に基づく行動認識情報を記憶する。実施例1の前記行動認識情報記憶手段C11は、前記行動判別手段C10によって判別された対象者の行動と、前記受信情報記憶手段C3に記憶された情報とを対応付けて記憶する。すなわち、実施例1の前記行動認識情報記憶手段C11には、前記受信情報記憶手段C3に記憶された時期ごとに、対象者の動作の推移に基づく行動が記憶される。
この結果、実施例1の前記行動認識情報記憶手段C11は、センサタグIDに応じて、対象者ごとに行動認識情報を記憶する。
【0067】
図6は実施例1の行動表示画像の説明図である。
C12:行動表示手段
行動表示手段C12は、行動表示画像表示手段C12Aと、動作推移表示手段C12Bと、行動認識情報表示手段C12Cと、行動認識情報通報手段C12Dとを有し、前記行動判別手段C10によって判別された対象者の行動を表示する。実施例1の前記行動表示手段C12は、センサタグIDに応じて、対象者ごとに判別された行動を表示する。
C12A:行動表示画像表示手段
行動表示画像表示手段C12Aは、図6に示す行動表示画像101をディスプレイ2bに表示する。実施例1の前記行動表示画像101は、対象者の動作の推移を表示する動作推移表示部101aと、対象者の行動を表示する行動表示部102aとを有する。実施例1の前記行動表示画像表示手段C12Aは、センサタグIDに応じて、対象者ごとに行動表示画像101を表示する。
【0068】
C12B:動作推移表示手段
動作推移表示手段C12Bは、前記受信情報記憶手段C3に記憶された時期に応じた時刻と、前記動作推移記憶手段C8に記憶された前記時刻に応じた動作と、前記受信情報記憶手段C3に記憶されたアクセスポイントIDおよびRSSI値に基づくセンサタグ4,4のアクセスポイント3,3までの距離とを動作推移表示部101aに表示する。実施例1の前記動作推移表示手段C12Bは、センサタグIDに応じて、対象者ごとに1分ごとの対象者の動作の推移と前記距離とを動作推移表示部101aに表示する。なお、RSSI値に基づく前記距離は、実験等により予め設定された関数に基づいて演算され、例えば、−128[dBm]の場合に30[m]、+128[dBm]の場合に0[m]が演算される。
【0069】
C12C:行動認識情報表示手段
行動認識情報表示手段C12Cは、前記受信情報記憶手段C3に記憶された時期に応じた時刻と、前記行動認識情報記憶手段C11に記憶された前記時刻に応じた行動とを行動表示部102aに表示する。実施例1の前記行動認識情報表示手段C12Cは、センサタグIDに応じて、対象者ごとに認識した時刻と行動とを行動表示部102aに表示する。
C12D:行動認識情報通報手段
行動認識情報通報手段C12Dは、行動表示部102aに表示される時刻と行動とを外部の通報先(例えば、老人ホームの介護士ステーションや、離れて暮らす家族、ホームセキュリティ会社、病院のナースステーション(管理室)等)に通報する(図1参照)。
【0070】
(実施例1のフローチャートの説明)
次に、実施例1の前記各制御部の各プログラムの処理の流れをフローチャートを使用して説明する。なお、センサタグ4,4がアクセスポイント3,3に情報を送信する処理については、加速度センサ4a,4aによって検出された加速度データと端末情報記憶手段CS1に記憶されたセンサタグIDと含む情報を50[ms]ごとに送信するだけである。また、アクセスポイント3,3がサーバ2に情報を転送する処理については、センサタグ4,4から受信した情報にアクセスポイントIDとRSSI値とを付加した情報をサーバ2に送信するだけである。また、サーバ2で行動表示画像101を表示する処理については、センサタグIDに応じた対象者ごとの行動表示画像101をディスプレイ2aに表示し、1分ごとに各対象者の動作の推移とアクセスポイント3,3からの距離とを動作推移表示部101aに表示すると共に、各対象者の行動が判別された場合に行動認識情報を行動表示部102aに表示するだけである。よって、説明の簡単のため、図示および詳細な説明を省略する。
【0071】
(実施例1の動作推移記憶処理の説明)
図7は実施例1の動作推移記憶処理のフローチャートである。
図7のフローチャートの各ST(ステップ)の処理は、サーバ2のコンピュータ本体2aの制御部のROM等に記憶されたプログラムに従って行われる。また、この処理は前記制御部の他の各種処理と並行してマルチタスクで実行される。
図7に示すフローチャートは、前記制御部の行動認識プログラムAP1が起動した場合に開始される。
【0072】
図7のST101において、アクセスポイント3,3から転送された情報、すなわち、加速度データ、センサタグID、アクセスポイントID、RSSI値を含む情報を受信したか否かを判別する。イエス(Y)の場合はST102に移り、ノー(N)の場合はST101を繰り返す。
ST102において、受信した時期と受信した情報とを対応付けて記憶する。そして、ST103に移る。
ST103において、直近50個の加速度ベクトルa1〜a50とメンバシップ関数f1〜f13とに応じたメンバシップ値STAND〜RUNを演算する(図3、式(2−1)〜式(2−13)参照)。そして、ST104に移る。
ST104において、演算されたメンバシップ値STAND〜RUNにファジィルールを適用して判別値STAND〜RUNを演算する。すなわち、メンバシップ値STAND〜RUNを更新する。そして、ST105に移る。
ST105において、対象者の姿勢と動作の有無と動作の激しさとに基づく対象者の動作を判別する動作判別処理を実行する。そして、ST106に移る。
ST106において、判別された動作を受信した時期と対応付けて記憶することにより、対象者の動作の推移を記憶する。そして、ST101に戻る。
【0073】
(実施例1の動作判別処理の説明)
図8は実施例1の動作判別処理のフローチャートであり、図7のST105のサブルーチンの説明図である。
図8のST151において、判別値STAND〜NOT_LIE_FBの最大値に対応する姿勢(「立位」、「座位」、「臥位(前後左右の向きは不明)」、「臥位(左向き)」、「臥位(右向き)」、「臥位(左右の向きなし)」、「臥位(うつ伏せ)」、「臥位(仰向け)」、「臥位(前後の向きなし)」)を判別する。そして、ST152に移る。
ST152において、判別値STOP,MOVEの大きな値に対応する対象者の動作の有無(「静止」または「移動」)を判別する。そして、ST153に移る。
ST153において、判別値WALK,RUNの大きな値に対応する対象者の動作の激しさ(「弱」または「強」)を判別する。そして、ST154に移る。
ST154において、対象者の姿勢が「立位」であるか否かを判別する。イエス(Y)の場合はST155に移り、ノー(N)の場合はST160に移る。
ST155において、動作の有無が「移動」であるか否かを判別する。ノー(N)の場合はST156に移り、イエス(Y)の場合はST157に移る。
【0074】
ST156において、対象者の動作を「立位」と判別する。そして、前記動作判別処理を終了して図7のST105に戻る。
ST157において、対象者の動作の激しさが「弱」であるか否かを判別する。イエス(Y)の場合はST158に移り、ノー(N)の場合はST159に移る。
ST158において、対象者の動作を「歩行」と判別する。そして、前記動作判別処理を終了して図7のST105に戻る。
ST159において、対象者の動作を「走行」と判別する。そして、前記動作判別処理を終了して図7のST105に戻る。
ST160において、対象者の動作を判別された姿勢(「座位」、「臥位(左向き)」、「臥位(右向き)」、「臥位(うつ伏せ)」、「臥位(仰向け)」、「臥位(左右の向きなし)」、「臥位(前後の向きなし)」、「臥位(前後左右の向きは不明)」と判別する。そして、前記動作判別処理を終了して図7のST105に戻る。
【0075】
(実施例1の行動認識処理の説明)
図9は実施例1の行動認識処理のフローチャートである。
図9のフローチャートの各ST(ステップ)の処理は、前記サーバ2の制御部のROM等に記憶されたプログラムに従って行われる。また、この処理は前記制御部の他の各種処理と並行してマルチタスクで実行される。
図9に示すフローチャートは、前記制御部の前記行動認識プログラムAP1が起動した場合に開始される。
【0076】
図9のST201において、動作推移記憶手段C8に記憶された動作の推移が更新されたか否かを判別する。イエス(Y)の場合はST202に移り、ノー(N)の場合はST201を繰り返す。
ST202において、各動作コンテキストc1〜c3に基づいて、対象者の行動(「転倒」、「寝返り」、「離床(起床)」)を判別する行動判別処理を実行する。そして、ST203に移る。
ST203において、前記行動判別処理によって行動が判別されたか否かを判別する。イエス(Y)の場合はST204に移り、ノー(N)の場合はST201に戻る。
ST204において、判別された行動を受信した時期と対応付けて記憶することにより、行動認識情報を記憶する。そして、ST205に移る。
ST205において、前記時期に応じた時刻と行動認識情報とを通報先に通報する。そして、ST201に戻る。
【0077】
(実施例1の行動判別処理の説明)
図10は実施例1の行動判別処理のフローチャートであり、図9のST202のサブルーチンの説明図である。
図10のST251において、動作推移記憶手段C8に記憶された動作の推移に基づいて、20秒以上「立位」、「歩行」、「走行」のいずれかが連続後に、最新の動作が「座位」、「臥位(前後左右の向きは不明)」、「臥位(左向き)」、「臥位(右向き)」、「臥位(左右の向きなし)」、「臥位(うつ伏せ)」、「臥位(仰向け)」、「臥位(前後の向きなし)」のいずれかに変化したか否かを判別する。イエス(Y)の場合はST252に移り、ノー(N)の場合はST254に移る。
ST252において、直前の2.5秒間に、「移動」且つ「強」の判別回数が閾値を超えたか否かを判別する。イエス(Y)の場合はST253に移り、ノー(N)の場合は前記行動判別処理を終了して図9のST202に戻る。
ST253において、対象者の行動を「転倒」と判別する。そして、前記行動判別処理を終了して図9のST202に戻る。
【0078】
ST254において、動作推移記憶手段C8に記憶された動作の推移に基づいて、20秒以上同じ「臥位(左向き)」、「臥位(右向き)」、「臥位(うつ伏せ)」、「臥位(仰向け)」のいずれかが連続後に、別の「臥位(左向き)」、「臥位(右向き)」、「臥位(左右の向きなし)」、「臥位(うつ伏せ)」、「臥位(仰向け)」、「臥位(前後の向きなし)」のいずれかに変化したか否かを判別する。イエス(Y)の場合はST255に移り、ノー(N)の場合はST256に移る。
ST255において、対象者の行動を「寝返り」と判別する。そして、前記行動判別処理を終了して図9のST202に戻る。
【0079】
ST256において、動作推移記憶手段C8に記憶された動作の推移に基づいて、20秒以上「臥位(前後左右の向きは不明)」、「臥位(左向き)」、「臥位(右向き)」、「臥位(左右の向きなし)」、「臥位(うつ伏せ)」、「臥位(仰向け)」、「臥位(前後の向きなし)」のいずれかが20秒以上連続後に、「立位」または「座位」に変化したか否かを判別する。イエス(Y)の場合はST257に移り、ノー(N)の場合は前記行動判別処理を終了して図9のST202に戻る。
ST257において、対象者の行動を「離床(起床)」と判別する。そして、前記行動判別処理を終了して図9のST202に戻る。
【0080】
(実施例1の作用)
前記構成を備えた実施例1の前記行動認識システム1では、サーバ2において、図7、図8に示す動作推移記憶処理および動作判別処理が実行され、各対象者の腰に装着されたセンサタグ4,4から送信された加速度データ等を含む情報の受信信号に基づいて、対象者の動作の推移が記憶される。実施例1の動作推移記憶処理では、ファジィ推論を適用して、検出された加速度データに応じた各動作が検出時期ごとに判別されて記憶される。具体的には、直近50個の加速度データに応じたメンバシップ値STAND〜RUNが予め設定された各メンバシップ関数f1〜f13によって演算され、演算されたメンバシップ値STAND〜RUNにファジィルールが適用されて更新された判別値STAND〜RUNの最大値に基づいて各動作が判別され記憶される。
また、実施例1の前記行動認識システム1では、サーバ2において、図9、図10に示す行動認識処理および行動判別処理が実行され、記憶された動作の推移と、各行動に応じた各動作コンテキストc1〜c3とに基づいて、動作の前後関係から判別された行動が記憶されて通報先に通報される。
【0081】
ここで、発明者は、前記各判別処理(図8、図10参照)を実行することにより、各動作、各行動を判別できるか否かを調べるために、実験を行った。
前記実験では、サーバ2や、アクセスポイント3、センサタグ4を実施例1と同様に配置し、年齢が20代の健康な被験者(健常者)7人に対して、センサタグ4を腰に取り付けて、被験者全員に共通した各メンバシップ関数f1〜f13や各動作コンテキストc1〜c3を設定、記憶した上で、1人ずつ各動作、各行動をそれぞれ3回(3セット)試行させて、各判別処理を実行した判別結果と前記試行とを照合した認識率を算出した。
【0082】
まず、姿勢については、「立位」、「座位」、「臥位(左向き)」、「臥位(右向き)」、「臥位(うつ伏せ)」、「臥位(仰向け)」について試行して認識率を算出した。
この結果、「立位」については認識率100[%]であり、「臥位」についても前傾等して静止できていない場合に「座位」と誤認識することがあったが、静止できている場合には4方向全て認識率は100[%]であった。なお、「座位」については腰の角度に応じて識別できない場合があったが、腰の角度が軽く椅子の背もたれを使う程度で静止できている場合には認識率100[%]が得られた。なお、「立位」と「座位」とを交互に繰り返す行動(「起立着席」)を試行してみたところ、78.2[%]の識別率が得られた。
【0083】
次に、動作については、継続した「弱」、継続した「強」、「弱」と「強」とを交互に繰り返す動作、「弱」と「立位(静止)」とを交互に繰り返す動作について試行して認識率を算出した。
この結果、継続した「弱」、「弱」と「強」とを交互に繰り返す動作については認識率100[%]であり、継続した「強」、「弱」と「立位(静止)」とを交互に繰り返す動作についても、それぞれ77.7[%],68.3[%]の認識率が得られた。
【0084】
次に、行動については、前方への「転倒」、後方への「転倒」、左方への「転倒」、右方への「転倒」、「寝返り」、「離床(起床)」について試行して認識率を算出した。また、各転倒については、記憶された動作推移を確認して転倒方向の識別率も算出した。
この結果、「寝返り」、「離床(起床)」については認識率100[%]であり、左方への「転倒」、右方への「転倒」については認識率だけでなく転倒方向の認識率も100[%]であった。また、前方への「転倒」、後方への「転倒」については認識率がそれぞれ90.4[%],95.0[%]であり転倒方向の認識率がそれぞれ85.7[%],95[%]であった。
【0085】
この結果、実施例1の前記行動認識システム1は、対象者(被験者、健常者)全員に共通した各メンバシップ関数f1〜f13や各動作コンテキストc1〜c3を設定したが、センサタグ4,4から送信された加速度データ等を含む情報の受信信号に基づいて、各対象者の動作や行動を判別できることがわかる。すなわち、実施例1の前記行動認識システム1は、人間の単純な姿勢や動作だけでなく、動作の連続性から判別可能な人間の行動を認識することができることがわかる。
なお、前記実験では、7人の被験者全員が同様の体格であったため、被験者全員に共通する各メンバシップ関数f1〜f13等を設定したが、同様の体格であれば同じ各メンバシップ関数f1〜f13等であっても各対象者の動作や行動を判別できることがわかる。なお、各対象者に応じて最適の各メンバシップ関数f1〜f13等を設定すれば、前記実験より高い認識率で各対象者の動作や行動を判別できることが期待できる。
したがって、実施例1の前記行動認識システム1では、サーバSVの管理者は、認識された各対象者の姿勢や動作や行動と、記憶された各対象者の情報に基づく生活パターン等から、これらが複合した異常事態(例えば、転倒したまま長時間起き上がらないの事態や、火災等の非難時に倒れて逃げ遅れている事態等)や体調不良(例えば、昼間の活動量が普段より少ない、昼間もずっと寝込んでいる)を確認する(看視する、見守る)ことができる。
【0086】
また、実施例1では、室内全域がアクセスポイント3,3の受信範囲内であるため、室内のセンサタグ4,4からの前記受信信号は常にサーバ2に転送可能であり、対象者がアクセスポイント3,3に対して身体の向きや姿勢が任意に変化しても前記受信信号は常にサーバ2に転送できる。
したがって、実施例1の前記行動認識システム1は、ステレオ視の死角が発生したり室内の照明環境によって判別ミスが発生する特許文献1〜3等の構成に比べ、人間の動作の判別ミスを低減し易くすることができる。
特に、実施例1では、暗闇でも対象者の動作を判別できるため、例えば、照明を落とした夜間の室内や、夜間の屋外でも対象者の動作の推移を記憶したり、行動を認識したりすることができる。
この結果、実施例1の前記行動認識システム1では、人間の動作の判別ミスを低減し易くしつつ、人間の動作の連続性から判別可能な行動を認識することができる。
【0087】
ここで、特許文献1〜3に記載の技術では、カメラに複数の人間の撮像対象(複数のユーザの顔や手)が撮像された場合、各ユーザの顔や手を別々に追跡する必要があるが、例えば、2人以上のユーザの顔や手が追跡不能になった後、再び追跡可能となった場合には、撮像された画像から個人を特定することが困難であるため、複数の人間の動作を判別し難いという問題があった。
これに対して、前記構成を備えた実施例1の前記行動認識システム1では、前記受信情報にセンサタグIDが含まれているため、センサタグIDで各対象者を特定することができる。この結果、実施例1の前記行動認識システム1は、複数の人間から個人を特定することが困難な特許文献1〜3の構成に比べ、複数の人間が動作した場合に動作した人物を容易に特定することができる。
【0088】
また、特許文献1〜3に記載の技術では、撮像対象を追跡可能な範囲を拡張するには、複数台のカメラをステレオ視可能な状態で配置してゆく必要があるため、ユーザの動作を判別可能な範囲を拡張するには、コストがかかり過ぎるという問題があった。
これに対して、前記構成を備えた実施例1の前記行動認識システム1では、前記受信情報にアクセスポイントIDとRSSI値とが含まれている。このため、アクセスポイント3,3を複数台に増設して対象者の動作を判別する範囲を拡大した場合に、アクセスポイントIDとRSSI値によって各対象者の加速度データを転送した位置(各アクセスポイント3,3からの距離)を特定できる。
【0089】
この結果、実施例1の前記行動認識システム1は、対象者の動作や行動を判別可能な範囲を拡張することができ、高額なカメラをステレオ視可能な状態で増設してゆく必要がある特許文献1〜3の構成に比べ、人間の動作や行動を判別可能な範囲を拡張するコストを低減することができる。
特に、実施例1では、センサタグ4,4は、ZigBee(登録商標)ネットワーク6を介して、アクセスポイント3,3と接続されており、他の無線通信規格の端末に比べても安価で増設することができ、拡張コストをさらに低減することができる。
【0090】
また、前記構成を備えた実施例1の前記行動認識システム1では、サーバ2に記憶された受信時期ごとの動作の推移と行動とが表示された行動表示画像101をディスプレイ2bに表示することが可能になっている。よって、実施例1の前記行動認識システム1は、記憶された動作や行動をサーバ2の管理者が行動表示画像101で確認する(看視する、見守る)ことが可能となっている。
【実施例2】
【0091】
次に、本発明の実施例2の説明をするが、この実施例2の説明において、前記実施例1の構成要素に対応する構成要素には同一の符号を付して、その詳細な説明を省略する。
この実施例2は、下記の点で前記実施例1と相違しているが、他の点では前記実施例1と同様に構成されている。
【0092】
図11は実施例1の図1に対応する説明図であって実施例2の行動認識システムの全体説明図である。
図11において、実施例2の前記行動認識システム1′は、実施例1の前記サーバ(行動表示装置、動作推移記憶装置)2を有する。また、前記行動認識システム1′は、実施例1の前記アクセスポイント3,3が省略されており、実施例1の前記センサタグ4,4に替えて、前記対象者が携帯する携帯端末(端末、行動認識用の端末、行動認識装置)4′,4′とを有する。実施例2では、前記携帯端末4′,4′は、第3の情報通信回線の一例としての携帯電話網(移動通信ネットワーク)5′を介して、前記サーバ2と接続されている。
また、実施例2の前記携帯端末4′,4′は、実施例1と同様に対象者の腰の位置に装着されており、実施例1の加速度センサ4a,4aと、GPS(Global Positioning System、全地球測位システム)衛星からの情報を受信可能なGPS受信機4b,4bとを有する。
【0093】
(実施例2の制御部の説明)
(実施例2の携帯端末4′,4′の制御部の説明)
図12は実施例1の図2に対応する説明図であって実施例2の行動認識システムのサーバと携帯端末との各制御部が備えている各機能をブロック図(機能ブロック図)で示した図である。
図12において、前記携帯端末4′,4′の制御部は、I/O、ROM、RAM、CPU、クロック発振器等を有し、前記構成の携帯端末ZS1は、ソリッドステートドライブ(SSD)やROM等に記憶されたプログラムを実行することにより種々の機能を実現することができる。
前記制御部には、オペレーティングシステムOS、アプリケーションプログラムとしての行動認識プログラムAP1′、その他の図示しないソフトウェアが記憶されている。
【0094】
(実施例2の行動認識プログラムAP1′の説明)
実施例2の前記行動認識プログラムAP1′は、実施例1の前記動作情報記憶手段C4、前記割合演算手段C5、前記判別値演算手段C6、前記動作判別手段C7、前記動作推移記憶手段C8、前記行動情報記憶手段C9、前記行動判別手段C10、前記行動認識情報記憶手段C11を有する。また、前記行動認識プログラムAP1′は、実施例1の前記端末情報記憶手段CS1、前記受信情報記憶手段C3、前記行動表示手段C12に替えて、端末情報記憶手段CS1′、取得情報記憶手段C3′、行動送信手段C13を有する。
【0095】
CS1′:端末情報記憶手段(識別情報記憶手段、携帯端末ID記憶手段、端末識別情報記憶手段)
端末情報記憶手段CS1′は、携帯端末4′,4′ごとに予め設定された端末ID(端末情報、端末識別情報)を記憶する。
C3′:取得情報記憶手段
取得情報記憶手段C3′は、加速度センサ4a,4aから加速度データを取得した時期(タイムスタンプ)を記憶する取得時期記憶手段(タイムスタンプ記憶手段)C3A′と、GPS受信機4b,4bがGPS衛星から受信した情報から位置データ(位置情報)を演算する位置情報演算手段C3B′とを有し、加速度センサ4a,4aから取得した加速度データと時期とを対応付けて記憶する。すなわち、実施例2の前記取得情報記憶手段C3′には、取得した時期ごとに、加速度データ、位置データが記憶される。
なお、実施例2の前記動作情報記憶手段C4、前記割合演算手段C5、前記動作判別手段C7、前記動作推移記憶手段C8、前記行動認識情報記憶手段C11については、「前記受信情報記憶手段C3」を「前記取得情報記憶手段C3′」、「センサタグID」を「端末ID」に読み替えるだけで、実施例1と同様の説明になるため、詳細な説明については省略する。
【0096】
C13:行動送信手段(動作推移送信手段)
行動表示手段C13は、実施例1の前記行動認識情報通報手段C12Dを有し、前記行動判別手段C10によって判別された対象者の行動を送信する。実施例2の前記行動送信手段C13は、前記行動認識情報通報手段C12Dによって実施例1と同様の情報を通報先に通報すると共に、前記端末情報記憶手段CS1′に記憶された端末IDと、前記受信情報記憶手段C3′に記憶された1時間分の加速度データおよび位置データと、前記動作推移記憶手段C8に記憶された1時間分の対象者の動作の推移と、前記行動認識情報記憶手段C11に記憶された1時間分の行動認識情報とを1時間ごとにサーバ2に送信する。
【0097】
(実施例2のサーバ2の制御部の説明)
また、実施例2の前記サーバ2のコンピュータ本体2aの制御部には、実施例1の前記行動認識プログラムAP1に替えて、アプリケーションプログラムとしての行動表示プログラム(動作推移記憶プログラム)AP2が記憶されている。
【0098】
(実施例2の行動表示プログラムAP2の説明)
前記行動表示プログラムAP2は、端末IDに基づいて対象者を特定する実施例1と同様の前記特定手段C1と、下記の機能手段(プログラムモジュール)を有する。
C14:行動受信手段(動作推移受信手段)
行動受信手段C14は、前記行動送信手段C13から送信された情報(端末ID、1時間分の加速度データと位置データ、1時間分の対象者の動作の推移、1時間分の行動認識情報)を受信する。
C15:受信情報記憶手段(動作推移記憶手段)
受信情報記憶手段C15は、前記行動受信手段C14によって受信した前記情報を記憶する。
【0099】
C16:行動表示手段(動作推移表示手段)
行動表示手段C16は、実施例1の前記行動表示画像表示手段C12Aと、前記動作推移表示手段C12Bと、前記行動認識情報表示手段C12Cとを有し、前記受信情報記憶手段C15に記憶された対象者の行動を表示する。
なお、実施例2の動作推移表示部101a(図6参照)には、実施例1のRSSI値に基づく距離に替えて、対象者の位置を特定する図示しない地図画像のアドレス情報(例えば、ホームページへのハイパーリンク等)が表示される。
【0100】
(実施例2のフローチャートの説明)
次に、実施例2の前記各制御部の各プログラムの処理の流れをフローチャートを使用して説明する。なお、携帯端末4′,4′がサーバ2に情報を送信する処理については、端末ID、1時間分の加速度データと位置データ、1時間分の対象者の動作の推移、1時間分の行動認識情報を1時間ごとに送信するだけであるため、説明の簡単のため、図示および詳細な説明を省略する。
【0101】
(実施例2の動作推移記憶処理の説明)
図13は実施例1の図7に対応する説明図であって実施例2の動作推移記憶処理のフローチャートである。
図13に示す実施例2の動作推移記憶処理のフローチャートは、実施例1の前記動作推移記憶処理のフローチャートのST101とST102とに替えて、以下のST101′とST102′とを実行するだけである。よって、その他のST103〜ST106については実施例1と同様であるため、詳細な説明を省略する。
図13のST101′において、加速度センサ4aが加速度データを検出したか否かを判別する。イエス(Y)の場合はST102′に移り、ノー(N)の場合はST101′を繰り返す。
ST102′において、検出した時期と加速度データとを対応付けて記憶する。そして、ST103〜ST106の各処理を実行して、ST101に戻る。
【0102】
(実施例2の作用)
前記構成を備えた実施例2の前記行動認識システム1′では、携帯端末4′,4′において、図13、図8に示す動作推移記憶処理および動作判別処理と、図9、図10に示す行動認識処理および行動判別処理とが実行され、対象者の動作の推移と対象者の行動とが記憶されて通報先に通報される。
したがって、実施例2の前記行動認識システム1′では、加速度センサ4a,4aが設けられた携帯端末4′,4′で対象者の動作や行動を判別することができ、対象者が携帯電話網5′の通話エリア外に移動してサーバ2に情報を送信できない場合でも、対象者の動作や行動を判別することができる。
【0103】
また、前記構成を備えた実施例2の前記行動認識システム1′では、サーバ2において、携帯端末4′,4′から送信された対象者の動作の推移や行動等の情報が受信されて記憶され、対象者ごとの行動表示画像101をディスプレイ2bに表示することが可能となっている。
したがって、実施例2の前記行動認識システム1′では、携帯端末4′,4′で判別された動作や行動を記憶容量の大きいサーバ2に記憶でき、実施例1と同様に、記憶した動作や行動をサーバ2の管理者が行動表示画像101で確認する(看視する、見守る)ことが可能となっている。
また、前記構成を備えた実施例2の前記行動認識システム1′では、サーバ2の前記受信情報にGPS受信機4b,4bがGPS衛星から受信した情報に基づく位置データとが含まれており、実施例1と同様に、各対象者の加速度データを検出した位置(動作や行動が判別された位置)を特定できる。
その他、実施例2の前記行動認識システム1′は、実施例1の前記行動認識システム1と同様の作用効果を奏する。
【0104】
(変更例)
以上、本発明の実施例を詳述したが、本発明は、前記実施例に限定されるものではなく、特許請求の範囲に記載された本発明の要旨の範囲で、種々の変更を行うことが可能である。本発明の変更例(H01)〜(H021)を下記に例示する。
(H01)前記実施例では、対象者の動作の推移に基づいて、対象者の3種類の行動(「転倒」、「寝返り」、「離床(起床)」を判別したが、動作コンテキストを追加することによりその他の行動(例えば、「起立」、「着席」、「躓き」、「体当たり」、「着床」等)を判別することも可能である。
(H02)前記実施例では、対象者の行動が判別された場合に通報先に通報したが、これに限定されず、行動がない場合にも通報することが可能である。例えば、長時間同じ「臥位」が継続している場合に、「倒れ込んで起きる気配がない」と判断して通報することも可能である。
【0105】
(H03)前記実施例では、姿勢を含む動作として「立位」、「座位」、前後左右の「臥位」等を判別したが、これに限定されず、例えば、姿勢として「立位」、「座位」、前後左右の「臥位」等を判別し、動作として「静止」、「歩行」、「走行」を判別することも可能である。
(H04)前記実施例では、前後左右の「臥位」等を判別し、「立位」、「座位」については1種類しか判別していないが、これに限定されず、前後左右に傾斜した「立位」、「座位」と通常の(中立の)「立位」、「座位」の5種類の「立位」、「座位」を判別することも可能である。
【0106】
(H05)前記実施例1では、センサタグIDが異なるセンサタグ4,4とアクセスポイントIDが異なるアクセスポイント3,3とが2台ずつの構成としたが、これに限定されず、1台またはセンサタグIDが異なる3台以上のセンサタグと1台またはアクセスポイントIDが異なる3台以上のアクセスポイントとの構成でも各対象者の動作や行動を判別することが可能である。また、前記実施例2についても同様に、端末IDが異なる携帯端末4′,4′が2台の構成としたが、これに限定されず、1台または端末IDが異なる3台以上の携帯端末の構成でも各対象者の動作や行動を判別することが可能である。なお、複数のアクセスポイントでIDが同一のセンサタグや携帯端末から情報を受信した場合には、RSSI値が最大となるアクセスポイントが、センサタグや携帯端末から最も近いアクセスポイントであると判別できる。
(H06)前記実施例のように、センサタグ4や携帯端末4′をバックル部分に固定支持することが好ましいが、これに限定されず、例えば、胸ポケットに入れた場合でも、対象者の動作や行動を判別することが可能である。この場合、対象者のメンバシップ関数f1〜f13や動作コンテキストc1〜c3を胸の加速度センサ4aからの加速度に対応できるように設定する必要がある。
【0107】
(H07)前記実施例1では、センサタグ4,4からは、各対象者の動作や行動に関する情報として、加速度センサ4a,4aから検出された加速度データを送信したが、各対象者の動作や行動に関する情報についてはこれに限定されず、例えば、センサタグ4,4に体温計や脈拍計等を設けて、体温計や脈拍計が測定した各対象者の体温や脈拍等の情報を送信することも可能である。また、例えば、特許文献1〜3に記載の公知のカメラのステレオ視を用いたジェスチャ認識システムと組み合わせて、腰に装着した加速度センサ4a,4aからの加速度では判別し難い動作(例えば、任意の姿勢で静止した状態で首振り、手振り、指差し等のジェスチャ)を判別して、画像解析に基づいて判別された動作の推移と加速度に基づいて判別された動作の推移とを組み合わせた行動を判別することも可能である。この場合、例えば、寝た状態で動けなくなった対象者(例えば、寝たきりの患者や、転倒で怪我をして起き上がれなくなった人等)がカメラに向かって手を振って救助を求めていることを判別したり、ジェスチャに応じて家電製品等を制御したりすることが可能となる。
【0108】
(H08)前記実施例1では、各センサタグ4,4に1個の加速度センサ4a,4aを設けて加速度データを送信したが、各センサタグ4,4に設ける加速度センサの数については1個に限定されず、対象者の異なる部位の加速度を検出する複数の加速度センサを各センサタグ4,4に設けることも可能である。例えば、腰に装着した各センサタグ4,4と有線で接続されて対象者の胸に貼り付けられる胸用の加速度センサを増設することも可能である。この場合、腰と胸の加速度センサ4aからの各加速度に基づいて、各メンバシップ値STAND〜RUNが演算できるように対象者のメンバシップ関数f1〜f13や動作コンテキストc1〜c3を設定する必要がある。
【0109】
(H09)前記実施例1では、アクセスポイント3,3とサーバ2とが無線LAN5によって接続されていたが、これに限定されず、例えば、インターネットや、有線LAN、携帯電話網5′等の移動体通信網、アドホックネットワーク(自律分散型無線通信網、自律分散型無線ネットワーク、自立分散型無線ネットワーク)、専用回線等の情報通信回線で接続することも可能である。また、センサタグ4,4とアクセスポイント3,3とがZigBee(登録商標)ネットワーク6によって接続されていたが、これに限定されず、例えば、携帯電話網5′等の移動体通信網、アドホックネットワーク、Bluetooth(登録商標)等のその他の無線通信技術により接続することも可能である。また、前記実施例2では、携帯端末4′,4′とサーバ2とが携帯電話網5′によって接続されていたが、これに限定されず、例えば、無線LAN5、アドホックネットワーク、Bluetooth(登録商標)等のその他の無線通信技術により接続することも可能である。
【0110】
(H010)前記実施例1では、各アクセスポイント3,3を各室内に配置していたが、これに限定されず、アクセスポイントIDの異なる複数台のアクセスポイントを室内に配置することも可能である。この場合、例えば、RSSI値に基づいて、センサタグから最も近いアクセスポイントが転送した情報で行動認識することが可能である。また、例えば、RSSI値に基づく各距離で室内のどの位置(座標)に対象者が存在するかを判別することも可能である。
(H011)前記実施例では、50[ms]ごとに加速度データを検出したが、加速度データを検出する周期については任意に変更可能である。
(H012)前記実施例1では、アクセスポイント4からサーバ2に対して、加速度データや、センサタグID、アクセスポイントID、RSSI値を含む情報を送信したが、これに限定されず、例えば、センサタグ4から受信したバッテリ残量の情報についても送信可能である。この場合、サーバ2でセンサタグ4のバッテリ残量を監視することが可能となる。
【0111】
(H013)前記実施例のように、対象者ごとにメンバシップ関数f1〜f13や動作コンテキストc1〜c3を設定、記憶して対象者の動作を精度良く判別することが好ましいが、例えば、万人に適用可能なメンバシップ関数f1〜f13や動作コンテキストc1〜c3を1つだけ設定、記憶したり、性別の体格差に応じて設定、記憶したり、身長・体重等の体格モデルに応じて設定、記憶したりして対象者の動作を判別することも可能である。
(H014)前記実施例では、3軸の加速度ベクトルa1〜a50に基づく分散σ2や差分Δaと各メンバシップ値STOP,MOVE,WALK,RUNとを対応付ける各メンバシップ関数f12,f13を設定、記憶して対象者の動作を判別したが、これに限定されず、例えば、前後方向への「移動」や「転倒」等のみを判別する場合には、X軸方向の加速度ax1〜ax50に基づく分散(σx2)や差分(Δax)と各メンバシップ値STOP,MOVE,WALK,RUNとを対応付ける各メンバシップ関数(fx12),(fx13)を設定、記憶して対象者の動作を判別することも可能である。
【0112】
(H015)前記実施例の前記行動判別処理(図10参照)では、「転倒」を判別する場合に、20秒以上連続する動作が変化した際の直前の2.5秒間に「移動」且つ「強」であるか否かを判別することにより、加速度の急激な変化があったか否かを判別したが、例えば、変化する直前の加速度の急激な変化をさらに詳細に解析するために、分散σ2が分散閾値(例えば、0.2)を超えるか否かを判別したり、差分Δaが差分閾値(例えば、2)を超えるか否かを判別したりすることも可能である。また、例えば、「転倒」を判別する場合であっても、「寝返り」や「離床(起床)」を判別する場合と同様に、20秒以上連続する動作が変化したか否かのみ判別して、直前の加速度の急激な変化を判別条件とせずに対象者の行動を判別することも可能である。また、前記実施例では、「寝返り」や「離床(起床)」を判別する場合に、加速度の変化については判別条件としていないが、これに限定されず、「転倒」を判別する場合と同様に、加速度の変化を解析して判別条件に追加とすることも可能である。
【0113】
(H016)前記実施例では、判別された対象者の動作の推移や行動を記録したり、動作の推移や行動を行動表示画像101に表示したり、行動を通報したりしたが、判別された対象者の動作や行動の利用方法についてはこれに限定されず、例えば、判別された対象者の動作や行動に応じて、ロボットを制御することも可能である。この場合、例えば、ロボット機器を制御するソフトウエアモジュールの規格群であるRTミドルウェア(RT-middleware、RT:Robotics Technologies)を介して、ロボットに対象者の動作や行動に応じた動作や行動や挨拶や対話をさせたり、異常事態等が発生した場合にロボットから通報や呼びかけ等をさせたりすることも可能である。また、例えば、大量のデータからパターン認識等の技術で知識を抽出する技術であるデータマイニング(Data mining)によって、記憶した対象者の動作や行動のパターン(属性)等を解析して、複数の対象者をグループ化したり、各対象者の要求に合致したサービスを提案することに利用したりすることも可能である。この場合、行動量を抽出するために、例えば、端末(センサタグ4や携帯端末4′)に行動量計を設けて行動量計が測定した行動量データを送受信したり、記憶した動作の推移等に基づいて行動量を演算したりする構成が必要となる。なお、RTミドルウェアについては、例えば、特開2007−193736号公報等に記載されており、データマイニングについては、例えば、特開2007−257335号公報等に記載されており、それぞれ公知である。
【0114】
(H017)前記実施例において、予め設定された各数値(例えば、RSSI値の−128[dBm]や+128[dBm]、アクセスポイント3,3の受信可能な半径約30[m]、加速度ベクトルa1〜a50の直前50[個]や17[個]、各動作コンテキストc1〜c3の20[秒]や2.5[秒]、行動表示手段C13の1時間等)については任意の数値に変更することが可能である。
(H018)前記実施例2のように、携帯端末4′,4′から定期的に記憶した情報(加速度データ、判別された動作、行動等)をサーバ2に転送する構成では、携帯端末4′,4′が転送済みの情報を削除することも可能である。この場合、携帯端末4′,4′において、行動認識プログラムAP1′に関する記憶容量を低減することができ、小型である替わりに記憶容量が少ない記憶媒体を選択して携帯端末4′,4′全体を小型化することができる。
【0115】
(H019)前記実施例2のように、携帯端末4′,4′から定期的に記憶した情報(加速度データ、判別された動作、行動等)をサーバ2に転送する構成が記憶容量やバックアップの観点からは好ましいが、サーバ2を省略して、行動を認識した場合にのみ通報する構成とすることも可能である。すなわち、動作の推移や行動のログをサーバ2に転送しない構成も可能である。この場合、サーバ2と携帯端末4′,4′との間の情報の送受信(携帯電話網3)が省略されるため、行動認識システム1′の通信負荷を低減できる。
(H020)前記実施例2では、携帯端末4′,4′によって対象者の動作や行動を認識したが、携帯端末4′,4′は行動認識用の専用端末に限定されず、例えば、GPS機能付き携帯電話やスマートフォンやタブレットPC等によって構成することも考えられる。
(H021)前記実施例2では、GPS受信機4b,4bがGPS衛星から受信した情報から位置データ(位置情報)を演算したが、携帯端末4′,4′で位置データを取得する方法についてはこれに限定されず、例えば、携帯電話網5′の基地局から受信する情報に基づいて位置データを演算することも可能である。
【符号の説明】
【0116】
σ2…分散、Δa…差分、4a,4a…加速度センサ、2…コンピュータ、行動認識用の処理装置、(4,4),(4′,4′)…端末、行動認識用の端末、AP1,AP1′…行動認識プログラム、a1〜a50…加速度ベクトル、ax〜az…加速度、CS2…送信手段、C1:特定手段、C2…受信手段、C4A…姿勢情報記憶手段、C7…動作判別手段、C8…動作推移記憶手段、C9…行動情報記憶手段、C10…行動判別手段。
【技術分野】
【0001】
本発明は、人間の行動を認識するための行動認識プログラム、行動認識用の端末および行動認識用の処理装置に関する。
【背景技術】
【0002】
従来より、コンピュータ等によって人間の動作を自動的に判別する技術として、例えば、以下の特許文献1〜3の技術が公知である。
【0003】
特許文献1としての特開2009−37434号公報や、特許文献2としての特開2009−211563号公報には、2台のカメラによってユーザをステレオ視し、ユーザの肌色部分として抽出された顔領域および手先領域の3次元位置を追跡することにより、上下左右への手振り動作を判別したり、テレビ等に視線と指とを向ける指差し動作を判別したりする技術が記載されている。
また、特許文献3としての特開2008−102781号公報には、2台のカメラによってユーザをステレオ視し、ユーザの肌色部分として抽出された手先領域の3次元位置の変化に基づいて、ユーザの手の動きの大きさや速度を計算する技術が記載されている。また、特許文献3には、ユーザの顔領域も抽出し、ファジー推論によって、抽出された顔と手との位置関係と計算された手の動きの大きさと速度とから、ユーザが健常者であるか白杖者(視覚障害者)であるかを判別する技術が記載されている。
すなわち、特許文献1〜3には、カメラを用いて人間の動作を自動的に判別する技術が記載されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2009−37434号公報(「0030」〜「0053」、図1〜図6)
【特許文献2】特開2009−211563号公報(「0025」〜「0036」、図1〜図6)
【特許文献3】特開2008−102781号公報(「0013」〜「0065」、図1〜図12)
【発明の概要】
【発明が解決しようとする課題】
【0005】
(従来技術の問題点)
特許文献1〜3に記載の技術では、両方のカメラの撮像範囲内に、撮像対象(ユーザの顔や手)が存在する必要があり、撮像対象がいずれか1つのカメラの撮像範囲外、すなわち、死角に移動してしまった場合、撮像対象の3次元位置が計算できないため、ユーザの動作が判別できなくなるという問題がある。また、例えば、ユーザがカメラに背を向けたり、屈み込んだりした場合、撮像対象の全部または一部が隠れて撮像し難くなる。よって、特許文献1〜3に記載の技術では、ユーザの身体の向きや姿勢によってユーザの動作が判別し難くなるという問題があった。また、例えば、朝、昼、夜の室内の明るさが異なる場合、撮像対象の追跡精度が低下したり、追跡できなくなったりする可能性がある。特に、室内の照明を暗くした場合には、追跡できなくなるという問題があった。
この結果、特許文献1〜3に記載の技術では、ユーザの動作を判別できなくなる場合があり、判別できた場合であっても判別結果の精度が低下するおそれがあった。また、特許文献1〜3に記載の技術では、昼夜の明るさが大きく変化する室外ではユーザの動作を判別し続けることが困難であるという問題があった。
【0006】
また、近年、核家族化が進み、独り住まいの高齢者が増加したため、高齢者の転倒等の事故や体調不良等の確認を遠隔地から行いたいとの社会的要求が大きくなってきている。しかしながら、特許文献1〜3に記載の技術では、判別対象のユーザの動作は、対応する家電機器等の操作を実行するためのジェスチャ(手振り、指差し等)等の一時的な姿勢の判別だけで、転倒や起床せずに寝たまま等の異常・緊急性を要し、訪問・確認や早期救急救助が必要な行動の判別は実現できていないという問題があった。
【0007】
前述の事情に鑑み、本発明は、人間の動作の判別ミスを低減し易くしつつ人間の動作の連続性から判別可能な行動を認識することを技術的課題とする。
【課題を解決するための手段】
【0008】
前記技術的課題を解決するために、請求項1に記載の発明の行動認識プログラムは、
コンピュータを、
人が携帯可能な端末に設けられて加速度を検出可能な加速度センサで検出される加速度と、前記端末を携帯した人の姿勢と、を対応づける情報が予め記憶された姿勢情報記憶手段、
前記加速度センサで検出された加速度と、前記姿勢情報記憶手段に記憶された情報とに基づいて、前記端末を携帯した人の動作を判別する動作判別手段、
前記動作の推移を記憶する動作推移記憶手段、
前記動作の推移と、前記端末を携帯した人の行動と、を対応づける情報が予め記憶された行動情報記憶手段、
前記動作の推移と前記行動情報記憶手段に記憶された情報とに基づいて、前記端末を携帯した人の行動を判別する行動判別手段、
として機能させる。
【0009】
請求項2に記載の発明は、請求項1に記載の行動認識プログラムにおいて、
前記動作判別手段は、直交する3軸のそれぞれの方向の加速度を検出する前記加速度センサで検出された加速度に基づいて、前記端末を携帯した人の姿勢を判別すると共に、加速度ベクトルの分散に基づいて、前記端末を携帯した人の静止および移動のいずれかを判別し、且つ、前記加速度センサで検出された加速度ベクトルの最大値と最小値との差分に基づいて、前記端末を携帯した人の動作の激しさを判別し、前記姿勢と、静止または移動と、動作の激しさと、に基づいて、前記端末を携帯した人の動作を判別する、
ことを特徴とする。
【0010】
請求項3に記載の発明は、請求項1または2に記載の行動認識プログラムにおいて、
前記端末に設けられた送信手段から無線送信された加速度の情報を受信する受信手段、
を備えたことを特徴とする。
【0011】
請求項4に記載の発明は、請求項1ないし3のいずれかに記載の行動認識プログラムにおいて、
前記端末を識別する識別情報に基づいて、前記端末を携帯した人を特定する特定手段、
を備えたことを特徴とする。
【0012】
前記技術的課題を解決するために、請求項5に記載の発明の行動認識用の端末は、
加速度を検出可能な加速度センサを備え、人が携帯可能な行動認識用の端末であって、
前記加速度センサで検出される加速度と前記端末を携帯した人の姿勢とを対応づける情報が予め記憶された姿勢情報記憶手段と、前記加速度センサで検出された加速度と前記姿勢情報記憶手段に記憶された情報とに基づいて、前記端末を携帯した人の動作を判別する動作判別手段と、前記動作の推移を記憶する動作推移記憶手段と、前記動作の推移と前記端末を携帯した人の行動とを対応づける情報が予め記憶された行動情報記憶手段と、前記動作の推移と前記行動情報記憶手段に記憶された情報とに基づいて、前記端末を携帯した人の行動を判別する行動判別手段と、を有する行動認識用の処理装置との間で、情報の送受信が可能である
ことを特徴とする。
【0013】
前記技術的課題を解決するために、請求項6に記載の発明の行動認識用の処理装置は、
加速度を検出可能な加速度センサを備え、人が携帯可能な端末との間で情報の送受信が可能な行動認識用の処理装置であって、
前記加速度センサで検出される加速度と前記端末を携帯した人の姿勢とを対応づける情報が予め記憶された姿勢情報記憶手段と、
前記加速度センサで検出された加速度と前記姿勢情報記憶手段に記憶された情報とに基づいて、前記端末を携帯した人の動作を判別する動作判別手段と、
前記動作の推移を記憶する動作推移記憶手段と、前記動作の推移と前記端末を携帯した人の行動とを対応づける情報が予め記憶された行動情報記憶手段と、
前記動作の推移と前記行動情報記憶手段に記憶された情報とに基づいて、前記端末を携帯した人の行動を判別する行動判別手段と、
を備えたことを特徴とする。
【0014】
なお、前記技術的課題を解決するための行動認識方法として、
人が携帯可能な端末に設けられて加速度を検出可能な加速度センサで検出される加速度と、前記加速度と前記端末を携帯した人の姿勢とが予め対応づけられた情報とに基づいて、前記端末を携帯した人の動作を判別する動作判別ステップと、
前記動作の推移と、前記動作の推移と前記端末を携帯した人の行動とが予め対応づけられた情報と、に基づいて、前記端末を携帯した人の行動を判別する行動判別ステップと、
を実行することも可能である。
【発明の効果】
【0015】
請求項1に記載の発明によれば、加速度センサで検出された加速度に基づいて端末を携帯した人の行動を判別する構成を有しない場合に比べ、人間の動作の判別ミスを低減しつつ人間の動作の連続性から判別可能な行動を認識することができる。
【0016】
請求項2に記載の発明によれば、加速度センサで検出された加速度に基づく姿勢と、加速度ベクトルの分散に基づく静止または移動と、加速度ベクトルの最大値と最小値との差分に基づく動作の激しさとに基づいて、端末を携帯した人の動作を判別できる。
請求項3に記載の発明によれば、端末から無線送信された加速度の情報に基づいて、端末を携帯した人の動作や行動を判別できる。
請求項4に記載の発明によれば、端末を携帯した人が複数存在する場合に、識別情報に基づいて、動作した人を特定することができる。
【0017】
請求項5、6に記載の発明によれば、行動認識用の端末の加速度センサで検出された加速度に基づいて行動認識用の処理装置で行動認識用の端末を携帯した人の行動を判別する構成を有しない場合に比べ、人間の動作の判別ミスを低減しつつ人間の動作の連続性から判別可能な行動を認識することができる。
【図面の簡単な説明】
【0018】
【図1】図1は実施例1の行動認識システムの全体説明図である。
【図2】図2は実施例1の行動認識システムのサーバとアクセスポイントとセンサタグとの各制御部が備えている各機能をブロック図(機能ブロック図)で示した図である。
【図3】図3は実施例1のメンバシップ関数の一例の説明図であって、センサタグを腰の位置に装着した対象者のメンバシップ関数の説明図であり、図3Aは縦軸をメンバシップ値とし横軸をX軸加速度とした場合の立位・座位・臥位の各メンバシップ関数の説明図、図3Bは縦軸をメンバシップ値とし横軸をY軸加速度とした場合の臥位(左向き)・臥位(右向き)・臥位(左右の向きなし)の各メンバシップ関数の説明図、図3Cは縦軸をメンバシップ値とし横軸をZ軸加速度とした場合の臥位(うつ伏せ)・臥位(仰向け)・臥位(前後の向きなし)の各メンバシップ関数の説明図、図3Dは縦軸をメンバシップ値とし横軸を加速度ベクトルの分散とした場合の静止・移動の各メンバシップ関数の説明図、図3Eは縦軸をメンバシップ値とし横軸を加速度ベクトルの最小値と最大値との差分とした場合の歩行・走行の各メンバシップ関数の説明図である。
【図4】図4は実施例1のメンバシップ関数を設定する際に対象者から取得した各動作の加速度データと連続画像と時系列で照合する作業に関する一例の説明図であり、対象者が前方に転倒した際の各動作の画像と縦軸を加速度とし横軸を時間とした場合の3軸の加速度データとを照合する作業の概念説明図である。
【図5】図5は縦軸を加速度とし横軸を時間とした場合の3軸の加速度データの説明図であり、図5Aは対象者が左向き・うつ伏せ・左向き・仰向けの順に寝返りした際の加速度データの一例の説明図、図5Bは対象者が仰向けの状態から膝を立てて床を肘や手で支えながら上体を起こして離床した際の加速度データの一例の説明図である。
【図6】図6は実施例1の行動表示画像の説明図である。
【図7】図7は実施例1の動作推移記憶処理のフローチャートである。
【図8】図8は実施例1の動作判別処理のフローチャートであり、図7のST105のサブルーチンの説明図である。
【図9】図9は実施例1の行動認識処理のフローチャートである。
【図10】図10は実施例1の行動判別処理のフローチャートであり、図9のST202のサブルーチンの説明図である。
【図11】図11は実施例1の図1に対応する説明図であって実施例2の行動認識システムの全体説明図である。
【図12】図12は実施例1の図2に対応する説明図であって実施例2の行動認識システムのサーバと携帯端末との各制御部が備えている各機能をブロック図(機能ブロック図)で示した図である。
【図13】図13は実施例1の図7に対応する説明図であって実施例2の動作推移記憶処理のフローチャートである。
【発明を実施するための形態】
【0019】
次に図面を参照しながら、本発明の実施の形態の具体例(以下、実施例と記載する)を説明するが、本発明は以下の実施例に限定されるものではない。
【実施例1】
【0020】
図1は実施例1の行動認識システムの全体説明図である。
図1において、実施例1の行動認識システム1は、行動認識用の処理装置の一例としてのサーバ2を有する。実施例1の前記サーバ2は、コンピュータ装置により構成されており、コンピュータ本体2aと、ディスプレイ2bと、キーボード2cやマウス2d等の入力装置、図示しないハードディスクドライブ等により構成されている。
【0021】
また、前記行動認識システム1は、行動認識の対象者(端末を携帯した人、例えば、老人ホームの老人や病院の患者等)が居住する室内(例えば、老人ホームの各部屋)に配置されたアクセスポイント(転送部材、端末位置検出部材)3,3と、前記対象者が携帯するセンサタグ(端末、行動認識用の端末)4,4とを有する。実施例1では、前記アクセスポイント3,3は、第1の情報通信回線の一例としての無線LAN(Local Area Network)5を介して、前記サーバ2に接続されており、前記センサタグ4,4は、第2の情報通信回線の一例としてのZigBee(登録商標)ネットワーク6を介して、前記アクセスポイント3,3と接続されている。
ここで、ZigBee(登録商標)とは、センサネットワークとして利用することを想定して開発された家電向けの短距離無線通信規格の一つであり、低速で情報の送受信の範囲が狭い替わりに、他の無線通信規格の端末に比べて安価で消費電力が少ないという特徴を有している。
【0022】
実施例1の前記アクセスポイント3,3は、センサタグ4,4からの受信可能な範囲が半径約30[m]に予め設定されている。また、実施例1では、各部屋の広さは、縦の長さが約8[m]、横の長さが約6[m]に予め設定されている。よって、前記センサタグ4,4は、室内の全ての位置から前記アクセスポイント3,3に情報が送信可能となっており、実施例1のアクセスポイント3,3は各部屋の一角に1台ずつ配置されている。
また、実施例1の前記センサタグ4,4は、一例として、図示しないフックでベルトのバックル部分に引っ掛ける等して各対象者の腰の位置に装着されており、直交する3軸のそれぞれの方向の加速度を検出する加速度センサ(3軸加速度センサ)4a,4aを有する。
【0023】
実施例1の加速度センサ4a,4aは、50[ms]ごとに対象者についてのX軸方向(上下方向)、Y軸方向(左右方向)、Z軸方向(前後方向)の各加速度(X軸加速度ax、Y軸加速度ay,Z軸加速度az)を、−2.0625[G:9.80665m/s2]から+2.0625[G]までの値で検出する。すなわち、−2.0625≦ax≦+2.0625,−2.0625≦ay≦+2.0625,−2.0625≦az≦+2.0625が成立する。なお、実施例1では、X軸方向については、上方向がプラス方向(+)、下方向がマイナス方向(−)に予め設定されている。また、Y軸方向については、右方向がプラス方向、左方向がマイナス方向に予め設定されている。また、Z軸方向については、前方向がプラス方向、後方向がマイナス方向に予め設定されている。
よって、例えば、対象者が静止している場合、1[G]の重力加速度が下向きに働くため、直立していれば、ax=−1[G]、ay=az=0[G]となる加速度ax〜azが検出される。また、例えば、対象者が左向きで寝ている状態で静止していれば、ay=−1[G]、az=ax=0[G]となる加速度ax〜azが検出され、対象者がうつ伏せで寝ている状態で静止していれば、az=+1[G]、ax=ay=0[G]となる加速度ax〜azが検出される。
【0024】
(実施例1の制御部の説明)
(実施例1のセンサタグ4,4の制御部の説明)
図2は実施例1の行動認識システムのサーバとアクセスポイントとセンサタグとの各制御部が備えている各機能をブロック図(機能ブロック図)で示した図である。
図2において、前記センサタグ4,4の制御部は、外部との信号の入出力等を行う入出力インターフェース(I/O)、必要な処理を行うためのプログラムおよび情報等が記憶されたROM(リードオンリーメモリ)、必要なデータを一時的に記憶するためのRAM(ランダムアクセスメモリ)、前記ROMに記憶されたプログラムに応じた処理を行うCPU(中央演算処理装置)、ならびに発振器等を有する小型情報処理装置、いわゆる、マイクロコンピュータにより構成されており、前記ROMに記憶されたプログラムを実行することにより種々の機能を実現することができる。
【0025】
(実施例1のセンサタグ4,4の制御部に接続された信号出力要素)
前記センサタグ4,4の制御部は、加速度センサ4a,4a等の信号出力要素からの出力信号が入力されている。前記加速度センサ4a,4aは、50[ms]ごとに3軸の各方向の加速度ax〜azを検出する。
(実施例1のセンサタグ4,4の制御部の機能)
前記センサタグ4,4の制御部は、前記信号出力要素からの入力信号に応じた処理を実行する以下の機能を有している。
CS1:端末情報記憶手段(識別情報記憶手段、センサタグID記憶手段、端末識別情報記憶手段)
端末情報記憶手段CS1は、センサタグ4,4ごとに予め設定されたセンサタグID(識別情報、端末情報、端末識別情報)を記憶する。
CS2:送信手段
送信手段CS2は、前記端末情報記憶手段CS1に記憶されたセンサタグIDを送信する端末情報送信手段CS2Aを有し、加速度センサ4a,4aによって検出された加速度ax〜azの情報である加速度データ(加速度の情報)を送信する。実施例1の前記送信手段CS2は、いわゆる、ZigBee(登録商標)モジュール(ZigBee(登録商標)チップ、ZigBee(登録商標)送受信機)によって構成された図示しない送信部を介して、検出された加速度データと、記憶されたセンサタグIDと含む情報を50[ms]ごとにアクセスポイント3,3に送信(無線送信)する。
【0026】
(実施例1のアクセスポイント3,3の制御部の説明)
(実施例1のアクセスポイント3,3の制御部の機能)
また、前記アクセスポイント3,3の制御部は、前記センサタグ4,4の制御部と同様のマイクロコンピュータにより構成されており、以下の機能を有している。
CA1:転送情報記憶手段(アクセスポイントID記憶手段、転送部材識別情報記憶手段)
転送情報記憶手段CA1は、アクセスポイント3,3ごとに予め設定されたアクセスポイントID(転送情報、転送部材識別情報)を記憶する。
【0027】
CA2:転送手段
転送手段CA2は、転送用受信手段CA2Aと、信号強度検出手段CA2Bと、転送用送信手段CA2Cとを有し、前記送信手段CS2によって送信された情報をサーバ2に転送する。
CA2A:転送用受信手段
転送用受信手段CA2Aは、前記ZigBee(登録商標)モジュールによって構成された図示しない受信部を介して、前記送信手段CS2によって送信された加速度データとセンサタグIDとを含む情報を受信する。
【0028】
CA2B:信号強度検出手段
信号強度検出手段C2A2Bは、前記転送用受信手段CA2Aによって受信した情報の受信信号の強度である受信信号強度(RSSI:Received Signal Strength Indicator)の値であるRSSI値を検出する。実施例1の前記信号強度検出手段CA2Bは、受信信号のRSSI値を、−128[dBm:デービーエム]から+128[dBm]までの値で検出する。なお、「dBm」とは、基準値である1[mW]に対する受信信号の電力のレベル表現の値(比の常用対数の10倍)のことをいう。例えば、1[mW]は、10×log10((1×10−3)/(1×10−3))=0[dBm]、30[mW]は、10×log10((30×10−3)/(1×10−3))≒14.8[dBm]、0.1[mW]は、10×log10((0.1×10−3)/(1×10−3))=−10[dBm]となる。
CA2C:転送用送信手段
転送用送信手段CA2Cは、前記転送情報記憶手段CA1に記憶されたアクセスポイントIDと前記信号強度検出手段CA2Bによって検出されたRSSI値とを送信する端末位置送信手段CA2C1を有し、いわゆる、無線LANモジュール(無線LAN送受信機)によって構成された図示しない送信部を介して、前記転送用受信手段CA2Aによって受信した前記情報とアクセスポイントIDとRSSI値とを含む情報をサーバ2に送信する。
【0029】
(実施例1のサーバ2の制御部の説明)
また、前記サーバ2のコンピュータ本体2aの制御部は、I/O、ROM、RAM、CPU、クロック発振器等を有し、前記構成のサーバ2は、ハードディスクドライブやROM等に記憶されたプログラムを実行することにより種々の機能を実現することができる。
前記制御部には、基本動作を制御する基本ソフト、いわゆる、オペレーティングシステムOS、アプリケーションプログラムとしての行動認識プログラムAP1、その他の図示しないソフトウェアが記憶されている。
【0030】
(実施例1の行動認識プログラムAP1の説明)
前記行動認識プログラムAP1は、下記の機能手段(プログラムモジュール)を有する。
C1:特定手段(端末情報特定手段、センサタグID特定手段、端末識別情報特定手段)
特定手段C1は、センサタグIDに基づいて、センサタグ4,4を携帯した対象者を特定する。
【0031】
C2:受信手段
受信手段C2は、前記端末情報送信手段CS2Aから送信されたセンサタグIDを受信する端末情報受信手段C2Aと、前記端末位置送信手段CA2C1から送信されたアクセスポイントIDとRSSI値とを受信する端末位置受信手段C2Bとを有し、前記送信手段CS2から送信された加速度データを受信する。実施例1の前記受信手段C2は、前記転送用送信手段CA2Cから転送された前記情報(加速度データ、センサタグID、アクセスポイントID、RSSI値を含む情報)を受信する。
C3:受信情報記憶手段
受信情報記憶手段C3は、前記受信手段C2から前記情報を受信した時期(タイムスタンプ)を記憶する受信時期記憶手段(タイムスタンプ記憶手段)C3Aを有し、前記受信手段C2によって受信した前記情報と時期とを対応付けて記憶する。すなわち、実施例1の前記受信情報記憶手段C3には、受信した時期ごとに、加速度データ、センサタグID、アクセスポイントID、RSSI値が対応付けられて記憶される。
【0032】
図3は実施例1のメンバシップ関数の一例の説明図であって、センサタグを腰の位置に装着した対象者のメンバシップ関数の説明図であり、図3Aは縦軸をメンバシップ値とし横軸をX軸加速度とした場合の立位・座位・臥位の各メンバシップ関数の説明図、図3Bは縦軸をメンバシップ値とし横軸をY軸加速度とした場合の臥位(左向き)・臥位(右向き)・臥位(左右の向きなし)の各メンバシップ関数の説明図、図3Cは縦軸をメンバシップ値とし横軸をZ軸加速度とした場合の臥位(うつ伏せ)・臥位(仰向け)・臥位(前後の向きなし)の各メンバシップ関数の説明図、図3Dは縦軸をメンバシップ値とし横軸を加速度ベクトルの分散とした場合の静止・移動の各メンバシップ関数の説明図、図3Eは縦軸をメンバシップ値とし横軸を加速度ベクトルの最大値と最小値との差分とした場合の歩行・走行の各メンバシップ関数の説明図である。
図4は実施例1のメンバシップ関数を設定する際に対象者から取得した各動作の加速度データと連続画像と時系列で照合する作業に関する説明図であり、対象者が前方に転倒した際の各動作の画像と縦軸を加速度とし横軸を時間とした場合の3軸の加速度データとを照合する作業の概念説明図である。
【0033】
C4:動作情報記憶手段
動作情報記憶手段C4は、姿勢情報記憶手段C4Aと、静動情報記憶手段C4Bと、強弱情報記憶手段C4Cとを有し、前記受信情報記憶手段C3に記憶された加速度データと、対象者の動作とを対応づける情報としての動作情報を記憶する。実施例1の前記動作情報記憶手段C4は、前記動作情報として、図3に示す、ファジィ推論(Fuzzy Inference)に用いるメンバシップ関数(Membership function)(f1〜f13)を記憶する。具体的には、各加速度ax〜azから後述する各メンバシップ値(STAND,SIT,LIE,LIE_LEFT,LIE_RIGHT,NOT_LIE_LR,LIE_FRONT,LIE_BACK,NOT_LIE_FB,STOP,MOVE,WALK,RUN)を演算するための情報(例えば、メンバシップ関数の定数や、メンバシップ値設定テーブル等)をセンサタグIDと対応付けて記憶する。
すなわち、実施例1の前記動作情報記憶手段C4は、センサタグIDに応じて、対象者ごとに各メンバシップ関数(f1〜f13)を記憶する。
【0034】
なお、ファジィ推論やメンバシップ関数に関する詳細な説明については、例えば、特許文献3等に記載されており、公知であるため、詳細な説明については省略する。
また、図3に示す実施例1の各メンバシップ関数(f1〜f13)は、図4に示すように、センサタグ4を装着した対象者をカメラで撮影しながら、対象者に判別対象の各動作を21回ずつ予め実行してもらい、取得した「立位」、「座位」、前後左右に向いた「臥位」、「歩行」、「走行」の8種類の各動作の21個のサンプルについて、それぞれ加速度データと動画とを時系列で照合することによって予め設定されている。
【0035】
C4A:姿勢情報記憶手段
姿勢情報記憶手段C4Aは、前記受信情報記憶手段C3に記憶された加速度データと、対象者の姿勢とを対応づける情報としての姿勢情報を記憶する。実施例1では、対象者の姿勢の一例として、立っている状態である「立位」、座っている状態である「座位」、寝ている状態である「臥位」が予め設定されている。ここで、静止している場合の「立位」、「座位」、「臥位」については、X軸加速度axに基づいて判別可能である。例えば、「立位」ならばax≒−1[G]となり、「臥位」ならばax≒0[G]となり、「座位」ならば上体が前か後に傾いた状態になり易く、上体の傾きによってX軸加速度axが−1[G]から0[G]までの間の値が検出される。よって、図3Aに示すように、X軸加速度axに基づいて、X軸加速度axと「立位」、「座位」、「臥位」の各メンバシップ値(確率変数)STAND,SIT,LIE(0≦STAND≦1,0≦SIT≦1,0≦LIE≦1)とを対応づける「立位」、「座位」、「臥位」の各メンバシップ関数f1,f2,f3を設定できる。
【0036】
具体的には、図3Aに示すように、「立位」のメンバシップ関数f1の一例として、ax≦−0.8の場合にSTAND=1となり、−0.8<ax<−0.6の場合にSTAND=−5(ax)−3となり、−0.6≦axの場合にSTAND=0となる関数が設定できる。また、「座位」のメンバシップ関数f2の一例として、ax≦−0.8の場合にSIT=0となり、−0.8<ax<−0.6の場合にSIT=5(ax)+4となり、−0.6≦ax≦−0.4の場合にSIT=1となり、−0.4<ax<−0.2の場合にSIT=−5(ax)−1となり、−0.2≦axの場合にSIT=0となる関数が設定できる。また、「臥位」のメンバシップ関数f3の一例として、ax≦−0.4の場合にLIE=0となり、−0.4<ax<−0.2の場合にLIE=5(ax)+2となり、−0.2≦axの場合にLIE=1となる関数が設定できる。
よって、X軸加速度axに応じた各メンバシップ値STAND〜LIEの和(STAND+SIT+LIE)が1に設定されている(f1(ax)+f2(ax)+f3(ax)=1)。また、ax≦−0.8,−0.6<ax≦−0.4,−0.2≦axで各メンバシップ値STAND,SIT,LIEがそれぞれ1に設定され、−0.8<ax<−0.6が各メンバシップ値STAND,SITの0から1への境界部に設定され、−0.4<ax<−0.2が各メンバシップ値SIT,LIEの0から1への境界部に設定されている。
【0037】
また、実施例1では、静止している場合の「臥位」の前後左右の向きについては、Y軸加速度ay,azに基づいて判別可能である。例えば、左向きならばay≒−1[G]となり、右向きならばay≒+1[G]となり、前向き、すなわち、うつ伏せならばaz≒+1[G]となり、後向き、すなわち、仰向けならばaz≒−1[G]が検出される。よって、図3Bに示すように、Y軸加速度ayに基づいて、Y軸加速度ayと「臥位(左向き)」、「臥位(右向き)」、「臥位(左右の向きなし)」の各メンバシップ値LIE_LEFT,LIE_RIGHT,NOT_LIE_LR(0≦LIE_LEFT≦1,0≦LIE_RIGHT≦1,0≦NOT_LIE_LR≦1)とを対応づける「臥位(左向き)」、「臥位(右向き)」、「臥位(左右の向きなし)」の各メンバシップ関数f4,f5,f6を設定できる。また、図3Cに示すように、Z軸加速度azに基づいて、Z軸加速度azと「臥位(うつ伏せ)」、「臥位(仰向け)」、「臥位(前後の向きなし)」の各メンバシップ値LIE_FRONT,LIE_BACK,NOT_LIE_FB(0≦LIE_FRONT≦1,0≦LIE_BACK≦1,0≦NOT_LIE_FB≦1)とを対応づける「臥位(うつ伏せ)」、「臥位(仰向け)」、「臥位(前後の向きなし)」の各メンバシップ関数f7,f8,f9を設定できる。
【0038】
具体的には、図3Bに示すように、「臥位(左向き)」のメンバシップ関数f4の一例としてay≦−0.6の場合にLIE_LEFT=1となり、−0.6<ay<−0.4の場合にLIE_LEFT=−5(ay)−2となり、−0.4≦ayの場合にLIE_LEFT=0となる関数が設定できる。また、「臥位(右向き)」のメンバシップ関数f5の一例として、ay≦0.4の場合にLIE_RIGHT=0となり、0.4<ay<0.6の場合にLIE_RIGHT=5(ay)−2となり、0.6≦ayの場合にLIE_RIGHT=1となる関数が設定できる。また、「臥位(左右の向きなし)」のメンバシップ関数f6の一例として、ay≦−0.6の場合にNOT_LIE_LR=0となり、−0.6<ay<−0.4の場合にNOT_LIE_LR=5(ay)+3となり、−0.4≦ay≦0.4の場合にNOT_LIE_LR=1となり、0.4<ay<0.6の場合にNOT_LIE_LR=−5(ay)+3となり、0.6≦ayの場合にNOT_LIE_LR=0となる関数が設定できる。
よって、Y軸加速度ayに応じた各メンバシップ値LIE_LEFT〜NOT_LIE_LRの和(LIE_LEFT+LIE_RIGHT+NOT_LIE_LR)が1に設定されている(f4(ay)+f5(ay)+f6(ay)=1)。また、ay≦−0.6,−0.4≦ay≦0.4,0.6≦ayで各メンバシップ値LIE_LEFT,NOT_LIE_LR,LIE_RIGHTがそれぞれ1に設定され、−0.6<ay<−0.4が各メンバシップ値LIE_LEFT,NOT_LIE_LRの0から1への境界部に設定され、0.4<ay<0.6が各メンバシップ値NOT_LIE_LR,LIE_RIGHTの0から1への境界部に設定されている。
【0039】
また、図3Cに示すように、「臥位(うつ伏せ)」のメンバシップ関数f7の一例として、az≦0.6の場合にLIE_FRONT=0となり、0.6<az<0.8の場合にLIE_FRONT=5(az)−3となり、0.8≦azの場合にLIE_FRONT=1となる関数が設定できる。また、「臥位(仰向け)」のメンバシップ関数f8の一例として、az≦−0.8の場合にLIE_BACK=1となり、−0.8<az<−0.6の場合にLIE_BACK=−5(az)−3となり、−0.6≦azの場合にLIE_BACK=0となる関数が設定できる。また、「臥位(前後の向きなし)」のメンバシップ関数f9の一例として、az≦−0.8の場合にNOT_LIE_FB=0となり、−0.8<az<−0.6の場合にNOT_LIE_FB=5(az)+4となり、−0.6≦az≦0.6の場合にNOT_LIE_FB=1となり、0.6<az<0.8の場合にNOT_LIE_FB=−5(az)+4となり、0.8≦azの場合にNOT_LIE_FB=0となる関数が設定できる。
【0040】
よって、Z軸加速度azに応じた各メンバシップ値LIE_FRONT〜NOT_LIE_LRの和(LIE_FRONT+LIE_BACK+NOT_LIE_FB)が1となるように設定されている(f7(az)+f8(az)+f9(az)=1)。また、az≦−0.8,−0.6≦az≦0.6,0.8≦azで各メンバシップ値LIE_BACK,NOT_LIE_FB,LIE_FRONTがそれぞれ1に設定され、−0.8<az<−0.6が各メンバシップ値LIE_BACK,NOT_LIE_FBの0から1への境界部に設定され、0.6<az<0.8が各メンバシップ値NOT_LIE_FB,LIE_FRONTの0から1への境界部に設定されている。
なお、実施例1では、各加速度ax〜azに応じて出力される各メンバシップ値STAND〜NOT_LIE_FBの和(STAND+SIT+LIE),(LIE_LEFT+LIE_RIGHT+NOT_LIE_LR),(LIE_FRONT+LIE_BACK+NOT_LIE_FB)が1となる各メンバシップ関数f1〜f9を設定したが、これに限定されず、例えば、和(STAND+SIT+LIE),(LIE_LEFT+LIE_RIGHT+NOT_LIE_LR),(LIE_FRONT+LIE_BACK+NOT_LIE_FB)が1より小さい値となるメンバシップ関数を設定することも可能である。
【0041】
よって、実施例1の前記姿勢情報記憶手段C4Aは、「立位」のメンバシップ関数f1(図3Aの実線参照)と、「座位」のメンバシップ関数f2(図3Aの1点鎖線参照)と、「臥位」のメンバシップ関数f3(図3Aの2点鎖線参照)とをセンサタグIDと対応付けて記憶する。また、前記姿勢情報記憶手段C4Aは、「臥位(左向き)」のメンバシップ関数f4(図3Bの実線参照)と、「臥位(右向き)」のメンバシップ関数f5(図3Bの1点鎖線参照)と、「臥位(左右の向きなし)」のメンバシップ関数f6(図3Bの2点鎖線参照)とをセンサタグIDと対応付けて記憶する。さらに、前記姿勢情報記憶手段C4Aは、「臥位(うつ伏せ)」のメンバシップ関数f7(図3Cの実線参照)と、「臥位(仰向け)」のメンバシップ関数f8(図3Cの1点鎖線参照)と、「臥位(前後の向きなし)」のメンバシップ関数f9(図3Cの2点鎖線参照)とをセンサタグIDと対応付けて記憶する。
【0042】
C4B:静動情報記憶手段
静動情報記憶手段C4Bは、前記受信情報記憶手段C3に記憶された複数の加速度データに基づく複数の加速度ベクトル(各加速度ax〜azの合成ベクトル)の分散σ2と、対象者の動作の有無、すなわち、「静止」および「移動」とを対応づける情報としての静動情報をセンサタグIDと対応付けて記憶する。ここで、「静止」、「移動」については、複数の加速度ベクトルの分散σ2に基づいて判別可能である。例えば、「静止」ならばσ2≒0となり、「移動」ならばσ2>0で変化すると考えられる。よって、図3Dに示すように、分散σ2に基づいて、分散σ2と「静止」、「移動」の各メンバシップ値STOP,MOVE(0≦STOP≦1,0≦MOVE≦1)とを対応づける「静止」、「移動」の各メンバシップ関数f10,f11を設定できる。
【0043】
具体的には、図3Dに示すように、「静止」のメンバシップ関数f10の一例として、0≦σ2≦0.004の場合にSTOP=1となり、0.004<σ2<0.006の場合にSTOP=−500(σ2)+3となり、0.006≦σ2の場合にSTOP=0となる関数が設定できる。また、「移動」のメンバシップ関数f11の一例として、0≦σ2≦0.004の場合にMOVE=0となり、0.004<ay<0.006の場合にMOVE=500(σ2)−2となり、0.006≦σ2の場合にMOVE=1となる関数が設定できる。
よって、分散σ2に応じた各メンバシップ値STOP,MOVEの和(STOP+MOVE)が1に設定されている(f10(σ2)+f11(σ2)=1)。また、0≦σ2≦0.004,0.006≦σ2で各メンバシップ値STOP,MOVEがそれぞれ1に設定され、0.004<σ2<0.006が各メンバシップ値STOP,MOVEの0から1への境界部に設定されている。
なお、実施例1では、分散σ2に応じて出力される各メンバシップ値STAND,MOVEの和(STOP+MOVE)が1となる各メンバシップ関数f10,f11を設定したが、これに限定されず、例えば、和(STOP+MOVE)が1より小さい値となるメンバシップ関数を設定することも可能である。
【0044】
よって、実施例1の前記静動情報記憶手段C4Bは、「静止」のメンバシップ関数f10(図3Dの実線参照)と、「移動」のメンバシップ関数f11(図3Dの1点鎖線参照)とをセンサタグIDと対応付けて記憶する。
なお、実施例1の前記分散σ2は、直近50個の各加速度ax〜azから得られる加速度ベクトルa1,a2,…,a50(a1=(ax1,ay1,az1),a2=(ax2,ay2,az2),…,a50=(ax50,ay50,az50))の標本分散となるように予め設定されている。すなわち、分散σ2は、50個の加速度ベクトルa1〜a50の平均ベクトルをμとし各ベクトルa1〜a50,μの転置ベクトルをa1T〜a50T,μTとした場合に、以下の式(1−1)によって演算される。
σ2=(1/50)×Σi=150(aiaiT)−μμT …式(1−1)
【0045】
具体的には、前記式(1−1)を展開した以下の式(1−2)によって、分散σ2を演算する。
σ2=+{(ax12+ay12+az12)
+…+(ax502+ay502+az502)}/50
−{(ax1+…+ax50)2
+(ay1+…+ay50)2
+(az1+…+az50)2}/502 …式(1−2)
よって、例えば、対象者が2.5秒以上仰向けで静止し(50×50=2500[ms])、az1=…=az50=−1[G],ax1=…=ax50=ay1=…=ay50=0[G]が成立する場合、σ2=50/50−502/502=0が成立する。
【0046】
C4C:強弱情報記憶手段
強弱情報記憶手段C4Cは、前記受信情報記憶手段C3に記憶された複数の加速度データに基づく複数の加速度ベクトルの長さ(大きさ)の最大値と最小値との差分Δaと、対象者の動作の激しさ(強弱)とを対応づける情報としての強弱情報を記憶する。実施例1では、対象者の動作の激しさの一例として、激しさが小さい(弱い)「弱」、激しさが大きい(強い)「強」が予め設定されている。ここで、「弱」、「強」については、複数の加速度ベクトルの最大値と最小値との差分Δaに基づいて判別可能である。例えば、「弱」の代表例として対象者が歩行している場合にはΔa≒1となり、「強」の代表例として対象者が走行している場合ならばΔa>1で変化すると考えられる。
【0047】
よって、図3Eに示すように、差分Δaに基づいて、差分Δaと「弱」、「強」の各メンバシップ値WALK,RUN(0≦WALK≦1,0≦RUN≦1)とを対応づける「弱」、「強」の各メンバシップ関数f12,f13を設定できる。
具体的には、図3Eに示すように、「弱」のメンバシップ関数f12の一例として、0≦Δa≦1.25の場合にWALK=1となり、1.25<Δa<1.75の場合にWALK=−2(Δa)+2.5となり、1.25≦Δaの場合にWALK=0となる関数が設定できる。また、「強」のメンバシップ関数f13の一例として、0≦Δa≦1.25の場合にRUN=0となり、1.25<Δa<1.75の場合にRUN=2(Δa)−2.5となり、1.75≦Δaの場合にRUN=1となる関数が設定できる。
【0048】
よって、差分Δaに応じた各メンバシップ値WALK,RUNの和(WALK+RUN)が1に設定されている(f12(Δa)+f13(Δa)=1)。また、0≦Δa≦1.25,1.75≦Δaで各メンバシップ値WALK,RUNがそれぞれ1に設定され、1.25<Δa<1.75が各メンバシップ値WALK,RUNの0から1への境界部に設定されている。
なお、実施例1では、差分Δaに応じて出力される各メンバシップ値WALK,RUNの和(WALK+RUN)が1となる各メンバシップ関数f12,f13を設定したが、これに限定されず、例えば、和(WALK+RUN)が1より小さい値となるメンバシップ関数を設定することも可能である。
【0049】
よって、実施例1の前記強弱情報記憶手段C4Cは、「弱」のメンバシップ関数f12(図3Eの実線参照)と、「強」のメンバシップ関数f13(図3Eの1点鎖線参照)とをセンサタグIDと対応付けて記憶する。
なお、実施例1の前記差分Δaは、直近17個の各加速度ax〜azから得られる加速度ベクトルa1,a2,…,a17の最大値と最小値との差分となるように予め設定されている。すなわち、差分Δaは、17個の加速度ベクトルa1〜a17の大きさ、すなわち、ユークリッド距離を|a1|〜|a17|とし(|ai|=(axi2+ayi2+azi2)1/2,i=1,2,…,17)、最大値をmax(|a1|,|a2|,…,|a17|)とし、最小値をmin(|a1|,|a2|,…,|a17|)とした場合に、以下の式(1−3)によって演算される。
Δa=+max(|a1|,…,|a17|)
−min(|a1|,…,|a17|) …式(1−3)
よって、例えば、対象者が2.5秒以上仰向けで静止し、az1=…=az17=−1,ax1=…=ax17=ay1=…=ay17=0が成立する場合、Δa=1−1=0が成立する。
【0050】
C5:割合演算手段(メンバシップ値演算手段、グレード値演算手段、確率演算手段)
割合演算手段C5は、前記受信情報記憶手段C3に記憶された加速度データと、前記動作情報記憶手段C4に記憶された動作情報とに基づいて、対象者の姿勢、動作の有無、動作の激しさの各割合(グレード値、確率)を演算する。実施例1の前記割合演算手段C5は、以下の式(2−1)〜式(2−13)から、直近50個の加速度ベクトルa1〜a50とメンバシップ関数f1〜f13とに応じたメンバシップ値STAND〜RUNを演算する(図3参照)。
【0051】
f1(ax1)=STAND …式(2−1)
f2(ax1)=SIT …式(2−2)
f3(ax1)=LIE …式(2−3)
f4(ay1)=LIE_LEFT …式(2−4)
f5(ay1)=LIE_RIGHT …式(2−5)
f6(ay1)=NOT_LIE_LR …式(2−6)
f7(az1)=LIE_FRONT …式(2−7)
f8(az1)=LIE_BACK …式(2−8)
f9(az1)=NOT_LIE_FB …式(2−9)
f10(σ2)=STOP …式(2−10)
f11(σ2)=MOVE …式(2−11)
f12(Δa)=WALK …式(2−12)
f13(Δa)=RUN …式(2−13)
よって、例えば、対象者が2.5秒以上仰向けで静止し、az1=…=az50=−1,ax1=…=ax50=ay1=…=ay50=0,σ2=Δa=0が成立する場合、LIE=NOT_LIE_LR=LIE_FRONT=STOP=WALK=1,STAND=SIT=LIE_LEFT=LIE_RIGHT=LIE_BACK=NOT_LIE_FB=MOVE=RUN=0が成立する。
【0052】
C6:判別値演算手段(ファジィルール適用値演算手段)
判別値演算手段C6は、前記割合演算手段C5によって演算された対象者の姿勢、動作の有無、動作の激しさの各割合から、動作を判別するために用いる判別値を演算する。実施例1の前記判別値演算手段C6は、前記割合演算手段C5によって演算された各メンバシップ値STAND〜RUNに予め設定された各ファジィルールを適用して、「立位」、「座位」、「臥位(前後左右の向きは不明)」、「臥位(左向き)」、「臥位(右向き)」、「臥位(左右の向きなし)」、「臥位(うつ伏せ)」、「臥位(仰向け)」、「臥位(前後の向きなし)」、「静止」、「弱」、「強」の判別値STAND,SIT,LIE,LIE_LEFT,LIE_RIGHT,NOT_LIE_LR,LIE_FRONT,LIE_BACK,NOT_LIE_FB,STOP,WALK,RUNを演算する。すなわち、「移動」のメンバシップ値MOVE以外を更新する。
なお、ファジィルールに関する詳細な説明については、例えば、特許文献3等に記載されており、公知であるため、詳細な説明については省略する。
【0053】
具体的には、以下の式(3−1)〜(3−12)から、演算されたメンバシップ値STAND〜RUNを演算する。
ここで、式(3−1)〜(3−12)に示す、NOT(A)とは、「Aの否定(余事象)」の演算子である。例えば、NOT(0.7) = 1 - 0.7 = 0.3が成立する。また、OR(A, B)とは、「AとBとの論理和」の演算子であり、AとBとのうちの最大値が演算される。例えば、OR(0.7, 0.3) = max(0.7, 0.3) = 0.7が成立する。さらに、AND(A, B)とは、「AとBとの論理積」の演算子であり、AとBとのうちの最小値が演算される。例えば、AND(0.7, 0.3) = min(0.7, 0.3) = 0.3が成立する。
なお、式(3−1)〜(3−12)に示す実施例1の各ファジィルールは、各メンバシップ関数gf1〜f13と同様に、予め取得した各動作の21個のサンプルに基づいて予め設定されている(図4参照)。
【0054】
NOT_LIE_LR = NOT(OR(LIE_LEFT, LIE_RIGHT)) …式(3−1)
NOT_LIE_FB = NOT(OR(LIE_FRONT, LIE_BACK)) …式(3−2)
LIE = OR(NOT(OR(STAND, SIT)),
OR(OR(LIE_LEFT, LIE_RIGHT), OR(LIE_FRONT, LIE_BACK))) …式(3−3)
STAND = AND(STAND, AND(NOT_LIE_LR, NOT_LIE_FB)) …式(3−4)
SIT = AND(SIT, AND(NOT_LIE_LR, NOT_LIE_FB)) …式(3−5)
LIE_LEFT = AND(LIE_LEFT, LIE) …式(3−6)
LIE_RIGHT = AND(LIE_RIGHT, LIE) …式(3−7)
LIE_FRONT = AND(LIE_ FRONT, LIE) …式(3−8)
LIE_BACK = AND(LIE_BACK, LIE) …式(3−9)
STOP = OR(STOP, OR(LIE, SIT) …式(3−10)
WALK = OR(WALK, MOVE) …式(3−11)
RUN = OR(RUN, MOVE) …式(3−12)
よって、例えば、対象者が2.5秒以上仰向けで静止し、LIE=NOT_LIE_LR=LIE_FRONT=STOP=WALK=1,STAND=SIT=LIE_LEFT=LIE_RIGHT=LIE_BACK=NOT_LIE_FB=MOVE=RUN=0が成立する場合、NOT_LIE_LR=LIE=LIE_FRONT=STOP=WALK=1,NOT_LIE_FB=STAND=SIT=LIE_LEFT=LIE_RIGHT=LIE_BACK=RUN=0に更新される。なお、「移動」のメンバシップ値MOVEは更新されず、MOVE=0が成立する。
【0055】
C7:動作判別手段
動作判別手段C7は、姿勢判別手段C7Aと、静動判別手段C7Bと、強弱判別手段C7Cとを有し、前記受信情報記憶手段C3に記憶された加速度データと、前記動作情報記憶手段C4に記憶された動作情報とに基づいて、対象者の動作を判別する。
C7A:姿勢判別手段
姿勢判別手段C7Aは、前記加速度データに基づいて、対象者の姿勢を判別する。実施例1の前記姿勢判別手段C7Aは、「立位」、「座位」、「臥位(前後左右の向きは不明)」、「臥位(左向き)」、「臥位(右向き)」、「臥位(左右の向きなし)」、「臥位(うつ伏せ)」、「臥位(仰向け)」、「臥位(前後の向きなし)」の各判別値STAND,SIT,LIE,LIE_LEFT,LIE_RIGHT,NOT_LIE_LR,LIE_FRONT,LIE_BACK,NOT_LIE_FBのうちの最大値に対応する姿勢(「立位」、「座位」、「臥位(前後左右の向きは不明)」、「臥位(左向き)」、「臥位(右向き)」、「臥位(左右の向きなし)」、「臥位(うつ伏せ)」、「臥位(仰向け)」、「臥位(前後の向きなし)」)を判別する。
【0056】
また、実施例1の前記姿勢判別手段C7Aは、最大値が複数存在する場合、STAND→SIT→LIE_LEFT,LIE_RIGHT,LIE_FRONT,LIE_BACK→NOT_LIE_LR,NOT_LIE_FB→LIEの優先順位で選択されるように予め設定されている。よって、例えば、最大値がSTAND,SITの場合、「立位」と判別される。また、例えば、対象者が2.5秒以上仰向けで静止し、NOT_LIE_LR=LIE=LIE_FRONT=1,NOT_LIE_FB=STAND=SIT=LIE_LEFT=LIE_RIGHT=LIE_BACK=0が成立する場合、「臥位(仰向け)」と判別される。
【0057】
C7B:静動判別手段
静動判別手段C7Bは、加速度ベクトルa1〜a50の分散σ2に基づいて、対象者の動作の有無、すなわち、「静止」および「移動」のいずれかを判別する。実施例1の前記静動判別手段C7Bは、「静止」、「移動」の各判別値STOP,MOVEのうちの大きな値に対応する「静止」および「移動」のいずれかを判別する。また、実施例1の前記静動判別手段C7Bは、STOP=MOVEが成立する場合、STOP→MOVEの優先順位で選択されるように予め設定されており、「静止」と判別される。よって、例えば、対象者が2.5秒以上仰向けで静止し、STOP=1,MOVE=0が成立する場合、「静止」と判別される。
【0058】
C7C:強弱判別手段
強弱判別手段C7Cは、加速度ベクトルa1〜a17の最大値と最小値との差分Δaに基づいて、対象者の動作の激しさを判別する。実施例1の前記強弱判別手段C7Cは、「弱」、「強」の各判別値WALK,RUNのうちの大きな値に対応する「弱」および「強」のいずれかを判別する。また、実施例1の前記強弱判別手段C7Cは、WALK=RUNが成立する場合、WALK→RUNの優先順位で選択されるように予め設定されており、「弱」と判別される。よって、例えば、対象者が2.5秒以上仰向けで静止しWALK=1,RUN=0が成立する場合、「弱」と判別される。
【0059】
よって、実施例1の前記動作判別手段C7は、前記姿勢判別手段C7Aによって判別された対象者の姿勢と、前記静動判別手段C7Bによって判別された対象者の動作の有無と、前記強弱判別手段C7Cによって判別された対象者の動作の激しさとに基づいて、対象者の動作を判別する。実施例1の前記動作判別手段C7は、姿勢が「立位」と判別された場合、「静止」ならば対象者の動作が「立位」であると判別し、「移動」且つ「弱」ならば対象者の動作が「歩行」であると判別し、「移動」且つ「強」ならば対象者の動作が「走行」であると判別する。また、姿勢が「座位」、「臥位(前後左右の向きは不明)」、「臥位(左向き)」、「臥位(右向き)」、「臥位(左右の向きなし)」、「臥位(うつ伏せ)」、「臥位(仰向け)」、「臥位(前後の向きなし)」と判別された場合、判別された姿勢が対象者の動作であると判別する。
【0060】
C8:動作推移記憶手段(動作ログ記憶手段)
動作推移記憶手段C8は、前記動作判別手段C7によって判別された対象者の動作の推移(動作ログ)を記憶する。実施例1の前記動作推移記憶手段C8は、前記動作判別手段C7によって判別された対象者の動作と前記受信情報記憶手段C3に記憶された情報とを対応付けて記憶することにより、対象者の動作の推移を記憶する。すなわち、前記動作推移記憶手段C8には、前記受信情報記憶手段C3に記憶された時期ごとに、対象者の動作(「立位」、「歩行」、「走行」、「座位」、「臥位(前後左右の向きは不明)」、「臥位(左向き)」、「臥位(右向き)」、「臥位(左右の向きなし)」、「臥位(うつ伏せ)」、「臥位(仰向け)」、「臥位(前後の向きなし)」)が記憶される。また、実施例1の前記動作推移記憶手段C8には、判別された前記動作だけでなく前記動作の有無(「静止」、「移動」)と前記動作の激しさ(「弱」、「強」)が併せて記憶される。
この結果、実施例1の前記動作推移記憶手段C8は、センサタグIDに応じて、対象者ごとに動作の推移(姿勢を含む動作、動作の有無、動作の激しさ)を記憶する。
【0061】
C9:行動情報記憶手段(動作コンテキスト記憶手段)
行動情報記憶手段C9は、前記動作推移記憶手段C8に記憶された対象者の動作の推移と、対象者の行動とを対応づける情報としての行動情報を記憶する。実施例1の前記行動情報記憶手段C9は、前記行動情報として、対象者の動作の前後関係(文脈、脈絡)の情報(対象者の行動の判別条件の情報)である動作コンテキスト(Context、コンテクスト)(c1〜c3)をセンサタグIDと対応付けて記憶する。
すなわち、実施例1の前記行動情報記憶手段C9は、センサタグIDに応じて、対象者ごとに各動作コンテキスト(c1〜c3)を記憶する。
【0062】
具体的には、実施例1では、対象者の行動の一例として、立っている状態で倒れる「転倒」、寝ている状態で向きを変更する「寝返り」、寝ている状態から起き上がる「離床(起床)」が予め設定されている。ここで、「転倒」については、図4に示すように、「立位」、「歩行」、「走行」が一定期間継続された後に数秒間で姿勢が大きく崩れて急激な加速度の変化が発生して「座位」、「臥位」に変化すると考えられる。よって、実施例1では、「転倒」の動作コンテキストc1として、『「立位」、「歩行」、「走行」のいずれかが20秒以上連続した後、「座位」、「臥位(前後左右の向きは不明)」、「臥位(左向き)」、「臥位(右向き)」、「臥位(左右の向きなし)」、「臥位(うつ伏せ)」、「臥位(仰向け)」、「臥位(前後の向きなし)」に変化した際の直前の2.5秒間に「移動」且つ「強」の判別回数が予め設定された閾値を超えること』に関する情報が予め設定されている。
【0063】
図5は縦軸を加速度とし横軸を時間とした場合の3軸の加速度データの説明図であり、図5Aは対象者が左向き・うつ伏せ・左向き・仰向けの順に寝返りした際の加速度データの一例の説明図、図5Bは対象者が仰向けの状態から膝を立てて床を肘や手で支えながら上体を起こして離床した際の加速度データの一例の説明図である。
また、「寝返り」についても「転倒」と同様に、図5Aに示すように、「臥位(左向き)」、「臥位(右向き)」、「臥位(うつ伏せ)」、「臥位(仰向け)」のいずれかが同じ動作で変化せずに一定期間継続された後に数秒間で姿勢が大きく変化し、別の「臥位(左向き)」、「臥位(右向き)」、「臥位(うつ伏せ)」、「臥位(仰向け)」に変化すると考えられる。よって、実施例1では、「寝返り」の動作コンテキストc2として、『「臥位(左向き)」、「臥位(右向き)」、「臥位(うつ伏せ)」、「臥位(仰向け)」のいずれかが同じ動作で変化せずに20秒以上連続した後、別の「臥位(左向き)」、「臥位(右向き)」、「臥位(うつ伏せ)」、「臥位(仰向け)」に変化すること』に関する情報が予め設定されている。
【0064】
さらに、「離床(起床)」についても「寝返り」と同様に、図5Bに示すように、任意の方向への「臥位」が一定期間継続された後に姿勢が大きく変化し、「立位」、「座位」に変化すると考えられる。よって、実施例1では、「離床(起床)」の動作コンテキストc3として、『「臥位(前後左右の向きは不明)」、「臥位(左向き)」、「臥位(右向き)」、「臥位(左右の向きなし)」、「臥位(うつ伏せ)」、「臥位(仰向け)」、「臥位(前後の向きなし)」のいずれかが20秒以上連続した後、「立位」、「座位」に変化すること』に関する情報が予め設定されている。
よって、前記行動情報記憶手段C9には、予め設定された「転倒」、「寝返り」、「離床(起床)」の動作コンテキストc1〜c3をセンサタグIDと対応付けて記憶する。
【0065】
C10:行動判別手段
行動判別手段C10は、「転倒」の動作コンテキストc1に基づいて対象者の「転倒」を判別する転倒判別手段C10Aと、「寝返り」の動作コンテキストc2に基づいて対象者の「寝返り」を判別する寝返り判別手段C10Bと、「離床(起床)」の動作コンテキストc3に基づいて、対象者の「離床(起床)」を判別する離床判別手段C10Cとを有し、前記動作推移記憶手段C8に記憶された対象者の動作の推移と前記行動情報記憶手段C9に記憶された行動情報とに基づいて、対象者の行動を判別する。実施例1の前記行動判別手段C10は、前記動作推移記憶手段C8に記憶内容、すなわち、対象者の動作の推移が更新された場合に、前記行動情報記憶手段C9に記憶された「転倒」、「寝返り」、「離床(起床)」の各動作コンテキストc1〜c3に基づいて、対象者の「転倒」、「寝返り」、「離床(起床)」を判別する。
【0066】
C11:行動認識情報記憶手段(行動記憶手段)
行動認識情報記憶手段C11は、前記行動判別手段C10によって判別された対象者の行動に基づく行動認識情報を記憶する。実施例1の前記行動認識情報記憶手段C11は、前記行動判別手段C10によって判別された対象者の行動と、前記受信情報記憶手段C3に記憶された情報とを対応付けて記憶する。すなわち、実施例1の前記行動認識情報記憶手段C11には、前記受信情報記憶手段C3に記憶された時期ごとに、対象者の動作の推移に基づく行動が記憶される。
この結果、実施例1の前記行動認識情報記憶手段C11は、センサタグIDに応じて、対象者ごとに行動認識情報を記憶する。
【0067】
図6は実施例1の行動表示画像の説明図である。
C12:行動表示手段
行動表示手段C12は、行動表示画像表示手段C12Aと、動作推移表示手段C12Bと、行動認識情報表示手段C12Cと、行動認識情報通報手段C12Dとを有し、前記行動判別手段C10によって判別された対象者の行動を表示する。実施例1の前記行動表示手段C12は、センサタグIDに応じて、対象者ごとに判別された行動を表示する。
C12A:行動表示画像表示手段
行動表示画像表示手段C12Aは、図6に示す行動表示画像101をディスプレイ2bに表示する。実施例1の前記行動表示画像101は、対象者の動作の推移を表示する動作推移表示部101aと、対象者の行動を表示する行動表示部102aとを有する。実施例1の前記行動表示画像表示手段C12Aは、センサタグIDに応じて、対象者ごとに行動表示画像101を表示する。
【0068】
C12B:動作推移表示手段
動作推移表示手段C12Bは、前記受信情報記憶手段C3に記憶された時期に応じた時刻と、前記動作推移記憶手段C8に記憶された前記時刻に応じた動作と、前記受信情報記憶手段C3に記憶されたアクセスポイントIDおよびRSSI値に基づくセンサタグ4,4のアクセスポイント3,3までの距離とを動作推移表示部101aに表示する。実施例1の前記動作推移表示手段C12Bは、センサタグIDに応じて、対象者ごとに1分ごとの対象者の動作の推移と前記距離とを動作推移表示部101aに表示する。なお、RSSI値に基づく前記距離は、実験等により予め設定された関数に基づいて演算され、例えば、−128[dBm]の場合に30[m]、+128[dBm]の場合に0[m]が演算される。
【0069】
C12C:行動認識情報表示手段
行動認識情報表示手段C12Cは、前記受信情報記憶手段C3に記憶された時期に応じた時刻と、前記行動認識情報記憶手段C11に記憶された前記時刻に応じた行動とを行動表示部102aに表示する。実施例1の前記行動認識情報表示手段C12Cは、センサタグIDに応じて、対象者ごとに認識した時刻と行動とを行動表示部102aに表示する。
C12D:行動認識情報通報手段
行動認識情報通報手段C12Dは、行動表示部102aに表示される時刻と行動とを外部の通報先(例えば、老人ホームの介護士ステーションや、離れて暮らす家族、ホームセキュリティ会社、病院のナースステーション(管理室)等)に通報する(図1参照)。
【0070】
(実施例1のフローチャートの説明)
次に、実施例1の前記各制御部の各プログラムの処理の流れをフローチャートを使用して説明する。なお、センサタグ4,4がアクセスポイント3,3に情報を送信する処理については、加速度センサ4a,4aによって検出された加速度データと端末情報記憶手段CS1に記憶されたセンサタグIDと含む情報を50[ms]ごとに送信するだけである。また、アクセスポイント3,3がサーバ2に情報を転送する処理については、センサタグ4,4から受信した情報にアクセスポイントIDとRSSI値とを付加した情報をサーバ2に送信するだけである。また、サーバ2で行動表示画像101を表示する処理については、センサタグIDに応じた対象者ごとの行動表示画像101をディスプレイ2aに表示し、1分ごとに各対象者の動作の推移とアクセスポイント3,3からの距離とを動作推移表示部101aに表示すると共に、各対象者の行動が判別された場合に行動認識情報を行動表示部102aに表示するだけである。よって、説明の簡単のため、図示および詳細な説明を省略する。
【0071】
(実施例1の動作推移記憶処理の説明)
図7は実施例1の動作推移記憶処理のフローチャートである。
図7のフローチャートの各ST(ステップ)の処理は、サーバ2のコンピュータ本体2aの制御部のROM等に記憶されたプログラムに従って行われる。また、この処理は前記制御部の他の各種処理と並行してマルチタスクで実行される。
図7に示すフローチャートは、前記制御部の行動認識プログラムAP1が起動した場合に開始される。
【0072】
図7のST101において、アクセスポイント3,3から転送された情報、すなわち、加速度データ、センサタグID、アクセスポイントID、RSSI値を含む情報を受信したか否かを判別する。イエス(Y)の場合はST102に移り、ノー(N)の場合はST101を繰り返す。
ST102において、受信した時期と受信した情報とを対応付けて記憶する。そして、ST103に移る。
ST103において、直近50個の加速度ベクトルa1〜a50とメンバシップ関数f1〜f13とに応じたメンバシップ値STAND〜RUNを演算する(図3、式(2−1)〜式(2−13)参照)。そして、ST104に移る。
ST104において、演算されたメンバシップ値STAND〜RUNにファジィルールを適用して判別値STAND〜RUNを演算する。すなわち、メンバシップ値STAND〜RUNを更新する。そして、ST105に移る。
ST105において、対象者の姿勢と動作の有無と動作の激しさとに基づく対象者の動作を判別する動作判別処理を実行する。そして、ST106に移る。
ST106において、判別された動作を受信した時期と対応付けて記憶することにより、対象者の動作の推移を記憶する。そして、ST101に戻る。
【0073】
(実施例1の動作判別処理の説明)
図8は実施例1の動作判別処理のフローチャートであり、図7のST105のサブルーチンの説明図である。
図8のST151において、判別値STAND〜NOT_LIE_FBの最大値に対応する姿勢(「立位」、「座位」、「臥位(前後左右の向きは不明)」、「臥位(左向き)」、「臥位(右向き)」、「臥位(左右の向きなし)」、「臥位(うつ伏せ)」、「臥位(仰向け)」、「臥位(前後の向きなし)」)を判別する。そして、ST152に移る。
ST152において、判別値STOP,MOVEの大きな値に対応する対象者の動作の有無(「静止」または「移動」)を判別する。そして、ST153に移る。
ST153において、判別値WALK,RUNの大きな値に対応する対象者の動作の激しさ(「弱」または「強」)を判別する。そして、ST154に移る。
ST154において、対象者の姿勢が「立位」であるか否かを判別する。イエス(Y)の場合はST155に移り、ノー(N)の場合はST160に移る。
ST155において、動作の有無が「移動」であるか否かを判別する。ノー(N)の場合はST156に移り、イエス(Y)の場合はST157に移る。
【0074】
ST156において、対象者の動作を「立位」と判別する。そして、前記動作判別処理を終了して図7のST105に戻る。
ST157において、対象者の動作の激しさが「弱」であるか否かを判別する。イエス(Y)の場合はST158に移り、ノー(N)の場合はST159に移る。
ST158において、対象者の動作を「歩行」と判別する。そして、前記動作判別処理を終了して図7のST105に戻る。
ST159において、対象者の動作を「走行」と判別する。そして、前記動作判別処理を終了して図7のST105に戻る。
ST160において、対象者の動作を判別された姿勢(「座位」、「臥位(左向き)」、「臥位(右向き)」、「臥位(うつ伏せ)」、「臥位(仰向け)」、「臥位(左右の向きなし)」、「臥位(前後の向きなし)」、「臥位(前後左右の向きは不明)」と判別する。そして、前記動作判別処理を終了して図7のST105に戻る。
【0075】
(実施例1の行動認識処理の説明)
図9は実施例1の行動認識処理のフローチャートである。
図9のフローチャートの各ST(ステップ)の処理は、前記サーバ2の制御部のROM等に記憶されたプログラムに従って行われる。また、この処理は前記制御部の他の各種処理と並行してマルチタスクで実行される。
図9に示すフローチャートは、前記制御部の前記行動認識プログラムAP1が起動した場合に開始される。
【0076】
図9のST201において、動作推移記憶手段C8に記憶された動作の推移が更新されたか否かを判別する。イエス(Y)の場合はST202に移り、ノー(N)の場合はST201を繰り返す。
ST202において、各動作コンテキストc1〜c3に基づいて、対象者の行動(「転倒」、「寝返り」、「離床(起床)」)を判別する行動判別処理を実行する。そして、ST203に移る。
ST203において、前記行動判別処理によって行動が判別されたか否かを判別する。イエス(Y)の場合はST204に移り、ノー(N)の場合はST201に戻る。
ST204において、判別された行動を受信した時期と対応付けて記憶することにより、行動認識情報を記憶する。そして、ST205に移る。
ST205において、前記時期に応じた時刻と行動認識情報とを通報先に通報する。そして、ST201に戻る。
【0077】
(実施例1の行動判別処理の説明)
図10は実施例1の行動判別処理のフローチャートであり、図9のST202のサブルーチンの説明図である。
図10のST251において、動作推移記憶手段C8に記憶された動作の推移に基づいて、20秒以上「立位」、「歩行」、「走行」のいずれかが連続後に、最新の動作が「座位」、「臥位(前後左右の向きは不明)」、「臥位(左向き)」、「臥位(右向き)」、「臥位(左右の向きなし)」、「臥位(うつ伏せ)」、「臥位(仰向け)」、「臥位(前後の向きなし)」のいずれかに変化したか否かを判別する。イエス(Y)の場合はST252に移り、ノー(N)の場合はST254に移る。
ST252において、直前の2.5秒間に、「移動」且つ「強」の判別回数が閾値を超えたか否かを判別する。イエス(Y)の場合はST253に移り、ノー(N)の場合は前記行動判別処理を終了して図9のST202に戻る。
ST253において、対象者の行動を「転倒」と判別する。そして、前記行動判別処理を終了して図9のST202に戻る。
【0078】
ST254において、動作推移記憶手段C8に記憶された動作の推移に基づいて、20秒以上同じ「臥位(左向き)」、「臥位(右向き)」、「臥位(うつ伏せ)」、「臥位(仰向け)」のいずれかが連続後に、別の「臥位(左向き)」、「臥位(右向き)」、「臥位(左右の向きなし)」、「臥位(うつ伏せ)」、「臥位(仰向け)」、「臥位(前後の向きなし)」のいずれかに変化したか否かを判別する。イエス(Y)の場合はST255に移り、ノー(N)の場合はST256に移る。
ST255において、対象者の行動を「寝返り」と判別する。そして、前記行動判別処理を終了して図9のST202に戻る。
【0079】
ST256において、動作推移記憶手段C8に記憶された動作の推移に基づいて、20秒以上「臥位(前後左右の向きは不明)」、「臥位(左向き)」、「臥位(右向き)」、「臥位(左右の向きなし)」、「臥位(うつ伏せ)」、「臥位(仰向け)」、「臥位(前後の向きなし)」のいずれかが20秒以上連続後に、「立位」または「座位」に変化したか否かを判別する。イエス(Y)の場合はST257に移り、ノー(N)の場合は前記行動判別処理を終了して図9のST202に戻る。
ST257において、対象者の行動を「離床(起床)」と判別する。そして、前記行動判別処理を終了して図9のST202に戻る。
【0080】
(実施例1の作用)
前記構成を備えた実施例1の前記行動認識システム1では、サーバ2において、図7、図8に示す動作推移記憶処理および動作判別処理が実行され、各対象者の腰に装着されたセンサタグ4,4から送信された加速度データ等を含む情報の受信信号に基づいて、対象者の動作の推移が記憶される。実施例1の動作推移記憶処理では、ファジィ推論を適用して、検出された加速度データに応じた各動作が検出時期ごとに判別されて記憶される。具体的には、直近50個の加速度データに応じたメンバシップ値STAND〜RUNが予め設定された各メンバシップ関数f1〜f13によって演算され、演算されたメンバシップ値STAND〜RUNにファジィルールが適用されて更新された判別値STAND〜RUNの最大値に基づいて各動作が判別され記憶される。
また、実施例1の前記行動認識システム1では、サーバ2において、図9、図10に示す行動認識処理および行動判別処理が実行され、記憶された動作の推移と、各行動に応じた各動作コンテキストc1〜c3とに基づいて、動作の前後関係から判別された行動が記憶されて通報先に通報される。
【0081】
ここで、発明者は、前記各判別処理(図8、図10参照)を実行することにより、各動作、各行動を判別できるか否かを調べるために、実験を行った。
前記実験では、サーバ2や、アクセスポイント3、センサタグ4を実施例1と同様に配置し、年齢が20代の健康な被験者(健常者)7人に対して、センサタグ4を腰に取り付けて、被験者全員に共通した各メンバシップ関数f1〜f13や各動作コンテキストc1〜c3を設定、記憶した上で、1人ずつ各動作、各行動をそれぞれ3回(3セット)試行させて、各判別処理を実行した判別結果と前記試行とを照合した認識率を算出した。
【0082】
まず、姿勢については、「立位」、「座位」、「臥位(左向き)」、「臥位(右向き)」、「臥位(うつ伏せ)」、「臥位(仰向け)」について試行して認識率を算出した。
この結果、「立位」については認識率100[%]であり、「臥位」についても前傾等して静止できていない場合に「座位」と誤認識することがあったが、静止できている場合には4方向全て認識率は100[%]であった。なお、「座位」については腰の角度に応じて識別できない場合があったが、腰の角度が軽く椅子の背もたれを使う程度で静止できている場合には認識率100[%]が得られた。なお、「立位」と「座位」とを交互に繰り返す行動(「起立着席」)を試行してみたところ、78.2[%]の識別率が得られた。
【0083】
次に、動作については、継続した「弱」、継続した「強」、「弱」と「強」とを交互に繰り返す動作、「弱」と「立位(静止)」とを交互に繰り返す動作について試行して認識率を算出した。
この結果、継続した「弱」、「弱」と「強」とを交互に繰り返す動作については認識率100[%]であり、継続した「強」、「弱」と「立位(静止)」とを交互に繰り返す動作についても、それぞれ77.7[%],68.3[%]の認識率が得られた。
【0084】
次に、行動については、前方への「転倒」、後方への「転倒」、左方への「転倒」、右方への「転倒」、「寝返り」、「離床(起床)」について試行して認識率を算出した。また、各転倒については、記憶された動作推移を確認して転倒方向の識別率も算出した。
この結果、「寝返り」、「離床(起床)」については認識率100[%]であり、左方への「転倒」、右方への「転倒」については認識率だけでなく転倒方向の認識率も100[%]であった。また、前方への「転倒」、後方への「転倒」については認識率がそれぞれ90.4[%],95.0[%]であり転倒方向の認識率がそれぞれ85.7[%],95[%]であった。
【0085】
この結果、実施例1の前記行動認識システム1は、対象者(被験者、健常者)全員に共通した各メンバシップ関数f1〜f13や各動作コンテキストc1〜c3を設定したが、センサタグ4,4から送信された加速度データ等を含む情報の受信信号に基づいて、各対象者の動作や行動を判別できることがわかる。すなわち、実施例1の前記行動認識システム1は、人間の単純な姿勢や動作だけでなく、動作の連続性から判別可能な人間の行動を認識することができることがわかる。
なお、前記実験では、7人の被験者全員が同様の体格であったため、被験者全員に共通する各メンバシップ関数f1〜f13等を設定したが、同様の体格であれば同じ各メンバシップ関数f1〜f13等であっても各対象者の動作や行動を判別できることがわかる。なお、各対象者に応じて最適の各メンバシップ関数f1〜f13等を設定すれば、前記実験より高い認識率で各対象者の動作や行動を判別できることが期待できる。
したがって、実施例1の前記行動認識システム1では、サーバSVの管理者は、認識された各対象者の姿勢や動作や行動と、記憶された各対象者の情報に基づく生活パターン等から、これらが複合した異常事態(例えば、転倒したまま長時間起き上がらないの事態や、火災等の非難時に倒れて逃げ遅れている事態等)や体調不良(例えば、昼間の活動量が普段より少ない、昼間もずっと寝込んでいる)を確認する(看視する、見守る)ことができる。
【0086】
また、実施例1では、室内全域がアクセスポイント3,3の受信範囲内であるため、室内のセンサタグ4,4からの前記受信信号は常にサーバ2に転送可能であり、対象者がアクセスポイント3,3に対して身体の向きや姿勢が任意に変化しても前記受信信号は常にサーバ2に転送できる。
したがって、実施例1の前記行動認識システム1は、ステレオ視の死角が発生したり室内の照明環境によって判別ミスが発生する特許文献1〜3等の構成に比べ、人間の動作の判別ミスを低減し易くすることができる。
特に、実施例1では、暗闇でも対象者の動作を判別できるため、例えば、照明を落とした夜間の室内や、夜間の屋外でも対象者の動作の推移を記憶したり、行動を認識したりすることができる。
この結果、実施例1の前記行動認識システム1では、人間の動作の判別ミスを低減し易くしつつ、人間の動作の連続性から判別可能な行動を認識することができる。
【0087】
ここで、特許文献1〜3に記載の技術では、カメラに複数の人間の撮像対象(複数のユーザの顔や手)が撮像された場合、各ユーザの顔や手を別々に追跡する必要があるが、例えば、2人以上のユーザの顔や手が追跡不能になった後、再び追跡可能となった場合には、撮像された画像から個人を特定することが困難であるため、複数の人間の動作を判別し難いという問題があった。
これに対して、前記構成を備えた実施例1の前記行動認識システム1では、前記受信情報にセンサタグIDが含まれているため、センサタグIDで各対象者を特定することができる。この結果、実施例1の前記行動認識システム1は、複数の人間から個人を特定することが困難な特許文献1〜3の構成に比べ、複数の人間が動作した場合に動作した人物を容易に特定することができる。
【0088】
また、特許文献1〜3に記載の技術では、撮像対象を追跡可能な範囲を拡張するには、複数台のカメラをステレオ視可能な状態で配置してゆく必要があるため、ユーザの動作を判別可能な範囲を拡張するには、コストがかかり過ぎるという問題があった。
これに対して、前記構成を備えた実施例1の前記行動認識システム1では、前記受信情報にアクセスポイントIDとRSSI値とが含まれている。このため、アクセスポイント3,3を複数台に増設して対象者の動作を判別する範囲を拡大した場合に、アクセスポイントIDとRSSI値によって各対象者の加速度データを転送した位置(各アクセスポイント3,3からの距離)を特定できる。
【0089】
この結果、実施例1の前記行動認識システム1は、対象者の動作や行動を判別可能な範囲を拡張することができ、高額なカメラをステレオ視可能な状態で増設してゆく必要がある特許文献1〜3の構成に比べ、人間の動作や行動を判別可能な範囲を拡張するコストを低減することができる。
特に、実施例1では、センサタグ4,4は、ZigBee(登録商標)ネットワーク6を介して、アクセスポイント3,3と接続されており、他の無線通信規格の端末に比べても安価で増設することができ、拡張コストをさらに低減することができる。
【0090】
また、前記構成を備えた実施例1の前記行動認識システム1では、サーバ2に記憶された受信時期ごとの動作の推移と行動とが表示された行動表示画像101をディスプレイ2bに表示することが可能になっている。よって、実施例1の前記行動認識システム1は、記憶された動作や行動をサーバ2の管理者が行動表示画像101で確認する(看視する、見守る)ことが可能となっている。
【実施例2】
【0091】
次に、本発明の実施例2の説明をするが、この実施例2の説明において、前記実施例1の構成要素に対応する構成要素には同一の符号を付して、その詳細な説明を省略する。
この実施例2は、下記の点で前記実施例1と相違しているが、他の点では前記実施例1と同様に構成されている。
【0092】
図11は実施例1の図1に対応する説明図であって実施例2の行動認識システムの全体説明図である。
図11において、実施例2の前記行動認識システム1′は、実施例1の前記サーバ(行動表示装置、動作推移記憶装置)2を有する。また、前記行動認識システム1′は、実施例1の前記アクセスポイント3,3が省略されており、実施例1の前記センサタグ4,4に替えて、前記対象者が携帯する携帯端末(端末、行動認識用の端末、行動認識装置)4′,4′とを有する。実施例2では、前記携帯端末4′,4′は、第3の情報通信回線の一例としての携帯電話網(移動通信ネットワーク)5′を介して、前記サーバ2と接続されている。
また、実施例2の前記携帯端末4′,4′は、実施例1と同様に対象者の腰の位置に装着されており、実施例1の加速度センサ4a,4aと、GPS(Global Positioning System、全地球測位システム)衛星からの情報を受信可能なGPS受信機4b,4bとを有する。
【0093】
(実施例2の制御部の説明)
(実施例2の携帯端末4′,4′の制御部の説明)
図12は実施例1の図2に対応する説明図であって実施例2の行動認識システムのサーバと携帯端末との各制御部が備えている各機能をブロック図(機能ブロック図)で示した図である。
図12において、前記携帯端末4′,4′の制御部は、I/O、ROM、RAM、CPU、クロック発振器等を有し、前記構成の携帯端末ZS1は、ソリッドステートドライブ(SSD)やROM等に記憶されたプログラムを実行することにより種々の機能を実現することができる。
前記制御部には、オペレーティングシステムOS、アプリケーションプログラムとしての行動認識プログラムAP1′、その他の図示しないソフトウェアが記憶されている。
【0094】
(実施例2の行動認識プログラムAP1′の説明)
実施例2の前記行動認識プログラムAP1′は、実施例1の前記動作情報記憶手段C4、前記割合演算手段C5、前記判別値演算手段C6、前記動作判別手段C7、前記動作推移記憶手段C8、前記行動情報記憶手段C9、前記行動判別手段C10、前記行動認識情報記憶手段C11を有する。また、前記行動認識プログラムAP1′は、実施例1の前記端末情報記憶手段CS1、前記受信情報記憶手段C3、前記行動表示手段C12に替えて、端末情報記憶手段CS1′、取得情報記憶手段C3′、行動送信手段C13を有する。
【0095】
CS1′:端末情報記憶手段(識別情報記憶手段、携帯端末ID記憶手段、端末識別情報記憶手段)
端末情報記憶手段CS1′は、携帯端末4′,4′ごとに予め設定された端末ID(端末情報、端末識別情報)を記憶する。
C3′:取得情報記憶手段
取得情報記憶手段C3′は、加速度センサ4a,4aから加速度データを取得した時期(タイムスタンプ)を記憶する取得時期記憶手段(タイムスタンプ記憶手段)C3A′と、GPS受信機4b,4bがGPS衛星から受信した情報から位置データ(位置情報)を演算する位置情報演算手段C3B′とを有し、加速度センサ4a,4aから取得した加速度データと時期とを対応付けて記憶する。すなわち、実施例2の前記取得情報記憶手段C3′には、取得した時期ごとに、加速度データ、位置データが記憶される。
なお、実施例2の前記動作情報記憶手段C4、前記割合演算手段C5、前記動作判別手段C7、前記動作推移記憶手段C8、前記行動認識情報記憶手段C11については、「前記受信情報記憶手段C3」を「前記取得情報記憶手段C3′」、「センサタグID」を「端末ID」に読み替えるだけで、実施例1と同様の説明になるため、詳細な説明については省略する。
【0096】
C13:行動送信手段(動作推移送信手段)
行動表示手段C13は、実施例1の前記行動認識情報通報手段C12Dを有し、前記行動判別手段C10によって判別された対象者の行動を送信する。実施例2の前記行動送信手段C13は、前記行動認識情報通報手段C12Dによって実施例1と同様の情報を通報先に通報すると共に、前記端末情報記憶手段CS1′に記憶された端末IDと、前記受信情報記憶手段C3′に記憶された1時間分の加速度データおよび位置データと、前記動作推移記憶手段C8に記憶された1時間分の対象者の動作の推移と、前記行動認識情報記憶手段C11に記憶された1時間分の行動認識情報とを1時間ごとにサーバ2に送信する。
【0097】
(実施例2のサーバ2の制御部の説明)
また、実施例2の前記サーバ2のコンピュータ本体2aの制御部には、実施例1の前記行動認識プログラムAP1に替えて、アプリケーションプログラムとしての行動表示プログラム(動作推移記憶プログラム)AP2が記憶されている。
【0098】
(実施例2の行動表示プログラムAP2の説明)
前記行動表示プログラムAP2は、端末IDに基づいて対象者を特定する実施例1と同様の前記特定手段C1と、下記の機能手段(プログラムモジュール)を有する。
C14:行動受信手段(動作推移受信手段)
行動受信手段C14は、前記行動送信手段C13から送信された情報(端末ID、1時間分の加速度データと位置データ、1時間分の対象者の動作の推移、1時間分の行動認識情報)を受信する。
C15:受信情報記憶手段(動作推移記憶手段)
受信情報記憶手段C15は、前記行動受信手段C14によって受信した前記情報を記憶する。
【0099】
C16:行動表示手段(動作推移表示手段)
行動表示手段C16は、実施例1の前記行動表示画像表示手段C12Aと、前記動作推移表示手段C12Bと、前記行動認識情報表示手段C12Cとを有し、前記受信情報記憶手段C15に記憶された対象者の行動を表示する。
なお、実施例2の動作推移表示部101a(図6参照)には、実施例1のRSSI値に基づく距離に替えて、対象者の位置を特定する図示しない地図画像のアドレス情報(例えば、ホームページへのハイパーリンク等)が表示される。
【0100】
(実施例2のフローチャートの説明)
次に、実施例2の前記各制御部の各プログラムの処理の流れをフローチャートを使用して説明する。なお、携帯端末4′,4′がサーバ2に情報を送信する処理については、端末ID、1時間分の加速度データと位置データ、1時間分の対象者の動作の推移、1時間分の行動認識情報を1時間ごとに送信するだけであるため、説明の簡単のため、図示および詳細な説明を省略する。
【0101】
(実施例2の動作推移記憶処理の説明)
図13は実施例1の図7に対応する説明図であって実施例2の動作推移記憶処理のフローチャートである。
図13に示す実施例2の動作推移記憶処理のフローチャートは、実施例1の前記動作推移記憶処理のフローチャートのST101とST102とに替えて、以下のST101′とST102′とを実行するだけである。よって、その他のST103〜ST106については実施例1と同様であるため、詳細な説明を省略する。
図13のST101′において、加速度センサ4aが加速度データを検出したか否かを判別する。イエス(Y)の場合はST102′に移り、ノー(N)の場合はST101′を繰り返す。
ST102′において、検出した時期と加速度データとを対応付けて記憶する。そして、ST103〜ST106の各処理を実行して、ST101に戻る。
【0102】
(実施例2の作用)
前記構成を備えた実施例2の前記行動認識システム1′では、携帯端末4′,4′において、図13、図8に示す動作推移記憶処理および動作判別処理と、図9、図10に示す行動認識処理および行動判別処理とが実行され、対象者の動作の推移と対象者の行動とが記憶されて通報先に通報される。
したがって、実施例2の前記行動認識システム1′では、加速度センサ4a,4aが設けられた携帯端末4′,4′で対象者の動作や行動を判別することができ、対象者が携帯電話網5′の通話エリア外に移動してサーバ2に情報を送信できない場合でも、対象者の動作や行動を判別することができる。
【0103】
また、前記構成を備えた実施例2の前記行動認識システム1′では、サーバ2において、携帯端末4′,4′から送信された対象者の動作の推移や行動等の情報が受信されて記憶され、対象者ごとの行動表示画像101をディスプレイ2bに表示することが可能となっている。
したがって、実施例2の前記行動認識システム1′では、携帯端末4′,4′で判別された動作や行動を記憶容量の大きいサーバ2に記憶でき、実施例1と同様に、記憶した動作や行動をサーバ2の管理者が行動表示画像101で確認する(看視する、見守る)ことが可能となっている。
また、前記構成を備えた実施例2の前記行動認識システム1′では、サーバ2の前記受信情報にGPS受信機4b,4bがGPS衛星から受信した情報に基づく位置データとが含まれており、実施例1と同様に、各対象者の加速度データを検出した位置(動作や行動が判別された位置)を特定できる。
その他、実施例2の前記行動認識システム1′は、実施例1の前記行動認識システム1と同様の作用効果を奏する。
【0104】
(変更例)
以上、本発明の実施例を詳述したが、本発明は、前記実施例に限定されるものではなく、特許請求の範囲に記載された本発明の要旨の範囲で、種々の変更を行うことが可能である。本発明の変更例(H01)〜(H021)を下記に例示する。
(H01)前記実施例では、対象者の動作の推移に基づいて、対象者の3種類の行動(「転倒」、「寝返り」、「離床(起床)」を判別したが、動作コンテキストを追加することによりその他の行動(例えば、「起立」、「着席」、「躓き」、「体当たり」、「着床」等)を判別することも可能である。
(H02)前記実施例では、対象者の行動が判別された場合に通報先に通報したが、これに限定されず、行動がない場合にも通報することが可能である。例えば、長時間同じ「臥位」が継続している場合に、「倒れ込んで起きる気配がない」と判断して通報することも可能である。
【0105】
(H03)前記実施例では、姿勢を含む動作として「立位」、「座位」、前後左右の「臥位」等を判別したが、これに限定されず、例えば、姿勢として「立位」、「座位」、前後左右の「臥位」等を判別し、動作として「静止」、「歩行」、「走行」を判別することも可能である。
(H04)前記実施例では、前後左右の「臥位」等を判別し、「立位」、「座位」については1種類しか判別していないが、これに限定されず、前後左右に傾斜した「立位」、「座位」と通常の(中立の)「立位」、「座位」の5種類の「立位」、「座位」を判別することも可能である。
【0106】
(H05)前記実施例1では、センサタグIDが異なるセンサタグ4,4とアクセスポイントIDが異なるアクセスポイント3,3とが2台ずつの構成としたが、これに限定されず、1台またはセンサタグIDが異なる3台以上のセンサタグと1台またはアクセスポイントIDが異なる3台以上のアクセスポイントとの構成でも各対象者の動作や行動を判別することが可能である。また、前記実施例2についても同様に、端末IDが異なる携帯端末4′,4′が2台の構成としたが、これに限定されず、1台または端末IDが異なる3台以上の携帯端末の構成でも各対象者の動作や行動を判別することが可能である。なお、複数のアクセスポイントでIDが同一のセンサタグや携帯端末から情報を受信した場合には、RSSI値が最大となるアクセスポイントが、センサタグや携帯端末から最も近いアクセスポイントであると判別できる。
(H06)前記実施例のように、センサタグ4や携帯端末4′をバックル部分に固定支持することが好ましいが、これに限定されず、例えば、胸ポケットに入れた場合でも、対象者の動作や行動を判別することが可能である。この場合、対象者のメンバシップ関数f1〜f13や動作コンテキストc1〜c3を胸の加速度センサ4aからの加速度に対応できるように設定する必要がある。
【0107】
(H07)前記実施例1では、センサタグ4,4からは、各対象者の動作や行動に関する情報として、加速度センサ4a,4aから検出された加速度データを送信したが、各対象者の動作や行動に関する情報についてはこれに限定されず、例えば、センサタグ4,4に体温計や脈拍計等を設けて、体温計や脈拍計が測定した各対象者の体温や脈拍等の情報を送信することも可能である。また、例えば、特許文献1〜3に記載の公知のカメラのステレオ視を用いたジェスチャ認識システムと組み合わせて、腰に装着した加速度センサ4a,4aからの加速度では判別し難い動作(例えば、任意の姿勢で静止した状態で首振り、手振り、指差し等のジェスチャ)を判別して、画像解析に基づいて判別された動作の推移と加速度に基づいて判別された動作の推移とを組み合わせた行動を判別することも可能である。この場合、例えば、寝た状態で動けなくなった対象者(例えば、寝たきりの患者や、転倒で怪我をして起き上がれなくなった人等)がカメラに向かって手を振って救助を求めていることを判別したり、ジェスチャに応じて家電製品等を制御したりすることが可能となる。
【0108】
(H08)前記実施例1では、各センサタグ4,4に1個の加速度センサ4a,4aを設けて加速度データを送信したが、各センサタグ4,4に設ける加速度センサの数については1個に限定されず、対象者の異なる部位の加速度を検出する複数の加速度センサを各センサタグ4,4に設けることも可能である。例えば、腰に装着した各センサタグ4,4と有線で接続されて対象者の胸に貼り付けられる胸用の加速度センサを増設することも可能である。この場合、腰と胸の加速度センサ4aからの各加速度に基づいて、各メンバシップ値STAND〜RUNが演算できるように対象者のメンバシップ関数f1〜f13や動作コンテキストc1〜c3を設定する必要がある。
【0109】
(H09)前記実施例1では、アクセスポイント3,3とサーバ2とが無線LAN5によって接続されていたが、これに限定されず、例えば、インターネットや、有線LAN、携帯電話網5′等の移動体通信網、アドホックネットワーク(自律分散型無線通信網、自律分散型無線ネットワーク、自立分散型無線ネットワーク)、専用回線等の情報通信回線で接続することも可能である。また、センサタグ4,4とアクセスポイント3,3とがZigBee(登録商標)ネットワーク6によって接続されていたが、これに限定されず、例えば、携帯電話網5′等の移動体通信網、アドホックネットワーク、Bluetooth(登録商標)等のその他の無線通信技術により接続することも可能である。また、前記実施例2では、携帯端末4′,4′とサーバ2とが携帯電話網5′によって接続されていたが、これに限定されず、例えば、無線LAN5、アドホックネットワーク、Bluetooth(登録商標)等のその他の無線通信技術により接続することも可能である。
【0110】
(H010)前記実施例1では、各アクセスポイント3,3を各室内に配置していたが、これに限定されず、アクセスポイントIDの異なる複数台のアクセスポイントを室内に配置することも可能である。この場合、例えば、RSSI値に基づいて、センサタグから最も近いアクセスポイントが転送した情報で行動認識することが可能である。また、例えば、RSSI値に基づく各距離で室内のどの位置(座標)に対象者が存在するかを判別することも可能である。
(H011)前記実施例では、50[ms]ごとに加速度データを検出したが、加速度データを検出する周期については任意に変更可能である。
(H012)前記実施例1では、アクセスポイント4からサーバ2に対して、加速度データや、センサタグID、アクセスポイントID、RSSI値を含む情報を送信したが、これに限定されず、例えば、センサタグ4から受信したバッテリ残量の情報についても送信可能である。この場合、サーバ2でセンサタグ4のバッテリ残量を監視することが可能となる。
【0111】
(H013)前記実施例のように、対象者ごとにメンバシップ関数f1〜f13や動作コンテキストc1〜c3を設定、記憶して対象者の動作を精度良く判別することが好ましいが、例えば、万人に適用可能なメンバシップ関数f1〜f13や動作コンテキストc1〜c3を1つだけ設定、記憶したり、性別の体格差に応じて設定、記憶したり、身長・体重等の体格モデルに応じて設定、記憶したりして対象者の動作を判別することも可能である。
(H014)前記実施例では、3軸の加速度ベクトルa1〜a50に基づく分散σ2や差分Δaと各メンバシップ値STOP,MOVE,WALK,RUNとを対応付ける各メンバシップ関数f12,f13を設定、記憶して対象者の動作を判別したが、これに限定されず、例えば、前後方向への「移動」や「転倒」等のみを判別する場合には、X軸方向の加速度ax1〜ax50に基づく分散(σx2)や差分(Δax)と各メンバシップ値STOP,MOVE,WALK,RUNとを対応付ける各メンバシップ関数(fx12),(fx13)を設定、記憶して対象者の動作を判別することも可能である。
【0112】
(H015)前記実施例の前記行動判別処理(図10参照)では、「転倒」を判別する場合に、20秒以上連続する動作が変化した際の直前の2.5秒間に「移動」且つ「強」であるか否かを判別することにより、加速度の急激な変化があったか否かを判別したが、例えば、変化する直前の加速度の急激な変化をさらに詳細に解析するために、分散σ2が分散閾値(例えば、0.2)を超えるか否かを判別したり、差分Δaが差分閾値(例えば、2)を超えるか否かを判別したりすることも可能である。また、例えば、「転倒」を判別する場合であっても、「寝返り」や「離床(起床)」を判別する場合と同様に、20秒以上連続する動作が変化したか否かのみ判別して、直前の加速度の急激な変化を判別条件とせずに対象者の行動を判別することも可能である。また、前記実施例では、「寝返り」や「離床(起床)」を判別する場合に、加速度の変化については判別条件としていないが、これに限定されず、「転倒」を判別する場合と同様に、加速度の変化を解析して判別条件に追加とすることも可能である。
【0113】
(H016)前記実施例では、判別された対象者の動作の推移や行動を記録したり、動作の推移や行動を行動表示画像101に表示したり、行動を通報したりしたが、判別された対象者の動作や行動の利用方法についてはこれに限定されず、例えば、判別された対象者の動作や行動に応じて、ロボットを制御することも可能である。この場合、例えば、ロボット機器を制御するソフトウエアモジュールの規格群であるRTミドルウェア(RT-middleware、RT:Robotics Technologies)を介して、ロボットに対象者の動作や行動に応じた動作や行動や挨拶や対話をさせたり、異常事態等が発生した場合にロボットから通報や呼びかけ等をさせたりすることも可能である。また、例えば、大量のデータからパターン認識等の技術で知識を抽出する技術であるデータマイニング(Data mining)によって、記憶した対象者の動作や行動のパターン(属性)等を解析して、複数の対象者をグループ化したり、各対象者の要求に合致したサービスを提案することに利用したりすることも可能である。この場合、行動量を抽出するために、例えば、端末(センサタグ4や携帯端末4′)に行動量計を設けて行動量計が測定した行動量データを送受信したり、記憶した動作の推移等に基づいて行動量を演算したりする構成が必要となる。なお、RTミドルウェアについては、例えば、特開2007−193736号公報等に記載されており、データマイニングについては、例えば、特開2007−257335号公報等に記載されており、それぞれ公知である。
【0114】
(H017)前記実施例において、予め設定された各数値(例えば、RSSI値の−128[dBm]や+128[dBm]、アクセスポイント3,3の受信可能な半径約30[m]、加速度ベクトルa1〜a50の直前50[個]や17[個]、各動作コンテキストc1〜c3の20[秒]や2.5[秒]、行動表示手段C13の1時間等)については任意の数値に変更することが可能である。
(H018)前記実施例2のように、携帯端末4′,4′から定期的に記憶した情報(加速度データ、判別された動作、行動等)をサーバ2に転送する構成では、携帯端末4′,4′が転送済みの情報を削除することも可能である。この場合、携帯端末4′,4′において、行動認識プログラムAP1′に関する記憶容量を低減することができ、小型である替わりに記憶容量が少ない記憶媒体を選択して携帯端末4′,4′全体を小型化することができる。
【0115】
(H019)前記実施例2のように、携帯端末4′,4′から定期的に記憶した情報(加速度データ、判別された動作、行動等)をサーバ2に転送する構成が記憶容量やバックアップの観点からは好ましいが、サーバ2を省略して、行動を認識した場合にのみ通報する構成とすることも可能である。すなわち、動作の推移や行動のログをサーバ2に転送しない構成も可能である。この場合、サーバ2と携帯端末4′,4′との間の情報の送受信(携帯電話網3)が省略されるため、行動認識システム1′の通信負荷を低減できる。
(H020)前記実施例2では、携帯端末4′,4′によって対象者の動作や行動を認識したが、携帯端末4′,4′は行動認識用の専用端末に限定されず、例えば、GPS機能付き携帯電話やスマートフォンやタブレットPC等によって構成することも考えられる。
(H021)前記実施例2では、GPS受信機4b,4bがGPS衛星から受信した情報から位置データ(位置情報)を演算したが、携帯端末4′,4′で位置データを取得する方法についてはこれに限定されず、例えば、携帯電話網5′の基地局から受信する情報に基づいて位置データを演算することも可能である。
【符号の説明】
【0116】
σ2…分散、Δa…差分、4a,4a…加速度センサ、2…コンピュータ、行動認識用の処理装置、(4,4),(4′,4′)…端末、行動認識用の端末、AP1,AP1′…行動認識プログラム、a1〜a50…加速度ベクトル、ax〜az…加速度、CS2…送信手段、C1:特定手段、C2…受信手段、C4A…姿勢情報記憶手段、C7…動作判別手段、C8…動作推移記憶手段、C9…行動情報記憶手段、C10…行動判別手段。
【特許請求の範囲】
【請求項1】
コンピュータを、
人が携帯可能な端末に設けられて加速度を検出可能な加速度センサで検出される加速度と、前記端末を携帯した人の姿勢と、を対応づける情報が予め記憶された姿勢情報記憶手段、
前記加速度センサで検出された加速度と、前記姿勢情報記憶手段に記憶された情報とに基づいて、前記端末を携帯した人の動作を判別する動作判別手段、
前記動作の推移を記憶する動作推移記憶手段、
前記動作の推移と、前記端末を携帯した人の行動と、を対応づける情報が予め記憶された行動情報記憶手段、
前記動作の推移と前記行動情報記憶手段に記憶された情報とに基づいて、前記端末を携帯した人の行動を判別する行動判別手段、
として機能させるための行動認識プログラム。
【請求項2】
前記動作判別手段は、直交する3軸のそれぞれの方向の加速度を検出する前記加速度センサで検出された加速度に基づいて、前記端末を携帯した人の姿勢を判別すると共に、加速度ベクトルの分散に基づいて、前記端末を携帯した人の静止および移動のいずれかを判別し、且つ、前記加速度センサで検出された加速度ベクトルの最大値と最小値との差分に基づいて、前記端末を携帯した人の動作の激しさを判別し、前記姿勢と、静止または移動と、動作の激しさと、に基づいて、前記端末を携帯した人の動作を判別する、
ことを特徴とする請求項1に記載の行動認識プログラム。
【請求項3】
前記端末に設けられた送信手段から無線送信された加速度の情報を受信する受信手段、
を備えたことを特徴とする請求項1または2に記載の行動認識プログラム。
【請求項4】
前記端末を識別する識別情報に基づいて、前記端末を携帯した人を特定する特定手段、
を備えたことを特徴とする請求項1ないし3のいずれかに記載の行動認識プログラム。
【請求項5】
加速度を検出可能な加速度センサを備え、人が携帯可能な行動認識用の端末であって、
前記加速度センサで検出される加速度と前記端末を携帯した人の姿勢とを対応づける情報が予め記憶された姿勢情報記憶手段と、前記加速度センサで検出された加速度と前記姿勢情報記憶手段に記憶された情報とに基づいて、前記端末を携帯した人の動作を判別する動作判別手段と、前記動作の推移を記憶する動作推移記憶手段と、前記動作の推移と前記端末を携帯した人の行動とを対応づける情報が予め記憶された行動情報記憶手段と、前記動作の推移と前記行動情報記憶手段に記憶された情報とに基づいて、前記端末を携帯した人の行動を判別する行動判別手段と、を有する行動認識用の処理装置との間で、情報の送受信が可能である
ことを特徴とする前記行動認識用の端末。
【請求項6】
加速度を検出可能な加速度センサを備え、人が携帯可能な端末との間で情報の送受信が可能な行動認識用の処理装置であって、
前記加速度センサで検出される加速度と前記端末を携帯した人の姿勢とを対応づける情報が予め記憶された姿勢情報記憶手段と、
前記加速度センサで検出された加速度と前記姿勢情報記憶手段に記憶された情報とに基づいて、前記端末を携帯した人の動作を判別する動作判別手段と、
前記動作の推移を記憶する動作推移記憶手段と、前記動作の推移と前記端末を携帯した人の行動とを対応づける情報が予め記憶された行動情報記憶手段と、
前記動作の推移と前記行動情報記憶手段に記憶された情報とに基づいて、前記端末を携帯した人の行動を判別する行動判別手段と、
を備えたことを特徴とする前記行動認識用の処理装置。
【請求項1】
コンピュータを、
人が携帯可能な端末に設けられて加速度を検出可能な加速度センサで検出される加速度と、前記端末を携帯した人の姿勢と、を対応づける情報が予め記憶された姿勢情報記憶手段、
前記加速度センサで検出された加速度と、前記姿勢情報記憶手段に記憶された情報とに基づいて、前記端末を携帯した人の動作を判別する動作判別手段、
前記動作の推移を記憶する動作推移記憶手段、
前記動作の推移と、前記端末を携帯した人の行動と、を対応づける情報が予め記憶された行動情報記憶手段、
前記動作の推移と前記行動情報記憶手段に記憶された情報とに基づいて、前記端末を携帯した人の行動を判別する行動判別手段、
として機能させるための行動認識プログラム。
【請求項2】
前記動作判別手段は、直交する3軸のそれぞれの方向の加速度を検出する前記加速度センサで検出された加速度に基づいて、前記端末を携帯した人の姿勢を判別すると共に、加速度ベクトルの分散に基づいて、前記端末を携帯した人の静止および移動のいずれかを判別し、且つ、前記加速度センサで検出された加速度ベクトルの最大値と最小値との差分に基づいて、前記端末を携帯した人の動作の激しさを判別し、前記姿勢と、静止または移動と、動作の激しさと、に基づいて、前記端末を携帯した人の動作を判別する、
ことを特徴とする請求項1に記載の行動認識プログラム。
【請求項3】
前記端末に設けられた送信手段から無線送信された加速度の情報を受信する受信手段、
を備えたことを特徴とする請求項1または2に記載の行動認識プログラム。
【請求項4】
前記端末を識別する識別情報に基づいて、前記端末を携帯した人を特定する特定手段、
を備えたことを特徴とする請求項1ないし3のいずれかに記載の行動認識プログラム。
【請求項5】
加速度を検出可能な加速度センサを備え、人が携帯可能な行動認識用の端末であって、
前記加速度センサで検出される加速度と前記端末を携帯した人の姿勢とを対応づける情報が予め記憶された姿勢情報記憶手段と、前記加速度センサで検出された加速度と前記姿勢情報記憶手段に記憶された情報とに基づいて、前記端末を携帯した人の動作を判別する動作判別手段と、前記動作の推移を記憶する動作推移記憶手段と、前記動作の推移と前記端末を携帯した人の行動とを対応づける情報が予め記憶された行動情報記憶手段と、前記動作の推移と前記行動情報記憶手段に記憶された情報とに基づいて、前記端末を携帯した人の行動を判別する行動判別手段と、を有する行動認識用の処理装置との間で、情報の送受信が可能である
ことを特徴とする前記行動認識用の端末。
【請求項6】
加速度を検出可能な加速度センサを備え、人が携帯可能な端末との間で情報の送受信が可能な行動認識用の処理装置であって、
前記加速度センサで検出される加速度と前記端末を携帯した人の姿勢とを対応づける情報が予め記憶された姿勢情報記憶手段と、
前記加速度センサで検出された加速度と前記姿勢情報記憶手段に記憶された情報とに基づいて、前記端末を携帯した人の動作を判別する動作判別手段と、
前記動作の推移を記憶する動作推移記憶手段と、前記動作の推移と前記端末を携帯した人の行動とを対応づける情報が予め記憶された行動情報記憶手段と、
前記動作の推移と前記行動情報記憶手段に記憶された情報とに基づいて、前記端末を携帯した人の行動を判別する行動判別手段と、
を備えたことを特徴とする前記行動認識用の処理装置。
【図1】


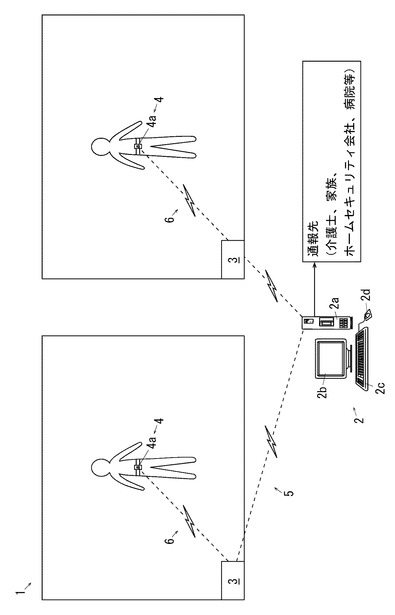
【図2】
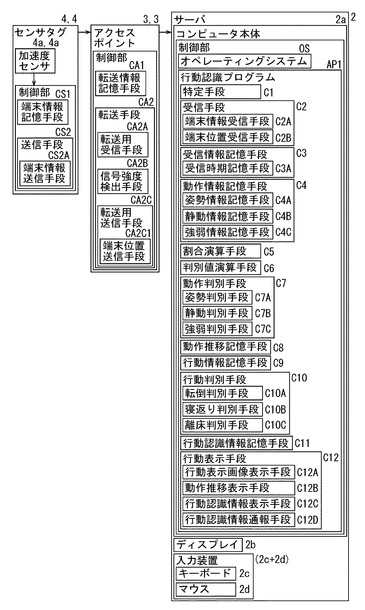
【図3】
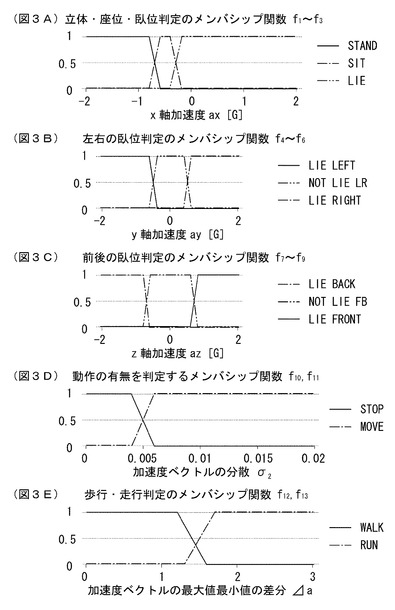
【図5】
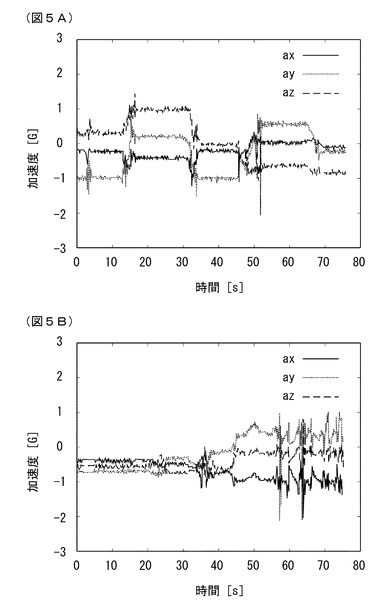
【図6】
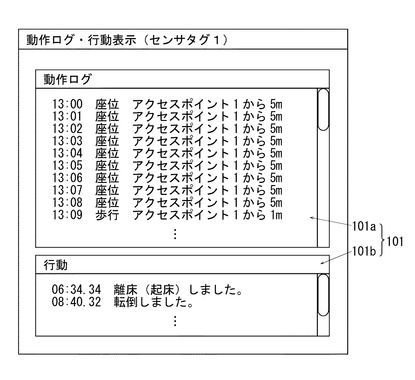
【図7】
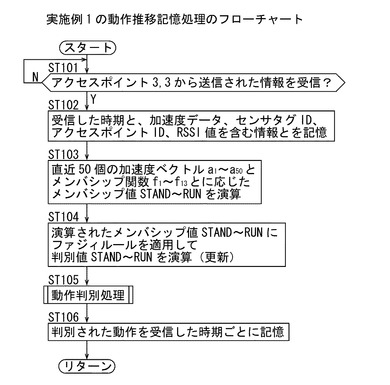
【図8】
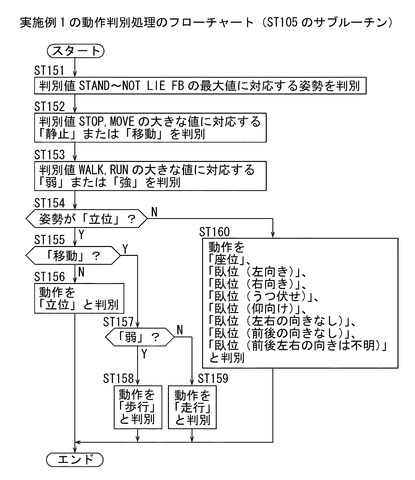
【図9】
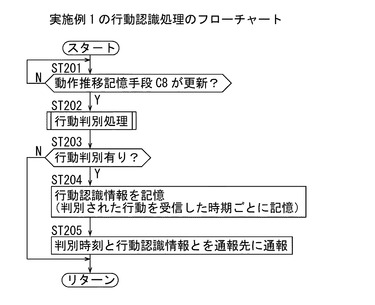
【図10】
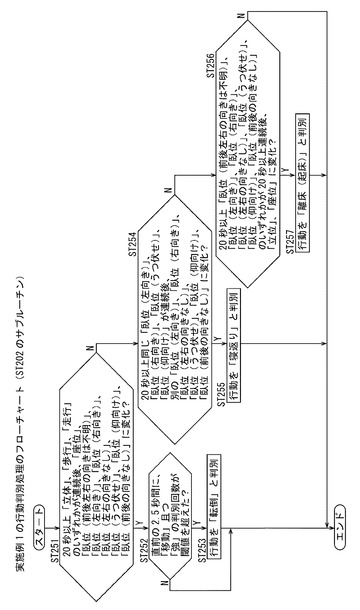
【図11】
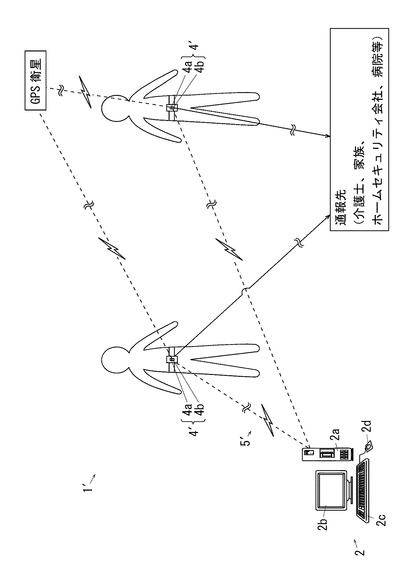
【図12】
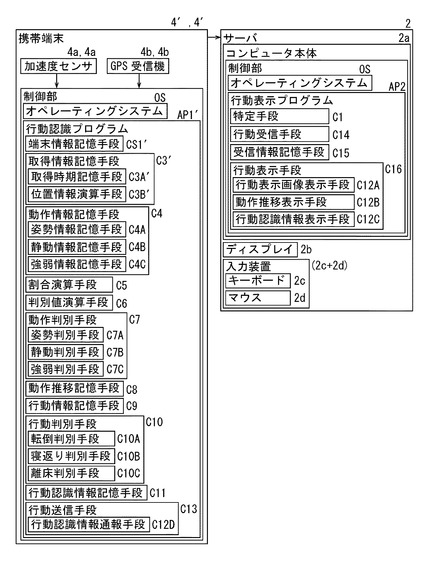
【図13】
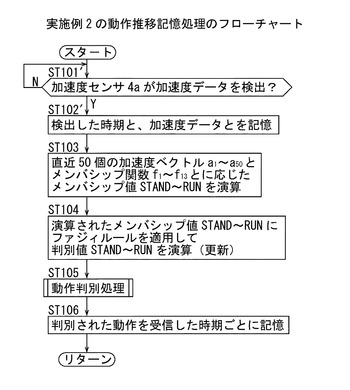
【図4】
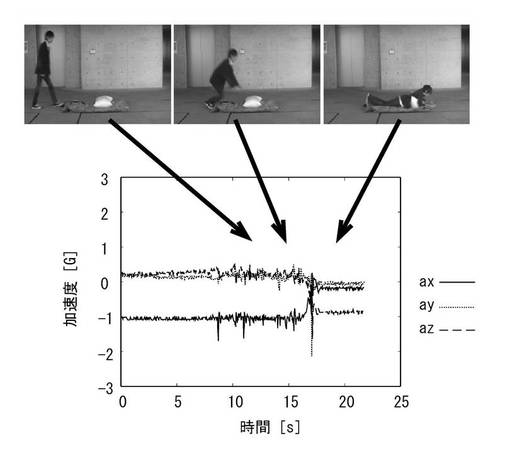
【図2】
【図3】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図4】
【公開番号】特開2013−99433(P2013−99433A)
【公開日】平成25年5月23日(2013.5.23)
【国際特許分類】
【出願番号】特願2011−244951(P2011−244951)
【出願日】平成23年11月8日(2011.11.8)
【出願人】(305027401)公立大学法人首都大学東京 (385)
【出願人】(511019281)株式会社システムクラフト (2)
【Fターム(参考)】
【公開日】平成25年5月23日(2013.5.23)
【国際特許分類】
【出願日】平成23年11月8日(2011.11.8)
【出願人】(305027401)公立大学法人首都大学東京 (385)
【出願人】(511019281)株式会社システムクラフト (2)
【Fターム(参考)】
[ Back to top ]