
衛星測位システム受信機測位信頼度評価装置
【課題】衛星測位システムの受信機の測位の信頼度の評価の精度を向上させた衛星測位システム受信機測位信頼度評価装置の提供。
【解決手段】移動体に設置された衛星測位システムの受信機の測位信頼度を評価する測位信頼度評価装置であって、受信機の出力に基づいて受信機の測位誤差を推定して、当該測位誤差を第1評価パラメータとして算出する第1評価パラメータ算出部と、衛星測位システムに依拠しない計測手段の出力に基づいて第2評価パラメータを算出する第2評価パラメータ算出部と、少なくとも第1評価パラメータおよび第2評価パラメータを含んだ評価対象データの、所定のデータ集合に対するマハラノビス距離を算出するマハラノビス距離算出部と、マハラノビス距離に基づいて受信機の測位信頼度を評価する信頼度評価部と、を有する、測位信頼度評価装置。
【解決手段】移動体に設置された衛星測位システムの受信機の測位信頼度を評価する測位信頼度評価装置であって、受信機の出力に基づいて受信機の測位誤差を推定して、当該測位誤差を第1評価パラメータとして算出する第1評価パラメータ算出部と、衛星測位システムに依拠しない計測手段の出力に基づいて第2評価パラメータを算出する第2評価パラメータ算出部と、少なくとも第1評価パラメータおよび第2評価パラメータを含んだ評価対象データの、所定のデータ集合に対するマハラノビス距離を算出するマハラノビス距離算出部と、マハラノビス距離に基づいて受信機の測位信頼度を評価する信頼度評価部と、を有する、測位信頼度評価装置。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、衛星測位システム受信機の測位の信頼度を評価する装置に関し、特に、移動体に設置された衛星測位システム受信機の測位信頼度評価装置に関する。
【背景技術】
【0002】
近年、移動体の位置等を知る方法として、GPS(Global Positioning System)といった衛星測位システムが用いられる。GPSにおいては、GPS受信機(以下、単に「受信機」と略称する。)はGPS衛星(以下、単に「衛星」と略称する。)が出力した信号をそのアンテナ部において受信し、受信した信号に含まれる時刻情報と、受信機の時計が示す時刻情報とに基づいて衛星と受信機(のアンテナ部)との距離を求める。受信機は複数の衛星との距離とそれら複数の衛星それぞれの位置情報とに基づき、三角測量の原理を用いて受信機(のアンテナ部)の位置を測位する。一般に、GPSといった衛星測位システムによる測位は誤差を含む。ここでは、当該誤差を測位誤差と称する。測位誤差は、受信機から見た衛星の仰角の高低、受信機から見える(受信機が信号受信可能な)衛星の個数・配置により変化することが知られる。
【0003】
一般に受信機は、NMEA−0183フォーマットに従うデータ(NMEAデータ)を出力することができる(NMEA:米国海洋電子機器協会(あるいは米国船用電子機器協会)(National Marine Electronics Association))。
【0004】
そのうち、NMEAデータ$GPGRSは、衛星i(iは整数N以下の自然数であって、Nは受信機が信号を受信することができる衛星の数。)と受信機との間の擬似距離残差Δriを表すデータである。ここでの擬似距離残差Δriは、擬似距離(受信信号に基づく衛星i−受信機間距離)と、受信機が当該擬似距離に基づいて求めた受信機位置(測位位置)と衛星iの間の距離(測位結果に基づく衛星i−受信機間距離)の差である。また、NMEAデータ$GPGSVは、衛星iの仰角(elevation)および方位(azimuth)を表すデータである。
【0005】
受信機から出力される、各衛星i(i:1〜Nの自然数。)についてのNMEAデータ$GPGRS(擬似距離残差)および$GPGSV(仰角および方位)を総合することで、受信機の測位の結果に含まれる測位誤差を推定し、推定された測位誤差の大きさに基づいて、受信機の測位の信頼度を評価することができる。(非特許文献1参照。)
【0006】
特許文献1は、移動体としての列車の位置を高精度に検出する方法を開示する。特許文献1においては、受信機が出力する、DGPSにおける基準局からの情報およびPDOPのHDOPに基づいて、受信機の測位の信頼度を評価する構成を備える。
【0007】
特許文献2は、列車等の移動体に搭載された受信機の測位の信頼度を診断する手段(「監視手段」)を開示する。特許文献2の発明では、受信機に加え、例えば車軸の回転をセンスして、列車の位置、速度等を計測する計測手段を備え、当該計測手段の計測結果(速度計測値等)に基づいて、受信機の測位の信頼度を診断することができる。また、特許文献2は、車輪の滑走・空転等を検出する手段を開示しており、当該手段は、計測手段による計測の信頼度の診断に用いられる。
【0008】
だがこの方法では、列車の車輪の空転・滑走により評価を誤る可能性がある。特許文献2は、列車の車輪の空転・滑走を検知する手段を開示するものの、検知された空転・滑走を、受信機の測位の信頼度の評価に反映させるための具体的な手法については何ら述べられていない。
【0009】
さらに特許文献2においては、移動体に設置され、それぞれにアンテナが接続された複数の受信機が、それぞれに測位結果を出力する形態が示される。ここでの監視手段は、複数の受信機からの複数の測位結果を、予め備えるアンテナ同士の位置関係にかかる情報と照合し、両者がよく整合するか否かを判定することで、該複数の受信機の測位結果の整合性を診断することができる。ただし、この方法では、監視手段は、個々の受信機の測位の信頼度を評価することはできない。
【0010】
さらにまた、特許文献2においては、鉄道線路に関する情報を路線情報として予め保持する形態も示される。この場合、監視手段は受信機による列車位置測位結果と、当該測位結果の示す位置を路線情報に照らして測位結果の近傍の鉄道線路との間の距離の最小値を求め、当該最小値が所定の値域に含まれるか否かに基づいて受信機の測位結果の信頼度を診断する。
【0011】
上記形態にかかる方法では、列車の進行方向(軌道の接線方向)に垂直な方向についての測位結果の誤差が推定され、この誤差に基づいて列車の進行方向についての受信機の測位の信頼度が診断される。つまり、この手法では、列車の進行方向についての測位の信頼度が列車の進行方向に垂直な方向についての測位の信頼度とおよそ一致するとして、列車進行方向の測位の信頼度を間接的に求めている。だが、一般に、受信機の測位に含まれる誤差は一般に楕円形状を示す。そのため、列車進行方向に垂直な方向についての誤差に基づいて、列車進行方向についての受信機の測位を評価すると誤った評価を下す可能性がある。列車に搭載された受信機の測位の信頼度評価において重要なのは列車の進行方向についての測位の信頼度であるから、ここでの評価手法は最適な手法とは言えない。さらに、この方法では、列車が曲線区間を通過中は、車体の傾斜の影響を排除することができず、評価を誤る可能性がある。
【0012】
このように、従来、衛星測位システム用受信機の測位の信頼度の評価について様々な手法が提案されている。
【0013】
しかしながら、従来の受信機測位の信頼度評価の手法においては、受信機が衛星から信号を受けて行った測位の結果より導かれる該測位の誤差の大きさに基づいて測位の信頼度を評価する際に、受信機が搭載された移動体の状態を考慮することができなかった。そのため、例えば、移動体が加速・減速する状態にあって車輪の空転・滑走により、衛星測位システムから独立した速度計測手段である速度発電機による速度計測の誤差が大きくなった場合に、受信機の測位の信頼度を正しく評価することができなかった。
【先行技術文献】
【特許文献】
【0014】
【特許文献1】特開2009−042179号公報
【特許文献2】特開2000−329839号公報
【非特許文献】
【0015】
【非特許文献1】フランク・ファン・ディグレレン(Frank Van Digglelen)、NMEA0183メッセージ:$GPGRSを用いた、受信機における自律的インテグリティ・モニタリング(Receiver Autonomous Integrity Monitoring, Using the NMEA 0183 Message:$GPGRS)、ION GPS−93プロシーディング(Proceeding of the ION GPS-93)、1993、p.531−538
【発明の概要】
【発明が解決しようとする課題】
【0016】
上記問題点を鑑み、本発明は、衛星測位システムに含まれる要素(衛星等)から提供される情報から推定される測位誤差に基づいて受信機の測位信頼度を評価する際に、受信機が搭載された移動体の状態を考慮することで受信機の測位の信頼度の評価の精度を向上させた衛星測位システム受信機測位信頼度評価装置を提供する。
【課題を解決するための手段】
【0017】
本発明は、その一態様においては、移動体に設置された衛星測位システムの受信機の測位信頼度を評価する測位信頼度評価装置であって、受信機の出力に基づいて受信機の測位誤差を推定して、当該測位誤差を第1評価パラメータとして算出する第1評価パラメータ算出部と、衛星測位システムに依拠しない計測手段の出力に基づいて第2評価パラメータを算出する第2評価パラメータ算出部と、少なくとも第1評価パラメータおよび第2評価パラメータを含んだ評価対象データの、所定のデータ集合に対するマハラノビス距離を算出するマハラノビス距離算出部と、マハラノビス距離に基づいて受信機の測位信頼度を評価する信頼度評価部と、を有する、測位信頼度評価装置である。
【0018】
本発明の一態様においては、さらに、受信機の出力に基づいて受信機の測位位置を算出する衛星測位位置算出部を有し、第2評価パラメータ算出部は、計測手段である移動体の速度を計測する速度センサの出力に基づいて算出された移動体の移動の速さと受信機の測位位置に基づいて算出された速さとの差を、第2評価パラメータとして算出する、ことが好ましい。
【0019】
本発明の一態様においては、移動体は、鉄道車両であり、測位信頼度評価装置が、さらに、鉄道車両の軌道が敷設された位置が示された軌道データを保持する軌道データ保持部と、受信機の測位位置と、軌道データと、に基づいて、受信機の測位位置と軌道との乖離の大きさを第3評価パラメータとして算出する第3評価パラメータ算出部と、を有し、マハラノビス距離算出部は、少なくとも第1評価パラメータ、第2評価パラメータ、および、第3評価パラメータを含んだ評価対象データの、所定のデータ集合に対するマハラノビス距離を算出する、ことが好ましい。
【0020】
本発明の一態様においては、さらに、計測手段である移動体の向きの変化を計測するヨーレートセンサセンサの出力に基づいて算出された移動体の移動のヨーレートと受信機の測位位置に基づいて算出されたヨーレートとの差を、第4評価パラメータとして算出する第4評価パラメータ算出部を有し、マハラノビス距離算出部は、少なくとも第1評価パラメータ、第2評価パラメータ、および、第4評価パラメータを含んだ評価対象データの、所定のデータ集合に対するマハラノビス距離を算出する、ことが好ましい。
【0021】
本発明の一態様においては、さらに、受信機の受信状況の劣化度についての情報のデータを、対応する位置を特定するための情報と関連付けてなる精度劣化予測情報データを保持する予測情報データ保持部と、所定のデータ集合を構成するデータのうち評価対象データの第1評価パラメータに対応するパラメータについての標準偏差である第1標準偏差を修正して、当該修正の結果を修正第1標準偏差としてマハラノビス距離算出部へ通知する第1標準偏差修正部と、を有し、第1標準偏差修正部は、第1標準偏差を、受信機の測位位置に対応する位置の精度劣化予測情報データが示す受信状況が劣化度の増大に応じて減少させるように修正して、修正第1標準偏差としてマハラノビス距離算出部へ通知し、マハラノビス距離算出部は、第1標準偏差に代えて修正第1標準偏差を用いてマハラノビス距離を算出する、ことが好ましい。
【0022】
本発明の一態様においては、所定のデータ集合を構成するデータのうち評価対象データの第2評価パラメータに対応するパラメータについての標準偏差である第2標準偏差を修正して、当該修正の結果を修正第2標準偏差としてマハラノビス距離算出部へ通知する第2標準偏差修正部、を有し、第2標準偏差修正部は、第2標準偏差を、計測手段である移動体の速度を計測する速度センサの出力に基づいて算出された移動体の移動の加速度の絶対値の増大に応じて増加させるように修正して、修正第2標準偏差としてマハラノビス距離算出部へ通知し、マハラノビス距離算出部は、第2標準偏差に代えて修正第2標準偏差を用いてマハラノビス距離を算出する、ことが好ましい。
【0023】
本発明の一態様においては、所定のデータ集合を構成するデータのうち評価対象データの第3評価パラメータに対応するデータの標準偏差である第3標準偏差を修正して、当該修正の結果を修正第3標準偏差としてマハラノビス距離算出部へ通知する第3標準偏差修正部、を有し、第3標準偏差修正部は、第3標準偏差を、軌道データにもとづいて得られる受信機の測位位置に最近接する軌道の曲率の大きさの増大に応じて増加させるように修正して、修正第3標準偏差としてマハラノビス距離算出部へ通知し、マハラノビス距離算出部は、第3標準偏差に代えて修正第3標準偏差を用いてマハラノビス距離を算出する、ことが好ましい。
【0024】
本発明の一態様においては、移動体は、自動車であり、測位信頼度評価装置が、さらに、道路の位置が示された道路地図データを保持する道路地図データ保持部と、受信機の測位位置と、道路地図データと、に基づいて、マップマッチングを行い、当該マップマッチングにかかる移動距離を算出して第3評価パラメータとして算出する第3評価パラメータ算出部と、を有し、マハラノビス距離算出部は、少なくとも第1評価パラメータ、第2評価パラメータ、および、第3評価パラメータを含んだ評価対象データの、所定のデータ集合に対するマハラノビス距離を算出する、ことが好ましい。
【0025】
本発明の一態様においては、所定のデータ集合を構成するデータのうち評価対象データの第3評価パラメータに対応するデータの標準偏差である第3標準偏差を修正して、当該修正の結果を修正第3標準偏差としてマハラノビス距離算出部へ通知する第3標準偏差修正部、を有し、第3標準偏差修正部は、第3標準偏差を、マップマッチング距離の増大に応じて増加させるように修正して、修正第3標準偏差としてマハラノビス距離算出部へ通知し、マハラノビス距離算出部は、第3標準偏差に代えて修正第3標準偏差を用いてマハラノビス距離を算出する、ことが好ましい。
【0026】
本発明の一態様においては、移動体は、航空機であり、測位信頼度評価装置は、さらに、所定のデータ集合を構成するデータのうち評価対象データの第2評価パラメータに対応するパラメータについての標準偏差である第2標準偏差を修正して、当該修正の結果を修正第2標準偏差としてマハラノビス距離算出部へ通知する第2標準偏差修正部と、計測手段としての速度センサを構成する慣性航法装置による慣性航法が開始されてからの経過時間を計測する経過時間計時部と、を有し、第2標準偏差修正部は、第2標準偏差を、経過時間の増大に応じて増加させるように修正して、修正第2標準偏差としてマハラノビス距離算出部へ通知し、マハラノビス距離算出部は、第2標準偏差に代えて修正第2標準偏差を用いてマハラノビス距離を算出する、ことが好ましい。
【0027】
本発明の一態様においては、さらに、慣性航法装置による慣性航法に基づいて航空機の位置である慣性航法位置を算出する慣性航法位置算出部と、受信機の測位位置と慣性航法位置との間の距離の大きさを第3評価パラメータとして算出する第3評価パラメータ算出部と、を有し、マハラノビス距離算出部は、少なくとも第1評価パラメータ、第2評価パラメータ、および、第3評価パラメータを含んだ評価対象データの、所定のデータ集合に対するマハラノビス距離を算出する、ことが好ましい。
【0028】
本発明の一態様においては、所定のデータ集合を構成するデータのうち評価対象データの第3評価パラメータに対応するデータの標準偏差である第3標準偏差を修正して、当該修正の結果を修正第3標準偏差としてマハラノビス距離算出部へ通知する第3標準偏差修正部、を有し、第3標準偏差修正部は、第3標準偏差を、経過時間の増大に応じて増加させるように修正して、修正第3標準偏差としてマハラノビス距離算出部へ通知し、マハラノビス距離算出部は、第3標準偏差に代えて修正第3標準偏差を用いてマハラノビス距離を算出する、ことが好ましい。
【0029】
本発明の一態様においては、移動体は、船舶であり、測位信頼度評価装置は、さらに、所定のデータ集合を構成するデータのうち評価対象データの第2評価パラメータに対応するパラメータについての標準偏差である第2標準偏差を修正して、当該修正の結果を修正第2標準偏差としてマハラノビス距離算出部へ通知する第2標準偏差修正部と、計測手段である船体傾斜センサの出力に基づいて算出された移動体の水平面に対する傾斜角を算出する船体動揺検出部と、を有し、第2標準偏差修正部は、第2標準偏差を、傾斜角の増大に応じて増加させるように修正して、修正第2標準偏差としてマハラノビス距離算出部へ通知し、マハラノビス距離算出部は、第2標準偏差に代えて修正第2標準偏差を用いてマハラノビス距離を算出する、ことが好ましい。
【0030】
本発明は、その別の一態様においては、移動体に設置された衛星測位システムの受信機の測位信頼度を評価する測位信頼度評価装置による測位信頼度評価方法であって、測位信頼度評価装置が、受信機の出力に基づいて受信機の測位誤差を推定して、当該測位誤差を第1評価パラメータとして算出する第1評価パラメータ算出ステップと、測位信頼度評価装置が、衛星測位システムに依拠しない計測手段の出力に基づいて第2評価パラメータを算出する第2評価パラメータ算出ステップと、測位信頼度評価装置が、少なくとも第1評価パラメータとしての受信機の測位誤差および第2評価パラメータを含んだ評価対象データの、所定のデータ集合に対するマハラノビス距離を算出するマハラノビス距離算出ステップと、測位信頼度評価装置が、マハラノビス距離に基づいて受信機の測位信頼度を評価する信頼度評価ステップと、を有する、測位信頼度評価方法である。
【0031】
本発明は、そのさらに別の一態様においては、移動体に設置された衛星測位システムの受信機の測位信頼度を評価する測位信頼度評価装置のコンピュータが実行可能な測位信頼度評価プログラムであって、測位信頼度評価プログラムは、コンピュータを、受信機の出力に基づいて受信機の測位誤差を推定して、当該測位誤差を第1評価パラメータとして算出する第1評価パラメータ算出部と、衛星測位システムに依拠しない計測手段の出力に基づいて第2評価パラメータを算出する第2評価パラメータ算出部と、少なくとも第1評価パラメータとしての受信機の測位誤差および第2評価パラメータを含んだ評価対象データの、所定のデータ集合に対するマハラノビス距離を算出するマハラノビス距離算出部と、マハラノビス距離に基づいて受信機の測位信頼度を評価する信頼度評価部として機能させることを特徴とする、測位信頼度評価プログラムである。
【発明の効果】
【0032】
本発明は、衛星測位システム受信機測位信頼度評価装置の評価精度を向上させることができる。
【図面の簡単な説明】
【0033】
【図1】鉄道車両に設置された第1実施形態による評価装置を示す概略図
【図2】第1実施形態による評価装置のハードウェア構成の例を示すブロック図
【図3】第1実施形態による評価装置の機能的構成の例を示すブロック図
【図4】第1実施形態による評価装置が実行する測位信頼度評価処理のフローチャート
【図5】擬似距離、測位位置、擬似距離残差の関係を説明する概略図
【図6】自動車に設置された第2実施形態による評価装置を示す概略図
【図7】第2実施形態による評価装置の機能的構成の例を示すブロック図
【図8】航空機に設置された第3実施形態による評価装置を示す概略図
【図9】慣性航法装置のハードウェアおよび機能の構成例を示すブロック図
【図10】第3実施形態による評価装置の機能的構成の例を示すブロック図
【図11】船舶に設置された第4実施形態による評価装置を示す概略図
【図12】第4実施形態による評価装置の機能的構成の例を示すブロック図
【発明を実施するための形態】
【0034】
以下、本発明の実施の形態について、詳細に説明する。
【0035】
(概要)
本発明にかかる実施形態は、移動体に設置された、衛星測位システムであるGPS(Global Positioning System)用のGPS受信機(以下、誤認のおそれがない限り単に「受信機」と略称する。)の測位の信頼度評価のための装置(以下、単に「評価装置」と略称する。)である。評価装置は、受信機と接続され、受信機から、測位位置に関する情報(GPS測位位置情報)および測位誤差に関する情報(GPS測位誤差情報)を受け取ることができる。また、評価装置は、衛星測位システムから独立して(衛星測位システムに依らないで)移動体の状態(速度等)を計測することができる独立計測手段と接続され、当該独立計測手段が出力する移動体速度等に関する情報(独立計測情報)を、移動体の状態を示す情報として受け取ることができる。そして、評価装置は、GPS測位誤差情報および独立計測情報にもとづいて評価対象データを構成し、評価対象データの、正常標本データ集合に対するマハラノビス距離を算出し、当該マハラノビス距離に基づいて受信機の測位の信頼度を評価する。
【0036】
なお、正常標本データ集合は、受信機の測位信頼度評価に先立って予め用意される。正常標本データ集合は、GPSおよび独立計測手段が正常に機能していると考えられる状況において収集されたGPS測位誤差および独立計測情報等に基づいて構成される正常標本データが複数含まれる集合である。
【0037】
こうして、評価装置は、GPS由来のデータ(GPS測位誤差情報のデータ)および非GPS由来(独立計測手段等由来)のデータ(独立計測情報のデータ)を統一的尺度(マハラノビス距離)に統合し、当該統一的尺度に基づいた受信機測位信頼度評価を行うことが可能となる。これにより、評価装置は、受信機から取得したGPS測位誤差と独立計測手段から取得した情報から導出した移動体の状態を示す情報との相関を考慮して、より精度よく測位信頼度の評価を行うことが可能である。
【0038】
また、評価装置は、付加情報(GPS測位精度劣化予測情報(後述)、独立計測手段から提供される独立計測情報に基づく移動体加速度に関する情報、など)に基づき、予め準備され評価装置に保持された正常標本データ集合の統計量(正常標本データの各パラメータの平均、標準偏差等)のうち、特定のパラメータの統計量(標準偏差等)を修正し、修正された統計量を含んだ正常標本データ集合の統計量を用いて評価対象データの正常標本データ集合に対するマハラノビス距離を算出することができる。
【0039】
そうすることで、評価装置は、実際の信頼度よりも低く誤評価される(マハラノビス距離が不適切に大きくなる)可能性が高いと予想される状況で収集された評価対象データに対する信頼度評価において、誤って信頼度を不当に低く評価することを防止し、そのような状況においてもなお正確に受信機の測位信頼度の評価を行うことができる。
【0040】
(第1実施形態)
第1実施形態においては、評価装置は、移動体としての鉄道車両に設置される。図1は、鉄道車両201に設置された本実施形態による評価装置101および評価装置101に接続される機器の構成を示すブロック図である。
【0041】
(ハードウェア構成)
評価装置101は、衛星測位システム用受信機である受信機103と接続される。受信機103は、アンテナ部103aと接続され、GPS衛星が発する電波を受信することが可能になっている。
【0042】
また、評価装置101は、衛星測位システムに依らない独立計測手段であるヨーレートセンサ105、および、同じく衛星測位システムに依らない独立計測手段である速度発電機107(速度センサ)と接続される。ヨーレートセンサ105は、鉄道車両201の向きの経時変化を検知するためのセンサであって、鉄道車両201のヨーレートを評価装置101へ出力することができる。速度発電機107は、車軸107axの回転力から発電する発電機であり、車軸107axの回転数に応じた出力電圧を出力することができる。
【0043】
図2は、評価装置101のハードウェア構成の例を示すブロック図である。評価装置101は、データおよびプログラムを格納する主記憶装置3aおよび補助記憶装置3bを備える。主記憶装置3aは、例えば、リード・オンリー・メモリ(ROM)、ランダム・アクセス・メモリ(RAM)等でよい。補助記憶装置3bは、例えば、ハードディスクドライブ(HDD)、フレキシブルディスク(FD)およびそのドライブ装置、光ディスクおよびそのドライブ装置、不揮発性メモリ(NV−RAM)等でよい。中央処理装置1(CPU)は、記憶装置3aおよび3bのいずれかに格納された、測位信頼度評価プログラムを実行することにより、評価装置101の各種機能を実現する演算装置である。ただし、測位信頼度評価プログラムは、記憶装置3aおよび3bに格納されずとも、ネットワーク(不図示)および入力部5を介してCPU1にロードされてもよい。また、CPU1には、入力部5および出力部7が接続される。入力部5は、操作者からの情報の入力、外部デバイスからのデータ入力等を受け、当該入力をCPU1へ送ることができる。出力部7は、CPU1からデータ出力を受け、操作者への情報の出力、外部デバイスへのデータ出力等を行うことができる。評価装置101は、出力部7を介して評価結果を出力することができる。
【0044】
なお、評価装置101のハードウェア構成は、図2に示すような構成に限定されない。評価装置101は、例えば、1つまたは複数の専用集積回路として構成されることも可能である。
【0045】
(機能ブロックの構成)
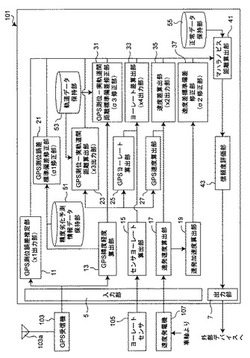
図3は、CPU1が測位信頼度評価プログラムを実行することにより評価装置101に実現される機能を示したブロック図である。
【0046】
GPS測位誤差推定部11(評価パラメータ算出部、x1出力部)は、受信機103から所定のプロトコルに則ったデータ(例えば、NMEAデータ$GPGRS、$GPGSV、$GPGSA等)を受け取り、受け取ったデータに基づいてGPS測位誤差を推定する。このGPS測位誤差については、後で詳述する。
【0047】
GPS緯度経度算出部13(衛星測位位置算出部)は、受信機103からの情報に基づき、受信機による測位結果としての受信機103の位置の緯度および経度(GPS測位位置)を算出する。なお、GPS緯度経度算出部13は、受信機103の高度を算出することも可能である。
【0048】
センサヨーレート算出部15は、独立計測手段であるヨーレートセンサ105からの出力を受け、鉄道車両201の向きの経時的変化を独立計測ヨーレートとして算出する。
【0049】
速発速度算出部17は、独立計測手段である速度発電機107からの出力を受け、移動体(鉄道車両201)のその軌道に沿った方向についての速度を独立計測速度として算出する。
【0050】
速発加速度算出部19は、独立計測手段である速度発電機107からの出力を受け、移動体(鉄道車両201)のその軌道に沿った方向についての加速度を独立計測加速度として算出する。
【0051】
GPS測位誤差標準偏差修正部21(σ1修正部)は、予め評価装置101が保持する精度劣化予測情報データ(後述)と、GPS緯度経度算出部13が出力したGPS測位位置とに基づき、正常標本データ集合の統計量のうち、GPS測位誤差にかかるデータの標準偏差(σ1)を修正する。より具体的には、GPS測位誤差標準偏差修正部21は、正常標本データ集合におけるGPS測位誤差にかかるデータの標準偏差(σ1)に対する修正係数を決定する。
【0052】
(GPS測位精度劣化予測情報について)
鉄道車両、自動車といった移動体(陸上移動体)では、トンネル区間や森林地帯、市街地等における高層建築近傍においてGPS衛星の発する信号に対する受信状況が悪くなり、測位精度が劣化する傾向が見られる。つまり、受信状況は受信機の周囲の状況により劣化する傾向がある。そこで、評価装置101は、予め、地上における受信状況の劣化度(もしくは良好度)についての情報を数値化したデータを、該劣化度情報の指す位置を特定するための情報と関連付けて保持する。
【0053】
劣化度情報の指す位置は、緯度経度の情報によって特定されればよい。また、移動体が鉄道車両の場合には軌道と関連付けられた劣化度情報が示された軌道データを利用することができ、自動車のためには道路と関連付けられた劣化度情報が示された道路地図データを利用することができる。また、鉄道車両の場合、軌道と関連付けて(劣化度情報としての)軌道周囲の状況に関する情報が追加された軌道データを精度劣化予測情報データとして利用でき、自動車の場合、道路と関連付けて(劣化度情報としての)道路周囲の状況に関する情報が追加された道路地図データを精度劣化予測情報データとして利用できる。その他の移動体(航空機、船舶等を含む。)の場合には、受信状況の劣化度と、緯度・経度・高度等とが関連付けされたデータを精度劣化予測情報データとして利用すればよい。
【0054】
受信状況の劣化度は、非負の実数を用いて数値化されてよい。また、劣化度を示す数値は、その値が大きくなるほどに予測される受信状況の悪化の程度が大きくなるように数値化されてよい。つまり、最良の受信状況であることが予測される場合に劣化度の値はゼロとしてよい。また、劣化度の値は、周囲状況について、市街地<森林地帯<トンネル区間の順に大きくなるように設定されてよい。なお、劣化度に関する情報が無い位置については、劣化度の値としてゼロが与えられるようにしてよい。
【0055】
このようにしてGPS測位精度劣化予測情報51を予め準備しておき、GPS測位誤差標準偏差修正部21は、例えば、GPS測位位置に基づいてGPSが測位した位置近傍の精度劣化予測情報51を参照し、GPS測位位置が示す位置に関連付けられた精度劣化予測情報が示す劣化度の値が大きくなればなるほど、正常標本データ集合のGPS測位誤差にかかる検査項目パラメータの集合の標準偏差がより小さな値に修正されるように、修正係数を決定する。正常標本データ集合のGPS測位誤差にかかる検査項目パラメータの集合の標準偏差の値が小さな値に修正されることは、評価対象データの対応するパラメータ(ここでは、GPS測位誤差)がマハラノビス距離の長大化に寄与する程度をパラメータ相互間の相対性において高くする効果がある。つまり、評価装置101は、GPS測位の精度劣化が予想される(GPS測位の誤差が大きくなることが予め判っている)場所で収集した評価対象データに対する測位信頼度の評価では、正常標本データ集合のGPS測位誤差にかかる検査項目パラメータの集合の標準偏差をより小さくすることで、GPS測位の精度劣化をより鋭敏に評価結果に反映させる。
【0056】
こうすることで、評価装置101においては、正常標本データ集合における「GPS測位誤差」のデータについての標準偏差(σ1)は、受信状況の劣化度の関数として受信状況の劣化度の悪化に応じて減少するように修正されることが可能になる。
【0057】
正常標本データ集合における「GPS測位誤差」のデータの標準偏差をσ1、GPS測位位置pにおける受信状況の劣化度の値をf(p)、「GPS測位誤差」のデータの修正された標準偏差をσ1’とすれば、σ1’は、
σ1’=(1/(1+f(p)))×σ1 ・・・・・ (1)
と表される。つまり、GPS測位誤差標準偏差修正部21は、上記式(1)における(1/(1+f(p)))の値を決定する。
【0058】
これにより、評価装置101は、移動体の状態として受信状況が悪いと予測される状況で収集された評価対象データに対する信頼度評価について誤って信頼度を不当に高く評価することを防止し、そのような状況においてもなお正確に受信機の測位信頼度の評価を行うことができる。
【0059】
GPS測位−実軌道間距離算出部23(評価パラメータ算出部、x3出力部)は、GPS測位位置と、鉄道の軌道の緯度・経度(高度は任意。)が示され軌道データ保持部53に保持される軌道データとに基づき、GPS測位位置と実際の軌道との乖離(GPS測位−実軌道間距離)を算出する。GPS測位−実軌道間距離は、GPS測位位置と実軌道との距離(射影量)でよく、軌道の湾曲等で射影量と考えられる量が複数得られる場合には、そのうちで最小の量をGPS測位−実軌道間距離としてよい。
【0060】
GPSヨーレート算出部25は、評価対象データの取得時における鉄道車両201の向きの経時的変化を、該取得時近傍の複数の相異なる時刻におけるGPS測位位置の差分に基づいて算出する(GPSヨーレート)。
【0061】
GPS速度算出部27は、評価対象データの取得時における鉄道車両201の速度を、該取得時近傍の複数の相異なる時刻におけるGPS測位位置の差分に基づいて算出する(GPS速度)。
【0062】
上記より明らかだが、軌道データ保持部53は、鉄道の軌道が敷設された緯度・経度(および高度)の情報が示された軌道データを保持する。軌道データは、さらに、軌道の曲率に関するデータを含むことが望ましい。
【0063】
GPS測位−実軌道間距離標準偏差修正部31(σ3修正部)は、GPS測位位置に基づき、当該GPS測位位置に最も近い(上述の実軌道間距離だけ離れた)軌道上の一点の曲率(R)を軌道データ保持部53より取得し、当該一点における軌道の曲率Rに基づき、正常標本データ集合のGPS測位−実軌道間距離にかかるデータの標準偏差(σ3)を修正する。より具体的には、GPS測位−実軌道間距離標準偏差修正部31は、正常標本データ集合におけるGPS測位−実軌道間距離にかかるデータの標準偏差(σ3)に対する修正量を決定する。
【0064】
鉄道車両では、湾曲した(非直線の)軌道を走行中、車両を傾斜させて走行する。車両の傾斜は、受信機のアンテナ部103aの位置にも影響を及ぼす。傾斜による軌道に対するアンテナ部103aの位置の変化は、GPSの測位の誤差として認識されてしまう可能性がある。このことは、湾曲した軌道を走行する受信機の測位信頼度は、直線軌道走行中よりも、不適切に低く評価される可能性があることを意味する。そこで、評価装置101は、例えば、走行中の軌道の曲率Rが大きくなればなるほど、正常標本データ集合のGPS測位−実軌道間距離にかかるデータの標準偏差(σ3)がより大きな値に修正されるように、修正量を決定する。標準偏差の値が大きな値に修正されることは、評価対象データの対応するパラメータ(ここでは、GPS測位−実軌道間距離)がマハラノビス距離の長大化に寄与する程度をパラメータ相互間の相対性において低くする効果がある。
【0065】
こうすることで、評価装置101においては、正常標本データ集合における「GPS測位−実軌道間距離」にかかるデータの標準偏差(σ3)は、鉄道車両201が在線する軌道上の一点の曲率の関数として曲率の増加に応じて増大するように修正されることが可能になる。
【0066】
正常標本データ集合における「GPS測位−実軌道間距離」のデータの標準偏差をσ3、GPS測位位置pに最近接する軌道上の一点における曲率をR(p)、「GPS測位−実軌道間距離」のデータの修正された標準偏差をσ3’とすれば、σ3’は、
σ3’=k3×R(p)+σ3 (k3:調整パラメータ(後述))・・・(2)
と表される。つまり、GPS測位−実軌道間距離標準偏差修正部31は、上記式(2)におけるk3×R(p)の値を決定する。
【0067】
これにより、評価装置101は、湾曲した軌道を走行するために傾斜した鉄道車両において収集された評価対象データに対する信頼度評価について誤って信頼度を不当に低く評価することを防止し、鉄道車両が傾斜するような状況においてもなお正確に受信機の測位信頼度の評価を行うことができる。
【0068】
ヨーレート差算出部33(評価パラメータ算出部、x4出力部)は、GPSヨーレート算出部25が出力するGPSヨーレートと、センサヨーレート算出部15が出力する独立計測ヨーレートとに基づき、これら2つのヨーレートの差を算出して、ヨーレート差(x4)として出力する。
【0069】
速度差算出部35(評価パラメータ算出部、x2出力部)は、GPS速度算出部27が出力するGPS速度と、速発速度算出部17が出力する独立計測速度とに基づき、これら2つの速度の差を算出して、速度差(x2)として出力する。
【0070】
速度差標準偏差修正部37(σ2修正部)は、速発加速度算出部19が出力する独立計測加速度に基づき、正常標本データ集合の統計量のうち、速度差にかかるデータの標準偏差(σ2)を修正する。より具体的には、速度差標準偏差修正部37は、正常標本データ集合におけるGPS速度と独立計測速度との速度差にかかるデータの標準偏差(σ2)に対する修正量を決定する。
【0071】
鉄道車両の独立速度計測手段である速度発電機107は、既知の径を有する車輪と接続された車軸の単位時間あたり回転数に基づいて独立計測速度を計測する計測手段である。そのため、鉄道車両が加減速中に車輪がスリップして滑走することで速度発電機107の速度計測の精度は著しく劣化する。また、低速度での運転中や、車軸が接続された車輪の径が変化したりすることでも速度発電機107の速度計測の精度が悪化することが知られている。
【0072】
速度発電機107の速度計測の精度の変化は、GPSによる測位から求めたGPS速度の誤差の変化として誤認識される可能性がある。このことは、軌道に沿った方向に加減速中の受信機の測位信頼度は、軌道に沿った方向に定速走行中よりも、不適切に低く評価される可能性があることを意味する。そこで、評価装置101は、例えば、軌道に沿った方向の鉄道車両の加速度(の絶対値)が大きくなればなるほど、正常標本データ集合の速度差にかかる検査項目パラメータの集合の標準偏差がより大きな値に修正されるように、修正量を決定する。標準偏差の値が大きな値に修正されることは、評価対象データの対応するパラメータ(ここでは、速度差)がマハラノビス距離の長大化に寄与する程度をパラメータ相互間の相対性において低くする効果がある。
【0073】
こうすることで、評価装置101においては、正常標本データ集合における「速度差」にかかるデータの標準偏差(σ2)は、鉄道車両201の加速度(の絶対値)の関数として加速度(の絶対値)の増大に応じて増大するように修正されることが可能になる。
【0074】
正常標本データ集合における「速度差」のデータの標準偏差をσ2、鉄道車両の(独立計測)加速度をa、「速度差」のデータの修正された標準偏差をσ2’とすれば、σ2’は、
σ2’=k2×|a|+σ2 (k2:調整パラメータ(後述)) ・・・(3)
と表される。つまり、速度差標準偏差修正部37は、上記式(3)におけるk2×|a|の値を決定する。
【0075】
これにより、評価装置101は、軌道に沿った方向において独立計測手段から加速度が検出された加減速中の鉄道車両において収集された評価対象データに対する信頼度評価について誤って信頼度を不当に低く評価することを防止し、鉄道車両が加減速中の状況においてもなお正確に受信機の測位信頼度の評価を行うことができる。
【0076】
マハラノビス距離算出部41は、評価対象データの、正常標本データ集合に対するマハラノビス距離を算出する。
【0077】
ここでの評価対象データは、
GPS測位誤差推定部11が出力するGPS測位誤差(x1)、
速度差算出部35が出力する速度差(x2)、
GPS測位−実軌道間距離算出部23が出力するGPS測位−実軌道間距離(x3)、
ヨーレート差算出部33が出力するヨーレート差(x4)、
をパラメータとして含むベクトル量である。
【0078】
また、正常標本データ集合の統計量は、正常標本データ保持部55に保持される。該当計量は、正常標本データ集合における各パラメータ(検査項目パラメータ)の平均および標準偏差であって、
正常標本データ集合のGPS測位誤差平均(m1)、
正常標本データ集合の速度差平均(m2)、
正常標本データ集合のGPS測位−実軌道間距離平均(m3)、
正常標本データ集合のヨーレート差平均(m4)、
正常標本データ集合のGPS測位誤差標準偏差(σ1)、
正常標本データ集合の速度差標準偏差(σ2)、
正常標本データ集合のGPS−測位実軌道間距離標準偏差(σ3)、
正常標本データ集合のヨーレート差標準偏差(σ4)、である。
【0079】
また、正常標本データ保持部55は、式(3)における調整パラメータk2の値、および、式(2)における調整パラメータk3の値を保持する。
【0080】
そして、マハラノビス距離算出部41は、評価対象データのマハラノビス距離の算出において、
正常標本データ集合のGPS測位誤差平均(m1)、
正常標本データ集合の速度差平均(m2)、
正常標本データ集合のGPS測位−実軌道間距離平均(m3)、
正常標本データ集合のヨーレート差平均(m4)、
修正GPS測位誤差標準偏差(σ1’)、(式(1)参照。)
修正速度差標準偏差(σ2’)、(式(3)参照。)
修正GPS−測位実軌道間距離標準偏差(σ3’)、(式(2)参照。)
正常標本データ集合のヨーレート差標準偏差(σ4)、
を用いる。
【0081】
信頼度評価部43は、マハラノビス距離算出部41が算出した、評価対象データの正常標本データ集合に対するマハラノビス距離に基づき、受信機の測位信頼度を評価する。具体的には、信頼度評価部43は、マハラノビス距離が大きくなればなるほど、測位信頼度を低く評価するように、評価を行う。例えば、評価部43は、所定の閾値を1つまたは複数設け、2レベルまたはより多くのレベルで測位信頼度を評価する。
【0082】
(正常標本データの収集および正常検査項目パラメータの標準偏差の決定処理)
これより、評価対象データに基づく測位信頼度評価に先立って予め収集される正常標本データおよびその集合の具体例、ならびに、正常標本データ集合の所定の検査項目パラメータの標準偏差に対する調整パラメータ(k2(式(3))、k3(式(2)))の決定の具体例を示す。
【0083】
先ず、受信機が搭載された移動体(例えば、鉄道車両201)を、視界が開けた直線軌道上において、軌道方向に沿った方向について定速度で走行させる。そして、定速度走行中の鉄道車両において検査項目パラメータ(GPS測位誤差、速度差平均、GPS測位−実軌道間距離、ヨーレート差)のデータを収集する。これらのパラメータで構成されるデータが正常標本データとなる。このデータ収集作業を複数回実行する。複数回実行後に集まった複数の正常標本データが正常標本データ集合を構成する。
【0084】
検査項目パラメータを4つ、データ収集作業をn回実行すれば各検査項目パラメータについてn個ずつ、トータル4n個のデータが得られる。この4n個のデータから、各検査項目について、平均、および、標準偏差を求める。
【表1】

【0085】
上記4n個のデータが、正常標本データ集合を構成するデータとして用いられる。つまり、ここで求めた平均mi(i:1〜4)および標準偏差σi(i:1〜4)が、正常標本データ集合の各パラメータの平均および標準偏差である。正常データ保持部55は、これら平均mi(i:1〜4)および標準偏差σi(i:1〜4)を、正常標本データ集合を表す統計量として保持すればよい。
【0086】
(調整パラメータk2の決定処理)
次に、受信機が搭載された移動体(例えば、鉄道車両201)を、視界が開けた直線軌道上において、軌道方向に沿った方向についてその加速度の絶対値が|a0|(a0はゼロ以外の実数。)になるように加減速走行させる。そして、加減速走行中の鉄道車両において検査項目パラメータのうち、少なくとも検査項目「速度差」(上表における「検査項目2」)のデータを収集する。このデータ収集作業は、na回実行される(naは、自然数)。なお、実行回数(na)は、2以上であることが望ましい。
【0087】
この収集作業をna回実行すれば、少なくとも検査項目2パラメータについてのna個のデータが得られる。(下表に示すデータd2a1〜d2anaが得られる。)
【表2】
【0088】
この結果にもとづいて、式(3)に含まれる調整パラメータk2を決定する。
【0089】
上記定加速度走行データの集合(データd2a1〜d2ana)の、正常標本データ集合(定速直線走行データ)における上記データ集合と対応する検査項目パラメータ((検査項目2)のデータ(d21〜d2n))の平均値(平均m2)に対する標準偏差(σ2a)を次式より求める。
【数1】
【0090】
そして、式(4)より求めた標準偏差σ2a、正常標本データ集合を表す統計量のうち検査項目2「速度差」にかかる標準偏差σ2、定加速度走行データ収集にかかる加速度a0を用い、次式、
σ2a=k2×|a0|+σ2 ・・・ (5)、
を満足するk2を求め、該k2を調整パラメータk2とする。式(5)より決定された調整パラメータk2は、正常データの一部を構成するデータとして、正常データ保持部55に保持される。
【0091】
(調整パラメータk3の決定処理)
最後に、受信機が搭載された移動体(例えば、鉄道車両201)を、視界が開けた曲線軌道(曲率R0)上において、軌道方向に沿った方向について定速で走行させる。そして、曲率R0の曲線軌道上を定速走行中の鉄道車両において検査項目パラメータのうち、少なくとも検査項目「実軌道との距離」(上表における「検査項目3」)のデータを収集する。このデータ収集作業は、nR回実行される(nRは、自然数)。なお、実行回数(nR)もまた、2以上であることが望ましい。
【0092】
この収集作業をnR回実行すれば、少なくとも検査項目3パラメータについてのnR個のデータが得られる。(下表に示すデータd3R1〜d3RnRが得られる。)
【表3】
【0093】
この結果にもとづいて、式(2)に含まれる調整パラメータk3を決定する。上記定速曲線走行データの集合(データd3R1〜d3RnR)の、正常標本データ集合(定速直線走行データ)における上記データ集合と対応する検査項目パラメータ((検査項目3)のデータ(d31〜d3n))の平均値(平均m3)に対する標準偏差(σ3R)を次式より求める。
【数2】
【0094】
そして、式(6)より求めた標準偏差σ3R、正常標本データ集合を表す統計量のうち検査項目3「実軌道との距離」にかかる標準偏差σ3、定速曲線走行データ収集にかかる曲率R0を用い、次式、
σ3R=k3×R0+σ3 ・・・ (7)、
を満足するk3を求め、該k3を調整パラメータk3とする。式(7)より決定された調整パラメータk3は、正常データの一部を構成するデータとして、正常データ保持部55に保持される。
【0095】
(測位信頼度評価処理フロー)
次に、図4を参照し、評価装置101によるマハラノビス距離に基づく受信機の測位信頼度評価にかかる処理について説明する。図4は、評価対象データを構成する検査項目パラメータのデータ収集から測位信頼度評価までの処理の流れを示すフローチャートである。
【0096】
ステップS101において、GPS測位誤差推定部11(x1出力部)は、受信機103から受け取ったデータに基づいてGPS測位誤差を推定して、マハラノビス距離算出部41へ出力する。
【0097】
(GPSによる測位位置にかかる測位誤差の推定)
ここでGPS測位誤差について説明する。
【0098】
GPS衛星による受信機位置(GPS測位位置)の導出では、受信機103は、複数のGPS衛星と受信機103間の距離を測定して、三角測量の原理で受信機位置(GPS測位位置)を特定して求めている。ここでのGPS測位誤差は、GPS衛星から発信された信号から計算した直線距離(擬似距離r)と、受信機が測位位置として最終的に決定したGPS測位位置に基づく受信機と衛星間の直線距離との差(擬似距離残差Δr)およびGPS衛星配置から計算することができる。また、一般的な受信機には、上記諸量を計算するための出力がNEMAデータ($GPGRS、$GPGSV、$GPGSAとして標準で出力可能である。(非特許文献1参照。)
【0099】
図5は、擬似距離rと擬似距離残差Δrとの関係を説明するための模式図である。受信機が受信可能なGPS衛星がN機あるとする。
【0100】
衛星i(iは、1からNの整数。)と受信機103との間の距離ri[m]の関係は、受信機位置を(x,y,z)、衛星iの位置を(xi,yi,zi)、受信機103が内蔵する時計の時間誤差δ[sec]に対応する距離誤差をs=c・δ[m](cは光速)とすると、
【数3】
と表される。
【0101】
このときriの変化量Δriと、x、y、z、sの変化量Δx、Δy、Δz、Δsとの関係は、
【数4】
ただし、
【数5】
となる。
【0102】
受信機が計測した距離ri(擬似距離)をrim、rimをもとに決定したGPS位置および時計誤差を(xc,yc,zc,sc)としたとき、rimと、(xc,yc,zc,sc)から式(1)で計算した距離ricとの差、すなわち擬似距離残差Δri=rim−ricをN個縦に並べた擬似距離残差ベクトルΔr=(Δr1,Δr2,・・・,ΔrN)Tと測位誤差ベクトルΔx=(Δx,Δy,Δz,Δs)Tとの関係が
【数6】
と求まる。
【0103】
ここで、行列Gは
【数7】
である。
【0104】
li、mi、niはそれぞれ衛星iと受信機103とを結ぶ直線のx軸、y軸、z軸に対する方向余弦である。
【0105】
よって、li、mi、niは、受信機103から見た衛星iの仰角(elevation)をeli、北をゼロとした方位角(azimuth)をaziとして、
【数8】
から求めることができる。
【0106】
連立方程式(11)の解は最小二乗法により
【数9】
で求めることができる。
【0107】
擬似距離残差Δriは、NMEAデータ$GPGRSとして受信機103から出力され、仰角eliおよび方位角aziは、NMEAデータ$GPGSVとして受信機103から出力されるので、GPS測位誤差推定部11は、リアルタイムで行列G、すなわち、((GTG)−1GT)を求めることができる。式(14)の数値計算においては、特異値分解で擬似逆行列((GTG)−1GT)を直接求めることができる。また、A=GTG,b(ベクトル)=GTΔr(ベクトル)とおいてAΔx=bの連立一次方程式をLU分解で求めてもよい。
【0108】
なお、鉄道車両のように移動体のGPS測位位置について高度を考慮する必要がない場合には、式(14)で示されるGPS測位誤差ベクトルのうち、水平方向成分のみを抽出して、水平面に関する測位誤差dERRH
【数10】
をGPS測位誤差として用いてもよい。
【0109】
図4に戻り、ステップS103において、速度差算出部35(x2出力部)は、速度差(x2)を、マハラノビス距離算出部41へ出力する。
【0110】
ステップS105において、GPS測位−実軌道間距離算出部23は、GPS測位−実軌道間距離(x3)を、マハラノビス距離算出部41へ出力する。
【0111】
ステップS107において、ヨーレート差算出部33は、ヨーレート差(x4)を、マハラノビス距離算出部41へ出力する。
【0112】
ステップS109において、GPS測位誤差標準偏差修正部21は、精度劣化予測情報データ保持部51に保持された精度劣化予測情報を参照して、GPS測位位置pにおける劣化度の値f(p)を求め、前述の式(1)より、修正GPS測位位置標準偏差σ1’を決定する。決定したσ1’は、マハラノビス距離算出部41に通知される。
【0113】
ステップS111において、速発加速度算出部19は、鉄道車両201の独立計測加速度を算出して、速度差算出部35へ出力する。
【0114】
ステップS113において、速度差標準偏差修正部37(σ2修正部)は、独立計測加速度aを用いて、前述の式(3)より、修正速度差標準偏差σ2’を決定する。決定したσ2’は、マハラノビス距離算出部41に通知される。
【0115】
ステップS115において、GPS−実軌道間距離標準偏差修正部31は、GPS測位位置に基づき、鉄道車両201が在線する軌道上の位置を推定し、当該位置における軌道の曲率を軌道データ保持部53に保持された軌道データを参照して決定し、その曲率をR(p)として、前述の式(2)より、修正実軌道間距離標準偏差σ3’を決定する。決定したσ3’は、マハラノビス距離算出部41に通知される。
【0116】
ステップS117において、マハラノビス距離算出部41は、評価対象データ(x1,x2,x3,x4)の正常標本データ集合に対するマハラノビス距離を算出する。なお、マハラノビス距離算出部41は、正常標本データ集合の統計量として平均(m1,m2,m3,m4)および標準偏差(σ1’,σ2’,σ3’,σ4)を用いて評価対象データのマハラノビス距離を算出してもよい。算出したマハラノビス距離は、信頼度評価部43へ送られる。
【0117】
ステップS119において、信頼度評価部43は、マハラノビス距離算出部41から受けたマハラノビス距離の大きさに基づいて、受信機103の測位の信頼度を評価する。
【0118】
このように、評価装置101は、評価対象データ(GPS測位誤差および独立計測情報)についての正常標本データ集合に対するマハラノビス距離に基づいて受信機の測位信頼度の評価を行うことができる。そうすることで、評価装置101においては、GPS測位誤差に加えて評価対象データが取得されたときの移動体の状態を考慮した測位信頼度の評価が可能になっている。
【0119】
また、評価装置101は、独立計測手段等の計測データをもとに移動体の状態を考慮して、マハラノビス距離の算出にかかる評価対象データのパラメータ相互間の相対的な重み(標準偏差)を変更することができ、より適切な測位信頼度の評価が可能になっている。
【0120】
(マハラノビス距離の計算について)
ここで、ステップS117においてマハラノビス距離算出部41が算出するマハラノビス距離の算出の方法について説明する。
(正常標本データ集合の統計量について)
k個のデータ項目(検査項目)について、n個の正常標本データが収集されているとする。
【表4】
ここで、mjは、検査項目j(j:1〜kの整数。)のデータの平均、σjは、検査項目j(j:1〜kの整数。)のデータの標準偏差であって、
【数11】
である。
【0121】
次に、正常標本データについて、
【数12】
の正規化を行う。正規化後の正常標本データを下表に示す。
【表5】
【0122】
次に、行列{d’ji}の相関行列C={rji}を計算する。このとき、対角項は1、rji=rijである。
【数13】
そして、さらに、行列Cの逆行列C−1を計算しておく。
【0123】
(対象データの正常標本データ集合に対するマハラノビス距離の算出について)
マハラノビス距離の算出の対象となるデータをデータx=(x1,x2,・・・,xk)とする。先ず、データxを式(19)のようにして正規化する。
【数14】
【0124】
正規化された対象データx’について、正常標本データ集合に対するマハラノビス距離を次式より算出する。マハラノビス距離をDとして、
【数15】
【0125】
本実施形態による評価装置101は、物理的な単位が相異なる複数のデータを、マハラノビス距離として統合することができ、1つの統一的な尺度に基づく測位信頼度の定量的評価が可能になっている。これにより、評価結果の信頼性もまた向上される。
【0126】
さらに、本実施形態による評価装置101は、評価対象データの収集時に受信機の測位の精度が劣化していると予測される場合には、評価対象データにおける受信機の測位に基づく検査項目と対応する正常標本データの検査項目の標準偏差の大きさがより小さくなるように修正することにより当該検査項目のマハラノビス距離における他の検査項目に対する相対的な重みを重くして当該受信機の測位精度の劣化がより鋭敏に評価結果に反映されるようにし、また、評価対象データの収集時に独立計測手段の計測の精度が劣化していると予測される場合には、評価対象データにおける独立計測手段の計測に基づく検査項目と対応する正常標本データの検査項目の標準偏差の大きさがより大きくなるように修正することにより当該検査項目のマハラノビス距離における他の検査項目に対する相対的な重みを軽くして当該独立計測手段の計測精度の劣化が敏感に評価結果に反映されないようにする。そうすることで、測位信頼度の評価の精度をよく保つことが可能になっている。
【0127】
また、本実施形態による評価装置101は、上記した検査項目パラメータに限らず、如何なる単位を有する量でも測位信頼度評価の検査項目パラメータとして容易に導入可能である。これにより、評価装置101は、顕著な汎用性を有するものとなっている。
【0128】
(第2実施形態)
第2実施形態においては、評価装置は、移動体としての自動車に設置される。図6は、自動車301に設置された本実施形態による評価装置101aおよび評価装置101aに接続される機器の構成を示すブロック図である。以下の説明においては、第1実施形態と同様の構成・動作・効果等については適宜説明を省略する。
【0129】
(ハードウェア構成)
評価装置101aは、衛星測位システム用受信機である受信機103と接続される。
【0130】
また、評価装置101aは、衛星測位システムに依らない独立計測手段である走行速度計107aと接続される。走行速度計107aは、速度発電機107と同様に、車軸107axの回転力から自動車の走行速度の情報(速度計速度)を出力することができる。評価装置101aは、自動車301が定常的な横滑り運動を行うことは無いものと仮定し、GPS速度に対応する独立計測情報として走行速度計107aによる速度計速度を利用する。
【0131】
(機能ブロックの構成)
図7は、評価装置101aが備える機能を示したブロック図である。
【0132】
評価装置101aにおけるGPS測位誤差推定部11、GPS緯度経度算出部13、速度計測度算出部17a、速度計加速度算出部19a、GPS測位誤差標準偏差修正部21、GPS速度算出部27、速度差算出部35、速度差標準偏差修正部37、マハラノビス距離算出部41、信頼度評価部43、精度劣化予測情報データ保持部51、正常データ保持部55、については、第1実施形態における対応ブロックと同様の動作を行う。
【0133】
マップマッチング移動距離算出部23a(評価パラメータ算出部)は、GPS緯度経度算出部13が出力するGPS測位位置、および、道路地図データ保持部53が保持する道路地図データに基づき、GPS測位位置を道路上の一点へ移動させるマップマッチングを行い、当該マップマッチングでGPS測位位置が移動させられた距離(マップマッチング移動距離x3)を算出する。
【0134】
マップマッチング移動距離標準偏差修正部31a(σ3修正部)は、上記マップマッチング移動距離算出部23aが行ったマップマッチングにかかる移動先の道路上の一点の、位置特定困難度が高くなるにつれて、マップマッチング移動距離標準偏差(σ3)がより大きくなるように、マップマッチング移動距離標準偏差(σ3)を修正し、修正された当該標準偏差を修正マップマッチング移動距離標準偏差(σ3’)としてマハラノビス距離算出部41へ通知する。例えば、修正部31aは、位置特定困難度として、GPS測位位置のマップマッチングによる移動先の道路上の一点の道路幅(例えば、車線数)を利用してよい。
【0135】
正常標本データ集合における「マップマッチング移動距離」のデータの標準偏差をσ3、GPS測位位置pがマップマッチングにより移動された先の道路上の一点における位置特定困難度をW(p)、「マップマッチング移動距離」のデータの修正された標準偏差をσ3’とすれば、σ3’は、
σ3’=k3×W(p)+σ3 (k3:調整パラメータ) ・・・・ (2’)
と表される。調整パラメータk3は、正常標本データとは異なる位置特定困難度を有する道路(例えば、車線数が正常標本データ収集に用いた道路よりも多い道路)を用いて収集したデータに基づいて評価されればよい。そして、マップマッチング移動距離標準偏差修正部31aは、上記式(2’)におけるk3×W(p)の値を決定する。位置特定困難度W(p)は、道路の幅もしくは車線数が大きくなるにつれ増大するように設定すればよい。
【0136】
上記より明らかだが、道路地図データ保持部53は、道路の緯度・経度(および高度)の情報が示された道路地図データを保持する。道路地図データは、さらに、道路の幅や車線数に関するデータを含むことが望ましい。
【0137】
マハラノビス距離算出部41は、評価対象データの、正常標本データ集合に対するマハラノビス距離を算出する。
【0138】
ここでの評価対象データは、
GPS測位誤差推定部11が出力するGPS測位誤差(x1)、
速度差算出部35が出力する速度差(x2)、
マップマッチング移動離算出部23が出力するマップマッチング移動距離(x3)、
をパラメータとして含むベクトル量である。
【0139】
また、正常標本データ集合の統計量は、正常標本データ保持部55に保持される。該当計量は、正常標本データ集合における各パラメータ(検査項目パラメータ)の平均および標準偏差であって、
正常標本データ集合のGPS測位誤差平均(m1)、
正常標本データ集合の速度差平均(m2)、
正常標本データ集合のマップマッチング移動距離(m3)、
正常標本データ集合のGPS測位誤差標準偏差(σ1)、
正常標本データ集合の速度差標準偏差(σ2)、
正常標本データ集合のマップマッチング移動距離標準偏差(σ3)、である。
【0140】
また、正常標本データ保持部55は、式(3)における調整パラメータk2の値、および、式(2’)における調整パラメータk3の値を保持する。
【0141】
そして、マハラノビス距離算出部41は、評価対象データのマハラノビス距離の算出において、
正常標本データ集合のGPS測位誤差平均(m1)、
正常標本データ集合の速度差平均(m2)、
正常標本データ集合のGPS測位−実軌道間距離平均(m3)、
修正GPS測位誤差標準偏差(σ1’)、(式(1)参照。)
修正速度差標準偏差(σ2’)、(式(3)参照。)
修正GPS−測位実軌道間距離標準偏差(σ3’)、(式(2’)参照。)
を用いる。
【0142】
評価装置101aの信頼度評価部43は、第1実施形態による評価装置101の信頼度評価部43と同様に、マハラノビス距離算出部41が算出した、評価対象データの正常標本データ集合に対するマハラノビス距離に基づき、受信機の測位信頼度を評価する。
【0143】
本実施形態では、道路幅が広くてマップマッチングによって移動される道路上の一点に比較的大きな誤差が含まれる可能性が高い状況、かつ/または、移動体が加速中であって走行速度計107aの計測した速度に比較的大きな誤差が含まれる可能性が高い状況で計測された評価対象データについては、マップマッチング移動距離、および/または、速度差のマハラノビス距離における相対的な重みを軽くすることで、評価装置101aが誤って受信機103の測位信頼度を過小評価することを防止することができる。
【0144】
(第3実施形態)
第3実施形態においては、評価装置は、移動体としての航空機に設置される。図8は、航空機401に設置された本実施形態による評価装置101bおよび評価装置101bに接続される機器の構成を示すブロック図である。以下の説明においては、第1および/または第2の実施形態と同様の構成・動作・効果等については適宜説明を省略する。
【0145】
(ハードウェア構成)
評価装置101bは、衛星測位システム用受信機である受信機103と接続される。
【0146】
また、評価装置101bは、衛星測位システムに依らない独立計測手段である慣性航法装置109と接続される。慣性航法装置109は、航空機401の水平・垂直速度を成分とする三次元速度ベクトルVINSを出力することができる。評価装置101bは、GPS速度に対応する独立計測情報として慣性航法装置109から得た三次元速度ベクトルVINSを利用する。
【0147】
(慣性航法装置について)
図9は、慣性航法装置109の動作を示すブロック図である。慣性航法装置109は、センサ部111として、三軸方向について計測可能な加速度計111aおよびジャイロスコープ111bを備える。加速度計111aの出力は、各軸加速度導出部113へ送られ、各軸加速度導出部113が当該三軸方向についての加速度を導出する。導出された三軸方向加速度は、水平・垂直加速度導出部115へ送られる。
【0148】
他方、ジャイロスコープ111bは、各軸まわりの角速度を検知して出力する。ジャイロスコープ111bが検知した三軸まわりの角速度は、各軸角速度導出部123へ送られ、各軸角速度導出部123が三軸まわりの角速度を決定する。そして、三軸まわりの角速度は各軸姿勢角導出部121へ送られる。各軸姿勢角導出部121は、三軸まわりの角速度を時間方向に積分することにより、航空機401の姿勢角を導出する。導出された姿勢角は、水平・垂直加速度導出部115へ送られる。
【0149】
水平・垂直加速度導出部115は、姿勢角に基づき、三軸方向加速度を、水平(N、E)および垂直(Az)方向の加速度(aN,aE,aAz)に変換し、水平・垂直加速度として出力部127および水平・垂直速度導出部117へ送る。
【0150】
水平・垂直速度導出部117は、水平・垂直加速度(aN,aE,aAz)を時間方向に積分することにより、水平・垂直速度(vN,vE,vAz)(=三次元速度ベクトルVINS)を導出し、水平・垂直速度として出力部127および水平・垂直移動距離導出部119へ送る。
【0151】
水平・垂直移動距離導出部119は、水平・垂直速度(vN,vE,vAz)を時間方向に積分することにより、水平・垂直移動距離(drN,drE,drAz)を導出し、出力部127へ水平・垂直移動距離として出力部127へ送る。また、水平・垂直移動距離導出部119は、慣性航法装置109の起算点の位置ベクトルr0=(r0N,r0E,r0Az)を保持してもよく、その場合には、航空機401の位置ベクトルrINS=(rN,rE,rAz)=(drN,drE,drAz)+r0を出力部127へ出力することができる。
【0152】
このように、慣性航法装置109は、水平方向(N,E)および垂直方向(Az)についての加速度・速度・移動距離を示す各ベクトル、ならびに、航空機401の位置を示す位置ベクトルを出力することが可能である。ただし、慣性航法装置109が出力する速度や位置は、センサ部111が計測した加速度を積分して得られる量であるため、慣性航法装置109が起動されてからの時間が長くなるにつれ誤差が大きくなることがある。
【0153】
また、慣性航法装置109は、慣性航法装置109が起動されてからの時間を計測して出力するタイマ部125を備えることも可能である。なお、このタイマ部125は必須ではない。慣性航法装置109がタイマ部125を備えない場合には、評価装置101b(後述)が、慣性航法装置109が起動されてからの時間を計測して出力するタイマ部125に相当する構成を備えればよい。
【0154】
(機能ブロックの構成)
図10は、評価装置101bが備える機能を示したブロック図である。
【0155】
評価装置101bにおけるGPS測位誤差推定部11、GPS緯度経度算出部13a、GPS測位誤差標準偏差修正部21、マハラノビス距離算出部41、信頼度評価部43、精度劣化予測情報データ保持部51、については、第1実施形態における対応ブロックと同様の動作を行う。ただし、GPS緯度経度算出部13aは、緯度および経度に加えて、高度についてのGPS測位位置も出力する。
【0156】
また、本実施形態においては、正常データ保持部55は、正常標本データ集合の統計量として、以下の項目を保持すればよい。
・ 高度にかかる測位誤差を含めたGPS測位誤差平均(m1)、
・ 水平(N,E)および垂直(Az)方向の3成分についての速度差平均(m2N,m2E,m2Az)、
・ 水平(N,E)および垂直(Az)方向の3成分についてのGPS測位と独立計測手段(慣性航法装置109)による測位との位置誤差平均(m3N,m3E,m3Az)、
・ 高度にかかる測位誤差を含めたGPS測位誤差標準偏差(σ1)、
・ 水平(N,E)および垂直(Az)方向の3成分についての速度差標準偏差(σ2N,σ2E,σ2Az)、
・ 水平(N,E)および垂直(Az)方向の3成分についてのGPS測位と独立計測手段(慣性航法装置109)による測位との位置誤差標準偏差(σ3N,σ3E,σ3Az)
【0157】
さらに、正常データ保持部55は、速度差標準偏差(σ2N,σ2E,σ2Az)にかかる調整パラメータとして調整パラメータk2=(k2N,k2E,k2Az)と、位置誤差標準偏差(σ3N,σ3E,σ3Az)にかかる調整パラメータとして調整パラメータk3=(k3N,k3E,k3Az)を備えてもよい。正常標本データは、慣性航法が開始された直後の時点において計測されればよい。また、調整パラメータk2およびk3は、慣性航法が開始されて所定時間経過した時点において計測されたデータに基づいて定めればよい。
【0158】
本実施形態におけるマハラノビス距離算出部41は、慣性航法が開始されてからの経過時間が長期化すればするほどに値が大きくなるように修正された修正速度差標準偏差(σ’2N,σ’2E,σ’2Az)および修正位置誤差標準偏差(σ’3N,σ’3E,σ’3Az)を用いてマハラノビス距離を算出してもよい。
【0159】
GPS速度ベクトル水平・垂直成分算出部27aは、GPS測位位置に基づき航空機401の速度を、水平(N,E)および垂直(Az)方向の3成分で示したGPS速度ベクトルVGPSとして算出する。
【0160】
速度ベクトル水平・垂直成分算出部17bは、独立計測手段である慣性航法装置109の出力に基づく航空機401の速度を、水平(N,E)および垂直(Az)方向の3成分で示した独立計測速度ベクトルVINSとして算出する。
【0161】
GPS位置ベクトル水平・垂直成分算出部45は、GPS測位位置に基づき航空機401の位置を、水平(N,E)および垂直(Az)方向の3成分で示したGPS位置ベクトルrGPSとして算出する。
【0162】
位置ベクトル水平・垂直成分算出部47は、独立計測手段である慣性航法装置109の出力に基づく航空機401の位置を、水平(N,E)および垂直(Az)方向の3成分で示した独立計測位置ベクトルrINSとして算出する。
【0163】
慣性航法経過時間計時部49は、例えば慣性航法装置109の出力に基づいて、慣性航法が開始されてからの経過時間を計測し、慣性航法経過時間TLPSとして出力する。
【0164】
速度差水平・垂直成分算出部35a(評価パラメータ算出部)は、GPS測位位置に基づく速度ベクトル、GPS速度ベクトルVGPS、と、独立計測手段による速度ベクトル、独立計測速度ベクトルVINS、との差を求め、速度差の水平(N,E)および垂直(Az)方向の3成分(x2N,x2E,x2Az)を算出する。
【0165】
位置誤差水平・垂直成分算出部23a(評価パラメータ算出部)は、GPS測位位置に基づく位置ベクトル、GPS位置ベクトルrGPS、と、独立計測手段による位置ベクトル、独立計測位置ベクトルrINS、との差を求め、位置誤差の水平(N,E)および垂直(Az)方向の3成分(x3N,x3E,x3Az)を算出する。
【0166】
位置誤差水平・垂直成分標準偏差修正部31bは、慣性航法経過時間TLPSに基づいて、位置誤差標準偏差(σ3N,σ3E,σ3Az)を修正する。具体的には、慣性航法経過時間TLPSが長期化すればするほど、位置誤差標準偏差(σ3N,σ3E,σ3Az)の各成分の値はより大きくなるように修正される。そして、位置誤差水平・垂直成分標準偏差修正部31bは、修正後の値を、修正位置誤差標準偏差(σ’3N,σ’3E,σ’3Az)として出力する。
【0167】
速度差水平・垂直成分標準偏差修正部37aは、慣性航法経過時間TLPSに基づいて、速度差標準偏差(σ2N,σ2E,σ2Az)を修正する。具体的には、慣性航法経過時間TLPSが長期化すればするほど、速度差標準偏差(σ2N,σ2E,σ2Az)の各成分の値はより大きくなるように修正される。そして、速度差水平・垂直成分標準偏差修正部37aは、修正後の値を、修正速度差標準偏差(σ’2N,σ’2E,σ’2Az)として出力する。
【0168】
そして、マハラノビス距離算出部41は、評価対象データの、正常標本データ集合に対するマハラノビス距離を算出する。
【0169】
ここでの評価対象データは、
GPS測位誤差推定部11が出力する、高度にかかる測位誤差を含めたGPS測位誤差(x1)、
速度差水平・垂直成分算出部35aが出力する、速度差の水平(N,E)および垂直(Az)方向の3成分(x2N,x2E,x2Az)、
位置誤差水平・垂直成分算出部23aが出力する、位置誤差の水平(N,E)および垂直(Az)方向の3成分(x3N,x3E,x3Az)、
をパラメータとして含むベクトル量である。
【0170】
また、マハラノビス距離算出部41は、正常標本データ集合の統計量として、高度にかかる測位誤差を含めたGPS測位誤差平均(m1)、速度差平均(m2N,m2E,m2Az)、位置誤差平均(m3N,m3E,m3Az)、高度にかかる測位誤差を含めたGPS測位誤差標準偏差(σ1)、速度差標準偏差(σ2N,σ2E,σ2Az)、位置誤差標準偏差(σ3N,σ3E,σ3Az)、を用いればよい。
【0171】
あるいは、マハラノビス距離算出部41は、速度差標準偏差(σ2N,σ2E,σ2Az)に代えて、
修正速度差標準偏差(σ’2N,σ’2E,σ’2Az)
=(k2N×TLPS+σ2N,
k2E×TLPS+σ2E,
k2Az×TLPS+σ2Az)を用いてもよく、あるいは、位置誤差標準偏差(σ3N,σ3E,σ3Az)に代えて、
修正位置誤差標準偏差(σ’3N,σ’3E,σ’3Az)
=(k3N×TLPS+σ3N,
k3E×TLPS+σ3E,
k3Az×TLPS+σ3Az)を用いてもよい。
【0172】
評価装置101bの信頼度評価部43は、第1実施形態による評価装置101の信頼度評価部43と同様に、マハラノビス距離算出部41が算出した、評価対象データの正常標本データ集合に対するマハラノビス距離に基づき、受信機の測位信頼度を評価する。
【0173】
なお、慣性航法装置109の代わりに、独立計測手段として、超短波全方向式無線標識施設(VHF Omnidirectional Range、VOR)、および、距離測定装置(Distance Measuring Equipment、DME)等を用いてもよい。
【0174】
慣性航法装置109にておいは、慣性航法が開始されてからの経過時間に従って計測誤差が大きくなることが知られるが、本実施形態では、そういった計測誤差が生じる状況で計測された評価対象データについては、速度差および位置誤差のマハラノビス距離における相対的な重みを軽くすることで、評価装置101bが誤って受信機103の測位信頼度を過小評価することを防止することができる。
【0175】
(第4実施形態)
第4実施形態においては、評価装置は、移動体として船舶に設置される。図11は、船舶501に設置された本実施形態による評価装置101cおよび評価装置101cに接続される機器の構成を示すブロック図である。以下の説明においては、第1、第2および/または第3の実施形態と同様の構成・動作・効果等については適宜説明を省略する。
【0176】
(ハードウェア構成)
評価装置101cは、衛星測位システム用受信機である受信機103と接続される。
【0177】
また、評価装置101cは、衛星測位システムに依らない独立計測手段である、対地速度計107b、ジャイロコンパス107g、および、船体の水平面に対する傾斜角θROLLをセンスする船体傾斜センサ131と接続される。対地速度計107bは、ドップラーソナー107dsと接続される。
【0178】
ドップラーソナー107dsは、水深数百メートル程度までの海域において、船体501の船首方向、船首に垂直な方向の対地速度VSONAR=(vsx,vsy)を計測することができる。
【0179】
ジャイロコンパス107gは、船首が向いている方向φ(例えば、船首の磁北に対する角度φ)をセンスする。
【0180】
(機能ブロックの構成)
図12は、評価装置101cが備える機能を示したブロック図である。
【0181】
評価装置101cにおけるGPS測位誤差推定部11、GPS緯度経度算出部13、GPS測位誤差標準偏差修正部21、マハラノビス距離算出部41、信頼度評価部43、精度劣化予測情報データ保持部51、については、第1実施形態における対応ブロックと同様の動作を行う。
【0182】
また、本実施形態においては、正常データ保持部55は、正常標本データ集合の統計量として、
GPS測位誤差平均(m1)、
水平(N,E)方向の2成分についての速度差平均(m2N,m2E)、
GPS測位誤差標準偏差(σ1)、
水平(N,E)方向の2成分についての速度差標準偏差(σ2N,σ2E)、を保持すればよい。さらに、正常データ保持部55は、速度差標準偏差(σ2N,σ2E,σ2Az)にかかる調整パラメータとして調整パラメータk2=(k2N,k2E)を備えてもよい。正常標本データは、船体が動揺しない状況において計測されればよい。また、調整パラメータk2は、船体が動揺する状況において計測されたデータに基づいて定めればよい。
【0183】
本実施形態におけるマハラノビス距離算出部41は、船体の動揺の程度(|θROLL|)が大きくなればなるほどに値が大きくなるように修正された修正速度差標準偏差(σ’2N,σ’2E)およびを用いてマハラノビス距離を算出してもよい。
【0184】
GPS速度水平二軸成分算出部27bは、GPS測位位置に基づき船舶501の速度を、水平(N,E)方向の2成分で示したGPS速度ベクトルVGPSとして算出する。
【0185】
速度水平二軸成分算出部17cは、独立測手段である対地速度計107bの出力(対地速度VSONAR=(vsx,vsy))および独立計測手段であるジャイロコンパス107gの出力(角度φ)にもとづき、独立計測手段による船舶501の速度を、水平(N,E)方向の2成分で示した独立計測速度ベクトルVDS(=(vsx×cosφ,vsy×sinφ))として算出する。
【0186】
船体動揺検出部49aは、船体傾斜センサ131の出力にもとづき、船体の水平面に対する傾斜角θROLLを出力する。傾斜角θROLLは、二方向(N,E)について求めてもよい。その場合、後述する修正部37bにおいては、各方向の傾斜角を対応する方向の標準偏差の修正に用いることができる。
【0187】
速度差水平成分算出部35bは、GPS測位位置に基づく速度ベクトル、GPS速度ベクトルVGPS、と、独立計測手段による速度ベクトル、独立計測速度ベクトルVDS、との差を求め、速度差の水平(N,E)方向の2成分(x2N,x2E)を算出する。
【0188】
速度差標準偏差修正部37bは、傾斜角θROLLに基づいて、速度差標準偏差(σ2N,σ2E)を修正する。具体的には、傾斜角θROLLが大きくなればなるほど、速度差標準偏差(σ2N,σ2E)の各成分の値はより大きくなるように修正される。そして、速度差標準偏差修正部37bは、修正後の値を、修正速度差標準偏差(σ’2N,σ’2E)として出力する。
【0189】
そして、マハラノビス距離算出部41は、評価対象データの、正常標本データ集合に対するマハラノビス距離を算出する。
【0190】
ここでの評価対象データは、
GPS測位誤差推定部11が出力する、GPS測位誤差(x1)、
速度差水平成分算出部35bが出力する、速度差の水平(N,E)方向の2成分(x2N,x2E)、
をパラメータとして含むベクトル量である。
【0191】
また、マハラノビス距離算出部41は、正常標本データ集合の統計量として、GPS測位誤差平均(m1)、速度差平均(m2N,m2E)、GPS測位誤差標準偏差(σ1)、速度差標準偏差(σ2N,σ2E)、を用いればよい。
【0192】
あるいは、マハラノビス距離算出部41は、速度差標準偏差(σ2N,σ2E)に代えて、
修正速度差標準偏差(σ’2N,σ’2E)
=(k2×|θROLL|+σ2N,
k2×|θROLL|+σ2E)を用いてもよい。
【0193】
評価装置101cの信頼度評価部43は、第1実施形態による評価装置101の信頼度評価部43と同様に、マハラノビス距離算出部41が算出した、評価対象データの正常標本データ集合に対するマハラノビス距離に基づき、受信機の測位信頼度を評価する。
【0194】
ドップラーソナー107dsにておいは、船体の動揺により計測誤差が生じることが知られるが、本実施形態では、そういった計測誤差が生じる状況で計測された評価対象データについては、速度差のマハラノビス距離における相対的な重みを軽くすることで、評価装置101cが誤って受信機103の測位信頼度を過小評価することを防止することができる。
【0195】
本発明において、「衛星測位システム」には、GPSが含まれ、それに限定されない。本願においてGPSを構成する衛星を、GPS衛星と称する。GPS衛星は、NAVSTER(NAVigation Satellite Timing And Ranging)衛星とも称される。
【0196】
本発明において、「移動体」は、地上を移動する移動体(鉄道車両、自動車、自動二輪、ロボット等)、空中を飛翔する移動体(航空機、ロケット、ミサイル等)、水上もしくは水中を移動する移動体(船舶、潜水艦、魚雷等)を含み、それらに限定されない。「移動体」は、所定の座標系(例えば、任意の局所慣性系)に対して位置座標を変化させることができるあらゆる物体を含む。
【0197】
本発明において、正常標本データ集合の標準偏差を修正する工程(図4のステップS109、S113、S115)は、必ずしも必須ではない。これら標準偏差修正工程が行われずとも、本発明は、移動体の状態を考慮した受信機測位誤差信頼度評価を行うことが可能である。
【産業上の利用可能性】
【0198】
本発明は、衛星測位システムを用いた測位の結果の信頼度を評価する装置として有用である。
【符号の説明】
【0199】
101 ・・・ 評価装置
103 ・・・ 受信機
103a・・・ アンテナ部
107ax・・ 車軸
201 ・・・ 鉄道車両
301 ・・・ 自動車
401 ・・・ 航空機
501 ・・・ 船舶
【技術分野】
【0001】
本発明は、衛星測位システム受信機の測位の信頼度を評価する装置に関し、特に、移動体に設置された衛星測位システム受信機の測位信頼度評価装置に関する。
【背景技術】
【0002】
近年、移動体の位置等を知る方法として、GPS(Global Positioning System)といった衛星測位システムが用いられる。GPSにおいては、GPS受信機(以下、単に「受信機」と略称する。)はGPS衛星(以下、単に「衛星」と略称する。)が出力した信号をそのアンテナ部において受信し、受信した信号に含まれる時刻情報と、受信機の時計が示す時刻情報とに基づいて衛星と受信機(のアンテナ部)との距離を求める。受信機は複数の衛星との距離とそれら複数の衛星それぞれの位置情報とに基づき、三角測量の原理を用いて受信機(のアンテナ部)の位置を測位する。一般に、GPSといった衛星測位システムによる測位は誤差を含む。ここでは、当該誤差を測位誤差と称する。測位誤差は、受信機から見た衛星の仰角の高低、受信機から見える(受信機が信号受信可能な)衛星の個数・配置により変化することが知られる。
【0003】
一般に受信機は、NMEA−0183フォーマットに従うデータ(NMEAデータ)を出力することができる(NMEA:米国海洋電子機器協会(あるいは米国船用電子機器協会)(National Marine Electronics Association))。
【0004】
そのうち、NMEAデータ$GPGRSは、衛星i(iは整数N以下の自然数であって、Nは受信機が信号を受信することができる衛星の数。)と受信機との間の擬似距離残差Δriを表すデータである。ここでの擬似距離残差Δriは、擬似距離(受信信号に基づく衛星i−受信機間距離)と、受信機が当該擬似距離に基づいて求めた受信機位置(測位位置)と衛星iの間の距離(測位結果に基づく衛星i−受信機間距離)の差である。また、NMEAデータ$GPGSVは、衛星iの仰角(elevation)および方位(azimuth)を表すデータである。
【0005】
受信機から出力される、各衛星i(i:1〜Nの自然数。)についてのNMEAデータ$GPGRS(擬似距離残差)および$GPGSV(仰角および方位)を総合することで、受信機の測位の結果に含まれる測位誤差を推定し、推定された測位誤差の大きさに基づいて、受信機の測位の信頼度を評価することができる。(非特許文献1参照。)
【0006】
特許文献1は、移動体としての列車の位置を高精度に検出する方法を開示する。特許文献1においては、受信機が出力する、DGPSにおける基準局からの情報およびPDOPのHDOPに基づいて、受信機の測位の信頼度を評価する構成を備える。
【0007】
特許文献2は、列車等の移動体に搭載された受信機の測位の信頼度を診断する手段(「監視手段」)を開示する。特許文献2の発明では、受信機に加え、例えば車軸の回転をセンスして、列車の位置、速度等を計測する計測手段を備え、当該計測手段の計測結果(速度計測値等)に基づいて、受信機の測位の信頼度を診断することができる。また、特許文献2は、車輪の滑走・空転等を検出する手段を開示しており、当該手段は、計測手段による計測の信頼度の診断に用いられる。
【0008】
だがこの方法では、列車の車輪の空転・滑走により評価を誤る可能性がある。特許文献2は、列車の車輪の空転・滑走を検知する手段を開示するものの、検知された空転・滑走を、受信機の測位の信頼度の評価に反映させるための具体的な手法については何ら述べられていない。
【0009】
さらに特許文献2においては、移動体に設置され、それぞれにアンテナが接続された複数の受信機が、それぞれに測位結果を出力する形態が示される。ここでの監視手段は、複数の受信機からの複数の測位結果を、予め備えるアンテナ同士の位置関係にかかる情報と照合し、両者がよく整合するか否かを判定することで、該複数の受信機の測位結果の整合性を診断することができる。ただし、この方法では、監視手段は、個々の受信機の測位の信頼度を評価することはできない。
【0010】
さらにまた、特許文献2においては、鉄道線路に関する情報を路線情報として予め保持する形態も示される。この場合、監視手段は受信機による列車位置測位結果と、当該測位結果の示す位置を路線情報に照らして測位結果の近傍の鉄道線路との間の距離の最小値を求め、当該最小値が所定の値域に含まれるか否かに基づいて受信機の測位結果の信頼度を診断する。
【0011】
上記形態にかかる方法では、列車の進行方向(軌道の接線方向)に垂直な方向についての測位結果の誤差が推定され、この誤差に基づいて列車の進行方向についての受信機の測位の信頼度が診断される。つまり、この手法では、列車の進行方向についての測位の信頼度が列車の進行方向に垂直な方向についての測位の信頼度とおよそ一致するとして、列車進行方向の測位の信頼度を間接的に求めている。だが、一般に、受信機の測位に含まれる誤差は一般に楕円形状を示す。そのため、列車進行方向に垂直な方向についての誤差に基づいて、列車進行方向についての受信機の測位を評価すると誤った評価を下す可能性がある。列車に搭載された受信機の測位の信頼度評価において重要なのは列車の進行方向についての測位の信頼度であるから、ここでの評価手法は最適な手法とは言えない。さらに、この方法では、列車が曲線区間を通過中は、車体の傾斜の影響を排除することができず、評価を誤る可能性がある。
【0012】
このように、従来、衛星測位システム用受信機の測位の信頼度の評価について様々な手法が提案されている。
【0013】
しかしながら、従来の受信機測位の信頼度評価の手法においては、受信機が衛星から信号を受けて行った測位の結果より導かれる該測位の誤差の大きさに基づいて測位の信頼度を評価する際に、受信機が搭載された移動体の状態を考慮することができなかった。そのため、例えば、移動体が加速・減速する状態にあって車輪の空転・滑走により、衛星測位システムから独立した速度計測手段である速度発電機による速度計測の誤差が大きくなった場合に、受信機の測位の信頼度を正しく評価することができなかった。
【先行技術文献】
【特許文献】
【0014】
【特許文献1】特開2009−042179号公報
【特許文献2】特開2000−329839号公報
【非特許文献】
【0015】
【非特許文献1】フランク・ファン・ディグレレン(Frank Van Digglelen)、NMEA0183メッセージ:$GPGRSを用いた、受信機における自律的インテグリティ・モニタリング(Receiver Autonomous Integrity Monitoring, Using the NMEA 0183 Message:$GPGRS)、ION GPS−93プロシーディング(Proceeding of the ION GPS-93)、1993、p.531−538
【発明の概要】
【発明が解決しようとする課題】
【0016】
上記問題点を鑑み、本発明は、衛星測位システムに含まれる要素(衛星等)から提供される情報から推定される測位誤差に基づいて受信機の測位信頼度を評価する際に、受信機が搭載された移動体の状態を考慮することで受信機の測位の信頼度の評価の精度を向上させた衛星測位システム受信機測位信頼度評価装置を提供する。
【課題を解決するための手段】
【0017】
本発明は、その一態様においては、移動体に設置された衛星測位システムの受信機の測位信頼度を評価する測位信頼度評価装置であって、受信機の出力に基づいて受信機の測位誤差を推定して、当該測位誤差を第1評価パラメータとして算出する第1評価パラメータ算出部と、衛星測位システムに依拠しない計測手段の出力に基づいて第2評価パラメータを算出する第2評価パラメータ算出部と、少なくとも第1評価パラメータおよび第2評価パラメータを含んだ評価対象データの、所定のデータ集合に対するマハラノビス距離を算出するマハラノビス距離算出部と、マハラノビス距離に基づいて受信機の測位信頼度を評価する信頼度評価部と、を有する、測位信頼度評価装置である。
【0018】
本発明の一態様においては、さらに、受信機の出力に基づいて受信機の測位位置を算出する衛星測位位置算出部を有し、第2評価パラメータ算出部は、計測手段である移動体の速度を計測する速度センサの出力に基づいて算出された移動体の移動の速さと受信機の測位位置に基づいて算出された速さとの差を、第2評価パラメータとして算出する、ことが好ましい。
【0019】
本発明の一態様においては、移動体は、鉄道車両であり、測位信頼度評価装置が、さらに、鉄道車両の軌道が敷設された位置が示された軌道データを保持する軌道データ保持部と、受信機の測位位置と、軌道データと、に基づいて、受信機の測位位置と軌道との乖離の大きさを第3評価パラメータとして算出する第3評価パラメータ算出部と、を有し、マハラノビス距離算出部は、少なくとも第1評価パラメータ、第2評価パラメータ、および、第3評価パラメータを含んだ評価対象データの、所定のデータ集合に対するマハラノビス距離を算出する、ことが好ましい。
【0020】
本発明の一態様においては、さらに、計測手段である移動体の向きの変化を計測するヨーレートセンサセンサの出力に基づいて算出された移動体の移動のヨーレートと受信機の測位位置に基づいて算出されたヨーレートとの差を、第4評価パラメータとして算出する第4評価パラメータ算出部を有し、マハラノビス距離算出部は、少なくとも第1評価パラメータ、第2評価パラメータ、および、第4評価パラメータを含んだ評価対象データの、所定のデータ集合に対するマハラノビス距離を算出する、ことが好ましい。
【0021】
本発明の一態様においては、さらに、受信機の受信状況の劣化度についての情報のデータを、対応する位置を特定するための情報と関連付けてなる精度劣化予測情報データを保持する予測情報データ保持部と、所定のデータ集合を構成するデータのうち評価対象データの第1評価パラメータに対応するパラメータについての標準偏差である第1標準偏差を修正して、当該修正の結果を修正第1標準偏差としてマハラノビス距離算出部へ通知する第1標準偏差修正部と、を有し、第1標準偏差修正部は、第1標準偏差を、受信機の測位位置に対応する位置の精度劣化予測情報データが示す受信状況が劣化度の増大に応じて減少させるように修正して、修正第1標準偏差としてマハラノビス距離算出部へ通知し、マハラノビス距離算出部は、第1標準偏差に代えて修正第1標準偏差を用いてマハラノビス距離を算出する、ことが好ましい。
【0022】
本発明の一態様においては、所定のデータ集合を構成するデータのうち評価対象データの第2評価パラメータに対応するパラメータについての標準偏差である第2標準偏差を修正して、当該修正の結果を修正第2標準偏差としてマハラノビス距離算出部へ通知する第2標準偏差修正部、を有し、第2標準偏差修正部は、第2標準偏差を、計測手段である移動体の速度を計測する速度センサの出力に基づいて算出された移動体の移動の加速度の絶対値の増大に応じて増加させるように修正して、修正第2標準偏差としてマハラノビス距離算出部へ通知し、マハラノビス距離算出部は、第2標準偏差に代えて修正第2標準偏差を用いてマハラノビス距離を算出する、ことが好ましい。
【0023】
本発明の一態様においては、所定のデータ集合を構成するデータのうち評価対象データの第3評価パラメータに対応するデータの標準偏差である第3標準偏差を修正して、当該修正の結果を修正第3標準偏差としてマハラノビス距離算出部へ通知する第3標準偏差修正部、を有し、第3標準偏差修正部は、第3標準偏差を、軌道データにもとづいて得られる受信機の測位位置に最近接する軌道の曲率の大きさの増大に応じて増加させるように修正して、修正第3標準偏差としてマハラノビス距離算出部へ通知し、マハラノビス距離算出部は、第3標準偏差に代えて修正第3標準偏差を用いてマハラノビス距離を算出する、ことが好ましい。
【0024】
本発明の一態様においては、移動体は、自動車であり、測位信頼度評価装置が、さらに、道路の位置が示された道路地図データを保持する道路地図データ保持部と、受信機の測位位置と、道路地図データと、に基づいて、マップマッチングを行い、当該マップマッチングにかかる移動距離を算出して第3評価パラメータとして算出する第3評価パラメータ算出部と、を有し、マハラノビス距離算出部は、少なくとも第1評価パラメータ、第2評価パラメータ、および、第3評価パラメータを含んだ評価対象データの、所定のデータ集合に対するマハラノビス距離を算出する、ことが好ましい。
【0025】
本発明の一態様においては、所定のデータ集合を構成するデータのうち評価対象データの第3評価パラメータに対応するデータの標準偏差である第3標準偏差を修正して、当該修正の結果を修正第3標準偏差としてマハラノビス距離算出部へ通知する第3標準偏差修正部、を有し、第3標準偏差修正部は、第3標準偏差を、マップマッチング距離の増大に応じて増加させるように修正して、修正第3標準偏差としてマハラノビス距離算出部へ通知し、マハラノビス距離算出部は、第3標準偏差に代えて修正第3標準偏差を用いてマハラノビス距離を算出する、ことが好ましい。
【0026】
本発明の一態様においては、移動体は、航空機であり、測位信頼度評価装置は、さらに、所定のデータ集合を構成するデータのうち評価対象データの第2評価パラメータに対応するパラメータについての標準偏差である第2標準偏差を修正して、当該修正の結果を修正第2標準偏差としてマハラノビス距離算出部へ通知する第2標準偏差修正部と、計測手段としての速度センサを構成する慣性航法装置による慣性航法が開始されてからの経過時間を計測する経過時間計時部と、を有し、第2標準偏差修正部は、第2標準偏差を、経過時間の増大に応じて増加させるように修正して、修正第2標準偏差としてマハラノビス距離算出部へ通知し、マハラノビス距離算出部は、第2標準偏差に代えて修正第2標準偏差を用いてマハラノビス距離を算出する、ことが好ましい。
【0027】
本発明の一態様においては、さらに、慣性航法装置による慣性航法に基づいて航空機の位置である慣性航法位置を算出する慣性航法位置算出部と、受信機の測位位置と慣性航法位置との間の距離の大きさを第3評価パラメータとして算出する第3評価パラメータ算出部と、を有し、マハラノビス距離算出部は、少なくとも第1評価パラメータ、第2評価パラメータ、および、第3評価パラメータを含んだ評価対象データの、所定のデータ集合に対するマハラノビス距離を算出する、ことが好ましい。
【0028】
本発明の一態様においては、所定のデータ集合を構成するデータのうち評価対象データの第3評価パラメータに対応するデータの標準偏差である第3標準偏差を修正して、当該修正の結果を修正第3標準偏差としてマハラノビス距離算出部へ通知する第3標準偏差修正部、を有し、第3標準偏差修正部は、第3標準偏差を、経過時間の増大に応じて増加させるように修正して、修正第3標準偏差としてマハラノビス距離算出部へ通知し、マハラノビス距離算出部は、第3標準偏差に代えて修正第3標準偏差を用いてマハラノビス距離を算出する、ことが好ましい。
【0029】
本発明の一態様においては、移動体は、船舶であり、測位信頼度評価装置は、さらに、所定のデータ集合を構成するデータのうち評価対象データの第2評価パラメータに対応するパラメータについての標準偏差である第2標準偏差を修正して、当該修正の結果を修正第2標準偏差としてマハラノビス距離算出部へ通知する第2標準偏差修正部と、計測手段である船体傾斜センサの出力に基づいて算出された移動体の水平面に対する傾斜角を算出する船体動揺検出部と、を有し、第2標準偏差修正部は、第2標準偏差を、傾斜角の増大に応じて増加させるように修正して、修正第2標準偏差としてマハラノビス距離算出部へ通知し、マハラノビス距離算出部は、第2標準偏差に代えて修正第2標準偏差を用いてマハラノビス距離を算出する、ことが好ましい。
【0030】
本発明は、その別の一態様においては、移動体に設置された衛星測位システムの受信機の測位信頼度を評価する測位信頼度評価装置による測位信頼度評価方法であって、測位信頼度評価装置が、受信機の出力に基づいて受信機の測位誤差を推定して、当該測位誤差を第1評価パラメータとして算出する第1評価パラメータ算出ステップと、測位信頼度評価装置が、衛星測位システムに依拠しない計測手段の出力に基づいて第2評価パラメータを算出する第2評価パラメータ算出ステップと、測位信頼度評価装置が、少なくとも第1評価パラメータとしての受信機の測位誤差および第2評価パラメータを含んだ評価対象データの、所定のデータ集合に対するマハラノビス距離を算出するマハラノビス距離算出ステップと、測位信頼度評価装置が、マハラノビス距離に基づいて受信機の測位信頼度を評価する信頼度評価ステップと、を有する、測位信頼度評価方法である。
【0031】
本発明は、そのさらに別の一態様においては、移動体に設置された衛星測位システムの受信機の測位信頼度を評価する測位信頼度評価装置のコンピュータが実行可能な測位信頼度評価プログラムであって、測位信頼度評価プログラムは、コンピュータを、受信機の出力に基づいて受信機の測位誤差を推定して、当該測位誤差を第1評価パラメータとして算出する第1評価パラメータ算出部と、衛星測位システムに依拠しない計測手段の出力に基づいて第2評価パラメータを算出する第2評価パラメータ算出部と、少なくとも第1評価パラメータとしての受信機の測位誤差および第2評価パラメータを含んだ評価対象データの、所定のデータ集合に対するマハラノビス距離を算出するマハラノビス距離算出部と、マハラノビス距離に基づいて受信機の測位信頼度を評価する信頼度評価部として機能させることを特徴とする、測位信頼度評価プログラムである。
【発明の効果】
【0032】
本発明は、衛星測位システム受信機測位信頼度評価装置の評価精度を向上させることができる。
【図面の簡単な説明】
【0033】
【図1】鉄道車両に設置された第1実施形態による評価装置を示す概略図
【図2】第1実施形態による評価装置のハードウェア構成の例を示すブロック図
【図3】第1実施形態による評価装置の機能的構成の例を示すブロック図
【図4】第1実施形態による評価装置が実行する測位信頼度評価処理のフローチャート
【図5】擬似距離、測位位置、擬似距離残差の関係を説明する概略図
【図6】自動車に設置された第2実施形態による評価装置を示す概略図
【図7】第2実施形態による評価装置の機能的構成の例を示すブロック図
【図8】航空機に設置された第3実施形態による評価装置を示す概略図
【図9】慣性航法装置のハードウェアおよび機能の構成例を示すブロック図
【図10】第3実施形態による評価装置の機能的構成の例を示すブロック図
【図11】船舶に設置された第4実施形態による評価装置を示す概略図
【図12】第4実施形態による評価装置の機能的構成の例を示すブロック図
【発明を実施するための形態】
【0034】
以下、本発明の実施の形態について、詳細に説明する。
【0035】
(概要)
本発明にかかる実施形態は、移動体に設置された、衛星測位システムであるGPS(Global Positioning System)用のGPS受信機(以下、誤認のおそれがない限り単に「受信機」と略称する。)の測位の信頼度評価のための装置(以下、単に「評価装置」と略称する。)である。評価装置は、受信機と接続され、受信機から、測位位置に関する情報(GPS測位位置情報)および測位誤差に関する情報(GPS測位誤差情報)を受け取ることができる。また、評価装置は、衛星測位システムから独立して(衛星測位システムに依らないで)移動体の状態(速度等)を計測することができる独立計測手段と接続され、当該独立計測手段が出力する移動体速度等に関する情報(独立計測情報)を、移動体の状態を示す情報として受け取ることができる。そして、評価装置は、GPS測位誤差情報および独立計測情報にもとづいて評価対象データを構成し、評価対象データの、正常標本データ集合に対するマハラノビス距離を算出し、当該マハラノビス距離に基づいて受信機の測位の信頼度を評価する。
【0036】
なお、正常標本データ集合は、受信機の測位信頼度評価に先立って予め用意される。正常標本データ集合は、GPSおよび独立計測手段が正常に機能していると考えられる状況において収集されたGPS測位誤差および独立計測情報等に基づいて構成される正常標本データが複数含まれる集合である。
【0037】
こうして、評価装置は、GPS由来のデータ(GPS測位誤差情報のデータ)および非GPS由来(独立計測手段等由来)のデータ(独立計測情報のデータ)を統一的尺度(マハラノビス距離)に統合し、当該統一的尺度に基づいた受信機測位信頼度評価を行うことが可能となる。これにより、評価装置は、受信機から取得したGPS測位誤差と独立計測手段から取得した情報から導出した移動体の状態を示す情報との相関を考慮して、より精度よく測位信頼度の評価を行うことが可能である。
【0038】
また、評価装置は、付加情報(GPS測位精度劣化予測情報(後述)、独立計測手段から提供される独立計測情報に基づく移動体加速度に関する情報、など)に基づき、予め準備され評価装置に保持された正常標本データ集合の統計量(正常標本データの各パラメータの平均、標準偏差等)のうち、特定のパラメータの統計量(標準偏差等)を修正し、修正された統計量を含んだ正常標本データ集合の統計量を用いて評価対象データの正常標本データ集合に対するマハラノビス距離を算出することができる。
【0039】
そうすることで、評価装置は、実際の信頼度よりも低く誤評価される(マハラノビス距離が不適切に大きくなる)可能性が高いと予想される状況で収集された評価対象データに対する信頼度評価において、誤って信頼度を不当に低く評価することを防止し、そのような状況においてもなお正確に受信機の測位信頼度の評価を行うことができる。
【0040】
(第1実施形態)
第1実施形態においては、評価装置は、移動体としての鉄道車両に設置される。図1は、鉄道車両201に設置された本実施形態による評価装置101および評価装置101に接続される機器の構成を示すブロック図である。
【0041】
(ハードウェア構成)
評価装置101は、衛星測位システム用受信機である受信機103と接続される。受信機103は、アンテナ部103aと接続され、GPS衛星が発する電波を受信することが可能になっている。
【0042】
また、評価装置101は、衛星測位システムに依らない独立計測手段であるヨーレートセンサ105、および、同じく衛星測位システムに依らない独立計測手段である速度発電機107(速度センサ)と接続される。ヨーレートセンサ105は、鉄道車両201の向きの経時変化を検知するためのセンサであって、鉄道車両201のヨーレートを評価装置101へ出力することができる。速度発電機107は、車軸107axの回転力から発電する発電機であり、車軸107axの回転数に応じた出力電圧を出力することができる。
【0043】
図2は、評価装置101のハードウェア構成の例を示すブロック図である。評価装置101は、データおよびプログラムを格納する主記憶装置3aおよび補助記憶装置3bを備える。主記憶装置3aは、例えば、リード・オンリー・メモリ(ROM)、ランダム・アクセス・メモリ(RAM)等でよい。補助記憶装置3bは、例えば、ハードディスクドライブ(HDD)、フレキシブルディスク(FD)およびそのドライブ装置、光ディスクおよびそのドライブ装置、不揮発性メモリ(NV−RAM)等でよい。中央処理装置1(CPU)は、記憶装置3aおよび3bのいずれかに格納された、測位信頼度評価プログラムを実行することにより、評価装置101の各種機能を実現する演算装置である。ただし、測位信頼度評価プログラムは、記憶装置3aおよび3bに格納されずとも、ネットワーク(不図示)および入力部5を介してCPU1にロードされてもよい。また、CPU1には、入力部5および出力部7が接続される。入力部5は、操作者からの情報の入力、外部デバイスからのデータ入力等を受け、当該入力をCPU1へ送ることができる。出力部7は、CPU1からデータ出力を受け、操作者への情報の出力、外部デバイスへのデータ出力等を行うことができる。評価装置101は、出力部7を介して評価結果を出力することができる。
【0044】
なお、評価装置101のハードウェア構成は、図2に示すような構成に限定されない。評価装置101は、例えば、1つまたは複数の専用集積回路として構成されることも可能である。
【0045】
(機能ブロックの構成)
図3は、CPU1が測位信頼度評価プログラムを実行することにより評価装置101に実現される機能を示したブロック図である。
【0046】
GPS測位誤差推定部11(評価パラメータ算出部、x1出力部)は、受信機103から所定のプロトコルに則ったデータ(例えば、NMEAデータ$GPGRS、$GPGSV、$GPGSA等)を受け取り、受け取ったデータに基づいてGPS測位誤差を推定する。このGPS測位誤差については、後で詳述する。
【0047】
GPS緯度経度算出部13(衛星測位位置算出部)は、受信機103からの情報に基づき、受信機による測位結果としての受信機103の位置の緯度および経度(GPS測位位置)を算出する。なお、GPS緯度経度算出部13は、受信機103の高度を算出することも可能である。
【0048】
センサヨーレート算出部15は、独立計測手段であるヨーレートセンサ105からの出力を受け、鉄道車両201の向きの経時的変化を独立計測ヨーレートとして算出する。
【0049】
速発速度算出部17は、独立計測手段である速度発電機107からの出力を受け、移動体(鉄道車両201)のその軌道に沿った方向についての速度を独立計測速度として算出する。
【0050】
速発加速度算出部19は、独立計測手段である速度発電機107からの出力を受け、移動体(鉄道車両201)のその軌道に沿った方向についての加速度を独立計測加速度として算出する。
【0051】
GPS測位誤差標準偏差修正部21(σ1修正部)は、予め評価装置101が保持する精度劣化予測情報データ(後述)と、GPS緯度経度算出部13が出力したGPS測位位置とに基づき、正常標本データ集合の統計量のうち、GPS測位誤差にかかるデータの標準偏差(σ1)を修正する。より具体的には、GPS測位誤差標準偏差修正部21は、正常標本データ集合におけるGPS測位誤差にかかるデータの標準偏差(σ1)に対する修正係数を決定する。
【0052】
(GPS測位精度劣化予測情報について)
鉄道車両、自動車といった移動体(陸上移動体)では、トンネル区間や森林地帯、市街地等における高層建築近傍においてGPS衛星の発する信号に対する受信状況が悪くなり、測位精度が劣化する傾向が見られる。つまり、受信状況は受信機の周囲の状況により劣化する傾向がある。そこで、評価装置101は、予め、地上における受信状況の劣化度(もしくは良好度)についての情報を数値化したデータを、該劣化度情報の指す位置を特定するための情報と関連付けて保持する。
【0053】
劣化度情報の指す位置は、緯度経度の情報によって特定されればよい。また、移動体が鉄道車両の場合には軌道と関連付けられた劣化度情報が示された軌道データを利用することができ、自動車のためには道路と関連付けられた劣化度情報が示された道路地図データを利用することができる。また、鉄道車両の場合、軌道と関連付けて(劣化度情報としての)軌道周囲の状況に関する情報が追加された軌道データを精度劣化予測情報データとして利用でき、自動車の場合、道路と関連付けて(劣化度情報としての)道路周囲の状況に関する情報が追加された道路地図データを精度劣化予測情報データとして利用できる。その他の移動体(航空機、船舶等を含む。)の場合には、受信状況の劣化度と、緯度・経度・高度等とが関連付けされたデータを精度劣化予測情報データとして利用すればよい。
【0054】
受信状況の劣化度は、非負の実数を用いて数値化されてよい。また、劣化度を示す数値は、その値が大きくなるほどに予測される受信状況の悪化の程度が大きくなるように数値化されてよい。つまり、最良の受信状況であることが予測される場合に劣化度の値はゼロとしてよい。また、劣化度の値は、周囲状況について、市街地<森林地帯<トンネル区間の順に大きくなるように設定されてよい。なお、劣化度に関する情報が無い位置については、劣化度の値としてゼロが与えられるようにしてよい。
【0055】
このようにしてGPS測位精度劣化予測情報51を予め準備しておき、GPS測位誤差標準偏差修正部21は、例えば、GPS測位位置に基づいてGPSが測位した位置近傍の精度劣化予測情報51を参照し、GPS測位位置が示す位置に関連付けられた精度劣化予測情報が示す劣化度の値が大きくなればなるほど、正常標本データ集合のGPS測位誤差にかかる検査項目パラメータの集合の標準偏差がより小さな値に修正されるように、修正係数を決定する。正常標本データ集合のGPS測位誤差にかかる検査項目パラメータの集合の標準偏差の値が小さな値に修正されることは、評価対象データの対応するパラメータ(ここでは、GPS測位誤差)がマハラノビス距離の長大化に寄与する程度をパラメータ相互間の相対性において高くする効果がある。つまり、評価装置101は、GPS測位の精度劣化が予想される(GPS測位の誤差が大きくなることが予め判っている)場所で収集した評価対象データに対する測位信頼度の評価では、正常標本データ集合のGPS測位誤差にかかる検査項目パラメータの集合の標準偏差をより小さくすることで、GPS測位の精度劣化をより鋭敏に評価結果に反映させる。
【0056】
こうすることで、評価装置101においては、正常標本データ集合における「GPS測位誤差」のデータについての標準偏差(σ1)は、受信状況の劣化度の関数として受信状況の劣化度の悪化に応じて減少するように修正されることが可能になる。
【0057】
正常標本データ集合における「GPS測位誤差」のデータの標準偏差をσ1、GPS測位位置pにおける受信状況の劣化度の値をf(p)、「GPS測位誤差」のデータの修正された標準偏差をσ1’とすれば、σ1’は、
σ1’=(1/(1+f(p)))×σ1 ・・・・・ (1)
と表される。つまり、GPS測位誤差標準偏差修正部21は、上記式(1)における(1/(1+f(p)))の値を決定する。
【0058】
これにより、評価装置101は、移動体の状態として受信状況が悪いと予測される状況で収集された評価対象データに対する信頼度評価について誤って信頼度を不当に高く評価することを防止し、そのような状況においてもなお正確に受信機の測位信頼度の評価を行うことができる。
【0059】
GPS測位−実軌道間距離算出部23(評価パラメータ算出部、x3出力部)は、GPS測位位置と、鉄道の軌道の緯度・経度(高度は任意。)が示され軌道データ保持部53に保持される軌道データとに基づき、GPS測位位置と実際の軌道との乖離(GPS測位−実軌道間距離)を算出する。GPS測位−実軌道間距離は、GPS測位位置と実軌道との距離(射影量)でよく、軌道の湾曲等で射影量と考えられる量が複数得られる場合には、そのうちで最小の量をGPS測位−実軌道間距離としてよい。
【0060】
GPSヨーレート算出部25は、評価対象データの取得時における鉄道車両201の向きの経時的変化を、該取得時近傍の複数の相異なる時刻におけるGPS測位位置の差分に基づいて算出する(GPSヨーレート)。
【0061】
GPS速度算出部27は、評価対象データの取得時における鉄道車両201の速度を、該取得時近傍の複数の相異なる時刻におけるGPS測位位置の差分に基づいて算出する(GPS速度)。
【0062】
上記より明らかだが、軌道データ保持部53は、鉄道の軌道が敷設された緯度・経度(および高度)の情報が示された軌道データを保持する。軌道データは、さらに、軌道の曲率に関するデータを含むことが望ましい。
【0063】
GPS測位−実軌道間距離標準偏差修正部31(σ3修正部)は、GPS測位位置に基づき、当該GPS測位位置に最も近い(上述の実軌道間距離だけ離れた)軌道上の一点の曲率(R)を軌道データ保持部53より取得し、当該一点における軌道の曲率Rに基づき、正常標本データ集合のGPS測位−実軌道間距離にかかるデータの標準偏差(σ3)を修正する。より具体的には、GPS測位−実軌道間距離標準偏差修正部31は、正常標本データ集合におけるGPS測位−実軌道間距離にかかるデータの標準偏差(σ3)に対する修正量を決定する。
【0064】
鉄道車両では、湾曲した(非直線の)軌道を走行中、車両を傾斜させて走行する。車両の傾斜は、受信機のアンテナ部103aの位置にも影響を及ぼす。傾斜による軌道に対するアンテナ部103aの位置の変化は、GPSの測位の誤差として認識されてしまう可能性がある。このことは、湾曲した軌道を走行する受信機の測位信頼度は、直線軌道走行中よりも、不適切に低く評価される可能性があることを意味する。そこで、評価装置101は、例えば、走行中の軌道の曲率Rが大きくなればなるほど、正常標本データ集合のGPS測位−実軌道間距離にかかるデータの標準偏差(σ3)がより大きな値に修正されるように、修正量を決定する。標準偏差の値が大きな値に修正されることは、評価対象データの対応するパラメータ(ここでは、GPS測位−実軌道間距離)がマハラノビス距離の長大化に寄与する程度をパラメータ相互間の相対性において低くする効果がある。
【0065】
こうすることで、評価装置101においては、正常標本データ集合における「GPS測位−実軌道間距離」にかかるデータの標準偏差(σ3)は、鉄道車両201が在線する軌道上の一点の曲率の関数として曲率の増加に応じて増大するように修正されることが可能になる。
【0066】
正常標本データ集合における「GPS測位−実軌道間距離」のデータの標準偏差をσ3、GPS測位位置pに最近接する軌道上の一点における曲率をR(p)、「GPS測位−実軌道間距離」のデータの修正された標準偏差をσ3’とすれば、σ3’は、
σ3’=k3×R(p)+σ3 (k3:調整パラメータ(後述))・・・(2)
と表される。つまり、GPS測位−実軌道間距離標準偏差修正部31は、上記式(2)におけるk3×R(p)の値を決定する。
【0067】
これにより、評価装置101は、湾曲した軌道を走行するために傾斜した鉄道車両において収集された評価対象データに対する信頼度評価について誤って信頼度を不当に低く評価することを防止し、鉄道車両が傾斜するような状況においてもなお正確に受信機の測位信頼度の評価を行うことができる。
【0068】
ヨーレート差算出部33(評価パラメータ算出部、x4出力部)は、GPSヨーレート算出部25が出力するGPSヨーレートと、センサヨーレート算出部15が出力する独立計測ヨーレートとに基づき、これら2つのヨーレートの差を算出して、ヨーレート差(x4)として出力する。
【0069】
速度差算出部35(評価パラメータ算出部、x2出力部)は、GPS速度算出部27が出力するGPS速度と、速発速度算出部17が出力する独立計測速度とに基づき、これら2つの速度の差を算出して、速度差(x2)として出力する。
【0070】
速度差標準偏差修正部37(σ2修正部)は、速発加速度算出部19が出力する独立計測加速度に基づき、正常標本データ集合の統計量のうち、速度差にかかるデータの標準偏差(σ2)を修正する。より具体的には、速度差標準偏差修正部37は、正常標本データ集合におけるGPS速度と独立計測速度との速度差にかかるデータの標準偏差(σ2)に対する修正量を決定する。
【0071】
鉄道車両の独立速度計測手段である速度発電機107は、既知の径を有する車輪と接続された車軸の単位時間あたり回転数に基づいて独立計測速度を計測する計測手段である。そのため、鉄道車両が加減速中に車輪がスリップして滑走することで速度発電機107の速度計測の精度は著しく劣化する。また、低速度での運転中や、車軸が接続された車輪の径が変化したりすることでも速度発電機107の速度計測の精度が悪化することが知られている。
【0072】
速度発電機107の速度計測の精度の変化は、GPSによる測位から求めたGPS速度の誤差の変化として誤認識される可能性がある。このことは、軌道に沿った方向に加減速中の受信機の測位信頼度は、軌道に沿った方向に定速走行中よりも、不適切に低く評価される可能性があることを意味する。そこで、評価装置101は、例えば、軌道に沿った方向の鉄道車両の加速度(の絶対値)が大きくなればなるほど、正常標本データ集合の速度差にかかる検査項目パラメータの集合の標準偏差がより大きな値に修正されるように、修正量を決定する。標準偏差の値が大きな値に修正されることは、評価対象データの対応するパラメータ(ここでは、速度差)がマハラノビス距離の長大化に寄与する程度をパラメータ相互間の相対性において低くする効果がある。
【0073】
こうすることで、評価装置101においては、正常標本データ集合における「速度差」にかかるデータの標準偏差(σ2)は、鉄道車両201の加速度(の絶対値)の関数として加速度(の絶対値)の増大に応じて増大するように修正されることが可能になる。
【0074】
正常標本データ集合における「速度差」のデータの標準偏差をσ2、鉄道車両の(独立計測)加速度をa、「速度差」のデータの修正された標準偏差をσ2’とすれば、σ2’は、
σ2’=k2×|a|+σ2 (k2:調整パラメータ(後述)) ・・・(3)
と表される。つまり、速度差標準偏差修正部37は、上記式(3)におけるk2×|a|の値を決定する。
【0075】
これにより、評価装置101は、軌道に沿った方向において独立計測手段から加速度が検出された加減速中の鉄道車両において収集された評価対象データに対する信頼度評価について誤って信頼度を不当に低く評価することを防止し、鉄道車両が加減速中の状況においてもなお正確に受信機の測位信頼度の評価を行うことができる。
【0076】
マハラノビス距離算出部41は、評価対象データの、正常標本データ集合に対するマハラノビス距離を算出する。
【0077】
ここでの評価対象データは、
GPS測位誤差推定部11が出力するGPS測位誤差(x1)、
速度差算出部35が出力する速度差(x2)、
GPS測位−実軌道間距離算出部23が出力するGPS測位−実軌道間距離(x3)、
ヨーレート差算出部33が出力するヨーレート差(x4)、
をパラメータとして含むベクトル量である。
【0078】
また、正常標本データ集合の統計量は、正常標本データ保持部55に保持される。該当計量は、正常標本データ集合における各パラメータ(検査項目パラメータ)の平均および標準偏差であって、
正常標本データ集合のGPS測位誤差平均(m1)、
正常標本データ集合の速度差平均(m2)、
正常標本データ集合のGPS測位−実軌道間距離平均(m3)、
正常標本データ集合のヨーレート差平均(m4)、
正常標本データ集合のGPS測位誤差標準偏差(σ1)、
正常標本データ集合の速度差標準偏差(σ2)、
正常標本データ集合のGPS−測位実軌道間距離標準偏差(σ3)、
正常標本データ集合のヨーレート差標準偏差(σ4)、である。
【0079】
また、正常標本データ保持部55は、式(3)における調整パラメータk2の値、および、式(2)における調整パラメータk3の値を保持する。
【0080】
そして、マハラノビス距離算出部41は、評価対象データのマハラノビス距離の算出において、
正常標本データ集合のGPS測位誤差平均(m1)、
正常標本データ集合の速度差平均(m2)、
正常標本データ集合のGPS測位−実軌道間距離平均(m3)、
正常標本データ集合のヨーレート差平均(m4)、
修正GPS測位誤差標準偏差(σ1’)、(式(1)参照。)
修正速度差標準偏差(σ2’)、(式(3)参照。)
修正GPS−測位実軌道間距離標準偏差(σ3’)、(式(2)参照。)
正常標本データ集合のヨーレート差標準偏差(σ4)、
を用いる。
【0081】
信頼度評価部43は、マハラノビス距離算出部41が算出した、評価対象データの正常標本データ集合に対するマハラノビス距離に基づき、受信機の測位信頼度を評価する。具体的には、信頼度評価部43は、マハラノビス距離が大きくなればなるほど、測位信頼度を低く評価するように、評価を行う。例えば、評価部43は、所定の閾値を1つまたは複数設け、2レベルまたはより多くのレベルで測位信頼度を評価する。
【0082】
(正常標本データの収集および正常検査項目パラメータの標準偏差の決定処理)
これより、評価対象データに基づく測位信頼度評価に先立って予め収集される正常標本データおよびその集合の具体例、ならびに、正常標本データ集合の所定の検査項目パラメータの標準偏差に対する調整パラメータ(k2(式(3))、k3(式(2)))の決定の具体例を示す。
【0083】
先ず、受信機が搭載された移動体(例えば、鉄道車両201)を、視界が開けた直線軌道上において、軌道方向に沿った方向について定速度で走行させる。そして、定速度走行中の鉄道車両において検査項目パラメータ(GPS測位誤差、速度差平均、GPS測位−実軌道間距離、ヨーレート差)のデータを収集する。これらのパラメータで構成されるデータが正常標本データとなる。このデータ収集作業を複数回実行する。複数回実行後に集まった複数の正常標本データが正常標本データ集合を構成する。
【0084】
検査項目パラメータを4つ、データ収集作業をn回実行すれば各検査項目パラメータについてn個ずつ、トータル4n個のデータが得られる。この4n個のデータから、各検査項目について、平均、および、標準偏差を求める。
【表1】
【0085】
上記4n個のデータが、正常標本データ集合を構成するデータとして用いられる。つまり、ここで求めた平均mi(i:1〜4)および標準偏差σi(i:1〜4)が、正常標本データ集合の各パラメータの平均および標準偏差である。正常データ保持部55は、これら平均mi(i:1〜4)および標準偏差σi(i:1〜4)を、正常標本データ集合を表す統計量として保持すればよい。
【0086】
(調整パラメータk2の決定処理)
次に、受信機が搭載された移動体(例えば、鉄道車両201)を、視界が開けた直線軌道上において、軌道方向に沿った方向についてその加速度の絶対値が|a0|(a0はゼロ以外の実数。)になるように加減速走行させる。そして、加減速走行中の鉄道車両において検査項目パラメータのうち、少なくとも検査項目「速度差」(上表における「検査項目2」)のデータを収集する。このデータ収集作業は、na回実行される(naは、自然数)。なお、実行回数(na)は、2以上であることが望ましい。
【0087】
この収集作業をna回実行すれば、少なくとも検査項目2パラメータについてのna個のデータが得られる。(下表に示すデータd2a1〜d2anaが得られる。)
【表2】
【0088】
この結果にもとづいて、式(3)に含まれる調整パラメータk2を決定する。
【0089】
上記定加速度走行データの集合(データd2a1〜d2ana)の、正常標本データ集合(定速直線走行データ)における上記データ集合と対応する検査項目パラメータ((検査項目2)のデータ(d21〜d2n))の平均値(平均m2)に対する標準偏差(σ2a)を次式より求める。
【数1】
【0090】
そして、式(4)より求めた標準偏差σ2a、正常標本データ集合を表す統計量のうち検査項目2「速度差」にかかる標準偏差σ2、定加速度走行データ収集にかかる加速度a0を用い、次式、
σ2a=k2×|a0|+σ2 ・・・ (5)、
を満足するk2を求め、該k2を調整パラメータk2とする。式(5)より決定された調整パラメータk2は、正常データの一部を構成するデータとして、正常データ保持部55に保持される。
【0091】
(調整パラメータk3の決定処理)
最後に、受信機が搭載された移動体(例えば、鉄道車両201)を、視界が開けた曲線軌道(曲率R0)上において、軌道方向に沿った方向について定速で走行させる。そして、曲率R0の曲線軌道上を定速走行中の鉄道車両において検査項目パラメータのうち、少なくとも検査項目「実軌道との距離」(上表における「検査項目3」)のデータを収集する。このデータ収集作業は、nR回実行される(nRは、自然数)。なお、実行回数(nR)もまた、2以上であることが望ましい。
【0092】
この収集作業をnR回実行すれば、少なくとも検査項目3パラメータについてのnR個のデータが得られる。(下表に示すデータd3R1〜d3RnRが得られる。)
【表3】
【0093】
この結果にもとづいて、式(2)に含まれる調整パラメータk3を決定する。上記定速曲線走行データの集合(データd3R1〜d3RnR)の、正常標本データ集合(定速直線走行データ)における上記データ集合と対応する検査項目パラメータ((検査項目3)のデータ(d31〜d3n))の平均値(平均m3)に対する標準偏差(σ3R)を次式より求める。
【数2】
【0094】
そして、式(6)より求めた標準偏差σ3R、正常標本データ集合を表す統計量のうち検査項目3「実軌道との距離」にかかる標準偏差σ3、定速曲線走行データ収集にかかる曲率R0を用い、次式、
σ3R=k3×R0+σ3 ・・・ (7)、
を満足するk3を求め、該k3を調整パラメータk3とする。式(7)より決定された調整パラメータk3は、正常データの一部を構成するデータとして、正常データ保持部55に保持される。
【0095】
(測位信頼度評価処理フロー)
次に、図4を参照し、評価装置101によるマハラノビス距離に基づく受信機の測位信頼度評価にかかる処理について説明する。図4は、評価対象データを構成する検査項目パラメータのデータ収集から測位信頼度評価までの処理の流れを示すフローチャートである。
【0096】
ステップS101において、GPS測位誤差推定部11(x1出力部)は、受信機103から受け取ったデータに基づいてGPS測位誤差を推定して、マハラノビス距離算出部41へ出力する。
【0097】
(GPSによる測位位置にかかる測位誤差の推定)
ここでGPS測位誤差について説明する。
【0098】
GPS衛星による受信機位置(GPS測位位置)の導出では、受信機103は、複数のGPS衛星と受信機103間の距離を測定して、三角測量の原理で受信機位置(GPS測位位置)を特定して求めている。ここでのGPS測位誤差は、GPS衛星から発信された信号から計算した直線距離(擬似距離r)と、受信機が測位位置として最終的に決定したGPS測位位置に基づく受信機と衛星間の直線距離との差(擬似距離残差Δr)およびGPS衛星配置から計算することができる。また、一般的な受信機には、上記諸量を計算するための出力がNEMAデータ($GPGRS、$GPGSV、$GPGSAとして標準で出力可能である。(非特許文献1参照。)
【0099】
図5は、擬似距離rと擬似距離残差Δrとの関係を説明するための模式図である。受信機が受信可能なGPS衛星がN機あるとする。
【0100】
衛星i(iは、1からNの整数。)と受信機103との間の距離ri[m]の関係は、受信機位置を(x,y,z)、衛星iの位置を(xi,yi,zi)、受信機103が内蔵する時計の時間誤差δ[sec]に対応する距離誤差をs=c・δ[m](cは光速)とすると、
【数3】
と表される。
【0101】
このときriの変化量Δriと、x、y、z、sの変化量Δx、Δy、Δz、Δsとの関係は、
【数4】
ただし、
【数5】
となる。
【0102】
受信機が計測した距離ri(擬似距離)をrim、rimをもとに決定したGPS位置および時計誤差を(xc,yc,zc,sc)としたとき、rimと、(xc,yc,zc,sc)から式(1)で計算した距離ricとの差、すなわち擬似距離残差Δri=rim−ricをN個縦に並べた擬似距離残差ベクトルΔr=(Δr1,Δr2,・・・,ΔrN)Tと測位誤差ベクトルΔx=(Δx,Δy,Δz,Δs)Tとの関係が
【数6】
と求まる。
【0103】
ここで、行列Gは
【数7】
である。
【0104】
li、mi、niはそれぞれ衛星iと受信機103とを結ぶ直線のx軸、y軸、z軸に対する方向余弦である。
【0105】
よって、li、mi、niは、受信機103から見た衛星iの仰角(elevation)をeli、北をゼロとした方位角(azimuth)をaziとして、
【数8】
から求めることができる。
【0106】
連立方程式(11)の解は最小二乗法により
【数9】
で求めることができる。
【0107】
擬似距離残差Δriは、NMEAデータ$GPGRSとして受信機103から出力され、仰角eliおよび方位角aziは、NMEAデータ$GPGSVとして受信機103から出力されるので、GPS測位誤差推定部11は、リアルタイムで行列G、すなわち、((GTG)−1GT)を求めることができる。式(14)の数値計算においては、特異値分解で擬似逆行列((GTG)−1GT)を直接求めることができる。また、A=GTG,b(ベクトル)=GTΔr(ベクトル)とおいてAΔx=bの連立一次方程式をLU分解で求めてもよい。
【0108】
なお、鉄道車両のように移動体のGPS測位位置について高度を考慮する必要がない場合には、式(14)で示されるGPS測位誤差ベクトルのうち、水平方向成分のみを抽出して、水平面に関する測位誤差dERRH
【数10】
をGPS測位誤差として用いてもよい。
【0109】
図4に戻り、ステップS103において、速度差算出部35(x2出力部)は、速度差(x2)を、マハラノビス距離算出部41へ出力する。
【0110】
ステップS105において、GPS測位−実軌道間距離算出部23は、GPS測位−実軌道間距離(x3)を、マハラノビス距離算出部41へ出力する。
【0111】
ステップS107において、ヨーレート差算出部33は、ヨーレート差(x4)を、マハラノビス距離算出部41へ出力する。
【0112】
ステップS109において、GPS測位誤差標準偏差修正部21は、精度劣化予測情報データ保持部51に保持された精度劣化予測情報を参照して、GPS測位位置pにおける劣化度の値f(p)を求め、前述の式(1)より、修正GPS測位位置標準偏差σ1’を決定する。決定したσ1’は、マハラノビス距離算出部41に通知される。
【0113】
ステップS111において、速発加速度算出部19は、鉄道車両201の独立計測加速度を算出して、速度差算出部35へ出力する。
【0114】
ステップS113において、速度差標準偏差修正部37(σ2修正部)は、独立計測加速度aを用いて、前述の式(3)より、修正速度差標準偏差σ2’を決定する。決定したσ2’は、マハラノビス距離算出部41に通知される。
【0115】
ステップS115において、GPS−実軌道間距離標準偏差修正部31は、GPS測位位置に基づき、鉄道車両201が在線する軌道上の位置を推定し、当該位置における軌道の曲率を軌道データ保持部53に保持された軌道データを参照して決定し、その曲率をR(p)として、前述の式(2)より、修正実軌道間距離標準偏差σ3’を決定する。決定したσ3’は、マハラノビス距離算出部41に通知される。
【0116】
ステップS117において、マハラノビス距離算出部41は、評価対象データ(x1,x2,x3,x4)の正常標本データ集合に対するマハラノビス距離を算出する。なお、マハラノビス距離算出部41は、正常標本データ集合の統計量として平均(m1,m2,m3,m4)および標準偏差(σ1’,σ2’,σ3’,σ4)を用いて評価対象データのマハラノビス距離を算出してもよい。算出したマハラノビス距離は、信頼度評価部43へ送られる。
【0117】
ステップS119において、信頼度評価部43は、マハラノビス距離算出部41から受けたマハラノビス距離の大きさに基づいて、受信機103の測位の信頼度を評価する。
【0118】
このように、評価装置101は、評価対象データ(GPS測位誤差および独立計測情報)についての正常標本データ集合に対するマハラノビス距離に基づいて受信機の測位信頼度の評価を行うことができる。そうすることで、評価装置101においては、GPS測位誤差に加えて評価対象データが取得されたときの移動体の状態を考慮した測位信頼度の評価が可能になっている。
【0119】
また、評価装置101は、独立計測手段等の計測データをもとに移動体の状態を考慮して、マハラノビス距離の算出にかかる評価対象データのパラメータ相互間の相対的な重み(標準偏差)を変更することができ、より適切な測位信頼度の評価が可能になっている。
【0120】
(マハラノビス距離の計算について)
ここで、ステップS117においてマハラノビス距離算出部41が算出するマハラノビス距離の算出の方法について説明する。
(正常標本データ集合の統計量について)
k個のデータ項目(検査項目)について、n個の正常標本データが収集されているとする。
【表4】
ここで、mjは、検査項目j(j:1〜kの整数。)のデータの平均、σjは、検査項目j(j:1〜kの整数。)のデータの標準偏差であって、
【数11】
である。
【0121】
次に、正常標本データについて、
【数12】
の正規化を行う。正規化後の正常標本データを下表に示す。
【表5】
【0122】
次に、行列{d’ji}の相関行列C={rji}を計算する。このとき、対角項は1、rji=rijである。
【数13】
そして、さらに、行列Cの逆行列C−1を計算しておく。
【0123】
(対象データの正常標本データ集合に対するマハラノビス距離の算出について)
マハラノビス距離の算出の対象となるデータをデータx=(x1,x2,・・・,xk)とする。先ず、データxを式(19)のようにして正規化する。
【数14】
【0124】
正規化された対象データx’について、正常標本データ集合に対するマハラノビス距離を次式より算出する。マハラノビス距離をDとして、
【数15】
【0125】
本実施形態による評価装置101は、物理的な単位が相異なる複数のデータを、マハラノビス距離として統合することができ、1つの統一的な尺度に基づく測位信頼度の定量的評価が可能になっている。これにより、評価結果の信頼性もまた向上される。
【0126】
さらに、本実施形態による評価装置101は、評価対象データの収集時に受信機の測位の精度が劣化していると予測される場合には、評価対象データにおける受信機の測位に基づく検査項目と対応する正常標本データの検査項目の標準偏差の大きさがより小さくなるように修正することにより当該検査項目のマハラノビス距離における他の検査項目に対する相対的な重みを重くして当該受信機の測位精度の劣化がより鋭敏に評価結果に反映されるようにし、また、評価対象データの収集時に独立計測手段の計測の精度が劣化していると予測される場合には、評価対象データにおける独立計測手段の計測に基づく検査項目と対応する正常標本データの検査項目の標準偏差の大きさがより大きくなるように修正することにより当該検査項目のマハラノビス距離における他の検査項目に対する相対的な重みを軽くして当該独立計測手段の計測精度の劣化が敏感に評価結果に反映されないようにする。そうすることで、測位信頼度の評価の精度をよく保つことが可能になっている。
【0127】
また、本実施形態による評価装置101は、上記した検査項目パラメータに限らず、如何なる単位を有する量でも測位信頼度評価の検査項目パラメータとして容易に導入可能である。これにより、評価装置101は、顕著な汎用性を有するものとなっている。
【0128】
(第2実施形態)
第2実施形態においては、評価装置は、移動体としての自動車に設置される。図6は、自動車301に設置された本実施形態による評価装置101aおよび評価装置101aに接続される機器の構成を示すブロック図である。以下の説明においては、第1実施形態と同様の構成・動作・効果等については適宜説明を省略する。
【0129】
(ハードウェア構成)
評価装置101aは、衛星測位システム用受信機である受信機103と接続される。
【0130】
また、評価装置101aは、衛星測位システムに依らない独立計測手段である走行速度計107aと接続される。走行速度計107aは、速度発電機107と同様に、車軸107axの回転力から自動車の走行速度の情報(速度計速度)を出力することができる。評価装置101aは、自動車301が定常的な横滑り運動を行うことは無いものと仮定し、GPS速度に対応する独立計測情報として走行速度計107aによる速度計速度を利用する。
【0131】
(機能ブロックの構成)
図7は、評価装置101aが備える機能を示したブロック図である。
【0132】
評価装置101aにおけるGPS測位誤差推定部11、GPS緯度経度算出部13、速度計測度算出部17a、速度計加速度算出部19a、GPS測位誤差標準偏差修正部21、GPS速度算出部27、速度差算出部35、速度差標準偏差修正部37、マハラノビス距離算出部41、信頼度評価部43、精度劣化予測情報データ保持部51、正常データ保持部55、については、第1実施形態における対応ブロックと同様の動作を行う。
【0133】
マップマッチング移動距離算出部23a(評価パラメータ算出部)は、GPS緯度経度算出部13が出力するGPS測位位置、および、道路地図データ保持部53が保持する道路地図データに基づき、GPS測位位置を道路上の一点へ移動させるマップマッチングを行い、当該マップマッチングでGPS測位位置が移動させられた距離(マップマッチング移動距離x3)を算出する。
【0134】
マップマッチング移動距離標準偏差修正部31a(σ3修正部)は、上記マップマッチング移動距離算出部23aが行ったマップマッチングにかかる移動先の道路上の一点の、位置特定困難度が高くなるにつれて、マップマッチング移動距離標準偏差(σ3)がより大きくなるように、マップマッチング移動距離標準偏差(σ3)を修正し、修正された当該標準偏差を修正マップマッチング移動距離標準偏差(σ3’)としてマハラノビス距離算出部41へ通知する。例えば、修正部31aは、位置特定困難度として、GPS測位位置のマップマッチングによる移動先の道路上の一点の道路幅(例えば、車線数)を利用してよい。
【0135】
正常標本データ集合における「マップマッチング移動距離」のデータの標準偏差をσ3、GPS測位位置pがマップマッチングにより移動された先の道路上の一点における位置特定困難度をW(p)、「マップマッチング移動距離」のデータの修正された標準偏差をσ3’とすれば、σ3’は、
σ3’=k3×W(p)+σ3 (k3:調整パラメータ) ・・・・ (2’)
と表される。調整パラメータk3は、正常標本データとは異なる位置特定困難度を有する道路(例えば、車線数が正常標本データ収集に用いた道路よりも多い道路)を用いて収集したデータに基づいて評価されればよい。そして、マップマッチング移動距離標準偏差修正部31aは、上記式(2’)におけるk3×W(p)の値を決定する。位置特定困難度W(p)は、道路の幅もしくは車線数が大きくなるにつれ増大するように設定すればよい。
【0136】
上記より明らかだが、道路地図データ保持部53は、道路の緯度・経度(および高度)の情報が示された道路地図データを保持する。道路地図データは、さらに、道路の幅や車線数に関するデータを含むことが望ましい。
【0137】
マハラノビス距離算出部41は、評価対象データの、正常標本データ集合に対するマハラノビス距離を算出する。
【0138】
ここでの評価対象データは、
GPS測位誤差推定部11が出力するGPS測位誤差(x1)、
速度差算出部35が出力する速度差(x2)、
マップマッチング移動離算出部23が出力するマップマッチング移動距離(x3)、
をパラメータとして含むベクトル量である。
【0139】
また、正常標本データ集合の統計量は、正常標本データ保持部55に保持される。該当計量は、正常標本データ集合における各パラメータ(検査項目パラメータ)の平均および標準偏差であって、
正常標本データ集合のGPS測位誤差平均(m1)、
正常標本データ集合の速度差平均(m2)、
正常標本データ集合のマップマッチング移動距離(m3)、
正常標本データ集合のGPS測位誤差標準偏差(σ1)、
正常標本データ集合の速度差標準偏差(σ2)、
正常標本データ集合のマップマッチング移動距離標準偏差(σ3)、である。
【0140】
また、正常標本データ保持部55は、式(3)における調整パラメータk2の値、および、式(2’)における調整パラメータk3の値を保持する。
【0141】
そして、マハラノビス距離算出部41は、評価対象データのマハラノビス距離の算出において、
正常標本データ集合のGPS測位誤差平均(m1)、
正常標本データ集合の速度差平均(m2)、
正常標本データ集合のGPS測位−実軌道間距離平均(m3)、
修正GPS測位誤差標準偏差(σ1’)、(式(1)参照。)
修正速度差標準偏差(σ2’)、(式(3)参照。)
修正GPS−測位実軌道間距離標準偏差(σ3’)、(式(2’)参照。)
を用いる。
【0142】
評価装置101aの信頼度評価部43は、第1実施形態による評価装置101の信頼度評価部43と同様に、マハラノビス距離算出部41が算出した、評価対象データの正常標本データ集合に対するマハラノビス距離に基づき、受信機の測位信頼度を評価する。
【0143】
本実施形態では、道路幅が広くてマップマッチングによって移動される道路上の一点に比較的大きな誤差が含まれる可能性が高い状況、かつ/または、移動体が加速中であって走行速度計107aの計測した速度に比較的大きな誤差が含まれる可能性が高い状況で計測された評価対象データについては、マップマッチング移動距離、および/または、速度差のマハラノビス距離における相対的な重みを軽くすることで、評価装置101aが誤って受信機103の測位信頼度を過小評価することを防止することができる。
【0144】
(第3実施形態)
第3実施形態においては、評価装置は、移動体としての航空機に設置される。図8は、航空機401に設置された本実施形態による評価装置101bおよび評価装置101bに接続される機器の構成を示すブロック図である。以下の説明においては、第1および/または第2の実施形態と同様の構成・動作・効果等については適宜説明を省略する。
【0145】
(ハードウェア構成)
評価装置101bは、衛星測位システム用受信機である受信機103と接続される。
【0146】
また、評価装置101bは、衛星測位システムに依らない独立計測手段である慣性航法装置109と接続される。慣性航法装置109は、航空機401の水平・垂直速度を成分とする三次元速度ベクトルVINSを出力することができる。評価装置101bは、GPS速度に対応する独立計測情報として慣性航法装置109から得た三次元速度ベクトルVINSを利用する。
【0147】
(慣性航法装置について)
図9は、慣性航法装置109の動作を示すブロック図である。慣性航法装置109は、センサ部111として、三軸方向について計測可能な加速度計111aおよびジャイロスコープ111bを備える。加速度計111aの出力は、各軸加速度導出部113へ送られ、各軸加速度導出部113が当該三軸方向についての加速度を導出する。導出された三軸方向加速度は、水平・垂直加速度導出部115へ送られる。
【0148】
他方、ジャイロスコープ111bは、各軸まわりの角速度を検知して出力する。ジャイロスコープ111bが検知した三軸まわりの角速度は、各軸角速度導出部123へ送られ、各軸角速度導出部123が三軸まわりの角速度を決定する。そして、三軸まわりの角速度は各軸姿勢角導出部121へ送られる。各軸姿勢角導出部121は、三軸まわりの角速度を時間方向に積分することにより、航空機401の姿勢角を導出する。導出された姿勢角は、水平・垂直加速度導出部115へ送られる。
【0149】
水平・垂直加速度導出部115は、姿勢角に基づき、三軸方向加速度を、水平(N、E)および垂直(Az)方向の加速度(aN,aE,aAz)に変換し、水平・垂直加速度として出力部127および水平・垂直速度導出部117へ送る。
【0150】
水平・垂直速度導出部117は、水平・垂直加速度(aN,aE,aAz)を時間方向に積分することにより、水平・垂直速度(vN,vE,vAz)(=三次元速度ベクトルVINS)を導出し、水平・垂直速度として出力部127および水平・垂直移動距離導出部119へ送る。
【0151】
水平・垂直移動距離導出部119は、水平・垂直速度(vN,vE,vAz)を時間方向に積分することにより、水平・垂直移動距離(drN,drE,drAz)を導出し、出力部127へ水平・垂直移動距離として出力部127へ送る。また、水平・垂直移動距離導出部119は、慣性航法装置109の起算点の位置ベクトルr0=(r0N,r0E,r0Az)を保持してもよく、その場合には、航空機401の位置ベクトルrINS=(rN,rE,rAz)=(drN,drE,drAz)+r0を出力部127へ出力することができる。
【0152】
このように、慣性航法装置109は、水平方向(N,E)および垂直方向(Az)についての加速度・速度・移動距離を示す各ベクトル、ならびに、航空機401の位置を示す位置ベクトルを出力することが可能である。ただし、慣性航法装置109が出力する速度や位置は、センサ部111が計測した加速度を積分して得られる量であるため、慣性航法装置109が起動されてからの時間が長くなるにつれ誤差が大きくなることがある。
【0153】
また、慣性航法装置109は、慣性航法装置109が起動されてからの時間を計測して出力するタイマ部125を備えることも可能である。なお、このタイマ部125は必須ではない。慣性航法装置109がタイマ部125を備えない場合には、評価装置101b(後述)が、慣性航法装置109が起動されてからの時間を計測して出力するタイマ部125に相当する構成を備えればよい。
【0154】
(機能ブロックの構成)
図10は、評価装置101bが備える機能を示したブロック図である。
【0155】
評価装置101bにおけるGPS測位誤差推定部11、GPS緯度経度算出部13a、GPS測位誤差標準偏差修正部21、マハラノビス距離算出部41、信頼度評価部43、精度劣化予測情報データ保持部51、については、第1実施形態における対応ブロックと同様の動作を行う。ただし、GPS緯度経度算出部13aは、緯度および経度に加えて、高度についてのGPS測位位置も出力する。
【0156】
また、本実施形態においては、正常データ保持部55は、正常標本データ集合の統計量として、以下の項目を保持すればよい。
・ 高度にかかる測位誤差を含めたGPS測位誤差平均(m1)、
・ 水平(N,E)および垂直(Az)方向の3成分についての速度差平均(m2N,m2E,m2Az)、
・ 水平(N,E)および垂直(Az)方向の3成分についてのGPS測位と独立計測手段(慣性航法装置109)による測位との位置誤差平均(m3N,m3E,m3Az)、
・ 高度にかかる測位誤差を含めたGPS測位誤差標準偏差(σ1)、
・ 水平(N,E)および垂直(Az)方向の3成分についての速度差標準偏差(σ2N,σ2E,σ2Az)、
・ 水平(N,E)および垂直(Az)方向の3成分についてのGPS測位と独立計測手段(慣性航法装置109)による測位との位置誤差標準偏差(σ3N,σ3E,σ3Az)
【0157】
さらに、正常データ保持部55は、速度差標準偏差(σ2N,σ2E,σ2Az)にかかる調整パラメータとして調整パラメータk2=(k2N,k2E,k2Az)と、位置誤差標準偏差(σ3N,σ3E,σ3Az)にかかる調整パラメータとして調整パラメータk3=(k3N,k3E,k3Az)を備えてもよい。正常標本データは、慣性航法が開始された直後の時点において計測されればよい。また、調整パラメータk2およびk3は、慣性航法が開始されて所定時間経過した時点において計測されたデータに基づいて定めればよい。
【0158】
本実施形態におけるマハラノビス距離算出部41は、慣性航法が開始されてからの経過時間が長期化すればするほどに値が大きくなるように修正された修正速度差標準偏差(σ’2N,σ’2E,σ’2Az)および修正位置誤差標準偏差(σ’3N,σ’3E,σ’3Az)を用いてマハラノビス距離を算出してもよい。
【0159】
GPS速度ベクトル水平・垂直成分算出部27aは、GPS測位位置に基づき航空機401の速度を、水平(N,E)および垂直(Az)方向の3成分で示したGPS速度ベクトルVGPSとして算出する。
【0160】
速度ベクトル水平・垂直成分算出部17bは、独立計測手段である慣性航法装置109の出力に基づく航空機401の速度を、水平(N,E)および垂直(Az)方向の3成分で示した独立計測速度ベクトルVINSとして算出する。
【0161】
GPS位置ベクトル水平・垂直成分算出部45は、GPS測位位置に基づき航空機401の位置を、水平(N,E)および垂直(Az)方向の3成分で示したGPS位置ベクトルrGPSとして算出する。
【0162】
位置ベクトル水平・垂直成分算出部47は、独立計測手段である慣性航法装置109の出力に基づく航空機401の位置を、水平(N,E)および垂直(Az)方向の3成分で示した独立計測位置ベクトルrINSとして算出する。
【0163】
慣性航法経過時間計時部49は、例えば慣性航法装置109の出力に基づいて、慣性航法が開始されてからの経過時間を計測し、慣性航法経過時間TLPSとして出力する。
【0164】
速度差水平・垂直成分算出部35a(評価パラメータ算出部)は、GPS測位位置に基づく速度ベクトル、GPS速度ベクトルVGPS、と、独立計測手段による速度ベクトル、独立計測速度ベクトルVINS、との差を求め、速度差の水平(N,E)および垂直(Az)方向の3成分(x2N,x2E,x2Az)を算出する。
【0165】
位置誤差水平・垂直成分算出部23a(評価パラメータ算出部)は、GPS測位位置に基づく位置ベクトル、GPS位置ベクトルrGPS、と、独立計測手段による位置ベクトル、独立計測位置ベクトルrINS、との差を求め、位置誤差の水平(N,E)および垂直(Az)方向の3成分(x3N,x3E,x3Az)を算出する。
【0166】
位置誤差水平・垂直成分標準偏差修正部31bは、慣性航法経過時間TLPSに基づいて、位置誤差標準偏差(σ3N,σ3E,σ3Az)を修正する。具体的には、慣性航法経過時間TLPSが長期化すればするほど、位置誤差標準偏差(σ3N,σ3E,σ3Az)の各成分の値はより大きくなるように修正される。そして、位置誤差水平・垂直成分標準偏差修正部31bは、修正後の値を、修正位置誤差標準偏差(σ’3N,σ’3E,σ’3Az)として出力する。
【0167】
速度差水平・垂直成分標準偏差修正部37aは、慣性航法経過時間TLPSに基づいて、速度差標準偏差(σ2N,σ2E,σ2Az)を修正する。具体的には、慣性航法経過時間TLPSが長期化すればするほど、速度差標準偏差(σ2N,σ2E,σ2Az)の各成分の値はより大きくなるように修正される。そして、速度差水平・垂直成分標準偏差修正部37aは、修正後の値を、修正速度差標準偏差(σ’2N,σ’2E,σ’2Az)として出力する。
【0168】
そして、マハラノビス距離算出部41は、評価対象データの、正常標本データ集合に対するマハラノビス距離を算出する。
【0169】
ここでの評価対象データは、
GPS測位誤差推定部11が出力する、高度にかかる測位誤差を含めたGPS測位誤差(x1)、
速度差水平・垂直成分算出部35aが出力する、速度差の水平(N,E)および垂直(Az)方向の3成分(x2N,x2E,x2Az)、
位置誤差水平・垂直成分算出部23aが出力する、位置誤差の水平(N,E)および垂直(Az)方向の3成分(x3N,x3E,x3Az)、
をパラメータとして含むベクトル量である。
【0170】
また、マハラノビス距離算出部41は、正常標本データ集合の統計量として、高度にかかる測位誤差を含めたGPS測位誤差平均(m1)、速度差平均(m2N,m2E,m2Az)、位置誤差平均(m3N,m3E,m3Az)、高度にかかる測位誤差を含めたGPS測位誤差標準偏差(σ1)、速度差標準偏差(σ2N,σ2E,σ2Az)、位置誤差標準偏差(σ3N,σ3E,σ3Az)、を用いればよい。
【0171】
あるいは、マハラノビス距離算出部41は、速度差標準偏差(σ2N,σ2E,σ2Az)に代えて、
修正速度差標準偏差(σ’2N,σ’2E,σ’2Az)
=(k2N×TLPS+σ2N,
k2E×TLPS+σ2E,
k2Az×TLPS+σ2Az)を用いてもよく、あるいは、位置誤差標準偏差(σ3N,σ3E,σ3Az)に代えて、
修正位置誤差標準偏差(σ’3N,σ’3E,σ’3Az)
=(k3N×TLPS+σ3N,
k3E×TLPS+σ3E,
k3Az×TLPS+σ3Az)を用いてもよい。
【0172】
評価装置101bの信頼度評価部43は、第1実施形態による評価装置101の信頼度評価部43と同様に、マハラノビス距離算出部41が算出した、評価対象データの正常標本データ集合に対するマハラノビス距離に基づき、受信機の測位信頼度を評価する。
【0173】
なお、慣性航法装置109の代わりに、独立計測手段として、超短波全方向式無線標識施設(VHF Omnidirectional Range、VOR)、および、距離測定装置(Distance Measuring Equipment、DME)等を用いてもよい。
【0174】
慣性航法装置109にておいは、慣性航法が開始されてからの経過時間に従って計測誤差が大きくなることが知られるが、本実施形態では、そういった計測誤差が生じる状況で計測された評価対象データについては、速度差および位置誤差のマハラノビス距離における相対的な重みを軽くすることで、評価装置101bが誤って受信機103の測位信頼度を過小評価することを防止することができる。
【0175】
(第4実施形態)
第4実施形態においては、評価装置は、移動体として船舶に設置される。図11は、船舶501に設置された本実施形態による評価装置101cおよび評価装置101cに接続される機器の構成を示すブロック図である。以下の説明においては、第1、第2および/または第3の実施形態と同様の構成・動作・効果等については適宜説明を省略する。
【0176】
(ハードウェア構成)
評価装置101cは、衛星測位システム用受信機である受信機103と接続される。
【0177】
また、評価装置101cは、衛星測位システムに依らない独立計測手段である、対地速度計107b、ジャイロコンパス107g、および、船体の水平面に対する傾斜角θROLLをセンスする船体傾斜センサ131と接続される。対地速度計107bは、ドップラーソナー107dsと接続される。
【0178】
ドップラーソナー107dsは、水深数百メートル程度までの海域において、船体501の船首方向、船首に垂直な方向の対地速度VSONAR=(vsx,vsy)を計測することができる。
【0179】
ジャイロコンパス107gは、船首が向いている方向φ(例えば、船首の磁北に対する角度φ)をセンスする。
【0180】
(機能ブロックの構成)
図12は、評価装置101cが備える機能を示したブロック図である。
【0181】
評価装置101cにおけるGPS測位誤差推定部11、GPS緯度経度算出部13、GPS測位誤差標準偏差修正部21、マハラノビス距離算出部41、信頼度評価部43、精度劣化予測情報データ保持部51、については、第1実施形態における対応ブロックと同様の動作を行う。
【0182】
また、本実施形態においては、正常データ保持部55は、正常標本データ集合の統計量として、
GPS測位誤差平均(m1)、
水平(N,E)方向の2成分についての速度差平均(m2N,m2E)、
GPS測位誤差標準偏差(σ1)、
水平(N,E)方向の2成分についての速度差標準偏差(σ2N,σ2E)、を保持すればよい。さらに、正常データ保持部55は、速度差標準偏差(σ2N,σ2E,σ2Az)にかかる調整パラメータとして調整パラメータk2=(k2N,k2E)を備えてもよい。正常標本データは、船体が動揺しない状況において計測されればよい。また、調整パラメータk2は、船体が動揺する状況において計測されたデータに基づいて定めればよい。
【0183】
本実施形態におけるマハラノビス距離算出部41は、船体の動揺の程度(|θROLL|)が大きくなればなるほどに値が大きくなるように修正された修正速度差標準偏差(σ’2N,σ’2E)およびを用いてマハラノビス距離を算出してもよい。
【0184】
GPS速度水平二軸成分算出部27bは、GPS測位位置に基づき船舶501の速度を、水平(N,E)方向の2成分で示したGPS速度ベクトルVGPSとして算出する。
【0185】
速度水平二軸成分算出部17cは、独立測手段である対地速度計107bの出力(対地速度VSONAR=(vsx,vsy))および独立計測手段であるジャイロコンパス107gの出力(角度φ)にもとづき、独立計測手段による船舶501の速度を、水平(N,E)方向の2成分で示した独立計測速度ベクトルVDS(=(vsx×cosφ,vsy×sinφ))として算出する。
【0186】
船体動揺検出部49aは、船体傾斜センサ131の出力にもとづき、船体の水平面に対する傾斜角θROLLを出力する。傾斜角θROLLは、二方向(N,E)について求めてもよい。その場合、後述する修正部37bにおいては、各方向の傾斜角を対応する方向の標準偏差の修正に用いることができる。
【0187】
速度差水平成分算出部35bは、GPS測位位置に基づく速度ベクトル、GPS速度ベクトルVGPS、と、独立計測手段による速度ベクトル、独立計測速度ベクトルVDS、との差を求め、速度差の水平(N,E)方向の2成分(x2N,x2E)を算出する。
【0188】
速度差標準偏差修正部37bは、傾斜角θROLLに基づいて、速度差標準偏差(σ2N,σ2E)を修正する。具体的には、傾斜角θROLLが大きくなればなるほど、速度差標準偏差(σ2N,σ2E)の各成分の値はより大きくなるように修正される。そして、速度差標準偏差修正部37bは、修正後の値を、修正速度差標準偏差(σ’2N,σ’2E)として出力する。
【0189】
そして、マハラノビス距離算出部41は、評価対象データの、正常標本データ集合に対するマハラノビス距離を算出する。
【0190】
ここでの評価対象データは、
GPS測位誤差推定部11が出力する、GPS測位誤差(x1)、
速度差水平成分算出部35bが出力する、速度差の水平(N,E)方向の2成分(x2N,x2E)、
をパラメータとして含むベクトル量である。
【0191】
また、マハラノビス距離算出部41は、正常標本データ集合の統計量として、GPS測位誤差平均(m1)、速度差平均(m2N,m2E)、GPS測位誤差標準偏差(σ1)、速度差標準偏差(σ2N,σ2E)、を用いればよい。
【0192】
あるいは、マハラノビス距離算出部41は、速度差標準偏差(σ2N,σ2E)に代えて、
修正速度差標準偏差(σ’2N,σ’2E)
=(k2×|θROLL|+σ2N,
k2×|θROLL|+σ2E)を用いてもよい。
【0193】
評価装置101cの信頼度評価部43は、第1実施形態による評価装置101の信頼度評価部43と同様に、マハラノビス距離算出部41が算出した、評価対象データの正常標本データ集合に対するマハラノビス距離に基づき、受信機の測位信頼度を評価する。
【0194】
ドップラーソナー107dsにておいは、船体の動揺により計測誤差が生じることが知られるが、本実施形態では、そういった計測誤差が生じる状況で計測された評価対象データについては、速度差のマハラノビス距離における相対的な重みを軽くすることで、評価装置101cが誤って受信機103の測位信頼度を過小評価することを防止することができる。
【0195】
本発明において、「衛星測位システム」には、GPSが含まれ、それに限定されない。本願においてGPSを構成する衛星を、GPS衛星と称する。GPS衛星は、NAVSTER(NAVigation Satellite Timing And Ranging)衛星とも称される。
【0196】
本発明において、「移動体」は、地上を移動する移動体(鉄道車両、自動車、自動二輪、ロボット等)、空中を飛翔する移動体(航空機、ロケット、ミサイル等)、水上もしくは水中を移動する移動体(船舶、潜水艦、魚雷等)を含み、それらに限定されない。「移動体」は、所定の座標系(例えば、任意の局所慣性系)に対して位置座標を変化させることができるあらゆる物体を含む。
【0197】
本発明において、正常標本データ集合の標準偏差を修正する工程(図4のステップS109、S113、S115)は、必ずしも必須ではない。これら標準偏差修正工程が行われずとも、本発明は、移動体の状態を考慮した受信機測位誤差信頼度評価を行うことが可能である。
【産業上の利用可能性】
【0198】
本発明は、衛星測位システムを用いた測位の結果の信頼度を評価する装置として有用である。
【符号の説明】
【0199】
101 ・・・ 評価装置
103 ・・・ 受信機
103a・・・ アンテナ部
107ax・・ 車軸
201 ・・・ 鉄道車両
301 ・・・ 自動車
401 ・・・ 航空機
501 ・・・ 船舶
【特許請求の範囲】
【請求項1】
移動体に設置された衛星測位システムの受信機の測位信頼度を評価する測位信頼度評価装置であって、
前記受信機の出力に基づいて前記受信機の測位誤差を推定して、当該測位誤差を第1評価パラメータとして算出する第1評価パラメータ算出部と、
前記衛星測位システムに依拠しない計測手段の出力に基づいて第2評価パラメータを算出する第2評価パラメータ算出部と、
少なくとも前記第1評価パラメータおよび前記第2評価パラメータを含んだ評価対象データの、所定のデータ集合に対するマハラノビス距離を算出するマハラノビス距離算出部と、
前記マハラノビス距離に基づいて前記受信機の測位信頼度を評価する信頼度評価部と、を有する、測位信頼度評価装置。
【請求項2】
さらに、前記受信機の出力に基づいて前記受信機の測位位置を算出する衛星測位位置算出部を有し、
前記第2評価パラメータ算出部は、前記計測手段である前記移動体の速度を計測する速度センサの出力に基づいて算出された前記移動体の移動の速さと前記受信機の測位位置に基づいて算出された速さとの差を、前記第2評価パラメータとして算出する、請求項1に記載の測位信頼度評価装置。
【請求項3】
前記移動体は、鉄道車両であり、
前記測位信頼度評価装置が、さらに、前記鉄道車両の軌道が敷設された位置が示された軌道データを保持する軌道データ保持部と、
前記受信機の測位位置と、前記軌道データと、に基づいて、前記受信機の測位位置と軌道との乖離の大きさを第3評価パラメータとして算出する第3評価パラメータ算出部と、を有し、
前記マハラノビス距離算出部は、少なくとも前記第1評価パラメータ、前記第2評価パラメータ、および、前記第3評価パラメータを含んだ評価対象データの、所定のデータ集合に対するマハラノビス距離を算出する、請求項2に記載の測位信頼度評価装置。
【請求項4】
さらに、前記計測手段である前記移動体の向きの変化を計測するヨーレートセンサセンサの出力に基づいて算出された前記移動体の移動のヨーレートと前記受信機の測位位置に基づいて算出されたヨーレートとの差を、前記第4評価パラメータとして算出する第4評価パラメータ算出部を有し、
前記マハラノビス距離算出部は、少なくとも前記第1評価パラメータ、前記第2評価パラメータ、および、前記第4評価パラメータを含んだ評価対象データの、所定のデータ集合に対するマハラノビス距離を算出する、請求項2または3に記載の測位信頼度評価装置。
【請求項5】
さらに、前記受信機の受信状況の劣化度についての情報のデータを、対応する位置を特定するための情報と関連付けてなる精度劣化予測情報データを保持する予測情報データ保持部と、
前記所定のデータ集合を構成するデータのうち前記評価対象データの前記第1評価パラメータに対応するパラメータについての標準偏差である第1標準偏差を修正して、当該修正の結果を修正第1標準偏差として前記マハラノビス距離算出部へ通知する第1標準偏差修正部と、を有し、
前記第1標準偏差修正部は、前記第1標準偏差を、前記受信機の測位位置に対応する位置の精度劣化予測情報データが示す前記受信状況が劣化度の増大に応じて減少させるように修正して、修正第1標準偏差として前記マハラノビス距離算出部へ通知し、
前記マハラノビス距離算出部は、前記第1標準偏差に代えて前記修正第1標準偏差を用いてマハラノビス距離を算出する、請求項2に記載の測位信頼度評価装置。
【請求項6】
前記所定のデータ集合を構成するデータのうち前記評価対象データの前記第2評価パラメータに対応するパラメータについての標準偏差である第2標準偏差を修正して、当該修正の結果を修正第2標準偏差として前記マハラノビス距離算出部へ通知する第2標準偏差修正部、を有し、
前記第2標準偏差修正部は、前記第2標準偏差を、前記計測手段である前記移動体の速度を計測する速度センサの出力に基づいて算出された前記移動体の移動の加速度の絶対値の増大に応じて増加させるように修正して、修正第2標準偏差として前記マハラノビス距離算出部へ通知し、
前記マハラノビス距離算出部は、前記第2標準偏差に代えて前記修正第2標準偏差を用いてマハラノビス距離を算出する、請求項2に記載の測位信頼度評価装置。
【請求項7】
前記所定のデータ集合を構成するデータのうち前記評価対象データの前記第3評価パラメータに対応するデータの標準偏差である第3標準偏差を修正して、当該修正の結果を修正第3標準偏差として前記マハラノビス距離算出部へ通知する第3標準偏差修正部、を有し、
前記第3標準偏差修正部は、前記第3標準偏差を、前記軌道データにもとづいて得られる前記受信機の測位位置に最近接する軌道の曲率の大きさの増大に応じて増加させるように修正して、修正第3標準偏差として前記マハラノビス距離算出部へ通知し、
前記マハラノビス距離算出部は、前記第3標準偏差に代えて前記修正第3標準偏差を用いてマハラノビス距離を算出する、請求項3に記載の測位信頼度評価装置。
【請求項8】
前記移動体は、自動車であり、
前記測位信頼度評価装置が、さらに、道路の位置が示された道路地図データを保持する道路地図データ保持部と、
前記受信機の測位位置と、前記道路地図データと、に基づいて、マップマッチングを行い、当該マップマッチングにかかる移動距離を算出して第3評価パラメータとして算出する第3評価パラメータ算出部と、を有し、
前記マハラノビス距離算出部は、少なくとも前記第1評価パラメータ、前記第2評価パラメータ、および、前記第3評価パラメータを含んだ評価対象データの、所定のデータ集合に対するマハラノビス距離を算出する、請求項2に記載の測位信頼度評価装置。
【請求項9】
前記所定のデータ集合を構成するデータのうち前記評価対象データの前記第3評価パラメータに対応するデータの標準偏差である第3標準偏差を修正して、当該修正の結果を修正第3標準偏差として前記マハラノビス距離算出部へ通知する第3標準偏差修正部、を有し、
前記第3標準偏差修正部は、前記第3標準偏差を、前記マップマッチング距離の増大に応じて増加させるように修正して、修正第3標準偏差として前記マハラノビス距離算出部へ通知し、
前記マハラノビス距離算出部は、前記第3標準偏差に代えて前記修正第3標準偏差を用いてマハラノビス距離を算出する、請求項8に記載の測位信頼度評価装置。
【請求項10】
前記移動体は、航空機であり、
前記測位信頼度評価装置は、さらに、前記所定のデータ集合を構成するデータのうち前記評価対象データの前記第2評価パラメータに対応するパラメータについての標準偏差である第2標準偏差を修正して、当該修正の結果を修正第2標準偏差として前記マハラノビス距離算出部へ通知する第2標準偏差修正部と、
前記計測手段としての前記速度センサを構成する慣性航法装置による慣性航法が開始されてからの経過時間を計測する経過時間計時部と、を有し、
前記第2標準偏差修正部は、前記第2標準偏差を、前記経過時間の増大に応じて増加させるように修正して、修正第2標準偏差として前記マハラノビス距離算出部へ通知し、
前記マハラノビス距離算出部は、前記第2標準偏差に代えて前記修正第2標準偏差を用いてマハラノビス距離を算出する、請求項2に記載の測位信頼度評価装置。
【請求項11】
さらに、前記慣性航法装置による慣性航法に基づいて前記航空機の位置である慣性航法位置を算出する慣性航法位置算出部と、
前記受信機の測位位置と前記慣性航法位置との間の距離の大きさを第3評価パラメータとして算出する第3評価パラメータ算出部と、を有し、
前記マハラノビス距離算出部は、少なくとも前記第1評価パラメータ、前記第2評価パラメータ、および、前記第3評価パラメータを含んだ評価対象データの、所定のデータ集合に対するマハラノビス距離を算出する、請求項10に記載の測位信頼度評価装置。
【請求項12】
前記所定のデータ集合を構成するデータのうち前記評価対象データの前記第3評価パラメータに対応するデータの標準偏差である第3標準偏差を修正して、当該修正の結果を修正第3標準偏差として前記マハラノビス距離算出部へ通知する第3標準偏差修正部、を有し、
前記第3標準偏差修正部は、前記第3標準偏差を、前記経過時間の増大に応じて増加させるように修正して、修正第3標準偏差として前記マハラノビス距離算出部へ通知し、
前記マハラノビス距離算出部は、前記第3標準偏差に代えて前記修正第3標準偏差を用いてマハラノビス距離を算出する、請求項11に記載の測位信頼度評価装置。
【請求項13】
前記移動体は、船舶であり、
前記測位信頼度評価装置は、さらに、前記所定のデータ集合を構成するデータのうち前記評価対象データの前記第2評価パラメータに対応するパラメータについての標準偏差である第2標準偏差を修正して、当該修正の結果を修正第2標準偏差として前記マハラノビス距離算出部へ通知する第2標準偏差修正部と、
前記計測手段である船体傾斜センサの出力に基づいて算出された前記移動体の水平面に対する傾斜角を算出する船体動揺検出部と、を有し、
前記第2標準偏差修正部は、前記第2標準偏差を、前記傾斜角の増大に応じて増加させるように修正して、修正第2標準偏差として前記マハラノビス距離算出部へ通知し、
前記マハラノビス距離算出部は、前記第2標準偏差に代えて前記修正第2標準偏差を用いてマハラノビス距離を算出する、請求項2に記載の測位信頼度評価装置。
【請求項14】
移動体に設置された衛星測位システムの受信機の測位信頼度を評価する測位信頼度評価装置による測位信頼度評価方法であって、
前記測位信頼度評価装置が、前記受信機の出力に基づいて前記受信機の測位誤差を推定して、当該測位誤差を第1評価パラメータとして算出する第1評価パラメータ算出ステップと、
前記測位信頼度評価装置が、前記衛星測位システムに依拠しない計測手段の出力に基づいて第2評価パラメータを算出する第2評価パラメータ算出ステップと、
前記測位信頼度評価装置が、少なくとも第1評価パラメータとしての前記受信機の測位誤差および前記第2評価パラメータを含んだ評価対象データの、所定のデータ集合に対するマハラノビス距離を算出するマハラノビス距離算出ステップと、
前記測位信頼度評価装置が、前記マハラノビス距離に基づいて前記受信機の測位信頼度を評価する信頼度評価ステップと、を有する、測位信頼度評価方法。
【請求項15】
移動体に設置された衛星測位システムの受信機の測位信頼度を評価する測位信頼度評価装置のコンピュータが実行可能な測位信頼度評価プログラムであって、前記測位信頼度評価プログラムは、前記コンピュータを、
前記受信機の出力に基づいて前記受信機の測位誤差を推定して、当該測位誤差を第1評価パラメータとして算出する第1評価パラメータ算出部と、
前記衛星測位システムに依拠しない計測手段の出力に基づいて第2評価パラメータを算出する第2評価パラメータ算出部と、
少なくとも第1評価パラメータとしての前記受信機の測位誤差および前記第2評価パラメータを含んだ評価対象データの、所定のデータ集合に対するマハラノビス距離を算出するマハラノビス距離算出部と、
前記マハラノビス距離に基づいて前記受信機の測位信頼度を評価する信頼度評価部として機能させることを特徴とする、測位信頼度評価プログラム。
【請求項1】
移動体に設置された衛星測位システムの受信機の測位信頼度を評価する測位信頼度評価装置であって、
前記受信機の出力に基づいて前記受信機の測位誤差を推定して、当該測位誤差を第1評価パラメータとして算出する第1評価パラメータ算出部と、
前記衛星測位システムに依拠しない計測手段の出力に基づいて第2評価パラメータを算出する第2評価パラメータ算出部と、
少なくとも前記第1評価パラメータおよび前記第2評価パラメータを含んだ評価対象データの、所定のデータ集合に対するマハラノビス距離を算出するマハラノビス距離算出部と、
前記マハラノビス距離に基づいて前記受信機の測位信頼度を評価する信頼度評価部と、を有する、測位信頼度評価装置。
【請求項2】
さらに、前記受信機の出力に基づいて前記受信機の測位位置を算出する衛星測位位置算出部を有し、
前記第2評価パラメータ算出部は、前記計測手段である前記移動体の速度を計測する速度センサの出力に基づいて算出された前記移動体の移動の速さと前記受信機の測位位置に基づいて算出された速さとの差を、前記第2評価パラメータとして算出する、請求項1に記載の測位信頼度評価装置。
【請求項3】
前記移動体は、鉄道車両であり、
前記測位信頼度評価装置が、さらに、前記鉄道車両の軌道が敷設された位置が示された軌道データを保持する軌道データ保持部と、
前記受信機の測位位置と、前記軌道データと、に基づいて、前記受信機の測位位置と軌道との乖離の大きさを第3評価パラメータとして算出する第3評価パラメータ算出部と、を有し、
前記マハラノビス距離算出部は、少なくとも前記第1評価パラメータ、前記第2評価パラメータ、および、前記第3評価パラメータを含んだ評価対象データの、所定のデータ集合に対するマハラノビス距離を算出する、請求項2に記載の測位信頼度評価装置。
【請求項4】
さらに、前記計測手段である前記移動体の向きの変化を計測するヨーレートセンサセンサの出力に基づいて算出された前記移動体の移動のヨーレートと前記受信機の測位位置に基づいて算出されたヨーレートとの差を、前記第4評価パラメータとして算出する第4評価パラメータ算出部を有し、
前記マハラノビス距離算出部は、少なくとも前記第1評価パラメータ、前記第2評価パラメータ、および、前記第4評価パラメータを含んだ評価対象データの、所定のデータ集合に対するマハラノビス距離を算出する、請求項2または3に記載の測位信頼度評価装置。
【請求項5】
さらに、前記受信機の受信状況の劣化度についての情報のデータを、対応する位置を特定するための情報と関連付けてなる精度劣化予測情報データを保持する予測情報データ保持部と、
前記所定のデータ集合を構成するデータのうち前記評価対象データの前記第1評価パラメータに対応するパラメータについての標準偏差である第1標準偏差を修正して、当該修正の結果を修正第1標準偏差として前記マハラノビス距離算出部へ通知する第1標準偏差修正部と、を有し、
前記第1標準偏差修正部は、前記第1標準偏差を、前記受信機の測位位置に対応する位置の精度劣化予測情報データが示す前記受信状況が劣化度の増大に応じて減少させるように修正して、修正第1標準偏差として前記マハラノビス距離算出部へ通知し、
前記マハラノビス距離算出部は、前記第1標準偏差に代えて前記修正第1標準偏差を用いてマハラノビス距離を算出する、請求項2に記載の測位信頼度評価装置。
【請求項6】
前記所定のデータ集合を構成するデータのうち前記評価対象データの前記第2評価パラメータに対応するパラメータについての標準偏差である第2標準偏差を修正して、当該修正の結果を修正第2標準偏差として前記マハラノビス距離算出部へ通知する第2標準偏差修正部、を有し、
前記第2標準偏差修正部は、前記第2標準偏差を、前記計測手段である前記移動体の速度を計測する速度センサの出力に基づいて算出された前記移動体の移動の加速度の絶対値の増大に応じて増加させるように修正して、修正第2標準偏差として前記マハラノビス距離算出部へ通知し、
前記マハラノビス距離算出部は、前記第2標準偏差に代えて前記修正第2標準偏差を用いてマハラノビス距離を算出する、請求項2に記載の測位信頼度評価装置。
【請求項7】
前記所定のデータ集合を構成するデータのうち前記評価対象データの前記第3評価パラメータに対応するデータの標準偏差である第3標準偏差を修正して、当該修正の結果を修正第3標準偏差として前記マハラノビス距離算出部へ通知する第3標準偏差修正部、を有し、
前記第3標準偏差修正部は、前記第3標準偏差を、前記軌道データにもとづいて得られる前記受信機の測位位置に最近接する軌道の曲率の大きさの増大に応じて増加させるように修正して、修正第3標準偏差として前記マハラノビス距離算出部へ通知し、
前記マハラノビス距離算出部は、前記第3標準偏差に代えて前記修正第3標準偏差を用いてマハラノビス距離を算出する、請求項3に記載の測位信頼度評価装置。
【請求項8】
前記移動体は、自動車であり、
前記測位信頼度評価装置が、さらに、道路の位置が示された道路地図データを保持する道路地図データ保持部と、
前記受信機の測位位置と、前記道路地図データと、に基づいて、マップマッチングを行い、当該マップマッチングにかかる移動距離を算出して第3評価パラメータとして算出する第3評価パラメータ算出部と、を有し、
前記マハラノビス距離算出部は、少なくとも前記第1評価パラメータ、前記第2評価パラメータ、および、前記第3評価パラメータを含んだ評価対象データの、所定のデータ集合に対するマハラノビス距離を算出する、請求項2に記載の測位信頼度評価装置。
【請求項9】
前記所定のデータ集合を構成するデータのうち前記評価対象データの前記第3評価パラメータに対応するデータの標準偏差である第3標準偏差を修正して、当該修正の結果を修正第3標準偏差として前記マハラノビス距離算出部へ通知する第3標準偏差修正部、を有し、
前記第3標準偏差修正部は、前記第3標準偏差を、前記マップマッチング距離の増大に応じて増加させるように修正して、修正第3標準偏差として前記マハラノビス距離算出部へ通知し、
前記マハラノビス距離算出部は、前記第3標準偏差に代えて前記修正第3標準偏差を用いてマハラノビス距離を算出する、請求項8に記載の測位信頼度評価装置。
【請求項10】
前記移動体は、航空機であり、
前記測位信頼度評価装置は、さらに、前記所定のデータ集合を構成するデータのうち前記評価対象データの前記第2評価パラメータに対応するパラメータについての標準偏差である第2標準偏差を修正して、当該修正の結果を修正第2標準偏差として前記マハラノビス距離算出部へ通知する第2標準偏差修正部と、
前記計測手段としての前記速度センサを構成する慣性航法装置による慣性航法が開始されてからの経過時間を計測する経過時間計時部と、を有し、
前記第2標準偏差修正部は、前記第2標準偏差を、前記経過時間の増大に応じて増加させるように修正して、修正第2標準偏差として前記マハラノビス距離算出部へ通知し、
前記マハラノビス距離算出部は、前記第2標準偏差に代えて前記修正第2標準偏差を用いてマハラノビス距離を算出する、請求項2に記載の測位信頼度評価装置。
【請求項11】
さらに、前記慣性航法装置による慣性航法に基づいて前記航空機の位置である慣性航法位置を算出する慣性航法位置算出部と、
前記受信機の測位位置と前記慣性航法位置との間の距離の大きさを第3評価パラメータとして算出する第3評価パラメータ算出部と、を有し、
前記マハラノビス距離算出部は、少なくとも前記第1評価パラメータ、前記第2評価パラメータ、および、前記第3評価パラメータを含んだ評価対象データの、所定のデータ集合に対するマハラノビス距離を算出する、請求項10に記載の測位信頼度評価装置。
【請求項12】
前記所定のデータ集合を構成するデータのうち前記評価対象データの前記第3評価パラメータに対応するデータの標準偏差である第3標準偏差を修正して、当該修正の結果を修正第3標準偏差として前記マハラノビス距離算出部へ通知する第3標準偏差修正部、を有し、
前記第3標準偏差修正部は、前記第3標準偏差を、前記経過時間の増大に応じて増加させるように修正して、修正第3標準偏差として前記マハラノビス距離算出部へ通知し、
前記マハラノビス距離算出部は、前記第3標準偏差に代えて前記修正第3標準偏差を用いてマハラノビス距離を算出する、請求項11に記載の測位信頼度評価装置。
【請求項13】
前記移動体は、船舶であり、
前記測位信頼度評価装置は、さらに、前記所定のデータ集合を構成するデータのうち前記評価対象データの前記第2評価パラメータに対応するパラメータについての標準偏差である第2標準偏差を修正して、当該修正の結果を修正第2標準偏差として前記マハラノビス距離算出部へ通知する第2標準偏差修正部と、
前記計測手段である船体傾斜センサの出力に基づいて算出された前記移動体の水平面に対する傾斜角を算出する船体動揺検出部と、を有し、
前記第2標準偏差修正部は、前記第2標準偏差を、前記傾斜角の増大に応じて増加させるように修正して、修正第2標準偏差として前記マハラノビス距離算出部へ通知し、
前記マハラノビス距離算出部は、前記第2標準偏差に代えて前記修正第2標準偏差を用いてマハラノビス距離を算出する、請求項2に記載の測位信頼度評価装置。
【請求項14】
移動体に設置された衛星測位システムの受信機の測位信頼度を評価する測位信頼度評価装置による測位信頼度評価方法であって、
前記測位信頼度評価装置が、前記受信機の出力に基づいて前記受信機の測位誤差を推定して、当該測位誤差を第1評価パラメータとして算出する第1評価パラメータ算出ステップと、
前記測位信頼度評価装置が、前記衛星測位システムに依拠しない計測手段の出力に基づいて第2評価パラメータを算出する第2評価パラメータ算出ステップと、
前記測位信頼度評価装置が、少なくとも第1評価パラメータとしての前記受信機の測位誤差および前記第2評価パラメータを含んだ評価対象データの、所定のデータ集合に対するマハラノビス距離を算出するマハラノビス距離算出ステップと、
前記測位信頼度評価装置が、前記マハラノビス距離に基づいて前記受信機の測位信頼度を評価する信頼度評価ステップと、を有する、測位信頼度評価方法。
【請求項15】
移動体に設置された衛星測位システムの受信機の測位信頼度を評価する測位信頼度評価装置のコンピュータが実行可能な測位信頼度評価プログラムであって、前記測位信頼度評価プログラムは、前記コンピュータを、
前記受信機の出力に基づいて前記受信機の測位誤差を推定して、当該測位誤差を第1評価パラメータとして算出する第1評価パラメータ算出部と、
前記衛星測位システムに依拠しない計測手段の出力に基づいて第2評価パラメータを算出する第2評価パラメータ算出部と、
少なくとも第1評価パラメータとしての前記受信機の測位誤差および前記第2評価パラメータを含んだ評価対象データの、所定のデータ集合に対するマハラノビス距離を算出するマハラノビス距離算出部と、
前記マハラノビス距離に基づいて前記受信機の測位信頼度を評価する信頼度評価部として機能させることを特徴とする、測位信頼度評価プログラム。
【図1】

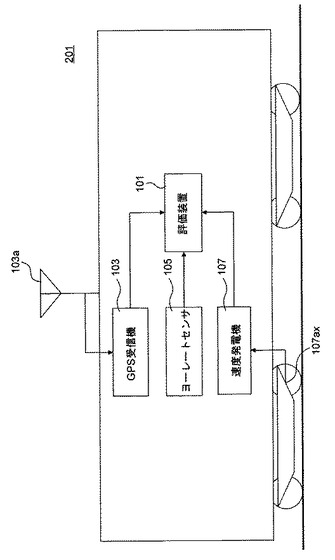
【図2】
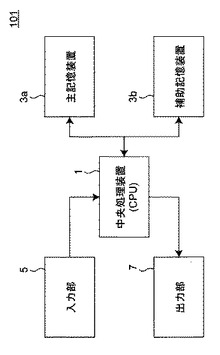
【図3】
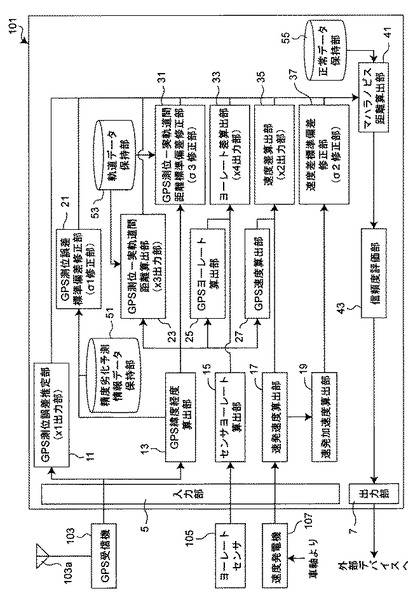
【図4】
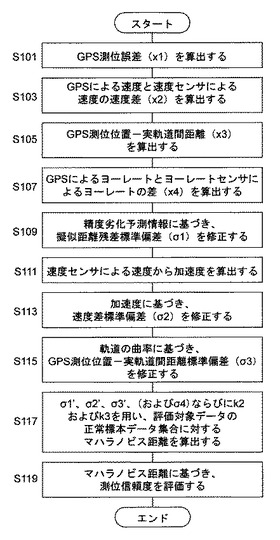
【図5】
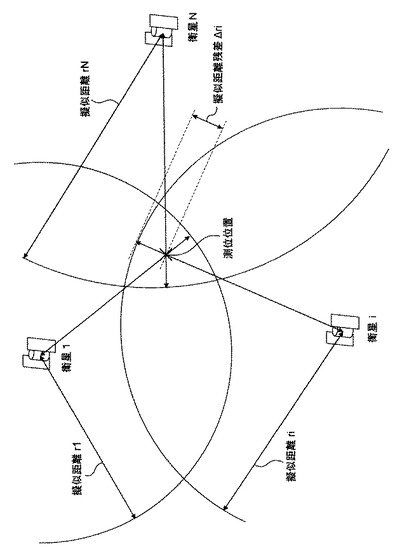
【図6】
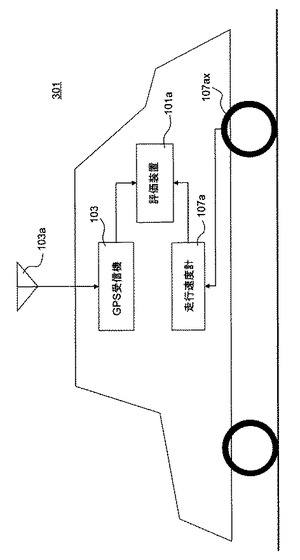
【図7】
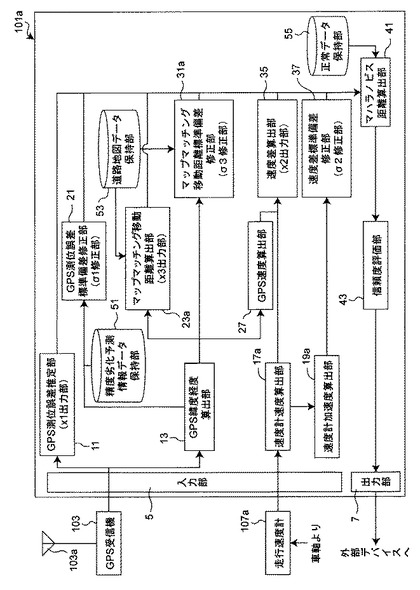
【図8】
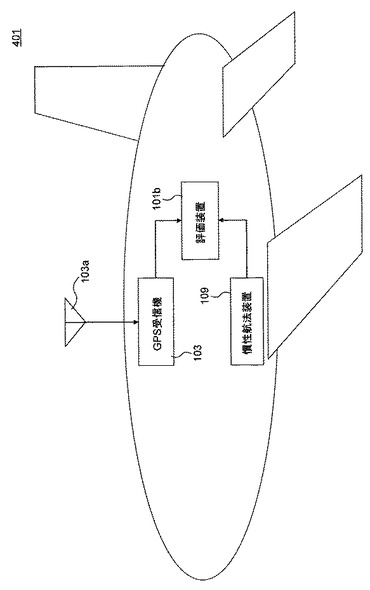
【図9】
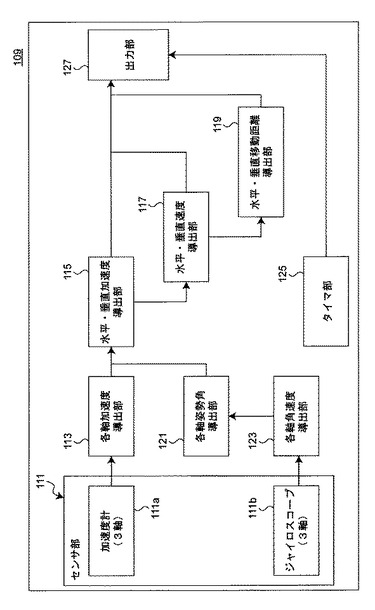
【図10】
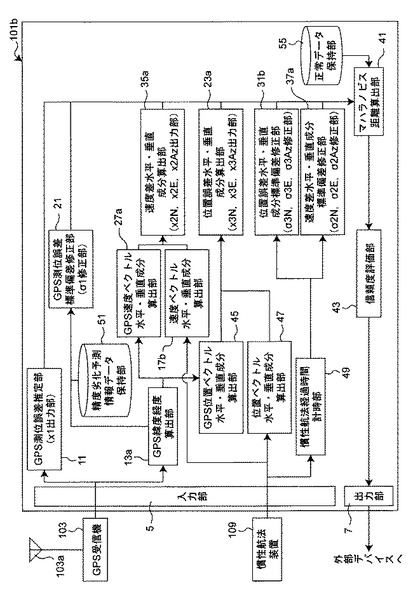
【図11】
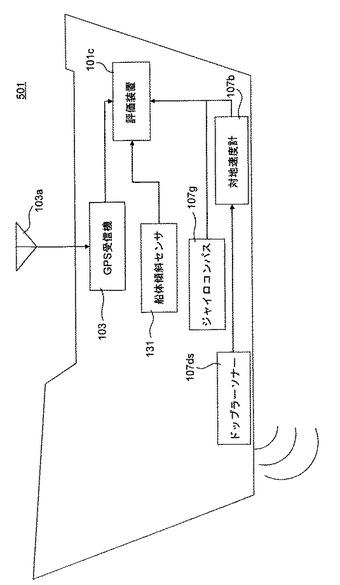
【図12】
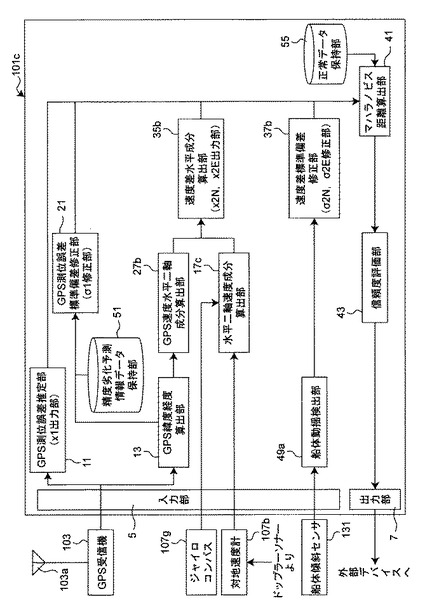
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【公開番号】特開2011−137708(P2011−137708A)
【公開日】平成23年7月14日(2011.7.14)
【国際特許分類】
【出願番号】特願2009−297622(P2009−297622)
【出願日】平成21年12月28日(2009.12.28)
【出願人】(000000974)川崎重工業株式会社 (1,710)
【Fターム(参考)】
【公開日】平成23年7月14日(2011.7.14)
【国際特許分類】
【出願日】平成21年12月28日(2009.12.28)
【出願人】(000000974)川崎重工業株式会社 (1,710)
【Fターム(参考)】
[ Back to top ]