
衝突回避支援装置及びそれを搭載した車両
【課題】自車の推定進路内に占める障害物の大きさと障害物との相対速度に基づいて介入開始タイミングを変化させ、安全性を損なうことなく介入操作による運転者に対する違和感を低減することができる衝突回避支援装置の提供。
【解決手段】介入タイミング算出手段103は、前方障害物との距離情報と前方障害物と自車との相対速度情報とから前記介入制御を開始する介入予定タイミングを算出する。進路余裕度算出手段112は、自車の走行する予定進路にある前方障害物の横方向の大きさと位置情報から前方障害物が自車の推定進路内を塞ぐ大きさを算出し、介入タイミング補正手段104は、前記進路余裕度算出手段112で算出した推定進路内を塞ぐ大きさによって前記介入予定タイミングを補正して介入開始タイミングを決定する。
【解決手段】介入タイミング算出手段103は、前方障害物との距離情報と前方障害物と自車との相対速度情報とから前記介入制御を開始する介入予定タイミングを算出する。進路余裕度算出手段112は、自車の走行する予定進路にある前方障害物の横方向の大きさと位置情報から前方障害物が自車の推定進路内を塞ぐ大きさを算出し、介入タイミング補正手段104は、前記進路余裕度算出手段112で算出した推定進路内を塞ぐ大きさによって前記介入予定タイミングを補正して介入開始タイミングを決定する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両用の衝突回避支援装置に関し、特に自車両と障害物との横方向距離を考慮することによって、車両運転者の意思によらない自動介入操作を好適に実行する衝突回避支援装置に関する。
【背景技術】
【0002】
前方障害物に対して衝突の可能性がある状況において自動的に制動操作等の介入操作を行い衝突を回避する従来の衝突回避支援装置としては、例えば、衝突の可能性がある場合に警報を発したり或いは車両運転者の意思によらずに自動的に車両を制動させる衝突回避支援装置が知られている(例えば特許文献1参照)。特許文献1に示されている衝突回避支援装置では障害物までの距離と車速から回避可能な最小制動開始距離が求められ、この最小制動開始距離未満の状況によっても操舵操作が行われた場合は介入制動を開始しないことで不必要な介入制動を抑制し、運転者への違和感を低減している。
【0003】
【特許文献1】特開2004−224309号
【発明の開示】
【発明が解決しようとする課題】
【0004】
しかしながら、上記従来技術にあっては、運転者の操舵操作による回避時に介入制動が抑制されることで運転者の違和感は低減されるものの、障害物による進路の占有割合を考慮していないため、操舵が不要な程度の障害物に対して介入制動が起きてしまう可能性があるし、逆に操舵回避が困難な場合でも運転者による操舵操作があれば介入制動を遅らせてしまい、衝突時の速度を十分に低減することができなくなってしまうという問題があった。
【0005】
本発明は上記問題に着目してなされたものであり、その目的とするところは、前方障害物との衝突可能性に応じて該障害物との衝突が回避されるように制動操作又は操舵操作もしくは制動操作及び操舵操作によって前方障害物との衝突を回避するように介入制御する衝突回避支援システムにおいて、自車の推定進路内に占める障害物の大きさと障害物との相対速度に基づいて介入開始タイミングを変化させ、安全性を損なうことなく介入操作による運転者に対する違和感を低減することができる衝突回避支援装置を提供することにある。
【課題を解決するための手段】
【0006】
上記の目的を達成するため、本発明の衝突回避支援システムは、前方障害物との衝突の可能性に応じて車両の制動操作又は操舵操作もしくは制動操作及び操舵操作によって前方障害物との衝突を回避するように介入制御するものであり、前方障害物との距離情報と前方障害物と自車との相対速度情報とから前記介入制御を開始する介入予定タイミングを算出する介入タイミング算出手段と、自車の走行する予定進路にある前方障害物の横方向の大きさと位置情報から前方障害物が自車の推定進路内を塞ぐ大きさを算出する進路余裕度算出手段と、前記進路余裕度算出手段で算出した推定進路内を塞ぐ大きさによって前記介入予定タイミングを補正して介入開始タイミングを決定する介入タイミング補正手段を備えることを特徴としている。
【0007】
本発明の衝突回避支援システムは、介入タイミング算出手段が、車両の前方に取り付けられた距離計測装置で計測した、前方障害物との距離と、自車と前方障害物との相対速度とから介入制御を開始する介入予定タイミングを算出し、進路余裕度算出手段が、車両の前方に取り付けられた横方向位置計測手段で計測した、前方障害物の横方向の大きさと位置に基づいて前方障害物が自車の推定進路内を塞ぐ大きさを算出することを特徴としている。
【0008】
本発明の衝突回避支援システムでは、前方障害物が自車の推定進路内を塞ぐ大きさによって介入予定タイミングを補正して介入開始タイミングを決定しており、前方障害物が自車の推定進路内を僅かしか塞がない場合には、介入開始タイミングを遅くするようにしているので、障害物を容易に回避できる場合における不要な介入制御が低減され、運転者への違和感を低減できる。
【0009】
また、本発明の衝突回避支援システムは、横方向位置計測手段は車両の前方に取り付けられた撮像装置を備え、進路余裕度算出手段が、該撮像装置の画像に基づいて道路上の白線を基準とした前方障害物の位置と大きさを算出するとともに、前記白線を基準とした自車の推定進路を推定し、前方障害物の位置及び大きさと自車の前記推定進路とに基づいて前方障害物が自車の推定進路内を塞ぐ大きさを算出することを特徴としている。
【0010】
本発明の衝突回避支援システムでは、ビデオカメラなどの撮像装置で撮像した画像に基づいて自車の走行する車線範囲における障害物の大きさと位置を把握することで障害物と同時に道路上の路肩や車線及びセンターラインなどの位置をも把握でき、実際の車線範囲に対して障害物がどの程度塞いでいるかをより高精度に判定することが可能となる。
【0011】
また、本発明の衝突回避支援システムは、介入タイミング補正手段が、前方障害物が自車の推定進路内を塞ぐ大きさと障害物と自車との相対速度に基づいて制動操作による介入制御か操舵操作による介入制御かを選択することを特徴としており、前方障害物を回避するのに有利な介入手段の選択を優先的に行い、介入操作を効果的に行うことができる。
【0012】
さらに、本発明の衝突回避支援システムは、車両の後部に取り付けられた後側方距離計測装置を備え、介入タイミング補正手段が、前記後側方距離計測装置による後側方障害物の位置情報を考慮して、制動操作による介入制御か操舵操作による介入制御かを選択することを特徴としており、後側方における障害物の有無、特に隣接車線から自車に追い付いてくる他車両の有無を確認して操舵による介入操作が安全に行えるか否かを考慮しており、衝突回避支援システムの安全性を一層増すことができる。
【0013】
さらに、本発明の衝突回避支援システムは、路面情報推定手段を備え、介入タイミング補正手段が、前記路面情報推定手段で推定された路面状況を考慮して前記介入開始タイミングを決定することを特徴としており、路面状況、特に路面の滑り易さの情報を考慮して介入開始タイミングを遅らせる量を少なくし、路面状況に適した介入開始タイミングとすることができ、衝突回避支援システムの安全性を一層増すことができる。
【0014】
さらに、本発明の衝突回避支援システムは、運転者を判別する運転者判別手段を備え、介入タイミング補正手段が、前記運転者判別手段で判別した運転者情報に基づいて前記介入開始タイミングを決定することを特徴としており、介入タイミングの補正に運転者個人の運転傾向を反映することができ、介入制御による運転者への違和感を低減できる。
【0015】
さらに、本発明の衝突回避支援システムは、外部からの通信が可能な外部通信手段を備え、介入タイミング算出手段が、前記外部通信手段によって得られた障害物の位置及び行動に関する情報を考慮して介入予定タイミングを算出することを特徴としており、距離計測装置に加え基地局からの情報により自車の予定進路にある障害物を把握することができるので、介入タイミング算出手段は障害物を確実に把握して介入予定タイミングを算出することができる。
【0016】
さらに、本発明の車両は、前記した衝突回避支援システムを搭載していることを特徴としている。
【発明の効果】
【0017】
本発明の衝突回避支援システムは、前方障害物が自車の推定進路内を塞ぐ大きさによって介入予定タイミングを補正して介入開始タイミングを決定し、前方障害物が自車の推定進路内を塞ぐ大きさが小さい場合には、介入予定タイミングを遅くするように補正して介入開始タイミングを決定しているので、障害物を容易に回避できる場合における不要な介入制御が低減され、運転者への違和感を低減できる。
【発明を実施するための最良の形態】
【0018】
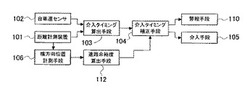
以下に、本発明の衝突回避支援システムを図に基づいて説明する。図1は、本発明に係る衝突回避支援システムの一実施形態の全体構成を示している。
【0019】
距離計測装置101は、車両前部に取り付けられたレーザレーダで構成されており、前方障害物との距離を計測するものであり、また、前回計測した測定距離と今回計測した測定距離とにより自車と前方障害物との相対速度を算出する。距離計測装置101はレーザレーダに限られず、前方障害物との距離を計測できればよいものである。距離計測装置101をミリ波レーダにすると、前方障害物との距離と相対速度を同時に計測できる。
【0020】
自車速センサ102は、トランスミッション出力軸の回転速度すなわち車速に比例した数の出力パルスを発生するように取り付けられており、自車の速度を計測する。また、自車速センサ102としては、各車輪毎に回転速度に比例したパルスを発生するように取り付けてもよい。介入タイミング算出手段103は、距離計測装置101で計測された前方障害物との距離と、自車と前方障害物との相対速度とから、そのままの速度で走行を続けた場合に前方障害物と衝突するまでの余裕時間である衝突到達時間TTCを算出するとともに、前方障害物との衝突を回避するために必要な衝突回避時間TTB、すなわち、自車と前方障害物とが所定の距離離れた位置で、自車が制動操作によって前方障害物との相対速度を0とするのに必要な時間を算出する。衝突到達時間TTCが衝突回避時間TTBとなったときは衝突を回避するための制動操作を開始する予定のときであるから、衝突回避時間TTBは介入予定タイミングといえる。
【0021】
横方向位置計測手段106は、レーザレーダで構成された距離計測装置101を用いており、距離計測装置101を横方向にスキャンさせて、自車の走行する予定進路における障害物の大きさと位置を計測する。横方向位置計測手段106は、距離計測装置101がミリ波レーダで構成されている場合であれば複数アンテナの出力を用いた開口合成により横方向の情報を再構成するようにしてもよい。また、横方向位置計測手段106は、距離計測装置101を用いないで、障害物の横方向の位置を検出するための手段を新たに設けてもよい。
【0022】
進路余裕度算出手段112は、自車が走行すると推定される推定進路を演算するとともに、横方向位置計測手段106が計測した自車の走行する予定進路にある障害物の大きさと位置に基づいて該障害物の横方向位置が、自車の推定進路内に占める大きさ(幅)を算出する。
【0023】
介入タイミング補正手段104は、進路余裕度算出手段112で算出された該推定進路内に占める前方障害物の大きさによって介入タイミング算出手段103により算出された衝突回避時間TTBに対して介入操作を補正する。すなわち、自車の推定進路幅内に占める前方障害物の大きさが小さい場合には、運転者の操舵操作により短時間で前方障害物をさけることができるので、衝突回避時間TTBを短縮するように補正して衝突回避決定時間TTDを決定する。そして、衝突到達時間TTCが衝突回避決定時間TTDになると、制動操作手段による制動介入を開始する信号を介入手段105に出力する。衝突到達時間TTCが衝突回避決定時間TTDとなったときは衝突を回避するための制動操作を開始するので、衝突回避決定時間TTDは介入開始タイミングといえる。
【0024】
介入手段105は、本実施形態ではブレーキを作動させる制動操作によって衝突を回避する制動操作手段を備えるものであり、介入タイミング補正手段104から制動介入を開始する信号が入力されると、制動操作手段による制動介入を開始する。このようにして、前方障害物との衝突の可能性に応じて該障害物との衝突が回避されるように車両の制動力を制御する。
【0025】
本実施形態では、衝突回避時間TTBを補正することによって障害物回避の容易さに応じて介入開始タイミングを遅らせ、その間に運転者による障害物の回避操作が行われると制動介入を行う必要がなくなるので、不要な介入を減らして運転者への違和感を低減することが可能となる。警報手段110は、制動介入を開始するときやその直前に介入制御が行われること、あるいは、回避するための操作が必要なこと等を運転者に音等により報知するものである。本実施形態では、前方障害物との衝突を回避するのに制動操作によって介入制御を行っているが、操舵操作による介入制御によって前方障害物との衝突を回避するように構成してもよい。
【0026】
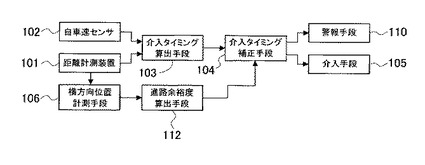
次に、前述の進路余裕度算出手段112において、自車が走行する推定進路の推定の仕方(演算)について図2を用いて説明する。図2において、1は自車、2は前方障害物(先行他車)である。自車1は、内界センサとして自車速センサ102、操舵角センサ、ヨーレートセンサが設けられており、自車速度、操舵角及びヨーレートを検出する。したがって、自車速センサ102、操舵角センサ、ヨーレートセンサからの信号に基づいて、自車1の操舵角及び自車速度の情報から幾何学的に自車がこれから通過すると推定される推定進路201を演算する。この推定進路201と横方向位置計測手段106で計測した障害物2の位置と横方向の大きさを進路余裕度算出手段112によって比較することにより、障害物2の横方向位置が自車の推定進路幅201内に占める大きさ(幅)d1を算出することができる。より望ましくは、例えば自車1の走行運動モデルをオブザーバとして用い、操舵角、自車速度に加えてヨーレートや横加速度などの物理量を検出して入力することにより、より精度良く推定進路201を求めることが可能である。
【0027】
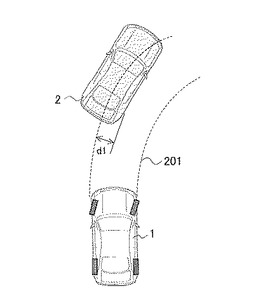
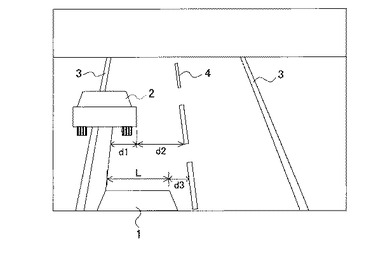
さらに、自車の走行する推定進路の別の推定の仕方について図3を用いて説明する。図3は自車1と障害物2の位置関係を上から見た図であり、自車1が走行する道路は路肩の白線3及びセンターライン4により定められている。この道路に路上の位置を特定するための手段としての磁気ネイル301が埋め込まれており、自車1はこの磁気ネイル301の位置を計測して自車の現在の位置(d3)を把握するとともに内界センサからの信号に基づいて自車の走行する推定進路を、センターライン4(又は路肩の白線3)を基準として推定できる。また、障害物の位置もセンターライン4を基準として把握する。この方法によれば、障害物2の横方向位置が自車の推定進路内に占める大きさd1だけでなく、自車1が通過可能な道路の幅d2も求めることができるため、介入予定タイミングを補正してより的確な介入開始タイミングを決定することが可能となる。
【0028】
以上のように、本実施形態では、自車1の走行する予定進路における障害物2の大きさと位置を計測して障害物の横方向位置が自車の推定進路内に占める大きさd1もしくは自車1の通過可能幅d2を確認し、ここでもし障害物の位置が自車の推定進路内を大きく塞いでいないと判定した場合には、介入開始タイミングを当初よりも遅らせるように補正することで回避が容易な場合における不要な介入操作が低減され、運転者への違和感を低減することが可能となる。
【0029】
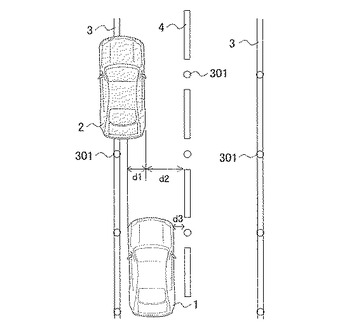
図4は、図1における横方向位置計測手段106が車両前部に取り付けられたCCDカメラからなる撮像装置で構成されている場合において、自車が走行する推定進路の推定の仕方を説明するためのものであり、撮像装置で撮像した映像を示している。車両前部に取り付けられ撮像装置からは自車1から見た車両前方の映像が進路余裕度算出手段112に出力される。この映像には、前方の障害物2の他に、自車1が走行している道路の路肩の白線3及びセンターライン4、さらに自車1自身の車体の一部が含まれるように、自車1への撮像装置の取り付け位置が選択されている。
【0030】
進路余裕度算出手段112は、この映像に対してエッジ抽出や特徴点抽出(得られたエッジ情報から直線や自動車、人などのパターンを抽出する処理)などの画像処理を施すことにより、風景映像の中から前述の路肩の白線3、センターライン4、自車1の車体等の計測対象を分離することができる。さらに撮像装置の自車1への取り付け位置は既知であるので、内界センサからの信号に基づいて自車の走行する推定進路を、センターライン4(又は路肩の白線3)を基準として推定できる。また、対象物位置は撮像装置の光学系における対象物と撮像素子上の像の対照関係から求められることは周知の事実であり、また、映像中の自車1の幅Lなどは既知の長さであるので、これを利用するとともに前方障害物2までの距離により横方向距離の補正を行い、センターライン4(又は路肩の白線3)を基準とした前方障害物2の位置と大きさを算出する。このようにして、自車の走行する道路の幅や障害物2の横方向位置を自車1に取り付けた装置だけで計測することが可能となり、前方障害物2の横方向の位置が自車の同一車線上に占める大きさd1及びd2が求められることから介入予定タイミングを補正してより的確な介入開始タイミングを決定することが可能となる。
【0031】
以上のように、本実施形態における横方向位置計測手段106では、自車の走行する車線範囲における障害物の大きさと位置を計測するためにビデオカメラなどの撮像装置を使用することで障害物と同時に自車1の走行する道路上の白線、すなわち路肩の車線及びセンターラインなどの位置を計測し、実際の車線範囲に対して障害物がどの程度塞いでいるかをより高精度に判定することが可能である。これにより、障害物の横方向位置が自車の推定車線内に占める大きさd1及び自車1の通過可能幅d2を確認し、ここでもし障害物の位置が自車の推定進路内を大きく塞いでいないと判定した場合には、介入操作タイミングを当初の介入操作よりも遅らせるように補正することで回避が容易な場合における不要な介入操作が低減され、運転者への違和感を低減することが可能となる。
【0032】
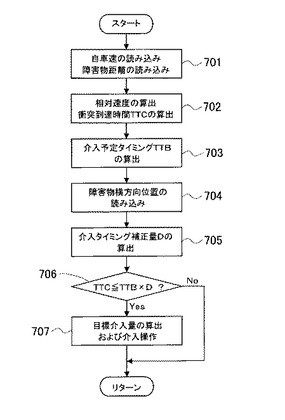
次に、図5のフローチャートにより、本発明の衝突回避支援システムにおける制御処理について説明する。まず、ステップ701で、自車速度を読み込むとともに障害物との距離を読み込み、テップ702において、障害物との相対速度を算出し、障害物との距離と相対速度から、そのままの速度で走行を続けたときに前方障害物と衝突するまでの時間である衝突到達時間TTCを算出する。また、ステップ703で、相対速度に基づいて前方障害物との衝突を回避するのに必要な、介入予定タイミングとなる衝突回避時間TTBを算出する。その後ステップ704で、障害物の横方向位置の読み込みを行なう。ステップ705においては、自車の推定進路を演算し、障害物が推定進路内に占める大きさを算出するとともに、障害物が推定進路内に占める大きさに基づいて介入タイミング補正量Dを算出する。ステップ706では、ステップ703で算出した衝突回避時間TTBを介入タイミング補正量Dにより補正して介入開始タイミング(TTB×D)を算出し、これを衝突到達時間TTCと比較することで介入制御を開始するか否かを判定する。もし、衝突到達時間TTCが介入開始タイミング(TTB×D)以下であれば、ステップ707により制動操作または操舵操作による目標介入量の算出及び介入制御を行う。一方、衝突到達時間TTCが介入開始タイミング(TTB×D)に達していなければ、介入制御を行なわずに処理を終える。このような処理手順を制御周期ごとに繰り返すことで車両の衝突回避の支援を行なう。
【0033】
図6、7により、本発明の衝突回避支援システムの他の実施形態を説明する。この実施形態では、図1における介入手段105が、制動操作によって衝突を回避する制動介入手段と操舵操作によって衝突を回避する操舵介入手段等の複数の介入手段を備えている。
【0034】
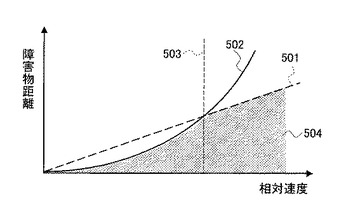
図6に示すように、制動介入手段による衝突回避可能距離と操舵介入手段による衝突回避可能距離とは障害物との相対速度の違いによって異なる。図6において、線501は操舵操作によって衝突回避するのに必要な操舵回避限界距離を示し、線502は制動操作によって衝突回避するのに必要な制動回避限界距離を示している。すなわち、縦軸の障害物までの距離がこれらの回避限界距離を下回る場合は衝突回避が不可能であることを示している。線502の制動回避限界距離は、車両の減速度が最大、すなわち路面摩擦係数で決まる一定の減速度である場合の限界距離で、相対速度の2乗に比例して増加する。一方、線501の操舵回避限界距離は、操舵により一定速度の横移動が生じると仮定した場合の限界距離であり、相対速度に対して線形に増加する。すなわち、相対速度が値503より遅いときには、操舵操作によって衝突を回避するよりも制動操作によって衝突を回避する方が有利であり、また、相対速度が値503より速いときには、制動操作によるよりも操舵操作による方が有利になる。よって、制動介入手段による介入制御を行うか、操舵介入手段による介入制御を行うか、その介入手段を適切に選択することによって、図6の範囲504のように回避限界距離をより小さくすることが可能である。
【0035】
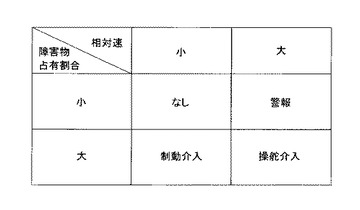
そこで、図1の介入タイミング補正手段104中に、図7に示すような介入手段選択テーブルを備えておき、どの介入手段を優先して動作させたらよいかを適切に選択する。図7には、障害物に対する相対速度と障害物が自車の推定進路内を塞ぐ大きさの2つのパラメータを用い、相対速度の大小と障害物が自車の推定進路内を塞ぐ大きさの大小により4つの範囲に分け、その範囲で動作させるべき介入手段を示している。障害物が自車の推定進路内を塞ぐ幅が小さく操舵操作することにより回避が容易な場合には、相対速度が大きいときは警報手段110により運転者に回避操作を促すが、相対速度が小さいときは介入制御を行っていない。しかし、どの介入手段を優先して動作させるかの介入手段選択テーブルはこれに限定されるものではない。
【0036】
また、介入タイミング補正手段104は制動介入手段と操舵介入手段との2つの介入制御を同時に行なうようにしてもよく、例えば、相対速度が大きくかつ障害物が自車の推定進路内を塞ぐ幅が大きい場合には制動介入手段によって制動するとともに操舵介入手段によって操舵して衝突を回避する。この場合には、介入手段選択テーブルの範囲によってそれぞれの介入手段による介入操作の割合が異なるようにテーブルを構成してもよい。
【0037】
以上のように本実施形態の介入タイミング補正手段104では、障害物との相対速度と障害物が自車の自車の推定進路内を塞ぐ幅の大きさに基づいて衝突を回避するための介入手段を選択し、介入操作を効果的に行うことが可能となる。
【0038】
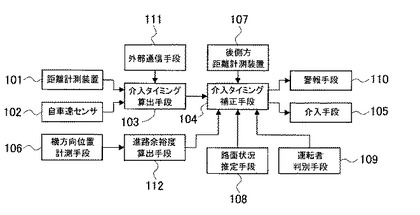
図8は、本発明の衝突回避支援システムの他の実施形態を示しており、図1に示す実施形態のものと同じ構成には同じ符号を付している。本実施形態では、図1に示す衝突回避支援システムと比べ、後側方距離測定装置、路面状況推定手段、運転者判別手段及び外部通信手段が追加されている。
【0039】
後側方距離計測装置107は、車両後部に取り付けられたレーザレーダで構成されており、後方障害物との距離を計測するものであり、また、前回計測した測定距離と今回計測した測定距離により自車と前方障害物との相対速度をも測定する。ここで後側方距離計測装置107はレーザレーダに限られず、ミリ波レーダでもよく、ミリ波レーダであれば、後方障害物との距離と相対速度を同時に計測できる。そして、後側方距離計測装置107で計測した後方障害物についての情報は介入タイミング補正手段104に入力され、介入タイミング補正手段104は、隣接車線で後方から追い上げてくる車両等の有無を考慮し、操舵操作による衝突回避を安全に行えるかを判定した上で介入手段の選択を行うので、衝突回避支援システムの安全性を一層増すことができる。
【0040】
路面状況推定手段108は、路面の滑り易さ等の路面状況を把握するものであり、駆動輪である前輪の速度と後輪速度との差に基づいて路面摩擦係数を把握し、この路面状況推定手段108で把握された路面摩擦係数の情報を介入タイミング補正手段104に入力している。また、路面摩擦係数の把握は制動時の車輪変化速度から把握してもよい。そして、路面摩擦係数により図6で示した制動回避限界距離と操舵回避限界距離とが変わることになるので、介入タイミング補正手段104は、路面摩擦係数をも考慮した介入タイミング補正量Dによって衝突回避時間TTBを補正して介入開始タイミング(TTB×D)を算出する。本実施形態では、雨や冬季の凍結、積雪などの路面状況、特に路面の滑り易さを考慮して介入開始タイミングを決定しているので、衝突回避支援システムの安全性を一層増すことができる。
【0041】
運転者判別手段109は、運転者ごとのキーを用意しこのキーを挿入することにより運転者を判別する。車間距離を大きく保ってする運転する運転者によっては介入タイミングが遅延すると却って恐怖感やシステムへの不信感を増大してしまう可能性があるし、逆に普段から車間距離の小さい状態で運転をしている運転者にとっては、介入予定タイミングの遅延補正をしてもなお御節介な介入をするシステムだと感じる可能性がある。そこで、運転者判別手段109で運転者を判別し、判別した運転者の情報を介入タイミング補正手段104に入力し、介入タイミング補正手段104が運転者個別の好みに適応するように運転者に応じた介入タイミング補正をするように制御する。ここで、運転者判別手段109としては、運転者が選択ボタンを押下させる簡便なものでもよいし、運転者を撮影するカメラ、例えば居眠り検知システムのカメラを流用して顔認識データから運転者を特定するもの、ハンドルなどに取り付けた静脈認証システムによって運転者を特定するもの、カーナビやハンズフリーフォンの音声入力による音声認識によって運転者を特定するものなどのいずれであってもよい。
【0042】
以上のように、本実施形態では運転者判別手段109を備え、運転者の運転傾向を考慮して介入予定タイミングの補正を行うことにより、介入制御による運転者への違和感を低減できる。
【0043】
外部通信手段111は、道路側に設けられ基地局と無線等の通信手段によって交信し、他車両等の障害物の情報を入手して介入タイミング算出手段103に入力する。外部通信手段111は、例えば、塀等によって距離計測装置101で検知することのできなかった車両の情報を入手可能である。介入タイミング算出手段103は、距離計測装置101に加え基地局からの情報により自車の予定進路にある障害物を把握することができるので、介入タイミング算出手段103は、障害物を確実に把握して介入予定タイミングを算出することができる。また、外部通信手段111は、本実施形態と同様の衝突回避支援システムを搭載した近隣の他車両と交信してもよいし、道路上に備え付けたセンサやビーコン、カメラなどの情報収集手段によって得られる車両位置情報を収集してもよい。前者の近隣の他車両である場合には、例えば各車両が備えたGPSシステムによる車両位置情報を付加して無線通信手段によって相互に情報を授受したり、同様の衝突回避支援システムを搭載した車両同士で位置情報や加減速、旋回などの行動情報を共有することで、該介入開始タイミングを決定するための障害物の位置情報をより詳細で高精度なものにすることが可能になる。
【0044】
本実施形態の衝突回避支援システムは、後側方距離測定装置107、路面状況推定手段108、運転者判別手段109及び外部通信手段111を備えているが、これらは全て備える必要はなく、適宜必要に応じて前記手段を選択して備えればよく、例えば、後側方距離測定装置107のみを備えてもよい。
【0045】
以上、本発明の実施形態について説明したが、本発明は前記実施形態に限定されるものでなく、特許請求の範囲に記載された発明の精神を逸脱しない範囲で、設計において種々の変更ができるものである。
【図面の簡単な説明】
【0046】
【図1】本発明の衝突回避支援システムの一実施形態を示す全体構成図。
【図2】本発明の衝突回避支援システムにおいて、自車の走行する推定進路の推定方法を説明するための図。
【図3】本発明の衝突回避支援システムにおいて、自車の走行する推定進路の他の推定方法を説明するための図。
【図4】本発明の衝突回避支援システムにおいて、自車の走行する推定進路のさらに他の推定方法を説明するための図。
【図5】本発明の衝突回避支援システムにおける処理のフローチャートを示す図。
【図6】障害物との相対速度による介入手段毎の回避可能距離を示す図。
【図7】本発明の衝突回避支援システムにおける介入タイミング補正手段104の介入手段選択テーブルを示す図。
【図8】本発明の衝突回避支援システムの他の実施形態を示す全体構成図。
【符号の説明】
【0047】
1…自車
2…障害物
3…白線
4…センターライン
101…距離計測装置
102…自車速センサ
103…介入タイミング算出手段
104…介入タイミング補正手段
105…介入手段
106…横方向位置計測手段
107…後側方距離測定装置
108…路面状況推定手段
109…運転者判別手段
110…警報手段
111…外部通信手段111
112…進路余裕度算出手段
201…推定進路
301…磁気ネイル
【技術分野】
【0001】
本発明は、車両用の衝突回避支援装置に関し、特に自車両と障害物との横方向距離を考慮することによって、車両運転者の意思によらない自動介入操作を好適に実行する衝突回避支援装置に関する。
【背景技術】
【0002】
前方障害物に対して衝突の可能性がある状況において自動的に制動操作等の介入操作を行い衝突を回避する従来の衝突回避支援装置としては、例えば、衝突の可能性がある場合に警報を発したり或いは車両運転者の意思によらずに自動的に車両を制動させる衝突回避支援装置が知られている(例えば特許文献1参照)。特許文献1に示されている衝突回避支援装置では障害物までの距離と車速から回避可能な最小制動開始距離が求められ、この最小制動開始距離未満の状況によっても操舵操作が行われた場合は介入制動を開始しないことで不必要な介入制動を抑制し、運転者への違和感を低減している。
【0003】
【特許文献1】特開2004−224309号
【発明の開示】
【発明が解決しようとする課題】
【0004】
しかしながら、上記従来技術にあっては、運転者の操舵操作による回避時に介入制動が抑制されることで運転者の違和感は低減されるものの、障害物による進路の占有割合を考慮していないため、操舵が不要な程度の障害物に対して介入制動が起きてしまう可能性があるし、逆に操舵回避が困難な場合でも運転者による操舵操作があれば介入制動を遅らせてしまい、衝突時の速度を十分に低減することができなくなってしまうという問題があった。
【0005】
本発明は上記問題に着目してなされたものであり、その目的とするところは、前方障害物との衝突可能性に応じて該障害物との衝突が回避されるように制動操作又は操舵操作もしくは制動操作及び操舵操作によって前方障害物との衝突を回避するように介入制御する衝突回避支援システムにおいて、自車の推定進路内に占める障害物の大きさと障害物との相対速度に基づいて介入開始タイミングを変化させ、安全性を損なうことなく介入操作による運転者に対する違和感を低減することができる衝突回避支援装置を提供することにある。
【課題を解決するための手段】
【0006】
上記の目的を達成するため、本発明の衝突回避支援システムは、前方障害物との衝突の可能性に応じて車両の制動操作又は操舵操作もしくは制動操作及び操舵操作によって前方障害物との衝突を回避するように介入制御するものであり、前方障害物との距離情報と前方障害物と自車との相対速度情報とから前記介入制御を開始する介入予定タイミングを算出する介入タイミング算出手段と、自車の走行する予定進路にある前方障害物の横方向の大きさと位置情報から前方障害物が自車の推定進路内を塞ぐ大きさを算出する進路余裕度算出手段と、前記進路余裕度算出手段で算出した推定進路内を塞ぐ大きさによって前記介入予定タイミングを補正して介入開始タイミングを決定する介入タイミング補正手段を備えることを特徴としている。
【0007】
本発明の衝突回避支援システムは、介入タイミング算出手段が、車両の前方に取り付けられた距離計測装置で計測した、前方障害物との距離と、自車と前方障害物との相対速度とから介入制御を開始する介入予定タイミングを算出し、進路余裕度算出手段が、車両の前方に取り付けられた横方向位置計測手段で計測した、前方障害物の横方向の大きさと位置に基づいて前方障害物が自車の推定進路内を塞ぐ大きさを算出することを特徴としている。
【0008】
本発明の衝突回避支援システムでは、前方障害物が自車の推定進路内を塞ぐ大きさによって介入予定タイミングを補正して介入開始タイミングを決定しており、前方障害物が自車の推定進路内を僅かしか塞がない場合には、介入開始タイミングを遅くするようにしているので、障害物を容易に回避できる場合における不要な介入制御が低減され、運転者への違和感を低減できる。
【0009】
また、本発明の衝突回避支援システムは、横方向位置計測手段は車両の前方に取り付けられた撮像装置を備え、進路余裕度算出手段が、該撮像装置の画像に基づいて道路上の白線を基準とした前方障害物の位置と大きさを算出するとともに、前記白線を基準とした自車の推定進路を推定し、前方障害物の位置及び大きさと自車の前記推定進路とに基づいて前方障害物が自車の推定進路内を塞ぐ大きさを算出することを特徴としている。
【0010】
本発明の衝突回避支援システムでは、ビデオカメラなどの撮像装置で撮像した画像に基づいて自車の走行する車線範囲における障害物の大きさと位置を把握することで障害物と同時に道路上の路肩や車線及びセンターラインなどの位置をも把握でき、実際の車線範囲に対して障害物がどの程度塞いでいるかをより高精度に判定することが可能となる。
【0011】
また、本発明の衝突回避支援システムは、介入タイミング補正手段が、前方障害物が自車の推定進路内を塞ぐ大きさと障害物と自車との相対速度に基づいて制動操作による介入制御か操舵操作による介入制御かを選択することを特徴としており、前方障害物を回避するのに有利な介入手段の選択を優先的に行い、介入操作を効果的に行うことができる。
【0012】
さらに、本発明の衝突回避支援システムは、車両の後部に取り付けられた後側方距離計測装置を備え、介入タイミング補正手段が、前記後側方距離計測装置による後側方障害物の位置情報を考慮して、制動操作による介入制御か操舵操作による介入制御かを選択することを特徴としており、後側方における障害物の有無、特に隣接車線から自車に追い付いてくる他車両の有無を確認して操舵による介入操作が安全に行えるか否かを考慮しており、衝突回避支援システムの安全性を一層増すことができる。
【0013】
さらに、本発明の衝突回避支援システムは、路面情報推定手段を備え、介入タイミング補正手段が、前記路面情報推定手段で推定された路面状況を考慮して前記介入開始タイミングを決定することを特徴としており、路面状況、特に路面の滑り易さの情報を考慮して介入開始タイミングを遅らせる量を少なくし、路面状況に適した介入開始タイミングとすることができ、衝突回避支援システムの安全性を一層増すことができる。
【0014】
さらに、本発明の衝突回避支援システムは、運転者を判別する運転者判別手段を備え、介入タイミング補正手段が、前記運転者判別手段で判別した運転者情報に基づいて前記介入開始タイミングを決定することを特徴としており、介入タイミングの補正に運転者個人の運転傾向を反映することができ、介入制御による運転者への違和感を低減できる。
【0015】
さらに、本発明の衝突回避支援システムは、外部からの通信が可能な外部通信手段を備え、介入タイミング算出手段が、前記外部通信手段によって得られた障害物の位置及び行動に関する情報を考慮して介入予定タイミングを算出することを特徴としており、距離計測装置に加え基地局からの情報により自車の予定進路にある障害物を把握することができるので、介入タイミング算出手段は障害物を確実に把握して介入予定タイミングを算出することができる。
【0016】
さらに、本発明の車両は、前記した衝突回避支援システムを搭載していることを特徴としている。
【発明の効果】
【0017】
本発明の衝突回避支援システムは、前方障害物が自車の推定進路内を塞ぐ大きさによって介入予定タイミングを補正して介入開始タイミングを決定し、前方障害物が自車の推定進路内を塞ぐ大きさが小さい場合には、介入予定タイミングを遅くするように補正して介入開始タイミングを決定しているので、障害物を容易に回避できる場合における不要な介入制御が低減され、運転者への違和感を低減できる。
【発明を実施するための最良の形態】
【0018】
以下に、本発明の衝突回避支援システムを図に基づいて説明する。図1は、本発明に係る衝突回避支援システムの一実施形態の全体構成を示している。
【0019】
距離計測装置101は、車両前部に取り付けられたレーザレーダで構成されており、前方障害物との距離を計測するものであり、また、前回計測した測定距離と今回計測した測定距離とにより自車と前方障害物との相対速度を算出する。距離計測装置101はレーザレーダに限られず、前方障害物との距離を計測できればよいものである。距離計測装置101をミリ波レーダにすると、前方障害物との距離と相対速度を同時に計測できる。
【0020】
自車速センサ102は、トランスミッション出力軸の回転速度すなわち車速に比例した数の出力パルスを発生するように取り付けられており、自車の速度を計測する。また、自車速センサ102としては、各車輪毎に回転速度に比例したパルスを発生するように取り付けてもよい。介入タイミング算出手段103は、距離計測装置101で計測された前方障害物との距離と、自車と前方障害物との相対速度とから、そのままの速度で走行を続けた場合に前方障害物と衝突するまでの余裕時間である衝突到達時間TTCを算出するとともに、前方障害物との衝突を回避するために必要な衝突回避時間TTB、すなわち、自車と前方障害物とが所定の距離離れた位置で、自車が制動操作によって前方障害物との相対速度を0とするのに必要な時間を算出する。衝突到達時間TTCが衝突回避時間TTBとなったときは衝突を回避するための制動操作を開始する予定のときであるから、衝突回避時間TTBは介入予定タイミングといえる。
【0021】
横方向位置計測手段106は、レーザレーダで構成された距離計測装置101を用いており、距離計測装置101を横方向にスキャンさせて、自車の走行する予定進路における障害物の大きさと位置を計測する。横方向位置計測手段106は、距離計測装置101がミリ波レーダで構成されている場合であれば複数アンテナの出力を用いた開口合成により横方向の情報を再構成するようにしてもよい。また、横方向位置計測手段106は、距離計測装置101を用いないで、障害物の横方向の位置を検出するための手段を新たに設けてもよい。
【0022】
進路余裕度算出手段112は、自車が走行すると推定される推定進路を演算するとともに、横方向位置計測手段106が計測した自車の走行する予定進路にある障害物の大きさと位置に基づいて該障害物の横方向位置が、自車の推定進路内に占める大きさ(幅)を算出する。
【0023】
介入タイミング補正手段104は、進路余裕度算出手段112で算出された該推定進路内に占める前方障害物の大きさによって介入タイミング算出手段103により算出された衝突回避時間TTBに対して介入操作を補正する。すなわち、自車の推定進路幅内に占める前方障害物の大きさが小さい場合には、運転者の操舵操作により短時間で前方障害物をさけることができるので、衝突回避時間TTBを短縮するように補正して衝突回避決定時間TTDを決定する。そして、衝突到達時間TTCが衝突回避決定時間TTDになると、制動操作手段による制動介入を開始する信号を介入手段105に出力する。衝突到達時間TTCが衝突回避決定時間TTDとなったときは衝突を回避するための制動操作を開始するので、衝突回避決定時間TTDは介入開始タイミングといえる。
【0024】
介入手段105は、本実施形態ではブレーキを作動させる制動操作によって衝突を回避する制動操作手段を備えるものであり、介入タイミング補正手段104から制動介入を開始する信号が入力されると、制動操作手段による制動介入を開始する。このようにして、前方障害物との衝突の可能性に応じて該障害物との衝突が回避されるように車両の制動力を制御する。
【0025】
本実施形態では、衝突回避時間TTBを補正することによって障害物回避の容易さに応じて介入開始タイミングを遅らせ、その間に運転者による障害物の回避操作が行われると制動介入を行う必要がなくなるので、不要な介入を減らして運転者への違和感を低減することが可能となる。警報手段110は、制動介入を開始するときやその直前に介入制御が行われること、あるいは、回避するための操作が必要なこと等を運転者に音等により報知するものである。本実施形態では、前方障害物との衝突を回避するのに制動操作によって介入制御を行っているが、操舵操作による介入制御によって前方障害物との衝突を回避するように構成してもよい。
【0026】
次に、前述の進路余裕度算出手段112において、自車が走行する推定進路の推定の仕方(演算)について図2を用いて説明する。図2において、1は自車、2は前方障害物(先行他車)である。自車1は、内界センサとして自車速センサ102、操舵角センサ、ヨーレートセンサが設けられており、自車速度、操舵角及びヨーレートを検出する。したがって、自車速センサ102、操舵角センサ、ヨーレートセンサからの信号に基づいて、自車1の操舵角及び自車速度の情報から幾何学的に自車がこれから通過すると推定される推定進路201を演算する。この推定進路201と横方向位置計測手段106で計測した障害物2の位置と横方向の大きさを進路余裕度算出手段112によって比較することにより、障害物2の横方向位置が自車の推定進路幅201内に占める大きさ(幅)d1を算出することができる。より望ましくは、例えば自車1の走行運動モデルをオブザーバとして用い、操舵角、自車速度に加えてヨーレートや横加速度などの物理量を検出して入力することにより、より精度良く推定進路201を求めることが可能である。
【0027】
さらに、自車の走行する推定進路の別の推定の仕方について図3を用いて説明する。図3は自車1と障害物2の位置関係を上から見た図であり、自車1が走行する道路は路肩の白線3及びセンターライン4により定められている。この道路に路上の位置を特定するための手段としての磁気ネイル301が埋め込まれており、自車1はこの磁気ネイル301の位置を計測して自車の現在の位置(d3)を把握するとともに内界センサからの信号に基づいて自車の走行する推定進路を、センターライン4(又は路肩の白線3)を基準として推定できる。また、障害物の位置もセンターライン4を基準として把握する。この方法によれば、障害物2の横方向位置が自車の推定進路内に占める大きさd1だけでなく、自車1が通過可能な道路の幅d2も求めることができるため、介入予定タイミングを補正してより的確な介入開始タイミングを決定することが可能となる。
【0028】
以上のように、本実施形態では、自車1の走行する予定進路における障害物2の大きさと位置を計測して障害物の横方向位置が自車の推定進路内に占める大きさd1もしくは自車1の通過可能幅d2を確認し、ここでもし障害物の位置が自車の推定進路内を大きく塞いでいないと判定した場合には、介入開始タイミングを当初よりも遅らせるように補正することで回避が容易な場合における不要な介入操作が低減され、運転者への違和感を低減することが可能となる。
【0029】
図4は、図1における横方向位置計測手段106が車両前部に取り付けられたCCDカメラからなる撮像装置で構成されている場合において、自車が走行する推定進路の推定の仕方を説明するためのものであり、撮像装置で撮像した映像を示している。車両前部に取り付けられ撮像装置からは自車1から見た車両前方の映像が進路余裕度算出手段112に出力される。この映像には、前方の障害物2の他に、自車1が走行している道路の路肩の白線3及びセンターライン4、さらに自車1自身の車体の一部が含まれるように、自車1への撮像装置の取り付け位置が選択されている。
【0030】
進路余裕度算出手段112は、この映像に対してエッジ抽出や特徴点抽出(得られたエッジ情報から直線や自動車、人などのパターンを抽出する処理)などの画像処理を施すことにより、風景映像の中から前述の路肩の白線3、センターライン4、自車1の車体等の計測対象を分離することができる。さらに撮像装置の自車1への取り付け位置は既知であるので、内界センサからの信号に基づいて自車の走行する推定進路を、センターライン4(又は路肩の白線3)を基準として推定できる。また、対象物位置は撮像装置の光学系における対象物と撮像素子上の像の対照関係から求められることは周知の事実であり、また、映像中の自車1の幅Lなどは既知の長さであるので、これを利用するとともに前方障害物2までの距離により横方向距離の補正を行い、センターライン4(又は路肩の白線3)を基準とした前方障害物2の位置と大きさを算出する。このようにして、自車の走行する道路の幅や障害物2の横方向位置を自車1に取り付けた装置だけで計測することが可能となり、前方障害物2の横方向の位置が自車の同一車線上に占める大きさd1及びd2が求められることから介入予定タイミングを補正してより的確な介入開始タイミングを決定することが可能となる。
【0031】
以上のように、本実施形態における横方向位置計測手段106では、自車の走行する車線範囲における障害物の大きさと位置を計測するためにビデオカメラなどの撮像装置を使用することで障害物と同時に自車1の走行する道路上の白線、すなわち路肩の車線及びセンターラインなどの位置を計測し、実際の車線範囲に対して障害物がどの程度塞いでいるかをより高精度に判定することが可能である。これにより、障害物の横方向位置が自車の推定車線内に占める大きさd1及び自車1の通過可能幅d2を確認し、ここでもし障害物の位置が自車の推定進路内を大きく塞いでいないと判定した場合には、介入操作タイミングを当初の介入操作よりも遅らせるように補正することで回避が容易な場合における不要な介入操作が低減され、運転者への違和感を低減することが可能となる。
【0032】
次に、図5のフローチャートにより、本発明の衝突回避支援システムにおける制御処理について説明する。まず、ステップ701で、自車速度を読み込むとともに障害物との距離を読み込み、テップ702において、障害物との相対速度を算出し、障害物との距離と相対速度から、そのままの速度で走行を続けたときに前方障害物と衝突するまでの時間である衝突到達時間TTCを算出する。また、ステップ703で、相対速度に基づいて前方障害物との衝突を回避するのに必要な、介入予定タイミングとなる衝突回避時間TTBを算出する。その後ステップ704で、障害物の横方向位置の読み込みを行なう。ステップ705においては、自車の推定進路を演算し、障害物が推定進路内に占める大きさを算出するとともに、障害物が推定進路内に占める大きさに基づいて介入タイミング補正量Dを算出する。ステップ706では、ステップ703で算出した衝突回避時間TTBを介入タイミング補正量Dにより補正して介入開始タイミング(TTB×D)を算出し、これを衝突到達時間TTCと比較することで介入制御を開始するか否かを判定する。もし、衝突到達時間TTCが介入開始タイミング(TTB×D)以下であれば、ステップ707により制動操作または操舵操作による目標介入量の算出及び介入制御を行う。一方、衝突到達時間TTCが介入開始タイミング(TTB×D)に達していなければ、介入制御を行なわずに処理を終える。このような処理手順を制御周期ごとに繰り返すことで車両の衝突回避の支援を行なう。
【0033】
図6、7により、本発明の衝突回避支援システムの他の実施形態を説明する。この実施形態では、図1における介入手段105が、制動操作によって衝突を回避する制動介入手段と操舵操作によって衝突を回避する操舵介入手段等の複数の介入手段を備えている。
【0034】
図6に示すように、制動介入手段による衝突回避可能距離と操舵介入手段による衝突回避可能距離とは障害物との相対速度の違いによって異なる。図6において、線501は操舵操作によって衝突回避するのに必要な操舵回避限界距離を示し、線502は制動操作によって衝突回避するのに必要な制動回避限界距離を示している。すなわち、縦軸の障害物までの距離がこれらの回避限界距離を下回る場合は衝突回避が不可能であることを示している。線502の制動回避限界距離は、車両の減速度が最大、すなわち路面摩擦係数で決まる一定の減速度である場合の限界距離で、相対速度の2乗に比例して増加する。一方、線501の操舵回避限界距離は、操舵により一定速度の横移動が生じると仮定した場合の限界距離であり、相対速度に対して線形に増加する。すなわち、相対速度が値503より遅いときには、操舵操作によって衝突を回避するよりも制動操作によって衝突を回避する方が有利であり、また、相対速度が値503より速いときには、制動操作によるよりも操舵操作による方が有利になる。よって、制動介入手段による介入制御を行うか、操舵介入手段による介入制御を行うか、その介入手段を適切に選択することによって、図6の範囲504のように回避限界距離をより小さくすることが可能である。
【0035】
そこで、図1の介入タイミング補正手段104中に、図7に示すような介入手段選択テーブルを備えておき、どの介入手段を優先して動作させたらよいかを適切に選択する。図7には、障害物に対する相対速度と障害物が自車の推定進路内を塞ぐ大きさの2つのパラメータを用い、相対速度の大小と障害物が自車の推定進路内を塞ぐ大きさの大小により4つの範囲に分け、その範囲で動作させるべき介入手段を示している。障害物が自車の推定進路内を塞ぐ幅が小さく操舵操作することにより回避が容易な場合には、相対速度が大きいときは警報手段110により運転者に回避操作を促すが、相対速度が小さいときは介入制御を行っていない。しかし、どの介入手段を優先して動作させるかの介入手段選択テーブルはこれに限定されるものではない。
【0036】
また、介入タイミング補正手段104は制動介入手段と操舵介入手段との2つの介入制御を同時に行なうようにしてもよく、例えば、相対速度が大きくかつ障害物が自車の推定進路内を塞ぐ幅が大きい場合には制動介入手段によって制動するとともに操舵介入手段によって操舵して衝突を回避する。この場合には、介入手段選択テーブルの範囲によってそれぞれの介入手段による介入操作の割合が異なるようにテーブルを構成してもよい。
【0037】
以上のように本実施形態の介入タイミング補正手段104では、障害物との相対速度と障害物が自車の自車の推定進路内を塞ぐ幅の大きさに基づいて衝突を回避するための介入手段を選択し、介入操作を効果的に行うことが可能となる。
【0038】
図8は、本発明の衝突回避支援システムの他の実施形態を示しており、図1に示す実施形態のものと同じ構成には同じ符号を付している。本実施形態では、図1に示す衝突回避支援システムと比べ、後側方距離測定装置、路面状況推定手段、運転者判別手段及び外部通信手段が追加されている。
【0039】
後側方距離計測装置107は、車両後部に取り付けられたレーザレーダで構成されており、後方障害物との距離を計測するものであり、また、前回計測した測定距離と今回計測した測定距離により自車と前方障害物との相対速度をも測定する。ここで後側方距離計測装置107はレーザレーダに限られず、ミリ波レーダでもよく、ミリ波レーダであれば、後方障害物との距離と相対速度を同時に計測できる。そして、後側方距離計測装置107で計測した後方障害物についての情報は介入タイミング補正手段104に入力され、介入タイミング補正手段104は、隣接車線で後方から追い上げてくる車両等の有無を考慮し、操舵操作による衝突回避を安全に行えるかを判定した上で介入手段の選択を行うので、衝突回避支援システムの安全性を一層増すことができる。
【0040】
路面状況推定手段108は、路面の滑り易さ等の路面状況を把握するものであり、駆動輪である前輪の速度と後輪速度との差に基づいて路面摩擦係数を把握し、この路面状況推定手段108で把握された路面摩擦係数の情報を介入タイミング補正手段104に入力している。また、路面摩擦係数の把握は制動時の車輪変化速度から把握してもよい。そして、路面摩擦係数により図6で示した制動回避限界距離と操舵回避限界距離とが変わることになるので、介入タイミング補正手段104は、路面摩擦係数をも考慮した介入タイミング補正量Dによって衝突回避時間TTBを補正して介入開始タイミング(TTB×D)を算出する。本実施形態では、雨や冬季の凍結、積雪などの路面状況、特に路面の滑り易さを考慮して介入開始タイミングを決定しているので、衝突回避支援システムの安全性を一層増すことができる。
【0041】
運転者判別手段109は、運転者ごとのキーを用意しこのキーを挿入することにより運転者を判別する。車間距離を大きく保ってする運転する運転者によっては介入タイミングが遅延すると却って恐怖感やシステムへの不信感を増大してしまう可能性があるし、逆に普段から車間距離の小さい状態で運転をしている運転者にとっては、介入予定タイミングの遅延補正をしてもなお御節介な介入をするシステムだと感じる可能性がある。そこで、運転者判別手段109で運転者を判別し、判別した運転者の情報を介入タイミング補正手段104に入力し、介入タイミング補正手段104が運転者個別の好みに適応するように運転者に応じた介入タイミング補正をするように制御する。ここで、運転者判別手段109としては、運転者が選択ボタンを押下させる簡便なものでもよいし、運転者を撮影するカメラ、例えば居眠り検知システムのカメラを流用して顔認識データから運転者を特定するもの、ハンドルなどに取り付けた静脈認証システムによって運転者を特定するもの、カーナビやハンズフリーフォンの音声入力による音声認識によって運転者を特定するものなどのいずれであってもよい。
【0042】
以上のように、本実施形態では運転者判別手段109を備え、運転者の運転傾向を考慮して介入予定タイミングの補正を行うことにより、介入制御による運転者への違和感を低減できる。
【0043】
外部通信手段111は、道路側に設けられ基地局と無線等の通信手段によって交信し、他車両等の障害物の情報を入手して介入タイミング算出手段103に入力する。外部通信手段111は、例えば、塀等によって距離計測装置101で検知することのできなかった車両の情報を入手可能である。介入タイミング算出手段103は、距離計測装置101に加え基地局からの情報により自車の予定進路にある障害物を把握することができるので、介入タイミング算出手段103は、障害物を確実に把握して介入予定タイミングを算出することができる。また、外部通信手段111は、本実施形態と同様の衝突回避支援システムを搭載した近隣の他車両と交信してもよいし、道路上に備え付けたセンサやビーコン、カメラなどの情報収集手段によって得られる車両位置情報を収集してもよい。前者の近隣の他車両である場合には、例えば各車両が備えたGPSシステムによる車両位置情報を付加して無線通信手段によって相互に情報を授受したり、同様の衝突回避支援システムを搭載した車両同士で位置情報や加減速、旋回などの行動情報を共有することで、該介入開始タイミングを決定するための障害物の位置情報をより詳細で高精度なものにすることが可能になる。
【0044】
本実施形態の衝突回避支援システムは、後側方距離測定装置107、路面状況推定手段108、運転者判別手段109及び外部通信手段111を備えているが、これらは全て備える必要はなく、適宜必要に応じて前記手段を選択して備えればよく、例えば、後側方距離測定装置107のみを備えてもよい。
【0045】
以上、本発明の実施形態について説明したが、本発明は前記実施形態に限定されるものでなく、特許請求の範囲に記載された発明の精神を逸脱しない範囲で、設計において種々の変更ができるものである。
【図面の簡単な説明】
【0046】
【図1】本発明の衝突回避支援システムの一実施形態を示す全体構成図。
【図2】本発明の衝突回避支援システムにおいて、自車の走行する推定進路の推定方法を説明するための図。
【図3】本発明の衝突回避支援システムにおいて、自車の走行する推定進路の他の推定方法を説明するための図。
【図4】本発明の衝突回避支援システムにおいて、自車の走行する推定進路のさらに他の推定方法を説明するための図。
【図5】本発明の衝突回避支援システムにおける処理のフローチャートを示す図。
【図6】障害物との相対速度による介入手段毎の回避可能距離を示す図。
【図7】本発明の衝突回避支援システムにおける介入タイミング補正手段104の介入手段選択テーブルを示す図。
【図8】本発明の衝突回避支援システムの他の実施形態を示す全体構成図。
【符号の説明】
【0047】
1…自車
2…障害物
3…白線
4…センターライン
101…距離計測装置
102…自車速センサ
103…介入タイミング算出手段
104…介入タイミング補正手段
105…介入手段
106…横方向位置計測手段
107…後側方距離測定装置
108…路面状況推定手段
109…運転者判別手段
110…警報手段
111…外部通信手段111
112…進路余裕度算出手段
201…推定進路
301…磁気ネイル
【特許請求の範囲】
【請求項1】
前方障害物との衝突の可能性に応じて車両の制動操作又は操舵操作もしくは制動操作及び操舵操作によって前方障害物との衝突を回避するように介入制御する衝突回避支援システムにおいて、
前方障害物との距離情報と前方障害物と自車との相対速度情報とから前記介入制御を開始する介入予定タイミングを算出する介入タイミング算出手段と、
自車の走行する予定進路にある前方障害物の横方向の大きさと位置情報から前方障害物が自車の推定進路内を塞ぐ大きさを算出する進路余裕度算出手段と、
前記進路余裕度算出手段で算出した推定進路内を塞ぐ大きさによって前記介入予定タイミングを補正して介入開始タイミングを決定する介入タイミング補正手段を備えることを特徴とする衝突回避支援システム。
【請求項2】
前記介入タイミング算出手段は、車両の前方に取り付けられた距離計測装置で計測した、前方障害物との距離と、自車と前方障害物との相対速度とから前記介入制御を開始する介入予定タイミングを算出し、
前記進路余裕度算出手段は、車両の前方に取り付けられた横方向位置計測手段で計測した、前方障害物の横方向の大きさと位置に基づいて前方障害物が自車の推定進路内を塞ぐ大きさを算出することを特徴とする請求項1記載の衝突回避支援システム。
【請求項3】
前記横方向位置計測手段は車両の前方に取り付けられた撮像装置を備え、前記進路余裕度算出手段は、該撮像装置の画像に基づいて道路上の白線を基準とした前方障害物の位置と大きさを算出するとともに、前記白線を基準とした自車の推定進路を推定し、前方障害物の位置及び大きさと自車の前記推定進路とに基づいて前方障害物が自車の推定進路内を塞ぐ大きさを算出することを特徴とする請求項2記載の衝突回避支援システム。
【請求項4】
前記介入タイミング補正手段は、前記前方障害物が自車の推定進路内を塞ぐ大きさと障害物と自車との相対速度に基づいて制動操作による介入制御か操舵操作による介入制御かを選択することを特徴とする請求項1〜3のいずれかに記載の衝突回避支援システム。
【請求項5】
前記衝突回避支援システムは車両の後部に取り付けられた後側方距離計測装置を備え、前記介入タイミング補正手段は、前記後側方距離計測装置による後側方障害物の位置情報を考慮して、制動操作による介入制御か操舵操作による介入制御かを選択することを特徴とする請求項4に記載の衝突回避支援システム。
【請求項6】
前記衝突回避支援システムは路面情報推定手段を備え、介入タイミング補正手段は、前記路面情報推定手段で推定された路面状況を考慮して前記介入開始タイミングを決定することを特徴とする請求項1〜5のいずれかに記載の衝突回避支援システム。
【請求項7】
前記衝突回避支援システムは運転者を判別する運転者判別手段を備え、前記介入タイミング補正手段は、前記運転者判別手段で判別した運転者情報に基づいて前記介入開始タイミングを決定することを特徴とする請求項1〜6のいずれかに記載の衝突回避支援システム。
【請求項8】
前記衝突回避支援システムは外部からの通信が可能な外部通信手段を備え、前記介入タイミング算出手段は、前記外部通信手段によって得られた障害物の位置及び行動に関する情報を考慮して介入予定タイミングを算出することを特徴とする請求項1〜7のいずれかに記載の衝突回避支援システム。
【請求項9】
請求項1〜8記載の衝突回避支援システムを搭載したことを特徴とする車両。
【請求項1】
前方障害物との衝突の可能性に応じて車両の制動操作又は操舵操作もしくは制動操作及び操舵操作によって前方障害物との衝突を回避するように介入制御する衝突回避支援システムにおいて、
前方障害物との距離情報と前方障害物と自車との相対速度情報とから前記介入制御を開始する介入予定タイミングを算出する介入タイミング算出手段と、
自車の走行する予定進路にある前方障害物の横方向の大きさと位置情報から前方障害物が自車の推定進路内を塞ぐ大きさを算出する進路余裕度算出手段と、
前記進路余裕度算出手段で算出した推定進路内を塞ぐ大きさによって前記介入予定タイミングを補正して介入開始タイミングを決定する介入タイミング補正手段を備えることを特徴とする衝突回避支援システム。
【請求項2】
前記介入タイミング算出手段は、車両の前方に取り付けられた距離計測装置で計測した、前方障害物との距離と、自車と前方障害物との相対速度とから前記介入制御を開始する介入予定タイミングを算出し、
前記進路余裕度算出手段は、車両の前方に取り付けられた横方向位置計測手段で計測した、前方障害物の横方向の大きさと位置に基づいて前方障害物が自車の推定進路内を塞ぐ大きさを算出することを特徴とする請求項1記載の衝突回避支援システム。
【請求項3】
前記横方向位置計測手段は車両の前方に取り付けられた撮像装置を備え、前記進路余裕度算出手段は、該撮像装置の画像に基づいて道路上の白線を基準とした前方障害物の位置と大きさを算出するとともに、前記白線を基準とした自車の推定進路を推定し、前方障害物の位置及び大きさと自車の前記推定進路とに基づいて前方障害物が自車の推定進路内を塞ぐ大きさを算出することを特徴とする請求項2記載の衝突回避支援システム。
【請求項4】
前記介入タイミング補正手段は、前記前方障害物が自車の推定進路内を塞ぐ大きさと障害物と自車との相対速度に基づいて制動操作による介入制御か操舵操作による介入制御かを選択することを特徴とする請求項1〜3のいずれかに記載の衝突回避支援システム。
【請求項5】
前記衝突回避支援システムは車両の後部に取り付けられた後側方距離計測装置を備え、前記介入タイミング補正手段は、前記後側方距離計測装置による後側方障害物の位置情報を考慮して、制動操作による介入制御か操舵操作による介入制御かを選択することを特徴とする請求項4に記載の衝突回避支援システム。
【請求項6】
前記衝突回避支援システムは路面情報推定手段を備え、介入タイミング補正手段は、前記路面情報推定手段で推定された路面状況を考慮して前記介入開始タイミングを決定することを特徴とする請求項1〜5のいずれかに記載の衝突回避支援システム。
【請求項7】
前記衝突回避支援システムは運転者を判別する運転者判別手段を備え、前記介入タイミング補正手段は、前記運転者判別手段で判別した運転者情報に基づいて前記介入開始タイミングを決定することを特徴とする請求項1〜6のいずれかに記載の衝突回避支援システム。
【請求項8】
前記衝突回避支援システムは外部からの通信が可能な外部通信手段を備え、前記介入タイミング算出手段は、前記外部通信手段によって得られた障害物の位置及び行動に関する情報を考慮して介入予定タイミングを算出することを特徴とする請求項1〜7のいずれかに記載の衝突回避支援システム。
【請求項9】
請求項1〜8記載の衝突回避支援システムを搭載したことを特徴とする車両。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2008−132867(P2008−132867A)
【公開日】平成20年6月12日(2008.6.12)
【国際特許分類】
【出願番号】特願2006−320439(P2006−320439)
【出願日】平成18年11月28日(2006.11.28)
【出願人】(000005108)株式会社日立製作所 (27,607)
【Fターム(参考)】
【公開日】平成20年6月12日(2008.6.12)
【国際特許分類】
【出願日】平成18年11月28日(2006.11.28)
【出願人】(000005108)株式会社日立製作所 (27,607)
【Fターム(参考)】
[ Back to top ]