
衝突検出装置
【課題】路上に存在する障害物を迅速かつ適切に識別することができる衝突検出装置を提供する。
【解決手段】車両Aに搭載された、車両前方を撮影する撮影手段10と、撮影手段10によって撮影された画像に基づいて路上に存在する対象物を検出する路上対象物検出手段20と、を備えており、路上対象物検出手段20は、撮影手段10によって撮影された画像に基づいて、対象物から車両Aまでの間隔を算出する距離算出部21と、撮影手段10によって撮影された画像において、対象物が立体物であるか平面標識であるかを判別する基準となる判別ラインを設定する判別ライン設定部22と、間隔が所定の距離となっている対象物について、判別ラインとの相対的な位置に基づいて立体物であるか平面標識であるかを判別する対象物判定部23と、を備えている。
【解決手段】車両Aに搭載された、車両前方を撮影する撮影手段10と、撮影手段10によって撮影された画像に基づいて路上に存在する対象物を検出する路上対象物検出手段20と、を備えており、路上対象物検出手段20は、撮影手段10によって撮影された画像に基づいて、対象物から車両Aまでの間隔を算出する距離算出部21と、撮影手段10によって撮影された画像において、対象物が立体物であるか平面標識であるかを判別する基準となる判別ラインを設定する判別ライン設定部22と、間隔が所定の距離となっている対象物について、判別ラインとの相対的な位置に基づいて立体物であるか平面標識であるかを判別する対象物判定部23と、を備えている。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、衝突検出装置に関する。さらに詳しくは、車載されたカメラ等の撮影手段によって撮影された車両前方画像に基づいて、前方に存在する障害物などとの衝突を防止する衝突検出装置に関する。
【背景技術】
【0002】
従来、車両同士の衝突や車両と歩行者との接触などを防ぐ技術として、車両に搭載したカメラによって撮影された画像を利用する技術が開発されている。例えば、画像から車両や歩行者、その他の障害物等の物体をパターン認識やオプティカルフロー等を利用して検出し、検出された物体が何であるか、また、その物体が静止しているものか移動しているものかを把握して、物体と車両との衝突を防ぐ技術が開発されており、多数の特許出願がなされている。
【0003】
かかる技術では、画像から障害物等の物体、つまり、立体物を的確に検出することが重要であるが、撮影された画像は2次元であるため、路面に描かれた路面標識などを誤って立体物として検出してしまう可能性がある。
この誤検出を防ぐ方法として、2台のカメラを同期させて路面等を撮影し、撮影された対象物が立体物であるか路面標識であるかを識別する方法がある。しかし、かかる方法の場合には、(1)カメラを2台使用するため装置が大型化複雑化する、(2)2台のカメラの撮影タイミングを正確に合わせる制御が必要となる、(3)2台のカメラで撮影された画像から立体物を検出する処理が複雑になるため処理速度が遅くなる、といった問題がある。
【0004】
そこで、車両に搭載された1台のカメラを利用して、この1台のカメラによって異なる時間に撮影された画像に基づいて、撮影された対象物が立体物であるか路面標識であるかを識別する技術が開発されている(特許文献1〜4、非特許文献1)。
【0005】
特許文献1には、自動車等の接近物と誤認される可能性がある路面標識、例えばゼブラゾーンなどの路面標識の画像(静止物画像)を予め保存しておき、撮影された画像から検出される接近物と静止物画像とを比較することによって路面標識を検出する技術が開示されている。
【0006】
また、特許文献2には、画像中において、障害物と推定される対象物(候補対象物)を検出し、この候補対象物が存在する領域の輝度に基づいて、画像中の候補対象物が何であるか、また、候補対象物が路面上の垂直物か否かを判別する技術が開示されている。
特許文献2の技術では、画像中の候補対象物が存在する領域において、水平方向および垂直方向のエッジヒストグラムをそれぞれ算出する。そして、算出された各エッジヒストグラムを、水平方向および垂直方向の参照エッジヒストグラム(記憶されている路上障害物の水平方向および垂直方向のエッジヒストグラム)とそれぞれ比較して、候補対象物を特定する。
この特許文献2の技術では、各エッジヒストグラムと参照エッジヒストグラムとを比較する際、各エッジヒストグラムを横軸方向に拡大縮小することによって、各エッジヒストグラムと参照エッジヒストグラムとの差が最も小さくなる拡大縮小倍率を求めている。そして、水平方向の拡大縮小倍率と垂直方向の拡大縮小倍率が一致する場合には候補対象が路面上の垂直物と判断して候補対象物を特定するが、両者が一致しない場合には候補対象が路面標識やマンホール等と判断している。
【0007】
さらに、特許文献3、4および非特許文献1では、以下のようにして、画像内の対象物が、路面上の標識(つまり平面)であるかそれともを路上に存在する立体物であるか判断している。
まず、撮影された画像(前画像)において水平線を検出し、その水平線の上部に垂直な候補領域(障害物領域)を設定し、近接する複数の候補領域からなる組を設定する。
ついで、前画像から所定の時間経過後の画像(現在画像)において、前画像において設定された組と対応する組を検出する。
そして、検出された組が、路面または路面と垂直な面(つまり立体物に属する面)のいずれの面に属するかを、画像内における複数の水平線の縦方向の距離差に基づいて判断している。
【先行技術文献】
【特許文献】
【0008】
【特許文献1】特開2002−314989号公報
【特許文献2】特開2005−332120号公報
【特許文献3】特開2004−32460号公報
【特許文献4】特開2004−246436号公報
【非特許文献】
【0009】
【非特許文献1】Ryuzo Okada et al,“Obstacle Detection Using Projective Invariant and Vanishing Lines”, Proceedings of the Ninth IEEEInternational Conference on Computer Vision,2003
【発明の概要】
【発明が解決しようとする課題】
【0010】
ところで、走行している車両は移動速度が速いため、衝突を回避するには、撮影された画像の処理をできる限り短時間で行わなければならない。つまり、撮影された画像中の対象物の判断を短時間で行う必要がある。
【0011】
しかるに、特許文献1の技術は、撮影された対象物が立体物であるか路面標識であるかを識別するためにパターンマッチングの手法を採用しているため判断のための処理時間が長くなる上、予め想定されている平面対象物しか判断することができない。
また、特許文献2の技術も、実質的にはパターンマッチングによる方法を利用して撮影された対象物が立体物であるか路面標識であるかを識別しているため、画像処理に時間がかかる。しかも、対象物を識別する際に、各エッジヒストグラムを拡大縮小する処理が必要となることから、通常のパターンマッチングよりもさらに処理時間が長くなる。
さらに、特許文献3、4および非特許文献1の技術では、水平線を検出することができれば対象物を識別することは可能と考えられるので、予め想定されている平面対象物以外でも識別することは可能と考える。しかし、前画像および現在画像の両画像において水平線を検出できない対象物については適切に識別することができない可能性がある。
【0012】
本発明は上記事情に鑑み、路上に存在する障害物を迅速かつ適切に識別することができる衝突検出装置を提供することを目的とする。
【課題を解決するための手段】
【0013】
第1発明の衝突検出装置は、車両に搭載された、該車両前方を撮影する撮影手段と、該撮影手段によって撮影された画像に基づいて路上に存在する対象物を検出する路上対象物検出手段と、を備えており、前記路上対象物検出手段は、前記撮影手段によって撮影された画像に基づいて、前記対象物から前記車両までの間隔を算出する距離算出部と、前記撮影手段によって撮影された画像において、前記対象物が立体物であるか平面標識であるかを判別する基準となる判別ラインを設定する判別ライン設定部と、前記間隔が所定の距離となっている前記対象物について、前記判別ラインとの相対的な位置に基づいて立体物であるか平面標識であるかを判別する対象物判定部と、を備えていることを特徴とする。
第2発明の衝突検出装置は、第1発明において、前記判別ライン設定部によって設定される判別ラインが、路面と平行な水平線であり、前記対象物判定部は、前記対象物の一部が前記判別ラインよりも上方に存在するか否かに基づいて該対象物が立体物であるか平面標識であるかを判別する機能を有していることを特徴とする。
第3発明の衝突検出装置は、第1または第2発明において、前記距離算出部は、前記画像における無限遠点の位置に基づいて前記間隔を算出するものであることを特徴とする。
第4発明の衝突検出装置は、第1、第2または第3発明において、前記撮影手段が、時間連続的に画像を撮影するものであり、前記対象物判定部は、前記時間連続的に撮影された複数枚の画像において、該複数枚の画像中に存在する同一対象物の水平方向長さおよび垂直方向長さを算出し、各画像で得られた水平方向長さと垂直方向長さの比の変化に基づいて該対象物が立体物であるか平面標識であるかを判別する機能を有していることを特徴とする。
【発明の効果】
【0014】
第1発明によれば、路上に存在する対象物と判別ラインとの相対的な位置を比較するだけであるから、対象物が立体物であるか平面標識であるかを簡単な処理で判別することができる。しかも、各画像において、車両からの距離が所定の距離となっている対象物のみを判別するので、判別を行う処理対象を少なくでき、判別処理を簡単かつ短時間で行うことができる。
第2発明によれば、判別ラインが路面と平行な水平線であるから、判別ラインを設定する処理が容易である。しかも、対象物の一部が判別ラインよりも上方に存在するか否かを判定するだけであるから、対象物が立体物であるか平面標識であるか判別する処理が非常に簡単であり、その処理時間も短くすることができる。
第3発明によれば、画像における無限遠点の位置に基づいて車両から対象物までの間隔を算出するので、簡単かつ短時間で間隔を算出することができる。
第4発明によれば、対象物が立体物であるか平面標識であるかの判別を、判別ラインによる判別に加えて、水平方向長さと垂直方向長さの比の変化による判別も行うので、より正確に対象物を判別することができる。しかも、対象物の水平方向長さおよび垂直方向長さとその比を算出するだけであるから、画像処理および判別に要する時間は短くできる。したがって、両方法による判別を行なっても、判別時間が長くなることを防ぐことができる。
【図面の簡単な説明】
【0015】
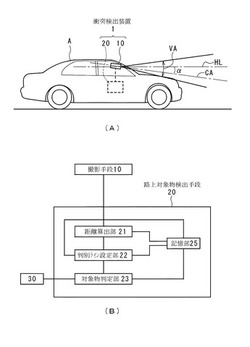
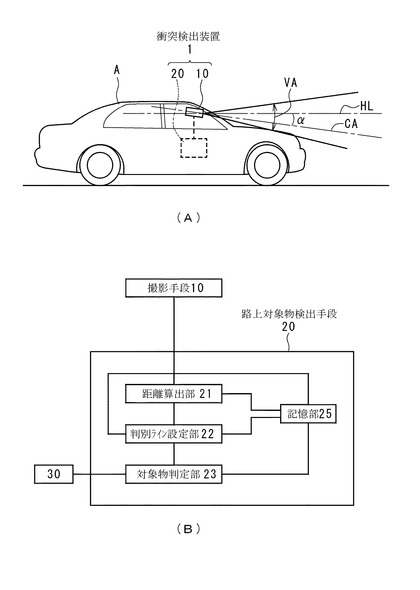
【図1】本実施形態の衝突検出装置1の概略説明図であって、(A)は車両Aへの搭載状況を説明した図であり、(B)は衝突検出装置1のブロック図である。
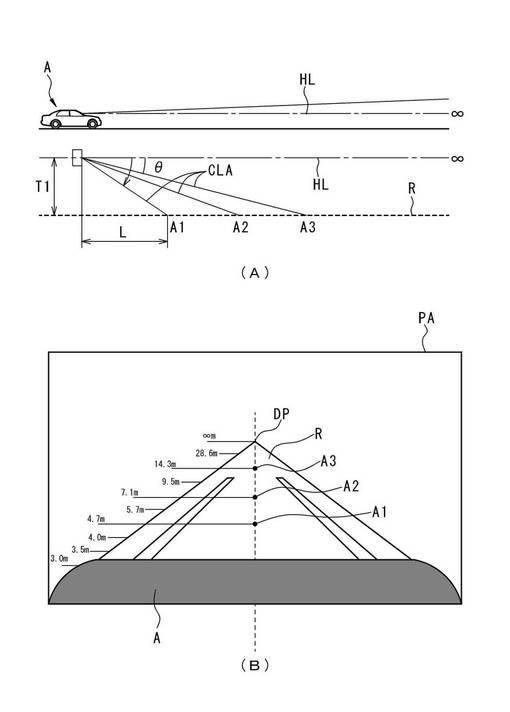
【図2】距離算出部21による距離算出方法を説明した図である。
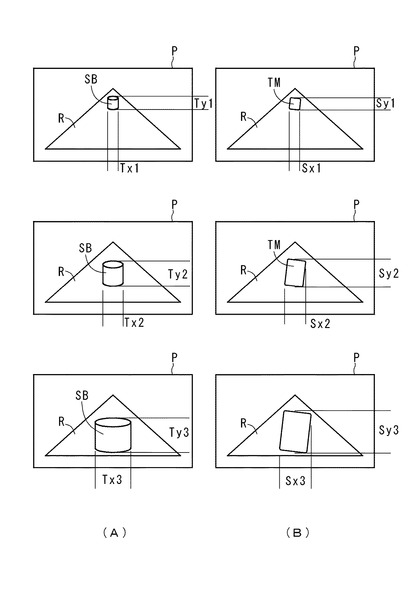
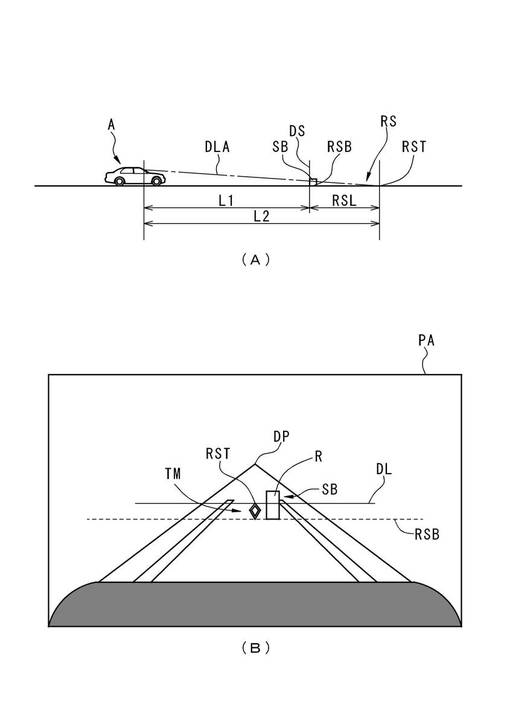
【図3】(A)は判別ラインDLを利用して立体物と路面標識を判別する判別方法の概略説明図であり、(B)は判別ライン設定部22によって判別ラインDLが設定された画像DPの概略説明図である。
【図4】対象物SBの水平方向長さおよび垂直方向長さの比を利用して立体物と路面標識を判別する判別方法の概略説明図である。
【発明を実施するための形態】
【0016】
つぎに、本発明の実施形態を図面に基づき説明する。
本発明の衝突検出装置は、車両に搭載された撮影手段によって撮影された画像に基づいて車両が車両前方に存在する他の車両や障害物等と衝突する可能性を検出する装置であり、車両等の立体物と路上標識などの平面物とを判別でき、立体物と車両との間隔を迅速に検出できるようにしたことに特徴を有している。
【0017】
なお、本明細書において、平面物とは、路面に描かれた最高速度の標示やUターン禁止の標示などの路上標識だけでなく、路面上に存在する厚さが薄い板状の物体なども含む概念である。
また、本明細書において、立体物とは、他の車両や、歩行者、路側に設けられた道路標識・看板、道路上の落下物などの車両と衝突する可能性がある物体を意味している。
【0018】
(本実施形態の衝突検出装置1の説明)
図1に示すように、本実施形態の衝突検出装置1は、撮影手段10と、路上対象物検出手段20とを備えたものであり、車両Aに搭載されている。
【0019】
(撮影手段10)
図1に示すように、撮影手段10は、例えば、CCDカメラ等の画像を撮影し、外部に撮影した画像のデータ(画像データおよび撮影タイミング等)を送信することができるものである。この撮影手段10は、車両A前方の車道Rの状況が撮影できる位置に配設されている。例えば、車両のフロントウインドウを通して車両A前方の車道Rを測定することができるように、バックミラーの近傍に配設することができるが、車両A前方の車道Rを測定できる位置であれば、車両Aにおいて撮影手段10を配設する位置はとくに限定されない。
【0020】
なお、撮影手段10は、平坦な車道R上に車両Aを配置したときに、撮影される画像Pの横方向が車道Rと平行となるように配設されるが、その光軸CAの車道Rに対する相対的な角度はとくに限定されない。例えば、撮影手段10をその光軸CAが車道Rに対して平行となるように配設してもよいし、車道Rと平行な平行線に対してその光軸CAが下傾するように配設してもよい(図1(A)参照)。
【0021】
(路上対象物検出手段20)
路上対象物検出手段20は、撮影手段10によって撮影された画像Pに基づいて、車両Aの前方の路上に存在する立体物と車両Aとの衝突の可能性を判断する機能を有するものである。この路上対象物検出手段20は、距離算出部21と、判別ライン設定部22と、対象物判定部23と、記憶部25とを備えている。
【0022】
なお、路上対象物検出手段20は、例えば、コンピュータなどの制御装置であり、以下に説明する距離算出部21、判別ライン設定部22、対象物判定部23の機能を実行することができるものである。
また、記憶部25は、例えば、ハードディスクやメモリなどのように、画像Pや路上対象物の検出結果などの情報を記憶しておくことができるものである。この記憶部25は、撮影手段10や距離算出部21、判別ライン設定部22、対象物判定部23などから送信されるデータを記憶し、また、距離算出部21等の要求に応じて記憶しているデータを送信する機能を有している。
さらに、路上対象物検出手段20は、撮影手段10の作動(例えば、画像Pを撮影するタイミング等)を制御する制御機能を有していてもよい。
【0023】
(距離算出部21)
距離算出部21は、撮影手段10から送信される画像Pのデータに基づいて、画像P内における車道Rの領域の各点と車両Aとの距離を算出するものである。この距離とは、撮影手段10と車道Rの領域の各点との水平距離、つまり、車道Rに沿った方向における撮影手段10から車道Rの領域の各点までの距離であって、画像P内に撮影されている車道R上の各点と車両Aとの実際の距離、つまり、実空間での距離(以下、単に実距離Lという)である。
【0024】
距離算出部21は、実距離Lを以下の方法によって算出する。
【0025】
撮影手段10によって撮影された画像P内には、車道Rとこの車道R以外の画像(例えば、遠方の画像や車道R側方の画像)が撮影されている。この画像Pから、車道Rおよび車道R上に存在するもの(他の車両や歩行者などの障害物、路上標識など)だけを検出する。車道Rおよび車道R上に存在するものの検出は、画像にフィルタリング処理などの公知の処理を施すことによって行うことができる。
【0026】
車道Rおよび車道R上に存在するものが検出されると、画像Pからこれら以外を除去した画像(以下、事前処理画像PAという)を形成する。この事前処理画像PAは、図2(A)に示すような画像となる。
【0027】
かかる事前処理画像PAでは、車道Rは、直線であっても曲っていても、事前処理画像PA内の一点に収束するように撮影される。この車道Rが収束する点を消失点DPとすると、この消失点DPを通る水平線(事前処理画像PAでは左右方向に引いた線)は、実空間では、撮影手段10が設けられている高さT1(つまり、車道Rの路面からの高さ)に位置する車道Rと平行な平面と概ね一致する。すると、実際の空間において、事前処理画像PA内の車道R上の点(例えば、図2(A)のA1〜A3)は、車道Rと平行な平面(基準面HL)と、撮影手段10と車道R上の各点とを結ぶ線CLAとがなす角度θから算出することができる。そして、事前処理画像PA内の車道R上の点を、車両Aの先端から消失点DPまで順次移動させれば、事前処理画像PA内の車道R上の各位置について実距離Lを算出することができる。言い換えれば、基準面HLと線CLAとがなす角度θを変化させれば、事前処理画像PA内の車道R上の各位置について実距離Lを算出することができるのである。
【0028】
この実距離Lは、以下の式によって求めることができる。
L=T1×tan(90−θ)
【0029】
上記式によって実距離Lを算出すれば、例えば、高さT1が1mの場合、角度θと実距離Lは以下の関係となる(図2(B))。
【表1】

【0030】
なお、事前処理画像PA内に撮影されている点について、実空間内での線CLAと基準面HLとがなす角度θは、事前処理画像PA内における消失点DPの位置、撮影手段10の光軸CAと基準面HLとがなす角度αおよび画角VA(図1(A)参照)から求めることができる。具体的には、事前処理画像PA内において、事前処理画像PA内に撮影されている実空間内での領域、具体的には、角度αと画角VAとから、消失点DPから車両Aから何m前の位置まで事前処理画像PA内に撮影されているかを把握できる。すると、事前処理画像PA内において消失点DPから距離を求めたい点までの長さが把握できれば、実空間内での線CLAと基準面HLとがなす角度θを求めることができる。
【0031】
また、距離算出部21は、事前処理画像PAにおいて車道R上に存在するものを検出すると、検出されたもの(以下、対象物という)までの距離を算出する機能も有している。具体的には、事前処理画像PAにおいて対象物が車道Rと接触している点を検出し、この検出された点について、上述した方法を使用することによって車両Aから対象物までの距離を算出することができる。
なお、対象物が車道Rと接触している点は、事前処理画像PA上において対象物の下端の位置を特定するか、または事前処理画像PA内の対象物の像に基づいて下端の位置を推定する等の方法により検出することができる。
【0032】
そして、距離算出部21は、実距離Lと画像P(または事前処理画像PA)内における各点の座標のデータ(路上距離情報)、および、検出された対象物の座標(例えば車道Rとが接触している位置の座標)および車両Aまでの距離(対象物距離情報)を、判別ライン設定部22や対象物判定部23、記憶部25に送信する機能を有している。
【0033】
(判別ライン設定部22)
判別ライン設定部22は、距離算出部21から送信されるデータ(路上距離情報)と、撮影手段10が撮影した画像P(または事前処理画像PA)のデータとに基づいて、事前処理画像PA内に判別ラインDLを設定する機能を有するものである。
なお、画像Pのデータは、判別ライン設定部22に対して撮影手段10から直接データが送信されてもよいが、判別ライン設定部22が必要に応じて記憶部25から記憶されている画像Pのデータを読みだしてもよい。
【0034】
判別ライン設定部22によって設定される判別ラインDLは、事前処理画像PA内に車道Rと平行に設けられる線であり、事前処理画像PAにおいて、車両Aから所定の距離だけ離れた位置であって車道Rから所定の高さに相当する位置に設定される(図3(B)参照)。
【0035】
具体的には、判別ラインDLは、以下のようにして設定される。
まず、実空間において、撮影手段10から車道Rの走行方向に沿って所定の距離(図3(A)ではL1)だけ離れた位置(図3(A)では基準位置RSB)を設定する。ついで、基準位置RSBから車道Rの走行方向に沿って所定の距離(図3(A)ではRSL)だけ離れた位置(図3(A)では先端位置RST)を設定し、実空間において、撮影手段10と先端位置RSTとを結ぶ線分(図3(A)では線分DLA)を算出する。そして、実空間において、基準位置において車道Rと垂直に形成される面(評価面DS)を設定し、この評価面DSと線分DLAとが交差する交差点を求める。最後に、事前処理画像PAにおいてこの交差点と対応する点を算出し、この点を通り車道Rと平行な線を判別ラインDLとする。
実空間で設定された交差点から事前処理画像PAにおいてこの交差点と対応する点は対象物の下端の位置を画像上で特定する方法または下端の位置を推定する方法と同様の方法で算出することができる。
【0036】
なお、判別ラインDLは、事前処理画像PA上では、実質的に先端位置RSTを通る車道Rと平行な線と一致する。簡便な方法としては、先端位置RSTを通る車道Rと平行な線を事前処理画像PAに設定して、判別ラインDLとしてもよい。
また、判別ラインDLを上記のごとき方法で設定する理由は後述する。
【0037】
また、基準位置RSBおよび先端位置RSTは全ての画像Pにおいて共通のものを事前に設定してもよいし、各画像Pから抽出した対象物に基づいて、各画像毎に設定してもよい。共通の基準位置RSBおよび先端位置RSTを事前に設定する場合には、基準位置RSBおよび先端位置RSTは車両Aからの距離(図3におけるL1、L2)によって規定すれば、基準位置RSBおよび先端位置RSTに基づいて、評価面DSおよび線分DLAを求めることができるので、判別ラインDLを設定することができる。
また、各画像Pから抽出した対象物に基づいて、各画像毎に基準位置RSBおよび先端位置RSTを設定する場合には、距離算出部21によって算出された路上距離情報に基づいて、実空間に基準位置RSBおよび先端位置RSTを戻せば、上記方法によって判別ラインDLを設定することができる。
【0038】
また、判別ライン設定部22は、各事前処理画像PAについて設定された判別ラインDLのデータ(例えば、距離等、以下、判別ライン情報という)は、対象物判定部23や記憶部25に送信する機能を有している。
【0039】
(対象物判定部23)
対象物判定部23は、判別ライン設定部22から送信される判別ライン情報と、距離算出部21で算出された対象物距離情報に基づいて、距離算出部21において検出された対象物が立体物であるか平面物であるかを判別する機能を有するものである。
具体的には、対象物判定部23では、対象物と判別ラインDLとの相対的な位置に基づいて対象物が立体物であるか平面標識であるかを判別する。
【0040】
(立体物と平面標識の識別)
以下、対象物判定部23において、対象物が立体物であるか平面標識であるかを判別する方法を説明する。
【0041】
図3(B)に示すように車道Rに平面標識TMが描かれている場合には、図3(A)に示すように、平面標識TMにおいて最も車両Aに近い点を基準位置RSBとし、平面標識TMにおいて最も車両Aから遠い点を先端位置RSTとする。すると、事前処理画像PAに設定される判別ラインDLは、上述した方法によって、図3(B)のように設定される。つまり、事前処理画像PA上では、平面標識TMの先端を通るように判別ラインDLが設定される。
【0042】
ここで、図3(A)に示すように、基準位置RSBの位置に立体物SBが存在し、車両Aから基準位置RSBまでの距離と、車両Aから立体物SBと車道Rの接触点までの距離が同じ距離であるとする。すると、立体物SBがある程度の高さを有する場合には、事前処理画像PAにおいて、立体物SBの一部は判別ラインDLよりも上方にも存在する。つまり、立体物SBの高さが、基準位置RSBの位置における線分DLAの高さよりも高い場合には、立体物SBの一部は判別ラインDLよりも上方にも存在する。
【0043】
上記関係に基づけば、事前処理画像PA内において、対象物下端から車両Aまでの距離が基準位置RSBまでの距離と同じであって、事前処理画像PA内の対象物の一部が判別ラインDLよりも上方に位置する場合には、この対象物が立体物SBであると判断することができる。
一方、対象物下端から車両Aまでの距離が基準位置RSBまでの距離と同じであって、事前処理画像PA内の対象物の全体が判別ラインDLよりも下方に位置する場合には、この対象物が平面標識TMであると判断することができる。
【0044】
なお、対象物判定部23は上記の方法によって対象物が立体物SBであるか平面標識TMであるかを判断するので、判断する対象物は、原則、車両Aまでの距離が基準位置RSBの距離と同じものに限定される。
【0045】
また、対象物判定部23は、運転者に警告を発する警報装置やブレーキなどを作動させる運転制御装置などの衝突防止手段30などに接続されていてもよい。この場合、検出された対象物が立体物の場合には、対象物判定部23から衝突防止手段30に信号を発信するようにしておけば、走行判断部23からの信号を受信した衝突防止手段30がブザーを鳴らしたりインジケータを点滅させたりすることもできるし、衝突回避のためにブレーキなどを作動させることもできる。
【0046】
(本実施形態の衝突検出装置1の作用効果)
本実施形態の衝突検出装置1が、車両Aが車両前方に存在する他の車両や障害物等と衝突する可能性を検出する動作について説明する。
【0047】
以下では、衝突検出装置1において、車両Aから基準位置RSBまでの距離L1および車両Aから先端位置RSTまでの距離L2を予め設定する場合を説明する。
【0048】
まず、衝突検出装置1において、距離L1および距離L2を設定する。この状態で車両Aを走行させると、所定の時間毎に画像Pが撮影される。例えば、車両Aが60km/hで走行している場合には、画像Pは1/30秒間隔で撮影される。
【0049】
なお、画像Pを撮影する時間間隔は、走行速度に関わらず一定としてもよいが、車両Aの走行速度によって変化させる方が、他の車両や障害物等を適切に認識できるので、好ましい。例えば、ある画像Pを撮影してから次の画像Pを撮影するまでの車両Aの移動距離が1〜2m以下となるような間隔で測定することが好ましい。
【0050】
撮影された画像Pは、距離算出部21によって、画像Pから、車道Rおよび車道R上に存在する対象物が検出され、事前処理画像PAが形成される(図3(B)参照)。そして、事前処理画像PAを用いて、事前処理画像PA内の車道R上の各位置における実距離Lが算出されるとともに、検出された対象物から車両Aまでの距離も算出される。
【0051】
ついで、距離算出部21によって算出された実距離Lに基づいて、事前処理画像PAには判別ラインDLが設定される。そして、判別ラインDLが設定されると、車両Aまでの距離が距離L1と同じ対象物について、判別ラインDLとの相対的な位置が比較される。つまり、事前処理画像PA内において、対象物の上端の位置が判別ラインDLよりも上方に位置するか否かが判断される。
【0052】
そして、対象物の上端の位置が判別ラインDLよりも下方に位置すると判断された場合には、この対象物は平面標識TMであると認識され、つぎの画像Pについて処理が行われる。
【0053】
一方、対象物の上端の位置が判別ラインDLよりも上方に位置すると判断された場合には、この対象物は立体物SBであると判断される。すると、対象物判定部23から衝突防止手段30に信号が発信されるので、運転者に危険を知らせることができるし、自動的にブレーキを作動させて衝突を回避させることもできる。
【0054】
以上のごとく、本実施形態の衝突検出装置1によれば、事前処理画像PAにおいて、車道Rに存在する対象物と判別ラインDLとの相対的な位置を比較するだけで、対象物が立体物SBであるか平面標識TMであるかを判別することができる。
【0055】
しかも、対象物が立体物SBであるか平面標識TMであるかの判別は、各事前処理画像PAにおいて、車両Aからの距離が所定の距離、つまり、距離L1となっている対象物のみを対象とするので、判別を行う処理対象を少なくでき、判別処理を簡単かつ短時間で行うことができる。
【0056】
なお、上記例では、判別ラインDLとして、事前処理画像PAにおいて車道Rと平行な線を設定した。この場合には、判別ラインDLを設定する処理が容易である上、対象物の判別の際に、対象物の一部が判別ラインDLよりも上方に存在するか否かを判定するだけで判断できる。したがって、対象物が立体物SBであるか平面標識TMであるか判別する処理が非常に簡単となるし、その処理時間も短くすることができる。
しかし、判別ラインDLとして、事前処理画像PAにおいて車道Rと平行な線としなくてもよい。例えば、粗悪なレンズを使用した場合などでは、レンズのひずみを考慮した形状のラインを用いて計測してもよい。その場合には、システムに使用する機器の価格を抑えることができるので、システム全体の価格を抑えることができるという利点が得られる。
【0057】
また、上記例では、事前処理画像PAにおける無限遠点、つまり、車道Rの消失点DPを基準として、事前処理画像PA内の車道R上の各位置から車両Aまでの実距離Lおよび対象物から車両Aまでの間隔を求めた。この場合には、事前処理画像PAだけから実距離Lを求めることができるので、実距離Lおよび対象物から車両Aまでの間隔を、簡単かつ短時間で間隔を算出することができる。
しかし、対象物から車両までの間隔は、対象物に存在する寸法既知な部分(例えばナンバープレート)を検出することによって求めてもよい。すると、撮影されている部分の大きさと画像上での大きさとを比較すれば、対象物から車両までの間隔を算出することができる。その場合には、対象画像から下端を検出しなくても距離が計測できるという利点が得られる。
【0058】
(判別可能立体物高について)
また、判別ラインDLは、撮影手段10から基準位置RSBまでの距離L1、撮影手段10から先端位置RSTまでの距離L2(つまり、L1+DLA)、および車道Rから撮影手段10までの高さT1、によって変化する。例えば、車道Rから撮影手段10までの高さT1を1mで一定とし、基準位置RSBから先端位置RSTまでの距離DLAを5mで一定とした場合には、立体物SBとして判別できる高さは、以下のとおりである。
【表2】
【0059】
なお、表2から分かるように、上記方法によって、車道R上の全ての立体物SBを検出することは実質的に難しく、距離L1などの影響により、立体物SBとして判別できる高さが変化する。
例えば、表2に示すように、距離L1が長くなるほど、対象物を立体物SBとして判別できる高さが低くなるので、立体物SBを平面標識TMと誤認する可能性を低くできる。一方、距離L1が長くなるほど、車両Aの上下振動、計測誤差の影響を受けやすくなる。
また、距離DLAは、想定される平面標識TMのうち、最長のものに合わせることが好ましい。しかし、距離DLAが長くなると距離L2も長くなるので、立体物SBを平面標識TMと誤認する可能性は低くできる一方、車両Aの上下振動、計測誤差の影響を受けやすくなる。
さらに、車両Aによって、撮影手段10が取り付けられる高さT1が変化する。例えば、トラック等では高さT1が普通車の2倍近い高さとなる場合がある。高さT1は、低いほうが立体物SBを平面標識TMと誤認する可能性は低くできる一方、車両Aの上下振動、計測誤差の影響を受けやすくなる。
【0060】
以上のごとき事情があるので、判別ラインDLを設定する基準となるパラメータ、つまり、撮影手段10から基準位置RSBまでの距離L1、撮影手段10から先端位置RSTまでの距離L2、および車道Rから撮影手段10までの高さT1は、本実施形態の衝突検出装置1を搭載する車両Aの大きさや走行する道路状況等によって適宜設定することが好ましい。
【0061】
例えば、普通車であって、一般の公道を走行する場合であれば、距離L1を10m程度、距離L2を20m程度、高さT1を1m程度とすれば、平面標識TMを立体物SBと適切に識別することができる。
【0062】
(比率による方法)
また、上述した判別ラインDLを利用して立体物SBと平面標識TMとを識別する方法とともに、比率を利用した方法も使用して立体物SBと平面標識TMとを識別すれば、両者を識別する精度を高くすることができる。
【0063】
図4に示すように、対象物に対して車両Aが接近している場合には、対象物と車両Aとの距離が近づくにつれ、画像P内における対象物は大きくなる。
ここで、図4(A)は立体物SBの対象物に車両Aが接近している場合であり、図4(B)は平面標識TMの対象物に車両Aが接近している場合を示している。
【0064】
図4(A)に示すように、対象物が立体物SBの場合には、画像P内の対象物は、その幅Txとその高さTyの比率は一定の状態に維持される。
一方、図4(B)に示すように、対象物が平面標識TMの場合には、画像P内の対象物は、その幅Txとその高さTyの比率が変化し、幅Txの増加割合に比べて高さTyの増加割合が大きくなる。つまり、幅Txと高さTyの比率が変化する。
したがって、異なる時間に撮影された画像Pにおいて、対象物の幅Txと高さTyの比率を算出し、その変動を確認すれば、対象物が立体物SBであるか平面標識TMであるかを識別することができる。
【0065】
そして、ある画像Pにおいて、車両Aからの距離が所定の距離、つまり、距離L1となっている対象物について判別ラインLによる判別を行うとともに、その対象物の幅Txと高さTyの比率が現在の画像Pまでにどのように変動したかを確認すれば、判別ラインLと比率の両方で立体物SBと平面標識TMとを識別することができる。すると、判別ラインLだけによる判別よりも、より正確な識別を行うことができる。
【0066】
しかも、各画像Pについて、対象物の幅Tx(図4では水平方向長さ)および高さTy(図4では垂直方向長さ)を算出し、その比を算出するだけであるから、画像処理および判別に要する時間は短くできる。したがって、両方法による判別を行なっても、判別時間が長くなることを防ぐことができる。
【0067】
(他の実施例)
上記例では、判別ラインLを一本だけ設定する場合を説明したが、判別ラインLは複数本設定してもよい。この場合、同一の対象物を複数判別することもできるので、識別ミスを防ぐことができる。また、一枚の画像Pで、異なる距離に存在する複数の対象物の識別を同時に行うことも可能となる。
【産業上の利用可能性】
【0068】
本発明の衝突検出装置は、車両に搭載され、前方に存在する障害物などを検出する装置として適している。
【符号の説明】
【0069】
1 衝突検出装置
10 撮影手段
20 路上対象物検出手段
21 距離算出部
22 判別ライン設定部
23 対象物判定部
DL 判別ライン
A 車両
P 画像
R 車道
SB 立体物
TM 平面標識
【技術分野】
【0001】
本発明は、衝突検出装置に関する。さらに詳しくは、車載されたカメラ等の撮影手段によって撮影された車両前方画像に基づいて、前方に存在する障害物などとの衝突を防止する衝突検出装置に関する。
【背景技術】
【0002】
従来、車両同士の衝突や車両と歩行者との接触などを防ぐ技術として、車両に搭載したカメラによって撮影された画像を利用する技術が開発されている。例えば、画像から車両や歩行者、その他の障害物等の物体をパターン認識やオプティカルフロー等を利用して検出し、検出された物体が何であるか、また、その物体が静止しているものか移動しているものかを把握して、物体と車両との衝突を防ぐ技術が開発されており、多数の特許出願がなされている。
【0003】
かかる技術では、画像から障害物等の物体、つまり、立体物を的確に検出することが重要であるが、撮影された画像は2次元であるため、路面に描かれた路面標識などを誤って立体物として検出してしまう可能性がある。
この誤検出を防ぐ方法として、2台のカメラを同期させて路面等を撮影し、撮影された対象物が立体物であるか路面標識であるかを識別する方法がある。しかし、かかる方法の場合には、(1)カメラを2台使用するため装置が大型化複雑化する、(2)2台のカメラの撮影タイミングを正確に合わせる制御が必要となる、(3)2台のカメラで撮影された画像から立体物を検出する処理が複雑になるため処理速度が遅くなる、といった問題がある。
【0004】
そこで、車両に搭載された1台のカメラを利用して、この1台のカメラによって異なる時間に撮影された画像に基づいて、撮影された対象物が立体物であるか路面標識であるかを識別する技術が開発されている(特許文献1〜4、非特許文献1)。
【0005】
特許文献1には、自動車等の接近物と誤認される可能性がある路面標識、例えばゼブラゾーンなどの路面標識の画像(静止物画像)を予め保存しておき、撮影された画像から検出される接近物と静止物画像とを比較することによって路面標識を検出する技術が開示されている。
【0006】
また、特許文献2には、画像中において、障害物と推定される対象物(候補対象物)を検出し、この候補対象物が存在する領域の輝度に基づいて、画像中の候補対象物が何であるか、また、候補対象物が路面上の垂直物か否かを判別する技術が開示されている。
特許文献2の技術では、画像中の候補対象物が存在する領域において、水平方向および垂直方向のエッジヒストグラムをそれぞれ算出する。そして、算出された各エッジヒストグラムを、水平方向および垂直方向の参照エッジヒストグラム(記憶されている路上障害物の水平方向および垂直方向のエッジヒストグラム)とそれぞれ比較して、候補対象物を特定する。
この特許文献2の技術では、各エッジヒストグラムと参照エッジヒストグラムとを比較する際、各エッジヒストグラムを横軸方向に拡大縮小することによって、各エッジヒストグラムと参照エッジヒストグラムとの差が最も小さくなる拡大縮小倍率を求めている。そして、水平方向の拡大縮小倍率と垂直方向の拡大縮小倍率が一致する場合には候補対象が路面上の垂直物と判断して候補対象物を特定するが、両者が一致しない場合には候補対象が路面標識やマンホール等と判断している。
【0007】
さらに、特許文献3、4および非特許文献1では、以下のようにして、画像内の対象物が、路面上の標識(つまり平面)であるかそれともを路上に存在する立体物であるか判断している。
まず、撮影された画像(前画像)において水平線を検出し、その水平線の上部に垂直な候補領域(障害物領域)を設定し、近接する複数の候補領域からなる組を設定する。
ついで、前画像から所定の時間経過後の画像(現在画像)において、前画像において設定された組と対応する組を検出する。
そして、検出された組が、路面または路面と垂直な面(つまり立体物に属する面)のいずれの面に属するかを、画像内における複数の水平線の縦方向の距離差に基づいて判断している。
【先行技術文献】
【特許文献】
【0008】
【特許文献1】特開2002−314989号公報
【特許文献2】特開2005−332120号公報
【特許文献3】特開2004−32460号公報
【特許文献4】特開2004−246436号公報
【非特許文献】
【0009】
【非特許文献1】Ryuzo Okada et al,“Obstacle Detection Using Projective Invariant and Vanishing Lines”, Proceedings of the Ninth IEEEInternational Conference on Computer Vision,2003
【発明の概要】
【発明が解決しようとする課題】
【0010】
ところで、走行している車両は移動速度が速いため、衝突を回避するには、撮影された画像の処理をできる限り短時間で行わなければならない。つまり、撮影された画像中の対象物の判断を短時間で行う必要がある。
【0011】
しかるに、特許文献1の技術は、撮影された対象物が立体物であるか路面標識であるかを識別するためにパターンマッチングの手法を採用しているため判断のための処理時間が長くなる上、予め想定されている平面対象物しか判断することができない。
また、特許文献2の技術も、実質的にはパターンマッチングによる方法を利用して撮影された対象物が立体物であるか路面標識であるかを識別しているため、画像処理に時間がかかる。しかも、対象物を識別する際に、各エッジヒストグラムを拡大縮小する処理が必要となることから、通常のパターンマッチングよりもさらに処理時間が長くなる。
さらに、特許文献3、4および非特許文献1の技術では、水平線を検出することができれば対象物を識別することは可能と考えられるので、予め想定されている平面対象物以外でも識別することは可能と考える。しかし、前画像および現在画像の両画像において水平線を検出できない対象物については適切に識別することができない可能性がある。
【0012】
本発明は上記事情に鑑み、路上に存在する障害物を迅速かつ適切に識別することができる衝突検出装置を提供することを目的とする。
【課題を解決するための手段】
【0013】
第1発明の衝突検出装置は、車両に搭載された、該車両前方を撮影する撮影手段と、該撮影手段によって撮影された画像に基づいて路上に存在する対象物を検出する路上対象物検出手段と、を備えており、前記路上対象物検出手段は、前記撮影手段によって撮影された画像に基づいて、前記対象物から前記車両までの間隔を算出する距離算出部と、前記撮影手段によって撮影された画像において、前記対象物が立体物であるか平面標識であるかを判別する基準となる判別ラインを設定する判別ライン設定部と、前記間隔が所定の距離となっている前記対象物について、前記判別ラインとの相対的な位置に基づいて立体物であるか平面標識であるかを判別する対象物判定部と、を備えていることを特徴とする。
第2発明の衝突検出装置は、第1発明において、前記判別ライン設定部によって設定される判別ラインが、路面と平行な水平線であり、前記対象物判定部は、前記対象物の一部が前記判別ラインよりも上方に存在するか否かに基づいて該対象物が立体物であるか平面標識であるかを判別する機能を有していることを特徴とする。
第3発明の衝突検出装置は、第1または第2発明において、前記距離算出部は、前記画像における無限遠点の位置に基づいて前記間隔を算出するものであることを特徴とする。
第4発明の衝突検出装置は、第1、第2または第3発明において、前記撮影手段が、時間連続的に画像を撮影するものであり、前記対象物判定部は、前記時間連続的に撮影された複数枚の画像において、該複数枚の画像中に存在する同一対象物の水平方向長さおよび垂直方向長さを算出し、各画像で得られた水平方向長さと垂直方向長さの比の変化に基づいて該対象物が立体物であるか平面標識であるかを判別する機能を有していることを特徴とする。
【発明の効果】
【0014】
第1発明によれば、路上に存在する対象物と判別ラインとの相対的な位置を比較するだけであるから、対象物が立体物であるか平面標識であるかを簡単な処理で判別することができる。しかも、各画像において、車両からの距離が所定の距離となっている対象物のみを判別するので、判別を行う処理対象を少なくでき、判別処理を簡単かつ短時間で行うことができる。
第2発明によれば、判別ラインが路面と平行な水平線であるから、判別ラインを設定する処理が容易である。しかも、対象物の一部が判別ラインよりも上方に存在するか否かを判定するだけであるから、対象物が立体物であるか平面標識であるか判別する処理が非常に簡単であり、その処理時間も短くすることができる。
第3発明によれば、画像における無限遠点の位置に基づいて車両から対象物までの間隔を算出するので、簡単かつ短時間で間隔を算出することができる。
第4発明によれば、対象物が立体物であるか平面標識であるかの判別を、判別ラインによる判別に加えて、水平方向長さと垂直方向長さの比の変化による判別も行うので、より正確に対象物を判別することができる。しかも、対象物の水平方向長さおよび垂直方向長さとその比を算出するだけであるから、画像処理および判別に要する時間は短くできる。したがって、両方法による判別を行なっても、判別時間が長くなることを防ぐことができる。
【図面の簡単な説明】
【0015】
【図1】本実施形態の衝突検出装置1の概略説明図であって、(A)は車両Aへの搭載状況を説明した図であり、(B)は衝突検出装置1のブロック図である。
【図2】距離算出部21による距離算出方法を説明した図である。
【図3】(A)は判別ラインDLを利用して立体物と路面標識を判別する判別方法の概略説明図であり、(B)は判別ライン設定部22によって判別ラインDLが設定された画像DPの概略説明図である。
【図4】対象物SBの水平方向長さおよび垂直方向長さの比を利用して立体物と路面標識を判別する判別方法の概略説明図である。
【発明を実施するための形態】
【0016】
つぎに、本発明の実施形態を図面に基づき説明する。
本発明の衝突検出装置は、車両に搭載された撮影手段によって撮影された画像に基づいて車両が車両前方に存在する他の車両や障害物等と衝突する可能性を検出する装置であり、車両等の立体物と路上標識などの平面物とを判別でき、立体物と車両との間隔を迅速に検出できるようにしたことに特徴を有している。
【0017】
なお、本明細書において、平面物とは、路面に描かれた最高速度の標示やUターン禁止の標示などの路上標識だけでなく、路面上に存在する厚さが薄い板状の物体なども含む概念である。
また、本明細書において、立体物とは、他の車両や、歩行者、路側に設けられた道路標識・看板、道路上の落下物などの車両と衝突する可能性がある物体を意味している。
【0018】
(本実施形態の衝突検出装置1の説明)
図1に示すように、本実施形態の衝突検出装置1は、撮影手段10と、路上対象物検出手段20とを備えたものであり、車両Aに搭載されている。
【0019】
(撮影手段10)
図1に示すように、撮影手段10は、例えば、CCDカメラ等の画像を撮影し、外部に撮影した画像のデータ(画像データおよび撮影タイミング等)を送信することができるものである。この撮影手段10は、車両A前方の車道Rの状況が撮影できる位置に配設されている。例えば、車両のフロントウインドウを通して車両A前方の車道Rを測定することができるように、バックミラーの近傍に配設することができるが、車両A前方の車道Rを測定できる位置であれば、車両Aにおいて撮影手段10を配設する位置はとくに限定されない。
【0020】
なお、撮影手段10は、平坦な車道R上に車両Aを配置したときに、撮影される画像Pの横方向が車道Rと平行となるように配設されるが、その光軸CAの車道Rに対する相対的な角度はとくに限定されない。例えば、撮影手段10をその光軸CAが車道Rに対して平行となるように配設してもよいし、車道Rと平行な平行線に対してその光軸CAが下傾するように配設してもよい(図1(A)参照)。
【0021】
(路上対象物検出手段20)
路上対象物検出手段20は、撮影手段10によって撮影された画像Pに基づいて、車両Aの前方の路上に存在する立体物と車両Aとの衝突の可能性を判断する機能を有するものである。この路上対象物検出手段20は、距離算出部21と、判別ライン設定部22と、対象物判定部23と、記憶部25とを備えている。
【0022】
なお、路上対象物検出手段20は、例えば、コンピュータなどの制御装置であり、以下に説明する距離算出部21、判別ライン設定部22、対象物判定部23の機能を実行することができるものである。
また、記憶部25は、例えば、ハードディスクやメモリなどのように、画像Pや路上対象物の検出結果などの情報を記憶しておくことができるものである。この記憶部25は、撮影手段10や距離算出部21、判別ライン設定部22、対象物判定部23などから送信されるデータを記憶し、また、距離算出部21等の要求に応じて記憶しているデータを送信する機能を有している。
さらに、路上対象物検出手段20は、撮影手段10の作動(例えば、画像Pを撮影するタイミング等)を制御する制御機能を有していてもよい。
【0023】
(距離算出部21)
距離算出部21は、撮影手段10から送信される画像Pのデータに基づいて、画像P内における車道Rの領域の各点と車両Aとの距離を算出するものである。この距離とは、撮影手段10と車道Rの領域の各点との水平距離、つまり、車道Rに沿った方向における撮影手段10から車道Rの領域の各点までの距離であって、画像P内に撮影されている車道R上の各点と車両Aとの実際の距離、つまり、実空間での距離(以下、単に実距離Lという)である。
【0024】
距離算出部21は、実距離Lを以下の方法によって算出する。
【0025】
撮影手段10によって撮影された画像P内には、車道Rとこの車道R以外の画像(例えば、遠方の画像や車道R側方の画像)が撮影されている。この画像Pから、車道Rおよび車道R上に存在するもの(他の車両や歩行者などの障害物、路上標識など)だけを検出する。車道Rおよび車道R上に存在するものの検出は、画像にフィルタリング処理などの公知の処理を施すことによって行うことができる。
【0026】
車道Rおよび車道R上に存在するものが検出されると、画像Pからこれら以外を除去した画像(以下、事前処理画像PAという)を形成する。この事前処理画像PAは、図2(A)に示すような画像となる。
【0027】
かかる事前処理画像PAでは、車道Rは、直線であっても曲っていても、事前処理画像PA内の一点に収束するように撮影される。この車道Rが収束する点を消失点DPとすると、この消失点DPを通る水平線(事前処理画像PAでは左右方向に引いた線)は、実空間では、撮影手段10が設けられている高さT1(つまり、車道Rの路面からの高さ)に位置する車道Rと平行な平面と概ね一致する。すると、実際の空間において、事前処理画像PA内の車道R上の点(例えば、図2(A)のA1〜A3)は、車道Rと平行な平面(基準面HL)と、撮影手段10と車道R上の各点とを結ぶ線CLAとがなす角度θから算出することができる。そして、事前処理画像PA内の車道R上の点を、車両Aの先端から消失点DPまで順次移動させれば、事前処理画像PA内の車道R上の各位置について実距離Lを算出することができる。言い換えれば、基準面HLと線CLAとがなす角度θを変化させれば、事前処理画像PA内の車道R上の各位置について実距離Lを算出することができるのである。
【0028】
この実距離Lは、以下の式によって求めることができる。
L=T1×tan(90−θ)
【0029】
上記式によって実距離Lを算出すれば、例えば、高さT1が1mの場合、角度θと実距離Lは以下の関係となる(図2(B))。
【表1】
【0030】
なお、事前処理画像PA内に撮影されている点について、実空間内での線CLAと基準面HLとがなす角度θは、事前処理画像PA内における消失点DPの位置、撮影手段10の光軸CAと基準面HLとがなす角度αおよび画角VA(図1(A)参照)から求めることができる。具体的には、事前処理画像PA内において、事前処理画像PA内に撮影されている実空間内での領域、具体的には、角度αと画角VAとから、消失点DPから車両Aから何m前の位置まで事前処理画像PA内に撮影されているかを把握できる。すると、事前処理画像PA内において消失点DPから距離を求めたい点までの長さが把握できれば、実空間内での線CLAと基準面HLとがなす角度θを求めることができる。
【0031】
また、距離算出部21は、事前処理画像PAにおいて車道R上に存在するものを検出すると、検出されたもの(以下、対象物という)までの距離を算出する機能も有している。具体的には、事前処理画像PAにおいて対象物が車道Rと接触している点を検出し、この検出された点について、上述した方法を使用することによって車両Aから対象物までの距離を算出することができる。
なお、対象物が車道Rと接触している点は、事前処理画像PA上において対象物の下端の位置を特定するか、または事前処理画像PA内の対象物の像に基づいて下端の位置を推定する等の方法により検出することができる。
【0032】
そして、距離算出部21は、実距離Lと画像P(または事前処理画像PA)内における各点の座標のデータ(路上距離情報)、および、検出された対象物の座標(例えば車道Rとが接触している位置の座標)および車両Aまでの距離(対象物距離情報)を、判別ライン設定部22や対象物判定部23、記憶部25に送信する機能を有している。
【0033】
(判別ライン設定部22)
判別ライン設定部22は、距離算出部21から送信されるデータ(路上距離情報)と、撮影手段10が撮影した画像P(または事前処理画像PA)のデータとに基づいて、事前処理画像PA内に判別ラインDLを設定する機能を有するものである。
なお、画像Pのデータは、判別ライン設定部22に対して撮影手段10から直接データが送信されてもよいが、判別ライン設定部22が必要に応じて記憶部25から記憶されている画像Pのデータを読みだしてもよい。
【0034】
判別ライン設定部22によって設定される判別ラインDLは、事前処理画像PA内に車道Rと平行に設けられる線であり、事前処理画像PAにおいて、車両Aから所定の距離だけ離れた位置であって車道Rから所定の高さに相当する位置に設定される(図3(B)参照)。
【0035】
具体的には、判別ラインDLは、以下のようにして設定される。
まず、実空間において、撮影手段10から車道Rの走行方向に沿って所定の距離(図3(A)ではL1)だけ離れた位置(図3(A)では基準位置RSB)を設定する。ついで、基準位置RSBから車道Rの走行方向に沿って所定の距離(図3(A)ではRSL)だけ離れた位置(図3(A)では先端位置RST)を設定し、実空間において、撮影手段10と先端位置RSTとを結ぶ線分(図3(A)では線分DLA)を算出する。そして、実空間において、基準位置において車道Rと垂直に形成される面(評価面DS)を設定し、この評価面DSと線分DLAとが交差する交差点を求める。最後に、事前処理画像PAにおいてこの交差点と対応する点を算出し、この点を通り車道Rと平行な線を判別ラインDLとする。
実空間で設定された交差点から事前処理画像PAにおいてこの交差点と対応する点は対象物の下端の位置を画像上で特定する方法または下端の位置を推定する方法と同様の方法で算出することができる。
【0036】
なお、判別ラインDLは、事前処理画像PA上では、実質的に先端位置RSTを通る車道Rと平行な線と一致する。簡便な方法としては、先端位置RSTを通る車道Rと平行な線を事前処理画像PAに設定して、判別ラインDLとしてもよい。
また、判別ラインDLを上記のごとき方法で設定する理由は後述する。
【0037】
また、基準位置RSBおよび先端位置RSTは全ての画像Pにおいて共通のものを事前に設定してもよいし、各画像Pから抽出した対象物に基づいて、各画像毎に設定してもよい。共通の基準位置RSBおよび先端位置RSTを事前に設定する場合には、基準位置RSBおよび先端位置RSTは車両Aからの距離(図3におけるL1、L2)によって規定すれば、基準位置RSBおよび先端位置RSTに基づいて、評価面DSおよび線分DLAを求めることができるので、判別ラインDLを設定することができる。
また、各画像Pから抽出した対象物に基づいて、各画像毎に基準位置RSBおよび先端位置RSTを設定する場合には、距離算出部21によって算出された路上距離情報に基づいて、実空間に基準位置RSBおよび先端位置RSTを戻せば、上記方法によって判別ラインDLを設定することができる。
【0038】
また、判別ライン設定部22は、各事前処理画像PAについて設定された判別ラインDLのデータ(例えば、距離等、以下、判別ライン情報という)は、対象物判定部23や記憶部25に送信する機能を有している。
【0039】
(対象物判定部23)
対象物判定部23は、判別ライン設定部22から送信される判別ライン情報と、距離算出部21で算出された対象物距離情報に基づいて、距離算出部21において検出された対象物が立体物であるか平面物であるかを判別する機能を有するものである。
具体的には、対象物判定部23では、対象物と判別ラインDLとの相対的な位置に基づいて対象物が立体物であるか平面標識であるかを判別する。
【0040】
(立体物と平面標識の識別)
以下、対象物判定部23において、対象物が立体物であるか平面標識であるかを判別する方法を説明する。
【0041】
図3(B)に示すように車道Rに平面標識TMが描かれている場合には、図3(A)に示すように、平面標識TMにおいて最も車両Aに近い点を基準位置RSBとし、平面標識TMにおいて最も車両Aから遠い点を先端位置RSTとする。すると、事前処理画像PAに設定される判別ラインDLは、上述した方法によって、図3(B)のように設定される。つまり、事前処理画像PA上では、平面標識TMの先端を通るように判別ラインDLが設定される。
【0042】
ここで、図3(A)に示すように、基準位置RSBの位置に立体物SBが存在し、車両Aから基準位置RSBまでの距離と、車両Aから立体物SBと車道Rの接触点までの距離が同じ距離であるとする。すると、立体物SBがある程度の高さを有する場合には、事前処理画像PAにおいて、立体物SBの一部は判別ラインDLよりも上方にも存在する。つまり、立体物SBの高さが、基準位置RSBの位置における線分DLAの高さよりも高い場合には、立体物SBの一部は判別ラインDLよりも上方にも存在する。
【0043】
上記関係に基づけば、事前処理画像PA内において、対象物下端から車両Aまでの距離が基準位置RSBまでの距離と同じであって、事前処理画像PA内の対象物の一部が判別ラインDLよりも上方に位置する場合には、この対象物が立体物SBであると判断することができる。
一方、対象物下端から車両Aまでの距離が基準位置RSBまでの距離と同じであって、事前処理画像PA内の対象物の全体が判別ラインDLよりも下方に位置する場合には、この対象物が平面標識TMであると判断することができる。
【0044】
なお、対象物判定部23は上記の方法によって対象物が立体物SBであるか平面標識TMであるかを判断するので、判断する対象物は、原則、車両Aまでの距離が基準位置RSBの距離と同じものに限定される。
【0045】
また、対象物判定部23は、運転者に警告を発する警報装置やブレーキなどを作動させる運転制御装置などの衝突防止手段30などに接続されていてもよい。この場合、検出された対象物が立体物の場合には、対象物判定部23から衝突防止手段30に信号を発信するようにしておけば、走行判断部23からの信号を受信した衝突防止手段30がブザーを鳴らしたりインジケータを点滅させたりすることもできるし、衝突回避のためにブレーキなどを作動させることもできる。
【0046】
(本実施形態の衝突検出装置1の作用効果)
本実施形態の衝突検出装置1が、車両Aが車両前方に存在する他の車両や障害物等と衝突する可能性を検出する動作について説明する。
【0047】
以下では、衝突検出装置1において、車両Aから基準位置RSBまでの距離L1および車両Aから先端位置RSTまでの距離L2を予め設定する場合を説明する。
【0048】
まず、衝突検出装置1において、距離L1および距離L2を設定する。この状態で車両Aを走行させると、所定の時間毎に画像Pが撮影される。例えば、車両Aが60km/hで走行している場合には、画像Pは1/30秒間隔で撮影される。
【0049】
なお、画像Pを撮影する時間間隔は、走行速度に関わらず一定としてもよいが、車両Aの走行速度によって変化させる方が、他の車両や障害物等を適切に認識できるので、好ましい。例えば、ある画像Pを撮影してから次の画像Pを撮影するまでの車両Aの移動距離が1〜2m以下となるような間隔で測定することが好ましい。
【0050】
撮影された画像Pは、距離算出部21によって、画像Pから、車道Rおよび車道R上に存在する対象物が検出され、事前処理画像PAが形成される(図3(B)参照)。そして、事前処理画像PAを用いて、事前処理画像PA内の車道R上の各位置における実距離Lが算出されるとともに、検出された対象物から車両Aまでの距離も算出される。
【0051】
ついで、距離算出部21によって算出された実距離Lに基づいて、事前処理画像PAには判別ラインDLが設定される。そして、判別ラインDLが設定されると、車両Aまでの距離が距離L1と同じ対象物について、判別ラインDLとの相対的な位置が比較される。つまり、事前処理画像PA内において、対象物の上端の位置が判別ラインDLよりも上方に位置するか否かが判断される。
【0052】
そして、対象物の上端の位置が判別ラインDLよりも下方に位置すると判断された場合には、この対象物は平面標識TMであると認識され、つぎの画像Pについて処理が行われる。
【0053】
一方、対象物の上端の位置が判別ラインDLよりも上方に位置すると判断された場合には、この対象物は立体物SBであると判断される。すると、対象物判定部23から衝突防止手段30に信号が発信されるので、運転者に危険を知らせることができるし、自動的にブレーキを作動させて衝突を回避させることもできる。
【0054】
以上のごとく、本実施形態の衝突検出装置1によれば、事前処理画像PAにおいて、車道Rに存在する対象物と判別ラインDLとの相対的な位置を比較するだけで、対象物が立体物SBであるか平面標識TMであるかを判別することができる。
【0055】
しかも、対象物が立体物SBであるか平面標識TMであるかの判別は、各事前処理画像PAにおいて、車両Aからの距離が所定の距離、つまり、距離L1となっている対象物のみを対象とするので、判別を行う処理対象を少なくでき、判別処理を簡単かつ短時間で行うことができる。
【0056】
なお、上記例では、判別ラインDLとして、事前処理画像PAにおいて車道Rと平行な線を設定した。この場合には、判別ラインDLを設定する処理が容易である上、対象物の判別の際に、対象物の一部が判別ラインDLよりも上方に存在するか否かを判定するだけで判断できる。したがって、対象物が立体物SBであるか平面標識TMであるか判別する処理が非常に簡単となるし、その処理時間も短くすることができる。
しかし、判別ラインDLとして、事前処理画像PAにおいて車道Rと平行な線としなくてもよい。例えば、粗悪なレンズを使用した場合などでは、レンズのひずみを考慮した形状のラインを用いて計測してもよい。その場合には、システムに使用する機器の価格を抑えることができるので、システム全体の価格を抑えることができるという利点が得られる。
【0057】
また、上記例では、事前処理画像PAにおける無限遠点、つまり、車道Rの消失点DPを基準として、事前処理画像PA内の車道R上の各位置から車両Aまでの実距離Lおよび対象物から車両Aまでの間隔を求めた。この場合には、事前処理画像PAだけから実距離Lを求めることができるので、実距離Lおよび対象物から車両Aまでの間隔を、簡単かつ短時間で間隔を算出することができる。
しかし、対象物から車両までの間隔は、対象物に存在する寸法既知な部分(例えばナンバープレート)を検出することによって求めてもよい。すると、撮影されている部分の大きさと画像上での大きさとを比較すれば、対象物から車両までの間隔を算出することができる。その場合には、対象画像から下端を検出しなくても距離が計測できるという利点が得られる。
【0058】
(判別可能立体物高について)
また、判別ラインDLは、撮影手段10から基準位置RSBまでの距離L1、撮影手段10から先端位置RSTまでの距離L2(つまり、L1+DLA)、および車道Rから撮影手段10までの高さT1、によって変化する。例えば、車道Rから撮影手段10までの高さT1を1mで一定とし、基準位置RSBから先端位置RSTまでの距離DLAを5mで一定とした場合には、立体物SBとして判別できる高さは、以下のとおりである。
【表2】
【0059】
なお、表2から分かるように、上記方法によって、車道R上の全ての立体物SBを検出することは実質的に難しく、距離L1などの影響により、立体物SBとして判別できる高さが変化する。
例えば、表2に示すように、距離L1が長くなるほど、対象物を立体物SBとして判別できる高さが低くなるので、立体物SBを平面標識TMと誤認する可能性を低くできる。一方、距離L1が長くなるほど、車両Aの上下振動、計測誤差の影響を受けやすくなる。
また、距離DLAは、想定される平面標識TMのうち、最長のものに合わせることが好ましい。しかし、距離DLAが長くなると距離L2も長くなるので、立体物SBを平面標識TMと誤認する可能性は低くできる一方、車両Aの上下振動、計測誤差の影響を受けやすくなる。
さらに、車両Aによって、撮影手段10が取り付けられる高さT1が変化する。例えば、トラック等では高さT1が普通車の2倍近い高さとなる場合がある。高さT1は、低いほうが立体物SBを平面標識TMと誤認する可能性は低くできる一方、車両Aの上下振動、計測誤差の影響を受けやすくなる。
【0060】
以上のごとき事情があるので、判別ラインDLを設定する基準となるパラメータ、つまり、撮影手段10から基準位置RSBまでの距離L1、撮影手段10から先端位置RSTまでの距離L2、および車道Rから撮影手段10までの高さT1は、本実施形態の衝突検出装置1を搭載する車両Aの大きさや走行する道路状況等によって適宜設定することが好ましい。
【0061】
例えば、普通車であって、一般の公道を走行する場合であれば、距離L1を10m程度、距離L2を20m程度、高さT1を1m程度とすれば、平面標識TMを立体物SBと適切に識別することができる。
【0062】
(比率による方法)
また、上述した判別ラインDLを利用して立体物SBと平面標識TMとを識別する方法とともに、比率を利用した方法も使用して立体物SBと平面標識TMとを識別すれば、両者を識別する精度を高くすることができる。
【0063】
図4に示すように、対象物に対して車両Aが接近している場合には、対象物と車両Aとの距離が近づくにつれ、画像P内における対象物は大きくなる。
ここで、図4(A)は立体物SBの対象物に車両Aが接近している場合であり、図4(B)は平面標識TMの対象物に車両Aが接近している場合を示している。
【0064】
図4(A)に示すように、対象物が立体物SBの場合には、画像P内の対象物は、その幅Txとその高さTyの比率は一定の状態に維持される。
一方、図4(B)に示すように、対象物が平面標識TMの場合には、画像P内の対象物は、その幅Txとその高さTyの比率が変化し、幅Txの増加割合に比べて高さTyの増加割合が大きくなる。つまり、幅Txと高さTyの比率が変化する。
したがって、異なる時間に撮影された画像Pにおいて、対象物の幅Txと高さTyの比率を算出し、その変動を確認すれば、対象物が立体物SBであるか平面標識TMであるかを識別することができる。
【0065】
そして、ある画像Pにおいて、車両Aからの距離が所定の距離、つまり、距離L1となっている対象物について判別ラインLによる判別を行うとともに、その対象物の幅Txと高さTyの比率が現在の画像Pまでにどのように変動したかを確認すれば、判別ラインLと比率の両方で立体物SBと平面標識TMとを識別することができる。すると、判別ラインLだけによる判別よりも、より正確な識別を行うことができる。
【0066】
しかも、各画像Pについて、対象物の幅Tx(図4では水平方向長さ)および高さTy(図4では垂直方向長さ)を算出し、その比を算出するだけであるから、画像処理および判別に要する時間は短くできる。したがって、両方法による判別を行なっても、判別時間が長くなることを防ぐことができる。
【0067】
(他の実施例)
上記例では、判別ラインLを一本だけ設定する場合を説明したが、判別ラインLは複数本設定してもよい。この場合、同一の対象物を複数判別することもできるので、識別ミスを防ぐことができる。また、一枚の画像Pで、異なる距離に存在する複数の対象物の識別を同時に行うことも可能となる。
【産業上の利用可能性】
【0068】
本発明の衝突検出装置は、車両に搭載され、前方に存在する障害物などを検出する装置として適している。
【符号の説明】
【0069】
1 衝突検出装置
10 撮影手段
20 路上対象物検出手段
21 距離算出部
22 判別ライン設定部
23 対象物判定部
DL 判別ライン
A 車両
P 画像
R 車道
SB 立体物
TM 平面標識
【特許請求の範囲】
【請求項1】
車両に搭載された、該車両前方を撮影する撮影手段と、
該撮影手段によって撮影された画像に基づいて路上に存在する対象物を検出する路上対象物検出手段と、を備えており、
前記路上対象物検出手段は、
前記撮影手段によって撮影された画像に基づいて、前記対象物から前記車両までの間隔を算出する距離算出部と、
前記撮影手段によって撮影された画像において、前記対象物が立体物であるか平面標識であるかを判別する基準となる判別ラインを設定する判別ライン設定部と、
前記間隔が所定の距離となっている前記対象物について、前記判別ラインとの相対的な位置に基づいて立体物であるか平面標識であるかを判別する対象物判定部と、を備えている
ことを特徴とする衝突検出装置。
【請求項2】
前記判別ライン設定部によって設定される判別ラインが、路面と平行な水平線であり、
前記対象物判定部は、
前記対象物の一部が前記判別ラインよりも上方に存在するか否かに基づいて該対象物が立体物であるか平面標識であるかを判別する機能を有している
ことを特徴とする請求項1記載の衝突検出装置。
【請求項3】
前記距離算出部は、
前記画像における無限遠点の位置に基づいて前記間隔を算出するものである
ことを特徴とする請求項1または2記載の衝突検出装置。
【請求項4】
前記撮影手段が、時間連続的に画像を撮影するものであり、
前記対象物判定部は、
前記時間連続的に撮影された複数枚の画像において、該複数枚の画像中に存在する同一対象物の水平方向長さおよび垂直方向長さを算出し、
各画像で得られた水平方向長さと垂直方向長さの比の変化に基づいて該対象物が立体物であるか平面標識であるかを判別する機能を有している
ことを特徴とする請求項1、2または3記載の衝突検出装置。
【請求項1】
車両に搭載された、該車両前方を撮影する撮影手段と、
該撮影手段によって撮影された画像に基づいて路上に存在する対象物を検出する路上対象物検出手段と、を備えており、
前記路上対象物検出手段は、
前記撮影手段によって撮影された画像に基づいて、前記対象物から前記車両までの間隔を算出する距離算出部と、
前記撮影手段によって撮影された画像において、前記対象物が立体物であるか平面標識であるかを判別する基準となる判別ラインを設定する判別ライン設定部と、
前記間隔が所定の距離となっている前記対象物について、前記判別ラインとの相対的な位置に基づいて立体物であるか平面標識であるかを判別する対象物判定部と、を備えている
ことを特徴とする衝突検出装置。
【請求項2】
前記判別ライン設定部によって設定される判別ラインが、路面と平行な水平線であり、
前記対象物判定部は、
前記対象物の一部が前記判別ラインよりも上方に存在するか否かに基づいて該対象物が立体物であるか平面標識であるかを判別する機能を有している
ことを特徴とする請求項1記載の衝突検出装置。
【請求項3】
前記距離算出部は、
前記画像における無限遠点の位置に基づいて前記間隔を算出するものである
ことを特徴とする請求項1または2記載の衝突検出装置。
【請求項4】
前記撮影手段が、時間連続的に画像を撮影するものであり、
前記対象物判定部は、
前記時間連続的に撮影された複数枚の画像において、該複数枚の画像中に存在する同一対象物の水平方向長さおよび垂直方向長さを算出し、
各画像で得られた水平方向長さと垂直方向長さの比の変化に基づいて該対象物が立体物であるか平面標識であるかを判別する機能を有している
ことを特徴とする請求項1、2または3記載の衝突検出装置。
【図1】

【図4】
【図2】
【図3】
【図4】
【図2】
【図3】
【公開番号】特開2013−114585(P2013−114585A)
【公開日】平成25年6月10日(2013.6.10)
【国際特許分類】
【出願番号】特願2011−262392(P2011−262392)
【出願日】平成23年11月30日(2011.11.30)
【出願人】(599016785)株式会社シーマイクロ (4)
【Fターム(参考)】
【公開日】平成25年6月10日(2013.6.10)
【国際特許分類】
【出願日】平成23年11月30日(2011.11.30)
【出願人】(599016785)株式会社シーマイクロ (4)
【Fターム(参考)】
[ Back to top ]