
表示制御装置、表示制御方法、プログラム、および記録媒体
【課題】撮像された画像の撮像領域に存在する交通標識の意味およびその位置を、容易かつ直感的に把握させること。
【解決手段】取得部106は、撮像部104によって撮像された画像を取得する。認識部108は、取得部106が取得した画像における第一国の交通標識を認識する。制御部110は、認識部108によって認識された第一国の交通標識に対応付けられている、第二国の交通標識の画像を格納部102から抽出し、抽出した第二国の交通標識の画像を、取得部106が取得した画像上に表示するように、表示部112による表示を制御する。
【解決手段】取得部106は、撮像部104によって撮像された画像を取得する。認識部108は、取得部106が取得した画像における第一国の交通標識を認識する。制御部110は、認識部108によって認識された第一国の交通標識に対応付けられている、第二国の交通標識の画像を格納部102から抽出し、抽出した第二国の交通標識の画像を、取得部106が取得した画像上に表示するように、表示部112による表示を制御する。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、表示部による画像の表示を制御する表示制御装置、表示制御方法、プログラム、および記録媒体に関する。ただし、この発明の利用は、上述した表示制御装置、表示制御方法、プログラム、および記録媒体には限られない。
【背景技術】
【0002】
カメラによって撮像された画像から道路標識を認識し、認識した道路標識に対応付けられている母国の道路標識の画像を表示装置で表示する技術が考案されている(たとえば、下記特許文献1参照。)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2009−109404号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、従来技術では、ユーザーに対し、画像から認識した道路標識の意味を認識させることができたとしても、その道路標識が示されている位置までは把握させることができない。
【課題を解決するための手段】
【0005】
上述した課題を解決し、目的を達成するため、請求項1の発明にかかる表示制御装置は、撮像部によって撮像された画像を取得する取得部と、前記取得部が取得した画像における第一国の交通標識を認識する認識部と、認識された第一国の交通標識に対応付けられている、第二国の交通標識の画像を格納部から抽出し、抽出した第二国の交通標識の画像を、前記取得部が取得した画像上において、前記第一国の交通標識と対応付けて表示するように、表示部による表示を制御する制御部と、を備えることを特徴とする。
【0006】
また、請求項6の発明にかかる表示制御方法は、撮像部によって撮像された画像を取得する取得工程と、前記取得工程で取得された画像における第一国の交通標識を認識する認識工程と、認識された第一国の交通標識に対応付けられている、第二国の交通標識の画像を格納部から抽出し、抽出した第二国の交通標識の画像を、前記取得工程で取得された画像上に表示するように、表示部による表示を制御する制御工程と、を含んだことを特徴とする。
【0007】
また、請求項7の発明にかかるプログラムは、請求項6に記載の表示制御方法をコンピュータに実行させることを特徴とする。
【0008】
また、請求項8の発明にかかる記録媒体は、請求項7に記載のプログラムをコンピュータで読み取り可能に記録したことを特徴とする。
【図面の簡単な説明】
【0009】
【図1】表示制御装置100の機能的構成を示すブロック図である。
【図2】表示制御装置100による表示制御処理の手順を示すフローチャートである。
【図3】ナビゲーション装置300のハードウエア構成を示すブロック図である。
【図4】ナビゲーション装置300による表示制御処理の手順を示すフローチャートである。
【図5】ナビゲーション装置300によって撮像された画像の一例を示す説明図である。
【図6】ナビゲーション装置300による第二国の交通標識の表示例を示す説明図である。
【図7】ナビゲーション装置300による第二国の交通標識の表示例を示す説明図である。
【図8】ナビゲーション装置300による第二国の交通標識の他の表示例を示す説明図である。
【図9】ナビゲーション装置300による、第二国の交通標識の画像を表示するか否かの判断方法の一例を示す説明図である。
【発明を実施するための形態】
【0010】
以下に添付図面を参照して、この発明にかかる表示制御装置、表示制御方法、プログラム、および記録媒体の好適な実施の形態を詳細に説明する。
【0011】
(実施の形態)
(表示制御装置100の機能的構成)
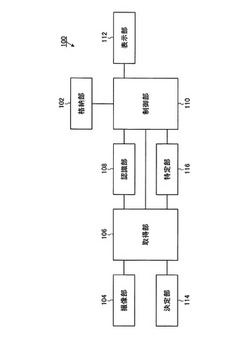
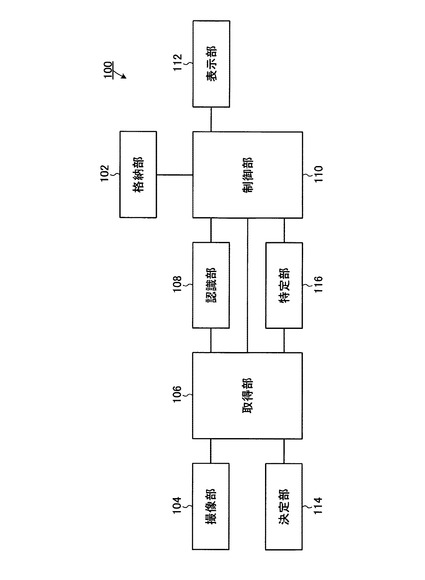
まず、本実施の形態にかかる表示制御装置100の機能的構成について説明する。図1は、表示制御装置100の機能的構成を示すブロック図である。図1において、表示制御装置100は、格納部102、撮像部104、取得部106、認識部108、制御部110、表示部112、決定部114、特定部116を備えて構成されている。
【0012】
格納部102は、第一国の交通標識に対応付けて、第二国の交通標識の画像を格納する。具体的には、格納部102には、第一国の交通標識が複数格納されている。そして、格納部102には、複数の第一国の交通標識のそれぞれに対して、これと同じ意味を示す第二国の交通標識の画像が、対応付けて格納されている。ここで、第一国とは、表示制御装置100が認識すべき交通標識の国を示す。たとえば、第一国は、表示制御装置100が使用される国である。一方、第二国とは、第一国とは異なる国であって、表示部112に表示させるべき交通標識の国を示す。たとえば、第二国は、表示制御装置100を使用するユーザーの母国である。第一国および第二国は、予め決定されていてもよく、予め用意されている複数の国の中から、ユーザーがそれぞれを選択的に決定してもよい。
【0013】
撮像部104は、撮像対象の画像を撮像する。たとえば、表示制御装置100が四輪車、二輪車、自転車などの車両に搭載されている場合、撮像部104は、車両の進行方向の画像を撮像する。他の例として、表示制御装置100をユーザーが保持している場合、撮像部104は、ユーザーの進行方向の画像を撮像する。撮像部104は、静止画像を撮像するものであってもよく、動画像を撮像するものであってもよい。取得部106は、撮像部104によって撮像された画像を取得する。本実施の形態では、撮像部104は、表示制御装置100に設けられている。これに限らず、撮像部104は、表示制御装置100の外部に設けられていてもよい。この場合、取得部106は、表示制御装置100の外部に設けられている撮像部104から、無線通信、有線通信、または記録媒体を介して、画像を取得してもよい。
【0014】
認識部108は、取得部106が取得した画像における第一国の交通標識を認識する。たとえば、認識部108は、取得部106が取得した画像に対して、既知のエッジ抽出処理、パターンマッチング処理などをおこなう。これにより、認識部108は、取得部106が取得した画像における第一国の交通標識を認識する。
【0015】
制御部110は、認識部108によって認識された第一国の交通標識に対応付けられている、第二国の交通標識の画像を格納部102から抽出する。そして、制御部110は、抽出した第二国の交通標識の画像を、取得部106が取得した画像上において、認識部108によって認識された第一国の交通標識と対応付けて表示するように、表示部112による表示を制御する。
【0016】
たとえば、制御部110は、取得部106が取得した画像における、第一国の交通標識の画像に重畳して、第二国の交通標識の画像を表示させる。他の例として、取得部106は、取得部106が取得した画像における、第一国の交通標識の画像に並べて、第二国の交通標識の画像を表示させる。これに限らず、制御部110は、第一国の交通標識の画像が表示されていた位置と、表示された第二国の交通標識の画像との対応付けが容易に認識できるような形態であれば、上記以外の形態で、画像および第二国の交通標識の画像を表示部112に表示させてもよい。
【0017】
本実施の形態では、格納部102は、表示制御装置100に設けられている。これに限らず、格納部102は、表示制御装置100の外部に設けられていてもよい。この場合、制御部110は、表示制御装置100の外部に設けられている格納部102から、無線通信、有線通信、または記録媒体を介して、第二国の交通標識の画像を抽出してもよい。
【0018】
また、本実施の形態では、表示部112は、表示制御装置100に設けられている。これに限らず、表示部112は、表示制御装置100の外部に設けられていてもよい。この場合、制御部110は、表示制御装置100の外部に設けられている表示部112に対し、無線通信または有線通信を介して、画像および第二国の交通標識の画像を表示させてもよい。
【0019】
決定部114は、目的地までの経路を決定する。たとえば、決定部114は、表示制御装置100が有する経路探索機能を利用して、目的地までの走行経路を探索することによって、目的地までの経路を決定する。他の例として、決定部114は、目的地までの経路が示された走行経路情報を、表示制御装置100の内部または外部から取得することによって、目的地までの経路を決定してもよい。
【0020】
取得部106は、決定部114によって決定された経路に関する経路情報をさらに取得してもよい。この場合、制御部110は、取得部106が取得した経路情報に基づいて、取得部106が取得した画像における第一国の交通標識のうち、経路上にないものについては、この第一国の交通標識に対応付けられている第二国の交通標識の画像を表示しないように、表示部112による表示を制御してもよい。
【0021】
特定部116は、取得部106が取得した画像の撮像領域内に存在する第一国の交通標識およびその位置を特定する。たとえば、表示制御装置100内部または外部のデータベースに対し、第一国の交通標識ごとにその位置情報を対応付けて格納しておく。特定部116は、表示制御装置100の現在位置、撮像部104の撮像方向、および撮像部104の画角などに基づいて、取得部106が取得した画像の撮像領域を特定する。
【0022】
そして、特定部116は、上記データベースを参照することにより、撮像領域内に存在する第一国の交通標識およびその位置を特定する。制御部110は、特定部116によって特定された第一国の交通標識に対応付けられている第二国の交通標識の画像を格納部102から抽出し、抽出した第二国の交通標識の画像を、取得部106が取得した画像上において、特定部116によって特定された位置に対応させて表示するように、表示部112による表示を制御してもよい。
【0023】
(表示制御装置100による表示制御処理の手順)
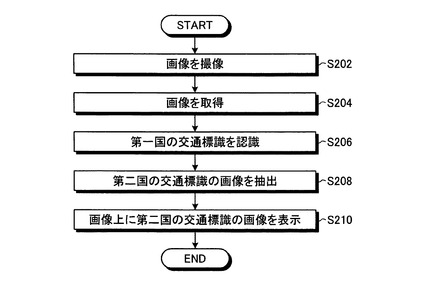
つぎに、表示制御装置100による表示制御処理の手順について説明する。図2は、本実施の形態にかかる表示制御装置100による表示制御処理の手順を示すフローチャートである。
【0024】
まず、撮像部104が、画像を撮像する(ステップS202)。つぎに、取得部106が、ステップS202で撮像された画像を取得する(ステップS204)。つぎに、認識部108が、ステップS204で取得された画像における第一国の交通標識を認識する(ステップS206)。そして、制御部110が、ステップS206で認識された第一国の交通標識に対応付けられている、第二国の交通標識の画像を格納部102から抽出する(ステップS208)。さらに、制御部110が、ステップS208で抽出した第二国の交通標識の画像を、ステップS202で撮像された画像上において、ステップS206で認識された第一国の交通標識と対応付けて表示するように、表示部112による表示を制御し(ステップS210)、表示制御装置100は、一連の表示制御処理を終了する。
【0025】
以上説明したように、本実施の形態にかかる表示制御装置100は、撮像部104によって撮像された画像において第一国の交通標識を認識し、これに対応付けられている第二国の交通標識の画像を、撮像部104によって撮像された画像上において、認識された第一国の交通標識に対応付けて表示する構成とした。これにより、表示制御装置100は、ユーザーに対し、撮像部104が撮像した画像の撮像領域内に存在する交通標識の意味だけでなく、その交通標識が示されている位置までも、容易かつ直感的に把握させることができる。
【実施例】
【0026】
以下に添付図面を参照して、この発明にかかる表示制御装置、表示制御方法、プログラム、および記録媒体の好適な実施例を詳細に説明する。本実施例では、四輪車、二輪車、自転車などの車両に搭載され、またはユーザーに保持され、現在位置検出処理、経路探索処理、経路誘導処理などの各種処理をおこなうナビゲーション装置300によって、本発明にかかる表示制御装置、表示制御方法、プログラム、および記録媒体を実施した場合について説明する。
【0027】
(ナビゲーション装置300のハードウエア構成)
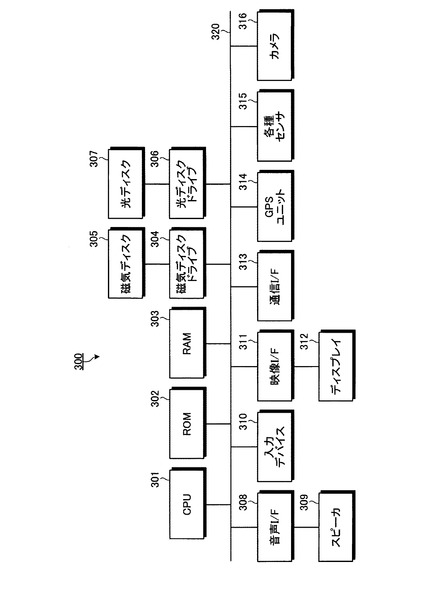
まず、ナビゲーション装置300のハードウエア構成について説明する。図3は、ナビゲーション装置300のハードウエア構成を示すブロック図である。
【0028】
図3において、ナビゲーション装置300は、CPU301、ROM302、RAM303、磁気ディスクドライブ304、磁気ディスク305、光ディスクドライブ306、光ディスク307、音声I/F(インターフェース)308、スピーカ309、入力デバイス310、映像I/F311、ディスプレイ312、通信I/F313、GPSユニット314、各種センサ315、およびカメラ316を備えている。これら各構成部301〜316はバス320によってそれぞれ接続されている。
【0029】
CPU301は、ナビゲーション装置300の全体の制御を司る。ROM302は、ナビゲーション装置300が備える各種機能を実現するためのブートプログラム、OS(Operating System)プログラム、ナビゲーションプログラムなどの各種プログラムを記録している。RAM303は、CPU301のワークエリアとして使用される。
【0030】
CPU301は、ROM302、磁気ディスク305、光ディスク307などに記録されているナビゲーションプログラムを実行することにより、現在位置検出処理、経路探索処理、経路誘導処理などの各種処理をおこなう。たとえば、CPU301は、GPSユニット314および各種センサ315の出力情報に基づいて、車両の現在位置(ナビゲーション装置300の現在位置)を検出する。また、CPU301は、ナビゲーションプログラムに含まれた地図データなどを利用して、出発地から目的地までの走行経路を探索する。また、CPU301は、探索した走行経路を示す経路情報や、探索した走行経路を案内する案内情報などを、映像I/F311を介してディスプレイ312に表示させる。また、CPU301は、探索された走行経路を案内する案内情報などを、音声I/F308を介してスピーカ309から音声出力させる。
【0031】
磁気ディスクドライブ304は、CPU301の制御にしたがって磁気ディスク305に対するデータの読み取り/書き込みを制御する。磁気ディスク305は、磁気ディスクドライブ304の制御で書き込まれたデータを記録する。磁気ディスク305としては、たとえば、HD(ハードディスク)やFD(フレキシブルディスク)を用いることができる。
【0032】
光ディスクドライブ306は、CPU301の制御にしたがって光ディスク307に対するデータの読み取り/書き込みを制御する。光ディスク307は、光ディスクドライブ306の制御にしたがってデータが読み出される着脱自在な記録媒体である。光ディスク307は、書き込み可能な記録媒体を利用することもできる。また、この着脱自在な記録媒体として、光ディスク307のほか、MO、メモリカードなどであってもよい。
【0033】
音声I/F308は、音声出力用のスピーカ309に接続される。スピーカ309は、音声を出力する。入力デバイス310は、文字、数値、各種指示などの入力のための複数のキーを備えたリモコン、キーボード、マウス、タッチパネルなどが挙げられる。入力デバイス310は、リモコン、キーボード、マウス、タッチパネルのうち、いずれか一つの形態によって実現してもよいし、複数の形態によって実現してもよい。
【0034】
映像I/F311は、ディスプレイ312に接続される。映像I/F311は、具体的には、たとえば、ディスプレイ312全体の制御をおこなうグラフィックコントローラと、即時表示可能な画像情報を一時的に記録するVRAM(Video RAM)などのバッファメモリと、グラフィックコントローラから出力される画像データに基づいてディスプレイ312を制御する制御ICなどによって構成される。
【0035】
ディスプレイ312は、たとえば、液晶ディスプレイ、有機ELディスプレイなどを採用することができる。ディスプレイ312は、たとえば、車両のダッシュボード付近に設置される。ディスプレイ312は、車両のダッシュボード付近のほか、車両の後部座席周辺などに設置するなどして、車両内に複数設置してもよい。
【0036】
通信I/F313は、外部(通信ネットワーク、情報処理装置、記録媒体など)と有線または無線によって接続され、接続された外部に対するデータの入出力を制御する。たとえば、カメラ316またはディスプレイ312が外部に設けられている場合、通信I/F313は、外部のカメラ316またはディスプレイ312と接続され、接続された外部のカメラ316またはディスプレイ312に対するデータの入出力を制御する。
【0037】
GPSユニット314は、GPS衛星からの電波を受信し、車両の現在位置を示す情報を出力する。GPSユニット314の出力情報は、後述する各種センサ315の出力値とともに、CPU301による車両の現在位置の算出に際して利用される。現在位置を示す情報は、たとえば緯度・経度、高度などの、地図データ上の1点を特定する情報である。
【0038】
各種センサ315は、車速センサ、加速度センサ、角速度センサなどの、車両の位置や挙動を判断することが可能な情報を出力する。各種センサ315の出力値は、CPU301による車両の現在位置の算出や、速度や方位の変化量の測定などに用いられる。
【0039】
カメラ316は、撮像対象の画像を撮像する。カメラ316は、CCD、CMOSなどの撮像素子によって撮像対象からの光を受光し、受光した光から撮像対象の画像データを生成する。
【0040】
本実施例のナビゲーション装置300は、ROM302、磁気ディスク305、光ディスク307などの記録媒体によって、図1に示した格納部102の機能を実現することができる。また、本実施例のナビゲーション装置300は、カメラ316によって、図1に示した撮像部104の機能を実現することができる。また、本実施例のナビゲーション装置300は、ROM302、磁気ディスク305、光ディスク307などに記録されている充電制御プログラムをCPU301が実行することによって、図1に示した取得部106、認識部108、および制御部110の機能を実現することができる。また、本実施例のナビゲーション装置300は、ディスプレイ312によって、図1に示した表示部112の機能を実現することができる。
【0041】
(ナビゲーション装置300による表示制御処理の手順)
つぎに、ナビゲーション装置300による表示制御処理の手順について説明する。図4は、ナビゲーション装置300による表示制御処理の手順を示すフローチャートである。
【0042】
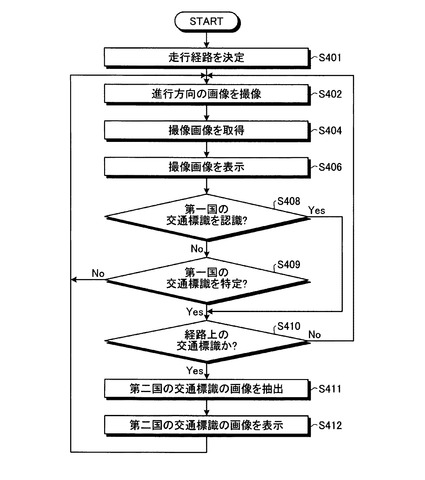
まず、ナビゲーション装置300は、目的地までの車両の走行経路を決定する(ステップS401)。たとえば、ナビゲーション装置300は、地図情報、ユーザによって入力された出発地、経由地、目的地、各種条件(たとえば、時間優先/距離優先、一般道路優先/高速道路優先、など)に基づいて、目的地までの車両の走行経路を探索する。
【0043】
つぎに、ナビゲーション装置300は、車両の進行方向の画像を撮像する(ステップS402)。つぎに、ナビゲーション装置300は、ステップS402で撮像された画像を取得する(ステップS404)。つぎに、ナビゲーション装置300は、ステップS404で取得された画像を表示する(ステップS406)。
【0044】
つぎに、ナビゲーション装置300は、ステップS404で取得された画像から第一国の交通標識を認識する(ステップS408)。ステップS408において、第一国の交通標識を認識した場合(ステップS408:Yes)、ステップS408で認識された第一国の交通標識が、ステップS401で決定された走行経路上のものか否かを判断する(ステップS410)。
【0045】
ステップS410において、走行経路上のものであると判断した場合(ステップS410:Yes)、ナビゲーション装置300は、ステップS408で認識された第一国の交通標識に対応付けられている第二国の交通標識の画像を抽出する(ステップS411)。そして、ナビゲーション装置300は、ステップS411で抽出された第二国の交通標識の画像を、ステップS406で表示された画像上において、ステップS408で認識された第一国の交通標識に対応付けて表示して(ステップS412)、ステップS402へ処理を戻す。
【0046】
一方、ステップS408において、第一国の交通標識を認識しない場合(ステップS408:No)、ナビゲーション装置300は、ステップS409へ処理を進める。
【0047】
ステップS409では、ナビゲーション装置300は、取得部106が取得した画像の撮像領域内に存在する第一国の交通標識およびその位置を特定できるか否かを判断する(ステップS409)。これは、カメラ316の撮像領域内に第一国の交通標識が存在するにもかかわらず前方車両や街路樹などの障害物に遮られてその交通標識が認識できない場合が考えられるからである。そのため、ナビゲーション装置300は、第一国の交通標識ごとの位置情報および高さ情報のデータベースを磁気ディスク305などに格納しておき、カメラ316で撮像した画像から第一国の交通標識を認識しない場合に、当該データベースを参照して、カメラ316の撮像領域内に第一国の交通標識が存在するか否か判断する。なお、GPSユニット314や各種センサ315の測位精度によっては、実際の車両の位置とナビゲーション装置300が認識する位置とに誤差が生じる可能性があるので、画像から交通標識が認識できない場合のみデータベースを参照している。
【0048】
ステップS409において、第一国の交通標識を特定した場合(ステップS409:Yes)、ナビゲーション装置300は、ステップS409で特定された第一国の交通標識が、ステップS401で決定された走行経路上のものか否かを判断する(ステップS410)。そして、ステップS410において、走行経路上のものであると判断した場合(ステップS410:Yes)、特定された第一国の交通標識に対応付けられている第二国の交通標識の画像を抽出する(ステップS411)。そして、ナビゲーション装置300は、ステップS411で抽出された第二国の交通標識の画像を表示して(ステップS412)、ステップS402へ処理を戻す。なお、ステップS412において、第二国の標識を画像上のどこに表示するかについては後述する。
【0049】
一方、ステップS409において、第一国の交通標識を特定できない場合(ステップS409:No)、すなわち、カメラ316の撮像領域内に第一国の交通標識が存在しないと判断した場合、および、ステップS410において、走行経路上の交通標識でないと判断した場合(ステップS410:No)、ナビゲーション装置300は、ステップS402へ処理を戻す。
【0050】
たとえば、ナビゲーション装置300は、車両が目的地に到着するまでの間、車両の進行方向の画像を連続して撮像する。そして、ナビゲーション装置300は、撮像した画像毎に、ステップS402からステップS412までの処理をおこなう。これにより、ナビゲーション装置300は、車両が目的地に到着するまでの間、常に最新の車両の進行方向の画像を表示することができるうえ、撮像された画像の撮像領域に存在する第一国の交通標識に対応付けて、第二国の交通標識の画像を撮像された画像上に表示することができる。
【0051】
(ナビゲーション装置300による第二国の交通標識の表示例)
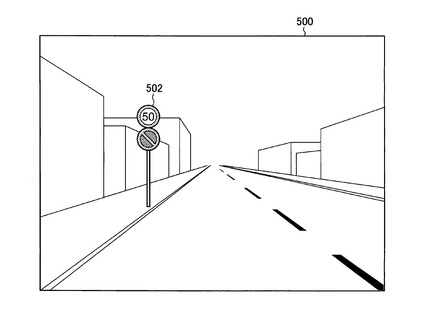
つぎに、ナビゲーション装置300による第二国の交通標識の表示例について説明する。図5は、ナビゲーション装置300によって撮像された画像の一例を示す説明図である。図5に示す画像500は、ナビゲーション装置300によって撮像された、車両の進行方向の画像である。画像500には、第一国の交通標識の画像502が含まれている。このような画像500が撮像された場合、ナビゲーション装置300は、画像500から、第一国の交通標識を認識し、認識した第一国の交通標識に対応付けられている第二国の交通標識の画像を、画像500上に表示する。
【0052】
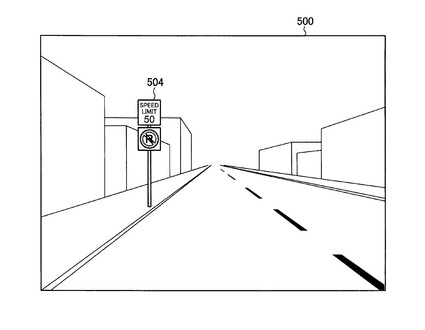
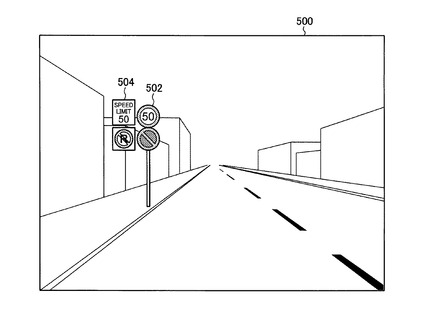
図6および図7は、ナビゲーション装置300による第二国の交通標識の表示例を示す説明図である。図6に示す例では、画像500には、第二国の交通標識の画像である画像504が、画像500上において、第一国の交通標識の画像502に重畳されて表示されている。一方、図7に示す例では、画像500には、第二国の交通標識の画像504が、画像500上において、第一国の交通標識の画像502に並べて表示されている。このように、ナビゲーション装置300は、第一国の交通標識の画像に置き換えて第二国の交通標識の画像を表示してもよく、第一国の交通標識の画像と第二国の交通標識の画像とを並べて同時に表示してもよく、一方を点滅させてもよく、交互に表示してもよい。
【0053】
(ナビゲーション装置300による第二国の交通標識の他の表示例)
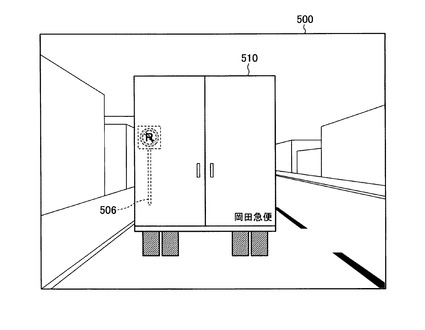
つぎに、ナビゲーション装置300による第二国の交通標識の他の表示例について説明する。図8は、ナビゲーション装置300による第二国の交通標識の他の表示例を示す説明図である。図8に示す例では、画像500には、第二国の交通標識の画像である画像506が、画像500上に表示されている。ここで、画像506が表示されている位置は、画像506の元となる第一国の交通標識が設置されている位置である。画像500の撮像領域には、障害物510が存在しているため、画像500には、この第一国の交通標識が写し出されていない。このため、ナビゲーション装置300は、画像500からこの第一国の交通標識を認識することができない。
【0054】
しかしながら、ナビゲーション装置300は、画像500の撮像範囲を特定して、磁気ディスク305などに格納されている第一国の交通標識ごとの位置情報および高さ情報のデータベースを参照することで、特定した撮像範囲に存在する第一国の交通標識およびその位置と高さを特定することができる。そして、ナビゲーション装置300は、特定した第一国の交通標識に対応付けられている第二国の交通標識の画像を抽出し、第一国の交通標識をカメラ316で撮像すれば投影されるはずの画像500上の位置に対応させて表示することができる。なお、上記のデータベースに第一国の交通標識ごとの位置情報しかない場合、ナビゲーション装置300は、第一国の交通標識が地表面に存在するとして、それをカメラ316で撮像すれば投影されるはずの画像500上の位置に対応する第二国の交通標識の画像を表示してもよい。このようにして、ナビゲーション装置300は、図8に示す例のように、画像500には第一国の交通標識が写し出されなかった場合でも、この第一国の交通標識に対応付けられている第二国の交通標識の画像を、画像500上に表示することができる。
【0055】
ここで、ナビゲーション装置300は、画像506を、透過させて表示することが好ましい。これにより、ユーザーは、交通標識および障害物の双方を、容易かつ直感的に把握することができる。
【0056】
(第二国の交通標識の画像を表示するか否かの判断方法の一例)
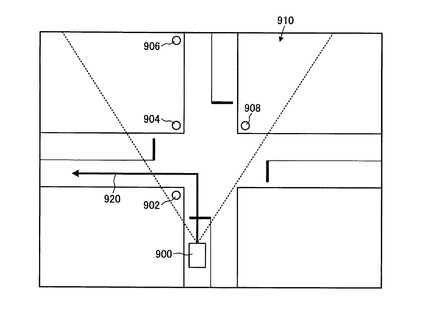
つぎに、ナビゲーション装置300による、第二国の交通標識の画像を表示するか否かの判断方法の一例について説明する。図9は、ナビゲーション装置300による、第二国の交通標識の画像を表示するか否かの判断方法の一例を示す説明図である。
【0057】
図9は、ナビゲーション装置300の周辺の地図を模式的に示したものである。図9において、車両900は、ナビゲーション装置300を搭載している車両を示す。また、領域910は、ナビゲーション装置300による撮像領域を示す。また、経路920は、車両900の目的地までの経路を示す。
【0058】
ここで、領域910内には、第一国の交通標識902、904、906、および908が存在する。ここで、ナビゲーション装置300は、車両900にとって必要な交通標識のみを対象として、当該交通標識に対応付けられている第二国の交通標識の画像を、ナビゲーション装置300が撮像した画像上に表示してもよい。たとえば、車両900の経路920上に存在する交通標識のみを対象として、当該交通標識に対応付けられている第二国の交通標識の画像を、ナビゲーション装置300が撮像した画像上に表示してもよい。図9に示す例では、交差点を左折する経路920上に存在するのは、第一国の交通標識902のみである。この場合、ナビゲーション装置300は、経路920上に存在する第一国の交通標識902のみを対象として、当該第一国の交通標識902に対応付けられている第二国の交通標識の画像を、ナビゲーション装置300が撮像した画像上に表示してもよい。仮に車両900の経路が交差点を直進するものであれば、この経路上に存在する第一国の交通標識902,904,906,908のそれぞれを対象として、当該第一国の交通標識902,904,906,908に対応付けられている第二国の交通標識の画像を、ナビゲーション装置300が撮像した画像上に表示してもよい。
【0059】
以上説明したように、本実施例にかかるナビゲーション装置300は、撮像した画像において第一国の交通標識を認識し、これに対応付けられている第二国の交通標識の画像を、撮像した画像上において、認識された第一国の交通標識と対応付けて表示する構成とした。これにより、ナビゲーション装置300は、ユーザーに対し、撮像した画像の撮像領域内に存在する交通標識の意味だけでなく、その交通標識が示されている位置までも、容易かつ直感的に把握させることができる。
【0060】
特に、本実施例にかかるナビゲーション装置300は、撮像した画像に写し出されている第一国の交通標識の画像に置き換えて、または並べて、第二国の交通標識の画像を表示する構成とした。これにより、ナビゲーション装置300は、ユーザーに対し、撮像した画像の撮像領域内に存在する交通標識の位置を、より容易かつ直感的に把握させることができる。
【0061】
さらに、本実施例にかかるナビゲーション装置300は、撮像した画像の撮像領域内に存在する第一国の交通標識を特定し、特定した第一国の交通標識に対応付けられている第二国の交通標識の画像を、撮像した画像上における、特定した位置に対応させて表示する構成とした。これにより、ナビゲーション装置300は、障害物や撮影の不具合などにより、撮像した画像から第一国の交通標識を認識できなかった場合であっても、この第一国の交通標識に対応付けられている第二国の交通標識の画像を、適切な位置に表示することができる。このため、ユーザーに対し、撮像した画像の撮像領域内に存在する交通標識の意味およびその位置を、容易かつ直感的に把握させることができる。
【0062】
さらに、本実施例にかかるナビゲーション装置300は、撮像した画像の撮像領域内に存在する第一国の交通標識のうち、経路上にないものについては、この第一国の交通標識に対応付けられている第二国の交通標識の画像を表示しない構成とした。これにより、ナビゲーション装置300は、ユーザーに対し、撮像した画像の撮像領域内に存在する交通標識のうち、ユーザーにとって必要な交通標識を注視させ、この交通標識の意味および位置を、容易かつ直感的に把握させることができる。
【0063】
なお、本実施例で説明した表示制御方法は、予め用意されたプログラムをコンピュータで実行することにより実現することができる。このプログラムは、ハードディスク、フレキシブルディスク、CD−ROM、MO、DVDなどのコンピュータで読み取り可能な記録媒体に記録され、コンピュータによって記録媒体から読み出されることによって実行される。また、このプログラムは、インターネットなどのネットワークを介して配布することが可能な伝送媒体であってもよい。
【符号の説明】
【0064】
100 表示制御装置
102 格納部
104 撮像部
106 取得部
108 認識部
110 制御部
112 表示部
114 決定部
116 特定部
300 ナビゲーション装置
500 画像
502 第一国の交通標識の画像
504 第二国の交通標識の画像
【技術分野】
【0001】
この発明は、表示部による画像の表示を制御する表示制御装置、表示制御方法、プログラム、および記録媒体に関する。ただし、この発明の利用は、上述した表示制御装置、表示制御方法、プログラム、および記録媒体には限られない。
【背景技術】
【0002】
カメラによって撮像された画像から道路標識を認識し、認識した道路標識に対応付けられている母国の道路標識の画像を表示装置で表示する技術が考案されている(たとえば、下記特許文献1参照。)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2009−109404号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、従来技術では、ユーザーに対し、画像から認識した道路標識の意味を認識させることができたとしても、その道路標識が示されている位置までは把握させることができない。
【課題を解決するための手段】
【0005】
上述した課題を解決し、目的を達成するため、請求項1の発明にかかる表示制御装置は、撮像部によって撮像された画像を取得する取得部と、前記取得部が取得した画像における第一国の交通標識を認識する認識部と、認識された第一国の交通標識に対応付けられている、第二国の交通標識の画像を格納部から抽出し、抽出した第二国の交通標識の画像を、前記取得部が取得した画像上において、前記第一国の交通標識と対応付けて表示するように、表示部による表示を制御する制御部と、を備えることを特徴とする。
【0006】
また、請求項6の発明にかかる表示制御方法は、撮像部によって撮像された画像を取得する取得工程と、前記取得工程で取得された画像における第一国の交通標識を認識する認識工程と、認識された第一国の交通標識に対応付けられている、第二国の交通標識の画像を格納部から抽出し、抽出した第二国の交通標識の画像を、前記取得工程で取得された画像上に表示するように、表示部による表示を制御する制御工程と、を含んだことを特徴とする。
【0007】
また、請求項7の発明にかかるプログラムは、請求項6に記載の表示制御方法をコンピュータに実行させることを特徴とする。
【0008】
また、請求項8の発明にかかる記録媒体は、請求項7に記載のプログラムをコンピュータで読み取り可能に記録したことを特徴とする。
【図面の簡単な説明】
【0009】
【図1】表示制御装置100の機能的構成を示すブロック図である。
【図2】表示制御装置100による表示制御処理の手順を示すフローチャートである。
【図3】ナビゲーション装置300のハードウエア構成を示すブロック図である。
【図4】ナビゲーション装置300による表示制御処理の手順を示すフローチャートである。
【図5】ナビゲーション装置300によって撮像された画像の一例を示す説明図である。
【図6】ナビゲーション装置300による第二国の交通標識の表示例を示す説明図である。
【図7】ナビゲーション装置300による第二国の交通標識の表示例を示す説明図である。
【図8】ナビゲーション装置300による第二国の交通標識の他の表示例を示す説明図である。
【図9】ナビゲーション装置300による、第二国の交通標識の画像を表示するか否かの判断方法の一例を示す説明図である。
【発明を実施するための形態】
【0010】
以下に添付図面を参照して、この発明にかかる表示制御装置、表示制御方法、プログラム、および記録媒体の好適な実施の形態を詳細に説明する。
【0011】
(実施の形態)
(表示制御装置100の機能的構成)
まず、本実施の形態にかかる表示制御装置100の機能的構成について説明する。図1は、表示制御装置100の機能的構成を示すブロック図である。図1において、表示制御装置100は、格納部102、撮像部104、取得部106、認識部108、制御部110、表示部112、決定部114、特定部116を備えて構成されている。
【0012】
格納部102は、第一国の交通標識に対応付けて、第二国の交通標識の画像を格納する。具体的には、格納部102には、第一国の交通標識が複数格納されている。そして、格納部102には、複数の第一国の交通標識のそれぞれに対して、これと同じ意味を示す第二国の交通標識の画像が、対応付けて格納されている。ここで、第一国とは、表示制御装置100が認識すべき交通標識の国を示す。たとえば、第一国は、表示制御装置100が使用される国である。一方、第二国とは、第一国とは異なる国であって、表示部112に表示させるべき交通標識の国を示す。たとえば、第二国は、表示制御装置100を使用するユーザーの母国である。第一国および第二国は、予め決定されていてもよく、予め用意されている複数の国の中から、ユーザーがそれぞれを選択的に決定してもよい。
【0013】
撮像部104は、撮像対象の画像を撮像する。たとえば、表示制御装置100が四輪車、二輪車、自転車などの車両に搭載されている場合、撮像部104は、車両の進行方向の画像を撮像する。他の例として、表示制御装置100をユーザーが保持している場合、撮像部104は、ユーザーの進行方向の画像を撮像する。撮像部104は、静止画像を撮像するものであってもよく、動画像を撮像するものであってもよい。取得部106は、撮像部104によって撮像された画像を取得する。本実施の形態では、撮像部104は、表示制御装置100に設けられている。これに限らず、撮像部104は、表示制御装置100の外部に設けられていてもよい。この場合、取得部106は、表示制御装置100の外部に設けられている撮像部104から、無線通信、有線通信、または記録媒体を介して、画像を取得してもよい。
【0014】
認識部108は、取得部106が取得した画像における第一国の交通標識を認識する。たとえば、認識部108は、取得部106が取得した画像に対して、既知のエッジ抽出処理、パターンマッチング処理などをおこなう。これにより、認識部108は、取得部106が取得した画像における第一国の交通標識を認識する。
【0015】
制御部110は、認識部108によって認識された第一国の交通標識に対応付けられている、第二国の交通標識の画像を格納部102から抽出する。そして、制御部110は、抽出した第二国の交通標識の画像を、取得部106が取得した画像上において、認識部108によって認識された第一国の交通標識と対応付けて表示するように、表示部112による表示を制御する。
【0016】
たとえば、制御部110は、取得部106が取得した画像における、第一国の交通標識の画像に重畳して、第二国の交通標識の画像を表示させる。他の例として、取得部106は、取得部106が取得した画像における、第一国の交通標識の画像に並べて、第二国の交通標識の画像を表示させる。これに限らず、制御部110は、第一国の交通標識の画像が表示されていた位置と、表示された第二国の交通標識の画像との対応付けが容易に認識できるような形態であれば、上記以外の形態で、画像および第二国の交通標識の画像を表示部112に表示させてもよい。
【0017】
本実施の形態では、格納部102は、表示制御装置100に設けられている。これに限らず、格納部102は、表示制御装置100の外部に設けられていてもよい。この場合、制御部110は、表示制御装置100の外部に設けられている格納部102から、無線通信、有線通信、または記録媒体を介して、第二国の交通標識の画像を抽出してもよい。
【0018】
また、本実施の形態では、表示部112は、表示制御装置100に設けられている。これに限らず、表示部112は、表示制御装置100の外部に設けられていてもよい。この場合、制御部110は、表示制御装置100の外部に設けられている表示部112に対し、無線通信または有線通信を介して、画像および第二国の交通標識の画像を表示させてもよい。
【0019】
決定部114は、目的地までの経路を決定する。たとえば、決定部114は、表示制御装置100が有する経路探索機能を利用して、目的地までの走行経路を探索することによって、目的地までの経路を決定する。他の例として、決定部114は、目的地までの経路が示された走行経路情報を、表示制御装置100の内部または外部から取得することによって、目的地までの経路を決定してもよい。
【0020】
取得部106は、決定部114によって決定された経路に関する経路情報をさらに取得してもよい。この場合、制御部110は、取得部106が取得した経路情報に基づいて、取得部106が取得した画像における第一国の交通標識のうち、経路上にないものについては、この第一国の交通標識に対応付けられている第二国の交通標識の画像を表示しないように、表示部112による表示を制御してもよい。
【0021】
特定部116は、取得部106が取得した画像の撮像領域内に存在する第一国の交通標識およびその位置を特定する。たとえば、表示制御装置100内部または外部のデータベースに対し、第一国の交通標識ごとにその位置情報を対応付けて格納しておく。特定部116は、表示制御装置100の現在位置、撮像部104の撮像方向、および撮像部104の画角などに基づいて、取得部106が取得した画像の撮像領域を特定する。
【0022】
そして、特定部116は、上記データベースを参照することにより、撮像領域内に存在する第一国の交通標識およびその位置を特定する。制御部110は、特定部116によって特定された第一国の交通標識に対応付けられている第二国の交通標識の画像を格納部102から抽出し、抽出した第二国の交通標識の画像を、取得部106が取得した画像上において、特定部116によって特定された位置に対応させて表示するように、表示部112による表示を制御してもよい。
【0023】
(表示制御装置100による表示制御処理の手順)
つぎに、表示制御装置100による表示制御処理の手順について説明する。図2は、本実施の形態にかかる表示制御装置100による表示制御処理の手順を示すフローチャートである。
【0024】
まず、撮像部104が、画像を撮像する(ステップS202)。つぎに、取得部106が、ステップS202で撮像された画像を取得する(ステップS204)。つぎに、認識部108が、ステップS204で取得された画像における第一国の交通標識を認識する(ステップS206)。そして、制御部110が、ステップS206で認識された第一国の交通標識に対応付けられている、第二国の交通標識の画像を格納部102から抽出する(ステップS208)。さらに、制御部110が、ステップS208で抽出した第二国の交通標識の画像を、ステップS202で撮像された画像上において、ステップS206で認識された第一国の交通標識と対応付けて表示するように、表示部112による表示を制御し(ステップS210)、表示制御装置100は、一連の表示制御処理を終了する。
【0025】
以上説明したように、本実施の形態にかかる表示制御装置100は、撮像部104によって撮像された画像において第一国の交通標識を認識し、これに対応付けられている第二国の交通標識の画像を、撮像部104によって撮像された画像上において、認識された第一国の交通標識に対応付けて表示する構成とした。これにより、表示制御装置100は、ユーザーに対し、撮像部104が撮像した画像の撮像領域内に存在する交通標識の意味だけでなく、その交通標識が示されている位置までも、容易かつ直感的に把握させることができる。
【実施例】
【0026】
以下に添付図面を参照して、この発明にかかる表示制御装置、表示制御方法、プログラム、および記録媒体の好適な実施例を詳細に説明する。本実施例では、四輪車、二輪車、自転車などの車両に搭載され、またはユーザーに保持され、現在位置検出処理、経路探索処理、経路誘導処理などの各種処理をおこなうナビゲーション装置300によって、本発明にかかる表示制御装置、表示制御方法、プログラム、および記録媒体を実施した場合について説明する。
【0027】
(ナビゲーション装置300のハードウエア構成)
まず、ナビゲーション装置300のハードウエア構成について説明する。図3は、ナビゲーション装置300のハードウエア構成を示すブロック図である。
【0028】
図3において、ナビゲーション装置300は、CPU301、ROM302、RAM303、磁気ディスクドライブ304、磁気ディスク305、光ディスクドライブ306、光ディスク307、音声I/F(インターフェース)308、スピーカ309、入力デバイス310、映像I/F311、ディスプレイ312、通信I/F313、GPSユニット314、各種センサ315、およびカメラ316を備えている。これら各構成部301〜316はバス320によってそれぞれ接続されている。
【0029】
CPU301は、ナビゲーション装置300の全体の制御を司る。ROM302は、ナビゲーション装置300が備える各種機能を実現するためのブートプログラム、OS(Operating System)プログラム、ナビゲーションプログラムなどの各種プログラムを記録している。RAM303は、CPU301のワークエリアとして使用される。
【0030】
CPU301は、ROM302、磁気ディスク305、光ディスク307などに記録されているナビゲーションプログラムを実行することにより、現在位置検出処理、経路探索処理、経路誘導処理などの各種処理をおこなう。たとえば、CPU301は、GPSユニット314および各種センサ315の出力情報に基づいて、車両の現在位置(ナビゲーション装置300の現在位置)を検出する。また、CPU301は、ナビゲーションプログラムに含まれた地図データなどを利用して、出発地から目的地までの走行経路を探索する。また、CPU301は、探索した走行経路を示す経路情報や、探索した走行経路を案内する案内情報などを、映像I/F311を介してディスプレイ312に表示させる。また、CPU301は、探索された走行経路を案内する案内情報などを、音声I/F308を介してスピーカ309から音声出力させる。
【0031】
磁気ディスクドライブ304は、CPU301の制御にしたがって磁気ディスク305に対するデータの読み取り/書き込みを制御する。磁気ディスク305は、磁気ディスクドライブ304の制御で書き込まれたデータを記録する。磁気ディスク305としては、たとえば、HD(ハードディスク)やFD(フレキシブルディスク)を用いることができる。
【0032】
光ディスクドライブ306は、CPU301の制御にしたがって光ディスク307に対するデータの読み取り/書き込みを制御する。光ディスク307は、光ディスクドライブ306の制御にしたがってデータが読み出される着脱自在な記録媒体である。光ディスク307は、書き込み可能な記録媒体を利用することもできる。また、この着脱自在な記録媒体として、光ディスク307のほか、MO、メモリカードなどであってもよい。
【0033】
音声I/F308は、音声出力用のスピーカ309に接続される。スピーカ309は、音声を出力する。入力デバイス310は、文字、数値、各種指示などの入力のための複数のキーを備えたリモコン、キーボード、マウス、タッチパネルなどが挙げられる。入力デバイス310は、リモコン、キーボード、マウス、タッチパネルのうち、いずれか一つの形態によって実現してもよいし、複数の形態によって実現してもよい。
【0034】
映像I/F311は、ディスプレイ312に接続される。映像I/F311は、具体的には、たとえば、ディスプレイ312全体の制御をおこなうグラフィックコントローラと、即時表示可能な画像情報を一時的に記録するVRAM(Video RAM)などのバッファメモリと、グラフィックコントローラから出力される画像データに基づいてディスプレイ312を制御する制御ICなどによって構成される。
【0035】
ディスプレイ312は、たとえば、液晶ディスプレイ、有機ELディスプレイなどを採用することができる。ディスプレイ312は、たとえば、車両のダッシュボード付近に設置される。ディスプレイ312は、車両のダッシュボード付近のほか、車両の後部座席周辺などに設置するなどして、車両内に複数設置してもよい。
【0036】
通信I/F313は、外部(通信ネットワーク、情報処理装置、記録媒体など)と有線または無線によって接続され、接続された外部に対するデータの入出力を制御する。たとえば、カメラ316またはディスプレイ312が外部に設けられている場合、通信I/F313は、外部のカメラ316またはディスプレイ312と接続され、接続された外部のカメラ316またはディスプレイ312に対するデータの入出力を制御する。
【0037】
GPSユニット314は、GPS衛星からの電波を受信し、車両の現在位置を示す情報を出力する。GPSユニット314の出力情報は、後述する各種センサ315の出力値とともに、CPU301による車両の現在位置の算出に際して利用される。現在位置を示す情報は、たとえば緯度・経度、高度などの、地図データ上の1点を特定する情報である。
【0038】
各種センサ315は、車速センサ、加速度センサ、角速度センサなどの、車両の位置や挙動を判断することが可能な情報を出力する。各種センサ315の出力値は、CPU301による車両の現在位置の算出や、速度や方位の変化量の測定などに用いられる。
【0039】
カメラ316は、撮像対象の画像を撮像する。カメラ316は、CCD、CMOSなどの撮像素子によって撮像対象からの光を受光し、受光した光から撮像対象の画像データを生成する。
【0040】
本実施例のナビゲーション装置300は、ROM302、磁気ディスク305、光ディスク307などの記録媒体によって、図1に示した格納部102の機能を実現することができる。また、本実施例のナビゲーション装置300は、カメラ316によって、図1に示した撮像部104の機能を実現することができる。また、本実施例のナビゲーション装置300は、ROM302、磁気ディスク305、光ディスク307などに記録されている充電制御プログラムをCPU301が実行することによって、図1に示した取得部106、認識部108、および制御部110の機能を実現することができる。また、本実施例のナビゲーション装置300は、ディスプレイ312によって、図1に示した表示部112の機能を実現することができる。
【0041】
(ナビゲーション装置300による表示制御処理の手順)
つぎに、ナビゲーション装置300による表示制御処理の手順について説明する。図4は、ナビゲーション装置300による表示制御処理の手順を示すフローチャートである。
【0042】
まず、ナビゲーション装置300は、目的地までの車両の走行経路を決定する(ステップS401)。たとえば、ナビゲーション装置300は、地図情報、ユーザによって入力された出発地、経由地、目的地、各種条件(たとえば、時間優先/距離優先、一般道路優先/高速道路優先、など)に基づいて、目的地までの車両の走行経路を探索する。
【0043】
つぎに、ナビゲーション装置300は、車両の進行方向の画像を撮像する(ステップS402)。つぎに、ナビゲーション装置300は、ステップS402で撮像された画像を取得する(ステップS404)。つぎに、ナビゲーション装置300は、ステップS404で取得された画像を表示する(ステップS406)。
【0044】
つぎに、ナビゲーション装置300は、ステップS404で取得された画像から第一国の交通標識を認識する(ステップS408)。ステップS408において、第一国の交通標識を認識した場合(ステップS408:Yes)、ステップS408で認識された第一国の交通標識が、ステップS401で決定された走行経路上のものか否かを判断する(ステップS410)。
【0045】
ステップS410において、走行経路上のものであると判断した場合(ステップS410:Yes)、ナビゲーション装置300は、ステップS408で認識された第一国の交通標識に対応付けられている第二国の交通標識の画像を抽出する(ステップS411)。そして、ナビゲーション装置300は、ステップS411で抽出された第二国の交通標識の画像を、ステップS406で表示された画像上において、ステップS408で認識された第一国の交通標識に対応付けて表示して(ステップS412)、ステップS402へ処理を戻す。
【0046】
一方、ステップS408において、第一国の交通標識を認識しない場合(ステップS408:No)、ナビゲーション装置300は、ステップS409へ処理を進める。
【0047】
ステップS409では、ナビゲーション装置300は、取得部106が取得した画像の撮像領域内に存在する第一国の交通標識およびその位置を特定できるか否かを判断する(ステップS409)。これは、カメラ316の撮像領域内に第一国の交通標識が存在するにもかかわらず前方車両や街路樹などの障害物に遮られてその交通標識が認識できない場合が考えられるからである。そのため、ナビゲーション装置300は、第一国の交通標識ごとの位置情報および高さ情報のデータベースを磁気ディスク305などに格納しておき、カメラ316で撮像した画像から第一国の交通標識を認識しない場合に、当該データベースを参照して、カメラ316の撮像領域内に第一国の交通標識が存在するか否か判断する。なお、GPSユニット314や各種センサ315の測位精度によっては、実際の車両の位置とナビゲーション装置300が認識する位置とに誤差が生じる可能性があるので、画像から交通標識が認識できない場合のみデータベースを参照している。
【0048】
ステップS409において、第一国の交通標識を特定した場合(ステップS409:Yes)、ナビゲーション装置300は、ステップS409で特定された第一国の交通標識が、ステップS401で決定された走行経路上のものか否かを判断する(ステップS410)。そして、ステップS410において、走行経路上のものであると判断した場合(ステップS410:Yes)、特定された第一国の交通標識に対応付けられている第二国の交通標識の画像を抽出する(ステップS411)。そして、ナビゲーション装置300は、ステップS411で抽出された第二国の交通標識の画像を表示して(ステップS412)、ステップS402へ処理を戻す。なお、ステップS412において、第二国の標識を画像上のどこに表示するかについては後述する。
【0049】
一方、ステップS409において、第一国の交通標識を特定できない場合(ステップS409:No)、すなわち、カメラ316の撮像領域内に第一国の交通標識が存在しないと判断した場合、および、ステップS410において、走行経路上の交通標識でないと判断した場合(ステップS410:No)、ナビゲーション装置300は、ステップS402へ処理を戻す。
【0050】
たとえば、ナビゲーション装置300は、車両が目的地に到着するまでの間、車両の進行方向の画像を連続して撮像する。そして、ナビゲーション装置300は、撮像した画像毎に、ステップS402からステップS412までの処理をおこなう。これにより、ナビゲーション装置300は、車両が目的地に到着するまでの間、常に最新の車両の進行方向の画像を表示することができるうえ、撮像された画像の撮像領域に存在する第一国の交通標識に対応付けて、第二国の交通標識の画像を撮像された画像上に表示することができる。
【0051】
(ナビゲーション装置300による第二国の交通標識の表示例)
つぎに、ナビゲーション装置300による第二国の交通標識の表示例について説明する。図5は、ナビゲーション装置300によって撮像された画像の一例を示す説明図である。図5に示す画像500は、ナビゲーション装置300によって撮像された、車両の進行方向の画像である。画像500には、第一国の交通標識の画像502が含まれている。このような画像500が撮像された場合、ナビゲーション装置300は、画像500から、第一国の交通標識を認識し、認識した第一国の交通標識に対応付けられている第二国の交通標識の画像を、画像500上に表示する。
【0052】
図6および図7は、ナビゲーション装置300による第二国の交通標識の表示例を示す説明図である。図6に示す例では、画像500には、第二国の交通標識の画像である画像504が、画像500上において、第一国の交通標識の画像502に重畳されて表示されている。一方、図7に示す例では、画像500には、第二国の交通標識の画像504が、画像500上において、第一国の交通標識の画像502に並べて表示されている。このように、ナビゲーション装置300は、第一国の交通標識の画像に置き換えて第二国の交通標識の画像を表示してもよく、第一国の交通標識の画像と第二国の交通標識の画像とを並べて同時に表示してもよく、一方を点滅させてもよく、交互に表示してもよい。
【0053】
(ナビゲーション装置300による第二国の交通標識の他の表示例)
つぎに、ナビゲーション装置300による第二国の交通標識の他の表示例について説明する。図8は、ナビゲーション装置300による第二国の交通標識の他の表示例を示す説明図である。図8に示す例では、画像500には、第二国の交通標識の画像である画像506が、画像500上に表示されている。ここで、画像506が表示されている位置は、画像506の元となる第一国の交通標識が設置されている位置である。画像500の撮像領域には、障害物510が存在しているため、画像500には、この第一国の交通標識が写し出されていない。このため、ナビゲーション装置300は、画像500からこの第一国の交通標識を認識することができない。
【0054】
しかしながら、ナビゲーション装置300は、画像500の撮像範囲を特定して、磁気ディスク305などに格納されている第一国の交通標識ごとの位置情報および高さ情報のデータベースを参照することで、特定した撮像範囲に存在する第一国の交通標識およびその位置と高さを特定することができる。そして、ナビゲーション装置300は、特定した第一国の交通標識に対応付けられている第二国の交通標識の画像を抽出し、第一国の交通標識をカメラ316で撮像すれば投影されるはずの画像500上の位置に対応させて表示することができる。なお、上記のデータベースに第一国の交通標識ごとの位置情報しかない場合、ナビゲーション装置300は、第一国の交通標識が地表面に存在するとして、それをカメラ316で撮像すれば投影されるはずの画像500上の位置に対応する第二国の交通標識の画像を表示してもよい。このようにして、ナビゲーション装置300は、図8に示す例のように、画像500には第一国の交通標識が写し出されなかった場合でも、この第一国の交通標識に対応付けられている第二国の交通標識の画像を、画像500上に表示することができる。
【0055】
ここで、ナビゲーション装置300は、画像506を、透過させて表示することが好ましい。これにより、ユーザーは、交通標識および障害物の双方を、容易かつ直感的に把握することができる。
【0056】
(第二国の交通標識の画像を表示するか否かの判断方法の一例)
つぎに、ナビゲーション装置300による、第二国の交通標識の画像を表示するか否かの判断方法の一例について説明する。図9は、ナビゲーション装置300による、第二国の交通標識の画像を表示するか否かの判断方法の一例を示す説明図である。
【0057】
図9は、ナビゲーション装置300の周辺の地図を模式的に示したものである。図9において、車両900は、ナビゲーション装置300を搭載している車両を示す。また、領域910は、ナビゲーション装置300による撮像領域を示す。また、経路920は、車両900の目的地までの経路を示す。
【0058】
ここで、領域910内には、第一国の交通標識902、904、906、および908が存在する。ここで、ナビゲーション装置300は、車両900にとって必要な交通標識のみを対象として、当該交通標識に対応付けられている第二国の交通標識の画像を、ナビゲーション装置300が撮像した画像上に表示してもよい。たとえば、車両900の経路920上に存在する交通標識のみを対象として、当該交通標識に対応付けられている第二国の交通標識の画像を、ナビゲーション装置300が撮像した画像上に表示してもよい。図9に示す例では、交差点を左折する経路920上に存在するのは、第一国の交通標識902のみである。この場合、ナビゲーション装置300は、経路920上に存在する第一国の交通標識902のみを対象として、当該第一国の交通標識902に対応付けられている第二国の交通標識の画像を、ナビゲーション装置300が撮像した画像上に表示してもよい。仮に車両900の経路が交差点を直進するものであれば、この経路上に存在する第一国の交通標識902,904,906,908のそれぞれを対象として、当該第一国の交通標識902,904,906,908に対応付けられている第二国の交通標識の画像を、ナビゲーション装置300が撮像した画像上に表示してもよい。
【0059】
以上説明したように、本実施例にかかるナビゲーション装置300は、撮像した画像において第一国の交通標識を認識し、これに対応付けられている第二国の交通標識の画像を、撮像した画像上において、認識された第一国の交通標識と対応付けて表示する構成とした。これにより、ナビゲーション装置300は、ユーザーに対し、撮像した画像の撮像領域内に存在する交通標識の意味だけでなく、その交通標識が示されている位置までも、容易かつ直感的に把握させることができる。
【0060】
特に、本実施例にかかるナビゲーション装置300は、撮像した画像に写し出されている第一国の交通標識の画像に置き換えて、または並べて、第二国の交通標識の画像を表示する構成とした。これにより、ナビゲーション装置300は、ユーザーに対し、撮像した画像の撮像領域内に存在する交通標識の位置を、より容易かつ直感的に把握させることができる。
【0061】
さらに、本実施例にかかるナビゲーション装置300は、撮像した画像の撮像領域内に存在する第一国の交通標識を特定し、特定した第一国の交通標識に対応付けられている第二国の交通標識の画像を、撮像した画像上における、特定した位置に対応させて表示する構成とした。これにより、ナビゲーション装置300は、障害物や撮影の不具合などにより、撮像した画像から第一国の交通標識を認識できなかった場合であっても、この第一国の交通標識に対応付けられている第二国の交通標識の画像を、適切な位置に表示することができる。このため、ユーザーに対し、撮像した画像の撮像領域内に存在する交通標識の意味およびその位置を、容易かつ直感的に把握させることができる。
【0062】
さらに、本実施例にかかるナビゲーション装置300は、撮像した画像の撮像領域内に存在する第一国の交通標識のうち、経路上にないものについては、この第一国の交通標識に対応付けられている第二国の交通標識の画像を表示しない構成とした。これにより、ナビゲーション装置300は、ユーザーに対し、撮像した画像の撮像領域内に存在する交通標識のうち、ユーザーにとって必要な交通標識を注視させ、この交通標識の意味および位置を、容易かつ直感的に把握させることができる。
【0063】
なお、本実施例で説明した表示制御方法は、予め用意されたプログラムをコンピュータで実行することにより実現することができる。このプログラムは、ハードディスク、フレキシブルディスク、CD−ROM、MO、DVDなどのコンピュータで読み取り可能な記録媒体に記録され、コンピュータによって記録媒体から読み出されることによって実行される。また、このプログラムは、インターネットなどのネットワークを介して配布することが可能な伝送媒体であってもよい。
【符号の説明】
【0064】
100 表示制御装置
102 格納部
104 撮像部
106 取得部
108 認識部
110 制御部
112 表示部
114 決定部
116 特定部
300 ナビゲーション装置
500 画像
502 第一国の交通標識の画像
504 第二国の交通標識の画像
【特許請求の範囲】
【請求項1】
撮像部によって撮像された画像を取得する取得部と、
前記取得部が取得した画像における第一国の交通標識を認識する認識部と、
認識された第一国の交通標識に対応付けられている、第二国の交通標識の画像を格納部から抽出し、抽出した第二国の交通標識の画像を、前記取得部が取得した画像上において、前記第一国の交通標識と対応付けて表示するように、表示部による表示を制御する制御部と、
を備えることを特徴とする表示制御装置。
【請求項2】
前記制御部は、
前記取得部が取得した画像における、前記第一国の交通標識の画像に重畳して、前記第二国の交通標識の画像を表示させることを特徴とする請求項1に記載の表示制御装置。
【請求項3】
前記制御部は、
前記取得部が取得した画像における、前記第一国の交通標識の画像に並べて、前記第二国の交通標識の画像を表示させることを特徴とする請求項1に記載の表示制御装置。
【請求項4】
前記撮像部の撮像領域内に存在する前記第一国の交通標識を前記認識部が認識しない場合、前記第一国の交通標識およびその位置を特定する特定部をさらに備え、
前記制御部は、
前記特定部によって特定された第一国の交通標識に対応付けられている第二国の交通標識の画像を格納部から抽出し、抽出した第二国の交通標識の画像を、前記取得部が取得した画像上における、前記特定部が特定した位置に対応させて表示するように、表示部による表示を制御することを特徴とする請求項1〜3のいずれか一つに記載の表示制御装置。
【請求項5】
前記取得部は、
目的地までの経路に関する経路情報をさらに取得し、
前記制御部は、
前記取得部が取得した画像における第一国の交通標識のうち、前記経路上にないものについては、この第一国の標識に対応付けられている第二国の交通標識の画像を表示しないように、表示部による表示を制御することを特徴とする請求項1〜4のいずれか一つに記載の表示制御装置。
【請求項6】
撮像部によって撮像された画像を取得する取得工程と、
前記取得工程で取得された画像における第一国の交通標識を認識する認識工程と、
認識された第一国の交通標識に対応付けられている、第二国の交通標識の画像を格納部から抽出し、抽出した第二国の交通標識の画像を、前記取得工程で取得された画像上に表示するように、表示部による表示を制御する制御工程と、
を含んだことを特徴とする表示制御方法。
【請求項7】
請求項6に記載の表示制御方法をコンピュータに実行させることを特徴とするプログラム。
【請求項8】
請求項7に記載のプログラムを記録したことを特徴とするコンピュータに読み取り可能な記録媒体。
【請求項1】
撮像部によって撮像された画像を取得する取得部と、
前記取得部が取得した画像における第一国の交通標識を認識する認識部と、
認識された第一国の交通標識に対応付けられている、第二国の交通標識の画像を格納部から抽出し、抽出した第二国の交通標識の画像を、前記取得部が取得した画像上において、前記第一国の交通標識と対応付けて表示するように、表示部による表示を制御する制御部と、
を備えることを特徴とする表示制御装置。
【請求項2】
前記制御部は、
前記取得部が取得した画像における、前記第一国の交通標識の画像に重畳して、前記第二国の交通標識の画像を表示させることを特徴とする請求項1に記載の表示制御装置。
【請求項3】
前記制御部は、
前記取得部が取得した画像における、前記第一国の交通標識の画像に並べて、前記第二国の交通標識の画像を表示させることを特徴とする請求項1に記載の表示制御装置。
【請求項4】
前記撮像部の撮像領域内に存在する前記第一国の交通標識を前記認識部が認識しない場合、前記第一国の交通標識およびその位置を特定する特定部をさらに備え、
前記制御部は、
前記特定部によって特定された第一国の交通標識に対応付けられている第二国の交通標識の画像を格納部から抽出し、抽出した第二国の交通標識の画像を、前記取得部が取得した画像上における、前記特定部が特定した位置に対応させて表示するように、表示部による表示を制御することを特徴とする請求項1〜3のいずれか一つに記載の表示制御装置。
【請求項5】
前記取得部は、
目的地までの経路に関する経路情報をさらに取得し、
前記制御部は、
前記取得部が取得した画像における第一国の交通標識のうち、前記経路上にないものについては、この第一国の標識に対応付けられている第二国の交通標識の画像を表示しないように、表示部による表示を制御することを特徴とする請求項1〜4のいずれか一つに記載の表示制御装置。
【請求項6】
撮像部によって撮像された画像を取得する取得工程と、
前記取得工程で取得された画像における第一国の交通標識を認識する認識工程と、
認識された第一国の交通標識に対応付けられている、第二国の交通標識の画像を格納部から抽出し、抽出した第二国の交通標識の画像を、前記取得工程で取得された画像上に表示するように、表示部による表示を制御する制御工程と、
を含んだことを特徴とする表示制御方法。
【請求項7】
請求項6に記載の表示制御方法をコンピュータに実行させることを特徴とするプログラム。
【請求項8】
請求項7に記載のプログラムを記録したことを特徴とするコンピュータに読み取り可能な記録媒体。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2011−179920(P2011−179920A)
【公開日】平成23年9月15日(2011.9.15)
【国際特許分類】
【出願番号】特願2010−43402(P2010−43402)
【出願日】平成22年2月26日(2010.2.26)
【出願人】(000005016)パイオニア株式会社 (3,620)
【Fターム(参考)】
【公開日】平成23年9月15日(2011.9.15)
【国際特許分類】
【出願日】平成22年2月26日(2010.2.26)
【出願人】(000005016)パイオニア株式会社 (3,620)
【Fターム(参考)】
[ Back to top ]