
衛星の質量を最適化する方法および装置
【課題】 衛星の質量を最適化する方法および装置を提供する。
【解決手段】 本発明は、衛星の質量を最適化する方法および装置に関する。方法は、近点(104)および遠点(105)を結ぶ軸(106)を中心として第1の軌道(103)を回転させることにより得られる第2の楕円軌道(107)を計算するステップ(201)であって、第2の楕円軌道(107)には、第1の最長食継続時間(D1)未満の第2の最長食継続時間(D2)が関連付けられる、ステップ(201)と、衛星を第2の軌道(107)に移動できるようにする操作を決定するステップ(202)と、第2の最長食継続時間(D2)中に衛星の動作を維持できるようにする第2の電池質量(Mb2)を計算し、操作を行うために必要な燃料の質量(Mc)を計算するステップ(203)とを含む。
【解決手段】 本発明は、衛星の質量を最適化する方法および装置に関する。方法は、近点(104)および遠点(105)を結ぶ軸(106)を中心として第1の軌道(103)を回転させることにより得られる第2の楕円軌道(107)を計算するステップ(201)であって、第2の楕円軌道(107)には、第1の最長食継続時間(D1)未満の第2の最長食継続時間(D2)が関連付けられる、ステップ(201)と、衛星を第2の軌道(107)に移動できるようにする操作を決定するステップ(202)と、第2の最長食継続時間(D2)中に衛星の動作を維持できるようにする第2の電池質量(Mb2)を計算し、操作を行うために必要な燃料の質量(Mc)を計算するステップ(203)とを含む。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、宇宙飛行の分野に関し、特に、大質量天体の軌道のフェーズを含むミッションを目的とする衛星の質量の最適化に関する。
【背景技術】
【0002】
衛星を捕捉軌道等の楕円度の高い軌道内に衛星を送り込み、恐らくは捕捉直後に、またはこの捕捉軌道内でいくらか時間を費やした後、ランダーを配備する将来の宇宙プログラムが計画されている。そのような軌道では、特定の幾何学的条件の場合、長期間の食が発生し得る。それら食の間、衛星には太陽エネルギーが与えられない。その場合、衛星の電力源サブシステムおよび熱調整サブシステムは、それら食の間にわたって動作可能なように、十分に評価しなければならない。
【0003】
長い食に先立つ挿入軌跡は、電力源サブシステムおよび熱調整サブシステムの重量を増大させるため、一般に使用されない。しかし、着陸が捕捉軌道から開始される状況では、所与の緯度で良好な条件下で(例えば、日光に当たっている中で)着陸することができない場合がある。この問題は、着陸が、捕捉軌道の直後ではなく、不利な着陸条件(例えば、火星の砂嵐の期間または惑星と地球との合)を避けるために捕捉軌道内でいくらかの時間を費やした後に行われる場合に生じる可能性が一層高い。
【0004】
軌道の形状が変更されないという制約を受ける状況では(例えば、軌道からの脱出操作を簡潔なままにするために)、低高度で円形軌道に変更するという解決策を考えることができない。それにも関わらず、可能な一解決策は、宇宙機に搭載される電池の容量、ひいては宇宙機に搭載される電池のサイズおよび重量を増大させることにある。この解決策は、電池がペイロードの質量と競合する高質量を示し、かつ/または宇宙機内で大きすぎる空間を占めるため、完全に満足のいくものではない。さらに、この解決策は、特に長い食に対して十分ではない恐れがある。
【発明の概要】
【発明が解決しようとする課題】
【0005】
本発明は、特に、長い食の問題を考慮して、大質量天体の軌道のフェーズを含むミッションを目的とする衛星の質量を最適化する方法および装置を提案することにより、上述した問題を軽減することを目的する。
【課題を解決するための手段】
【0006】
このために、本発明は、第1の楕円軌道内で大質量天体の軌道のフェーズを含むミッションを目的とする衛星の質量を最適化する方法であって、第1の楕円軌道の形状および向きは、ミッションの別のフェーズにより制約され、第1の軌道は、近点とも呼ばれる第1のポイントおよび遠点とも呼ばれる第2のポイントを含み、第1の最長食継続時間が関連付けられ、第1の最長食継続時間中に衛星の動作を維持できるようにするために第1の電池質量が必要であり、前記方法は、
− 近点および遠点を結ぶ軸を中心として第1の軌道を回転させることにより得られる第2の楕円軌道を計算するステップであって、第2の楕円軌道には、第1の最長食継続時間未満の第2の最長食継続時間が関連付けられる、ステップと、
− 衛星を第2の軌道に移動できるようにする操作を決定するステップと、
− 第2の最長食継続時間中に衛星の動作を維持できるようにする第2の電池質量を計算し、操作を行うために必要な燃料の質量を計算するステップと、
− その質量の燃料を衛星に追加し、第1の電池質量と第2の電池質量との差に等しい電池質量を除去するステップであって、燃料の質量と第2の電池質量との和が第1の電池質量よりも少ない、ステップと
を含むことを特徴とする、衛星の質量を最適化する方法を提供する。
【0007】
本発明は、数ヶ月続くミッションの、数時間続く比較的短いフェーズ中のみ発生する長い食のために衛星の電力源サブシステムおよび熱調整サブシステムが過大化することを回避するという利点を有する。
【0008】
これにより、長い食中に衛星が生き残るために必要な質量を、軌道変更操作を行うために必要な質量の燃料と交換することにより、衛星の設計の最適化が可能になる。このようにして節減された質量は、例えば、他の科学的用途に使用することができる。
【0009】
この操作は、有利には、遠点の近傍で行われる。衛星の速度はこの軌道部分では制限されるため、この操作を行うために必要な燃料の質量が大幅に低減される。
【0010】
本発明は、第1の楕円軌道内で大質量天体の軌道のフェーズを含むミッションを目的とする衛星の質量を最適化する装置であって、第1の楕円軌道の形状および向きは、ミッションの別のフェーズにより制約され、第1の軌道は、近点とも呼ばれる第1のポイントおよび遠点とも呼ばれる第2のポイントを含み、第1の最長食継続時間が関連付けられ、前記第1の最長食継続時間中に衛星の動作を維持できるようにするために第1の電池質量が必要であり、前記装置は、
− 近点および遠点を結ぶ軸を中心として第1の軌道を回転させることにより得られる第2の楕円軌道を計算する手段であって、第2の楕円軌道には、第1の最長食継続時間未満の第2の最長食継続時間が関連付けられる、手段と、
− 衛星を第2の軌道に移動できるようにする操作を決定する手段と、
− 第2の最長食継続時間中に衛星の動作を維持できるようにする第2の電池質量を計算し、操作を行うために必要な燃料の質量を計算する手段であって、その質量の燃料が衛星に追加され、第1の電池質量と第2の電池質量との差に等しい電池質量が衛星から除去され、燃料の質量と第2の電池質量との和が第1の電池質量よりも少ない、手段と
を含むことを特徴とする、衛星の質量を最適化する装置にも関する。
【0011】
非限定的な例として、図を使用して、与えられる詳細な説明を読むことにより、本発明がよりよく理解され、他の利点が明らかになろう。
【図面の簡単な説明】
【0012】
【図1】大質量天体の軌道内の宇宙機を表す。
【図2】本発明の方法の図である。
【図3】本発明の一実施形態の装置を表す。
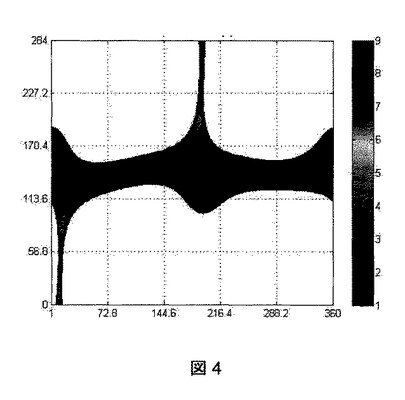
【図4】長い食の例を表す。
【発明を実施するための形態】
【0013】
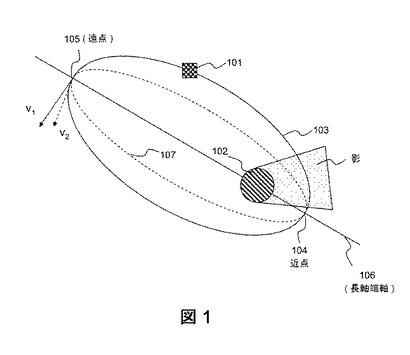
図1は、大質量天体102の軌道内の宇宙機101を示す。大質量天体は、例えば、惑星または月である。宇宙機は、例えば、ランダーを配備することを目的とする衛星または宇宙機である。宇宙機は楕円形の初期軌道103を辿る。楕円軌道は、長軸端として知られる2つの注目すべきポイントを有する。第1の近点104は、大質量天体102からの距離が最小の軌道103のポイントであり、第2の遠点105は、大質量天体102からの距離が最大の軌道103のポイントである。近点104および遠点105を繋ぐ軸106は、長軸端軸と呼ばれる。
【0014】
初期軌道内の宇宙機は、大質量天体の周囲の太陽の見掛けの回転に起因する不利な幾何学的条件によって生じる長い食、および恐らくは軌道の乱れ(大質量天体または他の天体の重力による乱れ)に遭遇する。
【0015】
本発明の解決策は、これら幾何学的条件が適用される前に操作を行うことにある。この操作の目的は、長軸端軸106を中心としての軌道平面(楕円平面)の回転を行うことである。初期軌道内の宇宙機の速度は、第1の速度ベクトルv1により定義される。この操作は、第1のベクトルv1の大きさを変更しない。他方、この操作は、長軸端軸106に垂直な平面での方向を変更して、第2の速度ベクトルv2を生成する。第1の楕円軌道103には、第1の最長食継続時間D1が関連付けられる。
【0016】
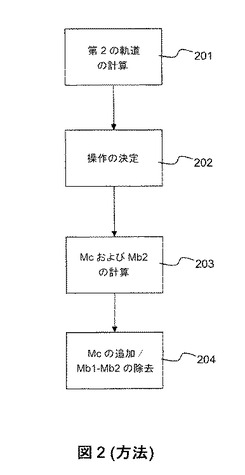
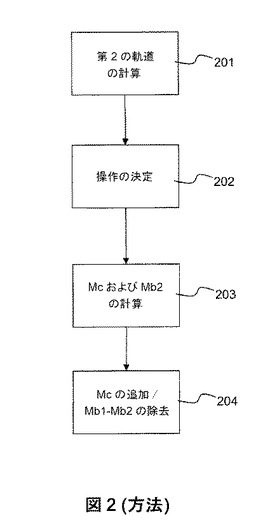
図2は、本発明の方法の図である。この方法は、
− 近点104および遠点105を結ぶ軸106を中心として第1の軌道103を回転させることにより得られる第2の楕円軌道107を計算するステップ201であって、第2の楕円軌道107には、第1の最長食継続時間D1未満の第2の最長食継続時間D2が関連付けられる、ステップ201と、
− 衛星を第2の軌道107に移動できるようにする操作を決定するステップ202と、
− 第2の最長食継続時間D2中に衛星の動作を維持できるようにする第2の電池質量Mb2を計算し、操作を行うために必要な燃料の質量Mcを計算するステップ203と、
− 質量Mcの燃料を衛星に追加し、第1の電池質量Mb1と第2の電池質量Mb2との差に等しい電池質量を除去するステップであって、燃料の質量Mcと第2の電池質量Mb2との和が第1の電池質量Mb1よりも少ない、ステップと
を含む。
【0017】
第2の楕円軌道107は、以下の条件:(i)第2の楕円軌道107は、第1の軌道と同じ遠点105および近点104を有すること、および(ii)第2の軌道の最長食継続時間D2(すなわち、この軌道内の衛星が日光を受けない最長継続時間)は、第1の軌道の最長食継続時間D1未満であること、に準拠するように決定される。第1の最長食継続時間D1と第2の最長食継続時間D2との差Dにより、電池質量Mbを計算することが可能である。この電池質量Mbは、継続時間の差Dの間に衛星の動作を維持するために必要な電池量を表す。
【0018】
衛星を第2の軌道107に移動できるようにする操作の実行に必要な燃料の質量Mcを特定することも可能である。
【0019】
燃料の質量Mcは、電池質量Mbよりも小さい。
【0020】
この解決策は、長い食の問題を解決すると共に、衛星の質量を低減するという利点を有する。
【0021】
この操作は、有利には、遠点105の近傍で実行される。楕円軌道の遠点は、衛星が最低速度を有するポイントである。このポイントにおいて、操作が消費する燃料は最小である。したがって、衛星がこのポイントに近い場合、例えば、このポイントの前後数度にあるときに、軌道の変更を開始することが好ましい。
【0022】
この方法は、有利には、衛星101を第1の軌道103に戻せるようにする操作を決定するステップをさらに含み、衛星は、第1の軌道103に戻れるようにする操作を行うために、追加の予備燃料を所有する。
【0023】
本発明の一特徴によれば、初期軌道内の衛星の速度は、方向を有する第1の速度ベクトルにより定義され、衛星を第2の軌道107に移動できるようにする操作は、長軸端軸106に垂直な平面において方向を変更する。
【0024】
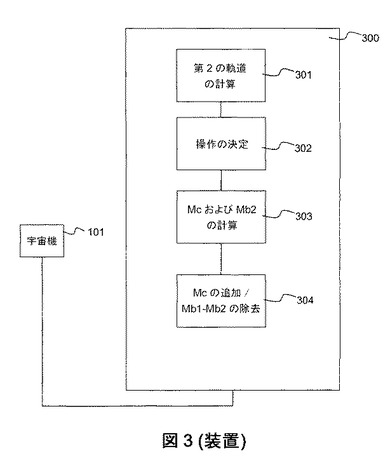
図3は、本発明の一実施形態の装置を表す。第1の楕円軌道103内で大質量天体102の軌道のフェーズを含むミッションを目的とする衛星101の質量を最適化する装置300であって、第1の楕円軌道103の形状および向きは、ミッションの別のフェーズにより制約され、第1の軌道103は、近点104とも呼ばれる第1のポイントおよび遠点105とも呼ばれる第2のポイントを含み、第1の最長食継続時間D1が関連付けられ、前記第1の最長食継続時間D1中に衛星の動作を維持できるようにするために第1の電池質量Mb1が必要である、装置300は、
− 近点104および遠点105を結ぶ軸106を中心として第1の軌道103を回転させることにより得られる第2の楕円軌道107を計算する手段301であって、第2の楕円軌道107には、第1の最長食継続時間D1未満の第2の最長食継続時間D2が関連付けられる、手段301と、
− 衛星を第2の軌道107に移動できるようにする操作を決定する手段302と、
− 第2の最長食継続時間D2中に衛星の動作を維持できるようにする第2の電池質量Mb2を計算し、操作を行うために必要な燃料の質量Mcを計算する手段303であって、質量Mcの燃料が衛星に追加され、第1の電池質量Mb1と第2の電池質量Mb2との差に等しい電池質量が電池から除去され、燃料の質量Mcと第2の電池質量Mb2との和が第1の電池質量Mb1よりも少ない、手段303と
を含む。
【0025】
本発明の装置は、有利には、衛星101を第1の軌道103に戻せるようにする操作を決定する手段をさらに含み、衛星は、第1の軌道103に戻れるようにする操作を行うために、追加の予備燃料を所有する。
【0026】
本発明の変形では、第2の軌道107を計算する手段301は、地上に配置される。
【0027】
本発明の別の変形では、第2の軌道107を計算する手段301は、衛星内に配置される。
【0028】
図4は、長い食の例を表す。グレーの影は、度単位の惑星挿入幾何学(B平面角度、横座標軸)および軌道内で費やされる日単位の継続時間(縦座標軸)の関数としての、惑星の楕円軌道内の時間単位での食の継続時間を表す。
【符号の説明】
【0029】
101 衛星
102 大質量天体
103 第1の楕円軌道
104 近点
105 遠点
106 長軸端軸
107 第2の楕円軌道
201 第2の楕円軌道を計算するステップ
202 操作を決定するステップ
203 第2の電池質量および操作を行うために必要な燃料の質量を計算するステップ
301 第2の楕円軌道を計算する手段
302 操作を決定する手段
303 第2の電池質量および操作の実行に必要な燃料の質量を計算する手段
D 第1の最長食継続時間と第2の最長食継続時間との差
D1 第1の最長食継続時間
D2 第2の最長食継続時間
Mb 継続時間の差の間に動作を維持するために必要な電池の質量
Mb1 第1の電池質量
Mb2 第2の電池質量
Mc 第2の軌道に移動する操作を行うのに必要な燃料の質量
【技術分野】
【0001】
本発明は、宇宙飛行の分野に関し、特に、大質量天体の軌道のフェーズを含むミッションを目的とする衛星の質量の最適化に関する。
【背景技術】
【0002】
衛星を捕捉軌道等の楕円度の高い軌道内に衛星を送り込み、恐らくは捕捉直後に、またはこの捕捉軌道内でいくらか時間を費やした後、ランダーを配備する将来の宇宙プログラムが計画されている。そのような軌道では、特定の幾何学的条件の場合、長期間の食が発生し得る。それら食の間、衛星には太陽エネルギーが与えられない。その場合、衛星の電力源サブシステムおよび熱調整サブシステムは、それら食の間にわたって動作可能なように、十分に評価しなければならない。
【0003】
長い食に先立つ挿入軌跡は、電力源サブシステムおよび熱調整サブシステムの重量を増大させるため、一般に使用されない。しかし、着陸が捕捉軌道から開始される状況では、所与の緯度で良好な条件下で(例えば、日光に当たっている中で)着陸することができない場合がある。この問題は、着陸が、捕捉軌道の直後ではなく、不利な着陸条件(例えば、火星の砂嵐の期間または惑星と地球との合)を避けるために捕捉軌道内でいくらかの時間を費やした後に行われる場合に生じる可能性が一層高い。
【0004】
軌道の形状が変更されないという制約を受ける状況では(例えば、軌道からの脱出操作を簡潔なままにするために)、低高度で円形軌道に変更するという解決策を考えることができない。それにも関わらず、可能な一解決策は、宇宙機に搭載される電池の容量、ひいては宇宙機に搭載される電池のサイズおよび重量を増大させることにある。この解決策は、電池がペイロードの質量と競合する高質量を示し、かつ/または宇宙機内で大きすぎる空間を占めるため、完全に満足のいくものではない。さらに、この解決策は、特に長い食に対して十分ではない恐れがある。
【発明の概要】
【発明が解決しようとする課題】
【0005】
本発明は、特に、長い食の問題を考慮して、大質量天体の軌道のフェーズを含むミッションを目的とする衛星の質量を最適化する方法および装置を提案することにより、上述した問題を軽減することを目的する。
【課題を解決するための手段】
【0006】
このために、本発明は、第1の楕円軌道内で大質量天体の軌道のフェーズを含むミッションを目的とする衛星の質量を最適化する方法であって、第1の楕円軌道の形状および向きは、ミッションの別のフェーズにより制約され、第1の軌道は、近点とも呼ばれる第1のポイントおよび遠点とも呼ばれる第2のポイントを含み、第1の最長食継続時間が関連付けられ、第1の最長食継続時間中に衛星の動作を維持できるようにするために第1の電池質量が必要であり、前記方法は、
− 近点および遠点を結ぶ軸を中心として第1の軌道を回転させることにより得られる第2の楕円軌道を計算するステップであって、第2の楕円軌道には、第1の最長食継続時間未満の第2の最長食継続時間が関連付けられる、ステップと、
− 衛星を第2の軌道に移動できるようにする操作を決定するステップと、
− 第2の最長食継続時間中に衛星の動作を維持できるようにする第2の電池質量を計算し、操作を行うために必要な燃料の質量を計算するステップと、
− その質量の燃料を衛星に追加し、第1の電池質量と第2の電池質量との差に等しい電池質量を除去するステップであって、燃料の質量と第2の電池質量との和が第1の電池質量よりも少ない、ステップと
を含むことを特徴とする、衛星の質量を最適化する方法を提供する。
【0007】
本発明は、数ヶ月続くミッションの、数時間続く比較的短いフェーズ中のみ発生する長い食のために衛星の電力源サブシステムおよび熱調整サブシステムが過大化することを回避するという利点を有する。
【0008】
これにより、長い食中に衛星が生き残るために必要な質量を、軌道変更操作を行うために必要な質量の燃料と交換することにより、衛星の設計の最適化が可能になる。このようにして節減された質量は、例えば、他の科学的用途に使用することができる。
【0009】
この操作は、有利には、遠点の近傍で行われる。衛星の速度はこの軌道部分では制限されるため、この操作を行うために必要な燃料の質量が大幅に低減される。
【0010】
本発明は、第1の楕円軌道内で大質量天体の軌道のフェーズを含むミッションを目的とする衛星の質量を最適化する装置であって、第1の楕円軌道の形状および向きは、ミッションの別のフェーズにより制約され、第1の軌道は、近点とも呼ばれる第1のポイントおよび遠点とも呼ばれる第2のポイントを含み、第1の最長食継続時間が関連付けられ、前記第1の最長食継続時間中に衛星の動作を維持できるようにするために第1の電池質量が必要であり、前記装置は、
− 近点および遠点を結ぶ軸を中心として第1の軌道を回転させることにより得られる第2の楕円軌道を計算する手段であって、第2の楕円軌道には、第1の最長食継続時間未満の第2の最長食継続時間が関連付けられる、手段と、
− 衛星を第2の軌道に移動できるようにする操作を決定する手段と、
− 第2の最長食継続時間中に衛星の動作を維持できるようにする第2の電池質量を計算し、操作を行うために必要な燃料の質量を計算する手段であって、その質量の燃料が衛星に追加され、第1の電池質量と第2の電池質量との差に等しい電池質量が衛星から除去され、燃料の質量と第2の電池質量との和が第1の電池質量よりも少ない、手段と
を含むことを特徴とする、衛星の質量を最適化する装置にも関する。
【0011】
非限定的な例として、図を使用して、与えられる詳細な説明を読むことにより、本発明がよりよく理解され、他の利点が明らかになろう。
【図面の簡単な説明】
【0012】
【図1】大質量天体の軌道内の宇宙機を表す。
【図2】本発明の方法の図である。
【図3】本発明の一実施形態の装置を表す。
【図4】長い食の例を表す。
【発明を実施するための形態】
【0013】
図1は、大質量天体102の軌道内の宇宙機101を示す。大質量天体は、例えば、惑星または月である。宇宙機は、例えば、ランダーを配備することを目的とする衛星または宇宙機である。宇宙機は楕円形の初期軌道103を辿る。楕円軌道は、長軸端として知られる2つの注目すべきポイントを有する。第1の近点104は、大質量天体102からの距離が最小の軌道103のポイントであり、第2の遠点105は、大質量天体102からの距離が最大の軌道103のポイントである。近点104および遠点105を繋ぐ軸106は、長軸端軸と呼ばれる。
【0014】
初期軌道内の宇宙機は、大質量天体の周囲の太陽の見掛けの回転に起因する不利な幾何学的条件によって生じる長い食、および恐らくは軌道の乱れ(大質量天体または他の天体の重力による乱れ)に遭遇する。
【0015】
本発明の解決策は、これら幾何学的条件が適用される前に操作を行うことにある。この操作の目的は、長軸端軸106を中心としての軌道平面(楕円平面)の回転を行うことである。初期軌道内の宇宙機の速度は、第1の速度ベクトルv1により定義される。この操作は、第1のベクトルv1の大きさを変更しない。他方、この操作は、長軸端軸106に垂直な平面での方向を変更して、第2の速度ベクトルv2を生成する。第1の楕円軌道103には、第1の最長食継続時間D1が関連付けられる。
【0016】
図2は、本発明の方法の図である。この方法は、
− 近点104および遠点105を結ぶ軸106を中心として第1の軌道103を回転させることにより得られる第2の楕円軌道107を計算するステップ201であって、第2の楕円軌道107には、第1の最長食継続時間D1未満の第2の最長食継続時間D2が関連付けられる、ステップ201と、
− 衛星を第2の軌道107に移動できるようにする操作を決定するステップ202と、
− 第2の最長食継続時間D2中に衛星の動作を維持できるようにする第2の電池質量Mb2を計算し、操作を行うために必要な燃料の質量Mcを計算するステップ203と、
− 質量Mcの燃料を衛星に追加し、第1の電池質量Mb1と第2の電池質量Mb2との差に等しい電池質量を除去するステップであって、燃料の質量Mcと第2の電池質量Mb2との和が第1の電池質量Mb1よりも少ない、ステップと
を含む。
【0017】
第2の楕円軌道107は、以下の条件:(i)第2の楕円軌道107は、第1の軌道と同じ遠点105および近点104を有すること、および(ii)第2の軌道の最長食継続時間D2(すなわち、この軌道内の衛星が日光を受けない最長継続時間)は、第1の軌道の最長食継続時間D1未満であること、に準拠するように決定される。第1の最長食継続時間D1と第2の最長食継続時間D2との差Dにより、電池質量Mbを計算することが可能である。この電池質量Mbは、継続時間の差Dの間に衛星の動作を維持するために必要な電池量を表す。
【0018】
衛星を第2の軌道107に移動できるようにする操作の実行に必要な燃料の質量Mcを特定することも可能である。
【0019】
燃料の質量Mcは、電池質量Mbよりも小さい。
【0020】
この解決策は、長い食の問題を解決すると共に、衛星の質量を低減するという利点を有する。
【0021】
この操作は、有利には、遠点105の近傍で実行される。楕円軌道の遠点は、衛星が最低速度を有するポイントである。このポイントにおいて、操作が消費する燃料は最小である。したがって、衛星がこのポイントに近い場合、例えば、このポイントの前後数度にあるときに、軌道の変更を開始することが好ましい。
【0022】
この方法は、有利には、衛星101を第1の軌道103に戻せるようにする操作を決定するステップをさらに含み、衛星は、第1の軌道103に戻れるようにする操作を行うために、追加の予備燃料を所有する。
【0023】
本発明の一特徴によれば、初期軌道内の衛星の速度は、方向を有する第1の速度ベクトルにより定義され、衛星を第2の軌道107に移動できるようにする操作は、長軸端軸106に垂直な平面において方向を変更する。
【0024】
図3は、本発明の一実施形態の装置を表す。第1の楕円軌道103内で大質量天体102の軌道のフェーズを含むミッションを目的とする衛星101の質量を最適化する装置300であって、第1の楕円軌道103の形状および向きは、ミッションの別のフェーズにより制約され、第1の軌道103は、近点104とも呼ばれる第1のポイントおよび遠点105とも呼ばれる第2のポイントを含み、第1の最長食継続時間D1が関連付けられ、前記第1の最長食継続時間D1中に衛星の動作を維持できるようにするために第1の電池質量Mb1が必要である、装置300は、
− 近点104および遠点105を結ぶ軸106を中心として第1の軌道103を回転させることにより得られる第2の楕円軌道107を計算する手段301であって、第2の楕円軌道107には、第1の最長食継続時間D1未満の第2の最長食継続時間D2が関連付けられる、手段301と、
− 衛星を第2の軌道107に移動できるようにする操作を決定する手段302と、
− 第2の最長食継続時間D2中に衛星の動作を維持できるようにする第2の電池質量Mb2を計算し、操作を行うために必要な燃料の質量Mcを計算する手段303であって、質量Mcの燃料が衛星に追加され、第1の電池質量Mb1と第2の電池質量Mb2との差に等しい電池質量が電池から除去され、燃料の質量Mcと第2の電池質量Mb2との和が第1の電池質量Mb1よりも少ない、手段303と
を含む。
【0025】
本発明の装置は、有利には、衛星101を第1の軌道103に戻せるようにする操作を決定する手段をさらに含み、衛星は、第1の軌道103に戻れるようにする操作を行うために、追加の予備燃料を所有する。
【0026】
本発明の変形では、第2の軌道107を計算する手段301は、地上に配置される。
【0027】
本発明の別の変形では、第2の軌道107を計算する手段301は、衛星内に配置される。
【0028】
図4は、長い食の例を表す。グレーの影は、度単位の惑星挿入幾何学(B平面角度、横座標軸)および軌道内で費やされる日単位の継続時間(縦座標軸)の関数としての、惑星の楕円軌道内の時間単位での食の継続時間を表す。
【符号の説明】
【0029】
101 衛星
102 大質量天体
103 第1の楕円軌道
104 近点
105 遠点
106 長軸端軸
107 第2の楕円軌道
201 第2の楕円軌道を計算するステップ
202 操作を決定するステップ
203 第2の電池質量および操作を行うために必要な燃料の質量を計算するステップ
301 第2の楕円軌道を計算する手段
302 操作を決定する手段
303 第2の電池質量および操作の実行に必要な燃料の質量を計算する手段
D 第1の最長食継続時間と第2の最長食継続時間との差
D1 第1の最長食継続時間
D2 第2の最長食継続時間
Mb 継続時間の差の間に動作を維持するために必要な電池の質量
Mb1 第1の電池質量
Mb2 第2の電池質量
Mc 第2の軌道に移動する操作を行うのに必要な燃料の質量
【特許請求の範囲】
【請求項1】
第1の楕円軌道(103)内で大質量天体(102)の軌道のフェーズを含むミッションを目的とする衛星(101)の質量を最適化する方法であって、前記第1の楕円軌道(103)の形状および向きは、前記ミッションの別のフェーズにより制約され、前記第1の軌道(103)は、近点(104)とも呼ばれる第1のポイントおよび遠点(105)とも呼ばれる第2のポイントを含み、第1の最長食継続時間(D1)が関連付けられ、前記第1の最長食継続時間(D1)中に衛星の動作を維持できるようにするために第1の電池質量(Mb1)が必要であり、前記方法は、
− 前記近点(104)および前記遠点(105)を結ぶ軸(106)を中心として前記第1の軌道(103)を回転させることにより得られる第2の楕円軌道(107)を計算するステップ(201)であって、前記第2の楕円軌道(107)には、前記第1の最長食継続時間(D1)未満の第2の最長食継続時間(D2)が関連付けられる、ステップ(201)と、
− 前記衛星を前記第2の軌道(107)に移動できるようにする操作を決定するステップ(202)と、
− 前記第2の最長食継続時間(D2)中に前記衛星の動作を維持できるようにする第2の電池質量(Mb2)を計算し、前記操作を行うために必要な燃料の質量(Mc)を計算するステップ(203)と、
− 前記質量(Mc)の燃料を前記衛星に追加し、前記第1の電池質量(Mb1)と前記第2の電池質量(Mb2)との差に等しい電池質量を除去するステップであって、前記燃料の質量(Mc)と前記第2の電池質量(Mb2)との和が前記第1の電池質量(Mb1)よりも少ない、ステップと、
を含むことを特徴とする、方法。
【請求項2】
前記操作が前記遠点(105)の近傍で行われることを特徴とする、請求項1に記載の衛星(101)の質量を最適化する方法。
【請求項3】
前記衛星(101)を前記第1の軌道(103)に戻せるようにする操作を決定するステップをさらに含み、前記衛星は、前記第1の軌道(103)に戻せるようにする操作を行うために、追加の予備燃料を所有することを特徴とする、請求項1または2に記載の衛星(101)の質量を最適化する方法。
【請求項4】
前記初期軌道内の前記衛星の速度が、方向を有する速度ベクトルにより定義され、前記衛星を前記第2の軌道(107)に移動できるようにする操作が、前記長軸端軸(106)に垂直な平面において前記ベクトルの方向を変更することを特徴とする、請求項1〜3のいずれか一項に記載の衛星(101)の質量を最適化する方法。
【請求項5】
第1の楕円軌道(103)内で大質量天体(102)の軌道のフェーズを含むミッションを目的とする衛星(101)の質量を最適化する装置であって、前記第1の楕円軌道(103)の形状および向きは、前記ミッションの別のフェーズにより制約され、前記第1の軌道(103)は、近点(104)とも呼ばれる第1のポイントおよび遠点(105)とも呼ばれる第2のポイントを含み、第1の最長食継続時間(D1)が関連付けられ、前記第1の最長食継続時間(D1)中に衛星の動作を維持できるようにするために第1の電池質量(Mb1)が必要であり、前記装置(300)は、
− 前記近点(104)および前記遠点(105)を結ぶ軸(106)を中心として前記第1の軌道(103)を回転させることにより得られる第2の楕円軌道(107)を計算する手段(301)であって、前記第2の楕円軌道(107)には、前記第1の最長食継続時間(D1)未満の第2の最長食継続時間(D2)が関連付けられる、手段(301)と、
− 前記衛星を前記第2の軌道(107)に移動できるようにする操作を決定する手段(302)と、
− 前記第2の最長食継続時間(D2)中に前記衛星の動作を維持できるようにする第2の電池質量(Mb2)を計算し、前記操作を行うために必要な燃料の質量(Mc)を計算する手段(303)であって、前記質量(Mc)の燃料が前記衛星に追加され、前記第1の電池質量(Mb1)と前記第2の電池質量(Mb2)との差に等しい電池質量が前記電池から除去され、前記燃料の質量(Mc)と前記第2の電池質量(Mb2)との和が前記第1の電池質量(Mb1)よりも少ない、手段(303)と
を含むことを特徴とする、装置。
【請求項6】
前記衛星(101)を前記第1の軌道(103)に戻せるようにする操作を決定する手段をさらに含み、前記衛星は、前記第1の軌道(103)に戻せるようにする操作を行うために、追加の予備燃料を所有することを特徴とする、請求項5に記載の衛星(101)の質量を最適化する装置。
【請求項7】
前記第2の軌道(107)を計算する手段(301)が地上に配置されることを特徴とする、請求項5または6に記載の衛星(101)の質量を最適化する装置。
【請求項8】
前記第2の軌道(107)を計算する手段(301)が前記衛星内に配置されることを特徴とする、請求項5または6に記載の衛星(101)の質量を最適化する装置。
【請求項1】
第1の楕円軌道(103)内で大質量天体(102)の軌道のフェーズを含むミッションを目的とする衛星(101)の質量を最適化する方法であって、前記第1の楕円軌道(103)の形状および向きは、前記ミッションの別のフェーズにより制約され、前記第1の軌道(103)は、近点(104)とも呼ばれる第1のポイントおよび遠点(105)とも呼ばれる第2のポイントを含み、第1の最長食継続時間(D1)が関連付けられ、前記第1の最長食継続時間(D1)中に衛星の動作を維持できるようにするために第1の電池質量(Mb1)が必要であり、前記方法は、
− 前記近点(104)および前記遠点(105)を結ぶ軸(106)を中心として前記第1の軌道(103)を回転させることにより得られる第2の楕円軌道(107)を計算するステップ(201)であって、前記第2の楕円軌道(107)には、前記第1の最長食継続時間(D1)未満の第2の最長食継続時間(D2)が関連付けられる、ステップ(201)と、
− 前記衛星を前記第2の軌道(107)に移動できるようにする操作を決定するステップ(202)と、
− 前記第2の最長食継続時間(D2)中に前記衛星の動作を維持できるようにする第2の電池質量(Mb2)を計算し、前記操作を行うために必要な燃料の質量(Mc)を計算するステップ(203)と、
− 前記質量(Mc)の燃料を前記衛星に追加し、前記第1の電池質量(Mb1)と前記第2の電池質量(Mb2)との差に等しい電池質量を除去するステップであって、前記燃料の質量(Mc)と前記第2の電池質量(Mb2)との和が前記第1の電池質量(Mb1)よりも少ない、ステップと、
を含むことを特徴とする、方法。
【請求項2】
前記操作が前記遠点(105)の近傍で行われることを特徴とする、請求項1に記載の衛星(101)の質量を最適化する方法。
【請求項3】
前記衛星(101)を前記第1の軌道(103)に戻せるようにする操作を決定するステップをさらに含み、前記衛星は、前記第1の軌道(103)に戻せるようにする操作を行うために、追加の予備燃料を所有することを特徴とする、請求項1または2に記載の衛星(101)の質量を最適化する方法。
【請求項4】
前記初期軌道内の前記衛星の速度が、方向を有する速度ベクトルにより定義され、前記衛星を前記第2の軌道(107)に移動できるようにする操作が、前記長軸端軸(106)に垂直な平面において前記ベクトルの方向を変更することを特徴とする、請求項1〜3のいずれか一項に記載の衛星(101)の質量を最適化する方法。
【請求項5】
第1の楕円軌道(103)内で大質量天体(102)の軌道のフェーズを含むミッションを目的とする衛星(101)の質量を最適化する装置であって、前記第1の楕円軌道(103)の形状および向きは、前記ミッションの別のフェーズにより制約され、前記第1の軌道(103)は、近点(104)とも呼ばれる第1のポイントおよび遠点(105)とも呼ばれる第2のポイントを含み、第1の最長食継続時間(D1)が関連付けられ、前記第1の最長食継続時間(D1)中に衛星の動作を維持できるようにするために第1の電池質量(Mb1)が必要であり、前記装置(300)は、
− 前記近点(104)および前記遠点(105)を結ぶ軸(106)を中心として前記第1の軌道(103)を回転させることにより得られる第2の楕円軌道(107)を計算する手段(301)であって、前記第2の楕円軌道(107)には、前記第1の最長食継続時間(D1)未満の第2の最長食継続時間(D2)が関連付けられる、手段(301)と、
− 前記衛星を前記第2の軌道(107)に移動できるようにする操作を決定する手段(302)と、
− 前記第2の最長食継続時間(D2)中に前記衛星の動作を維持できるようにする第2の電池質量(Mb2)を計算し、前記操作を行うために必要な燃料の質量(Mc)を計算する手段(303)であって、前記質量(Mc)の燃料が前記衛星に追加され、前記第1の電池質量(Mb1)と前記第2の電池質量(Mb2)との差に等しい電池質量が前記電池から除去され、前記燃料の質量(Mc)と前記第2の電池質量(Mb2)との和が前記第1の電池質量(Mb1)よりも少ない、手段(303)と
を含むことを特徴とする、装置。
【請求項6】
前記衛星(101)を前記第1の軌道(103)に戻せるようにする操作を決定する手段をさらに含み、前記衛星は、前記第1の軌道(103)に戻せるようにする操作を行うために、追加の予備燃料を所有することを特徴とする、請求項5に記載の衛星(101)の質量を最適化する装置。
【請求項7】
前記第2の軌道(107)を計算する手段(301)が地上に配置されることを特徴とする、請求項5または6に記載の衛星(101)の質量を最適化する装置。
【請求項8】
前記第2の軌道(107)を計算する手段(301)が前記衛星内に配置されることを特徴とする、請求項5または6に記載の衛星(101)の質量を最適化する装置。
【図1】


【図2】
【図3】
【図4】
【図2】
【図3】
【図4】
【公開番号】特開2011−148488(P2011−148488A)
【公開日】平成23年8月4日(2011.8.4)
【国際特許分類】
【出願番号】特願2011−7957(P2011−7957)
【出願日】平成23年1月18日(2011.1.18)
【出願人】(505157485)テールズ (231)
【公開日】平成23年8月4日(2011.8.4)
【国際特許分類】
【出願日】平成23年1月18日(2011.1.18)
【出願人】(505157485)テールズ (231)
[ Back to top ]