
衝突回避制御装置及び方法
【課題】衝突回避制御が実行中で自車両が完全に停止する前でも、自車両が対象物に衝突する可能性がなくなった時点で衝突回避制御を終了し、速やかに通常の走行状態に戻すことが可能な衝突回避制御装置を提供する。
【解決手段】衝突回避制御が実行中で、かつ対象物が移動物である場合、自車両と対象物との相対速度が予め定めたゼロ以上の閾値を超えるか否かが判断される。この相対速度が当該閾値未満の間は衝突回避制御が継続して実行され、この相対速度が当該閾値以上になったタイミング、すなわち自車両の走行速度が対象物の走行速度よりも遅くなったタイミングで衝突回避制御が終了する。
【解決手段】衝突回避制御が実行中で、かつ対象物が移動物である場合、自車両と対象物との相対速度が予め定めたゼロ以上の閾値を超えるか否かが判断される。この相対速度が当該閾値未満の間は衝突回避制御が継続して実行され、この相対速度が当該閾値以上になったタイミング、すなわち自車両の走行速度が対象物の走行速度よりも遅くなったタイミングで衝突回避制御が終了する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両に搭載される衝突回避制御装置及び方法に関し、より特定的には、自車両が対象物と衝突する可能性がある場合に自動ブレーキ制御を行って衝突回避を支援する衝突回避制御装置、及びその装置が行う衝突回避制御方法に関する。
【背景技術】
【0002】
車両に搭載される安全装置の1つとして、自車両の周囲に存在する他の車両や歩行者等(以下、対象物と記す)を認識して、走行する自車両が対象物に衝突せずに回避や停止できるようにブレーキの制動力を制御したり、ステアリング操舵角を制御したりして、ドライバの運転操作を支援する衝突回避システムが開発されている。
【0003】
このような衝突回避システムとしては、例えば特許文献1に開示されている従来の技術が存在する。この特許文献1に開示されている従来の技術は、自車両と対象物とが衝突する可能性がある場合に衝突回避制御(ブレーキ制御)を自動的に実行し、自車両と対象物とが衝突する可能性がなくなれば衝突回避制御の実行を終了(解除)する処理を行うものである。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2008−230262号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
上記従来の技術では、自車両と対象物との衝突可能性に基づいて実行される衝突回避制御は、自車両が完全に停止するまで継続して行われ、自車両の完全停止が確認されてから終了する。
【0006】
このような自車両が完全に停止するまで継続される衝突回避制御は、対象物が静止物(電柱、信号機、及びガードレール等の動かない物標)である場合には問題ない。しかし、対象物が移動物(自動車及び二輪車等の動いている物標)である場合には、次のような問題が残る。
【0007】
対象物がある走行速度で移動している移動物である場合、自車両と対象物との衝突可能性に基づいて衝突回避制御が実行されるときに存在していた衝突の危険性は、自車両の走行速度が減速によって対象物の走行速度を下回った時点で解消される。つまり、この時点からは、自車両から見た対象物の相対速度が正値となり、自車両と対象物との相対距離が徐々に大きくなるので、自車両が対象物に衝突する可能性が実質的になくなるのである。従って、自車両の走行速度が対象物の走行速度を下回り、自車両と対象物との衝突可能性がなくなった時点以降はブレーキ動作が不要である。
【0008】
ところが、対象物にかかわらず自車両が完全に停止するまで衝突回避制御を実行する上記従来の技術では、自車両と対象物との衝突可能性がなくなった時点以降も無駄なブレーキ動作を継続することになり、ブレーキパッドの磨耗進行や燃費悪化等の問題を生じ、また自車両の完全停止に伴う後続車両の追突等による二次災害発生の危険も懸念される。
【0009】
それ故に、本発明の目的は、衝突回避制御が実行中で自車両が完全に停止する前でも、自車両が対象物に衝突する可能性がなくなった時点で衝突回避制御を終了し、速やかに通常の走行状態に戻すことが可能な衝突回避制御装置及び方法を提供することである。
【課題を解決するための手段】
【0010】
本発明は、衝突回避制御を行って自車両と対象物との衝突回避を支援する衝突回避制御装置に向けられている。そして、上記目的を達成するために、本発明の衝突回避制御装置は、対象物の速度から自車両の速度を減算して得られる相対速度を監視し、その相対速度が予め定めたゼロ以上の閾値を超えるタイミングを検出する監視手段と、衝突回避制御を実行中に、監視手段においてタイミングが検出されれば、衝突回避制御を終了する制御手段とを備えている。
かかる構成により、衝突回避制御が実行中で自車両が完全に停止する前でも、自車両が対象物に衝突する可能性がなくなった時点で衝突回避制御を終了し、速やかに通常の走行状態に戻すことができる。
【0011】
この監視手段は、ドライバが危険を察知してからドライバによるブレーキ操作に伴った制動力が生じるまでに要する時間、自車両から対象物までの相対距離、及び対象物の減速度のうち、少なくとも1つに基づいて閾値を設定することが好ましい。さらには、監視手段は、少なくともドライバの居眠り又は脇見による前方不注意となる状態に応じて設定された閾値を調整することが好ましい。また、制御手段は、衝突回避制御を実行中に、対象物を検出できなくなれば、衝突回避制御を終了してもよい。
かかる構成により、上記効果に加え自車両と対象物との衝突を確実かつ効果的に回避することができる。
【0012】
また、本発明は、衝突回避制御を行って自車両と対象物との衝突回避を支援する衝突回避制御装置で実行される衝突回避制御方法にも向けられている。上記目的を達成するための衝突回避制御方法は、衝突回避制御装置が実行すべき、対象物の速度から自車両の速度を減算して得られる相対速度を監視するステップ、相対速度が予め定めたゼロ以上の閾値を超えるタイミングを検出するステップ、及び衝突回避制御を実行中に、監視手段においてタイミングが検出されれば、衝突回避制御を終了するステップを含んでいる。閾値は、ドライバが危険を察知してからドライバによるブレーキ操作に伴った制動力が生じるまでに要する時間、自車両から対象物までの相対距離、及び対象物の減速度のうち、少なくとも1つに基づいて設定することが好ましい。
【0013】
この本発明の衝突回避制御方法は、一連の処理手順をコンピュータに実行させるためのプログラムの形式で提供される。このプログラムは、コンピュータ読み取り可能な記録媒体を介してコンピュータの記憶装置に導入されてもよいし、記録媒体上から直接実行されてもよい。この記録媒体は、ROMやRAMやフラッシュメモリ等の半導体メモリ、フレキシブルディスクやハードディスク等の磁気ディスクメモリ、CD−ROMやDVDやBD等の光ディスクメモリ、及びメモリカード等をいい、電話回線や搬送路等の通信媒体も含まれる。
【発明の効果】
【0014】
上記本発明によれば、衝突回避制御が実行中で自車両が完全に停止する前でも、自車両が対象物に衝突する可能性がなくなった時点で衝突回避制御を終了し、速やかに通常の走行状態に戻す。これにより、自車両の対象物との衝突を回避できると共に、衝突回避に関与しない無駄な自動ブレーキ動作を効率的に排除することができ、かつ、ブレーキパッドの磨耗の防止や燃費の向上等に役立たせることができる。
【図面の簡単な説明】
【0015】
【図1】本発明の第1及び第2の実施形態に係る衝突回避制御装置20を備えた衝突回避システムの構成例を示す図
【図2】衝突回避制御装置20が行う衝突回避制御手法を説明するフローチャート
【図3】第1の実施形態における閾値の設定概念を説明するために、自車両及び対象物の走行状態を示す図
【図4】第2の実施形態における閾値の設定概念を説明するために、自車両及び対象物の走行状態を示す図
【図5】第2の実施形態において実行中の衝突回避制御を終了すべきか否かの境界を概念的に示す図
【図6】本発明の第3の実施形態に係る衝突回避制御装置40を備えた衝突回避システムの構成例を示す図
【発明を実施するための形態】
【0016】
以下、本発明の各実施形態について、図面を参照しながら説明する。
<第1の実施形態>
図1は、本発明の第1の実施形態に係る衝突回避制御装置20を備えた衝突回避システムの構成例を示す図である。図1に例示した衝突回避システムは、車速センサ11と、前後加速度センサ12と、前方センサ13と、衝突回避制御装置20と、ブレーキ制御ユニット(BCU:Brake Control Unit)30とで構成されている。衝突回避制御装置20は、衝突判定部21と、制動制御部22と、相対速度監視部23とを備えている。
【0017】
本第1の実施形態に係る衝突回避制御装置20は、衝突回避システムの中枢となる電子制御ユニット(ECU:Electronic Control Unit)であり、CPU(Central Processing Unit)、メモリ、及び入出力インタフェース等で構成されている。この衝突回避制御装置20は、車速センサ11、前後加速度センサ12、及び前方センサ13によって得られた自車両に関する情報及び他の車両や歩行者等の対象物に関する情報に基づいて、自車両と対象物とが衝突する可能性があるか否かを判断する。そして、衝突回避制御装置20は、自車両が対象物に衝突する可能性があると判断した場合に、衝突回避に必要な制御をブレーキ制御ユニット30に対して指示する。
【0018】
まず、車速センサ11、前後加速度センサ12、前方センサ13、衝突回避制御装置20、及びブレーキ制御ユニット30の概要を、以下に説明する。
【0019】
車速センサ11は、自車両の走行速度を検出する。前後加速度センサ12は、自車両の加速度又は減速度を検出する。前方センサ13は、自車両の前方に存在する対象物を検出して、自車両から対象物までの相対距離、及び自車両から対象物を見たときの相対速度等を取得する。この前方センサ13には、例えば、レーザ光やミリ波等の電波を利用したレーダ装置や、画像センサを利用したカメラが用いられる。これらの車速センサ11、前後加速度センサ12、及び前方センサ13によって検出及び取得された自車両の走行速度、自車両の加減速度、自車両と対象物との相対距離、自車両と対象物との相対速度等の情報は、衝突回避制御装置20に出力される。
【0020】
ブレーキ制御ユニット30は、衝突回避制御装置20の制御に従って、自車両の車輪に制動力を与える機構である。典型的には、このブレーキ制御ユニット30は、ブレーキ油圧に応じた力でブレーキバッドを車輪のディスクロータに接触させることによって、所定の制動力を生じさせる。
【0021】
衝突判定部21は、前方センサ13によって自車両の前方に対象物の存在が検出されたると、車速センサ11、前後加速度センサ12、及び前方センサ13によって取得された自車両の走行速度、自車両の加減速度、自車両と対象物との相対距離、及び自車両と対象物との相対速度等の情報を入力する。そして、衝突判定部21は、これらの情報に基づいて、現在の状態を維持したままで走行を続けた場合に自車両が対象物に衝突する可能性があるか否かを判定する。
【0022】
制動制御部22は、衝突判定部21において自車両が対象物に衝突する可能性があると判断された場合、ドライバのブレーキ操作に関係なく、ブレーキ制御ユニット30のブレーキ油圧を制御して自車両の車輪に自動的に制動力を与える制御、すなわち衝突回避制御を実行する。この衝突回避制御によって、自車両が対象物に衝突することを回避することができる。なお、実行中の衝突回避制御は、自車両が完全に停止するか、相対速度監視部23から特定の指示が与えられると、終了する。
【0023】
相対速度監視部23は、前方センサ13によって取得された自車両と対象物との相対速度を監視している。そして、相対速度監視部23は、制動制御部22によって衝突回避制御が開始された後に、相対速度が予め定めた閾値を超えると、制動制御部22に対して衝突回避制御を終了するように指示する。この相対速度監視部23の処理は、以下に詳述する。
【0024】
次に、上記構成による第1の実施形態に係る衝突回避制御装置20が行う衝突回避制御の手法を、図2及び図3をさらに参照して説明する。
図2は、本発明の第1の実施形態に係る衝突回避制御装置20が行う衝突回避制御手法を説明するフローチャートである。図3は、第1の実施形態における閾値の設定概念を説明するために、自車両及び対象物の走行状態を示す図である。
【0025】
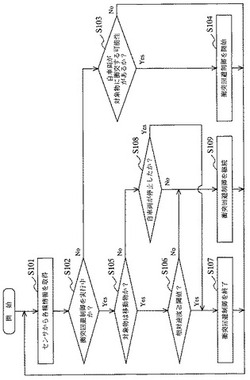
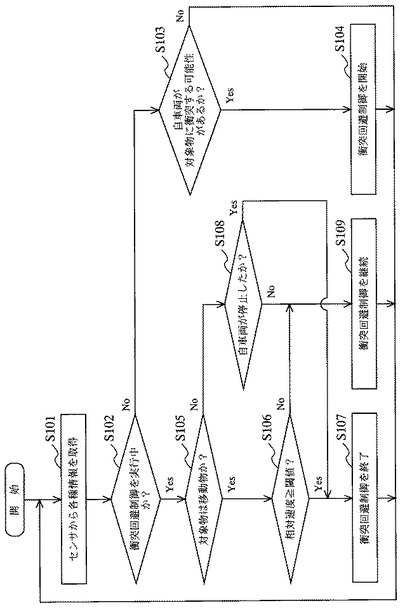
図2に示す処理は、前方センサ13によって自車両の前方に対象物の存在が検出されたると開始される。対象物が検出されると、衝突判定部21は、車速センサ11、前後加速度センサ12、及び前方センサ13から、自車両の走行速度、自車両の加減速度、自車両と対象物との相対距離、及び自車両と対象物との相対速度等の各種情報を取得する(ステップS101)。次に、衝突判定部21によって、衝突回避制御が実行中であるか否かが判断される(ステップS102)。処理開始直後のこの時点では衝突回避制御がまだ実行されていない(ステップS102、No)。よって、衝突判定部21は、取得した各種情報から自車両が対象物に衝突する可能性があるか否かを判断する(ステップS103)。
【0026】
制動制御部22は、衝突判定部21において、自車両が相手車両に衝突する可能性があると判断された場合(ステップS103、Yes)には衝突回避制御を開始し(ステップS104)、自車両が相手車両に衝突する可能性がないと判断された場合には(ステップS103、No)衝突回避制御を開始することなく、上記ステップS101に戻って衝突判定部21における次の判定を待つ。
【0027】
そして、上記ステップS103又はS104の処理が終了すると、衝突判定部21は、車速センサ11、前後加速度センサ12、及び前方センサ13から、現在での自車両の走行速度、自車両の加減速度、自車両と対象物との相対距離、及び自車両と対象物との相対速度等の各種情報を再び取得する(ステップS101)。
【0028】
衝突判定部21によって各種情報が再び取得されると(ステップS101)、衝突判定部21によって、衝突回避制御が実行中であるか否かが再度判断される(ステップS102)。このとき、上記ステップS104において衝突回避制御を開始している場合はステップS105に進み、衝突回避制御を開始していない場合はステップS103に進んで上述した処理を繰り返し行う(ステップS101〜S104)。
【0029】
衝突回避制御が実行中である場合、衝突判定部21は、検出された対象物が移動物であるか静止物であるかを判断する(ステップS105)。移動物とは、自動車、二輪車、及び歩行者等の動いている物標をいう。静止物とは、電柱、信号機、及びガードレール等の動かない物標をいう。従って、この静止物には、動いていない駐車中の車両も含まれる。なお、静止物は完全に停止している物標だけに限らず、例えば時速10km以下で動いている物標(歩行者や自転車)を静止物に含めてもよい。
【0030】
対象物が移動物である場合、相対速度監視部23は、監視している自車両と対象物との相対速度が予め定めた閾値を超えるか否かを判断する(ステップS106)。一方、対象物が静止物である場合、制動制御部22は、自車両が完全に停止したか否かを判断する(ステップS108)。
【0031】
ここで、自車両と対象物との衝突が回避される条件について説明する。
まず、対象物が静止物である場合、衝突回避制御の実行によって自車両に減速度が生じても、自車両と対象物との距離が増えることはない。従って、対象物が静止物である場合には、衝突判定部21が衝突の可能性を判断した時点で求められた回避条件(制御開始のタイミング、車両の減速度等)が維持されるので、自車両が完全に停止するまで衝突回避制御が継続して実行され(ステップS109)、自車両が完全に停止した後に衝突回避制御が終了する(ステップS107)といった処理が行われる。
【0032】
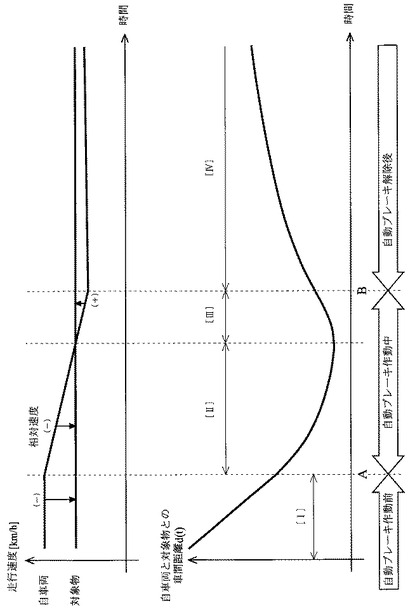
これに対し、対象物が移動物である場合、衝突回避制御の実行によって自車両に減速度が生じると、自車両と対象物との走行速度関係により、自車両と対象物との相対速度が減少から増加に転じて自車両と対象物との距離が増える現象が起こる。図3は、この現象を説明する図である。図3では、自車両が時速60kmの速度で、また対象物が時速40kmの速度で走行中に、自車両が対象物に近付き過ぎて衝突回避制御、すなわち自動ブレーキが作動した場合を例に説明している。
【0033】
自車両が時速60kmの速度で走行し、対象物が時速40kmの速度で走行している期間[I]では、相対速度はマイナス(−)であるため、自車両と対象物との車間距離が急速に縮まってきている。衝突判定部21が衝突の可能性を判断したタイミングAで衝突回避制御が開始され自動ブレーキが作動すると、自車両の走行速度が対象物の走行速度と同じになるまでの期間[II]は、相対速度はマイナス(−)であるものの自車両と対象物との車間距離の縮まり方が小さくなる。その後、自車両の走行速度が対象物の走行速度よりも低い時速40km未満になると、自車両から見た対象物の相対速度がマイナス(−)からプラス(+)に転じて、期間[III]では自車両と対象物との車間距離が増え始める。従って、対象物が時速40kmの速度で走行を維持しているのであれば(期間[IV])、自車両の走行速度が時速40km未満になったタイミングで衝突回避制御を終了、すなわち自動ブレーキを解除しても、衝突を回避できると言える。図3の例では、タイミングBとして自車両の走行速度が時速30kmになったタイミングを示している。
【0034】
よって、対象物が移動物である場合には、自車両の走行速度が対象物の走行速度よりも速い間、すなわち自車両から見た対象物の相対速度がゼロ未満の間は衝突回避制御が継続して実行され(ステップS109)、自車両の走行速度が対象物の走行速度よりも遅くなったタイミング、すなわち自車両から見た対象物の相対速度がゼロ以上になったタイミングBで、衝突回避制御を終了する(ステップS107)処理が行われる。従って、相対速度がゼロ以上が回避条件となり、上記ステップS106では、相対速度監視部23は、予め定めたゼロ以上の閾値を用いて、自車両と対象物との相対速度がこの閾値を超えるか否かを判断することを行う。
【0035】
上述した図2に示すステップS101〜S109の処理は、対象物が検出されなくなるまで繰り返し行われる。
【0036】
以上のように、本発明の第1の実施形態に係る衝突回避制御装置20によれば、対象物が移動物である場合には、衝突回避制御が実行中で自車両が完全に停止する前でも、自車両が対象物に衝突する可能性がなくなった時点で衝突回避制御を終了し、速やかに通常の走行状態に戻す処理を行う。この処理により、自車両の対象物との衝突を回避できると共に、衝突回避に関与しない無駄な自動ブレーキ動作を効率的に排除することができ、かつ、ブレーキパッドの磨耗の防止や燃費の向上等に役立たせることができる。また、この処理により、自車両の対象物との衝突を回避できると共に、自車両の完全停止に伴う後続車両の追突等による二次災害発生の危険も同時に回避することができる。
【0037】
なお、上記実施形態では、衝突判定部21が実行中の衝突回避制御を終了するための条件として、自車両と対象物との相対速度が予め定めた閾値を超える場合(図2のステップS106)だけを説明したが、条件はこれに限るものではない。
例えば、予め自車両の前方を、衝突可能性は高いが自車両又は対象物の挙動(操舵等)によっては衝突を回避できる可能性がある領域Xと、衝突可能性が高く自車両又は対象物の挙動があっても衝突を回避できる可能性が殆どない領域Yとに区分しておく。そして、衝突判定部21は、自車両と対象物との相対距離が領域Yに含まれる場面では、上記実施形態の通り自車両と対象物との相対速度が予め定めた閾値を超える場合だけを判断し、自車両と対象物との相対距離が領域Xに含まれる場面では、この場合に加えて、対象物が前方センサ13で検出されなくなった場合や前方センサ13で検出されているが対象物が自車両の進行方向に対して横方向に外れていった場合も判断することが考えられる。
【0038】
<第2の実施形態>
上記第1の実施形態では、対象物が移動物である場合には自車両が対象物に衝突する可能性がなくなった時点、すなわち自車両から見た対象物の相対速度がゼロ以上になったタイミングで衝突回避制御を終了する手法を説明した。
【0039】
しかし、この手法の成立は、衝突回避制御を終了した後で自車両の走行速度が上昇しない又は対象物の走行速度が低下しないことが前提である。衝突回避制御を終了した後で自車両の走行速度が上昇しない又は対象物の走行速度が低下する場合には、上記ステップS106で相対速度監視部23が判断に用いることができる閾値の設定を十分に考慮する必要がある。
【0040】
そこで、この第2の実施形態では、衝突回避制御を終了した後で自車両の走行速度が上昇しない又は対象物の走行速度が低下する場合に、有用な閾値の設定手法を説明する。なお、第2の実施形態に係る衝突回避制御装置の構成は、上記第1の実施形態に係る衝突回避制御装置20の構成と同様であるので、その説明は省略する。
【0041】
以下、本第2の実施形態が第1の実施形態と異なる閾値の設定手法を、図4及び図5をさらに参照して説明する。図4は、第2の実施形態における閾値の設定概念を説明するために、自車両及び対象物の走行状態を示す図である。図5は、実行中の衝突回避制御を終了すべきか否かの境界を概念的に示す図である。
【0042】
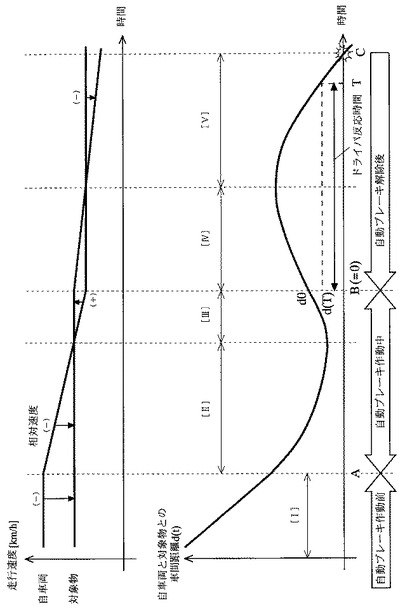
図4では、期間[I]〜[III]における自車両及び対象物の走行速度変化は上記図3と同様であり、期間[IV]以降における対象物の走行速度変化が異なる例である。図4の例では、タイミングBにおいて衝突回避制御を終了した後に対象物の走行速度が自車両の走行速度未満まで低下する場合を示している。この場合、タイミングBでは自車両から見た対象物の相対速度がプラス(+)であるが、対象物の走行速度が低下しているため自車両と対象物との車間距離の拡大幅が徐々に小さくなっている(期間[IV])。そして、対象物の走行速度が自車両の走行速度を下回る、すなわち自車両から見た対象物の相対速度がマイナス(−)となる時点から自車両と対象物との車間距離が減少に転じる。この場合、ドライバが自主的にブレーキ操作を行わないと、最終的には、タイミングCにおいて自車両と対象物とが衝突することになる。また、ドライバが自主的にブレーキ操作を行ったとしても、自車両と対象物との車間距離や自車両及び対象物の走行速度や減速度の状態によっては、衝突を回避できない場合も考えられる。そこで、第2の実施形態では、衝突回避制御を終了するタイミングBを与える閾値の効果的に設定することを行う。
【0043】
衝突回避制御を終了したタイミングBにおける、自車両と対象物との車間距離d0、自車両から見た対象物の相対速度vr0、及び対象物の減速度a0と、ドライバ反応時間Tとから、閾値VRを以下のようにして求める。なお、自車両は、一定速度で走行を続けるものと仮定する(加減速度は「0」)。また、ドライバ反応時間Tとは、ドライバが危険を察知してから、危険を回避しようとしてドライバが行ったブレーキ操作に伴った制動力が生じるまで、に要する時間をいう。
【0044】
衝突回避制御を終了したタイミングB以降の任意の時間tにおける自車両と対象物との車間距離d(t)は、次式[1]で表される。なお、対象物が減速している場合における説明であるので、a0>0である。
d(t)=−1/2×a0×t2+vr0×t+d0 … [1]
【0045】
よって、ドライバがブレーキ操作を行って制動力が生じるドライバ反応時間Tが経過した後の自車両と対象物との車間距離d(T)は、次式[2]となる。
d(T)=−1/2×a0×T2+vr0×T+d0 … [2]
【0046】
図4及びこの式[2]を考慮すると、d(T)≧0の条件を満足すれば、自車両と対象物とが衝突する(タイミングC)前にドライバがブレーキ操作を行うことができると推測できる。よって、このd(T)≧0の条件で上記式[2]を変形すると、下記式[3]が得られる。
vr0≧1/2×a0×T−d0/T … [3]
【0047】
この式[3]を図示すると図5のようになる。図5の網掛けの領域は、式[3]が不成立となり、タイミングBで実行中の衝突回避制御を終了すれば自車両と対象物とが衝突する危険性があると判断される領域であり、その他の白色領域は、式[3]が成立して、タイミングBで実行中の衝突回避制御を終了しても自車両と対象物とが衝突する危険性はないと判断される領域である。
【0048】
これらの結果から、相対速度vr0と比較する閾値VRを下記式[4]に基づいて設定することにより、自車両と対象物との車間距離d0、対象物の減速度a0、及びドライバ反応時間Tを考慮した、最適な衝突回避制御の終了処理を実現できる。
VR≧1/2×a0×T−d0/T … [4]
【0049】
以上のように、本発明の第2の実施形態に係る衝突回避制御装置20によれば、自車両と対象物との車間距離、対象物の減速度、及びドライバ反応時間を考慮して相対速度と比較する閾値を設定する。これにより、上記第1の実施形態よりも、自車両と対象物との衝突を確実かつ効果的に回避することができる。
【0050】
<第3の実施形態>
上記第2の実施形態では、ドライバ反応時間Tを考慮した最適な衝突回避制御の終了処理を説明した。しかし、ドライバの居眠りや脇見等による前方不注意が生じていると、ドライバが危険を察知するタイミングが遅れるため、ドライバ反応時間Tが大きく変化するものと考えられる。
そこで、この第3の実施形態では、ドライバの運転状態を観察し、ドライバの居眠りや脇見等による前方不注意の発生に応じて、ドライバ反応時間Tを動的に変更する手法を説明する。
【0051】
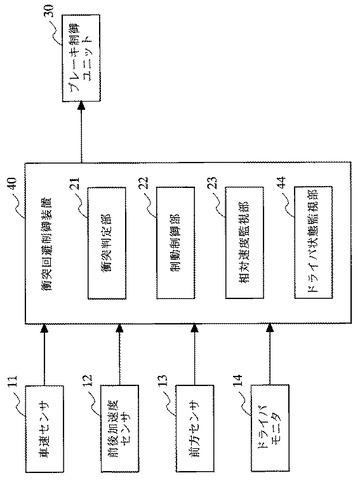
図6は、本発明の第3の実施形態に係る衝突回避制御装置40を備えた衝突回避システムの構成例を示す図である。図6に例示した衝突回避システムは、車速センサ11と、前後加速度センサ12と、前方センサ13と、ドライバモニタ14と、衝突回避制御装置40と、ブレーキ制御ユニット30とで構成されている。衝突回避制御装置40は、衝突判定部21と、制動制御部22と、相対速度監視部23と、ドライバ状態監視部44とを備えている。
【0052】
本第3の実施形態に係る衝突回避システムは、上記第1の実施形態に係る衝突回避制御装置40を備えた衝突回避システムと比べて、ドライバモニタ14と、衝突回避制御装置40が備えるドライバ状態監視部44との構成が異なる。以下、この異なる構成を中心に第3の実施形態に係る衝突回避システムを説明し、上記第1の実施形態と同一の機能を有する構成については、同一の参照符号を付してその説明を省略する。
【0053】
ドライバモニタ14は、ステアリングコラムカバー上に設けられるドライバの顔を撮像するモニタカメラ等を構成に含み、ドライバの顔向きや眼の開閉状態等を検出する。このドライバモニタ14で検出された情報は、衝突回避制御装置40に出力される。
【0054】
衝突回避制御装置40のドライバ状態監視部44は、ドライバモニタ14で検出された情報を入力し、この情報を分析してドライバが居眠りをしているか否かやドライバが脇見をしているか否か等に基づいて、前方不注意が生じているか否かを判断する。例えば、ドライバの居眠りは、通常の瞬きよりも長く眼が閉じている場合や顔の角度が水平方向よりも下がっている場合等で判断可能である。また、ドライバによる脇見は、ドライバの顔(又は眼球)が正面を向いていない時間が長い場合等で判断可能である。
【0055】
そして、ドライバ状態監視部44は、ドライバの居眠りや脇見等による前方不注意が生じていることを確認すると、相対速度監視部23に対して、ドライバ反応時間Tを通常よりも大きい値(T+α)に変更するように指示する。なお、変更後の値(T+α)は、生じている前方不注意の度合いに応じて適宜設定すればよい。この前方不注意の度合いは、典型的には、瞬き時間、顔の角度、及び視線の移動量等から複合的に判断して決定される。
【0056】
これらの結果から、前方不注意が生じる場合には下記式[5]に基づいて閾値VRを設定することにより、自車両と対象物との車間距離d0、対象物の減速度a0、及びドライバ反応時間Tを考慮した、最適な衝突回避制御の終了処理を実現できる。
VR≧1/2×a0×(T+α)−d0/(T+α) … [5]
【0057】
以上のように、本発明の第3の実施形態に係る衝突回避制御装置40によれば、ドライバの前方不注意を考慮して相対速度と比較する閾値を設定する。これにより、上記第1及び第2の実施形態よりも、自車両と対象物との衝突を確実かつ効果的に回避することができる。
【産業上の利用可能性】
【0058】
本発明の衝突回避制御装置は、自車両と対象物との衝突を回避する衝突回避システム等に利用可能であり、特に自車両が対象物に衝突する可能性がなくなった時点で実行中の衝突回避制御を終了して速やかに通常の走行状態に戻したい場合等に有用である。
【符号の説明】
【0059】
11 車速センサ
12 前後加速度センサ
13 前方センサ
14 ドライバモニタ
20、40 衝突回避制御装置
21 衝突判定部
22 制動制御部
23 相対速度監視部
30 ブレーキ制御ユニット
44 ドライバ状態監視部
【技術分野】
【0001】
本発明は、車両に搭載される衝突回避制御装置及び方法に関し、より特定的には、自車両が対象物と衝突する可能性がある場合に自動ブレーキ制御を行って衝突回避を支援する衝突回避制御装置、及びその装置が行う衝突回避制御方法に関する。
【背景技術】
【0002】
車両に搭載される安全装置の1つとして、自車両の周囲に存在する他の車両や歩行者等(以下、対象物と記す)を認識して、走行する自車両が対象物に衝突せずに回避や停止できるようにブレーキの制動力を制御したり、ステアリング操舵角を制御したりして、ドライバの運転操作を支援する衝突回避システムが開発されている。
【0003】
このような衝突回避システムとしては、例えば特許文献1に開示されている従来の技術が存在する。この特許文献1に開示されている従来の技術は、自車両と対象物とが衝突する可能性がある場合に衝突回避制御(ブレーキ制御)を自動的に実行し、自車両と対象物とが衝突する可能性がなくなれば衝突回避制御の実行を終了(解除)する処理を行うものである。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2008−230262号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
上記従来の技術では、自車両と対象物との衝突可能性に基づいて実行される衝突回避制御は、自車両が完全に停止するまで継続して行われ、自車両の完全停止が確認されてから終了する。
【0006】
このような自車両が完全に停止するまで継続される衝突回避制御は、対象物が静止物(電柱、信号機、及びガードレール等の動かない物標)である場合には問題ない。しかし、対象物が移動物(自動車及び二輪車等の動いている物標)である場合には、次のような問題が残る。
【0007】
対象物がある走行速度で移動している移動物である場合、自車両と対象物との衝突可能性に基づいて衝突回避制御が実行されるときに存在していた衝突の危険性は、自車両の走行速度が減速によって対象物の走行速度を下回った時点で解消される。つまり、この時点からは、自車両から見た対象物の相対速度が正値となり、自車両と対象物との相対距離が徐々に大きくなるので、自車両が対象物に衝突する可能性が実質的になくなるのである。従って、自車両の走行速度が対象物の走行速度を下回り、自車両と対象物との衝突可能性がなくなった時点以降はブレーキ動作が不要である。
【0008】
ところが、対象物にかかわらず自車両が完全に停止するまで衝突回避制御を実行する上記従来の技術では、自車両と対象物との衝突可能性がなくなった時点以降も無駄なブレーキ動作を継続することになり、ブレーキパッドの磨耗進行や燃費悪化等の問題を生じ、また自車両の完全停止に伴う後続車両の追突等による二次災害発生の危険も懸念される。
【0009】
それ故に、本発明の目的は、衝突回避制御が実行中で自車両が完全に停止する前でも、自車両が対象物に衝突する可能性がなくなった時点で衝突回避制御を終了し、速やかに通常の走行状態に戻すことが可能な衝突回避制御装置及び方法を提供することである。
【課題を解決するための手段】
【0010】
本発明は、衝突回避制御を行って自車両と対象物との衝突回避を支援する衝突回避制御装置に向けられている。そして、上記目的を達成するために、本発明の衝突回避制御装置は、対象物の速度から自車両の速度を減算して得られる相対速度を監視し、その相対速度が予め定めたゼロ以上の閾値を超えるタイミングを検出する監視手段と、衝突回避制御を実行中に、監視手段においてタイミングが検出されれば、衝突回避制御を終了する制御手段とを備えている。
かかる構成により、衝突回避制御が実行中で自車両が完全に停止する前でも、自車両が対象物に衝突する可能性がなくなった時点で衝突回避制御を終了し、速やかに通常の走行状態に戻すことができる。
【0011】
この監視手段は、ドライバが危険を察知してからドライバによるブレーキ操作に伴った制動力が生じるまでに要する時間、自車両から対象物までの相対距離、及び対象物の減速度のうち、少なくとも1つに基づいて閾値を設定することが好ましい。さらには、監視手段は、少なくともドライバの居眠り又は脇見による前方不注意となる状態に応じて設定された閾値を調整することが好ましい。また、制御手段は、衝突回避制御を実行中に、対象物を検出できなくなれば、衝突回避制御を終了してもよい。
かかる構成により、上記効果に加え自車両と対象物との衝突を確実かつ効果的に回避することができる。
【0012】
また、本発明は、衝突回避制御を行って自車両と対象物との衝突回避を支援する衝突回避制御装置で実行される衝突回避制御方法にも向けられている。上記目的を達成するための衝突回避制御方法は、衝突回避制御装置が実行すべき、対象物の速度から自車両の速度を減算して得られる相対速度を監視するステップ、相対速度が予め定めたゼロ以上の閾値を超えるタイミングを検出するステップ、及び衝突回避制御を実行中に、監視手段においてタイミングが検出されれば、衝突回避制御を終了するステップを含んでいる。閾値は、ドライバが危険を察知してからドライバによるブレーキ操作に伴った制動力が生じるまでに要する時間、自車両から対象物までの相対距離、及び対象物の減速度のうち、少なくとも1つに基づいて設定することが好ましい。
【0013】
この本発明の衝突回避制御方法は、一連の処理手順をコンピュータに実行させるためのプログラムの形式で提供される。このプログラムは、コンピュータ読み取り可能な記録媒体を介してコンピュータの記憶装置に導入されてもよいし、記録媒体上から直接実行されてもよい。この記録媒体は、ROMやRAMやフラッシュメモリ等の半導体メモリ、フレキシブルディスクやハードディスク等の磁気ディスクメモリ、CD−ROMやDVDやBD等の光ディスクメモリ、及びメモリカード等をいい、電話回線や搬送路等の通信媒体も含まれる。
【発明の効果】
【0014】
上記本発明によれば、衝突回避制御が実行中で自車両が完全に停止する前でも、自車両が対象物に衝突する可能性がなくなった時点で衝突回避制御を終了し、速やかに通常の走行状態に戻す。これにより、自車両の対象物との衝突を回避できると共に、衝突回避に関与しない無駄な自動ブレーキ動作を効率的に排除することができ、かつ、ブレーキパッドの磨耗の防止や燃費の向上等に役立たせることができる。
【図面の簡単な説明】
【0015】
【図1】本発明の第1及び第2の実施形態に係る衝突回避制御装置20を備えた衝突回避システムの構成例を示す図
【図2】衝突回避制御装置20が行う衝突回避制御手法を説明するフローチャート
【図3】第1の実施形態における閾値の設定概念を説明するために、自車両及び対象物の走行状態を示す図
【図4】第2の実施形態における閾値の設定概念を説明するために、自車両及び対象物の走行状態を示す図
【図5】第2の実施形態において実行中の衝突回避制御を終了すべきか否かの境界を概念的に示す図
【図6】本発明の第3の実施形態に係る衝突回避制御装置40を備えた衝突回避システムの構成例を示す図
【発明を実施するための形態】
【0016】
以下、本発明の各実施形態について、図面を参照しながら説明する。
<第1の実施形態>
図1は、本発明の第1の実施形態に係る衝突回避制御装置20を備えた衝突回避システムの構成例を示す図である。図1に例示した衝突回避システムは、車速センサ11と、前後加速度センサ12と、前方センサ13と、衝突回避制御装置20と、ブレーキ制御ユニット(BCU:Brake Control Unit)30とで構成されている。衝突回避制御装置20は、衝突判定部21と、制動制御部22と、相対速度監視部23とを備えている。
【0017】
本第1の実施形態に係る衝突回避制御装置20は、衝突回避システムの中枢となる電子制御ユニット(ECU:Electronic Control Unit)であり、CPU(Central Processing Unit)、メモリ、及び入出力インタフェース等で構成されている。この衝突回避制御装置20は、車速センサ11、前後加速度センサ12、及び前方センサ13によって得られた自車両に関する情報及び他の車両や歩行者等の対象物に関する情報に基づいて、自車両と対象物とが衝突する可能性があるか否かを判断する。そして、衝突回避制御装置20は、自車両が対象物に衝突する可能性があると判断した場合に、衝突回避に必要な制御をブレーキ制御ユニット30に対して指示する。
【0018】
まず、車速センサ11、前後加速度センサ12、前方センサ13、衝突回避制御装置20、及びブレーキ制御ユニット30の概要を、以下に説明する。
【0019】
車速センサ11は、自車両の走行速度を検出する。前後加速度センサ12は、自車両の加速度又は減速度を検出する。前方センサ13は、自車両の前方に存在する対象物を検出して、自車両から対象物までの相対距離、及び自車両から対象物を見たときの相対速度等を取得する。この前方センサ13には、例えば、レーザ光やミリ波等の電波を利用したレーダ装置や、画像センサを利用したカメラが用いられる。これらの車速センサ11、前後加速度センサ12、及び前方センサ13によって検出及び取得された自車両の走行速度、自車両の加減速度、自車両と対象物との相対距離、自車両と対象物との相対速度等の情報は、衝突回避制御装置20に出力される。
【0020】
ブレーキ制御ユニット30は、衝突回避制御装置20の制御に従って、自車両の車輪に制動力を与える機構である。典型的には、このブレーキ制御ユニット30は、ブレーキ油圧に応じた力でブレーキバッドを車輪のディスクロータに接触させることによって、所定の制動力を生じさせる。
【0021】
衝突判定部21は、前方センサ13によって自車両の前方に対象物の存在が検出されたると、車速センサ11、前後加速度センサ12、及び前方センサ13によって取得された自車両の走行速度、自車両の加減速度、自車両と対象物との相対距離、及び自車両と対象物との相対速度等の情報を入力する。そして、衝突判定部21は、これらの情報に基づいて、現在の状態を維持したままで走行を続けた場合に自車両が対象物に衝突する可能性があるか否かを判定する。
【0022】
制動制御部22は、衝突判定部21において自車両が対象物に衝突する可能性があると判断された場合、ドライバのブレーキ操作に関係なく、ブレーキ制御ユニット30のブレーキ油圧を制御して自車両の車輪に自動的に制動力を与える制御、すなわち衝突回避制御を実行する。この衝突回避制御によって、自車両が対象物に衝突することを回避することができる。なお、実行中の衝突回避制御は、自車両が完全に停止するか、相対速度監視部23から特定の指示が与えられると、終了する。
【0023】
相対速度監視部23は、前方センサ13によって取得された自車両と対象物との相対速度を監視している。そして、相対速度監視部23は、制動制御部22によって衝突回避制御が開始された後に、相対速度が予め定めた閾値を超えると、制動制御部22に対して衝突回避制御を終了するように指示する。この相対速度監視部23の処理は、以下に詳述する。
【0024】
次に、上記構成による第1の実施形態に係る衝突回避制御装置20が行う衝突回避制御の手法を、図2及び図3をさらに参照して説明する。
図2は、本発明の第1の実施形態に係る衝突回避制御装置20が行う衝突回避制御手法を説明するフローチャートである。図3は、第1の実施形態における閾値の設定概念を説明するために、自車両及び対象物の走行状態を示す図である。
【0025】
図2に示す処理は、前方センサ13によって自車両の前方に対象物の存在が検出されたると開始される。対象物が検出されると、衝突判定部21は、車速センサ11、前後加速度センサ12、及び前方センサ13から、自車両の走行速度、自車両の加減速度、自車両と対象物との相対距離、及び自車両と対象物との相対速度等の各種情報を取得する(ステップS101)。次に、衝突判定部21によって、衝突回避制御が実行中であるか否かが判断される(ステップS102)。処理開始直後のこの時点では衝突回避制御がまだ実行されていない(ステップS102、No)。よって、衝突判定部21は、取得した各種情報から自車両が対象物に衝突する可能性があるか否かを判断する(ステップS103)。
【0026】
制動制御部22は、衝突判定部21において、自車両が相手車両に衝突する可能性があると判断された場合(ステップS103、Yes)には衝突回避制御を開始し(ステップS104)、自車両が相手車両に衝突する可能性がないと判断された場合には(ステップS103、No)衝突回避制御を開始することなく、上記ステップS101に戻って衝突判定部21における次の判定を待つ。
【0027】
そして、上記ステップS103又はS104の処理が終了すると、衝突判定部21は、車速センサ11、前後加速度センサ12、及び前方センサ13から、現在での自車両の走行速度、自車両の加減速度、自車両と対象物との相対距離、及び自車両と対象物との相対速度等の各種情報を再び取得する(ステップS101)。
【0028】
衝突判定部21によって各種情報が再び取得されると(ステップS101)、衝突判定部21によって、衝突回避制御が実行中であるか否かが再度判断される(ステップS102)。このとき、上記ステップS104において衝突回避制御を開始している場合はステップS105に進み、衝突回避制御を開始していない場合はステップS103に進んで上述した処理を繰り返し行う(ステップS101〜S104)。
【0029】
衝突回避制御が実行中である場合、衝突判定部21は、検出された対象物が移動物であるか静止物であるかを判断する(ステップS105)。移動物とは、自動車、二輪車、及び歩行者等の動いている物標をいう。静止物とは、電柱、信号機、及びガードレール等の動かない物標をいう。従って、この静止物には、動いていない駐車中の車両も含まれる。なお、静止物は完全に停止している物標だけに限らず、例えば時速10km以下で動いている物標(歩行者や自転車)を静止物に含めてもよい。
【0030】
対象物が移動物である場合、相対速度監視部23は、監視している自車両と対象物との相対速度が予め定めた閾値を超えるか否かを判断する(ステップS106)。一方、対象物が静止物である場合、制動制御部22は、自車両が完全に停止したか否かを判断する(ステップS108)。
【0031】
ここで、自車両と対象物との衝突が回避される条件について説明する。
まず、対象物が静止物である場合、衝突回避制御の実行によって自車両に減速度が生じても、自車両と対象物との距離が増えることはない。従って、対象物が静止物である場合には、衝突判定部21が衝突の可能性を判断した時点で求められた回避条件(制御開始のタイミング、車両の減速度等)が維持されるので、自車両が完全に停止するまで衝突回避制御が継続して実行され(ステップS109)、自車両が完全に停止した後に衝突回避制御が終了する(ステップS107)といった処理が行われる。
【0032】
これに対し、対象物が移動物である場合、衝突回避制御の実行によって自車両に減速度が生じると、自車両と対象物との走行速度関係により、自車両と対象物との相対速度が減少から増加に転じて自車両と対象物との距離が増える現象が起こる。図3は、この現象を説明する図である。図3では、自車両が時速60kmの速度で、また対象物が時速40kmの速度で走行中に、自車両が対象物に近付き過ぎて衝突回避制御、すなわち自動ブレーキが作動した場合を例に説明している。
【0033】
自車両が時速60kmの速度で走行し、対象物が時速40kmの速度で走行している期間[I]では、相対速度はマイナス(−)であるため、自車両と対象物との車間距離が急速に縮まってきている。衝突判定部21が衝突の可能性を判断したタイミングAで衝突回避制御が開始され自動ブレーキが作動すると、自車両の走行速度が対象物の走行速度と同じになるまでの期間[II]は、相対速度はマイナス(−)であるものの自車両と対象物との車間距離の縮まり方が小さくなる。その後、自車両の走行速度が対象物の走行速度よりも低い時速40km未満になると、自車両から見た対象物の相対速度がマイナス(−)からプラス(+)に転じて、期間[III]では自車両と対象物との車間距離が増え始める。従って、対象物が時速40kmの速度で走行を維持しているのであれば(期間[IV])、自車両の走行速度が時速40km未満になったタイミングで衝突回避制御を終了、すなわち自動ブレーキを解除しても、衝突を回避できると言える。図3の例では、タイミングBとして自車両の走行速度が時速30kmになったタイミングを示している。
【0034】
よって、対象物が移動物である場合には、自車両の走行速度が対象物の走行速度よりも速い間、すなわち自車両から見た対象物の相対速度がゼロ未満の間は衝突回避制御が継続して実行され(ステップS109)、自車両の走行速度が対象物の走行速度よりも遅くなったタイミング、すなわち自車両から見た対象物の相対速度がゼロ以上になったタイミングBで、衝突回避制御を終了する(ステップS107)処理が行われる。従って、相対速度がゼロ以上が回避条件となり、上記ステップS106では、相対速度監視部23は、予め定めたゼロ以上の閾値を用いて、自車両と対象物との相対速度がこの閾値を超えるか否かを判断することを行う。
【0035】
上述した図2に示すステップS101〜S109の処理は、対象物が検出されなくなるまで繰り返し行われる。
【0036】
以上のように、本発明の第1の実施形態に係る衝突回避制御装置20によれば、対象物が移動物である場合には、衝突回避制御が実行中で自車両が完全に停止する前でも、自車両が対象物に衝突する可能性がなくなった時点で衝突回避制御を終了し、速やかに通常の走行状態に戻す処理を行う。この処理により、自車両の対象物との衝突を回避できると共に、衝突回避に関与しない無駄な自動ブレーキ動作を効率的に排除することができ、かつ、ブレーキパッドの磨耗の防止や燃費の向上等に役立たせることができる。また、この処理により、自車両の対象物との衝突を回避できると共に、自車両の完全停止に伴う後続車両の追突等による二次災害発生の危険も同時に回避することができる。
【0037】
なお、上記実施形態では、衝突判定部21が実行中の衝突回避制御を終了するための条件として、自車両と対象物との相対速度が予め定めた閾値を超える場合(図2のステップS106)だけを説明したが、条件はこれに限るものではない。
例えば、予め自車両の前方を、衝突可能性は高いが自車両又は対象物の挙動(操舵等)によっては衝突を回避できる可能性がある領域Xと、衝突可能性が高く自車両又は対象物の挙動があっても衝突を回避できる可能性が殆どない領域Yとに区分しておく。そして、衝突判定部21は、自車両と対象物との相対距離が領域Yに含まれる場面では、上記実施形態の通り自車両と対象物との相対速度が予め定めた閾値を超える場合だけを判断し、自車両と対象物との相対距離が領域Xに含まれる場面では、この場合に加えて、対象物が前方センサ13で検出されなくなった場合や前方センサ13で検出されているが対象物が自車両の進行方向に対して横方向に外れていった場合も判断することが考えられる。
【0038】
<第2の実施形態>
上記第1の実施形態では、対象物が移動物である場合には自車両が対象物に衝突する可能性がなくなった時点、すなわち自車両から見た対象物の相対速度がゼロ以上になったタイミングで衝突回避制御を終了する手法を説明した。
【0039】
しかし、この手法の成立は、衝突回避制御を終了した後で自車両の走行速度が上昇しない又は対象物の走行速度が低下しないことが前提である。衝突回避制御を終了した後で自車両の走行速度が上昇しない又は対象物の走行速度が低下する場合には、上記ステップS106で相対速度監視部23が判断に用いることができる閾値の設定を十分に考慮する必要がある。
【0040】
そこで、この第2の実施形態では、衝突回避制御を終了した後で自車両の走行速度が上昇しない又は対象物の走行速度が低下する場合に、有用な閾値の設定手法を説明する。なお、第2の実施形態に係る衝突回避制御装置の構成は、上記第1の実施形態に係る衝突回避制御装置20の構成と同様であるので、その説明は省略する。
【0041】
以下、本第2の実施形態が第1の実施形態と異なる閾値の設定手法を、図4及び図5をさらに参照して説明する。図4は、第2の実施形態における閾値の設定概念を説明するために、自車両及び対象物の走行状態を示す図である。図5は、実行中の衝突回避制御を終了すべきか否かの境界を概念的に示す図である。
【0042】
図4では、期間[I]〜[III]における自車両及び対象物の走行速度変化は上記図3と同様であり、期間[IV]以降における対象物の走行速度変化が異なる例である。図4の例では、タイミングBにおいて衝突回避制御を終了した後に対象物の走行速度が自車両の走行速度未満まで低下する場合を示している。この場合、タイミングBでは自車両から見た対象物の相対速度がプラス(+)であるが、対象物の走行速度が低下しているため自車両と対象物との車間距離の拡大幅が徐々に小さくなっている(期間[IV])。そして、対象物の走行速度が自車両の走行速度を下回る、すなわち自車両から見た対象物の相対速度がマイナス(−)となる時点から自車両と対象物との車間距離が減少に転じる。この場合、ドライバが自主的にブレーキ操作を行わないと、最終的には、タイミングCにおいて自車両と対象物とが衝突することになる。また、ドライバが自主的にブレーキ操作を行ったとしても、自車両と対象物との車間距離や自車両及び対象物の走行速度や減速度の状態によっては、衝突を回避できない場合も考えられる。そこで、第2の実施形態では、衝突回避制御を終了するタイミングBを与える閾値の効果的に設定することを行う。
【0043】
衝突回避制御を終了したタイミングBにおける、自車両と対象物との車間距離d0、自車両から見た対象物の相対速度vr0、及び対象物の減速度a0と、ドライバ反応時間Tとから、閾値VRを以下のようにして求める。なお、自車両は、一定速度で走行を続けるものと仮定する(加減速度は「0」)。また、ドライバ反応時間Tとは、ドライバが危険を察知してから、危険を回避しようとしてドライバが行ったブレーキ操作に伴った制動力が生じるまで、に要する時間をいう。
【0044】
衝突回避制御を終了したタイミングB以降の任意の時間tにおける自車両と対象物との車間距離d(t)は、次式[1]で表される。なお、対象物が減速している場合における説明であるので、a0>0である。
d(t)=−1/2×a0×t2+vr0×t+d0 … [1]
【0045】
よって、ドライバがブレーキ操作を行って制動力が生じるドライバ反応時間Tが経過した後の自車両と対象物との車間距離d(T)は、次式[2]となる。
d(T)=−1/2×a0×T2+vr0×T+d0 … [2]
【0046】
図4及びこの式[2]を考慮すると、d(T)≧0の条件を満足すれば、自車両と対象物とが衝突する(タイミングC)前にドライバがブレーキ操作を行うことができると推測できる。よって、このd(T)≧0の条件で上記式[2]を変形すると、下記式[3]が得られる。
vr0≧1/2×a0×T−d0/T … [3]
【0047】
この式[3]を図示すると図5のようになる。図5の網掛けの領域は、式[3]が不成立となり、タイミングBで実行中の衝突回避制御を終了すれば自車両と対象物とが衝突する危険性があると判断される領域であり、その他の白色領域は、式[3]が成立して、タイミングBで実行中の衝突回避制御を終了しても自車両と対象物とが衝突する危険性はないと判断される領域である。
【0048】
これらの結果から、相対速度vr0と比較する閾値VRを下記式[4]に基づいて設定することにより、自車両と対象物との車間距離d0、対象物の減速度a0、及びドライバ反応時間Tを考慮した、最適な衝突回避制御の終了処理を実現できる。
VR≧1/2×a0×T−d0/T … [4]
【0049】
以上のように、本発明の第2の実施形態に係る衝突回避制御装置20によれば、自車両と対象物との車間距離、対象物の減速度、及びドライバ反応時間を考慮して相対速度と比較する閾値を設定する。これにより、上記第1の実施形態よりも、自車両と対象物との衝突を確実かつ効果的に回避することができる。
【0050】
<第3の実施形態>
上記第2の実施形態では、ドライバ反応時間Tを考慮した最適な衝突回避制御の終了処理を説明した。しかし、ドライバの居眠りや脇見等による前方不注意が生じていると、ドライバが危険を察知するタイミングが遅れるため、ドライバ反応時間Tが大きく変化するものと考えられる。
そこで、この第3の実施形態では、ドライバの運転状態を観察し、ドライバの居眠りや脇見等による前方不注意の発生に応じて、ドライバ反応時間Tを動的に変更する手法を説明する。
【0051】
図6は、本発明の第3の実施形態に係る衝突回避制御装置40を備えた衝突回避システムの構成例を示す図である。図6に例示した衝突回避システムは、車速センサ11と、前後加速度センサ12と、前方センサ13と、ドライバモニタ14と、衝突回避制御装置40と、ブレーキ制御ユニット30とで構成されている。衝突回避制御装置40は、衝突判定部21と、制動制御部22と、相対速度監視部23と、ドライバ状態監視部44とを備えている。
【0052】
本第3の実施形態に係る衝突回避システムは、上記第1の実施形態に係る衝突回避制御装置40を備えた衝突回避システムと比べて、ドライバモニタ14と、衝突回避制御装置40が備えるドライバ状態監視部44との構成が異なる。以下、この異なる構成を中心に第3の実施形態に係る衝突回避システムを説明し、上記第1の実施形態と同一の機能を有する構成については、同一の参照符号を付してその説明を省略する。
【0053】
ドライバモニタ14は、ステアリングコラムカバー上に設けられるドライバの顔を撮像するモニタカメラ等を構成に含み、ドライバの顔向きや眼の開閉状態等を検出する。このドライバモニタ14で検出された情報は、衝突回避制御装置40に出力される。
【0054】
衝突回避制御装置40のドライバ状態監視部44は、ドライバモニタ14で検出された情報を入力し、この情報を分析してドライバが居眠りをしているか否かやドライバが脇見をしているか否か等に基づいて、前方不注意が生じているか否かを判断する。例えば、ドライバの居眠りは、通常の瞬きよりも長く眼が閉じている場合や顔の角度が水平方向よりも下がっている場合等で判断可能である。また、ドライバによる脇見は、ドライバの顔(又は眼球)が正面を向いていない時間が長い場合等で判断可能である。
【0055】
そして、ドライバ状態監視部44は、ドライバの居眠りや脇見等による前方不注意が生じていることを確認すると、相対速度監視部23に対して、ドライバ反応時間Tを通常よりも大きい値(T+α)に変更するように指示する。なお、変更後の値(T+α)は、生じている前方不注意の度合いに応じて適宜設定すればよい。この前方不注意の度合いは、典型的には、瞬き時間、顔の角度、及び視線の移動量等から複合的に判断して決定される。
【0056】
これらの結果から、前方不注意が生じる場合には下記式[5]に基づいて閾値VRを設定することにより、自車両と対象物との車間距離d0、対象物の減速度a0、及びドライバ反応時間Tを考慮した、最適な衝突回避制御の終了処理を実現できる。
VR≧1/2×a0×(T+α)−d0/(T+α) … [5]
【0057】
以上のように、本発明の第3の実施形態に係る衝突回避制御装置40によれば、ドライバの前方不注意を考慮して相対速度と比較する閾値を設定する。これにより、上記第1及び第2の実施形態よりも、自車両と対象物との衝突を確実かつ効果的に回避することができる。
【産業上の利用可能性】
【0058】
本発明の衝突回避制御装置は、自車両と対象物との衝突を回避する衝突回避システム等に利用可能であり、特に自車両が対象物に衝突する可能性がなくなった時点で実行中の衝突回避制御を終了して速やかに通常の走行状態に戻したい場合等に有用である。
【符号の説明】
【0059】
11 車速センサ
12 前後加速度センサ
13 前方センサ
14 ドライバモニタ
20、40 衝突回避制御装置
21 衝突判定部
22 制動制御部
23 相対速度監視部
30 ブレーキ制御ユニット
44 ドライバ状態監視部
【特許請求の範囲】
【請求項1】
衝突回避制御を行って自車両と対象物との衝突回避を支援する衝突回避制御装置であって、
前記対象物の速度から前記自車両の速度を減算して得られる相対速度を監視し、当該相対速度が予め定めたゼロ以上の閾値を超えるタイミングを検出する監視手段と、
前記衝突回避制御を実行中に、前記監視手段において前記タイミングが検出されれば、前記衝突回避制御を終了する制御手段とを備え、
前記監視手段は、ドライバが危険を察知してからドライバによるブレーキ操作に伴った制動力が生じるまでに要する時間、前記自車両から前記対象物までの相対距離、及び前記対象物の減速度のうち、少なくとも1つに基づいて前記閾値を設定する、衝突回避制御装置。
【請求項2】
前記監視手段は、少なくともドライバの居眠り又は脇見による前方不注意となる状態に応じて前記設定された閾値を調整する、請求項1に記載の衝突回避制御装置。
【請求項3】
前記制御手段は、前記衝突回避制御を実行中に、前記対象物を検出できなくなれば、前記衝突回避制御を終了する、請求項1に記載の衝突回避制御装置。
【請求項4】
衝突回避制御を行って自車両と対象物との衝突回避を支援する衝突回避制御装置で実行される衝突回避制御方法であって、
前記対象物の速度から前記自車両の速度を減算して得られる相対速度を監視するステップと、
前記相対速度が予め定めたゼロ以上の閾値を超えるタイミングを検出するステップと、
前記衝突回避制御を実行中に、前記監視手段において前記タイミングが検出されれば、前記衝突回避制御を終了するステップとを含み、
前記閾値は、ドライバが危険を察知してからドライバによるブレーキ操作に伴った制動力が生じるまでに要する時間、前記自車両から前記対象物までの相対距離、及び前記対象物の減速度のうち、少なくとも1つに基づいて設定される、衝突回避制御方法。
【請求項1】
衝突回避制御を行って自車両と対象物との衝突回避を支援する衝突回避制御装置であって、
前記対象物の速度から前記自車両の速度を減算して得られる相対速度を監視し、当該相対速度が予め定めたゼロ以上の閾値を超えるタイミングを検出する監視手段と、
前記衝突回避制御を実行中に、前記監視手段において前記タイミングが検出されれば、前記衝突回避制御を終了する制御手段とを備え、
前記監視手段は、ドライバが危険を察知してからドライバによるブレーキ操作に伴った制動力が生じるまでに要する時間、前記自車両から前記対象物までの相対距離、及び前記対象物の減速度のうち、少なくとも1つに基づいて前記閾値を設定する、衝突回避制御装置。
【請求項2】
前記監視手段は、少なくともドライバの居眠り又は脇見による前方不注意となる状態に応じて前記設定された閾値を調整する、請求項1に記載の衝突回避制御装置。
【請求項3】
前記制御手段は、前記衝突回避制御を実行中に、前記対象物を検出できなくなれば、前記衝突回避制御を終了する、請求項1に記載の衝突回避制御装置。
【請求項4】
衝突回避制御を行って自車両と対象物との衝突回避を支援する衝突回避制御装置で実行される衝突回避制御方法であって、
前記対象物の速度から前記自車両の速度を減算して得られる相対速度を監視するステップと、
前記相対速度が予め定めたゼロ以上の閾値を超えるタイミングを検出するステップと、
前記衝突回避制御を実行中に、前記監視手段において前記タイミングが検出されれば、前記衝突回避制御を終了するステップとを含み、
前記閾値は、ドライバが危険を察知してからドライバによるブレーキ操作に伴った制動力が生じるまでに要する時間、前記自車両から前記対象物までの相対距離、及び前記対象物の減速度のうち、少なくとも1つに基づいて設定される、衝突回避制御方法。
【図1】



【図2】
【図3】
【図4】
【図5】

【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2012−218551(P2012−218551A)
【公開日】平成24年11月12日(2012.11.12)
【国際特許分類】
【出願番号】特願2011−85427(P2011−85427)
【出願日】平成23年4月7日(2011.4.7)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
【公開日】平成24年11月12日(2012.11.12)
【国際特許分類】
【出願日】平成23年4月7日(2011.4.7)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
[ Back to top ]