
衝突予測装置
【課題】簡易な方法で他車両の挙動を予測し、より精度の良いPCS制御を行うことのできる衝突予測装置を提供する。
【解決手段】自車両前方の他車両を検出する検出手段と、当該検出手段によって検出された上記他車両と上記自車両とが衝突する危険性が高いと判断した場合に衝突危険回避動作を行う衝突危険回避手段と、上記他車両に備わったナビゲーションシステムによって得られた当該他車両の位置情報および当該他車両の経路案内情報を車車間通信を介して受信する受信手段と、上記他車両の位置情報および上記他車両の経路案内情報に基づいて当該他車両の挙動を予測する予測手段と、当該予測手段によって予測された上記他車両の挙動が予め定められた第1条件を満たす場合に上記衝突危険回避手段が行う上記衝突危険回避動作のタイミングを上記第1条件を満たなかった場合より早くする動作変更手段とを備える。
【解決手段】自車両前方の他車両を検出する検出手段と、当該検出手段によって検出された上記他車両と上記自車両とが衝突する危険性が高いと判断した場合に衝突危険回避動作を行う衝突危険回避手段と、上記他車両に備わったナビゲーションシステムによって得られた当該他車両の位置情報および当該他車両の経路案内情報を車車間通信を介して受信する受信手段と、上記他車両の位置情報および上記他車両の経路案内情報に基づいて当該他車両の挙動を予測する予測手段と、当該予測手段によって予測された上記他車両の挙動が予め定められた第1条件を満たす場合に上記衝突危険回避手段が行う上記衝突危険回避動作のタイミングを上記第1条件を満たなかった場合より早くする動作変更手段とを備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、衝突予測装置に関し、より特定的には、車両に搭載され他車両の挙動を予測し、より精度の良いPCS制御を行うことのできる衝突予測装置に関する。
【背景技術】
【0002】
近年、自車両の前方から接近してくる物体(例えば他車両)を対象物として検出して、当該対象物と自車両とが衝突する危険があるか否かを判断し、当該対象物との衝突の危険性が高い場合に警報等によりドライバーに対して警告を行ったり、自車両に備わったブレーキ装置を制御して当該自車両のドライバーが行うブレーキ操作をアシストしたりする、いわゆる衝突回避制御(PCS(Pre-Clash Safety)制御と称すこともある)を行うことのできる装置が実用化されている。
【0003】
具体的には、上記PCS制御は、一般的には、自車両に備わったレーダ装置により当該自車両の前方の物体を対象物として検出し、当該検出された対象物と自車両との位置関係等に基づき、自車両が上記対象物を回避可能か否かを判断することによって行われる。
【0004】
また、その一方で、自車両の前方を走行している他車両の突然の右左折を予測して、例えば、警報等によりドライバーに対して行う警告等を早いものにすれば、より精度の良いPCS制御を行うことができ、このようなことが望まれている。
【0005】
例えば、自車両の前方を走行している他車両の位置や動きを判断する方法として、自車両に備わったカメラにより、当該自車両の前方を走行している他車両の方向指示器の点滅を認識する方法がある。しかしながら、例えば、自車両の前方を走行している他車両が方向指示器を出さずに右左折した場合、この方法を用いることは難しい。
【0006】
また、例えば、他車両の位置を精度良く把握することのできる技術として、特許文献1に開示されている技術がある。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開2007−241726号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
上記特許文献1に開示されている技術は、他車両の位置を精度良く把握することによって、当該ドライバーの運転支援を行う運転支援システムである。具体的には、自車両は、車車間通信によって、他車両から当該他車両の案内経路情報や方向指示器の動作を示す情報を取得する。この場合、例えば、他車両の右折の方向指示器が作動していれば、当該他車両は右折する可能性が高いため、右折後の道路上の位置を当該他車両の位置として推定してもよいとするものである。これによって、他車両の位置を精度良く把握することができるものである。
【0009】
しかしながら、上記特許文献1に開示されている技術は、他車両の位置を精度良く把握することができるものの、例えば、他車両は右折する可能性が高いと判断された場合におけるリスク、つまり他車両の挙動の変化におけるリスクまで考慮されておらず、精度の良いPCS制御を行うことができない。
【0010】
本発明は、上記事情に鑑みてなされたものであり、その目的とするところは、簡易な方法で他車両の挙動を予測し、より精度の良いPCS制御を行うことのできる衝突予測装置を提供することにある。
【課題を解決するための手段】
【0011】
上記目的を達成するために、本発明は以下の構成を採用した。すなわち第1の発明は、自車両前方の他車両と当該自車両とが衝突するか否かを予測する衝突予測装置である。上記衝突予測装置は、上記自車両前方の他車両を検出する検出手段と、当該検出手段によって検出された上記他車両と上記自車両とが衝突する危険性が高いと判断した場合に衝突危険回避動作を行う衝突危険回避手段と、上記他車両に備わったナビゲーションシステムによって得られた当該他車両の位置情報および当該他車両の経路案内情報を車車間通信を介して受信する受信手段と、上記他車両の位置情報および上記他車両の経路案内情報に基づいて当該他車両の挙動を予測する予測手段と、当該予測手段によって予測された上記他車両の挙動が予め定められた第1条件を満たす場合に上記衝突危険回避手段が行う上記衝突危険回避動作のタイミングを上記第1条件を満たなかった場合より早くする動作変更手段とを備える。
【0012】
第2の発明は、上記第1の発明において、上記自車両の位置情報を算出する位置情報算出手段をさらに備える。また、上記受信手段によって受信することのできた位置情報は上記検出手段が検出した上記他車両に備わったナビゲーションシステムによって得られた位置情報であるか否かを上記自車両の位置情報に基づき判断することを特徴とする。
【0013】
第3の発明は、上記第1または第2の発明において、上記第1条件は上記他車両が急減速するか否か、車線変更するか否か、右左折するか否かの上記他車両の挙動の変化の少なくとも何れか1つである。そして、上記動作変更手段は上記予測手段によって上記第1条件の少なくとも何れか1つが予測された場合、上記衝突危険回避手段が行う上記衝突危険回避動作を行うタイミングを上記第1条件の少なくとも何れか1つが予測されなかった場合より早くすることを特徴とする。
【0014】
第4の発明は、上記第1または第2の発明において、上記受信手段は上記他車両から2以上の道路が交わる箇所までの距離および当該道路の右左折角度の少なくとも何れか1つをさらに受信する。そして、上記動作変更手段は上記距離および上記右左折角度の少なくとも何れか1つが予め定められた第2条件を満たした場合、上記衝突危険回避手段が行う上記衝突危険回避動作のタイミングを上記第2条の少なくとも何れか1つを満たさなかった場合より早くすることを特徴とする。
【0015】
第5の発明は、上記第4の発明において、上記第2条件は上記距離が予め定められた距離より短いか否か、上記右左折角度が予め定められた値を超えるか否かの少なくとも何れか1つであることを特徴とする。
【0016】
第6の発明は、上記第1または第2の発明において、道路に存在する物体の情報を当該道路に設置された通信設備から受信する情報受信手段をさらに備える。また、上記予測手段は、上記他車両の位置情報と上記他車両の経路案内情報と上記物体の情報とに基づいて上記他車両は急減速するか否か、停止するか否か、車線変更するか否か、右左折するか否かの上記他車両の挙動の少なくとも何れか1つを予測する。そして、上記動作変更手段は上記予測手段によって上記挙動の少なくとも何れか1つが予測された場合、上記衝突危険回避手段が行う衝突危険回避動作を行うタイミングを上記挙動の少なくとも何れか1つが予測されなかった場合より早くすることを特徴とする。
【0017】
第7の発明は、上記第1または第2の発明において、上記衝突危険回避手段が行う上記衝突危険回避動作は上記自車両の運転者に対する警告および上記他車両の挙動に関する情報の報知の少なくと1つを含むことを特徴とする。
【発明の効果】
【0018】
上記第1の発明によれば、車両に備わったカーナビゲーションシステムの経路案内等の各種情報を取得し、車両の挙動の変化を予測し、当該予測結果に応じてPCS制御の動作基準を変化させることができるので、自車両mvのドライバーは、予め当該自車両mvを減速させたり、予め車間距離をとったりして自車両mvと車両とが接近しすぎないようにすることができる。また、PCS制御についても早いタイミングで行うことができ、より精度の高いPCS制御を行うことが可能となる。つまり、車載カーナビからの情報を取得するといった、簡易な方法で他車両の挙動を予測し、より精度の良いPCS制御を行うことができる。
【0019】
上記第2の発明によれば、例えば、レーダ装置が、自車両の進行方向の前方に存在する複数の物体(車両)を検出し、さらに当該複数の複数の物体(車両)と車車間通信をしている場合、レーダ装置で検出した物体のうち、挙動変化をする物体を特定することができ、当該特定された物体に対してPCS制御の動作態様を変更することができる。
【0020】
上記第3の発明によれば、他車両の様々な挙動変化に応じてPCS制御を早いタイミングで行うことができる。
【0021】
上記第4および上記第5の発明によれば、例えば、交差点の右左折角度を考慮して衝突危険回避動作を早いタイミングで行うことができる。つまり、例えば、90°の交差点(T字路)場合、Y字路のような狭角、つまり右左折角度の小さい交差点を曲がる場合と比べて、交差点直前で減速する度合いが大きくなる。すなわち交差点の角度に応じてPCS制御の動作基準を変更することも可能となり、より精度の高いPCS制御が可能となる。さらに、例えば交差点までの距離が短い場合、他車両はすぐに右左折することが予測されるので、交差点までの距離に応じてPCS制御の動作基準を変更することも可能となり、より精度の高いPCS制御が可能となる。
【0022】
上記第6の発明によれば、例えば、他車両が右左折した先に歩行者がいる場合などにおいても、より精度の高いPCS制御を行うことが可能となる。
【0023】
上記第7の発明によれば、運転者に対する警告および前記他車両の挙動に関する情報の報知が早いタイミングで行うことができるので、自車両のドライバーは、当該自車両を減速させ、予め車間距離をとって自車両と他車両とが接近しすぎないようにすることができる。
【図面の簡単な説明】
【0024】
【図1】自車両mvの前方に車両が存在する場面の一例を示した図
【図2】衝突予測装置を含むドライバーサポートシステム1の構成の一例を示すブロック図
【図3】第1の実施形態に係る衝突予測装置を含むドライバーサポートシステムの運転支援ECU11の動作の一例を示したフローチャート
【図4】自車両mvの進行方向の前方に存在する物体と自車両mvとの位置関係を示す図
【図5】他車両ov1の経路案内を示す情報が終了する場合の一例を示す図
【図6】自車両mvと異なる車線で当該自車両mvの前方を走行している他車両ov1を示す図
【図7】自車両mvの前方に先行車両が存在する場面の一例を示した図
【図8】信号や横断歩道が存在する十字路(交差点)の一例を示した図
【発明を実施するための形態】
【0025】
(第1の実施形態)
以下、図面を参照しつつ、第1の実施形態に係る衝突予測装置について説明する。なお、本実施形態では、当該衝突予測装置を含むドライバーサポートシステム(DSS(Driver Support System))が、車両(以下、自車両mvと称す)に搭載される場合を想定して説明する。
【0026】
具体的には、本実施形態に係る衝突予測装置を含むドライバーサポートシステムは、自車両mvの前方の物体を対象物として検出する検出装置の一例としてレーダ装置を備え、当該レーダ装置から得られる情報に基づいて、自車両mvの前方の物体(具体的には他車両)を対象物として検出し、当該対象物と自車両mvとが衝突する危険があるか否かを判断し、当該対象物との衝突の危険性が高い場合、自車両mvに搭載されている各種装置に指示し、警報等によりドライバーに対して警告を行ったり、ドライバーが行うブレーキ操作をアシストしたりする、いわゆる衝突回避制御を行う(以下、PCS(Pre-Clash Safety)制御と称す)ことを想定して、以下説明する。
【0027】
さらに、本実施形態に係る衝突予測装置を含むドライバーサポートシステムは、当該自車両mvの前方を走行している先行車両から発信される情報に基づき、PCS制御の動作態様を変化させるものである。
【0028】
ここで、図1を用いて、本実施形態に係る衝突予測装置を含むドライバーサポートシステムの概要について簡単に説明する。
【0029】
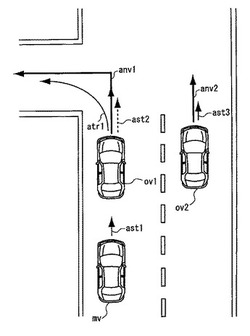
図1は、自車両mvの前方に先行車両が存在する場面の一例を示した図である。なお、以下の説明において、自車両mvと同じ車線で当該自車両mvの先行車両を特に他車両ov1と称し、自車両mvと異なる車線で当該自車両mvの先行車両を特に他車車両ov2と称する。また、他車両ov1と他車両ov2とを特に区別する場合を除き、自車両mv以外の車両のことを単に車両と称する。
【0030】
図1に示すように、自車両mvは、図1の矢印ast1の方向に直進しているものとし、当該自車両mvの前方には他車両ov1および他車両ov2が存在しているものとする。なお、図1に示した走行路面のように、他車両ov1の前方がT字路になっている場合、当該他車両ov1は、左折せず図1の矢印ast2の方向に直進することも考えられるし、左折して図1の矢印atr1の方向に進むとも考えられる。ここで、他車両ov1が早めに左折を示す方向指示器を出していた場合、自車両mvのドライバーは、他車両ov1は左折するので減速する可能性があると認識し、自車両mvを減速させ、予め車間距離をとって自車両mvと他車両ov1とが接近しすぎないようにすることができる。しかしながら、例えば、他車両ov1が方向指示器を出すタイミングが遅い場合など、自車両mvのドライバーは、自車両mvを減速させ、予め車間距離をとることは難しい。
【0031】
ここで、例えば、他車両ov1に備わったカーナビゲーションシステムの経路案内が、この先のT字路を左折する案内の場合、つまり他車両ov1に備わったカーナビゲーションシステムが図1の矢印anv1方向に当該他車両ov1を案内することを予定している場合、左折して図1の矢印atr1の方向に進む可能性が高いと考えられる。
【0032】
例えば、自車両mvのドライバーが上述したような他車両ov1の動きを予め知ることができれば、自車両mvを減速させ、予め車間距離をとって自車両mvと他車両ov1とが接近しすぎないようにすることができるし、PCS制御についても早いタイミングで行うことができ、より精度の高いPCS制御を行うことが可能となる。つまり、本実施形態に係る衝突予測装置を含むドライバーサポートシステムは、車両に備わったカーナビゲーションシステムの経路案内等の各種情報を取得し、車両の挙動の変化を予測し、当該予測結果に応じてPCS制御の動作態様を変化させるものである。
【0033】
次に、図面を参照しつつ、本発明の第1の実施形態に係る衝突予測装置を含むドライバーサポートシステム1の構成および動作について説明する。
【0034】
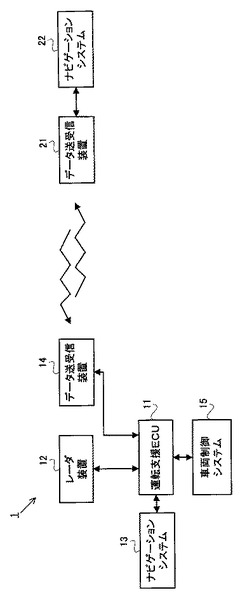
図2は、上記衝突予測装置を含むドライバーサポートシステム1の構成の一例を示すブロック図である。なお、図2に示した各構成および、後述する動作の説明は、本発明に係る衝突予測装置の構成および動作の単に一例に過ぎず、本願の効果を奏する範囲において、任意の構成を採用することが可能である。また図2には本実施形態での説明に必要な構成についてのみ示してある。
【0035】
図2に示すように、本発明の第1の実施形態に係る衝突予測装置を含むドライバーサポートシステム1は、運転支援ECU(Electronic Control Unit)11、レーダ装置12、ナビゲーションシステム13、データ送受信装置14を備えている。なお、上記運転支援ECU11には、車両制御システム15が接続されている。
【0036】
運転支援ECU11は、レーダ装置12から出力される情報を用いて、車両制御システム15に指示し、ドライバーの運転をサポートする。具体的には、運転支援ECU11は、後述するレーダ装置12から取得した信号を用いて、自車両mvに対する対象物の位置、速度、距離等の情報を算出する。例えば、運転支援ECU11は、レーダ装置12が照射した電磁波と受信した反射波との和および差や送受信タイミング等を用いて、レーダ装置12に対する対象物の相対距離、相対速度、および相対位置等を算出する。そして、運転支援ECU11は当該情報に基づいて、車両制御システム15に指示し、上述したようなPCS制御を行う。
【0037】
なお、運転支援ECU11は、請求項に記載の衝突回避手段、予測手段、動作変更手段の一例に相当する。
【0038】
また、詳細は後述するが、運転支援ECU11は、データ送受信装置14が受信した、自車両mvの前方を走行している車両(図1の例であると他車両ov1および他車両ov2)から発信される情報に基づき、車両制御システム15に指示し、PCS制御の動作態様を変化させる。
【0039】
次に、レーダ装置12は、自車両mvの所定の位置(例えば、自車両mvの前部の中央)に設置され、自車両mvの外側に向けて電磁波を照射し、自車両mvの前方を監視している。例えば、レーダ装置12は、自車両mvの前方に向けて電磁波を照射し、当該レーダ装置12の検出範囲内に存在する物体(図1の例であると他車両ov1および他車両ov2)を対象物として検出する。なお、レーダ装置12は請求項に記載の検出手段の一例に相当する。
【0040】
ナビゲーションシステム13は、自車両mvの現在位置を測位したり、電子地図等を用いて自車両mvを目的地へ誘導したりする、いわゆる車載カーナビである。なお、ナビゲーションシステム13は、いわゆる車載カーナビである必要はなく、少なくとも自車両mvの位置を測位することのできる装置であればよい。
【0041】
データ送受信装置14は、例えば他車両ov1に備わったデータ送受信装置21から発信される情報を取得したり、他車両ov1に備わったデータ送受信装置21へ向けて情報を発信したりする。なお、データ送受信装置14は、例えば、他のデータ送受信装置とデータのやりとりのできる装置であれば特に限定されるものではなく、例えば、無線LAN(IEEE 802.11b/g)等を利用すればよい。また、データ送受信装置14は請求項に記載の受信手段、情報受信手段の一例に相当する。
【0042】
また、本実施形態の説明においては、他車両ov1にも、上述したデータ送受信装置21とに加え、ナビゲーションシステム22が備わっているものとする。なお、他車両ov1に備わっているナビゲーションシステム22は、いわゆる車載カーナビのことであり、上述した自車両mvに備わっているナビゲーションシステム22と同様の機能を有するもものであればよい。
【0043】
なお、図示は省略したが、他車両ov2にも、他車両ov1と同様にデータ送受信装置とナビゲーションシステムとが備わっているものとする。
【0044】
また、本実施形態での説明では、通信形態として自車両mvと車両とで車車間通信(図1で示した例であると、他車両ov1や他車両ov2)を行うことを前提に説明するが、道路側に設置されたインフラ設備と自車両mvとの間等の様々な通信形態においても実現可能である。また、相互に通信可能な車両は、自車両mvや他車両ov1や他車両ov2に限定されず、データ送受信装置の通信範囲内で自車両mv周辺に存在するデータ送受信装置を装備した車両の情報が入手可能なものとする。さらに、データ送受信装置は、自車両mvが停車中においても当該自車両mvの各種情報を常時送信可能、および外部からの各種情報を常時受信可能な状態にあるものとする。
【0045】
図3の説明に戻って、車両制御システム15は、警告灯等の表示装置、警報ブザーなどの警報装置等(それぞれ図示せず)から構成され、運転支援ECU11からの指示に従いPCS制御を行うものである。具体的には、運転支援ECU11がレーダ装置2から出力された情報に基づき、当該レーダ装置2が検出した対象物と自車両mvとが衝突する危険性があると判断した場合、車両制御システム15(具体的には上記表示装置や上記警報装置等)は、自車両mvのドライバーに注意喚起を促す。
【0046】
また、車両制御システム15には、自車両mvのドライバーが当該自車両mvと対象物との衝突の危険を回避するために行うブレーキ操作をアシストする危険回避装置も含まれる。さらに、車両制御システム15には、運転支援ECU11が自車両mvと対象物との衝突が避けられないと判断したときに、シートベルトを巻き取ったり、シートを駆動させたりすることにより自車両mvの乗員の拘束性を高め、衝突被害を低減する衝突被害低減装置も含まれる。なお、当該衝突被害低減装置の動作として、エアバッグのセーフィング解除をしたり、シートポジションを衝突に備えたポジションに変更したりすることなどがある。なお、上述した車両制御システム15に含まれる装置は一例であり、これらの装置に限られるものではない。なお、上述した衝突被害を低減するために各種装置によって行われる動作および衝突を回避するために各種装置によって行われる動作を総称して、単に衝突危険回避と称し、当該衝突危険回避動作は請求項に記載の衝突危険回避動作に相当すする。
【0047】
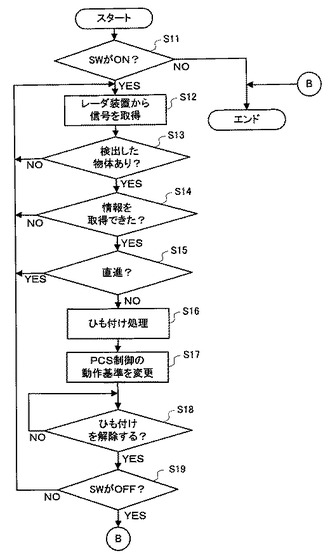
次に、図3を参照して、運転支援ECU11の動作の一例について説明する。図3は、第1の実施形態に係る衝突予測装置を含むドライバーサポートシステム1の運転支援ECU11の動作の一例を示したフローチャートである。
【0048】
図3に示したフローチャートでの処理は、運転支援ECU11内にそれぞれ備わった図示しない記憶部に記憶されている所定のプログラムを実行することにより行われる。また、図3に示すフローチャートでの処理は、衝突予測装置を含むドライバーサポートシステム1の電源がON(例えば、衝突予測装置を含むドライバーサポートシステム1が搭載された自車両mvの始動/停止スイッチがON)されることによって開始され、OFFされることによって終了する。なお、始動/停止スイッチは、以下SWと略す。
【0049】
図3のステップS11において、運転支援ECU11は、自車両mvのSWがONであるか否かを判断する。そして、SWがONであると判断した場合(YES)、次のステップS12に処理を進める。一方、運転支援ECU1は、自車両mvのSWがONではない、つまりSWがOFFであると判断した場合(NO)、当該フローチャートでの処理を終了する。
【0050】
ステップS12において、運転支援ECU11は、レーダ装置12から物体を検出した信号を取得し、次のステップS13に処理を進める。また、レーダ装置12が物体を検出しなかった場合(具体的には、自車両mvの前方に物体が存在しなかった場合)、当該レーダ装置12は、物体は無しであることを示す信号を運転支援ECU11に出力する。また、本実施形態においては、レーダ装置12は、複数の物体を検出することが可能であるものとし、より具体的にはレーダ装置12は、自車両mvの進行方向の前方に存在する物体(図1の例であると他車両ov1および他車両ov2)を検出するものとする。なお、図1で示した例の場合、レーダ装置12によって他車両ov1および他車両ov2が検出される。
【0051】
ステップS13において、運転支援ECU11は、レーダ装置12が検出した物体はあるか否かを判断する。具体的には、運転支援ECU11は、上記ステップS12でレーダ装置12から取得した信号に基づいて、レーダ装置12は、物体を検出したか否かを判断する。そして、運転支援ECU11によって、判断が肯定された場合(YES)、次のステップS14に処理を進める。一方、運転支援ECU11によって、判断が否定された場合(NO)、ステップS12に戻って再び信号を取得する。
【0052】
ステップS14において、運転支援ECU11は、車車間通信を行って、車両から情報を取得することができたか否かを判断する。例えば、図1に示した例であると、ナビゲーションシステム22およびデータ送受信装置21が備わっている他車両ov1からは、当該ナビゲーションシステム22によって求められている他車両ov1の現在位置を示す情報および経路案内を示す情報がデータ送受信装置21によって発信されている。そして、運転支援ECU11は、自車両mvに備わっているデータ送受信装置14によって他車両ov1の現在位置を示す情報および経路情報を示す情報を取得(受信)することができたか否かを判断する。なお、図1に示した他車両ov2からも上述したような情報を取得してもよい。
【0053】
そして、他車両ov1および/または他車両ov2の現在位置を示す情報および経路案内を示す情報を取得(受信)することができた場合、当該ステップS14の判断を肯定(YES)し、次のステップS15に処理を進める。一方、運転支援ECU11は、他車両ov1および/または他車両ov2の現在位置を示す情報および経路案内を示す情報を取得(受信)することができなかった場合、判断を否定(NO)し、ステップS12に処理を戻す。なお、当該ステップS14での判断が否定される場合とは、例えば、レーダ装置12は、物体を検出したが、当該物体(具体的には車両)にナビゲーションシステムおよびデータ送受信装置等が備わっていなかった場合などが考えられる。
【0054】
ステップS15において、運転支援ECU11は、上記ステップS14で取得した現在位置を示す情報および経路案内を示す情報、特に経路案内を示す情報に基づいて、レーダ装置12で検出した車両は直進するか否かを判断する。具体的には、図1において、他車両ov1は、直進せず、左折して図1の矢印atr1の方向に挙動変化(進路変更)すると予測される。一方、他車両ov2に備わったカーナビゲーションシステムが図1の矢印anv2方向に当該他車両ov2を案内することを予定している場合、当該他車両ov2は、挙動変化(進路変更)はせず、そのまま矢印ast3方向に直進すると予想される。なお、カーナビゲーションシステムによって、図1に示したように、レーダ装置12が検出した物体(車両)の少なくとも1つが直進ではない進路を予定している場合、当該ステップS15の判断は否定される。
【0055】
そして、運転支援ECU11は、当該ステップS15での判断を否定した場合(NO)、次のステップS16に処理を進める。なお、図1の例であると、挙動変化(進路変更)が予想される車両(具体的には他車両ov1)があるので、当該ステップS15の判断は否定される。一方、運転支援ECU11は、当該ステップS15での判断を肯定した場合(YES)、ステップS12に処理を戻す。なお、当該ステップS15での判断が肯定される場合とは、例えば、図1において、他車両ov1も他車両ov2と同様に経路案内を示す情報が左折せず(進路変更せず)直進することを示す場合等である。
【0056】
ステップS16において、運転支援ECU11は、ひも付け処理を行う。ここで、ひも付けについて説明すると、本実施形態における、ひも付けとは、レーダ装置12で検出した物体のうち、挙動変化(進路変更)が予測される物体は、どの物体であるか否かを判断することである。
【0057】
つまり、図1の例であると、経路案内を示す情報より、他車両ov1は左折する経路案内がされており、他車両ov2は直進する経路案内がされている。そして、運転支援ECU11は、データ送受信装置14を介して、左折する経路案内がされている車両と直進する経路案内がされている車両とが存在することを車車間通信によって認識している。しかしながら、その一方で、レーダ装置12は、自車両mvの前方の他車両ov1および他車両ov2を検出するが、当該レーダ装置12が検出するだけでは他車両ov1および他車両ov2のうち、どちらの車両が他車両ov1は左折する経路案内がされている車両であるか判断できない。
【0058】
そこで、運転支援ECU11は、レーダ装置12が検出した他車両ov1および他車両ov2のうち、挙動変化(進路変更)が予測される車両は、どの車両であるかを判断するし、ひも付けを行う。
【0059】
ここで、図4を参照して、運転支援ECU11が上記ステップS16で行うひも付け処理について簡単に説明する。
【0060】
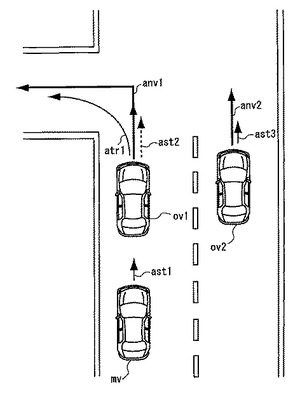
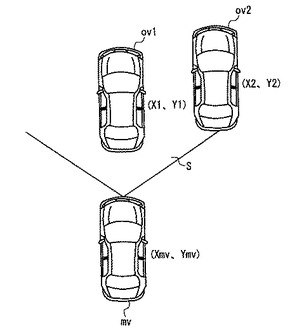
図4は、自車両mvの進行方向の前方に存在する物体(具体的には他車両ov1および他車両ov2)と自車両mvとの位置関係を示す図である。なお、図4の領域Sは、レーダ装置12の検出範囲を示す。
【0061】
まず、上述したように、ナビゲーションシステム22およびデータ送受信装置21が備わっている他車両ov1からは、当該ナビゲーションシステム22によって求められている他車両ov1の現在位置を示す情報および経路案内を示す情報がデータ送受信装置21によって発信されている。そして、上記ステップS14において、運転支援ECU11は、自車両mvに備わっているデータ送受信装置14によって他車両ov1の現在位置を示す情報および経路情報を取得(受信)した。他車両ov2についても同様。
【0062】
そして、図4に示すように、任意の点を原点とする座標系における自車両mvの位置を位置(Xmv、Ymv)とする。なお、位置(Xmv、Ymv)は、自車両mvに備わっているナビゲーションシステム13により取得することができる。また、任意の点を原点とする座標系における他車両ov1の位置を位置(X1、Y1)とする。なお、位置(X1、Y1)は、他車両ov1に備わっているナビゲーションシステム22により取得することができる。同様に他車両ov2の位置を位置(X2、Y2)とする。
【0063】
一方、運転支援ECU11は、自車両mvに備わっているレーダ装置12が検出した他車両ov1と自車両mvとの距離を当該レーダ装置12から取得し、当該自車両mvの位置を原点とした座標系で他車両ov1の位置(Lx1、Ly1)を算出する。同様に、運転支援ECU11は、自車両mvに備わっているレーダ装置12が検出した他車両ov2と自車両mvとの距離を当該レーダ装置12から取得し、当該自車両mvの位置を原点とした座標系で他車両ov2の位置(Lx2、Ly2)を算出する。
【0064】
そして、運転支援ECU11は、位置(Xmv+Lx1、Ymv+Ly1)、位置(Xmv+Lx2、Ymv+Ly2)としたとき、位置(Xmv+Lx1、Ymv+Ly1)と位置(Xmv+Lx2、Ymv+Ly2)とをそれぞれ比較し、位置(x1、y1)とどちらが一致するかを判断する。なお、図1で示した例であると、位置(Xmv+Lx1、Ymv+Ly1)と位置(X1、Y1)とが一致することが予想され、運転支援ECU11は、レーダ装置12は検出した物体のうち他車両ov1とひも付けを行う。また、位置(Xmv+Lx1、Ymv+Ly1)と位置(Xmv+Lx2、Ymv+Ly2)とをそれぞれ比較したとき、位置(x1、y1)と完全に一致する位置である必要はなく、予め定めたれた範囲において一致すればよい。
【0065】
例えば、図1に示すように、自車両mvは、複数の車両(具体的には他車両ov1、他車両ov2)と車車間通信をしている。また、一方で、PCS制御においては、自車両mvの前方の物体と衝突の危険性があるか否かを判断するために、レーダ装置12は、進行方向の前方に存在する複数の物体(車両)を検出している。そのため、レーダ装置12が検出した物体のうち挙動変化(進路変更)が予測される車両とひも付けする必要がある。つまり、上述したステップS16でのひも付け処理を行うことで、例えば、図1に示した他車両ov2ではなく、挙動変化(進路変更)が予測される他車両ov1とひも付けを行うことができ、次のステップS17において当該他車両ov1についてPCS制御の動作態様を変更することができる。
【0066】
なお、上述したひも付けの例は、自車両mvと車両との位置関係でひも付けを行った。しかしながら、例えば、車車間通信で他車両ov1が当該他車両ov1のナンバーを示す情報を発信し、自車両mvにカメラが備わっている場合、当該カメラによってナンバーを認識し、ひも付け処理を行ってもよい。
【0067】
図3の説明に戻って、ステップS17において、運転支援ECU11は、PCS制御の動作基準を変更する。一般的に、運転支援ECU11は、レーダ装置12から出力される情報に基づいて、自車両mvと物体との衝突の危険性があるか否か、衝突が避けられるか否かを判断するとき、レーダ装置12に対する対象物の相対距離、相対速度、および相対位置等が予め定められた一般的な基準に従って判断する。上述したように、上記ステップS16において、他車両ov1とひも付けされているので、レーダ装置12から出力される情報に基づいて、自車両mvと他車両ov1との衝突の危険性があるか否か、衝突が避けられるか否かを判断するとき、上記一般的な基準よりも厳しくする。
【0068】
具体的には、例えば、レーダ装置12で検出した物体と自車両mvとが距離Lまで近づいたときに警告等を行うと設定されている場合、当該距離Lよりも短い値に変更する。これによって、例えば、左折することを予定している他車両ov1と自車両mvとの関係では、例えば、警報を早めに出すことが可能になる。
【0069】
また、自車両mvと物体とが衝突するまでの時間、つまり衝突予測時間(TTC(Time to collision);TTC=相対距離/相対速度)を算出し、当該算出された結果に基づき、TTCが予め定められた時間Tより短かった場合、車両制御システム15に指示し、上述したようなPCS制御を講じる場合、上記予め定められた時間Tよりも短い値に変更する。これによっても、左折することを予定している他車両ov1と自車両mvとの関係では、例えば、警報を早めに出すことが可能になる。
【0070】
なお、上記ステップS14において、運転支援ECU11は、データ送受信装置14によって他車両ov1の経路案内を示す情報を取得した。このとき、経路案内を示す情報に基づいて、他車両ov1が左折するときの左折角度を算出してもよい。図1の例であると、他車両ov1は90°の交差点(T字路)を曲がることを予定しているが、例えば、Y字路のような狭角の交差点を曲がることもある。つまり、他車両ov1は、90°の交差点(T字路)場合、Y字路のような狭角の交差点を曲がる場合と比べて、交差点直前で減速する度合いが大きくなる。すなわち、交差点の角度を示す情報も含めて経路案内を示す情報として運転支援ECU11は取得すれば、交差点の角度に応じてPCS制御の動作基準を変更することも可能となり、より精度の高いPCS制御が可能となる。
【0071】
また、自車両mvのレーダ装置12が他車両ov1を検出してから、他車両ov1がT字路を曲がるまでの時間(タイミング)を考慮して、例えば、警報を早めに出してもよい。
【0072】
さらに、上記ステップS17において、運転支援ECU11は、PCS制御の動作基準を変更したが、例えば、自車両mvが走行している走行路面が2車線以上の場合、当該運転支援ECU11は車両制御システム15に指示し、レーンチェンジを促す報知を自車両mvのドライバーに行ってもよいし、他車両ov1は次のT字路を左折することをドライバーに予め報知してもよい。
【0073】
ステップS18に進んで、運転支援ECU11は、ひも付けを解除するか否かを判断する。具体的には、上述したように、運転支援ECU11は、レーダ装置12が検出した他車両ov1および他車両ov2のうち、挙動変化(進路変更)が予測される車両である他車両ov1として、ひも付けを行っているが、例えば、他車両ov1が車線変更などして、レーダ装置12が検出している物体は他車両ov1ではなくなった場合や、他車両ov1が経路案内を中止した場合や、車車間通信が圏外になった場合など、運転支援ECU11は他車両ov1とのひも付けを解除し(YES)、次のステップS19に処理を進める。
【0074】
図3の説明に戻って、ステップS19において、運転支援ECU11は、自車両mvのSWがOFFされたか否かを判断する。そして、SWがOFFであると判断した場合(YES)、当該フローチャートでの処理を終了する。一方、運転支援ECU11は、自車両mvのSWがOFFされていないと判断した場合(NO)、上記ステップS12に処理を戻す。
【0075】
このように本実施形態によれば、車両に備わったカーナビゲーションシステムの経路案内等の各種情報を取得し、車両の挙動の変化を予測し、当該予測結果に応じてPCS制御の動作基準を変化させることができるので、自車両mvのドライバーは、予め当該自車両mvを減速させたり、予め車間距離をとったりして自車両mvと車両とが接近しすぎないようにすることができる。また、PCS制御についても早いタイミングで行うことができ、より精度の高いPCS制御を行うことが可能となる。
【0076】
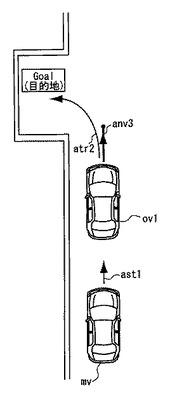
なお、上述の説明では、他車両ov1が左折を予定している場合を例に説明したが、これに限られるものではない。一般的なカーナビゲーションシステムにおいては、経路案内を終了する場合、当該経路案内が終了する地点は目的地周辺である場合が多く、目的地が駐車場のある施設である場合は当該施設の入り口地点を目的地周辺と設定されている場合が多い。そのため、例えば、図5に示すように、他車両ov1の経路案内を示す情報(図5の矢印anv3)が終了する場合、当該他車両ov1は、減速し、矢印atr2方向に左折して目的地に入ると考えられる。つまり、運転支援ECU11は、他車両ov1の経路案内を示す情報が終了することが予定されている場合、上述したようなPCS制御の動作基準を変更してもよい。
【0077】
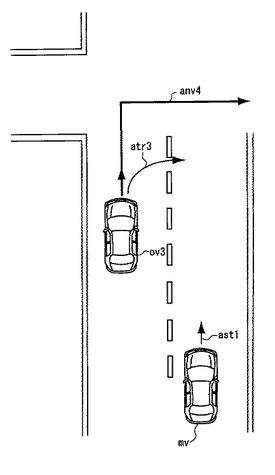
さらに、上述の説明では、他車両ov1が左折を予定している場合を例に説明したが、例えば、図6に示すような場面についても上述したようなPCS制御の動作基準を変更してもよい。図6は、自車両mvと異なる車線で当該自車両mvの前方を走行している他車両ov3を示した図である。例えば、図6に示すように、自車両mvは、図6の矢印ast1の方向に直進しているものとし、他車両ov3は当該自車両mvと異なる車線(自車両mvに対して左車線)で当該自車両mvの前方を走行しているものと仮に想定する。
【0078】
なお、他車両ov3には、上述したデータ送受信装置21およびナビゲーションシステム22がそれぞれ備わっているものとする。
【0079】
ここで、例えば、他車両ov3に備わったカーナビゲーションシステム22の経路案内が、この先の十字路(交差点)を右折する案内の場合、つまり他車両ov3に備わったカーナビゲーションシステム22が図6の矢印anv4方向に当該他車両ov3を案内することを予定している場合、当該十字路を右折するために車線を変更(図6の矢印atr3方向に進路変更)する可能性が高いと考えられる。すなわち、自車両mvと同じ車線に進入してくることが予想される。
【0080】
運転支援ECU11は、データ送受信装置14によって、他車両ov3の経路案内を示す情報が図6の矢印anv4方向であると認識した場合、例えば、レーダ装置12で検出した物体と自車両mvとが距離Lまで近づいたときに警告等を行うと設定されている場合、当該距離Lよりも短い値に変更してもよい。また、自車両mvと物体とが衝突するまでの時間、つまり衝突予測時間(TTC(Time to collision);TTC=相対距離/相対速度)を算出し、当該算出された結果に基づき、TTCが予め定められた時間Tより短かった場合、車両制御システム15に指示し、上述したようなPCS制御を講じる場合、上記予め定められた時間Tよりも短い値に変更してもよい。
【0081】
さらに、運転支援ECU11は、他車両ov3は次の十字路(交差点)を左折することをドライバーに予め報知してもよい。
【0082】
(第2の実施形態)
次に、第2の実施形態に係る衝突予測装置について図面を参照しつつ説明する。なお、第2の実施形態においても上述した第1の実施形態と同様に、当該衝突予測装置を含むドライバーサポートシステム1が、自車両mvに搭載される場合を想定して説明する。
【0083】
また、以下の第2の実施形態の説明では、上述した第1の実施形態と異なる点についてのみ説明し、同様の動作については、その説明は省略し、同様の構成要素は同じ参照符号を付して、その説明は省略する。
【0084】
なお、以下の説明において、自車両mv以外の車両のことを単に車両と称する。
【0085】
まず、第2の実施形態において、上述した第1の実施形態と異なる点を簡単に説明すると以下の通りである。上述した第1の実施形態においては、車両に備わったカーナビゲーションシステムの経路案内を示す情報を取得し、車両の挙動の変化を予測し、当該予測結果に応じてPCS制御の動作態様を変化させるものであった。第2の実施形態においては、車両に備わったカーナビゲーションシステムの経路案内を示す情報に加えて、自車両mvと車両とが走行している走行路面の周囲の状況を示す情報を取得し、当該周囲の状況を示す情報に応じてPCS制御の動作態様を変化させるものである。
【0086】
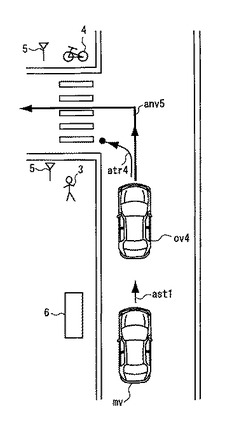
図7は、自車両mvの前方に先行車両が存在する場面の一例を示した図である。なお、自車両mvの前方の車両のことを他車両ov4と称する。また、他車両ov4には、上述したデータ送受信装置21およびナビゲーションシステム22が備わっているものとする。
【0087】
図7に示すように、自車両mvは、図7の矢印ast1の方向に直進しているものとし、当該自車両mvの前方には他車両ov4が存在しているものとする。なお、図7に示した走行路面は、他車両ov1の前方がT字路になっており、さらに、そのT字路を左折した先には横断歩道があるものとする。
【0088】
ここで、例えば、他車両ov4に備わったカーナビゲーションシステム22の経路案内が、この先のT字路を左折する場合、つまり他車両ov4に備わったカーナビゲーションシステムが図7の矢印anv5方向に当該他車両ov4を案内することを予定している場合を想定する。また、このとき、図7に示すように歩行者3や自転車4がいるとき、他車両ov4は、図7の矢印atr4の方向に進むことも予想されるが、歩行者3や自転車4がいるので、一旦停止する可能性の方が高いと考えられる。
【0089】
つまり、本実施形態では、自車両mvは、他車両ov4の経路案内を示す情報に加えて、自車両mvと車両とが走行している走行路面の周囲の状況を示す情報に応じてPCS制御の動作態様を変化させるものである。
【0090】
具体的には、図7に示すように、横断歩道を渡ろうとしている歩行者3や自転車4は、センサ5によって検出され、横断歩道を渡ろうとしている歩行者3や自転車4がいることを示す情報を、センサ5が道路側に設置された光ビーコン(beacon)6に送信する。そして、横断歩道を渡ろうとしている歩行者3や自転車4がいることを示す情報を、光ビーコンから自車両mvに搭載されたデータ送受信装置14および/または他車両ov4に搭載されたデータ送受信装置21に送信される。
【0091】
これによって、自車両mvのドライバーは、他車両ov4がT字路で一旦停止する可能性が高いと認識し、自車両mvを減速させ、予め車間距離をとって自車両mvと他車両ov4とが接近しすぎないようにすることができるし、PCS制御についても早いタイミングで行うことができ、より精度の高いPCS制御を行うことが可能となる。
【0092】
以下、図3のフローチャートを再度、参照して、第2の実施形態に係る運転支援ECU11の動作の一例について説明する。
【0093】
上述した第1の実施形態では、図3のステップS14において、運転支援ECU11は、車車間通信を行って、車両から情報を取得することができたか否かを判断した。本実施形態では、ナビゲーションシステム22およびデータ送受信装置21が備わっている他車両ov4から、当該ナビゲーションシステム22によって求められている他車両ov4の現在位置を示す情報および経路案内を示す情報に加えて、光ビーコン6から横断歩道を渡ろうとしている歩行者3や自転車4がいることを示す情報を取得することができたか否かを判断すればよい。
【0094】
そして、本実施形態では、次のステップS15において、運転支援ECU11は、上記ステップS14で取得した現在位置を示す情報および経路案内を示す情報、および光ビーコン6からの情報に基づいて、レーダ装置12で検出した車両は直進するか否か、先の交差点に歩行者等がいるか否かを判断する。つまり、本実施形態におけるステップS15においては、図7に示すように、運転支援ECU11は、他車両ov4が、直進せず、左折して図7の矢印atr4の方向に挙動変化(進路変更)すると予測され、かつ横断歩道を渡ろうとしている歩行者等がいる場合に当該ステップS15での判断を肯定(YES)する。
【0095】
また、道路側に設置された光ビーコン6からの情報は、自車両mvに備わっているデータ送受信装置14によって受信してもよいし、例えば、他車両ov4に備わっているデータ送受信装置21が道路側に設置された光ビーコン6からの情報を取得した場合、自車両mvは、他車両ov4から光ビーコン6からの情報を取得してもよい。
【0096】
さらに、例えば、他車両ov4にレーダ装置が搭載されているとき(図示せず)、当該他車両ov4に搭載されたレーダ装置によって、他車両ov4の前方の物体(具体的には、歩行者等)を検出可能な場合には、当該レーダ装置によって検出した、横断歩道を渡ろうとしている歩行者3や自転車4がいることを示す情報を他車両ov4のデータ送受信装置21から自車両mvに発信してもよい。
【0097】
なお、図3のステップS16以降の処理は、本実施形態においても上述した第1の実施形態と同様の処理が適用可能であるので説明は省略するが、図3のステップS17の処理は、上述した第1の実施形態での処理と異なる処理をするのが好ましい。つまり、上述したように、横断歩道を渡ろうとしている歩行者3や自転車4がいる場合、他車両ov4は、一旦停止する可能性の方が高いと考えられる。より具体的には、T字路に歩行者3や自転車4がいない場合、他車両ov4は、減速しながら当該T字路を左折するが、T字路に歩行者3や自転車4がいる場合、他車両ov4は左折する前に急停止する可能性もある。従って、本実施形態における図3のステップS17の処理は、上述した第1の実施形態で説明した、レーダ装置12で検出した他車両ov4と自車両mvとが距離Lまで近づいたときに警告等を行うと設定されている場合、当該距離Lよりも、さらに短い値に変更することが好ましい。
【0098】
さらに、本実施形態における図3のステップS17の処理は、上述した第1の実施形態で説明した、自車両mvと他車両ov4とが衝突するまでの時間、つまり衝突予測時間(TTC(Time to collision);TTC=相対距離/相対速度)を算出し、当該算出された結果に基づき、TTCが予め定められた時間Tより短かった場合、車両制御システム15に指示し、上述したようなPCS制御を講じる場合、上記予め定められた時間Tよりも、さらに短い値に変更することが好ましい。
【0099】
また、運転支援ECU11は、他車両ov4は次のT字路を左折する前に一旦停止することをドライバーに予め報知してもよい。
【0100】
このようにすれば、他車両ov4は左折する前に急停止する場合でも、より早いタイミングPCS制御を行うことができ、より精度の高いPCS制御を行うことが可能となる。
【0101】
なお、上述した本実施形態の説明では、自車両mvの前方に先行車両が存在する場面で、他車両ov1の前方がT字路になっており、さらに、そのT字路を左折した先には横断歩道がある例を説明したがこれに限られるものではない。
【0102】
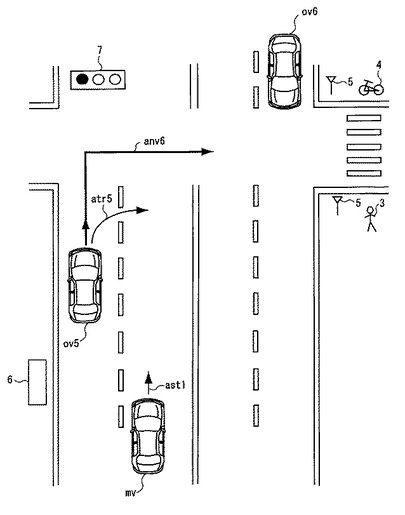
例えば、図8のような場面も想定できる。図8は、信号機7や横断歩道が存在する十字路(交差点)の一例を示した図である。図8に示すように、例えば、自車両mvは、図8の矢印ast1の方向に直進しているものとし、他車両ov5は当該自車両mvと同じ進行方向で異なる車線(自車両mvに対して左車線)で当該自車両mvの前方を走行し、また自車両mvに対して右側に対向車線が存在するものと仮に想定する。また、図8に示すように、図8の交差点の信号機7は赤(停止)であり、対向車線の他車両ov6は信号待ちをしているものとする。
【0103】
なお、他車両ov5および他車両ov6には、上述したデータ送受信装置21およびナビゲーションシステム22がそれぞれ備わっているものとする。
【0104】
そして、さらに、他車両ov5に備わったカーナビゲーションシステム22の経路案内が、この先の十字路(交差点)を右折する案内の場合、つまり他車両ov5に備わったカーナビゲーションシステム22が図8の矢印anv6方向に当該他車両ov5を案内することを予定している場合、当該十字路を右折するために他車両ov5は車線を変更(図8の矢印atr5の方向)する可能性が高いと考えられる。
【0105】
また、その一方で、信号機7が赤であるので、他車両ov5は車線変更した後、直ぐに停止することも考えられるし、信号機7が青に変わっても対向車(他車両ov6)が直進を予定している場合、交差点内で他車両ov5は停止することも考えられる。さらに、自車両は、交差点を通過した後も歩行者3や自転車4がいるので、一旦停止する可能性の方が高いとも考えられる。
【0106】
このような場面においても、運転支援ECU11は、他車両ov5のナビゲーションシステム22によって求められている他車両ov5の現在位置を示す情報および経路案内を示す情報に加えて、光ビーコン6から横断歩道を渡ろうとしている歩行者3や自転車4がいることを示す情報、信号機7の情報、および対向車(他車両ov6)の経路案内を示す情報を取得すればよい。そして、上記各種情報に基づいて、上述したようにPCS制御の動作態様を変化させてもよい。
【0107】
なお、上述した第1の実施形態および第2の実施形態では、車両が左側通行である国(例えば日本国内)の走行路面を自車両mvが走行しているものとして説明した。しかしながら、これに限らず、車両が右側通行である国(例えば米国、欧州など)の走行路面を自車両mvが走行している場合も適用できることは言うまでもない。
【0108】
上記実施形態で説明した態様は、単に具体例を示すものであり、本願発明の技術的範囲を何ら限定するものではない。よって、本願の効果を奏する範囲において、任意の構成を採用することが可能である。
【産業上の利用可能性】
【0109】
本発明に係る衝突予測装置は、車両に搭載され他車両の挙動を予測し、より精度の良いPCS制御を行うことのできる衝突予測装置等として利用できる。
【符号の説明】
【0110】
11…運転支援ECU
12…レーダ装置
13、21…データ送受信装置
14…車両制御システム
13、22…カーナビゲーションシステム
3…歩行者
4…自転車
5…センサ
6…光ビーコン
7…信号機
【技術分野】
【0001】
本発明は、衝突予測装置に関し、より特定的には、車両に搭載され他車両の挙動を予測し、より精度の良いPCS制御を行うことのできる衝突予測装置に関する。
【背景技術】
【0002】
近年、自車両の前方から接近してくる物体(例えば他車両)を対象物として検出して、当該対象物と自車両とが衝突する危険があるか否かを判断し、当該対象物との衝突の危険性が高い場合に警報等によりドライバーに対して警告を行ったり、自車両に備わったブレーキ装置を制御して当該自車両のドライバーが行うブレーキ操作をアシストしたりする、いわゆる衝突回避制御(PCS(Pre-Clash Safety)制御と称すこともある)を行うことのできる装置が実用化されている。
【0003】
具体的には、上記PCS制御は、一般的には、自車両に備わったレーダ装置により当該自車両の前方の物体を対象物として検出し、当該検出された対象物と自車両との位置関係等に基づき、自車両が上記対象物を回避可能か否かを判断することによって行われる。
【0004】
また、その一方で、自車両の前方を走行している他車両の突然の右左折を予測して、例えば、警報等によりドライバーに対して行う警告等を早いものにすれば、より精度の良いPCS制御を行うことができ、このようなことが望まれている。
【0005】
例えば、自車両の前方を走行している他車両の位置や動きを判断する方法として、自車両に備わったカメラにより、当該自車両の前方を走行している他車両の方向指示器の点滅を認識する方法がある。しかしながら、例えば、自車両の前方を走行している他車両が方向指示器を出さずに右左折した場合、この方法を用いることは難しい。
【0006】
また、例えば、他車両の位置を精度良く把握することのできる技術として、特許文献1に開示されている技術がある。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開2007−241726号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
上記特許文献1に開示されている技術は、他車両の位置を精度良く把握することによって、当該ドライバーの運転支援を行う運転支援システムである。具体的には、自車両は、車車間通信によって、他車両から当該他車両の案内経路情報や方向指示器の動作を示す情報を取得する。この場合、例えば、他車両の右折の方向指示器が作動していれば、当該他車両は右折する可能性が高いため、右折後の道路上の位置を当該他車両の位置として推定してもよいとするものである。これによって、他車両の位置を精度良く把握することができるものである。
【0009】
しかしながら、上記特許文献1に開示されている技術は、他車両の位置を精度良く把握することができるものの、例えば、他車両は右折する可能性が高いと判断された場合におけるリスク、つまり他車両の挙動の変化におけるリスクまで考慮されておらず、精度の良いPCS制御を行うことができない。
【0010】
本発明は、上記事情に鑑みてなされたものであり、その目的とするところは、簡易な方法で他車両の挙動を予測し、より精度の良いPCS制御を行うことのできる衝突予測装置を提供することにある。
【課題を解決するための手段】
【0011】
上記目的を達成するために、本発明は以下の構成を採用した。すなわち第1の発明は、自車両前方の他車両と当該自車両とが衝突するか否かを予測する衝突予測装置である。上記衝突予測装置は、上記自車両前方の他車両を検出する検出手段と、当該検出手段によって検出された上記他車両と上記自車両とが衝突する危険性が高いと判断した場合に衝突危険回避動作を行う衝突危険回避手段と、上記他車両に備わったナビゲーションシステムによって得られた当該他車両の位置情報および当該他車両の経路案内情報を車車間通信を介して受信する受信手段と、上記他車両の位置情報および上記他車両の経路案内情報に基づいて当該他車両の挙動を予測する予測手段と、当該予測手段によって予測された上記他車両の挙動が予め定められた第1条件を満たす場合に上記衝突危険回避手段が行う上記衝突危険回避動作のタイミングを上記第1条件を満たなかった場合より早くする動作変更手段とを備える。
【0012】
第2の発明は、上記第1の発明において、上記自車両の位置情報を算出する位置情報算出手段をさらに備える。また、上記受信手段によって受信することのできた位置情報は上記検出手段が検出した上記他車両に備わったナビゲーションシステムによって得られた位置情報であるか否かを上記自車両の位置情報に基づき判断することを特徴とする。
【0013】
第3の発明は、上記第1または第2の発明において、上記第1条件は上記他車両が急減速するか否か、車線変更するか否か、右左折するか否かの上記他車両の挙動の変化の少なくとも何れか1つである。そして、上記動作変更手段は上記予測手段によって上記第1条件の少なくとも何れか1つが予測された場合、上記衝突危険回避手段が行う上記衝突危険回避動作を行うタイミングを上記第1条件の少なくとも何れか1つが予測されなかった場合より早くすることを特徴とする。
【0014】
第4の発明は、上記第1または第2の発明において、上記受信手段は上記他車両から2以上の道路が交わる箇所までの距離および当該道路の右左折角度の少なくとも何れか1つをさらに受信する。そして、上記動作変更手段は上記距離および上記右左折角度の少なくとも何れか1つが予め定められた第2条件を満たした場合、上記衝突危険回避手段が行う上記衝突危険回避動作のタイミングを上記第2条の少なくとも何れか1つを満たさなかった場合より早くすることを特徴とする。
【0015】
第5の発明は、上記第4の発明において、上記第2条件は上記距離が予め定められた距離より短いか否か、上記右左折角度が予め定められた値を超えるか否かの少なくとも何れか1つであることを特徴とする。
【0016】
第6の発明は、上記第1または第2の発明において、道路に存在する物体の情報を当該道路に設置された通信設備から受信する情報受信手段をさらに備える。また、上記予測手段は、上記他車両の位置情報と上記他車両の経路案内情報と上記物体の情報とに基づいて上記他車両は急減速するか否か、停止するか否か、車線変更するか否か、右左折するか否かの上記他車両の挙動の少なくとも何れか1つを予測する。そして、上記動作変更手段は上記予測手段によって上記挙動の少なくとも何れか1つが予測された場合、上記衝突危険回避手段が行う衝突危険回避動作を行うタイミングを上記挙動の少なくとも何れか1つが予測されなかった場合より早くすることを特徴とする。
【0017】
第7の発明は、上記第1または第2の発明において、上記衝突危険回避手段が行う上記衝突危険回避動作は上記自車両の運転者に対する警告および上記他車両の挙動に関する情報の報知の少なくと1つを含むことを特徴とする。
【発明の効果】
【0018】
上記第1の発明によれば、車両に備わったカーナビゲーションシステムの経路案内等の各種情報を取得し、車両の挙動の変化を予測し、当該予測結果に応じてPCS制御の動作基準を変化させることができるので、自車両mvのドライバーは、予め当該自車両mvを減速させたり、予め車間距離をとったりして自車両mvと車両とが接近しすぎないようにすることができる。また、PCS制御についても早いタイミングで行うことができ、より精度の高いPCS制御を行うことが可能となる。つまり、車載カーナビからの情報を取得するといった、簡易な方法で他車両の挙動を予測し、より精度の良いPCS制御を行うことができる。
【0019】
上記第2の発明によれば、例えば、レーダ装置が、自車両の進行方向の前方に存在する複数の物体(車両)を検出し、さらに当該複数の複数の物体(車両)と車車間通信をしている場合、レーダ装置で検出した物体のうち、挙動変化をする物体を特定することができ、当該特定された物体に対してPCS制御の動作態様を変更することができる。
【0020】
上記第3の発明によれば、他車両の様々な挙動変化に応じてPCS制御を早いタイミングで行うことができる。
【0021】
上記第4および上記第5の発明によれば、例えば、交差点の右左折角度を考慮して衝突危険回避動作を早いタイミングで行うことができる。つまり、例えば、90°の交差点(T字路)場合、Y字路のような狭角、つまり右左折角度の小さい交差点を曲がる場合と比べて、交差点直前で減速する度合いが大きくなる。すなわち交差点の角度に応じてPCS制御の動作基準を変更することも可能となり、より精度の高いPCS制御が可能となる。さらに、例えば交差点までの距離が短い場合、他車両はすぐに右左折することが予測されるので、交差点までの距離に応じてPCS制御の動作基準を変更することも可能となり、より精度の高いPCS制御が可能となる。
【0022】
上記第6の発明によれば、例えば、他車両が右左折した先に歩行者がいる場合などにおいても、より精度の高いPCS制御を行うことが可能となる。
【0023】
上記第7の発明によれば、運転者に対する警告および前記他車両の挙動に関する情報の報知が早いタイミングで行うことができるので、自車両のドライバーは、当該自車両を減速させ、予め車間距離をとって自車両と他車両とが接近しすぎないようにすることができる。
【図面の簡単な説明】
【0024】
【図1】自車両mvの前方に車両が存在する場面の一例を示した図
【図2】衝突予測装置を含むドライバーサポートシステム1の構成の一例を示すブロック図
【図3】第1の実施形態に係る衝突予測装置を含むドライバーサポートシステムの運転支援ECU11の動作の一例を示したフローチャート
【図4】自車両mvの進行方向の前方に存在する物体と自車両mvとの位置関係を示す図
【図5】他車両ov1の経路案内を示す情報が終了する場合の一例を示す図
【図6】自車両mvと異なる車線で当該自車両mvの前方を走行している他車両ov1を示す図
【図7】自車両mvの前方に先行車両が存在する場面の一例を示した図
【図8】信号や横断歩道が存在する十字路(交差点)の一例を示した図
【発明を実施するための形態】
【0025】
(第1の実施形態)
以下、図面を参照しつつ、第1の実施形態に係る衝突予測装置について説明する。なお、本実施形態では、当該衝突予測装置を含むドライバーサポートシステム(DSS(Driver Support System))が、車両(以下、自車両mvと称す)に搭載される場合を想定して説明する。
【0026】
具体的には、本実施形態に係る衝突予測装置を含むドライバーサポートシステムは、自車両mvの前方の物体を対象物として検出する検出装置の一例としてレーダ装置を備え、当該レーダ装置から得られる情報に基づいて、自車両mvの前方の物体(具体的には他車両)を対象物として検出し、当該対象物と自車両mvとが衝突する危険があるか否かを判断し、当該対象物との衝突の危険性が高い場合、自車両mvに搭載されている各種装置に指示し、警報等によりドライバーに対して警告を行ったり、ドライバーが行うブレーキ操作をアシストしたりする、いわゆる衝突回避制御を行う(以下、PCS(Pre-Clash Safety)制御と称す)ことを想定して、以下説明する。
【0027】
さらに、本実施形態に係る衝突予測装置を含むドライバーサポートシステムは、当該自車両mvの前方を走行している先行車両から発信される情報に基づき、PCS制御の動作態様を変化させるものである。
【0028】
ここで、図1を用いて、本実施形態に係る衝突予測装置を含むドライバーサポートシステムの概要について簡単に説明する。
【0029】
図1は、自車両mvの前方に先行車両が存在する場面の一例を示した図である。なお、以下の説明において、自車両mvと同じ車線で当該自車両mvの先行車両を特に他車両ov1と称し、自車両mvと異なる車線で当該自車両mvの先行車両を特に他車車両ov2と称する。また、他車両ov1と他車両ov2とを特に区別する場合を除き、自車両mv以外の車両のことを単に車両と称する。
【0030】
図1に示すように、自車両mvは、図1の矢印ast1の方向に直進しているものとし、当該自車両mvの前方には他車両ov1および他車両ov2が存在しているものとする。なお、図1に示した走行路面のように、他車両ov1の前方がT字路になっている場合、当該他車両ov1は、左折せず図1の矢印ast2の方向に直進することも考えられるし、左折して図1の矢印atr1の方向に進むとも考えられる。ここで、他車両ov1が早めに左折を示す方向指示器を出していた場合、自車両mvのドライバーは、他車両ov1は左折するので減速する可能性があると認識し、自車両mvを減速させ、予め車間距離をとって自車両mvと他車両ov1とが接近しすぎないようにすることができる。しかしながら、例えば、他車両ov1が方向指示器を出すタイミングが遅い場合など、自車両mvのドライバーは、自車両mvを減速させ、予め車間距離をとることは難しい。
【0031】
ここで、例えば、他車両ov1に備わったカーナビゲーションシステムの経路案内が、この先のT字路を左折する案内の場合、つまり他車両ov1に備わったカーナビゲーションシステムが図1の矢印anv1方向に当該他車両ov1を案内することを予定している場合、左折して図1の矢印atr1の方向に進む可能性が高いと考えられる。
【0032】
例えば、自車両mvのドライバーが上述したような他車両ov1の動きを予め知ることができれば、自車両mvを減速させ、予め車間距離をとって自車両mvと他車両ov1とが接近しすぎないようにすることができるし、PCS制御についても早いタイミングで行うことができ、より精度の高いPCS制御を行うことが可能となる。つまり、本実施形態に係る衝突予測装置を含むドライバーサポートシステムは、車両に備わったカーナビゲーションシステムの経路案内等の各種情報を取得し、車両の挙動の変化を予測し、当該予測結果に応じてPCS制御の動作態様を変化させるものである。
【0033】
次に、図面を参照しつつ、本発明の第1の実施形態に係る衝突予測装置を含むドライバーサポートシステム1の構成および動作について説明する。
【0034】
図2は、上記衝突予測装置を含むドライバーサポートシステム1の構成の一例を示すブロック図である。なお、図2に示した各構成および、後述する動作の説明は、本発明に係る衝突予測装置の構成および動作の単に一例に過ぎず、本願の効果を奏する範囲において、任意の構成を採用することが可能である。また図2には本実施形態での説明に必要な構成についてのみ示してある。
【0035】
図2に示すように、本発明の第1の実施形態に係る衝突予測装置を含むドライバーサポートシステム1は、運転支援ECU(Electronic Control Unit)11、レーダ装置12、ナビゲーションシステム13、データ送受信装置14を備えている。なお、上記運転支援ECU11には、車両制御システム15が接続されている。
【0036】
運転支援ECU11は、レーダ装置12から出力される情報を用いて、車両制御システム15に指示し、ドライバーの運転をサポートする。具体的には、運転支援ECU11は、後述するレーダ装置12から取得した信号を用いて、自車両mvに対する対象物の位置、速度、距離等の情報を算出する。例えば、運転支援ECU11は、レーダ装置12が照射した電磁波と受信した反射波との和および差や送受信タイミング等を用いて、レーダ装置12に対する対象物の相対距離、相対速度、および相対位置等を算出する。そして、運転支援ECU11は当該情報に基づいて、車両制御システム15に指示し、上述したようなPCS制御を行う。
【0037】
なお、運転支援ECU11は、請求項に記載の衝突回避手段、予測手段、動作変更手段の一例に相当する。
【0038】
また、詳細は後述するが、運転支援ECU11は、データ送受信装置14が受信した、自車両mvの前方を走行している車両(図1の例であると他車両ov1および他車両ov2)から発信される情報に基づき、車両制御システム15に指示し、PCS制御の動作態様を変化させる。
【0039】
次に、レーダ装置12は、自車両mvの所定の位置(例えば、自車両mvの前部の中央)に設置され、自車両mvの外側に向けて電磁波を照射し、自車両mvの前方を監視している。例えば、レーダ装置12は、自車両mvの前方に向けて電磁波を照射し、当該レーダ装置12の検出範囲内に存在する物体(図1の例であると他車両ov1および他車両ov2)を対象物として検出する。なお、レーダ装置12は請求項に記載の検出手段の一例に相当する。
【0040】
ナビゲーションシステム13は、自車両mvの現在位置を測位したり、電子地図等を用いて自車両mvを目的地へ誘導したりする、いわゆる車載カーナビである。なお、ナビゲーションシステム13は、いわゆる車載カーナビである必要はなく、少なくとも自車両mvの位置を測位することのできる装置であればよい。
【0041】
データ送受信装置14は、例えば他車両ov1に備わったデータ送受信装置21から発信される情報を取得したり、他車両ov1に備わったデータ送受信装置21へ向けて情報を発信したりする。なお、データ送受信装置14は、例えば、他のデータ送受信装置とデータのやりとりのできる装置であれば特に限定されるものではなく、例えば、無線LAN(IEEE 802.11b/g)等を利用すればよい。また、データ送受信装置14は請求項に記載の受信手段、情報受信手段の一例に相当する。
【0042】
また、本実施形態の説明においては、他車両ov1にも、上述したデータ送受信装置21とに加え、ナビゲーションシステム22が備わっているものとする。なお、他車両ov1に備わっているナビゲーションシステム22は、いわゆる車載カーナビのことであり、上述した自車両mvに備わっているナビゲーションシステム22と同様の機能を有するもものであればよい。
【0043】
なお、図示は省略したが、他車両ov2にも、他車両ov1と同様にデータ送受信装置とナビゲーションシステムとが備わっているものとする。
【0044】
また、本実施形態での説明では、通信形態として自車両mvと車両とで車車間通信(図1で示した例であると、他車両ov1や他車両ov2)を行うことを前提に説明するが、道路側に設置されたインフラ設備と自車両mvとの間等の様々な通信形態においても実現可能である。また、相互に通信可能な車両は、自車両mvや他車両ov1や他車両ov2に限定されず、データ送受信装置の通信範囲内で自車両mv周辺に存在するデータ送受信装置を装備した車両の情報が入手可能なものとする。さらに、データ送受信装置は、自車両mvが停車中においても当該自車両mvの各種情報を常時送信可能、および外部からの各種情報を常時受信可能な状態にあるものとする。
【0045】
図3の説明に戻って、車両制御システム15は、警告灯等の表示装置、警報ブザーなどの警報装置等(それぞれ図示せず)から構成され、運転支援ECU11からの指示に従いPCS制御を行うものである。具体的には、運転支援ECU11がレーダ装置2から出力された情報に基づき、当該レーダ装置2が検出した対象物と自車両mvとが衝突する危険性があると判断した場合、車両制御システム15(具体的には上記表示装置や上記警報装置等)は、自車両mvのドライバーに注意喚起を促す。
【0046】
また、車両制御システム15には、自車両mvのドライバーが当該自車両mvと対象物との衝突の危険を回避するために行うブレーキ操作をアシストする危険回避装置も含まれる。さらに、車両制御システム15には、運転支援ECU11が自車両mvと対象物との衝突が避けられないと判断したときに、シートベルトを巻き取ったり、シートを駆動させたりすることにより自車両mvの乗員の拘束性を高め、衝突被害を低減する衝突被害低減装置も含まれる。なお、当該衝突被害低減装置の動作として、エアバッグのセーフィング解除をしたり、シートポジションを衝突に備えたポジションに変更したりすることなどがある。なお、上述した車両制御システム15に含まれる装置は一例であり、これらの装置に限られるものではない。なお、上述した衝突被害を低減するために各種装置によって行われる動作および衝突を回避するために各種装置によって行われる動作を総称して、単に衝突危険回避と称し、当該衝突危険回避動作は請求項に記載の衝突危険回避動作に相当すする。
【0047】
次に、図3を参照して、運転支援ECU11の動作の一例について説明する。図3は、第1の実施形態に係る衝突予測装置を含むドライバーサポートシステム1の運転支援ECU11の動作の一例を示したフローチャートである。
【0048】
図3に示したフローチャートでの処理は、運転支援ECU11内にそれぞれ備わった図示しない記憶部に記憶されている所定のプログラムを実行することにより行われる。また、図3に示すフローチャートでの処理は、衝突予測装置を含むドライバーサポートシステム1の電源がON(例えば、衝突予測装置を含むドライバーサポートシステム1が搭載された自車両mvの始動/停止スイッチがON)されることによって開始され、OFFされることによって終了する。なお、始動/停止スイッチは、以下SWと略す。
【0049】
図3のステップS11において、運転支援ECU11は、自車両mvのSWがONであるか否かを判断する。そして、SWがONであると判断した場合(YES)、次のステップS12に処理を進める。一方、運転支援ECU1は、自車両mvのSWがONではない、つまりSWがOFFであると判断した場合(NO)、当該フローチャートでの処理を終了する。
【0050】
ステップS12において、運転支援ECU11は、レーダ装置12から物体を検出した信号を取得し、次のステップS13に処理を進める。また、レーダ装置12が物体を検出しなかった場合(具体的には、自車両mvの前方に物体が存在しなかった場合)、当該レーダ装置12は、物体は無しであることを示す信号を運転支援ECU11に出力する。また、本実施形態においては、レーダ装置12は、複数の物体を検出することが可能であるものとし、より具体的にはレーダ装置12は、自車両mvの進行方向の前方に存在する物体(図1の例であると他車両ov1および他車両ov2)を検出するものとする。なお、図1で示した例の場合、レーダ装置12によって他車両ov1および他車両ov2が検出される。
【0051】
ステップS13において、運転支援ECU11は、レーダ装置12が検出した物体はあるか否かを判断する。具体的には、運転支援ECU11は、上記ステップS12でレーダ装置12から取得した信号に基づいて、レーダ装置12は、物体を検出したか否かを判断する。そして、運転支援ECU11によって、判断が肯定された場合(YES)、次のステップS14に処理を進める。一方、運転支援ECU11によって、判断が否定された場合(NO)、ステップS12に戻って再び信号を取得する。
【0052】
ステップS14において、運転支援ECU11は、車車間通信を行って、車両から情報を取得することができたか否かを判断する。例えば、図1に示した例であると、ナビゲーションシステム22およびデータ送受信装置21が備わっている他車両ov1からは、当該ナビゲーションシステム22によって求められている他車両ov1の現在位置を示す情報および経路案内を示す情報がデータ送受信装置21によって発信されている。そして、運転支援ECU11は、自車両mvに備わっているデータ送受信装置14によって他車両ov1の現在位置を示す情報および経路情報を示す情報を取得(受信)することができたか否かを判断する。なお、図1に示した他車両ov2からも上述したような情報を取得してもよい。
【0053】
そして、他車両ov1および/または他車両ov2の現在位置を示す情報および経路案内を示す情報を取得(受信)することができた場合、当該ステップS14の判断を肯定(YES)し、次のステップS15に処理を進める。一方、運転支援ECU11は、他車両ov1および/または他車両ov2の現在位置を示す情報および経路案内を示す情報を取得(受信)することができなかった場合、判断を否定(NO)し、ステップS12に処理を戻す。なお、当該ステップS14での判断が否定される場合とは、例えば、レーダ装置12は、物体を検出したが、当該物体(具体的には車両)にナビゲーションシステムおよびデータ送受信装置等が備わっていなかった場合などが考えられる。
【0054】
ステップS15において、運転支援ECU11は、上記ステップS14で取得した現在位置を示す情報および経路案内を示す情報、特に経路案内を示す情報に基づいて、レーダ装置12で検出した車両は直進するか否かを判断する。具体的には、図1において、他車両ov1は、直進せず、左折して図1の矢印atr1の方向に挙動変化(進路変更)すると予測される。一方、他車両ov2に備わったカーナビゲーションシステムが図1の矢印anv2方向に当該他車両ov2を案内することを予定している場合、当該他車両ov2は、挙動変化(進路変更)はせず、そのまま矢印ast3方向に直進すると予想される。なお、カーナビゲーションシステムによって、図1に示したように、レーダ装置12が検出した物体(車両)の少なくとも1つが直進ではない進路を予定している場合、当該ステップS15の判断は否定される。
【0055】
そして、運転支援ECU11は、当該ステップS15での判断を否定した場合(NO)、次のステップS16に処理を進める。なお、図1の例であると、挙動変化(進路変更)が予想される車両(具体的には他車両ov1)があるので、当該ステップS15の判断は否定される。一方、運転支援ECU11は、当該ステップS15での判断を肯定した場合(YES)、ステップS12に処理を戻す。なお、当該ステップS15での判断が肯定される場合とは、例えば、図1において、他車両ov1も他車両ov2と同様に経路案内を示す情報が左折せず(進路変更せず)直進することを示す場合等である。
【0056】
ステップS16において、運転支援ECU11は、ひも付け処理を行う。ここで、ひも付けについて説明すると、本実施形態における、ひも付けとは、レーダ装置12で検出した物体のうち、挙動変化(進路変更)が予測される物体は、どの物体であるか否かを判断することである。
【0057】
つまり、図1の例であると、経路案内を示す情報より、他車両ov1は左折する経路案内がされており、他車両ov2は直進する経路案内がされている。そして、運転支援ECU11は、データ送受信装置14を介して、左折する経路案内がされている車両と直進する経路案内がされている車両とが存在することを車車間通信によって認識している。しかしながら、その一方で、レーダ装置12は、自車両mvの前方の他車両ov1および他車両ov2を検出するが、当該レーダ装置12が検出するだけでは他車両ov1および他車両ov2のうち、どちらの車両が他車両ov1は左折する経路案内がされている車両であるか判断できない。
【0058】
そこで、運転支援ECU11は、レーダ装置12が検出した他車両ov1および他車両ov2のうち、挙動変化(進路変更)が予測される車両は、どの車両であるかを判断するし、ひも付けを行う。
【0059】
ここで、図4を参照して、運転支援ECU11が上記ステップS16で行うひも付け処理について簡単に説明する。
【0060】
図4は、自車両mvの進行方向の前方に存在する物体(具体的には他車両ov1および他車両ov2)と自車両mvとの位置関係を示す図である。なお、図4の領域Sは、レーダ装置12の検出範囲を示す。
【0061】
まず、上述したように、ナビゲーションシステム22およびデータ送受信装置21が備わっている他車両ov1からは、当該ナビゲーションシステム22によって求められている他車両ov1の現在位置を示す情報および経路案内を示す情報がデータ送受信装置21によって発信されている。そして、上記ステップS14において、運転支援ECU11は、自車両mvに備わっているデータ送受信装置14によって他車両ov1の現在位置を示す情報および経路情報を取得(受信)した。他車両ov2についても同様。
【0062】
そして、図4に示すように、任意の点を原点とする座標系における自車両mvの位置を位置(Xmv、Ymv)とする。なお、位置(Xmv、Ymv)は、自車両mvに備わっているナビゲーションシステム13により取得することができる。また、任意の点を原点とする座標系における他車両ov1の位置を位置(X1、Y1)とする。なお、位置(X1、Y1)は、他車両ov1に備わっているナビゲーションシステム22により取得することができる。同様に他車両ov2の位置を位置(X2、Y2)とする。
【0063】
一方、運転支援ECU11は、自車両mvに備わっているレーダ装置12が検出した他車両ov1と自車両mvとの距離を当該レーダ装置12から取得し、当該自車両mvの位置を原点とした座標系で他車両ov1の位置(Lx1、Ly1)を算出する。同様に、運転支援ECU11は、自車両mvに備わっているレーダ装置12が検出した他車両ov2と自車両mvとの距離を当該レーダ装置12から取得し、当該自車両mvの位置を原点とした座標系で他車両ov2の位置(Lx2、Ly2)を算出する。
【0064】
そして、運転支援ECU11は、位置(Xmv+Lx1、Ymv+Ly1)、位置(Xmv+Lx2、Ymv+Ly2)としたとき、位置(Xmv+Lx1、Ymv+Ly1)と位置(Xmv+Lx2、Ymv+Ly2)とをそれぞれ比較し、位置(x1、y1)とどちらが一致するかを判断する。なお、図1で示した例であると、位置(Xmv+Lx1、Ymv+Ly1)と位置(X1、Y1)とが一致することが予想され、運転支援ECU11は、レーダ装置12は検出した物体のうち他車両ov1とひも付けを行う。また、位置(Xmv+Lx1、Ymv+Ly1)と位置(Xmv+Lx2、Ymv+Ly2)とをそれぞれ比較したとき、位置(x1、y1)と完全に一致する位置である必要はなく、予め定めたれた範囲において一致すればよい。
【0065】
例えば、図1に示すように、自車両mvは、複数の車両(具体的には他車両ov1、他車両ov2)と車車間通信をしている。また、一方で、PCS制御においては、自車両mvの前方の物体と衝突の危険性があるか否かを判断するために、レーダ装置12は、進行方向の前方に存在する複数の物体(車両)を検出している。そのため、レーダ装置12が検出した物体のうち挙動変化(進路変更)が予測される車両とひも付けする必要がある。つまり、上述したステップS16でのひも付け処理を行うことで、例えば、図1に示した他車両ov2ではなく、挙動変化(進路変更)が予測される他車両ov1とひも付けを行うことができ、次のステップS17において当該他車両ov1についてPCS制御の動作態様を変更することができる。
【0066】
なお、上述したひも付けの例は、自車両mvと車両との位置関係でひも付けを行った。しかしながら、例えば、車車間通信で他車両ov1が当該他車両ov1のナンバーを示す情報を発信し、自車両mvにカメラが備わっている場合、当該カメラによってナンバーを認識し、ひも付け処理を行ってもよい。
【0067】
図3の説明に戻って、ステップS17において、運転支援ECU11は、PCS制御の動作基準を変更する。一般的に、運転支援ECU11は、レーダ装置12から出力される情報に基づいて、自車両mvと物体との衝突の危険性があるか否か、衝突が避けられるか否かを判断するとき、レーダ装置12に対する対象物の相対距離、相対速度、および相対位置等が予め定められた一般的な基準に従って判断する。上述したように、上記ステップS16において、他車両ov1とひも付けされているので、レーダ装置12から出力される情報に基づいて、自車両mvと他車両ov1との衝突の危険性があるか否か、衝突が避けられるか否かを判断するとき、上記一般的な基準よりも厳しくする。
【0068】
具体的には、例えば、レーダ装置12で検出した物体と自車両mvとが距離Lまで近づいたときに警告等を行うと設定されている場合、当該距離Lよりも短い値に変更する。これによって、例えば、左折することを予定している他車両ov1と自車両mvとの関係では、例えば、警報を早めに出すことが可能になる。
【0069】
また、自車両mvと物体とが衝突するまでの時間、つまり衝突予測時間(TTC(Time to collision);TTC=相対距離/相対速度)を算出し、当該算出された結果に基づき、TTCが予め定められた時間Tより短かった場合、車両制御システム15に指示し、上述したようなPCS制御を講じる場合、上記予め定められた時間Tよりも短い値に変更する。これによっても、左折することを予定している他車両ov1と自車両mvとの関係では、例えば、警報を早めに出すことが可能になる。
【0070】
なお、上記ステップS14において、運転支援ECU11は、データ送受信装置14によって他車両ov1の経路案内を示す情報を取得した。このとき、経路案内を示す情報に基づいて、他車両ov1が左折するときの左折角度を算出してもよい。図1の例であると、他車両ov1は90°の交差点(T字路)を曲がることを予定しているが、例えば、Y字路のような狭角の交差点を曲がることもある。つまり、他車両ov1は、90°の交差点(T字路)場合、Y字路のような狭角の交差点を曲がる場合と比べて、交差点直前で減速する度合いが大きくなる。すなわち、交差点の角度を示す情報も含めて経路案内を示す情報として運転支援ECU11は取得すれば、交差点の角度に応じてPCS制御の動作基準を変更することも可能となり、より精度の高いPCS制御が可能となる。
【0071】
また、自車両mvのレーダ装置12が他車両ov1を検出してから、他車両ov1がT字路を曲がるまでの時間(タイミング)を考慮して、例えば、警報を早めに出してもよい。
【0072】
さらに、上記ステップS17において、運転支援ECU11は、PCS制御の動作基準を変更したが、例えば、自車両mvが走行している走行路面が2車線以上の場合、当該運転支援ECU11は車両制御システム15に指示し、レーンチェンジを促す報知を自車両mvのドライバーに行ってもよいし、他車両ov1は次のT字路を左折することをドライバーに予め報知してもよい。
【0073】
ステップS18に進んで、運転支援ECU11は、ひも付けを解除するか否かを判断する。具体的には、上述したように、運転支援ECU11は、レーダ装置12が検出した他車両ov1および他車両ov2のうち、挙動変化(進路変更)が予測される車両である他車両ov1として、ひも付けを行っているが、例えば、他車両ov1が車線変更などして、レーダ装置12が検出している物体は他車両ov1ではなくなった場合や、他車両ov1が経路案内を中止した場合や、車車間通信が圏外になった場合など、運転支援ECU11は他車両ov1とのひも付けを解除し(YES)、次のステップS19に処理を進める。
【0074】
図3の説明に戻って、ステップS19において、運転支援ECU11は、自車両mvのSWがOFFされたか否かを判断する。そして、SWがOFFであると判断した場合(YES)、当該フローチャートでの処理を終了する。一方、運転支援ECU11は、自車両mvのSWがOFFされていないと判断した場合(NO)、上記ステップS12に処理を戻す。
【0075】
このように本実施形態によれば、車両に備わったカーナビゲーションシステムの経路案内等の各種情報を取得し、車両の挙動の変化を予測し、当該予測結果に応じてPCS制御の動作基準を変化させることができるので、自車両mvのドライバーは、予め当該自車両mvを減速させたり、予め車間距離をとったりして自車両mvと車両とが接近しすぎないようにすることができる。また、PCS制御についても早いタイミングで行うことができ、より精度の高いPCS制御を行うことが可能となる。
【0076】
なお、上述の説明では、他車両ov1が左折を予定している場合を例に説明したが、これに限られるものではない。一般的なカーナビゲーションシステムにおいては、経路案内を終了する場合、当該経路案内が終了する地点は目的地周辺である場合が多く、目的地が駐車場のある施設である場合は当該施設の入り口地点を目的地周辺と設定されている場合が多い。そのため、例えば、図5に示すように、他車両ov1の経路案内を示す情報(図5の矢印anv3)が終了する場合、当該他車両ov1は、減速し、矢印atr2方向に左折して目的地に入ると考えられる。つまり、運転支援ECU11は、他車両ov1の経路案内を示す情報が終了することが予定されている場合、上述したようなPCS制御の動作基準を変更してもよい。
【0077】
さらに、上述の説明では、他車両ov1が左折を予定している場合を例に説明したが、例えば、図6に示すような場面についても上述したようなPCS制御の動作基準を変更してもよい。図6は、自車両mvと異なる車線で当該自車両mvの前方を走行している他車両ov3を示した図である。例えば、図6に示すように、自車両mvは、図6の矢印ast1の方向に直進しているものとし、他車両ov3は当該自車両mvと異なる車線(自車両mvに対して左車線)で当該自車両mvの前方を走行しているものと仮に想定する。
【0078】
なお、他車両ov3には、上述したデータ送受信装置21およびナビゲーションシステム22がそれぞれ備わっているものとする。
【0079】
ここで、例えば、他車両ov3に備わったカーナビゲーションシステム22の経路案内が、この先の十字路(交差点)を右折する案内の場合、つまり他車両ov3に備わったカーナビゲーションシステム22が図6の矢印anv4方向に当該他車両ov3を案内することを予定している場合、当該十字路を右折するために車線を変更(図6の矢印atr3方向に進路変更)する可能性が高いと考えられる。すなわち、自車両mvと同じ車線に進入してくることが予想される。
【0080】
運転支援ECU11は、データ送受信装置14によって、他車両ov3の経路案内を示す情報が図6の矢印anv4方向であると認識した場合、例えば、レーダ装置12で検出した物体と自車両mvとが距離Lまで近づいたときに警告等を行うと設定されている場合、当該距離Lよりも短い値に変更してもよい。また、自車両mvと物体とが衝突するまでの時間、つまり衝突予測時間(TTC(Time to collision);TTC=相対距離/相対速度)を算出し、当該算出された結果に基づき、TTCが予め定められた時間Tより短かった場合、車両制御システム15に指示し、上述したようなPCS制御を講じる場合、上記予め定められた時間Tよりも短い値に変更してもよい。
【0081】
さらに、運転支援ECU11は、他車両ov3は次の十字路(交差点)を左折することをドライバーに予め報知してもよい。
【0082】
(第2の実施形態)
次に、第2の実施形態に係る衝突予測装置について図面を参照しつつ説明する。なお、第2の実施形態においても上述した第1の実施形態と同様に、当該衝突予測装置を含むドライバーサポートシステム1が、自車両mvに搭載される場合を想定して説明する。
【0083】
また、以下の第2の実施形態の説明では、上述した第1の実施形態と異なる点についてのみ説明し、同様の動作については、その説明は省略し、同様の構成要素は同じ参照符号を付して、その説明は省略する。
【0084】
なお、以下の説明において、自車両mv以外の車両のことを単に車両と称する。
【0085】
まず、第2の実施形態において、上述した第1の実施形態と異なる点を簡単に説明すると以下の通りである。上述した第1の実施形態においては、車両に備わったカーナビゲーションシステムの経路案内を示す情報を取得し、車両の挙動の変化を予測し、当該予測結果に応じてPCS制御の動作態様を変化させるものであった。第2の実施形態においては、車両に備わったカーナビゲーションシステムの経路案内を示す情報に加えて、自車両mvと車両とが走行している走行路面の周囲の状況を示す情報を取得し、当該周囲の状況を示す情報に応じてPCS制御の動作態様を変化させるものである。
【0086】
図7は、自車両mvの前方に先行車両が存在する場面の一例を示した図である。なお、自車両mvの前方の車両のことを他車両ov4と称する。また、他車両ov4には、上述したデータ送受信装置21およびナビゲーションシステム22が備わっているものとする。
【0087】
図7に示すように、自車両mvは、図7の矢印ast1の方向に直進しているものとし、当該自車両mvの前方には他車両ov4が存在しているものとする。なお、図7に示した走行路面は、他車両ov1の前方がT字路になっており、さらに、そのT字路を左折した先には横断歩道があるものとする。
【0088】
ここで、例えば、他車両ov4に備わったカーナビゲーションシステム22の経路案内が、この先のT字路を左折する場合、つまり他車両ov4に備わったカーナビゲーションシステムが図7の矢印anv5方向に当該他車両ov4を案内することを予定している場合を想定する。また、このとき、図7に示すように歩行者3や自転車4がいるとき、他車両ov4は、図7の矢印atr4の方向に進むことも予想されるが、歩行者3や自転車4がいるので、一旦停止する可能性の方が高いと考えられる。
【0089】
つまり、本実施形態では、自車両mvは、他車両ov4の経路案内を示す情報に加えて、自車両mvと車両とが走行している走行路面の周囲の状況を示す情報に応じてPCS制御の動作態様を変化させるものである。
【0090】
具体的には、図7に示すように、横断歩道を渡ろうとしている歩行者3や自転車4は、センサ5によって検出され、横断歩道を渡ろうとしている歩行者3や自転車4がいることを示す情報を、センサ5が道路側に設置された光ビーコン(beacon)6に送信する。そして、横断歩道を渡ろうとしている歩行者3や自転車4がいることを示す情報を、光ビーコンから自車両mvに搭載されたデータ送受信装置14および/または他車両ov4に搭載されたデータ送受信装置21に送信される。
【0091】
これによって、自車両mvのドライバーは、他車両ov4がT字路で一旦停止する可能性が高いと認識し、自車両mvを減速させ、予め車間距離をとって自車両mvと他車両ov4とが接近しすぎないようにすることができるし、PCS制御についても早いタイミングで行うことができ、より精度の高いPCS制御を行うことが可能となる。
【0092】
以下、図3のフローチャートを再度、参照して、第2の実施形態に係る運転支援ECU11の動作の一例について説明する。
【0093】
上述した第1の実施形態では、図3のステップS14において、運転支援ECU11は、車車間通信を行って、車両から情報を取得することができたか否かを判断した。本実施形態では、ナビゲーションシステム22およびデータ送受信装置21が備わっている他車両ov4から、当該ナビゲーションシステム22によって求められている他車両ov4の現在位置を示す情報および経路案内を示す情報に加えて、光ビーコン6から横断歩道を渡ろうとしている歩行者3や自転車4がいることを示す情報を取得することができたか否かを判断すればよい。
【0094】
そして、本実施形態では、次のステップS15において、運転支援ECU11は、上記ステップS14で取得した現在位置を示す情報および経路案内を示す情報、および光ビーコン6からの情報に基づいて、レーダ装置12で検出した車両は直進するか否か、先の交差点に歩行者等がいるか否かを判断する。つまり、本実施形態におけるステップS15においては、図7に示すように、運転支援ECU11は、他車両ov4が、直進せず、左折して図7の矢印atr4の方向に挙動変化(進路変更)すると予測され、かつ横断歩道を渡ろうとしている歩行者等がいる場合に当該ステップS15での判断を肯定(YES)する。
【0095】
また、道路側に設置された光ビーコン6からの情報は、自車両mvに備わっているデータ送受信装置14によって受信してもよいし、例えば、他車両ov4に備わっているデータ送受信装置21が道路側に設置された光ビーコン6からの情報を取得した場合、自車両mvは、他車両ov4から光ビーコン6からの情報を取得してもよい。
【0096】
さらに、例えば、他車両ov4にレーダ装置が搭載されているとき(図示せず)、当該他車両ov4に搭載されたレーダ装置によって、他車両ov4の前方の物体(具体的には、歩行者等)を検出可能な場合には、当該レーダ装置によって検出した、横断歩道を渡ろうとしている歩行者3や自転車4がいることを示す情報を他車両ov4のデータ送受信装置21から自車両mvに発信してもよい。
【0097】
なお、図3のステップS16以降の処理は、本実施形態においても上述した第1の実施形態と同様の処理が適用可能であるので説明は省略するが、図3のステップS17の処理は、上述した第1の実施形態での処理と異なる処理をするのが好ましい。つまり、上述したように、横断歩道を渡ろうとしている歩行者3や自転車4がいる場合、他車両ov4は、一旦停止する可能性の方が高いと考えられる。より具体的には、T字路に歩行者3や自転車4がいない場合、他車両ov4は、減速しながら当該T字路を左折するが、T字路に歩行者3や自転車4がいる場合、他車両ov4は左折する前に急停止する可能性もある。従って、本実施形態における図3のステップS17の処理は、上述した第1の実施形態で説明した、レーダ装置12で検出した他車両ov4と自車両mvとが距離Lまで近づいたときに警告等を行うと設定されている場合、当該距離Lよりも、さらに短い値に変更することが好ましい。
【0098】
さらに、本実施形態における図3のステップS17の処理は、上述した第1の実施形態で説明した、自車両mvと他車両ov4とが衝突するまでの時間、つまり衝突予測時間(TTC(Time to collision);TTC=相対距離/相対速度)を算出し、当該算出された結果に基づき、TTCが予め定められた時間Tより短かった場合、車両制御システム15に指示し、上述したようなPCS制御を講じる場合、上記予め定められた時間Tよりも、さらに短い値に変更することが好ましい。
【0099】
また、運転支援ECU11は、他車両ov4は次のT字路を左折する前に一旦停止することをドライバーに予め報知してもよい。
【0100】
このようにすれば、他車両ov4は左折する前に急停止する場合でも、より早いタイミングPCS制御を行うことができ、より精度の高いPCS制御を行うことが可能となる。
【0101】
なお、上述した本実施形態の説明では、自車両mvの前方に先行車両が存在する場面で、他車両ov1の前方がT字路になっており、さらに、そのT字路を左折した先には横断歩道がある例を説明したがこれに限られるものではない。
【0102】
例えば、図8のような場面も想定できる。図8は、信号機7や横断歩道が存在する十字路(交差点)の一例を示した図である。図8に示すように、例えば、自車両mvは、図8の矢印ast1の方向に直進しているものとし、他車両ov5は当該自車両mvと同じ進行方向で異なる車線(自車両mvに対して左車線)で当該自車両mvの前方を走行し、また自車両mvに対して右側に対向車線が存在するものと仮に想定する。また、図8に示すように、図8の交差点の信号機7は赤(停止)であり、対向車線の他車両ov6は信号待ちをしているものとする。
【0103】
なお、他車両ov5および他車両ov6には、上述したデータ送受信装置21およびナビゲーションシステム22がそれぞれ備わっているものとする。
【0104】
そして、さらに、他車両ov5に備わったカーナビゲーションシステム22の経路案内が、この先の十字路(交差点)を右折する案内の場合、つまり他車両ov5に備わったカーナビゲーションシステム22が図8の矢印anv6方向に当該他車両ov5を案内することを予定している場合、当該十字路を右折するために他車両ov5は車線を変更(図8の矢印atr5の方向)する可能性が高いと考えられる。
【0105】
また、その一方で、信号機7が赤であるので、他車両ov5は車線変更した後、直ぐに停止することも考えられるし、信号機7が青に変わっても対向車(他車両ov6)が直進を予定している場合、交差点内で他車両ov5は停止することも考えられる。さらに、自車両は、交差点を通過した後も歩行者3や自転車4がいるので、一旦停止する可能性の方が高いとも考えられる。
【0106】
このような場面においても、運転支援ECU11は、他車両ov5のナビゲーションシステム22によって求められている他車両ov5の現在位置を示す情報および経路案内を示す情報に加えて、光ビーコン6から横断歩道を渡ろうとしている歩行者3や自転車4がいることを示す情報、信号機7の情報、および対向車(他車両ov6)の経路案内を示す情報を取得すればよい。そして、上記各種情報に基づいて、上述したようにPCS制御の動作態様を変化させてもよい。
【0107】
なお、上述した第1の実施形態および第2の実施形態では、車両が左側通行である国(例えば日本国内)の走行路面を自車両mvが走行しているものとして説明した。しかしながら、これに限らず、車両が右側通行である国(例えば米国、欧州など)の走行路面を自車両mvが走行している場合も適用できることは言うまでもない。
【0108】
上記実施形態で説明した態様は、単に具体例を示すものであり、本願発明の技術的範囲を何ら限定するものではない。よって、本願の効果を奏する範囲において、任意の構成を採用することが可能である。
【産業上の利用可能性】
【0109】
本発明に係る衝突予測装置は、車両に搭載され他車両の挙動を予測し、より精度の良いPCS制御を行うことのできる衝突予測装置等として利用できる。
【符号の説明】
【0110】
11…運転支援ECU
12…レーダ装置
13、21…データ送受信装置
14…車両制御システム
13、22…カーナビゲーションシステム
3…歩行者
4…自転車
5…センサ
6…光ビーコン
7…信号機
【特許請求の範囲】
【請求項1】
自車両前方の他車両と当該自車両とが衝突するか否かを予測する衝突予測装置であって、
前記自車両前方の他車両を検出する検出手段と、
前記検出手段によって検出された前記他車両と前記自車両とが衝突する危険性が高いと判断した場合に衝突危険回避動作を行う衝突危険回避手段と、
前記他車両に備わったナビゲーションシステムによって得られた前記他車両の位置情報および前記他車両の経路案内情報を車車間通信を介して受信する受信手段と、
前記他車両の位置情報および前記他車両の経路案内情報に基づいて当該他車両の挙動を予測する予測手段と、
前記予測手段によって予測された前記他車両の挙動が予め定められた第1条件を満たす場合に前記衝突危険回避手段が行う前記衝突危険回避動作のタイミングを前記第1条件を満たなかった場合より早くする動作変更手段とを備える、衝突予測装置。
【請求項2】
前記自車両の位置情報を算出する位置情報算出手段をさらに備え、
前記受信手段によって受信することのできた位置情報は前記検出手段が検出した前記他車両に備わったナビゲーションシステムによって得られた位置情報であるか否かを前記自車両の位置情報に基づき判断することを特徴とする、請求項1に記載の衝突予測装置。
【請求項3】
前記第1条件は前記他車両が急減速するか否か、車線変更するか否か、右左折するか否かの前記他車両の挙動の変化の少なくとも何れか1つであり、
前記動作変更手段は前記予測手段によって前記第1条件の少なくとも何れか1つが予測された場合、前記衝突危険回避手段が行う前記衝突危険回避動作を行うタイミングを前記第1条件の少なくとも何れか1つが予測されなかった場合より早くすることを特徴とする、請求項1または2に記載の衝突予測装置。
【請求項4】
前記受信手段は前記他車両から2以上の道路が交わる箇所までの距離および当該道路の右左折角度の少なくとも何れか1つをさらに受信し、
前記動作変更手段は前記距離および前記右左折角度の少なくとも何れか1つが予め定められた第2条件を満たした場合、前記衝突危険回避手段が行う前記衝突危険回避動作のタイミングを前記第2条件の少なくとも何れか1つを満たさなかった場合より早くすることを特徴とする、請求項1または2に記載の衝突予測装置。
【請求項5】
前記第2条件は前記距離が予め定められた距離より短いか否か、前記右左折角度が予め定められた値を超えるか否かの少なくとも何れか1つであることを特徴とする、請求項4に記載の衝突予測装置。
【請求項6】
道路に存在する物体の情報を当該道路に設置された通信設備から受信する情報受信手段をさらに備え、
前記予測手段は、前記他車両の位置情報と前記他車両の経路案内情報と前記物体の情報とに基づいて前記他車両は急減速するか否か、停止するか否か、車線変更するか否か、右左折するか否かの前記他車両の挙動の少なくとも何れか1つを予測し、
前記動作変更手段は前記予測手段によって前記挙動の少なくとも何れか1つが予測された場合、前記衝突危険回避手段が行う前記衝突危険回避動作を行うタイミングを前記挙動の変化の少なくとも何れか1つが予測されなかった場合より早くすることを特徴とする、請求項1または2に記載の衝突予測装置。
【請求項7】
前記衝突危険回避手段が行う前記衝突危険回避動作は前記自車両の運転者に対する警告および前記他車両の挙動に関する情報の報知の少なくと1つを含むことを特徴とする、請求項1または2に記載の衝突予測装置。
【請求項1】
自車両前方の他車両と当該自車両とが衝突するか否かを予測する衝突予測装置であって、
前記自車両前方の他車両を検出する検出手段と、
前記検出手段によって検出された前記他車両と前記自車両とが衝突する危険性が高いと判断した場合に衝突危険回避動作を行う衝突危険回避手段と、
前記他車両に備わったナビゲーションシステムによって得られた前記他車両の位置情報および前記他車両の経路案内情報を車車間通信を介して受信する受信手段と、
前記他車両の位置情報および前記他車両の経路案内情報に基づいて当該他車両の挙動を予測する予測手段と、
前記予測手段によって予測された前記他車両の挙動が予め定められた第1条件を満たす場合に前記衝突危険回避手段が行う前記衝突危険回避動作のタイミングを前記第1条件を満たなかった場合より早くする動作変更手段とを備える、衝突予測装置。
【請求項2】
前記自車両の位置情報を算出する位置情報算出手段をさらに備え、
前記受信手段によって受信することのできた位置情報は前記検出手段が検出した前記他車両に備わったナビゲーションシステムによって得られた位置情報であるか否かを前記自車両の位置情報に基づき判断することを特徴とする、請求項1に記載の衝突予測装置。
【請求項3】
前記第1条件は前記他車両が急減速するか否か、車線変更するか否か、右左折するか否かの前記他車両の挙動の変化の少なくとも何れか1つであり、
前記動作変更手段は前記予測手段によって前記第1条件の少なくとも何れか1つが予測された場合、前記衝突危険回避手段が行う前記衝突危険回避動作を行うタイミングを前記第1条件の少なくとも何れか1つが予測されなかった場合より早くすることを特徴とする、請求項1または2に記載の衝突予測装置。
【請求項4】
前記受信手段は前記他車両から2以上の道路が交わる箇所までの距離および当該道路の右左折角度の少なくとも何れか1つをさらに受信し、
前記動作変更手段は前記距離および前記右左折角度の少なくとも何れか1つが予め定められた第2条件を満たした場合、前記衝突危険回避手段が行う前記衝突危険回避動作のタイミングを前記第2条件の少なくとも何れか1つを満たさなかった場合より早くすることを特徴とする、請求項1または2に記載の衝突予測装置。
【請求項5】
前記第2条件は前記距離が予め定められた距離より短いか否か、前記右左折角度が予め定められた値を超えるか否かの少なくとも何れか1つであることを特徴とする、請求項4に記載の衝突予測装置。
【請求項6】
道路に存在する物体の情報を当該道路に設置された通信設備から受信する情報受信手段をさらに備え、
前記予測手段は、前記他車両の位置情報と前記他車両の経路案内情報と前記物体の情報とに基づいて前記他車両は急減速するか否か、停止するか否か、車線変更するか否か、右左折するか否かの前記他車両の挙動の少なくとも何れか1つを予測し、
前記動作変更手段は前記予測手段によって前記挙動の少なくとも何れか1つが予測された場合、前記衝突危険回避手段が行う前記衝突危険回避動作を行うタイミングを前記挙動の変化の少なくとも何れか1つが予測されなかった場合より早くすることを特徴とする、請求項1または2に記載の衝突予測装置。
【請求項7】
前記衝突危険回避手段が行う前記衝突危険回避動作は前記自車両の運転者に対する警告および前記他車両の挙動に関する情報の報知の少なくと1つを含むことを特徴とする、請求項1または2に記載の衝突予測装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2011−242887(P2011−242887A)
【公開日】平成23年12月1日(2011.12.1)
【国際特許分類】
【出願番号】特願2010−112483(P2010−112483)
【出願日】平成22年5月14日(2010.5.14)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
【公開日】平成23年12月1日(2011.12.1)
【国際特許分類】
【出願日】平成22年5月14日(2010.5.14)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
[ Back to top ]