
衛星航法システム受信機、その制御方法、電子デバイス、及びその制御方法
【課題】衛星航法システム受信機の時計の時刻を衛星航法システムに頼らずに設定する技術を提供する。
【解決手段】電子デバイスと通信可能であり、電源から供給される電力で動作する時計を備える衛星航法システム受信機であって、衛星航法システムから第1時刻情報を受信する第1受信手段と、前記時計の時刻を前記第1時刻情報が示す時刻に設定する第1設定手段と、前記時計の動作に必要な電力が前記時計に供給されない電力不足状態の発生を検知する検知手段と、前記電力不足状態の発生が検知されたか否かを示す検知情報を記憶する記憶手段と、前記検知情報を前記電子デバイスへ送信する送信手段と、前記検知情報の送信に応えて送信された前記電子デバイスから第2時刻情報を受信する第2受信手段と、前記時計の時刻を前記第2時刻情報が示す時刻に設定する第2設定手段と、を備えることを特徴とする衛星航法システム受信機を提供する。
【解決手段】電子デバイスと通信可能であり、電源から供給される電力で動作する時計を備える衛星航法システム受信機であって、衛星航法システムから第1時刻情報を受信する第1受信手段と、前記時計の時刻を前記第1時刻情報が示す時刻に設定する第1設定手段と、前記時計の動作に必要な電力が前記時計に供給されない電力不足状態の発生を検知する検知手段と、前記電力不足状態の発生が検知されたか否かを示す検知情報を記憶する記憶手段と、前記検知情報を前記電子デバイスへ送信する送信手段と、前記検知情報の送信に応えて送信された前記電子デバイスから第2時刻情報を受信する第2受信手段と、前記時計の時刻を前記第2時刻情報が示す時刻に設定する第2設定手段と、を備えることを特徴とする衛星航法システム受信機を提供する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、衛星航法システム受信機、その制御方法、電子デバイス、及びその制御方法に関する。
【背景技術】
【0002】
衛星航法システム受信機、例えばGPS受信機を備えているデバイス(GPSデバイス)は、GPS衛星を利用した測位を行うことにより正確な位置情報及び時刻情報を得ることができる。GPSデバイスは、得られた正確な時刻情報を用いて、自身が持つ時計の時刻のずれを演算し、自身の時計の時刻情報を補正することができる。GPSデバイスは、得られた時刻情報などのデータをバックアップし、電源投入時におけるGPS衛星の位置予測に利用している。
【0003】
一方GPS受信機を備えていない電子デバイスは、GPSデバイスと通信を行うことにより、正確な時刻情報をGPSデバイスから取得して自身の時計の時刻情報を更新することができる。
【0004】
例えば、特許文献1によれば、デジタルカメラは、クレードル内にあるGPS部で得られた正確な時刻情報をクレードルから得ることより、デジタルカメラ内の時刻情報を更新する。特許文献1は、GPS部を備えるクレードルが正確な時刻情報を得た後の動作を説明しており、また、時刻情報は、GPS部を備えるクレードルからデジタルカメラへの一方向だけに通信される。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特許第4027104号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
従来のGPSデバイスは、時計の時刻が何らかの原因で大きくずれてしまった場合、GPS衛星から時刻情報を取得するまでは他に時刻を自動更新する手段を持たない。例えば、GPSデバイスは一般的に、電源オフ時にも時刻をカウントするために、リアルタイムクロックを有している。このリアルタイムクロックはバックアップ電池により動作するが、バックアップ電池が消耗してリアルタイムクロックの動作可能電圧以下まで垂下した場合には、時刻情報はリセットされてしまう。そのため、このような状態になってしまうと時刻情報を自動更新する手段がないため、GPSデバイスのリアルタイムクロックによる時刻情報は正確な時刻から大きくずれたままになってしまう。
【0007】
前述の通り、GPS受信機は一般的に、電源投入時には自身の時計の時刻情報を利用して最初に探すGPS衛星の位置を予測してから測位を開始する。そのため、時刻情報が大きくずれている場合にはGPS衛星の予測位置も大きくずれることになるので、電源投入から測位を開始するまでの時間が非常に長くなり、場合によっては、まったく測位を開始できなくなってしまうこともあった。
【0008】
本発明はこのような状況に鑑みてなされたものであり、衛星航法システム受信機の時計の時刻を衛星航法システムに頼らずに設定する技術を提供することを目的とする。
【課題を解決するための手段】
【0009】
上記課題を解決するために、第1の本発明は、電子デバイスと通信可能であり、電源から供給される電力で動作する時計を備える衛星航法システム受信機であって、衛星航法システムから第1時刻情報を受信する第1受信手段と、前記時計の時刻を前記第1時刻情報が示す時刻に設定する第1設定手段と、前記時計の動作に必要な電力が前記時計に供給されない電力不足状態の発生を検知する検知手段と、前記電力不足状態の発生が検知されたか否かを示す検知情報を記憶する記憶手段と、前記検知情報を前記電子デバイスへ送信する送信手段と、前記検知情報の送信に応えて前記電子デバイスから送信された第2時刻情報を受信する第2受信手段と、前記時計の時刻を前記第2時刻情報が示す時刻に設定する第2設定手段と、を備えることを特徴とする衛星航法システム受信機を提供する。
【0010】
なお、その他の本発明の特徴は、添付図面及び以下の発明を実施するための形態における記載によって更に明らかになるものである。
【発明の効果】
【0011】
以上の構成により、本発明によれば、衛星航法システム受信機の時計の時刻を衛星航法システムに頼らずに設定することが可能となる。
【図面の簡単な説明】
【0012】
【図1】第1の実施形態に係るデジタルカメラ100の構成を示すブロック図
【図2】デジタルカメラ100の基本動作を示すフローチャート
【図3】第1の実施形態に係る時刻設定に関連する、デジタルカメラ100及びGPS受信機200の構成を示すブロック図
【図4】GPS受信機200の起動時の処理を示すフローチャート
【図5】図4のS500の処理の詳細を示すフローチャート
【図6】第1の実施形態に係る、デジタルカメラ100が時刻情報を送信する処理を示すフローチャート
【図7】第2の実施形態に係る、デジタルカメラ100が時刻情報を送信する処理を示すフローチャート
【発明を実施するための形態】
【0013】
以下、添付図面を参照して、本発明の実施形態を説明する。なお、本発明の技術的範囲は、特許請求の範囲によって確定されるのであって、以下の個別の実施形態によって限定されるわけではない。また、実施形態の中で説明されている特徴の組み合わせすべてが、本発明に必須とは限らない。
【0014】
以下の各実施形態では、本発明の衛星航法システム受信機及び電子デバイスの例としてGPS受信機及びデジタルカメラを用いるが、本発明はこれに限定されない。例えば、本発明の衛星航法システム受信機はGLONASS受信機であってもよいし、本発明の電子デバイスはラップトップコンピュータであってもよい。
【0015】
[第1の実施形態]
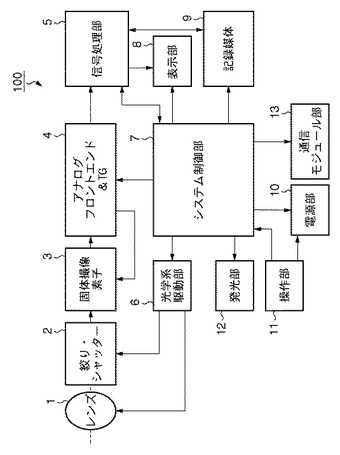
図1は、第1の実施形態に係るデジタルカメラ100の構成を示すブロック図である。レンズ1は、被写体の光学像を固体撮像素子3に結像させる。絞り・シャッター2は、シャッター機能を有し、レンズ1を通る光量を制御するための絞りを兼ねる。固体撮像素子3は、レンズ1で結像された被写体光を電気信号に変換する。
【0016】
アナログフロントエンド&TG部4は、固体撮像素子3や、後述するCDS回路、クランプ回路、及びA/D変換回路のために必要なパルスを発生するタイミングパルス発生回路を含む。アナログフロントエンド&TG部4はまた、固体撮像素子3より出力される電気信号のクロックの除去やノイズの軽減のための相関二重サンプリングを行うCDS回路を含む。アナログフロントエンド&TG部4は更に、所定の基準電圧にクランプするクランプ回路、及びアナログ信号からデジタル信号に変換するA/D変換回路を含む。
【0017】
信号処理部5は、表示や記録などをするために所望の形式となるように種々の信号処理や変換を行う。光学系駆動部6は、レンズ1や絞り・シャッター2を駆動する。システム制御部7は、デジタルカメラ100全体の制御及び各種演算を行う。表示部8は、信号処理部5からの信号を受けLCD等に表示する。記録媒体9は、画像データの記録及び読み出しを行うための、例えば半導体メモリー等を含む。電源部10は、デジタルカメラ100のすべてのブロックに電源を供給する。操作部11は、デジタルカメラ100の電源をオン/オフしたり、モードの切り替えや選択などの操作を行ったりするための操作部である。発光部12は、例えばストロボである。通信モジュール部13は、GPS受信機などの外部デバイスとの通信を行うためのモジュールである。
【0018】
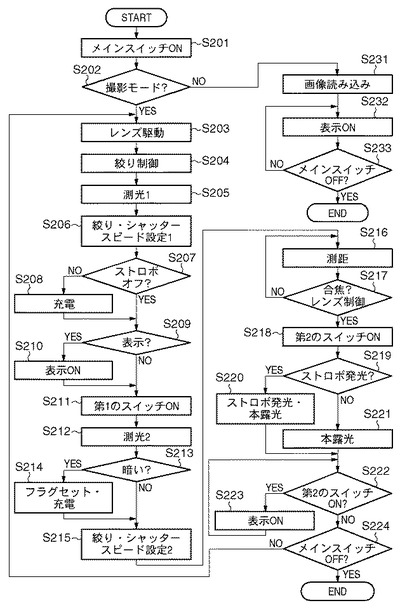
次に、デジタルカメラ100の基本動作を図2のフローチャートを用いて簡単に説明する。デジタルカメラ100の操作部11のメインスイッチがオンされると(S201)、電源部10は動作を開始し、メイン電源及びコントロール系の電源を供給する。システム制御部7は、モードが撮影モードであるか再生モードであるかを判断し(S202)、撮影モードであればS203以降の撮影シーケンスに入り、再生モードであった場合はS231以降の再生シーケンスに入る。
【0019】
再生シーケンスにおいて、システム制御部7は、記録媒体9からデータを一旦信号処理部5に取り込み(S231)、表示のための信号処理を行い、LCD等に画像を表示する(S232)。その後、システム制御部7は、操作部11のメインスイッチがオフされるまで画像を表示し、操作部11のメインスイッチがオフされたら(S233で「Yes」)画像の表示を中止し電源をオフする。
【0020】
撮影シーケンスにおいて、システム制御部7は、レンズ1のAFレンズのレンズ位置をリセット位置まで駆動し(S203)、固体撮像素子3やアナログフロントエンド&TG部4など撮像系回路の電源をオンする。システム制御部7は、光学系駆動部6を制御することにより絞り・シャッター2を開放する(S204)。その後、測光のために、固体撮像素子3を通った信号をアナログフロントエンド&TG部4のCDS回路で相関二重サンプリングし、クランプ回路でOB部をクランプし、A/D変換回路でA/D変換を行い、その変換された画像データを信号処理部5で処理する。更に、システム制御部7は信号処理部5から入力された画像データに基づいて露出制御値を演算する(S205)。この演算結果に応じて、システム制御部7はプログラム線図により、絞り、シャッタースピードを決定して制御する(S206)。
【0021】
その後、システム制御部7は、ストロボのモードを確認し(S207)、ストロボのモードがオフでなければメインコンデンサに充電を行う(S208)。システム制御部7は、表示モードを確認し(S209)、表示ONのモードであればLCD等の表示を行い(S210)、そうでない場合はレリーズスイッチの第1のスイッチがオンされるまで待機する。
【0022】
第1のスイッチがオンされると(S211)、S205と同様に露出制御値の演算が行われる(S212)。その結果に応じて、システム制御部7は再度プログラム線図により、絞り、シャッタースピードを決定して制御する(S215)。但し、S215の処理に先立って、S212の測光の結果としてストロボ等の補助光が必要なくらい暗いか否か、また、ストロボ発光モードがオンとなっているか否かが判定される(S213)。いずれかの判定結果がYesであれば、システム制御部7は、ストロボ発光のための発光フラグをセットしメインコンデンサに充電を行う(S214)。
【0023】
次に、システム制御部7は、固体撮像素子3、アナログフロントエンド&TG部4を通った信号から信号処理部5で高周波成分を取り出し被写体までの距離を演算する(S216)。その後、システム制御部7はレンズ1のAFレンズを駆動して合焦か否かを判断し(S217)、合焦していないと判断したときは再びAFレンズを駆動し測距を行う。
【0024】
合焦後、システム制御部7は、レリーズスイッチの第2のスイッチがオンされるまで待機し、第2のスイッチがオンされると(S218)、ストロボの発光を行わない場合(S219で「No」)には静止画の露光を行う(S221)。発光フラグがセットされている場合(S219で「Yes」)、システム制御部7は、本露光とともに発光部12を発光させ、静止画の撮影を行う(S220)。
【0025】
本露光が終了すると、固体撮像素子3、アナログフロントエンド&TG部4を通った画像データは信号処理部5で所望の信号処理を施され、システム制御部7の制御により記録媒体9に記録される。この時第2のスイッチが押され続けていた場合は(S222で「Yes」)、システム制御部7はLCD等に画像を表示し(S223)、第2のスイッチがオフされるまで表示し続け、オフされた時には表示を止めて撮影を終了する。S218ではじめから第2のスイッチがオフだった場合は、システム制御部7は、表示は行わずに撮影を終了する。操作部11のメインスイッチがオフされていなければ(S224で「No」)、システム制御部7は、S203以降の撮影シーケンスを再度実行する。操作部11のメインスイッチがオフされれば(S224で「Yes」)、システム制御部7は、光学ブロックの各メカを所定の位置に戻し、メインの電源を切る。
【0026】
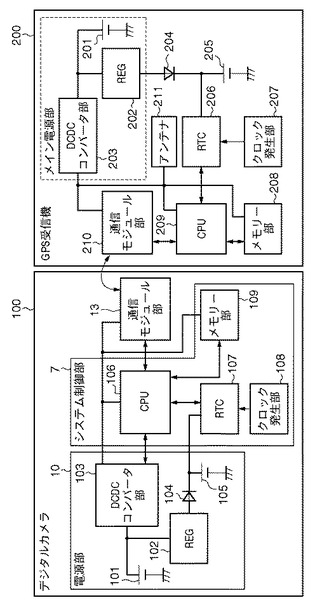
図3は、第1の実施形態に係る時刻設定に関連する、デジタルカメラ100及びGPS受信機200の構成を示すブロック図である。図3において、図1と同一又は同様の構成要素には同一の符号を付し、説明を省略する。デジタルカメラ100及びGPS受信機200は、後述する通信モジュール部13及び通信モジュール部210により、相互に通信可能である。
【0027】
メイン電池101は、デジタルカメラ100を駆動する主たる電池である。レギュレータ102は、メイン電池101から所定の電圧を生成する。DCDCコンバータ部103は、デジタルカメラ100を駆動するために必要な電圧を生成する。ダイオード104は、逆流防止用のダイオードである。バックアップ電池105は、リアルタイムクロック107を駆動するためのバックアップ電池である。CPU106は、システム制御部7に含まれ、デジタルカメラ100を制御する。
【0028】
リアルタイムクロック107は、時刻を計時するための時計である。クロック発生部108は、リアルタイムクロックへ供給するクロックを発生する。メモリー部109は、データを格納する。
【0029】
メイン電池201は、GPS受信機200を駆動する主たる電池である。レギュレータ202は、メイン電池201から所定の電圧を生成する。DCDCコンバータ部203は、GPS受信機200を駆動するために必要な電圧を生成する。ダイオード204は、逆流防止用のダイオードである。バックアップ電池205は、GPS受信機200内にあるリアルタイムクロック206を駆動する(動作させる)ための電力を供給するバックアップ電池である。
【0030】
リアルタイムクロック206は、時刻を計時するための時計である。クロック発生部207は、リアルタイムクロック206へ供給するクロックを発生する。メモリー部208は、データを格納する。CPU209は、GPS受信機200全体を制御する。CPU209はまた、後述するアンテナ211を介してGPS衛星から受信したデータに基づいて時刻情報(第1時刻情報)や位置情報などを取得する処理を行う。通信モジュール部210は、デジタルカメラ100などの外部機器と通信するためのモジュールである。アンテナ211は、GPS衛星からデータを受信する。
【0031】
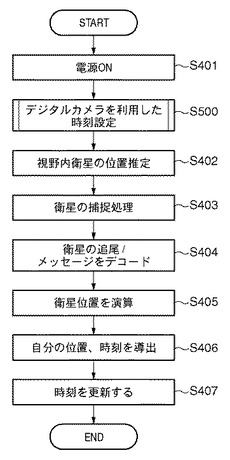
図4は、GPS受信機200の起動時の処理を示すフローチャートである。S401で、GPS受信機200の電源がオンされる。S500で、CPU209は、デジタルカメラ100を利用してリアルタイムクロック206の時刻を設定する処理を実行する(詳細は図5を参照して後述)。
【0032】
S402で、CPU209は、リアルタイムクロック206の時刻情報を基に視野内にあるGPS衛星の位置を推定するための演算を行う。S403で、CPU209は、S402における推定結果に基づいてGPS衛星を捕捉する処理を行う。S403で衛星を捕捉することができたら、CPU209は、アンテナ211を介してGPS衛星からデータ(メッセージ)を受信し、デコードする。S405で、CPU209は、GPS衛星の位置を演算する。
【0033】
S406で、CPU209(第1受信手段)は、GPSシステム(衛星航法システム)から時刻情報(第1時刻情報)を受信する。具体的には、CPU209は、各GPS衛星から必要な情報を受信し、受信した情報に基づく演算により時刻情報を導出する。また、CPU209は、自分の位置も導出する。S407で、CPU209(第1設定手段)は、リアルタイムクロック206の時刻をS406で受信(導出)した時刻情報が示す時刻に更新(設定)する。
【0034】
ところで、S402における位置推定のためには、リアルタイムクロック206の時刻情報の正確さが非常に重要なポイントとなる。CPU209は、この時刻情報を基に最初に探す衛星の位置を予測するので、時刻情報が大きくずれていると推定位置と実際の位置との誤差が大きくなってしまう。そうした場合には、S403での衛星の捕捉に非常に長い時間を要してしまう可能性が発生し、更には捕捉できない状態になってしまう可能性もある。そこで、本実施形態では、CPU209は、S500の処理によりリアルタイムクロック206の時刻を修正する。
【0035】
S500の処理の詳細な説明に先立って、リアルタイムクロック206の詳細な構成について説明する。リアルタイムクロック206の動作用電力は、通常はメイン電池201に接続されたレギュレータ202で生成された所定の電圧により、ダイオード204を介して供給される。ところが、メイン電池201が1次電池ならば消耗による交換のため、2次電池ならば充電のためGPS受信機200から取り外される可能性がある。また、GPS受信機200を暫く使用しない場合などもユーザによっては取り外したままにされる可能性がある。バックアップ電池205は、そういった場合においてもリアルタイムクロック206が動作(計時)できるように、電力を供給するためのものである。従って、メイン電池201がなく、バックアップ電池205も消耗し、その結果リアルタイムクロック206が動作するために必要な水準の電力が供給できなくなった場合には、リアルタイムクロック206は正しい時刻を計時できない。
【0036】
リアルタイムクロック206は、動作に必要な電力が電源(メイン電池201又はバックアップ電池205)から供給されない状態(電力不足状態)が発生したことを検知することができる。リアルタイムクロック206はまた、そのような電力不足状態の発生が検知されたか否かを示すフラグ情報(検知情報)を記憶する減電用レジスタを有する。リアルタイムクロック206は、電力不足状態の発生を検知すると、フラグ情報を「アクティブ」にセットする。但し、電力不足状態を検知する機構及び減電用レジスタは、リアルタイムクロック206ではなく、例えばCPU209が備えていてもよい。
【0037】
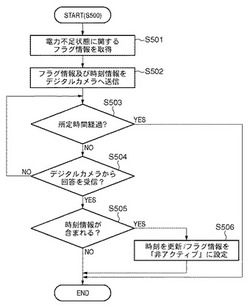
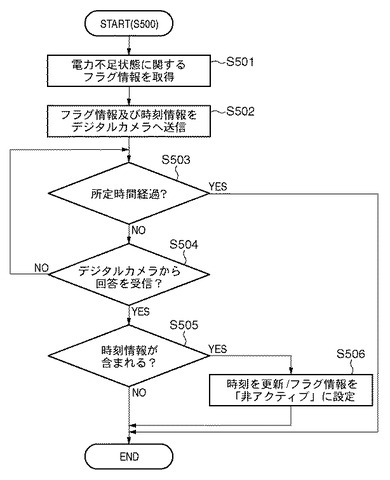
図5は、図4のS500の処理の詳細を示すフローチャートである。S501で、CPU209は、リアルタイムクロック206の減電用レジスタからフラグ情報を取得する。S502で、CPU209は、S501で取得したフラグ情報と、リアルタイムクロック206の時刻を示す時刻情報(第3時刻情報)とを、通信モジュール部210を介してデジタルカメラ100へ送信する。S503で、CPU209は、デジタルカメラ100から回答を受信するまで待機し、待機中に所定時間が経過した場合は本フローチャートの処理を終了する。この場合、デジタルカメラ100を利用した時刻の設定は行われない。
【0038】
CPU209(第2受信手段)がデジタルカメラ100から回答を受信した場合、処理はS504からS505へ進む。S505で、CPU209は、S502における送信に対する回答に時刻情報(第2時刻情報)が含まれるか否かを判定する。この時刻情報は、デジタルカメラ100のリアルタイムクロック107の時刻情報である。回答に時刻情報が含まれない場合、本フローチャートの処理は終了する。この場合、デジタルカメラ100を利用した時刻の設定は行われない。回答に時刻情報が含まれる場合、処理はS506に進む。S506で、CPU209(第2設定手段)は、リアルタイムクロック206の時刻を受信した時刻情報が示す時刻に設定(更新)する。また、CPU209は、リアルタイムクロック206の減電用レジスタのフラグ情報を「非アクティブ」に設定する。
【0039】
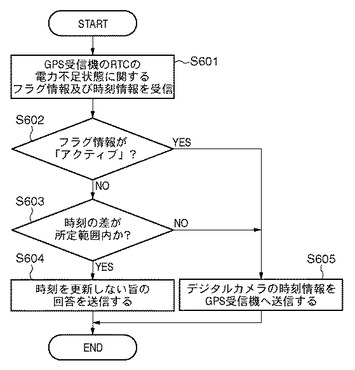
図6は、第1の実施形態に係る、デジタルカメラ100が時刻情報を送信する処理を示すフローチャートである。S601で、CPU106は通信モジュール部13を介して、S502でGPS受信機200が送信したフラグ情報及び時刻情報(第3時刻情報)を受信する。S602で、CPU106は、フラグ情報が「アクティブ」に設定されているか否かを判定する。フラグ情報が「アクティブ」に設定されている場合、処理はS605に進み、そうでない場合、処理はS603に進む。
【0040】
S603で、CPU106は、S602で受信した時刻情報が示す時刻とリアルタイムクロック107の時刻との差が所定の範囲内であるか否かを判定する。差が所定の範囲内である場合、処理はS604に進み、そうでない場合、処理はS605に進む。
【0041】
S604で、CPU106は通信モジュール部13を介して、リアルタイムクロック206の時刻を更新する必要がないという旨の回答をGPS受信機200へ送信する。或いは、CPU106は、何の回答も送信しなくてもよい。S605で、CPU106は通信モジュール部13を介して、リアルタイムクロック107の時刻情報(第2時刻情報)をGPS受信機200へ送信する。
【0042】
S602においてフラグ情報が「アクティブ」に設定されている場合とは、リアルタイムクロック206が動作できない水準にまで電力が低下した場合(電力不足状態が検出された場合)である。この場合、リアルタイムクロック206の時刻情報はリセットされて初期状態となっている。従って時刻情報は本来の時刻を示していないため、デジタルカメラ100内のリアルタイムクロック107の時刻情報を用いて更新することが有益である。
【0043】
また、S603でリアルタイムクロック107及びリアルタイムクロック206の時刻の差が所定の範囲内に入っているか否かを判定する理由を述べる。一般的に、GPS受信機は、衛星を捕捉し時刻を演算して求めることにより正確な時刻を知ることができる。つまり、衛星を捕捉することさえできれば正確な時刻を求めることができるということから、GPS受信機の計時用のデバイス(リアルタイムクロック206)として精度の低いものが使用される場合がある。そういった場合、一定期間衛星を捕捉しない状態が続くと、電池の消耗による時刻情報のリセットが発生しなくても、正確な時刻から大幅にずれている可能性がある。そのため、時刻の差が所定の範囲内でない場合に、デジタルカメラ100のリアルタイムクロック107の時刻情報を用いてGPS受信機200のリアルタイムクロック206の時刻を更新することは有益である。
【0044】
以上説明したように、本実施形態によれば、GPS受信機200は、電池の消耗などが原因でリアルタイムクロック206に供給される電力が不足した場合に、デジタルカメラ100から時刻情報を取得する。そして、GPS受信機200は、リアルタイムクロック206の時刻を取得した時刻情報が示す時刻に設定する。
【0045】
このように、本実施形態によれば、衛星航法システム受信機の時計の時刻を衛星航法システムに頼らずに設定することが可能になる。また、GPS受信機200が時刻設定のための操作部材等を備えなくても、デジタルカメラ100を介してGPS受信機200の時刻を設定することができるため、GPS受信機200の操作部材を削減してコストを削減することもできる。
【0046】
[第2の実施形態]
第2の実施形態では、デジタルカメラ100は、時刻情報をGPS受信機200へ送信するか否かをユーザが選択可能なように構成される。本実施形態において、デジタルカメラ100及びGPS受信機200の基本的な構成及び動作は、図6の処理を除いて第1の実施形態と同様であるため、説明を省略する(図1乃至図5参照)。
【0047】
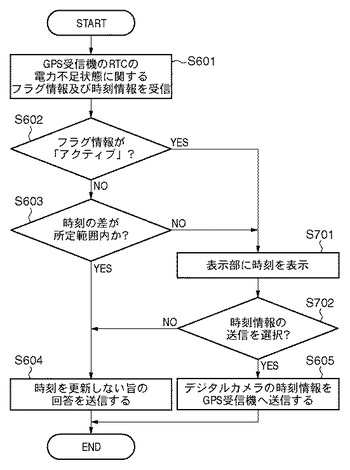
図7は、第2の実施形態に係る、デジタルカメラ100が時刻情報を送信する処理を示すフローチャートである。図7において、図6と同一又は同様の処理が行われるステップには同一の符号を付し、説明を省略する。第2の実施形態では、S602においてフラグ情報が「アクティブ」に設定されていると判定された場合、又は、S603において時刻の差が所定の範囲内でないと判定された場合に、処理はS701に進む。
【0048】
S701で、CPU106は、S601においてGPS受信機200から受信した時刻情報が示す時刻を、表示部8に表示する。CPU106はまた、リアルタイムクロック107の時刻も表示部8に表示する。S702で、CPU106(制御手段)は、表示部8及び操作部11を介して、リアルタイムクロック107の時刻情報をGPS受信機200へ送信するか否かをユーザに選択させる。時刻情報を送信することが選択された場合、処理は、S605に進む。時刻情報を送信しないことが選択された場合、処理はS604に進む(即ち、CPU106は、時刻情報を送信しない制御を行う)。
【0049】
第2の実施形態の構成は、例えば次のような場合に有益である。ユーザがデジタルカメラ100の時刻を意図的に変更していたり、国外へ旅行中であったり、国外の旅行から戻った場合において時刻の変更を忘れていた場合などを考える。この場合、ユーザは時刻情報を送信しないことを選択することにより、GPS受信機200のリアルタイムクロック206を意図しない時刻に設定してしまうことを回避できる。
【0050】
[その他の実施形態]
また、本発明は、以下の処理を実行することによっても実現される。即ち、上述した実施形態の機能を実現するソフトウェア(プログラム)を、ネットワーク又は各種記憶媒体を介してシステム或いは装置に供給し、そのシステム或いは装置のコンピュータ(またはCPUやMPU等)がプログラムを読み出して実行する処理である。
【技術分野】
【0001】
本発明は、衛星航法システム受信機、その制御方法、電子デバイス、及びその制御方法に関する。
【背景技術】
【0002】
衛星航法システム受信機、例えばGPS受信機を備えているデバイス(GPSデバイス)は、GPS衛星を利用した測位を行うことにより正確な位置情報及び時刻情報を得ることができる。GPSデバイスは、得られた正確な時刻情報を用いて、自身が持つ時計の時刻のずれを演算し、自身の時計の時刻情報を補正することができる。GPSデバイスは、得られた時刻情報などのデータをバックアップし、電源投入時におけるGPS衛星の位置予測に利用している。
【0003】
一方GPS受信機を備えていない電子デバイスは、GPSデバイスと通信を行うことにより、正確な時刻情報をGPSデバイスから取得して自身の時計の時刻情報を更新することができる。
【0004】
例えば、特許文献1によれば、デジタルカメラは、クレードル内にあるGPS部で得られた正確な時刻情報をクレードルから得ることより、デジタルカメラ内の時刻情報を更新する。特許文献1は、GPS部を備えるクレードルが正確な時刻情報を得た後の動作を説明しており、また、時刻情報は、GPS部を備えるクレードルからデジタルカメラへの一方向だけに通信される。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特許第4027104号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
従来のGPSデバイスは、時計の時刻が何らかの原因で大きくずれてしまった場合、GPS衛星から時刻情報を取得するまでは他に時刻を自動更新する手段を持たない。例えば、GPSデバイスは一般的に、電源オフ時にも時刻をカウントするために、リアルタイムクロックを有している。このリアルタイムクロックはバックアップ電池により動作するが、バックアップ電池が消耗してリアルタイムクロックの動作可能電圧以下まで垂下した場合には、時刻情報はリセットされてしまう。そのため、このような状態になってしまうと時刻情報を自動更新する手段がないため、GPSデバイスのリアルタイムクロックによる時刻情報は正確な時刻から大きくずれたままになってしまう。
【0007】
前述の通り、GPS受信機は一般的に、電源投入時には自身の時計の時刻情報を利用して最初に探すGPS衛星の位置を予測してから測位を開始する。そのため、時刻情報が大きくずれている場合にはGPS衛星の予測位置も大きくずれることになるので、電源投入から測位を開始するまでの時間が非常に長くなり、場合によっては、まったく測位を開始できなくなってしまうこともあった。
【0008】
本発明はこのような状況に鑑みてなされたものであり、衛星航法システム受信機の時計の時刻を衛星航法システムに頼らずに設定する技術を提供することを目的とする。
【課題を解決するための手段】
【0009】
上記課題を解決するために、第1の本発明は、電子デバイスと通信可能であり、電源から供給される電力で動作する時計を備える衛星航法システム受信機であって、衛星航法システムから第1時刻情報を受信する第1受信手段と、前記時計の時刻を前記第1時刻情報が示す時刻に設定する第1設定手段と、前記時計の動作に必要な電力が前記時計に供給されない電力不足状態の発生を検知する検知手段と、前記電力不足状態の発生が検知されたか否かを示す検知情報を記憶する記憶手段と、前記検知情報を前記電子デバイスへ送信する送信手段と、前記検知情報の送信に応えて前記電子デバイスから送信された第2時刻情報を受信する第2受信手段と、前記時計の時刻を前記第2時刻情報が示す時刻に設定する第2設定手段と、を備えることを特徴とする衛星航法システム受信機を提供する。
【0010】
なお、その他の本発明の特徴は、添付図面及び以下の発明を実施するための形態における記載によって更に明らかになるものである。
【発明の効果】
【0011】
以上の構成により、本発明によれば、衛星航法システム受信機の時計の時刻を衛星航法システムに頼らずに設定することが可能となる。
【図面の簡単な説明】
【0012】
【図1】第1の実施形態に係るデジタルカメラ100の構成を示すブロック図
【図2】デジタルカメラ100の基本動作を示すフローチャート
【図3】第1の実施形態に係る時刻設定に関連する、デジタルカメラ100及びGPS受信機200の構成を示すブロック図
【図4】GPS受信機200の起動時の処理を示すフローチャート
【図5】図4のS500の処理の詳細を示すフローチャート
【図6】第1の実施形態に係る、デジタルカメラ100が時刻情報を送信する処理を示すフローチャート
【図7】第2の実施形態に係る、デジタルカメラ100が時刻情報を送信する処理を示すフローチャート
【発明を実施するための形態】
【0013】
以下、添付図面を参照して、本発明の実施形態を説明する。なお、本発明の技術的範囲は、特許請求の範囲によって確定されるのであって、以下の個別の実施形態によって限定されるわけではない。また、実施形態の中で説明されている特徴の組み合わせすべてが、本発明に必須とは限らない。
【0014】
以下の各実施形態では、本発明の衛星航法システム受信機及び電子デバイスの例としてGPS受信機及びデジタルカメラを用いるが、本発明はこれに限定されない。例えば、本発明の衛星航法システム受信機はGLONASS受信機であってもよいし、本発明の電子デバイスはラップトップコンピュータであってもよい。
【0015】
[第1の実施形態]
図1は、第1の実施形態に係るデジタルカメラ100の構成を示すブロック図である。レンズ1は、被写体の光学像を固体撮像素子3に結像させる。絞り・シャッター2は、シャッター機能を有し、レンズ1を通る光量を制御するための絞りを兼ねる。固体撮像素子3は、レンズ1で結像された被写体光を電気信号に変換する。
【0016】
アナログフロントエンド&TG部4は、固体撮像素子3や、後述するCDS回路、クランプ回路、及びA/D変換回路のために必要なパルスを発生するタイミングパルス発生回路を含む。アナログフロントエンド&TG部4はまた、固体撮像素子3より出力される電気信号のクロックの除去やノイズの軽減のための相関二重サンプリングを行うCDS回路を含む。アナログフロントエンド&TG部4は更に、所定の基準電圧にクランプするクランプ回路、及びアナログ信号からデジタル信号に変換するA/D変換回路を含む。
【0017】
信号処理部5は、表示や記録などをするために所望の形式となるように種々の信号処理や変換を行う。光学系駆動部6は、レンズ1や絞り・シャッター2を駆動する。システム制御部7は、デジタルカメラ100全体の制御及び各種演算を行う。表示部8は、信号処理部5からの信号を受けLCD等に表示する。記録媒体9は、画像データの記録及び読み出しを行うための、例えば半導体メモリー等を含む。電源部10は、デジタルカメラ100のすべてのブロックに電源を供給する。操作部11は、デジタルカメラ100の電源をオン/オフしたり、モードの切り替えや選択などの操作を行ったりするための操作部である。発光部12は、例えばストロボである。通信モジュール部13は、GPS受信機などの外部デバイスとの通信を行うためのモジュールである。
【0018】
次に、デジタルカメラ100の基本動作を図2のフローチャートを用いて簡単に説明する。デジタルカメラ100の操作部11のメインスイッチがオンされると(S201)、電源部10は動作を開始し、メイン電源及びコントロール系の電源を供給する。システム制御部7は、モードが撮影モードであるか再生モードであるかを判断し(S202)、撮影モードであればS203以降の撮影シーケンスに入り、再生モードであった場合はS231以降の再生シーケンスに入る。
【0019】
再生シーケンスにおいて、システム制御部7は、記録媒体9からデータを一旦信号処理部5に取り込み(S231)、表示のための信号処理を行い、LCD等に画像を表示する(S232)。その後、システム制御部7は、操作部11のメインスイッチがオフされるまで画像を表示し、操作部11のメインスイッチがオフされたら(S233で「Yes」)画像の表示を中止し電源をオフする。
【0020】
撮影シーケンスにおいて、システム制御部7は、レンズ1のAFレンズのレンズ位置をリセット位置まで駆動し(S203)、固体撮像素子3やアナログフロントエンド&TG部4など撮像系回路の電源をオンする。システム制御部7は、光学系駆動部6を制御することにより絞り・シャッター2を開放する(S204)。その後、測光のために、固体撮像素子3を通った信号をアナログフロントエンド&TG部4のCDS回路で相関二重サンプリングし、クランプ回路でOB部をクランプし、A/D変換回路でA/D変換を行い、その変換された画像データを信号処理部5で処理する。更に、システム制御部7は信号処理部5から入力された画像データに基づいて露出制御値を演算する(S205)。この演算結果に応じて、システム制御部7はプログラム線図により、絞り、シャッタースピードを決定して制御する(S206)。
【0021】
その後、システム制御部7は、ストロボのモードを確認し(S207)、ストロボのモードがオフでなければメインコンデンサに充電を行う(S208)。システム制御部7は、表示モードを確認し(S209)、表示ONのモードであればLCD等の表示を行い(S210)、そうでない場合はレリーズスイッチの第1のスイッチがオンされるまで待機する。
【0022】
第1のスイッチがオンされると(S211)、S205と同様に露出制御値の演算が行われる(S212)。その結果に応じて、システム制御部7は再度プログラム線図により、絞り、シャッタースピードを決定して制御する(S215)。但し、S215の処理に先立って、S212の測光の結果としてストロボ等の補助光が必要なくらい暗いか否か、また、ストロボ発光モードがオンとなっているか否かが判定される(S213)。いずれかの判定結果がYesであれば、システム制御部7は、ストロボ発光のための発光フラグをセットしメインコンデンサに充電を行う(S214)。
【0023】
次に、システム制御部7は、固体撮像素子3、アナログフロントエンド&TG部4を通った信号から信号処理部5で高周波成分を取り出し被写体までの距離を演算する(S216)。その後、システム制御部7はレンズ1のAFレンズを駆動して合焦か否かを判断し(S217)、合焦していないと判断したときは再びAFレンズを駆動し測距を行う。
【0024】
合焦後、システム制御部7は、レリーズスイッチの第2のスイッチがオンされるまで待機し、第2のスイッチがオンされると(S218)、ストロボの発光を行わない場合(S219で「No」)には静止画の露光を行う(S221)。発光フラグがセットされている場合(S219で「Yes」)、システム制御部7は、本露光とともに発光部12を発光させ、静止画の撮影を行う(S220)。
【0025】
本露光が終了すると、固体撮像素子3、アナログフロントエンド&TG部4を通った画像データは信号処理部5で所望の信号処理を施され、システム制御部7の制御により記録媒体9に記録される。この時第2のスイッチが押され続けていた場合は(S222で「Yes」)、システム制御部7はLCD等に画像を表示し(S223)、第2のスイッチがオフされるまで表示し続け、オフされた時には表示を止めて撮影を終了する。S218ではじめから第2のスイッチがオフだった場合は、システム制御部7は、表示は行わずに撮影を終了する。操作部11のメインスイッチがオフされていなければ(S224で「No」)、システム制御部7は、S203以降の撮影シーケンスを再度実行する。操作部11のメインスイッチがオフされれば(S224で「Yes」)、システム制御部7は、光学ブロックの各メカを所定の位置に戻し、メインの電源を切る。
【0026】
図3は、第1の実施形態に係る時刻設定に関連する、デジタルカメラ100及びGPS受信機200の構成を示すブロック図である。図3において、図1と同一又は同様の構成要素には同一の符号を付し、説明を省略する。デジタルカメラ100及びGPS受信機200は、後述する通信モジュール部13及び通信モジュール部210により、相互に通信可能である。
【0027】
メイン電池101は、デジタルカメラ100を駆動する主たる電池である。レギュレータ102は、メイン電池101から所定の電圧を生成する。DCDCコンバータ部103は、デジタルカメラ100を駆動するために必要な電圧を生成する。ダイオード104は、逆流防止用のダイオードである。バックアップ電池105は、リアルタイムクロック107を駆動するためのバックアップ電池である。CPU106は、システム制御部7に含まれ、デジタルカメラ100を制御する。
【0028】
リアルタイムクロック107は、時刻を計時するための時計である。クロック発生部108は、リアルタイムクロックへ供給するクロックを発生する。メモリー部109は、データを格納する。
【0029】
メイン電池201は、GPS受信機200を駆動する主たる電池である。レギュレータ202は、メイン電池201から所定の電圧を生成する。DCDCコンバータ部203は、GPS受信機200を駆動するために必要な電圧を生成する。ダイオード204は、逆流防止用のダイオードである。バックアップ電池205は、GPS受信機200内にあるリアルタイムクロック206を駆動する(動作させる)ための電力を供給するバックアップ電池である。
【0030】
リアルタイムクロック206は、時刻を計時するための時計である。クロック発生部207は、リアルタイムクロック206へ供給するクロックを発生する。メモリー部208は、データを格納する。CPU209は、GPS受信機200全体を制御する。CPU209はまた、後述するアンテナ211を介してGPS衛星から受信したデータに基づいて時刻情報(第1時刻情報)や位置情報などを取得する処理を行う。通信モジュール部210は、デジタルカメラ100などの外部機器と通信するためのモジュールである。アンテナ211は、GPS衛星からデータを受信する。
【0031】
図4は、GPS受信機200の起動時の処理を示すフローチャートである。S401で、GPS受信機200の電源がオンされる。S500で、CPU209は、デジタルカメラ100を利用してリアルタイムクロック206の時刻を設定する処理を実行する(詳細は図5を参照して後述)。
【0032】
S402で、CPU209は、リアルタイムクロック206の時刻情報を基に視野内にあるGPS衛星の位置を推定するための演算を行う。S403で、CPU209は、S402における推定結果に基づいてGPS衛星を捕捉する処理を行う。S403で衛星を捕捉することができたら、CPU209は、アンテナ211を介してGPS衛星からデータ(メッセージ)を受信し、デコードする。S405で、CPU209は、GPS衛星の位置を演算する。
【0033】
S406で、CPU209(第1受信手段)は、GPSシステム(衛星航法システム)から時刻情報(第1時刻情報)を受信する。具体的には、CPU209は、各GPS衛星から必要な情報を受信し、受信した情報に基づく演算により時刻情報を導出する。また、CPU209は、自分の位置も導出する。S407で、CPU209(第1設定手段)は、リアルタイムクロック206の時刻をS406で受信(導出)した時刻情報が示す時刻に更新(設定)する。
【0034】
ところで、S402における位置推定のためには、リアルタイムクロック206の時刻情報の正確さが非常に重要なポイントとなる。CPU209は、この時刻情報を基に最初に探す衛星の位置を予測するので、時刻情報が大きくずれていると推定位置と実際の位置との誤差が大きくなってしまう。そうした場合には、S403での衛星の捕捉に非常に長い時間を要してしまう可能性が発生し、更には捕捉できない状態になってしまう可能性もある。そこで、本実施形態では、CPU209は、S500の処理によりリアルタイムクロック206の時刻を修正する。
【0035】
S500の処理の詳細な説明に先立って、リアルタイムクロック206の詳細な構成について説明する。リアルタイムクロック206の動作用電力は、通常はメイン電池201に接続されたレギュレータ202で生成された所定の電圧により、ダイオード204を介して供給される。ところが、メイン電池201が1次電池ならば消耗による交換のため、2次電池ならば充電のためGPS受信機200から取り外される可能性がある。また、GPS受信機200を暫く使用しない場合などもユーザによっては取り外したままにされる可能性がある。バックアップ電池205は、そういった場合においてもリアルタイムクロック206が動作(計時)できるように、電力を供給するためのものである。従って、メイン電池201がなく、バックアップ電池205も消耗し、その結果リアルタイムクロック206が動作するために必要な水準の電力が供給できなくなった場合には、リアルタイムクロック206は正しい時刻を計時できない。
【0036】
リアルタイムクロック206は、動作に必要な電力が電源(メイン電池201又はバックアップ電池205)から供給されない状態(電力不足状態)が発生したことを検知することができる。リアルタイムクロック206はまた、そのような電力不足状態の発生が検知されたか否かを示すフラグ情報(検知情報)を記憶する減電用レジスタを有する。リアルタイムクロック206は、電力不足状態の発生を検知すると、フラグ情報を「アクティブ」にセットする。但し、電力不足状態を検知する機構及び減電用レジスタは、リアルタイムクロック206ではなく、例えばCPU209が備えていてもよい。
【0037】
図5は、図4のS500の処理の詳細を示すフローチャートである。S501で、CPU209は、リアルタイムクロック206の減電用レジスタからフラグ情報を取得する。S502で、CPU209は、S501で取得したフラグ情報と、リアルタイムクロック206の時刻を示す時刻情報(第3時刻情報)とを、通信モジュール部210を介してデジタルカメラ100へ送信する。S503で、CPU209は、デジタルカメラ100から回答を受信するまで待機し、待機中に所定時間が経過した場合は本フローチャートの処理を終了する。この場合、デジタルカメラ100を利用した時刻の設定は行われない。
【0038】
CPU209(第2受信手段)がデジタルカメラ100から回答を受信した場合、処理はS504からS505へ進む。S505で、CPU209は、S502における送信に対する回答に時刻情報(第2時刻情報)が含まれるか否かを判定する。この時刻情報は、デジタルカメラ100のリアルタイムクロック107の時刻情報である。回答に時刻情報が含まれない場合、本フローチャートの処理は終了する。この場合、デジタルカメラ100を利用した時刻の設定は行われない。回答に時刻情報が含まれる場合、処理はS506に進む。S506で、CPU209(第2設定手段)は、リアルタイムクロック206の時刻を受信した時刻情報が示す時刻に設定(更新)する。また、CPU209は、リアルタイムクロック206の減電用レジスタのフラグ情報を「非アクティブ」に設定する。
【0039】
図6は、第1の実施形態に係る、デジタルカメラ100が時刻情報を送信する処理を示すフローチャートである。S601で、CPU106は通信モジュール部13を介して、S502でGPS受信機200が送信したフラグ情報及び時刻情報(第3時刻情報)を受信する。S602で、CPU106は、フラグ情報が「アクティブ」に設定されているか否かを判定する。フラグ情報が「アクティブ」に設定されている場合、処理はS605に進み、そうでない場合、処理はS603に進む。
【0040】
S603で、CPU106は、S602で受信した時刻情報が示す時刻とリアルタイムクロック107の時刻との差が所定の範囲内であるか否かを判定する。差が所定の範囲内である場合、処理はS604に進み、そうでない場合、処理はS605に進む。
【0041】
S604で、CPU106は通信モジュール部13を介して、リアルタイムクロック206の時刻を更新する必要がないという旨の回答をGPS受信機200へ送信する。或いは、CPU106は、何の回答も送信しなくてもよい。S605で、CPU106は通信モジュール部13を介して、リアルタイムクロック107の時刻情報(第2時刻情報)をGPS受信機200へ送信する。
【0042】
S602においてフラグ情報が「アクティブ」に設定されている場合とは、リアルタイムクロック206が動作できない水準にまで電力が低下した場合(電力不足状態が検出された場合)である。この場合、リアルタイムクロック206の時刻情報はリセットされて初期状態となっている。従って時刻情報は本来の時刻を示していないため、デジタルカメラ100内のリアルタイムクロック107の時刻情報を用いて更新することが有益である。
【0043】
また、S603でリアルタイムクロック107及びリアルタイムクロック206の時刻の差が所定の範囲内に入っているか否かを判定する理由を述べる。一般的に、GPS受信機は、衛星を捕捉し時刻を演算して求めることにより正確な時刻を知ることができる。つまり、衛星を捕捉することさえできれば正確な時刻を求めることができるということから、GPS受信機の計時用のデバイス(リアルタイムクロック206)として精度の低いものが使用される場合がある。そういった場合、一定期間衛星を捕捉しない状態が続くと、電池の消耗による時刻情報のリセットが発生しなくても、正確な時刻から大幅にずれている可能性がある。そのため、時刻の差が所定の範囲内でない場合に、デジタルカメラ100のリアルタイムクロック107の時刻情報を用いてGPS受信機200のリアルタイムクロック206の時刻を更新することは有益である。
【0044】
以上説明したように、本実施形態によれば、GPS受信機200は、電池の消耗などが原因でリアルタイムクロック206に供給される電力が不足した場合に、デジタルカメラ100から時刻情報を取得する。そして、GPS受信機200は、リアルタイムクロック206の時刻を取得した時刻情報が示す時刻に設定する。
【0045】
このように、本実施形態によれば、衛星航法システム受信機の時計の時刻を衛星航法システムに頼らずに設定することが可能になる。また、GPS受信機200が時刻設定のための操作部材等を備えなくても、デジタルカメラ100を介してGPS受信機200の時刻を設定することができるため、GPS受信機200の操作部材を削減してコストを削減することもできる。
【0046】
[第2の実施形態]
第2の実施形態では、デジタルカメラ100は、時刻情報をGPS受信機200へ送信するか否かをユーザが選択可能なように構成される。本実施形態において、デジタルカメラ100及びGPS受信機200の基本的な構成及び動作は、図6の処理を除いて第1の実施形態と同様であるため、説明を省略する(図1乃至図5参照)。
【0047】
図7は、第2の実施形態に係る、デジタルカメラ100が時刻情報を送信する処理を示すフローチャートである。図7において、図6と同一又は同様の処理が行われるステップには同一の符号を付し、説明を省略する。第2の実施形態では、S602においてフラグ情報が「アクティブ」に設定されていると判定された場合、又は、S603において時刻の差が所定の範囲内でないと判定された場合に、処理はS701に進む。
【0048】
S701で、CPU106は、S601においてGPS受信機200から受信した時刻情報が示す時刻を、表示部8に表示する。CPU106はまた、リアルタイムクロック107の時刻も表示部8に表示する。S702で、CPU106(制御手段)は、表示部8及び操作部11を介して、リアルタイムクロック107の時刻情報をGPS受信機200へ送信するか否かをユーザに選択させる。時刻情報を送信することが選択された場合、処理は、S605に進む。時刻情報を送信しないことが選択された場合、処理はS604に進む(即ち、CPU106は、時刻情報を送信しない制御を行う)。
【0049】
第2の実施形態の構成は、例えば次のような場合に有益である。ユーザがデジタルカメラ100の時刻を意図的に変更していたり、国外へ旅行中であったり、国外の旅行から戻った場合において時刻の変更を忘れていた場合などを考える。この場合、ユーザは時刻情報を送信しないことを選択することにより、GPS受信機200のリアルタイムクロック206を意図しない時刻に設定してしまうことを回避できる。
【0050】
[その他の実施形態]
また、本発明は、以下の処理を実行することによっても実現される。即ち、上述した実施形態の機能を実現するソフトウェア(プログラム)を、ネットワーク又は各種記憶媒体を介してシステム或いは装置に供給し、そのシステム或いは装置のコンピュータ(またはCPUやMPU等)がプログラムを読み出して実行する処理である。
【特許請求の範囲】
【請求項1】
電子デバイスと通信可能であり、電源から供給される電力で動作する時計を備える衛星航法システム受信機であって、
衛星航法システムから第1時刻情報を受信する第1受信手段と、
前記時計の時刻を前記第1時刻情報が示す時刻に設定する第1設定手段と、
前記時計の動作に必要な電力が前記時計に供給されない電力不足状態の発生を検知する検知手段と、
前記電力不足状態の発生が検知されたか否かを示す検知情報を記憶する記憶手段と、
前記検知情報を前記電子デバイスへ送信する送信手段と、
前記検知情報の送信に応えて前記電子デバイスから送信された第2時刻情報を受信する第2受信手段と、
前記時計の時刻を前記第2時刻情報が示す時刻に設定する第2設定手段と、
を備えることを特徴とする衛星航法システム受信機。
【請求項2】
前記送信手段は更に、前記時計の時刻を示す第3時刻情報を前記電子デバイスへ送信し、
前記第2受信手段は、前記検知情報及び前記第3時刻情報の送信に応えて前記電子デバイスから送信された前記第2時刻情報を受信する
ことを特徴とする請求項1に記載の衛星航法システム受信機。
【請求項3】
前記時計が、前記検知手段及び前記記憶手段を備える
ことを特徴とする請求項1又は2に記載の衛星航法システム受信機。
【請求項4】
衛星航法システム受信機と通信可能であり、時計を備える電子デバイスであって、
前記衛星航法システム受信機の時計の動作に必要な電力が当該時計に供給されない電力不足状態の発生が前記衛星航法システム受信機において検知されたか否かを示す検知情報を、前記衛星航法システム受信機から受信する受信手段と、
前記電力不足状態の発生が前記衛星航法システム受信機において検知されたということを前記検知情報が示す場合に、前記電子デバイスの前記時計の時刻を示す第2時刻情報を前記衛星航法システム受信機へ送信する送信手段と、
を備えることを特徴とする電子デバイス。
【請求項5】
前記受信手段は更に、前記衛星航法システム受信機の前記時計の時刻を示す第3時刻情報を前記衛星航法システム受信機から受信し、
前記送信手段は、前記電子デバイスの前記時計の時刻と前記第3時刻情報が示す時刻との差が所定の範囲内でない場合にも、前記第2時刻情報を前記衛星航法システム受信機へ送信する
ことを特徴とする請求項4に記載の電子デバイス。
【請求項6】
前記送信手段が前記第2時刻情報を前記衛星航法システム受信機へ送信する前に、前記第2時刻情報を送信するか否かをユーザに選択させる制御手段を更に備え、
前記制御手段は、前記第2時刻情報を送信しないことが前記ユーザにより選択された場合、前記第2時刻情報を送信しないように前記送信手段を制御する
ことを特徴とする請求項4又は5に記載の電子デバイス。
【請求項7】
電子デバイスと通信可能であり、電源から供給される電力で動作する時計を備える衛星航法システム受信機の制御方法であって、
前記衛星航法システム受信機の第1受信手段が、衛星航法システムから第1時刻情報を受信する第1受信工程と、
前記衛星航法システム受信機の第1設定手段が、前記時計の時刻を前記第1時刻情報が示す時刻に設定する第1設定工程と、
前記衛星航法システム受信機の検知手段が、前記時計の動作に必要な電力が前記時計に供給されない電力不足状態の発生を検知する検知工程と、
前記衛星航法システム受信機の記憶手段が、前記電力不足状態の発生が検知されたか否かを示す検知情報を記憶する記憶工程と、
前記衛星航法システム受信機の送信手段が、前記検知情報を前記電子デバイスへ送信する送信工程と、
前記衛星航法システム受信機の第2受信手段が、前記検知情報の送信に応えて前記電子デバイスから送信された第2時刻情報を受信する第2受信工程と、
前記衛星航法システム受信機の第2設定手段が、前記時計の時刻を前記第2時刻情報が示す時刻に設定する第2設定工程と、
を備えることを特徴とする衛星航法システム受信機の制御方法。
【請求項8】
衛星航法システム受信機と通信可能であり、時計を備える電子デバイスの制御方法であって、
前記電子デバイスの受信手段が、前記衛星航法システム受信機の時計の動作に必要な電力が当該時計に供給されない電力不足状態の発生が前記衛星航法システム受信機において検知されたか否かを示す検知情報を、前記衛星航法システム受信機から受信する受信工程と、
前記電子デバイスの送信手段が、前記電力不足状態の発生が前記衛星航法システム受信機において検知されたということを前記検知情報が示す場合に、前記電子デバイスの前記時計の時刻を示す第2時刻情報を前記衛星航法システム受信機へ送信する送信工程と、
を備えることを特徴とする電子デバイスの制御方法。
【請求項9】
コンピュータに、請求項7に記載の衛星航法システム受信機の制御方法の各工程を実行させるためのプログラム。
【請求項10】
コンピュータに、請求項8に記載の電子デバイスの制御方法の各工程を実行させるためのプログラム。
【請求項1】
電子デバイスと通信可能であり、電源から供給される電力で動作する時計を備える衛星航法システム受信機であって、
衛星航法システムから第1時刻情報を受信する第1受信手段と、
前記時計の時刻を前記第1時刻情報が示す時刻に設定する第1設定手段と、
前記時計の動作に必要な電力が前記時計に供給されない電力不足状態の発生を検知する検知手段と、
前記電力不足状態の発生が検知されたか否かを示す検知情報を記憶する記憶手段と、
前記検知情報を前記電子デバイスへ送信する送信手段と、
前記検知情報の送信に応えて前記電子デバイスから送信された第2時刻情報を受信する第2受信手段と、
前記時計の時刻を前記第2時刻情報が示す時刻に設定する第2設定手段と、
を備えることを特徴とする衛星航法システム受信機。
【請求項2】
前記送信手段は更に、前記時計の時刻を示す第3時刻情報を前記電子デバイスへ送信し、
前記第2受信手段は、前記検知情報及び前記第3時刻情報の送信に応えて前記電子デバイスから送信された前記第2時刻情報を受信する
ことを特徴とする請求項1に記載の衛星航法システム受信機。
【請求項3】
前記時計が、前記検知手段及び前記記憶手段を備える
ことを特徴とする請求項1又は2に記載の衛星航法システム受信機。
【請求項4】
衛星航法システム受信機と通信可能であり、時計を備える電子デバイスであって、
前記衛星航法システム受信機の時計の動作に必要な電力が当該時計に供給されない電力不足状態の発生が前記衛星航法システム受信機において検知されたか否かを示す検知情報を、前記衛星航法システム受信機から受信する受信手段と、
前記電力不足状態の発生が前記衛星航法システム受信機において検知されたということを前記検知情報が示す場合に、前記電子デバイスの前記時計の時刻を示す第2時刻情報を前記衛星航法システム受信機へ送信する送信手段と、
を備えることを特徴とする電子デバイス。
【請求項5】
前記受信手段は更に、前記衛星航法システム受信機の前記時計の時刻を示す第3時刻情報を前記衛星航法システム受信機から受信し、
前記送信手段は、前記電子デバイスの前記時計の時刻と前記第3時刻情報が示す時刻との差が所定の範囲内でない場合にも、前記第2時刻情報を前記衛星航法システム受信機へ送信する
ことを特徴とする請求項4に記載の電子デバイス。
【請求項6】
前記送信手段が前記第2時刻情報を前記衛星航法システム受信機へ送信する前に、前記第2時刻情報を送信するか否かをユーザに選択させる制御手段を更に備え、
前記制御手段は、前記第2時刻情報を送信しないことが前記ユーザにより選択された場合、前記第2時刻情報を送信しないように前記送信手段を制御する
ことを特徴とする請求項4又は5に記載の電子デバイス。
【請求項7】
電子デバイスと通信可能であり、電源から供給される電力で動作する時計を備える衛星航法システム受信機の制御方法であって、
前記衛星航法システム受信機の第1受信手段が、衛星航法システムから第1時刻情報を受信する第1受信工程と、
前記衛星航法システム受信機の第1設定手段が、前記時計の時刻を前記第1時刻情報が示す時刻に設定する第1設定工程と、
前記衛星航法システム受信機の検知手段が、前記時計の動作に必要な電力が前記時計に供給されない電力不足状態の発生を検知する検知工程と、
前記衛星航法システム受信機の記憶手段が、前記電力不足状態の発生が検知されたか否かを示す検知情報を記憶する記憶工程と、
前記衛星航法システム受信機の送信手段が、前記検知情報を前記電子デバイスへ送信する送信工程と、
前記衛星航法システム受信機の第2受信手段が、前記検知情報の送信に応えて前記電子デバイスから送信された第2時刻情報を受信する第2受信工程と、
前記衛星航法システム受信機の第2設定手段が、前記時計の時刻を前記第2時刻情報が示す時刻に設定する第2設定工程と、
を備えることを特徴とする衛星航法システム受信機の制御方法。
【請求項8】
衛星航法システム受信機と通信可能であり、時計を備える電子デバイスの制御方法であって、
前記電子デバイスの受信手段が、前記衛星航法システム受信機の時計の動作に必要な電力が当該時計に供給されない電力不足状態の発生が前記衛星航法システム受信機において検知されたか否かを示す検知情報を、前記衛星航法システム受信機から受信する受信工程と、
前記電子デバイスの送信手段が、前記電力不足状態の発生が前記衛星航法システム受信機において検知されたということを前記検知情報が示す場合に、前記電子デバイスの前記時計の時刻を示す第2時刻情報を前記衛星航法システム受信機へ送信する送信工程と、
を備えることを特徴とする電子デバイスの制御方法。
【請求項9】
コンピュータに、請求項7に記載の衛星航法システム受信機の制御方法の各工程を実行させるためのプログラム。
【請求項10】
コンピュータに、請求項8に記載の電子デバイスの制御方法の各工程を実行させるためのプログラム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2012−52925(P2012−52925A)
【公開日】平成24年3月15日(2012.3.15)
【国際特許分類】
【出願番号】特願2010−196089(P2010−196089)
【出願日】平成22年9月1日(2010.9.1)
【出願人】(000001007)キヤノン株式会社 (59,756)
【Fターム(参考)】
【公開日】平成24年3月15日(2012.3.15)
【国際特許分類】
【出願日】平成22年9月1日(2010.9.1)
【出願人】(000001007)キヤノン株式会社 (59,756)
【Fターム(参考)】
[ Back to top ]