
衝突検知装置を備えた自動車用バンパ装置
【課題】圧力センサのダイナミックレンジを拡大した自動車用バンパ装置の提供。
【解決手段】本発明の衝突検知装置14を備えた自動車用バンパ装置10は、バンパリインホースメント12とバンパカバー13との間に配置されたバンパアブソーバ11と、バンパアブソーバ11の上側に配置された圧力チャンバ14Aおよび該圧力チャンバに接続された圧力センサ14Bとを有する衝突検知装置14と、を備えている。バンパアブソーバ11内には車両幅方向に延びるダイラタント特性を有するシート状部材20が配置されている。ダイラタント特性シート状部材20はバンパアブソーバ11内で圧力チャンバ14A側に寄せて配置されている。この構造によって、圧力センサ14Bのダイナミックレンジがアブソーバのみの場合のLcからLpに拡大され、車両衝突か否かが早いタイミングで判定できる。
【解決手段】本発明の衝突検知装置14を備えた自動車用バンパ装置10は、バンパリインホースメント12とバンパカバー13との間に配置されたバンパアブソーバ11と、バンパアブソーバ11の上側に配置された圧力チャンバ14Aおよび該圧力チャンバに接続された圧力センサ14Bとを有する衝突検知装置14と、を備えている。バンパアブソーバ11内には車両幅方向に延びるダイラタント特性を有するシート状部材20が配置されている。ダイラタント特性シート状部材20はバンパアブソーバ11内で圧力チャンバ14A側に寄せて配置されている。この構造によって、圧力センサ14Bのダイナミックレンジがアブソーバのみの場合のLcからLpに拡大され、車両衝突か否かが早いタイミングで判定できる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、衝突検知装置を備えた自動車用バンパ装置(以下、単に、「自動車用バンパ装置」ともいう)に関し、とくに歩行者衝突と車両衝突との識別が可能な自動車用バンパ装置に関する。
【背景技術】
【0002】
特許文献1は、バンパリインホースメントとバンパカバーとの間に配置されたバンパアブソーバと、バンパアブソーバの上方に隣接して配置された圧力チャンバおよび圧力チャンバの圧力変化を検出する圧力センサを有する衝突検知装置と、を有する自動車用フロントバンパ装置を開示している。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2009−018734号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1に開示の自動車用バンパ装置にはつぎの課題がある。
すなわち、歩行者衝突検知用の圧力センサにおいて衝突荷重検知用閾値が歩行者検知用のみに設定されており、圧力センサの識別可能荷重範囲(以下、「ダイナミックレンジ」という)が狭いので圧力センサのダイナミックレンジに歩行者検知用閾値に加えて車両衝突検知用閾値を設定するのが困難である。圧力センサが衝突を検知すると、車両衝突であろうが歩行者衝突であろうが歩行者保護デバイスを作動させている。そのため、実際は車両衝突であって歩行者保護デバイスを作動させる必要がない場合でも歩行者保護デバイス、たとえば歩行者保護用エアバッグやポップアップフードを不要に作動させている。
【0005】
本発明の目的は、圧力センサのダイナミックレンジを拡大した自動車用バンパ装置を提供することにある。
【課題を解決するための手段】
【0006】
上記目的を達成する本発明はつぎのとおりである。
(1) 本発明の衝突検知装置を備えた自動車用バンパ装置は、バンパリインホースメントとバンパカバーとの間に配置されたバンパアブソーバと、バンパアブソーバの上側に配置された圧力チャンバおよび該圧力チャンバに接続された圧力センサとを有する衝突検知装置と、を備えている。バンパアブソーバ内には車両幅方向に延びるダイラタント特性を有するシート状部材が配置されている。
【0007】
(2) 上記(1)の自動車用バンパ装置において、圧力センサが歩行者衝突を判定する第1の荷重閾値と第1の荷重閾値より大きい車両衝突を判定する第2の荷重閾値を有し、第2の荷重閾値が、圧力センサのダイナミックレンジのうちバンパアブソーバ内にダイラタント特性シート状部材を配置したことにより拡大された部分に設定されている。
【0008】
(3) 上記(1)または(2)の自動車用バンパ装置において、ダイラタント特性シート状部材はバンパアブソーバ内で圧力チャンバ側に寄せて配置されている。
【0009】
(4) 上記(1)〜(3)の何れか1つの自動車用バンパ装置において、ダイラタント特性シート状部材は車両前後方向に互いに間隔をもたせて複数段配置されており、前側のダイラタント特性シート状部材の上下方向幅はそれより後側のダイラタント特性シート状部材の上下方向幅以下であり、正面視で前側のダイラタント特性シート状部材はそれより後側のダイラタント特性シート状部材にオーバラップしている。
【発明の効果】
【0010】
上記(1)の自動車用バンパ装置によればつぎの効果が得られる。
衝突検知装置が圧力チャンバと圧力センサを含み、バンパアブソーバ内には車両幅方向に延びるダイラタント特性シート状部材が配置されているので、歩行者または相手車両との高速衝突時にはアブソーバ変形の影響がダイラタント特性シート状部材に及んだ時にそのダイラタント特性シート状部材が瞬時に硬化する。その結果、図3の荷重対チャンバ圧力および荷重対アブソーバ変形で、アブソーバ変形Dが第1屈曲点a以上の変形領域、すなわちチャンバ圧力が第1屈曲点a以上の圧力領域では、荷重対チャンバ圧力特性Aがダイラタント特性シート状部材が無いアブソーバのみの場合の荷重対チャンバ圧力特性Rに比べて大きな勾配をもって立ち上がる。これによって、圧力センサのダイナミックレンジが特性Rの場合のLcから特性Aの場合のLpに拡大される。
また、大きな勾配の荷重対チャンバ圧力特性Aにより、アブソーバのみの場合の荷重対チャンバ圧力特性Rよりもチャンバ圧力が小さいタイミングで同じ荷重閾値(L1またはL2)に達することができ、したがって衝突時の早いタイミング(P1またはP2)で、歩行者衝突のセンシング、および歩行者衝突か車両衝突かの判定が可能となる。
【0011】
上記(2)の自動車用バンパ装置によれば、圧力センサが車両衝突を判定する第2の荷重閾値(L2)を有し、第2の荷重閾値がダイラタント特性シート状部材の設置により拡大されたダイナミックレンジ部分(LpがLcより大の部分)に設定されているので、第2の荷重閾値L2が第1の荷重閾値L1から離れ、車両衝突のセンシングと歩行者衝突のセンシングとを別々に行うことができる。その結果、歩行者衝突だけでなく、歩行者衝突と車両衝突との識別も行うことができる。
また、拡大されたダイナミックレンジ部分において特性Aが特性Rより大きな勾配で立ち上がるため、車両衝突のセンシングを行うチャンバ圧力P2を、アブソーバのみの場合の歩行者衝突のセンシングを行うチャンバ圧力P3より早いタイミングに設定でき、衝突後早期の段階で衝突が車両衝突か否かの判定が可能となる。その結果、歩行者衝突センシング後車両衝突をセンシングした場合に歩行者保護デバイスが作動する前に歩行者保護デバイスを作動させる指令をOFFすることにより、歩行者保護デバイスが不要に作動することがなくなる。
【0012】
上記(3)の自動車用バンパ装置によれば、ダイラタント特性シート状部材がバンパアブソーバ内で圧力チャンバ側に寄せて配置されているので、歩行者衝突を車両衝突と誤判定することが防止される。詳しくは、歩行者衝突時には歩行者が自動車のフード側に倒れていくので、ダイラタント特性シート状部材を圧力チャンバに寄せて配置しておかないとアブソーバの上部のつぶれ量が大きくなり、圧力チャンバのつぶれが大きくなると、車両衝突と誤判定する可能性がある。しかし、ダイラタント特性シート状部材がバンパアブソーバ内で圧力チャンバ側に寄せて配置されているので、この誤判定がなくなる。
【0013】
上記(4)の自動車用バンパ装置によれば、ダイラタント特性シート状部材が車両前後方向に互いに間隔をもたせて複数段配置されているので、荷重対チャンバ圧力特性が多段に変化しチャンバ圧力が大きい領域ほど勾配が大きくなる特性となり、ダイラタント特性シート状部材が1段だけ設けられる場合に比べて、ダイナミックレンジLpをより拡大できる。
【図面の簡単な説明】
【0014】
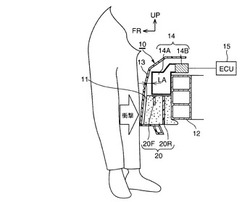
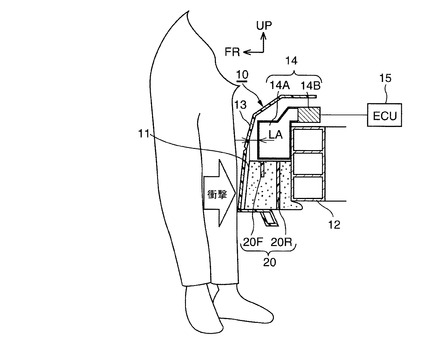
【図1】本発明の実施例に係る自動車用バンパ装置の側面視方向断面図である。
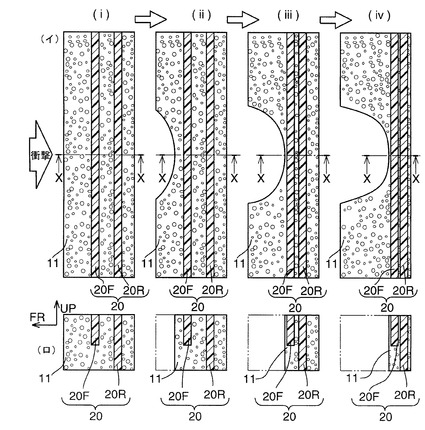
【図2】本発明の実施例に係る自動車用バンパ装置の、衝突時の各段階(i)〜(iv)におけるバンパアブソーバの変形とダイラタント特性シート状部材のアブソーバ内位置を示す、(イ) はバンパアブソーバの平面視断面図、および(ロ)は(イ)のX−X断面図である。
【図3】本発明の実施例に係る自動車用バンパ装置の圧力センサ検出荷重LP対チャンバ圧力P特性図A、およびバンパアブソーバ変形荷重LD対バンパアブソーバ変形D特性図Aである。
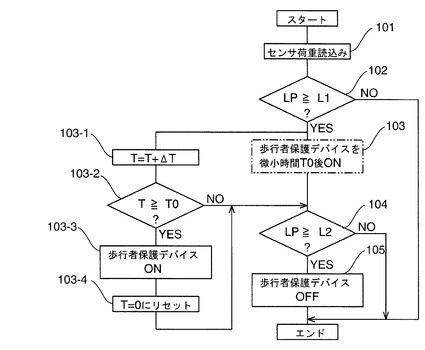
【図4】本発明の実施例に係る自動車用バンパ装置の制御ルーチン図である。
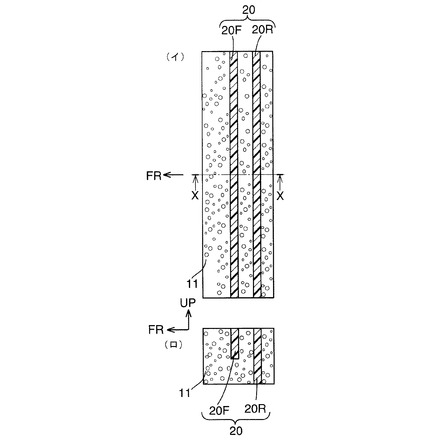
【図5】本発明の実施例に係る自動車用バンパ装置の、(イ)は平面視断面図、および(ロ)は(イ)のX−X断面図である。
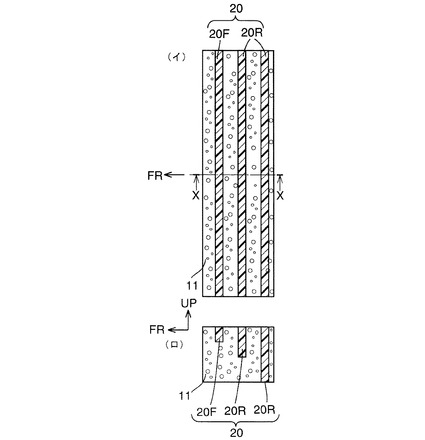
【図6】本発明の実施例の変形例に係る自動車用バンパ装置の、(イ)は平面図、および(ロ)は(イ)のX−X断面図である。
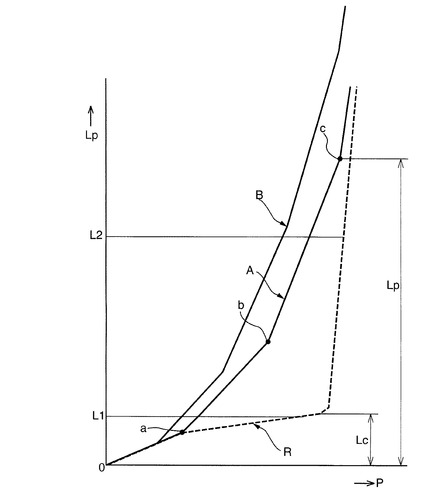
【図7】本発明の実施例とその変形例に係る自動車用バンパ装置の圧力センサ検出荷重(LP)対チャンバ圧力(P)特性図A、Bである。
【発明を実施するための形態】
【0015】
本発明の実施例とその変形例に係る衝突検知措置を備えた自動車用バンパ装置を、図1〜図7を参照して説明する。
図1〜図5は本発明の実施例を示し、図6は本発明の実施例の変形例を示し、図7は実施例と変形例の特性を示す。
本発明の実施例とその変形例にわたって共通する構造部分には、本発明の実施例とその変形例にわたって互いに同じ符号を付してある。
図中、FRは車両前後方向後方を示し、UPは上方を示す。
【0016】
<本発明の実施例>
〔全体構成〕
本発明の実施例に係る衝突検知装置を備えた自動車用バンパ装置10は、図1〜図5に示すように、バンパリインホースメント12とバンパカバー13との間に配置されたバンパアブソーバ(以下、単にアブソーバともいう)11と、衝突検知装置14と、衝突検知装置14に電気的に接続された車両搭載コンピュータ(ECU)15と、を備えている。衝突検知装置14は、アブソーバ11の上側に配置された圧力チャンバ14Aと、圧力チャンバ14Aに接続された圧力センサ14B、とを有する。圧力チャンバ14Aはバンパリインホースメント12とバンパカバー13との間に配置される。
アブソーバ11内にはダイラタント特性を有するシート状部材(以下、ダイラタント特性シート状部材、またはシート状部材という)20が配置されている。
【0017】
アブソーバ11は発泡ウレタンからなり、衝突時に衝突荷重とアブソーバ11の変形の積から求まる衝突エネルギの一部を吸収する。
バンパリインホースメント12は、アルミ合金の押し出し材からなり、車両幅方向に直線状に延び両端部が車両後方に斜めに曲げられた形状を有し、車両幅方向両端部で車両のサイドメンバに溶接等により固定されている。
バンパカバー13は樹脂製であり、衝突時に衝突物に押されてアブソーバ11側および圧力チャンバ14A側に変形する。衝突物は歩行者衝突の場合は歩行者、車両衝突の場合は相手車両である。
【0018】
圧力チャンバ14Aは樹脂製の可撓性袋体からなる。衝突時、圧力チャンバ14Aはバンパカバー13に押されて変形し変形に比例してチャンバ圧力が上昇する。圧力チャンバ14Aは衝突エネルギの一部を吸収することを目的とする部材ではない。
圧力センサ14Bは、圧力チャンバ14A内圧力を検知する圧力方式センサからなる。圧力センサ14Bは、圧力チャンバ14A内圧を検知し、該圧力チャンバ14A内圧から衝突荷重LPを検知し、検知荷重LPに対応する電気信号をコンピュータ15に送信する。
【0019】
図2に示すように、ダイラタント特性シート状部材20はアブソーバ11内に車両前後方向に1段以上配置されている。
ダイラタント特性シート状部材20の長手方向はアブソーバ11内で車両幅方向に向けられており、ダイラタント特性シート状部材20の幅方向は上下方向に向けられており、ダイラタント特性シート状部材20の厚み方向は車両前後方向に向けられている。
【0020】
図1および図5に示すように、ダイラタント特性シート状部材20はアブソーバ11内で圧力チャンバ14A側に寄せて配置されている。望ましくは、ダイラタント特性シート状部材20の上端部はアブソーバ11の上端部に位置する。
【0021】
図5に示すように、ダイラタント特性シート状部材20がアブソーバ11内に前後方向に互いに間隔をもたせて複数段に、配置されている場合、前側のダイラタント特性シート状部材20Fはそれより後側のダイラタント特性シート状部材20Rよりもシート状部材20の幅方向中心位置を上側にずらして配置されている。
【0022】
望ましくは、前側のダイラタント特性シート状部材20Fの上下方向幅はそれより後側のダイラタント特性シート状部材20Rの上下方向幅以下であり、正面視で前側のダイラタント特性シート状部材20Fはそれより後側のダイラタント特性シート状部材20Rにオーバラップしている。
【0023】
〔ダイラタント特性シート状部材〕
ダイラタント特性シート状部材20は、直接アブソーバ11内に埋設されてもよいし、あるいは樹脂製または布製または樹脂コーティングされた布製等からなる袋状で可撓性を有する包囲体で包んでまたは包囲体の中に充填した状態でアブソーバ11内に埋設されてもよい。包囲体自体はダイラタント特性を有しない。
【0024】
ダイラタント特性とは、衝撃時以外では可撓性を有し、たとえばゲル状で、衝撃がかかった時には瞬時に粘性を増して固体状となり、休止状態で再び元の可撓性、たとえばゲル状を取り戻す特性をいう。ダイラタント特性シート状部材20は、力が低速で加わるか力が加わらない休止状態の下では可撓性を有し、たとえばゲル状であり、高速で力が加わるすなわち衝撃力が加わると瞬時に剛性が増して固体エラストマとして振る舞い、衝撃エネルギを吸収し消散させる。
【0025】
ダイラタント特性シート状部材20の一部分に衝撃力が加わった場合でも、その衝撃力が加わった部分のみならず、その衝撃力が伝達された部分および急激に変形する部分も瞬時に剛性が増して固体エラストマとして振る舞う。ダイラタント特性シート状部材20が長手方向の一部に衝撃力を受けても、その衝撃がその段のダイラタント特性シート状部材20のほぼ全域に伝わるので、その段のダイラタント特性シート状部状部材20のほぼ全域が瞬時に硬化し固体エラストマとなる。
【0026】
ダイラタント特性シート状部材20には、たとえば英国のd3oTMlab社が製造し、市販されている、公知のd3oTM材を使用することができる。「d3o」は登録商標でディースリーオーと呼ぶ。d3oTMは樹脂を主成分とする。図示例ではダイラタント特性シート状部材20がd3oTM材のシートからなる場合を示している。d3oTM材は、受ける衝撃の強さで分子の結束が変化する。強い衝撃を受けると瞬時に分子同士が結束して固体状となり、衝撃が吸収、消散され、エネルギの多くが熱に変換される。衝撃力がかからなくなると分子の結束が解かれ元の柔軟な状態に戻る。d3oTM材からなるダイラタント特性シート状部材20はオレンジ色の粘度状物で垂直姿勢をとってもシート形状を維持できるので、ダイラタント特性シート状部材20を可撓性包囲体で包囲することなく直接、アブソーバ11内に埋設することができる。ただし、d3oTM材シートを袋状の可撓性包囲体で包囲してアブソーバ11内に埋設してもよい。
【0027】
ダイラタント特性シート状部材20の厚さは、d3oTM材シートの場合、約3mm〜7mmあれば前突時の衝突物の衝撃を受けてシート状部材20全域が硬化し、硬化した直線状のシート状部材20でそれより後方のアブソーバ11を全面積で後方に押すことができる。シート状部材20が7mm厚であってもアブソーバ11の容積はほとんど減少せず、アブソーバ11の衝撃吸収能力をほとんど減少させない。
また、ダイラタント特性シート状部材20を構成するd3oTM材シートは1枚のシートから構成されてもよいし、数枚のシートを重ねたものから構成されてもよい。数枚のシートを重ねて構成する場合、総計の厚さが約3mm〜7mmあればよい。d3oTM材シートのアブソーバ大きさへの切断は、d3oTM材シートが硬化していない状態で行う。
【0028】
ダイラタント特性シート状部材20は、d3oTM材シートに代えて、樹脂シート、樹脂フィルム、樹脂コーティング布などからなる袋状の包囲体とその中に充填されたダイラタント特性を有する材料から構成されてもよい。その場合、ダイラタント特性を有する材料を中に充填した包囲体は全体として見ればほぼ一定厚さをもつシート状部材である。ダイラタント特性を有する材料を挟んで対向する包囲体の2面は複数箇所で熱融着などにより互いに結合されており、それによってダイラタント特性シート状部材20は一定厚を保持する。
【0029】
ダイラタント特性を有する材料は、荷重がかかっていない状態でゲル状であり、ダイラタント特性を示すポリマ組成物、および潤滑剤と充填剤を含む。
ダイラタント特性を示すポリマ組成物は、ポリボロシロキサン、キサンタンガム、ガーゴムおよびポリビニルアルコール四ホウ酸ナトリウムよりなる群から選択された1種以上のポリマである。このポリマ組成物、たとえばポリボロシロキサンは、低速で力が印加されると容易に変形し、高速で力が加わると瞬時に粘性が増加して固体ポリマとなり衝撃エネルギを吸収する。固体ポリマを休止状態にすると元のゲル状態にゆるやかに復帰する。
潤滑剤は、たとえば炭化水素系グリースまたは流体であり、充填剤は、微小粒または粉末のプラスチック、セラミック、金属または繊維材料である。
【0030】
ダイラタント特性を示すポリマ組成物、潤滑剤、充填剤の混合割合は、重量百分率で、上記ポリマを90%乃至20%未満、上記潤滑剤を20%未満(たとえば、10%)乃至60%以上(たとえば、80%)、上記充填剤を0%乃至90%を含む。それらの混合割合を調整することによりダイラタント特性の粘性、可撓性を調整できる。高速衝突時に硬化し低速衝突時に良好な可撓性を示す混合割合の一例を挙げると、70%のポリボロシロキサン、20%の潤滑剤および10%の充填剤である。ただし、この配合割合に限るものではない。
以上では、ダイラタント特性を示す材料として、d3oTMと、包囲体の中に充填されたダイラタント特性を示すポリマ組成物からなるシートを示したが、これらと同様の構成、作用をもつものであれば、使用可能である。
【0031】
〔図3における荷重対チャンバ圧力特性、および荷重対アブソーバ変形特性〕
歩行者および/または車両との衝突時における、圧力センサ14Aが検知するアブソーバ11に掛かる荷重LPと圧力チャンバ14Bのチャンバ圧力Pとの関係を表すLP対P特性A、および、アブソーバ11に掛かる荷重LDとアブソーバ11の変形Dとの関係を表すLD対D特性A’(A’とAとは大部分で一致するので、A’を以下Aという)を、図3に示す。LP対P特性AとLD対D特性Aとは、圧力チャンバ14Aの圧力Pおよびアブソーバ11の変形Dを介して互いに関連するので、原点を互いにずらすことにより1つの図で表せる。LP対P特性Aの原点は、LD対D特性Aの原点に対して、変形D方向に、圧力チャンバ14Aの前端面とアブソーバ11の前端面との間の距離DA(図1)だけずれており、圧力P方向に、LD対D特性におけるDAでの荷重値LAだけずれている。
【0032】
圧力チャンバ14Aの前端面はアブソーバ11の前端面より後方にあることが望ましい。これはアブソーバ11変形が生じない程度の軽い衝突で圧力チャンバ14Aが作動するのを防止するためである。
ただし、圧力チャンバ14Aの前端面はアブソーバ11の前端面と車両前後方向に同じ位置か、またはアブソーバ11の前端面より前方にあってもよい。
【0033】
図3は、圧力チャンバ14Aの前端面がアブソーバ11の前端面より後方にある場合で示している。
図3において、衝突時のバンパカバー13の変形がアブソーバ11に達しアブソーバ11が変形を起こし始める点がD=0、LD=0である。アブソーバ11の変形Dの増大とともに荷重LDも増大していく。アブソーバ11の変形DがDA(圧力チャンバ14Aの前端面とアブソーバ11の前端面との距離)になると、圧力センサ14Bが変形し始め、圧力センサ14Bの変形とともにチャンバ圧力Pが増大しセンサ検出荷重LPが増大していく。
【0034】
圧力チャンバ14Aの前端面がアブソーバ11の前端面より前方にある場合は、図3で圧力チャンバ14Aの変形開始点DAがLD対Dグラフの横軸上で原点Oより左側に来て、LP対P特性AはDAから変形を始め、LD対D特性の原点を通った後、第1屈曲点aに向かって立ち上がっていくことになる。
また、圧力チャンバ14Aの前端面がアブソーバ11の前端面と車両前後方向に同じ位置にある場合は、図3で圧力チャンバ14Aの変形開始点DAがLD対Dグラフの原点Oに来て、LP対P特性AはLD対D特性の原点から第1屈曲点aに向かって立ち上がっていくことになる。
【0035】
図3では、ダイラタント特性シート状部材20がある場合のLD対D特性をAで示し、ダイラタント特性シート状部材20がない場合のLD対D特性をRで示してある。また、ダイラタント特性シート状部材20がある場合のLP対P特性をAで示し、ダイラタント特性シート状部材20がない場合のLP対P特性をRで示してある。LD対D特性AとLP対P特性AとはLD対D特性AのDA、LA以上の領域で互いに一致し、LD対D特性RとLP対P特性RとはLD対D特性RのDA、LA以上の領域で互いに一致する。
【0036】
LD対D特性AおよびLP対P特性Aにおいて、第1屈曲点aは最前のダイラタント特性シート状部材20が瞬時に硬化する点である。LD対D特性AおよびLP対P特性Aにおいて、それぞれのグラフの原点から第1屈曲点aまでは、特性Aと特性Rは同一の線を描き、第1屈曲点aを越えると、特性Aは特性Rより大きな勾配で立ち上がっていく。
【0037】
図3に示すように、センサ検出荷重LP対チャンバ圧力P特性Aは、アブソーバ11内にダイラタント特性シート状部材20が配置されていることにより、ダイラタント特性シート状部材20が配置されていないアブソーバのみの場合のLP対P特性RのダイナミックレンジLcに比べて拡大されたダイナミックレンジLpを有する。これにより、後述するように、歩行者衝突および車両衝突の早期センシングが可能になり、歩行者衝突か車両衝突かの識別が可能になる。
【0038】
〔図2における衝突時のアブソーバ変形、および図2の変形と図3の特性との関係〕
ダイラタント特性シート状部材20が車両前後方向に多段に配置されたアブソーバ11における、歩行者および/または車両との衝突時における、アブソーバ11の変形とアブソーバ11内におけるダイラタント特性シート状部材20の変位は、図2に示すようになる。図2の変形と図3の特性との関係は以下のとおりである。
【0039】
図2および図3において、衝突物がバンパカバー13を介してアブソーバ11に当たった時がD=0、LD=0で、アブソーバ11の変形DがDAになって衝突物がバンパカバー13を介して圧力チャンバ14Aに当たった時がP=0、LP=0である。
さらに詳しくは、図2の(i)は衝突直前で、アブソーバ11が変形していない。この状態は、図3ではLD対D特性Aの原点O上にある。
【0040】
図2の(ii)は、衝突後でアブソーバ変形Dが初期の段階で、アブソーバ11が衝突物の外形に倣って局部的に変形し、変形の先端が前側のダイラタント特性シート状部材20Fの直前位置に達する迄を示す。この時はダイラタント特性シート状部材20はまだ硬化前の段階にある。この状態は、図3では、LD対D特性Aにおいて原点Oと第1屈曲点aとの間にある。第1屈曲点aまでは、LD対D特性Aはダイラタント特性シート状部材20がないアブソーバのみの場合のLD対D特性Rと同じ線上にあり、LP対P特性Aもダイラタント特性シート状部材20がないアブソーバのみの場合のLP対P特性Rと同じ線上にある。
【0041】
アブソーバ変形Dが図3の原点Oと第1屈曲点aとの間にあるDAに達すると、衝突物がバンパカバー13を介して圧力チャンバ14Aに当たると、圧力チャンバ14Aが変形し始め、DAを越えると、LP対P特性も第1屈曲点aに向かって上昇していく。圧力チャンバ14Aの変形開始点DAから第1屈曲点aまでは、LP対P特性AおよびLD対D特性Aは、同じ線状を上昇していく。また、ダイラタント特性シート状部材20がないアブソーバのみの場合のLP対P特性RおよびLD対D特性Rも、第1屈曲点aまでは、特性Aと同じ線上を上昇していく。
【0042】
図2の(ii)で、衝突物がさらにアブソーバ11内に突っ込み、DがDAを越えてアブソーバ11の変形の先端が前側のダイラタント特性シート状部材20Fに、またはその直前に達すると、その衝撃を受けて前側のダイラタント特性シート状部材20Fがその全体が瞬時に硬化する。硬化時点では、LP対P特性AおよびLD対D特性特性Aは、図3で第1屈曲点a上にある。ダイラタント特性シート状部材20がないアブソーバのみの場合のLP対P特性RおよびLD対D特性Rも、図3で第1屈曲点a上にある。
【0043】
図2の(iii )は、さらに衝突物がアブソーバ11内に突っ込んで前側のダイラタント特性シート状部材20Fを後方に押している状態を示す。前側のダイラタント特性シート状部材20Fは全長にわたって硬化して直線状の剛体板となっており、全面で後方のアブソーバ11部分を押すので、局部的に押す場合よりも同じ大きさの変形量をするに要する荷重が大きくなり、図3で、LP対P特性AとLD対D特性Aにおける第1屈曲点a以上の領域での勾配が、ダイラタント特性シート状部材20がないアブソーバのみの場合のLP対P特性RとLD対D特性Rにおける勾配に比べて急になる。第1屈曲点aより大きい領域では、LP対P特性AとLD対D特性Aは同一特性を描き、LP対P特性AとLD対D特性Aはアブソーバのみの場合のLP対P特性RとLD対D特性Rより大きな勾配で立ち上がっていく。
【0044】
図2の(iii )で、衝突物がさらにアブソーバ11内に突っ込み、前側のダイラタント特性シート状部材20Fが後側のダイラタント特性シート状部材20Rの近くまで変位すると、前側のダイラタント特性シート状部材20Fの急速な変位の影響を受けて後側のダイラタント特性シート状部材20Rが全長にわたって瞬時に硬化する。硬化時には、図3で、LP対P特性AとLA対D特性Aは第2屈曲点b上にある。
【0045】
図2の(iv)では、さらに衝突物がアブソーバ11内に突っ込み、衝突物が前側のダイラタント特性シート状部材20Fと後側のダイラタント特性シート状部材20Rを共に後方に押す。後側のダイラタント特性シート状部材20Rは全長にわたって硬化しており、全面で後方のアブソーバ11部分を押すので、同じ大きさの変形をするに要する荷重が局部的に押す場合に比べて大きくなり、図3で、LP対P特性AとLD対D特性Aにおける勾配が、a〜b間よりさらに急になるとともに、ダイラタント特性シート状部材20がないアブソーバのみの場合における勾配Rに比べて急になる。この状態は図3で第2屈曲点bと第3屈曲点cとの間にある。
【0046】
図2の(iv)で、衝突物がさらにアブソーバ11内に突っ込み、後側のダイラタント特性シート状部材20がリインホースメント12の前面近傍まで近づくと、後側のダイラタント特性シート状部材20とリインホースメント12の前面との間のアブソーバ材がつぶれてそれ以上には変形できず、リインホースメント12に底付きの状態になり、急激に荷重が増大する。すなわち、図3のLP対P特性AとLD対変形D特性Aにおいて、第3屈曲点cを越えると変形がほとんど無く荷重が急激に上がる急勾配の特性を描く。
【0047】
〔ダイナミックレンジの拡大および早期センシングの、図3による説明〕
図3において、圧力センサ14BのダイナミックレンジLpは、荷重対圧力特性(LP対P特性)Aの第3屈曲点cの荷重値として定義される。また、ダイラタント特性シート状部材20がないアブソーバのみの場合の荷重対圧力特性(LP対P特性)Rにおける圧力センサのダイナミックレンジLcは、突っ込む衝突車両とリインホースメント12の前面との間にあるアブソーバ材がつぶれてそれ以上には変形できない点gの荷重値として定義される。図3に示すように、アブソーバのみの場合のLP対P特性Rにおける圧力センサ14BのダイナミックレンジLcは、本発明では、ダイラタント特性シート状部材20がアブソーバ11内に埋設されることにより、LP対P特性Aにおける圧力センサ14BのダイナミックレンジLpに拡大される。これは、第1屈曲点a以上の領域において、LP対P特性Aの勾配がアブソーバのみの場合のLP対P特性Rの勾配より大になるからである。
【0048】
本発明において、歩行者衝突検知荷重である第1の閾値L1は、アブソーバのみの場合のLP対P特性Rにおける圧力センサのダイナミックレンジLcより小で、かつLP対P特性Aの第1屈曲点aの荷重値より大きい領域に設定される。これにより、同じ大きさの第1の閾値L1に対し、ダイラタント特性シート状部材20がアブソーバ11内に埋設された場合のチャンバ圧力P1(L1を通る横軸Pに平行な線と特性Aとの交点dの横座標値)は、ダイラタント特性シート状部材20がないアブソーバのみの場合のチャンバ圧力P3(L1を通る横軸Pに平行な線と特性Rとの交点fの横座標値)に比べて小さい。したがって、ダイラタント特性シート状部材20がアブソーバ11内に埋設された場合は、アブソーバのみの場合に比べて、圧力が小さいタイミングで第1の閾値L1に到達し、衝突後早いタイミングで歩行者衝突が検知される。
【0049】
同様に、車両衝突検知荷重である第2の閾値L2は、アブソーバのみの場合のLP対P特性Rにおける圧力センサ14BのダイナミックレンジLcより大で、図3の拡大されたダイナミックレンジLpより小の領域に設定される。第2の閾値L2は、望ましくは、LP対P特性Aの第2の屈曲点bの荷重値と第3の屈曲点cの荷重値との間に設定される。また、図3でLP対P特性Aと第2の閾値L2を通る横軸Pに平行な線との交点eのチャンバ圧力P2が、上記チャンバ圧力P3より小となるように、第2の閾値L2が設定されることが望ましい。これにより、車両衝突か否かを、衝突後のチャンバ圧力Pがアブソーバのみの場合のチャンバ圧力P3に比べて小さい。したがってアブソーバのみの場合の歩行者衝突検知タイミングより早いタイミングで検知でき、車両衝突の場合はP3より早いタイミングP2で歩行者保護デバイスの不要な作動を止めることができる。
【0050】
〔コンピュータのアルゴリズム〕
コンピュータ15は、歩行者衝突時には歩行者保護デバイスを作動させ、車両衝突時には歩行者保護デバイスの作動を止める制御ルーチンを、ROMまたはRAMに記憶している。その制御は、たとえば図4に示すルーチンにより行うことができる。ただし、同様の機能を果たすことができるならば、図4に示すルーチンに限る必要はない。
【0051】
図4において、圧力センサ14Bから送信された電気信号である荷重LPが予め設定した歩行者衝突検知荷重である第1の閾値L1との大小を判定し、歩行者衝突が起きたと判定すると、歩行者保護デバイスを微小時間T0遅れてONとする信号を、歩行者保護デバイスに発する。ついで、コンピュータ15は、荷重LPが予め設定した車両衝突検知荷重である第2の閾値L2との大小を判定し、車両衝突が起きたと判定すると歩行者保護デバイスOFFの信号を歩行者保護デバイスに発し、歩行者保護デバイスが作動するのをT0前に止める。上記で、LPが第1の閾値L1より大になった時、歩行者保護デバイスを微小時間T0遅れてONとするのは、歩行者保護デバイスが歩行者保護エアバッグの場合、LPが第2の閾値L2より大となる前に歩行者保護デバイスが作動すると、LPが第2の閾値L2より大となった時に歩行者保護デバイスにOFF指令を発しても歩行者保護エアバッグをOFFにできないからである。
【0052】
図4のルーチンによる制御をより詳しく説明すると、つぎのとおりである。図4のルーチンに所定微小時間間隔ΔT毎に割り込む。ステップ101で圧力センサ検知荷重LPを読み込む。ステップ102で荷重LPが第1の閾値L1以上か否かを判定し、否ならエンドに進み、L1以上であればステップ103に進んで歩行者保護デバイスを所定時間T0経過後にONする指令を出す。T0はΔTより大である。ついでステップ104に進み、荷重LPが第2の閾値L2以上か否かを判定し、否ならエンドに進み、L2以上であればステップ105に進んで歩行者保護デバイスをOFFする指令を出す。
【0053】
ステップ103はステップ103−1〜103−4によって置き換えられてもよい。ステップ103−1はLが第1の閾値L1以上となった時からの経過時間Tを演算する。1回のルーチンへの割り込み毎にΔTだけ時間Tが増加していく。ステップ103−2で経過時間Tが上記微小時間T0以上になったか否かを判定し、否ならステップ104へと進む。Tが上記微小時間T0以上になるとステップ103−3に進み即座に歩行者保護デバイスをONする指令信号を歩行者保護デバイスに発し、ついでステップ103−4で経過時間Tを0にリセットしてステップ104へと進む。
【0054】
〔実施例の作用、効果〕
つぎに、本発明の実施例の作用、効果を説明する。
アブソーバ11内には車両幅方向に延びるダイラタント特性シート状部材20が配置されているので、歩行者衝突か車両衝突かにかかわらず、高速衝突時にダイラタント特性シート状部材20が瞬時に硬化し、チャンバ圧力が第1屈曲点aを越える圧力では、LP対P特性Aがアブソーバのみの場合の特性Rに比べて大きな勾配をもって立ち上がる。その結果、LP対P特性Aにおける圧力センサ14BのダイナミックレンジがLpに拡大される。
【0055】
また、ダイナミックレンジが拡大されるとともに、LP対P特性Aの勾配が大きくなっている。その結果、同じ閾値L1に対してアブソーバのみの場合のチャンバ圧力P3より小さいチャンバ圧力P1のタイミングで、したがって衝突時の早いタイミングで、歩行者衝突をセンシングできる。同様に、チャンバ圧力PがP3より小さいP2のタイミングで閾値L2に到達でき、したがって従来の歩行者センシングタイミングP3より早いタイミングP2で、車両衝突か否かの判定が可能となる。
【0056】
圧力センサ14Bが車両衝突か否かを判定する第2の荷重閾値L2を有し、第2の荷重閾値L2がダイラタント特性シート状部材20の設置により拡大されたダイナミックレンジ部分Lpに設定されているので、歩行者衝突か車両衝突かの判定が可能となり、車両衝突をセンシングした場合に歩行者保護デバイスの作動を止めることにより、不要な歩行者保護デバイスの作動がなくなる。
【0057】
これを図3でさらに詳細に説明すると、従来(特性R)はダイナミックレンジLcが小さいので、歩行者衝突か車両衝突かの荷重閾値(本発明のL2に対応する閾値)をダイナミックレンジLc内に設けること(図3の点fと点gとの間に点eを設けること)が困難であった。従来、たとえ点fと点gとの間に点eを設けても、アブソーバ変形が点fと点eにほとんど同時に到達して歩行者衝突か車両衝突かを識別することが困難である。これに対し、本発明では拡大されたダイナミックレンジLpに第2の閾値L2を第1の閾値L1から離して容易に設定でき、従来できなかった歩行者衝突か車両衝突かの判定をすることが可能になる。
【0058】
ダイラタント特性シート状部材20が車両前後方向に複数段、たとえば2段設けられた場合は、荷重LP対圧力P特性Aが多段に変化し圧力Pが大きい領域ほど勾配が大きくなる特性となる。そのため、ダイラタント特性シート状部材20が1段だけ設けられた場合に比べて、ダイナミックレンジLpをより拡大できる。ただし、本発明はダイラタント特性シート状部材20が1段だけ設けられた場合を含む。
【0059】
また、図1および図5に示すように、ダイラタント特性シート状部材20がアブソーバ11内で圧力チャンバ14A側に寄せて配置されているので、歩行者衝突を車両衝突と誤判定することが防止される。
すなわち、歩行者衝突時には歩行者が自動車のフード側に倒れていくので、ダイラタント特性シート状部材20を圧力チャンバ14Aに寄せて配置しておかないとアブソーバ11の上部のつぶれ量が大きくなり、圧力チャンバ14Aのつぶれが大きくなると、車両衝突と誤判定する可能性がある。本発明ではその誤判定を防止できる。
【0060】
<本発明の変形例>
上記本発明の実施例は以下の変形例をとることができる。上記の説明は、本発明の変形例にも適用できる。
変形例では、図6に示すように、ダイラタント特性シート状部材20がアブソーバ11内に前後方向に互いに間隔をもたせて3段以上に配置されている。これによって、荷重対圧力特性が図7のBのようになり、屈曲点が2段の場合に比べて多くなり、かつ、荷重対圧力特性Bが、2段の場合の荷重対圧力特性Aに比べて荷重大側に移動する。
【0061】
その効果として、実施例の衝突検知装置14のダイナミックレンジLpに比べて、変形例の衝突検知装置14のダイナミックレンジはさらに拡大される。
その結果、特性Aに比べて、早めに第1の閾値L1および第2の閾値L2に到達することができ、検知が早くなり、車両衝突か否かの判定も早くなる。
【符号の説明】
【0062】
10 衝突検知装置を備えた自動車用バンパ装置
11 アブソーバ
12 バンパリインホースメント
13 バンパカバー
14 衝突検知装置
14A 圧力チャンバ
14B 圧力センサ
20 ダイラタント特性シート状部材
【技術分野】
【0001】
本発明は、衝突検知装置を備えた自動車用バンパ装置(以下、単に、「自動車用バンパ装置」ともいう)に関し、とくに歩行者衝突と車両衝突との識別が可能な自動車用バンパ装置に関する。
【背景技術】
【0002】
特許文献1は、バンパリインホースメントとバンパカバーとの間に配置されたバンパアブソーバと、バンパアブソーバの上方に隣接して配置された圧力チャンバおよび圧力チャンバの圧力変化を検出する圧力センサを有する衝突検知装置と、を有する自動車用フロントバンパ装置を開示している。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2009−018734号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1に開示の自動車用バンパ装置にはつぎの課題がある。
すなわち、歩行者衝突検知用の圧力センサにおいて衝突荷重検知用閾値が歩行者検知用のみに設定されており、圧力センサの識別可能荷重範囲(以下、「ダイナミックレンジ」という)が狭いので圧力センサのダイナミックレンジに歩行者検知用閾値に加えて車両衝突検知用閾値を設定するのが困難である。圧力センサが衝突を検知すると、車両衝突であろうが歩行者衝突であろうが歩行者保護デバイスを作動させている。そのため、実際は車両衝突であって歩行者保護デバイスを作動させる必要がない場合でも歩行者保護デバイス、たとえば歩行者保護用エアバッグやポップアップフードを不要に作動させている。
【0005】
本発明の目的は、圧力センサのダイナミックレンジを拡大した自動車用バンパ装置を提供することにある。
【課題を解決するための手段】
【0006】
上記目的を達成する本発明はつぎのとおりである。
(1) 本発明の衝突検知装置を備えた自動車用バンパ装置は、バンパリインホースメントとバンパカバーとの間に配置されたバンパアブソーバと、バンパアブソーバの上側に配置された圧力チャンバおよび該圧力チャンバに接続された圧力センサとを有する衝突検知装置と、を備えている。バンパアブソーバ内には車両幅方向に延びるダイラタント特性を有するシート状部材が配置されている。
【0007】
(2) 上記(1)の自動車用バンパ装置において、圧力センサが歩行者衝突を判定する第1の荷重閾値と第1の荷重閾値より大きい車両衝突を判定する第2の荷重閾値を有し、第2の荷重閾値が、圧力センサのダイナミックレンジのうちバンパアブソーバ内にダイラタント特性シート状部材を配置したことにより拡大された部分に設定されている。
【0008】
(3) 上記(1)または(2)の自動車用バンパ装置において、ダイラタント特性シート状部材はバンパアブソーバ内で圧力チャンバ側に寄せて配置されている。
【0009】
(4) 上記(1)〜(3)の何れか1つの自動車用バンパ装置において、ダイラタント特性シート状部材は車両前後方向に互いに間隔をもたせて複数段配置されており、前側のダイラタント特性シート状部材の上下方向幅はそれより後側のダイラタント特性シート状部材の上下方向幅以下であり、正面視で前側のダイラタント特性シート状部材はそれより後側のダイラタント特性シート状部材にオーバラップしている。
【発明の効果】
【0010】
上記(1)の自動車用バンパ装置によればつぎの効果が得られる。
衝突検知装置が圧力チャンバと圧力センサを含み、バンパアブソーバ内には車両幅方向に延びるダイラタント特性シート状部材が配置されているので、歩行者または相手車両との高速衝突時にはアブソーバ変形の影響がダイラタント特性シート状部材に及んだ時にそのダイラタント特性シート状部材が瞬時に硬化する。その結果、図3の荷重対チャンバ圧力および荷重対アブソーバ変形で、アブソーバ変形Dが第1屈曲点a以上の変形領域、すなわちチャンバ圧力が第1屈曲点a以上の圧力領域では、荷重対チャンバ圧力特性Aがダイラタント特性シート状部材が無いアブソーバのみの場合の荷重対チャンバ圧力特性Rに比べて大きな勾配をもって立ち上がる。これによって、圧力センサのダイナミックレンジが特性Rの場合のLcから特性Aの場合のLpに拡大される。
また、大きな勾配の荷重対チャンバ圧力特性Aにより、アブソーバのみの場合の荷重対チャンバ圧力特性Rよりもチャンバ圧力が小さいタイミングで同じ荷重閾値(L1またはL2)に達することができ、したがって衝突時の早いタイミング(P1またはP2)で、歩行者衝突のセンシング、および歩行者衝突か車両衝突かの判定が可能となる。
【0011】
上記(2)の自動車用バンパ装置によれば、圧力センサが車両衝突を判定する第2の荷重閾値(L2)を有し、第2の荷重閾値がダイラタント特性シート状部材の設置により拡大されたダイナミックレンジ部分(LpがLcより大の部分)に設定されているので、第2の荷重閾値L2が第1の荷重閾値L1から離れ、車両衝突のセンシングと歩行者衝突のセンシングとを別々に行うことができる。その結果、歩行者衝突だけでなく、歩行者衝突と車両衝突との識別も行うことができる。
また、拡大されたダイナミックレンジ部分において特性Aが特性Rより大きな勾配で立ち上がるため、車両衝突のセンシングを行うチャンバ圧力P2を、アブソーバのみの場合の歩行者衝突のセンシングを行うチャンバ圧力P3より早いタイミングに設定でき、衝突後早期の段階で衝突が車両衝突か否かの判定が可能となる。その結果、歩行者衝突センシング後車両衝突をセンシングした場合に歩行者保護デバイスが作動する前に歩行者保護デバイスを作動させる指令をOFFすることにより、歩行者保護デバイスが不要に作動することがなくなる。
【0012】
上記(3)の自動車用バンパ装置によれば、ダイラタント特性シート状部材がバンパアブソーバ内で圧力チャンバ側に寄せて配置されているので、歩行者衝突を車両衝突と誤判定することが防止される。詳しくは、歩行者衝突時には歩行者が自動車のフード側に倒れていくので、ダイラタント特性シート状部材を圧力チャンバに寄せて配置しておかないとアブソーバの上部のつぶれ量が大きくなり、圧力チャンバのつぶれが大きくなると、車両衝突と誤判定する可能性がある。しかし、ダイラタント特性シート状部材がバンパアブソーバ内で圧力チャンバ側に寄せて配置されているので、この誤判定がなくなる。
【0013】
上記(4)の自動車用バンパ装置によれば、ダイラタント特性シート状部材が車両前後方向に互いに間隔をもたせて複数段配置されているので、荷重対チャンバ圧力特性が多段に変化しチャンバ圧力が大きい領域ほど勾配が大きくなる特性となり、ダイラタント特性シート状部材が1段だけ設けられる場合に比べて、ダイナミックレンジLpをより拡大できる。
【図面の簡単な説明】
【0014】
【図1】本発明の実施例に係る自動車用バンパ装置の側面視方向断面図である。
【図2】本発明の実施例に係る自動車用バンパ装置の、衝突時の各段階(i)〜(iv)におけるバンパアブソーバの変形とダイラタント特性シート状部材のアブソーバ内位置を示す、(イ) はバンパアブソーバの平面視断面図、および(ロ)は(イ)のX−X断面図である。
【図3】本発明の実施例に係る自動車用バンパ装置の圧力センサ検出荷重LP対チャンバ圧力P特性図A、およびバンパアブソーバ変形荷重LD対バンパアブソーバ変形D特性図Aである。
【図4】本発明の実施例に係る自動車用バンパ装置の制御ルーチン図である。
【図5】本発明の実施例に係る自動車用バンパ装置の、(イ)は平面視断面図、および(ロ)は(イ)のX−X断面図である。
【図6】本発明の実施例の変形例に係る自動車用バンパ装置の、(イ)は平面図、および(ロ)は(イ)のX−X断面図である。
【図7】本発明の実施例とその変形例に係る自動車用バンパ装置の圧力センサ検出荷重(LP)対チャンバ圧力(P)特性図A、Bである。
【発明を実施するための形態】
【0015】
本発明の実施例とその変形例に係る衝突検知措置を備えた自動車用バンパ装置を、図1〜図7を参照して説明する。
図1〜図5は本発明の実施例を示し、図6は本発明の実施例の変形例を示し、図7は実施例と変形例の特性を示す。
本発明の実施例とその変形例にわたって共通する構造部分には、本発明の実施例とその変形例にわたって互いに同じ符号を付してある。
図中、FRは車両前後方向後方を示し、UPは上方を示す。
【0016】
<本発明の実施例>
〔全体構成〕
本発明の実施例に係る衝突検知装置を備えた自動車用バンパ装置10は、図1〜図5に示すように、バンパリインホースメント12とバンパカバー13との間に配置されたバンパアブソーバ(以下、単にアブソーバともいう)11と、衝突検知装置14と、衝突検知装置14に電気的に接続された車両搭載コンピュータ(ECU)15と、を備えている。衝突検知装置14は、アブソーバ11の上側に配置された圧力チャンバ14Aと、圧力チャンバ14Aに接続された圧力センサ14B、とを有する。圧力チャンバ14Aはバンパリインホースメント12とバンパカバー13との間に配置される。
アブソーバ11内にはダイラタント特性を有するシート状部材(以下、ダイラタント特性シート状部材、またはシート状部材という)20が配置されている。
【0017】
アブソーバ11は発泡ウレタンからなり、衝突時に衝突荷重とアブソーバ11の変形の積から求まる衝突エネルギの一部を吸収する。
バンパリインホースメント12は、アルミ合金の押し出し材からなり、車両幅方向に直線状に延び両端部が車両後方に斜めに曲げられた形状を有し、車両幅方向両端部で車両のサイドメンバに溶接等により固定されている。
バンパカバー13は樹脂製であり、衝突時に衝突物に押されてアブソーバ11側および圧力チャンバ14A側に変形する。衝突物は歩行者衝突の場合は歩行者、車両衝突の場合は相手車両である。
【0018】
圧力チャンバ14Aは樹脂製の可撓性袋体からなる。衝突時、圧力チャンバ14Aはバンパカバー13に押されて変形し変形に比例してチャンバ圧力が上昇する。圧力チャンバ14Aは衝突エネルギの一部を吸収することを目的とする部材ではない。
圧力センサ14Bは、圧力チャンバ14A内圧力を検知する圧力方式センサからなる。圧力センサ14Bは、圧力チャンバ14A内圧を検知し、該圧力チャンバ14A内圧から衝突荷重LPを検知し、検知荷重LPに対応する電気信号をコンピュータ15に送信する。
【0019】
図2に示すように、ダイラタント特性シート状部材20はアブソーバ11内に車両前後方向に1段以上配置されている。
ダイラタント特性シート状部材20の長手方向はアブソーバ11内で車両幅方向に向けられており、ダイラタント特性シート状部材20の幅方向は上下方向に向けられており、ダイラタント特性シート状部材20の厚み方向は車両前後方向に向けられている。
【0020】
図1および図5に示すように、ダイラタント特性シート状部材20はアブソーバ11内で圧力チャンバ14A側に寄せて配置されている。望ましくは、ダイラタント特性シート状部材20の上端部はアブソーバ11の上端部に位置する。
【0021】
図5に示すように、ダイラタント特性シート状部材20がアブソーバ11内に前後方向に互いに間隔をもたせて複数段に、配置されている場合、前側のダイラタント特性シート状部材20Fはそれより後側のダイラタント特性シート状部材20Rよりもシート状部材20の幅方向中心位置を上側にずらして配置されている。
【0022】
望ましくは、前側のダイラタント特性シート状部材20Fの上下方向幅はそれより後側のダイラタント特性シート状部材20Rの上下方向幅以下であり、正面視で前側のダイラタント特性シート状部材20Fはそれより後側のダイラタント特性シート状部材20Rにオーバラップしている。
【0023】
〔ダイラタント特性シート状部材〕
ダイラタント特性シート状部材20は、直接アブソーバ11内に埋設されてもよいし、あるいは樹脂製または布製または樹脂コーティングされた布製等からなる袋状で可撓性を有する包囲体で包んでまたは包囲体の中に充填した状態でアブソーバ11内に埋設されてもよい。包囲体自体はダイラタント特性を有しない。
【0024】
ダイラタント特性とは、衝撃時以外では可撓性を有し、たとえばゲル状で、衝撃がかかった時には瞬時に粘性を増して固体状となり、休止状態で再び元の可撓性、たとえばゲル状を取り戻す特性をいう。ダイラタント特性シート状部材20は、力が低速で加わるか力が加わらない休止状態の下では可撓性を有し、たとえばゲル状であり、高速で力が加わるすなわち衝撃力が加わると瞬時に剛性が増して固体エラストマとして振る舞い、衝撃エネルギを吸収し消散させる。
【0025】
ダイラタント特性シート状部材20の一部分に衝撃力が加わった場合でも、その衝撃力が加わった部分のみならず、その衝撃力が伝達された部分および急激に変形する部分も瞬時に剛性が増して固体エラストマとして振る舞う。ダイラタント特性シート状部材20が長手方向の一部に衝撃力を受けても、その衝撃がその段のダイラタント特性シート状部材20のほぼ全域に伝わるので、その段のダイラタント特性シート状部状部材20のほぼ全域が瞬時に硬化し固体エラストマとなる。
【0026】
ダイラタント特性シート状部材20には、たとえば英国のd3oTMlab社が製造し、市販されている、公知のd3oTM材を使用することができる。「d3o」は登録商標でディースリーオーと呼ぶ。d3oTMは樹脂を主成分とする。図示例ではダイラタント特性シート状部材20がd3oTM材のシートからなる場合を示している。d3oTM材は、受ける衝撃の強さで分子の結束が変化する。強い衝撃を受けると瞬時に分子同士が結束して固体状となり、衝撃が吸収、消散され、エネルギの多くが熱に変換される。衝撃力がかからなくなると分子の結束が解かれ元の柔軟な状態に戻る。d3oTM材からなるダイラタント特性シート状部材20はオレンジ色の粘度状物で垂直姿勢をとってもシート形状を維持できるので、ダイラタント特性シート状部材20を可撓性包囲体で包囲することなく直接、アブソーバ11内に埋設することができる。ただし、d3oTM材シートを袋状の可撓性包囲体で包囲してアブソーバ11内に埋設してもよい。
【0027】
ダイラタント特性シート状部材20の厚さは、d3oTM材シートの場合、約3mm〜7mmあれば前突時の衝突物の衝撃を受けてシート状部材20全域が硬化し、硬化した直線状のシート状部材20でそれより後方のアブソーバ11を全面積で後方に押すことができる。シート状部材20が7mm厚であってもアブソーバ11の容積はほとんど減少せず、アブソーバ11の衝撃吸収能力をほとんど減少させない。
また、ダイラタント特性シート状部材20を構成するd3oTM材シートは1枚のシートから構成されてもよいし、数枚のシートを重ねたものから構成されてもよい。数枚のシートを重ねて構成する場合、総計の厚さが約3mm〜7mmあればよい。d3oTM材シートのアブソーバ大きさへの切断は、d3oTM材シートが硬化していない状態で行う。
【0028】
ダイラタント特性シート状部材20は、d3oTM材シートに代えて、樹脂シート、樹脂フィルム、樹脂コーティング布などからなる袋状の包囲体とその中に充填されたダイラタント特性を有する材料から構成されてもよい。その場合、ダイラタント特性を有する材料を中に充填した包囲体は全体として見ればほぼ一定厚さをもつシート状部材である。ダイラタント特性を有する材料を挟んで対向する包囲体の2面は複数箇所で熱融着などにより互いに結合されており、それによってダイラタント特性シート状部材20は一定厚を保持する。
【0029】
ダイラタント特性を有する材料は、荷重がかかっていない状態でゲル状であり、ダイラタント特性を示すポリマ組成物、および潤滑剤と充填剤を含む。
ダイラタント特性を示すポリマ組成物は、ポリボロシロキサン、キサンタンガム、ガーゴムおよびポリビニルアルコール四ホウ酸ナトリウムよりなる群から選択された1種以上のポリマである。このポリマ組成物、たとえばポリボロシロキサンは、低速で力が印加されると容易に変形し、高速で力が加わると瞬時に粘性が増加して固体ポリマとなり衝撃エネルギを吸収する。固体ポリマを休止状態にすると元のゲル状態にゆるやかに復帰する。
潤滑剤は、たとえば炭化水素系グリースまたは流体であり、充填剤は、微小粒または粉末のプラスチック、セラミック、金属または繊維材料である。
【0030】
ダイラタント特性を示すポリマ組成物、潤滑剤、充填剤の混合割合は、重量百分率で、上記ポリマを90%乃至20%未満、上記潤滑剤を20%未満(たとえば、10%)乃至60%以上(たとえば、80%)、上記充填剤を0%乃至90%を含む。それらの混合割合を調整することによりダイラタント特性の粘性、可撓性を調整できる。高速衝突時に硬化し低速衝突時に良好な可撓性を示す混合割合の一例を挙げると、70%のポリボロシロキサン、20%の潤滑剤および10%の充填剤である。ただし、この配合割合に限るものではない。
以上では、ダイラタント特性を示す材料として、d3oTMと、包囲体の中に充填されたダイラタント特性を示すポリマ組成物からなるシートを示したが、これらと同様の構成、作用をもつものであれば、使用可能である。
【0031】
〔図3における荷重対チャンバ圧力特性、および荷重対アブソーバ変形特性〕
歩行者および/または車両との衝突時における、圧力センサ14Aが検知するアブソーバ11に掛かる荷重LPと圧力チャンバ14Bのチャンバ圧力Pとの関係を表すLP対P特性A、および、アブソーバ11に掛かる荷重LDとアブソーバ11の変形Dとの関係を表すLD対D特性A’(A’とAとは大部分で一致するので、A’を以下Aという)を、図3に示す。LP対P特性AとLD対D特性Aとは、圧力チャンバ14Aの圧力Pおよびアブソーバ11の変形Dを介して互いに関連するので、原点を互いにずらすことにより1つの図で表せる。LP対P特性Aの原点は、LD対D特性Aの原点に対して、変形D方向に、圧力チャンバ14Aの前端面とアブソーバ11の前端面との間の距離DA(図1)だけずれており、圧力P方向に、LD対D特性におけるDAでの荷重値LAだけずれている。
【0032】
圧力チャンバ14Aの前端面はアブソーバ11の前端面より後方にあることが望ましい。これはアブソーバ11変形が生じない程度の軽い衝突で圧力チャンバ14Aが作動するのを防止するためである。
ただし、圧力チャンバ14Aの前端面はアブソーバ11の前端面と車両前後方向に同じ位置か、またはアブソーバ11の前端面より前方にあってもよい。
【0033】
図3は、圧力チャンバ14Aの前端面がアブソーバ11の前端面より後方にある場合で示している。
図3において、衝突時のバンパカバー13の変形がアブソーバ11に達しアブソーバ11が変形を起こし始める点がD=0、LD=0である。アブソーバ11の変形Dの増大とともに荷重LDも増大していく。アブソーバ11の変形DがDA(圧力チャンバ14Aの前端面とアブソーバ11の前端面との距離)になると、圧力センサ14Bが変形し始め、圧力センサ14Bの変形とともにチャンバ圧力Pが増大しセンサ検出荷重LPが増大していく。
【0034】
圧力チャンバ14Aの前端面がアブソーバ11の前端面より前方にある場合は、図3で圧力チャンバ14Aの変形開始点DAがLD対Dグラフの横軸上で原点Oより左側に来て、LP対P特性AはDAから変形を始め、LD対D特性の原点を通った後、第1屈曲点aに向かって立ち上がっていくことになる。
また、圧力チャンバ14Aの前端面がアブソーバ11の前端面と車両前後方向に同じ位置にある場合は、図3で圧力チャンバ14Aの変形開始点DAがLD対Dグラフの原点Oに来て、LP対P特性AはLD対D特性の原点から第1屈曲点aに向かって立ち上がっていくことになる。
【0035】
図3では、ダイラタント特性シート状部材20がある場合のLD対D特性をAで示し、ダイラタント特性シート状部材20がない場合のLD対D特性をRで示してある。また、ダイラタント特性シート状部材20がある場合のLP対P特性をAで示し、ダイラタント特性シート状部材20がない場合のLP対P特性をRで示してある。LD対D特性AとLP対P特性AとはLD対D特性AのDA、LA以上の領域で互いに一致し、LD対D特性RとLP対P特性RとはLD対D特性RのDA、LA以上の領域で互いに一致する。
【0036】
LD対D特性AおよびLP対P特性Aにおいて、第1屈曲点aは最前のダイラタント特性シート状部材20が瞬時に硬化する点である。LD対D特性AおよびLP対P特性Aにおいて、それぞれのグラフの原点から第1屈曲点aまでは、特性Aと特性Rは同一の線を描き、第1屈曲点aを越えると、特性Aは特性Rより大きな勾配で立ち上がっていく。
【0037】
図3に示すように、センサ検出荷重LP対チャンバ圧力P特性Aは、アブソーバ11内にダイラタント特性シート状部材20が配置されていることにより、ダイラタント特性シート状部材20が配置されていないアブソーバのみの場合のLP対P特性RのダイナミックレンジLcに比べて拡大されたダイナミックレンジLpを有する。これにより、後述するように、歩行者衝突および車両衝突の早期センシングが可能になり、歩行者衝突か車両衝突かの識別が可能になる。
【0038】
〔図2における衝突時のアブソーバ変形、および図2の変形と図3の特性との関係〕
ダイラタント特性シート状部材20が車両前後方向に多段に配置されたアブソーバ11における、歩行者および/または車両との衝突時における、アブソーバ11の変形とアブソーバ11内におけるダイラタント特性シート状部材20の変位は、図2に示すようになる。図2の変形と図3の特性との関係は以下のとおりである。
【0039】
図2および図3において、衝突物がバンパカバー13を介してアブソーバ11に当たった時がD=0、LD=0で、アブソーバ11の変形DがDAになって衝突物がバンパカバー13を介して圧力チャンバ14Aに当たった時がP=0、LP=0である。
さらに詳しくは、図2の(i)は衝突直前で、アブソーバ11が変形していない。この状態は、図3ではLD対D特性Aの原点O上にある。
【0040】
図2の(ii)は、衝突後でアブソーバ変形Dが初期の段階で、アブソーバ11が衝突物の外形に倣って局部的に変形し、変形の先端が前側のダイラタント特性シート状部材20Fの直前位置に達する迄を示す。この時はダイラタント特性シート状部材20はまだ硬化前の段階にある。この状態は、図3では、LD対D特性Aにおいて原点Oと第1屈曲点aとの間にある。第1屈曲点aまでは、LD対D特性Aはダイラタント特性シート状部材20がないアブソーバのみの場合のLD対D特性Rと同じ線上にあり、LP対P特性Aもダイラタント特性シート状部材20がないアブソーバのみの場合のLP対P特性Rと同じ線上にある。
【0041】
アブソーバ変形Dが図3の原点Oと第1屈曲点aとの間にあるDAに達すると、衝突物がバンパカバー13を介して圧力チャンバ14Aに当たると、圧力チャンバ14Aが変形し始め、DAを越えると、LP対P特性も第1屈曲点aに向かって上昇していく。圧力チャンバ14Aの変形開始点DAから第1屈曲点aまでは、LP対P特性AおよびLD対D特性Aは、同じ線状を上昇していく。また、ダイラタント特性シート状部材20がないアブソーバのみの場合のLP対P特性RおよびLD対D特性Rも、第1屈曲点aまでは、特性Aと同じ線上を上昇していく。
【0042】
図2の(ii)で、衝突物がさらにアブソーバ11内に突っ込み、DがDAを越えてアブソーバ11の変形の先端が前側のダイラタント特性シート状部材20Fに、またはその直前に達すると、その衝撃を受けて前側のダイラタント特性シート状部材20Fがその全体が瞬時に硬化する。硬化時点では、LP対P特性AおよびLD対D特性特性Aは、図3で第1屈曲点a上にある。ダイラタント特性シート状部材20がないアブソーバのみの場合のLP対P特性RおよびLD対D特性Rも、図3で第1屈曲点a上にある。
【0043】
図2の(iii )は、さらに衝突物がアブソーバ11内に突っ込んで前側のダイラタント特性シート状部材20Fを後方に押している状態を示す。前側のダイラタント特性シート状部材20Fは全長にわたって硬化して直線状の剛体板となっており、全面で後方のアブソーバ11部分を押すので、局部的に押す場合よりも同じ大きさの変形量をするに要する荷重が大きくなり、図3で、LP対P特性AとLD対D特性Aにおける第1屈曲点a以上の領域での勾配が、ダイラタント特性シート状部材20がないアブソーバのみの場合のLP対P特性RとLD対D特性Rにおける勾配に比べて急になる。第1屈曲点aより大きい領域では、LP対P特性AとLD対D特性Aは同一特性を描き、LP対P特性AとLD対D特性Aはアブソーバのみの場合のLP対P特性RとLD対D特性Rより大きな勾配で立ち上がっていく。
【0044】
図2の(iii )で、衝突物がさらにアブソーバ11内に突っ込み、前側のダイラタント特性シート状部材20Fが後側のダイラタント特性シート状部材20Rの近くまで変位すると、前側のダイラタント特性シート状部材20Fの急速な変位の影響を受けて後側のダイラタント特性シート状部材20Rが全長にわたって瞬時に硬化する。硬化時には、図3で、LP対P特性AとLA対D特性Aは第2屈曲点b上にある。
【0045】
図2の(iv)では、さらに衝突物がアブソーバ11内に突っ込み、衝突物が前側のダイラタント特性シート状部材20Fと後側のダイラタント特性シート状部材20Rを共に後方に押す。後側のダイラタント特性シート状部材20Rは全長にわたって硬化しており、全面で後方のアブソーバ11部分を押すので、同じ大きさの変形をするに要する荷重が局部的に押す場合に比べて大きくなり、図3で、LP対P特性AとLD対D特性Aにおける勾配が、a〜b間よりさらに急になるとともに、ダイラタント特性シート状部材20がないアブソーバのみの場合における勾配Rに比べて急になる。この状態は図3で第2屈曲点bと第3屈曲点cとの間にある。
【0046】
図2の(iv)で、衝突物がさらにアブソーバ11内に突っ込み、後側のダイラタント特性シート状部材20がリインホースメント12の前面近傍まで近づくと、後側のダイラタント特性シート状部材20とリインホースメント12の前面との間のアブソーバ材がつぶれてそれ以上には変形できず、リインホースメント12に底付きの状態になり、急激に荷重が増大する。すなわち、図3のLP対P特性AとLD対変形D特性Aにおいて、第3屈曲点cを越えると変形がほとんど無く荷重が急激に上がる急勾配の特性を描く。
【0047】
〔ダイナミックレンジの拡大および早期センシングの、図3による説明〕
図3において、圧力センサ14BのダイナミックレンジLpは、荷重対圧力特性(LP対P特性)Aの第3屈曲点cの荷重値として定義される。また、ダイラタント特性シート状部材20がないアブソーバのみの場合の荷重対圧力特性(LP対P特性)Rにおける圧力センサのダイナミックレンジLcは、突っ込む衝突車両とリインホースメント12の前面との間にあるアブソーバ材がつぶれてそれ以上には変形できない点gの荷重値として定義される。図3に示すように、アブソーバのみの場合のLP対P特性Rにおける圧力センサ14BのダイナミックレンジLcは、本発明では、ダイラタント特性シート状部材20がアブソーバ11内に埋設されることにより、LP対P特性Aにおける圧力センサ14BのダイナミックレンジLpに拡大される。これは、第1屈曲点a以上の領域において、LP対P特性Aの勾配がアブソーバのみの場合のLP対P特性Rの勾配より大になるからである。
【0048】
本発明において、歩行者衝突検知荷重である第1の閾値L1は、アブソーバのみの場合のLP対P特性Rにおける圧力センサのダイナミックレンジLcより小で、かつLP対P特性Aの第1屈曲点aの荷重値より大きい領域に設定される。これにより、同じ大きさの第1の閾値L1に対し、ダイラタント特性シート状部材20がアブソーバ11内に埋設された場合のチャンバ圧力P1(L1を通る横軸Pに平行な線と特性Aとの交点dの横座標値)は、ダイラタント特性シート状部材20がないアブソーバのみの場合のチャンバ圧力P3(L1を通る横軸Pに平行な線と特性Rとの交点fの横座標値)に比べて小さい。したがって、ダイラタント特性シート状部材20がアブソーバ11内に埋設された場合は、アブソーバのみの場合に比べて、圧力が小さいタイミングで第1の閾値L1に到達し、衝突後早いタイミングで歩行者衝突が検知される。
【0049】
同様に、車両衝突検知荷重である第2の閾値L2は、アブソーバのみの場合のLP対P特性Rにおける圧力センサ14BのダイナミックレンジLcより大で、図3の拡大されたダイナミックレンジLpより小の領域に設定される。第2の閾値L2は、望ましくは、LP対P特性Aの第2の屈曲点bの荷重値と第3の屈曲点cの荷重値との間に設定される。また、図3でLP対P特性Aと第2の閾値L2を通る横軸Pに平行な線との交点eのチャンバ圧力P2が、上記チャンバ圧力P3より小となるように、第2の閾値L2が設定されることが望ましい。これにより、車両衝突か否かを、衝突後のチャンバ圧力Pがアブソーバのみの場合のチャンバ圧力P3に比べて小さい。したがってアブソーバのみの場合の歩行者衝突検知タイミングより早いタイミングで検知でき、車両衝突の場合はP3より早いタイミングP2で歩行者保護デバイスの不要な作動を止めることができる。
【0050】
〔コンピュータのアルゴリズム〕
コンピュータ15は、歩行者衝突時には歩行者保護デバイスを作動させ、車両衝突時には歩行者保護デバイスの作動を止める制御ルーチンを、ROMまたはRAMに記憶している。その制御は、たとえば図4に示すルーチンにより行うことができる。ただし、同様の機能を果たすことができるならば、図4に示すルーチンに限る必要はない。
【0051】
図4において、圧力センサ14Bから送信された電気信号である荷重LPが予め設定した歩行者衝突検知荷重である第1の閾値L1との大小を判定し、歩行者衝突が起きたと判定すると、歩行者保護デバイスを微小時間T0遅れてONとする信号を、歩行者保護デバイスに発する。ついで、コンピュータ15は、荷重LPが予め設定した車両衝突検知荷重である第2の閾値L2との大小を判定し、車両衝突が起きたと判定すると歩行者保護デバイスOFFの信号を歩行者保護デバイスに発し、歩行者保護デバイスが作動するのをT0前に止める。上記で、LPが第1の閾値L1より大になった時、歩行者保護デバイスを微小時間T0遅れてONとするのは、歩行者保護デバイスが歩行者保護エアバッグの場合、LPが第2の閾値L2より大となる前に歩行者保護デバイスが作動すると、LPが第2の閾値L2より大となった時に歩行者保護デバイスにOFF指令を発しても歩行者保護エアバッグをOFFにできないからである。
【0052】
図4のルーチンによる制御をより詳しく説明すると、つぎのとおりである。図4のルーチンに所定微小時間間隔ΔT毎に割り込む。ステップ101で圧力センサ検知荷重LPを読み込む。ステップ102で荷重LPが第1の閾値L1以上か否かを判定し、否ならエンドに進み、L1以上であればステップ103に進んで歩行者保護デバイスを所定時間T0経過後にONする指令を出す。T0はΔTより大である。ついでステップ104に進み、荷重LPが第2の閾値L2以上か否かを判定し、否ならエンドに進み、L2以上であればステップ105に進んで歩行者保護デバイスをOFFする指令を出す。
【0053】
ステップ103はステップ103−1〜103−4によって置き換えられてもよい。ステップ103−1はLが第1の閾値L1以上となった時からの経過時間Tを演算する。1回のルーチンへの割り込み毎にΔTだけ時間Tが増加していく。ステップ103−2で経過時間Tが上記微小時間T0以上になったか否かを判定し、否ならステップ104へと進む。Tが上記微小時間T0以上になるとステップ103−3に進み即座に歩行者保護デバイスをONする指令信号を歩行者保護デバイスに発し、ついでステップ103−4で経過時間Tを0にリセットしてステップ104へと進む。
【0054】
〔実施例の作用、効果〕
つぎに、本発明の実施例の作用、効果を説明する。
アブソーバ11内には車両幅方向に延びるダイラタント特性シート状部材20が配置されているので、歩行者衝突か車両衝突かにかかわらず、高速衝突時にダイラタント特性シート状部材20が瞬時に硬化し、チャンバ圧力が第1屈曲点aを越える圧力では、LP対P特性Aがアブソーバのみの場合の特性Rに比べて大きな勾配をもって立ち上がる。その結果、LP対P特性Aにおける圧力センサ14BのダイナミックレンジがLpに拡大される。
【0055】
また、ダイナミックレンジが拡大されるとともに、LP対P特性Aの勾配が大きくなっている。その結果、同じ閾値L1に対してアブソーバのみの場合のチャンバ圧力P3より小さいチャンバ圧力P1のタイミングで、したがって衝突時の早いタイミングで、歩行者衝突をセンシングできる。同様に、チャンバ圧力PがP3より小さいP2のタイミングで閾値L2に到達でき、したがって従来の歩行者センシングタイミングP3より早いタイミングP2で、車両衝突か否かの判定が可能となる。
【0056】
圧力センサ14Bが車両衝突か否かを判定する第2の荷重閾値L2を有し、第2の荷重閾値L2がダイラタント特性シート状部材20の設置により拡大されたダイナミックレンジ部分Lpに設定されているので、歩行者衝突か車両衝突かの判定が可能となり、車両衝突をセンシングした場合に歩行者保護デバイスの作動を止めることにより、不要な歩行者保護デバイスの作動がなくなる。
【0057】
これを図3でさらに詳細に説明すると、従来(特性R)はダイナミックレンジLcが小さいので、歩行者衝突か車両衝突かの荷重閾値(本発明のL2に対応する閾値)をダイナミックレンジLc内に設けること(図3の点fと点gとの間に点eを設けること)が困難であった。従来、たとえ点fと点gとの間に点eを設けても、アブソーバ変形が点fと点eにほとんど同時に到達して歩行者衝突か車両衝突かを識別することが困難である。これに対し、本発明では拡大されたダイナミックレンジLpに第2の閾値L2を第1の閾値L1から離して容易に設定でき、従来できなかった歩行者衝突か車両衝突かの判定をすることが可能になる。
【0058】
ダイラタント特性シート状部材20が車両前後方向に複数段、たとえば2段設けられた場合は、荷重LP対圧力P特性Aが多段に変化し圧力Pが大きい領域ほど勾配が大きくなる特性となる。そのため、ダイラタント特性シート状部材20が1段だけ設けられた場合に比べて、ダイナミックレンジLpをより拡大できる。ただし、本発明はダイラタント特性シート状部材20が1段だけ設けられた場合を含む。
【0059】
また、図1および図5に示すように、ダイラタント特性シート状部材20がアブソーバ11内で圧力チャンバ14A側に寄せて配置されているので、歩行者衝突を車両衝突と誤判定することが防止される。
すなわち、歩行者衝突時には歩行者が自動車のフード側に倒れていくので、ダイラタント特性シート状部材20を圧力チャンバ14Aに寄せて配置しておかないとアブソーバ11の上部のつぶれ量が大きくなり、圧力チャンバ14Aのつぶれが大きくなると、車両衝突と誤判定する可能性がある。本発明ではその誤判定を防止できる。
【0060】
<本発明の変形例>
上記本発明の実施例は以下の変形例をとることができる。上記の説明は、本発明の変形例にも適用できる。
変形例では、図6に示すように、ダイラタント特性シート状部材20がアブソーバ11内に前後方向に互いに間隔をもたせて3段以上に配置されている。これによって、荷重対圧力特性が図7のBのようになり、屈曲点が2段の場合に比べて多くなり、かつ、荷重対圧力特性Bが、2段の場合の荷重対圧力特性Aに比べて荷重大側に移動する。
【0061】
その効果として、実施例の衝突検知装置14のダイナミックレンジLpに比べて、変形例の衝突検知装置14のダイナミックレンジはさらに拡大される。
その結果、特性Aに比べて、早めに第1の閾値L1および第2の閾値L2に到達することができ、検知が早くなり、車両衝突か否かの判定も早くなる。
【符号の説明】
【0062】
10 衝突検知装置を備えた自動車用バンパ装置
11 アブソーバ
12 バンパリインホースメント
13 バンパカバー
14 衝突検知装置
14A 圧力チャンバ
14B 圧力センサ
20 ダイラタント特性シート状部材
【特許請求の範囲】
【請求項1】
バンパリインホースメントとバンパカバーとの間に配置されたバンパアブソーバと、バンパアブソーバの上側に配置された圧力チャンバおよび該圧力チャンバに接続された圧力センサとを有する衝突検知装置と、を備えた自動車用バンパ装置であって、前記バンパアブソーバ内には車両幅方向に延びるダイラタント特性を有するシート状部材が配置されている、衝突検知装置を備えた自動車用バンパ装置。
【請求項2】
前記圧力センサが歩行者衝突を判定する第1の荷重閾値と第1の荷重閾値より大きい車両衝突を判定する第2の荷重閾値を有し、該第2の荷重閾値が、前記圧力センサのダイナミックレンジのうちバンパアブソーバ内にダイラタント特性シート状部材を配置したことにより拡大された部分に設定されている請求項1記載の衝突検知装置を備えた自動車用バンパ装置。
【請求項3】
前記ダイラタント特性シート状部材は前記バンパアブソーバ内で前記圧力チャンバ側に寄せて配置されている、請求項1または請求項2記載の衝突検知装置を備えた自動車用バンパ装置。
【請求項4】
前記ダイラタント特性シート状部材は車両前後方向に互いに間隔をもたせて複数段配置されており、前側のダイラタント特性シート状部材の上下方向幅はそれより後側のダイラタント特性シート状部材の上下方向幅以下であり、正面視で前側のダイラタント特性シート状部材はそれより後側のダイラタント特性シート状部材にオーバラップしている請求項1〜請求項3の何れか1項に記載の衝突検知装置を備えた自動車用バンパ装置。
【請求項1】
バンパリインホースメントとバンパカバーとの間に配置されたバンパアブソーバと、バンパアブソーバの上側に配置された圧力チャンバおよび該圧力チャンバに接続された圧力センサとを有する衝突検知装置と、を備えた自動車用バンパ装置であって、前記バンパアブソーバ内には車両幅方向に延びるダイラタント特性を有するシート状部材が配置されている、衝突検知装置を備えた自動車用バンパ装置。
【請求項2】
前記圧力センサが歩行者衝突を判定する第1の荷重閾値と第1の荷重閾値より大きい車両衝突を判定する第2の荷重閾値を有し、該第2の荷重閾値が、前記圧力センサのダイナミックレンジのうちバンパアブソーバ内にダイラタント特性シート状部材を配置したことにより拡大された部分に設定されている請求項1記載の衝突検知装置を備えた自動車用バンパ装置。
【請求項3】
前記ダイラタント特性シート状部材は前記バンパアブソーバ内で前記圧力チャンバ側に寄せて配置されている、請求項1または請求項2記載の衝突検知装置を備えた自動車用バンパ装置。
【請求項4】
前記ダイラタント特性シート状部材は車両前後方向に互いに間隔をもたせて複数段配置されており、前側のダイラタント特性シート状部材の上下方向幅はそれより後側のダイラタント特性シート状部材の上下方向幅以下であり、正面視で前側のダイラタント特性シート状部材はそれより後側のダイラタント特性シート状部材にオーバラップしている請求項1〜請求項3の何れか1項に記載の衝突検知装置を備えた自動車用バンパ装置。
【図1】


【図2】
【図3】

【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2012−183921(P2012−183921A)
【公開日】平成24年9月27日(2012.9.27)
【国際特許分類】
【出願番号】特願2011−48485(P2011−48485)
【出願日】平成23年3月7日(2011.3.7)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
【公開日】平成24年9月27日(2012.9.27)
【国際特許分類】
【出願日】平成23年3月7日(2011.3.7)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
[ Back to top ]