
表示システム
【課題】
利用者の頭部に表示装置を装着する必要がなく、空間を選ばずに全方位投写を可能とする表示システムを提供する。
【解決手段】
表示システム100は、互いに直交するX軸及びY軸によって定義される投写面に対して、X軸及びY軸に直交するZ軸に沿って映像光を投写する。表示システム100は、スキャン光源10と、トロイダル反射ミラー20とを備える。トロイダル反射ミラー20は、トロイダル形状を有するミラー面21を有する。ミラー面21は、Z軸に沿った映像光の走査に伴って、投写面上において映像光の照射位置をY軸に沿って移動させる形状を有しており、かつ、トロイダル反射ミラー20の回転に伴って、投写面上において映像光の照射位置をX軸に沿って移動させる形状を有する。
利用者の頭部に表示装置を装着する必要がなく、空間を選ばずに全方位投写を可能とする表示システムを提供する。
【解決手段】
表示システム100は、互いに直交するX軸及びY軸によって定義される投写面に対して、X軸及びY軸に直交するZ軸に沿って映像光を投写する。表示システム100は、スキャン光源10と、トロイダル反射ミラー20とを備える。トロイダル反射ミラー20は、トロイダル形状を有するミラー面21を有する。ミラー面21は、Z軸に沿った映像光の走査に伴って、投写面上において映像光の照射位置をY軸に沿って移動させる形状を有しており、かつ、トロイダル反射ミラー20の回転に伴って、投写面上において映像光の照射位置をX軸に沿って移動させる形状を有する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、互いに直交するX軸及びY軸によって定義される投写面に対して、X軸及びY軸に直交するZ軸に沿って映像光を投写する表示システムに関する。
【背景技術】
【0002】
近年、遠隔地に存在しているような印象を利用者に与える技術が提案されている。このような技術としては、(1)没入型ディスプレイシステム(IPT:Immersive Projection Technology)、(2)頭部搭載型ディスプレイシステム(HMD:Head Mounted Display)などが知られている。
【0003】
或いは、全方位投写を実現する技術として、回転鏡及び環状鏡を用いる表示システムも提案されている(例えば、特許文献1)。詳細には、回転鏡は、表示システムの光軸を回転軸として回転するように構成される。環状鏡は、回転軸(光軸)を中心とする開口を有する。回転鏡は、高精細映像を構成する光をスクリーン上に反射して、回転鏡は、広視野映像を構成する光をスクリーン上に反射する。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2002−112094号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、(1)IPTでは、複数の表示装置が必要であり、特殊な空間(例えば、略立方体の空間)が必要である。従って、(1)IPTは、高価であり、利便性に優れない。(2)HMDでは、利用者の頭部に表示装置を装着する必要があり、眼精疲労を生じやすく、装着感に優れない。
【0006】
また、上述した表示システムは、広視野映像に高精細映像を重畳しているに過ぎない。言い換えると、広視野映像を構成する光を反射する環状鏡は、例えば、円筒の内面を構成するスクリーンにしか適用することができない。すなわち、特殊な空間が必要であるという点で、(1)IPTと変わらない。
【0007】
そこで、本発明は、上述した課題を解決するためになされたものであり、利用者の頭部に表示装置を装着する必要がなく、空間を選ばずに全方位投写を可能とする表示システムを提供することを目的とする。
【課題を解決するための手段】
【0008】
第1の特徴に係る表示システム(表示システム100)は、互いに直交するX軸及びY軸によって定義される投写面に対して、前記X軸及び前記Y軸に直交するZ軸に沿って映像光を投写する。表示システムは、前記Y軸に沿って前記映像光を出射するように構成されており、前記Z軸に沿って前記映像光を走査することによって、前記投写面上において前記映像光をスキャンするように構成されたスキャン光源(スキャン光源10)と、前記スキャン光源から出射された前記映像光を前記投写面に反射するように構成されており、前記Y軸に沿って延びる回転軸を中心として回転するように構成されたトロイダル反射ミラー(トロイダル反射ミラー20)とを備える。前記トロイダル反射ミラーは、前記Y軸の一方から見て円環形状を有しており、かつ、トロイダル形状を有するミラー面(ミラー面21)を有する。前記ミラー面は、前記Z軸に沿った前記映像光の走査に伴って、前記投写面上において前記映像光の照射位置を前記Y軸に沿って移動させる形状を有しており、かつ、前記トロイダル反射ミラーの回転に伴って、前記投写面上において前記映像光の照射位置を前記X軸に沿って移動させる形状を有する。
【0009】
第1の特徴において、前記ミラー面は、複数のサブミラー面によって構成される。前記複数のサブミラー面のそれぞれは、前記X軸方向の中心位置において、ねじれがない球面或いは非球面形状を有しており、前記X軸方向の中心位置以外において、前記X軸方向及び前記Y軸方向の双方に沿って曲率が変化するねじれ形状を有する。
【0010】
第1の特徴において、表示システムは、前記投写面を撮像する撮像装置(撮像装置30)と、前記投写面の撮像画像に基づいて、前記スキャン光源を制御するように構成された制御部(制御ユニット200)とをさらに備える。
【0011】
第1の特徴において、前記投写面として、4つの投写面が設けられる。前記映像光は、前記4つの投写面のそれぞれに投写される4つのサブ映像光によって構成される。前記スキャン光源は、前記4つのサブ映像光のそれぞれを出射する4つのサブスキャン光源によって構成される。前記ミラー面は、前記4つのサブ映像光のそれぞれを前記4つの投写面のそれぞれに反射する4つのサブミラー面によって構成される。
【0012】
第1の特徴において、前記Y軸は、鉛直方向に延びる軸である。前記スキャン光源は、下方向に前記映像光を出射する。前記スキャン光源は、前記撮像装置の上側に配置される。
【発明の効果】
【0013】
本発明によれば、利用者の頭部に表示装置を装着する必要がなく、空間を選ばずに全方位投写を可能とする表示システムを提供することができる。
【図面の簡単な説明】
【0014】
【図1】図1は、第1実施形態に係る表示システム100の適用シーンを示す図である。
【図2】図2は、第1実施形態に係る表示システム100を示す図である。
【図3】図3は、第1実施形態に係るスキャン光源10を示す図である。
【図4】図4は、第1実施形態に係るスキャン光源10を示す図である。
【図5】図5は、第1実施形態に係るスキャン光源10を示す図である。
【図6】図6は、第1実施形態に係るトロイダル反射ミラー20をY軸の一方から見た図である。
【図7】図7は、図6に示すX部分の拡大模式図である。
【図8】図8は、第1実施形態に係るミラー面21の形状を説明するための図である。
【図9】図9は、第1実施形態に係るミラー面21の形状を説明するための図である。
【図10】図10は、第1実施形態に係るミラー面21の形状を説明するための図である。
【図11】図11は、第1実施形態に係るミラー面21の形状を説明するための図である。
【図12】図12は、第1実施形態に係るミラー面21の形状を説明するための図である。
【図13】図13は、第1実施形態に係る撮像装置30を説明するための図である。
【図14】図14は、第1実施形態に係る撮像装置30を説明するための図である。
【図15】図15は、第1実施形態に係る制御ユニット200を示すブロック図である。
【発明を実施するための形態】
【0015】
以下において、本発明の実施形態に係る表示システムについて、図面を参照しながら説明する。なお、以下の図面の記載において、同一又は類似の部分には、同一又は類似の符号を付している。
【0016】
ただし、図面は模式的なものであり、各寸法の比率などは現実のものとは異なることに留意すべきである。従って、具体的な寸法などは以下の説明を参酌して判断すべきである。また、図面相互間においても互いの寸法の関係や比率が異なる部分が含まれていることは勿論である。
【0017】
[実施形態の概要]
実施形態に係る表示システムは、互いに直交するX軸及びY軸によって定義される投写面に対して、X軸及びY軸に直交するZ軸に沿って映像光を投写する。表示システムは、Y軸に沿って映像光を出射するように構成されており、Z軸に沿って映像光を走査することによって、投写面上において映像光をスキャンするように構成されたスキャン光源と、スキャン光源から出射された映像光を投写面に反射するように構成されており、Y軸に沿って延びる回転軸を中心として回転するように構成されたトロイダル反射ミラーとを備える。トロイダル反射ミラーは、Y軸の一方から見て円環形状を有しており、かつ、トロイダル形状を有するミラー面を有する。ミラー面は、Z軸に沿った映像光の走査に伴って、投写面上において映像光の照射位置をY軸に沿って移動させる形状を有しており、かつ、トロイダル反射ミラーの回転に伴って、投写面上において映像光の照射位置をX軸に沿って移動させる形状を有する。
【0018】
実施形態では、トロイダル反射ミラーは、Y軸に沿って延びる回転軸を中心として回転する。また、トロイダル反射ミラーのミラー面は、Z軸に沿った映像光の走査に伴って、投写面上において映像光の照射位置をY軸に沿って移動させる形状を有する。また、トロイダル反射ミラーのミラー面は、トロイダル反射ミラーの回転に伴って、投写面上において映像光の照射位置をX軸に沿って移動させる形状を有する。
【0019】
従って、スキャン光源から出射された映像光の走査及びトロイダル反射ミラーの回転によって、全方位投写を行うことができる。また、スキャン光源制御によって、空間に合わせて全方位投写を行うことができる。
【0020】
詳細には、ミラー面は、投写面上に表示される映像の各画素(座標)に映像光を反射するために、各画素(座標)に対応する複数の画素ミラーを有する。各画素ミラーの傾きは、Z軸に沿った映像光の走査に伴って、投写面上において映像光の照射位置をX軸に沿って移動させるように設計される。また、各画素ミラーの傾きは、トロイダル反射ミラーの回転に伴って、投写面上において映像光の照射位置をX軸に沿って移動させるように設計される。
【0021】
なお、表示システムは、遠隔地に存在しているような印象を利用者に与える技術に用いられる。
【0022】
[第1実施形態]
(表示システム)
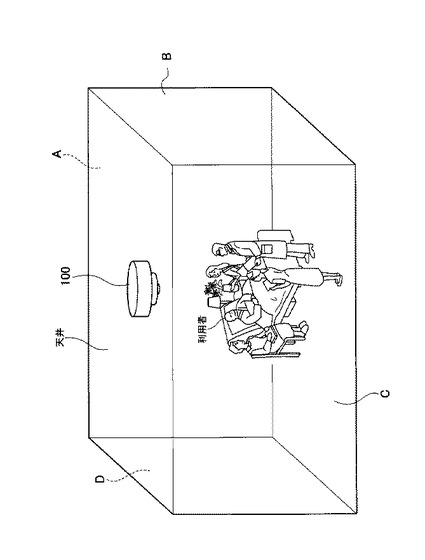
以下において、第1実施形態に係る表示システムについて、図面を参照しながら説明する。図1は、第1実施形態に係る表示システム100の適用シーンを示す図である。図2は、第1実施形態に係る表示システム100を示す図である。
【0023】
図1に示すように、表示システム100は、利用者の居室などで用いられる。例えば、居室は、矩形形状を有しており、4つの壁面(壁面A〜壁面D)が投写面として用いられる。
【0024】
また、表示システム100は、例えば、居室の天井などに設けられる。従って、表示システム100は、居室の天井から居室の壁面に対して映像光を投写する。
【0025】
なお、映像光は、壁面Aに投写されるサブ映像光#A、壁面Bに投写されるサブ映像光#B、壁面Cに投写されるサブ映像光#C、壁面Dに投写されるサブ映像光#Dによって構成される。
【0026】
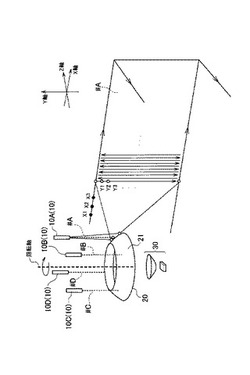
図2に示すように、表示システム100は、スキャン光源10と、トロイダル反射ミラー20と、撮像装置30とを有する。
【0027】
なお、図2では、壁面Aにサブ映像光#Aを投写するケースについて主として説明する。投写面(壁面A)は、互いに直交するX軸及びY軸によって定義される。また、映像光は、X軸及びY軸に直交するZ軸に沿って投写される。なお、Y軸は、鉛直方向に延びる軸である。なお、壁面の位置に応じて、X軸及びZ軸の定義が変わることは勿論である。
【0028】
スキャン光源10は、Y軸に沿って映像光を出射するように構成される。また、スキャン光源10は、Z軸に沿って映像光を走査することによって、投写面上において映像光をスキャンするように構成される。
【0029】
第1実施形態では、スキャン光源10は、サブスキャン光源10A〜サブスキャン光源10Dによって構成される。サブスキャン光源10Aは、壁面Aに投写されるサブ映像光#AをY軸に沿って下方向に出射する。サブスキャン光源10Bは、壁面Bに投写されるサブ映像光#BをY軸に沿って下方向に出射する。サブスキャン光源10Cは、壁面Cに投写されるサブ映像光#CをY軸に沿って下方向に出射する。サブスキャン光源10Dは、壁面Dに投写されるサブ映像光#DをY軸に沿って下方向に出射する。
【0030】
なお、スキャン光源10の詳細については後述する(図3〜図5を参照)。
【0031】
トロイダル反射ミラー20は、スキャン光源10から出射された映像光を投写面に反射するように構成される。また、トロイダル反射ミラー20は、Y軸に沿って延びる回転軸を中心として回転するように構成される。
【0032】
トロイダル反射ミラー20は、Y軸の一方から見て円環形状を有するミラー面21を有する。ミラー面21は、トロイダル形状を有する。
【0033】
具体的には、ミラー面21は、Z軸に沿った映像光の走査に伴って、投写面上において映像光の照射位置をY軸に沿って移動させる形状(図2に示す“Y1”、“Y2”、“Y3”…)を有する。また、ミラー面21は、トロイダル反射ミラー20の回転に伴って、投写面上において映像光の照射位置をX軸に沿って移動させる形状(図2に示す“X1”、“X2”、“X3”…)を有する。
【0034】
なお、トロイダル反射ミラー20の詳細については後述する(図6〜図12を参照)。
【0035】
撮像装置30は、投写面を撮像する。第1実施形態では、撮像装置30は、スキャン光源10の下側に配置される。すなわち、スキャン光源10は、撮像装置30の上側に配置される。
【0036】
例えば、撮像装置30は、双曲面ミラーなどを用いて、壁面A〜壁面Dを撮像する。なお、投写面の撮像画像は、壁面の形状や壁面の境目などを特定するために用いられる。或いは、投写面の撮像画像は、壁面の色を特定するために用いられる。
【0037】
なお、撮像装置30の詳細については後述する(図13〜図14を参照)。
【0038】
(スキャン光源)
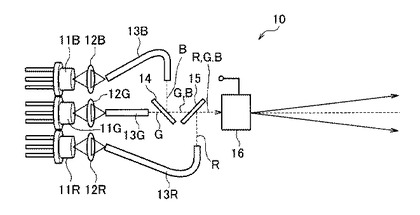
以下において、第1実施形態に係る表示システムについて、図面を参照しながら説明する。図3は、第1実施形態に係るスキャン光源10を示す図である。なお、サブスキャン光源10A〜サブスキャン光源10Dのそれぞれは、図3に示す構成を有することに留意すべきである。
【0039】
スキャン光源10は、複数の光源11(光源11R、光源11G、光源11B)と、複数のコリメーションレンズ12(コリメーションレンズ12R、コリメーションレンズ12G、コリメーションレンズ12B)と、複数のファイバー13(ファイバー13R、ファイバー13G、ファイバー13B)と、ダイクロイックミラー14と、ダイクロイックミラー15と、スキャン光学素子16とを有する。
【0040】
光源11Rは、赤成分光Rを出射するLD(Laser Diode)などの光源である。光源11Rから出射された赤成分光Rは、ファイバー13Rによってダイクロイックミラー15に導かれる。なお、赤成分光Rは、コリメーションレンズ12R及びファイバー13Rによって平行光化される。
【0041】
光源11Gは、緑成分光Gを出射するLD(Laser Diode)などの光源である。光源11Gから出射された緑成分光Gは、ファイバー13Gによってダイクロイックミラー14に導かれる。緑成分光Gは、コリメーションレンズ12G及びファイバー13Gによって平行光化される。
【0042】
光源11Bは、青成分光Bを出射するLD(Laser Diode)などの光源である。光源11Bから出射された青成分光Bは、ファイバー13Bによってダイクロイックミラー14に導かれる。青成分光Bは、コリメーションレンズ12B及びファイバー13Bによって平行光化される。
【0043】
ダイクロイックミラー14は、青成分光Bを反射して、緑成分光Gを透過する。すなわち、ダイクロイックミラー14は、緑成分光G及び青成分光Bを合成する。
【0044】
ダイクロイックミラー15は、赤成分光Rを反射して、緑成分光G及び青成分光Bを透過する。すなわち、ダイクロイックミラー15は、赤成分光R、緑成分光G及び青成分光Bを合成する。
【0045】
ここで、赤成分光R、緑成分光G及び青成分光Bは、時分割で出射される。従って、赤成分光R、緑成分光G及び青成分光Bが同時に重畳されることはないが、1フレーム期間で考えると、赤成分光R、緑成分光G及び青成分光Bが時分割で合成される。
【0046】
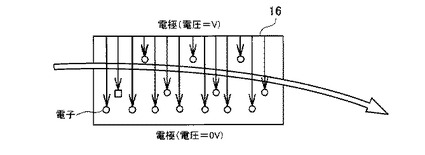
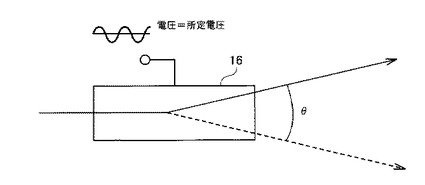
スキャン光学素子16は、ダイクロイックミラー15から出射された映像光を走査する。具体的には、スキャン光学素子16は、図4及び図5に示すように、電圧の印加状態に応じて、所定の振り角θ内で映像光を走査する。言い換えると、電圧の印加状態に応じて、スキャン光学素子16の屈折率が変化することで、映像光の屈折角が変化するため、映像光が走査する。
【0047】
ここで、各色成分光(赤成分光R、緑成分光G及び青成分光B)の屈折率の変化は互いに異なるため、各色成分光を走査する際にスキャン光学素子16に印加される電圧も異なる。詳細には、所定の振り角θが共通となるように、スキャン光学素子16に印加される電圧が制御される。
【0048】
(トロイダル反射ミラー)
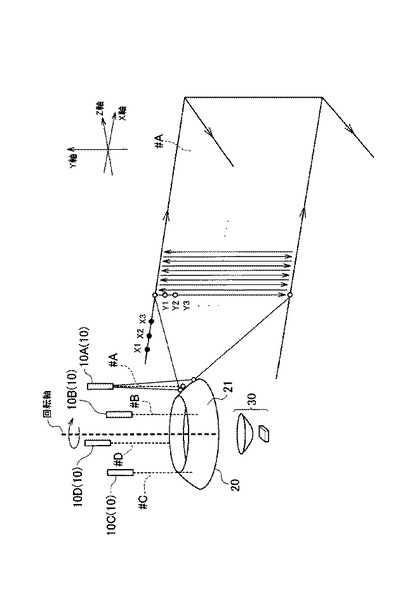
以下において、第1実施形態に係るトロイダル反射ミラーについて、図面を参照しながら説明する。図6は、第1実施形態に係るトロイダル反射ミラー20をY軸の一方から見た図である。
【0049】
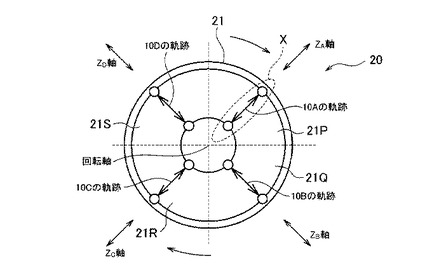
図6に示すように、トロイダル反射ミラー20のミラー面21は、上述したように、Y軸の一方から見て円環形状を有する。ミラー面21は、サブミラー面21P、サブミラー面21Q、サブミラー面21R及びサブミラー面21Sによって構成される。
【0050】
ここでは、サブミラー面21Pがサブスキャン光源10Aから出射されるサブ映像光#Aを反射するケースについて例示されている。しかしながら、トロイダル反射ミラー20が回転軸を中心として回動するため、サブミラー面21Pは、サブスキャン光源10Bから出射されるサブ映像光#Bを反射することもあり、サブスキャン光源10Cから出射されるサブ映像光#Cを反射することもあり、サブスキャン光源10Dから出射されるサブ映像光#Dを反射することもある。なお、サブミラー面21Q、サブミラー面21R及びサブミラー面21Sについても同様である。
【0051】
各スキャン光源10が出射する映像光の軌跡(映像光を走査する向き)は固定的である。すなわち、サブスキャン光源10Aから出射されるサブ映像光#Aの軌跡は、軸ZA(すなわち、壁面Aに対して垂直な軸)に沿っている。同様に、サブスキャン光源10Bから出射されるサブ映像光#Bの軌跡は、軸ZB(すなわち、壁面Bに対して垂直な軸)に沿っている。サブスキャン光源10Cから出射されるサブ映像光#Cの軌跡は、軸ZC(すなわち、壁面Cに対して垂直な軸)に沿っている。サブスキャン光源10Dから出射されるサブ映像光#Dの軌跡は、軸ZD(すなわち、壁面Dに対して垂直な軸)に沿っている。
【0052】
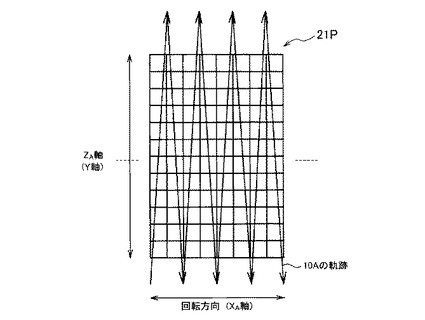
ここで、サブミラー面21Pがサブスキャン光源10Aから出射されるサブ映像光#Aを反射するケースについて、さらに詳細に説明する。図7は、図6に示すX部分の拡大模式図である。図7においては、サブミラー面21Pを固定とした場合に、サブミラー面21Pに照射されるサブ映像光#Aの軌跡が示されている。
【0053】
図7に示すように、サブスキャン光源10Aから出射されるサブ映像光#Aの走査に伴って、サブミラー面21Pにおいてサブ映像光#Aの照射位置は、ZA軸に沿って移動する。これによって、投写面(壁面A)においてサブ映像光#Aの照射位置は、Y軸に沿って移動する。
【0054】
一方で、トロイダル反射ミラー20の回転に伴って、サブミラー面21Pにおいてサブ映像光#Aの照射位置は、トロイダル反射ミラー20の回転方向に沿って移動する。これによって、投写面(壁面A)においてサブ映像光#Aの照射位置は、XA軸に沿って移動する。なお、XA軸は、Y軸(鉛直方向に沿った軸)とともに、投写面(壁面A)を定義する軸であり、Y軸と直交する。すなわち、XA軸は、水平方向に沿った軸である。
【0055】
(ミラー面の形状)
以下において、第1実施形態に係るミラー面の形状について、図面を参照しながら説明する。図8〜図12は、第1実施形態に係るミラー面21の形状を説明するための図である。
【0056】
第1に、ミラー面21が満たすべき曲率半径について、図8〜図10を参照しながら説明する。
【0057】
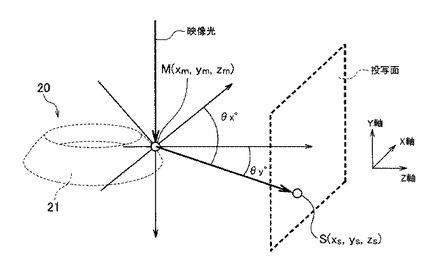
ここでは、図8に示すように、ミラー面21において映像光の照射位置の座標がM(xm、ym、zm)で表され、投写面において映像光の照射位置の座標がS(xs、ys、zs)で表されるケースについて例示する。
【0058】
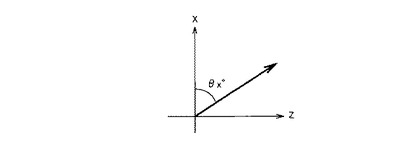
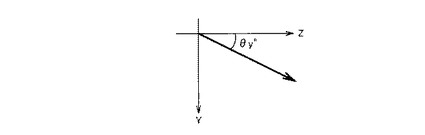
このようなケースにおいて、ミラー面21は、座標M(xm、ym、zm)において、座標S(xs、ys、zs)に対して映像光を反射しなければならない。具体的には、図9に示すように、X軸及びZ軸によって定義されるX−Z平面を考えると、ミラー面21は、座標M(xm、ym、zm)において、θx°の角度で映像光を反射しなければならない。一方で、図10に示すように、Y軸及びZ軸によって定義されるY−Z平面を考えると、ミラー面21は、座標M(xm、ym、zm)において、θy°の角度で映像光を反射しなければならない。
【0059】
このような映像光の反射を実現するために、ミラー面21の曲率半径は、以下の式(1)及び式(2)で定めることが可能である。ここでは、Y軸方向におけるミラー面21の曲率半径がM(y)で表されており、X軸方向におけるミラー面21の曲率半径がN(y)で表される。
【数1】

【0060】
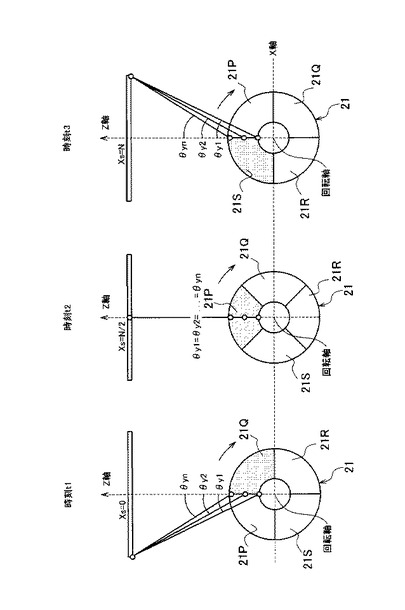
第2に、ミラー面21が満たすべきねじれ量について、図11〜図12を参照しながら説明する。なお、図11は、ミラー面21をY軸の一方から見た図である。なお、サブミラー面21P〜サブミラー面21Sによって構成されるミラー面21は、例えば、1/60×4秒で1回転する。すなわち、1つのサブミラー面は、1秒間において、映像光を60回反射する。
【0061】
図11に示すように、X軸及びZ軸によって定義されるX−Z平面を考えた場合に、時刻t1〜時刻t3において、ミラー面21が映像光を反射する向きが異なる。ここでは、投写面上におけるX軸の座標Xsは、“0”〜“N”の範囲に含まれる値である。時刻t1は、投写面上におけるX軸の座標Xs“0”に映像光を反射するために、スキャン光源10から出射される映像光を走査するケースを示している。時刻t2は、投写面上におけるX軸の座標Xs“N/2”に映像光を反射するために、スキャン光源10から出射される映像光を走査するケースを示している。時刻t3は、投写面上におけるX軸の座標Xs“N”に映像光を反射するために、スキャン光源10から出射される映像光を走査するケースを示している。
【0062】
詳細には、Z軸に沿った映像光の走査によって、映像光の照射位置は、座標y1、座標y2…座標ynの順に移動する。このようなケースにおいて、X−Z平面において、各座標で映像光を反射する角度θは、θy1、θy2…θynの順に変化する。
【0063】
ここで、時刻t1及び時刻t3においては、各座標で映像光を反射する角度θが互いに異なる。すなわち、θy1、θy2…θynは互いに異なる。
【0064】
一方で、時刻t2においては、各座標で映像光を反射する角度θが互いに同じである。すなわち、θy1、θy2…θynは互いに同じである。
【0065】
ここで、上述したように、ミラー面21は、Y軸方向においてM(y)の曲率半径を有しており、X軸方向においてN(y)の曲率半径を有している(図8〜図10)。
【0066】
これに加えて、図11に示すように、Z軸上において、トロイダル反射ミラー20の回転軸からの距離に応じて、ミラー面21の角度が順に異なっている必要がある。また、トロイダル反射ミラー20の回転方向における位置に応じて、ミラー面21の角度が順に異なっている必要がある。
【0067】
従って、ミラー面21は、投写面上に表示される映像の各画素(座標)に映像光を反射するために、各画素(座標)に対応する複数の画素ミラーを有している必要がある。各画素ミラーの傾きは、Z軸に沿った映像光の走査に伴って、投写面上において映像光の照射位置をX軸に沿って移動させるように設計される。また、各画素ミラーの傾きは、トロイダル反射ミラーの回転に伴って、投写面上において映像光の照射位置をX軸に沿って移動させるように設計される。
【0068】
ここで、各画素ミラーの座標M(xm,ym,zm)で光線を反射させて、各投写座標S(xs,ys,zs)に光線を投写するための面形状を説明するために、ねじれ量δ(y)という変数を定義する。各画素ミラーについて、ねじれ量δ(y)が反映された座繰り量Zは、以下の式(3)によって表される。
【数2】
【0069】
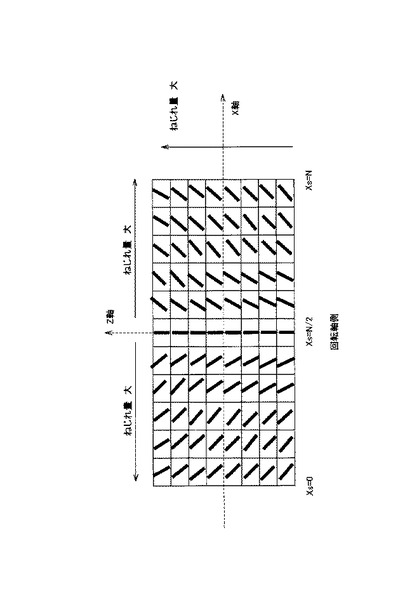
各画素に対応する画素ミラーの傾きは、図12に示すように、各サブミラー面の中心座標に対して対称で異なるねじれ量を有する。なお、図12は、ミラー面21(ここでは、1つのサブミラー面)に設けられる各画素ミラーのねじれ量を模式的に示しているものであり、Y軸方向から見た角度を示すものではない。
【0070】
各画素ミラーのねじれ量は、ミラー面21の入射位置M(xm,ym,zm)から投写位置S(xs,ys,zs)までの距離と図11に示すθyから算出できる。
【0071】
図12に示すように、投写面上においてX軸の中心座標”N/2”から離れるほど、画素ミラーの傾きのねじれ量が大きい。また、トロイダル反射ミラー20の回転軸の中心から離れるほど、画素ミラーの傾きのねじれ量が大きい。なお、各サブミラー面のX軸の中心はねじれを有しない。
【0072】
すなわち、トロイダル反射ミラー20のミラー面21は、複数のサブミラー面によって構成されており、複数のサブミラー面のそれぞれは、X軸方向の中心位置において、ねじれがない球面或いは非球面形状を有しており、X軸方向の中心位置以外において、前記X軸方向及び前記Y軸方向の双方に沿って曲率が変化するねじれ形状を有する。言い換えると、ミラー面21において、X軸方向及びY軸方向における曲率が異なっており、かつ、X軸方向及びY軸方向における曲率が一様ではなく、X軸方向及びY軸方向における曲率のそれぞれが一定量ずつ歪んでいる。上述したねじれ量は、このような歪みの量であり、サブミラー面の中心座標(中心位置)に対して対称で異なっている。
【0073】
このように、ミラー面21は、それぞれ異なる面傾斜の画素ミラーが連続的に繋がった面形状をサブミラー面ごとに有する。ねじれ量を反映した形状に面形状を最適化することによって、ミラー面21で反射された光線は、それぞれ対応した位置に対して、歪まずに投写される。
【0074】
(撮像装置)
以下において、第1実施形態に係る撮像装置について、図面を参照しながら説明する。図13及び図14は、第1実施形態に係る撮像装置30を説明するための図である。
【0075】
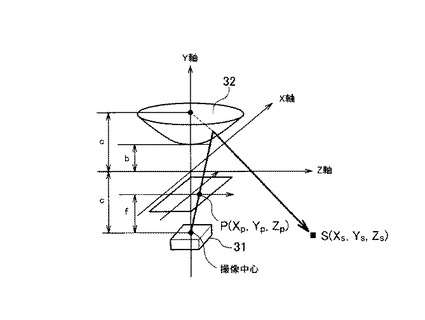
図13に示すように、撮像装置30は、撮像素子31と、双曲面ミラー32とを有する。撮像素子31は、双曲面ミラー32で反射された光を取り込むように構成される。撮像素子31の撮像方向は、Y軸(ここでは、鉛直方向に沿った軸)に沿って上方向である。双曲面ミラー32は、双曲面によって構成されるミラー面を有する。双曲面ミラー32は、双曲面によって構成されるミラー面が撮像素子31と対向するように配置される。
【0076】
ここで、投写面の座標系における座標S(Xs,Ys,Zs)は、撮像素子31の座標系における座標P(Xp,Yp,Zp)として取得される。このような場合において、Y座標を“0”とした場合に、座標Xp及びZpは、以下の式(4)及び式(5)によって表される。
【数3】
【0077】
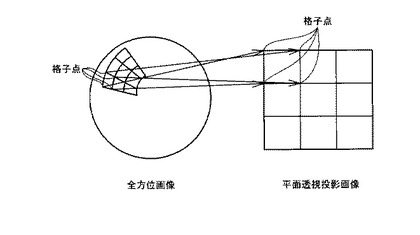
図14に示すように、全方位画像が平面透視投影画像に変換される。なお、全方位画像は、双曲面ミラー32で反射される光によって構成される画像である。平面透視投影画像は、撮像素子31の座標系に投影された2次元平面画像である。
【0078】
(制御ユニットの構成)
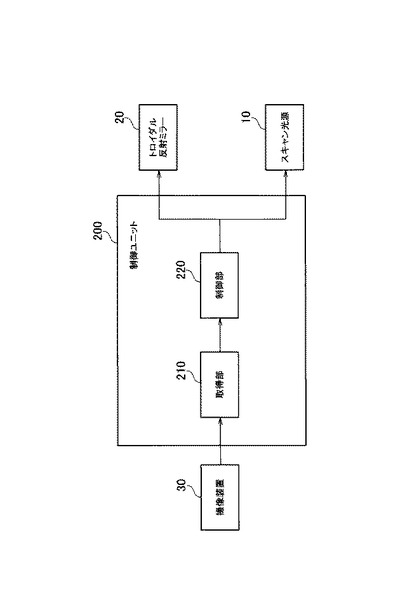
以下において、第1実施形態に係る制御ユニットについて、図面を参照しながら説明する。図15は、第1実施形態に係る制御ユニット200を示すブロック図である。制御ユニット200は、表示システム100に設けられる。
【0079】
なお、図15では明示していないが、制御ユニット200は、映像入力信号を映像出力信号に変換する。映像入力信号は、赤入力信号Rin、緑入力信号Gin及び青入力信号Binによって構成される。映像出力信号は、赤出力信号Rout、緑出力信号Gout及び青出力信号Boutによって構成される。映像入力信号及び映像出力信号は、1フレームを構成する複数の画素毎に入力される信号である。映像入力信号は、遠隔地で全方位を撮像する全方位カメラ、TVチューナ、パーソナルコンピュータ、スマートフォンなどの外部装置(不図示)から取得される。
【0080】
図15に示すように、制御ユニット200は、取得部210と、制御部220とを有する。
【0081】
取得部210は、撮像装置30に接続されており、投写面の撮像画像を撮像装置30から取得する。投写面の撮像画像は、壁面の形状や壁面の境目などを特定するために用いられる。或いは、投写面の撮像画像は、壁面の色を特定するために用いられる。
【0082】
制御部220は、スキャン光源10及びトロイダル反射ミラー20に接続されており、スキャン光源10及びトロイダル反射ミラー20を制御する。
【0083】
第1に、制御部220は、映像出力信号に基づいて、スキャン光源10から出射される映像光(赤成分光R、緑成分光G、青成分光B)を制御する。具体的には、制御部220は、映像光のパルス点灯によって階調を表現する。なお、制御部220は、壁面の色が特定される場合には、壁色補正を行う機能を有していてもよい。
【0084】
第2に、制御部220は、投写面の撮像画像に基づいて、壁面の形状や壁面の境目などを特定する。続いて、制御部220は、スキャン光源10を制御する。
【0085】
例えば、天井側から見て、居室が正方形であり、かつ、表示システム100が居室の中心に設けられる場合には、壁面A〜壁面D(投写面)に対するサブ映像光の投写角度が同じである。このようなケースでは、制御部220は、いずれかの壁面に合わせて、スキャン光源10のスキャン速度及びスキャン範囲を調整すればよい。
【0086】
或いは、天井側から見て、居室が長方形であり、かつ、表示システム100が居室の中心に設けられる場合には、壁面A〜壁面D(投写面)に対するサブ映像光の投写角度が異なる。このようなケースでは、制御部220は、壁面A〜壁面Dのうち、長手方向を構成する壁面に合わせて、長手方向を構成する壁面にサブ映像光を出射するサブスキャン光源のスキャン速度及びスキャン範囲を調整する。同様に、制御部220は、壁面A〜壁面Dのうち、短手方向を構成する壁面に合わせて、短手方向を構成する壁面にサブ映像光を出射するサブスキャン光源のスキャン速度及びスキャン範囲を調整する。
【0087】
なお、トロイダル反射ミラー20の回転方向において、サブスキャン光源のスキャン範囲を調整することによって、サブ映像光の投写角度を調整可能であることに留意すべきである。言い換えると、ミラー面21(サブミラー面)の一部にサブ映像光が照射されるようにサブスキャン光源のスキャン範囲を制御することによって、サブ映像光の投写角度を調整可能である。
【0088】
(作用及び効果)
第1実施形態では、トロイダル反射ミラー20は、Y軸に沿って延びる回転軸を中心として回転する。また、トロイダル反射ミラー20のミラー面21は、Z軸に沿った映像光の走査に伴って、投写面上において映像光の照射位置をY軸に沿って移動させる形状を有する。また、トロイダル反射ミラー20のミラー面21は、トロイダル反射ミラー20の回転に伴って、投写面上において映像光の照射位置をX軸に沿って移動させる形状を有する。
【0089】
従って、スキャン光源10から出射された映像光の走査及びトロイダル反射ミラー20の回転によって、全方位投写を行うことができる。また、スキャン光源10の制御によって、空間に合わせて全方位投写を行うことができる。
【0090】
[その他の実施形態]
本発明は上述した実施形態によって説明したが、この開示の一部をなす論述及び図面は、この発明を限定するものであると理解すべきではない。この開示から当業者には様々な代替実施形態、実施例及び運用技術が明らかとなろう。
【0091】
実施形態では、居室が4つの壁面を有するケースについて主として説明した。しかしながら、実施形態は、これに限定されるものではない。例えば、居室は、円筒の壁面を有していてもよく、5つ以上の壁面を有していてもよい。すなわち、投写面の数は、4つに限定されるものではない。
【0092】
実施形態では、Y軸は、鉛直方向に延びる軸であるケースについて主として説明した。しかしながら、実施形態は、これに限定されるものではない。例えば、Y軸は、水平方向に延びる軸であってもよい。
【0093】
実施形態では、スキャン光学素子16を用いる光学的な走査について例示した。しかしながら、ポリゴン・ガルバノミラー等の部材を用いる機械的な走査が用いられてもよい。また、ダイクロイックキューブ等を用いて波長特性によって色成分光を合成してもよく、PBS(Polarization Beam Splitter)等を用いて偏光特性によって色成分を合成してもよい。また、スキャン光源10の数は、4つに限定されるものではなく、5つ以上であってもよく、3つ以下であってもよい。
【符号の説明】
【0094】
10…スキャン光源、11…光源、12…コリメーションレンズ、13…ファイバー、14…ダイクロイックミラー、15…ダイクロイックミラー、16…スキャン光学素子、20…トロイダル反射ミラー、21…ミラー面、30…撮像装置、31…撮像素子、32…双曲面ミラー、100…表示システム、200…制御ユニット、210…取得部、220…制御部
【技術分野】
【0001】
本発明は、互いに直交するX軸及びY軸によって定義される投写面に対して、X軸及びY軸に直交するZ軸に沿って映像光を投写する表示システムに関する。
【背景技術】
【0002】
近年、遠隔地に存在しているような印象を利用者に与える技術が提案されている。このような技術としては、(1)没入型ディスプレイシステム(IPT:Immersive Projection Technology)、(2)頭部搭載型ディスプレイシステム(HMD:Head Mounted Display)などが知られている。
【0003】
或いは、全方位投写を実現する技術として、回転鏡及び環状鏡を用いる表示システムも提案されている(例えば、特許文献1)。詳細には、回転鏡は、表示システムの光軸を回転軸として回転するように構成される。環状鏡は、回転軸(光軸)を中心とする開口を有する。回転鏡は、高精細映像を構成する光をスクリーン上に反射して、回転鏡は、広視野映像を構成する光をスクリーン上に反射する。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2002−112094号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、(1)IPTでは、複数の表示装置が必要であり、特殊な空間(例えば、略立方体の空間)が必要である。従って、(1)IPTは、高価であり、利便性に優れない。(2)HMDでは、利用者の頭部に表示装置を装着する必要があり、眼精疲労を生じやすく、装着感に優れない。
【0006】
また、上述した表示システムは、広視野映像に高精細映像を重畳しているに過ぎない。言い換えると、広視野映像を構成する光を反射する環状鏡は、例えば、円筒の内面を構成するスクリーンにしか適用することができない。すなわち、特殊な空間が必要であるという点で、(1)IPTと変わらない。
【0007】
そこで、本発明は、上述した課題を解決するためになされたものであり、利用者の頭部に表示装置を装着する必要がなく、空間を選ばずに全方位投写を可能とする表示システムを提供することを目的とする。
【課題を解決するための手段】
【0008】
第1の特徴に係る表示システム(表示システム100)は、互いに直交するX軸及びY軸によって定義される投写面に対して、前記X軸及び前記Y軸に直交するZ軸に沿って映像光を投写する。表示システムは、前記Y軸に沿って前記映像光を出射するように構成されており、前記Z軸に沿って前記映像光を走査することによって、前記投写面上において前記映像光をスキャンするように構成されたスキャン光源(スキャン光源10)と、前記スキャン光源から出射された前記映像光を前記投写面に反射するように構成されており、前記Y軸に沿って延びる回転軸を中心として回転するように構成されたトロイダル反射ミラー(トロイダル反射ミラー20)とを備える。前記トロイダル反射ミラーは、前記Y軸の一方から見て円環形状を有しており、かつ、トロイダル形状を有するミラー面(ミラー面21)を有する。前記ミラー面は、前記Z軸に沿った前記映像光の走査に伴って、前記投写面上において前記映像光の照射位置を前記Y軸に沿って移動させる形状を有しており、かつ、前記トロイダル反射ミラーの回転に伴って、前記投写面上において前記映像光の照射位置を前記X軸に沿って移動させる形状を有する。
【0009】
第1の特徴において、前記ミラー面は、複数のサブミラー面によって構成される。前記複数のサブミラー面のそれぞれは、前記X軸方向の中心位置において、ねじれがない球面或いは非球面形状を有しており、前記X軸方向の中心位置以外において、前記X軸方向及び前記Y軸方向の双方に沿って曲率が変化するねじれ形状を有する。
【0010】
第1の特徴において、表示システムは、前記投写面を撮像する撮像装置(撮像装置30)と、前記投写面の撮像画像に基づいて、前記スキャン光源を制御するように構成された制御部(制御ユニット200)とをさらに備える。
【0011】
第1の特徴において、前記投写面として、4つの投写面が設けられる。前記映像光は、前記4つの投写面のそれぞれに投写される4つのサブ映像光によって構成される。前記スキャン光源は、前記4つのサブ映像光のそれぞれを出射する4つのサブスキャン光源によって構成される。前記ミラー面は、前記4つのサブ映像光のそれぞれを前記4つの投写面のそれぞれに反射する4つのサブミラー面によって構成される。
【0012】
第1の特徴において、前記Y軸は、鉛直方向に延びる軸である。前記スキャン光源は、下方向に前記映像光を出射する。前記スキャン光源は、前記撮像装置の上側に配置される。
【発明の効果】
【0013】
本発明によれば、利用者の頭部に表示装置を装着する必要がなく、空間を選ばずに全方位投写を可能とする表示システムを提供することができる。
【図面の簡単な説明】
【0014】
【図1】図1は、第1実施形態に係る表示システム100の適用シーンを示す図である。
【図2】図2は、第1実施形態に係る表示システム100を示す図である。
【図3】図3は、第1実施形態に係るスキャン光源10を示す図である。
【図4】図4は、第1実施形態に係るスキャン光源10を示す図である。
【図5】図5は、第1実施形態に係るスキャン光源10を示す図である。
【図6】図6は、第1実施形態に係るトロイダル反射ミラー20をY軸の一方から見た図である。
【図7】図7は、図6に示すX部分の拡大模式図である。
【図8】図8は、第1実施形態に係るミラー面21の形状を説明するための図である。
【図9】図9は、第1実施形態に係るミラー面21の形状を説明するための図である。
【図10】図10は、第1実施形態に係るミラー面21の形状を説明するための図である。
【図11】図11は、第1実施形態に係るミラー面21の形状を説明するための図である。
【図12】図12は、第1実施形態に係るミラー面21の形状を説明するための図である。
【図13】図13は、第1実施形態に係る撮像装置30を説明するための図である。
【図14】図14は、第1実施形態に係る撮像装置30を説明するための図である。
【図15】図15は、第1実施形態に係る制御ユニット200を示すブロック図である。
【発明を実施するための形態】
【0015】
以下において、本発明の実施形態に係る表示システムについて、図面を参照しながら説明する。なお、以下の図面の記載において、同一又は類似の部分には、同一又は類似の符号を付している。
【0016】
ただし、図面は模式的なものであり、各寸法の比率などは現実のものとは異なることに留意すべきである。従って、具体的な寸法などは以下の説明を参酌して判断すべきである。また、図面相互間においても互いの寸法の関係や比率が異なる部分が含まれていることは勿論である。
【0017】
[実施形態の概要]
実施形態に係る表示システムは、互いに直交するX軸及びY軸によって定義される投写面に対して、X軸及びY軸に直交するZ軸に沿って映像光を投写する。表示システムは、Y軸に沿って映像光を出射するように構成されており、Z軸に沿って映像光を走査することによって、投写面上において映像光をスキャンするように構成されたスキャン光源と、スキャン光源から出射された映像光を投写面に反射するように構成されており、Y軸に沿って延びる回転軸を中心として回転するように構成されたトロイダル反射ミラーとを備える。トロイダル反射ミラーは、Y軸の一方から見て円環形状を有しており、かつ、トロイダル形状を有するミラー面を有する。ミラー面は、Z軸に沿った映像光の走査に伴って、投写面上において映像光の照射位置をY軸に沿って移動させる形状を有しており、かつ、トロイダル反射ミラーの回転に伴って、投写面上において映像光の照射位置をX軸に沿って移動させる形状を有する。
【0018】
実施形態では、トロイダル反射ミラーは、Y軸に沿って延びる回転軸を中心として回転する。また、トロイダル反射ミラーのミラー面は、Z軸に沿った映像光の走査に伴って、投写面上において映像光の照射位置をY軸に沿って移動させる形状を有する。また、トロイダル反射ミラーのミラー面は、トロイダル反射ミラーの回転に伴って、投写面上において映像光の照射位置をX軸に沿って移動させる形状を有する。
【0019】
従って、スキャン光源から出射された映像光の走査及びトロイダル反射ミラーの回転によって、全方位投写を行うことができる。また、スキャン光源制御によって、空間に合わせて全方位投写を行うことができる。
【0020】
詳細には、ミラー面は、投写面上に表示される映像の各画素(座標)に映像光を反射するために、各画素(座標)に対応する複数の画素ミラーを有する。各画素ミラーの傾きは、Z軸に沿った映像光の走査に伴って、投写面上において映像光の照射位置をX軸に沿って移動させるように設計される。また、各画素ミラーの傾きは、トロイダル反射ミラーの回転に伴って、投写面上において映像光の照射位置をX軸に沿って移動させるように設計される。
【0021】
なお、表示システムは、遠隔地に存在しているような印象を利用者に与える技術に用いられる。
【0022】
[第1実施形態]
(表示システム)
以下において、第1実施形態に係る表示システムについて、図面を参照しながら説明する。図1は、第1実施形態に係る表示システム100の適用シーンを示す図である。図2は、第1実施形態に係る表示システム100を示す図である。
【0023】
図1に示すように、表示システム100は、利用者の居室などで用いられる。例えば、居室は、矩形形状を有しており、4つの壁面(壁面A〜壁面D)が投写面として用いられる。
【0024】
また、表示システム100は、例えば、居室の天井などに設けられる。従って、表示システム100は、居室の天井から居室の壁面に対して映像光を投写する。
【0025】
なお、映像光は、壁面Aに投写されるサブ映像光#A、壁面Bに投写されるサブ映像光#B、壁面Cに投写されるサブ映像光#C、壁面Dに投写されるサブ映像光#Dによって構成される。
【0026】
図2に示すように、表示システム100は、スキャン光源10と、トロイダル反射ミラー20と、撮像装置30とを有する。
【0027】
なお、図2では、壁面Aにサブ映像光#Aを投写するケースについて主として説明する。投写面(壁面A)は、互いに直交するX軸及びY軸によって定義される。また、映像光は、X軸及びY軸に直交するZ軸に沿って投写される。なお、Y軸は、鉛直方向に延びる軸である。なお、壁面の位置に応じて、X軸及びZ軸の定義が変わることは勿論である。
【0028】
スキャン光源10は、Y軸に沿って映像光を出射するように構成される。また、スキャン光源10は、Z軸に沿って映像光を走査することによって、投写面上において映像光をスキャンするように構成される。
【0029】
第1実施形態では、スキャン光源10は、サブスキャン光源10A〜サブスキャン光源10Dによって構成される。サブスキャン光源10Aは、壁面Aに投写されるサブ映像光#AをY軸に沿って下方向に出射する。サブスキャン光源10Bは、壁面Bに投写されるサブ映像光#BをY軸に沿って下方向に出射する。サブスキャン光源10Cは、壁面Cに投写されるサブ映像光#CをY軸に沿って下方向に出射する。サブスキャン光源10Dは、壁面Dに投写されるサブ映像光#DをY軸に沿って下方向に出射する。
【0030】
なお、スキャン光源10の詳細については後述する(図3〜図5を参照)。
【0031】
トロイダル反射ミラー20は、スキャン光源10から出射された映像光を投写面に反射するように構成される。また、トロイダル反射ミラー20は、Y軸に沿って延びる回転軸を中心として回転するように構成される。
【0032】
トロイダル反射ミラー20は、Y軸の一方から見て円環形状を有するミラー面21を有する。ミラー面21は、トロイダル形状を有する。
【0033】
具体的には、ミラー面21は、Z軸に沿った映像光の走査に伴って、投写面上において映像光の照射位置をY軸に沿って移動させる形状(図2に示す“Y1”、“Y2”、“Y3”…)を有する。また、ミラー面21は、トロイダル反射ミラー20の回転に伴って、投写面上において映像光の照射位置をX軸に沿って移動させる形状(図2に示す“X1”、“X2”、“X3”…)を有する。
【0034】
なお、トロイダル反射ミラー20の詳細については後述する(図6〜図12を参照)。
【0035】
撮像装置30は、投写面を撮像する。第1実施形態では、撮像装置30は、スキャン光源10の下側に配置される。すなわち、スキャン光源10は、撮像装置30の上側に配置される。
【0036】
例えば、撮像装置30は、双曲面ミラーなどを用いて、壁面A〜壁面Dを撮像する。なお、投写面の撮像画像は、壁面の形状や壁面の境目などを特定するために用いられる。或いは、投写面の撮像画像は、壁面の色を特定するために用いられる。
【0037】
なお、撮像装置30の詳細については後述する(図13〜図14を参照)。
【0038】
(スキャン光源)
以下において、第1実施形態に係る表示システムについて、図面を参照しながら説明する。図3は、第1実施形態に係るスキャン光源10を示す図である。なお、サブスキャン光源10A〜サブスキャン光源10Dのそれぞれは、図3に示す構成を有することに留意すべきである。
【0039】
スキャン光源10は、複数の光源11(光源11R、光源11G、光源11B)と、複数のコリメーションレンズ12(コリメーションレンズ12R、コリメーションレンズ12G、コリメーションレンズ12B)と、複数のファイバー13(ファイバー13R、ファイバー13G、ファイバー13B)と、ダイクロイックミラー14と、ダイクロイックミラー15と、スキャン光学素子16とを有する。
【0040】
光源11Rは、赤成分光Rを出射するLD(Laser Diode)などの光源である。光源11Rから出射された赤成分光Rは、ファイバー13Rによってダイクロイックミラー15に導かれる。なお、赤成分光Rは、コリメーションレンズ12R及びファイバー13Rによって平行光化される。
【0041】
光源11Gは、緑成分光Gを出射するLD(Laser Diode)などの光源である。光源11Gから出射された緑成分光Gは、ファイバー13Gによってダイクロイックミラー14に導かれる。緑成分光Gは、コリメーションレンズ12G及びファイバー13Gによって平行光化される。
【0042】
光源11Bは、青成分光Bを出射するLD(Laser Diode)などの光源である。光源11Bから出射された青成分光Bは、ファイバー13Bによってダイクロイックミラー14に導かれる。青成分光Bは、コリメーションレンズ12B及びファイバー13Bによって平行光化される。
【0043】
ダイクロイックミラー14は、青成分光Bを反射して、緑成分光Gを透過する。すなわち、ダイクロイックミラー14は、緑成分光G及び青成分光Bを合成する。
【0044】
ダイクロイックミラー15は、赤成分光Rを反射して、緑成分光G及び青成分光Bを透過する。すなわち、ダイクロイックミラー15は、赤成分光R、緑成分光G及び青成分光Bを合成する。
【0045】
ここで、赤成分光R、緑成分光G及び青成分光Bは、時分割で出射される。従って、赤成分光R、緑成分光G及び青成分光Bが同時に重畳されることはないが、1フレーム期間で考えると、赤成分光R、緑成分光G及び青成分光Bが時分割で合成される。
【0046】
スキャン光学素子16は、ダイクロイックミラー15から出射された映像光を走査する。具体的には、スキャン光学素子16は、図4及び図5に示すように、電圧の印加状態に応じて、所定の振り角θ内で映像光を走査する。言い換えると、電圧の印加状態に応じて、スキャン光学素子16の屈折率が変化することで、映像光の屈折角が変化するため、映像光が走査する。
【0047】
ここで、各色成分光(赤成分光R、緑成分光G及び青成分光B)の屈折率の変化は互いに異なるため、各色成分光を走査する際にスキャン光学素子16に印加される電圧も異なる。詳細には、所定の振り角θが共通となるように、スキャン光学素子16に印加される電圧が制御される。
【0048】
(トロイダル反射ミラー)
以下において、第1実施形態に係るトロイダル反射ミラーについて、図面を参照しながら説明する。図6は、第1実施形態に係るトロイダル反射ミラー20をY軸の一方から見た図である。
【0049】
図6に示すように、トロイダル反射ミラー20のミラー面21は、上述したように、Y軸の一方から見て円環形状を有する。ミラー面21は、サブミラー面21P、サブミラー面21Q、サブミラー面21R及びサブミラー面21Sによって構成される。
【0050】
ここでは、サブミラー面21Pがサブスキャン光源10Aから出射されるサブ映像光#Aを反射するケースについて例示されている。しかしながら、トロイダル反射ミラー20が回転軸を中心として回動するため、サブミラー面21Pは、サブスキャン光源10Bから出射されるサブ映像光#Bを反射することもあり、サブスキャン光源10Cから出射されるサブ映像光#Cを反射することもあり、サブスキャン光源10Dから出射されるサブ映像光#Dを反射することもある。なお、サブミラー面21Q、サブミラー面21R及びサブミラー面21Sについても同様である。
【0051】
各スキャン光源10が出射する映像光の軌跡(映像光を走査する向き)は固定的である。すなわち、サブスキャン光源10Aから出射されるサブ映像光#Aの軌跡は、軸ZA(すなわち、壁面Aに対して垂直な軸)に沿っている。同様に、サブスキャン光源10Bから出射されるサブ映像光#Bの軌跡は、軸ZB(すなわち、壁面Bに対して垂直な軸)に沿っている。サブスキャン光源10Cから出射されるサブ映像光#Cの軌跡は、軸ZC(すなわち、壁面Cに対して垂直な軸)に沿っている。サブスキャン光源10Dから出射されるサブ映像光#Dの軌跡は、軸ZD(すなわち、壁面Dに対して垂直な軸)に沿っている。
【0052】
ここで、サブミラー面21Pがサブスキャン光源10Aから出射されるサブ映像光#Aを反射するケースについて、さらに詳細に説明する。図7は、図6に示すX部分の拡大模式図である。図7においては、サブミラー面21Pを固定とした場合に、サブミラー面21Pに照射されるサブ映像光#Aの軌跡が示されている。
【0053】
図7に示すように、サブスキャン光源10Aから出射されるサブ映像光#Aの走査に伴って、サブミラー面21Pにおいてサブ映像光#Aの照射位置は、ZA軸に沿って移動する。これによって、投写面(壁面A)においてサブ映像光#Aの照射位置は、Y軸に沿って移動する。
【0054】
一方で、トロイダル反射ミラー20の回転に伴って、サブミラー面21Pにおいてサブ映像光#Aの照射位置は、トロイダル反射ミラー20の回転方向に沿って移動する。これによって、投写面(壁面A)においてサブ映像光#Aの照射位置は、XA軸に沿って移動する。なお、XA軸は、Y軸(鉛直方向に沿った軸)とともに、投写面(壁面A)を定義する軸であり、Y軸と直交する。すなわち、XA軸は、水平方向に沿った軸である。
【0055】
(ミラー面の形状)
以下において、第1実施形態に係るミラー面の形状について、図面を参照しながら説明する。図8〜図12は、第1実施形態に係るミラー面21の形状を説明するための図である。
【0056】
第1に、ミラー面21が満たすべき曲率半径について、図8〜図10を参照しながら説明する。
【0057】
ここでは、図8に示すように、ミラー面21において映像光の照射位置の座標がM(xm、ym、zm)で表され、投写面において映像光の照射位置の座標がS(xs、ys、zs)で表されるケースについて例示する。
【0058】
このようなケースにおいて、ミラー面21は、座標M(xm、ym、zm)において、座標S(xs、ys、zs)に対して映像光を反射しなければならない。具体的には、図9に示すように、X軸及びZ軸によって定義されるX−Z平面を考えると、ミラー面21は、座標M(xm、ym、zm)において、θx°の角度で映像光を反射しなければならない。一方で、図10に示すように、Y軸及びZ軸によって定義されるY−Z平面を考えると、ミラー面21は、座標M(xm、ym、zm)において、θy°の角度で映像光を反射しなければならない。
【0059】
このような映像光の反射を実現するために、ミラー面21の曲率半径は、以下の式(1)及び式(2)で定めることが可能である。ここでは、Y軸方向におけるミラー面21の曲率半径がM(y)で表されており、X軸方向におけるミラー面21の曲率半径がN(y)で表される。
【数1】
【0060】
第2に、ミラー面21が満たすべきねじれ量について、図11〜図12を参照しながら説明する。なお、図11は、ミラー面21をY軸の一方から見た図である。なお、サブミラー面21P〜サブミラー面21Sによって構成されるミラー面21は、例えば、1/60×4秒で1回転する。すなわち、1つのサブミラー面は、1秒間において、映像光を60回反射する。
【0061】
図11に示すように、X軸及びZ軸によって定義されるX−Z平面を考えた場合に、時刻t1〜時刻t3において、ミラー面21が映像光を反射する向きが異なる。ここでは、投写面上におけるX軸の座標Xsは、“0”〜“N”の範囲に含まれる値である。時刻t1は、投写面上におけるX軸の座標Xs“0”に映像光を反射するために、スキャン光源10から出射される映像光を走査するケースを示している。時刻t2は、投写面上におけるX軸の座標Xs“N/2”に映像光を反射するために、スキャン光源10から出射される映像光を走査するケースを示している。時刻t3は、投写面上におけるX軸の座標Xs“N”に映像光を反射するために、スキャン光源10から出射される映像光を走査するケースを示している。
【0062】
詳細には、Z軸に沿った映像光の走査によって、映像光の照射位置は、座標y1、座標y2…座標ynの順に移動する。このようなケースにおいて、X−Z平面において、各座標で映像光を反射する角度θは、θy1、θy2…θynの順に変化する。
【0063】
ここで、時刻t1及び時刻t3においては、各座標で映像光を反射する角度θが互いに異なる。すなわち、θy1、θy2…θynは互いに異なる。
【0064】
一方で、時刻t2においては、各座標で映像光を反射する角度θが互いに同じである。すなわち、θy1、θy2…θynは互いに同じである。
【0065】
ここで、上述したように、ミラー面21は、Y軸方向においてM(y)の曲率半径を有しており、X軸方向においてN(y)の曲率半径を有している(図8〜図10)。
【0066】
これに加えて、図11に示すように、Z軸上において、トロイダル反射ミラー20の回転軸からの距離に応じて、ミラー面21の角度が順に異なっている必要がある。また、トロイダル反射ミラー20の回転方向における位置に応じて、ミラー面21の角度が順に異なっている必要がある。
【0067】
従って、ミラー面21は、投写面上に表示される映像の各画素(座標)に映像光を反射するために、各画素(座標)に対応する複数の画素ミラーを有している必要がある。各画素ミラーの傾きは、Z軸に沿った映像光の走査に伴って、投写面上において映像光の照射位置をX軸に沿って移動させるように設計される。また、各画素ミラーの傾きは、トロイダル反射ミラーの回転に伴って、投写面上において映像光の照射位置をX軸に沿って移動させるように設計される。
【0068】
ここで、各画素ミラーの座標M(xm,ym,zm)で光線を反射させて、各投写座標S(xs,ys,zs)に光線を投写するための面形状を説明するために、ねじれ量δ(y)という変数を定義する。各画素ミラーについて、ねじれ量δ(y)が反映された座繰り量Zは、以下の式(3)によって表される。
【数2】
【0069】
各画素に対応する画素ミラーの傾きは、図12に示すように、各サブミラー面の中心座標に対して対称で異なるねじれ量を有する。なお、図12は、ミラー面21(ここでは、1つのサブミラー面)に設けられる各画素ミラーのねじれ量を模式的に示しているものであり、Y軸方向から見た角度を示すものではない。
【0070】
各画素ミラーのねじれ量は、ミラー面21の入射位置M(xm,ym,zm)から投写位置S(xs,ys,zs)までの距離と図11に示すθyから算出できる。
【0071】
図12に示すように、投写面上においてX軸の中心座標”N/2”から離れるほど、画素ミラーの傾きのねじれ量が大きい。また、トロイダル反射ミラー20の回転軸の中心から離れるほど、画素ミラーの傾きのねじれ量が大きい。なお、各サブミラー面のX軸の中心はねじれを有しない。
【0072】
すなわち、トロイダル反射ミラー20のミラー面21は、複数のサブミラー面によって構成されており、複数のサブミラー面のそれぞれは、X軸方向の中心位置において、ねじれがない球面或いは非球面形状を有しており、X軸方向の中心位置以外において、前記X軸方向及び前記Y軸方向の双方に沿って曲率が変化するねじれ形状を有する。言い換えると、ミラー面21において、X軸方向及びY軸方向における曲率が異なっており、かつ、X軸方向及びY軸方向における曲率が一様ではなく、X軸方向及びY軸方向における曲率のそれぞれが一定量ずつ歪んでいる。上述したねじれ量は、このような歪みの量であり、サブミラー面の中心座標(中心位置)に対して対称で異なっている。
【0073】
このように、ミラー面21は、それぞれ異なる面傾斜の画素ミラーが連続的に繋がった面形状をサブミラー面ごとに有する。ねじれ量を反映した形状に面形状を最適化することによって、ミラー面21で反射された光線は、それぞれ対応した位置に対して、歪まずに投写される。
【0074】
(撮像装置)
以下において、第1実施形態に係る撮像装置について、図面を参照しながら説明する。図13及び図14は、第1実施形態に係る撮像装置30を説明するための図である。
【0075】
図13に示すように、撮像装置30は、撮像素子31と、双曲面ミラー32とを有する。撮像素子31は、双曲面ミラー32で反射された光を取り込むように構成される。撮像素子31の撮像方向は、Y軸(ここでは、鉛直方向に沿った軸)に沿って上方向である。双曲面ミラー32は、双曲面によって構成されるミラー面を有する。双曲面ミラー32は、双曲面によって構成されるミラー面が撮像素子31と対向するように配置される。
【0076】
ここで、投写面の座標系における座標S(Xs,Ys,Zs)は、撮像素子31の座標系における座標P(Xp,Yp,Zp)として取得される。このような場合において、Y座標を“0”とした場合に、座標Xp及びZpは、以下の式(4)及び式(5)によって表される。
【数3】
【0077】
図14に示すように、全方位画像が平面透視投影画像に変換される。なお、全方位画像は、双曲面ミラー32で反射される光によって構成される画像である。平面透視投影画像は、撮像素子31の座標系に投影された2次元平面画像である。
【0078】
(制御ユニットの構成)
以下において、第1実施形態に係る制御ユニットについて、図面を参照しながら説明する。図15は、第1実施形態に係る制御ユニット200を示すブロック図である。制御ユニット200は、表示システム100に設けられる。
【0079】
なお、図15では明示していないが、制御ユニット200は、映像入力信号を映像出力信号に変換する。映像入力信号は、赤入力信号Rin、緑入力信号Gin及び青入力信号Binによって構成される。映像出力信号は、赤出力信号Rout、緑出力信号Gout及び青出力信号Boutによって構成される。映像入力信号及び映像出力信号は、1フレームを構成する複数の画素毎に入力される信号である。映像入力信号は、遠隔地で全方位を撮像する全方位カメラ、TVチューナ、パーソナルコンピュータ、スマートフォンなどの外部装置(不図示)から取得される。
【0080】
図15に示すように、制御ユニット200は、取得部210と、制御部220とを有する。
【0081】
取得部210は、撮像装置30に接続されており、投写面の撮像画像を撮像装置30から取得する。投写面の撮像画像は、壁面の形状や壁面の境目などを特定するために用いられる。或いは、投写面の撮像画像は、壁面の色を特定するために用いられる。
【0082】
制御部220は、スキャン光源10及びトロイダル反射ミラー20に接続されており、スキャン光源10及びトロイダル反射ミラー20を制御する。
【0083】
第1に、制御部220は、映像出力信号に基づいて、スキャン光源10から出射される映像光(赤成分光R、緑成分光G、青成分光B)を制御する。具体的には、制御部220は、映像光のパルス点灯によって階調を表現する。なお、制御部220は、壁面の色が特定される場合には、壁色補正を行う機能を有していてもよい。
【0084】
第2に、制御部220は、投写面の撮像画像に基づいて、壁面の形状や壁面の境目などを特定する。続いて、制御部220は、スキャン光源10を制御する。
【0085】
例えば、天井側から見て、居室が正方形であり、かつ、表示システム100が居室の中心に設けられる場合には、壁面A〜壁面D(投写面)に対するサブ映像光の投写角度が同じである。このようなケースでは、制御部220は、いずれかの壁面に合わせて、スキャン光源10のスキャン速度及びスキャン範囲を調整すればよい。
【0086】
或いは、天井側から見て、居室が長方形であり、かつ、表示システム100が居室の中心に設けられる場合には、壁面A〜壁面D(投写面)に対するサブ映像光の投写角度が異なる。このようなケースでは、制御部220は、壁面A〜壁面Dのうち、長手方向を構成する壁面に合わせて、長手方向を構成する壁面にサブ映像光を出射するサブスキャン光源のスキャン速度及びスキャン範囲を調整する。同様に、制御部220は、壁面A〜壁面Dのうち、短手方向を構成する壁面に合わせて、短手方向を構成する壁面にサブ映像光を出射するサブスキャン光源のスキャン速度及びスキャン範囲を調整する。
【0087】
なお、トロイダル反射ミラー20の回転方向において、サブスキャン光源のスキャン範囲を調整することによって、サブ映像光の投写角度を調整可能であることに留意すべきである。言い換えると、ミラー面21(サブミラー面)の一部にサブ映像光が照射されるようにサブスキャン光源のスキャン範囲を制御することによって、サブ映像光の投写角度を調整可能である。
【0088】
(作用及び効果)
第1実施形態では、トロイダル反射ミラー20は、Y軸に沿って延びる回転軸を中心として回転する。また、トロイダル反射ミラー20のミラー面21は、Z軸に沿った映像光の走査に伴って、投写面上において映像光の照射位置をY軸に沿って移動させる形状を有する。また、トロイダル反射ミラー20のミラー面21は、トロイダル反射ミラー20の回転に伴って、投写面上において映像光の照射位置をX軸に沿って移動させる形状を有する。
【0089】
従って、スキャン光源10から出射された映像光の走査及びトロイダル反射ミラー20の回転によって、全方位投写を行うことができる。また、スキャン光源10の制御によって、空間に合わせて全方位投写を行うことができる。
【0090】
[その他の実施形態]
本発明は上述した実施形態によって説明したが、この開示の一部をなす論述及び図面は、この発明を限定するものであると理解すべきではない。この開示から当業者には様々な代替実施形態、実施例及び運用技術が明らかとなろう。
【0091】
実施形態では、居室が4つの壁面を有するケースについて主として説明した。しかしながら、実施形態は、これに限定されるものではない。例えば、居室は、円筒の壁面を有していてもよく、5つ以上の壁面を有していてもよい。すなわち、投写面の数は、4つに限定されるものではない。
【0092】
実施形態では、Y軸は、鉛直方向に延びる軸であるケースについて主として説明した。しかしながら、実施形態は、これに限定されるものではない。例えば、Y軸は、水平方向に延びる軸であってもよい。
【0093】
実施形態では、スキャン光学素子16を用いる光学的な走査について例示した。しかしながら、ポリゴン・ガルバノミラー等の部材を用いる機械的な走査が用いられてもよい。また、ダイクロイックキューブ等を用いて波長特性によって色成分光を合成してもよく、PBS(Polarization Beam Splitter)等を用いて偏光特性によって色成分を合成してもよい。また、スキャン光源10の数は、4つに限定されるものではなく、5つ以上であってもよく、3つ以下であってもよい。
【符号の説明】
【0094】
10…スキャン光源、11…光源、12…コリメーションレンズ、13…ファイバー、14…ダイクロイックミラー、15…ダイクロイックミラー、16…スキャン光学素子、20…トロイダル反射ミラー、21…ミラー面、30…撮像装置、31…撮像素子、32…双曲面ミラー、100…表示システム、200…制御ユニット、210…取得部、220…制御部
【特許請求の範囲】
【請求項1】
互いに直交するX軸及びY軸によって定義される投写面に対して、前記X軸及び前記Y軸に直交するZ軸に沿って映像光を投写する表示システムであって、
前記Y軸に沿って前記映像光を出射するように構成されており、前記Z軸に沿って前記映像光を走査することによって、前記投写面上において前記映像光をスキャンするように構成されたスキャン光源と、
前記スキャン光源から出射された前記映像光を前記投写面に反射するように構成されており、前記Y軸に沿って延びる回転軸を中心として回転するように構成されたトロイダル反射ミラーとを備えており、
前記トロイダル反射ミラーは、前記Y軸の一方から見て円環形状を有しており、かつ、トロイダル形状を有するミラー面を有しており、
前記ミラー面は、前記Z軸に沿った前記映像光の走査に伴って、前記投写面上において前記映像光の照射位置を前記Y軸に沿って移動させる形状を有しており、かつ、前記トロイダル反射ミラーの回転に伴って、前記投写面上において前記映像光の照射位置を前記X軸に沿って移動させる形状を有することを特徴とする表示システム。
【請求項2】
前記ミラー面は、複数のサブミラー面によって構成されており、
前記複数のサブミラー面のそれぞれは、前記X軸方向の中心位置において、ねじれがない球面或いは非球面形状を有しており、前記X軸方向の中心位置以外において、前記X軸方向及び前記Y軸方向の双方に沿って曲率が変化するねじれ形状を有することを特徴とする請求項1に記載の表示システム。
【請求項3】
前記投写面を撮像する撮像装置と、
前記投写面の撮像画像に基づいて、前記スキャン光源を制御するように構成された制御部とをさらに備えることを特徴とする請求項1に記載の表示システム。
【請求項4】
前記投写面として、4つの投写面が設けられており、
前記映像光は、前記4つの投写面のそれぞれに投写される4つのサブ映像光によって構成されており、
前記スキャン光源は、前記4つのサブ映像光のそれぞれを出射する4つのサブスキャン光源によって構成されており、
前記ミラー面は、前記4つのサブ映像光のそれぞれを前記4つの投写面のそれぞれに反射する4つのサブミラー面によって構成されることを特徴とする請求項1に記載の表示システム。
【請求項5】
前記Y軸は、鉛直方向に延びる軸であり、
前記スキャン光源は、下方向に前記映像光を出射し、
前記スキャン光源は、前記撮像装置の上側に配置されることを特徴とする請求項2に記載の表示システム。
【請求項1】
互いに直交するX軸及びY軸によって定義される投写面に対して、前記X軸及び前記Y軸に直交するZ軸に沿って映像光を投写する表示システムであって、
前記Y軸に沿って前記映像光を出射するように構成されており、前記Z軸に沿って前記映像光を走査することによって、前記投写面上において前記映像光をスキャンするように構成されたスキャン光源と、
前記スキャン光源から出射された前記映像光を前記投写面に反射するように構成されており、前記Y軸に沿って延びる回転軸を中心として回転するように構成されたトロイダル反射ミラーとを備えており、
前記トロイダル反射ミラーは、前記Y軸の一方から見て円環形状を有しており、かつ、トロイダル形状を有するミラー面を有しており、
前記ミラー面は、前記Z軸に沿った前記映像光の走査に伴って、前記投写面上において前記映像光の照射位置を前記Y軸に沿って移動させる形状を有しており、かつ、前記トロイダル反射ミラーの回転に伴って、前記投写面上において前記映像光の照射位置を前記X軸に沿って移動させる形状を有することを特徴とする表示システム。
【請求項2】
前記ミラー面は、複数のサブミラー面によって構成されており、
前記複数のサブミラー面のそれぞれは、前記X軸方向の中心位置において、ねじれがない球面或いは非球面形状を有しており、前記X軸方向の中心位置以外において、前記X軸方向及び前記Y軸方向の双方に沿って曲率が変化するねじれ形状を有することを特徴とする請求項1に記載の表示システム。
【請求項3】
前記投写面を撮像する撮像装置と、
前記投写面の撮像画像に基づいて、前記スキャン光源を制御するように構成された制御部とをさらに備えることを特徴とする請求項1に記載の表示システム。
【請求項4】
前記投写面として、4つの投写面が設けられており、
前記映像光は、前記4つの投写面のそれぞれに投写される4つのサブ映像光によって構成されており、
前記スキャン光源は、前記4つのサブ映像光のそれぞれを出射する4つのサブスキャン光源によって構成されており、
前記ミラー面は、前記4つのサブ映像光のそれぞれを前記4つの投写面のそれぞれに反射する4つのサブミラー面によって構成されることを特徴とする請求項1に記載の表示システム。
【請求項5】
前記Y軸は、鉛直方向に延びる軸であり、
前記スキャン光源は、下方向に前記映像光を出射し、
前記スキャン光源は、前記撮像装置の上側に配置されることを特徴とする請求項2に記載の表示システム。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【公開番号】特開2012−208390(P2012−208390A)
【公開日】平成24年10月25日(2012.10.25)
【国際特許分類】
【出願番号】特願2011−75074(P2011−75074)
【出願日】平成23年3月30日(2011.3.30)
【出願人】(000001889)三洋電機株式会社 (18,308)
【Fターム(参考)】
【公開日】平成24年10月25日(2012.10.25)
【国際特許分類】
【出願日】平成23年3月30日(2011.3.30)
【出願人】(000001889)三洋電機株式会社 (18,308)
【Fターム(参考)】
[ Back to top ]