
衛星測位装置

【課題】より精度良く現在位置を算出する「衛星測位装置」を提供する。
【解決手段】各時点tにおいて、直前の時点で算出した現在位置P(t-1)と衛星測位部14で算出された時刻tの衛星測位位置Ps(t)に基づく時刻tの移動ベクトルVs(t)と、速度ベクトル算出部15において算出された時刻tの速度ベクトルV(t)に基づく時刻tの時刻t-1に対する移動量と移動方向を表す移動ベクトルVd(t)とを求め、移動ベクトルVs(t)と移動ベクトルVd(t)の差分ベクトルの大きさがしきい値Th以上であるかどうかを調べる。そして、差分ベクトルの大きさがしきい値Th以上であれば、衛星測位位置Ps(t)に誤りが発生しているものと見なして、衛星測位位置Ps(t)に代えて、直前の時点で算出した現在位置P(t-1)に時刻tの速度ベクトル基準移動ベクトルVd(t)を加えた位置を時刻tの現在位置P(t)として算出する。
【解決手段】各時点tにおいて、直前の時点で算出した現在位置P(t-1)と衛星測位部14で算出された時刻tの衛星測位位置Ps(t)に基づく時刻tの移動ベクトルVs(t)と、速度ベクトル算出部15において算出された時刻tの速度ベクトルV(t)に基づく時刻tの時刻t-1に対する移動量と移動方向を表す移動ベクトルVd(t)とを求め、移動ベクトルVs(t)と移動ベクトルVd(t)の差分ベクトルの大きさがしきい値Th以上であるかどうかを調べる。そして、差分ベクトルの大きさがしきい値Th以上であれば、衛星測位位置Ps(t)に誤りが発生しているものと見なして、衛星測位位置Ps(t)に代えて、直前の時点で算出した現在位置P(t-1)に時刻tの速度ベクトル基準移動ベクトルVd(t)を加えた位置を時刻tの現在位置P(t)として算出する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、衛星からの受信信号に基づいて現在位置を測定する衛星測位装置に関するものである。
【背景技術】
【0002】
複数の衛星と自動車等の移動体と共に移動する衛星測位装置とより構成される衛星航法システムとしては、GPS(Global Positioning System)が広く利用されている。
また、このようなGPSにおける衛星測位装置であるGPS受信機における測位の技術としては、コード測位方式や搬送波測位方式と呼ばれる、衛星からの受信信号の伝搬遅延より求まる衛星までの距離に基づいて位置を測定する衛星測位に加えて、衛星からの受信信号のドップラシフト量から求まる速度ベクトルより算出した移動ベクトルを利用して現在位置の測定を行う技術が知られている。
【0003】
すなわち、たとえば、衛星測位で測定した位置が所定のしきい値より大きく変化した場合に、衛星測位で測定した位置に誤差が発生しているものと見なして、その後の所定期間、前回算出した現在位置に、ドップラシフト量から求まる速度ベクトルより算出した移動ベクトルを加えた位置を、今回の現在位置として算出する技術や(たとえば、特許文献1)、今回衛星測位で算出した位置の前回算出した現在位置に対する移動ベクトルを、衛星からの受信信号のドップラシフト量から求まる速度ベクトルより算出した移動ベクトルを用いて平滑化し、平滑化した移動ベクトルを、前回算出した現在位置に加えた位置を、今回の現在位置として算出する技術(たとえば、特許文献2)が知られている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2005-300167号公報
【特許文献2】特開2009-025045号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
前述した特許文献1記載の技術によれば、衛星測位で測定した位置が所定のしきい値より大きく変化した場合に、衛星測位で測定した位置に誤差が発生しているものと見なして、その後、所定期間、衛星からの受信信号のドップラシフト量から求まる速度ベクトルより算出した移動ベクトルを用いた現在位置の算出を行うが、衛星測位で測定した位置が所定のしきい値より大きく変化したか否かのみによっては、様々な要因によって発生する衛星測位の誤差の全てについて、精度良く、当該誤差の発生を検出することはできない。すなわち、たとえば、衛星測位の誤差によって生じた変化と、真の位置の変化との大きさが等しい場合に、衛星測位で測定した位置の変化の大きさのみによっては、これを弁別することはできない。
【0006】
また、当該特許文献1記載の技術によれば、衛星測位で測定した位置に誤差が発生しているものと見なした場合に、無条件に、その後、所定期間、衛星からの受信信号のドップラシフト量から求まる速度ベクトルより算出した移動ベクトルを用いた現在位置の算出を行うため、当該所定期間中に、衛星測位の誤差が解消したとしても、当該誤差の無い衛星測位によって測定した位置を現在位置として算出することができない。
【0007】
よって、当該特許文献1記載の技術によれば、必ずしも常に精度良く現在位置を算出することができない。
また、前述した特許文献2記載の技術では、算出される現在位置の軌跡を平滑化することはできるが、衛星測位で測定した位置に生じた誤差に起因する、現在位置の算出誤差の低減を充分に図ることはできない。
そこで、本発明は、衛星測位に加えて衛星からの受信信号のドップラシフト量から求まる速度ベクトルより算出した移動ベクトルを利用して現在位置を算出する衛星測位装置において、より精度良く現在位置を算出することを課題とする。
【課題を解決するための手段】
【0008】
前記課題達成のために、本発明は、衛星から受信した信号に基づいて現在位置の測位を行う衛星測位装置に、衛星から受信した信号を用いた衛星測位によって、現時点の位置を衛星測位位置として算出する衛星測位部と、衛星から受信した信号に発生しているドップラシフト量に基づいて、現時点の速度ベクトルを算出する速度ベクトル算出部と、繰り返し現在位置を算出する現在位置算出部とを備え、前記現在位置算出部において、前記現在位置の算出の各回において、前記衛星測位位置と前記速度ベクトルとを取得し、今回取得した衛星測位位置の前回算出した前記現在位置からの移動方向と移動量を表す移動ベクトルである第1移動ベクトルと、今回取得した前記速度ベクトルより求まる前回現在位置を算出した時点からの移動方向と移動量を表す移動ベクトルである第2移動ベクトルとを算出し、当該第1ベクトルと当該第2ベクトルとの差分ベクトルの大きさが所定の大きさより小さい場合に、今回取得した衛星測位位置を今回の現在位置として算出し、前記差分ベクトルの大きさが前記所定の大きさ以上である場合に、前回算出した前記現在位置に今回算出した前記第2移動ベクトルを加えた位置を、今回の現在位置として算出するようにしたものである。
【0009】
ここで、衛星測位位置と速度ベクトルは、相互に異なる原理によって算出されるものであり、衛星測位位置に比べ速度ベクトルの精度の劣化の頻度や程度は小さい。
よって、以上の衛星測位装置によれば、当該第1ベクトルと当該第2ベクトルとの差分ベクトルの大きさによって、衛星測位位置に真に誤差が発生しているかどうかを精度良く検出し、衛星測位位置に真に誤差が発生している場合にのみ、速度ベクトルを利用して次善的に求めた現在位置を現在位置として出力し、他の場合には、誤差が発生していない正しい衛星測位位置を現在位置として出力することができる。
【0010】
よって、全体として、より精度良く現在位置を算出することができるようになる。
ここで、このような衛星測位装置は、前記現在位置算出部において、前記差分ベクトルの大きさが前記所定の大きさ以上であっても、前回までの所定数以上の連続した各回において、当該回の前回に算出した前記現在位置に当該回において算出した前記第2移動ベクトルを加えた位置を、当該回の現在位置として算出している場合には、前回算出した前記現在位置に今回算出した前記第2移動ベクトルを加えた位置を、今回の現在位置として算出せずに、今回取得した衛星測位位置を今回の現在位置として算出するように構成してもよい。また、このような衛星測位装置に、前記衛星測位部における衛星測位の衛星測位の誤差要因の大きさを算定する衛星測位品質評価手段を設け、前記現在位置算出部において、前記差分ベクトルの大きさが前記所定の大きさ以上であっても、前記衛星測位品質評価手段が算定する誤差要因の大きさが所定レベルよりも小さい場合には、前回算出した前記現在位置に今回算出した前記第2移動ベクトルを加えた位置を、今回の現在位置として算出せずに、今回取得した衛星測位位置を今回の現在位置として算出するように構成してもよい。
【0011】
これらのようにすることにより、前回算出した前記現在位置に、速度ベクトルに基づいて今回算出した前記第2移動ベクトルを加えた位置を現在位置とすることを繰り返すことによる、速度ベクトルの誤差による現在位置への誤差の蓄積を抑制することができる。
【発明の効果】
【0012】
以上のように、本発明によれば、衛星測位に加えて衛星からの受信信号のドップラシフト量から求まる速度ベクトルより算出した移動ベクトルを利用して現在位置を算出する衛星測位装置において、より精度良く現在位置を算出することができる。
【図面の簡単な説明】
【0013】
【図1】本発明の実施形態に係る車載システムの構成を示すブロック図である。
【図2】本発明の実施形態に係る位置算出処理を示すフローチャートである。
【図3】本発明の実施形態に係る位置算出処理の処理例を示す図である。
【発明を実施するための形態】
【0014】
以下、本発明の実施形態について説明する。
図1に、本実施形態に係る車載システムの構成を示す。
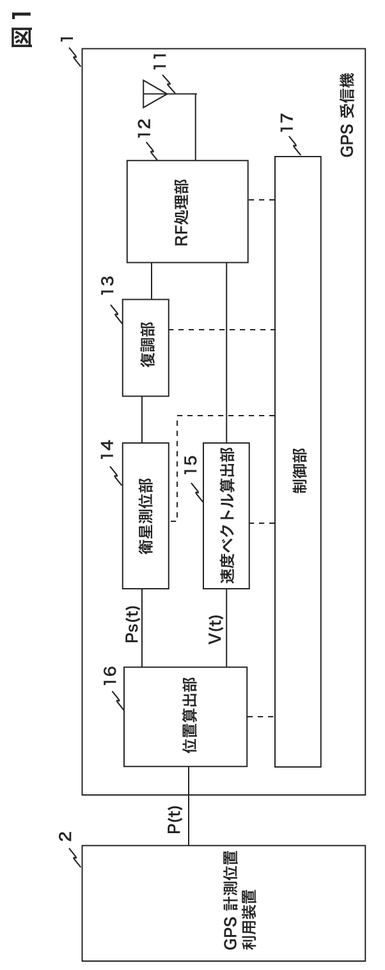
本車載システムは、自動車に搭載されるシステムであり、図示するように、各時点において現在位置P(t)を算出し出力するGPS受信機1と、カーナビゲーション装置などの、GPS受信機1が出力する現在位置P(t)を利用した処理を行うGPS計測位置利用装置2とを備えている。
【0015】
そして、GPS受信機1は、アンテナ11、RF処理部12、復調部13、衛星測位部14、速度ベクトル算出部15、位置算出部16、制御部17とを有する。
RF処理部12は、アンテナ11による受信信号の増幅や中間周波数信号への変換などを行う。復調部13は、RF処理部12が処理した信号から、各衛星が送信した送信信号を抽出し、そのベースバンド信号を復調する。
制御部17は、各衛星の送信電波の受信電界強度や、各衛星の送信電波のS/Nや、各衛星の仰角や、位置の決定精度を表すDOP/GDOP値や、利用者等価測距誤差UEREなどの衛星測位の誤差要因の大きさを表す各量を算出して評価し、より少ない誤差で衛星測位を行える複数の衛星を選択する。
【0016】
衛星測位部14は、制御部17が選択した衛星からのベースバンド信号を用い、コード測位方式によって、衛星からの受信信号の伝搬遅延より求まる衛星までの距離に基づいて位置を算出する衛星測位を行い、衛星測位位置Ps(t)を出力する。
速度ベクトル算出部15は、制御部17が選択した衛星が送信した送信信号のドップラシフト量より速度ベクトルV(t)を算出し出力する。
そして、位置算出部16は、以下に示す位置算出処理を行って現在位置P(t)を算出する。
図2に、この位置算出処理の手順を示す。
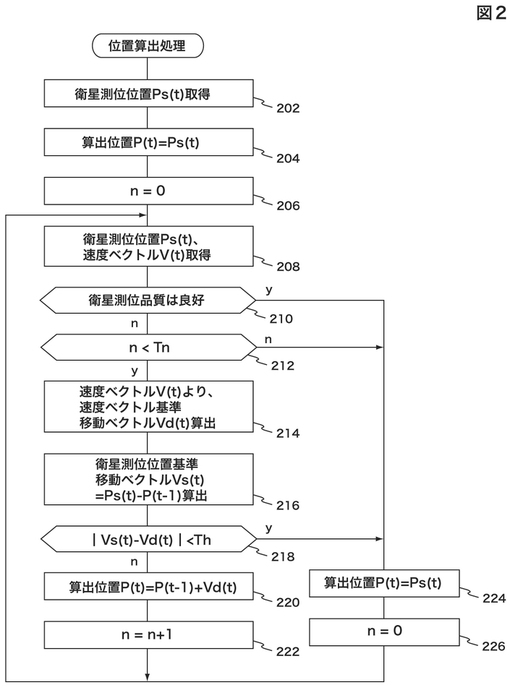
図示するように、この位置算出処理では、まず、ステップ202-206の初期処理を行う。
初期処理では、衛星測位部14から現在の衛星測位位置Ps(t)を取得し(ステップ202)、取得した衛星測位位置Ps(t)を現在位置P(t)として出力し(ステップ204)、パラメータnを0に設定する(ステップ206)。
そして、初期処理を終了したならば、以降は以下の処理を行う。
すなわち、まず、衛星測位部14から現在の衛星測位位置Ps(t)を取得すると共に、速度ベクトル算出部15から速度ベクトルV(t)を取得する(ステップ208)。
そして、衛星測位品質が所定レベル以上良好であるかどうかと(ステップ210)、パラメータnが予め定めた数Tn未満であるか(ステップ212)どうかを調べる。
ここで、衛星測位品質が所定レベル以上良好であるかどうかは、制御部17が選択している各衛星または各衛星の組み合わせについて、制御部17が算出している、各衛星の送信電波の受信電界強度やS/Nや、位置の決定精度を表すDOP/GDOP値や、利用者等価測距誤差UEREなどの衛星測位の誤差要因の大きさを表す各量に基づいて判定する。
【0017】
そして、衛星測位品質が所定レベル以上良好であるか(ステップ210)、パラメータnが予め定めた数Tn以上であれば(ステップ212)、ステップ208で取得した衛星測位位置Ps(t)を現在位置P(t)として出力し(ステップ224)、パラメータnを0に初期化し(ステップ226)、ステップ208からの処理に戻る。
【0018】
一方、衛星測位品質が所定レベル以上良好でなく(ステップ210)、かつ、パラメータnが予め定めた数Tn未満であれば(ステップ212)、ステップ208で取得した速度ベクトルV(t)に、前回、現在位置P(t-1)出力してから現在までの経過時間を乗じ、速度ベクトル基準移動ベクトルVd(t)を算出する(ステップ214)。
【0019】
また、ステップ208で取得した衛星測位位置Ps(t)の前回出力した現在位置P(t-1)からの移動距離と移動方向を表す衛星測位位置基準移動ベクトルVs(t)=Ps(t)-P(t-1)を算出する(ステップ216)。
次に、ステップ214で算出した速度ベクトル基準移動ベクトルVd(t)とステップ216で算出した衛星測位位置基準移動ベクトルVs(t)の差分ベクトルVs(t)-Vd(t)の大きさが、所定のしきい値Th未満であるかどうかを求める(ステップ218)。
【0020】
そして、差分ベクトルVs(t)-Vd(t)の大きさが、所定のしきい値Th未満であれば(ステップ218)、ステップ208で取得した衛星測位位置Ps(t)を現在位置P(t)として出力し(ステップ224)、パラメータnを0に初期化し(ステップ226)、ステップ208からの処理に戻る。
【0021】
一方、差分ベクトルVs(t)-Vd(t)の大きさが、所定のしきい値Th以上であれば(ステップ218)、前回出力した現在位置P(t-1)に速度ベクトル基準移動ベクトルVd(t)を加えた位置を現在位置P(t)として出力する(ステップ220)。
そしてパラメータnを1増加し(ステップ222)、ステップ208からの処理に戻る。
以上、位置算出部16が行う位置算出処理について説明した。
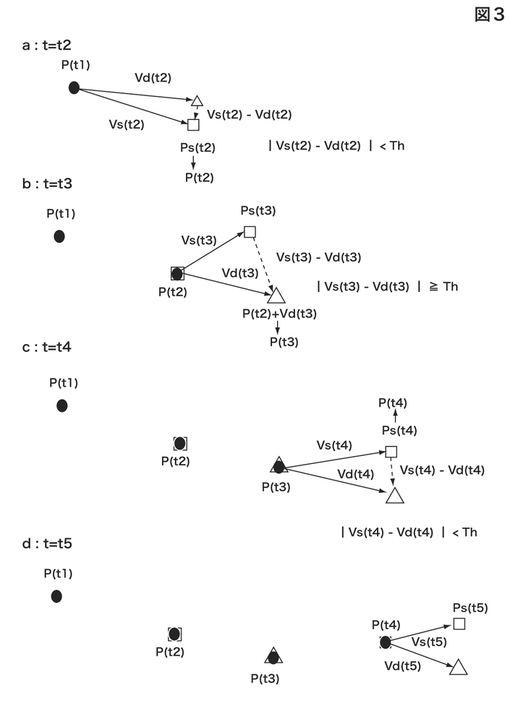
ここで、このような位置算出処理の処理例を図3に示す。
いま、図3aに示すように、現在位置P(t1)が算出されたt1の時刻の次のt2の時刻において、時刻t1の現在位置P(t1)と衛星測位部14で算出された時刻t2の衛星測位位置Ps(t2)に基づく時刻t2の衛星測位位置基準移動ベクトルVs(t2)と、速度ベクトル算出部15において算出された時刻t2の速度ベクトルV(t2)に基づく時刻t2の速度ベクトル基準移動ベクトルVd(t2)が求められた場合、衛星測位位置基準移動ベクトルVs(t2)と速度ベクトル基準移動ベクトルVd(t2)の差分ベクトルの大きさはしきい値Thより小さいので、衛星測位部14で算出された時刻t2の衛星測位位置Ps(t2)が、時刻t2の現在位置P(t2)として算出される。
【0022】
そして、図3bに示すように、時刻t2の次の時刻t3において、時刻t2の現在位置P(t2)と衛星測位部14で算出された時刻t3の衛星測位位置Ps(t3)に基づく時刻t3の衛星測位位置基準移動ベクトルVs(t3)と、速度ベクトル算出部15において算出された時刻t3の速度ベクトルV(t3)に基づく時刻t3の速度ベクトル基準移動ベクトルVd(t3)が求められた場合、衛星測位位置基準移動ベクトルVs(t3)と速度ベクトル基準移動ベクトルVd(t3)の差分ベクトルの大きさはしきい値Thより大きいので、時刻t2の現在位置P(t2)に時刻t3の速度ベクトル基準移動ベクトルVd(t3)を加えた位置P(t2)+Vd(t3)が、時刻t3の現在位置P(t3)として算出される。
【0023】
また、次に、図3cに示すように、時刻t3の次の時刻t4において、時刻t3の現在位置P(t3)と衛星測位部14で算出された時刻t4の衛星測位位置Ps(t4)に基づく時刻t4の衛星測位位置基準移動ベクトルVs(t4)と、速度ベクトル算出部15において算出された時刻t4の速度ベクトルV(t4)に基づく時刻t4の速度ベクトル基準移動ベクトルVd(t4)が求められた場合、衛星測位位置基準移動ベクトルVs(t4)と速度ベクトル基準移動ベクトルVd(t4)の差分ベクトルの大きさはしきい値Thより小さいので、衛星測位部14で算出された時刻t4の衛星測位位置Ps(t4)が、時刻t4の現在位置P(t4)として算出される。
【0024】
そして、図3dに時刻t3の次の時刻t4について示すように、時刻t3の次の時刻t4以降の各時点tにおいても同様にして、逐次、現在位置P(t)が算出されていく。
以上、本発明の実施形態について説明した。
以上のように、本実施形態によれば、各時点tにおいて、直前の時点で算出した現在位置P(t-1)と衛星測位部14で算出された時刻tの衛星測位位置Ps(t)に基づく時刻tの衛星測位位置基準移動ベクトルVs(t)と、速度ベクトル算出部15において算出された時刻tの速度ベクトルV(t)に基づく時刻tの時刻t-1に対する移動量と移動方向を表す速度ベクトル基準移動ベクトルVd(t)を求め、衛星測位位置基準移動ベクトルVs(t)と速度ベクトル基準移動ベクトルVd(t)の差分ベクトルの大きさがしきい値Th以上であるかどうかを調べる。
【0025】
そして、衛星測位位置基準移動ベクトルVs(t)と速度ベクトル基準移動ベクトルVd(t)の差分ベクトルの大きさがしきい値Th以上であれば、衛星測位位置Ps(t)に誤りが発生しているものと見なして、衛星測位位置Ps(t)に代えて、直前の時点で算出した現在位置P(t-1)に時刻tの速度ベクトル基準移動ベクトルVd(t)を加えた位置を時刻tの現在位置P(t)として算出する。一方、衛星測位位置基準移動ベクトルVs(t)と速度ベクトル基準移動ベクトルVd(t)の差分ベクトルの大きさがしきい値Th以上でなければ、衛星測位位置Ps(t)に誤りは発生していないものと見なして、衛星測位位置Ps(t)を時刻tの現在位置P(t)として算出する。
【0026】
ここで、衛星測位位置Ps(t)と速度ベクトルV(t)は、相互に異なる原理によって算出されるものであり、衛星測位位置Ps(t)に比べ速度ベクトルV(t)の精度の劣化の頻度や程度は小さい。よって、このように、衛星測位位置基準移動ベクトルVs(t)と速度ベクトル基準移動ベクトルVd(t)の差分ベクトルの大きさがしきい値Th以上であれば、衛星測位位置Ps(t)に誤りが発生しているものと見なすようにすることにより、より精度良く、衛星測位位置Ps(t)の誤差発生を検出し、真に誤差が発生している場合にのみ、速度ベクトルV(t)を利用して次善的に求めた現在位置を現在位置P(t)として出力し、他の場合には、衛星測位位置Ps(t)を現在位置P(t)として出力することができる。
【0027】
よって、全体として、より精度良く現在位置を算出することができるようになる。
また、以上によれば、衛星測位品質が所定レベル以上良好である場合や、速度ベクトルV(t)を利用した現在位置P(t)の算出回数が予め定めた数Tn以上となった場合には、無条件に衛星測位位置Ps(t)を現在位置P(t)として出力するので、速度ベクトルV(t)を利用した現在位置P(t)の算出の繰り返しによる、速度ベクトルの誤差による現在位置への誤差の蓄積を抑制することができる。
【符号の説明】
【0028】
1…GPS受信機、2…GPS計測位置利用装置、11…アンテナ、12…RF処理部、13…復調部、14…衛星測位部、15…速度ベクトル算出部、16…位置算出部、17…制御部。
【技術分野】
【0001】
本発明は、衛星からの受信信号に基づいて現在位置を測定する衛星測位装置に関するものである。
【背景技術】
【0002】
複数の衛星と自動車等の移動体と共に移動する衛星測位装置とより構成される衛星航法システムとしては、GPS(Global Positioning System)が広く利用されている。
また、このようなGPSにおける衛星測位装置であるGPS受信機における測位の技術としては、コード測位方式や搬送波測位方式と呼ばれる、衛星からの受信信号の伝搬遅延より求まる衛星までの距離に基づいて位置を測定する衛星測位に加えて、衛星からの受信信号のドップラシフト量から求まる速度ベクトルより算出した移動ベクトルを利用して現在位置の測定を行う技術が知られている。
【0003】
すなわち、たとえば、衛星測位で測定した位置が所定のしきい値より大きく変化した場合に、衛星測位で測定した位置に誤差が発生しているものと見なして、その後の所定期間、前回算出した現在位置に、ドップラシフト量から求まる速度ベクトルより算出した移動ベクトルを加えた位置を、今回の現在位置として算出する技術や(たとえば、特許文献1)、今回衛星測位で算出した位置の前回算出した現在位置に対する移動ベクトルを、衛星からの受信信号のドップラシフト量から求まる速度ベクトルより算出した移動ベクトルを用いて平滑化し、平滑化した移動ベクトルを、前回算出した現在位置に加えた位置を、今回の現在位置として算出する技術(たとえば、特許文献2)が知られている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2005-300167号公報
【特許文献2】特開2009-025045号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
前述した特許文献1記載の技術によれば、衛星測位で測定した位置が所定のしきい値より大きく変化した場合に、衛星測位で測定した位置に誤差が発生しているものと見なして、その後、所定期間、衛星からの受信信号のドップラシフト量から求まる速度ベクトルより算出した移動ベクトルを用いた現在位置の算出を行うが、衛星測位で測定した位置が所定のしきい値より大きく変化したか否かのみによっては、様々な要因によって発生する衛星測位の誤差の全てについて、精度良く、当該誤差の発生を検出することはできない。すなわち、たとえば、衛星測位の誤差によって生じた変化と、真の位置の変化との大きさが等しい場合に、衛星測位で測定した位置の変化の大きさのみによっては、これを弁別することはできない。
【0006】
また、当該特許文献1記載の技術によれば、衛星測位で測定した位置に誤差が発生しているものと見なした場合に、無条件に、その後、所定期間、衛星からの受信信号のドップラシフト量から求まる速度ベクトルより算出した移動ベクトルを用いた現在位置の算出を行うため、当該所定期間中に、衛星測位の誤差が解消したとしても、当該誤差の無い衛星測位によって測定した位置を現在位置として算出することができない。
【0007】
よって、当該特許文献1記載の技術によれば、必ずしも常に精度良く現在位置を算出することができない。
また、前述した特許文献2記載の技術では、算出される現在位置の軌跡を平滑化することはできるが、衛星測位で測定した位置に生じた誤差に起因する、現在位置の算出誤差の低減を充分に図ることはできない。
そこで、本発明は、衛星測位に加えて衛星からの受信信号のドップラシフト量から求まる速度ベクトルより算出した移動ベクトルを利用して現在位置を算出する衛星測位装置において、より精度良く現在位置を算出することを課題とする。
【課題を解決するための手段】
【0008】
前記課題達成のために、本発明は、衛星から受信した信号に基づいて現在位置の測位を行う衛星測位装置に、衛星から受信した信号を用いた衛星測位によって、現時点の位置を衛星測位位置として算出する衛星測位部と、衛星から受信した信号に発生しているドップラシフト量に基づいて、現時点の速度ベクトルを算出する速度ベクトル算出部と、繰り返し現在位置を算出する現在位置算出部とを備え、前記現在位置算出部において、前記現在位置の算出の各回において、前記衛星測位位置と前記速度ベクトルとを取得し、今回取得した衛星測位位置の前回算出した前記現在位置からの移動方向と移動量を表す移動ベクトルである第1移動ベクトルと、今回取得した前記速度ベクトルより求まる前回現在位置を算出した時点からの移動方向と移動量を表す移動ベクトルである第2移動ベクトルとを算出し、当該第1ベクトルと当該第2ベクトルとの差分ベクトルの大きさが所定の大きさより小さい場合に、今回取得した衛星測位位置を今回の現在位置として算出し、前記差分ベクトルの大きさが前記所定の大きさ以上である場合に、前回算出した前記現在位置に今回算出した前記第2移動ベクトルを加えた位置を、今回の現在位置として算出するようにしたものである。
【0009】
ここで、衛星測位位置と速度ベクトルは、相互に異なる原理によって算出されるものであり、衛星測位位置に比べ速度ベクトルの精度の劣化の頻度や程度は小さい。
よって、以上の衛星測位装置によれば、当該第1ベクトルと当該第2ベクトルとの差分ベクトルの大きさによって、衛星測位位置に真に誤差が発生しているかどうかを精度良く検出し、衛星測位位置に真に誤差が発生している場合にのみ、速度ベクトルを利用して次善的に求めた現在位置を現在位置として出力し、他の場合には、誤差が発生していない正しい衛星測位位置を現在位置として出力することができる。
【0010】
よって、全体として、より精度良く現在位置を算出することができるようになる。
ここで、このような衛星測位装置は、前記現在位置算出部において、前記差分ベクトルの大きさが前記所定の大きさ以上であっても、前回までの所定数以上の連続した各回において、当該回の前回に算出した前記現在位置に当該回において算出した前記第2移動ベクトルを加えた位置を、当該回の現在位置として算出している場合には、前回算出した前記現在位置に今回算出した前記第2移動ベクトルを加えた位置を、今回の現在位置として算出せずに、今回取得した衛星測位位置を今回の現在位置として算出するように構成してもよい。また、このような衛星測位装置に、前記衛星測位部における衛星測位の衛星測位の誤差要因の大きさを算定する衛星測位品質評価手段を設け、前記現在位置算出部において、前記差分ベクトルの大きさが前記所定の大きさ以上であっても、前記衛星測位品質評価手段が算定する誤差要因の大きさが所定レベルよりも小さい場合には、前回算出した前記現在位置に今回算出した前記第2移動ベクトルを加えた位置を、今回の現在位置として算出せずに、今回取得した衛星測位位置を今回の現在位置として算出するように構成してもよい。
【0011】
これらのようにすることにより、前回算出した前記現在位置に、速度ベクトルに基づいて今回算出した前記第2移動ベクトルを加えた位置を現在位置とすることを繰り返すことによる、速度ベクトルの誤差による現在位置への誤差の蓄積を抑制することができる。
【発明の効果】
【0012】
以上のように、本発明によれば、衛星測位に加えて衛星からの受信信号のドップラシフト量から求まる速度ベクトルより算出した移動ベクトルを利用して現在位置を算出する衛星測位装置において、より精度良く現在位置を算出することができる。
【図面の簡単な説明】
【0013】
【図1】本発明の実施形態に係る車載システムの構成を示すブロック図である。
【図2】本発明の実施形態に係る位置算出処理を示すフローチャートである。
【図3】本発明の実施形態に係る位置算出処理の処理例を示す図である。
【発明を実施するための形態】
【0014】
以下、本発明の実施形態について説明する。
図1に、本実施形態に係る車載システムの構成を示す。
本車載システムは、自動車に搭載されるシステムであり、図示するように、各時点において現在位置P(t)を算出し出力するGPS受信機1と、カーナビゲーション装置などの、GPS受信機1が出力する現在位置P(t)を利用した処理を行うGPS計測位置利用装置2とを備えている。
【0015】
そして、GPS受信機1は、アンテナ11、RF処理部12、復調部13、衛星測位部14、速度ベクトル算出部15、位置算出部16、制御部17とを有する。
RF処理部12は、アンテナ11による受信信号の増幅や中間周波数信号への変換などを行う。復調部13は、RF処理部12が処理した信号から、各衛星が送信した送信信号を抽出し、そのベースバンド信号を復調する。
制御部17は、各衛星の送信電波の受信電界強度や、各衛星の送信電波のS/Nや、各衛星の仰角や、位置の決定精度を表すDOP/GDOP値や、利用者等価測距誤差UEREなどの衛星測位の誤差要因の大きさを表す各量を算出して評価し、より少ない誤差で衛星測位を行える複数の衛星を選択する。
【0016】
衛星測位部14は、制御部17が選択した衛星からのベースバンド信号を用い、コード測位方式によって、衛星からの受信信号の伝搬遅延より求まる衛星までの距離に基づいて位置を算出する衛星測位を行い、衛星測位位置Ps(t)を出力する。
速度ベクトル算出部15は、制御部17が選択した衛星が送信した送信信号のドップラシフト量より速度ベクトルV(t)を算出し出力する。
そして、位置算出部16は、以下に示す位置算出処理を行って現在位置P(t)を算出する。
図2に、この位置算出処理の手順を示す。
図示するように、この位置算出処理では、まず、ステップ202-206の初期処理を行う。
初期処理では、衛星測位部14から現在の衛星測位位置Ps(t)を取得し(ステップ202)、取得した衛星測位位置Ps(t)を現在位置P(t)として出力し(ステップ204)、パラメータnを0に設定する(ステップ206)。
そして、初期処理を終了したならば、以降は以下の処理を行う。
すなわち、まず、衛星測位部14から現在の衛星測位位置Ps(t)を取得すると共に、速度ベクトル算出部15から速度ベクトルV(t)を取得する(ステップ208)。
そして、衛星測位品質が所定レベル以上良好であるかどうかと(ステップ210)、パラメータnが予め定めた数Tn未満であるか(ステップ212)どうかを調べる。
ここで、衛星測位品質が所定レベル以上良好であるかどうかは、制御部17が選択している各衛星または各衛星の組み合わせについて、制御部17が算出している、各衛星の送信電波の受信電界強度やS/Nや、位置の決定精度を表すDOP/GDOP値や、利用者等価測距誤差UEREなどの衛星測位の誤差要因の大きさを表す各量に基づいて判定する。
【0017】
そして、衛星測位品質が所定レベル以上良好であるか(ステップ210)、パラメータnが予め定めた数Tn以上であれば(ステップ212)、ステップ208で取得した衛星測位位置Ps(t)を現在位置P(t)として出力し(ステップ224)、パラメータnを0に初期化し(ステップ226)、ステップ208からの処理に戻る。
【0018】
一方、衛星測位品質が所定レベル以上良好でなく(ステップ210)、かつ、パラメータnが予め定めた数Tn未満であれば(ステップ212)、ステップ208で取得した速度ベクトルV(t)に、前回、現在位置P(t-1)出力してから現在までの経過時間を乗じ、速度ベクトル基準移動ベクトルVd(t)を算出する(ステップ214)。
【0019】
また、ステップ208で取得した衛星測位位置Ps(t)の前回出力した現在位置P(t-1)からの移動距離と移動方向を表す衛星測位位置基準移動ベクトルVs(t)=Ps(t)-P(t-1)を算出する(ステップ216)。
次に、ステップ214で算出した速度ベクトル基準移動ベクトルVd(t)とステップ216で算出した衛星測位位置基準移動ベクトルVs(t)の差分ベクトルVs(t)-Vd(t)の大きさが、所定のしきい値Th未満であるかどうかを求める(ステップ218)。
【0020】
そして、差分ベクトルVs(t)-Vd(t)の大きさが、所定のしきい値Th未満であれば(ステップ218)、ステップ208で取得した衛星測位位置Ps(t)を現在位置P(t)として出力し(ステップ224)、パラメータnを0に初期化し(ステップ226)、ステップ208からの処理に戻る。
【0021】
一方、差分ベクトルVs(t)-Vd(t)の大きさが、所定のしきい値Th以上であれば(ステップ218)、前回出力した現在位置P(t-1)に速度ベクトル基準移動ベクトルVd(t)を加えた位置を現在位置P(t)として出力する(ステップ220)。
そしてパラメータnを1増加し(ステップ222)、ステップ208からの処理に戻る。
以上、位置算出部16が行う位置算出処理について説明した。
ここで、このような位置算出処理の処理例を図3に示す。
いま、図3aに示すように、現在位置P(t1)が算出されたt1の時刻の次のt2の時刻において、時刻t1の現在位置P(t1)と衛星測位部14で算出された時刻t2の衛星測位位置Ps(t2)に基づく時刻t2の衛星測位位置基準移動ベクトルVs(t2)と、速度ベクトル算出部15において算出された時刻t2の速度ベクトルV(t2)に基づく時刻t2の速度ベクトル基準移動ベクトルVd(t2)が求められた場合、衛星測位位置基準移動ベクトルVs(t2)と速度ベクトル基準移動ベクトルVd(t2)の差分ベクトルの大きさはしきい値Thより小さいので、衛星測位部14で算出された時刻t2の衛星測位位置Ps(t2)が、時刻t2の現在位置P(t2)として算出される。
【0022】
そして、図3bに示すように、時刻t2の次の時刻t3において、時刻t2の現在位置P(t2)と衛星測位部14で算出された時刻t3の衛星測位位置Ps(t3)に基づく時刻t3の衛星測位位置基準移動ベクトルVs(t3)と、速度ベクトル算出部15において算出された時刻t3の速度ベクトルV(t3)に基づく時刻t3の速度ベクトル基準移動ベクトルVd(t3)が求められた場合、衛星測位位置基準移動ベクトルVs(t3)と速度ベクトル基準移動ベクトルVd(t3)の差分ベクトルの大きさはしきい値Thより大きいので、時刻t2の現在位置P(t2)に時刻t3の速度ベクトル基準移動ベクトルVd(t3)を加えた位置P(t2)+Vd(t3)が、時刻t3の現在位置P(t3)として算出される。
【0023】
また、次に、図3cに示すように、時刻t3の次の時刻t4において、時刻t3の現在位置P(t3)と衛星測位部14で算出された時刻t4の衛星測位位置Ps(t4)に基づく時刻t4の衛星測位位置基準移動ベクトルVs(t4)と、速度ベクトル算出部15において算出された時刻t4の速度ベクトルV(t4)に基づく時刻t4の速度ベクトル基準移動ベクトルVd(t4)が求められた場合、衛星測位位置基準移動ベクトルVs(t4)と速度ベクトル基準移動ベクトルVd(t4)の差分ベクトルの大きさはしきい値Thより小さいので、衛星測位部14で算出された時刻t4の衛星測位位置Ps(t4)が、時刻t4の現在位置P(t4)として算出される。
【0024】
そして、図3dに時刻t3の次の時刻t4について示すように、時刻t3の次の時刻t4以降の各時点tにおいても同様にして、逐次、現在位置P(t)が算出されていく。
以上、本発明の実施形態について説明した。
以上のように、本実施形態によれば、各時点tにおいて、直前の時点で算出した現在位置P(t-1)と衛星測位部14で算出された時刻tの衛星測位位置Ps(t)に基づく時刻tの衛星測位位置基準移動ベクトルVs(t)と、速度ベクトル算出部15において算出された時刻tの速度ベクトルV(t)に基づく時刻tの時刻t-1に対する移動量と移動方向を表す速度ベクトル基準移動ベクトルVd(t)を求め、衛星測位位置基準移動ベクトルVs(t)と速度ベクトル基準移動ベクトルVd(t)の差分ベクトルの大きさがしきい値Th以上であるかどうかを調べる。
【0025】
そして、衛星測位位置基準移動ベクトルVs(t)と速度ベクトル基準移動ベクトルVd(t)の差分ベクトルの大きさがしきい値Th以上であれば、衛星測位位置Ps(t)に誤りが発生しているものと見なして、衛星測位位置Ps(t)に代えて、直前の時点で算出した現在位置P(t-1)に時刻tの速度ベクトル基準移動ベクトルVd(t)を加えた位置を時刻tの現在位置P(t)として算出する。一方、衛星測位位置基準移動ベクトルVs(t)と速度ベクトル基準移動ベクトルVd(t)の差分ベクトルの大きさがしきい値Th以上でなければ、衛星測位位置Ps(t)に誤りは発生していないものと見なして、衛星測位位置Ps(t)を時刻tの現在位置P(t)として算出する。
【0026】
ここで、衛星測位位置Ps(t)と速度ベクトルV(t)は、相互に異なる原理によって算出されるものであり、衛星測位位置Ps(t)に比べ速度ベクトルV(t)の精度の劣化の頻度や程度は小さい。よって、このように、衛星測位位置基準移動ベクトルVs(t)と速度ベクトル基準移動ベクトルVd(t)の差分ベクトルの大きさがしきい値Th以上であれば、衛星測位位置Ps(t)に誤りが発生しているものと見なすようにすることにより、より精度良く、衛星測位位置Ps(t)の誤差発生を検出し、真に誤差が発生している場合にのみ、速度ベクトルV(t)を利用して次善的に求めた現在位置を現在位置P(t)として出力し、他の場合には、衛星測位位置Ps(t)を現在位置P(t)として出力することができる。
【0027】
よって、全体として、より精度良く現在位置を算出することができるようになる。
また、以上によれば、衛星測位品質が所定レベル以上良好である場合や、速度ベクトルV(t)を利用した現在位置P(t)の算出回数が予め定めた数Tn以上となった場合には、無条件に衛星測位位置Ps(t)を現在位置P(t)として出力するので、速度ベクトルV(t)を利用した現在位置P(t)の算出の繰り返しによる、速度ベクトルの誤差による現在位置への誤差の蓄積を抑制することができる。
【符号の説明】
【0028】
1…GPS受信機、2…GPS計測位置利用装置、11…アンテナ、12…RF処理部、13…復調部、14…衛星測位部、15…速度ベクトル算出部、16…位置算出部、17…制御部。
【特許請求の範囲】
【請求項1】
衛星から受信した信号に基づいて現在位置の測位を行う衛星測位装置であって、
衛星から受信した信号を用いた衛星測位によって、現時点の位置を衛星測位位置として算出する衛星測位部と、
衛星から受信した信号に発生しているドップラシフト量に基づいて、現時点の速度ベクトルを算出する速度ベクトル算出部と、
繰り返し現在位置を算出する現在位置算出部とを有し、
前記現在位置算出部は、前記現在位置の算出の各回において、前記衛星測位位置と前記速度ベクトルとを取得し、今回取得した衛星測位位置の前回算出した前記現在位置からの移動方向と移動量を表す移動ベクトルである第1移動ベクトルと、今回取得した前記速度ベクトルより求まる前回現在位置を算出した時点からの移動方向と移動量を表す移動ベクトルである第2移動ベクトルとを算出し、当該第1ベクトルと当該第2ベクトルとの差分ベクトルの大きさが所定の大きさより小さい場合に、今回取得した衛星測位位置を今回の現在位置として算出し、前記差分ベクトルの大きさが前記所定の大きさ以上である場合に、前回算出した前記現在位置に今回算出した前記第2移動ベクトルを加えた位置を、今回の現在位置として算出することを特徴とする衛星測位装置。
【請求項2】
請求項1記載の衛星測位装置であって、
前記現在位置算出部は、前記差分ベクトルの大きさが前記所定の大きさ以上であっても、前回までの所定数以上の連続した各回において、当該回の前回に算出した前記現在位置に当該回において算出した前記第2移動ベクトルを加えた位置を、当該回の現在位置として算出している場合には、前回算出した前記現在位置に今回算出した前記第2移動ベクトルを加えた位置を、今回の現在位置として算出せずに、今回取得した衛星測位位置を今回の現在位置として算出することを特徴とする衛星測位装置。
【請求項3】
請求項1記載の衛星測位装置であって、
前記衛星測位部における衛星測位の衛星測位の誤差要因の大きさを算定する衛星測位品質評価手段を有し、
前記現在位置算出部は、前記差分ベクトルの大きさが前記所定の大きさ以上であっても、前記衛星測位品質評価手段が算定する誤差要因の大きさが所定レベルよりも小さい場合には、前回算出した前記現在位置に今回算出した前記第2移動ベクトルを加えた位置を、今回の現在位置として算出せずに、今回取得した衛星測位位置を今回の現在位置として算出することを特徴とする衛星測位装置。
【請求項4】
衛星測位装置において、衛星から受信した信号に基づいて現在位置の測位を行う現在位置算出方法えあって、
前記衛星測位装置が、衛星から受信した信号を用いた衛星測位によって、現時点の位置を衛星測位位置として算出する衛星測位ステップと、
前記衛星測位装置が、衛星から受信した信号に発生しているドップラシフト量に基づいて、現時点の速度ベクトルを算出する速度ベクトル算出ステップと、
前記衛星測位装置が、繰り返し現在位置を算出する現在位置算出ステップとを有し、
前記現在位置算出ステップは、前記現在位置の算出の各回において、前記衛星測位位置と前記速度ベクトルとを取得し、今回取得した衛星測位位置の前回算出した前記現在位置からの移動方向と移動量を表す移動ベクトルである第1移動ベクトルと、今回取得した前記速度ベクトルより求まる前回現在位置を算出した時点からの移動方向と移動量を表す移動ベクトルである第2移動ベクトルとを算出し、当該第1ベクトルと当該第2ベクトルとの差分ベクトルの大きさが所定の大きさより小さい場合に、今回取得した衛星測位位置を今回の現在位置として算出し、前記差分ベクトルの大きさが前記所定の大きさ以上である場合に、前回算出した前記現在位置に今回算出した前記第2移動ベクトルを加えた位置を、今回の現在位置として算出するステップであることを特徴とする現在位置算出方法。
【請求項1】
衛星から受信した信号に基づいて現在位置の測位を行う衛星測位装置であって、
衛星から受信した信号を用いた衛星測位によって、現時点の位置を衛星測位位置として算出する衛星測位部と、
衛星から受信した信号に発生しているドップラシフト量に基づいて、現時点の速度ベクトルを算出する速度ベクトル算出部と、
繰り返し現在位置を算出する現在位置算出部とを有し、
前記現在位置算出部は、前記現在位置の算出の各回において、前記衛星測位位置と前記速度ベクトルとを取得し、今回取得した衛星測位位置の前回算出した前記現在位置からの移動方向と移動量を表す移動ベクトルである第1移動ベクトルと、今回取得した前記速度ベクトルより求まる前回現在位置を算出した時点からの移動方向と移動量を表す移動ベクトルである第2移動ベクトルとを算出し、当該第1ベクトルと当該第2ベクトルとの差分ベクトルの大きさが所定の大きさより小さい場合に、今回取得した衛星測位位置を今回の現在位置として算出し、前記差分ベクトルの大きさが前記所定の大きさ以上である場合に、前回算出した前記現在位置に今回算出した前記第2移動ベクトルを加えた位置を、今回の現在位置として算出することを特徴とする衛星測位装置。
【請求項2】
請求項1記載の衛星測位装置であって、
前記現在位置算出部は、前記差分ベクトルの大きさが前記所定の大きさ以上であっても、前回までの所定数以上の連続した各回において、当該回の前回に算出した前記現在位置に当該回において算出した前記第2移動ベクトルを加えた位置を、当該回の現在位置として算出している場合には、前回算出した前記現在位置に今回算出した前記第2移動ベクトルを加えた位置を、今回の現在位置として算出せずに、今回取得した衛星測位位置を今回の現在位置として算出することを特徴とする衛星測位装置。
【請求項3】
請求項1記載の衛星測位装置であって、
前記衛星測位部における衛星測位の衛星測位の誤差要因の大きさを算定する衛星測位品質評価手段を有し、
前記現在位置算出部は、前記差分ベクトルの大きさが前記所定の大きさ以上であっても、前記衛星測位品質評価手段が算定する誤差要因の大きさが所定レベルよりも小さい場合には、前回算出した前記現在位置に今回算出した前記第2移動ベクトルを加えた位置を、今回の現在位置として算出せずに、今回取得した衛星測位位置を今回の現在位置として算出することを特徴とする衛星測位装置。
【請求項4】
衛星測位装置において、衛星から受信した信号に基づいて現在位置の測位を行う現在位置算出方法えあって、
前記衛星測位装置が、衛星から受信した信号を用いた衛星測位によって、現時点の位置を衛星測位位置として算出する衛星測位ステップと、
前記衛星測位装置が、衛星から受信した信号に発生しているドップラシフト量に基づいて、現時点の速度ベクトルを算出する速度ベクトル算出ステップと、
前記衛星測位装置が、繰り返し現在位置を算出する現在位置算出ステップとを有し、
前記現在位置算出ステップは、前記現在位置の算出の各回において、前記衛星測位位置と前記速度ベクトルとを取得し、今回取得した衛星測位位置の前回算出した前記現在位置からの移動方向と移動量を表す移動ベクトルである第1移動ベクトルと、今回取得した前記速度ベクトルより求まる前回現在位置を算出した時点からの移動方向と移動量を表す移動ベクトルである第2移動ベクトルとを算出し、当該第1ベクトルと当該第2ベクトルとの差分ベクトルの大きさが所定の大きさより小さい場合に、今回取得した衛星測位位置を今回の現在位置として算出し、前記差分ベクトルの大きさが前記所定の大きさ以上である場合に、前回算出した前記現在位置に今回算出した前記第2移動ベクトルを加えた位置を、今回の現在位置として算出するステップであることを特徴とする現在位置算出方法。
【図1】


【図2】
【図3】
【図2】
【図3】
【公開番号】特開2012−108015(P2012−108015A)
【公開日】平成24年6月7日(2012.6.7)
【国際特許分類】
【出願番号】特願2010−257497(P2010−257497)
【出願日】平成22年11月18日(2010.11.18)
【出願人】(000101732)アルパイン株式会社 (2,424)
【Fターム(参考)】
【公開日】平成24年6月7日(2012.6.7)
【国際特許分類】
【出願日】平成22年11月18日(2010.11.18)
【出願人】(000101732)アルパイン株式会社 (2,424)
【Fターム(参考)】
[ Back to top ]