
行動認識装置、行動認識方法及びプログラム
【課題】実験動物の各部位の行動をより詳細に定量化する。
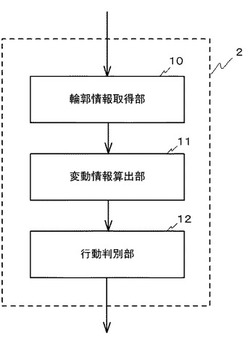
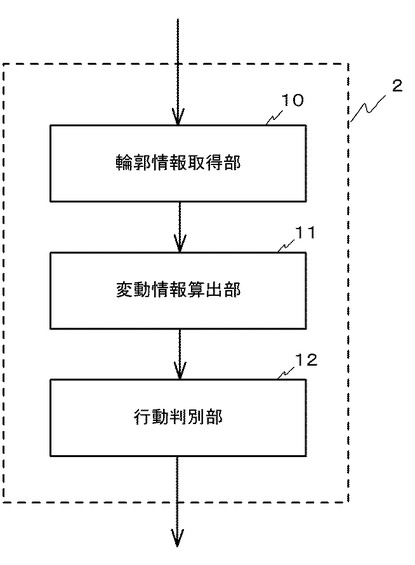
【解決手段】輪郭情報取得部10は、撮像部で撮像されるマウスの撮像画像に基づいて、その撮像画像におけるマウスの重心位置を基準として極座標変換されたマウスの輪郭情報を逐次取得する。変動情報算出部11は、輪郭情報取得部10により逐次取得されたマウスの輪郭情報を、例えば、頭部、尾部、右胴体部、左胴体部等の部位単位で分割し、分割された部位毎にマウスの輪郭情報の変動に関する情報を算出する。行動判別部12は、変動情報算出部11によって算出された各部位の輪郭情報の変動に関する情報に基づいて、マウスの行動を判別する。
【解決手段】輪郭情報取得部10は、撮像部で撮像されるマウスの撮像画像に基づいて、その撮像画像におけるマウスの重心位置を基準として極座標変換されたマウスの輪郭情報を逐次取得する。変動情報算出部11は、輪郭情報取得部10により逐次取得されたマウスの輪郭情報を、例えば、頭部、尾部、右胴体部、左胴体部等の部位単位で分割し、分割された部位毎にマウスの輪郭情報の変動に関する情報を算出する。行動判別部12は、変動情報算出部11によって算出された各部位の輪郭情報の変動に関する情報に基づいて、マウスの行動を判別する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、実験動物の行動を自動的に認識する行動認識装置、行動認識方法及びプログラムに関する。
【背景技術】
【0002】
マウスなどの実験動物は、新薬開発、毒性試験など様々な医用用途で用いられている。動物の疾病の程度をin vivoレベルで定量化するためには、疾病と密接に関係するモデル行動の解析が重要となる。
【0003】
このようなモデル行動には、四股を用いた秒間十数回といった繰返し運動を伴う擦過行動やグルーミングなどの高速な行動が含まれる。高速な行動の多くは人間の肉眼や標準のNTSC(National Television System Committee)カメラ(30fps)では正確かつ客観的な観測が困難になる。
【0004】
一方で、画像に基づく人間の歩様解析の研究が数多く行われているが、その多くは高々30fpsのビデオ画像を用いて数Hzの周期的歩様を解析している。これに対し、痒みを示すモデル行動として広く知られる、後肢により頭部を繰返し引っ掻くマウスの擦過運動など、四肢の高速な運動を伴う実験動物のモデル行動を正確かつ客観的に定量化するためには、高フレームレート(HFR)のビデオ解析が有効となる。
【0005】
ビデオ解析における空間解像度の優位性から、実験動物の部位ベースドな画像特徴に基づく行動認識アルゴリズムが提案され、部位ラベリング法、マウス輪郭の不変特徴量、ラット行動解析における機械学習などが報告されている。これらの多くは標準的なビデオ画像(NTSC 30fps)を用いており、十数Hzといった四肢の繰返し運動を正確に捉えるためには十分ではない。これに対し、本発明者らは、HFRビデオ解析に基づく擦過行動定量化アルゴリズムを提案し、240fps実時間画像解析システムを開発した(例えば、非特許文献1、2参照)。
【先行技術文献】
【非特許文献】
【0006】
【非特許文献1】I.Ishii et al,"Automatic Scratching Pattern Detection for Laboratory Mice using High-Speed Video Images. "IEEE Trans, Automat. Sci. Eng., 5(1)176-182, 2008.
【非特許文献2】Y.Nie et al,"Real-time Scratching Behavior Quantification System for Laboratory Mice Using High-speed Vision," J. Real-Time Im.Process., 4(2) 181-190, 2009.
【発明の概要】
【発明が解決しようとする課題】
【0007】
上記非特許文献1、2に開示された研究では、全画像領域に対するフレーム間差分特徴計算により十数Hzの周期的な輝度変化を擦過運動として検出している。このため、グルーミングなどの類似した高速な動きを伴うモデル行動が多発する場合、擦過運動と誤検出されやすくなる。
【0008】
また、上記研究では、実験動物の特定の部位の動きまで検出するのは困難である。
【0009】
本発明は、上記実情に鑑みてなされたものであり、実験動物の各部位の行動をより詳細に定量化することができる行動認識装置、行動認識方法及びプログラムを提供することを目的とする。
【課題を解決するための手段】
【0010】
上記目的を達成するため、本発明の第1の観点に係る行動認識装置は、
尾部及び頭部を有する実験動物の撮像画像に基づいて、前記実験動物の重心位置を基準として極座標変換された前記実験動物の輪郭情報を逐次取得する輪郭情報取得部と、
前記輪郭情報取得部により逐次取得された前記輪郭情報を、部位単位で分割し、分割された部位毎に前記輪郭情報の変動に関する情報を算出する変動情報算出部と、
前記変動情報算出部によって算出された前記各部位の前記輪郭情報の変動に関する情報に基づいて、前記実験動物の行動を判別する行動判別部と、
を備える。
【0011】
この場合、前記変動情報算出部は、
前記輪郭情報に基づいて、前記実験動物の尾部の向き及び頭部の向きを検出し、
前記検出された尾部の向き及び頭部の向きを基準として、極座標系を再定義し、
再定義された極座標系の下で、前記輪郭情報を、頭部領域と、左胴体領域と、右胴体領域とに分割する、
こととしてもよい。
【0012】
また、前記輪郭情報の変動に関する情報は、
今回取得した撮像画像から得られる前記輪郭情報と、前回取得した撮像画像から得られる前記輪郭情報との差分である前記各部位のフレーム間特徴差分を含む、
こととしてもよい。
【0013】
また、前記行動判別部は、
前記フレーム間特徴差分が所定の閾値以上であるか否かによりレベルが変化するパルス信号が、所定の時間間隔以内で連続して所定時間以上発生している場合に、
前記各部位が運動していると判別する、
こととしてもよい。
【0014】
また、前記変動情報算出部は、
前記撮像画像における前記実験動物の重心の移動速度に関する第1の情報と、
前記撮像画像における前記実験動物の面積に関する第2の情報と、
前記撮像画像における前記実験動物の全体の動きに関する第3の情報と、
をさらに算出し、
前記行動判別部は、
前記第1の情報、前記第2の情報及び前記第3の情報を考慮して、前記実験動物の行動を判別する、
こととしてもよい。
【0015】
本発明の第2の観点に係る行動認識方法は、
尾部及び頭部を有する実験動物の撮像画像に基づいて、前記実験動物の重心位置を基準として極座標変換された前記実験動物の輪郭情報を逐次取得する輪郭情報取得工程と、
前記輪郭情報取得工程において逐次取得された前記輪郭情報を、部位単位で分割し、分割された部位毎に前記輪郭情報の変動に関する情報を算出する変動情報算出工程と、
前記変動情報算出工程において算出された前記各部位の前記輪郭情報の変動に関する情報に基づいて、前記実験動物の行動を判別する行動判別工程と、
を含む。
【0016】
本発明の第3の観点に係るプログラムは、
コンピュータを、
尾部及び頭部を有する実験動物の撮像画像に基づいて、前記実験動物の重心位置を基準として極座標変換された前記実験動物の輪郭情報を逐次取得する輪郭情報取得部、
前記輪郭情報取得部により逐次取得された前記輪郭情報を、部位単位で分割し、分割された部位毎に前記輪郭情報の変動に関する情報を算出する変動情報算出部、
前記変動情報算出部によって算出された前記各部位の前記輪郭情報の変動に関する情報に基づいて、前記実験動物の行動を判別する行動判別部、
として機能させる。
【発明の効果】
【0017】
本発明によれば、実験動物の撮像画像から極座標変換された実験動物の各部位の輪郭情報の変動に関する情報を得ることができるので、実験動物の各部位の行動をより詳細に定量化することができる。
【図面の簡単な説明】
【0018】
【図1】本発明の実施形態に係る行動認識装置の構成を示す斜視図である。
【図2】図1の画像処理部の構成を示すブロック図である。
【図3】モデル行動の類型を表すルックアップテーブルを示す図である。
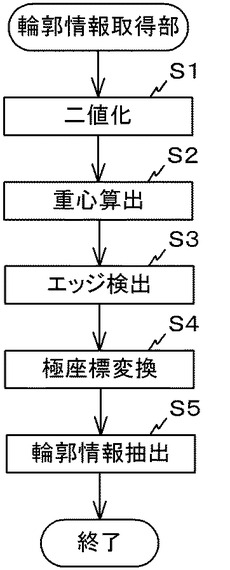
【図4】図2の輪郭情報取得部の処理を示すフローチャートである。
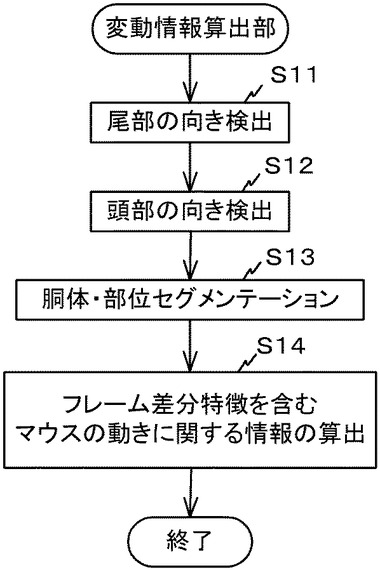
【図5】図2の変動情報算出部の処理を示すフローチャートである。
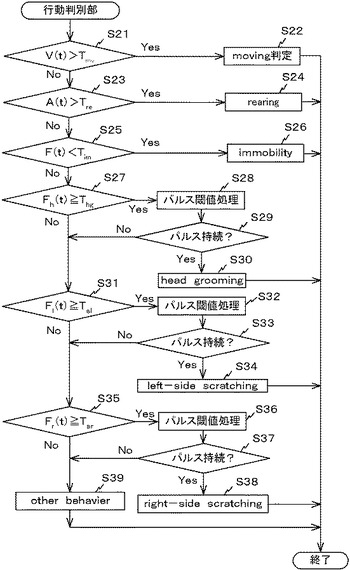
【図6】図2の行動判別部の処理を示すフローチャートである。
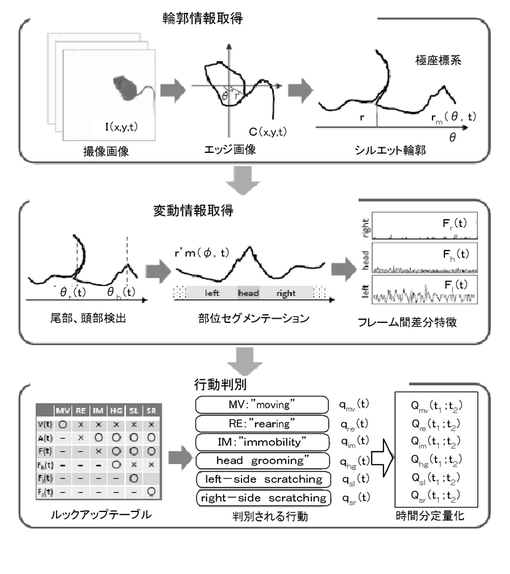
【図7】図1の行動認識装置で行われる処理を模式的に示す図である。
【発明を実施するための形態】
【0019】
この発明の実施の形態について、図面を参照して詳細に説明する。
【0020】
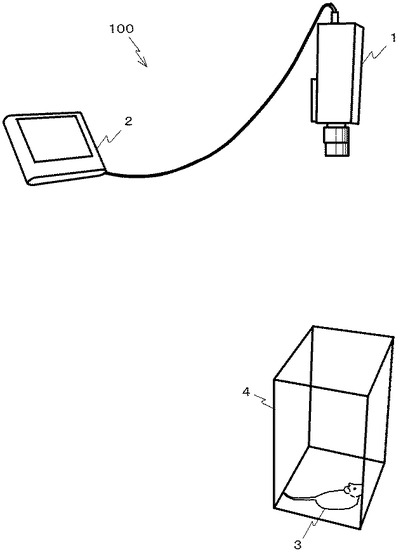
まず、行動認識装置100の構成について図1を参照して詳細に説明する。図1に示すように、行動認識装置100は、撮像部1と、画像処理部2とを備える。行動認識装置100は、尾部及び頭部を有するマウス3の四肢の高速な繰返し運動を含む複数の行動を認識する。マウス3は、例えばICR(癌研究学会)マウスである。ICRマウスは、動物実験に広く用いられているSwissマウスである。マウス3は、透明アクリル製のケージ4に入れられている。
【0021】
撮像部1は、例えば、240fps程度の高フレームレート(HFR)を実現するカメラである。撮像部1は、ケージ4の底面がその撮像視野に収まるように(すなわちマウス3が撮像視野内に収まるように)配置されており、ケージ4内のマウス3を上方から撮像する。撮像部1は、その撮像画像(フレーム画像)を画像処理部2に出力する。この撮像画像は、例えば320×400画素の8ビット濃淡画像である。ケージ4の下には、近赤外平板LED照明(波長950nm)が設置されている。これにより、撮像部1により得られる撮像画像は、マウス3のシルエット画像となる。
【0022】
画像処理部2は、撮像部1から出力されたマウス3の撮像画像を処理するコンピュータである。画像処理部2は、図示しないCPU及びメモリを備えており、メモリに格納されたプログラムを、CPUが実行することにより、図2の各ブロックの機能が実現される。図2に示すように、画像処理部2は、輪郭情報取得部10と、変動情報算出部11と、行動判別部12とを備える。
【0023】
輪郭情報取得部10は、撮像部1で撮像されるマウス3の撮像画像に基づいて、その撮像画像におけるマウス3の重心位置を基準として極座標変換されたマウス3の輪郭情報を逐次取得する。
【0024】
変動情報算出部11は、輪郭情報取得部10により逐次取得されたマウス3の輪郭情報を部位単位で分割し、分割された部位毎にマウス3の輪郭情報の変動に関する情報を算出する。本実施形態では、輪郭情報は、頭部、尾部、右胴体部、左胴体部に分割されるものとする。マウス3の輪郭情報の変動に関する情報には、例えば、今回取得した撮像画像から得られる輪郭情報と、前回取得した撮像画像から得られる輪郭情報との差分であるフレーム間差分特徴がある。
【0025】
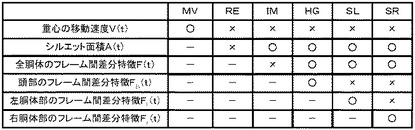
行動判別部12は、変動情報算出部11によって算出された各部位の輪郭情報の変動に関する情報に基づいて、マウス3の行動を判別する。この行動判別は、図3に示すマウス3のモデル行動の類型を表すルックアップテーブルに基づいて行われる。図3のテーブルには、マウス3が取り得る行動として6つのモデル行動が示されている。
【0026】
このルックアップテーブルにおいて、MVは、”moving”であり、歩く、又は走る状態を示す。REは、”rearing”であり、後肢を下に座る、あるいは立つ状態を示している。IMは、”immobility”であり、一定時間運動がない状態を示している。HGは、”head grooming”であり、前肢で頭部を毛繕いする状態である。SLは、”left−side scratching”であり、左後肢で頭部を繰り返し引っ掻く状態である。SRは、”right−side scratching”であり、右後肢で頭部を繰り返し引っ掻く状態である。
【0027】
上記6つの行動と、マウス3の撮像画像から得られる情報との間には、相関関係が見られる。テーブルにおいて、”○”、”×”、”−”は、この相関関係について、それぞれ”large”、”small”、”not−concerned”を意味する。
【0028】
例えば、撮像画像におけるマウス3の重心の移動速度V(t)がかなり大きければ、マウス3の状態は、”moving”(○)であると考えられ、”rearing”、”immobility”、”head grooming”、”left−side scratching”、”right−side scratching”ではない(×)と考えられる。
【0029】
また、撮像画像におけるマウス3のシルエット面積A(t)がかなり小さければ、マウス3の状態は、”rearing”(×)であると考えられ、”immobility”、”head grooming”、”left−side scratching”、”right−side scratching”ではない(○)と考えられる。
【0030】
また、撮像画像から得られる全胴体のフレーム間差分特徴F(t)が小さければ、マウス3の状態は、”immobility”(×)であると考えられ、”head grooming”、”left−side scratching”、”right−side scratching”ではない(○)と考えられる。
【0031】
また、撮像画像から得られる頭部領域のフレーム間差分特徴Fh(t)が大きければ、マウス3の状態は、”head grooming”(○)であると考えられ、”left−side scratching”、”right−side scratching”ではない(×)と考えられる。
【0032】
また、撮像画像から得られる左胴体部のフレーム間差分特徴Fl(t)が大きければ、マウス3の状態は、”left−side scratching”(○)であると考えられ、”right−side scratching”ではない(×)と考えられる。
【0033】
また、撮像画像から得られる右胴体部のフレーム間差分特徴Fr(t)が大きければ、マウス3の状態は、”right−side scratching”(○)であると考えられる。
【0034】
変動情報算出部11は、上述したマウス3の重心の移動速度V(t)、マウス3のシルエット面積A(t)、全胴体のフレーム間差分特徴F(t)、頭部領域のフレーム間差分特徴Fh(t)、左胴体部のフレーム間差分特徴Fl(t)、右胴体部のフレーム間差分特徴Fr(t)を算出する。行動判別部12は、算出されたこれらの情報を用いて、マウス3の行動を判別する。
【0035】
次に、本実施形態に係る行動認識装置100の動作について図4乃至図6のフローチャートを中心にして説明する。図4には、輪郭情報取得部10の処理が示され、図5には、変動情報算出部11の処理が示され、図6には、行動判別部12の処理が示されている。これらの処理は、撮像部1からマウス3の撮像画像が入力される度に実行される。
【0036】
図4に示すように、まず、輪郭情報取得部10は、入力されたマウス3の撮像画像の二値化を行う(ステップS1)。より具体的には、例えば図7に示すように、マウス3のシルエット画像を取得するために、輪郭情報取得部10は、時刻tに入力された撮像画像I(x,y,t)を閾値Tb(例えば100)により二値化し、次式で示される二値化画像を取得する。
【数1】

【0037】
続いて、輪郭情報取得部10は、マウス3の位置を特定するために、マウス3のシルエット画像の重心(cx(t),cy(t))を、以下のモーメント特徴M0(t)、Mx(t)、My(t)を用いて算出する(ステップS2)。
【数2】
D(x,y,t)は、マウス3の尾や四肢を無視したrb×rb画素カーネルによるB(x,y,t)のオープニング画像として算出する。
【0038】
続いて、輪郭情報取得部10は、例えば次式に示すCannyエッジ検出器を用いてマウス3のエッジ画像を求めることにより、エッジを検出する(ステップS3)。図7には、I(x,y,t)から求められるエッジ画像C(x,y,t)の一例が示されている。
【数3】
【0039】
続いて、輪郭情報取得部10は、エッジ画像C(x,y,t)の極座標変換を行う(ステップS4)。ここでは、エッジ画像C(x,y,t)の全ての画素について、重心(cx(t),cy(t))からの距離及び角度を算出し、極座標系(r,θ)を用いて、C(x,y,t)を、P(r,θ,t)へと極座標変換する。
【数4】
ここで、x’=x−cx(t)、y’=y−cy(t)は、マウス3の重心(cx(t),cy(t))からの相対座標値を指し、δ(x)は次のように与えられる。
【数5】
【0040】
続いて、輪郭情報取得部10は、マウス3のシルエットの輪郭情報を抽出する(ステップS5)。ここでは、輪郭情報取得部10は、θの方向にあるP(r,θ,t)の全画素について、最小値rm(θ,t)を算出し、内側境界を極座標系(r,θ)でのシルエット輪郭として抽出する。図7には、このシルエット輪郭rm(θ,t)の一例が示されている。
【数6】
【0041】
次に、変動情報算出部11の処理について説明する。図5に示すように、変動情報算出部11は、シルエット輪郭rm(θ,t)に基づいて、尾部の向きθt(t)を検出する(ステップS11)。尾部の向きθt(t)周辺では、輪郭は大きくカーブし、特定方向に鋭い分布を持つため、尾部の向きθt(t)は、次のように決まる。
【数7】
ここで、h(θ,t)は、θ〜θ+dθの方向において、P(r,θ,t)=1となる画素数を指す。
【0042】
続いて、変動情報算出部11は、シルエット輪郭rm(θ,t)に基づいて、頭部の向きθh(t)を検出する(ステップS12)。頭部の向きθh(t)は、尾部を除いて、重心から一番離れている輪郭上の点の方向として決定される。
【数8】
Θaは、例えばπ/3とすることができる。
【0043】
続いて、変動情報算出部11は、胴体・部位セグメンテーションを行う(ステップS13)。まず、変動情報算出部11は、マウス3の胴体部の屈曲や姿勢の影響を抑えるために、角度座標θについて、検出された尾部の向きθt(t)及び頭部の向きθh(t)を用いて、次のような角度座標Φを再定義する。
【数9】
これにより、rm(θ,t)は、シフト及び姿勢不変なシルエット輪郭情報r’m(Φ,t)に変換され、以下に示す、尾部領域R’t、頭部領域R’h、左胴体領域R’l、右胴体領域R’rにセグメントされる。
【数10】
ここで、尾部領域R’t、頭部領域R’hの中心方向及び範囲は、それぞれ(0,Φt)、(0,Φl)に設定されている。
【0044】
続いて、変動情報算出部11は、部位毎のフレーム間差分特徴を含むマウス3の動きに関する情報を算出する(ステップS14)。ここでは、フレーム間差分特徴Ft(t)、Fr(t)、Fh(t)、Fl(t)が、各部位R’t、R’r、R’h、R’lの運動特徴として、次式を用いて算出される。
【数11】
ここで、dtは、フレーム差分計算の時間間隔である。dtは、例えば、42ms程度とすることができる。
【0045】
さらに、変動情報算出部11は、次式を用いて、重心の移動速度V(t)を算出する。
【数12】
さらに、変動情報算出部11は、次式を用いて、マウス3のシルエット面積A(t)を、次式を用いて求める。
【数13】
さらに、変動情報算出部11は、全胴体のフレーム間差分特徴F(t)を、次式を用いて算出する。
【数14】
【0046】
次に、行動判別部12の処理について説明する。この処理は、上述のように、図3のルックアップテーブルに基づいて定められたものである。
【0047】
図6に示すように、まず、行動判別部12は、重心の移動速度V(t)が閾値Tmvより大きいか否かを判定する(ステップS21)。閾値Tmvは、例えば100画素/s程度とすることができる。重心の移動速度V(t)が閾値Tmvより大きい場合(ステップS21;Yes)、”moving”と判定し、変数qmv(t)に1を設定する(ステップS22)。すなわち、変数qmv(t)は、次式のようになる。
【数15】
この後、行動判別部12は、処理を終了する。
【0048】
一方、重心の移動速度V(t)が閾値Tmv以下の場合(ステップS21;No)、行動判別部12は、シルエット面積A(t)が閾値Treより大きいか否かを判定する(ステップS23)。閾値Treは、例えば、7.4×105画素とすることができる。
【0049】
シルエット面積A(t)が閾値Treより大きい場合(ステップS23;Yes)、行動判別部12は、”rearing”と判定し、変数qre(t)に1を設定する(ステップS24)。すなわち、変数qre(t)は、次式のようになる。
【数16】
この後、行動判別部12は、処理を終了する。
【0050】
一方、シルエット面積A(t)が、閾値Tre以下の場合(ステップS23;No)、行動判別部12は、全胴体のフレーム間差分特徴F(t)が、閾値Timより小さいか否かを判定する(ステップS25)。閾値Timは、例えば5.3×103画素程度とすることができる。
【0051】
全胴体のフレーム間差分特徴F(t)が、閾値Timより小さければ(ステップS25;Yes)、”immmobility”と判定し、変数qim(t)に1を設定する(ステップS26)。すなわち、変数qim(t)は、次式のようになる。
【数17】
この後、行動判別部12は、処理を終了する。
【0052】
一方、全胴体のフレーム間差分特徴F(t)が、閾値Tim以上の場合(ステップS25;No)、行動判別部12は、頭部のフレーム間差分特徴Fh(t)が閾値Thg以上であるか否かを判定する(ステップS27)。例えば、閾値Thgを、100画素とすることができる。
【0053】
頭部のフレーム間差分特徴Fh(t)が閾値Thg以上である場合(ステップS27;Yes)、行動判別部12は、パルス閾値処理を行う(ステップS28)。パルス閾値処理において、まず、行動判別部12は、運動の有無を示すパルスphg(t)に1を設定する。これにより、パルスphg(t)は、次式のようになる。
【数18】
【0054】
続いて、行動判別部12は、次式に従って、これまでに蓄積されたパルスphg(t)から、短時間パルス信号shg(t)のみを抽出し、パルス時間幅の長いパルスを排除する。
【数19】
ここで、d(t)は、時刻tを含むshg=1の持続時間を示し、τ0は長時間パルス除去のための閾値である。
【0055】
続いて、行動判別部12は、パルス信号shg(t)において短時間間隔で短時間パルスが連続する場合、次式のようにして単一パルスs’hg(t)として補償する。
【数20】
【0056】
続いて、行動判別部12は、s’hg(t)の持続時間d”(t)が閾値τ2より大きい否か、すなわちパルスが持続しているか否かを判定する(ステップS29)。閾値τ2は、例えば167msとすることができる。
【0057】
s’hg(t)の持続時間d”(t)が閾値τ2より大きい場合(ステップS29;Yes)、”head grooming”として判定し、変数qhg(t)に1を設定する(ステップS30)。すなわち、変数qhg(t)は、次式のようになる。
【数21】
この後、行動判別部12は、処理を終了する。
【0058】
一方、頭部のフレーム間差分特徴Fh(t)が閾値Thg以上でない場合(ステップS27;No)、行動判別部12は、左胴体部フレーム間差分特徴Fl(t)が、閾値Tslより小さいか否かを判定する(ステップS31)。閾値Tslは、例えば250画素程度とすることができる。
【0059】
左胴体部のフレーム間差分特徴Fl(t)が閾値Tsl以上である場合(ステップS31;Yes)、行動判別部12は、パルス閾値処理を行う(ステップS32)。このパルス閾値処理は、上記ステップS28と同様にして行われる。これにより、左胴体部の繰り返し運動の持続時間d”(t)が得られる。ここで、τ0、τ1については、それぞれ83ms、167msとすることができる。
【0060】
続いて、行動判別部12は、持続時間d”(t)が、閾値τ2より大きいか否か、すなわちパルスが持続しているか否かを判定する(ステップS33)。閾値τ2は、例えば208msとすることができる。
【0061】
持続時間d”(t)が閾値τ2より大きい場合(ステップS33;Yes)、”left-side scratching”として判定し、変数qsl(t)に1を設定する(ステップS34)。すなわち、変数qsl(t)は、次式のようになる。
【数22】
この後、行動判別部12は、処理を終了する。
【0062】
一方、左胴体部のフレーム間差分特徴Fl(t)が閾値Tsl以上でない場合(ステップS31;No)、行動判別部12は、右胴体部フレーム間差分特徴Fr(t)が、閾値Tsrより小さいか否かを判定する(ステップS35)。閾値Tsrは、例えば250画素程度とすることができる。
【0063】
右胴体部のフレーム間差分特徴Fr(t)が閾値Tsr以上である場合(ステップS35;Yes)、行動判別部12は、パルス閾値処理を行う(ステップS36)。このパルス閾値処理は、上記ステップS28と同様にして行われる。これにより、右胴体部の繰り返し運動の持続時間d”(t)が得られる。ここで、τ0、τ1については、それぞれ83ms、167msとすることができる。
【0064】
続いて、行動判別部12は、持続時間d”(t)が、閾値τ2より大きいか否か、すなわちパルスが持続しているか否かを判定する(ステップS37)。閾値τ2は、例えば208msとすることができる。
【0065】
持続時間d”(t)が閾値τ2より大きい場合(ステップS37;Yes)、”right-side scratching”として判定し、変数qsr(t)に1を設定する(ステップS38)。すなわち、変数qsr(t)は、次式のようになる。
【数23】
この後、行動判別部12は、処理を終了する。
【0066】
右胴体部のフレーム間差分特徴Fr(t)が閾値Tsr以上でない場合(ステップS35;No)、行動判別部12は、分類できない他の行動”other behavier”を設定し(ステップS39)、処理を終了する。
【0067】
なお、時刻t=t1〜t2において判別された行動の持続時間Qi(t1:t2)(i=mv,re,im,hg,sl,sr)は、qi(t)=1である時間を積分することで次式を用いて算出される。
【数24】
これにより、ある時間でのマウス3の行動が明らかになる。
【0068】
以上詳細に説明したように、本実施形態によれば、マウス3の撮像画像から極座標変換されたマウス3の各部位の輪郭情報の変動に関する情報を得ることができるので、マウス3の行動をより詳細に定量化することができる。
【0069】
また、本実施形態によれば、マウス3の重心を中心として極座標変換された輪郭情報に基づいてマウス3の動きを検出するので、撮像視野内のマウス3の位置に関らず、マウス3の行動を正確に定量化することができる。さらに、極座標は、マウス3の尾部の向き及び頭部の向きにより再定義されるので、マウス3の胴体部の屈曲や姿勢に左右されずに、マウス3の行動を正確に定量化することができる。
【0070】
また、本実施形態によれば、各部位の動きの検出に先立って、マウス3の重心移動や、マウス3の姿勢の変化などを検出するので、マウス3の移動等に左右されずに、各部位の行動の検出が可能となる。
【0071】
本実施形態に係る行動認識装置を用いれば、新薬開発、毒性実験など様々な医用用途において、疾病と密接に関係する各部位のモデル行動(例えば左肢による擦過運動)の解析により、マウス3の疾病の程度をin vivoレベルで定量化することができる。
【0072】
なお、本発明では、マウス3を検出対象としたが、ラット、モルモットや他の実験動物(実験小動物)を検出対象としてもよい。
【0073】
なお、上記実施の形態において、実行されるプログラムは、フレキシブルディスク、CD−ROM(Compact Disk Read-Only Memory)、DVD(Digital Versatile Disk)、MO(Magneto-Optical Disk)等のコンピュータ読み取り可能な記録媒体に格納して配布し、そのプログラムをインストールすることにより、上述の処理を実行するシステムを構成することとしてもよい。
【0074】
また、プログラムをインターネット等の通信ネットワーク上の所定のサーバ装置が有するディスク装置等に格納しておき、例えば、搬送波に重畳させて、ダウンロード等するようにしてもよい。
【0075】
また、上述の機能を、OS(Operating System)が分担して実現する場合又はOSとアプリケーションとの協働により実現する場合等には、OS以外の部分のみを媒体に格納して配布してもよく、また、ダウンロード等してもよい。
【0076】
本発明は、本発明の広義の精神と範囲を逸脱することなく、様々な実施形態及び変形が可能とされるものである。また、上述した実施形態は、本発明を説明するためのものであり、本発明の範囲を限定するものではない。すなわち、本発明の範囲、実施形態ではなく、特許請求の範囲によって示される。そして、特許請求の範囲内及びそれと同等の発明の意義の範囲内で施される様々な変形が、本発明の範囲内とみなされる。
【産業上の利用可能性】
【0077】
本発明は、尾部及び頭部を有する実験動物の行動の分析に好適である。より具体的には、本発明によれば、実験動物に特化した形で、四肢の高速な繰り返し動作を含む擦過運動やグルーミングなどの複数の行動を同時に自動判別することができる。
【符号の説明】
【0078】
1 撮像部
2 画像処理部
3 マウス
4 ケージ
10 輪郭情報取得部
11 変動情報算出部
12 行動判別部
100 行動認識装置
【技術分野】
【0001】
本発明は、実験動物の行動を自動的に認識する行動認識装置、行動認識方法及びプログラムに関する。
【背景技術】
【0002】
マウスなどの実験動物は、新薬開発、毒性試験など様々な医用用途で用いられている。動物の疾病の程度をin vivoレベルで定量化するためには、疾病と密接に関係するモデル行動の解析が重要となる。
【0003】
このようなモデル行動には、四股を用いた秒間十数回といった繰返し運動を伴う擦過行動やグルーミングなどの高速な行動が含まれる。高速な行動の多くは人間の肉眼や標準のNTSC(National Television System Committee)カメラ(30fps)では正確かつ客観的な観測が困難になる。
【0004】
一方で、画像に基づく人間の歩様解析の研究が数多く行われているが、その多くは高々30fpsのビデオ画像を用いて数Hzの周期的歩様を解析している。これに対し、痒みを示すモデル行動として広く知られる、後肢により頭部を繰返し引っ掻くマウスの擦過運動など、四肢の高速な運動を伴う実験動物のモデル行動を正確かつ客観的に定量化するためには、高フレームレート(HFR)のビデオ解析が有効となる。
【0005】
ビデオ解析における空間解像度の優位性から、実験動物の部位ベースドな画像特徴に基づく行動認識アルゴリズムが提案され、部位ラベリング法、マウス輪郭の不変特徴量、ラット行動解析における機械学習などが報告されている。これらの多くは標準的なビデオ画像(NTSC 30fps)を用いており、十数Hzといった四肢の繰返し運動を正確に捉えるためには十分ではない。これに対し、本発明者らは、HFRビデオ解析に基づく擦過行動定量化アルゴリズムを提案し、240fps実時間画像解析システムを開発した(例えば、非特許文献1、2参照)。
【先行技術文献】
【非特許文献】
【0006】
【非特許文献1】I.Ishii et al,"Automatic Scratching Pattern Detection for Laboratory Mice using High-Speed Video Images. "IEEE Trans, Automat. Sci. Eng., 5(1)176-182, 2008.
【非特許文献2】Y.Nie et al,"Real-time Scratching Behavior Quantification System for Laboratory Mice Using High-speed Vision," J. Real-Time Im.Process., 4(2) 181-190, 2009.
【発明の概要】
【発明が解決しようとする課題】
【0007】
上記非特許文献1、2に開示された研究では、全画像領域に対するフレーム間差分特徴計算により十数Hzの周期的な輝度変化を擦過運動として検出している。このため、グルーミングなどの類似した高速な動きを伴うモデル行動が多発する場合、擦過運動と誤検出されやすくなる。
【0008】
また、上記研究では、実験動物の特定の部位の動きまで検出するのは困難である。
【0009】
本発明は、上記実情に鑑みてなされたものであり、実験動物の各部位の行動をより詳細に定量化することができる行動認識装置、行動認識方法及びプログラムを提供することを目的とする。
【課題を解決するための手段】
【0010】
上記目的を達成するため、本発明の第1の観点に係る行動認識装置は、
尾部及び頭部を有する実験動物の撮像画像に基づいて、前記実験動物の重心位置を基準として極座標変換された前記実験動物の輪郭情報を逐次取得する輪郭情報取得部と、
前記輪郭情報取得部により逐次取得された前記輪郭情報を、部位単位で分割し、分割された部位毎に前記輪郭情報の変動に関する情報を算出する変動情報算出部と、
前記変動情報算出部によって算出された前記各部位の前記輪郭情報の変動に関する情報に基づいて、前記実験動物の行動を判別する行動判別部と、
を備える。
【0011】
この場合、前記変動情報算出部は、
前記輪郭情報に基づいて、前記実験動物の尾部の向き及び頭部の向きを検出し、
前記検出された尾部の向き及び頭部の向きを基準として、極座標系を再定義し、
再定義された極座標系の下で、前記輪郭情報を、頭部領域と、左胴体領域と、右胴体領域とに分割する、
こととしてもよい。
【0012】
また、前記輪郭情報の変動に関する情報は、
今回取得した撮像画像から得られる前記輪郭情報と、前回取得した撮像画像から得られる前記輪郭情報との差分である前記各部位のフレーム間特徴差分を含む、
こととしてもよい。
【0013】
また、前記行動判別部は、
前記フレーム間特徴差分が所定の閾値以上であるか否かによりレベルが変化するパルス信号が、所定の時間間隔以内で連続して所定時間以上発生している場合に、
前記各部位が運動していると判別する、
こととしてもよい。
【0014】
また、前記変動情報算出部は、
前記撮像画像における前記実験動物の重心の移動速度に関する第1の情報と、
前記撮像画像における前記実験動物の面積に関する第2の情報と、
前記撮像画像における前記実験動物の全体の動きに関する第3の情報と、
をさらに算出し、
前記行動判別部は、
前記第1の情報、前記第2の情報及び前記第3の情報を考慮して、前記実験動物の行動を判別する、
こととしてもよい。
【0015】
本発明の第2の観点に係る行動認識方法は、
尾部及び頭部を有する実験動物の撮像画像に基づいて、前記実験動物の重心位置を基準として極座標変換された前記実験動物の輪郭情報を逐次取得する輪郭情報取得工程と、
前記輪郭情報取得工程において逐次取得された前記輪郭情報を、部位単位で分割し、分割された部位毎に前記輪郭情報の変動に関する情報を算出する変動情報算出工程と、
前記変動情報算出工程において算出された前記各部位の前記輪郭情報の変動に関する情報に基づいて、前記実験動物の行動を判別する行動判別工程と、
を含む。
【0016】
本発明の第3の観点に係るプログラムは、
コンピュータを、
尾部及び頭部を有する実験動物の撮像画像に基づいて、前記実験動物の重心位置を基準として極座標変換された前記実験動物の輪郭情報を逐次取得する輪郭情報取得部、
前記輪郭情報取得部により逐次取得された前記輪郭情報を、部位単位で分割し、分割された部位毎に前記輪郭情報の変動に関する情報を算出する変動情報算出部、
前記変動情報算出部によって算出された前記各部位の前記輪郭情報の変動に関する情報に基づいて、前記実験動物の行動を判別する行動判別部、
として機能させる。
【発明の効果】
【0017】
本発明によれば、実験動物の撮像画像から極座標変換された実験動物の各部位の輪郭情報の変動に関する情報を得ることができるので、実験動物の各部位の行動をより詳細に定量化することができる。
【図面の簡単な説明】
【0018】
【図1】本発明の実施形態に係る行動認識装置の構成を示す斜視図である。
【図2】図1の画像処理部の構成を示すブロック図である。
【図3】モデル行動の類型を表すルックアップテーブルを示す図である。
【図4】図2の輪郭情報取得部の処理を示すフローチャートである。
【図5】図2の変動情報算出部の処理を示すフローチャートである。
【図6】図2の行動判別部の処理を示すフローチャートである。
【図7】図1の行動認識装置で行われる処理を模式的に示す図である。
【発明を実施するための形態】
【0019】
この発明の実施の形態について、図面を参照して詳細に説明する。
【0020】
まず、行動認識装置100の構成について図1を参照して詳細に説明する。図1に示すように、行動認識装置100は、撮像部1と、画像処理部2とを備える。行動認識装置100は、尾部及び頭部を有するマウス3の四肢の高速な繰返し運動を含む複数の行動を認識する。マウス3は、例えばICR(癌研究学会)マウスである。ICRマウスは、動物実験に広く用いられているSwissマウスである。マウス3は、透明アクリル製のケージ4に入れられている。
【0021】
撮像部1は、例えば、240fps程度の高フレームレート(HFR)を実現するカメラである。撮像部1は、ケージ4の底面がその撮像視野に収まるように(すなわちマウス3が撮像視野内に収まるように)配置されており、ケージ4内のマウス3を上方から撮像する。撮像部1は、その撮像画像(フレーム画像)を画像処理部2に出力する。この撮像画像は、例えば320×400画素の8ビット濃淡画像である。ケージ4の下には、近赤外平板LED照明(波長950nm)が設置されている。これにより、撮像部1により得られる撮像画像は、マウス3のシルエット画像となる。
【0022】
画像処理部2は、撮像部1から出力されたマウス3の撮像画像を処理するコンピュータである。画像処理部2は、図示しないCPU及びメモリを備えており、メモリに格納されたプログラムを、CPUが実行することにより、図2の各ブロックの機能が実現される。図2に示すように、画像処理部2は、輪郭情報取得部10と、変動情報算出部11と、行動判別部12とを備える。
【0023】
輪郭情報取得部10は、撮像部1で撮像されるマウス3の撮像画像に基づいて、その撮像画像におけるマウス3の重心位置を基準として極座標変換されたマウス3の輪郭情報を逐次取得する。
【0024】
変動情報算出部11は、輪郭情報取得部10により逐次取得されたマウス3の輪郭情報を部位単位で分割し、分割された部位毎にマウス3の輪郭情報の変動に関する情報を算出する。本実施形態では、輪郭情報は、頭部、尾部、右胴体部、左胴体部に分割されるものとする。マウス3の輪郭情報の変動に関する情報には、例えば、今回取得した撮像画像から得られる輪郭情報と、前回取得した撮像画像から得られる輪郭情報との差分であるフレーム間差分特徴がある。
【0025】
行動判別部12は、変動情報算出部11によって算出された各部位の輪郭情報の変動に関する情報に基づいて、マウス3の行動を判別する。この行動判別は、図3に示すマウス3のモデル行動の類型を表すルックアップテーブルに基づいて行われる。図3のテーブルには、マウス3が取り得る行動として6つのモデル行動が示されている。
【0026】
このルックアップテーブルにおいて、MVは、”moving”であり、歩く、又は走る状態を示す。REは、”rearing”であり、後肢を下に座る、あるいは立つ状態を示している。IMは、”immobility”であり、一定時間運動がない状態を示している。HGは、”head grooming”であり、前肢で頭部を毛繕いする状態である。SLは、”left−side scratching”であり、左後肢で頭部を繰り返し引っ掻く状態である。SRは、”right−side scratching”であり、右後肢で頭部を繰り返し引っ掻く状態である。
【0027】
上記6つの行動と、マウス3の撮像画像から得られる情報との間には、相関関係が見られる。テーブルにおいて、”○”、”×”、”−”は、この相関関係について、それぞれ”large”、”small”、”not−concerned”を意味する。
【0028】
例えば、撮像画像におけるマウス3の重心の移動速度V(t)がかなり大きければ、マウス3の状態は、”moving”(○)であると考えられ、”rearing”、”immobility”、”head grooming”、”left−side scratching”、”right−side scratching”ではない(×)と考えられる。
【0029】
また、撮像画像におけるマウス3のシルエット面積A(t)がかなり小さければ、マウス3の状態は、”rearing”(×)であると考えられ、”immobility”、”head grooming”、”left−side scratching”、”right−side scratching”ではない(○)と考えられる。
【0030】
また、撮像画像から得られる全胴体のフレーム間差分特徴F(t)が小さければ、マウス3の状態は、”immobility”(×)であると考えられ、”head grooming”、”left−side scratching”、”right−side scratching”ではない(○)と考えられる。
【0031】
また、撮像画像から得られる頭部領域のフレーム間差分特徴Fh(t)が大きければ、マウス3の状態は、”head grooming”(○)であると考えられ、”left−side scratching”、”right−side scratching”ではない(×)と考えられる。
【0032】
また、撮像画像から得られる左胴体部のフレーム間差分特徴Fl(t)が大きければ、マウス3の状態は、”left−side scratching”(○)であると考えられ、”right−side scratching”ではない(×)と考えられる。
【0033】
また、撮像画像から得られる右胴体部のフレーム間差分特徴Fr(t)が大きければ、マウス3の状態は、”right−side scratching”(○)であると考えられる。
【0034】
変動情報算出部11は、上述したマウス3の重心の移動速度V(t)、マウス3のシルエット面積A(t)、全胴体のフレーム間差分特徴F(t)、頭部領域のフレーム間差分特徴Fh(t)、左胴体部のフレーム間差分特徴Fl(t)、右胴体部のフレーム間差分特徴Fr(t)を算出する。行動判別部12は、算出されたこれらの情報を用いて、マウス3の行動を判別する。
【0035】
次に、本実施形態に係る行動認識装置100の動作について図4乃至図6のフローチャートを中心にして説明する。図4には、輪郭情報取得部10の処理が示され、図5には、変動情報算出部11の処理が示され、図6には、行動判別部12の処理が示されている。これらの処理は、撮像部1からマウス3の撮像画像が入力される度に実行される。
【0036】
図4に示すように、まず、輪郭情報取得部10は、入力されたマウス3の撮像画像の二値化を行う(ステップS1)。より具体的には、例えば図7に示すように、マウス3のシルエット画像を取得するために、輪郭情報取得部10は、時刻tに入力された撮像画像I(x,y,t)を閾値Tb(例えば100)により二値化し、次式で示される二値化画像を取得する。
【数1】
【0037】
続いて、輪郭情報取得部10は、マウス3の位置を特定するために、マウス3のシルエット画像の重心(cx(t),cy(t))を、以下のモーメント特徴M0(t)、Mx(t)、My(t)を用いて算出する(ステップS2)。
【数2】
D(x,y,t)は、マウス3の尾や四肢を無視したrb×rb画素カーネルによるB(x,y,t)のオープニング画像として算出する。
【0038】
続いて、輪郭情報取得部10は、例えば次式に示すCannyエッジ検出器を用いてマウス3のエッジ画像を求めることにより、エッジを検出する(ステップS3)。図7には、I(x,y,t)から求められるエッジ画像C(x,y,t)の一例が示されている。
【数3】
【0039】
続いて、輪郭情報取得部10は、エッジ画像C(x,y,t)の極座標変換を行う(ステップS4)。ここでは、エッジ画像C(x,y,t)の全ての画素について、重心(cx(t),cy(t))からの距離及び角度を算出し、極座標系(r,θ)を用いて、C(x,y,t)を、P(r,θ,t)へと極座標変換する。
【数4】
ここで、x’=x−cx(t)、y’=y−cy(t)は、マウス3の重心(cx(t),cy(t))からの相対座標値を指し、δ(x)は次のように与えられる。
【数5】
【0040】
続いて、輪郭情報取得部10は、マウス3のシルエットの輪郭情報を抽出する(ステップS5)。ここでは、輪郭情報取得部10は、θの方向にあるP(r,θ,t)の全画素について、最小値rm(θ,t)を算出し、内側境界を極座標系(r,θ)でのシルエット輪郭として抽出する。図7には、このシルエット輪郭rm(θ,t)の一例が示されている。
【数6】
【0041】
次に、変動情報算出部11の処理について説明する。図5に示すように、変動情報算出部11は、シルエット輪郭rm(θ,t)に基づいて、尾部の向きθt(t)を検出する(ステップS11)。尾部の向きθt(t)周辺では、輪郭は大きくカーブし、特定方向に鋭い分布を持つため、尾部の向きθt(t)は、次のように決まる。
【数7】
ここで、h(θ,t)は、θ〜θ+dθの方向において、P(r,θ,t)=1となる画素数を指す。
【0042】
続いて、変動情報算出部11は、シルエット輪郭rm(θ,t)に基づいて、頭部の向きθh(t)を検出する(ステップS12)。頭部の向きθh(t)は、尾部を除いて、重心から一番離れている輪郭上の点の方向として決定される。
【数8】
Θaは、例えばπ/3とすることができる。
【0043】
続いて、変動情報算出部11は、胴体・部位セグメンテーションを行う(ステップS13)。まず、変動情報算出部11は、マウス3の胴体部の屈曲や姿勢の影響を抑えるために、角度座標θについて、検出された尾部の向きθt(t)及び頭部の向きθh(t)を用いて、次のような角度座標Φを再定義する。
【数9】
これにより、rm(θ,t)は、シフト及び姿勢不変なシルエット輪郭情報r’m(Φ,t)に変換され、以下に示す、尾部領域R’t、頭部領域R’h、左胴体領域R’l、右胴体領域R’rにセグメントされる。
【数10】
ここで、尾部領域R’t、頭部領域R’hの中心方向及び範囲は、それぞれ(0,Φt)、(0,Φl)に設定されている。
【0044】
続いて、変動情報算出部11は、部位毎のフレーム間差分特徴を含むマウス3の動きに関する情報を算出する(ステップS14)。ここでは、フレーム間差分特徴Ft(t)、Fr(t)、Fh(t)、Fl(t)が、各部位R’t、R’r、R’h、R’lの運動特徴として、次式を用いて算出される。
【数11】
ここで、dtは、フレーム差分計算の時間間隔である。dtは、例えば、42ms程度とすることができる。
【0045】
さらに、変動情報算出部11は、次式を用いて、重心の移動速度V(t)を算出する。
【数12】
さらに、変動情報算出部11は、次式を用いて、マウス3のシルエット面積A(t)を、次式を用いて求める。
【数13】
さらに、変動情報算出部11は、全胴体のフレーム間差分特徴F(t)を、次式を用いて算出する。
【数14】
【0046】
次に、行動判別部12の処理について説明する。この処理は、上述のように、図3のルックアップテーブルに基づいて定められたものである。
【0047】
図6に示すように、まず、行動判別部12は、重心の移動速度V(t)が閾値Tmvより大きいか否かを判定する(ステップS21)。閾値Tmvは、例えば100画素/s程度とすることができる。重心の移動速度V(t)が閾値Tmvより大きい場合(ステップS21;Yes)、”moving”と判定し、変数qmv(t)に1を設定する(ステップS22)。すなわち、変数qmv(t)は、次式のようになる。
【数15】
この後、行動判別部12は、処理を終了する。
【0048】
一方、重心の移動速度V(t)が閾値Tmv以下の場合(ステップS21;No)、行動判別部12は、シルエット面積A(t)が閾値Treより大きいか否かを判定する(ステップS23)。閾値Treは、例えば、7.4×105画素とすることができる。
【0049】
シルエット面積A(t)が閾値Treより大きい場合(ステップS23;Yes)、行動判別部12は、”rearing”と判定し、変数qre(t)に1を設定する(ステップS24)。すなわち、変数qre(t)は、次式のようになる。
【数16】
この後、行動判別部12は、処理を終了する。
【0050】
一方、シルエット面積A(t)が、閾値Tre以下の場合(ステップS23;No)、行動判別部12は、全胴体のフレーム間差分特徴F(t)が、閾値Timより小さいか否かを判定する(ステップS25)。閾値Timは、例えば5.3×103画素程度とすることができる。
【0051】
全胴体のフレーム間差分特徴F(t)が、閾値Timより小さければ(ステップS25;Yes)、”immmobility”と判定し、変数qim(t)に1を設定する(ステップS26)。すなわち、変数qim(t)は、次式のようになる。
【数17】
この後、行動判別部12は、処理を終了する。
【0052】
一方、全胴体のフレーム間差分特徴F(t)が、閾値Tim以上の場合(ステップS25;No)、行動判別部12は、頭部のフレーム間差分特徴Fh(t)が閾値Thg以上であるか否かを判定する(ステップS27)。例えば、閾値Thgを、100画素とすることができる。
【0053】
頭部のフレーム間差分特徴Fh(t)が閾値Thg以上である場合(ステップS27;Yes)、行動判別部12は、パルス閾値処理を行う(ステップS28)。パルス閾値処理において、まず、行動判別部12は、運動の有無を示すパルスphg(t)に1を設定する。これにより、パルスphg(t)は、次式のようになる。
【数18】
【0054】
続いて、行動判別部12は、次式に従って、これまでに蓄積されたパルスphg(t)から、短時間パルス信号shg(t)のみを抽出し、パルス時間幅の長いパルスを排除する。
【数19】
ここで、d(t)は、時刻tを含むshg=1の持続時間を示し、τ0は長時間パルス除去のための閾値である。
【0055】
続いて、行動判別部12は、パルス信号shg(t)において短時間間隔で短時間パルスが連続する場合、次式のようにして単一パルスs’hg(t)として補償する。
【数20】
【0056】
続いて、行動判別部12は、s’hg(t)の持続時間d”(t)が閾値τ2より大きい否か、すなわちパルスが持続しているか否かを判定する(ステップS29)。閾値τ2は、例えば167msとすることができる。
【0057】
s’hg(t)の持続時間d”(t)が閾値τ2より大きい場合(ステップS29;Yes)、”head grooming”として判定し、変数qhg(t)に1を設定する(ステップS30)。すなわち、変数qhg(t)は、次式のようになる。
【数21】
この後、行動判別部12は、処理を終了する。
【0058】
一方、頭部のフレーム間差分特徴Fh(t)が閾値Thg以上でない場合(ステップS27;No)、行動判別部12は、左胴体部フレーム間差分特徴Fl(t)が、閾値Tslより小さいか否かを判定する(ステップS31)。閾値Tslは、例えば250画素程度とすることができる。
【0059】
左胴体部のフレーム間差分特徴Fl(t)が閾値Tsl以上である場合(ステップS31;Yes)、行動判別部12は、パルス閾値処理を行う(ステップS32)。このパルス閾値処理は、上記ステップS28と同様にして行われる。これにより、左胴体部の繰り返し運動の持続時間d”(t)が得られる。ここで、τ0、τ1については、それぞれ83ms、167msとすることができる。
【0060】
続いて、行動判別部12は、持続時間d”(t)が、閾値τ2より大きいか否か、すなわちパルスが持続しているか否かを判定する(ステップS33)。閾値τ2は、例えば208msとすることができる。
【0061】
持続時間d”(t)が閾値τ2より大きい場合(ステップS33;Yes)、”left-side scratching”として判定し、変数qsl(t)に1を設定する(ステップS34)。すなわち、変数qsl(t)は、次式のようになる。
【数22】
この後、行動判別部12は、処理を終了する。
【0062】
一方、左胴体部のフレーム間差分特徴Fl(t)が閾値Tsl以上でない場合(ステップS31;No)、行動判別部12は、右胴体部フレーム間差分特徴Fr(t)が、閾値Tsrより小さいか否かを判定する(ステップS35)。閾値Tsrは、例えば250画素程度とすることができる。
【0063】
右胴体部のフレーム間差分特徴Fr(t)が閾値Tsr以上である場合(ステップS35;Yes)、行動判別部12は、パルス閾値処理を行う(ステップS36)。このパルス閾値処理は、上記ステップS28と同様にして行われる。これにより、右胴体部の繰り返し運動の持続時間d”(t)が得られる。ここで、τ0、τ1については、それぞれ83ms、167msとすることができる。
【0064】
続いて、行動判別部12は、持続時間d”(t)が、閾値τ2より大きいか否か、すなわちパルスが持続しているか否かを判定する(ステップS37)。閾値τ2は、例えば208msとすることができる。
【0065】
持続時間d”(t)が閾値τ2より大きい場合(ステップS37;Yes)、”right-side scratching”として判定し、変数qsr(t)に1を設定する(ステップS38)。すなわち、変数qsr(t)は、次式のようになる。
【数23】
この後、行動判別部12は、処理を終了する。
【0066】
右胴体部のフレーム間差分特徴Fr(t)が閾値Tsr以上でない場合(ステップS35;No)、行動判別部12は、分類できない他の行動”other behavier”を設定し(ステップS39)、処理を終了する。
【0067】
なお、時刻t=t1〜t2において判別された行動の持続時間Qi(t1:t2)(i=mv,re,im,hg,sl,sr)は、qi(t)=1である時間を積分することで次式を用いて算出される。
【数24】
これにより、ある時間でのマウス3の行動が明らかになる。
【0068】
以上詳細に説明したように、本実施形態によれば、マウス3の撮像画像から極座標変換されたマウス3の各部位の輪郭情報の変動に関する情報を得ることができるので、マウス3の行動をより詳細に定量化することができる。
【0069】
また、本実施形態によれば、マウス3の重心を中心として極座標変換された輪郭情報に基づいてマウス3の動きを検出するので、撮像視野内のマウス3の位置に関らず、マウス3の行動を正確に定量化することができる。さらに、極座標は、マウス3の尾部の向き及び頭部の向きにより再定義されるので、マウス3の胴体部の屈曲や姿勢に左右されずに、マウス3の行動を正確に定量化することができる。
【0070】
また、本実施形態によれば、各部位の動きの検出に先立って、マウス3の重心移動や、マウス3の姿勢の変化などを検出するので、マウス3の移動等に左右されずに、各部位の行動の検出が可能となる。
【0071】
本実施形態に係る行動認識装置を用いれば、新薬開発、毒性実験など様々な医用用途において、疾病と密接に関係する各部位のモデル行動(例えば左肢による擦過運動)の解析により、マウス3の疾病の程度をin vivoレベルで定量化することができる。
【0072】
なお、本発明では、マウス3を検出対象としたが、ラット、モルモットや他の実験動物(実験小動物)を検出対象としてもよい。
【0073】
なお、上記実施の形態において、実行されるプログラムは、フレキシブルディスク、CD−ROM(Compact Disk Read-Only Memory)、DVD(Digital Versatile Disk)、MO(Magneto-Optical Disk)等のコンピュータ読み取り可能な記録媒体に格納して配布し、そのプログラムをインストールすることにより、上述の処理を実行するシステムを構成することとしてもよい。
【0074】
また、プログラムをインターネット等の通信ネットワーク上の所定のサーバ装置が有するディスク装置等に格納しておき、例えば、搬送波に重畳させて、ダウンロード等するようにしてもよい。
【0075】
また、上述の機能を、OS(Operating System)が分担して実現する場合又はOSとアプリケーションとの協働により実現する場合等には、OS以外の部分のみを媒体に格納して配布してもよく、また、ダウンロード等してもよい。
【0076】
本発明は、本発明の広義の精神と範囲を逸脱することなく、様々な実施形態及び変形が可能とされるものである。また、上述した実施形態は、本発明を説明するためのものであり、本発明の範囲を限定するものではない。すなわち、本発明の範囲、実施形態ではなく、特許請求の範囲によって示される。そして、特許請求の範囲内及びそれと同等の発明の意義の範囲内で施される様々な変形が、本発明の範囲内とみなされる。
【産業上の利用可能性】
【0077】
本発明は、尾部及び頭部を有する実験動物の行動の分析に好適である。より具体的には、本発明によれば、実験動物に特化した形で、四肢の高速な繰り返し動作を含む擦過運動やグルーミングなどの複数の行動を同時に自動判別することができる。
【符号の説明】
【0078】
1 撮像部
2 画像処理部
3 マウス
4 ケージ
10 輪郭情報取得部
11 変動情報算出部
12 行動判別部
100 行動認識装置
【特許請求の範囲】
【請求項1】
尾部及び頭部を有する実験動物の撮像画像に基づいて、前記実験動物の重心位置を基準として極座標変換された前記実験動物の輪郭情報を逐次取得する輪郭情報取得部と、
前記輪郭情報取得部により逐次取得された前記輪郭情報を、部位単位で分割し、分割された部位毎に前記輪郭情報の変動に関する情報を算出する変動情報算出部と、
前記変動情報算出部によって算出された前記各部位の前記輪郭情報の変動に関する情報に基づいて、前記実験動物の行動を判別する行動判別部と、
を備える行動認識装置。
【請求項2】
前記変動情報算出部は、
前記輪郭情報に基づいて、前記実験動物の尾部の向き及び頭部の向きを検出し、
前記検出された尾部の向き及び頭部の向きを基準として、極座標系を再定義し、
再定義された極座標系の下で、前記輪郭情報を、頭部領域と、左胴体領域と、右胴体領域とに分割する、
ことを特徴とする請求項1に記載の行動認識装置。
【請求項3】
前記輪郭情報の変動に関する情報は、
今回取得した撮像画像から得られる前記輪郭情報と、前回取得した撮像画像から得られる前記輪郭情報との差分であるフレーム間特徴差分を含む、
ことを特徴とする請求項1又は2に記載の行動認識装置。
【請求項4】
前記行動判別部は、
前記フレーム間特徴差分が所定の閾値以上であるか否かによりレベルが変化するパルス信号が、所定の時間間隔以内で連続して所定時間以上発生している場合に、
前記各部位が運動していると判別する、
ことを特徴とする請求項3に記載の行動認識装置。
【請求項5】
前記変動情報算出部は、
前記撮像画像における前記実験動物の重心の移動速度に関する第1の情報と、
前記撮像画像における前記実験動物の面積に関する第2の情報と、
前記撮像画像における前記実験動物の全体の動きに関する第3の情報と、
をさらに算出し、
前記行動判別部は、
前記第1の情報、前記第2の情報及び前記第3の情報を考慮して、前記実験動物の行動を判別する、
ことを特徴とする請求項1乃至4のいずれか一項に記載の行動認識装置。
【請求項6】
尾部及び頭部を有する実験動物の撮像画像に基づいて、前記実験動物の重心位置を基準として極座標変換された前記実験動物の輪郭情報を逐次取得する輪郭情報取得工程と、
前記輪郭情報取得工程において逐次取得された前記輪郭情報を、部位単位で分割し、分割された部位毎に前記輪郭情報の変動に関する情報を算出する変動情報算出工程と、
前記変動情報算出工程において算出された前記各部位の前記輪郭情報の変動に関する情報に基づいて、前記実験動物の行動を判別する行動判別工程と、
を含む行動認識方法。
【請求項7】
コンピュータを、
尾部及び頭部を有する実験動物の撮像画像に基づいて、前記実験動物の重心位置を基準として極座標変換された前記実験動物の輪郭情報を逐次取得する輪郭情報取得部、
前記輪郭情報取得部により逐次取得された前記輪郭情報を、部位単位で分割し、分割された部位毎に前記輪郭情報の変動に関する情報を算出する変動情報算出部、
前記変動情報算出部によって算出された前記各部位の前記輪郭情報の変動に関する情報に基づいて、前記実験動物の行動を判別する行動判別部、
として機能させるプログラム。
【請求項1】
尾部及び頭部を有する実験動物の撮像画像に基づいて、前記実験動物の重心位置を基準として極座標変換された前記実験動物の輪郭情報を逐次取得する輪郭情報取得部と、
前記輪郭情報取得部により逐次取得された前記輪郭情報を、部位単位で分割し、分割された部位毎に前記輪郭情報の変動に関する情報を算出する変動情報算出部と、
前記変動情報算出部によって算出された前記各部位の前記輪郭情報の変動に関する情報に基づいて、前記実験動物の行動を判別する行動判別部と、
を備える行動認識装置。
【請求項2】
前記変動情報算出部は、
前記輪郭情報に基づいて、前記実験動物の尾部の向き及び頭部の向きを検出し、
前記検出された尾部の向き及び頭部の向きを基準として、極座標系を再定義し、
再定義された極座標系の下で、前記輪郭情報を、頭部領域と、左胴体領域と、右胴体領域とに分割する、
ことを特徴とする請求項1に記載の行動認識装置。
【請求項3】
前記輪郭情報の変動に関する情報は、
今回取得した撮像画像から得られる前記輪郭情報と、前回取得した撮像画像から得られる前記輪郭情報との差分であるフレーム間特徴差分を含む、
ことを特徴とする請求項1又は2に記載の行動認識装置。
【請求項4】
前記行動判別部は、
前記フレーム間特徴差分が所定の閾値以上であるか否かによりレベルが変化するパルス信号が、所定の時間間隔以内で連続して所定時間以上発生している場合に、
前記各部位が運動していると判別する、
ことを特徴とする請求項3に記載の行動認識装置。
【請求項5】
前記変動情報算出部は、
前記撮像画像における前記実験動物の重心の移動速度に関する第1の情報と、
前記撮像画像における前記実験動物の面積に関する第2の情報と、
前記撮像画像における前記実験動物の全体の動きに関する第3の情報と、
をさらに算出し、
前記行動判別部は、
前記第1の情報、前記第2の情報及び前記第3の情報を考慮して、前記実験動物の行動を判別する、
ことを特徴とする請求項1乃至4のいずれか一項に記載の行動認識装置。
【請求項6】
尾部及び頭部を有する実験動物の撮像画像に基づいて、前記実験動物の重心位置を基準として極座標変換された前記実験動物の輪郭情報を逐次取得する輪郭情報取得工程と、
前記輪郭情報取得工程において逐次取得された前記輪郭情報を、部位単位で分割し、分割された部位毎に前記輪郭情報の変動に関する情報を算出する変動情報算出工程と、
前記変動情報算出工程において算出された前記各部位の前記輪郭情報の変動に関する情報に基づいて、前記実験動物の行動を判別する行動判別工程と、
を含む行動認識方法。
【請求項7】
コンピュータを、
尾部及び頭部を有する実験動物の撮像画像に基づいて、前記実験動物の重心位置を基準として極座標変換された前記実験動物の輪郭情報を逐次取得する輪郭情報取得部、
前記輪郭情報取得部により逐次取得された前記輪郭情報を、部位単位で分割し、分割された部位毎に前記輪郭情報の変動に関する情報を算出する変動情報算出部、
前記変動情報算出部によって算出された前記各部位の前記輪郭情報の変動に関する情報に基づいて、前記実験動物の行動を判別する行動判別部、
として機能させるプログラム。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2012−190280(P2012−190280A)
【公開日】平成24年10月4日(2012.10.4)
【国際特許分類】
【出願番号】特願2011−53488(P2011−53488)
【出願日】平成23年3月10日(2011.3.10)
【出願人】(504136568)国立大学法人広島大学 (924)
【Fターム(参考)】
【公開日】平成24年10月4日(2012.10.4)
【国際特許分類】
【出願日】平成23年3月10日(2011.3.10)
【出願人】(504136568)国立大学法人広島大学 (924)
【Fターム(参考)】
[ Back to top ]