
衝突回避通知システム
【課題】車両の周辺を監視し、歩行者と移動体とが衝突する可能性があるときに、歩行者および移動体に衝突回避メッセージを通知する。
【解決手段】歩行者検出手段11が車両10の周辺の歩行者を検出し、歩行者予測進路演算部12が歩行者1の予測進路を演算する。移動体検出手段13が車両10の周辺の移動体を検出し、移動体予測進路演算部14が移動体の予測進路を演算する。衝突予測演算部15が歩行者1の予測進路と移動体の予測進路とに基づいて歩行者と移動体との衝突可能性を演算し、衝突回避メッセージ通知手段16が、衝突可能性がある場合に移動体に対して衝突回避メッセージを通知する。
【解決手段】歩行者検出手段11が車両10の周辺の歩行者を検出し、歩行者予測進路演算部12が歩行者1の予測進路を演算する。移動体検出手段13が車両10の周辺の移動体を検出し、移動体予測進路演算部14が移動体の予測進路を演算する。衝突予測演算部15が歩行者1の予測進路と移動体の予測進路とに基づいて歩行者と移動体との衝突可能性を演算し、衝突回避メッセージ通知手段16が、衝突可能性がある場合に移動体に対して衝突回避メッセージを通知する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は衝突回避通知システムに関し、詳しくは車両外にいる歩行者が移動体と衝突するおそれがあるときに通知を行なう衝突回避通知システムに関する。
【背景技術】
【0002】
従来の技術として、交差点に異なる方向から接近する複数の車両の衝突を防止するようにした衝突防止装置が知られている(例えば、特許文献1参照)。
【特許文献1】特開平5−325099号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
しかし、従来の衝突防止装置は、車両と車両との衝突を防止するようにしただけのものであり、車両外にいる歩行者と他の車両との衝突を防止する手段は備えられていなかった。このため、走行中の車両が認識できない歩行者、もしくは歩行者が視界に入っていない走行中の車両を事前に知ることはできないので、その存在に気づくまで衝突回避行動をとることができず、歩行者と車両とは衝突する可能性があった。例えば、車両の利用者(所有者,使用者等)である歩行者が道路を横断して道路の反対車線に駐車した自車両に戻ろうとした場合等に、歩行者の道路横断位置に進入しようとする他の車両に気づかず、衝突が発生する可能性がある。特に、道路がカーブしており、歩行者が横断しようとする道路部分が他の車両を運転する運転者の視界から外れている場合、衝突事故が発生する確率が高くなる。
【0004】
従来、このような衝突事故が発生した場合、他の車両の運転者の前方不注意であるとみなされるケースが多かったが、車両の利用者である歩行者が道路を横断して道路の反対車線に駐車した自車両に戻ろうとするようなときには、自車両が事前に歩行者および他の車両を検知して、歩行者および/または他の車両に通知できれば、衝突事故を未然に回避できる可能性がある。
【0005】
ところが、上述した従来の技術では、車両の利用者である歩行者が道路を横断して道路の反対車線に駐車した自車両に戻ろうとするような場合等の衝突が発生する可能性が高いときに、歩行者および他の車両を検知して、当該歩行者および/または他の車両の運転者に通知するような手段は存在していないという問題点があった。
【0006】
そこで、本発明の課題は、車両周辺の歩行者が移動体(自動車,オートバイ,自転車等の車両を含む移動する物体の総称)との衝突することを避けるために、歩行者および/または移動体に対して衝突回避メッセージを通知することにより、歩行者および/または移動体に衝突回避行動をとらせることができるようにした衝突回避通知システムを提供することにある。
【課題を解決するための手段および発明の効果】
【0007】
請求項1記載の衝突回避通知システムは、車両周辺の歩行者を検出する歩行者検出手段と、前記歩行者検出手段により検出された歩行者の予測進路を演算する歩行者予測進路演算部と、車両周辺の移動体を検出する移動体検出手段と、前記移動体検出手段により検出された移動体の予測進路を演算する移動体予測進路演算部と、前記歩行者予測進路演算部により演算された歩行者の予測進路と前記移動体予測進路演算部により演算された移動体の予測進路とに基づいて歩行者と移動体との衝突可能性を演算する衝突予測演算部と、前記衝突予測演算部により衝突可能性があると演算された場合に前記歩行者および/または前記移動体に対して衝突回避メッセージを通知する回避行動通知手段とを備えることを特徴とする。請求項1記載の衝突回避通知システムによれば、歩行者と移動体とが衝突する可能性がある場合に衝突回避メッセージが歩行者および/または移動体に通知されるので、歩行者は横断しようとする道路部分に移動体が進入してくることを事前に知って衝突回避行動をとることができ、移動体は進行先の道路部分を歩行者が横断することを事前に知って衝突回避行動をとることができるという効果がある。よって、衝突事故を未然に防止することができる。
【0008】
請求項2記載の衝突回避通知システムは、請求項1記載の衝突回避通知システムにおいて、前記歩行者検出手段が、車載カメラから映像を入力し、画像の変化があれば、その変化箇所の画像を解析して歩行者であるかどうかを検出し、歩行者であれば該歩行者の位置を検出することを特徴とする。請求項2記載の衝突回避通知システムによれば、車載カメラから入力された映像を画像解析処理することにより歩行者の位置を検出するようにしたので、歩行者に何らの前提を必要とすることなしに歩行者の位置を検出することができ、汎用性が高い。特に、歩行者を登録利用者に限定しなければ、自車両とは直接関係のない歩行者に対しても、衝突回避行動をとるように衝突回避メッセージを通知することができる。
【0009】
請求項3記載の衝突回避通知システムは、請求項1記載の衝突回避通知システムにおいて、前記歩行者検出手段が、車載カメラから映像を入力し、画像の変化があれば、その変化箇所の画像を解析して歩行者であるかどうかを検出し、歩行者であれば該歩行者が登録利用者であるかどうかを判断し、該歩行者が登録利用者であれば該歩行者の位置を検出することを特徴とする。請求項3記載の衝突回避通知システムによれば、車載カメラから入力された映像を画像解析処理することにより歩行者が登録利用者であるかどうかを検出し、登録利用者である歩行者の位置を検出するようにしたので、車両と特定の関係がある歩行者の位置だけを検出することができる。このため、車両の登録利用者が車外にいるときにも、車両が登録利用者の安全性を高めることができる。
【0010】
請求項4記載の衝突回避通知システムは、請求項1記載の衝突回避通知システムにおいて、前記歩行者検出手段が、前記歩行者の所持する携帯電話機が発する待ち受け電波を走査し、待ち受け電波があれば、該歩行者の位置を検出することを特徴とする。請求項4記載の衝突回避通知システムによれば、携帯電話機が発する待ち受け電波に基づいて歩行者の位置を検出するようにしたので、画像解析処理に基づいて歩行者の位置を検出する場合に比べて、衝突回避通知処理の負荷を軽減することができる。携帯電話機の普及率の向上に伴って比較的容易に歩行者の位置検出を可能にする。
【0011】
請求項5記載の衝突回避通知システムは、請求項1記載の衝突回避通知システムにおいて、前記歩行者検出手段が、前記歩行者の所持する電子キーを認識し、該電子キーの登録IDが前記車両の登録IDと一致する場合に、複数の発信器による発信制御を行い、反応時間の差により歩行者の位置を検出することを特徴とする。請求項5記載の衝突回避通知システムによれば、歩行者の所持する電子キーを認識するようにしたことにより、画像解析処理に基づいて歩行者の位置を検出する場合に比べて、衝突回避通知処理の負荷を軽減することができる。また、電子キーは限定された利用者だけが所持するものであるので、携帯電話機が発する待ち受け電波に基づいて歩行者の位置を検出する場合に比べて、歩行者が登録利用者であるか否かの判定を容易に行なうことができる。
【0012】
請求項6記載の衝突回避通知システムは、請求項1ないし請求項5のいずれかに記載の衝突回避通知システムにおいて、前記歩行者予測進路演算部が、前記歩行者の複数の時刻における位置データに基づいて移動速度および移動方向を求め、歩行者の予測進路を演算することを特徴とする。請求項6記載の衝突回避通知システムによれば、歩行者の複数の時刻における位置データに基づいて移動速度および移動方向を求めるようにしたので、歩行者の予測進路の演算を容易に実行することができる。
【0013】
請求項7記載の衝突回避通知システムは、請求項1記載の衝突回避通知システムにおいて、前記移動体検出手段が、車載カメラから映像を入力し、画像の変化を検出して移動体であるかどうかを検出し、移動体であれば該移動体の位置を検出することを特徴とする。請求項7記載の衝突回避通知システムによれば、車載カメラから入力された映像を画像解析処理することにより移動体の位置を検出するようにしたので、移動体に何らの前提を必要とすることなしに移動体の位置を検出することができ、汎用性が高い。
【0014】
請求項8記載の衝突回避通知システムは、請求項1記載の衝突回避通知システムにおいて、前記移動体検出手段が、車載カメラから映像を入力し、画像の変化を検出して移動体であるかどうかを検出し、移動体であれば該移動体が装備しているGPSのデータを情報センタから得て該移動体の位置を検出することを特徴とする。請求項8記載の衝突回避通知システムによれば、移動体が装備しているGPSのデータを情報センタにて蓄積して該データを利用することにより移動体の位置を検出するようにしたので、画像解析処理に基づいて移動体の位置を検出する場合に比べて、衝突回避通知処理の負荷を軽減することができる。
【0015】
請求項9記載の衝突回避通知システムは、請求項1記載の衝突回避通知システムにおいて、前記移動体検出手段が、車車間通信を使用して移動体の位置を検出することを特徴とする。請求項9記載の衝突回避通知システムによれば、車車間通信を使用して移動体の位置を検出することにより、移動体の位置を素早く検出することができる。
【0016】
請求項10記載の衝突回避通知システムは、請求項1または請求項7ないし請求項9のいずれかに記載の衝突回避通知システムにおいて、前記移動体予測進路演算部が、前記移動体の複数の時刻における位置データに基づいて移動速度および移動方向を求め、移動体の予測進路を演算することを特徴とする。請求項10記載の衝突回避通知システムによれば、移動体の複数の時刻における位置データに基づいて移動速度および移動方向を求めるようにしたので、移動体の予測進路の演算を容易に実行することができる。
【0017】
請求項11記載の衝突回避通知システムは、請求項1ないし請求項10のいずれかに記載の衝突回避通知システムにおいて、前記回避行動通知手段が、車載装備を利用して前記歩行者および/または前記移動体に衝突回避メッセージを通知することを特徴とする。請求項11記載の衝突回避通知システムによれば、ホーン,ヘッドランプ,ハザードランプなどの車載装備を利用して歩行者および/または移動体に衝突回避メッセージを通知するようにしたので、比較的簡単に衝突回避メッセージを通知することができる。
【0018】
請求項12記載の衝突回避通知システムは、請求項1ないし請求項10のいずれかに記載の衝突回避通知システムにおいて、前記回避行動通知手段が、車外設備に対して制御信号を送信して前記歩行者および/または前記移動体に衝突回避メッセージを通知することを特徴とする。請求項12記載の衝突回避通知システムによれば、街灯,電光掲示板などの車外設備に対して制御信号を送信して歩行者および/または移動体に衝突回避メッセージを通知するようにしたので、衝突回避メッセージの通知を大規模に行なうことができ、歩行者および/または移動体が気付きやすいという利点がある。
【0019】
請求項13記載の衝突回避通知システムは、請求項1ないし請求項10のいずれかに記載の衝突回避通知システムにおいて、前記回避行動通知手段が、車車間通信により前記移動体の装備を利用して衝突回避メッセージを通知することを特徴とする。請求項13記載の衝突回避通知システムによれば、車車間通信(直接通信、車外通信網を利用した間接通信)により、ディスプレイ,ハザードランプなどの移動体の装備を利用して衝突回避メッセージを通知するようにしたので、移動体の運転者に衝突回避行動をとるように直接的に伝達することができる。
【発明を実施するための最良の形態】
【0020】
車両周辺の歩行者を監視し、歩行者と移動体である他の車両と衝突するおそれがある場合には、歩行者および/または移動体に衝突回避メッセージを通知することにより、歩行者および/または移動体が衝突回避行動をとれるようにした。
【0021】
以下、本発明の実施例について図面を参照しながら詳細に説明する。
【実施例1】
【0022】
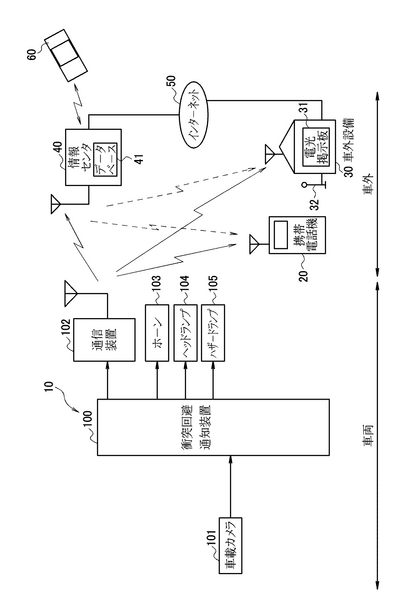
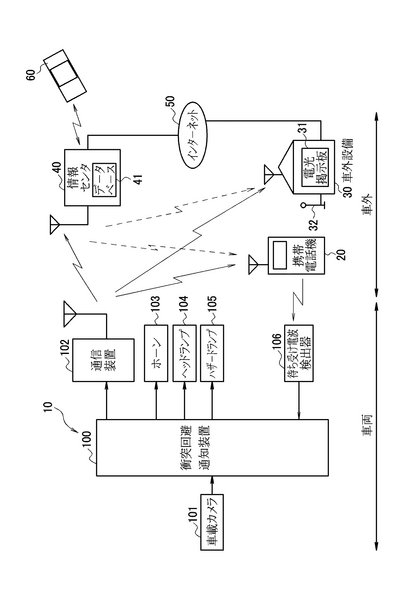
図1は、本発明の実施例1に係る衝突回避通知システムの構成を示すブロック図である。本実施例1に係る衝突回避通知システムは、衝突回避通知装置100が搭載された車両10と、歩行者1(図3参照)が所持する携帯電話機20と、車両10の周辺にある車外設備30と、車両10を無線通信網を介して管理する情報センタ40と、車外設備30と情報センタ40とを接続するインターネット50と、移動体である他の車両60とから、その主要部が構成されている。
【0023】
衝突回避通知装置100は、車両10の車載カメラ101,通信装置102,ホーン103,ヘッドランプ104,およびハザードランプ105に接続されている。衝突回避通知装置100は、車載カメラ101から入力された映像に基づいて歩行者1と移動体である他の車両60との衝突可能性を判定するとともに、判定結果に基づいて通信装置102を用いて、情報センタ40を経由して、あるいはVICS(Vehicle Information and Communication System),ETC(Electronic Toll Collection)等の車外通信網を利用して、歩行者1が所持する携帯電話機20および/または車外設備30の電光掲示板31および/または街灯32等に、たとえば、「他の車両が接近してきていますので、歩道に戻ってください。」等の衝突回避行動を知らせる衝突回避メッセージを通知する。また、衝突回避通知装置100は、移動体である他の車両60には、情報センタ40を経由して、あるいは車車間通信(赤外線通信,レーダー通信等の直接通信,VICS,ETC等の車外通信網を利用した間接通信)を通じて、たとえば、「前方に歩行者がいますので、ブレーキを踏んでください。」等の衝突回避行動を知らせる衝突回避メッセージを通知する。
【0024】
車載カメラ101は、動画撮影が可能なカメラであり、1個もしくは複数の車載カメラ101により車両10の周辺にいる歩行者1および車両10の前方あるいは後方にいる移動体である他の車両60を追尾可能に撮影する。
【0025】
通信装置102は、携帯電話機でもよく、また携帯電話機を使用しない専用の車載データ通信モジュール(Data Communication Module:DCM)を使用するものであってもよい。通信装置102は、衝突回避通知装置100で作成された衝突回避メッセージを、情報センタ40を経由して、あるいは情報センタ40を経由することなしに、携帯電話機20および/または車外設備30に送信する。
【0026】
ホーン103は、円形の金属版に取り付けた共鳴板を、電磁石に心棒を入れたアマチュアで震わせて音を発する電気式の装置である。
【0027】
ヘッドランプ104は、走行ビーム用光源とすれ違いビーム用光源とを有し、両ビームが単一の灯体と前面ガラスとで得られるようにした前照灯である。
【0028】
ハザードランプ105は、方向指示ランプ等を一斉に点滅させる装置である。
【0029】
携帯電話機20は、その電話番号,メールアドレス等が衝突回避通知装置100および情報センタ40のデータベース41に予め登録されている。なお、携帯電話機20には、PHS(Personal Handyphon System),ページャ等の全ての携帯情報通信機器が含まれているものとする。
【0030】
車外設備30は、道路沿いのビルディング,街灯群,信号機等をいい、電光掲示板31および/または街灯32を備える。
【0031】
情報センタ40は、車両10の管理や情報提供を行なう通信センタであり、データベース41を含んで構成されている。情報センタ40は、車両10から送信されてきた衝突回避メッセージを受信すると、衝突回避メッセージを携帯電話機20および/または車外設備30に転送する。
【0032】
インターネット50は、情報センタ40と車外設備30との間を接続している有線通信網である。
【0033】
移動体である他の車両60は、情報センタ40を経由して、あるいは情報センタ40を経由することなしに、車車間通信(直接通信、車外通信網を利用した間接通信)を通じて、衝突回避通知装置100と通信することが可能である。
【0034】
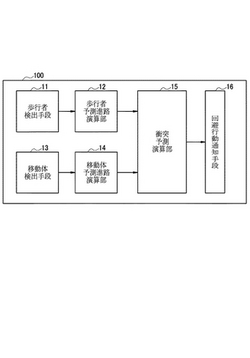
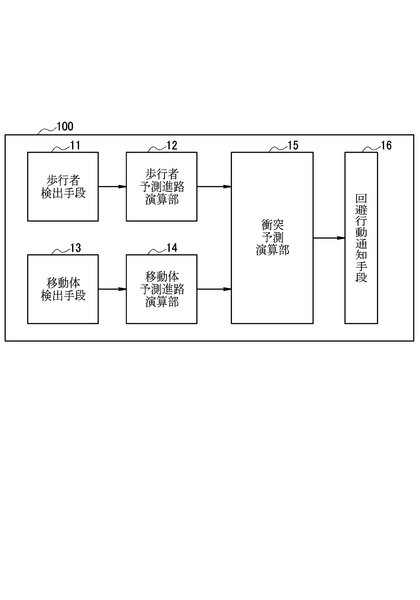
図2は、衝突回避通知装置100の構成を示すブロック図である。この衝突回避通知装置100は、車両10の周辺にいる歩行者1の位置を検出する歩行者検出手段11と、歩行者検出手段11により検出された歩行者1の予測進路を演算する歩行者予測進路演算部12と、車両10の周辺にいる移動体である他の車両60を検出する移動体検出手段13と、移動体検出手段13により検出された移動体である他の車両60の予測進路を演算する移動体予測進路演算部14と、歩行者予測進路演算部12により演算された歩行者1の予測進路と移動体予測進路演算部14により演算された移動体である他の車両60の予測進路とに基づいて歩行者1と移動体である他の車両60との衝突可能性を演算する衝突予測演算部15と、衝突予測演算部15により衝突可能性があると演算された場合に、歩行者1および移動体である他の車両60に対して衝突回避メッセージを通知する回避行動通知手段16とで構成される。
【0035】
歩行者検出手段11は、車載カメラ101を利用して歩行者1の位置を検出する手段である。具体的には、歩行者検出手段11は、車載カメラ101から映像を入力し、画像の変化を検出し、画像の変化があれば、その変化箇所の画像を解析し、歩行者1であるかどうかを検出し、歩行者1であれば、画像を解析して、歩行者1が登録利用者であるかどうかを判断し、歩行者1が登録利用者であれば、画像を解析し、歩行者1の位置を検出する。
【0036】
歩行者予測進路演算部12は、歩行者1の複数の時刻における位置データに基づいて移動速度および移動方向を求め、歩行者1の予測進路を演算する。
【0037】
移動体検出手段13は、車載カメラ101を利用して移動体である他の車両60の位置を検出する。具体的には、移動体検出手段13は、車載カメラ101から映像を入力し、画像の変化を検出し、画像の変化があれば、その変化箇所の画像を解析し、移動体である他の車両60であるかどうかを検出し、移動体である他の車両60であれば、画像を解析し、移動体である他の車両60の位置を検出する。また、移動体検出手段13は、移動体である他の車両60が搭載しているGPSによる位置データ(GPSデータ)を情報センタ40にて蓄積し、そのGPSデータを利用して移動体である他の車両60の位置を検出するようにしてもよい。
【0038】
移動体予測進路演算部14は、移動体である他の車両60の複数の時刻における位置データに基づいて移動速度および移動方向を求め、移動体である他の車両60の予測進路を演算する。
【0039】
衝突予測演算部15は、歩行者予測進路演算部12により演算された歩行者1の予測進路と、移動体予測進路演算部14により演算された移動体である他の車両60の予測進路とに基づいて、歩行者1と移動体である他の車両60との衝突可能性を演算する。
【0040】
回避行動通知手段16は、ホーン103,ヘッドランプ104,ハザードランプ105などの車載装備を利用して歩行者1および/または移動体である他の車両60に衝突回避メッセージを通知したり、電光掲示板31,街灯32などの車外設備30に対して制御信号を送信して歩行者1および/または移動体である他の車両60に衝突回避メッセージを通知したり、車車間通信(直接通信、車外通信網を利用した間接通信)を利用して歩行者1および/または移動体である他の車両60に衝突回避メッセージを通知したり、ディスプレイ,ハザードランプなどの移動体である他の車両60の装備を利用して衝突回避メッセージを通知したりする。
【0041】
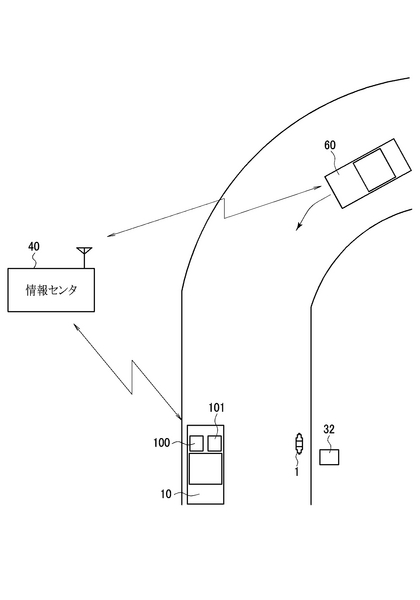
図3は、衝突回避通知装置100の使用状況の一例を説明する図である。ここでは、車両の利用者(所有者,使用者等)である歩行者1が道路を横断して道路の反対車線に駐車した自車両10に戻ろうとしたときに、カーブした道路の右手側から移動体である他の車両60が歩行者1の道路横断位置に進入してきた例を示している。衝突回避通知装置100は、歩行者検出手段11により、車載カメラ101からの映像を解析し、歩行者1が自車両10に向かって道路を横断して近づいてくることを検出する。これと同時に、衝突回避通知装置100は、情報センタ40からのGPSデータを受信することにより、移動体である他の車両60が道路上を歩行者1が横断する地点に向けて走行していることを検出する。そして、衝突回避通知装置100は、歩行者1の予測進路と移動体である他の車両60の予測進路とが、同一時刻に同一場所で交差するかどうかに基づいて衝突可能性の有無を判断し、衝突可能性があれば、情報センタ40を通じて走行する他の車両60に衝突回避メッセージを通知する。他の車両60は、車両装備のカーナビゲーション装置,ハザードランプ等に衝突回避メッセージを表示し、運転者にブレーキを踏む等の衝突回避行為をとらせる。また、衝突回避通知装置100は、車外設備30の街灯32に衝突回避メッセージを通知し、街灯32を点滅させる、街灯32の発光色を変える、街灯32によって歩行者1のいる位置だけに光を照射する等の衝突回避表示を行ない、歩行者1に歩道まで引き返す等の衝突回避行為をとらせる。
【0042】
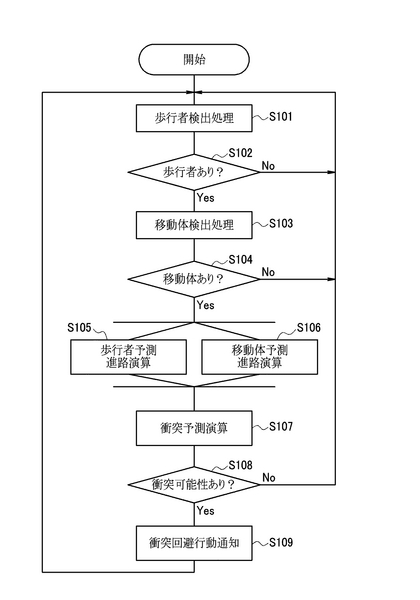
図4は、衝突回避通知装置100の動作を示すフローチャートである。
【0043】
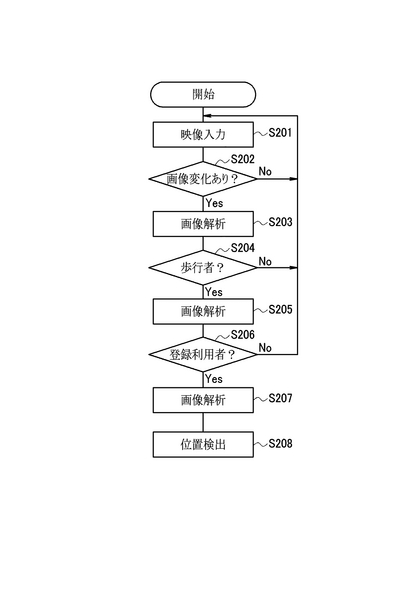
図5は、図4中の歩行者検出処理をさらに詳細に示すフローチャートである。
【0044】
次に、このように構成された実施例1に係る衝突回避通知システムの動作について、図1ないし図5を参照しながら説明する。
【0045】
衝突回避通知装置100は、歩行者検出手段11を連続的もしくは間欠的に作動させることにより、車載カメラ101の映像に基づいて車両10の周辺にいる歩行者1の位置を検出する(ステップS101)。
【0046】
詳しくは、歩行者検出手段11は、車載カメラ101から映像を入力し(ステップS201)、画像の変化を検出する(ステップS202)。画像の変化があれば、歩行者検出手段11は、その変化箇所の画像を解析し(ステップS203)、歩行者1であるかどうかを検出する(ステップS204)。歩行者1であれば、歩行者検出手段11は、さらに画像を解析して(ステップS205)、その歩行者1が車両10に予め登録されている登録利用者(所有者,使用者等)であるかどうかを判断する(ステップS206)。登録利用者であるかどうかの判断は、車載カメラ101で撮影した画像を画像処理して人物を抽出し、この人物の行動パターンを、既に登録されている登録利用者の行動パターンと照らし合わせ、一致した場合に当該人物が登録利用者であると判定する。例えば、車載カメラ101で撮影した画像を入力とし、統計機械学習アルゴリズムを利用して、背景部分の除去処理,機械学習による対象動物体(人物)の認識・検出処理,動き補償,対象動物体の追跡処理,ハイライト行動パターンの判断処理(イベント抽出)を行なう。また、登録利用者として衝突回避通知装置100に予め登録された顔,虹彩などのバイオメトリクス情報の一致によって、登録利用者であると判断してもよい。歩行者1が登録利用者であれば、歩行者検出手段11は、さらに画像を解析し(ステップS207)、歩行者1の位置を検出(特定)する(ステップS208)。なお、不特定多数の歩行者1の位置を検出する場合は、歩行者検出手段11は、歩行者1が登録利用者であるかどうかの判断(ステップS206)を行わずに、位置検出を行なうことができる。また、車載カメラ101が赤外線カメラであり、車両10がナイトビジョン(夜間視野補助機能)を備える場合には、この機能を利用して歩行者1の位置を検出することができる。
【0047】
歩行者検出手段11により車両10の周辺にいる歩行者1が検出されたときには(ステップS102でイエス)、衝突回避通知装置100は、移動体検出手段13を作動させることにより、歩行者1の周辺に移動体である他の車両60が存在するかどうかを検出する(ステップS103)。
【0048】
詳しくは、移動体検出手段13は、歩行者検出手段11と同様に、車載カメラ101から映像を入力し、画像の変化を検出し、画像の変化があれば、その変化箇所の画像を解析し、移動体である他の車両60であるかどうかを検出し、移動体である他の車両60であれば、画像を解析して、移動体である他の車両60の位置を検出する。なお、車載カメラ101が赤外線カメラであり、車両10がナイトビジョン(夜間視野補助機能)を備える場合には、この機能を利用して移動体である他の車両60の位置を検出することができる。
【0049】
また、移動体検出手段13は、車載カメラ101から映像を入力し、画像の変化を検出し、画像の変化があれば、その変化箇所の画像を解析し、移動体である他の車両60であるかどうかを検出し、移動体である他の車両60であれば、移動体である他の車両60の所持しているGPS(Global Positioning System)のデータ(GPSデータ)を情報センタ40のデータベース41にて蓄積して、そのGPSデータを利用することにより、他の車両60の位置を検出する。
【0050】
移動体検出手段13により歩行者1の周辺に移動体である他の車両60が存在すると判定された場合(ステップS104でイエス)、衝突回避通知装置100は、歩行者予測進路演算部12により歩行者1の予測進路を演算する(ステップS105)。詳しくは、歩行者予測進路演算部12は、歩行者1の複数の時刻における位置データに基づいて歩行者1の移動速度および移動方向を求め、歩行者1の予測進路を演算する。
【0051】
また、衝突回避通知装置100は、移動体予測進路演算部14により、移動体である他の車両60の予測進路を演算する(ステップS106)。詳しくは、移動体予測進路演算部14は、移動体である他の車両60の複数の時刻における位置データに基づいて他の車両60の移動速度および移動方向を求め、他の車両60の予測進路を演算する。
【0052】
次に、衝突回避通知装置100は、衝突予測演算部15により、歩行者1の予測進路と移動体である他の車両60の予測進路とに基づいて、歩行者1と他の車両60とが同時刻に同一地点に存在するかどうかを演算し、同時刻に同一地点に存在する可能性があれば、歩行者1と他の車両60とが衝突する可能性(衝突可能性)があると判定する(ステップS108)。
【0053】
衝突可能性があると判定された場合は、衝突回避通知装置100は、回避行動通知手段16により、衝突回避メッセージを歩行者1および/または移動体である他の車両60に通知する(ステップS109)。
【0054】
詳しくは、回避行動通知手段16は、自車両10のホーン103を鳴動させたり、ヘッドランプ104やハザードランプ105を点滅させたりすることにより注意を喚起して、歩行者1および/または移動体である他の車両60に衝突回避メッセージを伝達し、衝突回避行為を行なうように促す。
【0055】
また、回避行動通知手段16は、自車両10の装備を用いた衝突回避メッセージの通知に加えて、衝突回避メッセージを、情報センタ40を経由して、あるいは情報センタ40を経由することなしに、歩行者1の携帯電話機20に送信する。これにより、歩行者1は、携帯電話機20の着信光,着信音,着信バイブレーションにより、視覚,聴覚,触覚を通じて注意を喚起される。さらに、電話を受けて衝突回避メッセージを聞くまたは見ることによって、移動体である他の車両60が迫ってきていることを知り、移動体である他の車両60を避けることになる。また、回避行動通知手段16は、衝突回避メッセージを、情報センタ40を経由して、あるいは情報センタ40を経由することなしに、車外設備30に送信する。すると、車外設備30は、衝突回避メッセージを電光掲示板31に表示するとともに音声で読み上げる。また、車外設備30は、街灯32を点滅させたり、街灯32の発光色を変えたり、街灯32により歩行者1のいる位置だけをスポットライト的に照射したりする。これにより、歩行者1は、電光掲示板31や街灯32の光量変化や音声によって視覚,聴覚を通じて注意を喚起され、衝突回避メッセージを見るまたは聞くことによって、移動体である他の車両60が迫ってきていることを知り、他の車両60を避ける等の衝突回避行動をとることができる。
【0056】
一方、回避行動通知手段16は、衝突回避メッセージを、情報センタ40を経由して、移動体である他の車両60に送信する。これにより、他の車両60の運転者は、所持する携帯電話機や通信機能を有するカーナビゲーション装置等で衝突回避メッセージを受信して、ハザードランプの点滅,カーナビゲーション装置からの音声,シートバイブレータの振動等により視覚,聴覚,触覚を通じて注意を喚起され、衝突回避メッセージを見たり、聞いたり、感じたりすることによって、歩行者1が目前にいることを知り、歩行者1を避ける等の衝突回避行動をとることができる。なお、車両10と他の車両60との間で、車車間通信機能(直接通信機能)が使用できれば、衝突回避メッセージを、情報センタ40を経由することなしに、他の車両60に直接送信するようにしてもよい。さらに、車両10および他の車両60と車外設備30との間で、光ビーコン,VICS(Vehicle Information and Communication System),ETC(Electronic Toll Collection)等を経由して路車間通信機能が使用できれば、衝突回避メッセージを、情報センタ40を経由することなしに、路車間通信により他の車両60に間接的に送信するようにしてもよい。
【0057】
このように、実施例1に係る衝突回避通知システムによれば、車両10の周辺の歩行者1を監視して、歩行者1と移動体である他の車両60とが衝突するおそれがある場合には、歩行者1および/または移動体である他の車両60に対して衝突回避メッセージを通知するようにしたので、歩行者1および/または移動体である他の車両60は衝突回避行動をとることが可能になり、衝突事故を未然に防止することができる。
【実施例2】
【0058】
図6は、本発明の実施例2に係る衝突回避通知システムの構成を示すブロック図である。本実施例2に係る衝突回避通知システムは、衝突回避通知装置100が搭載された車両10と、歩行者1(図3参照)が所持する携帯電話機20と、車両10の周辺にある車外設備30と、車両10を無線通信網を介して管理する情報センタ40と、車外設備30と情報センタ40とを接続するインターネット50と、移動体である他の車両60とから、その主要部が構成されている。
【0059】
衝突回避通知装置100は、車両10の車載カメラ101,通信装置102,ホーン103,ヘッドランプ104,ハザードランプ105,および待ち受け電波検出器106に接続されている。
【0060】
待ち受け電波検出器106は、携帯電話機20が基地局(図示せず)との間のコネクションをとるために発信する待ち受け電波を検出する装置である。
【0061】
なお、その他の特に言及しない部分は、図1ないし図5に示した実施例1に係る衝突回避通知システムの対応する部分と同様に構成されているので、対応する部分には同一符号を付して、これらの詳しい説明を省略する。
【0062】
ただし、歩行者検出手段11は、待ち受け電波検出器106を用いて携帯電話機20の待ち受け電波を走査することにより、歩行者1の位置を検出する手段である。
【0063】
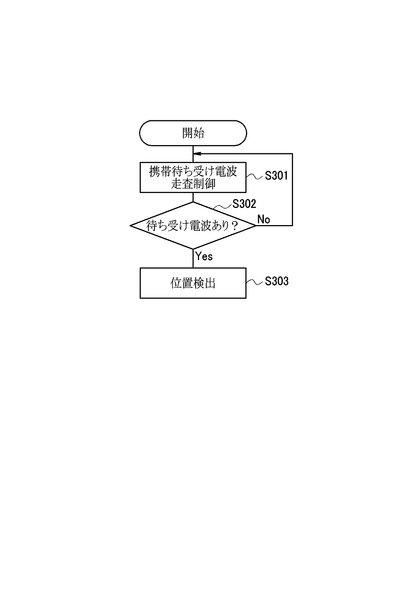
図7は、歩行者検出手段11による歩行者検出処理の詳細を示すフローチャートである。
【0064】
次に、このように構成された実施例2に係る衝突回避通知システムの動作について、実施例1に係る衝突回避通知システムの動作との相違点を中心に説明する。
【0065】
衝突回避通知装置100は、歩行者検出手段11を連続的もしくは間欠的に作動させることにより、歩行者1の所持する携帯電話機20の待ち受け電波を検知して車両10の周辺にいる歩行者1の位置を検出する(ステップS101)。
【0066】
詳しくは、歩行者検出手段11は、待ち受け電波検出器106により携帯電話機20が発する待ち受け電波を走査し(ステップS301)、待ち受け電波があれば(ステップS302でイエス)、携帯電話機20を所持する歩行者1の位置を検出する(ステップS303)。
【0067】
また、歩行者1が車両10の周辺にいない場合、携帯電話機20に内蔵されているGPSから位置データを無線通信網等を介して取得して、歩行者1の位置データと自車両10の位置データとを比較して歩行者1と車両10との距離を算出し、算出された距離およびその変化に基づいて、歩行者1が車両10から離れているか、歩行者1が車両10に近づいてきているか、歩行者1が車両10に乗車しようとしているかを判定する。なお、携帯電話機20に内蔵されているGPSと、管理センタ20とが無線通信網を介して相互に通信し、管理センタ20側で測位計算を行なうネットワークアシスト型測位方式を利用するようにしてもよい。
【0068】
以下、実施例2に係る衝突回避通知システムは、実施例1に係る衝突回避通知システムと同様に動作するので、その詳しい動作の説明を省略する。
【0069】
このように、実施例2に係る衝突回避通知システムによれば、携帯電話機20が発する待ち受け電波に基づいて歩行者1の位置を検出するようにしたので、画像解析処理に基づいて歩行者1の位置を検出する実施例1に係る衝突回避通知システムに比べて、衝突回避通知装置100の処理の負荷を軽減することができる。換言すれば、実施例2に係る衝突回避通知システムは、実施例1に係る衝突回避通知システムに比べて、より少ないハードウェア量で衝突回避通知装置100を実現することができる。
【実施例3】
【0070】
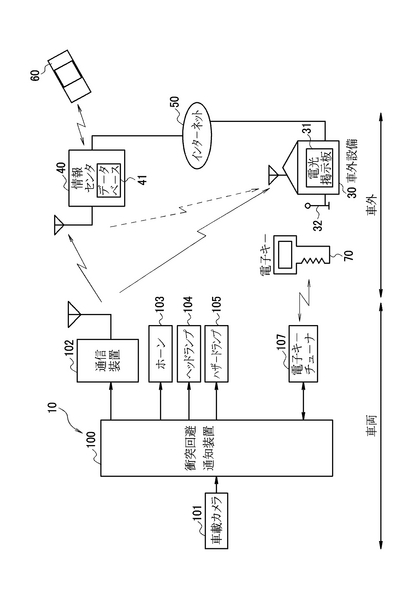
図8は、本発明の実施例3に係る衝突回避通知システムの構成を示すブロック図である。本実施例3に係る衝突回避通知システムは、衝突回避通知装置100が搭載された車両10と、車両10の周辺にある車外設備30と、車両10を無線通信網を介して管理する情報センタ40と、車外設備30と情報センタ40とを接続するインターネット50と、移動体である他の車両60と、歩行者1(図3参照)が所持する電子キー70とから、その主要部が構成されている。
【0071】
衝突回避通知装置100は、車両10の車載カメラ101,通信装置102,ホーン103,ヘッドランプ104,ハザードランプ105および電子キーチューナ107に接続されている。
【0072】
電子キーチューナ107は、電子キー70から発せられた電波を検出する装置である。
【0073】
なお、その他の特に言及しない部分は、図1ないし図5に示した実施例1に係る衝突回避通知システムの対応する部分と同様に構成されているので、対応する部分には同一符号を付して、これらの詳しい説明を省略する。
【0074】
ただし、歩行者検出手段11は、電子キーチューナ107を用いて電子キー70からの電波を受信することにより、歩行者1の位置を検出する手段である。
【0075】
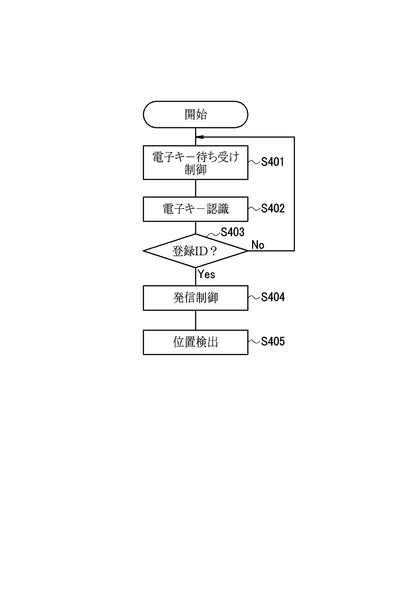
図9は、歩行者検出手段11による歩行者検出処理の詳細を示すフローチャートである。
【0076】
次に、このように構成された実施例3に係る衝突回避通知システムの動作について、実施例1に係る衝突回避通知システムの動作との相違点を中心に説明する。
【0077】
衝突回避通知装置100は、電子キーチューナ107で電子キー70からの電波を検知することより、電子キーチューナ111からの出力に基づいて、電子キー70を所持する歩行者1の位置を定期的に検出する(ステップS101)。
【0078】
詳しくは、電子キーチューナ107は、待ち受け制御中に(ステップS401)、歩行者1が所持する電子キー70の認識を行ない(ステップS402)、電子キー70と電子キーチューナ107との間で登録ID(IDentification)が一致する場合は(ステップS403)、複数の発信器による発信制御を行い(ステップS404)、反応時間の差に基づいて歩行者1の位置を検出する(ステップS405)。
【0079】
以下、実施例3に係る衝突回避通知システムは、実施例1に係る衝突回避通知システムと同様に動作するので、詳しい説明を省略する。
【0080】
このように、実施例3に係る衝突回避通知システムによれば、電子キー70が発する電波に基づいて歩行者1の位置を検出するようにしたので、画像解析処理に基づいて歩行者1の位置を検出する場合に比べて、衝突回避通知装置100の処理の負荷を軽減することができる。換言すれば、実施例3に係る衝突回避通知システムは、電子キー70および電子キーチューナ107という既存技術を前提として構築することができるので、実施例1に係る衝突回避通知システムに比べて、実現性が高い。
【0081】
ところで、上記各実施例では、車載カメラ101による画像認識,携帯電話機20の待ち受け電波検出,および電子キー70の電波検出の各手法により歩行者1の位置を検出するようにしたが、これらの手法を任意の数だけ組み合わせて歩行者1の位置を検出するようにしてもよい。このようにすれば、歩行者1の位置検出の精度をさらに高めることができる。
【0082】
以上、本発明の各実施例を説明したが、これらはあくまで例示にすぎず、本発明はこれらに限定されるものではなく、特許請求の範囲の趣旨を逸脱しない限りにおいて、当業者の知識に基づく種々の変更が可能である。
【図面の簡単な説明】
【0083】
【図1】本発明の実施例1に係る衝突回避通知システムの構成を示すブロック図。
【図2】図1中の衝突回避通知装置の構成を示すブロック図。
【図3】本実施例1に係る衝突回避通知システムの使用状況の一例を説明する図。
【図4】図1中の衝突回避通知装置の処理を示すフローチャート。
【図5】図4中の歩行者検出処理をさらに詳細に示すフローチャート。
【図6】本発明の実施例2に係る衝突回避通知システムの構成を示すブロック図。
【図7】図6中の衝突回避通知装置における歩行者検出処理を示すフローチャート。
【図8】本発明の実施例3に係る衝突回避通知システムの構成を示すブロック図。
【図9】図8中の衝突回避通知装置における歩行者検出処理を示すフローチャート。
【符号の説明】
【0084】
1 歩行者
11 歩行者検出手段
12 歩行者予測進路演算部
13 移動体検出手段
14 移動体予測進路演算部
15 衝突予測演算部
16 衝突回避通知手段
20 携帯電話機
30 車外設備
31 電光掲示板
32 街灯
40 情報センタ
41 データベース
50 インターネット
60 他の車両(移動体)
70 電子キー
100 衝突回避通知装置
101 車載カメラ
102 通信装置
103 ホーン
104 ヘッドランプ
105 ハザードランプ
106 待ち受け電波検出器
107 電子キーチューナ
【技術分野】
【0001】
本発明は衝突回避通知システムに関し、詳しくは車両外にいる歩行者が移動体と衝突するおそれがあるときに通知を行なう衝突回避通知システムに関する。
【背景技術】
【0002】
従来の技術として、交差点に異なる方向から接近する複数の車両の衝突を防止するようにした衝突防止装置が知られている(例えば、特許文献1参照)。
【特許文献1】特開平5−325099号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
しかし、従来の衝突防止装置は、車両と車両との衝突を防止するようにしただけのものであり、車両外にいる歩行者と他の車両との衝突を防止する手段は備えられていなかった。このため、走行中の車両が認識できない歩行者、もしくは歩行者が視界に入っていない走行中の車両を事前に知ることはできないので、その存在に気づくまで衝突回避行動をとることができず、歩行者と車両とは衝突する可能性があった。例えば、車両の利用者(所有者,使用者等)である歩行者が道路を横断して道路の反対車線に駐車した自車両に戻ろうとした場合等に、歩行者の道路横断位置に進入しようとする他の車両に気づかず、衝突が発生する可能性がある。特に、道路がカーブしており、歩行者が横断しようとする道路部分が他の車両を運転する運転者の視界から外れている場合、衝突事故が発生する確率が高くなる。
【0004】
従来、このような衝突事故が発生した場合、他の車両の運転者の前方不注意であるとみなされるケースが多かったが、車両の利用者である歩行者が道路を横断して道路の反対車線に駐車した自車両に戻ろうとするようなときには、自車両が事前に歩行者および他の車両を検知して、歩行者および/または他の車両に通知できれば、衝突事故を未然に回避できる可能性がある。
【0005】
ところが、上述した従来の技術では、車両の利用者である歩行者が道路を横断して道路の反対車線に駐車した自車両に戻ろうとするような場合等の衝突が発生する可能性が高いときに、歩行者および他の車両を検知して、当該歩行者および/または他の車両の運転者に通知するような手段は存在していないという問題点があった。
【0006】
そこで、本発明の課題は、車両周辺の歩行者が移動体(自動車,オートバイ,自転車等の車両を含む移動する物体の総称)との衝突することを避けるために、歩行者および/または移動体に対して衝突回避メッセージを通知することにより、歩行者および/または移動体に衝突回避行動をとらせることができるようにした衝突回避通知システムを提供することにある。
【課題を解決するための手段および発明の効果】
【0007】
請求項1記載の衝突回避通知システムは、車両周辺の歩行者を検出する歩行者検出手段と、前記歩行者検出手段により検出された歩行者の予測進路を演算する歩行者予測進路演算部と、車両周辺の移動体を検出する移動体検出手段と、前記移動体検出手段により検出された移動体の予測進路を演算する移動体予測進路演算部と、前記歩行者予測進路演算部により演算された歩行者の予測進路と前記移動体予測進路演算部により演算された移動体の予測進路とに基づいて歩行者と移動体との衝突可能性を演算する衝突予測演算部と、前記衝突予測演算部により衝突可能性があると演算された場合に前記歩行者および/または前記移動体に対して衝突回避メッセージを通知する回避行動通知手段とを備えることを特徴とする。請求項1記載の衝突回避通知システムによれば、歩行者と移動体とが衝突する可能性がある場合に衝突回避メッセージが歩行者および/または移動体に通知されるので、歩行者は横断しようとする道路部分に移動体が進入してくることを事前に知って衝突回避行動をとることができ、移動体は進行先の道路部分を歩行者が横断することを事前に知って衝突回避行動をとることができるという効果がある。よって、衝突事故を未然に防止することができる。
【0008】
請求項2記載の衝突回避通知システムは、請求項1記載の衝突回避通知システムにおいて、前記歩行者検出手段が、車載カメラから映像を入力し、画像の変化があれば、その変化箇所の画像を解析して歩行者であるかどうかを検出し、歩行者であれば該歩行者の位置を検出することを特徴とする。請求項2記載の衝突回避通知システムによれば、車載カメラから入力された映像を画像解析処理することにより歩行者の位置を検出するようにしたので、歩行者に何らの前提を必要とすることなしに歩行者の位置を検出することができ、汎用性が高い。特に、歩行者を登録利用者に限定しなければ、自車両とは直接関係のない歩行者に対しても、衝突回避行動をとるように衝突回避メッセージを通知することができる。
【0009】
請求項3記載の衝突回避通知システムは、請求項1記載の衝突回避通知システムにおいて、前記歩行者検出手段が、車載カメラから映像を入力し、画像の変化があれば、その変化箇所の画像を解析して歩行者であるかどうかを検出し、歩行者であれば該歩行者が登録利用者であるかどうかを判断し、該歩行者が登録利用者であれば該歩行者の位置を検出することを特徴とする。請求項3記載の衝突回避通知システムによれば、車載カメラから入力された映像を画像解析処理することにより歩行者が登録利用者であるかどうかを検出し、登録利用者である歩行者の位置を検出するようにしたので、車両と特定の関係がある歩行者の位置だけを検出することができる。このため、車両の登録利用者が車外にいるときにも、車両が登録利用者の安全性を高めることができる。
【0010】
請求項4記載の衝突回避通知システムは、請求項1記載の衝突回避通知システムにおいて、前記歩行者検出手段が、前記歩行者の所持する携帯電話機が発する待ち受け電波を走査し、待ち受け電波があれば、該歩行者の位置を検出することを特徴とする。請求項4記載の衝突回避通知システムによれば、携帯電話機が発する待ち受け電波に基づいて歩行者の位置を検出するようにしたので、画像解析処理に基づいて歩行者の位置を検出する場合に比べて、衝突回避通知処理の負荷を軽減することができる。携帯電話機の普及率の向上に伴って比較的容易に歩行者の位置検出を可能にする。
【0011】
請求項5記載の衝突回避通知システムは、請求項1記載の衝突回避通知システムにおいて、前記歩行者検出手段が、前記歩行者の所持する電子キーを認識し、該電子キーの登録IDが前記車両の登録IDと一致する場合に、複数の発信器による発信制御を行い、反応時間の差により歩行者の位置を検出することを特徴とする。請求項5記載の衝突回避通知システムによれば、歩行者の所持する電子キーを認識するようにしたことにより、画像解析処理に基づいて歩行者の位置を検出する場合に比べて、衝突回避通知処理の負荷を軽減することができる。また、電子キーは限定された利用者だけが所持するものであるので、携帯電話機が発する待ち受け電波に基づいて歩行者の位置を検出する場合に比べて、歩行者が登録利用者であるか否かの判定を容易に行なうことができる。
【0012】
請求項6記載の衝突回避通知システムは、請求項1ないし請求項5のいずれかに記載の衝突回避通知システムにおいて、前記歩行者予測進路演算部が、前記歩行者の複数の時刻における位置データに基づいて移動速度および移動方向を求め、歩行者の予測進路を演算することを特徴とする。請求項6記載の衝突回避通知システムによれば、歩行者の複数の時刻における位置データに基づいて移動速度および移動方向を求めるようにしたので、歩行者の予測進路の演算を容易に実行することができる。
【0013】
請求項7記載の衝突回避通知システムは、請求項1記載の衝突回避通知システムにおいて、前記移動体検出手段が、車載カメラから映像を入力し、画像の変化を検出して移動体であるかどうかを検出し、移動体であれば該移動体の位置を検出することを特徴とする。請求項7記載の衝突回避通知システムによれば、車載カメラから入力された映像を画像解析処理することにより移動体の位置を検出するようにしたので、移動体に何らの前提を必要とすることなしに移動体の位置を検出することができ、汎用性が高い。
【0014】
請求項8記載の衝突回避通知システムは、請求項1記載の衝突回避通知システムにおいて、前記移動体検出手段が、車載カメラから映像を入力し、画像の変化を検出して移動体であるかどうかを検出し、移動体であれば該移動体が装備しているGPSのデータを情報センタから得て該移動体の位置を検出することを特徴とする。請求項8記載の衝突回避通知システムによれば、移動体が装備しているGPSのデータを情報センタにて蓄積して該データを利用することにより移動体の位置を検出するようにしたので、画像解析処理に基づいて移動体の位置を検出する場合に比べて、衝突回避通知処理の負荷を軽減することができる。
【0015】
請求項9記載の衝突回避通知システムは、請求項1記載の衝突回避通知システムにおいて、前記移動体検出手段が、車車間通信を使用して移動体の位置を検出することを特徴とする。請求項9記載の衝突回避通知システムによれば、車車間通信を使用して移動体の位置を検出することにより、移動体の位置を素早く検出することができる。
【0016】
請求項10記載の衝突回避通知システムは、請求項1または請求項7ないし請求項9のいずれかに記載の衝突回避通知システムにおいて、前記移動体予測進路演算部が、前記移動体の複数の時刻における位置データに基づいて移動速度および移動方向を求め、移動体の予測進路を演算することを特徴とする。請求項10記載の衝突回避通知システムによれば、移動体の複数の時刻における位置データに基づいて移動速度および移動方向を求めるようにしたので、移動体の予測進路の演算を容易に実行することができる。
【0017】
請求項11記載の衝突回避通知システムは、請求項1ないし請求項10のいずれかに記載の衝突回避通知システムにおいて、前記回避行動通知手段が、車載装備を利用して前記歩行者および/または前記移動体に衝突回避メッセージを通知することを特徴とする。請求項11記載の衝突回避通知システムによれば、ホーン,ヘッドランプ,ハザードランプなどの車載装備を利用して歩行者および/または移動体に衝突回避メッセージを通知するようにしたので、比較的簡単に衝突回避メッセージを通知することができる。
【0018】
請求項12記載の衝突回避通知システムは、請求項1ないし請求項10のいずれかに記載の衝突回避通知システムにおいて、前記回避行動通知手段が、車外設備に対して制御信号を送信して前記歩行者および/または前記移動体に衝突回避メッセージを通知することを特徴とする。請求項12記載の衝突回避通知システムによれば、街灯,電光掲示板などの車外設備に対して制御信号を送信して歩行者および/または移動体に衝突回避メッセージを通知するようにしたので、衝突回避メッセージの通知を大規模に行なうことができ、歩行者および/または移動体が気付きやすいという利点がある。
【0019】
請求項13記載の衝突回避通知システムは、請求項1ないし請求項10のいずれかに記載の衝突回避通知システムにおいて、前記回避行動通知手段が、車車間通信により前記移動体の装備を利用して衝突回避メッセージを通知することを特徴とする。請求項13記載の衝突回避通知システムによれば、車車間通信(直接通信、車外通信網を利用した間接通信)により、ディスプレイ,ハザードランプなどの移動体の装備を利用して衝突回避メッセージを通知するようにしたので、移動体の運転者に衝突回避行動をとるように直接的に伝達することができる。
【発明を実施するための最良の形態】
【0020】
車両周辺の歩行者を監視し、歩行者と移動体である他の車両と衝突するおそれがある場合には、歩行者および/または移動体に衝突回避メッセージを通知することにより、歩行者および/または移動体が衝突回避行動をとれるようにした。
【0021】
以下、本発明の実施例について図面を参照しながら詳細に説明する。
【実施例1】
【0022】
図1は、本発明の実施例1に係る衝突回避通知システムの構成を示すブロック図である。本実施例1に係る衝突回避通知システムは、衝突回避通知装置100が搭載された車両10と、歩行者1(図3参照)が所持する携帯電話機20と、車両10の周辺にある車外設備30と、車両10を無線通信網を介して管理する情報センタ40と、車外設備30と情報センタ40とを接続するインターネット50と、移動体である他の車両60とから、その主要部が構成されている。
【0023】
衝突回避通知装置100は、車両10の車載カメラ101,通信装置102,ホーン103,ヘッドランプ104,およびハザードランプ105に接続されている。衝突回避通知装置100は、車載カメラ101から入力された映像に基づいて歩行者1と移動体である他の車両60との衝突可能性を判定するとともに、判定結果に基づいて通信装置102を用いて、情報センタ40を経由して、あるいはVICS(Vehicle Information and Communication System),ETC(Electronic Toll Collection)等の車外通信網を利用して、歩行者1が所持する携帯電話機20および/または車外設備30の電光掲示板31および/または街灯32等に、たとえば、「他の車両が接近してきていますので、歩道に戻ってください。」等の衝突回避行動を知らせる衝突回避メッセージを通知する。また、衝突回避通知装置100は、移動体である他の車両60には、情報センタ40を経由して、あるいは車車間通信(赤外線通信,レーダー通信等の直接通信,VICS,ETC等の車外通信網を利用した間接通信)を通じて、たとえば、「前方に歩行者がいますので、ブレーキを踏んでください。」等の衝突回避行動を知らせる衝突回避メッセージを通知する。
【0024】
車載カメラ101は、動画撮影が可能なカメラであり、1個もしくは複数の車載カメラ101により車両10の周辺にいる歩行者1および車両10の前方あるいは後方にいる移動体である他の車両60を追尾可能に撮影する。
【0025】
通信装置102は、携帯電話機でもよく、また携帯電話機を使用しない専用の車載データ通信モジュール(Data Communication Module:DCM)を使用するものであってもよい。通信装置102は、衝突回避通知装置100で作成された衝突回避メッセージを、情報センタ40を経由して、あるいは情報センタ40を経由することなしに、携帯電話機20および/または車外設備30に送信する。
【0026】
ホーン103は、円形の金属版に取り付けた共鳴板を、電磁石に心棒を入れたアマチュアで震わせて音を発する電気式の装置である。
【0027】
ヘッドランプ104は、走行ビーム用光源とすれ違いビーム用光源とを有し、両ビームが単一の灯体と前面ガラスとで得られるようにした前照灯である。
【0028】
ハザードランプ105は、方向指示ランプ等を一斉に点滅させる装置である。
【0029】
携帯電話機20は、その電話番号,メールアドレス等が衝突回避通知装置100および情報センタ40のデータベース41に予め登録されている。なお、携帯電話機20には、PHS(Personal Handyphon System),ページャ等の全ての携帯情報通信機器が含まれているものとする。
【0030】
車外設備30は、道路沿いのビルディング,街灯群,信号機等をいい、電光掲示板31および/または街灯32を備える。
【0031】
情報センタ40は、車両10の管理や情報提供を行なう通信センタであり、データベース41を含んで構成されている。情報センタ40は、車両10から送信されてきた衝突回避メッセージを受信すると、衝突回避メッセージを携帯電話機20および/または車外設備30に転送する。
【0032】
インターネット50は、情報センタ40と車外設備30との間を接続している有線通信網である。
【0033】
移動体である他の車両60は、情報センタ40を経由して、あるいは情報センタ40を経由することなしに、車車間通信(直接通信、車外通信網を利用した間接通信)を通じて、衝突回避通知装置100と通信することが可能である。
【0034】
図2は、衝突回避通知装置100の構成を示すブロック図である。この衝突回避通知装置100は、車両10の周辺にいる歩行者1の位置を検出する歩行者検出手段11と、歩行者検出手段11により検出された歩行者1の予測進路を演算する歩行者予測進路演算部12と、車両10の周辺にいる移動体である他の車両60を検出する移動体検出手段13と、移動体検出手段13により検出された移動体である他の車両60の予測進路を演算する移動体予測進路演算部14と、歩行者予測進路演算部12により演算された歩行者1の予測進路と移動体予測進路演算部14により演算された移動体である他の車両60の予測進路とに基づいて歩行者1と移動体である他の車両60との衝突可能性を演算する衝突予測演算部15と、衝突予測演算部15により衝突可能性があると演算された場合に、歩行者1および移動体である他の車両60に対して衝突回避メッセージを通知する回避行動通知手段16とで構成される。
【0035】
歩行者検出手段11は、車載カメラ101を利用して歩行者1の位置を検出する手段である。具体的には、歩行者検出手段11は、車載カメラ101から映像を入力し、画像の変化を検出し、画像の変化があれば、その変化箇所の画像を解析し、歩行者1であるかどうかを検出し、歩行者1であれば、画像を解析して、歩行者1が登録利用者であるかどうかを判断し、歩行者1が登録利用者であれば、画像を解析し、歩行者1の位置を検出する。
【0036】
歩行者予測進路演算部12は、歩行者1の複数の時刻における位置データに基づいて移動速度および移動方向を求め、歩行者1の予測進路を演算する。
【0037】
移動体検出手段13は、車載カメラ101を利用して移動体である他の車両60の位置を検出する。具体的には、移動体検出手段13は、車載カメラ101から映像を入力し、画像の変化を検出し、画像の変化があれば、その変化箇所の画像を解析し、移動体である他の車両60であるかどうかを検出し、移動体である他の車両60であれば、画像を解析し、移動体である他の車両60の位置を検出する。また、移動体検出手段13は、移動体である他の車両60が搭載しているGPSによる位置データ(GPSデータ)を情報センタ40にて蓄積し、そのGPSデータを利用して移動体である他の車両60の位置を検出するようにしてもよい。
【0038】
移動体予測進路演算部14は、移動体である他の車両60の複数の時刻における位置データに基づいて移動速度および移動方向を求め、移動体である他の車両60の予測進路を演算する。
【0039】
衝突予測演算部15は、歩行者予測進路演算部12により演算された歩行者1の予測進路と、移動体予測進路演算部14により演算された移動体である他の車両60の予測進路とに基づいて、歩行者1と移動体である他の車両60との衝突可能性を演算する。
【0040】
回避行動通知手段16は、ホーン103,ヘッドランプ104,ハザードランプ105などの車載装備を利用して歩行者1および/または移動体である他の車両60に衝突回避メッセージを通知したり、電光掲示板31,街灯32などの車外設備30に対して制御信号を送信して歩行者1および/または移動体である他の車両60に衝突回避メッセージを通知したり、車車間通信(直接通信、車外通信網を利用した間接通信)を利用して歩行者1および/または移動体である他の車両60に衝突回避メッセージを通知したり、ディスプレイ,ハザードランプなどの移動体である他の車両60の装備を利用して衝突回避メッセージを通知したりする。
【0041】
図3は、衝突回避通知装置100の使用状況の一例を説明する図である。ここでは、車両の利用者(所有者,使用者等)である歩行者1が道路を横断して道路の反対車線に駐車した自車両10に戻ろうとしたときに、カーブした道路の右手側から移動体である他の車両60が歩行者1の道路横断位置に進入してきた例を示している。衝突回避通知装置100は、歩行者検出手段11により、車載カメラ101からの映像を解析し、歩行者1が自車両10に向かって道路を横断して近づいてくることを検出する。これと同時に、衝突回避通知装置100は、情報センタ40からのGPSデータを受信することにより、移動体である他の車両60が道路上を歩行者1が横断する地点に向けて走行していることを検出する。そして、衝突回避通知装置100は、歩行者1の予測進路と移動体である他の車両60の予測進路とが、同一時刻に同一場所で交差するかどうかに基づいて衝突可能性の有無を判断し、衝突可能性があれば、情報センタ40を通じて走行する他の車両60に衝突回避メッセージを通知する。他の車両60は、車両装備のカーナビゲーション装置,ハザードランプ等に衝突回避メッセージを表示し、運転者にブレーキを踏む等の衝突回避行為をとらせる。また、衝突回避通知装置100は、車外設備30の街灯32に衝突回避メッセージを通知し、街灯32を点滅させる、街灯32の発光色を変える、街灯32によって歩行者1のいる位置だけに光を照射する等の衝突回避表示を行ない、歩行者1に歩道まで引き返す等の衝突回避行為をとらせる。
【0042】
図4は、衝突回避通知装置100の動作を示すフローチャートである。
【0043】
図5は、図4中の歩行者検出処理をさらに詳細に示すフローチャートである。
【0044】
次に、このように構成された実施例1に係る衝突回避通知システムの動作について、図1ないし図5を参照しながら説明する。
【0045】
衝突回避通知装置100は、歩行者検出手段11を連続的もしくは間欠的に作動させることにより、車載カメラ101の映像に基づいて車両10の周辺にいる歩行者1の位置を検出する(ステップS101)。
【0046】
詳しくは、歩行者検出手段11は、車載カメラ101から映像を入力し(ステップS201)、画像の変化を検出する(ステップS202)。画像の変化があれば、歩行者検出手段11は、その変化箇所の画像を解析し(ステップS203)、歩行者1であるかどうかを検出する(ステップS204)。歩行者1であれば、歩行者検出手段11は、さらに画像を解析して(ステップS205)、その歩行者1が車両10に予め登録されている登録利用者(所有者,使用者等)であるかどうかを判断する(ステップS206)。登録利用者であるかどうかの判断は、車載カメラ101で撮影した画像を画像処理して人物を抽出し、この人物の行動パターンを、既に登録されている登録利用者の行動パターンと照らし合わせ、一致した場合に当該人物が登録利用者であると判定する。例えば、車載カメラ101で撮影した画像を入力とし、統計機械学習アルゴリズムを利用して、背景部分の除去処理,機械学習による対象動物体(人物)の認識・検出処理,動き補償,対象動物体の追跡処理,ハイライト行動パターンの判断処理(イベント抽出)を行なう。また、登録利用者として衝突回避通知装置100に予め登録された顔,虹彩などのバイオメトリクス情報の一致によって、登録利用者であると判断してもよい。歩行者1が登録利用者であれば、歩行者検出手段11は、さらに画像を解析し(ステップS207)、歩行者1の位置を検出(特定)する(ステップS208)。なお、不特定多数の歩行者1の位置を検出する場合は、歩行者検出手段11は、歩行者1が登録利用者であるかどうかの判断(ステップS206)を行わずに、位置検出を行なうことができる。また、車載カメラ101が赤外線カメラであり、車両10がナイトビジョン(夜間視野補助機能)を備える場合には、この機能を利用して歩行者1の位置を検出することができる。
【0047】
歩行者検出手段11により車両10の周辺にいる歩行者1が検出されたときには(ステップS102でイエス)、衝突回避通知装置100は、移動体検出手段13を作動させることにより、歩行者1の周辺に移動体である他の車両60が存在するかどうかを検出する(ステップS103)。
【0048】
詳しくは、移動体検出手段13は、歩行者検出手段11と同様に、車載カメラ101から映像を入力し、画像の変化を検出し、画像の変化があれば、その変化箇所の画像を解析し、移動体である他の車両60であるかどうかを検出し、移動体である他の車両60であれば、画像を解析して、移動体である他の車両60の位置を検出する。なお、車載カメラ101が赤外線カメラであり、車両10がナイトビジョン(夜間視野補助機能)を備える場合には、この機能を利用して移動体である他の車両60の位置を検出することができる。
【0049】
また、移動体検出手段13は、車載カメラ101から映像を入力し、画像の変化を検出し、画像の変化があれば、その変化箇所の画像を解析し、移動体である他の車両60であるかどうかを検出し、移動体である他の車両60であれば、移動体である他の車両60の所持しているGPS(Global Positioning System)のデータ(GPSデータ)を情報センタ40のデータベース41にて蓄積して、そのGPSデータを利用することにより、他の車両60の位置を検出する。
【0050】
移動体検出手段13により歩行者1の周辺に移動体である他の車両60が存在すると判定された場合(ステップS104でイエス)、衝突回避通知装置100は、歩行者予測進路演算部12により歩行者1の予測進路を演算する(ステップS105)。詳しくは、歩行者予測進路演算部12は、歩行者1の複数の時刻における位置データに基づいて歩行者1の移動速度および移動方向を求め、歩行者1の予測進路を演算する。
【0051】
また、衝突回避通知装置100は、移動体予測進路演算部14により、移動体である他の車両60の予測進路を演算する(ステップS106)。詳しくは、移動体予測進路演算部14は、移動体である他の車両60の複数の時刻における位置データに基づいて他の車両60の移動速度および移動方向を求め、他の車両60の予測進路を演算する。
【0052】
次に、衝突回避通知装置100は、衝突予測演算部15により、歩行者1の予測進路と移動体である他の車両60の予測進路とに基づいて、歩行者1と他の車両60とが同時刻に同一地点に存在するかどうかを演算し、同時刻に同一地点に存在する可能性があれば、歩行者1と他の車両60とが衝突する可能性(衝突可能性)があると判定する(ステップS108)。
【0053】
衝突可能性があると判定された場合は、衝突回避通知装置100は、回避行動通知手段16により、衝突回避メッセージを歩行者1および/または移動体である他の車両60に通知する(ステップS109)。
【0054】
詳しくは、回避行動通知手段16は、自車両10のホーン103を鳴動させたり、ヘッドランプ104やハザードランプ105を点滅させたりすることにより注意を喚起して、歩行者1および/または移動体である他の車両60に衝突回避メッセージを伝達し、衝突回避行為を行なうように促す。
【0055】
また、回避行動通知手段16は、自車両10の装備を用いた衝突回避メッセージの通知に加えて、衝突回避メッセージを、情報センタ40を経由して、あるいは情報センタ40を経由することなしに、歩行者1の携帯電話機20に送信する。これにより、歩行者1は、携帯電話機20の着信光,着信音,着信バイブレーションにより、視覚,聴覚,触覚を通じて注意を喚起される。さらに、電話を受けて衝突回避メッセージを聞くまたは見ることによって、移動体である他の車両60が迫ってきていることを知り、移動体である他の車両60を避けることになる。また、回避行動通知手段16は、衝突回避メッセージを、情報センタ40を経由して、あるいは情報センタ40を経由することなしに、車外設備30に送信する。すると、車外設備30は、衝突回避メッセージを電光掲示板31に表示するとともに音声で読み上げる。また、車外設備30は、街灯32を点滅させたり、街灯32の発光色を変えたり、街灯32により歩行者1のいる位置だけをスポットライト的に照射したりする。これにより、歩行者1は、電光掲示板31や街灯32の光量変化や音声によって視覚,聴覚を通じて注意を喚起され、衝突回避メッセージを見るまたは聞くことによって、移動体である他の車両60が迫ってきていることを知り、他の車両60を避ける等の衝突回避行動をとることができる。
【0056】
一方、回避行動通知手段16は、衝突回避メッセージを、情報センタ40を経由して、移動体である他の車両60に送信する。これにより、他の車両60の運転者は、所持する携帯電話機や通信機能を有するカーナビゲーション装置等で衝突回避メッセージを受信して、ハザードランプの点滅,カーナビゲーション装置からの音声,シートバイブレータの振動等により視覚,聴覚,触覚を通じて注意を喚起され、衝突回避メッセージを見たり、聞いたり、感じたりすることによって、歩行者1が目前にいることを知り、歩行者1を避ける等の衝突回避行動をとることができる。なお、車両10と他の車両60との間で、車車間通信機能(直接通信機能)が使用できれば、衝突回避メッセージを、情報センタ40を経由することなしに、他の車両60に直接送信するようにしてもよい。さらに、車両10および他の車両60と車外設備30との間で、光ビーコン,VICS(Vehicle Information and Communication System),ETC(Electronic Toll Collection)等を経由して路車間通信機能が使用できれば、衝突回避メッセージを、情報センタ40を経由することなしに、路車間通信により他の車両60に間接的に送信するようにしてもよい。
【0057】
このように、実施例1に係る衝突回避通知システムによれば、車両10の周辺の歩行者1を監視して、歩行者1と移動体である他の車両60とが衝突するおそれがある場合には、歩行者1および/または移動体である他の車両60に対して衝突回避メッセージを通知するようにしたので、歩行者1および/または移動体である他の車両60は衝突回避行動をとることが可能になり、衝突事故を未然に防止することができる。
【実施例2】
【0058】
図6は、本発明の実施例2に係る衝突回避通知システムの構成を示すブロック図である。本実施例2に係る衝突回避通知システムは、衝突回避通知装置100が搭載された車両10と、歩行者1(図3参照)が所持する携帯電話機20と、車両10の周辺にある車外設備30と、車両10を無線通信網を介して管理する情報センタ40と、車外設備30と情報センタ40とを接続するインターネット50と、移動体である他の車両60とから、その主要部が構成されている。
【0059】
衝突回避通知装置100は、車両10の車載カメラ101,通信装置102,ホーン103,ヘッドランプ104,ハザードランプ105,および待ち受け電波検出器106に接続されている。
【0060】
待ち受け電波検出器106は、携帯電話機20が基地局(図示せず)との間のコネクションをとるために発信する待ち受け電波を検出する装置である。
【0061】
なお、その他の特に言及しない部分は、図1ないし図5に示した実施例1に係る衝突回避通知システムの対応する部分と同様に構成されているので、対応する部分には同一符号を付して、これらの詳しい説明を省略する。
【0062】
ただし、歩行者検出手段11は、待ち受け電波検出器106を用いて携帯電話機20の待ち受け電波を走査することにより、歩行者1の位置を検出する手段である。
【0063】
図7は、歩行者検出手段11による歩行者検出処理の詳細を示すフローチャートである。
【0064】
次に、このように構成された実施例2に係る衝突回避通知システムの動作について、実施例1に係る衝突回避通知システムの動作との相違点を中心に説明する。
【0065】
衝突回避通知装置100は、歩行者検出手段11を連続的もしくは間欠的に作動させることにより、歩行者1の所持する携帯電話機20の待ち受け電波を検知して車両10の周辺にいる歩行者1の位置を検出する(ステップS101)。
【0066】
詳しくは、歩行者検出手段11は、待ち受け電波検出器106により携帯電話機20が発する待ち受け電波を走査し(ステップS301)、待ち受け電波があれば(ステップS302でイエス)、携帯電話機20を所持する歩行者1の位置を検出する(ステップS303)。
【0067】
また、歩行者1が車両10の周辺にいない場合、携帯電話機20に内蔵されているGPSから位置データを無線通信網等を介して取得して、歩行者1の位置データと自車両10の位置データとを比較して歩行者1と車両10との距離を算出し、算出された距離およびその変化に基づいて、歩行者1が車両10から離れているか、歩行者1が車両10に近づいてきているか、歩行者1が車両10に乗車しようとしているかを判定する。なお、携帯電話機20に内蔵されているGPSと、管理センタ20とが無線通信網を介して相互に通信し、管理センタ20側で測位計算を行なうネットワークアシスト型測位方式を利用するようにしてもよい。
【0068】
以下、実施例2に係る衝突回避通知システムは、実施例1に係る衝突回避通知システムと同様に動作するので、その詳しい動作の説明を省略する。
【0069】
このように、実施例2に係る衝突回避通知システムによれば、携帯電話機20が発する待ち受け電波に基づいて歩行者1の位置を検出するようにしたので、画像解析処理に基づいて歩行者1の位置を検出する実施例1に係る衝突回避通知システムに比べて、衝突回避通知装置100の処理の負荷を軽減することができる。換言すれば、実施例2に係る衝突回避通知システムは、実施例1に係る衝突回避通知システムに比べて、より少ないハードウェア量で衝突回避通知装置100を実現することができる。
【実施例3】
【0070】
図8は、本発明の実施例3に係る衝突回避通知システムの構成を示すブロック図である。本実施例3に係る衝突回避通知システムは、衝突回避通知装置100が搭載された車両10と、車両10の周辺にある車外設備30と、車両10を無線通信網を介して管理する情報センタ40と、車外設備30と情報センタ40とを接続するインターネット50と、移動体である他の車両60と、歩行者1(図3参照)が所持する電子キー70とから、その主要部が構成されている。
【0071】
衝突回避通知装置100は、車両10の車載カメラ101,通信装置102,ホーン103,ヘッドランプ104,ハザードランプ105および電子キーチューナ107に接続されている。
【0072】
電子キーチューナ107は、電子キー70から発せられた電波を検出する装置である。
【0073】
なお、その他の特に言及しない部分は、図1ないし図5に示した実施例1に係る衝突回避通知システムの対応する部分と同様に構成されているので、対応する部分には同一符号を付して、これらの詳しい説明を省略する。
【0074】
ただし、歩行者検出手段11は、電子キーチューナ107を用いて電子キー70からの電波を受信することにより、歩行者1の位置を検出する手段である。
【0075】
図9は、歩行者検出手段11による歩行者検出処理の詳細を示すフローチャートである。
【0076】
次に、このように構成された実施例3に係る衝突回避通知システムの動作について、実施例1に係る衝突回避通知システムの動作との相違点を中心に説明する。
【0077】
衝突回避通知装置100は、電子キーチューナ107で電子キー70からの電波を検知することより、電子キーチューナ111からの出力に基づいて、電子キー70を所持する歩行者1の位置を定期的に検出する(ステップS101)。
【0078】
詳しくは、電子キーチューナ107は、待ち受け制御中に(ステップS401)、歩行者1が所持する電子キー70の認識を行ない(ステップS402)、電子キー70と電子キーチューナ107との間で登録ID(IDentification)が一致する場合は(ステップS403)、複数の発信器による発信制御を行い(ステップS404)、反応時間の差に基づいて歩行者1の位置を検出する(ステップS405)。
【0079】
以下、実施例3に係る衝突回避通知システムは、実施例1に係る衝突回避通知システムと同様に動作するので、詳しい説明を省略する。
【0080】
このように、実施例3に係る衝突回避通知システムによれば、電子キー70が発する電波に基づいて歩行者1の位置を検出するようにしたので、画像解析処理に基づいて歩行者1の位置を検出する場合に比べて、衝突回避通知装置100の処理の負荷を軽減することができる。換言すれば、実施例3に係る衝突回避通知システムは、電子キー70および電子キーチューナ107という既存技術を前提として構築することができるので、実施例1に係る衝突回避通知システムに比べて、実現性が高い。
【0081】
ところで、上記各実施例では、車載カメラ101による画像認識,携帯電話機20の待ち受け電波検出,および電子キー70の電波検出の各手法により歩行者1の位置を検出するようにしたが、これらの手法を任意の数だけ組み合わせて歩行者1の位置を検出するようにしてもよい。このようにすれば、歩行者1の位置検出の精度をさらに高めることができる。
【0082】
以上、本発明の各実施例を説明したが、これらはあくまで例示にすぎず、本発明はこれらに限定されるものではなく、特許請求の範囲の趣旨を逸脱しない限りにおいて、当業者の知識に基づく種々の変更が可能である。
【図面の簡単な説明】
【0083】
【図1】本発明の実施例1に係る衝突回避通知システムの構成を示すブロック図。
【図2】図1中の衝突回避通知装置の構成を示すブロック図。
【図3】本実施例1に係る衝突回避通知システムの使用状況の一例を説明する図。
【図4】図1中の衝突回避通知装置の処理を示すフローチャート。
【図5】図4中の歩行者検出処理をさらに詳細に示すフローチャート。
【図6】本発明の実施例2に係る衝突回避通知システムの構成を示すブロック図。
【図7】図6中の衝突回避通知装置における歩行者検出処理を示すフローチャート。
【図8】本発明の実施例3に係る衝突回避通知システムの構成を示すブロック図。
【図9】図8中の衝突回避通知装置における歩行者検出処理を示すフローチャート。
【符号の説明】
【0084】
1 歩行者
11 歩行者検出手段
12 歩行者予測進路演算部
13 移動体検出手段
14 移動体予測進路演算部
15 衝突予測演算部
16 衝突回避通知手段
20 携帯電話機
30 車外設備
31 電光掲示板
32 街灯
40 情報センタ
41 データベース
50 インターネット
60 他の車両(移動体)
70 電子キー
100 衝突回避通知装置
101 車載カメラ
102 通信装置
103 ホーン
104 ヘッドランプ
105 ハザードランプ
106 待ち受け電波検出器
107 電子キーチューナ
【特許請求の範囲】
【請求項1】
車両周辺の歩行者を検出する歩行者検出手段と、
前記歩行者検出手段により検出された歩行者の予測進路を演算する歩行者予測進路演算部と、
車両周辺の移動体を検出する移動体検出手段と、
前記移動体検出手段により検出された移動体の予測進路を演算する移動体予測進路演算部と、
前記歩行者予測進路演算部により演算された歩行者の予測進路と前記移動体予測進路演算部により演算された移動体の予測進路とに基づいて歩行者と移動体との衝突可能性を演算する衝突予測演算部と、
前記衝突予測演算部により衝突可能性があると演算された場合に前記歩行者および/または前記移動体に対して衝突回避メッセージを通知する回避行動通知手段と
を備えることを特徴とする衝突回避通知システム。
【請求項2】
前記歩行者検出手段が、車載カメラから映像を入力し、画像の変化があれば、その変化箇所の画像を解析して歩行者であるかどうかを検出し、歩行者であれば該歩行者の位置を検出することを特徴とする請求項1記載の衝突回避通知システム。
【請求項3】
前記歩行者検出手段が、車載カメラから映像を入力し、画像の変化があれば、その変化箇所の画像を解析して歩行者であるかどうかを検出し、歩行者であれば該歩行者が登録利用者であるかどうかを判断し、該歩行者が登録利用者であれば該歩行者の位置を検出することを特徴とする請求項1記載の衝突回避通知システム。
【請求項4】
前記歩行者検出手段が、前記歩行者の所持する携帯電話機が発する待ち受け電波を走査し、待ち受け電波があれば、該歩行者の位置を検出することを特徴とする請求項1記載の衝突回避通知システム。
【請求項5】
前記歩行者検出手段が、前記歩行者の所持する電子キーを認識し、該電子キーの登録IDが前記車両の登録IDと一致する場合に、複数の発信器による発信制御を行い、反応時間の差により歩行者の位置を検出することを特徴とする請求項1記載の衝突回避通知システム。
【請求項6】
前記歩行者予測進路演算部が、前記歩行者の複数の時刻における位置データに基づいて移動速度および移動方向を求め、前記歩行者の予測進路を演算することを特徴とする請求項1ないし請求項5のいずれかに記載の衝突回避通知システム。
【請求項7】
前記移動体検出手段が、車載カメラから映像を入力し、画像の変化を検出して移動体であるかどうかを検出し、移動体であれば該移動体の位置を検出することを特徴とする請求項1記載の衝突回避通知システム。
【請求項8】
前記移動体検出手段が、車載カメラから映像を入力し、画像の変化を検出して移動体であるかどうかを検出し、移動体であれば該移動体が装備しているGPSのデータを情報センタから得て該移動体の位置を検出することを特徴とする請求項1記載の衝突回避通知システム。
【請求項9】
前記移動体検出手段が、車車間通信を使用して移動体の位置を検出することを特徴とする請求項1記載の衝突回避通知システム。
【請求項10】
前記移動体予測進路演算部が、前記移動体の複数の時刻における位置データに基づいて移動速度および移動方向を求め、移動体の予測進路を演算することを特徴とする請求項1または請求項7ないし請求項9のいずれかに記載の衝突回避通知システム。
【請求項11】
前記回避行動通知手段が、車載装備を利用して前記歩行者および/または前記移動体に衝突回避メッセージを通知することを特徴とする請求項1ないし請求項10のいずれかに記載の衝突回避通知システム。
【請求項12】
前記回避行動通知手段が、車外設備に対して制御信号を送信して前記歩行者および/または前記移動体に衝突回避メッセージを通知することを特徴とする請求項1ないし請求項10のいずれかに記載の衝突回避通知システム。
【請求項13】
前記回避行動通知手段が、車車間通信により前記移動体の装備を利用して衝突回避メッセージを通知することを特徴とする請求項1ないし請求項10のいずれかに記載の衝突回避通知システム。
【請求項1】
車両周辺の歩行者を検出する歩行者検出手段と、
前記歩行者検出手段により検出された歩行者の予測進路を演算する歩行者予測進路演算部と、
車両周辺の移動体を検出する移動体検出手段と、
前記移動体検出手段により検出された移動体の予測進路を演算する移動体予測進路演算部と、
前記歩行者予測進路演算部により演算された歩行者の予測進路と前記移動体予測進路演算部により演算された移動体の予測進路とに基づいて歩行者と移動体との衝突可能性を演算する衝突予測演算部と、
前記衝突予測演算部により衝突可能性があると演算された場合に前記歩行者および/または前記移動体に対して衝突回避メッセージを通知する回避行動通知手段と
を備えることを特徴とする衝突回避通知システム。
【請求項2】
前記歩行者検出手段が、車載カメラから映像を入力し、画像の変化があれば、その変化箇所の画像を解析して歩行者であるかどうかを検出し、歩行者であれば該歩行者の位置を検出することを特徴とする請求項1記載の衝突回避通知システム。
【請求項3】
前記歩行者検出手段が、車載カメラから映像を入力し、画像の変化があれば、その変化箇所の画像を解析して歩行者であるかどうかを検出し、歩行者であれば該歩行者が登録利用者であるかどうかを判断し、該歩行者が登録利用者であれば該歩行者の位置を検出することを特徴とする請求項1記載の衝突回避通知システム。
【請求項4】
前記歩行者検出手段が、前記歩行者の所持する携帯電話機が発する待ち受け電波を走査し、待ち受け電波があれば、該歩行者の位置を検出することを特徴とする請求項1記載の衝突回避通知システム。
【請求項5】
前記歩行者検出手段が、前記歩行者の所持する電子キーを認識し、該電子キーの登録IDが前記車両の登録IDと一致する場合に、複数の発信器による発信制御を行い、反応時間の差により歩行者の位置を検出することを特徴とする請求項1記載の衝突回避通知システム。
【請求項6】
前記歩行者予測進路演算部が、前記歩行者の複数の時刻における位置データに基づいて移動速度および移動方向を求め、前記歩行者の予測進路を演算することを特徴とする請求項1ないし請求項5のいずれかに記載の衝突回避通知システム。
【請求項7】
前記移動体検出手段が、車載カメラから映像を入力し、画像の変化を検出して移動体であるかどうかを検出し、移動体であれば該移動体の位置を検出することを特徴とする請求項1記載の衝突回避通知システム。
【請求項8】
前記移動体検出手段が、車載カメラから映像を入力し、画像の変化を検出して移動体であるかどうかを検出し、移動体であれば該移動体が装備しているGPSのデータを情報センタから得て該移動体の位置を検出することを特徴とする請求項1記載の衝突回避通知システム。
【請求項9】
前記移動体検出手段が、車車間通信を使用して移動体の位置を検出することを特徴とする請求項1記載の衝突回避通知システム。
【請求項10】
前記移動体予測進路演算部が、前記移動体の複数の時刻における位置データに基づいて移動速度および移動方向を求め、移動体の予測進路を演算することを特徴とする請求項1または請求項7ないし請求項9のいずれかに記載の衝突回避通知システム。
【請求項11】
前記回避行動通知手段が、車載装備を利用して前記歩行者および/または前記移動体に衝突回避メッセージを通知することを特徴とする請求項1ないし請求項10のいずれかに記載の衝突回避通知システム。
【請求項12】
前記回避行動通知手段が、車外設備に対して制御信号を送信して前記歩行者および/または前記移動体に衝突回避メッセージを通知することを特徴とする請求項1ないし請求項10のいずれかに記載の衝突回避通知システム。
【請求項13】
前記回避行動通知手段が、車車間通信により前記移動体の装備を利用して衝突回避メッセージを通知することを特徴とする請求項1ないし請求項10のいずれかに記載の衝突回避通知システム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2006−31443(P2006−31443A)
【公開日】平成18年2月2日(2006.2.2)
【国際特許分類】
【出願番号】特願2004−209982(P2004−209982)
【出願日】平成16年7月16日(2004.7.16)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
【公開日】平成18年2月2日(2006.2.2)
【国際特許分類】
【出願日】平成16年7月16日(2004.7.16)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
[ Back to top ]