
衛星の天体暦誤差
衛星の天体暦誤差を補償または補正する方法は、様々な地理的位置における較正送信機(42a〜42d)から2機の衛星(34、46)を介して受信される信号レプリカの到達時間差(TDOA)および到達周波数差(FDOA)を測定するステップを含む。TDOAおよびFDOAの測定値に最良適合するTDOAおよびFDOAの推定値を与える天体暦変化を計算するために、位置ベクトルと速度ベクトルからなる初期衛星天体暦が使用される。これは、初期衛星天体暦の誤差を補償または補正するために必要な推定変化を提供する。この方法は、大きい天体暦変化を処理するために反復されてもよい。すなわち、1回の反復で得られる変化は、次の反復において新たな初期天体暦として使用される天体暦を補正するために使用されてもよい。この方法は、1機または2機の衛星の天体暦誤差を補正するために使用されてもよく、そうであれば、さらに多くの較正送信機EphemCal 1〜EphemCal 10が使用されてもよい。

【発明の詳細な説明】
【技術分野】
【0001】
本発明は、衛星の天体暦誤差に関し、特に(限定的ではないが)、天体暦誤差が原因で生じる地理位置情報測定値における誤差の判定および/または補償に関する。
【背景技術】
【0002】
衛星の天体暦または天体暦の設定は、少なくとも6つのパラメータと関連時刻のリストである。6つのパラメータと関連時刻からは、地球軌道周回衛星の宇宙空間における位置および速度を計算することが可能である。これは様々な意味で重要な量であるが、1つの特に重要な使途は、地理位置情報の分野にあり、すなわち、衛星通信チャネルの不正使用または干渉に関与する地上送信機または地上局の特定である。従来の地理位置情報技術が使用される前に衛星の天体暦情報を入手する必要がある。天体暦は、その座標系に依存する形式を有する。周回する物体の運動が地球の原点から宇宙空間の固定点までに関連して記述される場合にケプラー要素が最も一般的に参照される。この種の2つの最も一般的な基準座標系は、地球中心慣性座標系(ECI)および地球中心固定座標系(ECF)である。
【0003】
衛星への不正アクセスは、単なる迷惑から合法的なユーザに対する衛星へのアクセスの完全な拒否に至るまで問題は様々である。衛星を利用したサービスの急増、個人衛星通信の出現、周回軌道衛星によって占められる静止弧の輻輳の増加、およびテレビ放送の妨害電波に起因する干渉の発生は増加している。干渉は、人的ミス(たとえば、正しく整列されていないアンテナ)や装置の障害によって生じる場合が多いが、帯域幅の悪用や合法的なユーザへのサービス拒否といった意図的な企ての表れである場合もある。
【0004】
衛星干渉を撲滅するためには、衛星干渉の原因である地上局送信機を地理的に特定する必要がある。このような地理位置情報は周知であり、現在、衛星の天体暦誤差が重大な(通常、最も主要な)誤差の源である。
【0005】
1982年3月のIEEE Trans.on Aerospace and Electronic Systems,Vol.AES−18,No.2において、P C Chestnutは、未知信号源を特定する基本的な技術を記載しており、この技術は、受信局までの2つの独立した信号経路に沿って中継される信号源からの信号のレプリカの到達時間差(TDOA)および/または到達周波数差(FDOA)の決定を含む。また、TDOAおよびFDOAは、それぞれ、差分時間オフセット(DTO)と差分周波数オフセット(DFO)または差分ドップラーとして先行技術において知られている。2つの受信信号からのDTOおよびDFOの決定は、1981年6月のIEEE Trans.on Acoustics Speech and Signal Processing,Vol.ASSP−29,No.3において、S Stein著の「Algorithms for Ambiguity Function Processing」に記載されている。この技術は、試行時間シフトを有する受信信号と互いに対する周波数オフセットとの相関の計算を含む。この相関を最大化する時間シフトと周波数オフセットとは、衛星に導入されるオフセットの補正を受ける所要のDTOおよびDFOである。米国特許第5,008,679号明細書に開示されているように、DTOおよびDFOから、地球表面の干渉する送信機の位置が決定(地理位置が特定)され得る。この特許は、TDOA(またはDTO)およびFDOA(またはDFO)測定値を使った2機の静止中継衛星の対象送信機の位置を開示している。一定のTDOAまたはFDOAの点の軌跡は、位置線(LOP)と呼ばれる曲線を規定する地球の表面を遮る面である。TDOAおよびFDOAの測定は、決定される対象送信機の位置で交差する2つのLOPを提供する。
【0006】
米国特許第6,018,312号明細書(Haworth)は、位相同期の基準信号を使った誤差補正を有する衛星を介した地理位置情報を開示している。米国特許第5,594,452号明細書(Webberら)には、ブロードバンド法を使った関連技術が開示されている。米国特許第6,618,009号明細書(Griffinら)は、時間依存性DTOおよびDFOを有する地理位置情報に関する。米国特許第6,677,893号明細書(Rideoutら)は、周波数アジル干渉を有する地理位置情報に関する。
【0007】
米国特許第6,018,312号明細書のコヒーレント基準法は、天体暦誤差の影響を緩和するもので、これらの影響は対象−基準間隔が小さくなるにつれて小さくなる。残念ながら、基準送信機が対象送信機に比較的近い場合でも、天体暦誤差は、典型的に、得られた地理位置情報における主要な不確定要素であることに変りはない。
【発明の開示】
【発明が解決しようとする課題】
【0008】
先行技術の地理位置情報の精度は、計算に使用される2機の衛星の天体暦精度に大きく依存する。衛星測距測定およびこれに続く天体暦計算は、通常、地上局が衛星を追跡し得る十分な精度でのみ行なわれる。衛星オペレータが戦略要件を計算し得るさらに詳細な天体暦データが生成されることもあるが、これらの戦略要件は、通常、計算に24時間かかり、当然のことながら、ネットワークユーザに提供されない。正確な地理位置情報に必要な高精度天体暦の収集は稀であり、天体暦誤差は得られる地理位置情報における誤差の主要源であることが多い。
【0009】
本発明の目的は、衛星の天体暦誤差の測定方法および/または衛星の天体暦誤差が原因で生じる地理位置情報測定値の誤差の補償方法を提供することである。
【課題を解決するための手段】
【0010】
本発明は、
a.既知の位置の較正送信手段から種々の衛星を介して受信される信号レプリカに伴う時間差および周波数差の少なくとも一方を決定するステップと、
b.衛星の天体暦要素に対応する推定値を得て、推定値の変化を計算し、対応する測定済みの時間差および/または周波数差とよりよく一致する時間差および周波数差の推定値の少なくとも一方を生じさせるステップと
を備える、衛星の天体暦誤差を補償または補正する方法を提供する。
【0011】
本発明は、衛星の天体暦誤差を有する1機の衛星と2機の衛星のどちらに使用されるかに応じて衛星の天体暦誤差を補償または補正する。本発明は、特に(ただし、限定するものではなく)、衛星通信チャネルを不正使用したり、衛星通信チャネルに干渉を起こしたりする地上送信機の地理位置情報を使用するために、より正確な天体暦データを得られるようにするという長所を備える。
【0012】
ステップa)は、信号レプリカに伴う時間差および周波数差の両方を決定するステップを備えてもよい。較正送信手段は、少なくとも2台の較正送信機、そして好ましくは少なくとも4台の較正送信機を備えてもよい。
【0013】
ステップb)は、類似した後続の推定値を得るように、衛星の天体暦要素に対応する推定値を繰り返し使うステップを含んでもよい。ステップb)は、積[M]−1[D]から天体暦補正ベクトル[A]を計算するするステップを含んでもよく、ここで、[D]は、1組の測定/推定時刻に関する時間差および周波数差の測定値と推定値の差である要素を有するベクトルであり、[M]−1は、1組の測定/推定時刻に関する推定衛星天体暦要素の変化である要素を有する行列[M]の逆行列であり、この変化が、変化前の推定衛星天体暦要素に伴う[D]の値に比べて[D]の大きさが縮小されることをもたらす。[M]の要素は最小二乗平均適合によって得られてもよい。最小二乗平均適合は、特異値分解に基づいていてもよい。[D]および[M]の要素は、必要に応じて、時間差および周波数差における測定誤差に伴う逆数に比例して重み付けされてもよい。
【0014】
較正送信手段は、少なくとも2台の較正送信機、好ましくは少なくとも4台の較正送信機を備えてもよい。
【0015】
方法は、衛星干渉を引き起こす送信機を特定する過程で2機の衛星の天体暦誤差を補償するステップに適用されてもよく、天体暦補償が1機の衛星の天体暦に対して決定されて適用されてもよい。
【0016】
方法は、主衛星および副衛星の両方に対して天体暦誤差を補償するステップに代替的に適用されてもよく、較正送信手段は少なくとも10台の較正送信機を備えてもよい。
【0017】
他の態様において、本発明は、
a)既知の位置の較正送信手段から別の衛星を介して受信される信号レプリカに伴う時間差および周波数差の少なくとも一方を決定する手段と、
b)衛星天体暦要素に対応する推定値を得て、かかる推定値の変化を計算し、対応する測定済みの時間差および/または周波数差とよりよく一致する時間差および周波数差の推定値の少なくとも一方を生じさせる手段と
を備える、衛星の天体暦誤差を補償または補正する装置を提供する。
【0018】
時間差および周波数差の少なくとも一方を決定する手段は、信号レプリカに伴う時間差および周波数差の両方を決定するように構成されてもよい。較正送信手段は、少なくとも2台の較正送信機、そして好ましくは少なくとも4台の較正送信機を備えてもよい。
【0019】
衛星の天体暦要素に対応する推定値を得る手段は、類似した後続の推定値を得るように、衛星の天体暦要素に対応する推定値を繰り返し使うように構成されてもよい。
【0020】
衛星の天体暦要素に対応する推定値を得る手段は、積[M]−1[D]から天体暦補正ベクトル[A]を計算するように構成されてもよく、ここで、[D]は、1組の測定/推定時刻に関する時間差および周波数差の測定値と推定値の差である要素を有するベクトルであり、[M]−1は、1組の測定/推定時刻に関する推定衛星天体暦要素の変化である要素を有する行列[M]の逆行列であり、この変化が、変化前の推定衛星天体暦要素に伴う[D]の値に比べて[D]の大きさが縮小されることをもたらす。
【0021】
衛星の天体暦要素に対応する推定値を得る手段は、最小二乗平均適合によって[M]の要素を得るように構成されてもよく、最小二乗平均適合は、それ自体が特異値分解に基づいていてもよい。
【0022】
衛星の天体暦要素に対応する推定値を得る手段は、必要に応じて、時間差および周波数差における測定誤差に伴う逆数に比例して[D]および[M]の要素に重み付けをするように構成されてもよい。
【0023】
装置は、1機の主衛星の天体暦誤差を補償するためのものであってもよく、較正送信手段は少なくとも2台の較正送信機、好ましくは少なくとも4台の較正送信機を備えてもよい。
【0024】
装置は、衛星干渉を引き起こす送信機を特定する過程で2機の衛星の天体暦誤差を補償するためのものであってもよく、衛星の天体暦要素に対応する推定値を得る手段は天体暦の補償を決定してこれを1機の衛星の天体暦に適用するように構成されてもよい。装置は、主衛星および副衛星の両方に対して天体暦誤差を補償するためのものであってもよく、較正送信手段は少なくとも10台の較正送信機を備えてもよい。
【0025】
さらなる態様において、本発明は、衛星の天体暦誤差の補償または補正に使用され、
a)既知の位置の較正送信手段から種々の衛星を介して受信される信号レプリカに伴う時間差および周波数差の少なくとも一方を決定するステップと、
b)衛星の天体暦要素に対応する推定値を得て、推定値の変化を計算し、対応する測定済みの時間差および/または周波数差とよりよく一致する時間差および周波数差の推定値の少なくとも一方に生じさせるステップと、
を実行するためのコンピュータ装置を制御する適切なキャリア媒体に記録されるプログラムコード命令を備えたコンピュータソフトウェアを提供する。
【0026】
ステップa)は、信号レプリカに伴う時間差および周波数差の両方を決定するステップを備えてもよい。較正送信手段は、少なくとも2台の較正送信機、そして好ましくは4台の較正送信機を備えてもよい。
【0027】
ステップb)は、類似した後続の推定値を得るように、衛星の天体暦要素に対応する推定値を繰り返し使うステップを含んでもよい。ステップb)は、積[M]−1[D]から天体暦補正ベクトル[A]を計算するステップを含んでもよく、ここで、[D]は、1組の測定/推定時刻に関する時間差および周波数差の測定値と推定値の差である要素を有するベクトルであり、[M]−1は、1組の測定/推定時刻に関する推定衛星天体暦要素の変化である要素を有する行列[M]の逆行列であり、この変化が、変化前の推定衛星天体暦要素に伴う[D]の値に比べて[D]の大きさが縮小されることをもたらす。[M]の要素は最小二乗平均適合によって得られてもよい。最小二乗平均適合は、特異値分解に基づいていてもよい。[D]および[M]の要素は、必要に応じて、時間差および周波数差における測定誤差に伴う逆数に比例して重み付けされてもよい。
【0028】
較正送信手段は、少なくとも2台の較正送信機、そして好ましくは少なくとも4台の較正送信機を備えてもよい。
【0029】
ソフトウェアは、衛星干渉を引き起こす送信機を特定する過程で2機の衛星の天体暦誤差を補償するステップに使用されてもよく、天体暦補償が1機の衛星の天体暦に対して決定されて適用されてもよい。
【0030】
ソフトウェアは、主衛星および副衛星の両方に対して天体暦誤差を補償するステップに代替的に使用されてもよく、較正送信手段は少なくとも10台の較正送信機を備えてもよい。
【0031】
本発明がより十分に理解されるように、本発明の実施形態は添付図面を参照して単なる例としてここで説明されることになる。
【発明を実施するための最良の形態】
【0032】
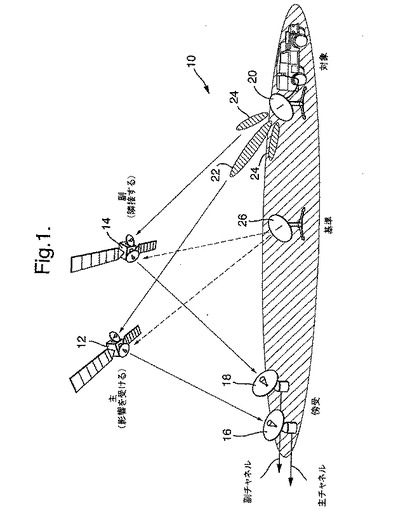
図1は、10によって一般的に示される先行技術の地理位置情報システムを示す。図1では、衛星通信に干渉を引き起こす未知の送信機、すなわち、対象20の位置を求めるためにそれぞれの受信アンテナ16および18によって監視される2機の衛星12および14が使用される。送信機20はマルチローブ送信放射パターンを有し、その主ローブ22および2つの副ローブが示される。1機の衛星12は主ローブ22の放射を受信し、この衛星は主衛星に指定され、その監視受信アンテナ16に伴う処理エレクトロニクス(図示せず)が主チャネルに指定される。他の衛星14は副ローブ24の放射を受信し、この衛星は副衛星に指定され、受信アンテナ18における関連処理エレクトロニクスが副チャネルに指定される。主チャネルおよび副チャネルは、DTOおよびDFOを決定するために信号相関の計算に使用される信号を生成する。
【0033】
また、衛星12および14はともに、既知の位置にある送信機26から基準信号を受信し、これをそれぞれのアンテナ16および18に中継する。この基準信号は、米国特許第6,018,312号明細書に記載されたような対象送信機信号とコヒーレントに検出され、衛星に搭載された局部発振器の正確に既知ではない変換周波数などのシステムバイアスを除去することができ、これら局部発振器の位相不安定性による相関過程への影響を弱める。本明細書における目的のためには、先行技術における慣行と一線を画し、DTO/DFOをTDOA/FDOAとは異なる量として扱うことが好都合である。そこで、TDOAとFDOAは、本明細書では下記によって規定される。
TDOA=DTOT−DTORおよびFDOA=DFOT−DFOR (1)
【0034】
ここで、DTOTとDFOTは対象のDTOとDFOであり、DTORとDFORは米国特許第6,018,312号明細書に記載されたような各場合に測定された基準のDTOとDFOである。したがって、TDOAとFDOAは、それぞれ、基準補正された対象と基準のDTO/DFOと同等であり、対象と基準のDTO/DFOの差である。これらのTDOAおよびFDOAパラメータは、衛星位置に依存し、これらのパラメータおよび基準26の位置の測定時に衛星の位置と速度(すなわち、衛星の天体暦)を知ることによって、対象送信機20の位置が決定されてもよい。
【0035】
式(1)で規定されるようなTDOAおよびFDOAパラメータを採用することは、本発明の目的に適っているが必須でない。これらのパラメータに関係している時間差および周波数差の値は、これらが一貫して使用される限り、たとえば、このような値が都合に応じてTDOAまたはFDOAからある程度オフセットされる可能性がある限り、使用されてもよい。以下で説明される本発明の各例において、TDOAおよびFDOAパラメータの推定値は同等の測定値に適合され、推定された関連差分値は、同様に、同等の測定値に適合され得る。TDOAとFDOAとの関係は、関連差分値が天体暦決定または地理位置情報に使用されるときに考慮される必要がある。
【0036】
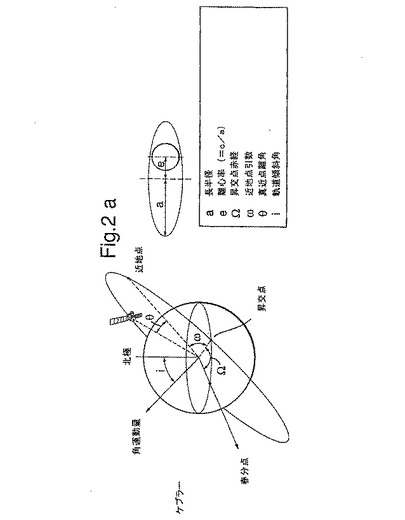
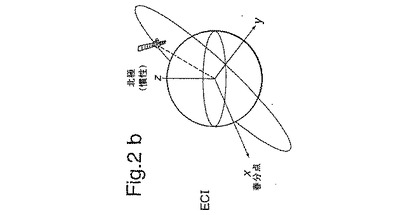
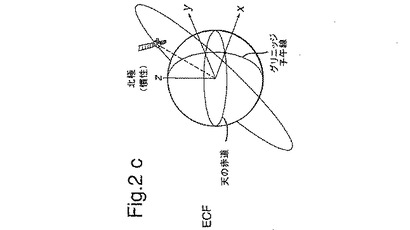
天体暦の形式は使用される座標系に依存する。図2は3つの座標系a、b、およびcを示す。図2aは、周回する物体の運動が地球の原点から宇宙空間の固定点までを基準として記述される場合に最も一般的に参照されるケプラー要素を示す。しかし、さらに簡単には、図2bおよび2cに示されるように、3次元の直交位置ベクトルおよび直交速度ベクトルが使用される。この種の2つの最も一般的な基準座標系は、地球中心慣性座標系(ECI)および地球中心固定座標系(ECF)である。ECI座標系は、その原点を地球の重心に有するが、地球の赤道面と黄道面(春分点)の交点に沿った一定の慣性方向を有する。ECF座標系は、同じ原点を有するが、x軸がグリニッジ子午線(経度ゼロにおける)を通るように地球に固定される。ECF座標系は、地球の自転に従って1恒星日につき1回宇宙空間で自転する。本発明は、選択される座標系とは無関係であるが、本明細書に記載される実施形態において、天体暦は直交ECF形式となる。
【0037】
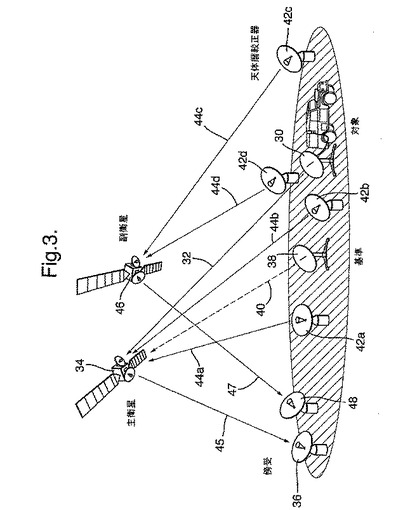
ここで図3を参照すると、本発明の天体暦誤差補償または補正(EEC)手法は、米国特許第6,018,312号明細書におけるようなコヒーレント基準信号を使って図1に関して説明されるようにTDOAおよびFDOAの測定に使用される2衛星地理位置情報法に基づく。前述のように、対象送信機30は、主衛星34に向けて矢印32で示される主ローブを発し、主衛星34はこれを35で中継して主傍受アンテナ36に送る。ここで、説明が複雑にならないように送信機の数の増加を考慮して、送信機の主ローブ、すなわち、ビームの方向のみ示され、すなわち、副ローブは省かれている。
【0038】
既知の位置にある基準送信機38は、鎖線40で示される主ビームを主衛星34に向けて提供し、41で中継して主監視アンテナ36に送る。さらに示されているのは、4台の天体暦較正器送信機(天体暦較正器)42a〜42d(総称42)であり、その2台の42a/42bは、主衛星34に向けられたそれぞれの線44a/44bで示される主ビームを提供し、45で中継して主傍受アンテナ36に送る。他の2台の天体暦較正器42c/42dは、副衛星46に向けられたそれぞれの線44c/44dで示される主ビームを提供し、47で中継して副監視アンテナ48に送る。主監視アンテナ36および副監視アンテナ48は、別の地理的な場所にあってもよいが、この例では単一の監視場所にある。ちなみに、天体暦較正器の主ビームが主衛星と副衛星のどちらに向けられるかは天体暦の補正や補償に影響を与えないので本発明の目的にとって重要でない。
【0039】
天体暦較正器42および基準送信機38はすべて、たとえば、全地球位置測定システム(GPS)の精度で決定される正確に既知の位置を有し、あるいは、他の情報源から決定される緯度と経度を有する。また、天体暦較正器42および基準送信機38は、米国特許第6,018,312号明細書に基づく地理位置情報の基本的特徴である、主衛星と副衛星を介して受信される各信号レプリカ間の優れた相関を与えるために試験されている。天体暦較正器42および基準送信機38は、地理的に十分に離れていることが好ましいが、様々な場所で複数の天体暦較正器を使用することが必須ではなく、後で説明されるように1台のこのような較正器を使ってそれぞれ別の時刻に測定することも可能である。
【0040】
衛星の天体暦の最初の推定値が有効であるものとして、その精度が後で説明される。天体暦較正器42の各々を対象送信機として順々に処理し、図1に関して米国特許第6,018,312号明細書に記載された方法を使って、TDOAおよびFDOAの位置パラメータが天体暦較正器42の各々に対して測定される。この後、天体暦較正器42の各々に対するTDOAおよびFDOAの期待値は、これらの既知の位置に基づいて、主衛星34および副衛星46の位置と速度(すなわち、衛星の天体暦)の先験的な天体暦推定値を使って計算される。この後、TDOAおよびFDOAの測定値と計算値との差が得られ、衛星の天体暦における誤差の推定値が計算される。
【0041】
本発明の方法は、まず概説され、後で詳しく説明されることになる。各衛星天体暦の初期の、すなわち、起動時の1組の天体暦パラメータ(位置と速度のベクトル要素)が好都合な時間原点t0において得られる(後で説明されるように)。この後、この1組の天体暦パラメータは、調整され、すなわち、各TDOAおよびFDOA測定の対応時刻で別々に設定されたそれぞれの天体暦パラメータを提供するように「伝播」される。これは、測定値または「サンプル」が様々な時刻に得られ、衛星が時とともに移動するために各測定時刻が様々な衛星天体暦パラメータの組に対応するという点を酌量するものである。
【0042】
この後、伝播される天体暦パラメータの組はTDOAおよびFDOAのそれぞれの測定値に対応するTDOAおよびFDOAの期待値の計算に使用される。この後、初期の、すなわち、起動時の1組の天体暦パラメータがわずかに変更され、天体暦パラメータは前述のように伝播されてTDOAおよびFDOAの新たな期待値の計算に使用される。TDOAおよびFDOAの計算された新たな期待値とこれに対応する測定値との差を最小化する、パラメータ変更の「最良適合」が生成される。
【0043】
天体暦に大きな変更が必要な場合はこうして計算された天体暦パラメータ変更が不十分なこともあり、そうであれば、この変更は、反復プロセスで新たな起動時の1組として使用される補正済みの1組の天体暦パラメータを生成するために使用されてもよい。このプロセスの各反復において、天体暦の変更は、それぞれの直前の反復において得られた補正済み天体暦パラメータの組から繰り返し計算される。反復は、有意な変化が生じなくなるか、または予定された反復回数の限界に達するまで持続する。
【0044】
本発明の例がここでさらに詳しく説明される。本発明の最初の例において、主衛星34の天体暦のみが誤差があるものと仮定される。1機の衛星に対する天体暦(「エポック」と呼ばれる所与の時点における)は、主衛星の直交ECF位置ベクトル要素x、y、zおよび速度ベクトル要素
【数1】
を含む6×1要素列ベクトル[S]として表わされ得る。ここで、
【数2】
の上付きドットは時間に関する微分を示す。初期の主衛星の天体暦推定値または起動時の天体暦は要素
【数3】
を有するベクトル[SS]として表わされ、[A]はこの起動時の天体暦を真の主衛星天体暦のより良い推定値[S]に変換するのに必要な要素a1〜a6を有する補正の列ベクトルであり、[S]は要素
【数4】
を有する場合、
[S]=[SS]−[A] (1)
であり、あるいは、省略せずに書くと、
【数5】
となる。
【0045】
本発明のEEC手法は、天体暦補正ベクトル[A]の要素a1〜a6を決定する(少なくとも初期段階として)。本発明の本実施形態において、TDOAおよびFDOAの測定は、既知の位置の各々で、時間を隔てたN個の測定サンプルで、地理的に分散された複数台の天体暦較正器42で行なわれる。各サンプルは1機の天体暦較正器に関するTDOAおよびFDOAの両方の測定値である。N個のサンプルの収集は、EECの実施に必要な測定キャンペーンとなる。サンプルは一般に(便宜上)多数の測定サイクルで得られ、各サイクルは順番に選ばれた各天体暦較正器42に関する1個のサンプルを含む。したがって、サンプルの総数Nは、天体暦較正器42の台数、図3では4、にサイクル数を乗じて与えられる。
【0046】
本発明は、本実施形態のTDOAおよびFDOAの測定に限定されない。測定値は、種々の天体暦較正器からの同時測定値と、同じかまたは他の天体暦較正器からの時間的隔たりのある測定値との組合せであってもよい。同時測定値は、複数台の天体暦較正器を包含するのに十分な帯域にわたる複数の収集チャネルまたはサンプリングを使って得られてもよい。
【0047】
本実施形態において、すべてのサンプルは、それぞれ別の時間に測定される(これは必須ではないが)。n番目のサンプル(n=1〜N)は時刻tnで測定され、各サンプルに対する関連期待値(TDOA)nおよび(FDOA)nは、主衛星36および副衛星48の初期起動時の天体暦、基準送信機38の位置、主傍受アンテナ36および副傍受アンテナ48、ならびにn番目のサンプルに伴う天体暦較正器42から計算される。この計算は以下のように実行される。衛星の初期起動時の天体暦は公表されている(後で説明されるように)。天体暦は、衛星運動に起因して時とともに変化するが、時間原点t0における初期起動時の天体暦を有しており、天体暦は衛星の軌道ダイナミックスから別の時刻に対して計算され得る。それゆえ、それぞれの組の天体暦パラメータは、主衛星36および副衛星48の各サンプルの測定時刻t1〜tNに対して計算される。これらの計算された天体暦パラメータを使用すると、期待されるTDOA/FDOA値<TDOA>nおよび<FDOA>nが各サンプル時刻tn(n=1〜N)に対して計算される。
【0048】
測定されるTDOA/FDOA値TDOAnおよびFDOAnは、図3に関して記載される測定手法を使ってt1〜tNの各時刻で得られる。1〜Nのすべてのnに対する期待値または計算値<TDOA>nおよび<FDOA>nは、ベクトルとして表わされ、この後、測定値TDOAnおよびFDOAnのベクトルから差し引かれ、次式で与えられる差の列ベクトル[D]を与える。
【数6】
【0049】
ここで、Δはこの直後の丸括弧内の量TDOA1〜TDOANが差分であることを示す。本発明のEEC手法は、[D]ベクトルをすべての要素がゼロに等しい零ベクトルにできる限り近づける、初期の衛星天体暦における要素の変化を計算することを目指すものである。
【0050】
[A]で[SS]を補正することによって測定位置パラメータに厳密に一致する期待位置パラメータを与えるような式(2)の[A]を導出するために、この例の方法は、[SS]の天体暦要素をわずかに変更しTDOAおよびFDOAに対して予測される値への影響を決定するものである。これは、それぞれの天体暦要素
【数7】
の変化
【数8】
を計算して行なわれる。ここで、前述と同様に、上付きドットは時間に関する微分を示す。
【数9】
の導入に伴う<TDOA>nおよび<FDOA>nの期待値の変化は、それぞれ、時刻tn(n=1〜N)における各サンプルに対して計算される。こうして、<TDOA>nのN個の値の各々に対して∂TDOA(tn)/∂k形の6つの変化が与えられ、<FDOA>nのN個の値の各々に対して∂FDOA(tn)/∂k形の6つの変化が与えられる。ここで、kは
【数10】
である。これらの変化は、TDOAおよびFDOAの推定値がTDOAおよびFDOAの測定値への最良適合となる適合プロセスを使って達せられる。これらの変化は、偏微分の2N×6の要素行列[M]のそれぞれに要素として使用される。[M]は、式(3)における差分行列[D]と、式(1)および(2)における所要の天体暦要素変化列ベクトル[A]とに、次式によって関係付けられている。
【数11】
【0051】
あるいは、省略せずに書くと、
【数12】
【0052】
基準送信機38および天体暦較正器42からの通信信号は、電力が異なる。すなわち、各サンプルに対して測定されたTDOAおよびFDOAパラメータの不確定性は、電力依存性を示し、したがって異なることになる。式(5)は、これらの不確定性を表わすために下記のように不確定性の逆数を使って重み付けされる。
【数13】
【0053】
ここで、στnとσνn(n=1〜N)は、n番目のサンプルに対してそれぞれ測定されたTDOAおよびFDOAの値の不確定性である。
【0054】
両辺に[M]−1を左から掛けて式(6)を整理し、積[M]−1[M]を恒等行列に置き換えると、起動時の天体暦の誤差ベクトル[A]は次式で与えられる。
[A]=[M]−1[D] (7)
【0055】
ここで、[M]−1は、Penrose R,1955,Proceedings of the Cambridge Philosophical Society,51,406−413の「A generalized inverse for matrices」に記載された[M]の一意的なムーアペンローズ型一般化逆行列である。式(7)は、誤差ベクトル[A]、天体暦要素の小さい変化、およびTDOA/FDOA推定/測定差分の間の線形関係である。ただし、衛星の天体暦は[M]を配置するために使用される小さい変化とは著しく異なる量の誤差を有する場合があり、式(7)の線形関係はもはや満足なものではないかもしれない。この場合には、天体暦誤差を検出するために反復アプローチが使用されてもよい。[A]についての最初の計算が行なわれて、天体暦の新たな推定値[S]を生成するために式(1)で使用される。この後、この計算は起動時の天体暦として天体暦の新たな推定値[S]を使って反復される。[M]を配置するために使用される変化は、先行する各反復で[S]に対して行なわれる調整によりよく一致するように各反復において自動的に調整される。正常に動作するシナリオの場合、3〜5回の反復後に満足な収束結果が得られている。
【0056】
衛星34および46の両方の天体暦に誤差がある場合、本発明に従って1機の衛星の天体暦誤差補正に頼って両衛星の位置と速度の値を求めることはできない。しかし、本発明に従った1機の衛星の天体暦誤差補正は、多くの状況において、両衛星の天体暦誤差に起因する地理位置情報誤差を抑制する変化を1機の衛星の天体暦にもたらし得ることが分かっている。厳密に言えば、これは、天体暦誤差の補正それ自体とは対照的な地理位置情報誤差を抑制する天体暦補償である。したがって、両衛星に対して補正された天体暦が得られていないにもかかわらず、この手法では衛星干渉を引き起こす地上送信機の大幅に改善された地理位置情報精度が一般的に得られ、このこと自体が重要な成果である。
【0057】
本発明は、以下の3つのシナリオで2機の衛星を使った地理位置情報性能の改善に使用されてもよい。
他の衛星の天体暦が正確な場合の1機の衛星の天体暦補正
他の衛星の天体暦が不正確な場合の1機の衛星の天体暦補正(すなわち、天体暦補償)
2機の衛星の天体暦補正
【0058】
2機の衛星34および46の天体暦を補正するために、これらの誤差が一緒に計算され得るように式(5)を拡張することが可能である。これによって、両衛星の天体暦が決定され得る。2機の衛星の天体暦の誤差に関する式(6)を拡張すると次式が得られる。
【数14】
【0059】
ここで、主衛星34および副衛星46の天体暦要素の小さい変化は、それぞれ
【数15】
およびダッシュ記号付きの同等表現
【数16】
によって示される。同様に、主衛星34および副衛星46の天体暦要素に対して計算される補正は、それぞれ(a1〜a6)および(a1’〜a6’)によって示される。式(5)および(6)に関連して記述されたように重みが式(8)に含まれる場合、次式が得られる。
【数17】
【0060】
式(9)は、前述された同等の1機の衛星の真のダイナミックスよりも2機の衛星34および46の真のダイナミックスを表す傾向が強いが、ここでは決定されるべきパラメータが多いので、較正キャンペーンではより大きい数(N)の天体暦較正器を使ってサンプリングする。
【0061】
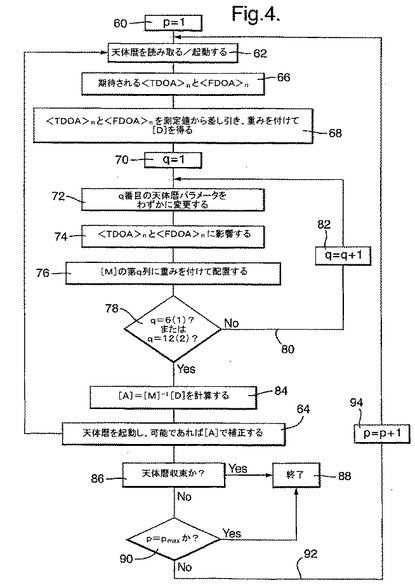
ここで図4を参照すると、コンピュータによって実行される前述の手順のフローチャートが示される。60において、反復回数pが規定されて最初は1に設定され、この後、起動時の組の天体暦パラメータ(「起動時の天体暦」)が、あるいは両衛星の天体暦が補正されなければならない場合は2つの起動時の組の天体暦パラメータが、62において起動時の天体暦の維持段階64から読み取られる。便宜上、本実施形態における「起動時の天体暦」という表現は、状況にそれぞれ見合った1組または2組の天体暦パラメータを含むものとみなされるものとする。段階64は、時間原点t0において第1の最新の起動時の天体暦である初期起動時の天体暦を有し、各最新の起動時の天体暦は繰り返し更新され、後述されるように次の最新の起動時の天体暦を時々作る。66において、時刻t0に対する起動時の天体暦は、時刻tnにおけるサンプルn(n=1〜N)に対する各起動時の天体暦に変換され、得られた天体暦はすべてのサンプル(n=1〜N)に対して期待されるTDOA/FDOA値<TDOA>nおよび<FDOA>nを計算する基礎として使用される。この計算は、1機の衛星の天体暦補正事例に対して前述された通りである。68において、時刻tnに対する推定値<TDOA>nおよび<FDOA>nは、図3に関して記載された手法を使って時刻tnにおいて測定される各TDOA/FDOA値から差し引かれる。この後、不確定性の逆数による重み付けが適用されて式(6)の左辺を与える。
【0062】
天体暦要素の反復回数qが70において規定され最初は1に設定される。72において、q番目の天体暦パラメータに対して小さい変化∂paramqが加えられる。ここで、paramqは、1機の衛星の場合
【数18】
であり、2機の衛星の場合
【数19】
およびダッシュ記号付きの同等表現
【数20】
である。これらのパラメータの最初のパラメータ、すなわち、xの場合、q=1で小さい変化は∂xである。この場合、<TDOA>nおよび<FDOA>nへの小さい変化∂paramqの影響が74においてN個のサンプルすべてに対して計算される。すなわち、微分∂<TDOA>n/∂paramqおよび∂<FDOA>n/∂paramqがn=1〜Nのすべてに対して計算される。その目的は、時刻tnにおいて<TDOA>nおよび<FDOA>nを変更してそれぞれTDOAnおよびFDOAnの測定値にできる限り等しくする1組の∂paramqの値を見付けて差分ベクトル[D]をできる限り小さくすることである。この数学的方法は周知であり説明は省略する。すなわち、これは、 ‘Numerical Recipes in C − The Art of Scientific Computing’,1988,Cambridge University Press,W.H.Press,B.P.Flannery,S.A.Teukolsky and W.T.Vetterling,chapter 14,page 528から取られた最小二乗平均適合(たとえば、特異値分解を使用する)である。この適合のためのデータは、TDOAおよびFDOAの測定値と推定値の差分を備えるベクトル[D]に組み入れられる。各サンプリング時刻tnに求められる6つまたは12の天体暦パラメータの偏微分値で与えられるモデルが適合される。TDOAおよびFDOAの測定値と推定値の差分を最小にする(最小二乗の意味で)、最新の起動時の天体暦パラメータの変化の最適な組合せが得られる。
【0063】
次に、式(6)(1機の衛星)または式(9)(2機の衛星)に示されるように微分値に重み付けが適用され、得られる値は行列[M]の第q列を配置するために76において使用される。
【0064】
天体暦要素の反復は、ここでは、(1)が1機の衛星の天体暦の検討を示す場合に、そして(2)が2機の衛星の天体暦の検討を示す場合に78において数えられる。1機の衛星では、[M]は6列を有しqは1から6まで続き、2機の衛星では、[M]は12列を有しqは1から12まで続く。1機の衛星の事例ではq<6であれば、あるいは、2機の衛星の事例ではq<12であれば、シーケンス72〜78はループ80によって反復し、天体暦要素の反復回数qは各反復に対して82において1だけインクリメントされる。q=6(1機の衛星)または12(2機の衛星)であれば、処理は段階84に移動する。
【0065】
84において、重み付き行列[M]のムーアペンローズ型逆行列[M]−1が計算され、式(7)におけるように天体暦補正ベクトル[A]を得るために[D]を掛けて使用される。[A]は起動時の天体暦の維持段階64に移動され、ここで、最新の起動時の天体暦が更新または補正され、これを、式(1)および(2)に従って真の主衛星の天体暦のより優れた推定値に変換する。この後、このより優れた推定値は段階62で読み取られて後続の反復(もしあれば)に使用され得る。86において、起動時の天体暦が収束しているかどうかが試験され、この点についての基準は最新の更新の直前における最新の起動時の天体暦と更新された天体暦とがわずかしか違わないことである。この基準が満たされると、88において処理が終了する。この基準が満たされなければ、第2の終点基準、すなわち、反復回数pが事前に決められた制限pmaxに等しい第2の終点基準がある。これらの基準がいずれも満たされなければ、反復がループ92によって持続し、94において反復回数が1だけインクリメントされ、処理が読取り開始天体暦段階62に戻る。62において、起動時の天体暦の最近の更新版、すなわち、補正版が64から読み取られ、段階66以降が反復される。代替基準は、TDOAおよびFDOAにおける残留誤差が許容レベル、たとえば、測定誤差以下に低下していることである。
【0066】
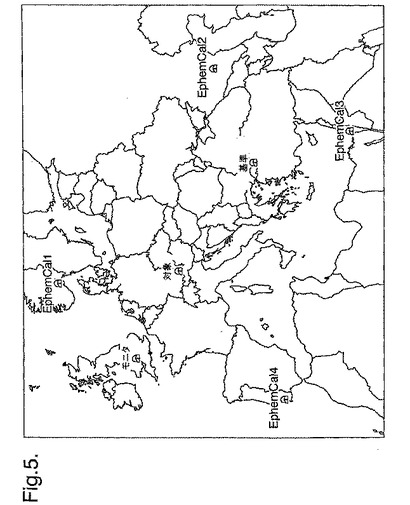
地理位置情報精度に関する本発明の有効性を検討するために、シミュレーションが行なわれた。多数のサイクルの天体暦較正器データ(TDOAおよびFDOAパラメータ)がシミュレーションのための「真の」天体暦として規定されている衛星天体暦を使ってシミュレーションされた。前述のように、1サイクルのデータは、天体暦較正器42の各々に対する(シミュレーション済みまたは実際の)各TDOA測定値および各FDOA測定値を順番に指す。シミュレーションされた測定値は、現実的なガウス誤差を含んでいた。この後、規定された真の天体暦から誤差のある初期起動時の天体暦は、衛星の軌道ダイナミックスの先験的な推定値として使用された。図5は、象徴として描かれたシミュレーション用の地理的な送信機位置を示す欧州、北アフリカ、および中東の地図である。この図は、ノルウェーのオスロ、南ロシアのUrozhaynoyeに近い場所、イスラエルのレボット、およびポルトガルのリスボンにおける4台の天体暦較正器(EphemCal 1〜4)、トルコのブルサにおける基準送信機(基準)、オーストリアのウエルグル近くの対象送信機(対象)、ならびに英国のデフォードにおける2つの傍受アンテナ(図示せず)を有する監視局(モニタ)を示す。
【0067】
較正キャンペーンは、図5に示される4台の天体暦較正器からのサンプルをシミュレーションすることからなるものであった。1分間隔の各起動時刻を有する3つの測定サイクルがシミュレーションされた。シミュレーションのために、異なる複数の測定時刻に対して天体暦を計算してもつじつまが合わないので、所与のサイクル内の各測定は、便宜上、同じ時刻に行なわれるものと仮定された。この後、主衛星天体暦を補正するために、初期起動時の天体暦の誤差は前述された本発明の1衛星EEC手法を使って補正された。
【0068】
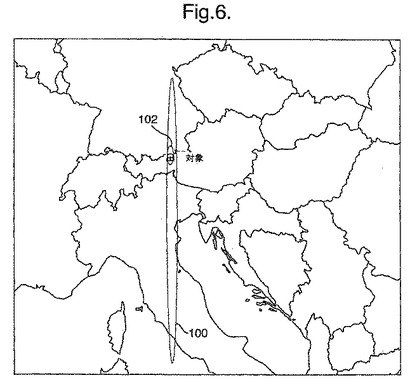
また、本発明の地理位置情報精度への影響を評価するために、規定された真の天体暦に基づいて、図5に示された位置における対象からのサンプル送信のTDOAおよびFDOAがシミュレーションされた。対象送信機のこのサンプルは、較正キャンペーンが終了した1分後に採取されているものとしてシミュレーションされた。2つの地上位置の推定は、対象位置、初期起動時の衛星天体暦を使って導出される一方の位置、および補正された主天体暦(および初期起動時の副天体暦)に基づく他方の位置について行なわれた。これらの位置の推定値が図6に示される。
【0069】
第1の位置の楕円100は、初期起動時の衛星天体暦から計算されたもので、長さが約990kmで95%の信頼性レベルを表わし、すなわち、対象がその内部にある確率は95%である。位置の楕円100の計算は天体暦誤差を考慮している。第2の位置の楕円102は、補正済みの天体暦を使って計算されたもので、TDOA/FDOA測定誤差のみを残してほとんどすべての天体暦誤差が排除されているので長さがわずか25km(約40倍の改善)である。また、第1の楕円100は決して最悪の場合でないことに留意することが重要である。初期起動時の衛星天体暦は、地球表面位置の楕円が存在しないような非常に大きい誤差となり得る。このような場合、本発明によって得られる地理位置情報精度の利益は図6で示されるものよりも明らかに大きいが、これらの利益は比較楕円なしには定量化されえない。
【0070】
位置の楕円100および102は、天体暦誤差とTDOAおよびFDOA測定誤差とに起因するTDOAおよびFDOA誤差から計算されて二乗和平方根によってこれら2つを結合してもよい。本発明のこの例において、位置の楕円は総合誤差に基づく95%の信頼限界を示す境界である。
【0071】
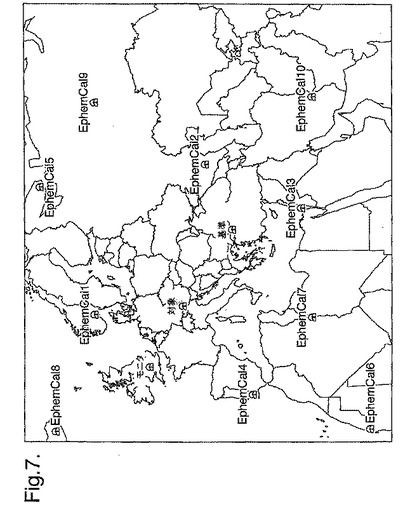
本発明の他の実施形態において、2機の衛星の天体暦が同時に計算される。図7はこの実施形態に使用される衛星地上局を示すもので、モニタ、基準送信機、対象送信機、および天体暦較正器EphemCal 1〜4が図5に関して前述されたように設置された。2機の衛星の天体暦が必要とされたので、新たに6台の天体暦較正器EphemCal 5〜EphemCal10が下記の表1に示された位置に採用された。5台の天体暦較正器EphemCal 1〜5は図3の主衛星34に向けられ、他の5台のEphemCal 6〜10は副衛星46に向けられた(しかし、どの衛星が主でどの衛星が副に指定されるかは重要でない)。
【表1】
【0072】
シミュレーションは、5分間隔の各起動時刻を有する72サイクル(すなわち、6時間に及ぶ)について行なわれた。この後、初期起動時の天体暦の誤差が図4に関して前述された2衛星EEC手法を使って補正され、真の天体暦が推定された。
【0073】
12個の未知数(2×6の天体暦要素)を有する数理問題を解くためには、理論上、少なくとも12個の測定値、たとえば、6個のFDOA測定値と6個のTDOA測定値が必要とされるはずである。これらの測定は、N個の空間的に分離されたEphemCalと、(12−N)個の時間的に分離された測定値を使って行なわれてもよく、ここで、Nは1〜12の範囲の任意の整数である。すなわち、空間的および時間的に分離された測定値が、いずれか一方の測定値すべてを含み他方の測定値を全く含まない場合を含めて、任意の組合せで使用されてもよい。しかしながら、結果は、初期または起動時の天体暦のシナリオ、ノイズ、および信頼性によって影響される。ここで、「シナリオ」は、衛星の位置および速度、関連のある送信機および受信機の地理的な位置、ならびに図1に関して説明された手法で主衛星および副衛星によって受信される各信号レプリカ間の相関関係の程度を意味する。それゆえ、実際の状況においては、より多くの測定値、たとえば、4台または5台のEphemCalの複数サイクルが必要とされる場合があり、さらに、より多くのサイクルを使うと、結果が制約されてゆるぎないものとなる。
【0074】
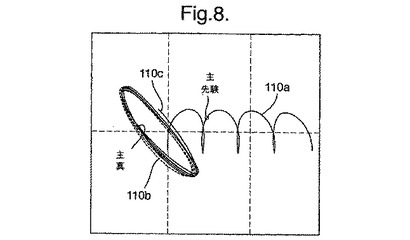
ここで図8を参照すると、a)初期起動時の天体暦(すなわち、先験または事前補正)、b)真の衛星天体暦、およびc)本発明に従って初期起動時の天体暦から計算された天体暦から導出される主衛星に対する衛星地上航跡(4日にわたって伝播された)110a、110b(破線)および110c(実線)が示される。地上航跡は、ある期間にわたる衛星真下の地球表面上の一連の点である。(真の)航跡110bと(計算された)航跡110cはほぼ一致しており、本発明に従って補正された天体暦が真の衛星天体暦の優れた推定値を与えることを示している。これらの真の航跡と計算された航跡は、2つの場合にほとんど同じ衛星の軌道ダイナミックスであるため解明が困難である。航跡110aに対する初期起動時(先験的な)の衛星天体暦は、衛星の軌道ダイナミックスに関して得られるデータのみが公称経度であり、かつ軌道は(ほぼ)地球から見て静止しているという事実から最悪の場合のシナリオであると考えられる。これらのデータは、指定された時刻における直交ECF天体暦の計算に使用される。少なくともこの基本情報が有効でないとは考えにくく、かなり正確な起動時の天体暦が北米航空宇宙防衛司令部(NORAD)の総合ウェブサイトリスト(たとえば、www.celestrak.com参照)に掲載されており、このリストは「2行軌道要素」と呼ばれるタイプの天体暦を提供している。
【0075】
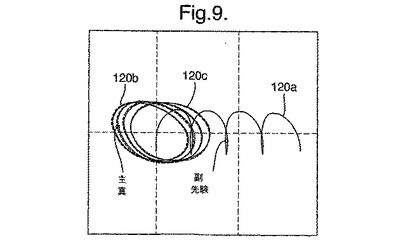
ここで図9を参照すると、この図は、副衛星に適用されることを除いて図8と同等である。この図は、a)初期起動時(すなわち、先験または事前補正)天体暦、b)真の衛星天体暦、およびc)本発明に従って計算された天体暦から導出される衛星の地上航跡120a、120b(鎖線)、および120c(実線)を示す。ここでも、(真の)航跡120bと(計算された)航跡120cはほぼ一致しており、計算された天体暦が真の衛星天体暦の優れた推定値であることを示している。
【0076】
下記の表2は、初期起動時の(先験的な)天体暦要素、本発明に従って計算された天体暦要素、および真の天体暦要素を一覧表で示す。さらに示されているのは、データがシミュレーションされて計算された天体暦要素と真の天体暦要素の絶対差である。天体暦要素xにおいて、その差は100万分の1よりも小さい。本発明に従って計算された天体暦要素は、どの1つの位置座標においても200m以下の誤差があり、位置座標の結果に230m rms以下の誤差がある。さらに、速度誤差はわずか0.04m/sであり、これらの誤差は、地球表面の上方約35,800km(地球中心から静止軌道まで42,164km)の軌道高度にある衛星に関するものであった。衛星速度は最大3m/s(ECF座標系において。ECI座標系においては最大3km/s)であった。真の天体暦と計算された天体暦との差分位置ベクトルは、天体暦が伝播された24時間にわたって主衛星と副衛星の両方に対して600mを超えることはなく、その後の48時間にわたって900m以下のままの大きさを有した。これらの値は、多くの測定キャンペーンに対して得られた値の典型であった。
【表2】
【0077】
本発明のEEC手法において、EphemCal局の物理的数よりもEphemCal測定値の数の方が重要である。EECは、EphemCal局を1つだけ使って、たとえば、6時間の間10分ごとにサンプリングを行ない、36のTDOAおよびFDOA測定値を提供することができる。これは、理想的でないにしても、十分に良好な測定環境において有効な天体暦パラメータの結果を提供し得る。複数のEphemCal局を使うと、1つのこのような局を使用する場合に比べて結果が改善される可能性がある。さらに、非常に精度の高い初期天体暦または起動時の天体暦が使用されると、本発明のEEC手法は収束しない可能性や不正な解に収束する可能性が低くなる。不正な解は、期待誤差の範囲外にあるTDOAおよび/またはFDOAの残差を得ることによって示されてもよい。さらに、非常に精度の高い起動時の天体暦の場合、ほんのわずかな測定値があれば収束し、この逆もまた真である。先に述べたように、前述の本発明の各例において、各EphemCal測定値は2つの測定量TDOAおよびFDOAを提供し、その結果、天体暦の6つまたは12の未知数を解くためには、それぞれ、少なくとも3つまたは6つのEphemCal測定値を必要とし、すなわち、結合される測定量の数は少なくとも未知数の数に等しくなければならない。しかし、実際には、これは不利な測定条件において十分でないかもしれない。さらに、1分間隔で採取される1台のEphemCalの3つの測定値は、地理的に離れている3台の異なるEphemCalから3つの測定値を採取する場合、またははるかに大きい測定間隔、たとえば2時間で、1台のEphemCalから3つの測定値を採取する場合よりも有効性がはるかに低くなる可能性がある。EphemCal測定値が空間次元と時間次元の少なくとも一方において十分に離れていれば、結果は改善する傾向がある。経験によれば、地理的に十分に離れた4つ以上のEphemCal局を使うと妥当な結果が短時間で実現する可能性があるが、4つが最小限度ではない。
【0078】
本発明のシミュレーションは、TDOAおよびFDOAを組み合わせて行なわれている。結果は以下のように得られた。
a)天体暦誤差の補償(すなわち、1機の衛星の補正):各測定の組が5分隔てられた2台の天体暦較正器で72の測定組(すなわち、合計6時間)のTDOAおよびFDOAが、10−7sのTDOA測定誤差と10−3HzのFDOA測定誤差に対して56mのrms位置誤差と4×10−3m/sのrms速度誤差を提供する。
b)天体暦誤差補正(すなわち、2機の衛星の補正):各測定の組が10分隔てられた4台の天体暦較正器で72の測定の組(すなわち、合計12時間)のTDOAおよびFDOAが、10−7sのTDOA測定誤差と10−3HzのFDOA測定誤差に対して約700mのrms位置誤差と約0.50m/sのrms速度誤差を提供する。
【0079】
また、本発明のシミュレーションは、1種類の測定データのみ、すなわち、TDOAデータまたはFDOAデータの両方でなくいずれか一方を使って1機の衛星の補償および2機の衛星の補正に対して行なわれた。目的は、これら2つの代替的アプローチの実行可能性を判断することであった。TDOAデータのみまたはFDOAデータのみを使ったこれらの補償および補正機能の性能は、いくつかの要因、データの正確さ、較正器またはEphemCal局の数、およびシナリオに加えて測定値の数に依存する。
【0080】
1機の衛星の補償シミュレーションが、「TDOAのみ」のデータおよび「FDOAのみ」のデータを使って行なわれ、結果が下記の表3Aおよび3Bにそれぞれ示されている。この表および後続の表において、「N_Sites」は較正器またはEphemCal局の数を意味し、「Inc_min」は一連の測定間の分数を意味し、「N_count」は測定値数を意味し、「収束なし」は補償の実行が可能でなかったことを意味する。
【表3A】
【表3B】
【0081】
表3Aおよび3Bのデータは、左欄に示されるように1〜10台の較正器(N_Site=1〜10)を使って得られた。これらのデータは、1種類の測定値(すなわち、TDOA、FDOAの一方であって両方ではない)が1機の衛星の補償に使用され得ることを示した。誤差は「現実的な」値、すなわち、現在の実務において遭遇する誤差値といえるものである。
【0082】
2機の衛星の補正シミュレーションは、非常に精度の高い「TDOAのみの」データを使って行なわれており、結果が下記の表4に示される。
【表4】
【0083】
表4は、非常に精度の高いTDOAのみの測定値(誤差=10−12s)を使っても1台または2台の較正器しか使用されない場合はrms(二乗平均平方根)位置誤差が大きいことを示す。したがって、3台および好ましくは4台の較正器が望ましい。3台の較正器が使用された場合でも、位置誤差が大きいことがあるが、速度誤差は許容されることがある。4台の較正器が使用される場合、位置誤差および速度誤差は3台の較正器の同等の誤差と比べて2桁以上小さくなる。5番目の較正器を追加してもほとんど相違がない。
【0084】
2機の衛星の補正シミュレーションは、現実的な精度の「TDOAのみの」データ(誤差=10−7s)を使って行なわれており、結果が下記の表5に示される。
【表5】
【0085】
表5のシミュレーションデータは、10台の較正器を用いて現実的な精度のTDOAのみの測定値を使って得られたもので、大きい位置誤差と速度誤差を示している。したがって、使用したい較正器の数が10台程度であるとすれば、表5は適正範囲内での誤差の補正が現実的な精度のTDOAのみの測定値を使って得られなかったことを示している。
【0086】
2機の衛星の補正シミュレーションは、非常に精度の高い「FDOAのみの」データを使って行なわれており、結果が下記の表6に示される。
【表6】
【0087】
表6は、非常に精度の高いFDOAのみの測定値とともに、4台以上の較正器を使って適度に小さい誤差を有する天体暦補正が得られたことを示す。
【0088】
2機の補正シミュレーションは、現実的な精度の「FDOAのみの」データを使って行なわれており、結果が下記の表7に示される。
【表7】
【0089】
表7は、現実的な精度のFDOAのみの測定値とともに、10台以上の較正器を使って適度に小さい誤差を有する天体暦補正が得られたことを示す。
【0090】
表3から表7のデータは、測定精度と較正器の台数が十分であるとの条件で、前述のTDOAおよびFDOAの両方の代りに、TDOAまたはFDOA測定値のみを使って衛星の天体暦誤差を補正または補償する現在利用可能な技術があれば実現可能であることを示す。
【0091】
前述の各式は、適切なキャリア媒体に記録され従来のコンピュータシステムで起動しているプログラムコード命令を備える適切なコンピュータソフトウェアによって明確に評価され得る。キャリア媒体は、メモリ、磁気テープ、フロッピー(登録商標)またはコンパクトまたは光ディスク、あるいはその他のハードウェア記録媒体などの市販品であってもよく、あるいは、これは電気信号や光信号であってもよい。このようなソフトウェアは、よく知られている計算手順を含むので、熟練したプログラマにとっては発明を必要とせずに前述の説明から実行することが容易である。
【図面の簡単な説明】
【0092】
【図1】先行技術の地理位置情報システムを示す。
【図2a】衛星の天体暦パラメータを規定するために使用されるケプラー座標系を示す。
【図2b】衛星の天体暦パラメータを規定するために使用される直交座標系を示す。
【図2c】衛星の天体暦パラメータを規定するために使用される直交座標系を示す。
【図3】本発明の地理位置情報システムを図式的に示す。
【図4】一連の組の補正済み天体暦パラメータがこのような組をさらに生成するために使用される本発明の反復法における各ステップのフローチャートを示す。
【図5】図3のシステムで使用されるモニタ、基準送信機、および較正送信機の位置の例を示す。
【図6】1機の衛星の天体暦における誤差を補償する本発明のシミュレーションで生成される地理位置情報の改善を示す。
【図7】2機の衛星の天体暦における誤差の補償に使用されるモニタ、基準送信機、および較正送信機の位置の例を示す。
【図8】図3の主衛星に関して、a)初期起動時の天体暦、b)真の衛星天体暦、およびc)本発明に従って計算された天体暦から導出された衛星の地上航跡を示す。
【図9】副衛星に適用されることを除いて図8と同じである。
【技術分野】
【0001】
本発明は、衛星の天体暦誤差に関し、特に(限定的ではないが)、天体暦誤差が原因で生じる地理位置情報測定値における誤差の判定および/または補償に関する。
【背景技術】
【0002】
衛星の天体暦または天体暦の設定は、少なくとも6つのパラメータと関連時刻のリストである。6つのパラメータと関連時刻からは、地球軌道周回衛星の宇宙空間における位置および速度を計算することが可能である。これは様々な意味で重要な量であるが、1つの特に重要な使途は、地理位置情報の分野にあり、すなわち、衛星通信チャネルの不正使用または干渉に関与する地上送信機または地上局の特定である。従来の地理位置情報技術が使用される前に衛星の天体暦情報を入手する必要がある。天体暦は、その座標系に依存する形式を有する。周回する物体の運動が地球の原点から宇宙空間の固定点までに関連して記述される場合にケプラー要素が最も一般的に参照される。この種の2つの最も一般的な基準座標系は、地球中心慣性座標系(ECI)および地球中心固定座標系(ECF)である。
【0003】
衛星への不正アクセスは、単なる迷惑から合法的なユーザに対する衛星へのアクセスの完全な拒否に至るまで問題は様々である。衛星を利用したサービスの急増、個人衛星通信の出現、周回軌道衛星によって占められる静止弧の輻輳の増加、およびテレビ放送の妨害電波に起因する干渉の発生は増加している。干渉は、人的ミス(たとえば、正しく整列されていないアンテナ)や装置の障害によって生じる場合が多いが、帯域幅の悪用や合法的なユーザへのサービス拒否といった意図的な企ての表れである場合もある。
【0004】
衛星干渉を撲滅するためには、衛星干渉の原因である地上局送信機を地理的に特定する必要がある。このような地理位置情報は周知であり、現在、衛星の天体暦誤差が重大な(通常、最も主要な)誤差の源である。
【0005】
1982年3月のIEEE Trans.on Aerospace and Electronic Systems,Vol.AES−18,No.2において、P C Chestnutは、未知信号源を特定する基本的な技術を記載しており、この技術は、受信局までの2つの独立した信号経路に沿って中継される信号源からの信号のレプリカの到達時間差(TDOA)および/または到達周波数差(FDOA)の決定を含む。また、TDOAおよびFDOAは、それぞれ、差分時間オフセット(DTO)と差分周波数オフセット(DFO)または差分ドップラーとして先行技術において知られている。2つの受信信号からのDTOおよびDFOの決定は、1981年6月のIEEE Trans.on Acoustics Speech and Signal Processing,Vol.ASSP−29,No.3において、S Stein著の「Algorithms for Ambiguity Function Processing」に記載されている。この技術は、試行時間シフトを有する受信信号と互いに対する周波数オフセットとの相関の計算を含む。この相関を最大化する時間シフトと周波数オフセットとは、衛星に導入されるオフセットの補正を受ける所要のDTOおよびDFOである。米国特許第5,008,679号明細書に開示されているように、DTOおよびDFOから、地球表面の干渉する送信機の位置が決定(地理位置が特定)され得る。この特許は、TDOA(またはDTO)およびFDOA(またはDFO)測定値を使った2機の静止中継衛星の対象送信機の位置を開示している。一定のTDOAまたはFDOAの点の軌跡は、位置線(LOP)と呼ばれる曲線を規定する地球の表面を遮る面である。TDOAおよびFDOAの測定は、決定される対象送信機の位置で交差する2つのLOPを提供する。
【0006】
米国特許第6,018,312号明細書(Haworth)は、位相同期の基準信号を使った誤差補正を有する衛星を介した地理位置情報を開示している。米国特許第5,594,452号明細書(Webberら)には、ブロードバンド法を使った関連技術が開示されている。米国特許第6,618,009号明細書(Griffinら)は、時間依存性DTOおよびDFOを有する地理位置情報に関する。米国特許第6,677,893号明細書(Rideoutら)は、周波数アジル干渉を有する地理位置情報に関する。
【0007】
米国特許第6,018,312号明細書のコヒーレント基準法は、天体暦誤差の影響を緩和するもので、これらの影響は対象−基準間隔が小さくなるにつれて小さくなる。残念ながら、基準送信機が対象送信機に比較的近い場合でも、天体暦誤差は、典型的に、得られた地理位置情報における主要な不確定要素であることに変りはない。
【発明の開示】
【発明が解決しようとする課題】
【0008】
先行技術の地理位置情報の精度は、計算に使用される2機の衛星の天体暦精度に大きく依存する。衛星測距測定およびこれに続く天体暦計算は、通常、地上局が衛星を追跡し得る十分な精度でのみ行なわれる。衛星オペレータが戦略要件を計算し得るさらに詳細な天体暦データが生成されることもあるが、これらの戦略要件は、通常、計算に24時間かかり、当然のことながら、ネットワークユーザに提供されない。正確な地理位置情報に必要な高精度天体暦の収集は稀であり、天体暦誤差は得られる地理位置情報における誤差の主要源であることが多い。
【0009】
本発明の目的は、衛星の天体暦誤差の測定方法および/または衛星の天体暦誤差が原因で生じる地理位置情報測定値の誤差の補償方法を提供することである。
【課題を解決するための手段】
【0010】
本発明は、
a.既知の位置の較正送信手段から種々の衛星を介して受信される信号レプリカに伴う時間差および周波数差の少なくとも一方を決定するステップと、
b.衛星の天体暦要素に対応する推定値を得て、推定値の変化を計算し、対応する測定済みの時間差および/または周波数差とよりよく一致する時間差および周波数差の推定値の少なくとも一方を生じさせるステップと
を備える、衛星の天体暦誤差を補償または補正する方法を提供する。
【0011】
本発明は、衛星の天体暦誤差を有する1機の衛星と2機の衛星のどちらに使用されるかに応じて衛星の天体暦誤差を補償または補正する。本発明は、特に(ただし、限定するものではなく)、衛星通信チャネルを不正使用したり、衛星通信チャネルに干渉を起こしたりする地上送信機の地理位置情報を使用するために、より正確な天体暦データを得られるようにするという長所を備える。
【0012】
ステップa)は、信号レプリカに伴う時間差および周波数差の両方を決定するステップを備えてもよい。較正送信手段は、少なくとも2台の較正送信機、そして好ましくは少なくとも4台の較正送信機を備えてもよい。
【0013】
ステップb)は、類似した後続の推定値を得るように、衛星の天体暦要素に対応する推定値を繰り返し使うステップを含んでもよい。ステップb)は、積[M]−1[D]から天体暦補正ベクトル[A]を計算するするステップを含んでもよく、ここで、[D]は、1組の測定/推定時刻に関する時間差および周波数差の測定値と推定値の差である要素を有するベクトルであり、[M]−1は、1組の測定/推定時刻に関する推定衛星天体暦要素の変化である要素を有する行列[M]の逆行列であり、この変化が、変化前の推定衛星天体暦要素に伴う[D]の値に比べて[D]の大きさが縮小されることをもたらす。[M]の要素は最小二乗平均適合によって得られてもよい。最小二乗平均適合は、特異値分解に基づいていてもよい。[D]および[M]の要素は、必要に応じて、時間差および周波数差における測定誤差に伴う逆数に比例して重み付けされてもよい。
【0014】
較正送信手段は、少なくとも2台の較正送信機、好ましくは少なくとも4台の較正送信機を備えてもよい。
【0015】
方法は、衛星干渉を引き起こす送信機を特定する過程で2機の衛星の天体暦誤差を補償するステップに適用されてもよく、天体暦補償が1機の衛星の天体暦に対して決定されて適用されてもよい。
【0016】
方法は、主衛星および副衛星の両方に対して天体暦誤差を補償するステップに代替的に適用されてもよく、較正送信手段は少なくとも10台の較正送信機を備えてもよい。
【0017】
他の態様において、本発明は、
a)既知の位置の較正送信手段から別の衛星を介して受信される信号レプリカに伴う時間差および周波数差の少なくとも一方を決定する手段と、
b)衛星天体暦要素に対応する推定値を得て、かかる推定値の変化を計算し、対応する測定済みの時間差および/または周波数差とよりよく一致する時間差および周波数差の推定値の少なくとも一方を生じさせる手段と
を備える、衛星の天体暦誤差を補償または補正する装置を提供する。
【0018】
時間差および周波数差の少なくとも一方を決定する手段は、信号レプリカに伴う時間差および周波数差の両方を決定するように構成されてもよい。較正送信手段は、少なくとも2台の較正送信機、そして好ましくは少なくとも4台の較正送信機を備えてもよい。
【0019】
衛星の天体暦要素に対応する推定値を得る手段は、類似した後続の推定値を得るように、衛星の天体暦要素に対応する推定値を繰り返し使うように構成されてもよい。
【0020】
衛星の天体暦要素に対応する推定値を得る手段は、積[M]−1[D]から天体暦補正ベクトル[A]を計算するように構成されてもよく、ここで、[D]は、1組の測定/推定時刻に関する時間差および周波数差の測定値と推定値の差である要素を有するベクトルであり、[M]−1は、1組の測定/推定時刻に関する推定衛星天体暦要素の変化である要素を有する行列[M]の逆行列であり、この変化が、変化前の推定衛星天体暦要素に伴う[D]の値に比べて[D]の大きさが縮小されることをもたらす。
【0021】
衛星の天体暦要素に対応する推定値を得る手段は、最小二乗平均適合によって[M]の要素を得るように構成されてもよく、最小二乗平均適合は、それ自体が特異値分解に基づいていてもよい。
【0022】
衛星の天体暦要素に対応する推定値を得る手段は、必要に応じて、時間差および周波数差における測定誤差に伴う逆数に比例して[D]および[M]の要素に重み付けをするように構成されてもよい。
【0023】
装置は、1機の主衛星の天体暦誤差を補償するためのものであってもよく、較正送信手段は少なくとも2台の較正送信機、好ましくは少なくとも4台の較正送信機を備えてもよい。
【0024】
装置は、衛星干渉を引き起こす送信機を特定する過程で2機の衛星の天体暦誤差を補償するためのものであってもよく、衛星の天体暦要素に対応する推定値を得る手段は天体暦の補償を決定してこれを1機の衛星の天体暦に適用するように構成されてもよい。装置は、主衛星および副衛星の両方に対して天体暦誤差を補償するためのものであってもよく、較正送信手段は少なくとも10台の較正送信機を備えてもよい。
【0025】
さらなる態様において、本発明は、衛星の天体暦誤差の補償または補正に使用され、
a)既知の位置の較正送信手段から種々の衛星を介して受信される信号レプリカに伴う時間差および周波数差の少なくとも一方を決定するステップと、
b)衛星の天体暦要素に対応する推定値を得て、推定値の変化を計算し、対応する測定済みの時間差および/または周波数差とよりよく一致する時間差および周波数差の推定値の少なくとも一方に生じさせるステップと、
を実行するためのコンピュータ装置を制御する適切なキャリア媒体に記録されるプログラムコード命令を備えたコンピュータソフトウェアを提供する。
【0026】
ステップa)は、信号レプリカに伴う時間差および周波数差の両方を決定するステップを備えてもよい。較正送信手段は、少なくとも2台の較正送信機、そして好ましくは4台の較正送信機を備えてもよい。
【0027】
ステップb)は、類似した後続の推定値を得るように、衛星の天体暦要素に対応する推定値を繰り返し使うステップを含んでもよい。ステップb)は、積[M]−1[D]から天体暦補正ベクトル[A]を計算するステップを含んでもよく、ここで、[D]は、1組の測定/推定時刻に関する時間差および周波数差の測定値と推定値の差である要素を有するベクトルであり、[M]−1は、1組の測定/推定時刻に関する推定衛星天体暦要素の変化である要素を有する行列[M]の逆行列であり、この変化が、変化前の推定衛星天体暦要素に伴う[D]の値に比べて[D]の大きさが縮小されることをもたらす。[M]の要素は最小二乗平均適合によって得られてもよい。最小二乗平均適合は、特異値分解に基づいていてもよい。[D]および[M]の要素は、必要に応じて、時間差および周波数差における測定誤差に伴う逆数に比例して重み付けされてもよい。
【0028】
較正送信手段は、少なくとも2台の較正送信機、そして好ましくは少なくとも4台の較正送信機を備えてもよい。
【0029】
ソフトウェアは、衛星干渉を引き起こす送信機を特定する過程で2機の衛星の天体暦誤差を補償するステップに使用されてもよく、天体暦補償が1機の衛星の天体暦に対して決定されて適用されてもよい。
【0030】
ソフトウェアは、主衛星および副衛星の両方に対して天体暦誤差を補償するステップに代替的に使用されてもよく、較正送信手段は少なくとも10台の較正送信機を備えてもよい。
【0031】
本発明がより十分に理解されるように、本発明の実施形態は添付図面を参照して単なる例としてここで説明されることになる。
【発明を実施するための最良の形態】
【0032】
図1は、10によって一般的に示される先行技術の地理位置情報システムを示す。図1では、衛星通信に干渉を引き起こす未知の送信機、すなわち、対象20の位置を求めるためにそれぞれの受信アンテナ16および18によって監視される2機の衛星12および14が使用される。送信機20はマルチローブ送信放射パターンを有し、その主ローブ22および2つの副ローブが示される。1機の衛星12は主ローブ22の放射を受信し、この衛星は主衛星に指定され、その監視受信アンテナ16に伴う処理エレクトロニクス(図示せず)が主チャネルに指定される。他の衛星14は副ローブ24の放射を受信し、この衛星は副衛星に指定され、受信アンテナ18における関連処理エレクトロニクスが副チャネルに指定される。主チャネルおよび副チャネルは、DTOおよびDFOを決定するために信号相関の計算に使用される信号を生成する。
【0033】
また、衛星12および14はともに、既知の位置にある送信機26から基準信号を受信し、これをそれぞれのアンテナ16および18に中継する。この基準信号は、米国特許第6,018,312号明細書に記載されたような対象送信機信号とコヒーレントに検出され、衛星に搭載された局部発振器の正確に既知ではない変換周波数などのシステムバイアスを除去することができ、これら局部発振器の位相不安定性による相関過程への影響を弱める。本明細書における目的のためには、先行技術における慣行と一線を画し、DTO/DFOをTDOA/FDOAとは異なる量として扱うことが好都合である。そこで、TDOAとFDOAは、本明細書では下記によって規定される。
TDOA=DTOT−DTORおよびFDOA=DFOT−DFOR (1)
【0034】
ここで、DTOTとDFOTは対象のDTOとDFOであり、DTORとDFORは米国特許第6,018,312号明細書に記載されたような各場合に測定された基準のDTOとDFOである。したがって、TDOAとFDOAは、それぞれ、基準補正された対象と基準のDTO/DFOと同等であり、対象と基準のDTO/DFOの差である。これらのTDOAおよびFDOAパラメータは、衛星位置に依存し、これらのパラメータおよび基準26の位置の測定時に衛星の位置と速度(すなわち、衛星の天体暦)を知ることによって、対象送信機20の位置が決定されてもよい。
【0035】
式(1)で規定されるようなTDOAおよびFDOAパラメータを採用することは、本発明の目的に適っているが必須でない。これらのパラメータに関係している時間差および周波数差の値は、これらが一貫して使用される限り、たとえば、このような値が都合に応じてTDOAまたはFDOAからある程度オフセットされる可能性がある限り、使用されてもよい。以下で説明される本発明の各例において、TDOAおよびFDOAパラメータの推定値は同等の測定値に適合され、推定された関連差分値は、同様に、同等の測定値に適合され得る。TDOAとFDOAとの関係は、関連差分値が天体暦決定または地理位置情報に使用されるときに考慮される必要がある。
【0036】
天体暦の形式は使用される座標系に依存する。図2は3つの座標系a、b、およびcを示す。図2aは、周回する物体の運動が地球の原点から宇宙空間の固定点までを基準として記述される場合に最も一般的に参照されるケプラー要素を示す。しかし、さらに簡単には、図2bおよび2cに示されるように、3次元の直交位置ベクトルおよび直交速度ベクトルが使用される。この種の2つの最も一般的な基準座標系は、地球中心慣性座標系(ECI)および地球中心固定座標系(ECF)である。ECI座標系は、その原点を地球の重心に有するが、地球の赤道面と黄道面(春分点)の交点に沿った一定の慣性方向を有する。ECF座標系は、同じ原点を有するが、x軸がグリニッジ子午線(経度ゼロにおける)を通るように地球に固定される。ECF座標系は、地球の自転に従って1恒星日につき1回宇宙空間で自転する。本発明は、選択される座標系とは無関係であるが、本明細書に記載される実施形態において、天体暦は直交ECF形式となる。
【0037】
ここで図3を参照すると、本発明の天体暦誤差補償または補正(EEC)手法は、米国特許第6,018,312号明細書におけるようなコヒーレント基準信号を使って図1に関して説明されるようにTDOAおよびFDOAの測定に使用される2衛星地理位置情報法に基づく。前述のように、対象送信機30は、主衛星34に向けて矢印32で示される主ローブを発し、主衛星34はこれを35で中継して主傍受アンテナ36に送る。ここで、説明が複雑にならないように送信機の数の増加を考慮して、送信機の主ローブ、すなわち、ビームの方向のみ示され、すなわち、副ローブは省かれている。
【0038】
既知の位置にある基準送信機38は、鎖線40で示される主ビームを主衛星34に向けて提供し、41で中継して主監視アンテナ36に送る。さらに示されているのは、4台の天体暦較正器送信機(天体暦較正器)42a〜42d(総称42)であり、その2台の42a/42bは、主衛星34に向けられたそれぞれの線44a/44bで示される主ビームを提供し、45で中継して主傍受アンテナ36に送る。他の2台の天体暦較正器42c/42dは、副衛星46に向けられたそれぞれの線44c/44dで示される主ビームを提供し、47で中継して副監視アンテナ48に送る。主監視アンテナ36および副監視アンテナ48は、別の地理的な場所にあってもよいが、この例では単一の監視場所にある。ちなみに、天体暦較正器の主ビームが主衛星と副衛星のどちらに向けられるかは天体暦の補正や補償に影響を与えないので本発明の目的にとって重要でない。
【0039】
天体暦較正器42および基準送信機38はすべて、たとえば、全地球位置測定システム(GPS)の精度で決定される正確に既知の位置を有し、あるいは、他の情報源から決定される緯度と経度を有する。また、天体暦較正器42および基準送信機38は、米国特許第6,018,312号明細書に基づく地理位置情報の基本的特徴である、主衛星と副衛星を介して受信される各信号レプリカ間の優れた相関を与えるために試験されている。天体暦較正器42および基準送信機38は、地理的に十分に離れていることが好ましいが、様々な場所で複数の天体暦較正器を使用することが必須ではなく、後で説明されるように1台のこのような較正器を使ってそれぞれ別の時刻に測定することも可能である。
【0040】
衛星の天体暦の最初の推定値が有効であるものとして、その精度が後で説明される。天体暦較正器42の各々を対象送信機として順々に処理し、図1に関して米国特許第6,018,312号明細書に記載された方法を使って、TDOAおよびFDOAの位置パラメータが天体暦較正器42の各々に対して測定される。この後、天体暦較正器42の各々に対するTDOAおよびFDOAの期待値は、これらの既知の位置に基づいて、主衛星34および副衛星46の位置と速度(すなわち、衛星の天体暦)の先験的な天体暦推定値を使って計算される。この後、TDOAおよびFDOAの測定値と計算値との差が得られ、衛星の天体暦における誤差の推定値が計算される。
【0041】
本発明の方法は、まず概説され、後で詳しく説明されることになる。各衛星天体暦の初期の、すなわち、起動時の1組の天体暦パラメータ(位置と速度のベクトル要素)が好都合な時間原点t0において得られる(後で説明されるように)。この後、この1組の天体暦パラメータは、調整され、すなわち、各TDOAおよびFDOA測定の対応時刻で別々に設定されたそれぞれの天体暦パラメータを提供するように「伝播」される。これは、測定値または「サンプル」が様々な時刻に得られ、衛星が時とともに移動するために各測定時刻が様々な衛星天体暦パラメータの組に対応するという点を酌量するものである。
【0042】
この後、伝播される天体暦パラメータの組はTDOAおよびFDOAのそれぞれの測定値に対応するTDOAおよびFDOAの期待値の計算に使用される。この後、初期の、すなわち、起動時の1組の天体暦パラメータがわずかに変更され、天体暦パラメータは前述のように伝播されてTDOAおよびFDOAの新たな期待値の計算に使用される。TDOAおよびFDOAの計算された新たな期待値とこれに対応する測定値との差を最小化する、パラメータ変更の「最良適合」が生成される。
【0043】
天体暦に大きな変更が必要な場合はこうして計算された天体暦パラメータ変更が不十分なこともあり、そうであれば、この変更は、反復プロセスで新たな起動時の1組として使用される補正済みの1組の天体暦パラメータを生成するために使用されてもよい。このプロセスの各反復において、天体暦の変更は、それぞれの直前の反復において得られた補正済み天体暦パラメータの組から繰り返し計算される。反復は、有意な変化が生じなくなるか、または予定された反復回数の限界に達するまで持続する。
【0044】
本発明の例がここでさらに詳しく説明される。本発明の最初の例において、主衛星34の天体暦のみが誤差があるものと仮定される。1機の衛星に対する天体暦(「エポック」と呼ばれる所与の時点における)は、主衛星の直交ECF位置ベクトル要素x、y、zおよび速度ベクトル要素
【数1】
を含む6×1要素列ベクトル[S]として表わされ得る。ここで、
【数2】
の上付きドットは時間に関する微分を示す。初期の主衛星の天体暦推定値または起動時の天体暦は要素
【数3】
を有するベクトル[SS]として表わされ、[A]はこの起動時の天体暦を真の主衛星天体暦のより良い推定値[S]に変換するのに必要な要素a1〜a6を有する補正の列ベクトルであり、[S]は要素
【数4】
を有する場合、
[S]=[SS]−[A] (1)
であり、あるいは、省略せずに書くと、
【数5】
となる。
【0045】
本発明のEEC手法は、天体暦補正ベクトル[A]の要素a1〜a6を決定する(少なくとも初期段階として)。本発明の本実施形態において、TDOAおよびFDOAの測定は、既知の位置の各々で、時間を隔てたN個の測定サンプルで、地理的に分散された複数台の天体暦較正器42で行なわれる。各サンプルは1機の天体暦較正器に関するTDOAおよびFDOAの両方の測定値である。N個のサンプルの収集は、EECの実施に必要な測定キャンペーンとなる。サンプルは一般に(便宜上)多数の測定サイクルで得られ、各サイクルは順番に選ばれた各天体暦較正器42に関する1個のサンプルを含む。したがって、サンプルの総数Nは、天体暦較正器42の台数、図3では4、にサイクル数を乗じて与えられる。
【0046】
本発明は、本実施形態のTDOAおよびFDOAの測定に限定されない。測定値は、種々の天体暦較正器からの同時測定値と、同じかまたは他の天体暦較正器からの時間的隔たりのある測定値との組合せであってもよい。同時測定値は、複数台の天体暦較正器を包含するのに十分な帯域にわたる複数の収集チャネルまたはサンプリングを使って得られてもよい。
【0047】
本実施形態において、すべてのサンプルは、それぞれ別の時間に測定される(これは必須ではないが)。n番目のサンプル(n=1〜N)は時刻tnで測定され、各サンプルに対する関連期待値(TDOA)nおよび(FDOA)nは、主衛星36および副衛星48の初期起動時の天体暦、基準送信機38の位置、主傍受アンテナ36および副傍受アンテナ48、ならびにn番目のサンプルに伴う天体暦較正器42から計算される。この計算は以下のように実行される。衛星の初期起動時の天体暦は公表されている(後で説明されるように)。天体暦は、衛星運動に起因して時とともに変化するが、時間原点t0における初期起動時の天体暦を有しており、天体暦は衛星の軌道ダイナミックスから別の時刻に対して計算され得る。それゆえ、それぞれの組の天体暦パラメータは、主衛星36および副衛星48の各サンプルの測定時刻t1〜tNに対して計算される。これらの計算された天体暦パラメータを使用すると、期待されるTDOA/FDOA値<TDOA>nおよび<FDOA>nが各サンプル時刻tn(n=1〜N)に対して計算される。
【0048】
測定されるTDOA/FDOA値TDOAnおよびFDOAnは、図3に関して記載される測定手法を使ってt1〜tNの各時刻で得られる。1〜Nのすべてのnに対する期待値または計算値<TDOA>nおよび<FDOA>nは、ベクトルとして表わされ、この後、測定値TDOAnおよびFDOAnのベクトルから差し引かれ、次式で与えられる差の列ベクトル[D]を与える。
【数6】
【0049】
ここで、Δはこの直後の丸括弧内の量TDOA1〜TDOANが差分であることを示す。本発明のEEC手法は、[D]ベクトルをすべての要素がゼロに等しい零ベクトルにできる限り近づける、初期の衛星天体暦における要素の変化を計算することを目指すものである。
【0050】
[A]で[SS]を補正することによって測定位置パラメータに厳密に一致する期待位置パラメータを与えるような式(2)の[A]を導出するために、この例の方法は、[SS]の天体暦要素をわずかに変更しTDOAおよびFDOAに対して予測される値への影響を決定するものである。これは、それぞれの天体暦要素
【数7】
の変化
【数8】
を計算して行なわれる。ここで、前述と同様に、上付きドットは時間に関する微分を示す。
【数9】
の導入に伴う<TDOA>nおよび<FDOA>nの期待値の変化は、それぞれ、時刻tn(n=1〜N)における各サンプルに対して計算される。こうして、<TDOA>nのN個の値の各々に対して∂TDOA(tn)/∂k形の6つの変化が与えられ、<FDOA>nのN個の値の各々に対して∂FDOA(tn)/∂k形の6つの変化が与えられる。ここで、kは
【数10】
である。これらの変化は、TDOAおよびFDOAの推定値がTDOAおよびFDOAの測定値への最良適合となる適合プロセスを使って達せられる。これらの変化は、偏微分の2N×6の要素行列[M]のそれぞれに要素として使用される。[M]は、式(3)における差分行列[D]と、式(1)および(2)における所要の天体暦要素変化列ベクトル[A]とに、次式によって関係付けられている。
【数11】
【0051】
あるいは、省略せずに書くと、
【数12】
【0052】
基準送信機38および天体暦較正器42からの通信信号は、電力が異なる。すなわち、各サンプルに対して測定されたTDOAおよびFDOAパラメータの不確定性は、電力依存性を示し、したがって異なることになる。式(5)は、これらの不確定性を表わすために下記のように不確定性の逆数を使って重み付けされる。
【数13】
【0053】
ここで、στnとσνn(n=1〜N)は、n番目のサンプルに対してそれぞれ測定されたTDOAおよびFDOAの値の不確定性である。
【0054】
両辺に[M]−1を左から掛けて式(6)を整理し、積[M]−1[M]を恒等行列に置き換えると、起動時の天体暦の誤差ベクトル[A]は次式で与えられる。
[A]=[M]−1[D] (7)
【0055】
ここで、[M]−1は、Penrose R,1955,Proceedings of the Cambridge Philosophical Society,51,406−413の「A generalized inverse for matrices」に記載された[M]の一意的なムーアペンローズ型一般化逆行列である。式(7)は、誤差ベクトル[A]、天体暦要素の小さい変化、およびTDOA/FDOA推定/測定差分の間の線形関係である。ただし、衛星の天体暦は[M]を配置するために使用される小さい変化とは著しく異なる量の誤差を有する場合があり、式(7)の線形関係はもはや満足なものではないかもしれない。この場合には、天体暦誤差を検出するために反復アプローチが使用されてもよい。[A]についての最初の計算が行なわれて、天体暦の新たな推定値[S]を生成するために式(1)で使用される。この後、この計算は起動時の天体暦として天体暦の新たな推定値[S]を使って反復される。[M]を配置するために使用される変化は、先行する各反復で[S]に対して行なわれる調整によりよく一致するように各反復において自動的に調整される。正常に動作するシナリオの場合、3〜5回の反復後に満足な収束結果が得られている。
【0056】
衛星34および46の両方の天体暦に誤差がある場合、本発明に従って1機の衛星の天体暦誤差補正に頼って両衛星の位置と速度の値を求めることはできない。しかし、本発明に従った1機の衛星の天体暦誤差補正は、多くの状況において、両衛星の天体暦誤差に起因する地理位置情報誤差を抑制する変化を1機の衛星の天体暦にもたらし得ることが分かっている。厳密に言えば、これは、天体暦誤差の補正それ自体とは対照的な地理位置情報誤差を抑制する天体暦補償である。したがって、両衛星に対して補正された天体暦が得られていないにもかかわらず、この手法では衛星干渉を引き起こす地上送信機の大幅に改善された地理位置情報精度が一般的に得られ、このこと自体が重要な成果である。
【0057】
本発明は、以下の3つのシナリオで2機の衛星を使った地理位置情報性能の改善に使用されてもよい。
他の衛星の天体暦が正確な場合の1機の衛星の天体暦補正
他の衛星の天体暦が不正確な場合の1機の衛星の天体暦補正(すなわち、天体暦補償)
2機の衛星の天体暦補正
【0058】
2機の衛星34および46の天体暦を補正するために、これらの誤差が一緒に計算され得るように式(5)を拡張することが可能である。これによって、両衛星の天体暦が決定され得る。2機の衛星の天体暦の誤差に関する式(6)を拡張すると次式が得られる。
【数14】
【0059】
ここで、主衛星34および副衛星46の天体暦要素の小さい変化は、それぞれ
【数15】
およびダッシュ記号付きの同等表現
【数16】
によって示される。同様に、主衛星34および副衛星46の天体暦要素に対して計算される補正は、それぞれ(a1〜a6)および(a1’〜a6’)によって示される。式(5)および(6)に関連して記述されたように重みが式(8)に含まれる場合、次式が得られる。
【数17】
【0060】
式(9)は、前述された同等の1機の衛星の真のダイナミックスよりも2機の衛星34および46の真のダイナミックスを表す傾向が強いが、ここでは決定されるべきパラメータが多いので、較正キャンペーンではより大きい数(N)の天体暦較正器を使ってサンプリングする。
【0061】
ここで図4を参照すると、コンピュータによって実行される前述の手順のフローチャートが示される。60において、反復回数pが規定されて最初は1に設定され、この後、起動時の組の天体暦パラメータ(「起動時の天体暦」)が、あるいは両衛星の天体暦が補正されなければならない場合は2つの起動時の組の天体暦パラメータが、62において起動時の天体暦の維持段階64から読み取られる。便宜上、本実施形態における「起動時の天体暦」という表現は、状況にそれぞれ見合った1組または2組の天体暦パラメータを含むものとみなされるものとする。段階64は、時間原点t0において第1の最新の起動時の天体暦である初期起動時の天体暦を有し、各最新の起動時の天体暦は繰り返し更新され、後述されるように次の最新の起動時の天体暦を時々作る。66において、時刻t0に対する起動時の天体暦は、時刻tnにおけるサンプルn(n=1〜N)に対する各起動時の天体暦に変換され、得られた天体暦はすべてのサンプル(n=1〜N)に対して期待されるTDOA/FDOA値<TDOA>nおよび<FDOA>nを計算する基礎として使用される。この計算は、1機の衛星の天体暦補正事例に対して前述された通りである。68において、時刻tnに対する推定値<TDOA>nおよび<FDOA>nは、図3に関して記載された手法を使って時刻tnにおいて測定される各TDOA/FDOA値から差し引かれる。この後、不確定性の逆数による重み付けが適用されて式(6)の左辺を与える。
【0062】
天体暦要素の反復回数qが70において規定され最初は1に設定される。72において、q番目の天体暦パラメータに対して小さい変化∂paramqが加えられる。ここで、paramqは、1機の衛星の場合
【数18】
であり、2機の衛星の場合
【数19】
およびダッシュ記号付きの同等表現
【数20】
である。これらのパラメータの最初のパラメータ、すなわち、xの場合、q=1で小さい変化は∂xである。この場合、<TDOA>nおよび<FDOA>nへの小さい変化∂paramqの影響が74においてN個のサンプルすべてに対して計算される。すなわち、微分∂<TDOA>n/∂paramqおよび∂<FDOA>n/∂paramqがn=1〜Nのすべてに対して計算される。その目的は、時刻tnにおいて<TDOA>nおよび<FDOA>nを変更してそれぞれTDOAnおよびFDOAnの測定値にできる限り等しくする1組の∂paramqの値を見付けて差分ベクトル[D]をできる限り小さくすることである。この数学的方法は周知であり説明は省略する。すなわち、これは、 ‘Numerical Recipes in C − The Art of Scientific Computing’,1988,Cambridge University Press,W.H.Press,B.P.Flannery,S.A.Teukolsky and W.T.Vetterling,chapter 14,page 528から取られた最小二乗平均適合(たとえば、特異値分解を使用する)である。この適合のためのデータは、TDOAおよびFDOAの測定値と推定値の差分を備えるベクトル[D]に組み入れられる。各サンプリング時刻tnに求められる6つまたは12の天体暦パラメータの偏微分値で与えられるモデルが適合される。TDOAおよびFDOAの測定値と推定値の差分を最小にする(最小二乗の意味で)、最新の起動時の天体暦パラメータの変化の最適な組合せが得られる。
【0063】
次に、式(6)(1機の衛星)または式(9)(2機の衛星)に示されるように微分値に重み付けが適用され、得られる値は行列[M]の第q列を配置するために76において使用される。
【0064】
天体暦要素の反復は、ここでは、(1)が1機の衛星の天体暦の検討を示す場合に、そして(2)が2機の衛星の天体暦の検討を示す場合に78において数えられる。1機の衛星では、[M]は6列を有しqは1から6まで続き、2機の衛星では、[M]は12列を有しqは1から12まで続く。1機の衛星の事例ではq<6であれば、あるいは、2機の衛星の事例ではq<12であれば、シーケンス72〜78はループ80によって反復し、天体暦要素の反復回数qは各反復に対して82において1だけインクリメントされる。q=6(1機の衛星)または12(2機の衛星)であれば、処理は段階84に移動する。
【0065】
84において、重み付き行列[M]のムーアペンローズ型逆行列[M]−1が計算され、式(7)におけるように天体暦補正ベクトル[A]を得るために[D]を掛けて使用される。[A]は起動時の天体暦の維持段階64に移動され、ここで、最新の起動時の天体暦が更新または補正され、これを、式(1)および(2)に従って真の主衛星の天体暦のより優れた推定値に変換する。この後、このより優れた推定値は段階62で読み取られて後続の反復(もしあれば)に使用され得る。86において、起動時の天体暦が収束しているかどうかが試験され、この点についての基準は最新の更新の直前における最新の起動時の天体暦と更新された天体暦とがわずかしか違わないことである。この基準が満たされると、88において処理が終了する。この基準が満たされなければ、第2の終点基準、すなわち、反復回数pが事前に決められた制限pmaxに等しい第2の終点基準がある。これらの基準がいずれも満たされなければ、反復がループ92によって持続し、94において反復回数が1だけインクリメントされ、処理が読取り開始天体暦段階62に戻る。62において、起動時の天体暦の最近の更新版、すなわち、補正版が64から読み取られ、段階66以降が反復される。代替基準は、TDOAおよびFDOAにおける残留誤差が許容レベル、たとえば、測定誤差以下に低下していることである。
【0066】
地理位置情報精度に関する本発明の有効性を検討するために、シミュレーションが行なわれた。多数のサイクルの天体暦較正器データ(TDOAおよびFDOAパラメータ)がシミュレーションのための「真の」天体暦として規定されている衛星天体暦を使ってシミュレーションされた。前述のように、1サイクルのデータは、天体暦較正器42の各々に対する(シミュレーション済みまたは実際の)各TDOA測定値および各FDOA測定値を順番に指す。シミュレーションされた測定値は、現実的なガウス誤差を含んでいた。この後、規定された真の天体暦から誤差のある初期起動時の天体暦は、衛星の軌道ダイナミックスの先験的な推定値として使用された。図5は、象徴として描かれたシミュレーション用の地理的な送信機位置を示す欧州、北アフリカ、および中東の地図である。この図は、ノルウェーのオスロ、南ロシアのUrozhaynoyeに近い場所、イスラエルのレボット、およびポルトガルのリスボンにおける4台の天体暦較正器(EphemCal 1〜4)、トルコのブルサにおける基準送信機(基準)、オーストリアのウエルグル近くの対象送信機(対象)、ならびに英国のデフォードにおける2つの傍受アンテナ(図示せず)を有する監視局(モニタ)を示す。
【0067】
較正キャンペーンは、図5に示される4台の天体暦較正器からのサンプルをシミュレーションすることからなるものであった。1分間隔の各起動時刻を有する3つの測定サイクルがシミュレーションされた。シミュレーションのために、異なる複数の測定時刻に対して天体暦を計算してもつじつまが合わないので、所与のサイクル内の各測定は、便宜上、同じ時刻に行なわれるものと仮定された。この後、主衛星天体暦を補正するために、初期起動時の天体暦の誤差は前述された本発明の1衛星EEC手法を使って補正された。
【0068】
また、本発明の地理位置情報精度への影響を評価するために、規定された真の天体暦に基づいて、図5に示された位置における対象からのサンプル送信のTDOAおよびFDOAがシミュレーションされた。対象送信機のこのサンプルは、較正キャンペーンが終了した1分後に採取されているものとしてシミュレーションされた。2つの地上位置の推定は、対象位置、初期起動時の衛星天体暦を使って導出される一方の位置、および補正された主天体暦(および初期起動時の副天体暦)に基づく他方の位置について行なわれた。これらの位置の推定値が図6に示される。
【0069】
第1の位置の楕円100は、初期起動時の衛星天体暦から計算されたもので、長さが約990kmで95%の信頼性レベルを表わし、すなわち、対象がその内部にある確率は95%である。位置の楕円100の計算は天体暦誤差を考慮している。第2の位置の楕円102は、補正済みの天体暦を使って計算されたもので、TDOA/FDOA測定誤差のみを残してほとんどすべての天体暦誤差が排除されているので長さがわずか25km(約40倍の改善)である。また、第1の楕円100は決して最悪の場合でないことに留意することが重要である。初期起動時の衛星天体暦は、地球表面位置の楕円が存在しないような非常に大きい誤差となり得る。このような場合、本発明によって得られる地理位置情報精度の利益は図6で示されるものよりも明らかに大きいが、これらの利益は比較楕円なしには定量化されえない。
【0070】
位置の楕円100および102は、天体暦誤差とTDOAおよびFDOA測定誤差とに起因するTDOAおよびFDOA誤差から計算されて二乗和平方根によってこれら2つを結合してもよい。本発明のこの例において、位置の楕円は総合誤差に基づく95%の信頼限界を示す境界である。
【0071】
本発明の他の実施形態において、2機の衛星の天体暦が同時に計算される。図7はこの実施形態に使用される衛星地上局を示すもので、モニタ、基準送信機、対象送信機、および天体暦較正器EphemCal 1〜4が図5に関して前述されたように設置された。2機の衛星の天体暦が必要とされたので、新たに6台の天体暦較正器EphemCal 5〜EphemCal10が下記の表1に示された位置に採用された。5台の天体暦較正器EphemCal 1〜5は図3の主衛星34に向けられ、他の5台のEphemCal 6〜10は副衛星46に向けられた(しかし、どの衛星が主でどの衛星が副に指定されるかは重要でない)。
【表1】
【0072】
シミュレーションは、5分間隔の各起動時刻を有する72サイクル(すなわち、6時間に及ぶ)について行なわれた。この後、初期起動時の天体暦の誤差が図4に関して前述された2衛星EEC手法を使って補正され、真の天体暦が推定された。
【0073】
12個の未知数(2×6の天体暦要素)を有する数理問題を解くためには、理論上、少なくとも12個の測定値、たとえば、6個のFDOA測定値と6個のTDOA測定値が必要とされるはずである。これらの測定は、N個の空間的に分離されたEphemCalと、(12−N)個の時間的に分離された測定値を使って行なわれてもよく、ここで、Nは1〜12の範囲の任意の整数である。すなわち、空間的および時間的に分離された測定値が、いずれか一方の測定値すべてを含み他方の測定値を全く含まない場合を含めて、任意の組合せで使用されてもよい。しかしながら、結果は、初期または起動時の天体暦のシナリオ、ノイズ、および信頼性によって影響される。ここで、「シナリオ」は、衛星の位置および速度、関連のある送信機および受信機の地理的な位置、ならびに図1に関して説明された手法で主衛星および副衛星によって受信される各信号レプリカ間の相関関係の程度を意味する。それゆえ、実際の状況においては、より多くの測定値、たとえば、4台または5台のEphemCalの複数サイクルが必要とされる場合があり、さらに、より多くのサイクルを使うと、結果が制約されてゆるぎないものとなる。
【0074】
ここで図8を参照すると、a)初期起動時の天体暦(すなわち、先験または事前補正)、b)真の衛星天体暦、およびc)本発明に従って初期起動時の天体暦から計算された天体暦から導出される主衛星に対する衛星地上航跡(4日にわたって伝播された)110a、110b(破線)および110c(実線)が示される。地上航跡は、ある期間にわたる衛星真下の地球表面上の一連の点である。(真の)航跡110bと(計算された)航跡110cはほぼ一致しており、本発明に従って補正された天体暦が真の衛星天体暦の優れた推定値を与えることを示している。これらの真の航跡と計算された航跡は、2つの場合にほとんど同じ衛星の軌道ダイナミックスであるため解明が困難である。航跡110aに対する初期起動時(先験的な)の衛星天体暦は、衛星の軌道ダイナミックスに関して得られるデータのみが公称経度であり、かつ軌道は(ほぼ)地球から見て静止しているという事実から最悪の場合のシナリオであると考えられる。これらのデータは、指定された時刻における直交ECF天体暦の計算に使用される。少なくともこの基本情報が有効でないとは考えにくく、かなり正確な起動時の天体暦が北米航空宇宙防衛司令部(NORAD)の総合ウェブサイトリスト(たとえば、www.celestrak.com参照)に掲載されており、このリストは「2行軌道要素」と呼ばれるタイプの天体暦を提供している。
【0075】
ここで図9を参照すると、この図は、副衛星に適用されることを除いて図8と同等である。この図は、a)初期起動時(すなわち、先験または事前補正)天体暦、b)真の衛星天体暦、およびc)本発明に従って計算された天体暦から導出される衛星の地上航跡120a、120b(鎖線)、および120c(実線)を示す。ここでも、(真の)航跡120bと(計算された)航跡120cはほぼ一致しており、計算された天体暦が真の衛星天体暦の優れた推定値であることを示している。
【0076】
下記の表2は、初期起動時の(先験的な)天体暦要素、本発明に従って計算された天体暦要素、および真の天体暦要素を一覧表で示す。さらに示されているのは、データがシミュレーションされて計算された天体暦要素と真の天体暦要素の絶対差である。天体暦要素xにおいて、その差は100万分の1よりも小さい。本発明に従って計算された天体暦要素は、どの1つの位置座標においても200m以下の誤差があり、位置座標の結果に230m rms以下の誤差がある。さらに、速度誤差はわずか0.04m/sであり、これらの誤差は、地球表面の上方約35,800km(地球中心から静止軌道まで42,164km)の軌道高度にある衛星に関するものであった。衛星速度は最大3m/s(ECF座標系において。ECI座標系においては最大3km/s)であった。真の天体暦と計算された天体暦との差分位置ベクトルは、天体暦が伝播された24時間にわたって主衛星と副衛星の両方に対して600mを超えることはなく、その後の48時間にわたって900m以下のままの大きさを有した。これらの値は、多くの測定キャンペーンに対して得られた値の典型であった。
【表2】
【0077】
本発明のEEC手法において、EphemCal局の物理的数よりもEphemCal測定値の数の方が重要である。EECは、EphemCal局を1つだけ使って、たとえば、6時間の間10分ごとにサンプリングを行ない、36のTDOAおよびFDOA測定値を提供することができる。これは、理想的でないにしても、十分に良好な測定環境において有効な天体暦パラメータの結果を提供し得る。複数のEphemCal局を使うと、1つのこのような局を使用する場合に比べて結果が改善される可能性がある。さらに、非常に精度の高い初期天体暦または起動時の天体暦が使用されると、本発明のEEC手法は収束しない可能性や不正な解に収束する可能性が低くなる。不正な解は、期待誤差の範囲外にあるTDOAおよび/またはFDOAの残差を得ることによって示されてもよい。さらに、非常に精度の高い起動時の天体暦の場合、ほんのわずかな測定値があれば収束し、この逆もまた真である。先に述べたように、前述の本発明の各例において、各EphemCal測定値は2つの測定量TDOAおよびFDOAを提供し、その結果、天体暦の6つまたは12の未知数を解くためには、それぞれ、少なくとも3つまたは6つのEphemCal測定値を必要とし、すなわち、結合される測定量の数は少なくとも未知数の数に等しくなければならない。しかし、実際には、これは不利な測定条件において十分でないかもしれない。さらに、1分間隔で採取される1台のEphemCalの3つの測定値は、地理的に離れている3台の異なるEphemCalから3つの測定値を採取する場合、またははるかに大きい測定間隔、たとえば2時間で、1台のEphemCalから3つの測定値を採取する場合よりも有効性がはるかに低くなる可能性がある。EphemCal測定値が空間次元と時間次元の少なくとも一方において十分に離れていれば、結果は改善する傾向がある。経験によれば、地理的に十分に離れた4つ以上のEphemCal局を使うと妥当な結果が短時間で実現する可能性があるが、4つが最小限度ではない。
【0078】
本発明のシミュレーションは、TDOAおよびFDOAを組み合わせて行なわれている。結果は以下のように得られた。
a)天体暦誤差の補償(すなわち、1機の衛星の補正):各測定の組が5分隔てられた2台の天体暦較正器で72の測定組(すなわち、合計6時間)のTDOAおよびFDOAが、10−7sのTDOA測定誤差と10−3HzのFDOA測定誤差に対して56mのrms位置誤差と4×10−3m/sのrms速度誤差を提供する。
b)天体暦誤差補正(すなわち、2機の衛星の補正):各測定の組が10分隔てられた4台の天体暦較正器で72の測定の組(すなわち、合計12時間)のTDOAおよびFDOAが、10−7sのTDOA測定誤差と10−3HzのFDOA測定誤差に対して約700mのrms位置誤差と約0.50m/sのrms速度誤差を提供する。
【0079】
また、本発明のシミュレーションは、1種類の測定データのみ、すなわち、TDOAデータまたはFDOAデータの両方でなくいずれか一方を使って1機の衛星の補償および2機の衛星の補正に対して行なわれた。目的は、これら2つの代替的アプローチの実行可能性を判断することであった。TDOAデータのみまたはFDOAデータのみを使ったこれらの補償および補正機能の性能は、いくつかの要因、データの正確さ、較正器またはEphemCal局の数、およびシナリオに加えて測定値の数に依存する。
【0080】
1機の衛星の補償シミュレーションが、「TDOAのみ」のデータおよび「FDOAのみ」のデータを使って行なわれ、結果が下記の表3Aおよび3Bにそれぞれ示されている。この表および後続の表において、「N_Sites」は較正器またはEphemCal局の数を意味し、「Inc_min」は一連の測定間の分数を意味し、「N_count」は測定値数を意味し、「収束なし」は補償の実行が可能でなかったことを意味する。
【表3A】
【表3B】
【0081】
表3Aおよび3Bのデータは、左欄に示されるように1〜10台の較正器(N_Site=1〜10)を使って得られた。これらのデータは、1種類の測定値(すなわち、TDOA、FDOAの一方であって両方ではない)が1機の衛星の補償に使用され得ることを示した。誤差は「現実的な」値、すなわち、現在の実務において遭遇する誤差値といえるものである。
【0082】
2機の衛星の補正シミュレーションは、非常に精度の高い「TDOAのみの」データを使って行なわれており、結果が下記の表4に示される。
【表4】
【0083】
表4は、非常に精度の高いTDOAのみの測定値(誤差=10−12s)を使っても1台または2台の較正器しか使用されない場合はrms(二乗平均平方根)位置誤差が大きいことを示す。したがって、3台および好ましくは4台の較正器が望ましい。3台の較正器が使用された場合でも、位置誤差が大きいことがあるが、速度誤差は許容されることがある。4台の較正器が使用される場合、位置誤差および速度誤差は3台の較正器の同等の誤差と比べて2桁以上小さくなる。5番目の較正器を追加してもほとんど相違がない。
【0084】
2機の衛星の補正シミュレーションは、現実的な精度の「TDOAのみの」データ(誤差=10−7s)を使って行なわれており、結果が下記の表5に示される。
【表5】
【0085】
表5のシミュレーションデータは、10台の較正器を用いて現実的な精度のTDOAのみの測定値を使って得られたもので、大きい位置誤差と速度誤差を示している。したがって、使用したい較正器の数が10台程度であるとすれば、表5は適正範囲内での誤差の補正が現実的な精度のTDOAのみの測定値を使って得られなかったことを示している。
【0086】
2機の衛星の補正シミュレーションは、非常に精度の高い「FDOAのみの」データを使って行なわれており、結果が下記の表6に示される。
【表6】
【0087】
表6は、非常に精度の高いFDOAのみの測定値とともに、4台以上の較正器を使って適度に小さい誤差を有する天体暦補正が得られたことを示す。
【0088】
2機の補正シミュレーションは、現実的な精度の「FDOAのみの」データを使って行なわれており、結果が下記の表7に示される。
【表7】
【0089】
表7は、現実的な精度のFDOAのみの測定値とともに、10台以上の較正器を使って適度に小さい誤差を有する天体暦補正が得られたことを示す。
【0090】
表3から表7のデータは、測定精度と較正器の台数が十分であるとの条件で、前述のTDOAおよびFDOAの両方の代りに、TDOAまたはFDOA測定値のみを使って衛星の天体暦誤差を補正または補償する現在利用可能な技術があれば実現可能であることを示す。
【0091】
前述の各式は、適切なキャリア媒体に記録され従来のコンピュータシステムで起動しているプログラムコード命令を備える適切なコンピュータソフトウェアによって明確に評価され得る。キャリア媒体は、メモリ、磁気テープ、フロッピー(登録商標)またはコンパクトまたは光ディスク、あるいはその他のハードウェア記録媒体などの市販品であってもよく、あるいは、これは電気信号や光信号であってもよい。このようなソフトウェアは、よく知られている計算手順を含むので、熟練したプログラマにとっては発明を必要とせずに前述の説明から実行することが容易である。
【図面の簡単な説明】
【0092】
【図1】先行技術の地理位置情報システムを示す。
【図2a】衛星の天体暦パラメータを規定するために使用されるケプラー座標系を示す。
【図2b】衛星の天体暦パラメータを規定するために使用される直交座標系を示す。
【図2c】衛星の天体暦パラメータを規定するために使用される直交座標系を示す。
【図3】本発明の地理位置情報システムを図式的に示す。
【図4】一連の組の補正済み天体暦パラメータがこのような組をさらに生成するために使用される本発明の反復法における各ステップのフローチャートを示す。
【図5】図3のシステムで使用されるモニタ、基準送信機、および較正送信機の位置の例を示す。
【図6】1機の衛星の天体暦における誤差を補償する本発明のシミュレーションで生成される地理位置情報の改善を示す。
【図7】2機の衛星の天体暦における誤差の補償に使用されるモニタ、基準送信機、および較正送信機の位置の例を示す。
【図8】図3の主衛星に関して、a)初期起動時の天体暦、b)真の衛星天体暦、およびc)本発明に従って計算された天体暦から導出された衛星の地上航跡を示す。
【図9】副衛星に適用されることを除いて図8と同じである。
【特許請求の範囲】
【請求項1】
衛星の天体暦誤差を補償または補正する方法であって、
a)既知の位置の較正送信手段から様々な衛星を介して受信される信号レプリカに伴う時間差および周波数差の少なくとも一方を決定するステップと、
b)衛星の天体暦要素に対応する推定値を得て、前記推定値の変化を計算し、対応する測定済みの時間差および/または周波数差とよりよく一致する時間差および周波数差の推定値の少なくとも一方を生じさせるステップと
を備える、方法。
【請求項2】
前記ステップa)が前記信号レプリカに伴う時間差および周波数差の両方を決定するステップを備える、請求項1に記載の方法。
【請求項3】
天体暦誤差を補償する方法であって、前記較正送信手段が少なくとも2台の較正送信機を備える、請求項1に記載の方法。
【請求項4】
衛星の天体暦誤差を補正する方法であって、前記少なくとも2台の較正送信機が少なくとも4台の較正送信機である、請求項3に記載の方法。
【請求項5】
前記ステップb)が、類似した後続の推定値を得るように、衛星の天体暦要素に対応する推定値を繰り返し使うステップを含む、請求項1に記載の方法。
【請求項6】
積[M]−1[D]から天体暦補正ベクトル[A]を計算するステップを含み、[D]が1組の測定/推定時刻に関する時間差および周波数差の測定値と推定値との差分である要素を有するベクトルであり、[M]−1が、前記1組の測定/推定時刻に関する推定衛星天体暦要素の変化である要素を有する行列[M]の逆行列であり、前記変化が、該変化前の推定衛星天体暦要素に伴う[D]の値に比べて[D]の大きさが縮小されることをもたらす、請求項1に記載の方法。
【請求項7】
[M]の要素が最小二乗平均適合によって得られる、請求項6に記載の方法。
【請求項8】
前記最小二乗平均適合が特異値分解に基づく、請求項7に記載の方法。
【請求項9】
[D]および[M]の要素が、必要に応じて、時間差および周波数差における測定誤差に伴う逆数に比例して重み付けされる、請求項7に記載の方法。
【請求項10】
1機の主衛星の天体暦誤差を補償する方法であって、前記較正送信手段が少なくとも2台の較正送信機を備える、請求項1に記載の方法。
【請求項11】
1機の衛星の天体暦誤差を補償する方法であって、前記少なくとも2台の較正送信機が少なくとも4台の較正送信機である、請求項10に記載の方法。
【請求項12】
衛星干渉を引き起こす送信機を特定する過程で2機の衛星の天体暦誤差を補償する方法であって、1機の衛星の天体暦に対して天体暦補償が決定されて適用される、請求項1に記載の方法。
【請求項13】
主衛星および副衛星の両方に対して天体暦誤差を補償する方法であって、前記較正送信手段が少なくとも10台の較正送信機を備える、請求項1に記載の方法。
【請求項14】
衛星天体暦誤差を補償または補正する装置であって、
a)既知の位置の較正送信手段から様々な衛星を介して受信される信号レプリカに伴う時間差および周波数差の少なくとも一方を決定する手段と、
b)衛星の天体暦要素に対応する推定値を得て、かかる前記推定値の変化を計算し、対応する測定済みの時間差および/または周波数差とよりよく一致する時間差および周波数差の推定値の少なくとも一方を生じさせる手段と
を有する、装置。
【請求項15】
時間差および周波数差の少なくとも一方を決定する前記手段が、前記信号レプリカに伴う時間差および周波数差の両方を決定するように構成される、請求項14に記載の装置。
【請求項16】
天体暦誤差を補償する装置であって、前記較正送信手段が少なくとも2台の較正送信機を備える、請求項14に記載の装置。
【請求項17】
衛星の天体暦誤差を補正する装置であって、前記少なくとも2台の較正送信機が少なくとも4台の較正送信機である、請求項16に記載の装置。
【請求項18】
衛星の天体暦要素に対応する推定値を得る前記手段が、類似した後続の推定値を得るように、衛星の天体暦要素に対応する推定値を繰り返し使用するように構成される、請求項14に記載の装置。
【請求項19】
衛星の天体暦要素に対応する推定値を得る前記手段が積[M]−1[D]から天体暦補正ベクトル[A]を計算するように構成され、ここで、[D]が1組の測定/推定時刻に関する時間差および周波数差の測定値および推定値の差である要素を有するベクトルであり、[M]−1が前記1組の測定/推定時刻に関する推定衛星天体暦要素の変化である要素を有する行列[M]の逆行列であり、前記変化が該変化前の推定衛星天体暦要素に伴う[D]の値に比べて[D]の大きさが縮小されることをもたらす、請求項14に記載の装置。
【請求項20】
衛星の天体暦要素に対応する推定値を得る前記手段が、最小二乗平均適合によって[M]の要素を得るように構成される、請求項19に記載の装置。
【請求項21】
前記最小二乗平均適合が特異値分解に基づく、請求項20に記載の装置。
【請求項22】
衛星の天体暦要素に対応する推定値を得る前記手段が、必要に応じて、時間差および周波数差における測定誤差に伴う逆数に比例して[D]および[M]の要素に重み付けをするように構成される、請求項20に記載の装置。
【請求項23】
1機の主衛星の天体暦誤差を補償する装置であって、前記較正送信手段が少なくとも2台の較正送信機を備える、請求項14に記載の装置。
【請求項24】
1機の衛星の天体暦誤差を補償する装置であって、前記少なくとも2台の較正送信機が少なくとも4台の較正送信機である、請求項23に記載の装置。
【請求項25】
衛星干渉を引き起こす送信機を特定する過程で2機の衛星の天体暦誤差を補償する装置であって、衛星の天体暦要素に対応する推定値を得る前記手段が天体暦の補償を決定してこれを1機の衛星の天体暦に適用するように構成される、請求項14に記載の装置。
【請求項26】
主衛星および副衛星の両方に対して天体暦誤差を補償する装置であって、前記較正送信手段が少なくとも10台の較正送信機を備える、請求項14に記載の装置。
【請求項27】
衛星の天体暦誤差の補償または補正に使用されるコンピュータソフトウェアであって、
a)既知の位置の較正送信手段から種々の衛星を介して受信される信号レプリカに伴う時間差および周波数差の少なくとも一方を決定するステップと、
b)衛星の天体暦要素に対応する推定値を得て、前記推定値の変化を計算し、対応する測定済みの時間差および/または周波数差とよりよく一致する時間差および周波数差の推定値の少なくとも一方を生じさせるステップと
を実行するためのコンピュータ装置を制御する適切なキャリア媒体に記録されるプログラムコード命令を備える、コンピュータソフトウェア。
【請求項28】
前記ステップa)が、前記信号レプリカに伴う時間差および周波数差の両方を決定するステップを備える、請求項27に記載のコンピュータソフトウェア。
【請求項29】
天体暦誤差の補償に使用されるコンピュータソフトウェアであって、前記較正送信手段が少なくとも2台の較正送信機を備える、請求項27に記載のコンピュータソフトウェア。
【請求項30】
衛星の天体暦誤差の補正に使用されるコンピュータソフトウェアであって、前記少なくとも2台の較正送信機が少なくとも4台の較正送信機である、請求項29に記載のコンピュータソフトウェア。
【請求項31】
前記ステップb)が、類似した後続の推定値を得るように衛星の天体暦要素に対応する推定値を繰り返し使用するステップを含む、請求項27に記載のコンピュータソフトウェア。
【請求項32】
積[M]−1[D]から天体暦補正ベクトル[A]を計算するステップもさらに実行するように、コンピュータ装置を制御するコンピュータソフトウェアであって、[D]が1組の測定/推定時刻に関する時間差および周波数差の測定値および推定値の差である要素を有するベクトルであり、[M]−1が前記1組の測定/推定時刻に関する推定衛星天体暦要素の変化である要素を有する行列[M]の逆行列であり、前記変化が、該変化前の推定衛星天体暦要素に伴う[D]の値に比べて[D]の大きさが縮小されることをもたらす、請求項27に記載のコンピュータソフトウェア。
【請求項33】
[M]の要素を最小二乗平均適合によって得るための命令を有する、請求項32に記載のコンピュータソフトウェア。
【請求項34】
特異値分解に基づいて最小二乗平均適合を得るための命令を有する、請求項33に記載のコンピュータソフトウェア。
【請求項35】
必要に応じて、時間差および周波数差における測定誤差に伴う逆数に比例して[D]および[M]の要素を重み付けする命令を有する、請求項33に記載のコンピュータソフトウェア。
【請求項36】
1機の衛星の天体暦誤差の補償に使用されるコンピュータソフトウェアであって、前記較正送信手段が少なくとも2台の較正送信機を備える、請求項27に記載のコンピュータソフトウェア。
【請求項37】
1機の主衛星の天体暦誤差の補償に使用されるコンピュータソフトウェアであって、前記少なくとも2台の較正送信機が少なくとも4台の較正送信機である、請求項36に記載のコンピュータソフトウェア。
【請求項38】
衛星干渉を引き起こす送信機を特定する過程で2機の衛星の天体暦誤差の補償に使用されるコンピュータソフトウェアであって、前記ソフトウェアが天体暦補償を決定してこれを1機の衛星の天体暦に適用する命令を有する、請求項27に記載のコンピュータソフトウェア。
【請求項39】
主衛星および副衛星の両方に対して天体暦誤差の補償に使用されるコンピュータソフトウェアであって、前記較正送信手段が少なくとも10台の較正送信機を備える、請求項27に記載のコンピュータソフトウェア。
【請求項1】
衛星の天体暦誤差を補償または補正する方法であって、
a)既知の位置の較正送信手段から様々な衛星を介して受信される信号レプリカに伴う時間差および周波数差の少なくとも一方を決定するステップと、
b)衛星の天体暦要素に対応する推定値を得て、前記推定値の変化を計算し、対応する測定済みの時間差および/または周波数差とよりよく一致する時間差および周波数差の推定値の少なくとも一方を生じさせるステップと
を備える、方法。
【請求項2】
前記ステップa)が前記信号レプリカに伴う時間差および周波数差の両方を決定するステップを備える、請求項1に記載の方法。
【請求項3】
天体暦誤差を補償する方法であって、前記較正送信手段が少なくとも2台の較正送信機を備える、請求項1に記載の方法。
【請求項4】
衛星の天体暦誤差を補正する方法であって、前記少なくとも2台の較正送信機が少なくとも4台の較正送信機である、請求項3に記載の方法。
【請求項5】
前記ステップb)が、類似した後続の推定値を得るように、衛星の天体暦要素に対応する推定値を繰り返し使うステップを含む、請求項1に記載の方法。
【請求項6】
積[M]−1[D]から天体暦補正ベクトル[A]を計算するステップを含み、[D]が1組の測定/推定時刻に関する時間差および周波数差の測定値と推定値との差分である要素を有するベクトルであり、[M]−1が、前記1組の測定/推定時刻に関する推定衛星天体暦要素の変化である要素を有する行列[M]の逆行列であり、前記変化が、該変化前の推定衛星天体暦要素に伴う[D]の値に比べて[D]の大きさが縮小されることをもたらす、請求項1に記載の方法。
【請求項7】
[M]の要素が最小二乗平均適合によって得られる、請求項6に記載の方法。
【請求項8】
前記最小二乗平均適合が特異値分解に基づく、請求項7に記載の方法。
【請求項9】
[D]および[M]の要素が、必要に応じて、時間差および周波数差における測定誤差に伴う逆数に比例して重み付けされる、請求項7に記載の方法。
【請求項10】
1機の主衛星の天体暦誤差を補償する方法であって、前記較正送信手段が少なくとも2台の較正送信機を備える、請求項1に記載の方法。
【請求項11】
1機の衛星の天体暦誤差を補償する方法であって、前記少なくとも2台の較正送信機が少なくとも4台の較正送信機である、請求項10に記載の方法。
【請求項12】
衛星干渉を引き起こす送信機を特定する過程で2機の衛星の天体暦誤差を補償する方法であって、1機の衛星の天体暦に対して天体暦補償が決定されて適用される、請求項1に記載の方法。
【請求項13】
主衛星および副衛星の両方に対して天体暦誤差を補償する方法であって、前記較正送信手段が少なくとも10台の較正送信機を備える、請求項1に記載の方法。
【請求項14】
衛星天体暦誤差を補償または補正する装置であって、
a)既知の位置の較正送信手段から様々な衛星を介して受信される信号レプリカに伴う時間差および周波数差の少なくとも一方を決定する手段と、
b)衛星の天体暦要素に対応する推定値を得て、かかる前記推定値の変化を計算し、対応する測定済みの時間差および/または周波数差とよりよく一致する時間差および周波数差の推定値の少なくとも一方を生じさせる手段と
を有する、装置。
【請求項15】
時間差および周波数差の少なくとも一方を決定する前記手段が、前記信号レプリカに伴う時間差および周波数差の両方を決定するように構成される、請求項14に記載の装置。
【請求項16】
天体暦誤差を補償する装置であって、前記較正送信手段が少なくとも2台の較正送信機を備える、請求項14に記載の装置。
【請求項17】
衛星の天体暦誤差を補正する装置であって、前記少なくとも2台の較正送信機が少なくとも4台の較正送信機である、請求項16に記載の装置。
【請求項18】
衛星の天体暦要素に対応する推定値を得る前記手段が、類似した後続の推定値を得るように、衛星の天体暦要素に対応する推定値を繰り返し使用するように構成される、請求項14に記載の装置。
【請求項19】
衛星の天体暦要素に対応する推定値を得る前記手段が積[M]−1[D]から天体暦補正ベクトル[A]を計算するように構成され、ここで、[D]が1組の測定/推定時刻に関する時間差および周波数差の測定値および推定値の差である要素を有するベクトルであり、[M]−1が前記1組の測定/推定時刻に関する推定衛星天体暦要素の変化である要素を有する行列[M]の逆行列であり、前記変化が該変化前の推定衛星天体暦要素に伴う[D]の値に比べて[D]の大きさが縮小されることをもたらす、請求項14に記載の装置。
【請求項20】
衛星の天体暦要素に対応する推定値を得る前記手段が、最小二乗平均適合によって[M]の要素を得るように構成される、請求項19に記載の装置。
【請求項21】
前記最小二乗平均適合が特異値分解に基づく、請求項20に記載の装置。
【請求項22】
衛星の天体暦要素に対応する推定値を得る前記手段が、必要に応じて、時間差および周波数差における測定誤差に伴う逆数に比例して[D]および[M]の要素に重み付けをするように構成される、請求項20に記載の装置。
【請求項23】
1機の主衛星の天体暦誤差を補償する装置であって、前記較正送信手段が少なくとも2台の較正送信機を備える、請求項14に記載の装置。
【請求項24】
1機の衛星の天体暦誤差を補償する装置であって、前記少なくとも2台の較正送信機が少なくとも4台の較正送信機である、請求項23に記載の装置。
【請求項25】
衛星干渉を引き起こす送信機を特定する過程で2機の衛星の天体暦誤差を補償する装置であって、衛星の天体暦要素に対応する推定値を得る前記手段が天体暦の補償を決定してこれを1機の衛星の天体暦に適用するように構成される、請求項14に記載の装置。
【請求項26】
主衛星および副衛星の両方に対して天体暦誤差を補償する装置であって、前記較正送信手段が少なくとも10台の較正送信機を備える、請求項14に記載の装置。
【請求項27】
衛星の天体暦誤差の補償または補正に使用されるコンピュータソフトウェアであって、
a)既知の位置の較正送信手段から種々の衛星を介して受信される信号レプリカに伴う時間差および周波数差の少なくとも一方を決定するステップと、
b)衛星の天体暦要素に対応する推定値を得て、前記推定値の変化を計算し、対応する測定済みの時間差および/または周波数差とよりよく一致する時間差および周波数差の推定値の少なくとも一方を生じさせるステップと
を実行するためのコンピュータ装置を制御する適切なキャリア媒体に記録されるプログラムコード命令を備える、コンピュータソフトウェア。
【請求項28】
前記ステップa)が、前記信号レプリカに伴う時間差および周波数差の両方を決定するステップを備える、請求項27に記載のコンピュータソフトウェア。
【請求項29】
天体暦誤差の補償に使用されるコンピュータソフトウェアであって、前記較正送信手段が少なくとも2台の較正送信機を備える、請求項27に記載のコンピュータソフトウェア。
【請求項30】
衛星の天体暦誤差の補正に使用されるコンピュータソフトウェアであって、前記少なくとも2台の較正送信機が少なくとも4台の較正送信機である、請求項29に記載のコンピュータソフトウェア。
【請求項31】
前記ステップb)が、類似した後続の推定値を得るように衛星の天体暦要素に対応する推定値を繰り返し使用するステップを含む、請求項27に記載のコンピュータソフトウェア。
【請求項32】
積[M]−1[D]から天体暦補正ベクトル[A]を計算するステップもさらに実行するように、コンピュータ装置を制御するコンピュータソフトウェアであって、[D]が1組の測定/推定時刻に関する時間差および周波数差の測定値および推定値の差である要素を有するベクトルであり、[M]−1が前記1組の測定/推定時刻に関する推定衛星天体暦要素の変化である要素を有する行列[M]の逆行列であり、前記変化が、該変化前の推定衛星天体暦要素に伴う[D]の値に比べて[D]の大きさが縮小されることをもたらす、請求項27に記載のコンピュータソフトウェア。
【請求項33】
[M]の要素を最小二乗平均適合によって得るための命令を有する、請求項32に記載のコンピュータソフトウェア。
【請求項34】
特異値分解に基づいて最小二乗平均適合を得るための命令を有する、請求項33に記載のコンピュータソフトウェア。
【請求項35】
必要に応じて、時間差および周波数差における測定誤差に伴う逆数に比例して[D]および[M]の要素を重み付けする命令を有する、請求項33に記載のコンピュータソフトウェア。
【請求項36】
1機の衛星の天体暦誤差の補償に使用されるコンピュータソフトウェアであって、前記較正送信手段が少なくとも2台の較正送信機を備える、請求項27に記載のコンピュータソフトウェア。
【請求項37】
1機の主衛星の天体暦誤差の補償に使用されるコンピュータソフトウェアであって、前記少なくとも2台の較正送信機が少なくとも4台の較正送信機である、請求項36に記載のコンピュータソフトウェア。
【請求項38】
衛星干渉を引き起こす送信機を特定する過程で2機の衛星の天体暦誤差の補償に使用されるコンピュータソフトウェアであって、前記ソフトウェアが天体暦補償を決定してこれを1機の衛星の天体暦に適用する命令を有する、請求項27に記載のコンピュータソフトウェア。
【請求項39】
主衛星および副衛星の両方に対して天体暦誤差の補償に使用されるコンピュータソフトウェアであって、前記較正送信手段が少なくとも10台の較正送信機を備える、請求項27に記載のコンピュータソフトウェア。
【図1】

【図2a】
【図2b】
【図2c】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図2a】
【図2b】
【図2c】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公表番号】特表2009−531693(P2009−531693A)
【公表日】平成21年9月3日(2009.9.3)
【国際特許分類】
【出願番号】特願2009−502188(P2009−502188)
【出願日】平成19年3月22日(2007.3.22)
【国際出願番号】PCT/GB2007/001039
【国際公開番号】WO2007/113475
【国際公開日】平成19年10月11日(2007.10.11)
【出願人】(501352882)キネテイツク・リミテツド (93)
【Fターム(参考)】
【公表日】平成21年9月3日(2009.9.3)
【国際特許分類】
【出願日】平成19年3月22日(2007.3.22)
【国際出願番号】PCT/GB2007/001039
【国際公開番号】WO2007/113475
【国際公開日】平成19年10月11日(2007.10.11)
【出願人】(501352882)キネテイツク・リミテツド (93)
【Fターム(参考)】
[ Back to top ]