
衛星測位システム及び測位信号受信機
【課題】TTFF短縮と測位精度向上とを両立させた測位信号受信機及び衛星測位システムを提供する。
【解決手段】全地球測位システムと、衛星軌道情報を有する測位信号受信装置と、衛星軌道情報を有さない測位信号受信装置と、初期位置算出支援情報を提供する初期位置算出支援情報生成装置と、前記初期位置算出支援情報を送信するQZSとからなる衛星測位システムであって、初期位置算出支援情報生成装置からは、クロック情報と衛星軌道情報とが前記QZSのL1−SAIF信号に重畳されて前記衛星軌道情報を有する測位信号受信装置及び前記衛星軌道情報を有さない測位信号受信装置に送信される。
ことを特徴とする。
【解決手段】全地球測位システムと、衛星軌道情報を有する測位信号受信装置と、衛星軌道情報を有さない測位信号受信装置と、初期位置算出支援情報を提供する初期位置算出支援情報生成装置と、前記初期位置算出支援情報を送信するQZSとからなる衛星測位システムであって、初期位置算出支援情報生成装置からは、クロック情報と衛星軌道情報とが前記QZSのL1−SAIF信号に重畳されて前記衛星軌道情報を有する測位信号受信装置及び前記衛星軌道情報を有さない測位信号受信装置に送信される。
ことを特徴とする。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、広く全地球測位システム(GPS)に代表される衛星測位システムから送信される測位信号による位置決定技術に関し、より具体的には、測位信号受信機の起動から位置を決定するまでの時間を短縮化する技術に関する。
【背景技術】
【0002】
従来、衛星測位システムによる位置決定においては、測位衛星から送信される電波を地上の受信機で受信し、衛星から受信機までの電波伝搬時間にもとづいて衛星と受信機との間の距離を計測する。
【0003】
測位衛星から送信される電波には、エフェメリスと呼ばれる測位衛星自身の位置を示す軌道情報と、衛星自身の時刻のズレを意味するクロック情報とが航法データとして重畳される。航法データにはアルマナックと呼ばれるこれらについての全衛星分の概略値も含まれている。これらは50bpsで伝送され、エフェメリスから軌道およびクロックを復調するのには少なくとも30秒を必要とする。
【0004】
一方で、日本において開発されている衛星測位システムとして準天頂衛星システム(QZSS)がある。QZSSは、上述の50bpsの測位信号に加え、250bpsのL1−SAIF信号と呼ばれる補強信号を有する。このL1−SAIF信号の仕様は、IS−QZSS(非特許文献1)において定義され、そのフォーマットはSBAS方式に準拠している。L1−SAIFやSBASでは、主に測位精度を改善するための情報が送信される。
【0005】
そして、衛星測位システムにおける受信機による位置決定にはエフェメリスが必要であるため、受信機が動作を開始してから最初の位置決定を行うまでの時間、即ち初期位置算出時間(TTFF:Time To First Fix)は、少なくともエフェメリスの伝送時間である30秒が必要とされる。TTFFは、ユーザの利便性に直結するものであるため、潜在的に短縮化が求められている。
【0006】
このようなTTFFを短縮化する手法の一例として、特許文献1に示すような、基準となるアルマナックを保持している受信機に対し、エフェメリスとアルマナックとにもとづいて算出した衛星位置と衛星クロックとの差分情報を伝送することにより、受信機はエフェメリスを使用せずに測位を可能とする方式(以下、これを「差分方式」と呼ぶ)がある。
【0007】
そして、特許文献1に示す技術の実装について、SBASやL1−SAIFのメッセージフォーマットを用いた場合の検討が行われている(非特許文献2)。
【0008】
非特許文献2における検討によると、同文献に開示されたビット割り当てを用いることにより、GPSの5衛星分のTTFF短縮に特化した情報の伝送が1メッセージで可能となっている。これにより、性能は、エフェメリスを用いた測位に対し、衛星位置の劣化の程度が10〜15秒程度にわたり10m程度以内とされている。なお、10秒に一度、10衛星分の差分情報を伝送しようとした場合の帯域利用率は、20.0%である。
【0009】
この差分方式を用いるためには、別途、差分の基準とするアルマナック(以下、基準情報という)の伝送も必要とされる。受信機は、測位の前に基準情報を不揮発性メモリに格納しておき、差分情報受信時にこれを使用する。この基準情報は、差分情報の差分値が時間の経過と共に大きくなる性質のものであるため、差分情報の表現可能範囲を超えないうちに一定期間毎に更新する必要がある。また、受信機がいつこのデータを受信するかは、送信システム側は知り得ないので定常的にこれを伝送する必要がある。
【0010】
さらに、GPS32衛星分の基準情報を8分で伝送しようとした場合の帯域利用率は、6.7%である。
【0011】
なお、非特許文献2で対象としている衛星はGPS衛星であり、準天頂衛星に対応させようとした場合、差分情報を伝送する空き領域がないため衛星数もしくは精度を落とす必要がある。
【0012】
一方で、1ヶ月に一度程度の頻度でアシスト情報を外部から与える事が可能な場合には、受信機において衛星の軌道情報の長期間の推定が可能となるのでクロック情報のみを伝送するという手法(以下、クロック方式という)も考えられる。クロック方式におけるメッセージフォーマット例としては、図7に示すフォーマットが考えられるが、この場合には1メッセージでGPS衛星と準天頂衛星について10衛星分の情報を載せることができ、10秒に一度10衛星分の差分情報を伝送しようとした場合の帯域利用率は10.0%となる。
【0013】
上述の差分方式とクロック方式との相違点はその機能である。端的に言えば、差分方式は、外部からアシスト情報を得ることがない受信機に対して有効であり、クロック方式は、外部からアシスト情報を得ることがある受信機に対して有効である。そして、送信システムとしては、幅広い受信機層に対応することが望ましいが、これら2種類の受信機に向けて、上述した条件でデータを伝送しようとした場合の帯域利用率は、20.0%+6.7%+10.0%=36.7%である。
【先行技術文献】
【特許文献】
【0014】
【特許文献1】特開2008−145363号公報
【非特許文献】
【0015】
【非特許文献1】宇宙航空研究開発機構:”準天頂衛星システムユーザインタフェース仕様書(IS−QZSS)1.1版”、2009年7月31日、インターネット<URL:http://qzss.jaxa.jp/is-qzss/>
【非特許文献2】坂井丈泰 「GPS初期位置算出時間(TTFF)短縮のための軌道情報伝送方法」 電子情報通信学会論文誌 B Vol.J83−A No.4 pp.479−486 2008年4月
【発明の概要】
【発明が解決しようとする課題】
【0016】
しかしながら、L1−SAIF信号については、測位精度を向上させるための情報伝送も必要であり、この性能を維持するためには、測位精度向上のための情報の伝送頻度はできるだけ高くすることが望ましい。
【0017】
また、衛星軌道情報を有する測位信号受信機に対しても衛星軌道情報を有さない測位信号受信機に対しても有効な初期位置算出時間短縮手段の提供が望まれる。
【0018】
そこで、本発明は、全地球測位システム(GPS)に代表される衛星測位システムより送信される測位信号に基づいて位置を決定するシステム等において、上述の課題を克服する衛星測位システム及び測位信号受信機等を提供する。
【課題を解決するための手段】
【0019】
本発明は、全地球測位システムと、衛星軌道情報を有する測位信号受信装置と、衛星軌道情報を有さない測位信号受信装置と、初期位置算出支援情報を提供する初期位置算出支援情報生成装置と、前記初期位置算出支援情報を送信するQZSとからなる衛星測位システムであって、初期位置算出支援情報生成装置からは、クロック情報と衛星軌道情報とが前記QZSのL1−SAIF信号に重畳されて前記衛星軌道情報を有する測位信号受信装置及び前記衛星軌道情報を有さない測位信号受信装置に送信されることを特徴とする。
【0020】
また、本発明は、前記衛星軌道情報を有する測位信号受信装置では、前記全地球測位システム/QZSと前記衛星軌道情報を有する測位信号受信装置との距離計測値と、前記衛星軌道情報を有する測位信号受信装置が有する衛星軌道情報と、前記クロック情報とを用いて前記衛星軌道情報を有する測位信号受信装置の位置を決定し、前記衛星軌道情報を有さない測位信号受信装置では、前記全地球測位システムGPS/QZSと前記衛星軌道情報を有さない測位信号受信装置との距離計測値、受信したクロック情報、及び衛星軌道情報を用いて前記衛星軌道情報を有さない測位信号受信装置の位置を決定することを特徴とする。
【発明の効果】
【0021】
本発明によれば、全地球測位システム(GPS)に代表される衛星測位システムより送信される測位信号に基づいて位置を決定するシステム等において、測位精度向上のための情報の伝送頻度はできるだけ高く維持したうえで、衛星軌道情報を有する測位信号受信機に対しても衛星軌道情報を有さない測位信号受信機に対しても、起動から位置決定までの時間を有意に短縮化することができる。
【図面の簡単な説明】
【0022】
【図1】本発明にかかる衛星測位システムの一実施形態におけるシステム構成例を説明する説明図である。
【図2】本発明にかかる衛星測位システムの一実施形態における衛星軌道情報のビットアサインフォーマットの具体例を説明する説明図である。
【図3】本発明にかかる衛星測位システムの一実施形態におけるGPSインジケータ及びQZSインジケータの例を示す図である。
【図4】従来方式と本発明にかかる衛星測位システムの一実施形態の送信パターンの相違を説明する説明図である。
【図5】本発明にかかる衛星測位システムの一実施形態における差分方式を必要とする受信機の基準情報の蓄積の流れを示したフローチャートを示す。
【図6】本発明にかかる衛星測位システムの他の実施形態におけるシステム構成例を説明する説明図である。
【図7】本発明が想定するクロック方式のメッセージフォーマット例である。
【発明を実施するための形態】
【0023】
以下、本発明にかかる衛星測位システム及び測位信号受信機を実施するための形態について詳述する。
【0024】
図1に、本発明にかかる衛星測位システムの一実施形態におけるシステム構成例を示す。
【0025】
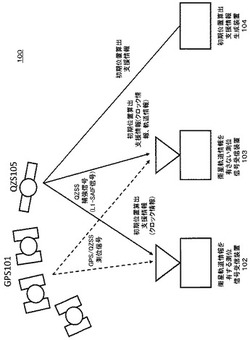
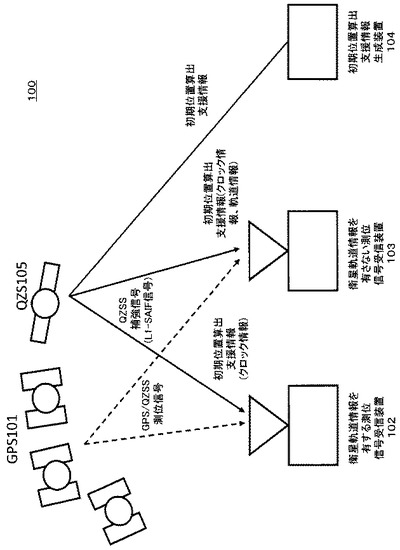
衛星測位システム100は、全地球測位システム(GPS)101と、衛星軌道情報を有する測位信号受信装置102と、衛星軌道情報を有さない測位信号受信装置103と、初期位置算出支援情報を提供する装置104と、初期位置算出支援情報を送信するQZS105と、からなる。
【0026】
初期位置算出支援情報生成装置104からは、クロック情報と衛星軌道情報とが、250bpsのデータレートを有するQZSのL1−SAIF信号に重畳されて衛星軌道情報を有する測位信号受信装置102、及び衛星軌道情報を有さない測位信号受信装置103に送信される。衛星軌道情報を有する測位信号受信装置102では、GPS/QZSと測位信号受信装置との距離計測値、自身が有する衛星軌道情報、及び受信したクロック情報を用いて自身の位置を決定する。衛星軌道情報を有さない測位信号受信装置103ではGPS/QZSと測位信号受信装置との距離計測値、受信したクロック情報、及び衛星軌道情報を用いて自身の位置を決定する。
【0027】
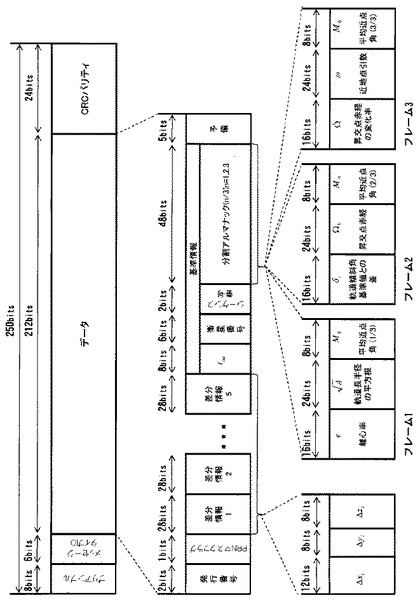
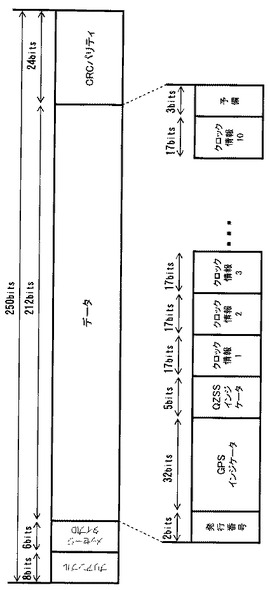
図2に、本願発明の衛星軌道情報の具体的なビットアサインフォーマットを示す。本フォーマットは250bitを1メッセージとして扱う。一実施形態として、1メッセージに8bitのプリアンブルと、6bitのメッセージタイプIDと、212ビットのデータと、24bitのCRCパリティとからなる。
【0028】
また、上記212ビットのデータは、2ビットの発行番号と、1ビットのPRNマスクフラグと、140ビットの差分情報と、64ビットの基準情報と、5ビットの予備領域とからなる。
【0029】
発行番号は、この軌道情報が送信される直近前に送信されたクロック情報の発行番号と同期して同一の番号である。クロック情報の示すGPSインジケータ、QZSSインジケータの値が変更されたときに、1ずつカウントアップする。なお、11(Bin)の次は00(Bin)とする。
【0030】
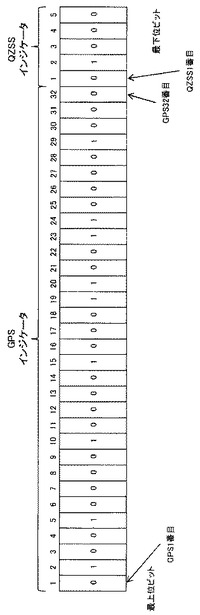
PRNマスクフラグは、差分情報がクロック情報の10衛星のうち、1〜5番目についての情報か、あるいは6〜10番目の情報かを識別するためのものである。例えば、図3に示すように、GPSインジケータの最上位ビットから2、5、10、15、19、20、23、24、29番目のビット、及びQZSSインジケータの最上位ビットから2番目のビットが"1"の場合、PRNマスクフラグが0であれば、差分情報にはGPSの2、5、10、15、19番衛星が含まれることを意味し、PRNマスクフラグが1であれば、差分情報にはGPSの20、23、24、29番衛星、QZSSの2番衛星が含まれることを意味する。この様に衛星情報としてクロック情報を参照することで、例えば、非特許文献2の差分情報から衛星識別のための情報であるPRNi−1およびΔPRNi−1を取り除くことができる。また、準天頂衛星への対応にも支障がない。
【0031】
140ビットの差分情報は、一例として非特許文献2の差分情報で規定されているΔxi、Δyi、Δziの28ビットを1衛星とし、5衛星分を記載する。クロックに関してはクロック情報を参照することとし、クロックの差分であるΔBiについては取り除くことが出来る。
【0032】
64ビットの基準情報は、GPS、QZSSのアルマナックデータを用いるデータであり、8bitのt0a、6bitの衛星番号、2bitのシーケンス番号、48ビットの分割アルマナックからなる。
ここで、t0aはGPS、QZSSで用いられている衛星番号に対応したアルマナックデータのt0aである。送信システムが基準情報を更新すると、この値が変化することになる。例えば、非特許文献2において定義されていたIODAはこのようにt0aで代用できるため、取り除くことができる。
【0033】
衛星番号は、最上位ビットが0の時はGPSを意味しており、下位5ビットに1を加算した値がGPSのPRN番号である。また、最上位ビットが1の時はQZSSを意味しており下位5ビットに193を加算した値がQZSのPRN番号である。
【0034】
分割アルマナックは、1〜3の3フレームで構成され、フレームはシーケンス番号で識別される。シーケンス番号が0の時が1フレーム目、1の時が2フレーム目、2の時が3フレーム目の定義で送信される。分割アルマナックには1フレーム目に16ビットの離心率e、24ビットの軌道長半径の平方根

、8ビットの平均近点角M0の上位1/3が、2フレーム目に16ビットの軌道傾斜角の基準値との差δi、24ビットの昇交点赤径Ω0、8ビットの平均近点角M0の中間1/3が、3フレーム目に16ビットの昇交点赤径の変化率
、24ビットの近地点引数ω、8ビットの平均近点角M0の下位1/3が定義される。af0、及びaf1は、は、クロック補正に関するパラメータなので、基準情報から取り除くことができる。
【0035】
差分による衛星位置の表現範囲を超えた衛星が存在した場合、差分情報でそれが無効であることを示す必要がある。そのような衛星のΔxiには800(HEX)、ΔyiとΔziには80(HEX)と負の最大値を設定することにする。
【0036】
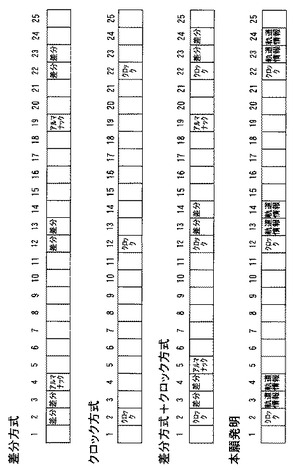
図4に、従来方式と本願発明との送信パターンの違いを示す。クロック情報は、10衛星分の情報を格納するのに対し差分情報は5衛星分であるので、クロック情報1メッセージに差分情報2メッセージを対応させる構成とする。本願発明により、基準情報を別途送信する必要がなくなり、伝送するデータ量を削減することができる。
【0037】
クロック方式を必要とする受信機は、クロック情報を受信する。ここに含まれる衛星のうち、4衛星分の測位信号を受信できた時点で初期位置の算出を行える。
差分方式を必要とする受信機は、まずクロック情報を受信し保持する。引き続いて発行番号が同じ値である、衛星軌道情報の差分情報により5衛星分の衛星位置を算出することができる。この時点で、この5衛星のうち、4衛星について基準情報を既に所持しており、かつ、L1 C/Aによる測位信号を受信できていれば測位を行える。続いて残りの5衛星分の衛星軌道情報を受信することで、使用出来る衛星数が10個になる。
【0038】
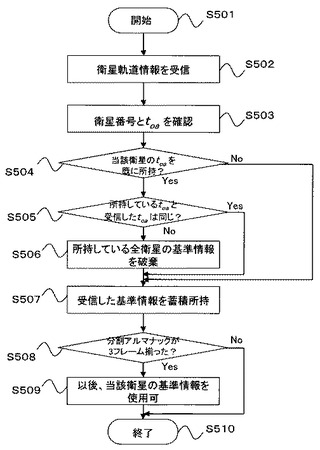
図5に、差分方式を必要とする受信機における、基準情報の蓄積の流れを示したフローチャートを示す。S501にて処理を開始した衛星軌道情報を受信した受信機は、S502に進み、基準情報の更新の有無を知るために、衛星番号とt0aとを確認する。もし当該衛星のt0aについて既に所持しており(S504においてYes)、その所持しているt0aと受信したt0aが異なっていれば(S505においてNo)、送信システムが基準情報の更新を行ったことを意味するので、受信機は所持している全衛星の基準情報を破棄する必要がある(S506)。
【0039】
続いて受信した衛星軌道情報のうち基準情報の蓄積所持を行い(S507)、このとき分割アルマナックが3フレーム分揃ったならば(S508においてYes)、以後当該衛星の基準情報が測位に使用可能となる(S509)。なお、フローには記載していないが受信した基準情報が既に所持している衛星のフレームであるならば、この処理は省略してもよい。
【0040】
基準情報は最大で(GPS 32衛星+QZS 5衛星)×3フレームの111種類のデータで構成されるものであるが、受信機ではこれらを全て蓄積しなければ測位を行えないというわけではない。最小で4衛星×3フレーム分が揃った時点から測位が可能となり、さらに蓄積を進めることで対象と出来る衛星が増えていくものである。従って、受信機には連続的に基準情報を受信しなくてはならないという制約は無い。
【0041】
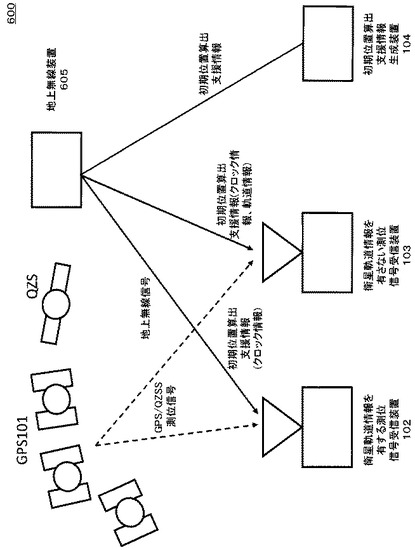
図6に、本発明にかかる衛星測位システムの他の実施形態におけるシステム構成例を示す。衛星測位システム600は、全地球測位システム(GPS)101/QZSと、衛星軌道情報を有する測位信号受信装置102と、衛星軌道情報を有しない測位信号受信装置103と、初期位置算出支援情報を提供する装置104と、初期位置算出支援情報を伝送するための地上無線装置605とからなる。
【0042】
本願発明による初期位置算出支援情報を伝送するための地上無線装置605は、テレビ電波、FM電波等を発信する無線装置を使用することができる。
【0043】
本発明に関し、本明細書の出願前に出願され、公に自由に入手可能なすべての論文および文書が確認されるであろうが、かかる論文および文書の内容は、参照によって本明細書に組み込まれている。
【0044】
本明細書(添付請求項、要約、および図面を含む)に開示された特徴の全て及び/又はそのように開示されたすべての方法または処理のすべてのステップを、そのような特徴及び/又はステップの少なくとも一部が相互に排他的である組合せを除く任意の組合せで組み合わせることができる。
【0045】
本明細書(添付請求項、要約、および図面を含む)に開示された特徴の各々を、そうでないと明示的に述べられていない限り、同一の目的、同等の目的、または類似する目的のために働く代替の特徴に置き換えることができる。したがって、そうでないと明示的に述べられていない限り、開示された各特徴は、包括的な一連の同等の特徴または類似する特徴の一例にすぎない。
【0046】
本発明は、上述の実施形態のいずれの詳細にも制限されない。本願発明は、本明細書(添付請求項、要約、および図面を含む)に開示された新規の特徴またはその新規の組合せ、あるいはそのように開示されたすべての方法または処理のステップまたはその新規の組合せに拡張される。
【符号の説明】
【0047】
100 衛星測位システム
101 GPS
102 衛星軌道情報を有する測位信号受信装置
103 衛星軌道情報を有しない測位信号受信装置
104 初期位置算出支援情報生成装置
105 QZS
605 地上無線装置
【技術分野】
【0001】
本発明は、広く全地球測位システム(GPS)に代表される衛星測位システムから送信される測位信号による位置決定技術に関し、より具体的には、測位信号受信機の起動から位置を決定するまでの時間を短縮化する技術に関する。
【背景技術】
【0002】
従来、衛星測位システムによる位置決定においては、測位衛星から送信される電波を地上の受信機で受信し、衛星から受信機までの電波伝搬時間にもとづいて衛星と受信機との間の距離を計測する。
【0003】
測位衛星から送信される電波には、エフェメリスと呼ばれる測位衛星自身の位置を示す軌道情報と、衛星自身の時刻のズレを意味するクロック情報とが航法データとして重畳される。航法データにはアルマナックと呼ばれるこれらについての全衛星分の概略値も含まれている。これらは50bpsで伝送され、エフェメリスから軌道およびクロックを復調するのには少なくとも30秒を必要とする。
【0004】
一方で、日本において開発されている衛星測位システムとして準天頂衛星システム(QZSS)がある。QZSSは、上述の50bpsの測位信号に加え、250bpsのL1−SAIF信号と呼ばれる補強信号を有する。このL1−SAIF信号の仕様は、IS−QZSS(非特許文献1)において定義され、そのフォーマットはSBAS方式に準拠している。L1−SAIFやSBASでは、主に測位精度を改善するための情報が送信される。
【0005】
そして、衛星測位システムにおける受信機による位置決定にはエフェメリスが必要であるため、受信機が動作を開始してから最初の位置決定を行うまでの時間、即ち初期位置算出時間(TTFF:Time To First Fix)は、少なくともエフェメリスの伝送時間である30秒が必要とされる。TTFFは、ユーザの利便性に直結するものであるため、潜在的に短縮化が求められている。
【0006】
このようなTTFFを短縮化する手法の一例として、特許文献1に示すような、基準となるアルマナックを保持している受信機に対し、エフェメリスとアルマナックとにもとづいて算出した衛星位置と衛星クロックとの差分情報を伝送することにより、受信機はエフェメリスを使用せずに測位を可能とする方式(以下、これを「差分方式」と呼ぶ)がある。
【0007】
そして、特許文献1に示す技術の実装について、SBASやL1−SAIFのメッセージフォーマットを用いた場合の検討が行われている(非特許文献2)。
【0008】
非特許文献2における検討によると、同文献に開示されたビット割り当てを用いることにより、GPSの5衛星分のTTFF短縮に特化した情報の伝送が1メッセージで可能となっている。これにより、性能は、エフェメリスを用いた測位に対し、衛星位置の劣化の程度が10〜15秒程度にわたり10m程度以内とされている。なお、10秒に一度、10衛星分の差分情報を伝送しようとした場合の帯域利用率は、20.0%である。
【0009】
この差分方式を用いるためには、別途、差分の基準とするアルマナック(以下、基準情報という)の伝送も必要とされる。受信機は、測位の前に基準情報を不揮発性メモリに格納しておき、差分情報受信時にこれを使用する。この基準情報は、差分情報の差分値が時間の経過と共に大きくなる性質のものであるため、差分情報の表現可能範囲を超えないうちに一定期間毎に更新する必要がある。また、受信機がいつこのデータを受信するかは、送信システム側は知り得ないので定常的にこれを伝送する必要がある。
【0010】
さらに、GPS32衛星分の基準情報を8分で伝送しようとした場合の帯域利用率は、6.7%である。
【0011】
なお、非特許文献2で対象としている衛星はGPS衛星であり、準天頂衛星に対応させようとした場合、差分情報を伝送する空き領域がないため衛星数もしくは精度を落とす必要がある。
【0012】
一方で、1ヶ月に一度程度の頻度でアシスト情報を外部から与える事が可能な場合には、受信機において衛星の軌道情報の長期間の推定が可能となるのでクロック情報のみを伝送するという手法(以下、クロック方式という)も考えられる。クロック方式におけるメッセージフォーマット例としては、図7に示すフォーマットが考えられるが、この場合には1メッセージでGPS衛星と準天頂衛星について10衛星分の情報を載せることができ、10秒に一度10衛星分の差分情報を伝送しようとした場合の帯域利用率は10.0%となる。
【0013】
上述の差分方式とクロック方式との相違点はその機能である。端的に言えば、差分方式は、外部からアシスト情報を得ることがない受信機に対して有効であり、クロック方式は、外部からアシスト情報を得ることがある受信機に対して有効である。そして、送信システムとしては、幅広い受信機層に対応することが望ましいが、これら2種類の受信機に向けて、上述した条件でデータを伝送しようとした場合の帯域利用率は、20.0%+6.7%+10.0%=36.7%である。
【先行技術文献】
【特許文献】
【0014】
【特許文献1】特開2008−145363号公報
【非特許文献】
【0015】
【非特許文献1】宇宙航空研究開発機構:”準天頂衛星システムユーザインタフェース仕様書(IS−QZSS)1.1版”、2009年7月31日、インターネット<URL:http://qzss.jaxa.jp/is-qzss/>
【非特許文献2】坂井丈泰 「GPS初期位置算出時間(TTFF)短縮のための軌道情報伝送方法」 電子情報通信学会論文誌 B Vol.J83−A No.4 pp.479−486 2008年4月
【発明の概要】
【発明が解決しようとする課題】
【0016】
しかしながら、L1−SAIF信号については、測位精度を向上させるための情報伝送も必要であり、この性能を維持するためには、測位精度向上のための情報の伝送頻度はできるだけ高くすることが望ましい。
【0017】
また、衛星軌道情報を有する測位信号受信機に対しても衛星軌道情報を有さない測位信号受信機に対しても有効な初期位置算出時間短縮手段の提供が望まれる。
【0018】
そこで、本発明は、全地球測位システム(GPS)に代表される衛星測位システムより送信される測位信号に基づいて位置を決定するシステム等において、上述の課題を克服する衛星測位システム及び測位信号受信機等を提供する。
【課題を解決するための手段】
【0019】
本発明は、全地球測位システムと、衛星軌道情報を有する測位信号受信装置と、衛星軌道情報を有さない測位信号受信装置と、初期位置算出支援情報を提供する初期位置算出支援情報生成装置と、前記初期位置算出支援情報を送信するQZSとからなる衛星測位システムであって、初期位置算出支援情報生成装置からは、クロック情報と衛星軌道情報とが前記QZSのL1−SAIF信号に重畳されて前記衛星軌道情報を有する測位信号受信装置及び前記衛星軌道情報を有さない測位信号受信装置に送信されることを特徴とする。
【0020】
また、本発明は、前記衛星軌道情報を有する測位信号受信装置では、前記全地球測位システム/QZSと前記衛星軌道情報を有する測位信号受信装置との距離計測値と、前記衛星軌道情報を有する測位信号受信装置が有する衛星軌道情報と、前記クロック情報とを用いて前記衛星軌道情報を有する測位信号受信装置の位置を決定し、前記衛星軌道情報を有さない測位信号受信装置では、前記全地球測位システムGPS/QZSと前記衛星軌道情報を有さない測位信号受信装置との距離計測値、受信したクロック情報、及び衛星軌道情報を用いて前記衛星軌道情報を有さない測位信号受信装置の位置を決定することを特徴とする。
【発明の効果】
【0021】
本発明によれば、全地球測位システム(GPS)に代表される衛星測位システムより送信される測位信号に基づいて位置を決定するシステム等において、測位精度向上のための情報の伝送頻度はできるだけ高く維持したうえで、衛星軌道情報を有する測位信号受信機に対しても衛星軌道情報を有さない測位信号受信機に対しても、起動から位置決定までの時間を有意に短縮化することができる。
【図面の簡単な説明】
【0022】
【図1】本発明にかかる衛星測位システムの一実施形態におけるシステム構成例を説明する説明図である。
【図2】本発明にかかる衛星測位システムの一実施形態における衛星軌道情報のビットアサインフォーマットの具体例を説明する説明図である。
【図3】本発明にかかる衛星測位システムの一実施形態におけるGPSインジケータ及びQZSインジケータの例を示す図である。
【図4】従来方式と本発明にかかる衛星測位システムの一実施形態の送信パターンの相違を説明する説明図である。
【図5】本発明にかかる衛星測位システムの一実施形態における差分方式を必要とする受信機の基準情報の蓄積の流れを示したフローチャートを示す。
【図6】本発明にかかる衛星測位システムの他の実施形態におけるシステム構成例を説明する説明図である。
【図7】本発明が想定するクロック方式のメッセージフォーマット例である。
【発明を実施するための形態】
【0023】
以下、本発明にかかる衛星測位システム及び測位信号受信機を実施するための形態について詳述する。
【0024】
図1に、本発明にかかる衛星測位システムの一実施形態におけるシステム構成例を示す。
【0025】
衛星測位システム100は、全地球測位システム(GPS)101と、衛星軌道情報を有する測位信号受信装置102と、衛星軌道情報を有さない測位信号受信装置103と、初期位置算出支援情報を提供する装置104と、初期位置算出支援情報を送信するQZS105と、からなる。
【0026】
初期位置算出支援情報生成装置104からは、クロック情報と衛星軌道情報とが、250bpsのデータレートを有するQZSのL1−SAIF信号に重畳されて衛星軌道情報を有する測位信号受信装置102、及び衛星軌道情報を有さない測位信号受信装置103に送信される。衛星軌道情報を有する測位信号受信装置102では、GPS/QZSと測位信号受信装置との距離計測値、自身が有する衛星軌道情報、及び受信したクロック情報を用いて自身の位置を決定する。衛星軌道情報を有さない測位信号受信装置103ではGPS/QZSと測位信号受信装置との距離計測値、受信したクロック情報、及び衛星軌道情報を用いて自身の位置を決定する。
【0027】
図2に、本願発明の衛星軌道情報の具体的なビットアサインフォーマットを示す。本フォーマットは250bitを1メッセージとして扱う。一実施形態として、1メッセージに8bitのプリアンブルと、6bitのメッセージタイプIDと、212ビットのデータと、24bitのCRCパリティとからなる。
【0028】
また、上記212ビットのデータは、2ビットの発行番号と、1ビットのPRNマスクフラグと、140ビットの差分情報と、64ビットの基準情報と、5ビットの予備領域とからなる。
【0029】
発行番号は、この軌道情報が送信される直近前に送信されたクロック情報の発行番号と同期して同一の番号である。クロック情報の示すGPSインジケータ、QZSSインジケータの値が変更されたときに、1ずつカウントアップする。なお、11(Bin)の次は00(Bin)とする。
【0030】
PRNマスクフラグは、差分情報がクロック情報の10衛星のうち、1〜5番目についての情報か、あるいは6〜10番目の情報かを識別するためのものである。例えば、図3に示すように、GPSインジケータの最上位ビットから2、5、10、15、19、20、23、24、29番目のビット、及びQZSSインジケータの最上位ビットから2番目のビットが"1"の場合、PRNマスクフラグが0であれば、差分情報にはGPSの2、5、10、15、19番衛星が含まれることを意味し、PRNマスクフラグが1であれば、差分情報にはGPSの20、23、24、29番衛星、QZSSの2番衛星が含まれることを意味する。この様に衛星情報としてクロック情報を参照することで、例えば、非特許文献2の差分情報から衛星識別のための情報であるPRNi−1およびΔPRNi−1を取り除くことができる。また、準天頂衛星への対応にも支障がない。
【0031】
140ビットの差分情報は、一例として非特許文献2の差分情報で規定されているΔxi、Δyi、Δziの28ビットを1衛星とし、5衛星分を記載する。クロックに関してはクロック情報を参照することとし、クロックの差分であるΔBiについては取り除くことが出来る。
【0032】
64ビットの基準情報は、GPS、QZSSのアルマナックデータを用いるデータであり、8bitのt0a、6bitの衛星番号、2bitのシーケンス番号、48ビットの分割アルマナックからなる。
ここで、t0aはGPS、QZSSで用いられている衛星番号に対応したアルマナックデータのt0aである。送信システムが基準情報を更新すると、この値が変化することになる。例えば、非特許文献2において定義されていたIODAはこのようにt0aで代用できるため、取り除くことができる。
【0033】
衛星番号は、最上位ビットが0の時はGPSを意味しており、下位5ビットに1を加算した値がGPSのPRN番号である。また、最上位ビットが1の時はQZSSを意味しており下位5ビットに193を加算した値がQZSのPRN番号である。
【0034】
分割アルマナックは、1〜3の3フレームで構成され、フレームはシーケンス番号で識別される。シーケンス番号が0の時が1フレーム目、1の時が2フレーム目、2の時が3フレーム目の定義で送信される。分割アルマナックには1フレーム目に16ビットの離心率e、24ビットの軌道長半径の平方根
、8ビットの平均近点角M0の上位1/3が、2フレーム目に16ビットの軌道傾斜角の基準値との差δi、24ビットの昇交点赤径Ω0、8ビットの平均近点角M0の中間1/3が、3フレーム目に16ビットの昇交点赤径の変化率
、24ビットの近地点引数ω、8ビットの平均近点角M0の下位1/3が定義される。af0、及びaf1は、は、クロック補正に関するパラメータなので、基準情報から取り除くことができる。
【0035】
差分による衛星位置の表現範囲を超えた衛星が存在した場合、差分情報でそれが無効であることを示す必要がある。そのような衛星のΔxiには800(HEX)、ΔyiとΔziには80(HEX)と負の最大値を設定することにする。
【0036】
図4に、従来方式と本願発明との送信パターンの違いを示す。クロック情報は、10衛星分の情報を格納するのに対し差分情報は5衛星分であるので、クロック情報1メッセージに差分情報2メッセージを対応させる構成とする。本願発明により、基準情報を別途送信する必要がなくなり、伝送するデータ量を削減することができる。
【0037】
クロック方式を必要とする受信機は、クロック情報を受信する。ここに含まれる衛星のうち、4衛星分の測位信号を受信できた時点で初期位置の算出を行える。
差分方式を必要とする受信機は、まずクロック情報を受信し保持する。引き続いて発行番号が同じ値である、衛星軌道情報の差分情報により5衛星分の衛星位置を算出することができる。この時点で、この5衛星のうち、4衛星について基準情報を既に所持しており、かつ、L1 C/Aによる測位信号を受信できていれば測位を行える。続いて残りの5衛星分の衛星軌道情報を受信することで、使用出来る衛星数が10個になる。
【0038】
図5に、差分方式を必要とする受信機における、基準情報の蓄積の流れを示したフローチャートを示す。S501にて処理を開始した衛星軌道情報を受信した受信機は、S502に進み、基準情報の更新の有無を知るために、衛星番号とt0aとを確認する。もし当該衛星のt0aについて既に所持しており(S504においてYes)、その所持しているt0aと受信したt0aが異なっていれば(S505においてNo)、送信システムが基準情報の更新を行ったことを意味するので、受信機は所持している全衛星の基準情報を破棄する必要がある(S506)。
【0039】
続いて受信した衛星軌道情報のうち基準情報の蓄積所持を行い(S507)、このとき分割アルマナックが3フレーム分揃ったならば(S508においてYes)、以後当該衛星の基準情報が測位に使用可能となる(S509)。なお、フローには記載していないが受信した基準情報が既に所持している衛星のフレームであるならば、この処理は省略してもよい。
【0040】
基準情報は最大で(GPS 32衛星+QZS 5衛星)×3フレームの111種類のデータで構成されるものであるが、受信機ではこれらを全て蓄積しなければ測位を行えないというわけではない。最小で4衛星×3フレーム分が揃った時点から測位が可能となり、さらに蓄積を進めることで対象と出来る衛星が増えていくものである。従って、受信機には連続的に基準情報を受信しなくてはならないという制約は無い。
【0041】
図6に、本発明にかかる衛星測位システムの他の実施形態におけるシステム構成例を示す。衛星測位システム600は、全地球測位システム(GPS)101/QZSと、衛星軌道情報を有する測位信号受信装置102と、衛星軌道情報を有しない測位信号受信装置103と、初期位置算出支援情報を提供する装置104と、初期位置算出支援情報を伝送するための地上無線装置605とからなる。
【0042】
本願発明による初期位置算出支援情報を伝送するための地上無線装置605は、テレビ電波、FM電波等を発信する無線装置を使用することができる。
【0043】
本発明に関し、本明細書の出願前に出願され、公に自由に入手可能なすべての論文および文書が確認されるであろうが、かかる論文および文書の内容は、参照によって本明細書に組み込まれている。
【0044】
本明細書(添付請求項、要約、および図面を含む)に開示された特徴の全て及び/又はそのように開示されたすべての方法または処理のすべてのステップを、そのような特徴及び/又はステップの少なくとも一部が相互に排他的である組合せを除く任意の組合せで組み合わせることができる。
【0045】
本明細書(添付請求項、要約、および図面を含む)に開示された特徴の各々を、そうでないと明示的に述べられていない限り、同一の目的、同等の目的、または類似する目的のために働く代替の特徴に置き換えることができる。したがって、そうでないと明示的に述べられていない限り、開示された各特徴は、包括的な一連の同等の特徴または類似する特徴の一例にすぎない。
【0046】
本発明は、上述の実施形態のいずれの詳細にも制限されない。本願発明は、本明細書(添付請求項、要約、および図面を含む)に開示された新規の特徴またはその新規の組合せ、あるいはそのように開示されたすべての方法または処理のステップまたはその新規の組合せに拡張される。
【符号の説明】
【0047】
100 衛星測位システム
101 GPS
102 衛星軌道情報を有する測位信号受信装置
103 衛星軌道情報を有しない測位信号受信装置
104 初期位置算出支援情報生成装置
105 QZS
605 地上無線装置
【特許請求の範囲】
【請求項1】
全地球測位システムと、衛星軌道情報を有する測位信号受信装置と、衛星軌道情報を有さない測位信号受信装置と、初期位置算出支援情報を提供する初期位置算出支援情報生成装置と、前記初期位置算出支援情報を送信するQZSとからなる衛星測位システムであって、
初期位置算出支援情報生成装置からは、クロック情報と衛星軌道情報とが前記QZSのL1−SAIF信号に重畳されて前記衛星軌道情報を有する測位信号受信装置及び前記衛星軌道情報を有さない測位信号受信装置に送信される
ことを特徴とするシステム。
【請求項2】
前記衛星軌道情報を有する測位信号受信装置では、前記全地球測位システム/QZSと前記衛星軌道情報を有する測位信号受信装置との距離計測値と、前記衛星軌道情報を有する測位信号受信装置が有する衛星軌道情報と、前記クロック情報とを用いて前記衛星軌道情報を有する測位信号受信装置の位置を決定し、
前記衛星軌道情報を有さない測位信号受信装置では、前記全地球測位システムGPS/QZSと前記衛星軌道情報を有さない測位信号受信装置との距離計測値、受信したクロック情報、及び衛星軌道情報を用いて前記衛星軌道情報を有さない測位信号受信装置の位置を決定する
ことを特徴とする請求項1に記載のシステム。
【請求項3】
前記初期位置算出支援情報は、衛星無線により前記測位信号受信装置へ送信されることを特徴とする請求項1又は2のいずれか1項に記載のシステム。
【請求項4】
前記QZSは地上無線装置であり、前記初期位置算出支援情報は、前記地上無線装置の地上無線により前記測位信号受信装置へ送信されることを特徴とする請求項1又は2のいずれか1項に記載のシステム。
【請求項5】
前記クロック情報は、1メッセージとして取り扱われるビットアサインフォーマットが250ビットであり、その中にクロック情報に関連付けられた情報と衛星位置情報とが含まれることを特徴とする請求項1〜4のいずれか1項に記載のシステム。
【請求項6】
請求項1〜5のいずれかに1項に記載のシステムにおける測位信号受信装置。
【請求項1】
全地球測位システムと、衛星軌道情報を有する測位信号受信装置と、衛星軌道情報を有さない測位信号受信装置と、初期位置算出支援情報を提供する初期位置算出支援情報生成装置と、前記初期位置算出支援情報を送信するQZSとからなる衛星測位システムであって、
初期位置算出支援情報生成装置からは、クロック情報と衛星軌道情報とが前記QZSのL1−SAIF信号に重畳されて前記衛星軌道情報を有する測位信号受信装置及び前記衛星軌道情報を有さない測位信号受信装置に送信される
ことを特徴とするシステム。
【請求項2】
前記衛星軌道情報を有する測位信号受信装置では、前記全地球測位システム/QZSと前記衛星軌道情報を有する測位信号受信装置との距離計測値と、前記衛星軌道情報を有する測位信号受信装置が有する衛星軌道情報と、前記クロック情報とを用いて前記衛星軌道情報を有する測位信号受信装置の位置を決定し、
前記衛星軌道情報を有さない測位信号受信装置では、前記全地球測位システムGPS/QZSと前記衛星軌道情報を有さない測位信号受信装置との距離計測値、受信したクロック情報、及び衛星軌道情報を用いて前記衛星軌道情報を有さない測位信号受信装置の位置を決定する
ことを特徴とする請求項1に記載のシステム。
【請求項3】
前記初期位置算出支援情報は、衛星無線により前記測位信号受信装置へ送信されることを特徴とする請求項1又は2のいずれか1項に記載のシステム。
【請求項4】
前記QZSは地上無線装置であり、前記初期位置算出支援情報は、前記地上無線装置の地上無線により前記測位信号受信装置へ送信されることを特徴とする請求項1又は2のいずれか1項に記載のシステム。
【請求項5】
前記クロック情報は、1メッセージとして取り扱われるビットアサインフォーマットが250ビットであり、その中にクロック情報に関連付けられた情報と衛星位置情報とが含まれることを特徴とする請求項1〜4のいずれか1項に記載のシステム。
【請求項6】
請求項1〜5のいずれかに1項に記載のシステムにおける測位信号受信装置。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2012−73082(P2012−73082A)
【公開日】平成24年4月12日(2012.4.12)
【国際特許分類】
【出願番号】特願2010−217365(P2010−217365)
【出願日】平成22年9月28日(2010.9.28)
【国等の委託研究の成果に係る記載事項】(出願人による申告)平成21年度、独立行政法人科学技術振興機構、「準天頂衛星を利用した高精度位置情報実用化システム」委託研究、産業技術力強化法第19条の適用を受ける特許出願
【出願人】(510258474)財団法人 衛星測位利用推進センター (2)
【Fターム(参考)】
【公開日】平成24年4月12日(2012.4.12)
【国際特許分類】
【出願日】平成22年9月28日(2010.9.28)
【国等の委託研究の成果に係る記載事項】(出願人による申告)平成21年度、独立行政法人科学技術振興機構、「準天頂衛星を利用した高精度位置情報実用化システム」委託研究、産業技術力強化法第19条の適用を受ける特許出願
【出願人】(510258474)財団法人 衛星測位利用推進センター (2)
【Fターム(参考)】
[ Back to top ]