
衛星測位システムの異常値検出装置、異常値検出方法及び異常値検出プログラム
【課題】観測環境に変化が生じたり、各データ間に時系列的な相関関係がある場合であっても、精度良く衛星測位システムの異常値を検出する。
【解決手段】異常値指標算出部11は、衛星測位システムの各人工衛星と受信機との間の擬似距離などの時系列データの各時刻における異常値指標を算出する。動的モデル構成部12は、一定期間において異常値指標から動的にモデルを構成し、その動的モデルに基づいて、時系列の異常値指標から変化点指標を算出する。変化点指標は、突発的に増減した時系列値が存在する場合、その時系列値が単発的な動的モデルからの外れ値であるのか、それとも入力データの動的モデル自体が変化しているのかを判断する指標である。異常値検出部13は、変化点指標を予め設定した閾値と比較し、変化点指標の値が閾値よりも大きければ、その時刻の変化点指標に対応する異常値指標を異常値として検出する。
【解決手段】異常値指標算出部11は、衛星測位システムの各人工衛星と受信機との間の擬似距離などの時系列データの各時刻における異常値指標を算出する。動的モデル構成部12は、一定期間において異常値指標から動的にモデルを構成し、その動的モデルに基づいて、時系列の異常値指標から変化点指標を算出する。変化点指標は、突発的に増減した時系列値が存在する場合、その時系列値が単発的な動的モデルからの外れ値であるのか、それとも入力データの動的モデル自体が変化しているのかを判断する指標である。異常値検出部13は、変化点指標を予め設定した閾値と比較し、変化点指標の値が閾値よりも大きければ、その時刻の変化点指標に対応する異常値指標を異常値として検出する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は衛星測位システムの異常値検出装置、異常値検出方法及び異常値検出プログラムに係り、特に測位信号から算出される擬似距離に含まれる異常値を検出するGBAS等の衛星測位システムの異常値検出装置、異常値検出方法及び異常値検出プログラムに関する。
【背景技術】
【0002】
人工衛星が送信する測位信号を受信機で受信し、その測位信号から受信機自身の位置を知ることができる全地球測位システム(GPS:Global Positioning System)などの衛星測位システムは、車両、航空機、または船舶などの航法支援などに広く利用されている。この衛星測位システムにおける受信機は、測位信号から人工衛星との距離を算出し、その距離を基に自身の位置を算出する。この測位信号から算出される受信機と人工衛星との間の距離は、擬似距離と呼ばれる。
【0003】
上記の衛星測位システムでは、各人工衛星と受信機との間の擬似距離に基づいて測位計算を行うので、この擬似距離の精度は、測位精度に大きな影響を与える。この擬似距離には、時計誤差、電離層による誤差、対流圏による誤差、ノイズ等の様々な原因により生じた異常値が含まれている。このため、この異常値を適切に取り除くことが、衛星測位システムの測位精度を高め、利用時の安定性を向上させるうえで重要である。
【0004】
そこで、衛星測位システムにおいては、通常、逐次測定される擬似距離等の時系列データにおける異常値の発生状態を監視する異常値検出装置(IM:Integrity Monitor)が用いられることが多い。特に、地上型補強システム(GBAS:Ground Based Augmentation System)に代表されるような、衛星測位システムを航空機の航法に利用するシステムでは、高い安全性が要求されるため、異常値検出装置は不可欠である。
【0005】
非特許文献1に記載された衛星測位システムの異常値検出装置は、被モニタ事象のモデルを前日以前の過去データを用いてモデル化している。この異常値検出装置は、モデルとして10度の仰角幅毎にガウス分布を仮定し、この10度の仰角幅毎に求めた分散の値を用いて各データを正規化する。そして、この異常値検出装置は、正規化したデータの分布が標準ガウス分布に従うと仮定し、この標準ガウス分布に従わない値を異常値として検出する。
【0006】
また、特許文献1に記載された衛星測位システムの異常値検出装置は、所定の有効期間内における衛星軌道位置の値同士の差の最悪値と閾値とを比較し、最悪値が閾値を超えていた場合に、最悪値の元となった衛星軌道位置の値を異常値とする。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開2009−68927号公報
【非特許文献】
【0008】
【非特許文献1】Gang Xie,“OPTIMAL ON-AIRPORT MONITORING OF THE INTERGRITY OF GPS-BASE LANDING SYSTEMS”,Ph.D. Dissertation, Stanford University,pp.26-32,March 2004.
【発明の概要】
【発明が解決しようとする課題】
【0009】
しかし、非特許文献1や特許文献1に記載された異常値検出装置では、精度良く異常値を検出できない場合がある。
【0010】
すなわち、非特許文献1や特許文献1に記載された異常値検出装置では、過去のデータに基づく不変のモデルを仮定しているため、観測環境が変化する場合、不変のモデルでは対応できないことがある。このような場合は、計算結果が信用できないものとなり得る。
【0011】
また、これらの異常値検出装置では、モデル化において、各データ間に時系列的な相関を仮定していないため、時系列的な相関関係がある場合、その関係を捉えることができない。この場合も、計算結果に誤りが生じ得る。
【0012】
本発明は以上の点に鑑みなされたもので、観測環境に変化が生じたり、各データ間に時系列的な相関関係がある場合であっても、精度良く異常値を検出し得るGBAS等の衛星測位システムの異常値検出装置、異常値検出方法及び異常値検出プログラムを提供することを目的とする。
【課題を解決するための手段】
【0013】
上記の目的を達成するため、本発明の衛星測位システムの異常値検出装置は、衛星測位システムの異常値の検出対象である時系列値を第1の確率変数として、時系列値の重み付け統計量に基づき、所定の時刻以前の第1の期間における第1の確率密度関数を算出して第1の確率分布として取得する第1確率分布取得手段と、第1の期間内の単位時刻である各時刻tについて第1確率分布取得手段により取得された第1の確率分布に基づき、時刻tの直前の時刻t−1における第1の確率変数の選択情報量を不確実性指標として算出する不確実性指標算出手段と、時刻t以前の、第1の期間より短い第2の期間内で、不確実性指標算出手段により算出された不確実性指標の平均値を算出し、その平均値を第2の確率変数として、第2の確率変数の重み付け統計量に基づき、第1の期間における第2の確率密度関数を算出して第2の確率分布として取得する第2確率分布取得手段と、第2確率分布取得手段により各時刻t毎に取得された第2の確率分布に基づき、第2の確率分布の取得時刻tの直前の時刻t−1以前の第2の期間内の第2の確率分布の平均情報量を変化点指標として算出する変化点指標算出手段と、変化点指標算出手段により算出された変化点指標を予め設定された閾値と比較し、閾値より大きな値の変化点指標に対応する時系列値を異常値として検出する異常値検出手段とを有することを特徴とする。
【0014】
また、上記の目的を達成するため、本発明の衛星測位システムの異常値検出方法は、衛星測位システムの異常値の検出対象である時系列値を第1の確率変数として、時系列値の重み付け統計量に基づき、所定の時刻以前の第1の期間における第1の確率密度関数を算出して第1の確率分布として取得する第1のステップと、第1の期間内の単位時刻である各時刻tについて第1のステップにより取得された第1の確率分布に基づき、時刻tの直前の時刻t−1における第1の確率変数の選択情報量を不確実性指標として算出する第2のステップと、時刻t以前の、第1の期間より短い第2の期間内で、第2のステップにより算出された不確実性指標の平均値を算出する第3のステップと、第3のステップで算出された平均値を第2の確率変数として、第2の確率変数の重み付け統計量に基づき、第1の期間における第2の確率密度関数を算出して第2の確率分布として取得する第4のステップと、第4のステップにより各時刻t毎に取得された第2の確率分布に基づき、第2の確率分布の取得時刻tの直前の時刻t−1以前の第2の期間内の第2の確率分布の平均情報量を変化点指標として算出する第5のステップと、第5のステップにより算出された変化点指標を予め設定された閾値と比較し、閾値より大きな値の変化点指標に対応する時系列値を異常値として検出する第6のステップとを含むことを特徴とする。
【0015】
更に、上記の目的を達成するため、本発明の衛星測位システムの異常値検出プログラムは、コンピュータに、
衛星測位システムの異常値の検出対象である時系列値を第1の確率変数として、時系列値の重み付け統計量に基づき、所定の時刻以前の第1の期間における第1の確率密度関数を算出して第1の確率分布として取得する第1のステップと、第1の期間内の単位時刻である各時刻tについて第1のステップにより取得された第1の確率分布に基づき、時刻tの直前の時刻t−1における第1の確率変数の選択情報量を不確実性指標として算出する第2のステップと、時刻t以前の、第1の期間より短い第2の期間内で、第2のステップにより算出された不確実性指標の平均値を算出する第3のステップと、第3のステップで算出された平均値を第2の確率変数として、第2の確率変数の重み付け統計量に基づき、第1の期間における第2の確率密度関数を算出して第2の確率分布として取得する第4のステップと、第4のステップにより各時刻t毎に取得された第2の確率分布に基づき、第2の確率分布の取得時刻tの直前の時刻t−1以前の第2の期間内の第2の確率分布の平均情報量を変化点指標として算出する第5のステップと、第5のステップにより算出された変化点指標を予め設定された閾値と比較し、閾値より大きな値の変化点指標に対応する時系列値を異常値として検出する第6のステップとを実行させることを特徴とする。
【発明の効果】
【0016】
本発明によれば、時系列値を確率変数として第1の確率密度関数を取得し、その第1の確率密度関数から算出した選択情報量である不確実性指標の平均値を確率変数として第2の確率密度関数を算出し、更にその第2の確率密度関数の平均情報量である変化点指標を算出し、閾値より大きい変化点指標に対応する時系列値を異常値として検出するため、各データ間に時系列的な相関関係のある場合や、観測環境の変化が生じた場合であっても、精度の高い異常値の検出ができる。
【図面の簡単な説明】
【0017】
【図1】本発明の衛星測位システムの異常値検出装置の一実施形態のブロック図である。
【図2】図1中の動的モデル構成部の一実施形態のブロック図である。
【図3】本発明の衛星測位システムの異常値検出方法の一実施形態のフローチャートである。
【図4】時系列で観測される加速度値の時系列データに、意図的に混入される異常値の値と、その異常値を混入する時間の一例を示す図である。
【図5】図1の異常値検出装置による、図4に示した異常値が意図的に混入された加速度値の時系列データの異常値検出結果を示す図である。
【図6】本発明の衛星測位システムの異常検出装置が適用される地上型補強システム(GBAS)の一実施例のシステム構成図である。
【発明を実施するための形態】
【0018】
次に、本発明の実施形態について図面を参照して説明する。
【0019】
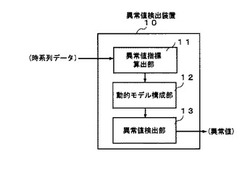
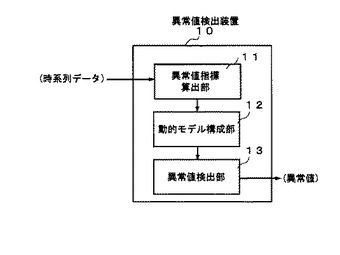
図1は、本発明になる衛星測位システムの異常値検出装置の一実施形態のブロック図を示す。同図に示すように、本実施形態の異常値検出装置10は、異常値指標算出部11、動的モデル構成部12及び異常値検出部13より構成され、入力される時系列データを監視し、衛星測位システムの異常値を検出する。
【0020】
異常値指標算出部11は、時系列データが入力され、その時系列データの各時刻における異常値指標を算出する。上記の時系列データは、衛星測位システムの各人工衛星と受信機との間の擬似距離や受信測位信号の位相などの、受信機において人工衛星からの測位信号に基づいて時系列に取得されたデータである。異常値指標とは、異常値の検出対象となる時系列値である。ここでは、異常値指標は、擬似距離又は位相の加速度等であり、検出したい異常に鋭敏に反応する値である。この異常値指標は、衛星測位システムの異常値の検出対象である本発明の時系列値に相当する。
【0021】
動的モデル構成部12は、一定期間において、異常値指標算出部11により時系列に求められた異常値指標から動的にモデルを構成する。また、動的モデル構成部12は、構成した動的モデルに基づいて、時系列の異常値指標から変化点指標を算出する。変化点指標は、突発的に増減した時系列値が存在する場合、その時系列値が単発的な動的モデルからの外れ値であるのか、それとも入力データの動的モデル自体が変化しているのかを判断する指標である。本実施形態において、この変化点指標は、動的モデル自体が変化している可能性が高いほど、高くなる値とされ、ある閾値より大きい変化点指標が算出された場合、その時刻を変化点として扱う。
【0022】
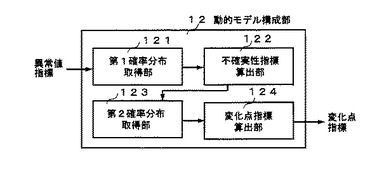
図2は、動的モデル構成部12の一実施形態のブロック図を示す。同図に示すように、動的モデル構成部12は、第1確率分布取得部121、不確実性指標算出部122、第2確率分布取得部123、及び変化点指標算出部124より構成される。
【0023】
第1確率分布取得部121は、衛星測位システムの異常値の検出対象である時系列値(すなわち、異常値指標)を第1の確率変数として、その異常値指標の重み付け統計量に基づき、所定の時刻以前の第1の期間における第1の確率密度関数を算出して、それを第1の確率分布として取得する。
【0024】
不確実性指標算出部122は、上記第1の期間内の単位時刻である各時刻tについて、第1確率分布取得部121により取得された第1の確率分布に基づき、時刻t−1に対応する第1の確率変数の選択情報量を不確実性指標として算出する。
【0025】
第2確率分布取得部123は、各時刻tについて、上記第1の期間よりも短い期間を第2の期間として、時刻t以前の第2の期間内で不確実性指標算出部122により算出された不確実性指標の平均値を算出し、その平均値を第2の確率変数として、第2の確率変数の重み付け統計量に基づき、上記第1の期間における第2の確率密度関数を算出して、それを第2の確率分布として取得する。
【0026】
変化点指標算出部124は、第2確率分布取得部123により各時刻t毎に取得された第2の確率分布に基づき、第2の確率分布の取得時刻tの直前の時刻t−1以前の第2の期間内の第2の確率分布(すなわち、第2の確率密度関数)の平均情報量を変化点指標として算出する。この変化点指標の算出において、動的モデル構成部12は、その計算のための母集団に時系列モデルを導入している。このため、動的モデル構成部12は、変化点指標の算出において、異常値指標の時系列な挙動を反映させることができる。
【0027】
図1に示す異常値検出部13は、動的モデル構成部12により各時刻t毎に算出された変化点指標を予め設定した閾値と比較し、変化点指標の値が閾値よりも大きければ、その時刻の変化点指標に対応する異常値指標(時系列値)を異常値として検出する。
【0028】
次に、図1及び図2に示した本実施形態の異常値検出装置10の動作について、図3のフローチャート等を併せ参照して詳細に説明する。
【0029】
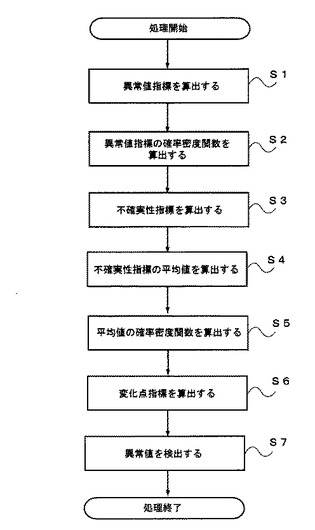
まず、異常値検出装置10は、異常値指標算出部11により、入力された時系列データから各時刻の異常値指標を算出する(ステップS1)。続いて、異常値検出装置10は第1確率分布取得部121により、ステップS1で算出された異常値指標を第1の確率変数として、現時刻以前の所定の第1の期間T1の期間内における、その第1の確率変数の第1の確率密度関数p(xt)を次式により求める(ステップS2)。
【0030】
【数1】

【0031】
(1)式において、tは各異常値指標(第1の確率変数)が算出された時刻であり、xtは時刻tにおける異常値指標(第1の確率変数)の値である。また、(1)式において、w1t-1は、期間T1のうち、時刻t−1以前の期間における、異常値指標(第1の確率変数)xtの重み付け平均値である。この重み付け平均値w1t-1は、現時刻に近いほど大きな値になるように重み付けを行った異常値指標(第1の確率変数)xtの平均値である。更に、(1)式において、σ1t-1は、期間T1のうち、時刻t−1以前の期間における、異常値指標(第1の確率変数)xtの重み付け分散値である。この重み付け分散値σ1t-1は、現時刻に近いほど大きな値になるように重み付けを行った異常値指標(第1の確率変数)xtの分散値である。
【0032】
続いて、異常値検出装置10は、不確実性指標算出部122により、第1確率分布取得部121から入力される時刻t−1における第1の確率密度関数に基づいて、次式によりt=2以降の各時刻tにおける不確実性指標ULI(t)を算出する(ステップS3)。
【0033】
【数2】
【0034】
時刻tの不確実性指標ULI(t)は、(2)式から時刻tの直前の時刻t−1における異常値指標の選択情報量である。上記(2)式の右辺のpt-1(xt|xt-1)は、時刻t−1において(1)式から算出された第1の確率密度関数である。
【0035】
すなわち、このpt-1(xt|xt-1)は、xt-1(=x1,x2,・・・,xt-1;時刻1からt−1までのデータ)に基づいて推定したパラメータθt-1で表される確率密度分布である。つまり、pt-1(xt|xt-1)=pt-1(xt|θt-1)である。因みに、θt-1=(w1t-1,σ1t-1)である。この(2)式の右辺は、時刻t=2以降の各時刻tにおいて、時刻t−1における確率密度関数pt-1(xt|xt-1)の対数のマイナス値、すなわち選択情報量を算出することを意味する。
【0036】
次に、異常値検出装置10は、第2確率分布取得部123により、不確実性指標算出部122により算出された不確実性指標ULI(t)に基づき、次式により各時刻tについて、時刻t以前の期間T2における不確実性指標の平均値ytを算出する(ステップS4)。ここで、期間T2の長さは、期間T1より短く設定される。
【0037】
【数3】
【0038】
(3)式において、ULI(i)は、時刻iに対応する不確実性指標を示す。
【0039】
第2確率分布取得部123は、続いて、上記の不確実性指標の平均値ytを第2の確率変数として、次式に基づき時刻t以前の期間T3における確率変数の第2の確率密度関数q(yt)を算出する(ステップS5)。この第2の確率密度関数q(yt)は第2の確率分布として取得される。ここで、期間T3の長さは、期間T1以下に設定される。
【0040】
【数4】
【0041】
(4)式において、w2t-1は期間T3のうち、時刻t−1以前の期間における第2の確率変数(不確実性指標の平均値)ytの重み付け平均値である。この重み付け平均値w2t-1は、現時刻に近いほど値が大きくなるように重み付けを行ったytの平均値である。また、(4)式において、σ2t-1は期間T3のうち、時刻t−1以前の期間における第2の確率変数(不確実性指標の平均値)ytの重み付け分散値である。この重み付け分散値σ2t-1は、現時刻に近いほど値が大きくなるように重み付けを行ったytの分散値である。
【0042】
次に、異常値検出装置10は、変化点指標算出部124により、第2確率分布取得部123により算出された第2の確率密度関数に基づき、次式により各時刻tにおける変化点指標CPI(t)を算出する(ステップS6)。
【0043】
【数5】
【0044】
(5)式において、T4は時刻t−1以前の期間であり、また、qi-1(yi|yi-1)は時刻iにおける第2の確率密度関数(第2の確率分布)である。(5)式の右辺は、各時刻tにおいて、時刻t−1以前の期間T4の第2の確率密度関数qi-1(yi|yi-1)の対数のマイナス値の平均値、すなわち平均情報量を算出することを意味する。ここで、期間T4の長さは、期間T1より短く設定される。また、本実施形態では期間T4の長さは、期間T2以下に設定される。
【0045】
異常値検出装置10は、期間T2及びT4の長さが短いほど演算量が小さくなり、変化点指標を速く算出することができるが、異常値検出における誤検出率が高くなる。一方、期間T2及びT4の長さが長いほど演算量が多くなり、変化点指標の算出が遅くなるが、異常値検出装置10は、高い精度で異常値を検出することができる。従って、上記の期間T2及びT4の長さは、変化点指標の算出速度(これは異常値の検出速度に対応する)と異常値の検出精度とのバランスを考慮して定められる。
【0046】
最後に、異常値検出装置10は、異常値検出部13により、各時刻について変化点指標算出部124において算出された変化点指標と予め設定した閾値とを比較し、閾値より変化点指標の値が大きければその時刻の異常値指標を異常値として検出する(ステップS7)。
【0047】
なお、上記の期間T1及びT3は、本発明における第1の期間に相当し、上記の期間T2及びT4は、本発明における第2の期間に相当する。
【0048】
次に、図4及び図5を参照して、異常値検出装置10が異常値を検出した結果の一例について説明する。図4及び図5では、入力された位相の加速度を異常値指標とする。ここで、人工衛星の軌道運動による自然な加速度の変化分は事前に排除している。
【0049】
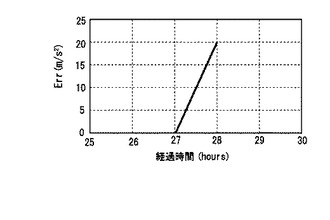
図4は、時系列で観測される加速度値の時系列データに、意図的に混入される異常値の値と、その異常値を混入する時間の一例を示す。同図において、縦軸は、意図的に混入される異常値の値を示し、横軸は、性能シミュレーションの開始時刻から経過した時間を示す。同図に斜線で示すように、異常値は、基準時から27時間経過した時点から28時間経過した時点までの期間において、徐々に大きな値となるように意図的に混入される。
【0050】
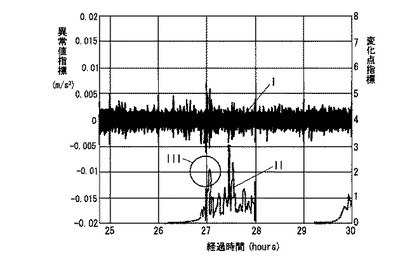
図5は、本実施形態の異常値検出装置10による、異常値が図4に示したように意図的に混入された加速度値の時系列データの異常値検出結果を示す。図5は、左側の縦軸が異常値指標を示し、右側の縦軸が変化点指標を示し、横軸が、加速度値の時系列データを取得した時間を示す。また、図5において、Iは本実施形態の異常値検出装置10による異常値変換指標の時間変化、IIは変化点指標の時間変化を示す。
【0051】
図5に示すように、本実施形態の異常値検出装置10は、丸で囲んだ期間IIIにおいて、閾値(例えば「1.5」)以上の比較的高い値の変化点指標を算出している。この期間IIIは基準時から27時間経過した時点であり、図4に示したように加速度値の時系列データに意図的に混入された異常値の混入時間と一致する。一方、図4に示したように、基準時から27時間経過するまでの期間と、28時間経過した後では、異常値は時系列データに混入されていないが、この期間において本実施形態の異常値検出装置10により得られる変化点指標は図5にIIで示すように閾値以下であり、異常値は検出されない。従って、本実施形態の異常値検出装置10によれば、時系列データに混入された異常値だけを精度良く検出できることが分かる。
【0052】
以上説明したように、本実施形態の異常値検出装置10は、時系列値を確率変数として、それぞれ現時刻に近いほど大きくなるように重み付けを行った重み付け平均値w1t-1及び重み付け分散値σ1t-1を用いることで、直近の観測環境に即した第1の確率密度関数を算出し、その第1の確率密度関数から選択情報量である不確実性指標を算出する。そして、異常値検出装置10は、更にその不確実性指標の平均値を確率変数として、それぞれ現時刻に近いほど大きくなるように重み付けを行った重み付け平均値w2t-1及び重み付け分散値σ2t-1を用いることで、直近の観測環境に即した第2の確率密度関数を算出し、その第2の確率密度関数から平均情報量である変化点指標を算出し、閾値より大きい変化点指標に対応する時系列値を異常値として検出する。
【0053】
これにより、異常値検出装置10は、第1の確率密度関数の算出では捉えられない時系列的な相関関係を、第2の確率密度関数の算出により捉えることができ、また、第1の確率密度関数の算出では捉えられない観測環境の変化を、第2の確率密度関数の算出により捉えることができる。このため、異常値検出装置10は、時系列的な相関関係のある場合や、観測環境の変化が生じた場合であっても、精度の高い異常値の検出ができる。
【実施例1】
【0054】
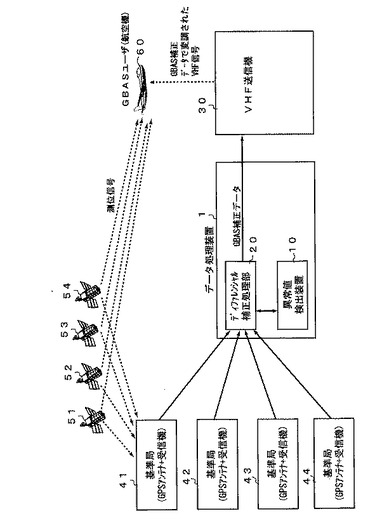
図6は、本発明になる異常検出装置が適用される地上型補強システム(GBAS)の一実施例のシステム構成図を示す。同図において、衛星測位システムである本実施例のGBASは、データ処理装置1と、VHF送信機30と、基準局41〜44と、GPSを構成する人工衛星(GPS衛星)51〜54と、GBASユーザ(航空機)60とから構成されている。
【0055】
データ処理装置1とVHF送信機30と基準局41〜44とはGBAS地上局を構成している。データ処理装置1は、上記の実施形態の異常値検出装置10を有し、またディファレンシャル補正処理部20を有する。
【0056】
基準局41〜44は、GPS衛星51〜54等から送信された測位信号を受信し、その受信信号であるGPS観測データをデータ処理装置1内のディファレンシャル補正処理部20へそれぞれ出力する。ディファレンシャル補正処理部20は、GPS観測データを基に異常値検出装置10の入力用に加工した統計情報量である時系列データを生成して異常値検出装置10へ供給する。
【0057】
異常値検出装置10は、前述した実施形態の動作を行い、異常値を検出した時には検出した異常値をディファレンシャル補正処理部20へ出力する。ディファレンシャル補正処理部20は、異常値が入力されると該当するGPS衛星又は基準局を使用禁止にする。異常値が入力されない場合は、すべてのGPS衛星51〜54や基準局41〜44の組み合わせにより、GPSによる航法の精度や安全性を向上させるためのGBAS補正データを公知の方法により生成してVHS受信機30へ供給する。VHS送信機30は、入力されたGBAS補正データで変調されたVHS信号を送信する。
【0058】
GBASユーザである航空機60は、GPS衛星51〜54から送信された測位信号を受信して位置情報を取得するGPS受信機と、VHS送信機30から送信されたGBAS補正データで変調されたVHS信号を受信する受信機(いずれも図示せず)を搭載している。航空機60は、GPS受信機の受信信号から取得した所定の情報と、VHS信号の受信機の受信信号から復調したGBAS補正データとを、公知の方法により着陸誘導等に用いることで、安全な航法を確保する。
【0059】
なお、本発明は以上の実施形態及び実施例に限定されるものではなく、例えば、上記実施形態の異常値検出装置10は、(1)式及び(4)式により計2回確率分布(確率密度関数)を求めているが、(4)式で算出された値を確率変数として、その確率変数の重み付け統計量に基づき更に確率密度関数を求め、その確率密度関数から変曲点指標を算出し、その変曲点指標と閾値との比較結果に基づいて、異常値を検知する構成としてもよい。
【0060】
また、本発明は図3のフローチャートの全部又は一部のステップをコンピュータである中央処理装置(CPU:Central Processing Unit)に実行させる異常値検出プログラムも包含する。この場合、異常値検出装置10は、処理装置と、主記憶装置と、本発明の異常値検出プログラムを記憶した記憶装置とを備え、処理装置と主記憶装置により上記の異常値検出プログラムを実行することにより、図3のフローチャートの全部又は一部のステップを実現する構成とする。ここで、上記の処理装置には異常値検出プログラムに従って処理を実行するCPUが設けられる。また、上記の主記憶装置は、図3のフローチャートで説明した処理に必要なデータ、処理装置による演算処理の過程で算出されるデータ及び演算処理の結果を保持する。
【0061】
更に、本発明は人工衛星からの測位信号を利用する衛星測位システムであれば、GBAS以外の公知の他の衛星測位システムにも適用可能である。
【0062】
以上の実施形態の一部又は全部は、以下の付記のようにも記載されうるが、以下には限られない。
【0063】
(付記1)
衛星測位システムの異常値の検出対象である時系列値を第1の確率変数として、前記時系列値の重み付け統計量に基づき、所定の時刻以前の第1の期間における第1の確率密度関数を算出して第1の確率分布として取得する第1確率分布取得手段と、
前記第1の期間内の単位時刻である各時刻tについて前記第1確率分布取得手段により取得された前記第1の確率分布に基づき、前記時刻tの直前の時刻t−1における前記第1の確率変数の選択情報量を不確実性指標として算出する不確実性指標算出手段と、
前記時刻t以前の、前記第1の期間より短い第2の期間内で、前記不確実性指標算出手段により算出された前記不確実性指標の平均値を算出し、その平均値を第2の確率変数として、前記第2の確率変数の重み付け統計量に基づき、前記第1の期間における第2の確率密度関数を算出して第2の確率分布として取得する第2確率分布取得手段と、
前記第2確率分布取得手段により各時刻t毎に取得された前記第2の確率分布に基づき、前記第2の確率分布の取得時刻tの直前の時刻t−1以前の前記第2の期間内の前記第2の確率分布の平均情報量を変化点指標として算出する変化点指標算出手段と、
前記変化点指標算出手段により算出された前記変化点指標を予め設定された閾値と比較し、前記閾値より大きな値の前記変化点指標に対応する前記時系列値を前記異常値として検出する異常値検出手段と
を有することを特徴とする衛星測位システムの異常値検出装置。
【0064】
(付記2)
前記第2確率分布取得手段は、前記第2の期間内で前記不確実性指標の平均値を算出し、その平均値を前記第2の確率変数として、前記第2の確率変数の重み付け統計量に基づき、前記第1の期間の長さ以下の期間である第3の期間における前記第2の確率密度関数を算出して前記第2の確率分布として取得し、
前記変化点指標算出手段は、前記時刻t−1に対応する前記第2の確率分布に基づき、前記時刻t−1以前で、前記第2の期間以下の長さである第4の期間内の前記第2の確率分布の平均情報量を前記変化点指標として算出する
ことを特徴とする付記1記載の衛星測位システムの異常値検出装置。
【0065】
(付記3)
前記時系列値は、衛星測位システムの各人工衛星と受信機との間の擬似距離や測位信号の位相などの、前記受信機において受信した前記人工衛星からの測位信号に基づいて時系列に取得されたデータであることを特徴とする付記1又は2記載の衛星測位システムの異常値検出装置。
【0066】
(付記4)
前記第1確率分布取得手段は、前記時刻tにおける前記第1の確率変数をxt、前記第1の期間のうち、前記時刻t−1以前の期間における、前記時系列値が新しいほど大きな値になるように重み付けを行った前記第1の確率変数xtの重み付け平均値をw1t-1、前記第1の期間のうち、前記時刻t−1以前の期間における、新しい時系列値ほど大きな値になるように重み付けを行った前記第1の確率変数xtの重み付け分散値をσ1t-1としたとき、次式
【0067】
【数6】
【0068】
により算出される前記第1の確率密度関数p(xt)を前記第1の確率分布として取得することを特徴とする付記1乃至3のうちいずれか一項記載の衛星測位システムの異常値検出装置。
【0069】
(付記5)
前記不確実性指標算出手段は、前記時刻tにおける前記第1の確率変数をxt、前記時刻t−1における前記第1の確率密度関数をpt-1(xt|xt-1)としたとき、次式
【0070】
【数7】
【0071】
により算出されるULI(t)を前記時刻tにおける前記不確実性指標として算出することを特徴とする付記1乃至4のうちいずれか一項記載の衛星測位システムの異常値検出装置。
【0072】
(付記6)
前記第2確率分布取得手段は、前記第2の期間をT2、時刻iに対応する前記不確実性指標をULI(i)としたとき、次式
【0073】
【数8】
【0074】
により、前記時刻t以前の前記第2の期間における前記不確実性指標の平均値である前記第2の確率変数ytを算出し、更に前記第1の期間のうち、前記時刻t−1以前の期間における、前記時系列値が新しいほど大きな値になるように重み付けを行った前記第2の確率変数ytの重み付け平均値をw2t-1、前記第1の期間のうち、前記時刻t−1以前の期間における、前記時系列値が新しいほど大きな値になるように重み付けを行った前記第2の確率変数ytの重み付け分散値をσ2t-1としたとき、次式
【0075】
【数9】
【0076】
により算出される前記第2の確率密度関数q(yt)を前記第2の確率分布として取得することを特徴とする付記1乃至5のうちいずれか一項記載の衛星測位システムの異常値検出装置。
【0077】
(付記7)
前記変化点指標算出手段は、前記時刻t−1以前の前記第4の期間をT4、前記時刻iにおける前記第2の確率密度関数をqi-1(yi|yi-1)としたとき、次式
【0078】
【数10】
【0079】
により算出されるCPI(t)を前記時刻tにおける前記変化点指標として算出することを特徴とする付記2又は6記載の衛星測位システムの異常値検出装置。
【0080】
(付記8)
前記第2確率分布取得手段により各時刻t毎に取得された前記第2の確率分布を確率変数として、その確率変数の重み付け統計量に基づき、第3の確率密度関数を算出する算出手段を更に有し、
前記変化点指標算出手段は、前記第3の確率密度関数から変曲点指標を算出し、前記異常値検出手段は、前記変曲点指標を予め設定された閾値と比較し、前記閾値より大きな値の前記変曲点指標に対応する前記時系列値を異常値として検出することを特徴とする付記1記載の衛星測位システムの異常値検出装置。
【0081】
(付記9)
衛星測位システムの異常値の検出対象である時系列値を第1の確率変数として、前記時系列値の重み付け統計量に基づき、所定の時刻以前の第1の期間における第1の確率密度関数を算出して第1の確率分布として取得する第1のステップと、
前記第1の期間内の単位時刻である各時刻tについて前記第1のステップにより取得された前記第1の確率分布に基づき、前記時刻tの直前の時刻t−1における前記第1の確率変数の選択情報量を不確実性指標として算出する第2のステップと、
前記時刻t以前の、前記第1の期間より短い第2の期間内で、前記第2のステップにより算出された前記不確実性指標の平均値を算出する第3のステップと、
前記第3のステップで算出された前記平均値を第2の確率変数として、前記第2の確率変数の重み付け統計量に基づき、前記第1の期間における第2の確率密度関数を算出して第2の確率分布として取得する第4のステップと、
前記第4のステップにより各時刻t毎に取得された前記第2の確率分布に基づき、前記第2の確率分布の取得時刻tの直前の時刻t−1以前の前記第2の期間内の前記第2の確率分布の平均情報量を変化点指標として算出する第5のステップと、
前記第5のステップにより算出された前記変化点指標を予め設定された閾値と比較し、前記閾値より大きな値の前記変化点指標に対応する前記時系列値を前記異常値として検出する第6のステップと
を含むことを特徴とする衛星測位システムの異常値検出方法。
【0082】
(付記10)
前記第4のステップは、前記平均値を前記第2の確率変数として、前記第2の確率変数の重み付け統計量に基づき、前記第1の期間の長さ以下の期間である第3の期間における前記第2の確率密度関数を算出して前記第2の確率分布として取得し、
前記第5のステップは、前記時刻t−1に対応する前記第2の確率分布に基づき、前記時刻t−1以前で、前記第2の期間以下の長さである第4の期間内の前記第2の確率分布の平均情報量を前記変化点指標として算出することを特徴とする付記9記載の衛星測位システムの異常値検出方法。
【0083】
(付記11)
前記時系列値は、衛星測位システムの各人工衛星と受信機との間の擬似距離や測位信号の位相などの、前記受信機において受信した前記人工衛星からの測位信号に基づいて時系列に取得されたデータであることを特徴とする付記9又は10記載の衛星測位システムの異常値検出方法。
【0084】
(付記12)
前記第1のステップは、前記時刻tにおける前記第1の確率変数をxt、前記第1の期間のうち、前記時刻t−1以前の期間における、前記時系列値が新しいほど大きな値になるように重み付けを行った前記第1の確率変数xtの重み付け平均値をw1t-1、前記第1の期間のうち、前記時刻t−1以前の期間における、新しい時系列値ほど大きな値になるように重み付けを行った前記第1の確率変数xtの重み付け分散値をσ1t-1としたとき、次式
【0085】
【数11】
【0086】
により算出される前記第1の確率密度関数p(xt)を前記第1の確率分布として取得することを特徴とする付記9乃至11のうちいずれか一項記載の衛星測位システムの異常値検出方法。
【0087】
(付記13)
前記第2のステップは、前記時刻tにおける前記第1の確率変数をxt、前記時刻t−1における前記第1の確率密度関数をpt-1(xt|xt-1)としたとき、次式
【0088】
【数12】
【0089】
により算出されるULI(t)を前記時刻tにおける前記不確実性指標として算出することを特徴とする付記9乃至12のうちいずれか一項記載の衛星測位システムの異常値検出方法。
【0090】
(付記14)
前記第3のステップは、前記第2の期間をT2、時刻iに対応する前記不確実性指標をULI(i)としたとき、次式
【0091】
【数13】
【0092】
により、前記時刻t以前の前記第2の期間における前記不確実性指標の平均値である前記第2の確率変数ytを算出することを特徴とする付記9乃至13のうちいずれか一項記載の衛星測位システムの異常値検出方法。
【0093】
(付記15)
前記第4のステップは、前記第1の期間のうち、前記時刻t−1以前の期間における、前記時系列値が新しいほど大きな値になるように重み付けを行った前記第2の確率変数ytの重み付け平均値をw2t-1、前記第1の期間のうち、前記時刻t−1以前の期間における、前記時系列値が新しいほど大きな値になるように重み付けを行った前記第2の確率変数ytの重み付け分散値をσ2t-1としたとき、次式
【0094】
【数14】
【0095】
により算出される前記第2の確率密度関数q(yt)を前記第2の確率分布として取得することを特徴とする付記14記載の衛星測位システムの異常値検出方法。
【0096】
(付記16)
前記第5のステップは、前記時刻t−1以前の前記第4の期間をT4、前記時刻iにおける前記第2の確率密度関数をqi-1(yi|yi-1)としたとき、次式
【0097】
【数15】
【0098】
により算出されるCPI(t)を前記時刻tにおける前記変化点指標として算出することを特徴とする付記10又は15記載の衛星測位システムの異常値検出方法。
【0099】
(付記17)
コンピュータに、
衛星測位システムの異常値の検出対象である時系列値を第1の確率変数として、前記時系列値の重み付け統計量に基づき、所定の時刻以前の第1の期間における第1の確率密度関数を算出して第1の確率分布として取得する第1のステップと、
前記第1の期間内の単位時刻である各時刻tについて前記第1のステップにより取得された前記第1の確率分布に基づき、前記時刻tの直前の時刻t−1における前記第1の確率変数の選択情報量を不確実性指標として算出する第2のステップと、
前記時刻t以前の、前記第1の期間より短い第2の期間内で、前記第2のステップにより算出された前記不確実性指標の平均値を算出する第3のステップと、
前記第3のステップで算出された前記平均値を第2の確率変数として、前記第2の確率変数の重み付け統計量に基づき、前記第1の期間における第2の確率密度関数を算出して第2の確率分布として取得する第4のステップと、
前記第4のステップにより各時刻t毎に取得された前記第2の確率分布に基づき、前記第2の確率分布の取得時刻tの直前の時刻t−1以前の前記第2の期間内の前記第2の確率分布の平均情報量を変化点指標として算出する第5のステップと、
前記第5のステップにより算出された前記変化点指標を予め設定された閾値と比較し、前記閾値より大きな値の前記変化点指標に対応する前記時系列値を前記異常値として検出する第6のステップと
を実行させることを特徴とする衛星測位システムの異常値検出プログラム。
【0100】
(付記18)
前記第4のステップは、前記平均値を前記第2の確率変数として、前記第2の確率変数の重み付け統計量に基づき、前記第1の期間の長さ以下の期間である第3の期間における前記第2の確率密度関数を算出して前記第2の確率分布として取得し、
前記第5のステップは、前記時刻t−1に対応する前記第2の確率分布に基づき、前記時刻t−1以前で、前記第2の期間以下の長さである第4の期間内の前記第2の確率分布の平均情報量を前記変化点指標として算出することを特徴とする付記17記載の衛星測位システムの異常値検出プログラム。
【0101】
(付記19)
前記時系列値は、衛星測位システムの各人工衛星と受信機との間の擬似距離や測位信号の位相などの、前記受信機において受信した前記人工衛星からの測位信号に基づいて時系列に取得されたデータであることを特徴とする付記17又は18記載の衛星測位システムの異常値検出プログラム。
【0102】
(付記20)
前記第1のステップは、前記時刻tにおける前記第1の確率変数をxt、前記第1の期間のうち、前記時刻t−1以前の期間における、前記時系列値が新しいほど大きな値になるように重み付けを行った前記第1の確率変数xtの重み付け平均値をw1t-1、前記第1の期間のうち、前記時刻t−1以前の期間における、新しい時系列値ほど大きな値になるように重み付けを行った前記第1の確率変数xtの重み付け分散値をσ1t-1としたとき、次式
【0103】
【数16】
【0104】
により算出される前記第1の確率密度関数p(xt)を前記第1の確率分布として取得することを特徴とする付記17乃至19のうちいずれか一項記載の衛星測位システムの異常値検出プログラム。
【0105】
(付記21)
前記第2のステップは、前記時刻tにおける前記第1の確率変数をxt、前記時刻t−1における前記第1の確率密度関数をpt-1(xt|xt-1)としたとき、次式
【0106】
【数17】
【0107】
により算出されるULI(t)を前記時刻tにおける前記不確実性指標として算出することを特徴とする付記17乃至20のうちいずれか一項記載の衛星測位システムの異常値検出プログラム。
【0108】
(付記22)
前記第3のステップは、前記第2の期間をT2、時刻iに対応する前記不確実性指標をULI(i)としたとき、次式
【0109】
【数18】
【0110】
により、前記時刻t以前の前記第2の期間における前記不確実性指標の平均値である前記第2の確率変数ytを算出することを特徴とする付記17乃至21のうちいずれか一項記載の衛星測位システムの異常値検出プログラム。
【0111】
(付記23)
前記第4のステップは、前記第1の期間のうち、前記時刻t−1以前の期間における、前記時系列値が新しいほど大きな値になるように重み付けを行った前記第2の確率変数ytの重み付け平均値をw2t-1、前記第1の期間のうち、前記時刻t−1以前の期間における、前記時系列値が新しいほど大きな値になるように重み付けを行った前記第2の確率変数ytの重み付け分散値をσ2t-1としたとき、次式
【0112】
【数19】
【0113】
により算出される前記第2の確率密度関数q(yt)を前記第2の確率分布として取得することを特徴とする付記22記載の衛星測位システムの異常値検出プログラム。
【0114】
(付記24)
前記第5のステップは、前記時刻t−1以前の前記第4の期間をT4、前記時刻iにおける前記第2の確率密度関数をqi-1(yi|yi-1)としたとき、次式
【0115】
【数20】
【0116】
により算出されるCPI(t)を前記時刻tにおける前記変化点指標として算出することを特徴とする付記18又は23記載の衛星測位システムの異常値検出プログラム。
【符号の説明】
【0117】
10 異常値検出装置
11 異常値指標算出部
12 動的モデル構成部
13 異常値検出部
121 第1確率分布取得部
122 不確実性指標算出部
123 第2確率分布取得部
124 変化点指標算出部
【技術分野】
【0001】
本発明は衛星測位システムの異常値検出装置、異常値検出方法及び異常値検出プログラムに係り、特に測位信号から算出される擬似距離に含まれる異常値を検出するGBAS等の衛星測位システムの異常値検出装置、異常値検出方法及び異常値検出プログラムに関する。
【背景技術】
【0002】
人工衛星が送信する測位信号を受信機で受信し、その測位信号から受信機自身の位置を知ることができる全地球測位システム(GPS:Global Positioning System)などの衛星測位システムは、車両、航空機、または船舶などの航法支援などに広く利用されている。この衛星測位システムにおける受信機は、測位信号から人工衛星との距離を算出し、その距離を基に自身の位置を算出する。この測位信号から算出される受信機と人工衛星との間の距離は、擬似距離と呼ばれる。
【0003】
上記の衛星測位システムでは、各人工衛星と受信機との間の擬似距離に基づいて測位計算を行うので、この擬似距離の精度は、測位精度に大きな影響を与える。この擬似距離には、時計誤差、電離層による誤差、対流圏による誤差、ノイズ等の様々な原因により生じた異常値が含まれている。このため、この異常値を適切に取り除くことが、衛星測位システムの測位精度を高め、利用時の安定性を向上させるうえで重要である。
【0004】
そこで、衛星測位システムにおいては、通常、逐次測定される擬似距離等の時系列データにおける異常値の発生状態を監視する異常値検出装置(IM:Integrity Monitor)が用いられることが多い。特に、地上型補強システム(GBAS:Ground Based Augmentation System)に代表されるような、衛星測位システムを航空機の航法に利用するシステムでは、高い安全性が要求されるため、異常値検出装置は不可欠である。
【0005】
非特許文献1に記載された衛星測位システムの異常値検出装置は、被モニタ事象のモデルを前日以前の過去データを用いてモデル化している。この異常値検出装置は、モデルとして10度の仰角幅毎にガウス分布を仮定し、この10度の仰角幅毎に求めた分散の値を用いて各データを正規化する。そして、この異常値検出装置は、正規化したデータの分布が標準ガウス分布に従うと仮定し、この標準ガウス分布に従わない値を異常値として検出する。
【0006】
また、特許文献1に記載された衛星測位システムの異常値検出装置は、所定の有効期間内における衛星軌道位置の値同士の差の最悪値と閾値とを比較し、最悪値が閾値を超えていた場合に、最悪値の元となった衛星軌道位置の値を異常値とする。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開2009−68927号公報
【非特許文献】
【0008】
【非特許文献1】Gang Xie,“OPTIMAL ON-AIRPORT MONITORING OF THE INTERGRITY OF GPS-BASE LANDING SYSTEMS”,Ph.D. Dissertation, Stanford University,pp.26-32,March 2004.
【発明の概要】
【発明が解決しようとする課題】
【0009】
しかし、非特許文献1や特許文献1に記載された異常値検出装置では、精度良く異常値を検出できない場合がある。
【0010】
すなわち、非特許文献1や特許文献1に記載された異常値検出装置では、過去のデータに基づく不変のモデルを仮定しているため、観測環境が変化する場合、不変のモデルでは対応できないことがある。このような場合は、計算結果が信用できないものとなり得る。
【0011】
また、これらの異常値検出装置では、モデル化において、各データ間に時系列的な相関を仮定していないため、時系列的な相関関係がある場合、その関係を捉えることができない。この場合も、計算結果に誤りが生じ得る。
【0012】
本発明は以上の点に鑑みなされたもので、観測環境に変化が生じたり、各データ間に時系列的な相関関係がある場合であっても、精度良く異常値を検出し得るGBAS等の衛星測位システムの異常値検出装置、異常値検出方法及び異常値検出プログラムを提供することを目的とする。
【課題を解決するための手段】
【0013】
上記の目的を達成するため、本発明の衛星測位システムの異常値検出装置は、衛星測位システムの異常値の検出対象である時系列値を第1の確率変数として、時系列値の重み付け統計量に基づき、所定の時刻以前の第1の期間における第1の確率密度関数を算出して第1の確率分布として取得する第1確率分布取得手段と、第1の期間内の単位時刻である各時刻tについて第1確率分布取得手段により取得された第1の確率分布に基づき、時刻tの直前の時刻t−1における第1の確率変数の選択情報量を不確実性指標として算出する不確実性指標算出手段と、時刻t以前の、第1の期間より短い第2の期間内で、不確実性指標算出手段により算出された不確実性指標の平均値を算出し、その平均値を第2の確率変数として、第2の確率変数の重み付け統計量に基づき、第1の期間における第2の確率密度関数を算出して第2の確率分布として取得する第2確率分布取得手段と、第2確率分布取得手段により各時刻t毎に取得された第2の確率分布に基づき、第2の確率分布の取得時刻tの直前の時刻t−1以前の第2の期間内の第2の確率分布の平均情報量を変化点指標として算出する変化点指標算出手段と、変化点指標算出手段により算出された変化点指標を予め設定された閾値と比較し、閾値より大きな値の変化点指標に対応する時系列値を異常値として検出する異常値検出手段とを有することを特徴とする。
【0014】
また、上記の目的を達成するため、本発明の衛星測位システムの異常値検出方法は、衛星測位システムの異常値の検出対象である時系列値を第1の確率変数として、時系列値の重み付け統計量に基づき、所定の時刻以前の第1の期間における第1の確率密度関数を算出して第1の確率分布として取得する第1のステップと、第1の期間内の単位時刻である各時刻tについて第1のステップにより取得された第1の確率分布に基づき、時刻tの直前の時刻t−1における第1の確率変数の選択情報量を不確実性指標として算出する第2のステップと、時刻t以前の、第1の期間より短い第2の期間内で、第2のステップにより算出された不確実性指標の平均値を算出する第3のステップと、第3のステップで算出された平均値を第2の確率変数として、第2の確率変数の重み付け統計量に基づき、第1の期間における第2の確率密度関数を算出して第2の確率分布として取得する第4のステップと、第4のステップにより各時刻t毎に取得された第2の確率分布に基づき、第2の確率分布の取得時刻tの直前の時刻t−1以前の第2の期間内の第2の確率分布の平均情報量を変化点指標として算出する第5のステップと、第5のステップにより算出された変化点指標を予め設定された閾値と比較し、閾値より大きな値の変化点指標に対応する時系列値を異常値として検出する第6のステップとを含むことを特徴とする。
【0015】
更に、上記の目的を達成するため、本発明の衛星測位システムの異常値検出プログラムは、コンピュータに、
衛星測位システムの異常値の検出対象である時系列値を第1の確率変数として、時系列値の重み付け統計量に基づき、所定の時刻以前の第1の期間における第1の確率密度関数を算出して第1の確率分布として取得する第1のステップと、第1の期間内の単位時刻である各時刻tについて第1のステップにより取得された第1の確率分布に基づき、時刻tの直前の時刻t−1における第1の確率変数の選択情報量を不確実性指標として算出する第2のステップと、時刻t以前の、第1の期間より短い第2の期間内で、第2のステップにより算出された不確実性指標の平均値を算出する第3のステップと、第3のステップで算出された平均値を第2の確率変数として、第2の確率変数の重み付け統計量に基づき、第1の期間における第2の確率密度関数を算出して第2の確率分布として取得する第4のステップと、第4のステップにより各時刻t毎に取得された第2の確率分布に基づき、第2の確率分布の取得時刻tの直前の時刻t−1以前の第2の期間内の第2の確率分布の平均情報量を変化点指標として算出する第5のステップと、第5のステップにより算出された変化点指標を予め設定された閾値と比較し、閾値より大きな値の変化点指標に対応する時系列値を異常値として検出する第6のステップとを実行させることを特徴とする。
【発明の効果】
【0016】
本発明によれば、時系列値を確率変数として第1の確率密度関数を取得し、その第1の確率密度関数から算出した選択情報量である不確実性指標の平均値を確率変数として第2の確率密度関数を算出し、更にその第2の確率密度関数の平均情報量である変化点指標を算出し、閾値より大きい変化点指標に対応する時系列値を異常値として検出するため、各データ間に時系列的な相関関係のある場合や、観測環境の変化が生じた場合であっても、精度の高い異常値の検出ができる。
【図面の簡単な説明】
【0017】
【図1】本発明の衛星測位システムの異常値検出装置の一実施形態のブロック図である。
【図2】図1中の動的モデル構成部の一実施形態のブロック図である。
【図3】本発明の衛星測位システムの異常値検出方法の一実施形態のフローチャートである。
【図4】時系列で観測される加速度値の時系列データに、意図的に混入される異常値の値と、その異常値を混入する時間の一例を示す図である。
【図5】図1の異常値検出装置による、図4に示した異常値が意図的に混入された加速度値の時系列データの異常値検出結果を示す図である。
【図6】本発明の衛星測位システムの異常検出装置が適用される地上型補強システム(GBAS)の一実施例のシステム構成図である。
【発明を実施するための形態】
【0018】
次に、本発明の実施形態について図面を参照して説明する。
【0019】
図1は、本発明になる衛星測位システムの異常値検出装置の一実施形態のブロック図を示す。同図に示すように、本実施形態の異常値検出装置10は、異常値指標算出部11、動的モデル構成部12及び異常値検出部13より構成され、入力される時系列データを監視し、衛星測位システムの異常値を検出する。
【0020】
異常値指標算出部11は、時系列データが入力され、その時系列データの各時刻における異常値指標を算出する。上記の時系列データは、衛星測位システムの各人工衛星と受信機との間の擬似距離や受信測位信号の位相などの、受信機において人工衛星からの測位信号に基づいて時系列に取得されたデータである。異常値指標とは、異常値の検出対象となる時系列値である。ここでは、異常値指標は、擬似距離又は位相の加速度等であり、検出したい異常に鋭敏に反応する値である。この異常値指標は、衛星測位システムの異常値の検出対象である本発明の時系列値に相当する。
【0021】
動的モデル構成部12は、一定期間において、異常値指標算出部11により時系列に求められた異常値指標から動的にモデルを構成する。また、動的モデル構成部12は、構成した動的モデルに基づいて、時系列の異常値指標から変化点指標を算出する。変化点指標は、突発的に増減した時系列値が存在する場合、その時系列値が単発的な動的モデルからの外れ値であるのか、それとも入力データの動的モデル自体が変化しているのかを判断する指標である。本実施形態において、この変化点指標は、動的モデル自体が変化している可能性が高いほど、高くなる値とされ、ある閾値より大きい変化点指標が算出された場合、その時刻を変化点として扱う。
【0022】
図2は、動的モデル構成部12の一実施形態のブロック図を示す。同図に示すように、動的モデル構成部12は、第1確率分布取得部121、不確実性指標算出部122、第2確率分布取得部123、及び変化点指標算出部124より構成される。
【0023】
第1確率分布取得部121は、衛星測位システムの異常値の検出対象である時系列値(すなわち、異常値指標)を第1の確率変数として、その異常値指標の重み付け統計量に基づき、所定の時刻以前の第1の期間における第1の確率密度関数を算出して、それを第1の確率分布として取得する。
【0024】
不確実性指標算出部122は、上記第1の期間内の単位時刻である各時刻tについて、第1確率分布取得部121により取得された第1の確率分布に基づき、時刻t−1に対応する第1の確率変数の選択情報量を不確実性指標として算出する。
【0025】
第2確率分布取得部123は、各時刻tについて、上記第1の期間よりも短い期間を第2の期間として、時刻t以前の第2の期間内で不確実性指標算出部122により算出された不確実性指標の平均値を算出し、その平均値を第2の確率変数として、第2の確率変数の重み付け統計量に基づき、上記第1の期間における第2の確率密度関数を算出して、それを第2の確率分布として取得する。
【0026】
変化点指標算出部124は、第2確率分布取得部123により各時刻t毎に取得された第2の確率分布に基づき、第2の確率分布の取得時刻tの直前の時刻t−1以前の第2の期間内の第2の確率分布(すなわち、第2の確率密度関数)の平均情報量を変化点指標として算出する。この変化点指標の算出において、動的モデル構成部12は、その計算のための母集団に時系列モデルを導入している。このため、動的モデル構成部12は、変化点指標の算出において、異常値指標の時系列な挙動を反映させることができる。
【0027】
図1に示す異常値検出部13は、動的モデル構成部12により各時刻t毎に算出された変化点指標を予め設定した閾値と比較し、変化点指標の値が閾値よりも大きければ、その時刻の変化点指標に対応する異常値指標(時系列値)を異常値として検出する。
【0028】
次に、図1及び図2に示した本実施形態の異常値検出装置10の動作について、図3のフローチャート等を併せ参照して詳細に説明する。
【0029】
まず、異常値検出装置10は、異常値指標算出部11により、入力された時系列データから各時刻の異常値指標を算出する(ステップS1)。続いて、異常値検出装置10は第1確率分布取得部121により、ステップS1で算出された異常値指標を第1の確率変数として、現時刻以前の所定の第1の期間T1の期間内における、その第1の確率変数の第1の確率密度関数p(xt)を次式により求める(ステップS2)。
【0030】
【数1】
【0031】
(1)式において、tは各異常値指標(第1の確率変数)が算出された時刻であり、xtは時刻tにおける異常値指標(第1の確率変数)の値である。また、(1)式において、w1t-1は、期間T1のうち、時刻t−1以前の期間における、異常値指標(第1の確率変数)xtの重み付け平均値である。この重み付け平均値w1t-1は、現時刻に近いほど大きな値になるように重み付けを行った異常値指標(第1の確率変数)xtの平均値である。更に、(1)式において、σ1t-1は、期間T1のうち、時刻t−1以前の期間における、異常値指標(第1の確率変数)xtの重み付け分散値である。この重み付け分散値σ1t-1は、現時刻に近いほど大きな値になるように重み付けを行った異常値指標(第1の確率変数)xtの分散値である。
【0032】
続いて、異常値検出装置10は、不確実性指標算出部122により、第1確率分布取得部121から入力される時刻t−1における第1の確率密度関数に基づいて、次式によりt=2以降の各時刻tにおける不確実性指標ULI(t)を算出する(ステップS3)。
【0033】
【数2】
【0034】
時刻tの不確実性指標ULI(t)は、(2)式から時刻tの直前の時刻t−1における異常値指標の選択情報量である。上記(2)式の右辺のpt-1(xt|xt-1)は、時刻t−1において(1)式から算出された第1の確率密度関数である。
【0035】
すなわち、このpt-1(xt|xt-1)は、xt-1(=x1,x2,・・・,xt-1;時刻1からt−1までのデータ)に基づいて推定したパラメータθt-1で表される確率密度分布である。つまり、pt-1(xt|xt-1)=pt-1(xt|θt-1)である。因みに、θt-1=(w1t-1,σ1t-1)である。この(2)式の右辺は、時刻t=2以降の各時刻tにおいて、時刻t−1における確率密度関数pt-1(xt|xt-1)の対数のマイナス値、すなわち選択情報量を算出することを意味する。
【0036】
次に、異常値検出装置10は、第2確率分布取得部123により、不確実性指標算出部122により算出された不確実性指標ULI(t)に基づき、次式により各時刻tについて、時刻t以前の期間T2における不確実性指標の平均値ytを算出する(ステップS4)。ここで、期間T2の長さは、期間T1より短く設定される。
【0037】
【数3】
【0038】
(3)式において、ULI(i)は、時刻iに対応する不確実性指標を示す。
【0039】
第2確率分布取得部123は、続いて、上記の不確実性指標の平均値ytを第2の確率変数として、次式に基づき時刻t以前の期間T3における確率変数の第2の確率密度関数q(yt)を算出する(ステップS5)。この第2の確率密度関数q(yt)は第2の確率分布として取得される。ここで、期間T3の長さは、期間T1以下に設定される。
【0040】
【数4】
【0041】
(4)式において、w2t-1は期間T3のうち、時刻t−1以前の期間における第2の確率変数(不確実性指標の平均値)ytの重み付け平均値である。この重み付け平均値w2t-1は、現時刻に近いほど値が大きくなるように重み付けを行ったytの平均値である。また、(4)式において、σ2t-1は期間T3のうち、時刻t−1以前の期間における第2の確率変数(不確実性指標の平均値)ytの重み付け分散値である。この重み付け分散値σ2t-1は、現時刻に近いほど値が大きくなるように重み付けを行ったytの分散値である。
【0042】
次に、異常値検出装置10は、変化点指標算出部124により、第2確率分布取得部123により算出された第2の確率密度関数に基づき、次式により各時刻tにおける変化点指標CPI(t)を算出する(ステップS6)。
【0043】
【数5】
【0044】
(5)式において、T4は時刻t−1以前の期間であり、また、qi-1(yi|yi-1)は時刻iにおける第2の確率密度関数(第2の確率分布)である。(5)式の右辺は、各時刻tにおいて、時刻t−1以前の期間T4の第2の確率密度関数qi-1(yi|yi-1)の対数のマイナス値の平均値、すなわち平均情報量を算出することを意味する。ここで、期間T4の長さは、期間T1より短く設定される。また、本実施形態では期間T4の長さは、期間T2以下に設定される。
【0045】
異常値検出装置10は、期間T2及びT4の長さが短いほど演算量が小さくなり、変化点指標を速く算出することができるが、異常値検出における誤検出率が高くなる。一方、期間T2及びT4の長さが長いほど演算量が多くなり、変化点指標の算出が遅くなるが、異常値検出装置10は、高い精度で異常値を検出することができる。従って、上記の期間T2及びT4の長さは、変化点指標の算出速度(これは異常値の検出速度に対応する)と異常値の検出精度とのバランスを考慮して定められる。
【0046】
最後に、異常値検出装置10は、異常値検出部13により、各時刻について変化点指標算出部124において算出された変化点指標と予め設定した閾値とを比較し、閾値より変化点指標の値が大きければその時刻の異常値指標を異常値として検出する(ステップS7)。
【0047】
なお、上記の期間T1及びT3は、本発明における第1の期間に相当し、上記の期間T2及びT4は、本発明における第2の期間に相当する。
【0048】
次に、図4及び図5を参照して、異常値検出装置10が異常値を検出した結果の一例について説明する。図4及び図5では、入力された位相の加速度を異常値指標とする。ここで、人工衛星の軌道運動による自然な加速度の変化分は事前に排除している。
【0049】
図4は、時系列で観測される加速度値の時系列データに、意図的に混入される異常値の値と、その異常値を混入する時間の一例を示す。同図において、縦軸は、意図的に混入される異常値の値を示し、横軸は、性能シミュレーションの開始時刻から経過した時間を示す。同図に斜線で示すように、異常値は、基準時から27時間経過した時点から28時間経過した時点までの期間において、徐々に大きな値となるように意図的に混入される。
【0050】
図5は、本実施形態の異常値検出装置10による、異常値が図4に示したように意図的に混入された加速度値の時系列データの異常値検出結果を示す。図5は、左側の縦軸が異常値指標を示し、右側の縦軸が変化点指標を示し、横軸が、加速度値の時系列データを取得した時間を示す。また、図5において、Iは本実施形態の異常値検出装置10による異常値変換指標の時間変化、IIは変化点指標の時間変化を示す。
【0051】
図5に示すように、本実施形態の異常値検出装置10は、丸で囲んだ期間IIIにおいて、閾値(例えば「1.5」)以上の比較的高い値の変化点指標を算出している。この期間IIIは基準時から27時間経過した時点であり、図4に示したように加速度値の時系列データに意図的に混入された異常値の混入時間と一致する。一方、図4に示したように、基準時から27時間経過するまでの期間と、28時間経過した後では、異常値は時系列データに混入されていないが、この期間において本実施形態の異常値検出装置10により得られる変化点指標は図5にIIで示すように閾値以下であり、異常値は検出されない。従って、本実施形態の異常値検出装置10によれば、時系列データに混入された異常値だけを精度良く検出できることが分かる。
【0052】
以上説明したように、本実施形態の異常値検出装置10は、時系列値を確率変数として、それぞれ現時刻に近いほど大きくなるように重み付けを行った重み付け平均値w1t-1及び重み付け分散値σ1t-1を用いることで、直近の観測環境に即した第1の確率密度関数を算出し、その第1の確率密度関数から選択情報量である不確実性指標を算出する。そして、異常値検出装置10は、更にその不確実性指標の平均値を確率変数として、それぞれ現時刻に近いほど大きくなるように重み付けを行った重み付け平均値w2t-1及び重み付け分散値σ2t-1を用いることで、直近の観測環境に即した第2の確率密度関数を算出し、その第2の確率密度関数から平均情報量である変化点指標を算出し、閾値より大きい変化点指標に対応する時系列値を異常値として検出する。
【0053】
これにより、異常値検出装置10は、第1の確率密度関数の算出では捉えられない時系列的な相関関係を、第2の確率密度関数の算出により捉えることができ、また、第1の確率密度関数の算出では捉えられない観測環境の変化を、第2の確率密度関数の算出により捉えることができる。このため、異常値検出装置10は、時系列的な相関関係のある場合や、観測環境の変化が生じた場合であっても、精度の高い異常値の検出ができる。
【実施例1】
【0054】
図6は、本発明になる異常検出装置が適用される地上型補強システム(GBAS)の一実施例のシステム構成図を示す。同図において、衛星測位システムである本実施例のGBASは、データ処理装置1と、VHF送信機30と、基準局41〜44と、GPSを構成する人工衛星(GPS衛星)51〜54と、GBASユーザ(航空機)60とから構成されている。
【0055】
データ処理装置1とVHF送信機30と基準局41〜44とはGBAS地上局を構成している。データ処理装置1は、上記の実施形態の異常値検出装置10を有し、またディファレンシャル補正処理部20を有する。
【0056】
基準局41〜44は、GPS衛星51〜54等から送信された測位信号を受信し、その受信信号であるGPS観測データをデータ処理装置1内のディファレンシャル補正処理部20へそれぞれ出力する。ディファレンシャル補正処理部20は、GPS観測データを基に異常値検出装置10の入力用に加工した統計情報量である時系列データを生成して異常値検出装置10へ供給する。
【0057】
異常値検出装置10は、前述した実施形態の動作を行い、異常値を検出した時には検出した異常値をディファレンシャル補正処理部20へ出力する。ディファレンシャル補正処理部20は、異常値が入力されると該当するGPS衛星又は基準局を使用禁止にする。異常値が入力されない場合は、すべてのGPS衛星51〜54や基準局41〜44の組み合わせにより、GPSによる航法の精度や安全性を向上させるためのGBAS補正データを公知の方法により生成してVHS受信機30へ供給する。VHS送信機30は、入力されたGBAS補正データで変調されたVHS信号を送信する。
【0058】
GBASユーザである航空機60は、GPS衛星51〜54から送信された測位信号を受信して位置情報を取得するGPS受信機と、VHS送信機30から送信されたGBAS補正データで変調されたVHS信号を受信する受信機(いずれも図示せず)を搭載している。航空機60は、GPS受信機の受信信号から取得した所定の情報と、VHS信号の受信機の受信信号から復調したGBAS補正データとを、公知の方法により着陸誘導等に用いることで、安全な航法を確保する。
【0059】
なお、本発明は以上の実施形態及び実施例に限定されるものではなく、例えば、上記実施形態の異常値検出装置10は、(1)式及び(4)式により計2回確率分布(確率密度関数)を求めているが、(4)式で算出された値を確率変数として、その確率変数の重み付け統計量に基づき更に確率密度関数を求め、その確率密度関数から変曲点指標を算出し、その変曲点指標と閾値との比較結果に基づいて、異常値を検知する構成としてもよい。
【0060】
また、本発明は図3のフローチャートの全部又は一部のステップをコンピュータである中央処理装置(CPU:Central Processing Unit)に実行させる異常値検出プログラムも包含する。この場合、異常値検出装置10は、処理装置と、主記憶装置と、本発明の異常値検出プログラムを記憶した記憶装置とを備え、処理装置と主記憶装置により上記の異常値検出プログラムを実行することにより、図3のフローチャートの全部又は一部のステップを実現する構成とする。ここで、上記の処理装置には異常値検出プログラムに従って処理を実行するCPUが設けられる。また、上記の主記憶装置は、図3のフローチャートで説明した処理に必要なデータ、処理装置による演算処理の過程で算出されるデータ及び演算処理の結果を保持する。
【0061】
更に、本発明は人工衛星からの測位信号を利用する衛星測位システムであれば、GBAS以外の公知の他の衛星測位システムにも適用可能である。
【0062】
以上の実施形態の一部又は全部は、以下の付記のようにも記載されうるが、以下には限られない。
【0063】
(付記1)
衛星測位システムの異常値の検出対象である時系列値を第1の確率変数として、前記時系列値の重み付け統計量に基づき、所定の時刻以前の第1の期間における第1の確率密度関数を算出して第1の確率分布として取得する第1確率分布取得手段と、
前記第1の期間内の単位時刻である各時刻tについて前記第1確率分布取得手段により取得された前記第1の確率分布に基づき、前記時刻tの直前の時刻t−1における前記第1の確率変数の選択情報量を不確実性指標として算出する不確実性指標算出手段と、
前記時刻t以前の、前記第1の期間より短い第2の期間内で、前記不確実性指標算出手段により算出された前記不確実性指標の平均値を算出し、その平均値を第2の確率変数として、前記第2の確率変数の重み付け統計量に基づき、前記第1の期間における第2の確率密度関数を算出して第2の確率分布として取得する第2確率分布取得手段と、
前記第2確率分布取得手段により各時刻t毎に取得された前記第2の確率分布に基づき、前記第2の確率分布の取得時刻tの直前の時刻t−1以前の前記第2の期間内の前記第2の確率分布の平均情報量を変化点指標として算出する変化点指標算出手段と、
前記変化点指標算出手段により算出された前記変化点指標を予め設定された閾値と比較し、前記閾値より大きな値の前記変化点指標に対応する前記時系列値を前記異常値として検出する異常値検出手段と
を有することを特徴とする衛星測位システムの異常値検出装置。
【0064】
(付記2)
前記第2確率分布取得手段は、前記第2の期間内で前記不確実性指標の平均値を算出し、その平均値を前記第2の確率変数として、前記第2の確率変数の重み付け統計量に基づき、前記第1の期間の長さ以下の期間である第3の期間における前記第2の確率密度関数を算出して前記第2の確率分布として取得し、
前記変化点指標算出手段は、前記時刻t−1に対応する前記第2の確率分布に基づき、前記時刻t−1以前で、前記第2の期間以下の長さである第4の期間内の前記第2の確率分布の平均情報量を前記変化点指標として算出する
ことを特徴とする付記1記載の衛星測位システムの異常値検出装置。
【0065】
(付記3)
前記時系列値は、衛星測位システムの各人工衛星と受信機との間の擬似距離や測位信号の位相などの、前記受信機において受信した前記人工衛星からの測位信号に基づいて時系列に取得されたデータであることを特徴とする付記1又は2記載の衛星測位システムの異常値検出装置。
【0066】
(付記4)
前記第1確率分布取得手段は、前記時刻tにおける前記第1の確率変数をxt、前記第1の期間のうち、前記時刻t−1以前の期間における、前記時系列値が新しいほど大きな値になるように重み付けを行った前記第1の確率変数xtの重み付け平均値をw1t-1、前記第1の期間のうち、前記時刻t−1以前の期間における、新しい時系列値ほど大きな値になるように重み付けを行った前記第1の確率変数xtの重み付け分散値をσ1t-1としたとき、次式
【0067】
【数6】
【0068】
により算出される前記第1の確率密度関数p(xt)を前記第1の確率分布として取得することを特徴とする付記1乃至3のうちいずれか一項記載の衛星測位システムの異常値検出装置。
【0069】
(付記5)
前記不確実性指標算出手段は、前記時刻tにおける前記第1の確率変数をxt、前記時刻t−1における前記第1の確率密度関数をpt-1(xt|xt-1)としたとき、次式
【0070】
【数7】
【0071】
により算出されるULI(t)を前記時刻tにおける前記不確実性指標として算出することを特徴とする付記1乃至4のうちいずれか一項記載の衛星測位システムの異常値検出装置。
【0072】
(付記6)
前記第2確率分布取得手段は、前記第2の期間をT2、時刻iに対応する前記不確実性指標をULI(i)としたとき、次式
【0073】
【数8】
【0074】
により、前記時刻t以前の前記第2の期間における前記不確実性指標の平均値である前記第2の確率変数ytを算出し、更に前記第1の期間のうち、前記時刻t−1以前の期間における、前記時系列値が新しいほど大きな値になるように重み付けを行った前記第2の確率変数ytの重み付け平均値をw2t-1、前記第1の期間のうち、前記時刻t−1以前の期間における、前記時系列値が新しいほど大きな値になるように重み付けを行った前記第2の確率変数ytの重み付け分散値をσ2t-1としたとき、次式
【0075】
【数9】
【0076】
により算出される前記第2の確率密度関数q(yt)を前記第2の確率分布として取得することを特徴とする付記1乃至5のうちいずれか一項記載の衛星測位システムの異常値検出装置。
【0077】
(付記7)
前記変化点指標算出手段は、前記時刻t−1以前の前記第4の期間をT4、前記時刻iにおける前記第2の確率密度関数をqi-1(yi|yi-1)としたとき、次式
【0078】
【数10】
【0079】
により算出されるCPI(t)を前記時刻tにおける前記変化点指標として算出することを特徴とする付記2又は6記載の衛星測位システムの異常値検出装置。
【0080】
(付記8)
前記第2確率分布取得手段により各時刻t毎に取得された前記第2の確率分布を確率変数として、その確率変数の重み付け統計量に基づき、第3の確率密度関数を算出する算出手段を更に有し、
前記変化点指標算出手段は、前記第3の確率密度関数から変曲点指標を算出し、前記異常値検出手段は、前記変曲点指標を予め設定された閾値と比較し、前記閾値より大きな値の前記変曲点指標に対応する前記時系列値を異常値として検出することを特徴とする付記1記載の衛星測位システムの異常値検出装置。
【0081】
(付記9)
衛星測位システムの異常値の検出対象である時系列値を第1の確率変数として、前記時系列値の重み付け統計量に基づき、所定の時刻以前の第1の期間における第1の確率密度関数を算出して第1の確率分布として取得する第1のステップと、
前記第1の期間内の単位時刻である各時刻tについて前記第1のステップにより取得された前記第1の確率分布に基づき、前記時刻tの直前の時刻t−1における前記第1の確率変数の選択情報量を不確実性指標として算出する第2のステップと、
前記時刻t以前の、前記第1の期間より短い第2の期間内で、前記第2のステップにより算出された前記不確実性指標の平均値を算出する第3のステップと、
前記第3のステップで算出された前記平均値を第2の確率変数として、前記第2の確率変数の重み付け統計量に基づき、前記第1の期間における第2の確率密度関数を算出して第2の確率分布として取得する第4のステップと、
前記第4のステップにより各時刻t毎に取得された前記第2の確率分布に基づき、前記第2の確率分布の取得時刻tの直前の時刻t−1以前の前記第2の期間内の前記第2の確率分布の平均情報量を変化点指標として算出する第5のステップと、
前記第5のステップにより算出された前記変化点指標を予め設定された閾値と比較し、前記閾値より大きな値の前記変化点指標に対応する前記時系列値を前記異常値として検出する第6のステップと
を含むことを特徴とする衛星測位システムの異常値検出方法。
【0082】
(付記10)
前記第4のステップは、前記平均値を前記第2の確率変数として、前記第2の確率変数の重み付け統計量に基づき、前記第1の期間の長さ以下の期間である第3の期間における前記第2の確率密度関数を算出して前記第2の確率分布として取得し、
前記第5のステップは、前記時刻t−1に対応する前記第2の確率分布に基づき、前記時刻t−1以前で、前記第2の期間以下の長さである第4の期間内の前記第2の確率分布の平均情報量を前記変化点指標として算出することを特徴とする付記9記載の衛星測位システムの異常値検出方法。
【0083】
(付記11)
前記時系列値は、衛星測位システムの各人工衛星と受信機との間の擬似距離や測位信号の位相などの、前記受信機において受信した前記人工衛星からの測位信号に基づいて時系列に取得されたデータであることを特徴とする付記9又は10記載の衛星測位システムの異常値検出方法。
【0084】
(付記12)
前記第1のステップは、前記時刻tにおける前記第1の確率変数をxt、前記第1の期間のうち、前記時刻t−1以前の期間における、前記時系列値が新しいほど大きな値になるように重み付けを行った前記第1の確率変数xtの重み付け平均値をw1t-1、前記第1の期間のうち、前記時刻t−1以前の期間における、新しい時系列値ほど大きな値になるように重み付けを行った前記第1の確率変数xtの重み付け分散値をσ1t-1としたとき、次式
【0085】
【数11】
【0086】
により算出される前記第1の確率密度関数p(xt)を前記第1の確率分布として取得することを特徴とする付記9乃至11のうちいずれか一項記載の衛星測位システムの異常値検出方法。
【0087】
(付記13)
前記第2のステップは、前記時刻tにおける前記第1の確率変数をxt、前記時刻t−1における前記第1の確率密度関数をpt-1(xt|xt-1)としたとき、次式
【0088】
【数12】
【0089】
により算出されるULI(t)を前記時刻tにおける前記不確実性指標として算出することを特徴とする付記9乃至12のうちいずれか一項記載の衛星測位システムの異常値検出方法。
【0090】
(付記14)
前記第3のステップは、前記第2の期間をT2、時刻iに対応する前記不確実性指標をULI(i)としたとき、次式
【0091】
【数13】
【0092】
により、前記時刻t以前の前記第2の期間における前記不確実性指標の平均値である前記第2の確率変数ytを算出することを特徴とする付記9乃至13のうちいずれか一項記載の衛星測位システムの異常値検出方法。
【0093】
(付記15)
前記第4のステップは、前記第1の期間のうち、前記時刻t−1以前の期間における、前記時系列値が新しいほど大きな値になるように重み付けを行った前記第2の確率変数ytの重み付け平均値をw2t-1、前記第1の期間のうち、前記時刻t−1以前の期間における、前記時系列値が新しいほど大きな値になるように重み付けを行った前記第2の確率変数ytの重み付け分散値をσ2t-1としたとき、次式
【0094】
【数14】
【0095】
により算出される前記第2の確率密度関数q(yt)を前記第2の確率分布として取得することを特徴とする付記14記載の衛星測位システムの異常値検出方法。
【0096】
(付記16)
前記第5のステップは、前記時刻t−1以前の前記第4の期間をT4、前記時刻iにおける前記第2の確率密度関数をqi-1(yi|yi-1)としたとき、次式
【0097】
【数15】
【0098】
により算出されるCPI(t)を前記時刻tにおける前記変化点指標として算出することを特徴とする付記10又は15記載の衛星測位システムの異常値検出方法。
【0099】
(付記17)
コンピュータに、
衛星測位システムの異常値の検出対象である時系列値を第1の確率変数として、前記時系列値の重み付け統計量に基づき、所定の時刻以前の第1の期間における第1の確率密度関数を算出して第1の確率分布として取得する第1のステップと、
前記第1の期間内の単位時刻である各時刻tについて前記第1のステップにより取得された前記第1の確率分布に基づき、前記時刻tの直前の時刻t−1における前記第1の確率変数の選択情報量を不確実性指標として算出する第2のステップと、
前記時刻t以前の、前記第1の期間より短い第2の期間内で、前記第2のステップにより算出された前記不確実性指標の平均値を算出する第3のステップと、
前記第3のステップで算出された前記平均値を第2の確率変数として、前記第2の確率変数の重み付け統計量に基づき、前記第1の期間における第2の確率密度関数を算出して第2の確率分布として取得する第4のステップと、
前記第4のステップにより各時刻t毎に取得された前記第2の確率分布に基づき、前記第2の確率分布の取得時刻tの直前の時刻t−1以前の前記第2の期間内の前記第2の確率分布の平均情報量を変化点指標として算出する第5のステップと、
前記第5のステップにより算出された前記変化点指標を予め設定された閾値と比較し、前記閾値より大きな値の前記変化点指標に対応する前記時系列値を前記異常値として検出する第6のステップと
を実行させることを特徴とする衛星測位システムの異常値検出プログラム。
【0100】
(付記18)
前記第4のステップは、前記平均値を前記第2の確率変数として、前記第2の確率変数の重み付け統計量に基づき、前記第1の期間の長さ以下の期間である第3の期間における前記第2の確率密度関数を算出して前記第2の確率分布として取得し、
前記第5のステップは、前記時刻t−1に対応する前記第2の確率分布に基づき、前記時刻t−1以前で、前記第2の期間以下の長さである第4の期間内の前記第2の確率分布の平均情報量を前記変化点指標として算出することを特徴とする付記17記載の衛星測位システムの異常値検出プログラム。
【0101】
(付記19)
前記時系列値は、衛星測位システムの各人工衛星と受信機との間の擬似距離や測位信号の位相などの、前記受信機において受信した前記人工衛星からの測位信号に基づいて時系列に取得されたデータであることを特徴とする付記17又は18記載の衛星測位システムの異常値検出プログラム。
【0102】
(付記20)
前記第1のステップは、前記時刻tにおける前記第1の確率変数をxt、前記第1の期間のうち、前記時刻t−1以前の期間における、前記時系列値が新しいほど大きな値になるように重み付けを行った前記第1の確率変数xtの重み付け平均値をw1t-1、前記第1の期間のうち、前記時刻t−1以前の期間における、新しい時系列値ほど大きな値になるように重み付けを行った前記第1の確率変数xtの重み付け分散値をσ1t-1としたとき、次式
【0103】
【数16】
【0104】
により算出される前記第1の確率密度関数p(xt)を前記第1の確率分布として取得することを特徴とする付記17乃至19のうちいずれか一項記載の衛星測位システムの異常値検出プログラム。
【0105】
(付記21)
前記第2のステップは、前記時刻tにおける前記第1の確率変数をxt、前記時刻t−1における前記第1の確率密度関数をpt-1(xt|xt-1)としたとき、次式
【0106】
【数17】
【0107】
により算出されるULI(t)を前記時刻tにおける前記不確実性指標として算出することを特徴とする付記17乃至20のうちいずれか一項記載の衛星測位システムの異常値検出プログラム。
【0108】
(付記22)
前記第3のステップは、前記第2の期間をT2、時刻iに対応する前記不確実性指標をULI(i)としたとき、次式
【0109】
【数18】
【0110】
により、前記時刻t以前の前記第2の期間における前記不確実性指標の平均値である前記第2の確率変数ytを算出することを特徴とする付記17乃至21のうちいずれか一項記載の衛星測位システムの異常値検出プログラム。
【0111】
(付記23)
前記第4のステップは、前記第1の期間のうち、前記時刻t−1以前の期間における、前記時系列値が新しいほど大きな値になるように重み付けを行った前記第2の確率変数ytの重み付け平均値をw2t-1、前記第1の期間のうち、前記時刻t−1以前の期間における、前記時系列値が新しいほど大きな値になるように重み付けを行った前記第2の確率変数ytの重み付け分散値をσ2t-1としたとき、次式
【0112】
【数19】
【0113】
により算出される前記第2の確率密度関数q(yt)を前記第2の確率分布として取得することを特徴とする付記22記載の衛星測位システムの異常値検出プログラム。
【0114】
(付記24)
前記第5のステップは、前記時刻t−1以前の前記第4の期間をT4、前記時刻iにおける前記第2の確率密度関数をqi-1(yi|yi-1)としたとき、次式
【0115】
【数20】
【0116】
により算出されるCPI(t)を前記時刻tにおける前記変化点指標として算出することを特徴とする付記18又は23記載の衛星測位システムの異常値検出プログラム。
【符号の説明】
【0117】
10 異常値検出装置
11 異常値指標算出部
12 動的モデル構成部
13 異常値検出部
121 第1確率分布取得部
122 不確実性指標算出部
123 第2確率分布取得部
124 変化点指標算出部
【特許請求の範囲】
【請求項1】
衛星測位システムの異常値の検出対象である時系列値を第1の確率変数として、前記時系列値の重み付け統計量に基づき、所定の時刻以前の第1の期間における第1の確率密度関数を算出して第1の確率分布として取得する第1確率分布取得手段と、
前記第1の期間内の単位時刻である各時刻tについて前記第1確率分布取得手段により取得された前記第1の確率分布に基づき、前記時刻tの直前の時刻t−1における前記第1の確率変数の選択情報量を不確実性指標として算出する不確実性指標算出手段と、
前記時刻t以前の、前記第1の期間より短い第2の期間内で、前記不確実性指標算出手段により算出された前記不確実性指標の平均値を算出し、その平均値を第2の確率変数として、前記第2の確率変数の重み付け統計量に基づき、前記第1の期間における第2の確率密度関数を算出して第2の確率分布として取得する第2確率分布取得手段と、
前記第2確率分布取得手段により各時刻t毎に取得された前記第2の確率分布に基づき、前記第2の確率分布の取得時刻tの直前の時刻t−1以前の前記第2の期間内の前記第2の確率分布の平均情報量を変化点指標として算出する変化点指標算出手段と、
前記変化点指標算出手段により算出された前記変化点指標を予め設定された閾値と比較し、前記閾値より大きな値の前記変化点指標に対応する前記時系列値を前記異常値として検出する異常値検出手段と
を有することを特徴とする衛星測位システムの異常値検出装置。
【請求項2】
前記第2確率分布取得手段は、前記第2の期間内で前記不確実性指標の平均値を算出し、その平均値を前記第2の確率変数として、前記第2の確率変数の重み付け統計量に基づき、前記第1の期間の長さ以下の期間である第3の期間における前記第2の確率密度関数を算出して前記第2の確率分布として取得し、
前記変化点指標算出手段は、前記時刻t−1に対応する前記第2の確率分布に基づき、前記時刻t−1以前で、前記第2の期間以下の長さである第4の期間内の前記第2の確率分布の平均情報量を前記変化点指標として算出する
ことを特徴とする請求項1記載の衛星測位システムの異常値検出装置。
【請求項3】
前記時系列値は、衛星測位システムの各人工衛星と受信機との間の擬似距離や測位信号の位相などの、前記受信機において受信した前記人工衛星からの測位信号に基づいて時系列に取得されたデータであることを特徴とする請求項1又は2記載の衛星測位システムの異常値検出装置。
【請求項4】
前記第1確率分布取得手段は、前記時刻tにおける前記第1の確率変数をxt、前記第1の期間のうち、前記時刻t−1以前の期間における、前記時系列値が新しいほど大きな値になるように重み付けを行った前記第1の確率変数xtの重み付け平均値をw1t-1、前記第1の期間のうち、前記時刻t−1以前の期間における、新しい時系列値ほど大きな値になるように重み付けを行った前記第1の確率変数xtの重み付け分散値をσ1t-1としたとき、次式
【数1】
により算出される前記第1の確率密度関数p(xt)を前記第1の確率分布として取得することを特徴とする請求項1乃至3のうちいずれか一項記載の衛星測位システムの異常値検出装置。
【請求項5】
前記不確実性指標算出手段は、前記時刻tにおける前記第1の確率変数をxt、前記時刻t−1における前記第1の確率密度関数をpt-1(xt|xt-1)としたとき、次式
【数2】
により算出されるULI(t)を前記時刻tにおける前記不確実性指標として算出することを特徴とする請求項1乃至4のうちいずれか一項記載の衛星測位システムの異常値検出装置。
【請求項6】
前記第2確率分布取得手段は、前記第2の期間をT2、時刻iに対応する前記不確実性指標をULI(i)としたとき、次式
【数3】
により、前記時刻t以前の前記第2の期間における前記不確実性指標の平均値である前記第2の確率変数ytを算出し、更に前記第1の期間のうち、前記時刻t−1以前の期間における、前記時系列値が新しいほど大きな値になるように重み付けを行った前記第2の確率変数ytの重み付け平均値をw2t-1、前記第1の期間のうち、前記時刻t−1以前の期間における、前記時系列値が新しいほど大きな値になるように重み付けを行った前記第2の確率変数ytの重み付け分散値をσ2t-1としたとき、次式
【数4】
により算出される前記第2の確率密度関数q(yt)を前記第2の確率分布として取得することを特徴とする請求項1乃至5のうちいずれか一項記載の衛星測位システムの異常値検出装置。
【請求項7】
前記変化点指標算出手段は、前記時刻t−1以前の前記第4の期間をT4、前記時刻iにおける前記第2の確率密度関数をqi-1(yi|yi-1)としたとき、次式
【数5】
により算出されるCPI(t)を前記時刻tにおける前記変化点指標として算出することを特徴とする請求項2又は6記載の衛星測位システムの異常値検出装置。
【請求項8】
衛星測位システムの異常値の検出対象である時系列値を第1の確率変数として、前記時系列値の重み付け統計量に基づき、所定の時刻以前の第1の期間における第1の確率密度関数を算出して第1の確率分布として取得する第1のステップと、
前記第1の期間内の単位時刻である各時刻tについて前記第1のステップにより取得された前記第1の確率分布に基づき、前記時刻tの直前の時刻t−1における前記第1の確率変数の選択情報量を不確実性指標として算出する第2のステップと、
前記時刻t以前の、前記第1の期間より短い第2の期間内で、前記第2のステップにより算出された前記不確実性指標の平均値を算出する第3のステップと、
前記第3のステップで算出された前記平均値を第2の確率変数として、前記第2の確率変数の重み付け統計量に基づき、前記第1の期間における第2の確率密度関数を算出して第2の確率分布として取得する第4のステップと、
前記第4のステップにより各時刻t毎に取得された前記第2の確率分布に基づき、前記第2の確率分布の取得時刻tの直前の時刻t−1以前の前記第2の期間内の前記第2の確率分布の平均情報量を変化点指標として算出する第5のステップと、
前記第5のステップにより算出された前記変化点指標を予め設定された閾値と比較し、前記閾値より大きな値の前記変化点指標に対応する前記時系列値を前記異常値として検出する第6のステップと
を含むことを特徴とする衛星測位システムの異常値検出方法。
【請求項9】
前記第4のステップは、前記平均値を前記第2の確率変数として、前記第2の確率変数の重み付け統計量に基づき、前記第1の期間の長さ以下の期間である第3の期間における前記第2の確率密度関数を算出して前記第2の確率分布として取得し、
前記第5のステップは、前記時刻t−1に対応する前記第2の確率分布に基づき、前記時刻t−1以前で、前記第2の期間以下の長さである第4の期間内の前記第2の確率分布の平均情報量を前記変化点指標として算出することを特徴とする請求項8記載の衛星測位システムの異常値検出方法。
【請求項10】
コンピュータに、
衛星測位システムの異常値の検出対象である時系列値を第1の確率変数として、前記時系列値の重み付け統計量に基づき、所定の時刻以前の第1の期間における第1の確率密度関数を算出して第1の確率分布として取得する第1のステップと、
前記第1の期間内の単位時刻である各時刻tについて前記第1のステップにより取得された前記第1の確率分布に基づき、前記時刻tの直前の時刻t−1における前記第1の確率変数の選択情報量を不確実性指標として算出する第2のステップと、
前記時刻t以前の、前記第1の期間より短い第2の期間内で、前記第2のステップにより算出された前記不確実性指標の平均値を算出する第3のステップと、
前記第3のステップで算出された前記平均値を第2の確率変数として、前記第2の確率変数の重み付け統計量に基づき、前記第1の期間における第2の確率密度関数を算出して第2の確率分布として取得する第4のステップと、
前記第4のステップにより各時刻t毎に取得された前記第2の確率分布に基づき、前記第2の確率分布の取得時刻tの直前の時刻t−1以前の前記第2の期間内の前記第2の確率分布の平均情報量を変化点指標として算出する第5のステップと、
前記第5のステップにより算出された前記変化点指標を予め設定された閾値と比較し、前記閾値より大きな値の前記変化点指標に対応する前記時系列値を前記異常値として検出する第6のステップと
を実行させることを特徴とする衛星測位システムの異常値検出プログラム。
【請求項1】
衛星測位システムの異常値の検出対象である時系列値を第1の確率変数として、前記時系列値の重み付け統計量に基づき、所定の時刻以前の第1の期間における第1の確率密度関数を算出して第1の確率分布として取得する第1確率分布取得手段と、
前記第1の期間内の単位時刻である各時刻tについて前記第1確率分布取得手段により取得された前記第1の確率分布に基づき、前記時刻tの直前の時刻t−1における前記第1の確率変数の選択情報量を不確実性指標として算出する不確実性指標算出手段と、
前記時刻t以前の、前記第1の期間より短い第2の期間内で、前記不確実性指標算出手段により算出された前記不確実性指標の平均値を算出し、その平均値を第2の確率変数として、前記第2の確率変数の重み付け統計量に基づき、前記第1の期間における第2の確率密度関数を算出して第2の確率分布として取得する第2確率分布取得手段と、
前記第2確率分布取得手段により各時刻t毎に取得された前記第2の確率分布に基づき、前記第2の確率分布の取得時刻tの直前の時刻t−1以前の前記第2の期間内の前記第2の確率分布の平均情報量を変化点指標として算出する変化点指標算出手段と、
前記変化点指標算出手段により算出された前記変化点指標を予め設定された閾値と比較し、前記閾値より大きな値の前記変化点指標に対応する前記時系列値を前記異常値として検出する異常値検出手段と
を有することを特徴とする衛星測位システムの異常値検出装置。
【請求項2】
前記第2確率分布取得手段は、前記第2の期間内で前記不確実性指標の平均値を算出し、その平均値を前記第2の確率変数として、前記第2の確率変数の重み付け統計量に基づき、前記第1の期間の長さ以下の期間である第3の期間における前記第2の確率密度関数を算出して前記第2の確率分布として取得し、
前記変化点指標算出手段は、前記時刻t−1に対応する前記第2の確率分布に基づき、前記時刻t−1以前で、前記第2の期間以下の長さである第4の期間内の前記第2の確率分布の平均情報量を前記変化点指標として算出する
ことを特徴とする請求項1記載の衛星測位システムの異常値検出装置。
【請求項3】
前記時系列値は、衛星測位システムの各人工衛星と受信機との間の擬似距離や測位信号の位相などの、前記受信機において受信した前記人工衛星からの測位信号に基づいて時系列に取得されたデータであることを特徴とする請求項1又は2記載の衛星測位システムの異常値検出装置。
【請求項4】
前記第1確率分布取得手段は、前記時刻tにおける前記第1の確率変数をxt、前記第1の期間のうち、前記時刻t−1以前の期間における、前記時系列値が新しいほど大きな値になるように重み付けを行った前記第1の確率変数xtの重み付け平均値をw1t-1、前記第1の期間のうち、前記時刻t−1以前の期間における、新しい時系列値ほど大きな値になるように重み付けを行った前記第1の確率変数xtの重み付け分散値をσ1t-1としたとき、次式
【数1】
により算出される前記第1の確率密度関数p(xt)を前記第1の確率分布として取得することを特徴とする請求項1乃至3のうちいずれか一項記載の衛星測位システムの異常値検出装置。
【請求項5】
前記不確実性指標算出手段は、前記時刻tにおける前記第1の確率変数をxt、前記時刻t−1における前記第1の確率密度関数をpt-1(xt|xt-1)としたとき、次式
【数2】
により算出されるULI(t)を前記時刻tにおける前記不確実性指標として算出することを特徴とする請求項1乃至4のうちいずれか一項記載の衛星測位システムの異常値検出装置。
【請求項6】
前記第2確率分布取得手段は、前記第2の期間をT2、時刻iに対応する前記不確実性指標をULI(i)としたとき、次式
【数3】
により、前記時刻t以前の前記第2の期間における前記不確実性指標の平均値である前記第2の確率変数ytを算出し、更に前記第1の期間のうち、前記時刻t−1以前の期間における、前記時系列値が新しいほど大きな値になるように重み付けを行った前記第2の確率変数ytの重み付け平均値をw2t-1、前記第1の期間のうち、前記時刻t−1以前の期間における、前記時系列値が新しいほど大きな値になるように重み付けを行った前記第2の確率変数ytの重み付け分散値をσ2t-1としたとき、次式
【数4】
により算出される前記第2の確率密度関数q(yt)を前記第2の確率分布として取得することを特徴とする請求項1乃至5のうちいずれか一項記載の衛星測位システムの異常値検出装置。
【請求項7】
前記変化点指標算出手段は、前記時刻t−1以前の前記第4の期間をT4、前記時刻iにおける前記第2の確率密度関数をqi-1(yi|yi-1)としたとき、次式
【数5】
により算出されるCPI(t)を前記時刻tにおける前記変化点指標として算出することを特徴とする請求項2又は6記載の衛星測位システムの異常値検出装置。
【請求項8】
衛星測位システムの異常値の検出対象である時系列値を第1の確率変数として、前記時系列値の重み付け統計量に基づき、所定の時刻以前の第1の期間における第1の確率密度関数を算出して第1の確率分布として取得する第1のステップと、
前記第1の期間内の単位時刻である各時刻tについて前記第1のステップにより取得された前記第1の確率分布に基づき、前記時刻tの直前の時刻t−1における前記第1の確率変数の選択情報量を不確実性指標として算出する第2のステップと、
前記時刻t以前の、前記第1の期間より短い第2の期間内で、前記第2のステップにより算出された前記不確実性指標の平均値を算出する第3のステップと、
前記第3のステップで算出された前記平均値を第2の確率変数として、前記第2の確率変数の重み付け統計量に基づき、前記第1の期間における第2の確率密度関数を算出して第2の確率分布として取得する第4のステップと、
前記第4のステップにより各時刻t毎に取得された前記第2の確率分布に基づき、前記第2の確率分布の取得時刻tの直前の時刻t−1以前の前記第2の期間内の前記第2の確率分布の平均情報量を変化点指標として算出する第5のステップと、
前記第5のステップにより算出された前記変化点指標を予め設定された閾値と比較し、前記閾値より大きな値の前記変化点指標に対応する前記時系列値を前記異常値として検出する第6のステップと
を含むことを特徴とする衛星測位システムの異常値検出方法。
【請求項9】
前記第4のステップは、前記平均値を前記第2の確率変数として、前記第2の確率変数の重み付け統計量に基づき、前記第1の期間の長さ以下の期間である第3の期間における前記第2の確率密度関数を算出して前記第2の確率分布として取得し、
前記第5のステップは、前記時刻t−1に対応する前記第2の確率分布に基づき、前記時刻t−1以前で、前記第2の期間以下の長さである第4の期間内の前記第2の確率分布の平均情報量を前記変化点指標として算出することを特徴とする請求項8記載の衛星測位システムの異常値検出方法。
【請求項10】
コンピュータに、
衛星測位システムの異常値の検出対象である時系列値を第1の確率変数として、前記時系列値の重み付け統計量に基づき、所定の時刻以前の第1の期間における第1の確率密度関数を算出して第1の確率分布として取得する第1のステップと、
前記第1の期間内の単位時刻である各時刻tについて前記第1のステップにより取得された前記第1の確率分布に基づき、前記時刻tの直前の時刻t−1における前記第1の確率変数の選択情報量を不確実性指標として算出する第2のステップと、
前記時刻t以前の、前記第1の期間より短い第2の期間内で、前記第2のステップにより算出された前記不確実性指標の平均値を算出する第3のステップと、
前記第3のステップで算出された前記平均値を第2の確率変数として、前記第2の確率変数の重み付け統計量に基づき、前記第1の期間における第2の確率密度関数を算出して第2の確率分布として取得する第4のステップと、
前記第4のステップにより各時刻t毎に取得された前記第2の確率分布に基づき、前記第2の確率分布の取得時刻tの直前の時刻t−1以前の前記第2の期間内の前記第2の確率分布の平均情報量を変化点指標として算出する第5のステップと、
前記第5のステップにより算出された前記変化点指標を予め設定された閾値と比較し、前記閾値より大きな値の前記変化点指標に対応する前記時系列値を前記異常値として検出する第6のステップと
を実行させることを特徴とする衛星測位システムの異常値検出プログラム。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2011−196738(P2011−196738A)
【公開日】平成23年10月6日(2011.10.6)
【国際特許分類】
【出願番号】特願2010−61878(P2010−61878)
【出願日】平成22年3月18日(2010.3.18)
【出願人】(000004237)日本電気株式会社 (19,353)
【出願人】(000232221)日本電気航空宇宙システム株式会社 (14)
【Fターム(参考)】
【公開日】平成23年10月6日(2011.10.6)
【国際特許分類】
【出願日】平成22年3月18日(2010.3.18)
【出願人】(000004237)日本電気株式会社 (19,353)
【出願人】(000232221)日本電気航空宇宙システム株式会社 (14)
【Fターム(参考)】
[ Back to top ]