
衝突検知手段および保護システム
【課題】歪み検出手段の出力信号の極性が安定した衝突検知手段を提供すること。
【解決手段】本発明の衝突検知手段は、バンパリンフォースメント1と、サイドメンバ2またはクラッシュボックス3である側方支持部材と、側方支持部材に生じる歪みを検出する歪み検出手段4と、歪み検出手段4が固定される本体部50と、車両前後方向に延在する略板形状を有し歪み検出手段が固定される本体部と、本体部50にもうけられバンパリンフォースメント1または側方支持部材に固定される一の固定部52と、本体部50にもうけられ側方支持部材に固定される他の固定部52と、を有する起歪体5と、を有する衝突検知手段において、本体部50は、車両前後方向または車両前後方向に垂直な面で切った断面が車両の上下方向に非対称な形状となるように形成されていることを特徴とする。
【解決手段】本発明の衝突検知手段は、バンパリンフォースメント1と、サイドメンバ2またはクラッシュボックス3である側方支持部材と、側方支持部材に生じる歪みを検出する歪み検出手段4と、歪み検出手段4が固定される本体部50と、車両前後方向に延在する略板形状を有し歪み検出手段が固定される本体部と、本体部50にもうけられバンパリンフォースメント1または側方支持部材に固定される一の固定部52と、本体部50にもうけられ側方支持部材に固定される他の固定部52と、を有する起歪体5と、を有する衝突検知手段において、本体部50は、車両前後方向または車両前後方向に垂直な面で切った断面が車両の上下方向に非対称な形状となるように形成されていることを特徴とする。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両が物体に衝突したことを検知する衝突検知手段に関し、詳しくは、車両と歩行者の衝突を検知する衝突検知手段に関する。
【背景技術】
【0002】
近年、車両において事故時の安全性の向上が図られている。車両の安全性に関して、事故時に車両の搭乗者の安全性を確保するだけでなく、車両に歩行者が衝突したときに歩行者が致命的なダメージを受けないことも求められてきている。
【0003】
車両に衝突した歩行者の保護装置としては、車両に衝突してボンネットに倒れ込んできた歩行者が受ける傷害値(歩行者が受ける衝撃)を下げる種々の装置が考えられている。歩行者が受ける衝撃を下げることで、歩行者が致命的なダメージを受けることを抑える。このような保護装置において歩行者などの車両への衝突を検知することが重要となっている。
【0004】
車両への衝突を検知する装置としては、たとえば、ワイヤー、応力センサ、光ファイバをフロントバンパに組み付け、ワイヤーの張力変化、応力センサの出力信号、光ファイバを流れる光の減衰などから、衝突を検知する装置がある。
【0005】
しかしながら、これらの装置は、フロントバンパに沿ってワイヤー、応力センサ、光ファイバを設置する必要があり、配置スペースの拡大化や配置構造の複雑化を招いていた。つまり、組み付け性の低下や組み付けコストの上昇があった。
【0006】
このような問題に対して、車両が元々備えているサイドメンバまたはクラッシュボックスが衝突時に変形を生じることに着目した衝突検知手段が開発されている。この衝突検知手段は、図2に示したように、車両左右方向に延在するように配置されたバンパリンフォースメント1と、バンパリンフォースメント1に結合して車両前後方向に延在するように配置されるサイドメンバ2またはクラッシュボックス3である側方支持部材と、側方支持部材に生じる歪みを検出する歪み検出手段4と、を備えた構成を有している。
【0007】
この衝突検知手段は、衝突により側方支持部材が歪みを生じたときに、この歪みを歪み検出手段が検出して衝突を検知する。
【0008】
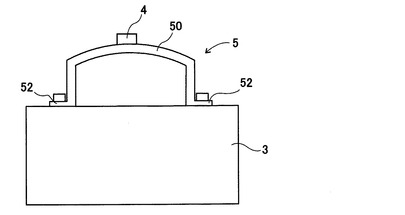
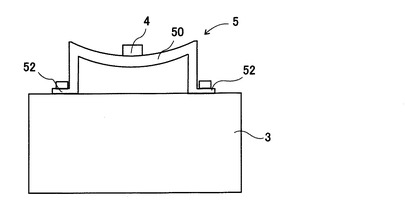
しかしながら、このような構成の衝突検知手段は、歪み検出手段の出力信号の極性が一定ではないという問題があった。具体的には、この衝突検知手段は、両端が側方支持部材に固定された起歪体5上に歪み検出手段4が固定されている。そして、側方支持部材に歪みが生じると、起歪体5にも歪みが生じ、起歪体5上に固定された歪み検知手段4が歪みを検知する。起歪体5の歪み検出手段4が固定された部分50は板状であり、起歪体5の両端の固定部52,52の距離が短くなる方向の応力が加わったときには、歪み検出手段4が固定された表面が凸(図16)あるいは凹(図17)となる方向に変形(湾曲)を生じる。つまり、歪み検知手段4が固定された部分の表面が図16に示したように凸となるように変形を生じたとき(引っ張り応力が発生するとき)に歪み検出手段が正の出力信号を発するように設定すると、図17に示したように凹となるように変形を生じたとき(圧縮応力が発生するとき)には負の出力信号を発することとなる。
【発明の開示】
【発明が解決しようとする課題】
【0009】
本発明は上記実情に鑑みてなされたものであり、歪み検出手段の出力信号の極性が安定した衝突検知手段を提供することを課題とする。
【課題を解決するための手段】
【0010】
上記課題を解決するために本発明者は車両へ組み付けることができる衝突検知手段について検討を重ねた結果本発明をなすに至った。
【0011】
すなわち、本発明の衝突検知手段は、車両左右方向に延在するように配置されたバンパリンフォースメントと、バンパリンフォースメントに結合して車両前後方向に延在するように配置されるサイドメンバまたはクラッシュボックスである側方支持部材と、側方支持部材に生じる歪みを検出する歪み検出手段と、車両前後方向に延在する略板形状を有し歪み検出手段が固定される本体部と、本体部にもうけられバンパリンフォースメントまたは側方支持部材に固定される一の固定部と、本体部にもうけられ側方支持部材に固定される他の固定部と、を有する起歪体と、を有する衝突検知手段において、本体部は、車両前後方向または車両前後方向に垂直な面で切った断面が車両の上下方向に非対称な形状となるように形成されていることを特徴とする。
【0012】
また、本発明の保護システムは、請求項1〜4のいずれかに記載の衝突検知手段と、衝突検知手段が組み付けられた車両と歩行者の衝突時に、歩行者を保護する保護手段と、衝突検知手段の出力信号が入力され、出力信号に基づいて衝突物の判定を行う衝突判定手段と、衝突判定手段が衝突物が歩行者であると判定したときに保護手段を作動させる起動手段と、を有することを特徴とする。
【発明の効果】
【0013】
本発明の衝突検知手段は、衝突時に側方支持部材に生じた歪みを検出することで衝突を検出する。そして、本発明の衝突検知手段は、歪みを検出する歪み検出手段が、固定された起歪体の本体部の断面形状を調節することで、本体部の変形方向が一定となっている。これにより、本体部の変形方向が一定となり、歪み検出手段には一定の方向の応力が加わることとなり、出力信号の極性が安定する。この結果、衝突の検知精度が向上する。
【0014】
本発明の保護システムは、上記の衝突検知手段を用いた保護システムである。つまり、衝突の検知精度に優れた衝突検知手段を用いており、誤検知による誤作動が抑えられた保護システムとなっている。
【発明を実施するための最良の形態】
【0015】
(衝突検知手段)
本発明の衝突検知手段は、車両左右方向に延在するように配置されたバンパリンフォースメントと、バンパリンフォースメントに結合して車両前後方向に延在するように配置されるサイドメンバまたはクラッシュボックスである側方支持部材と、側方支持部材に生じる歪みを検出する歪み検出手段と、車両前後方向に延在する略板形状を有し歪み検出手段が固定される本体部と、本体部にもうけられバンパリンフォースメントまたは側方支持部材に固定される一の固定部と、本体部にもうけられ側方支持部材に固定される他の固定部と、を有する起歪体と、を有する衝突検知手段である。本発明の衝突検知手段は、衝突時に側方支持部材に生じた歪みを歪み検出手段で検出することで衝突を検出する。
【0016】
本発明の衝突検知手段は、このような構成となることで、フロントバンパに沿って衝突検知用の部材を新たに配置する必要がないので、配置スペースの拡大化および配置構造の複雑化を抑制することができる。
【0017】
そして、本発明の衝突検知手段においては、歪み検出手段は、バンパリンフォースメントまたは側方支持部材に直接固定されるのではなく、バンパリンフォースメントまたは側方支持部材に固定された起歪体に固定されている。このような構成となることで、側方支持部材やバンパリンフォースメントを組み付けた後に歪み検知手段を組み付けることができ、組み付け性が向上する。また、起歪体を介して歪み検出手段を固定することで、歪み検出手段を正確な位置に固定することができる。
【0018】
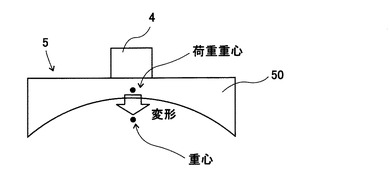
そして、起歪体の本体部は、車両前後方向または車両前後方向に垂直な面で切った断面が車両の上下方向に非対称な形状となるように形成されている。本体部が車両の上下方向に非対称な形状となる断面形状をなすように形成されたことで、帯状の長手方向(車両の前後方向)に圧縮する応力が働いたときに、本体部の変形する方向(湾曲方向)が一定となる。具体的には、本体部の断面形状において、互いに背向する一方の表面と他方の表面がその重心に対して非対称をなす形状となると、本体部の断面の重心と歪みによる荷重重心とにズレが生じる。そして、本体部に荷重が加わったときに、荷重重心が重心(断面の重心)に一致するように本体部が変形を生じる。つまり、本体部は、一定の方向のみに変形を生じる。本発明の衝突検知手段は、本体部の表面を非対称に形成することで重心と荷重重心のズレを形成しており、本体部の変形方向が一定方向に規制されている。この結果、本発明の衝突検知手段は、本体部の歪みの生じる方向が一定となり、本体部に固定された歪み検出手段には一方向の歪みが検出される。すなわち、本発明の衝突検知手段は、本体部に固定された歪み検出手段の出力信号の極性が一定となり、衝突の検知精度が向上した。
【0019】
本発明の衝突検知手段においては、車両前後方向に垂直な面で切った断面が車両の上下方向に非対称な形状となることで本体部が変形する方向を規制しているが、非対称な形状を区画する表面の形状により変形する方向が決定する。ここで、本発明において、衝突時に本体部の変形する方向は特に限定されるものではない。たとえば、本体部の断面形状において一方の表面または他方の表面が凹状にくぼんだ形状をなしているときには、重心位置が、くぼんでいない表面からくぼんだ表面方向に移動する。具体的には、断面が方形の平板状の部材においては、この部材の重心は対角線の交差する位置にある。これに対し、一方の表面がくぼんだ略凹レンズ状をなす場合には、略凹レンズの形状は、平板状の部材の一方の表面の両端部が突出した形状と考えられる。この場合、突出した部分に対応して重心位置が移動する。
【0020】
起歪体の本体部は、車両前後方向に沿った面で切った断面が、バンパリンフォースメントまたは側方支持部材に対向する一方の表面、または一方の表面に背向する他方の表面が、背向する表面方向にくぼんだ凹をなす断面形状を有することが好ましい。ここで、表面が凹をなすとは、本体部の断面形状が、略凹レンズ状の湾曲面がなす形状を示す。このような形状になることで、本体部の重心位置が凹をなした表面に背向する表面から移動する。これにより、変形方向が規制される。このとき、凹状をなした表面に背向する表面(一方の表面に凹状が形成されたときの他方の表面,他方の表面に凹状が形成されたときの一方の表面)は、凹状をなした表面にそった湾曲形状をなしても、平面を形成してもいずれでもよい。
【0021】
互いに背向する表面の一方の表面または他方の表面が背向する表面方向にくぼんだ凹をなすときの、凹状のくぼみの具体的な形状は、その表面において幅方向の両端部が最も突出している形状であればよく、その断面が滑らかに変化する略U字状であっても、角部をもつ略コ字状であっても、いずれでもよい。起歪体の本体部は、車両前後方向に垂直な面で切った断面形状が略コ字状をなすように形成されたことが好ましい。
【0022】
起歪体の本体部は、車両前後方向に沿った面で切った断面が、前記バンパリンフォースメントまたは前記側方支持部材に対向する一方の表面、または該一方の表面に背向する他方の表面が、背向する表面方向にくぼんだ凹をなす断面形状を有することが好ましい。車両の前後方向の断面(帯状の本体部の長手方向での断面)においても同様に、一方または他方の表面が凹をなす形状に形成しても、上記の車両の前後方向に垂直な断面のときと同様に歪みの変形方向を規制することができる。
【0023】
本発明の衝突検知手段において、起歪体は、車両前後方向に延在する略板形状を有し歪み検出手段が固定される本体部と、本体部にもうけられバンパリンフォースメントまたは側方支持部材に固定される一の固定部と、本体部にもうけられ側方支持部材に固定される他の固定部と、を有する構成であれば、その具体的な形状は限定されるものではない。たとえば、本体部が側方支持部材に密着した状態(一対の固定部と本体部とが平板状をなす形態)であっても、本体部が側方支持部材から間隔を隔てて保持された状態(一対の固定部と本体部とが略コ字状をなす形態)であっても、いずれでもよい。ここで、本体部が側方支持部材に密着した状態であるときには、本体部は、側方支持部材から離反する方向に変形するように設計される。
【0024】
本発明の衝突検知手段において、バンパリンフォースメント、側方支持部材及び歪み検出手段は、従来の衝突検知手段に用いられた部材を使用することができる。
【0025】
歪み検出手段は、起歪体の本体部に固定され、本体部の歪みを検出することができる手段であればよく、従来公知の歪みゲージなどを用いることができる。
【0026】
側方支持部材は、サイドメンバまたはクラッシュボックスであり、車両がサイドメンバまたはクラッシュボックスをもつ場合には、いずれか一方であればよい。ここで、クラッシュボックスは、車両と物体が衝突を生じた時のエネルギーを吸収する部材である。
【0027】
本発明の衝突検知手段においては、側方支持部材は、車両前後方向の強度が相対的に高い部位と低い部位とを備え、歪み検出手段は側方支持部材のうち車両前後方向の強度が低い部位の歪みを検出することが好ましい。この車両前後方向の強度が低い部位が上記の衝突時に変形を生じる部分に対応する。
【0028】
サイドメンバまたはクラッシュボックスは、一般的に剛性が高く、歩行者などの衝突においてはその歪み量が小さく、歪みの検出が容易ではない。そこで、側方支持部材が、車両の前後方向の強度が相対的に高い部位と低い部位とを備えるようにすることで、車両が物体に衝突した場合に、側方支持部材のうち車両前後方向の強度が相対的に低い部位には、応力が集中する。その結果、側方支持部材のうち車両前後方向の強度が相対的に低い部位に生じる応力は、側方支持部材のうち車両前後方向の強度が相対的に高い部位に生じる応力に比べて、大きくなる。そして、圧縮応力が大きいほど、歪み量が大きくなる。
【0029】
つまり、車両が物体に衝突したときに受ける衝撃荷重が小さい場合であっても、側方支持部材のうち車両前後方向の強度が相対的に低い部位に生じる歪みは、歪み検出手段により十分に検出できる程度に大きくすることができる。従って、このように側方支持部材のうち車両前後方向の強度が相対的に低い部位に生じる歪みを用いることで、車両が物体に衝突したときに車両が受ける衝突荷重が小さい場合であっても、車両が物体に衝突したことを確実に検知することができる。
【0030】
本発明の衝突検知手段は、歪み検出手段の出力信号が入力され、入力された出力信号から衝突の判定を行う演算手段を有することが好ましい。演算手段による判定は、従来公知の判定方法を用いて行うことができる。演算手段には、車速センサ等の出力信号が入力され、これらの出力信号も参照して判定を行うことができる。なお、演算手段は、ひとつの演算手段で衝突の判定を行っても、複数の演算手段を組み合わせて衝突の判定を行っても、いずれでもよい。
【0031】
本発明の衝突検知手段において演算手段は、歪み検出手段の出力信号から衝突物の衝突位置や衝突物の種類を判定することが好ましい。衝突物の衝突位置や衝突物の種類を判定することで、衝突物や乗員に有効な保護システムを動作させることができる。
【0032】
本発明の衝突検知手段は、エアバッグなどの乗員保護システムや歩行者を保護する歩行者保護システムに利用することができる。本発明の衝突検知手段が保護システムの一部をなすときには、演算手段の判定結果から、エアバッグ等の保護手段を作動させることで、乗員や歩行者を保護することができる。また、演算手段がエアバッグ等の保護手段を作動させる作動信号を発することが好ましい。
【0033】
(保護システム)
本発明の保護システムは、請求項1〜4のいずれかに記載の衝突検知手段と、衝突検知手段が組み付けられた車両と歩行者の衝突時に、歩行者を保護する保護手段と、衝突検知手段の出力信号が入力され、出力信号に基づいて衝突物の判定を行う衝突判定手段と、衝突判定手段が衝突物が歩行者であると判定したときに保護手段を作動させる起動手段と、を有することを特徴とする。
【0034】
本発明の保護システムは、請求項1〜4に記載の衝突検知手段を用いた保護システムである。本発明の保護システムは、衝突検知手段(の歪み検出手段)が歩行者の衝突時の側方支持部材の歪みを検出し、出力信号を発する。上記したように、この出力信号の極性は一定であり、極性の反転による誤検知が発生しなくなっている。
【0035】
歪み検出手段の出力信号は衝突判定手段に入力され、衝突物が歩行者であるか否かの判定を行う。衝突判定手段における衝突物の判定は、従来公知の判定方法を用いることができる。
【0036】
衝突判定手段において衝突物が歩行者であると判定したときには、判定結果から起動手段が保護手段を起動するための起動信号を保護手段に送信する。本発明において、衝突判定手段と起動手段とはひとつの演算装置(ECUなど)であってもよい。
【0037】
起動信号を受信した保護手段は、稼働し、歩行者を保護する。保護手段は、エアバック等の従来公知の保護手段である。
【実施例】
【0038】
以下、実施例を用いて本発明を説明する。
【0039】
本発明の実施例として、車両のバンパに設置された衝突検知手段を製造した。
【0040】
(実施例1)
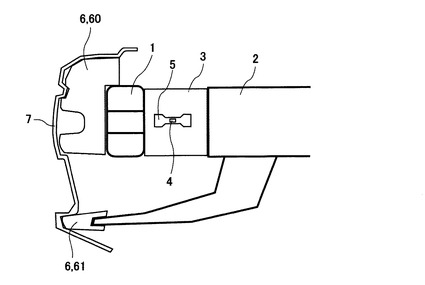
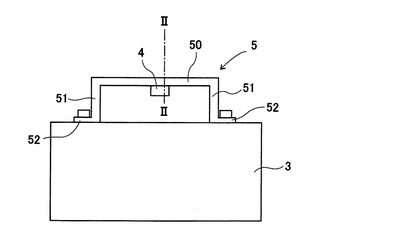
本実施例の衝突検知手段は、バンパリンフォースメント1、サイドメンバ2、クラッシュボックス3、歪みゲージ4、起歪体5、バンパアブソーバ6、バンパカバー7および演算手段(図示せず)を有する。本実施例の衝突検知手段の構成を図1〜2に示した。なお、図1は衝突検知手段全体の構成を、図2はクラッシュボックス3の近傍の構成を示した図である。
【0041】
バンパリンフォースメント1は、車両の幅方向にそって延在する金属製の部材である。バンパリンフォースメント1は、車両のフレームの一部を構成する構造部材である。本実施例においては、バンパリンフォースメント1は、内部中央に二段の梁が設けられた断面が略目字状を有する中空部材からなる。バンパリンフォースメント1は、一対のサイドメンバ2にクラッシュボックス3を介して固定される。バンパリンフォースメント1が固定される車両のサイドメンバ2は、車両のエンジンルームの前方に突出した一対の部材である。
【0042】
サイドメンバ2は、バンパリンフォースメント1の車両左右方向の両端部から車両後方に延在するように、それぞれ配置されている。このサイドメンバ2は、バンパリンフォースメント1と同様に車両フレームの一部を構成する構造部材である。サイドメンバ2は、たとえば、車両前後方向に垂直な断面が矩形状からなる中空部材からなる。
【0043】
クラッシュボックス3は、車両前方が衝突物に衝突したときのエネルギーを吸収する部材である。クラッシュボックス3は、バンパリンフォースメント1とサイドメンバ2との間に介在するように配置されている。クラッシュボックス3は、サイドメンバ2と同様に、車両前後方向に垂直な断面が矩形状からなる中空部材である。
【0044】
歪みゲージ4は、起歪体5上に固定された状態でクラッシュボックス3に固定されている。歪みゲージ4は、クラッシュボックス3の歪みを起歪体5の歪みとして検出する。
【0045】
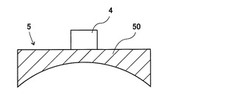
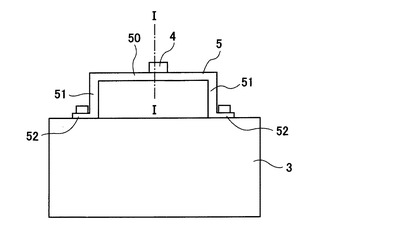
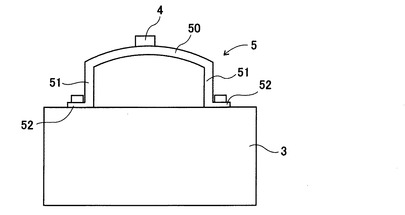
起歪体5は、車両前後方向での断面が略コ字状を有するように帯状の金属板を曲成してなる部材である。起歪体5は、車両前後方向に伸びた状態で固定されている。起歪体5は、略コ字状の長手方向の中央部が本体部50をなし、本体部50の長手方向の両端に本体部50から垂直にのびる脚部51,51が形成されている。そして、起歪体5の略コ字状の底部よりなる本体50の外表面(クラッシュボックス3に対向する内表面に背向した表面)に歪みゲージ4が固定されている。この本体部50は、車両の前後方向での中央部の近傍の帯状の幅が他の部分(脚部51、フランジ52など)よりも短くなるように形成されている。そして、起歪体5は、略コ字状の開口端(脚部51,51の本体部50と反対の端部)からそれぞれ外側に広がるようにフランジ52,52を有している。起歪体5は、フランジ52,52およびクラッシュボックス3を貫通したねじ59でねじ止めして固定される。
【0046】
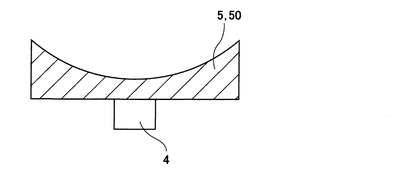
起歪体5の本体部50は、帯状の幅方向での断面(車両の上下方向での断面)が図3に示したように、外表面が直線を、クラッシュボックス3に対向した内表面がなめらかにくぼんだ形状(略凹レンズ状)に形成されている。つまり、本体部50は、車両の上下方向での断面が非対称な形状に形成されている。外表面と内表面とが非対称をなすように形成されたことで、クラッシュボックス3に歪み(車両前後方向に圧縮する歪み)が生じたときに、本体部50は内表面方向(クラッシュボックス3)方向に湾曲して変形するようになる。なお、図3は、図2中のI−I断面における断面図である。
【0047】
バンパアブソーバ6は、バンパリンフォースメント1の車両前面に配置された部材である。バンパアブソーバ6は、車両の左右方向に延在する部材であり、車両前方からの衝撃を吸収する部材である。本実施例においては、バンパアブソーバ6は、車両の上下方向の上方に位置するアッパーアブソーバ60と、アッパーアブソーバ60の下方に位置するロアーアブソーバ61と、からなる。
【0048】
バンパカバー7は、車両の最前面に配され、バンパアブソーバ6の車両前面を被覆する部材である。通常、車両に衝突物が衝突したときには、このバンパカバー7が衝突する。
【0049】
演算手段は、歪みゲージ4に接続され、歪みゲージ4により検出された歪みに基づいて、衝突の検知(判定)を行う。演算手段においての衝突の検知は従来公知の判定方法で判定することができ、たとえば、検出された歪み量があらかじめ設定されたしきい値よりも大きくなった場合に衝突と判定することができる。ここで、演算手段は、あらかじめ車両に搭載された演算手段としてもよい。好ましくは、乗員保護装置や歩行者保護装置の演算手段である。
【0050】
本実施例の衝突検知手段による衝突の検知について以下に説明する。
【0051】
この車両のバンパに衝突物が衝突すると、衝突物が車両のバンパを押圧することとなる。衝突物は、車両のバンパのバンパーカバー7を介してバンパアブソーバ6を押圧する。バンパアブソーバ6は、衝突物が衝突した衝撃の一部を吸収するとともにバンパリンフォースメント1を押圧する。
【0052】
押圧されたバンパリンフォースメント1は、その衝撃の一部を吸収するとともにクラッシュボックス3を押圧する。押圧されたクラッシュボックス3は、車両前後方向に圧縮される変形を生じる。つまり、クラッシュボックス3に車両前後方向の歪みが生じる。
【0053】
クラッシュボックス3に歪みが生じると、クラッシュボックス3に固定された起歪体5のフランジ52,52間の距離も短くなる。つまり、起歪体5が車両前後方向に圧縮される。起歪体5に車両前後方向(帯の長手方向)で圧縮する応力が加わると、本体部50近傍に歪みが生じる。これは、本体部50近傍は端部51近傍よりも帯の幅が短く形成されていることから、応力が集中することによる。
【0054】
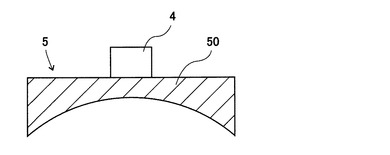
本体部50は、外表面と内表面とが非対称をなすように形成されており、本体部50の重心が図4に示したように内表面の表面から外側に位置している。そして、本体部50に集中した応力は、図4に示した荷重重心に集中する。図4に示したように、本体部50の重心と荷重重心とは一致しておらず、本体部50に集中した荷重重心が本体部50の重心と一致する方向(クラッシュボックス3方向)に本体部50が変形(湾曲)する。このことから、本体部50がクラッシュボックス3に近接する方向に湾曲し、クラッシュボックス3から離反する方向に変形しなくなっている。すなわち、本体部50の変形方向がひとつの方向に規制されている。
【0055】
この本体部50の変形を、歪みゲージ4で検出する。上記したように、本体部50の変形方向が規制されたことで、歪みゲージ4には、常に、圧縮する方向の応力が働く。つまり、歪みゲージ4は、圧縮する方向の歪みのみを検知する。この結果、歪みゲージ4は、圧縮方向のみの出力信号を出力する。圧縮信号のみの出力信号は、その極性が一定である。
【0056】
上記したように、本実施例の衝突検知手段は、歪みゲージ4が固定された起歪体5の本体部50の変形方向が一定となっており、歪みゲージ4が測定する本体部50の歪みの方向が一定に規制されている。つまり、本実施例の衝突検知手段は、歪みゲージ4の出力信号の正負の方向が一定となり、検出誤差が生じにくくなっている。つまり、本実施例の衝突検知手段は、検出精度にすぐれた衝突検知手段となっている。
【0057】
本実施例および以下の実施例2〜9の衝突検知手段は、衝突時に歩行者を保護する歩行者保護システムに用いることができる。
【0058】
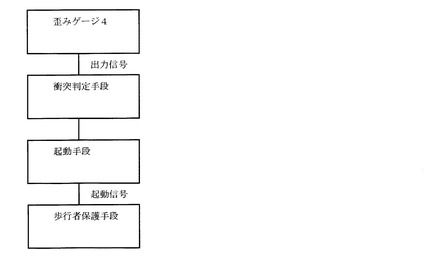
歩行者保護システムは、衝突検知手段と、衝突検知手段の歪みゲージ4の出力信号が入力され出力信号に基づいて衝突物の判定を行う衝突判定手段と、衝突判定手段が衝突物が歩行者であると判定したときに保護手段を作動させる起動手段と、衝突検知手段が組み付けられた車両と歩行者の衝突時に、歩行者を保護する歩行者保護手段と、を備えている。この保護システムの構成を図5に示した。
【0059】
まず、歪みゲージ4で検知された歪みは衝突判定手段に送信される。衝突判定手段は、歪みゲージ4の検出結果から衝突物が衝突したと検知したときには、衝突物が歩行者か否かの判定を行う。衝突判定手段における判定は、たとえば、以下のようにして行うことができる。まず、衝突物が衝突したか否かの判定を行い、衝突物が衝突したと検知したときには、歪みゲージ4の出力信号から衝突荷重を算出する。ここで、衝突荷重は、歪みゲージ4において検出される歪みに対して線形性を有する。
【0060】
そして、算出された衝突荷重と、車速センサ(図示せず)により検出される車速と、に基づいて、衝突物の質量を算出する。衝突荷重と車速とから衝突物の質量を算出する方法は、従来公知の方法を用いることができ、衝突荷重の一回積分値と車速を用いて質量を算出する方法を用いることができる。
【0061】
そして、衝突判定手段は、衝突物の質量から衝突物の種類の判定を行う。たとえば、衝突物の質量が所定の範囲内であるときには歩行者と判定し、所定範囲よりも大きい場合には建築物や別の車両などと判定する。
【0062】
そして、衝突物が歩行者と判定したときには、起動手段が歩行者保護手段を起動させる起動信号を発する。起動信号を受信した歩行者保護手段が作動し、歩行者を保護する。
【0063】
歩行者保護手段は、車両のフードに搭載され歩行者が衝突したときに歩行者を保護する装置であり、たとえば、フードの跳ね上げを行う装置や、フード状に展開するエアバッグ装置などである。歩行者保護手段が作動することで、車両とに衝突した歩行者がうける傷害値を低減する。
【0064】
(実施例2)
本実施例は、起歪体5の本体部50の断面形状が異なる以外は、実施例1と同様な構成の衝突検知手段である。
【0065】
本実施例の起歪体5の本体部50は、帯状の幅方向での断面(車両の上下方向での断面)が図6に示したように、クラッシュボックス3に対向した内表面がなめらかにくぼんだ形状に形成されている。この内表面の形状は、実施例1の本体部50の内表面の形状と一致する形状である。そして、外表面も内表面の湾曲形状にそった湾曲形状に形成されている。つまり、起歪体5の本体部50は、帯状の幅方向での断面が弧状をなすように形成されている。本体部50は、車両の上下方向での断面が非対称な形状に形成されている。本実施例の起歪体5の断面を示した図6は、実施例1の起歪体5の本体部50の断面を示した図3に対応した断面図である。
【0066】
本実施例においても、実施例1の時と同様に、歪みゲージ4が固定された起歪体5の本体部50の変形方向が一定となっており、歪みゲージ4が測定する本体部50の歪みの方向が一定に規制されている。つまり、本実施例の衝突検知手段は、歪みゲージ4の出力信号の正負の方向が一定となり、検出誤差が生じにくくなっている。つまり、本実施例の衝突検知手段は、検出精度にすぐれた衝突検知手段となっている。
【0067】
(実施例3)
本実施例は、起歪体5の本体部50の断面形状が異なる以外は、実施例1と同様な構成の衝突検知手段である。
【0068】
本実施例の起歪体5の本体部50は、帯状の幅方向での断面(車両の上下方向での断面)が図7に示したように、帯状の幅方向で金属板を略コ字状に曲成してなる構成を有している。そして、本体部50は、略コ字状の開口端部がクラッシュボックス3側に位置している。本体部50は、車両の上下方向での断面が非対称な形状に形成されている。本実施例の起歪体5の断面を示した図7は、実施例1の起歪体5の本体部50の断面を示した図3に対応した断面図である。
【0069】
本実施例においても、実施例1の時と同様に、歪みゲージ4が固定された起歪体5の本体部50の変形方向が一定となっており、歪みゲージ4が測定する本体部50の歪みの方向が一定に規制されている。つまり、本実施例の衝突検知手段は、歪みゲージ4の出力信号の正負の方向が一定となり、検出誤差が生じにくくなっている。つまり、本実施例の衝突検知手段は、検出精度にすぐれた衝突検知手段となっている。
【0070】
(実施例4)
本実施例は、起歪体5の本体部50の断面形状が異なるとともに歪みゲージ4が内表面に固定した以外は、実施例1と同様な構成の衝突検知手段である。本実施例の起歪体5の構成を図8〜9に示した。本実施例の起歪体5の構成を示した図8は、実施例1の図2に対応した図であり、図9は図8中のII−II断面における断面図である。
【0071】
本実施例の起歪体5の本体部50は、帯状の幅方向での断面(車両の上下方向での断面)が図9に断面を示したように、クラッシュボックス3に対向した内表面が平面をなし、内表面に背向した外表面がなめらかにくぼんだ形状に形成されている。つまり、本体部50は、断面において外表面と内表面とが非対称をなすように形成されている。本実施例の本体部50は、実施例1の起歪体5の本体部50の内表面が本実施例の本体部50の外表面をなし、実施例1の起歪体5の本体部50の外表面が本実施例の本体部50の内表面をなすような形状に形成されている。
【0072】
そして、本実施例においては、平面状に形成された本体部50の内表面に歪みゲージ4が固定されている。
【0073】
本実施例においては、本体部50は、クラッシュボックス3から離反する方向に変形を生じる。本実施例においても、実施例1の湾曲形状と同様に、歪みゲージ4が固定された起歪体5の本体部50の変形方向が一定となっている。そして、本実施例においても、歪みゲージ4が測定する本体部50の歪みの方向が一定に規制されている。つまり、本実施例の衝突検知手段は、歪みゲージ4の出力信号の正負の方向が一定となり、検出誤差が生じにくくなっている。つまり、本実施例の衝突検知手段は、検出精度にすぐれた衝突検知手段となっている。
【0074】
(実施例5)
本実施例は、起歪体5の本体部50の断面形状が異なる以外は、実施例4と同様な構成の衝突検知手段である。
【0075】
本実施例の起歪体5の本体部50は、帯状の幅方向での断面(車両の上下方向での断面)が図10に示したように、クラッシュボックス3に対向した内表面がなめらかな凸状をなすように形成されている。そして、外表面も内表面の湾曲形状にそった湾曲形状に形成されている。つまり、起歪体5の本体部50は、帯状の幅方向での断面が内表面方向に突出した弧状をなすように形成されている。本体部50は、車両の上下方向での断面が非対称な形状に形成されている。本実施例の本体部50は、実施例1の起歪体5の本体部50の内表面が本実施例の本体部50の外表面をなし、実施例2の起歪体5の本体部50の外表面が本実施例の本体部50の内表面をなすような形状に形成されている。本実施例の起歪体5の構成を示した図10は、実施例4の起歪体5の本体部50の断面を示した図9に対応した断面図である。
【0076】
本実施例においても、実施例4の時と同様に、歪みゲージ4が固定された起歪体5の本体部50の変形方向がクラッシュボックス3から離反する方向に一定となっており、歪みゲージ4が測定する本体部50の歪みの方向が圧縮する方向に規制されている。つまり、本実施例の衝突検知手段は、歪みゲージ4の出力信号の正負の方向が一定となり、検出誤差が生じにくくなっている。つまり、本実施例の衝突検知手段は、検出精度にすぐれた衝突検知手段となっている。
【0077】
(実施例6)
本実施例は、起歪体5の本体部50の断面形状が異なる以外は、実施例4と同様な構成の衝突検知手段である。
【0078】
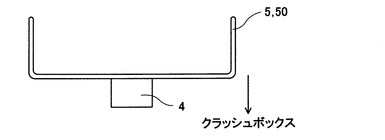
本実施例の起歪体5の本体部50は、帯状の幅方向での断面(車両の上下方向での断面)が図11に示したように、帯状の幅方向で金属板を略コ字状に曲成してなる構成を有している。そして、本体部50は、略コ字状の開口端部がクラッシュボックス3から離反する方向に突出している。本体部50は、車両の上下方向での断面が非対称な形状に形成されている。
【0079】
本実施例においても、実施例4の時と同様に、歪みゲージ4が固定された起歪体5の本体部50の変形方向が一定となっており、歪みゲージ4が測定する本体部50の歪みの方向が一定に規制されている。つまり、本実施例の衝突検知手段は、歪みゲージ4の出力信号の正負の方向が一定となり、検出誤差が生じにくくなっている。つまり、本実施例の衝突検知手段は、検出精度にすぐれた衝突検知手段となっている。
【0080】
(実施例7)
本実施例は、起歪体5の本体部50の形状が異なる以外は、実施例1と同様な構成の衝突検知手段である。本実施例の起歪体5の構成を図11に示した。
【0081】
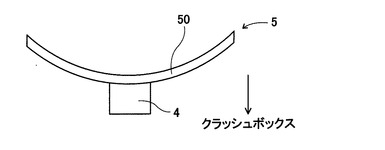
本実施例の起歪体5の本体部50は、帯状の長手方向での断面(車両の前後方向での断面)が図12に示したように、中央部がクラッシュボックス3から離反する方向に突出した弧状をなすように形成されている。また、本体部50は、略帯状の部材を湾曲させて形成されており、幅方向での厚さは一定である。つまり、上記の各実施例においては、帯状の幅方向(車両の上下方向)での断面が湾曲した形状に形成されているが、本実施例は帯状の長手方向での断面が湾曲した形状に形成されている。
【0082】
そして、本実施例においては、本体部50の外表面に歪みゲージ4が固定されている。
【0083】
本実施例においては、起歪体5は、本体部50がクラッシュボックス3から離反する方向に変形を生じる。本実施例においても、歪みゲージ4が固定された起歪体5の本体部50の変形方向が一定となっている。そして、本実施例においても、歪みゲージ4が測定する本体部50の歪みの方向が一定に規制されている。つまり、本実施例の衝突検知手段は、歪みゲージ4の出力信号の正負の方向が一定となり、検出誤差が生じにくくなっている。つまり、本実施例の衝突検知手段は、検出精度にすぐれた衝突検知手段となっている。
【0084】
(実施例8)
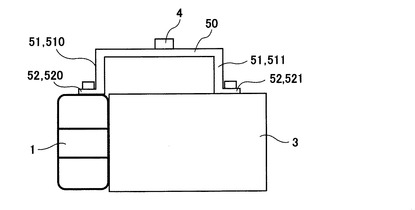
本実施例は、起歪体5の固定される位置が異なる以外は、実施例1と同様な構成の衝突検知手段である。本実施例の衝突検知手段の構成を図13に示した。本実施例の構成を示す図13は、クラッシュボックス3およびバンパリンフォースメント1近傍の構成を示した。
【0085】
本実施例の起歪体5は、図13に示したように、車両前方側に位置する一方の端部510がバンパリンフォースメント1に、車両後方側に位置する他方の端部511がクラッシュボックス3に固定されている。起歪体5は、本体部50の長手方向の両端に脚部510,511が垂直にもうけられ、脚部510,511からそれぞれ略コ字状の開口から外側に広がるようにフランジ52,52を有しており、このフランジ部520,521を貫通したねじで固定された。
【0086】
そして、起歪体5の本体部50は、車両前後方向に直交する断面が実施例1の時と同様に凹レンズ状をなすように形成されている。
【0087】
本実施例は、起歪体5の一方の脚部510の固定される相手部材が異なる以外は実施例1と同様な構成である。本実施例においても、衝突によりクラッシュボックス3に歪みが生じることで、起歪体5の両端部510,511間の距離が変化して起歪体5の本体部50に歪みが発生する。本体部50の断面形状が上記の実施例1のときと同様であり、実施例1の時と同様に本体部50がクラッシュボックス3に接近する方向に歪みが生じる。つまり、本実施例の衝突検知手段は、実施例1の時と同様な効果を発揮できる。
【0088】
(実施例8の変形形態)
実施例8は、起歪体5の形態が異なる以外は実施例1と同様な構成の衝突検知手段であり、起歪体5の本体部50を、実施例2〜7の本体部50と同様な形態としてもよい。
【0089】
(実施例9)
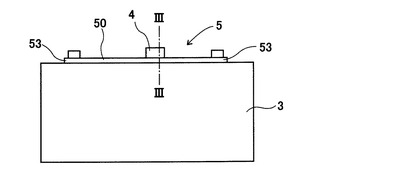
本実施例は、起歪体5の形態が異なる以外は、実施例1と同様な構成の衝突検知手段である。本実施例の衝突検知手段の構成を図14に示した。
【0090】
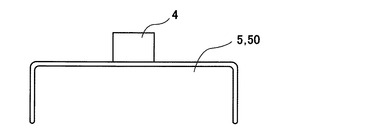
本実施例の起歪体5は、図14に示したように、長手方向が車両前後方向に伸びた略帯状を有している。そして、両端部53,53がクラッシュボックス3に固定されている。起歪体5は、両端部53,53を貫通したねじで固定された。起歪体5は、内表面がクラッシュボックス3に密着した状態で固定された。本実施例は、上記の各実施例のフランジ部52と脚部51とが一体になった構成を有している。
【0091】
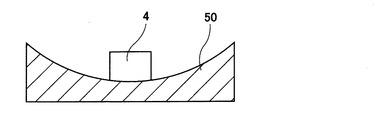
そして、起歪体5の本体部50は、帯状の幅方向での断面(車両の上下方向での断面)が図15に示したように、クラッシュボックス3に対向した内表面が平面をなし、内表面に背向した外表面がなめらかにくぼんだ形状に形成されている。つまり、本体部50は、車両の上下方向での断面が非対称な形状に形成されている。ここで、起歪体5の本体部50の断面を示した図15は、図14中のIII−III面での断面図である。
【0092】
そして、歪みゲージ4は、起歪体5の本体部50の外表面に固定されている。
【0093】
本実施例は、起歪体5の形態が異なる以外は実施例1と同様な構成である。本実施例においても、衝突によりクラッシュボックス3に歪みが生じることで、起歪体5の両端部51,51間の距離が変化して起歪体5の本体部50に歪みが発生する。本実施例は本体部50の断面形状が実施例1の時と逆に形成されており、本体部50がクラッシュボックス3から離反する方向に歪みが生じる。つまり、本実施例の衝突検知手段は、歪みゲージ4の出力信号の正負の方向が一定となり、検出誤差が生じにくくなっている。つまり、本実施例の衝突検知手段は、検出精度にすぐれた衝突検知手段となっている。
【0094】
(その他の変形形態)
上記の各実施例においては、起歪体5がクラッシュボックス3の側面に固定されているが、側面だけでなく、上面や下面に固定する形態としてもよい。
【0095】
また、クラッシュボックス3の起歪体5の両端部51,51にはさまれた部分を歪みの生じやすい構成としてもよい。このような構成としては、たとえば、部分的に薄肉化するなどの方法をあげることができる。このような構成とすることで、衝突時にこの部分の歪みが大きくなり、衝突の衝撃が小さくても衝突の検知を行うことができる。
【図面の簡単な説明】
【0096】
【図1】実施例1の衝突検知システムの構成を示した図である。
【図2】実施例1の衝突検知システムのクラッシュボックス近傍の構成を示した断面図である。
【図3】実施例1の衝突検知システムの起歪体の断面図である。
【図4】実施例1の衝突検知システムの起歪体の断面図である。
【図5】実施例1の衝突検知システムをもつ歩行者保護手段の構成を示した図である。
【図6】実施例2の衝突検知システムの起歪体の断面図である。
【図7】実施例3の衝突検知システムの起歪体の断面図である。
【図8】実施例4の衝突検知システムのクラッシュボックス近傍の構成を示した断面図である。
【図9】実施例4の衝突検知システムの起歪体の断面図である。
【図10】実施例5の衝突検知システムの起歪体の断面図である。
【図11】実施例6の衝突検知システムの起歪体の断面図である。
【図12】実施例7の衝突検知システムのクラッシュボックス近傍の構成を示した断面図である。
【図13】実施例8の衝突検知システムのクラッシュボックス近傍の構成を示した断面図である。
【図14】実施例9の衝突検知システムのクラッシュボックス近傍の構成を示した断面図である。
【図15】実施例9の衝突検知システムの起歪体の断面図である。
【図16】従来の衝突検知手段の起歪体の変形を示した図である。
【図17】従来の衝突検知手段の起歪体の変形を示した図である。
【符号の説明】
【0097】
1:バンパリンフォースメント
2:サイドメンバ
3:クラッシュボックス
4:歪みゲージ
5:起歪体
6:アブソーバ
【技術分野】
【0001】
本発明は、車両が物体に衝突したことを検知する衝突検知手段に関し、詳しくは、車両と歩行者の衝突を検知する衝突検知手段に関する。
【背景技術】
【0002】
近年、車両において事故時の安全性の向上が図られている。車両の安全性に関して、事故時に車両の搭乗者の安全性を確保するだけでなく、車両に歩行者が衝突したときに歩行者が致命的なダメージを受けないことも求められてきている。
【0003】
車両に衝突した歩行者の保護装置としては、車両に衝突してボンネットに倒れ込んできた歩行者が受ける傷害値(歩行者が受ける衝撃)を下げる種々の装置が考えられている。歩行者が受ける衝撃を下げることで、歩行者が致命的なダメージを受けることを抑える。このような保護装置において歩行者などの車両への衝突を検知することが重要となっている。
【0004】
車両への衝突を検知する装置としては、たとえば、ワイヤー、応力センサ、光ファイバをフロントバンパに組み付け、ワイヤーの張力変化、応力センサの出力信号、光ファイバを流れる光の減衰などから、衝突を検知する装置がある。
【0005】
しかしながら、これらの装置は、フロントバンパに沿ってワイヤー、応力センサ、光ファイバを設置する必要があり、配置スペースの拡大化や配置構造の複雑化を招いていた。つまり、組み付け性の低下や組み付けコストの上昇があった。
【0006】
このような問題に対して、車両が元々備えているサイドメンバまたはクラッシュボックスが衝突時に変形を生じることに着目した衝突検知手段が開発されている。この衝突検知手段は、図2に示したように、車両左右方向に延在するように配置されたバンパリンフォースメント1と、バンパリンフォースメント1に結合して車両前後方向に延在するように配置されるサイドメンバ2またはクラッシュボックス3である側方支持部材と、側方支持部材に生じる歪みを検出する歪み検出手段4と、を備えた構成を有している。
【0007】
この衝突検知手段は、衝突により側方支持部材が歪みを生じたときに、この歪みを歪み検出手段が検出して衝突を検知する。
【0008】
しかしながら、このような構成の衝突検知手段は、歪み検出手段の出力信号の極性が一定ではないという問題があった。具体的には、この衝突検知手段は、両端が側方支持部材に固定された起歪体5上に歪み検出手段4が固定されている。そして、側方支持部材に歪みが生じると、起歪体5にも歪みが生じ、起歪体5上に固定された歪み検知手段4が歪みを検知する。起歪体5の歪み検出手段4が固定された部分50は板状であり、起歪体5の両端の固定部52,52の距離が短くなる方向の応力が加わったときには、歪み検出手段4が固定された表面が凸(図16)あるいは凹(図17)となる方向に変形(湾曲)を生じる。つまり、歪み検知手段4が固定された部分の表面が図16に示したように凸となるように変形を生じたとき(引っ張り応力が発生するとき)に歪み検出手段が正の出力信号を発するように設定すると、図17に示したように凹となるように変形を生じたとき(圧縮応力が発生するとき)には負の出力信号を発することとなる。
【発明の開示】
【発明が解決しようとする課題】
【0009】
本発明は上記実情に鑑みてなされたものであり、歪み検出手段の出力信号の極性が安定した衝突検知手段を提供することを課題とする。
【課題を解決するための手段】
【0010】
上記課題を解決するために本発明者は車両へ組み付けることができる衝突検知手段について検討を重ねた結果本発明をなすに至った。
【0011】
すなわち、本発明の衝突検知手段は、車両左右方向に延在するように配置されたバンパリンフォースメントと、バンパリンフォースメントに結合して車両前後方向に延在するように配置されるサイドメンバまたはクラッシュボックスである側方支持部材と、側方支持部材に生じる歪みを検出する歪み検出手段と、車両前後方向に延在する略板形状を有し歪み検出手段が固定される本体部と、本体部にもうけられバンパリンフォースメントまたは側方支持部材に固定される一の固定部と、本体部にもうけられ側方支持部材に固定される他の固定部と、を有する起歪体と、を有する衝突検知手段において、本体部は、車両前後方向または車両前後方向に垂直な面で切った断面が車両の上下方向に非対称な形状となるように形成されていることを特徴とする。
【0012】
また、本発明の保護システムは、請求項1〜4のいずれかに記載の衝突検知手段と、衝突検知手段が組み付けられた車両と歩行者の衝突時に、歩行者を保護する保護手段と、衝突検知手段の出力信号が入力され、出力信号に基づいて衝突物の判定を行う衝突判定手段と、衝突判定手段が衝突物が歩行者であると判定したときに保護手段を作動させる起動手段と、を有することを特徴とする。
【発明の効果】
【0013】
本発明の衝突検知手段は、衝突時に側方支持部材に生じた歪みを検出することで衝突を検出する。そして、本発明の衝突検知手段は、歪みを検出する歪み検出手段が、固定された起歪体の本体部の断面形状を調節することで、本体部の変形方向が一定となっている。これにより、本体部の変形方向が一定となり、歪み検出手段には一定の方向の応力が加わることとなり、出力信号の極性が安定する。この結果、衝突の検知精度が向上する。
【0014】
本発明の保護システムは、上記の衝突検知手段を用いた保護システムである。つまり、衝突の検知精度に優れた衝突検知手段を用いており、誤検知による誤作動が抑えられた保護システムとなっている。
【発明を実施するための最良の形態】
【0015】
(衝突検知手段)
本発明の衝突検知手段は、車両左右方向に延在するように配置されたバンパリンフォースメントと、バンパリンフォースメントに結合して車両前後方向に延在するように配置されるサイドメンバまたはクラッシュボックスである側方支持部材と、側方支持部材に生じる歪みを検出する歪み検出手段と、車両前後方向に延在する略板形状を有し歪み検出手段が固定される本体部と、本体部にもうけられバンパリンフォースメントまたは側方支持部材に固定される一の固定部と、本体部にもうけられ側方支持部材に固定される他の固定部と、を有する起歪体と、を有する衝突検知手段である。本発明の衝突検知手段は、衝突時に側方支持部材に生じた歪みを歪み検出手段で検出することで衝突を検出する。
【0016】
本発明の衝突検知手段は、このような構成となることで、フロントバンパに沿って衝突検知用の部材を新たに配置する必要がないので、配置スペースの拡大化および配置構造の複雑化を抑制することができる。
【0017】
そして、本発明の衝突検知手段においては、歪み検出手段は、バンパリンフォースメントまたは側方支持部材に直接固定されるのではなく、バンパリンフォースメントまたは側方支持部材に固定された起歪体に固定されている。このような構成となることで、側方支持部材やバンパリンフォースメントを組み付けた後に歪み検知手段を組み付けることができ、組み付け性が向上する。また、起歪体を介して歪み検出手段を固定することで、歪み検出手段を正確な位置に固定することができる。
【0018】
そして、起歪体の本体部は、車両前後方向または車両前後方向に垂直な面で切った断面が車両の上下方向に非対称な形状となるように形成されている。本体部が車両の上下方向に非対称な形状となる断面形状をなすように形成されたことで、帯状の長手方向(車両の前後方向)に圧縮する応力が働いたときに、本体部の変形する方向(湾曲方向)が一定となる。具体的には、本体部の断面形状において、互いに背向する一方の表面と他方の表面がその重心に対して非対称をなす形状となると、本体部の断面の重心と歪みによる荷重重心とにズレが生じる。そして、本体部に荷重が加わったときに、荷重重心が重心(断面の重心)に一致するように本体部が変形を生じる。つまり、本体部は、一定の方向のみに変形を生じる。本発明の衝突検知手段は、本体部の表面を非対称に形成することで重心と荷重重心のズレを形成しており、本体部の変形方向が一定方向に規制されている。この結果、本発明の衝突検知手段は、本体部の歪みの生じる方向が一定となり、本体部に固定された歪み検出手段には一方向の歪みが検出される。すなわち、本発明の衝突検知手段は、本体部に固定された歪み検出手段の出力信号の極性が一定となり、衝突の検知精度が向上した。
【0019】
本発明の衝突検知手段においては、車両前後方向に垂直な面で切った断面が車両の上下方向に非対称な形状となることで本体部が変形する方向を規制しているが、非対称な形状を区画する表面の形状により変形する方向が決定する。ここで、本発明において、衝突時に本体部の変形する方向は特に限定されるものではない。たとえば、本体部の断面形状において一方の表面または他方の表面が凹状にくぼんだ形状をなしているときには、重心位置が、くぼんでいない表面からくぼんだ表面方向に移動する。具体的には、断面が方形の平板状の部材においては、この部材の重心は対角線の交差する位置にある。これに対し、一方の表面がくぼんだ略凹レンズ状をなす場合には、略凹レンズの形状は、平板状の部材の一方の表面の両端部が突出した形状と考えられる。この場合、突出した部分に対応して重心位置が移動する。
【0020】
起歪体の本体部は、車両前後方向に沿った面で切った断面が、バンパリンフォースメントまたは側方支持部材に対向する一方の表面、または一方の表面に背向する他方の表面が、背向する表面方向にくぼんだ凹をなす断面形状を有することが好ましい。ここで、表面が凹をなすとは、本体部の断面形状が、略凹レンズ状の湾曲面がなす形状を示す。このような形状になることで、本体部の重心位置が凹をなした表面に背向する表面から移動する。これにより、変形方向が規制される。このとき、凹状をなした表面に背向する表面(一方の表面に凹状が形成されたときの他方の表面,他方の表面に凹状が形成されたときの一方の表面)は、凹状をなした表面にそった湾曲形状をなしても、平面を形成してもいずれでもよい。
【0021】
互いに背向する表面の一方の表面または他方の表面が背向する表面方向にくぼんだ凹をなすときの、凹状のくぼみの具体的な形状は、その表面において幅方向の両端部が最も突出している形状であればよく、その断面が滑らかに変化する略U字状であっても、角部をもつ略コ字状であっても、いずれでもよい。起歪体の本体部は、車両前後方向に垂直な面で切った断面形状が略コ字状をなすように形成されたことが好ましい。
【0022】
起歪体の本体部は、車両前後方向に沿った面で切った断面が、前記バンパリンフォースメントまたは前記側方支持部材に対向する一方の表面、または該一方の表面に背向する他方の表面が、背向する表面方向にくぼんだ凹をなす断面形状を有することが好ましい。車両の前後方向の断面(帯状の本体部の長手方向での断面)においても同様に、一方または他方の表面が凹をなす形状に形成しても、上記の車両の前後方向に垂直な断面のときと同様に歪みの変形方向を規制することができる。
【0023】
本発明の衝突検知手段において、起歪体は、車両前後方向に延在する略板形状を有し歪み検出手段が固定される本体部と、本体部にもうけられバンパリンフォースメントまたは側方支持部材に固定される一の固定部と、本体部にもうけられ側方支持部材に固定される他の固定部と、を有する構成であれば、その具体的な形状は限定されるものではない。たとえば、本体部が側方支持部材に密着した状態(一対の固定部と本体部とが平板状をなす形態)であっても、本体部が側方支持部材から間隔を隔てて保持された状態(一対の固定部と本体部とが略コ字状をなす形態)であっても、いずれでもよい。ここで、本体部が側方支持部材に密着した状態であるときには、本体部は、側方支持部材から離反する方向に変形するように設計される。
【0024】
本発明の衝突検知手段において、バンパリンフォースメント、側方支持部材及び歪み検出手段は、従来の衝突検知手段に用いられた部材を使用することができる。
【0025】
歪み検出手段は、起歪体の本体部に固定され、本体部の歪みを検出することができる手段であればよく、従来公知の歪みゲージなどを用いることができる。
【0026】
側方支持部材は、サイドメンバまたはクラッシュボックスであり、車両がサイドメンバまたはクラッシュボックスをもつ場合には、いずれか一方であればよい。ここで、クラッシュボックスは、車両と物体が衝突を生じた時のエネルギーを吸収する部材である。
【0027】
本発明の衝突検知手段においては、側方支持部材は、車両前後方向の強度が相対的に高い部位と低い部位とを備え、歪み検出手段は側方支持部材のうち車両前後方向の強度が低い部位の歪みを検出することが好ましい。この車両前後方向の強度が低い部位が上記の衝突時に変形を生じる部分に対応する。
【0028】
サイドメンバまたはクラッシュボックスは、一般的に剛性が高く、歩行者などの衝突においてはその歪み量が小さく、歪みの検出が容易ではない。そこで、側方支持部材が、車両の前後方向の強度が相対的に高い部位と低い部位とを備えるようにすることで、車両が物体に衝突した場合に、側方支持部材のうち車両前後方向の強度が相対的に低い部位には、応力が集中する。その結果、側方支持部材のうち車両前後方向の強度が相対的に低い部位に生じる応力は、側方支持部材のうち車両前後方向の強度が相対的に高い部位に生じる応力に比べて、大きくなる。そして、圧縮応力が大きいほど、歪み量が大きくなる。
【0029】
つまり、車両が物体に衝突したときに受ける衝撃荷重が小さい場合であっても、側方支持部材のうち車両前後方向の強度が相対的に低い部位に生じる歪みは、歪み検出手段により十分に検出できる程度に大きくすることができる。従って、このように側方支持部材のうち車両前後方向の強度が相対的に低い部位に生じる歪みを用いることで、車両が物体に衝突したときに車両が受ける衝突荷重が小さい場合であっても、車両が物体に衝突したことを確実に検知することができる。
【0030】
本発明の衝突検知手段は、歪み検出手段の出力信号が入力され、入力された出力信号から衝突の判定を行う演算手段を有することが好ましい。演算手段による判定は、従来公知の判定方法を用いて行うことができる。演算手段には、車速センサ等の出力信号が入力され、これらの出力信号も参照して判定を行うことができる。なお、演算手段は、ひとつの演算手段で衝突の判定を行っても、複数の演算手段を組み合わせて衝突の判定を行っても、いずれでもよい。
【0031】
本発明の衝突検知手段において演算手段は、歪み検出手段の出力信号から衝突物の衝突位置や衝突物の種類を判定することが好ましい。衝突物の衝突位置や衝突物の種類を判定することで、衝突物や乗員に有効な保護システムを動作させることができる。
【0032】
本発明の衝突検知手段は、エアバッグなどの乗員保護システムや歩行者を保護する歩行者保護システムに利用することができる。本発明の衝突検知手段が保護システムの一部をなすときには、演算手段の判定結果から、エアバッグ等の保護手段を作動させることで、乗員や歩行者を保護することができる。また、演算手段がエアバッグ等の保護手段を作動させる作動信号を発することが好ましい。
【0033】
(保護システム)
本発明の保護システムは、請求項1〜4のいずれかに記載の衝突検知手段と、衝突検知手段が組み付けられた車両と歩行者の衝突時に、歩行者を保護する保護手段と、衝突検知手段の出力信号が入力され、出力信号に基づいて衝突物の判定を行う衝突判定手段と、衝突判定手段が衝突物が歩行者であると判定したときに保護手段を作動させる起動手段と、を有することを特徴とする。
【0034】
本発明の保護システムは、請求項1〜4に記載の衝突検知手段を用いた保護システムである。本発明の保護システムは、衝突検知手段(の歪み検出手段)が歩行者の衝突時の側方支持部材の歪みを検出し、出力信号を発する。上記したように、この出力信号の極性は一定であり、極性の反転による誤検知が発生しなくなっている。
【0035】
歪み検出手段の出力信号は衝突判定手段に入力され、衝突物が歩行者であるか否かの判定を行う。衝突判定手段における衝突物の判定は、従来公知の判定方法を用いることができる。
【0036】
衝突判定手段において衝突物が歩行者であると判定したときには、判定結果から起動手段が保護手段を起動するための起動信号を保護手段に送信する。本発明において、衝突判定手段と起動手段とはひとつの演算装置(ECUなど)であってもよい。
【0037】
起動信号を受信した保護手段は、稼働し、歩行者を保護する。保護手段は、エアバック等の従来公知の保護手段である。
【実施例】
【0038】
以下、実施例を用いて本発明を説明する。
【0039】
本発明の実施例として、車両のバンパに設置された衝突検知手段を製造した。
【0040】
(実施例1)
本実施例の衝突検知手段は、バンパリンフォースメント1、サイドメンバ2、クラッシュボックス3、歪みゲージ4、起歪体5、バンパアブソーバ6、バンパカバー7および演算手段(図示せず)を有する。本実施例の衝突検知手段の構成を図1〜2に示した。なお、図1は衝突検知手段全体の構成を、図2はクラッシュボックス3の近傍の構成を示した図である。
【0041】
バンパリンフォースメント1は、車両の幅方向にそって延在する金属製の部材である。バンパリンフォースメント1は、車両のフレームの一部を構成する構造部材である。本実施例においては、バンパリンフォースメント1は、内部中央に二段の梁が設けられた断面が略目字状を有する中空部材からなる。バンパリンフォースメント1は、一対のサイドメンバ2にクラッシュボックス3を介して固定される。バンパリンフォースメント1が固定される車両のサイドメンバ2は、車両のエンジンルームの前方に突出した一対の部材である。
【0042】
サイドメンバ2は、バンパリンフォースメント1の車両左右方向の両端部から車両後方に延在するように、それぞれ配置されている。このサイドメンバ2は、バンパリンフォースメント1と同様に車両フレームの一部を構成する構造部材である。サイドメンバ2は、たとえば、車両前後方向に垂直な断面が矩形状からなる中空部材からなる。
【0043】
クラッシュボックス3は、車両前方が衝突物に衝突したときのエネルギーを吸収する部材である。クラッシュボックス3は、バンパリンフォースメント1とサイドメンバ2との間に介在するように配置されている。クラッシュボックス3は、サイドメンバ2と同様に、車両前後方向に垂直な断面が矩形状からなる中空部材である。
【0044】
歪みゲージ4は、起歪体5上に固定された状態でクラッシュボックス3に固定されている。歪みゲージ4は、クラッシュボックス3の歪みを起歪体5の歪みとして検出する。
【0045】
起歪体5は、車両前後方向での断面が略コ字状を有するように帯状の金属板を曲成してなる部材である。起歪体5は、車両前後方向に伸びた状態で固定されている。起歪体5は、略コ字状の長手方向の中央部が本体部50をなし、本体部50の長手方向の両端に本体部50から垂直にのびる脚部51,51が形成されている。そして、起歪体5の略コ字状の底部よりなる本体50の外表面(クラッシュボックス3に対向する内表面に背向した表面)に歪みゲージ4が固定されている。この本体部50は、車両の前後方向での中央部の近傍の帯状の幅が他の部分(脚部51、フランジ52など)よりも短くなるように形成されている。そして、起歪体5は、略コ字状の開口端(脚部51,51の本体部50と反対の端部)からそれぞれ外側に広がるようにフランジ52,52を有している。起歪体5は、フランジ52,52およびクラッシュボックス3を貫通したねじ59でねじ止めして固定される。
【0046】
起歪体5の本体部50は、帯状の幅方向での断面(車両の上下方向での断面)が図3に示したように、外表面が直線を、クラッシュボックス3に対向した内表面がなめらかにくぼんだ形状(略凹レンズ状)に形成されている。つまり、本体部50は、車両の上下方向での断面が非対称な形状に形成されている。外表面と内表面とが非対称をなすように形成されたことで、クラッシュボックス3に歪み(車両前後方向に圧縮する歪み)が生じたときに、本体部50は内表面方向(クラッシュボックス3)方向に湾曲して変形するようになる。なお、図3は、図2中のI−I断面における断面図である。
【0047】
バンパアブソーバ6は、バンパリンフォースメント1の車両前面に配置された部材である。バンパアブソーバ6は、車両の左右方向に延在する部材であり、車両前方からの衝撃を吸収する部材である。本実施例においては、バンパアブソーバ6は、車両の上下方向の上方に位置するアッパーアブソーバ60と、アッパーアブソーバ60の下方に位置するロアーアブソーバ61と、からなる。
【0048】
バンパカバー7は、車両の最前面に配され、バンパアブソーバ6の車両前面を被覆する部材である。通常、車両に衝突物が衝突したときには、このバンパカバー7が衝突する。
【0049】
演算手段は、歪みゲージ4に接続され、歪みゲージ4により検出された歪みに基づいて、衝突の検知(判定)を行う。演算手段においての衝突の検知は従来公知の判定方法で判定することができ、たとえば、検出された歪み量があらかじめ設定されたしきい値よりも大きくなった場合に衝突と判定することができる。ここで、演算手段は、あらかじめ車両に搭載された演算手段としてもよい。好ましくは、乗員保護装置や歩行者保護装置の演算手段である。
【0050】
本実施例の衝突検知手段による衝突の検知について以下に説明する。
【0051】
この車両のバンパに衝突物が衝突すると、衝突物が車両のバンパを押圧することとなる。衝突物は、車両のバンパのバンパーカバー7を介してバンパアブソーバ6を押圧する。バンパアブソーバ6は、衝突物が衝突した衝撃の一部を吸収するとともにバンパリンフォースメント1を押圧する。
【0052】
押圧されたバンパリンフォースメント1は、その衝撃の一部を吸収するとともにクラッシュボックス3を押圧する。押圧されたクラッシュボックス3は、車両前後方向に圧縮される変形を生じる。つまり、クラッシュボックス3に車両前後方向の歪みが生じる。
【0053】
クラッシュボックス3に歪みが生じると、クラッシュボックス3に固定された起歪体5のフランジ52,52間の距離も短くなる。つまり、起歪体5が車両前後方向に圧縮される。起歪体5に車両前後方向(帯の長手方向)で圧縮する応力が加わると、本体部50近傍に歪みが生じる。これは、本体部50近傍は端部51近傍よりも帯の幅が短く形成されていることから、応力が集中することによる。
【0054】
本体部50は、外表面と内表面とが非対称をなすように形成されており、本体部50の重心が図4に示したように内表面の表面から外側に位置している。そして、本体部50に集中した応力は、図4に示した荷重重心に集中する。図4に示したように、本体部50の重心と荷重重心とは一致しておらず、本体部50に集中した荷重重心が本体部50の重心と一致する方向(クラッシュボックス3方向)に本体部50が変形(湾曲)する。このことから、本体部50がクラッシュボックス3に近接する方向に湾曲し、クラッシュボックス3から離反する方向に変形しなくなっている。すなわち、本体部50の変形方向がひとつの方向に規制されている。
【0055】
この本体部50の変形を、歪みゲージ4で検出する。上記したように、本体部50の変形方向が規制されたことで、歪みゲージ4には、常に、圧縮する方向の応力が働く。つまり、歪みゲージ4は、圧縮する方向の歪みのみを検知する。この結果、歪みゲージ4は、圧縮方向のみの出力信号を出力する。圧縮信号のみの出力信号は、その極性が一定である。
【0056】
上記したように、本実施例の衝突検知手段は、歪みゲージ4が固定された起歪体5の本体部50の変形方向が一定となっており、歪みゲージ4が測定する本体部50の歪みの方向が一定に規制されている。つまり、本実施例の衝突検知手段は、歪みゲージ4の出力信号の正負の方向が一定となり、検出誤差が生じにくくなっている。つまり、本実施例の衝突検知手段は、検出精度にすぐれた衝突検知手段となっている。
【0057】
本実施例および以下の実施例2〜9の衝突検知手段は、衝突時に歩行者を保護する歩行者保護システムに用いることができる。
【0058】
歩行者保護システムは、衝突検知手段と、衝突検知手段の歪みゲージ4の出力信号が入力され出力信号に基づいて衝突物の判定を行う衝突判定手段と、衝突判定手段が衝突物が歩行者であると判定したときに保護手段を作動させる起動手段と、衝突検知手段が組み付けられた車両と歩行者の衝突時に、歩行者を保護する歩行者保護手段と、を備えている。この保護システムの構成を図5に示した。
【0059】
まず、歪みゲージ4で検知された歪みは衝突判定手段に送信される。衝突判定手段は、歪みゲージ4の検出結果から衝突物が衝突したと検知したときには、衝突物が歩行者か否かの判定を行う。衝突判定手段における判定は、たとえば、以下のようにして行うことができる。まず、衝突物が衝突したか否かの判定を行い、衝突物が衝突したと検知したときには、歪みゲージ4の出力信号から衝突荷重を算出する。ここで、衝突荷重は、歪みゲージ4において検出される歪みに対して線形性を有する。
【0060】
そして、算出された衝突荷重と、車速センサ(図示せず)により検出される車速と、に基づいて、衝突物の質量を算出する。衝突荷重と車速とから衝突物の質量を算出する方法は、従来公知の方法を用いることができ、衝突荷重の一回積分値と車速を用いて質量を算出する方法を用いることができる。
【0061】
そして、衝突判定手段は、衝突物の質量から衝突物の種類の判定を行う。たとえば、衝突物の質量が所定の範囲内であるときには歩行者と判定し、所定範囲よりも大きい場合には建築物や別の車両などと判定する。
【0062】
そして、衝突物が歩行者と判定したときには、起動手段が歩行者保護手段を起動させる起動信号を発する。起動信号を受信した歩行者保護手段が作動し、歩行者を保護する。
【0063】
歩行者保護手段は、車両のフードに搭載され歩行者が衝突したときに歩行者を保護する装置であり、たとえば、フードの跳ね上げを行う装置や、フード状に展開するエアバッグ装置などである。歩行者保護手段が作動することで、車両とに衝突した歩行者がうける傷害値を低減する。
【0064】
(実施例2)
本実施例は、起歪体5の本体部50の断面形状が異なる以外は、実施例1と同様な構成の衝突検知手段である。
【0065】
本実施例の起歪体5の本体部50は、帯状の幅方向での断面(車両の上下方向での断面)が図6に示したように、クラッシュボックス3に対向した内表面がなめらかにくぼんだ形状に形成されている。この内表面の形状は、実施例1の本体部50の内表面の形状と一致する形状である。そして、外表面も内表面の湾曲形状にそった湾曲形状に形成されている。つまり、起歪体5の本体部50は、帯状の幅方向での断面が弧状をなすように形成されている。本体部50は、車両の上下方向での断面が非対称な形状に形成されている。本実施例の起歪体5の断面を示した図6は、実施例1の起歪体5の本体部50の断面を示した図3に対応した断面図である。
【0066】
本実施例においても、実施例1の時と同様に、歪みゲージ4が固定された起歪体5の本体部50の変形方向が一定となっており、歪みゲージ4が測定する本体部50の歪みの方向が一定に規制されている。つまり、本実施例の衝突検知手段は、歪みゲージ4の出力信号の正負の方向が一定となり、検出誤差が生じにくくなっている。つまり、本実施例の衝突検知手段は、検出精度にすぐれた衝突検知手段となっている。
【0067】
(実施例3)
本実施例は、起歪体5の本体部50の断面形状が異なる以外は、実施例1と同様な構成の衝突検知手段である。
【0068】
本実施例の起歪体5の本体部50は、帯状の幅方向での断面(車両の上下方向での断面)が図7に示したように、帯状の幅方向で金属板を略コ字状に曲成してなる構成を有している。そして、本体部50は、略コ字状の開口端部がクラッシュボックス3側に位置している。本体部50は、車両の上下方向での断面が非対称な形状に形成されている。本実施例の起歪体5の断面を示した図7は、実施例1の起歪体5の本体部50の断面を示した図3に対応した断面図である。
【0069】
本実施例においても、実施例1の時と同様に、歪みゲージ4が固定された起歪体5の本体部50の変形方向が一定となっており、歪みゲージ4が測定する本体部50の歪みの方向が一定に規制されている。つまり、本実施例の衝突検知手段は、歪みゲージ4の出力信号の正負の方向が一定となり、検出誤差が生じにくくなっている。つまり、本実施例の衝突検知手段は、検出精度にすぐれた衝突検知手段となっている。
【0070】
(実施例4)
本実施例は、起歪体5の本体部50の断面形状が異なるとともに歪みゲージ4が内表面に固定した以外は、実施例1と同様な構成の衝突検知手段である。本実施例の起歪体5の構成を図8〜9に示した。本実施例の起歪体5の構成を示した図8は、実施例1の図2に対応した図であり、図9は図8中のII−II断面における断面図である。
【0071】
本実施例の起歪体5の本体部50は、帯状の幅方向での断面(車両の上下方向での断面)が図9に断面を示したように、クラッシュボックス3に対向した内表面が平面をなし、内表面に背向した外表面がなめらかにくぼんだ形状に形成されている。つまり、本体部50は、断面において外表面と内表面とが非対称をなすように形成されている。本実施例の本体部50は、実施例1の起歪体5の本体部50の内表面が本実施例の本体部50の外表面をなし、実施例1の起歪体5の本体部50の外表面が本実施例の本体部50の内表面をなすような形状に形成されている。
【0072】
そして、本実施例においては、平面状に形成された本体部50の内表面に歪みゲージ4が固定されている。
【0073】
本実施例においては、本体部50は、クラッシュボックス3から離反する方向に変形を生じる。本実施例においても、実施例1の湾曲形状と同様に、歪みゲージ4が固定された起歪体5の本体部50の変形方向が一定となっている。そして、本実施例においても、歪みゲージ4が測定する本体部50の歪みの方向が一定に規制されている。つまり、本実施例の衝突検知手段は、歪みゲージ4の出力信号の正負の方向が一定となり、検出誤差が生じにくくなっている。つまり、本実施例の衝突検知手段は、検出精度にすぐれた衝突検知手段となっている。
【0074】
(実施例5)
本実施例は、起歪体5の本体部50の断面形状が異なる以外は、実施例4と同様な構成の衝突検知手段である。
【0075】
本実施例の起歪体5の本体部50は、帯状の幅方向での断面(車両の上下方向での断面)が図10に示したように、クラッシュボックス3に対向した内表面がなめらかな凸状をなすように形成されている。そして、外表面も内表面の湾曲形状にそった湾曲形状に形成されている。つまり、起歪体5の本体部50は、帯状の幅方向での断面が内表面方向に突出した弧状をなすように形成されている。本体部50は、車両の上下方向での断面が非対称な形状に形成されている。本実施例の本体部50は、実施例1の起歪体5の本体部50の内表面が本実施例の本体部50の外表面をなし、実施例2の起歪体5の本体部50の外表面が本実施例の本体部50の内表面をなすような形状に形成されている。本実施例の起歪体5の構成を示した図10は、実施例4の起歪体5の本体部50の断面を示した図9に対応した断面図である。
【0076】
本実施例においても、実施例4の時と同様に、歪みゲージ4が固定された起歪体5の本体部50の変形方向がクラッシュボックス3から離反する方向に一定となっており、歪みゲージ4が測定する本体部50の歪みの方向が圧縮する方向に規制されている。つまり、本実施例の衝突検知手段は、歪みゲージ4の出力信号の正負の方向が一定となり、検出誤差が生じにくくなっている。つまり、本実施例の衝突検知手段は、検出精度にすぐれた衝突検知手段となっている。
【0077】
(実施例6)
本実施例は、起歪体5の本体部50の断面形状が異なる以外は、実施例4と同様な構成の衝突検知手段である。
【0078】
本実施例の起歪体5の本体部50は、帯状の幅方向での断面(車両の上下方向での断面)が図11に示したように、帯状の幅方向で金属板を略コ字状に曲成してなる構成を有している。そして、本体部50は、略コ字状の開口端部がクラッシュボックス3から離反する方向に突出している。本体部50は、車両の上下方向での断面が非対称な形状に形成されている。
【0079】
本実施例においても、実施例4の時と同様に、歪みゲージ4が固定された起歪体5の本体部50の変形方向が一定となっており、歪みゲージ4が測定する本体部50の歪みの方向が一定に規制されている。つまり、本実施例の衝突検知手段は、歪みゲージ4の出力信号の正負の方向が一定となり、検出誤差が生じにくくなっている。つまり、本実施例の衝突検知手段は、検出精度にすぐれた衝突検知手段となっている。
【0080】
(実施例7)
本実施例は、起歪体5の本体部50の形状が異なる以外は、実施例1と同様な構成の衝突検知手段である。本実施例の起歪体5の構成を図11に示した。
【0081】
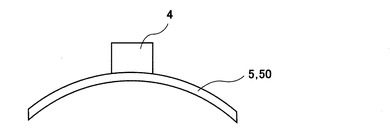
本実施例の起歪体5の本体部50は、帯状の長手方向での断面(車両の前後方向での断面)が図12に示したように、中央部がクラッシュボックス3から離反する方向に突出した弧状をなすように形成されている。また、本体部50は、略帯状の部材を湾曲させて形成されており、幅方向での厚さは一定である。つまり、上記の各実施例においては、帯状の幅方向(車両の上下方向)での断面が湾曲した形状に形成されているが、本実施例は帯状の長手方向での断面が湾曲した形状に形成されている。
【0082】
そして、本実施例においては、本体部50の外表面に歪みゲージ4が固定されている。
【0083】
本実施例においては、起歪体5は、本体部50がクラッシュボックス3から離反する方向に変形を生じる。本実施例においても、歪みゲージ4が固定された起歪体5の本体部50の変形方向が一定となっている。そして、本実施例においても、歪みゲージ4が測定する本体部50の歪みの方向が一定に規制されている。つまり、本実施例の衝突検知手段は、歪みゲージ4の出力信号の正負の方向が一定となり、検出誤差が生じにくくなっている。つまり、本実施例の衝突検知手段は、検出精度にすぐれた衝突検知手段となっている。
【0084】
(実施例8)
本実施例は、起歪体5の固定される位置が異なる以外は、実施例1と同様な構成の衝突検知手段である。本実施例の衝突検知手段の構成を図13に示した。本実施例の構成を示す図13は、クラッシュボックス3およびバンパリンフォースメント1近傍の構成を示した。
【0085】
本実施例の起歪体5は、図13に示したように、車両前方側に位置する一方の端部510がバンパリンフォースメント1に、車両後方側に位置する他方の端部511がクラッシュボックス3に固定されている。起歪体5は、本体部50の長手方向の両端に脚部510,511が垂直にもうけられ、脚部510,511からそれぞれ略コ字状の開口から外側に広がるようにフランジ52,52を有しており、このフランジ部520,521を貫通したねじで固定された。
【0086】
そして、起歪体5の本体部50は、車両前後方向に直交する断面が実施例1の時と同様に凹レンズ状をなすように形成されている。
【0087】
本実施例は、起歪体5の一方の脚部510の固定される相手部材が異なる以外は実施例1と同様な構成である。本実施例においても、衝突によりクラッシュボックス3に歪みが生じることで、起歪体5の両端部510,511間の距離が変化して起歪体5の本体部50に歪みが発生する。本体部50の断面形状が上記の実施例1のときと同様であり、実施例1の時と同様に本体部50がクラッシュボックス3に接近する方向に歪みが生じる。つまり、本実施例の衝突検知手段は、実施例1の時と同様な効果を発揮できる。
【0088】
(実施例8の変形形態)
実施例8は、起歪体5の形態が異なる以外は実施例1と同様な構成の衝突検知手段であり、起歪体5の本体部50を、実施例2〜7の本体部50と同様な形態としてもよい。
【0089】
(実施例9)
本実施例は、起歪体5の形態が異なる以外は、実施例1と同様な構成の衝突検知手段である。本実施例の衝突検知手段の構成を図14に示した。
【0090】
本実施例の起歪体5は、図14に示したように、長手方向が車両前後方向に伸びた略帯状を有している。そして、両端部53,53がクラッシュボックス3に固定されている。起歪体5は、両端部53,53を貫通したねじで固定された。起歪体5は、内表面がクラッシュボックス3に密着した状態で固定された。本実施例は、上記の各実施例のフランジ部52と脚部51とが一体になった構成を有している。
【0091】
そして、起歪体5の本体部50は、帯状の幅方向での断面(車両の上下方向での断面)が図15に示したように、クラッシュボックス3に対向した内表面が平面をなし、内表面に背向した外表面がなめらかにくぼんだ形状に形成されている。つまり、本体部50は、車両の上下方向での断面が非対称な形状に形成されている。ここで、起歪体5の本体部50の断面を示した図15は、図14中のIII−III面での断面図である。
【0092】
そして、歪みゲージ4は、起歪体5の本体部50の外表面に固定されている。
【0093】
本実施例は、起歪体5の形態が異なる以外は実施例1と同様な構成である。本実施例においても、衝突によりクラッシュボックス3に歪みが生じることで、起歪体5の両端部51,51間の距離が変化して起歪体5の本体部50に歪みが発生する。本実施例は本体部50の断面形状が実施例1の時と逆に形成されており、本体部50がクラッシュボックス3から離反する方向に歪みが生じる。つまり、本実施例の衝突検知手段は、歪みゲージ4の出力信号の正負の方向が一定となり、検出誤差が生じにくくなっている。つまり、本実施例の衝突検知手段は、検出精度にすぐれた衝突検知手段となっている。
【0094】
(その他の変形形態)
上記の各実施例においては、起歪体5がクラッシュボックス3の側面に固定されているが、側面だけでなく、上面や下面に固定する形態としてもよい。
【0095】
また、クラッシュボックス3の起歪体5の両端部51,51にはさまれた部分を歪みの生じやすい構成としてもよい。このような構成としては、たとえば、部分的に薄肉化するなどの方法をあげることができる。このような構成とすることで、衝突時にこの部分の歪みが大きくなり、衝突の衝撃が小さくても衝突の検知を行うことができる。
【図面の簡単な説明】
【0096】
【図1】実施例1の衝突検知システムの構成を示した図である。
【図2】実施例1の衝突検知システムのクラッシュボックス近傍の構成を示した断面図である。
【図3】実施例1の衝突検知システムの起歪体の断面図である。
【図4】実施例1の衝突検知システムの起歪体の断面図である。
【図5】実施例1の衝突検知システムをもつ歩行者保護手段の構成を示した図である。
【図6】実施例2の衝突検知システムの起歪体の断面図である。
【図7】実施例3の衝突検知システムの起歪体の断面図である。
【図8】実施例4の衝突検知システムのクラッシュボックス近傍の構成を示した断面図である。
【図9】実施例4の衝突検知システムの起歪体の断面図である。
【図10】実施例5の衝突検知システムの起歪体の断面図である。
【図11】実施例6の衝突検知システムの起歪体の断面図である。
【図12】実施例7の衝突検知システムのクラッシュボックス近傍の構成を示した断面図である。
【図13】実施例8の衝突検知システムのクラッシュボックス近傍の構成を示した断面図である。
【図14】実施例9の衝突検知システムのクラッシュボックス近傍の構成を示した断面図である。
【図15】実施例9の衝突検知システムの起歪体の断面図である。
【図16】従来の衝突検知手段の起歪体の変形を示した図である。
【図17】従来の衝突検知手段の起歪体の変形を示した図である。
【符号の説明】
【0097】
1:バンパリンフォースメント
2:サイドメンバ
3:クラッシュボックス
4:歪みゲージ
5:起歪体
6:アブソーバ
【特許請求の範囲】
【請求項1】
車両左右方向に延在するように配置されたバンパリンフォースメントと、
該バンパリンフォースメントに結合して車両前後方向に延在するように配置されるサイドメンバまたはクラッシュボックスである側方支持部材と、
該側方支持部材に生じる歪みを検出する歪み検出手段と、
車両前後方向に延在する略板形状を有し該歪み検出手段が固定される本体部と、該本体部にもうけられ該バンパリンフォースメントまたは該側方支持部材に固定される一の固定部と、該本体部にもうけられ該側方支持部材に固定される他の固定部と、を有する起歪体と、
を有する衝突検知手段において、
該本体部は、車両前後方向または車両前後方向に垂直な面で切った断面が車両の上下方向に非対称な形状となるように形成されていることを特徴とする衝突検知手段。
【請求項2】
前記起歪体の前記本体部は、車両前後方向に垂直な面で切った断面が、前記バンパリンフォースメントまたは前記側方支持部材に対向する一方の表面、または該一方の表面に背向する他方の表面が、背向する表面方向にくぼんだ凹をなす断面形状を有する請求項1記載の衝突検知手段。
【請求項3】
前記起歪体の前記本体部は、車両前後方向に垂直な面で切った断面形状が、略コ字状をなすように曲成された請求項1記載の衝突検知手段。
【請求項4】
前記起歪体の前記本体部は、車両前後方向に沿った面で切った断面が、前記バンパリンフォースメントまたは前記側方支持部材に対向する一方の表面、または該一方の表面に背向する他方の表面が、背向する表面方向にくぼんだ凹をなす断面形状を有する請求項1記載の衝突検知手段。
【請求項5】
請求項1〜4のいずれかに記載の衝突検知手段と、
該衝突検知手段が組み付けられた車両と歩行者の衝突時に、該歩行者を保護する保護手段と、
該衝突検知手段の出力信号が入力され、該出力信号に基づいて衝突物の判定を行う衝突判定手段と、
該衝突判定手段が該衝突物が歩行者であると判定したときに該保護手段を作動させる起動手段と、
を有することを特徴とする保護システム。
【請求項1】
車両左右方向に延在するように配置されたバンパリンフォースメントと、
該バンパリンフォースメントに結合して車両前後方向に延在するように配置されるサイドメンバまたはクラッシュボックスである側方支持部材と、
該側方支持部材に生じる歪みを検出する歪み検出手段と、
車両前後方向に延在する略板形状を有し該歪み検出手段が固定される本体部と、該本体部にもうけられ該バンパリンフォースメントまたは該側方支持部材に固定される一の固定部と、該本体部にもうけられ該側方支持部材に固定される他の固定部と、を有する起歪体と、
を有する衝突検知手段において、
該本体部は、車両前後方向または車両前後方向に垂直な面で切った断面が車両の上下方向に非対称な形状となるように形成されていることを特徴とする衝突検知手段。
【請求項2】
前記起歪体の前記本体部は、車両前後方向に垂直な面で切った断面が、前記バンパリンフォースメントまたは前記側方支持部材に対向する一方の表面、または該一方の表面に背向する他方の表面が、背向する表面方向にくぼんだ凹をなす断面形状を有する請求項1記載の衝突検知手段。
【請求項3】
前記起歪体の前記本体部は、車両前後方向に垂直な面で切った断面形状が、略コ字状をなすように曲成された請求項1記載の衝突検知手段。
【請求項4】
前記起歪体の前記本体部は、車両前後方向に沿った面で切った断面が、前記バンパリンフォースメントまたは前記側方支持部材に対向する一方の表面、または該一方の表面に背向する他方の表面が、背向する表面方向にくぼんだ凹をなす断面形状を有する請求項1記載の衝突検知手段。
【請求項5】
請求項1〜4のいずれかに記載の衝突検知手段と、
該衝突検知手段が組み付けられた車両と歩行者の衝突時に、該歩行者を保護する保護手段と、
該衝突検知手段の出力信号が入力され、該出力信号に基づいて衝突物の判定を行う衝突判定手段と、
該衝突判定手段が該衝突物が歩行者であると判定したときに該保護手段を作動させる起動手段と、
を有することを特徴とする保護システム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【公開番号】特開2008−201272(P2008−201272A)
【公開日】平成20年9月4日(2008.9.4)
【国際特許分類】
【出願番号】特願2007−39867(P2007−39867)
【出願日】平成19年2月20日(2007.2.20)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
【公開日】平成20年9月4日(2008.9.4)
【国際特許分類】
【出願日】平成19年2月20日(2007.2.20)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
[ Back to top ]