
衝突予測装置
【課題】低コストで精度の高い衝突予測を可能とする衝突予測装置を提供する。
【解決手段】車両に搭載され、当該車両と障害物との衝突を予測する衝突予測装置であって、車両の周囲に電磁波を送信し、障害物から反射された当該電磁波の反射波を受信することによって当該障害物を検出する障害物検出手段と、障害物が検出された場合、車両と障害物との衝突の危険性が高いか否かを判定する衝突判定手段と、高さの異なるフロアを往来するためのスロープを備えた建築造成物内において当該スロープ上を車両が走行している可能性が高いか否かを判定するスロープ走行判定手段と、車両がスロープを走行している可能性が高いと判定された場合、衝突判定手段の判定感度を車両がスロープを走行している可能性が高いと判定されていない場合に比べて低減する感度変更手段とを備える、衝突予測装置。
【解決手段】車両に搭載され、当該車両と障害物との衝突を予測する衝突予測装置であって、車両の周囲に電磁波を送信し、障害物から反射された当該電磁波の反射波を受信することによって当該障害物を検出する障害物検出手段と、障害物が検出された場合、車両と障害物との衝突の危険性が高いか否かを判定する衝突判定手段と、高さの異なるフロアを往来するためのスロープを備えた建築造成物内において当該スロープ上を車両が走行している可能性が高いか否かを判定するスロープ走行判定手段と、車両がスロープを走行している可能性が高いと判定された場合、衝突判定手段の判定感度を車両がスロープを走行している可能性が高いと判定されていない場合に比べて低減する感度変更手段とを備える、衝突予測装置。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、衝突予測装置に関し、より特定的には、車両に搭載され、当該車両と障害物との衝突を予測する衝突予測装置に関する。
【背景技術】
【0002】
従来、車両周囲の障害物をレーダー装置を用いて検出し、検出した当該障害物と車両との衝突の危険性が高いか否かを判定する衝突予測装置が開発されている。
【0003】
上記のような衝突予測装置の一例が、特許文献1に開示されている。特許文献1に開示される衝突予測装置は、車両周囲の物体をレーダー装置により検出すると共に、車両周囲の画像を撮像する。そして、レーダー装置により検出した物体が自車両と衝突する可能性のある障害物であるか否かを、撮像した画像を画像処理することによって判定する。このような画像処理を実行することによって、特許文献1に開示される衝突予測装置は、自車両と衝突する危険性の無い物体を障害物として誤認識することを防ぎ、誤った衝突予測を防止する。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2009−25932号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
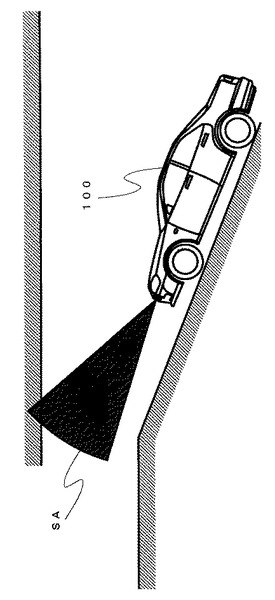
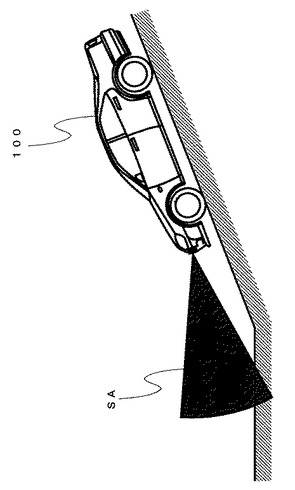
上記のような衝突予測装置を搭載した車両400が、図5に示すように勾配路を登坂走行している場合、レーダー装置が、実際には車両と衝突する危険性の無い天井や看板、高架橋等の路面上方に存在する物体を障害物として検出してしまう場合がある。図5は、車両400がスロープを登坂している様子を示す図である。図5においてSAはレーダー装置が物体を検知する領域を示す。また、同様に、車両が図6に示すように勾配路を降坂走行している場合、レーダー装置が、実際には車両と衝突する危険性の無い路面を障害物として検出してしまう場合がある。図6は、車両がスロープを降坂している様子を示す図である。上記特許文献1に係る衝突予測装置によれば、これらの実際に車両と衝突する危険性の無い物体を画像処理によって車両との衝突判定の対象から除外し、衝突の誤判定を抑制することができる。
【0006】
しかしながら、上記特許文献1に開示される衝突予測装置は、画像を撮像するための撮像装置を車両に搭載する必要がある。また、画像処理を行うことにより処理装置の処理量が大幅に増加するため、処理装置には、より高い処理能力、および、より大きな記憶容量が要求される。すなわち、衝突判定の精度向上のために装置を構成するコストが高くなってしまう問題があった。
【0007】
本発明は上記の課題を鑑みて成されたものであり、低コストで精度の高い衝突予測を可能とする衝突予測装置を提供することを目的とする。
【課題を解決するための手段】
【0008】
上記の課題を解決するため、本願は以下の構成を採用した。すなわち、第1の発明は、車両に搭載され、当該車両と障害物との衝突を予測する衝突予測装置であって、車両の周囲に電磁波を送信し、障害物から反射された当該電磁波の反射波を受信することによって当該障害物を検出する障害物検出手段と、障害物が検出された場合、車両と障害物との衝突の危険性が高いか否かを判定する衝突判定手段と、高さの異なるフロアを往来するためのスロープを備えた建築造成物内において当該スロープ上を車両が走行している可能性が高いか否かを判定するスロープ走行判定手段と、車両がスロープを走行している可能性が高いと判定された場合、衝突判定手段の判定感度を車両がスロープを走行している可能性が高いと判定されていない場合に比べて低減する感度変更手段とを備える、衝突予測装置である。
【0009】
第2の発明は、第1の発明において、車両の周囲の地図情報、および当該地図情報における当該車両の現在地情報を取得するナビゲーション手段をさらに備え、スロープ走行判定手段は、車両がスロープを走行している可能性が高いか否かを少なくとも地図情報および現在地情報に基づいて判定することを特徴とする。
【0010】
第3の発明は、第2の発明において、建築造成物は少なくとも駐車場を含み、スロープ走行判定手段は、車両が駐車場の内部を走行しているか否かを地図情報および現在地情報に基づいて判定する駐車場走行判定手段と、車両が駐車場内を走行していると判定された場合、車両がスロープを走行している可能性が高いと判定する総合判定手段とを含むことを特徴とする。
【0011】
第4の発明は、第3の発明において、地図情報は、駐車場内部の地図情報を示す駐車場地図情報を含み、駐車場地図情報は、少なくとも駐車場内部におけるスロープの位置情報を含み、スロープ走行判定手段は、車両が駐車場内部においてスロープを走行しているか否かを現在地情報、および当該駐車場内部の地図情報を示す駐車場地図情報に基づいて判定する詳細走行位置判定手段をさらに含み、総合判定手段は、駐車場走行判定手段により車両が駐車場内を走行していると判定され、且つ詳細走行位置判定手段により車両が当該駐車場内部においてスロープを走行していると判定された場合、車両がスロープを走行している可能性が高いと判定することを特徴とする。
【0012】
第5の発明は、第4の発明において、車両の車体のピッチ方向の傾斜角を検出する傾斜角検出手段と、傾斜角が予め定められた閾値と比較することにより車両の車体がピッチ方向に傾いているか否かを判定する姿勢判定手段とをさらに備え、総合判定手段は、駐車場走行判定手段により車両が駐車場内を走行していると判定され、且つ詳細走行位置判定手段により車両が当該駐車場内部においてスロープを走行していないと判定され、且つ車両の車体がピッチ方向に傾いていると判定された場合、車両がスロープを走行している可能性が高いと判定することを特徴とする。
【0013】
第6の発明は、第1の発明および第5の発明の何れか1つにおいて、障害物検出手段は、反射波の受信強度が予め定められた検出閾値以上である場合、障害物を検出し、感度変更手段は、車両がスロープを走行している可能性が高いと判定された場合、検出閾値を車両がスロープを走行している可能性が高いと判定されていない場合に比べて大きくすることによって、衝突判定手段の判定感度を低減することを特徴とする。
【0014】
第7の発明は、第1の発明および第5の発明の何れか1つにおいて、衝突判定手段は、障害物と車両とが衝突するまでに要すると予想される衝突予想時間を算出し、当該衝突予想時間が予め定められた衝突判定閾値以下である場合、車両と障害物との衝突の危険性が高いか否かを判定し、感度変更手段は、車両がスロープを走行している可能性が高いと判定された場合、衝突判定閾値を車両がスロープを走行している可能性が高いと判定されていない場合に比べて小さくすることによって、衝突判定手段の判定感度を低減することを特徴とする。
【0015】
第8の発明は、第1の発明および第5の発明の何れか1つにおいて、障害物検出手段が送信する電磁波の強度を変更する電磁波強度制御手段をさらに備え、感度変更手段は、車両がスロープを走行している可能性が高いと判定された場合、電磁波の強度を車両がスロープを走行している可能性が高いと判定されていない場合に比べて小さくすることによって、衝突判定手段の判定感度を低減することを特徴とする。
【0016】
第9の発明は、第1の発明および第5の発明の何れか1つにおいて、感度変更手段は、車両がスロープを走行している可能性が高いと判定された場合、衝突判定手段による判定を停止することによって衝突判定手段の判定感度を低減することを特徴とする。
【発明の効果】
【0017】
第1の発明によれば、車両と障害物との衝突を低コスト且つ高い精度で予測することができる。具体的には、車両がスロープを走行している可能性が高い状況下、すなわち路面や天井等を障害物として誤検出し易い状況下においては、衝突判定の感度が低減される。そのため、実際には車両と障害物との衝突の危険性が比較的低いにも拘わらず衝突の危険性が高いと誤った判定をし易い状況下において、当該誤った判定をし難くすることができる。
【0018】
第2の発明によれば、車両がスロープを走行している可能性が高いか否かを、例えばナビゲーション装置などから得られる各種情報に基づいて容易に判定することができる。すなわち、車両がスロープを走行している可能性が高いか否かを簡単な処理、および広く普及している構成品により容易に判定することができる。
【0019】
第3の発明によれば、一般的にスロープが備えられている可能性が高いとされる駐車場内を車両が走行している場合、車両がスロープを走行している可能性が高いと判定することができる。
【0020】
第4の発明によれば、駐車場のスロープを車両が走行している状況下、すなわち、特に路面や天井を障害物として誤検出し易い状況下においてのみ、衝突判定の感度を低減することができる。言い換えれば、駐車場内であっても、車両がスロープでない領域を走行している場合は衝突判定の感度を鈍らせることなく衝突判定を実行することができる。
【0021】
第5の発明によれば、スロープを走行している可能性が高いか否かをナビゲーション装置等により得られる情報だけでなく、車両の傾斜角に基づいて判定することによって、車両がスロープを走行している可能性が高いか否かを、より正確にに判定することができる。特に、車両が駐車場内でスロープを走行しているか否かをナビゲーション装置等により得られる地図情報のみでは正確に判定することが困難な状況において、当該判定を正確に行うことが可能であり、効果的である。
【0022】
第6の発明によれば、障害物を検出したか否かを判定するための閾値を制御することによって、障害物を検出し難くすることができる。したがって、障害物と車両との衝突判定の実行を抑制し、車両と障害物とが衝突する危険性が高いと判定し難くすることができる。
【0023】
第7の発明によれば、車両と障害物との衝突の危険性を判定するための閾値を制御することによって、当該衝突の危険性が高いと判定し難くすることができる。すなわち、簡単な処理で衝突判定の感度を鈍くすることができる。
【0024】
第8の発明によれば、障害物の検出のために送受信する電磁波の強度を低減することによって、障害物を検出し難くすることができる。したがって、障害物と車両との衝突判定の実行を抑制し、車両と障害物とが衝突する危険性が高いと判定し難くすることができる。
【0025】
第9の発明によれば、障害物を検出するための電磁波が路面や天井等を障害物として誤検出し易い状況下において、車両と障害物との衝突判定の実行を禁止することができる。したがって、簡単な処理で車両と障害物とが衝突する危険性が高いと判定し難くすることができる。
【図面の簡単な説明】
【0026】
【図1】第1の実施形態に係る衝突予測装置1の構成を示すブロック図の一例
【図2】第1の実施形態に係る衝突判定ECU20が実行する処理の詳細を示すフローチャートの一例
【図3】第1の実施形態に係るスロープ走行判定処理の詳細を示すフローチャートの一例
【図4】第2の実施形態に係る衝突判定ECU20が実行する処理の詳細を示すフローチャートの一例
【図5】第3の実施形態に係る衝突判定ECU20が実行する処理の詳細を示すフローチャートの一例
【図6】第4の実施形態に係る衝突判定ECU20が実行する処理の詳細を示すフローチャートの一例
【図7】車両がスロープを登坂している様子を示す図
【図8】車両がスロープを降坂している様子を示す図
【発明を実施するための形態】
【0027】
(第1の実施形態)
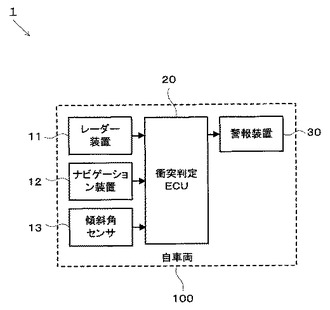
以下、本発明の第1の実施形態に係る衝突予測装置1について説明する。先ず、図1を参照して衝突予測装置1のハードウェア構成について説明する。なお、図1は、衝突予測装置1の構成を示すブロック図の一例である。図1に示すように。衝突予測装置1は、レーダー装置11、ナビゲーション装置12、傾斜角センサ13、衝突判定ECU20、および警報装置30を備える。なお、本実施形態においては、衝突予測装置1が自車両100に搭載される例について説明する。
【0028】
レーダー装置11は、自車両100の周囲に存在する障害物を検出する装置である。レーダー装置11は、自車両100の周囲に電磁波を送信し、当該電磁波が物体から反射して成る反射波を受信することによって当該物体を障害物として検出する。レーダー装置11は、電磁波の送受信アンテナ、A/D変換回路、情報処理装置、メモリなどの記憶装置等を備える。なお、本実施形態においては、レーダー装置11が、自車両100の前端に搭載され、自車両100の前方に存在する障害物を検出する例について説明する。レーダー装置11は、例えば、自車両100のフロントグリル内やフロントバンパ内等に搭載される。
【0029】
レーダー装置11は、電磁波の反射波を受信し、当該反射波の受信強度Eを検出する。そして、レーダー装置11は、反射波の受信強度Eの値がレーダー検出閾値Eth以上である場合、障害物を検出したと判定する。レーダー検出閾値Ethは、レーダー装置11が障害物を検出したか否かを判定するための閾値である。レーダー検出閾値Ethは、予めレーダー装置11の記憶装置に記憶される任意の定数である。
【0030】
レーダー装置11は、障害物を検出すると反射波の位相や周波数等の情報に基づいて当該障害物の位置や移動に関する情報を検出する。なお、以下では、レーダー装置11により検出された障害物を検出物と呼称する。具体的には、レーダー装置11は、障害物の移動情報として、当該の自車両100に対する検出物の相対速度VR(km/h)、および当該検出物から自車両100までの相対距離L(km)を検出する。そして、レーダー装置11は、相対速度VRおよび相対距離Lを示すデータを衝突判定ECU20へ送信する。なお、以下では、相対速度VRおよび相対距離Lを総称して検出物情報と呼称する。また、レーダー装置11が相対速度VRおよび相対距離Lを反射波の位相や周波数等の情報に基づいて検出する方法は、従来周知の任意の手法を用いるものとし、詳細な説明を省略する。
【0031】
ナビゲーション装置12は、地図情報を予め記憶し、自車両100の当該地図上における現在地を特定する装置である。ナビゲーション装置12は、地図情報において自車両100が現在走行している地点を示す現在地情報、および当該地点周辺の地図情報を衝突判定ECU20へ送信する。地図情報には、自車両100周辺の道路、店舗、駐車場等の位置情報が含まれる。また、ナビゲーション装置12は、地図情報として記憶されている駐車場のうち、一部のものについては、当該駐車場内部の詳細な地図(以下、駐車場地図情報と呼称する)を予め記憶する。ナビゲーション装置12は、自車両100が現在、走行している駐車場の駐車場地図情報を記憶している場合には、上記の地図情報に駐車場地図情報を付加して衝突判定ECU20へ送信する。なお、駐車場地図情報には、例えば、駐車場内のスロープ、駐車スペース、柱、および出入口の位置情報が含まれる。なお、ナビゲーション装置12が自車両100が地図上の何処を走行しているかを判別する手法としては、従来周知の技術を用いて構わない。例えば、ナビゲーション装置12は、GPS(Global Positioning System)等の位置測定システムを用いて自車両100の位置を特定する。また、上記ではナビゲーション装置12が、地図情報を予め記憶している例について説明したが、ナビゲーション装置12は、外部のサーバー等と通信することによって、地図情報を当該サーバーから随時取得して構わない。
【0032】
傾斜角センサ13は、自車両100の車体のピッチ方向の傾斜角ωを検出するセンサ装置である。傾斜角ωの値は、例えば、自車両100の車体が水平である場合に0になり、自車両100の車体が前傾するほどに小さな値に、自車両100の車体が後傾するほどに大きな値になる。傾斜角センサ13は、検出した傾斜角ωを衝突判定ECU20へ出力する。傾斜角センサ13は、自車両100に生ずる加速度の作用方向を検出し、当該作用方向に基づいて傾斜角ωを算出する。なお、傾斜角センサ13が傾斜角ωを検出する手法は従来周知の手法を用いて良い。例えば、傾斜角センサ13は、ジャイロセンサ等の周知の角度センサであっても良い。
【0033】
衝突判定ECU20は、典型的には、CPU(Central Processing Unit:中央処理装置)などの情報処理装置、メモリなどの記憶装置、およびインターフェース回路などを備える制御装置である。衝突判定ECU20は、レーダー装置11、ナビゲーション装置12から取得したデータに基づいて、自車両100と障害物とが衝突する危険性が高いか否か判定する。また、衝突判定ECU20は、自車両100と障害物とが衝突する危険性が高いと判定した場合、警報装置30を動作させる指示信号を警報装置30に送信する。なお、衝突判定ECU20の詳細な処理については後述する。
【0034】
警報装置30は、自車両100のドライバーに対して、自車両100と障害物とが衝突する危険性が高い状況であることを報知する装置である。警報装置30は、衝突判定ECU20から受信する指示信号に応じて、警報を報知する。警報装置30は、典型的には、自車両100の車室内に備えられた音声出力装置である。警報装置30は、警報音を出力することによって、衝突の危険性をドライバーに報知する。
【0035】
なお、音声出力装置によって警報音を出力する以外にも、他の任意のデバイスを警報装置30として用いて衝突の危険性をドライバーに報知して構わない。例えば、警報装置30として、自車両100の車室内に搭載された表示装置を用いても良い。警報装置30として表示装置を用いる場合、衝突の危険性を示す画像を表示画面に表示させるなどして衝突の危険性をドライバーに報知する。
【0036】
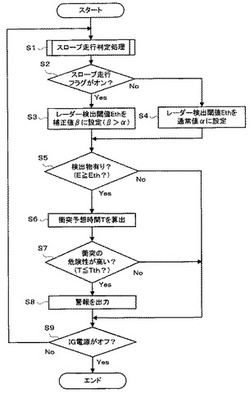
次いで、図2を参照して、衝突判定ECU20が実行する処理について説明する。図2は、衝突判定ECU20が実行する処理の詳細を示すフローチャートの一例である。衝突判定ECU20は、例えば、自車両100のIG電源がオンに設定された場合に、図2のフローチャートの処理を開始する。衝突判定ECU20は、図2のフローチャートの処理を開始すると、先ず、ステップS1の処理を実行する。
【0037】
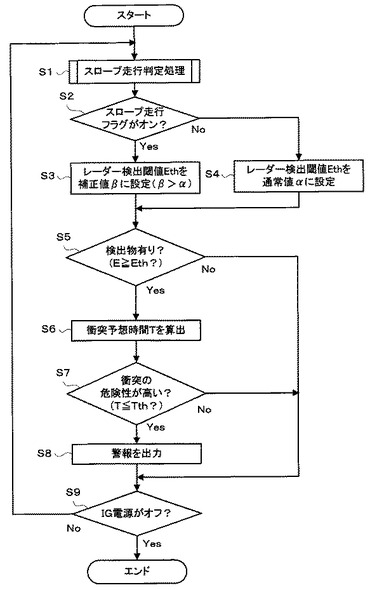
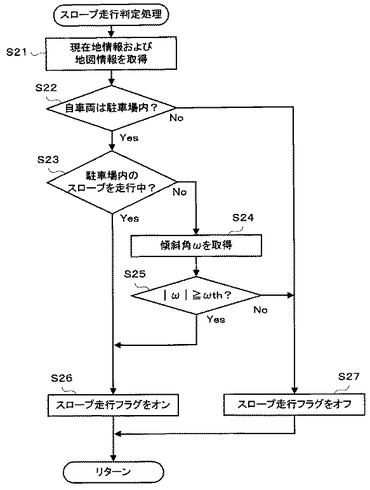
ステップS1において、衝突判定ECU20は、スロープ走行判定処理を実行する。スロープ走行判定処理は、自車両100が、高さの異なるフロアを往来するためのスロープを備えた建築造成物内において当該スロープ上を走行している可能性が高いか否か推定判断する処理である。以下、図3を参照してスロープ走行判定処理の詳細について説明する。なお、図3はスロープ走行判定処理の詳細を示すフローチャートの一例である。衝突判定ECU20は、図3の処理を開始すると、先ず、ステップS21の処理を実行する。
【0038】
ステップS21において、衝突判定ECU20は、現在地情報および周辺地図情報を取得する。具体的には、衝突判定ECU20は、ナビゲーション装置12から送信される現在地情報および周辺地図情報を受信する。衝突判定ECU20は、ステップS21の処理を完了すると、処理をステップS22へ進める。
【0039】
ステップS22において、衝突判定ECU20は、自車両100が駐車場内を走行しているか否か判定する。具体的には、衝突判定ECU20は、自車両100の現在地が地図情報において駐車場を示す領域内に位置しているか否かをステップS21で取得した現在地情報および地図情報に基づいて判断する。衝突判定ECU20は、自車両100が駐車場内を走行していると判定した場合、処理をステップS23へ進める。一方、衝突判定ECU20は、自車両100が駐車場内を走行していないと判定した場合、処理をステップS27へ進める。
【0040】
例えば、自走式立体駐車場内など、上下方向に複数の階層を有する建築構造物にはスロープが備えられている可能性が高いと考えられる。そのため、自車両100が駐車場内を走行している際は、レーダー装置11が、自車両100と衝突する危険が無い物体を障害物として誤検出し易いと考えられる。そして、自車両100と衝突する危険が無い物体を障害物として誤検出した場合、衝突判定ECU20は、自車両100と障害物との衝突の危険性を誤って判定してしまうおそれがある。すなわち、上記ステップS22の処理によれば、自車両100が、衝突の危険性を誤判定し易い環境下を走行しているか否かをナビゲーション装置12の情報に基づいて容易且つ正確に判定することができるのである。
【0041】
ステップS23において、衝突判定ECU20は、自車両100が駐車場内のスロープを走行中か否か判定する。具体的には、衝突判定ECU20は、ステップS21において受信した地図情報に駐車場地図情報が付加されている場合、自車両100の現在地が当該駐車場地図情報中においてスロープを示す領域内に位置しているか否かを、駐車場地図情報および現在地情報に基づいて判断する。衝突判定ECU20は、自車両100の現在地が当該駐車場地図情報中においてスロープを示す領域内に位置している場合、自車両100が駐車場内のスロープを走行中であると判定し、処理をステップS26へ進める。一方、衝突判定ECU20は、自車両100の現在地が当該駐車場地図情報中においてスロープを示す領域内に位置していない場合、および、地図情報に駐車場地図情報が付加されていなかった場合、自車両100が駐車場内のスロープを走行中で処理をステップS24へ進める。
【0042】
上記ステップS23の処理によれば、衝突判定ECU20は、駐車場地図情報および現在地情報に基づいて駐車場内における車両の詳細な走行位置を判別し、自車両100が駐車場に備えられたスロープを自車両100が走行しているか否かを容易、且つ正確に判定することができる。
【0043】
ステップS24において、衝突判定ECU20は、傾斜角ωを取得する。具体的には、傾斜角センサ13から傾斜角ωの値を示すデータを受信し、記憶装置に記憶する。衝突判定ECU20は、ステップS24の処理を完了すると、処理をステップS25へ進める。
【0044】
ステップS25において、衝突判定ECU20は、傾斜角ωの絶対値が傾斜角閾値ωth以上であるか否か判定する。傾斜角閾値ωthは、自車両100の車体が所定量以上前傾、または後傾しているか否かを判定するための閾値である。傾斜角閾値ωthは、衝突判定ECU20の記憶装置に予め記憶された任意の定数である。衝突判定ECU20は、傾斜角ωの絶対値が傾斜角閾値ωth以上であると判定した場合、処理をステップS26へ進める。一方、衝突判定ECU20は、傾斜角ωの絶対値が傾斜角閾値ωth以上でないと判定した場合、処理をステップS27へ進める。
【0045】
ステップS26において、衝突判定ECU20は、スロープ走行フラグをオンに設定する。スロープ走行フラグは、自車両100がスロープを走行しているか否かの推定結果を表すフラグデータである。スロープ走行フラグは、衝突判定ECU20によってオンまたはオフの何れかの状態に設定される。スロープ走行フラグがオンに設定されている場合、自車両100がスロープを走行していると推定されたことが示される。一方、スロープ走行フラグがオフに設定されている場合、自車両100がスロープを走行していないと推定されたことが示される。本ステップにおいて、衝突判定ECU20は、スロープ走行フラグをオンに設定し、当該フラグの状態を記憶装置に記憶する。衝突判定ECU20は、ステップS26の処理を完了すると、スロープ走行判定処理を完了し、処理を図2のステップS2へ進める。
【0046】
ステップS27において、衝突判定ECU20は、スロープ走行フラグをオフに設定する。衝突判定ECU20は、スロープ走行フラグをオフに設定し、当該フラグの状態を記憶装置に記憶する。衝突判定ECU20は、ステップS27の処理を完了すると、スロープ走行判定処理を完了し、処理を図2のステップS2へ進める。
【0047】
上記スロープ走行判定処理によれば、自車両100がスロープを走行している可能性が高いか否かが、ナビゲーション装置12により取得された駐車場地図情報に基づいて判定される。また、自車両100がスロープを走行していないと駐車場地図情報に基づいて判定された場合、または駐車場地図情報が地図情報に含まれておらず、スロープを走行しているか否か判定できない場合は、自車両100がスロープを走行しているか否かが傾斜角ωに応じて判定される。すなわち、衝突判定ECU20は、自車両100が駐車場内においてスロープを走行している可能性が高いか否かを容易且つ正確に判定することができる。
【0048】
図2の説明に戻り、ステップS2において、衝突判定ECU20は、スロープ走行フラグがオンに設定されているか否か判定する。具体的には、衝突判定ECU20は、記憶装置に記憶されたスロープ走行フラグの状態を読み出し、当該状態がオンまたはオフの何れであるか判定する。衝突判定ECU20は、スロープ走行フラグがオンに設定されていると判定した場合、処理をステップS3へ進める。一方、衝突判定ECU20は、スロープ走行フラグがオフに設定されていると判定した場合、処理をステップS4へ進める。
【0049】
ステップS3において、衝突判定ECU20は、レーダー検出閾値Ethを補正値βに設定する。補正値βは、衝突判定ECU20の記憶装置に予め記憶された定数である。衝突判定ECU20は、レーダー検出閾値Ethを補正値βに設定する指示信号をレーダー装置11へ送信する。衝突判定ECU20は、ステップS3の処理を完了すると、処理をステップS5へ進める。
【0050】
ステップS4において、衝突判定ECU20は、レーダー検出閾値Ethを通常値αに設定する。通常値αは、衝突判定ECU20の記憶装置に予め記憶された、補正値βより小さい定数である。衝突判定ECU20は、レーダー検出閾値Ethを通常値αに設定する指示信号をレーダー装置11へ送信する。衝突判定ECU20は、ステップS4の処理を完了すると、処理をステップS5へ進める。
【0051】
ステップS5において、衝突判定ECU20は、検出物が有るか否か判定する。具体的には、衝突判定ECU20は、レーダー装置11から検出物情報を受信しているか否か判定する。なお、上述の通り、レーダー装置11は、受信強度Eの値がレーダー検出閾値Eth以上である場合に検出物情報を衝突判定ECU20へ送信する。衝突判定ECU20は、検出物情報を受信している場合、検出物が有ると判定し、処理をステップS6へ進める。一方、衝突判定ECU20は、検出物情報を受信していない場合、検出物が無いと判定し、処理をステップS9へ進める。
【0052】
上記ステップS2からステップS5の処理によれば、自車両100がスロープを走行している可能性が高い場合、レーダー検出閾値Ethの値が、自車両100がスロープを走行している可能性が高いと判定されていない場合に比べて大きな値(補正値β)に補正される。したがって、自車両100がスロープを走行している可能性が高い場合、自車両100がスロープを走行している可能性が低い場合に比べてレーダー装置11の障害物検出の感度が鈍くなる。そのため、自車両100がスロープを走行している可能性が高い場合、レーダー装置11により障害物が検出され難くなり、検出物と自車両100との衝突判定処理(後述ステップS7)が実行され難くなる。その結果、検出物と自車両100とが衝突する危険性が高いと判定され難くなる。すなわち、上述の処理によれば、衝突判定ECU20は、簡単な処理で自車両100と検出物とが衝突する危険性が高いとする衝突判定の感度を鈍くすることができる。
【0053】
ステップS6において、衝突判定ECU20は、衝突予想時間Tを算出する。衝突予想時間Tは、検出物が自車両100に衝突するまでに要すると予想される時間である。衝突判定ECU20は、レーダー装置11から受信した検出物情報および式(1)に基づいて衝突予想時間Tを算出し、当該衝突予想時間Tの値を自身の記憶装置に記憶する。
T=L/VR …(1)
衝突判定ECU20は、ステップS6の処理を完了すると、処理をステップS7へ進める。
【0054】
ステップS7において、衝突判定ECU20は、衝突の危険性が高いか否か判定する。具体的には、衝突判定ECU20は、衝突予想時間Tの値が衝突判定閾値Tth以下であるか否か判定する。衝突判定閾値Tthは、検出物と自車両100とが衝突する危険性が高いか否かを判定するための閾値である。衝突判定閾値Tthは、衝突判定ECU20の記憶装置に予め記憶された任意の定数である。衝突判定ECU20は、衝突予想時間Tの値が衝突判定閾値Tth以下である場合、自車両100と検出物とが衝突する危険性が高いと判定し、処理をステップS8へ進める。一方、衝突判定ECU20は、衝突予想時間Tの値が衝突判定閾値Tthより大きい場合、自車両100と検出物とが衝突する危険性が低いと判定し、処理をステップS9へ進める。
【0055】
ステップS8において、衝突判定ECU20は、警報を出力する。具体的には、衝突判定ECU20は、警報装置30へ警報を報知する指示信号を出力する。衝突判定ECU20は、ステップS8の処理を完了すると、処理をステップS9へ進める。
【0056】
ステップS9において、衝突判定ECU20は、IG電源がオフに設定されたか否か判定する。衝突判定ECU20は、IG電源がオフに設定された判定した場合、図2の処理を終了する。一方、衝突判定ECU20は、IG電源がオフに設定されていないと判定した場合、処理をステップS1へ戻し、上述の各ステップの処理をループして繰り返し実行する。
【0057】
以上に述べた通り、本発明の第1の実施形態に係る衝突予測装置1によれば、自車両100がスロープを走行している可能性が高い状況下、すなわち路面や天井等を障害物として誤検出し易い状況下においては、衝突判定の感度を低減させて、自車両100と検出物との衝突の誤判定を抑制することができる。
【0058】
自車両100が障害物と衝突する危険性が高いと誤判定された場合には、警報装置30による不要な警報が報知され、ドライバーが煩わしさを感じる場合があるが、衝突予測装置1によれば上記の通り誤判定が抑制されるため、ドライバーが煩わしさを感じることを防ぐことができる。
【0059】
また、上記の通り、衝突予測装置1は、多くの車両に搭載されているハードウェアを利用して構成することができる。すなわち、衝突予測装置1によれば、自車両100と障害物との衝突を低コスト且つ高い精度で予測可能である。
【0060】
(第2の実施形態)
上記第1の実施形態では、衝突判定ECU20がレーダー装置11の障害物検出の感度をスロープ走行フラグのオン/オフ状態に応じて鈍くすることによって検出物と自車両100との衝突判定の感度を鈍くする例について説明したが、衝突判定ECU20は、スロープ走行フラグのオン/オフ状態に応じて衝突判定を停止することによって、検出物と自車両100との衝突判定の感度を鈍くしても構わない。以下、第2の実施形態に係る衝突予測装置について説明する。第2の実施形態に係る衝突予測装置のハードウェア構成は、第1の実施形態に係る衝突予測装置1の構成と同様であるため、詳細な説明は省略する(図1参照)。
【0061】
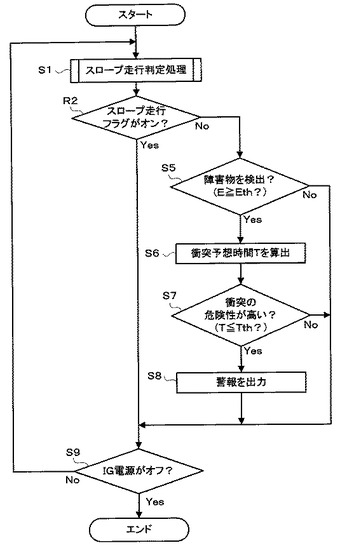
以下、第2の実施形態に係る衝突判定ECU20の処理について図4を参照して説明する。図4は、第2の実施形態に係る衝突判定ECU20が実行する処理の詳細を示したフローチャートの一例である。第2の実施形態に係る衝突判定ECU20は、図2のステップS2の処理に替えて、ステップR2の処理を実行する。図4において、上述第1の実施形態に示した処理と同様の処理を実行するステップについては同様の符号を付し、詳細な説明を省略する。
【0062】
ステップR2において、衝突判定ECU20は、上述ステップS2と同様にしてスロープ走行フラグがオンに設定されているか否か判定する。但し、衝突判定ECU20は、ステップR2においては、スロープ走行フラグがオンに設定されていると判定した場合、処理をステップS9へ進める。また、衝突判定ECU20は、スロープ走行フラグがオフに設定されていると判定した場合、処理をステップS5へ進める。
【0063】
上記のような第2の実施形態に係る衝突判定ECU20の処理によれば、第1の実施形態に係る衝突判定ECU20が実行する処理よりも簡単な処理で自車両100と検出物とが衝突する危険性が高いと判定し難くすることができる。すなわち、第2の実施形態に係る衝突予測装置によれば、第1の実施形態に係る衝突予測装置と同様に自車両100と障害物との衝突を低コスト且つ高い精度で予測可能である。
【0064】
(第3の実施形態)
上記第1の実施形態では、衝突判定ECU20がレーダー装置11の障害物検出の感度をスロープ走行フラグのオン/オフ状態に応じて鈍くすることによって検出物と自車両100との衝突判定の感度を変更する例について説明したが、衝突判定ECU20は、スロープ走行フラグのオン/オフ状態に応じて衝突判定閾値Tthの値を変更することによって、衝突判定の感度を変更しても構わない。以下、第3の実施形態に係る衝突予測装置について説明する。第3の実施形態に係る衝突予測装置のハードウェア構成は、第1の実施形態に係る衝突予測装置1の構成と同様であるため、詳細な説明は省略する(図1参照)。
【0065】
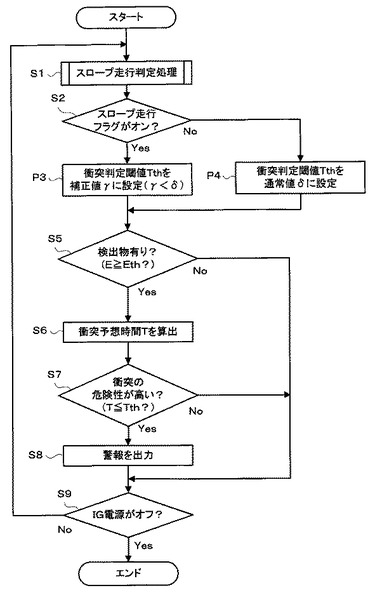
以下、第3の実施形態に係る衝突判定ECU20の処理について図5を参照して説明する。図5は、第3の実施形態に係る衝突判定ECU20が実行する処理の詳細を示したフローチャートの一例である。第3の実施形態に係る衝突判定ECU20は、図2のステップS3の処理に替えて、ステップP3の処理を実行する。また、第3の実施形態に係る衝突判定ECU20は、図2のステップS4の処理に替えて、ステップP4の処理を実行する。なお、図5において、上述第1の実施形態に示した処理と同様の処理を実行するステップについては同様の符号を付し、詳細な説明を省略する。
【0066】
ステップP3において、衝突判定ECU20は、衝突判定閾値Tthを補正値γに設定する。補正値γは、衝突判定ECU20の記憶装置に予め記憶された定数である。衝突判定ECU20は、衝突判定閾値Tthを補正値γに設定する指示信号をレーダー装置11へ送信する。衝突判定ECU20は、ステップP3の処理を完了すると、処理をステップS5へ進める。
【0067】
ステップP4において、衝突判定ECU20は、衝突判定閾値Tthを通常値δに設定する。通常値δは、衝突判定ECU20の記憶装置に予め記憶された、補正値γより小さい定数である。衝突判定ECU20は、衝突判定閾値Tthを通常値δに設定する指示信号をレーダー装置11へ送信する。衝突判定ECU20は、ステップP4の処理を完了すると、処理をステップS5へ進める。
【0068】
上記ステップP3およびステップP4の処理によれば、自車両100がスロープを走行している可能性が高い場合、衝突判定閾値Tthの値が、自車両100がスロープを走行している可能性が低い場合に比べて小さな値に補正される。したがって、検出物と自車両100との相対的な位置関係や移動情報が同様であったとしても、自車両100がスロープを走行している可能性が高い場合には、スロープを走行している可能性が低い場合に比べて検出物と自車両100とが衝突する危険性が高いと判定され難くなる。
【0069】
以上の通り、第3の実施形態に係る衝突予測装置によれば、第1の実施形態に係る衝突予測装置と同様に自車両100と障害物との衝突を低コスト且つ高い精度で予測可能である。また、上記のような第3の実施形態に係る衝突判定ECU20の処理によれば、レーダー装置11と衝突判定ECU20とが設定値変更のための通信を行うことなく、少ない処理で衝突判定の感度を低減することができる。
【0070】
(第4の実施形態)
上記第1の実施形態では、衝突判定ECU20がレーダー検出閾値Ethの値をスロープ走行フラグのオン/オフ状態に応じて変更することによってレーダー装置11が障害物を検出する感度を鈍くする例について説明したが、衝突判定ECU20は、レーダー装置11が送信する電磁波の強度(以下、送信電磁波強度Mと呼称する。)を変更することによって、レーダー装置11が障害物を検出する感度を鈍くしても構わない。以下、第4の実施形態に係る衝突予測装置について説明する。第4の実施形態に係る衝突予測装置のハードウェア構成は、第1の実施形態に係る衝突予測装置1の構成と同様であるため、詳細な説明は省略する(図1参照)。
【0071】
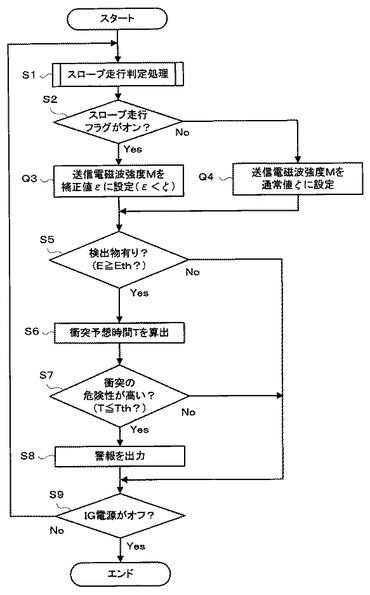
以下、第4の実施形態に係る衝突判定ECU20の処理について図6を参照して説明する。図6は、第4の実施形態に係る衝突判定ECU20が実行する処理の詳細を示したフローチャートの一例である。第4の実施形態に係る衝突判定ECU20は、図2のステップS3の処理に替えて、ステップQ3の処理を実行する。また、第4の実施形態に係る衝突判定ECU20は、図2のステップS4の処理に替えて、ステップQ4の処理を実行する。なお、図6において、上述第1の実施形態に示した処理と同様の処理を実行するステップについては同様の符号を付し、詳細な説明を省略する。
【0072】
ステップQ3において、衝突判定ECU20は、送信電磁波強度Mを補正値εに設定する。補正値εは、衝突判定ECU20の記憶装置に予め記憶された定数である。衝突判定ECU20は、送信電磁波強度Mを補正値εに設定する指示信号をレーダー装置11へ送信する。衝突判定ECU20は、ステップQ3の処理を完了すると、処理をステップS5へ進める。
【0073】
ステップQ4において、衝突判定ECU20は、送信電磁波強度Mを通常値ζに設定する。通常値ζは、衝突判定ECU20の記憶装置に予め記憶された、補正値εより大きい定数である。衝突判定ECU20は、送信電磁波強度Mを通常値ζに設定する指示信号をレーダー装置11へ送信する。衝突判定ECU20は、ステップQ4の処理を完了すると、処理をステップS5へ進める。
【0074】
上記ステップQ3およびステップQ4の処理によれば、自車両100がスロープを走行している可能性が高い場合、自車両100がスロープを走行している可能性が低い場合に比べて送信電磁波強度Mの値が小さな値に補正される。したがって、自車両100がスロープを走行している可能性が高い場合には、スロープを走行している可能性が低い場合に比べてレーダー装置11により障害物が検出され難くなる。
【0075】
上記の通り、第4の実施形態に係る衝突予測装置によれば、第1の実施形態と同様に、簡単な処理で自車両100と検出物とが衝突する危険性が高いとする衝突判定の感度を鈍くすることができる。また、第4の実施形態に係る衝突予測装置によれば、自車両100と障害物との衝突を低コスト且つ高い精度で予測することができる。
【0076】
なお、上記各実施形態では、自車両100が駐車場内を走行している場合に自車両100がスロープを走行している可能性が高いと衝突判定ECUが判定する例について説明したが、衝突判定ECU20は、駐車場に限らず、スロープが存在している可能性が高い任意の建築造成物内や敷地内を自車両100が走行している場合に自車両100がスロープを走行している可能性が高いと判定して構わない。
【0077】
また、上記各実施形態では、レーダー装置11が自車両100の前端に搭載される例について説明したが、レーダー装置11は自車両100の任意の位置に搭載されて構わない。例えば、レーダー装置11は、自車両100の後端に搭載され、自車両100の後方に存在する障害物を検出しても構わない。
【0078】
また、上記各実施形態では、衝突判定ECU20が、自車両100が駐車場内であるか否か、および、自車両100が駐車場内のスロープを走行しているか否かを判定する例について説明したが(ステップS21からステップS23)、ナビゲーション装置12が当該判定処理を実行しても構わない。このような場合、自車両100が駐車場内であるか否か、および、自車両100が駐車場内のスロープを走行しているか否かの判定結果を示すデータが、ナビゲーション装置12から衝突判定ECU20へ送信される。そして、衝突判定ECU20は、受信した上記判定結果を示すデータに基づいてスロープ走行フラグのオン/オフ状態を切り替える。このような構成とする場合、衝突判定ECU20に必要とされる記憶領域や処理量を低減することができる。
【産業上の利用可能性】
【0079】
本発明に係る衝突予測装置は、低コストで精度の高い衝突予測を可能とする衝突予測装置などとして有用である。
【符号の説明】
【0080】
1 衝突予測装置
11 レーダー装置
12 ナビゲーション装置
13 傾斜角センサ
20 衝突判定ECU
30 警報装置
100 自車両
【技術分野】
【0001】
本発明は、衝突予測装置に関し、より特定的には、車両に搭載され、当該車両と障害物との衝突を予測する衝突予測装置に関する。
【背景技術】
【0002】
従来、車両周囲の障害物をレーダー装置を用いて検出し、検出した当該障害物と車両との衝突の危険性が高いか否かを判定する衝突予測装置が開発されている。
【0003】
上記のような衝突予測装置の一例が、特許文献1に開示されている。特許文献1に開示される衝突予測装置は、車両周囲の物体をレーダー装置により検出すると共に、車両周囲の画像を撮像する。そして、レーダー装置により検出した物体が自車両と衝突する可能性のある障害物であるか否かを、撮像した画像を画像処理することによって判定する。このような画像処理を実行することによって、特許文献1に開示される衝突予測装置は、自車両と衝突する危険性の無い物体を障害物として誤認識することを防ぎ、誤った衝突予測を防止する。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2009−25932号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
上記のような衝突予測装置を搭載した車両400が、図5に示すように勾配路を登坂走行している場合、レーダー装置が、実際には車両と衝突する危険性の無い天井や看板、高架橋等の路面上方に存在する物体を障害物として検出してしまう場合がある。図5は、車両400がスロープを登坂している様子を示す図である。図5においてSAはレーダー装置が物体を検知する領域を示す。また、同様に、車両が図6に示すように勾配路を降坂走行している場合、レーダー装置が、実際には車両と衝突する危険性の無い路面を障害物として検出してしまう場合がある。図6は、車両がスロープを降坂している様子を示す図である。上記特許文献1に係る衝突予測装置によれば、これらの実際に車両と衝突する危険性の無い物体を画像処理によって車両との衝突判定の対象から除外し、衝突の誤判定を抑制することができる。
【0006】
しかしながら、上記特許文献1に開示される衝突予測装置は、画像を撮像するための撮像装置を車両に搭載する必要がある。また、画像処理を行うことにより処理装置の処理量が大幅に増加するため、処理装置には、より高い処理能力、および、より大きな記憶容量が要求される。すなわち、衝突判定の精度向上のために装置を構成するコストが高くなってしまう問題があった。
【0007】
本発明は上記の課題を鑑みて成されたものであり、低コストで精度の高い衝突予測を可能とする衝突予測装置を提供することを目的とする。
【課題を解決するための手段】
【0008】
上記の課題を解決するため、本願は以下の構成を採用した。すなわち、第1の発明は、車両に搭載され、当該車両と障害物との衝突を予測する衝突予測装置であって、車両の周囲に電磁波を送信し、障害物から反射された当該電磁波の反射波を受信することによって当該障害物を検出する障害物検出手段と、障害物が検出された場合、車両と障害物との衝突の危険性が高いか否かを判定する衝突判定手段と、高さの異なるフロアを往来するためのスロープを備えた建築造成物内において当該スロープ上を車両が走行している可能性が高いか否かを判定するスロープ走行判定手段と、車両がスロープを走行している可能性が高いと判定された場合、衝突判定手段の判定感度を車両がスロープを走行している可能性が高いと判定されていない場合に比べて低減する感度変更手段とを備える、衝突予測装置である。
【0009】
第2の発明は、第1の発明において、車両の周囲の地図情報、および当該地図情報における当該車両の現在地情報を取得するナビゲーション手段をさらに備え、スロープ走行判定手段は、車両がスロープを走行している可能性が高いか否かを少なくとも地図情報および現在地情報に基づいて判定することを特徴とする。
【0010】
第3の発明は、第2の発明において、建築造成物は少なくとも駐車場を含み、スロープ走行判定手段は、車両が駐車場の内部を走行しているか否かを地図情報および現在地情報に基づいて判定する駐車場走行判定手段と、車両が駐車場内を走行していると判定された場合、車両がスロープを走行している可能性が高いと判定する総合判定手段とを含むことを特徴とする。
【0011】
第4の発明は、第3の発明において、地図情報は、駐車場内部の地図情報を示す駐車場地図情報を含み、駐車場地図情報は、少なくとも駐車場内部におけるスロープの位置情報を含み、スロープ走行判定手段は、車両が駐車場内部においてスロープを走行しているか否かを現在地情報、および当該駐車場内部の地図情報を示す駐車場地図情報に基づいて判定する詳細走行位置判定手段をさらに含み、総合判定手段は、駐車場走行判定手段により車両が駐車場内を走行していると判定され、且つ詳細走行位置判定手段により車両が当該駐車場内部においてスロープを走行していると判定された場合、車両がスロープを走行している可能性が高いと判定することを特徴とする。
【0012】
第5の発明は、第4の発明において、車両の車体のピッチ方向の傾斜角を検出する傾斜角検出手段と、傾斜角が予め定められた閾値と比較することにより車両の車体がピッチ方向に傾いているか否かを判定する姿勢判定手段とをさらに備え、総合判定手段は、駐車場走行判定手段により車両が駐車場内を走行していると判定され、且つ詳細走行位置判定手段により車両が当該駐車場内部においてスロープを走行していないと判定され、且つ車両の車体がピッチ方向に傾いていると判定された場合、車両がスロープを走行している可能性が高いと判定することを特徴とする。
【0013】
第6の発明は、第1の発明および第5の発明の何れか1つにおいて、障害物検出手段は、反射波の受信強度が予め定められた検出閾値以上である場合、障害物を検出し、感度変更手段は、車両がスロープを走行している可能性が高いと判定された場合、検出閾値を車両がスロープを走行している可能性が高いと判定されていない場合に比べて大きくすることによって、衝突判定手段の判定感度を低減することを特徴とする。
【0014】
第7の発明は、第1の発明および第5の発明の何れか1つにおいて、衝突判定手段は、障害物と車両とが衝突するまでに要すると予想される衝突予想時間を算出し、当該衝突予想時間が予め定められた衝突判定閾値以下である場合、車両と障害物との衝突の危険性が高いか否かを判定し、感度変更手段は、車両がスロープを走行している可能性が高いと判定された場合、衝突判定閾値を車両がスロープを走行している可能性が高いと判定されていない場合に比べて小さくすることによって、衝突判定手段の判定感度を低減することを特徴とする。
【0015】
第8の発明は、第1の発明および第5の発明の何れか1つにおいて、障害物検出手段が送信する電磁波の強度を変更する電磁波強度制御手段をさらに備え、感度変更手段は、車両がスロープを走行している可能性が高いと判定された場合、電磁波の強度を車両がスロープを走行している可能性が高いと判定されていない場合に比べて小さくすることによって、衝突判定手段の判定感度を低減することを特徴とする。
【0016】
第9の発明は、第1の発明および第5の発明の何れか1つにおいて、感度変更手段は、車両がスロープを走行している可能性が高いと判定された場合、衝突判定手段による判定を停止することによって衝突判定手段の判定感度を低減することを特徴とする。
【発明の効果】
【0017】
第1の発明によれば、車両と障害物との衝突を低コスト且つ高い精度で予測することができる。具体的には、車両がスロープを走行している可能性が高い状況下、すなわち路面や天井等を障害物として誤検出し易い状況下においては、衝突判定の感度が低減される。そのため、実際には車両と障害物との衝突の危険性が比較的低いにも拘わらず衝突の危険性が高いと誤った判定をし易い状況下において、当該誤った判定をし難くすることができる。
【0018】
第2の発明によれば、車両がスロープを走行している可能性が高いか否かを、例えばナビゲーション装置などから得られる各種情報に基づいて容易に判定することができる。すなわち、車両がスロープを走行している可能性が高いか否かを簡単な処理、および広く普及している構成品により容易に判定することができる。
【0019】
第3の発明によれば、一般的にスロープが備えられている可能性が高いとされる駐車場内を車両が走行している場合、車両がスロープを走行している可能性が高いと判定することができる。
【0020】
第4の発明によれば、駐車場のスロープを車両が走行している状況下、すなわち、特に路面や天井を障害物として誤検出し易い状況下においてのみ、衝突判定の感度を低減することができる。言い換えれば、駐車場内であっても、車両がスロープでない領域を走行している場合は衝突判定の感度を鈍らせることなく衝突判定を実行することができる。
【0021】
第5の発明によれば、スロープを走行している可能性が高いか否かをナビゲーション装置等により得られる情報だけでなく、車両の傾斜角に基づいて判定することによって、車両がスロープを走行している可能性が高いか否かを、より正確にに判定することができる。特に、車両が駐車場内でスロープを走行しているか否かをナビゲーション装置等により得られる地図情報のみでは正確に判定することが困難な状況において、当該判定を正確に行うことが可能であり、効果的である。
【0022】
第6の発明によれば、障害物を検出したか否かを判定するための閾値を制御することによって、障害物を検出し難くすることができる。したがって、障害物と車両との衝突判定の実行を抑制し、車両と障害物とが衝突する危険性が高いと判定し難くすることができる。
【0023】
第7の発明によれば、車両と障害物との衝突の危険性を判定するための閾値を制御することによって、当該衝突の危険性が高いと判定し難くすることができる。すなわち、簡単な処理で衝突判定の感度を鈍くすることができる。
【0024】
第8の発明によれば、障害物の検出のために送受信する電磁波の強度を低減することによって、障害物を検出し難くすることができる。したがって、障害物と車両との衝突判定の実行を抑制し、車両と障害物とが衝突する危険性が高いと判定し難くすることができる。
【0025】
第9の発明によれば、障害物を検出するための電磁波が路面や天井等を障害物として誤検出し易い状況下において、車両と障害物との衝突判定の実行を禁止することができる。したがって、簡単な処理で車両と障害物とが衝突する危険性が高いと判定し難くすることができる。
【図面の簡単な説明】
【0026】
【図1】第1の実施形態に係る衝突予測装置1の構成を示すブロック図の一例
【図2】第1の実施形態に係る衝突判定ECU20が実行する処理の詳細を示すフローチャートの一例
【図3】第1の実施形態に係るスロープ走行判定処理の詳細を示すフローチャートの一例
【図4】第2の実施形態に係る衝突判定ECU20が実行する処理の詳細を示すフローチャートの一例
【図5】第3の実施形態に係る衝突判定ECU20が実行する処理の詳細を示すフローチャートの一例
【図6】第4の実施形態に係る衝突判定ECU20が実行する処理の詳細を示すフローチャートの一例
【図7】車両がスロープを登坂している様子を示す図
【図8】車両がスロープを降坂している様子を示す図
【発明を実施するための形態】
【0027】
(第1の実施形態)
以下、本発明の第1の実施形態に係る衝突予測装置1について説明する。先ず、図1を参照して衝突予測装置1のハードウェア構成について説明する。なお、図1は、衝突予測装置1の構成を示すブロック図の一例である。図1に示すように。衝突予測装置1は、レーダー装置11、ナビゲーション装置12、傾斜角センサ13、衝突判定ECU20、および警報装置30を備える。なお、本実施形態においては、衝突予測装置1が自車両100に搭載される例について説明する。
【0028】
レーダー装置11は、自車両100の周囲に存在する障害物を検出する装置である。レーダー装置11は、自車両100の周囲に電磁波を送信し、当該電磁波が物体から反射して成る反射波を受信することによって当該物体を障害物として検出する。レーダー装置11は、電磁波の送受信アンテナ、A/D変換回路、情報処理装置、メモリなどの記憶装置等を備える。なお、本実施形態においては、レーダー装置11が、自車両100の前端に搭載され、自車両100の前方に存在する障害物を検出する例について説明する。レーダー装置11は、例えば、自車両100のフロントグリル内やフロントバンパ内等に搭載される。
【0029】
レーダー装置11は、電磁波の反射波を受信し、当該反射波の受信強度Eを検出する。そして、レーダー装置11は、反射波の受信強度Eの値がレーダー検出閾値Eth以上である場合、障害物を検出したと判定する。レーダー検出閾値Ethは、レーダー装置11が障害物を検出したか否かを判定するための閾値である。レーダー検出閾値Ethは、予めレーダー装置11の記憶装置に記憶される任意の定数である。
【0030】
レーダー装置11は、障害物を検出すると反射波の位相や周波数等の情報に基づいて当該障害物の位置や移動に関する情報を検出する。なお、以下では、レーダー装置11により検出された障害物を検出物と呼称する。具体的には、レーダー装置11は、障害物の移動情報として、当該の自車両100に対する検出物の相対速度VR(km/h)、および当該検出物から自車両100までの相対距離L(km)を検出する。そして、レーダー装置11は、相対速度VRおよび相対距離Lを示すデータを衝突判定ECU20へ送信する。なお、以下では、相対速度VRおよび相対距離Lを総称して検出物情報と呼称する。また、レーダー装置11が相対速度VRおよび相対距離Lを反射波の位相や周波数等の情報に基づいて検出する方法は、従来周知の任意の手法を用いるものとし、詳細な説明を省略する。
【0031】
ナビゲーション装置12は、地図情報を予め記憶し、自車両100の当該地図上における現在地を特定する装置である。ナビゲーション装置12は、地図情報において自車両100が現在走行している地点を示す現在地情報、および当該地点周辺の地図情報を衝突判定ECU20へ送信する。地図情報には、自車両100周辺の道路、店舗、駐車場等の位置情報が含まれる。また、ナビゲーション装置12は、地図情報として記憶されている駐車場のうち、一部のものについては、当該駐車場内部の詳細な地図(以下、駐車場地図情報と呼称する)を予め記憶する。ナビゲーション装置12は、自車両100が現在、走行している駐車場の駐車場地図情報を記憶している場合には、上記の地図情報に駐車場地図情報を付加して衝突判定ECU20へ送信する。なお、駐車場地図情報には、例えば、駐車場内のスロープ、駐車スペース、柱、および出入口の位置情報が含まれる。なお、ナビゲーション装置12が自車両100が地図上の何処を走行しているかを判別する手法としては、従来周知の技術を用いて構わない。例えば、ナビゲーション装置12は、GPS(Global Positioning System)等の位置測定システムを用いて自車両100の位置を特定する。また、上記ではナビゲーション装置12が、地図情報を予め記憶している例について説明したが、ナビゲーション装置12は、外部のサーバー等と通信することによって、地図情報を当該サーバーから随時取得して構わない。
【0032】
傾斜角センサ13は、自車両100の車体のピッチ方向の傾斜角ωを検出するセンサ装置である。傾斜角ωの値は、例えば、自車両100の車体が水平である場合に0になり、自車両100の車体が前傾するほどに小さな値に、自車両100の車体が後傾するほどに大きな値になる。傾斜角センサ13は、検出した傾斜角ωを衝突判定ECU20へ出力する。傾斜角センサ13は、自車両100に生ずる加速度の作用方向を検出し、当該作用方向に基づいて傾斜角ωを算出する。なお、傾斜角センサ13が傾斜角ωを検出する手法は従来周知の手法を用いて良い。例えば、傾斜角センサ13は、ジャイロセンサ等の周知の角度センサであっても良い。
【0033】
衝突判定ECU20は、典型的には、CPU(Central Processing Unit:中央処理装置)などの情報処理装置、メモリなどの記憶装置、およびインターフェース回路などを備える制御装置である。衝突判定ECU20は、レーダー装置11、ナビゲーション装置12から取得したデータに基づいて、自車両100と障害物とが衝突する危険性が高いか否か判定する。また、衝突判定ECU20は、自車両100と障害物とが衝突する危険性が高いと判定した場合、警報装置30を動作させる指示信号を警報装置30に送信する。なお、衝突判定ECU20の詳細な処理については後述する。
【0034】
警報装置30は、自車両100のドライバーに対して、自車両100と障害物とが衝突する危険性が高い状況であることを報知する装置である。警報装置30は、衝突判定ECU20から受信する指示信号に応じて、警報を報知する。警報装置30は、典型的には、自車両100の車室内に備えられた音声出力装置である。警報装置30は、警報音を出力することによって、衝突の危険性をドライバーに報知する。
【0035】
なお、音声出力装置によって警報音を出力する以外にも、他の任意のデバイスを警報装置30として用いて衝突の危険性をドライバーに報知して構わない。例えば、警報装置30として、自車両100の車室内に搭載された表示装置を用いても良い。警報装置30として表示装置を用いる場合、衝突の危険性を示す画像を表示画面に表示させるなどして衝突の危険性をドライバーに報知する。
【0036】
次いで、図2を参照して、衝突判定ECU20が実行する処理について説明する。図2は、衝突判定ECU20が実行する処理の詳細を示すフローチャートの一例である。衝突判定ECU20は、例えば、自車両100のIG電源がオンに設定された場合に、図2のフローチャートの処理を開始する。衝突判定ECU20は、図2のフローチャートの処理を開始すると、先ず、ステップS1の処理を実行する。
【0037】
ステップS1において、衝突判定ECU20は、スロープ走行判定処理を実行する。スロープ走行判定処理は、自車両100が、高さの異なるフロアを往来するためのスロープを備えた建築造成物内において当該スロープ上を走行している可能性が高いか否か推定判断する処理である。以下、図3を参照してスロープ走行判定処理の詳細について説明する。なお、図3はスロープ走行判定処理の詳細を示すフローチャートの一例である。衝突判定ECU20は、図3の処理を開始すると、先ず、ステップS21の処理を実行する。
【0038】
ステップS21において、衝突判定ECU20は、現在地情報および周辺地図情報を取得する。具体的には、衝突判定ECU20は、ナビゲーション装置12から送信される現在地情報および周辺地図情報を受信する。衝突判定ECU20は、ステップS21の処理を完了すると、処理をステップS22へ進める。
【0039】
ステップS22において、衝突判定ECU20は、自車両100が駐車場内を走行しているか否か判定する。具体的には、衝突判定ECU20は、自車両100の現在地が地図情報において駐車場を示す領域内に位置しているか否かをステップS21で取得した現在地情報および地図情報に基づいて判断する。衝突判定ECU20は、自車両100が駐車場内を走行していると判定した場合、処理をステップS23へ進める。一方、衝突判定ECU20は、自車両100が駐車場内を走行していないと判定した場合、処理をステップS27へ進める。
【0040】
例えば、自走式立体駐車場内など、上下方向に複数の階層を有する建築構造物にはスロープが備えられている可能性が高いと考えられる。そのため、自車両100が駐車場内を走行している際は、レーダー装置11が、自車両100と衝突する危険が無い物体を障害物として誤検出し易いと考えられる。そして、自車両100と衝突する危険が無い物体を障害物として誤検出した場合、衝突判定ECU20は、自車両100と障害物との衝突の危険性を誤って判定してしまうおそれがある。すなわち、上記ステップS22の処理によれば、自車両100が、衝突の危険性を誤判定し易い環境下を走行しているか否かをナビゲーション装置12の情報に基づいて容易且つ正確に判定することができるのである。
【0041】
ステップS23において、衝突判定ECU20は、自車両100が駐車場内のスロープを走行中か否か判定する。具体的には、衝突判定ECU20は、ステップS21において受信した地図情報に駐車場地図情報が付加されている場合、自車両100の現在地が当該駐車場地図情報中においてスロープを示す領域内に位置しているか否かを、駐車場地図情報および現在地情報に基づいて判断する。衝突判定ECU20は、自車両100の現在地が当該駐車場地図情報中においてスロープを示す領域内に位置している場合、自車両100が駐車場内のスロープを走行中であると判定し、処理をステップS26へ進める。一方、衝突判定ECU20は、自車両100の現在地が当該駐車場地図情報中においてスロープを示す領域内に位置していない場合、および、地図情報に駐車場地図情報が付加されていなかった場合、自車両100が駐車場内のスロープを走行中で処理をステップS24へ進める。
【0042】
上記ステップS23の処理によれば、衝突判定ECU20は、駐車場地図情報および現在地情報に基づいて駐車場内における車両の詳細な走行位置を判別し、自車両100が駐車場に備えられたスロープを自車両100が走行しているか否かを容易、且つ正確に判定することができる。
【0043】
ステップS24において、衝突判定ECU20は、傾斜角ωを取得する。具体的には、傾斜角センサ13から傾斜角ωの値を示すデータを受信し、記憶装置に記憶する。衝突判定ECU20は、ステップS24の処理を完了すると、処理をステップS25へ進める。
【0044】
ステップS25において、衝突判定ECU20は、傾斜角ωの絶対値が傾斜角閾値ωth以上であるか否か判定する。傾斜角閾値ωthは、自車両100の車体が所定量以上前傾、または後傾しているか否かを判定するための閾値である。傾斜角閾値ωthは、衝突判定ECU20の記憶装置に予め記憶された任意の定数である。衝突判定ECU20は、傾斜角ωの絶対値が傾斜角閾値ωth以上であると判定した場合、処理をステップS26へ進める。一方、衝突判定ECU20は、傾斜角ωの絶対値が傾斜角閾値ωth以上でないと判定した場合、処理をステップS27へ進める。
【0045】
ステップS26において、衝突判定ECU20は、スロープ走行フラグをオンに設定する。スロープ走行フラグは、自車両100がスロープを走行しているか否かの推定結果を表すフラグデータである。スロープ走行フラグは、衝突判定ECU20によってオンまたはオフの何れかの状態に設定される。スロープ走行フラグがオンに設定されている場合、自車両100がスロープを走行していると推定されたことが示される。一方、スロープ走行フラグがオフに設定されている場合、自車両100がスロープを走行していないと推定されたことが示される。本ステップにおいて、衝突判定ECU20は、スロープ走行フラグをオンに設定し、当該フラグの状態を記憶装置に記憶する。衝突判定ECU20は、ステップS26の処理を完了すると、スロープ走行判定処理を完了し、処理を図2のステップS2へ進める。
【0046】
ステップS27において、衝突判定ECU20は、スロープ走行フラグをオフに設定する。衝突判定ECU20は、スロープ走行フラグをオフに設定し、当該フラグの状態を記憶装置に記憶する。衝突判定ECU20は、ステップS27の処理を完了すると、スロープ走行判定処理を完了し、処理を図2のステップS2へ進める。
【0047】
上記スロープ走行判定処理によれば、自車両100がスロープを走行している可能性が高いか否かが、ナビゲーション装置12により取得された駐車場地図情報に基づいて判定される。また、自車両100がスロープを走行していないと駐車場地図情報に基づいて判定された場合、または駐車場地図情報が地図情報に含まれておらず、スロープを走行しているか否か判定できない場合は、自車両100がスロープを走行しているか否かが傾斜角ωに応じて判定される。すなわち、衝突判定ECU20は、自車両100が駐車場内においてスロープを走行している可能性が高いか否かを容易且つ正確に判定することができる。
【0048】
図2の説明に戻り、ステップS2において、衝突判定ECU20は、スロープ走行フラグがオンに設定されているか否か判定する。具体的には、衝突判定ECU20は、記憶装置に記憶されたスロープ走行フラグの状態を読み出し、当該状態がオンまたはオフの何れであるか判定する。衝突判定ECU20は、スロープ走行フラグがオンに設定されていると判定した場合、処理をステップS3へ進める。一方、衝突判定ECU20は、スロープ走行フラグがオフに設定されていると判定した場合、処理をステップS4へ進める。
【0049】
ステップS3において、衝突判定ECU20は、レーダー検出閾値Ethを補正値βに設定する。補正値βは、衝突判定ECU20の記憶装置に予め記憶された定数である。衝突判定ECU20は、レーダー検出閾値Ethを補正値βに設定する指示信号をレーダー装置11へ送信する。衝突判定ECU20は、ステップS3の処理を完了すると、処理をステップS5へ進める。
【0050】
ステップS4において、衝突判定ECU20は、レーダー検出閾値Ethを通常値αに設定する。通常値αは、衝突判定ECU20の記憶装置に予め記憶された、補正値βより小さい定数である。衝突判定ECU20は、レーダー検出閾値Ethを通常値αに設定する指示信号をレーダー装置11へ送信する。衝突判定ECU20は、ステップS4の処理を完了すると、処理をステップS5へ進める。
【0051】
ステップS5において、衝突判定ECU20は、検出物が有るか否か判定する。具体的には、衝突判定ECU20は、レーダー装置11から検出物情報を受信しているか否か判定する。なお、上述の通り、レーダー装置11は、受信強度Eの値がレーダー検出閾値Eth以上である場合に検出物情報を衝突判定ECU20へ送信する。衝突判定ECU20は、検出物情報を受信している場合、検出物が有ると判定し、処理をステップS6へ進める。一方、衝突判定ECU20は、検出物情報を受信していない場合、検出物が無いと判定し、処理をステップS9へ進める。
【0052】
上記ステップS2からステップS5の処理によれば、自車両100がスロープを走行している可能性が高い場合、レーダー検出閾値Ethの値が、自車両100がスロープを走行している可能性が高いと判定されていない場合に比べて大きな値(補正値β)に補正される。したがって、自車両100がスロープを走行している可能性が高い場合、自車両100がスロープを走行している可能性が低い場合に比べてレーダー装置11の障害物検出の感度が鈍くなる。そのため、自車両100がスロープを走行している可能性が高い場合、レーダー装置11により障害物が検出され難くなり、検出物と自車両100との衝突判定処理(後述ステップS7)が実行され難くなる。その結果、検出物と自車両100とが衝突する危険性が高いと判定され難くなる。すなわち、上述の処理によれば、衝突判定ECU20は、簡単な処理で自車両100と検出物とが衝突する危険性が高いとする衝突判定の感度を鈍くすることができる。
【0053】
ステップS6において、衝突判定ECU20は、衝突予想時間Tを算出する。衝突予想時間Tは、検出物が自車両100に衝突するまでに要すると予想される時間である。衝突判定ECU20は、レーダー装置11から受信した検出物情報および式(1)に基づいて衝突予想時間Tを算出し、当該衝突予想時間Tの値を自身の記憶装置に記憶する。
T=L/VR …(1)
衝突判定ECU20は、ステップS6の処理を完了すると、処理をステップS7へ進める。
【0054】
ステップS7において、衝突判定ECU20は、衝突の危険性が高いか否か判定する。具体的には、衝突判定ECU20は、衝突予想時間Tの値が衝突判定閾値Tth以下であるか否か判定する。衝突判定閾値Tthは、検出物と自車両100とが衝突する危険性が高いか否かを判定するための閾値である。衝突判定閾値Tthは、衝突判定ECU20の記憶装置に予め記憶された任意の定数である。衝突判定ECU20は、衝突予想時間Tの値が衝突判定閾値Tth以下である場合、自車両100と検出物とが衝突する危険性が高いと判定し、処理をステップS8へ進める。一方、衝突判定ECU20は、衝突予想時間Tの値が衝突判定閾値Tthより大きい場合、自車両100と検出物とが衝突する危険性が低いと判定し、処理をステップS9へ進める。
【0055】
ステップS8において、衝突判定ECU20は、警報を出力する。具体的には、衝突判定ECU20は、警報装置30へ警報を報知する指示信号を出力する。衝突判定ECU20は、ステップS8の処理を完了すると、処理をステップS9へ進める。
【0056】
ステップS9において、衝突判定ECU20は、IG電源がオフに設定されたか否か判定する。衝突判定ECU20は、IG電源がオフに設定された判定した場合、図2の処理を終了する。一方、衝突判定ECU20は、IG電源がオフに設定されていないと判定した場合、処理をステップS1へ戻し、上述の各ステップの処理をループして繰り返し実行する。
【0057】
以上に述べた通り、本発明の第1の実施形態に係る衝突予測装置1によれば、自車両100がスロープを走行している可能性が高い状況下、すなわち路面や天井等を障害物として誤検出し易い状況下においては、衝突判定の感度を低減させて、自車両100と検出物との衝突の誤判定を抑制することができる。
【0058】
自車両100が障害物と衝突する危険性が高いと誤判定された場合には、警報装置30による不要な警報が報知され、ドライバーが煩わしさを感じる場合があるが、衝突予測装置1によれば上記の通り誤判定が抑制されるため、ドライバーが煩わしさを感じることを防ぐことができる。
【0059】
また、上記の通り、衝突予測装置1は、多くの車両に搭載されているハードウェアを利用して構成することができる。すなわち、衝突予測装置1によれば、自車両100と障害物との衝突を低コスト且つ高い精度で予測可能である。
【0060】
(第2の実施形態)
上記第1の実施形態では、衝突判定ECU20がレーダー装置11の障害物検出の感度をスロープ走行フラグのオン/オフ状態に応じて鈍くすることによって検出物と自車両100との衝突判定の感度を鈍くする例について説明したが、衝突判定ECU20は、スロープ走行フラグのオン/オフ状態に応じて衝突判定を停止することによって、検出物と自車両100との衝突判定の感度を鈍くしても構わない。以下、第2の実施形態に係る衝突予測装置について説明する。第2の実施形態に係る衝突予測装置のハードウェア構成は、第1の実施形態に係る衝突予測装置1の構成と同様であるため、詳細な説明は省略する(図1参照)。
【0061】
以下、第2の実施形態に係る衝突判定ECU20の処理について図4を参照して説明する。図4は、第2の実施形態に係る衝突判定ECU20が実行する処理の詳細を示したフローチャートの一例である。第2の実施形態に係る衝突判定ECU20は、図2のステップS2の処理に替えて、ステップR2の処理を実行する。図4において、上述第1の実施形態に示した処理と同様の処理を実行するステップについては同様の符号を付し、詳細な説明を省略する。
【0062】
ステップR2において、衝突判定ECU20は、上述ステップS2と同様にしてスロープ走行フラグがオンに設定されているか否か判定する。但し、衝突判定ECU20は、ステップR2においては、スロープ走行フラグがオンに設定されていると判定した場合、処理をステップS9へ進める。また、衝突判定ECU20は、スロープ走行フラグがオフに設定されていると判定した場合、処理をステップS5へ進める。
【0063】
上記のような第2の実施形態に係る衝突判定ECU20の処理によれば、第1の実施形態に係る衝突判定ECU20が実行する処理よりも簡単な処理で自車両100と検出物とが衝突する危険性が高いと判定し難くすることができる。すなわち、第2の実施形態に係る衝突予測装置によれば、第1の実施形態に係る衝突予測装置と同様に自車両100と障害物との衝突を低コスト且つ高い精度で予測可能である。
【0064】
(第3の実施形態)
上記第1の実施形態では、衝突判定ECU20がレーダー装置11の障害物検出の感度をスロープ走行フラグのオン/オフ状態に応じて鈍くすることによって検出物と自車両100との衝突判定の感度を変更する例について説明したが、衝突判定ECU20は、スロープ走行フラグのオン/オフ状態に応じて衝突判定閾値Tthの値を変更することによって、衝突判定の感度を変更しても構わない。以下、第3の実施形態に係る衝突予測装置について説明する。第3の実施形態に係る衝突予測装置のハードウェア構成は、第1の実施形態に係る衝突予測装置1の構成と同様であるため、詳細な説明は省略する(図1参照)。
【0065】
以下、第3の実施形態に係る衝突判定ECU20の処理について図5を参照して説明する。図5は、第3の実施形態に係る衝突判定ECU20が実行する処理の詳細を示したフローチャートの一例である。第3の実施形態に係る衝突判定ECU20は、図2のステップS3の処理に替えて、ステップP3の処理を実行する。また、第3の実施形態に係る衝突判定ECU20は、図2のステップS4の処理に替えて、ステップP4の処理を実行する。なお、図5において、上述第1の実施形態に示した処理と同様の処理を実行するステップについては同様の符号を付し、詳細な説明を省略する。
【0066】
ステップP3において、衝突判定ECU20は、衝突判定閾値Tthを補正値γに設定する。補正値γは、衝突判定ECU20の記憶装置に予め記憶された定数である。衝突判定ECU20は、衝突判定閾値Tthを補正値γに設定する指示信号をレーダー装置11へ送信する。衝突判定ECU20は、ステップP3の処理を完了すると、処理をステップS5へ進める。
【0067】
ステップP4において、衝突判定ECU20は、衝突判定閾値Tthを通常値δに設定する。通常値δは、衝突判定ECU20の記憶装置に予め記憶された、補正値γより小さい定数である。衝突判定ECU20は、衝突判定閾値Tthを通常値δに設定する指示信号をレーダー装置11へ送信する。衝突判定ECU20は、ステップP4の処理を完了すると、処理をステップS5へ進める。
【0068】
上記ステップP3およびステップP4の処理によれば、自車両100がスロープを走行している可能性が高い場合、衝突判定閾値Tthの値が、自車両100がスロープを走行している可能性が低い場合に比べて小さな値に補正される。したがって、検出物と自車両100との相対的な位置関係や移動情報が同様であったとしても、自車両100がスロープを走行している可能性が高い場合には、スロープを走行している可能性が低い場合に比べて検出物と自車両100とが衝突する危険性が高いと判定され難くなる。
【0069】
以上の通り、第3の実施形態に係る衝突予測装置によれば、第1の実施形態に係る衝突予測装置と同様に自車両100と障害物との衝突を低コスト且つ高い精度で予測可能である。また、上記のような第3の実施形態に係る衝突判定ECU20の処理によれば、レーダー装置11と衝突判定ECU20とが設定値変更のための通信を行うことなく、少ない処理で衝突判定の感度を低減することができる。
【0070】
(第4の実施形態)
上記第1の実施形態では、衝突判定ECU20がレーダー検出閾値Ethの値をスロープ走行フラグのオン/オフ状態に応じて変更することによってレーダー装置11が障害物を検出する感度を鈍くする例について説明したが、衝突判定ECU20は、レーダー装置11が送信する電磁波の強度(以下、送信電磁波強度Mと呼称する。)を変更することによって、レーダー装置11が障害物を検出する感度を鈍くしても構わない。以下、第4の実施形態に係る衝突予測装置について説明する。第4の実施形態に係る衝突予測装置のハードウェア構成は、第1の実施形態に係る衝突予測装置1の構成と同様であるため、詳細な説明は省略する(図1参照)。
【0071】
以下、第4の実施形態に係る衝突判定ECU20の処理について図6を参照して説明する。図6は、第4の実施形態に係る衝突判定ECU20が実行する処理の詳細を示したフローチャートの一例である。第4の実施形態に係る衝突判定ECU20は、図2のステップS3の処理に替えて、ステップQ3の処理を実行する。また、第4の実施形態に係る衝突判定ECU20は、図2のステップS4の処理に替えて、ステップQ4の処理を実行する。なお、図6において、上述第1の実施形態に示した処理と同様の処理を実行するステップについては同様の符号を付し、詳細な説明を省略する。
【0072】
ステップQ3において、衝突判定ECU20は、送信電磁波強度Mを補正値εに設定する。補正値εは、衝突判定ECU20の記憶装置に予め記憶された定数である。衝突判定ECU20は、送信電磁波強度Mを補正値εに設定する指示信号をレーダー装置11へ送信する。衝突判定ECU20は、ステップQ3の処理を完了すると、処理をステップS5へ進める。
【0073】
ステップQ4において、衝突判定ECU20は、送信電磁波強度Mを通常値ζに設定する。通常値ζは、衝突判定ECU20の記憶装置に予め記憶された、補正値εより大きい定数である。衝突判定ECU20は、送信電磁波強度Mを通常値ζに設定する指示信号をレーダー装置11へ送信する。衝突判定ECU20は、ステップQ4の処理を完了すると、処理をステップS5へ進める。
【0074】
上記ステップQ3およびステップQ4の処理によれば、自車両100がスロープを走行している可能性が高い場合、自車両100がスロープを走行している可能性が低い場合に比べて送信電磁波強度Mの値が小さな値に補正される。したがって、自車両100がスロープを走行している可能性が高い場合には、スロープを走行している可能性が低い場合に比べてレーダー装置11により障害物が検出され難くなる。
【0075】
上記の通り、第4の実施形態に係る衝突予測装置によれば、第1の実施形態と同様に、簡単な処理で自車両100と検出物とが衝突する危険性が高いとする衝突判定の感度を鈍くすることができる。また、第4の実施形態に係る衝突予測装置によれば、自車両100と障害物との衝突を低コスト且つ高い精度で予測することができる。
【0076】
なお、上記各実施形態では、自車両100が駐車場内を走行している場合に自車両100がスロープを走行している可能性が高いと衝突判定ECUが判定する例について説明したが、衝突判定ECU20は、駐車場に限らず、スロープが存在している可能性が高い任意の建築造成物内や敷地内を自車両100が走行している場合に自車両100がスロープを走行している可能性が高いと判定して構わない。
【0077】
また、上記各実施形態では、レーダー装置11が自車両100の前端に搭載される例について説明したが、レーダー装置11は自車両100の任意の位置に搭載されて構わない。例えば、レーダー装置11は、自車両100の後端に搭載され、自車両100の後方に存在する障害物を検出しても構わない。
【0078】
また、上記各実施形態では、衝突判定ECU20が、自車両100が駐車場内であるか否か、および、自車両100が駐車場内のスロープを走行しているか否かを判定する例について説明したが(ステップS21からステップS23)、ナビゲーション装置12が当該判定処理を実行しても構わない。このような場合、自車両100が駐車場内であるか否か、および、自車両100が駐車場内のスロープを走行しているか否かの判定結果を示すデータが、ナビゲーション装置12から衝突判定ECU20へ送信される。そして、衝突判定ECU20は、受信した上記判定結果を示すデータに基づいてスロープ走行フラグのオン/オフ状態を切り替える。このような構成とする場合、衝突判定ECU20に必要とされる記憶領域や処理量を低減することができる。
【産業上の利用可能性】
【0079】
本発明に係る衝突予測装置は、低コストで精度の高い衝突予測を可能とする衝突予測装置などとして有用である。
【符号の説明】
【0080】
1 衝突予測装置
11 レーダー装置
12 ナビゲーション装置
13 傾斜角センサ
20 衝突判定ECU
30 警報装置
100 自車両
【特許請求の範囲】
【請求項1】
車両に搭載され、当該車両と障害物との衝突を予測する衝突予測装置であって、
前記車両の周囲に電磁波を送信し、障害物から反射された当該電磁波の反射波を受信することによって当該障害物を検出する障害物検出手段と、
前記障害物が検出された場合、前記車両と前記障害物との衝突の危険性が高いか否かを判定する衝突判定手段と、
高さの異なるフロアを往来するためのスロープを備えた建築造成物内において当該スロープ上を前記車両が走行している可能性が高いか否かを判定するスロープ走行判定手段と、
前記車両が前記スロープを走行している可能性が高いと判定された場合、前記衝突判定手段の判定感度を前記車両が前記スロープを走行している可能性が高いと判定されていない場合に比べて低減する感度変更手段とを備える、衝突予測装置。
【請求項2】
前記車両の周囲の地図情報、および当該地図情報における当該車両の現在地情報を取得するナビゲーション手段をさらに備え、
前記スロープ走行判定手段は、前記車両が前記スロープを走行している可能性が高いか否かを少なくとも前記地図情報および前記現在地情報に基づいて判定することを特徴とする、請求項1に記載の衝突予測装置。
【請求項3】
前記建築造成物は少なくとも駐車場を含み、
前記スロープ走行判定手段は、
前記車両が駐車場の内部を走行しているか否かを前記地図情報および前記現在地情報に基づいて判定する駐車場走行判定手段と、
前記車両が駐車場内を走行していると判定された場合、前記車両が前記スロープを走行している可能性が高いと判定する総合判定手段とを含むことを特徴とする、請求項2に記載の衝突予測装置。
【請求項4】
前記地図情報は、駐車場内部の地図情報を示す駐車場地図情報を含み、
前記駐車場地図情報は、少なくとも前記駐車場内部における前記スロープの位置情報を含み、
前記スロープ走行判定手段は、前記車両が駐車場内部において前記スロープを走行しているか否かを前記現在地情報、および当該駐車場内部の地図情報を示す前記駐車場地図情報に基づいて判定する詳細走行位置判定手段をさらに含み、
前記総合判定手段は、前記駐車場走行判定手段により前記車両が駐車場内を走行していると判定され、且つ前記詳細走行位置判定手段により前記車両が当該駐車場内部において前記スロープを走行していると判定された場合、前記車両がスロープを走行している可能性が高いと判定することを特徴とする、請求項3に記載の衝突予測装置。
【請求項5】
前記車両の車体のピッチ方向の傾斜角を検出する傾斜角検出手段と、
前記傾斜角が予め定められた閾値と比較することにより前記車両の車体がピッチ方向に傾いているか否かを判定する姿勢判定手段とをさらに備え、
前記総合判定手段は、前記駐車場走行判定手段により前記車両が駐車場内を走行していると判定され、且つ前記詳細走行位置判定手段により前記車両が当該駐車場内部において前記スロープを走行していないと判定され、且つ前記車両の車体がピッチ方向に傾いていると判定された場合、前記車両が前記スロープを走行している可能性が高いと判定することを特徴とする、請求項4に記載の衝突予測装置。
【請求項6】
前記障害物検出手段は、前記反射波の受信強度が予め定められた検出閾値以上である場合、前記障害物を検出し、
前記感度変更手段は、前記車両が前記スロープを走行している可能性が高いと判定された場合、前記検出閾値を前記車両が前記スロープを走行している可能性が高いと判定されていない場合に比べて大きくすることによって、前記衝突判定手段の判定感度を低減することを特徴とする、請求項1および5の何れか1つに記載の衝突予測装置。
【請求項7】
前記衝突判定手段は、前記障害物と前記車両とが衝突するまでに要すると予想される衝突予想時間を算出し、当該衝突予想時間が予め定められた衝突判定閾値以下である場合、前記車両と前記障害物との衝突の危険性が高いか否かを判定し、
前記感度変更手段は、前記車両が前記スロープを走行している可能性が高いと判定された場合、前記衝突判定閾値を前記車両が前記スロープを走行している可能性が高いと判定されていない場合に比べて小さくすることによって、前記衝突判定手段の判定感度を低減することを特徴とする、請求項1および5の何れか1つに記載の衝突予測装置。
【請求項8】
前記障害物検出手段が送信する電磁波の強度を変更する電磁波強度制御手段をさらに備え、
前記感度変更手段は、前記車両が前記スロープを走行している可能性が高いと判定された場合、前記電磁波の強度を前記車両が前記スロープを走行している可能性が高いと判定されていない場合に比べて小さくすることによって、前記衝突判定手段の判定感度を低減することを特徴とする、請求項1および5の何れか1つに記載の衝突予測装置。
【請求項9】
前記感度変更手段は、前記車両が前記スロープを走行している可能性が高いと判定された場合、前記衝突判定手段による判定を停止することによって前記衝突判定手段の判定感度を低減することを特徴とする、請求項1および5の何れか1つに記載の衝突予測装置。
【請求項1】
車両に搭載され、当該車両と障害物との衝突を予測する衝突予測装置であって、
前記車両の周囲に電磁波を送信し、障害物から反射された当該電磁波の反射波を受信することによって当該障害物を検出する障害物検出手段と、
前記障害物が検出された場合、前記車両と前記障害物との衝突の危険性が高いか否かを判定する衝突判定手段と、
高さの異なるフロアを往来するためのスロープを備えた建築造成物内において当該スロープ上を前記車両が走行している可能性が高いか否かを判定するスロープ走行判定手段と、
前記車両が前記スロープを走行している可能性が高いと判定された場合、前記衝突判定手段の判定感度を前記車両が前記スロープを走行している可能性が高いと判定されていない場合に比べて低減する感度変更手段とを備える、衝突予測装置。
【請求項2】
前記車両の周囲の地図情報、および当該地図情報における当該車両の現在地情報を取得するナビゲーション手段をさらに備え、
前記スロープ走行判定手段は、前記車両が前記スロープを走行している可能性が高いか否かを少なくとも前記地図情報および前記現在地情報に基づいて判定することを特徴とする、請求項1に記載の衝突予測装置。
【請求項3】
前記建築造成物は少なくとも駐車場を含み、
前記スロープ走行判定手段は、
前記車両が駐車場の内部を走行しているか否かを前記地図情報および前記現在地情報に基づいて判定する駐車場走行判定手段と、
前記車両が駐車場内を走行していると判定された場合、前記車両が前記スロープを走行している可能性が高いと判定する総合判定手段とを含むことを特徴とする、請求項2に記載の衝突予測装置。
【請求項4】
前記地図情報は、駐車場内部の地図情報を示す駐車場地図情報を含み、
前記駐車場地図情報は、少なくとも前記駐車場内部における前記スロープの位置情報を含み、
前記スロープ走行判定手段は、前記車両が駐車場内部において前記スロープを走行しているか否かを前記現在地情報、および当該駐車場内部の地図情報を示す前記駐車場地図情報に基づいて判定する詳細走行位置判定手段をさらに含み、
前記総合判定手段は、前記駐車場走行判定手段により前記車両が駐車場内を走行していると判定され、且つ前記詳細走行位置判定手段により前記車両が当該駐車場内部において前記スロープを走行していると判定された場合、前記車両がスロープを走行している可能性が高いと判定することを特徴とする、請求項3に記載の衝突予測装置。
【請求項5】
前記車両の車体のピッチ方向の傾斜角を検出する傾斜角検出手段と、
前記傾斜角が予め定められた閾値と比較することにより前記車両の車体がピッチ方向に傾いているか否かを判定する姿勢判定手段とをさらに備え、
前記総合判定手段は、前記駐車場走行判定手段により前記車両が駐車場内を走行していると判定され、且つ前記詳細走行位置判定手段により前記車両が当該駐車場内部において前記スロープを走行していないと判定され、且つ前記車両の車体がピッチ方向に傾いていると判定された場合、前記車両が前記スロープを走行している可能性が高いと判定することを特徴とする、請求項4に記載の衝突予測装置。
【請求項6】
前記障害物検出手段は、前記反射波の受信強度が予め定められた検出閾値以上である場合、前記障害物を検出し、
前記感度変更手段は、前記車両が前記スロープを走行している可能性が高いと判定された場合、前記検出閾値を前記車両が前記スロープを走行している可能性が高いと判定されていない場合に比べて大きくすることによって、前記衝突判定手段の判定感度を低減することを特徴とする、請求項1および5の何れか1つに記載の衝突予測装置。
【請求項7】
前記衝突判定手段は、前記障害物と前記車両とが衝突するまでに要すると予想される衝突予想時間を算出し、当該衝突予想時間が予め定められた衝突判定閾値以下である場合、前記車両と前記障害物との衝突の危険性が高いか否かを判定し、
前記感度変更手段は、前記車両が前記スロープを走行している可能性が高いと判定された場合、前記衝突判定閾値を前記車両が前記スロープを走行している可能性が高いと判定されていない場合に比べて小さくすることによって、前記衝突判定手段の判定感度を低減することを特徴とする、請求項1および5の何れか1つに記載の衝突予測装置。
【請求項8】
前記障害物検出手段が送信する電磁波の強度を変更する電磁波強度制御手段をさらに備え、
前記感度変更手段は、前記車両が前記スロープを走行している可能性が高いと判定された場合、前記電磁波の強度を前記車両が前記スロープを走行している可能性が高いと判定されていない場合に比べて小さくすることによって、前記衝突判定手段の判定感度を低減することを特徴とする、請求項1および5の何れか1つに記載の衝突予測装置。
【請求項9】
前記感度変更手段は、前記車両が前記スロープを走行している可能性が高いと判定された場合、前記衝突判定手段による判定を停止することによって前記衝突判定手段の判定感度を低減することを特徴とする、請求項1および5の何れか1つに記載の衝突予測装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2011−133946(P2011−133946A)
【公開日】平成23年7月7日(2011.7.7)
【国際特許分類】
【出願番号】特願2009−290314(P2009−290314)
【出願日】平成21年12月22日(2009.12.22)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
【公開日】平成23年7月7日(2011.7.7)
【国際特許分類】
【出願日】平成21年12月22日(2009.12.22)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
[ Back to top ]