
衝撃センサ
【課題】不感領域が少なく、広範な角度の加速度を検出可能な衝撃センサの提供を目的とすること。
【解決手段】
支持部1の中央に矩形状の収納部2が形成され、この収納部2内に加速度を検知する錘3が配置し、支持体1の上面には枠体4を配置する。枠体4には、開口部5a〜5dが形成され、この開口部5a〜開口部5dの間に梁部6a〜梁部6dが形成されている。梁部6a〜梁部6dは、加速度の作用を受けて変位する変位部7を枠体4の中央に支持している。梁部6a〜梁部6dの上面には、変位体7の変位を検出する検出素子8a〜検出素子8dが形成されている。2つの検出素子の出力が相殺されるように、検出素子8a〜検出素子8dが直列に接続し、検出素子8a〜検出素子8dの出力信号の総和を算出して加速度を検出する。
【解決手段】
支持部1の中央に矩形状の収納部2が形成され、この収納部2内に加速度を検知する錘3が配置し、支持体1の上面には枠体4を配置する。枠体4には、開口部5a〜5dが形成され、この開口部5a〜開口部5dの間に梁部6a〜梁部6dが形成されている。梁部6a〜梁部6dは、加速度の作用を受けて変位する変位部7を枠体4の中央に支持している。梁部6a〜梁部6dの上面には、変位体7の変位を検出する検出素子8a〜検出素子8dが形成されている。2つの検出素子の出力が相殺されるように、検出素子8a〜検出素子8dが直列に接続し、検出素子8a〜検出素子8dの出力信号の総和を算出して加速度を検出する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、互いに直交するX軸、Y軸及びZ軸の3軸方向の加速度を検出可能な衝撃センサに関する。
【背景技術】
【0002】
自動車産業や機械産業では、加速度を正確に検出できる小型の加速度センサの需要が高まっている。このような加速度センサとして、圧電素子を用いてXY平面内における各方向の加速度を検出する加速度センサ(例えば、特許文献1参照)や、互いに直交する3軸方向の加速度を同時に検出できる加速度センサが知られている(例えば、特許文献2参照)。
【0003】
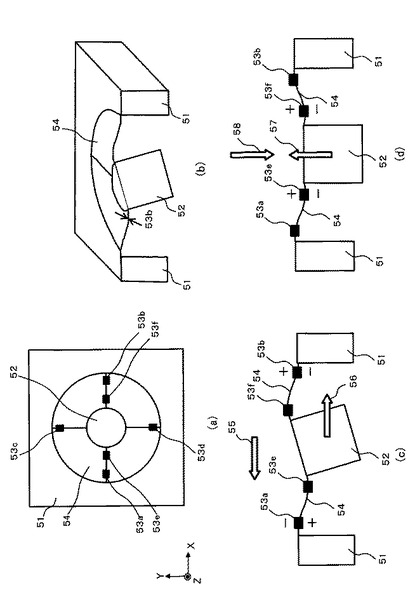
図7(a)は特許文献2に記載の加速度センサの上面図、図7(b)は図7(a)の斜視図である。この加速度センサは、中空部を有する支台51と、加速度を検知する作用体としての錘52と、上下一対の電極が形成され、加速度を電荷に変換する圧電素子53a〜圧電素子53fと、錘52と支台51との間に掛け渡された可撓板54とから構成されている。錘52の上面外周縁が可撓板54によって支台51の中空部に揺動自在に支持されている。
【0004】
図7(c)は、特許文献2に記載の加速度センサにX軸方向の加速度が作用した場合の模式図である。X軸上の矢印55の方向から加速度が作用した場合、錘52には矢印56の方向に慣性力が作用し、可撓板54に撓みが生じる。この場合、圧電素子53aには下側に押圧力が生じ、圧電素子53bには上側に押圧力が生じる。このため、圧電素子53a、53bの分極方向を反転させて配置し、圧電素子53aの下面の電極に生じる電荷と圧電素子53bの上面の電極に生じる電荷とを検出することによって加速度を検出することができる。
【0005】
矢印56の方向から加速度が作用した場合には、錘52には矢印55の方向に慣性力が作用する。この場合、圧電素子53aには上側に押圧力が生じ、圧電素子53bには下側に押圧力が生じる。この場合、圧電素子53aの上面の電極と圧電素子53bの下面の電極とに電荷が生じるため、矢印55の方向から加速度が作用した場合と比較して出力信号の極性が反転する。また、Y軸方向の加速度は、上記同様にY軸上に配置された圧電素子53c、53dによって検出される。
【0006】
図7(d)は、特許文献2に記載の加速度センサにZ軸方向の加速度が作用した場合の模式図である。Z軸上の矢印57の方向から加速度が作用した場合、錘51には矢印58の方向に慣性力が作用し、可撓板54に撓みが生じる。この場合、圧電素子53e、53fに共に下側方向に押圧力が生じる。このため、圧電素子53e、53fの分極方向を同一にし、圧電素子53e、53fの上面の電極に生じた電荷を検出することにより加速度を検出できる。また、X軸方向及びY軸方向と同様に、矢印58の方向から加速度が作用した際の出力信号は、矢印57の方向から加速度が作用した場合と比較し、極性が反転した出力信号が検出される。以上のようにして、軸方向毎に加速度を検出し、検出された出力信号を合算して加速度の大きさを検出する。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開平7−311217号公報
【特許文献2】特開平10−332503号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
しかしながら、特許文献2記載の加速度センサは、加速度が検出されない不感領域が生じる問題があった。例えば、XY平面内の2次元方向の加速度を検出する場合において、X軸方向とY軸方向との中間の角度となる45°方向又は135°方向から加速度が作用した場合、X軸方向の加速度の検出に用いる圧電素子53a、53bの出力信号の絶対値とY軸方向の加速度の検出に用いる圧電素子53c、53dの出力信号の絶対値とが等しくなる。更に、圧電素子53a、53bから正側の出力信号として加速度が検出され、圧電素子53c、53dから負側の出力信号として加速度が検出される場合、X軸方向の出力信号とY軸方向の出力信号とが相殺されて加速度を検出できない不感領域となる。このような不感領域は、XY平面、XZ平面、YZ平面内方向に少なくとも1軸ずつ存在し、更にそれらの軸を結ぶ曲面に存在する。具体的には、一般解で表わされるX=rsinθcosφ、Y=rsinθsinφ、Z=rcosθ及び極座標cosφ+sinφ+1/tanθ=0の関係を満たす曲面方向が不感領域となり、加速度の検出範囲が制限されていた。
【0009】
本発明はかかる点に鑑みてなされたものであり、不感領域が少なく、広範な角度の加速度を検出可能な衝撃センサの提供を目的とする。
【課題を解決するための手段】
【0010】
本発明の衝撃センサは、収納空間が形成された枠体と、前記枠体の収納空間に収容された錘と、前記錘を揺動自在に支持する少なくとも4つの梁と、それぞれの梁に設けられており、前記梁の動きをそれぞれ検出する上下一対の電極を有する検出素子と、を具備し、前記検出素子のうち、いずれか1つの検出素子の上下一対の電極の接続を他の検出素子の上下一対の電極の接続と異なるようにして前記検出素子を直列に接続してなることを特徴とする。
【0011】
この構成によれば、検出素子の出力信号のうち、何れか1つの検出素子の出力信号を反転して検出できるので、不感領域を1軸まで削減することができ、広範な範囲の加速度を検出することができる。
【0012】
本発明の衝撃センサは、収納空間が形成された枠体と、前記枠体の収納空間に収容された錘と、前記錘を揺動自在に支持する少なくとも4つの梁と、それぞれの梁に設けられており、前記梁の動きをそれぞれ検出する上下一対の電極を有する検出素子と、を具備し、前記検出素子のうち、いずれか1つの検出素子の分極方向が他の検出素子の分極方向と反転して前記検出素子を直列に接続してなることを特徴とする。
【0013】
この構成によれば、検出素子の出力信号のうち、何れか1つの検出素子の出力信号を反転して検出できるので、不感領域を1軸まで削減することができ、広範な範囲の加速度を検出することができる。
【0014】
本発明は、上記衝撃センサにおいて、前記検出素子に圧電素子を用いることができる。この構成によれば、梁上に形成した圧電素子を検出素子に用いることができるので、容易に検出素子を形成することができる。
【発明の効果】
【0015】
本発明によれば、不感領域が少なく、広範な角度の加速度を検出可能な衝撃センサを提供することができる。
【図面の簡単な説明】
【0016】
【図1】(a)本実施の形態に係る衝撃センサの分解斜視図、(b)本実施の形態に係る衝撃センサの斜視図である。
【図2】(a)本実施の形態に係る衝撃センサの変位部上面の要部拡大図であり、(b)図2(a)を下面からみた図である。
【図3】本実施の形態に係る衝撃センサの模式的な平面図である。
【図4】本実施の形態に係る衝撃センサの検出素子の構成を示す図である。
【図5】本実施の形態に係る衝撃センサの電極の接続を示す図である。
【図6】本実施の形態に係る衝撃センサに加速度が作用した際の模式図である。
【図7】(a)従来の加速度センサの平面図、(b)従来の加速度センサの斜視断面図、(c)従来の加速度センサの水平方向の加速度が作用した際の模式図、(d)従来の加速度センサの鉛直方向の加速度が作用した際の模式図である。
【発明を実施するための形態】
【0017】
以下、本発明の実施の形態について添付図面を参照して詳細に説明する。
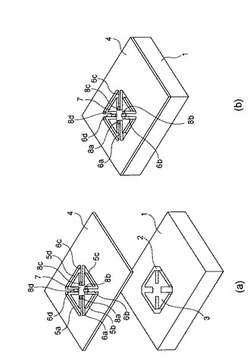
図1(a)は、本実施の形態に係る衝撃センサの分解斜視図であり、図1(b)は、本実施の形態に係る衝撃センサの斜視図である。
【0018】
本実施の形態に係る衝撃センサは、支持部1の中央に矩形状の収納部2が形成され、この収納部2内に加速度を検知する錘3が形成されている。支持部1の上面には、枠体4が形成されている。枠体4には、開口部5a〜開口部5dが形成され、この開口部5a〜開口部5dのそれぞれの間に梁部6a〜梁部6dが形成されている。梁部6a〜梁部6dは、加速度の作用を受けて変位する変位部7を枠体4の中央部に支持している。梁部6a〜梁部6dの上面には、加速度の作用を検出する検出素子8a〜検出素子8dが形成されている。
【0019】
支持体1及び錘3は第1の半導体基板から形成され、枠体4、梁部6a〜梁部6d及び変位部7は第2の半導体基板から形成されている。支持部1と枠体4とは、絶縁層を介して接合され、錘3と変位部7とは絶縁層を介して接合され、それぞれ一体に形成されている。すなわち、錘3と変位部7とは共に梁部6a〜梁部6dを介して枠体4に揺動自在に支持され、枠体4は支持部1によって支持されるように構成されている。
【0020】
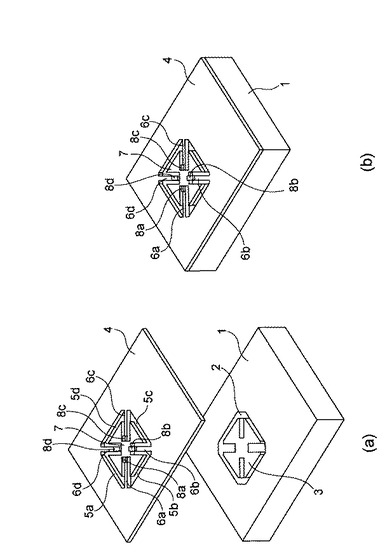
次に図2(a)、(b)を参照して、本実施の形態に係る衝撃センサの変位部7の構成について説明する。尚、図2(a)は変位部7の上面の要部拡大図であり、図2(b)は図2(a)を下面からみた図である。
【0021】
図2(a)、図2(b)に示すように、梁部6a〜梁部6dは、変位部7の中央部に変位部7の四方から接続されるように形成されている。梁部6a〜梁部6dのそれぞれの上面の梁部6a〜梁部6dと変位部7との接続部には、加速度を電荷に変換する検出素子8a〜検出素子8dが形成されている。また、変位部7の下面に接合される錘3の厚みは、梁部6a〜梁部6d及び変位部7より厚く形成されている。すなわち、梁部6a〜梁部6dは、錘3及び変位部7の重心より上部位置を四方から枠体4に支持するように構成されている。
【0022】
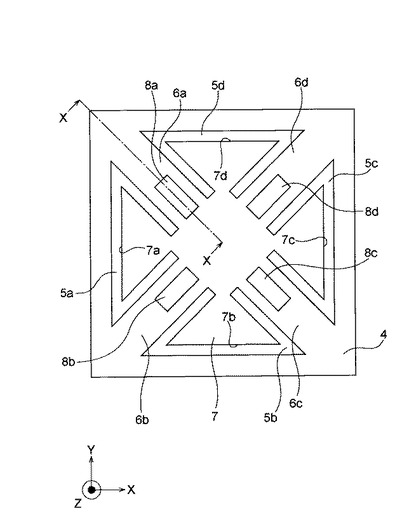
図3は、本実施の形態に係る衝撃センサの模式的な平面図を示している。尚、図3においては、錘3は図示していない。梁部6a〜梁部6dと変位部7との間は、開口部5a〜開口部5dによって離間されて形成されている。また、変位部7と図示されない錘3とは略面一になるように形成されている。すなわち、加速度の作用を受け、錘3及び変位体7が変位して梁部6a〜梁部6dに変位が生じた際に、梁部6a〜梁部6dに生じた変位が錘3及び変位部7によって規制されないように構成されている。尚、梁部6a〜梁部6dは、錘3及び変位部7の質量に応じてバネ定数が設定される。
【0023】
以上のように構成されることにより、本実施の形態に係る衝撃センサにおいて、加速度の作用を受ける錘3及び変位部7は、梁部6a〜梁部6dによって収納部2及び開口部5a〜開口部5d内でXY平面と直交する上下方向には揺動自在に支持されるが、XY平面方向への回転は規制された状態となっている。
【0024】
支持部1、錘3、枠体4、梁部6a〜梁部6d及び変位部7の材質は、シリコンを用いることができる。特に、本構造体においては、ベース層と、活性層と、ベース層及び活性層に挟持された絶縁層とから構成されたSOI基板を用いることが好ましい。例えば、相対的に薄いシリコン層である活性層をエッチングして図1(b)に示す枠体4を構成し、相対的に厚いシリコン層であるベース層をエッチングして図1(b)に示す支持部1を構成する。この場合において、梁部6a〜梁部6dは活性層で構成され、支持部1/枠体4の領域、錘3/変位部7の領域はベース層/絶縁層/活性層で構成される。すなわち、ベース層で構成された支持部1及び錘3上に、絶縁層を介して、活性層で構成された枠体4及び変位部7がそれぞれ積層されている。また、この場合において、エッチングとしては、deep RIE(Reactive Ion Etching)を用いることができる。
【0025】
また、本実施の形態に係る衝撃センサにおいて、錘部3及び支持部7の厚さは、100μm〜250μm、梁部6a〜梁部6d及び変位部7の厚さは、それぞれ5μm〜50μmとした。
【0026】
尚、本実施の形態に係る衝撃センサにおいて、加速度検出感度は、錘3(変位部7を含む)の質量及び/または梁部6a〜梁部6dのバネ定数を変更することによって任意に調整することができる。
【0027】
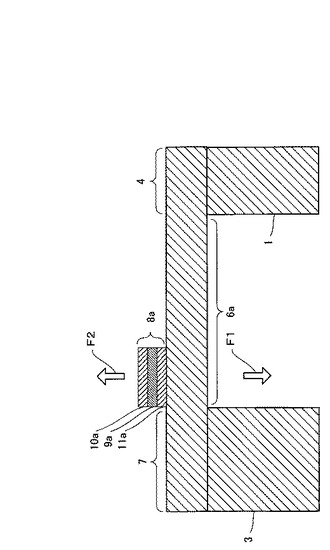
次に図4を参照して本実施の形態に係る衝撃センサの検出素子8a〜検出素子8dの構成を説明する。図4は図3のX−X線矢視断面の模式図を示している。検出素子8aは、上下方向に分極した圧電体膜9aと、圧電体膜9aを挟んで圧電体膜9aの上面に形成される上部電極10aと、圧電体膜9aの下面に形成される下部電極11aとを備えて構成される。
【0028】
変位部7が矢印F1方向に変位した際には、梁部6aに矢印F2方向の撓みが生じると共に、検出素子8aに矢印F2方向の押圧力が生じる。一方、変位部7が矢印F2方向に変位した際には、梁部6aに矢印F1方向に撓みが生じると共に、検出素子8aに矢印F1方向の押圧力が生じる。すなわち、本実施の形態においては、加速度の作用によって生じる変位部7の上下方向の変位を、一方向に分極された検出素子8aによって正負の電荷として検出することにより衝撃センサに作用する加速度を検出できるように構成されている。
【0029】
検出素子8aは、例えば、以下のようにして梁部6aの上面に形成することができる。梁部6aの材質にシリコンを用いた場合、シリコンを熱酸化してシリカ(SiO2)で形成された表面層を形成する。この表面層の上に図示されない下地膜、下部電極11a、圧電体膜9a及び上部電極10aの順に成膜することにより検出素子8aを形成することができる。圧電体膜9a、上部電極10a及び下部電極11aは、蒸着、スパッタリング、CVD等によって成膜することができる。
【0030】
下地膜の材質は、例えば、NiFe、NiCr、FeCrあるいはNiFeCr等を用いることが好ましい。また、下地膜の厚さは、2nm〜100nmであることが好ましいである。
【0031】
圧電体膜9aの材質は、圧電作用を有する各種圧電セラミックスを用いることができる。圧電セラミックスとしては、例えば、チタン酸ジルコン酸鉛(PZT)、チタン酸鉛(PT)、ジルコン酸鉛(PZ)、ZnO、AlN等が挙げられる。これらの中でも結晶配向性に優れるPZTを用いて形成することが好ましい。圧電体膜9aの厚さは、1μm〜3μm程度であることが好ましい。また、圧電体膜9aは、2つの圧電体を積層して形成することもでき、4つ以上の圧電体を積層して形成することもできる。
【0032】
上部電極10aの材質は、例えば、Pt、Au等、各種導電性材料を用いることができる。これらの中でも、圧電体膜9aの結晶配向性が向上し、圧電体膜9aの圧電定数を高めることが出来るPtを用いることが好ましい。
【0033】
下部電極11aの材質は、例えば、Pt、Pt合金、RuあるいはRu合金等を用いることが出来る。Pt合金としては例えば、Pt−Ti合金を用いることができる。またRu合金としては例えば、Ru−Ti合金を用いることができる。これらの中でもPtを用いて形成することが好ましい。下部電極11aの厚さは、50nm〜200nmであることが好ましい。
【0034】
尚、本実施形態においては、下部電極11aを形成せずに検出素子を構成することもできる。この場合、NiFe、NiCr、FeCrあるいはNiFeCrで形成された下地膜が下部電極11aとして機能する。
【0035】
以上、検出素子8aの構成について説明したが、検出素子8b〜検出素子8dも同様の構成で形成されている。
【0036】
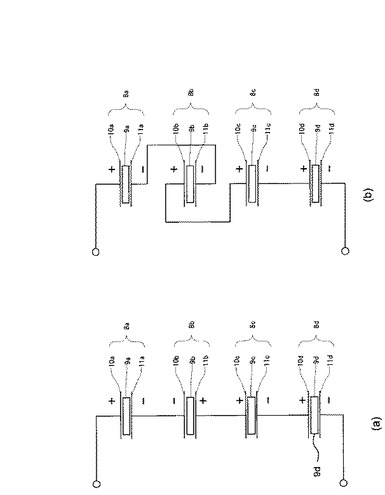
図5(a)、(b)は検出素子8a〜検出素子8dの電極配置と電極間の接続関係を示す図である。尚、図中において、検出素子8a〜検出素子8dの正負の記号は、各検出素子8a〜8dの分極方向を示している。本実施の形態の衝撃センサにおいては、各検出素子8a〜8dの出力信号のうち、2つの検出信号の出力信号が相殺されるように、検出素子8a〜検出素子8dで検出された出力信号の1つを他の3つの出力信号に対して反転して検出する。図5(a)は、検出素子8a〜検出素子8dを直列に接続すると共に、検出素子8bの分極方向を他の検出素子8a、8c及び8dに対して反転させた例を示している。図5(b)は、電極の接続を反転して検出素子8a〜検出素子8dの電極配置を同一とし、検出素子8bの電極の接続のみを他の検出素子8a、8c及び8dに対して逆にした例を示している。尚、図中では電極の接続を模式的に示しているが、本例において、各検出素子8a〜8dの上部電極10a〜上部電極10dと下部電極11a〜下部電極11dとの間の接続は、配線またはパターンで接続されている。
【0037】
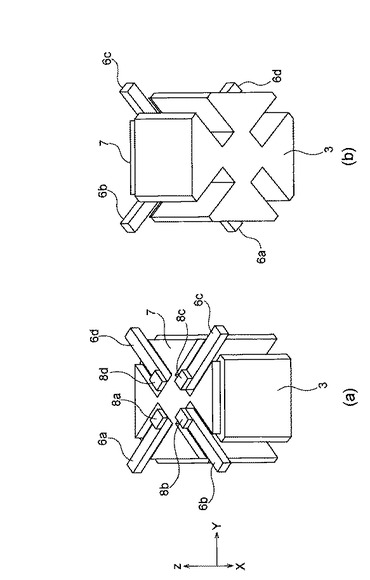
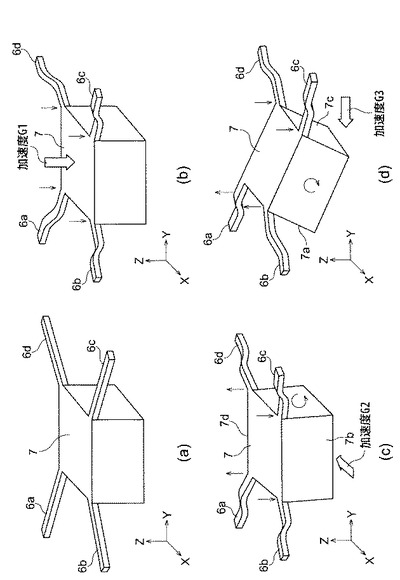
図6(a)〜(d)は、本実施の形態に係る衝撃センサの検出素子8a〜検出素子8dに作用する押圧力の印加方向と加速度の作用方向との関係を示す模式図である。図中では説明の便宜上、変位部7(錘部3を含む)及び梁部6a〜梁部6dのみを示し、梁部6a〜梁部6dが変位した場合における検出素子8a〜検出素子8dへの押圧力の印加方向を矢印に示している。また、検出素子8a〜検出素子8dの分極方向と接続は、図5(a)の例と同じものとして説明する。尚、本実施の形態に係る衝撃センサにおいては、変位部7に異なる軸方向から同じ大きさの加速度が作用した場合には、各検出素子8a〜8dで検出される出力信号の絶対値が等しくなるように調整されている。このため、検出素子8a〜検出素子8dの出力信号の総和をとることにより、加速度の大きさを検出できる。
【0038】
図6(a)は加速度が作用していない状態を示している。この状態では、検出素子8a〜検出素子8dは変位せず、圧電体膜9aに押圧力が印加されないため、出力信号が発生しない。
【0039】
図6(b)は変位部7にZ軸方向の加速度G1が作用した際の梁部6a〜梁部6dの変位を示している。この場合、検出素子8a〜検出素子8dに対して均等にZ軸下側方向に加速度G1が作用する。したがって、検出素子8a〜検出素子8dはZ軸下方向に押圧力が印加される。また、加速度G1と逆方向から加速度が作用した際には、検出素子8a〜検出素子8dはZ軸上側方向に押圧力が印加される。
【0040】
図6(c)は、変位部7に側面7b側からX軸方向の加速度G2が作用した際の梁部6a〜梁部6dの変位を示している。この場合、変位部7はX軸方向及びY軸方向の変位が規制されるため、加速度G2は変位部7に回転運動として作用する。したがって、検出素子8a、8dにはZ軸上側方向に押圧力が印加され、検出素子8b、8cにはZ軸下側方向に押圧力が印加される。また、加速度G2と逆方向の側面7d側から加速度が作用した場合は、変位部7に逆方向の回転運動が作用し、検出素子8a、8dにはZ軸下側方向に押圧力が印加され、検出素子8b、8cにはZ軸上側方向に押圧力が印加される。
【0041】
図6(d)は、変位部7に側面7c側からY軸方向の加速度G3が作用した際の梁部6a〜梁部6dの変位を示している。この場合、上述したX軸方向から加速度が作用した時と同様に加速度は変位部7の回転運動に変換される。したがって、検出素子8a、8bにはZ軸上側方向に押圧力が印加され、検出素子8c、8dにはZ軸下側方向に押圧力が印加される。また、加速度G3と逆方向の側面7a側から加速度が作用した場合は、変位部7に逆方向の回転運動が作用し、検出素子8a、8bにはZ軸下側方向に押圧力が印加され、検出素子8c、8dはZ軸上側方向に押圧力が印加される。
【0042】
次に検出素子8a〜検出素子8dの出力信号を用いた加速度の算出内容について説明する。検出素子8a〜検出素子8dの接続関係及び電極配置は図5(a)に示したものと同一とする。Z軸方向の加速度G1が作用した場合、検出素子8a〜検出素子8dに図6(b)に示す押圧力が印加され、上部電極10b、下部電極11a、11c及び11dに電荷が生じる。この場合の単位加速度あたりの出力信号ΔVzは、検出素子8aの出力信号をΔVa、検出素子8bの出力信号をΔVb、検出素子8cの出力信号をΔVc、検出素子8dの出力信号をΔVdとすると、ΔVz=−ΔVa+ΔVb−ΔVc−ΔVdとなる。また、上記のように同じ加速度が印加された時の検出素子8a〜検出素子8dでの電極に生じる電荷は等しくなるように調整されているので、ΔVa=ΔVb=ΔVc=ΔVdとなる。したがって、ΔVz=−2ΔVaとして表わされる。また、加速度G1と逆方向から加速度が作用した場合は検出素子8a〜検出素子8dに生じる電荷が反転するので、ΔVz=2ΔVaとなる。
【0043】
X軸方向の加速度G2が作用した場合、検出素子8a〜検出素子8dに図6(c)に示す押圧力が印加され、上部電極10a、10b、10c及び下部電極11dに電荷が生じる。この場合の単位加速度あたりの出力信号ΔVxは、ΔVx=ΔVa+ΔVb+ΔVc−ΔVdとなる。したがって、ΔVx=2ΔVaとして表わされる。また、加速度G2と逆方向から加速度が作用した場合は検出素子8a〜検出素子8dに生じる電荷が反転するので、ΔVx=−2ΔVaとなる。
【0044】
Y軸方向の加速度G3が作用した場合、検出素子8a〜検出素子8dに図6(d)に示す押圧力が印加され、上部電極10a、10b、10d及び下部電極11cに電荷が生じる。この場合の単位加速度あたりの出力信号ΔVyは、ΔVy=ΔVa+ΔVb−ΔVc+ΔVdとなる。したがって、ΔVy=2ΔVaとして表わされる。また、加速度G3と逆方向から加速度が作用した場合は検出素子8a〜検出素子8dに生じる電荷が反転するので、ΔVy=−2ΔVaとなる。
【0045】
上述したように、X軸、Y軸及びZ軸の単位加速度あたりの出力信号の絶対値は、ΔVx=ΔVy=ΔVz=2ΔVaとなる。このため、同じ大きさの加速度は、軸方向を問わずに同じ大きさの出力信号として検出することができる。したがって、直列に配列した検出素子8a〜検出素子8dの上部電極10a〜条部電極10d及び下部電極11a〜下部電極11dに発生した出力信号の総和をとることにより、加速度の大きさを算出することができる。
【0046】
本実施の形態においては、検出素子8a〜検出素子8dの正と負の出力信号の総和をとるため、総和が零となる時に不感領域となる。このような検出角度としては、図6(a)における、検出素子8a、8bの支持点となる対角線を軸に回転運動が生じる1軸のみであり、その他の角度に関しては加速度を検出することができる。このため、従来技術より広範な範囲の加速度の検出が可能となる。
【0047】
また、本実施の形態に係る衝撃センサは、検出された出力信号の総和をとることにより3軸方向の加速度の大きさを算出できるため、複雑な演算を要するIC回路等を必要としない。従来技術では、3軸方向の加速度を軸毎に測定し、合算する方法がとられてきたため、演算回路が不可欠であった。このため、コストダウンや、小型化に関して問題があった。本実施の形態における加速度センサでは、演算用のICチップを設けて複雑な演算をする必要がないため、生産コストの低減及び装置の小型化が達成できる。
【0048】
なお、本発明は上記実施例の形態に限定されるものではない。例えば、錘は直方体に限らず多角柱、円柱等が使用するなど、本発明の要旨を逸脱しない範囲で変形実施可能である。
【産業上の利用可能性】
【0049】
本発明は、エアバックを作動させるための衝撃センサや、あるいは、携帯機器の衝撃センサ等に有用である。
【符号の説明】
【0050】
1 支持部
2 収納部
3、52 錘
4 枠体
5a〜5d 開口部
6a〜6d 梁部
7 変位部
8a〜8d 検出素子
9a〜9d 圧電体膜
10a〜10d 上部電極
11a〜11d 下部電極
51 支台
53a〜53f 圧電素子
54 可撓板
【技術分野】
【0001】
本発明は、互いに直交するX軸、Y軸及びZ軸の3軸方向の加速度を検出可能な衝撃センサに関する。
【背景技術】
【0002】
自動車産業や機械産業では、加速度を正確に検出できる小型の加速度センサの需要が高まっている。このような加速度センサとして、圧電素子を用いてXY平面内における各方向の加速度を検出する加速度センサ(例えば、特許文献1参照)や、互いに直交する3軸方向の加速度を同時に検出できる加速度センサが知られている(例えば、特許文献2参照)。
【0003】
図7(a)は特許文献2に記載の加速度センサの上面図、図7(b)は図7(a)の斜視図である。この加速度センサは、中空部を有する支台51と、加速度を検知する作用体としての錘52と、上下一対の電極が形成され、加速度を電荷に変換する圧電素子53a〜圧電素子53fと、錘52と支台51との間に掛け渡された可撓板54とから構成されている。錘52の上面外周縁が可撓板54によって支台51の中空部に揺動自在に支持されている。
【0004】
図7(c)は、特許文献2に記載の加速度センサにX軸方向の加速度が作用した場合の模式図である。X軸上の矢印55の方向から加速度が作用した場合、錘52には矢印56の方向に慣性力が作用し、可撓板54に撓みが生じる。この場合、圧電素子53aには下側に押圧力が生じ、圧電素子53bには上側に押圧力が生じる。このため、圧電素子53a、53bの分極方向を反転させて配置し、圧電素子53aの下面の電極に生じる電荷と圧電素子53bの上面の電極に生じる電荷とを検出することによって加速度を検出することができる。
【0005】
矢印56の方向から加速度が作用した場合には、錘52には矢印55の方向に慣性力が作用する。この場合、圧電素子53aには上側に押圧力が生じ、圧電素子53bには下側に押圧力が生じる。この場合、圧電素子53aの上面の電極と圧電素子53bの下面の電極とに電荷が生じるため、矢印55の方向から加速度が作用した場合と比較して出力信号の極性が反転する。また、Y軸方向の加速度は、上記同様にY軸上に配置された圧電素子53c、53dによって検出される。
【0006】
図7(d)は、特許文献2に記載の加速度センサにZ軸方向の加速度が作用した場合の模式図である。Z軸上の矢印57の方向から加速度が作用した場合、錘51には矢印58の方向に慣性力が作用し、可撓板54に撓みが生じる。この場合、圧電素子53e、53fに共に下側方向に押圧力が生じる。このため、圧電素子53e、53fの分極方向を同一にし、圧電素子53e、53fの上面の電極に生じた電荷を検出することにより加速度を検出できる。また、X軸方向及びY軸方向と同様に、矢印58の方向から加速度が作用した際の出力信号は、矢印57の方向から加速度が作用した場合と比較し、極性が反転した出力信号が検出される。以上のようにして、軸方向毎に加速度を検出し、検出された出力信号を合算して加速度の大きさを検出する。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開平7−311217号公報
【特許文献2】特開平10−332503号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
しかしながら、特許文献2記載の加速度センサは、加速度が検出されない不感領域が生じる問題があった。例えば、XY平面内の2次元方向の加速度を検出する場合において、X軸方向とY軸方向との中間の角度となる45°方向又は135°方向から加速度が作用した場合、X軸方向の加速度の検出に用いる圧電素子53a、53bの出力信号の絶対値とY軸方向の加速度の検出に用いる圧電素子53c、53dの出力信号の絶対値とが等しくなる。更に、圧電素子53a、53bから正側の出力信号として加速度が検出され、圧電素子53c、53dから負側の出力信号として加速度が検出される場合、X軸方向の出力信号とY軸方向の出力信号とが相殺されて加速度を検出できない不感領域となる。このような不感領域は、XY平面、XZ平面、YZ平面内方向に少なくとも1軸ずつ存在し、更にそれらの軸を結ぶ曲面に存在する。具体的には、一般解で表わされるX=rsinθcosφ、Y=rsinθsinφ、Z=rcosθ及び極座標cosφ+sinφ+1/tanθ=0の関係を満たす曲面方向が不感領域となり、加速度の検出範囲が制限されていた。
【0009】
本発明はかかる点に鑑みてなされたものであり、不感領域が少なく、広範な角度の加速度を検出可能な衝撃センサの提供を目的とする。
【課題を解決するための手段】
【0010】
本発明の衝撃センサは、収納空間が形成された枠体と、前記枠体の収納空間に収容された錘と、前記錘を揺動自在に支持する少なくとも4つの梁と、それぞれの梁に設けられており、前記梁の動きをそれぞれ検出する上下一対の電極を有する検出素子と、を具備し、前記検出素子のうち、いずれか1つの検出素子の上下一対の電極の接続を他の検出素子の上下一対の電極の接続と異なるようにして前記検出素子を直列に接続してなることを特徴とする。
【0011】
この構成によれば、検出素子の出力信号のうち、何れか1つの検出素子の出力信号を反転して検出できるので、不感領域を1軸まで削減することができ、広範な範囲の加速度を検出することができる。
【0012】
本発明の衝撃センサは、収納空間が形成された枠体と、前記枠体の収納空間に収容された錘と、前記錘を揺動自在に支持する少なくとも4つの梁と、それぞれの梁に設けられており、前記梁の動きをそれぞれ検出する上下一対の電極を有する検出素子と、を具備し、前記検出素子のうち、いずれか1つの検出素子の分極方向が他の検出素子の分極方向と反転して前記検出素子を直列に接続してなることを特徴とする。
【0013】
この構成によれば、検出素子の出力信号のうち、何れか1つの検出素子の出力信号を反転して検出できるので、不感領域を1軸まで削減することができ、広範な範囲の加速度を検出することができる。
【0014】
本発明は、上記衝撃センサにおいて、前記検出素子に圧電素子を用いることができる。この構成によれば、梁上に形成した圧電素子を検出素子に用いることができるので、容易に検出素子を形成することができる。
【発明の効果】
【0015】
本発明によれば、不感領域が少なく、広範な角度の加速度を検出可能な衝撃センサを提供することができる。
【図面の簡単な説明】
【0016】
【図1】(a)本実施の形態に係る衝撃センサの分解斜視図、(b)本実施の形態に係る衝撃センサの斜視図である。
【図2】(a)本実施の形態に係る衝撃センサの変位部上面の要部拡大図であり、(b)図2(a)を下面からみた図である。
【図3】本実施の形態に係る衝撃センサの模式的な平面図である。
【図4】本実施の形態に係る衝撃センサの検出素子の構成を示す図である。
【図5】本実施の形態に係る衝撃センサの電極の接続を示す図である。
【図6】本実施の形態に係る衝撃センサに加速度が作用した際の模式図である。
【図7】(a)従来の加速度センサの平面図、(b)従来の加速度センサの斜視断面図、(c)従来の加速度センサの水平方向の加速度が作用した際の模式図、(d)従来の加速度センサの鉛直方向の加速度が作用した際の模式図である。
【発明を実施するための形態】
【0017】
以下、本発明の実施の形態について添付図面を参照して詳細に説明する。
図1(a)は、本実施の形態に係る衝撃センサの分解斜視図であり、図1(b)は、本実施の形態に係る衝撃センサの斜視図である。
【0018】
本実施の形態に係る衝撃センサは、支持部1の中央に矩形状の収納部2が形成され、この収納部2内に加速度を検知する錘3が形成されている。支持部1の上面には、枠体4が形成されている。枠体4には、開口部5a〜開口部5dが形成され、この開口部5a〜開口部5dのそれぞれの間に梁部6a〜梁部6dが形成されている。梁部6a〜梁部6dは、加速度の作用を受けて変位する変位部7を枠体4の中央部に支持している。梁部6a〜梁部6dの上面には、加速度の作用を検出する検出素子8a〜検出素子8dが形成されている。
【0019】
支持体1及び錘3は第1の半導体基板から形成され、枠体4、梁部6a〜梁部6d及び変位部7は第2の半導体基板から形成されている。支持部1と枠体4とは、絶縁層を介して接合され、錘3と変位部7とは絶縁層を介して接合され、それぞれ一体に形成されている。すなわち、錘3と変位部7とは共に梁部6a〜梁部6dを介して枠体4に揺動自在に支持され、枠体4は支持部1によって支持されるように構成されている。
【0020】
次に図2(a)、(b)を参照して、本実施の形態に係る衝撃センサの変位部7の構成について説明する。尚、図2(a)は変位部7の上面の要部拡大図であり、図2(b)は図2(a)を下面からみた図である。
【0021】
図2(a)、図2(b)に示すように、梁部6a〜梁部6dは、変位部7の中央部に変位部7の四方から接続されるように形成されている。梁部6a〜梁部6dのそれぞれの上面の梁部6a〜梁部6dと変位部7との接続部には、加速度を電荷に変換する検出素子8a〜検出素子8dが形成されている。また、変位部7の下面に接合される錘3の厚みは、梁部6a〜梁部6d及び変位部7より厚く形成されている。すなわち、梁部6a〜梁部6dは、錘3及び変位部7の重心より上部位置を四方から枠体4に支持するように構成されている。
【0022】
図3は、本実施の形態に係る衝撃センサの模式的な平面図を示している。尚、図3においては、錘3は図示していない。梁部6a〜梁部6dと変位部7との間は、開口部5a〜開口部5dによって離間されて形成されている。また、変位部7と図示されない錘3とは略面一になるように形成されている。すなわち、加速度の作用を受け、錘3及び変位体7が変位して梁部6a〜梁部6dに変位が生じた際に、梁部6a〜梁部6dに生じた変位が錘3及び変位部7によって規制されないように構成されている。尚、梁部6a〜梁部6dは、錘3及び変位部7の質量に応じてバネ定数が設定される。
【0023】
以上のように構成されることにより、本実施の形態に係る衝撃センサにおいて、加速度の作用を受ける錘3及び変位部7は、梁部6a〜梁部6dによって収納部2及び開口部5a〜開口部5d内でXY平面と直交する上下方向には揺動自在に支持されるが、XY平面方向への回転は規制された状態となっている。
【0024】
支持部1、錘3、枠体4、梁部6a〜梁部6d及び変位部7の材質は、シリコンを用いることができる。特に、本構造体においては、ベース層と、活性層と、ベース層及び活性層に挟持された絶縁層とから構成されたSOI基板を用いることが好ましい。例えば、相対的に薄いシリコン層である活性層をエッチングして図1(b)に示す枠体4を構成し、相対的に厚いシリコン層であるベース層をエッチングして図1(b)に示す支持部1を構成する。この場合において、梁部6a〜梁部6dは活性層で構成され、支持部1/枠体4の領域、錘3/変位部7の領域はベース層/絶縁層/活性層で構成される。すなわち、ベース層で構成された支持部1及び錘3上に、絶縁層を介して、活性層で構成された枠体4及び変位部7がそれぞれ積層されている。また、この場合において、エッチングとしては、deep RIE(Reactive Ion Etching)を用いることができる。
【0025】
また、本実施の形態に係る衝撃センサにおいて、錘部3及び支持部7の厚さは、100μm〜250μm、梁部6a〜梁部6d及び変位部7の厚さは、それぞれ5μm〜50μmとした。
【0026】
尚、本実施の形態に係る衝撃センサにおいて、加速度検出感度は、錘3(変位部7を含む)の質量及び/または梁部6a〜梁部6dのバネ定数を変更することによって任意に調整することができる。
【0027】
次に図4を参照して本実施の形態に係る衝撃センサの検出素子8a〜検出素子8dの構成を説明する。図4は図3のX−X線矢視断面の模式図を示している。検出素子8aは、上下方向に分極した圧電体膜9aと、圧電体膜9aを挟んで圧電体膜9aの上面に形成される上部電極10aと、圧電体膜9aの下面に形成される下部電極11aとを備えて構成される。
【0028】
変位部7が矢印F1方向に変位した際には、梁部6aに矢印F2方向の撓みが生じると共に、検出素子8aに矢印F2方向の押圧力が生じる。一方、変位部7が矢印F2方向に変位した際には、梁部6aに矢印F1方向に撓みが生じると共に、検出素子8aに矢印F1方向の押圧力が生じる。すなわち、本実施の形態においては、加速度の作用によって生じる変位部7の上下方向の変位を、一方向に分極された検出素子8aによって正負の電荷として検出することにより衝撃センサに作用する加速度を検出できるように構成されている。
【0029】
検出素子8aは、例えば、以下のようにして梁部6aの上面に形成することができる。梁部6aの材質にシリコンを用いた場合、シリコンを熱酸化してシリカ(SiO2)で形成された表面層を形成する。この表面層の上に図示されない下地膜、下部電極11a、圧電体膜9a及び上部電極10aの順に成膜することにより検出素子8aを形成することができる。圧電体膜9a、上部電極10a及び下部電極11aは、蒸着、スパッタリング、CVD等によって成膜することができる。
【0030】
下地膜の材質は、例えば、NiFe、NiCr、FeCrあるいはNiFeCr等を用いることが好ましい。また、下地膜の厚さは、2nm〜100nmであることが好ましいである。
【0031】
圧電体膜9aの材質は、圧電作用を有する各種圧電セラミックスを用いることができる。圧電セラミックスとしては、例えば、チタン酸ジルコン酸鉛(PZT)、チタン酸鉛(PT)、ジルコン酸鉛(PZ)、ZnO、AlN等が挙げられる。これらの中でも結晶配向性に優れるPZTを用いて形成することが好ましい。圧電体膜9aの厚さは、1μm〜3μm程度であることが好ましい。また、圧電体膜9aは、2つの圧電体を積層して形成することもでき、4つ以上の圧電体を積層して形成することもできる。
【0032】
上部電極10aの材質は、例えば、Pt、Au等、各種導電性材料を用いることができる。これらの中でも、圧電体膜9aの結晶配向性が向上し、圧電体膜9aの圧電定数を高めることが出来るPtを用いることが好ましい。
【0033】
下部電極11aの材質は、例えば、Pt、Pt合金、RuあるいはRu合金等を用いることが出来る。Pt合金としては例えば、Pt−Ti合金を用いることができる。またRu合金としては例えば、Ru−Ti合金を用いることができる。これらの中でもPtを用いて形成することが好ましい。下部電極11aの厚さは、50nm〜200nmであることが好ましい。
【0034】
尚、本実施形態においては、下部電極11aを形成せずに検出素子を構成することもできる。この場合、NiFe、NiCr、FeCrあるいはNiFeCrで形成された下地膜が下部電極11aとして機能する。
【0035】
以上、検出素子8aの構成について説明したが、検出素子8b〜検出素子8dも同様の構成で形成されている。
【0036】
図5(a)、(b)は検出素子8a〜検出素子8dの電極配置と電極間の接続関係を示す図である。尚、図中において、検出素子8a〜検出素子8dの正負の記号は、各検出素子8a〜8dの分極方向を示している。本実施の形態の衝撃センサにおいては、各検出素子8a〜8dの出力信号のうち、2つの検出信号の出力信号が相殺されるように、検出素子8a〜検出素子8dで検出された出力信号の1つを他の3つの出力信号に対して反転して検出する。図5(a)は、検出素子8a〜検出素子8dを直列に接続すると共に、検出素子8bの分極方向を他の検出素子8a、8c及び8dに対して反転させた例を示している。図5(b)は、電極の接続を反転して検出素子8a〜検出素子8dの電極配置を同一とし、検出素子8bの電極の接続のみを他の検出素子8a、8c及び8dに対して逆にした例を示している。尚、図中では電極の接続を模式的に示しているが、本例において、各検出素子8a〜8dの上部電極10a〜上部電極10dと下部電極11a〜下部電極11dとの間の接続は、配線またはパターンで接続されている。
【0037】
図6(a)〜(d)は、本実施の形態に係る衝撃センサの検出素子8a〜検出素子8dに作用する押圧力の印加方向と加速度の作用方向との関係を示す模式図である。図中では説明の便宜上、変位部7(錘部3を含む)及び梁部6a〜梁部6dのみを示し、梁部6a〜梁部6dが変位した場合における検出素子8a〜検出素子8dへの押圧力の印加方向を矢印に示している。また、検出素子8a〜検出素子8dの分極方向と接続は、図5(a)の例と同じものとして説明する。尚、本実施の形態に係る衝撃センサにおいては、変位部7に異なる軸方向から同じ大きさの加速度が作用した場合には、各検出素子8a〜8dで検出される出力信号の絶対値が等しくなるように調整されている。このため、検出素子8a〜検出素子8dの出力信号の総和をとることにより、加速度の大きさを検出できる。
【0038】
図6(a)は加速度が作用していない状態を示している。この状態では、検出素子8a〜検出素子8dは変位せず、圧電体膜9aに押圧力が印加されないため、出力信号が発生しない。
【0039】
図6(b)は変位部7にZ軸方向の加速度G1が作用した際の梁部6a〜梁部6dの変位を示している。この場合、検出素子8a〜検出素子8dに対して均等にZ軸下側方向に加速度G1が作用する。したがって、検出素子8a〜検出素子8dはZ軸下方向に押圧力が印加される。また、加速度G1と逆方向から加速度が作用した際には、検出素子8a〜検出素子8dはZ軸上側方向に押圧力が印加される。
【0040】
図6(c)は、変位部7に側面7b側からX軸方向の加速度G2が作用した際の梁部6a〜梁部6dの変位を示している。この場合、変位部7はX軸方向及びY軸方向の変位が規制されるため、加速度G2は変位部7に回転運動として作用する。したがって、検出素子8a、8dにはZ軸上側方向に押圧力が印加され、検出素子8b、8cにはZ軸下側方向に押圧力が印加される。また、加速度G2と逆方向の側面7d側から加速度が作用した場合は、変位部7に逆方向の回転運動が作用し、検出素子8a、8dにはZ軸下側方向に押圧力が印加され、検出素子8b、8cにはZ軸上側方向に押圧力が印加される。
【0041】
図6(d)は、変位部7に側面7c側からY軸方向の加速度G3が作用した際の梁部6a〜梁部6dの変位を示している。この場合、上述したX軸方向から加速度が作用した時と同様に加速度は変位部7の回転運動に変換される。したがって、検出素子8a、8bにはZ軸上側方向に押圧力が印加され、検出素子8c、8dにはZ軸下側方向に押圧力が印加される。また、加速度G3と逆方向の側面7a側から加速度が作用した場合は、変位部7に逆方向の回転運動が作用し、検出素子8a、8bにはZ軸下側方向に押圧力が印加され、検出素子8c、8dはZ軸上側方向に押圧力が印加される。
【0042】
次に検出素子8a〜検出素子8dの出力信号を用いた加速度の算出内容について説明する。検出素子8a〜検出素子8dの接続関係及び電極配置は図5(a)に示したものと同一とする。Z軸方向の加速度G1が作用した場合、検出素子8a〜検出素子8dに図6(b)に示す押圧力が印加され、上部電極10b、下部電極11a、11c及び11dに電荷が生じる。この場合の単位加速度あたりの出力信号ΔVzは、検出素子8aの出力信号をΔVa、検出素子8bの出力信号をΔVb、検出素子8cの出力信号をΔVc、検出素子8dの出力信号をΔVdとすると、ΔVz=−ΔVa+ΔVb−ΔVc−ΔVdとなる。また、上記のように同じ加速度が印加された時の検出素子8a〜検出素子8dでの電極に生じる電荷は等しくなるように調整されているので、ΔVa=ΔVb=ΔVc=ΔVdとなる。したがって、ΔVz=−2ΔVaとして表わされる。また、加速度G1と逆方向から加速度が作用した場合は検出素子8a〜検出素子8dに生じる電荷が反転するので、ΔVz=2ΔVaとなる。
【0043】
X軸方向の加速度G2が作用した場合、検出素子8a〜検出素子8dに図6(c)に示す押圧力が印加され、上部電極10a、10b、10c及び下部電極11dに電荷が生じる。この場合の単位加速度あたりの出力信号ΔVxは、ΔVx=ΔVa+ΔVb+ΔVc−ΔVdとなる。したがって、ΔVx=2ΔVaとして表わされる。また、加速度G2と逆方向から加速度が作用した場合は検出素子8a〜検出素子8dに生じる電荷が反転するので、ΔVx=−2ΔVaとなる。
【0044】
Y軸方向の加速度G3が作用した場合、検出素子8a〜検出素子8dに図6(d)に示す押圧力が印加され、上部電極10a、10b、10d及び下部電極11cに電荷が生じる。この場合の単位加速度あたりの出力信号ΔVyは、ΔVy=ΔVa+ΔVb−ΔVc+ΔVdとなる。したがって、ΔVy=2ΔVaとして表わされる。また、加速度G3と逆方向から加速度が作用した場合は検出素子8a〜検出素子8dに生じる電荷が反転するので、ΔVy=−2ΔVaとなる。
【0045】
上述したように、X軸、Y軸及びZ軸の単位加速度あたりの出力信号の絶対値は、ΔVx=ΔVy=ΔVz=2ΔVaとなる。このため、同じ大きさの加速度は、軸方向を問わずに同じ大きさの出力信号として検出することができる。したがって、直列に配列した検出素子8a〜検出素子8dの上部電極10a〜条部電極10d及び下部電極11a〜下部電極11dに発生した出力信号の総和をとることにより、加速度の大きさを算出することができる。
【0046】
本実施の形態においては、検出素子8a〜検出素子8dの正と負の出力信号の総和をとるため、総和が零となる時に不感領域となる。このような検出角度としては、図6(a)における、検出素子8a、8bの支持点となる対角線を軸に回転運動が生じる1軸のみであり、その他の角度に関しては加速度を検出することができる。このため、従来技術より広範な範囲の加速度の検出が可能となる。
【0047】
また、本実施の形態に係る衝撃センサは、検出された出力信号の総和をとることにより3軸方向の加速度の大きさを算出できるため、複雑な演算を要するIC回路等を必要としない。従来技術では、3軸方向の加速度を軸毎に測定し、合算する方法がとられてきたため、演算回路が不可欠であった。このため、コストダウンや、小型化に関して問題があった。本実施の形態における加速度センサでは、演算用のICチップを設けて複雑な演算をする必要がないため、生産コストの低減及び装置の小型化が達成できる。
【0048】
なお、本発明は上記実施例の形態に限定されるものではない。例えば、錘は直方体に限らず多角柱、円柱等が使用するなど、本発明の要旨を逸脱しない範囲で変形実施可能である。
【産業上の利用可能性】
【0049】
本発明は、エアバックを作動させるための衝撃センサや、あるいは、携帯機器の衝撃センサ等に有用である。
【符号の説明】
【0050】
1 支持部
2 収納部
3、52 錘
4 枠体
5a〜5d 開口部
6a〜6d 梁部
7 変位部
8a〜8d 検出素子
9a〜9d 圧電体膜
10a〜10d 上部電極
11a〜11d 下部電極
51 支台
53a〜53f 圧電素子
54 可撓板
【特許請求の範囲】
【請求項1】
収納空間が形成された枠体と、前記枠体の収納空間に収容された錘と、前記錘を揺動自在に支持する少なくとも4つの梁と、それぞれの梁に設けられており、前記梁の動きをそれぞれ検出する上下一対の電極を有する検出素子と、を具備し、前記検出素子のうち、いずれか1つの検出素子の上下一対の電極の接続が他の検出素子の上下一対の電極の接続と異なるようにして前記検出素子を直列に接続してなることを特徴とする衝撃センサ。
【請求項2】
収納空間が形成された枠体と、前記枠体の収納空間に収容された錘と、前記錘を揺動自在に支持する少なくとも4つの梁と、それぞれの梁に設けられており、前記梁の動きをそれぞれ検出する上下一対の電極を有する検出素子と、を具備し、前記検出素子のうち、いずれか1つの検出素子の分極方向が他の検出素子の分極方向と反転して前記検出素子を直列に接続してなることを特徴とする衝撃センサ。
【請求項3】
前記検出素子が圧電素子であることを特徴とする請求項1または請求項2記載の衝撃センサ。
【請求項1】
収納空間が形成された枠体と、前記枠体の収納空間に収容された錘と、前記錘を揺動自在に支持する少なくとも4つの梁と、それぞれの梁に設けられており、前記梁の動きをそれぞれ検出する上下一対の電極を有する検出素子と、を具備し、前記検出素子のうち、いずれか1つの検出素子の上下一対の電極の接続が他の検出素子の上下一対の電極の接続と異なるようにして前記検出素子を直列に接続してなることを特徴とする衝撃センサ。
【請求項2】
収納空間が形成された枠体と、前記枠体の収納空間に収容された錘と、前記錘を揺動自在に支持する少なくとも4つの梁と、それぞれの梁に設けられており、前記梁の動きをそれぞれ検出する上下一対の電極を有する検出素子と、を具備し、前記検出素子のうち、いずれか1つの検出素子の分極方向が他の検出素子の分極方向と反転して前記検出素子を直列に接続してなることを特徴とする衝撃センサ。
【請求項3】
前記検出素子が圧電素子であることを特徴とする請求項1または請求項2記載の衝撃センサ。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2010−175500(P2010−175500A)
【公開日】平成22年8月12日(2010.8.12)
【国際特許分類】
【出願番号】特願2009−21368(P2009−21368)
【出願日】平成21年2月2日(2009.2.2)
【出願人】(000010098)アルプス電気株式会社 (4,263)
【公開日】平成22年8月12日(2010.8.12)
【国際特許分類】
【出願日】平成21年2月2日(2009.2.2)
【出願人】(000010098)アルプス電気株式会社 (4,263)
[ Back to top ]