
表示制御装置、表示制御方法およびサーバ
【課題】旅行区間におけるエネルギー消費量を正確に推定し、かつ、車両の走行可能な範囲を正確に推定すること。
【解決手段】表示制御装置100は、移動体の駆動源のバッテリの残量に基づき、前記移動体が目的地まで航続可能であるか否かを表示させる表示制御信号を生成するものであり、移動体が前記目的地まで移動する経路で消費する前記バッテリの消費量を算出する算出部102と、算出部102の算出結果に基づき、移動体が目的地まで航続可能か否かを判定する判定部103と、移動体が目的地まで航続可能な場合には、目的地まで航続した後のバッテリの残量を第一の表示形態で表示させ、移動体が目的地まで航続不可能な場合には、目的地まで航続するために必要なバッテリの不足分を、第一の表示形態と視覚的に異なる第二の表示形態で表示させる表示制御信号を生成する表示制御部104と、を備える。
【解決手段】表示制御装置100は、移動体の駆動源のバッテリの残量に基づき、前記移動体が目的地まで航続可能であるか否かを表示させる表示制御信号を生成するものであり、移動体が前記目的地まで移動する経路で消費する前記バッテリの消費量を算出する算出部102と、算出部102の算出結果に基づき、移動体が目的地まで航続可能か否かを判定する判定部103と、移動体が目的地まで航続可能な場合には、目的地まで航続した後のバッテリの残量を第一の表示形態で表示させ、移動体が目的地まで航続不可能な場合には、目的地まで航続するために必要なバッテリの不足分を、第一の表示形態と視覚的に異なる第二の表示形態で表示させる表示制御信号を生成する表示制御部104と、を備える。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、電気自動車のバッテリ残量による航続可能な状態を表示する表示制御装置、表示制御方法およびサーバに関する。ただし、この発明の利用は、表示制御装置、表示制御方法およびサーバに限らない。
【背景技術】
【0002】
従来、電気自動車は、バッテリを電力源として走行するため、バッテリの残量を検知し、目的地までの航続が可能かどうかを判断し、報知する技術が開示されている(たとえば、下記特許文献1参照。)。この技術では、目的地を入力することにより、現在のバッテリ残量に基づいて目的地までの(および出発地への往復)航続が可能であるかを文字「往復できます」、あるいは「往復できません」と表示するため、目的地までの航続が可能であるかを知ることができる。
【0003】
また、現在地を中心として現在のバッテリ残量で到達可能な範囲を円で表示する構成の技術が開示されている(たとえば、下記特許文献2参照。)。この技術では、通常走行時における到達可能エリアと、エコノミー走行時における到達可能エリアがそれぞれ円で表示され、現在のバッテリで移動できる範囲を知ることができる。
【0004】
また、現在のバッテリ残量により、目的地までの距離と、走行可能距離とを可視的に報知する技術がある(たとえば、下記特許文献3参照。)。この技術では、現在のバッテリ残量で目的地まで到達不可能な場合には、充電ステーションまで実線で経路を示し、充電後の経路を点線で示す表示をおこなう。また、数値で表示もでき、目的地を設定した場合、目的地までの走行距離と、現在の走行距離とを並べて表示している。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2004−61247号公報
【特許文献2】特開2001−112121号公報
【特許文献3】特開2006−115623号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、上述した従来技術では、目的地へのバッテリの必要量と不足量とを容易に知ることができない。特許文献1の技術では、目的地まで走行可能であるか否かを文字で表示するだけであり、走行ができない場合、どの程度バッテリが不足しているかを把握することができない。
【0007】
また、特許文献2の技術では、走行可能範囲を地図上で表示するため、通常の電気自動車が走行可能な距離(たとえば100km以上)の広域を地図表示しなければ確認することができない。ナビゲーション装置等で現在位置を詳細地図で表示している場合、地図の尺度を数段階、広域に切り替える操作が必要となり煩雑になる。また、地図の縮尺を代えるため、到達距離が直感的に分かりにくい。
【0008】
さらに、特許文献3の技術では、目的地までの距離と、走行可能距離を数字および地図上で表示するが、現在地にて目的地まで到達するにはどの程度バッテリの不足分があるか分からない。また、バッテリの充電可能量がどの程度あるかも分からないため、たとえば、現在地でバッテリの充電をおこなうことで目的地まで到達できるものであるかを判断できない。
【課題を解決するための手段】
【0009】
上述した課題を解決し、目的を達成するため、請求項1の発明にかかる表示制御装置は、移動体の駆動源のバッテリの残量を取得する残量取得部と、前記移動体が目的地まで移動する経路で消費する前記バッテリの消費量を算出する算出部と、前記移動体が前記目的地に到るまでの経路に存在する前記バッテリを補充するための補充装置の位置を取得する位置取得部と、前記残量取得部により取得されたバッテリの残量および前記算出部により算出されたバッテリの消費量に基づき、前記移動体が前記目的地まで航続不可能な場合には、現時点での前記バッテリの残量と共に、前記目的地まで航続するために必要なバッテリの不足分の量をバッテリの量に対応した表示形態で表示させ、前記移動体の現在地から前記目的地までの区間の距離に対応して前記補充装置の位置を表示させる表示制御部と、を備えることを特徴とする。
【0010】
また、請求項2の発明にかかる表示制御方法は、移動体の駆動源のバッテリの残量に基づき、前記移動体が目的地まで航続不可能な場合に表示される表示制御信号を生成する表示制御装置の表示制御方法において、前記移動体の駆動源のバッテリの残量を取得する残量取得工程と、前記移動体が目的地まで移動する経路で消費する前記バッテリの消費量を算出する算出工程と、前記移動体が前記目的地に到るまでの経路に存在する前記バッテリを補充するための補充装置の位置を取得する位置取得工程と、前記残量取得工程により取得されたバッテリの残量および前記算出工程により算出されたバッテリの消費量に基づき、前記移動体が前記目的地まで航続不可能な場合には、現時点での前記バッテリの残量と共に、前記目的地まで航続するために必要なバッテリの不足分の量をバッテリの量に対応した表示形態で表示させ、前記移動体の現在地から前記目的地までの区間の距離に対応して前記補充装置の位置を表示させる表示制御工程と、を含むことを特徴とする。
【0011】
また、請求項3の発明にかかるサーバは、移動体の駆動源のバッテリの残量、前記移動体が目的地まで移動する経路で消費する前記バッテリの消費量、および、前記移動体が前記目的地に到るまでの経路に存在する前記バッテリを補充するための補充装置の位置を受信する受信部と、前記バッテリの残量および前記バッテリの消費量に基づき、前記移動体が前記目的地まで航続不可能な場合には、現時点での前記バッテリの残量と共に、前記目的地まで航続するために必要なバッテリの不足分の量をバッテリの量に対応した表示形態で表示させ、前記移動体の現在地から前記目的地までの区間の距離に対応して前記補充装置の位置を表示させる表示出力を制御する表示制御部と、前記表示制御部により制御された表示出力を送信する送信部と、を備えることを特徴とする。
【0012】
また、請求項4の発明にかかる表示制御装置は、目的地まで移動することで消費する移動体の駆動源であるバッテリの消費量を図形にて表示する表示部と、前記移動体の現在地から前記目的地までに消費する前記バッテリの消費量を示す図形を当該バッテリの残量と不足量とに区別した態様で表示させる表示制御部と、を備え、前記表示制御部は、前記バッテリの残量にて到達可能となる位置に存在するバッテリの補充装置を示す図形を、前記区別して表示されるバッテリの残量に対応して表示させることを特徴とする。
【図面の簡単な説明】
【0013】
【図1】実施の形態1にかかる表示制御システムの機能的構成を示すブロック図である。
【図2】表示制御システムによる表示制御処理の手順を示すフローチャートである。
【図3】サーバのハードウェア構成を示すブロック図である。
【図4】航続可能時の表示例を示す図である。
【図5】航続不可能時の表示例を示す図である。
【図6】目的地を設定しない場合の航続可能時の表示例を示す図である。
【図7】航続不可能時の表示例を示す図である。
【図8】経路案内情報とともに航続に関するバーグラフの表示例を示す図である。
【図9】実施の形態2にかかる表示制御システムの機能的構成を示すブロック図である。
【図10】実施の形態3にかかる表示制御システムの機能的構成を示すブロック図である。
【図11】実施の形態4にかかる表示制御システムの機能的構成を示すブロック図である。
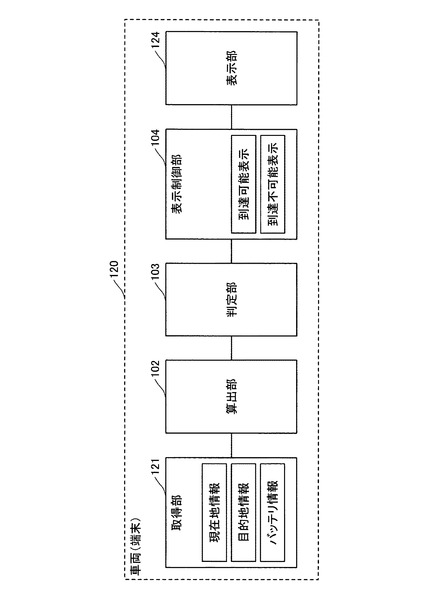
【図12】実施の形態5にかかる表示制御装置の機能的構成を示すブロック図である。
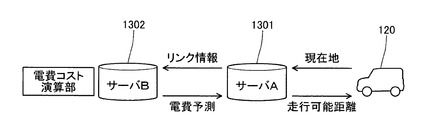
【図13】実施の形態6にかかる各部の機能別構成を示す概要図である。
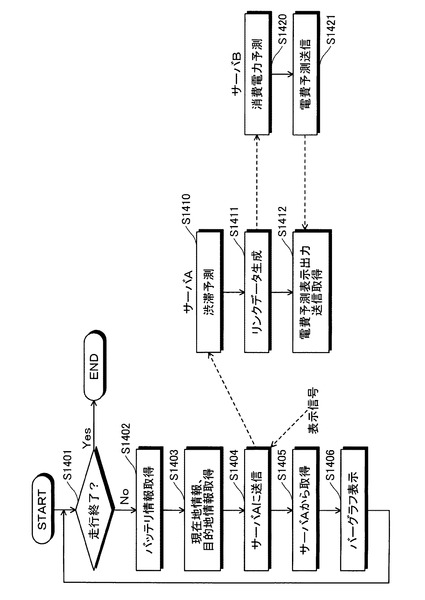
【図14】実施の形態6にかかる処理手順を示すフローチャートである。
【発明を実施するための形態】
【0014】
以下に添付図面を参照して、この発明にかかる表示制御装置、表示制御方法およびサーバの好適な実施の形態を詳細に説明する。以下に説明する表示制御においては、移動体の現在地と、目的地と、バッテリ情報に基づき、目的地までの航続が可能であるか否かを算出し、ユーザに分かりやすく報知する。報知は表示等により、目的地まで到達できる場合と、到達できない場合とで異なる色等を用いてユーザが容易に判別可能にする。また、目的地までの走行について、余ったバッテリ残量、あるいは不足分のバッテリ量についても表示する。
【0015】
(実施の形態1)
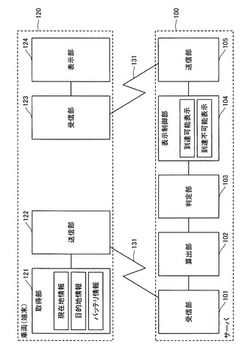
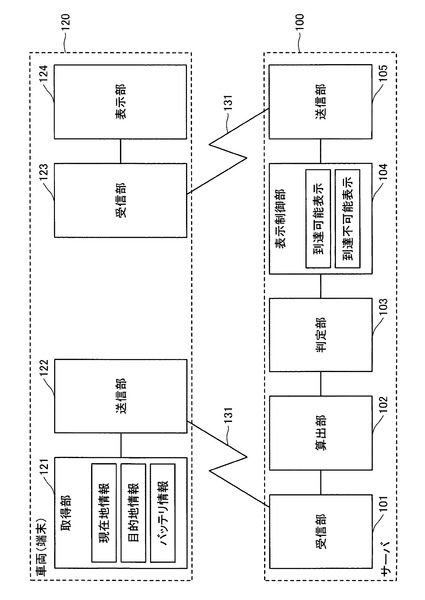
図1は、実施の形態1にかかる表示制御システムの機能的構成を示すブロック図である。図1に示す構成例では、移動体(車両)には、端末120が搭載され、移動体(端末)120の外部に設けられたサーバ100との間で情報を通信によりやりとりする構成である。
【0016】
サーバ100には、受信部101と、算出部102と、判定部103と、表示制御部104と、送信部105と、を備える。また、端末120には、取得部121と、送信部122と、受信部123と、表示部124と、を備える。
【0017】
(端末の構成)
端末120の取得部121は、現在地情報と、目的地情報と、バッテリ情報をそれぞれ取得する。現在地情報と、目的地情報はそれぞれの位置情報、たとえば、緯度経度であり、GPS等により取得する。バッテリ情報は、移動体のバッテリの最大充電容量と、現在のバッテリ残量を検出する。これらの情報は、移動体内のエレクトロニックコントロールユニット(ECU:Electronic Control Unit)を介し、たとえばCAN(Controller Area Network)など通信プロトコルによって動作する車内通信ネットワーク(以下、単にCANとする)から取得することができる。
【0018】
送信部122は、取得部121で取得した現在地情報と、目的地情報と、バッテリ情報を通信網131を介してサーバ100に送信する。また、受信部123は、通信網131を介してサーバ100からバッテリ走行情報を受信する。バッテリ走行情報とは、現在のバッテリ残量で目的地まで航続可能であるか否か、および航続可能である場合におけるバッテリ残量、または航続不可能である場合に不足分のバッテリ量、その他の情報からなる。
【0019】
受信部123を介して受信したバッテリ走行情報は、表示部124に表示され、ユーザは、表示された内容により、目的地まで航続可能であるか、および航続可能である場合におけるバッテリ残量、または航続不可能である場合に不足分のバッテリ量、その他の情報を得ることができる。
【0020】
(サーバの構成)
サーバの受信部101は、端末120の送信部122から送信された現在地情報と、目的地情報と、バッテリ情報を受信し、算出部102に出力する。算出部102は、現在地情報と、目的地情報と、バッテリ情報とに基づき、現在のバッテリ残量で航続可能な距離を算出する。この際、算出部102は、地図情報を用いて、現在地から目的地方向に対して航続可能な範囲の複数の経路を探索する。
【0021】
判定部103は、算出部102で算出された、航続可能な距離が目的地まで達するか否かを判定する。判定の結果、航続可能な距離が目的地まで達する場合には、目的地までに消費するバッテリ量と、目的地到達後のバッテリの残量を合わせて出力する。航続可能な距離が目的地まで達することができない場合には、バッテリを全て消費したときの地点と、この地点から目的地までの不足分のバッテリ量を合わせて出力する。
【0022】
表示制御部104は、判定部103による判定の結果、航続可能な距離が目的地まで達するか否かにより表示内容を異ならせて表示する表示信号を出力する。到達可能な場合には、到達可能なことが一目で分かるバーグラフ表示をおこなう。この際、バーグラフは、目的地までに消費するバッテリ量と、目的地到達後のバッテリの残量とで区切った表示信号を出力する。
【0023】
一方、到達不可能な場合には、到達不可能なことを一目で分かる色等を用いたバーグラフ表示により、ユーザに対し到達不可能であることを直感的に報知する。この際、バーグラフは、バッテリを全て消費したときの地点と、この地点から目的地までの不足分のバッテリ量を区切った表示信号を出力する。
【0024】
送信部105は、表示制御部104から出力された表示信号を端末120に送信する。これにより、上記の端末120では、サーバ100側で表示制御された表示信号を受信し、表示部124上に表示出力できる。
【0025】
(表示制御処理内容について)
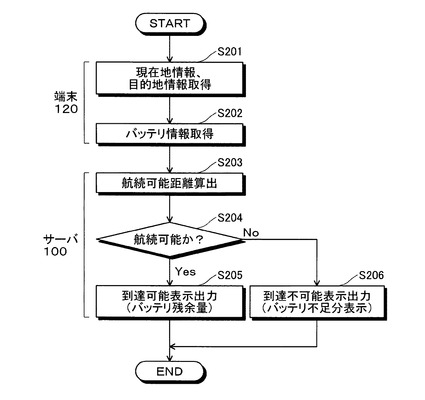
図2は、表示制御システムによる表示制御処理の手順を示すフローチャートである。はじめに、端末120の取得部121は、車両に設定された現在地情報と、目的地情報を取得する(ステップS201)。つぎに、車両のバッテリ情報を取得する(ステップS202)。このバッテリ情報は、バッテリの最大充電容量と、現在のバッテリ残量である。
【0026】
これらステップS201,ステップS202で取得された情報は、端末120の送信部122から通信網131を介してサーバ100に送信される。サーバ100の受信部101は、端末120から送信された情報を受信する。算出部102は、受信した現在地情報と、目的地情報と、バッテリ情報とに基づき、航続可能距離を算出する(ステップS203)。
【0027】
この際、算出部102は、取得した地図データに含まれるリンク情報に基づいて、移動体の目的地までの経路を探索する。リンクとは、道路種別や速度帯域が変化する地点、都道府県や府市町村の境界など地域が変わる地点などで区切られた区間である。リンク情報は、リンクごと設定されている。リンク情報には、リンクの位置や高度、リンクの距離、移動体の移動時間などが含まれる。
【0028】
具体的には、算出部102は、たとえば、移動体の出発地から目的地までの隣り合うリンクを接続して構成した1経路を、リンクの接続を種々変更して複数探索する。このとき、各リンクのリンク情報を、経路探索時の重み付けとして用いてもよい。重み付けに応じて時間優先、距離優先、消費エネルギー優先の経路探索をおこなうことができる。
【0029】
たとえば、経路探索条件を時間優先とした場合、最短で移動可能な各リンクどうしを接続して構成した1経路を探索する。また、移動体の出発地から目的地までのリンクコストをリンク情報ごとに積算する。そして、各リンクにおけるリンク情報をリンクコストとして経路探索をおこなう。各リンク情報の積算コストに応じて、各リンク情報の重み付けを変化させてもよい。
【0030】
つぎに、判定部103は、算出部102で算出された、航続可能な距離が目的地まで航続可能であるか否かを判定する(ステップS204)。そして、表示制御部104は判定部103の判定の結果、目的地まで航続可能な場合には(ステップS204:Yes)、到達可能なことを示す表示出力をおこなう(第1の表示形態)。また、目的地までに消費するバッテリ量と、目的地到達後のバッテリの残量を合わせて出力し(ステップS205)、一連の処理を終了する。
【0031】
一方、表示制御部104は、判定部103の判定の結果、目的地まで航続不可能な場合には(ステップS204:No)、到達不可能なことを示す表示出力をおこなう(第2の表示形態)。また、バッテリを全て消費したときの地点と、この地点から目的地までの不足分のバッテリ量を合わせて出力し(ステップS206)、一連の処理を終了する。
【0032】
上記表示制御部104による表示出力は、送信部105を介して端末120の受信部123により受信され、表示部124に表示されユーザに報知される。
【0033】
以上説明したように、実施の形態にかかる表示制御システムは、移動体が現在のバッテリで目的地まで航続可能であるか否かを判断し、航続可能であるか否かに応じて異なる表示内容をユーザに表示することにより、ユーザは直感的に目的地までの航続が可能かどうかを判断できる。また、航続可能であれば、バッテリ残量を合わせて表示するため、余裕がある状態をあらかじめ認識して走行できる。航続不可能であればどの程度バッテリが不足しているのかが表示されるため、バッテリの不足分を考慮した航行が可能となる。
【実施例1】
【0034】
(サーバ100のハードウェア構成)
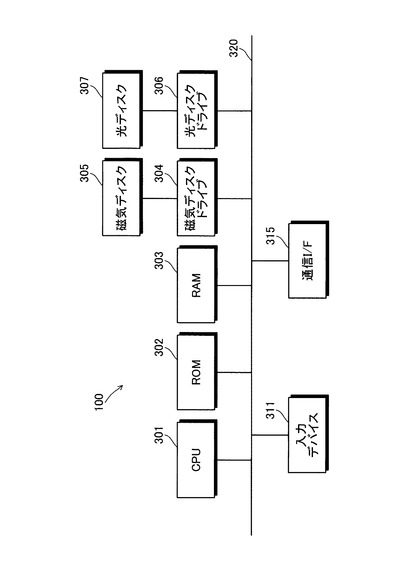
つぎに、サーバ100のハードウェア構成について説明する。図3は、サーバのハードウェア構成を示すブロック図である。図3において、サーバ100は、CPU301、ROM302、RAM303、磁気ディスクドライブ304、磁気ディスク305、光ディスクドライブ306、光ディスク307、入力デバイス311、通信I/F315を備えている。各構成部301〜315は、バス320によってそれぞれ接続されている。
【0035】
まず、CPU301は、サーバ100の全体の制御を司る。ROM302は、上述した表示制御などのプログラムを記録している。また、RAM303は、CPU301のワークエリアとして使用される。すなわち、CPU301は、RAM303をワークエリアとして使用しながら、ROM302に記録された各種プログラムを実行することによって、サーバ100の全体の制御を司る。
【0036】
磁気ディスクドライブ304は、CPU301の制御にしたがって磁気ディスク305に対するデータの読み取り/書き込みを制御する。磁気ディスク305は、磁気ディスクドライブ304の制御で書き込まれたデータを記録する。磁気ディスク305としては、たとえば、HD(ハードディスク)やFD(フレキシブルディスク)を用いることができる。
【0037】
また、光ディスクドライブ306は、CPU301の制御にしたがって光ディスク307に対するデータの読み取り/書き込みを制御する。光ディスク307は、光ディスクドライブ306の制御にしたがってデータが読み出される着脱自在な記録媒体である。光ディスク307は、書き込み可能な記録媒体を利用することもできる。着脱可能な記録媒体として、光ディスク307のほか、MO、メモリカードなどを用いることができる。
【0038】
磁気ディスク305および光ディスク307に記録される情報の一例としては、地図データや各リンクにおける位置情報や高度などのリンク情報が挙げられる。地図データは、経路探索処理や経路誘導処理に用いられ、建物、河川、地表面などの地物(フィーチャ)をあらわす背景データ、道路の形状をリンクやノードなどであらわす道路形状データなどを含んでいる。
【0039】
入力デバイス311は、文字、数値、各種指示などの入力のための複数のキーを備えたリモコン、キーボード、タッチパネルなどが挙げられる。入力デバイス311は、リモコン、キーボード、タッチパネルのうちいずれか1つの形態によって実現されてもよいが、複数の形態によって実現することも可能である。
【0040】
通信I/F315は、有線または無線を介してネットワークに接続され、サーバ100およびCPU301のインターフェースとして機能する。ネットワークとして機能する通信網には、公衆回線網や携帯電話網、DSRC(Dedicated Short Range Communication)、LAN、WANなどがある。通信I/F315は、たとえば、公衆回線用接続モジュールなどである。
【0041】
図1に示した取得部121、算出部102、判定部103、表示制御部104は、上述したROM302、RAM303、磁気ディスク305、光ディスク307などに記録されたプログラムやデータを用いて、CPU301が所定のプログラムを実行することによってその機能を実現する。
【0042】
(端末120のハードウェア構成)
端末120のハードウェア構成は、図3に示したサーバ100のハードウェア構成同様に、CPU、ROM、RAMを備え、CPUが、RAMをワークエリアとして使用しながら、ROMに記録された各種プログラムを実行することによって、端末120の全体の制御を司る。
【0043】
また、各種センサとしてGPS機能を有して、現在地と、目的地の位置情報を取得できる。端末120に地図機能を有する構成とすれば、地図上で目的地近傍を表示させて目的地の位置情報を容易に取得することができる。また、各種センサとしては、移動体のバッテリの最大充電容量と、現在のバッテリ残量を取得する。このほか、通信I/Fを備えて外部のサーバ100と通信により情報の送受をおこなう。
【0044】
また、端末120には、入力デバイスを備え、各種操作入力が可能である。このほか、磁気ディスクドライブ、磁気ディスク、光ディスクドライブ、光ディスク等を備えて、各種情報を取得することもできる。
【0045】
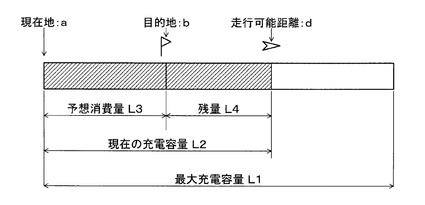
つぎに、表示出力の一例について説明する。図4は、航続可能時の表示例を示す図である。判定部103による判定の結果、表示制御部104は、目的地まで航続可能な場合の表示例を示す。この場合、端末120の表示部124上には、到達可能なことを示す表示出力がなされる。
【0046】
図4に示すように、この表示は、バーグラフ(棒グラフ、またはドット)により表示される。そして、バーグラフの長さは、バッテリの最大充電容量L1として表示する。また、現在の充電容量L2を一端(図の左端)から所定長さで表示する。図の左端は現在地aに相当する。最大充電容量L1に対する、現在の充電容量L2により、バッテリがあとどの程度充電できる状態であるかを知ることができる。
【0047】
また、現在の充電容量L2のうち、目的地bまでの航行に消費するバッテリの予想消費量L3を現在地aを起点として目的地bまでの間の所定の長さで表示する。目的地bの位置からは、バッテリの残量L4を走行可能距離dまでの間の所定の長さで表示する。図4に示す表示は、目的地まで航続可能な場合の表示例であるため、バーグラフとして表示する予想消費量L3と、バッテリの残量L4は、いずれも目的地bまでの航続が可能であることを示す色、たとえば、予想消費量L3は水色、バッテリの残量L4は緑色など、安心した航続が可能であることを示す色を用いて表示する。
【0048】
これにより、ユーザは、現在の充電容量L2で目的地bまでの航続が可能なことを表示されている色により一目で安心して把握、認識できるようになる。加えて、目的地bに到着後であっても、バッテリの残量L4の長さの表示によって、バッテリの残量がどの程度であるか一目で把握できるようになる。
【0049】
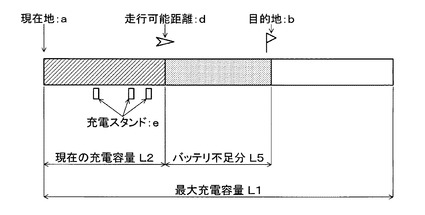
図5は、航続不可能時の表示例を示す図である。判定部103による判定の結果、目的地まで航続不可能な場合の表示例を示す。この場合、端末120の表示部124上には、到達不可能なことを示す表示出力がなされる。
【0050】
図5に示すように、航続不可能な場合においても、バーグラフの長さは、バッテリの最大充電容量L1である。また、現在の充電容量L2を一端(図の左端)から所定長さで表示する。図の左端は現在地aに相当する。また、現在の充電容量L2の他端(図の右端)が走行可能距離dとなる。最大充電容量L1に対する、現在の充電容量L2により、バッテリがあとどの程度充電できる状態であるかを知ることができる。
【0051】
そして、目的地bまでの航行について、現在の充電容量L2(走行可能距離d)から先(右側)の目的地bまでの区間について、バッテリ不足分L5であるとして所定の長さで表示する。図5に示す表示において、バーグラフとして表示する現在の充電容量L2については、たとえば、水色など、安心した航続が可能であることを示す色を用いて表示する。
【0052】
しかし、目的地まで航続不可能な場合の表示例であるため、バッテリ不足分L5については、目的地bまでの航行に不足した分であるため、この部分は、赤色など、バッテリが不足していることを容易に知らせることができる目立つ色を用いて表示する。
【0053】
これにより、ユーザは、現在の充電容量L2で目的地bまでの航続が不可能なことを表示されている色により直ぐに把握、認識できるようになる。加えて、目的地bまでの航続にあとどれくらいバッテリ容量が必要であるか、バッテリ不足分L5の長さの表示によって、一目で把握できるようになる。これにより、目的地までの航続中にバッテリ充電が必要であることをあらかじめユーザが把握した状態で出発できるようになる。以上が第一表示制御信号に基づく画像表示である。
【0054】
また、図中e点は、それぞれバッテリを補充するための補充装置である充電スタンドの所在位置をポイントで示している。この充電スタンドの所在位置は、補充位置取得手段が現在地から目的地までの経路探索時に参照した地図情報に基づき、取得する。サーバ100は、取得した充電スタンドの所在位置をこのバーグラフ上における現在地aから目的地bまでの区間の距離に対応して表示させている。この画像は、上述した第一表示制御信号とともに生成される第二表示制御信号に基づいて表示される。これにより、ユーザは、充電スタンドの位置eの情報を得て、目的地bまでの航続が可能であることを知ることができ、安心して出発できるようになる。
【0055】
図5の表示例では、現在の充電容量L2の領域にだけ充電スタンドの位置eを表示させている。この表示によれば、現在のバッテリ残量で充電可能な充電スタンドでの充電を促すことができるようになる。なお、充電スタンドでの充電により、現在の充電容量L2が延びた場合であっても、目的地bまでの間における現在の充電容量L2のバーの範囲内での充電スタンドの位置eを表示させることで、常に充電スタンドの位置eを把握でき、次回以降の充電に関する情報を得ることができ、目的地bまで安心して航続できるようになる。
【実施例2】
【0056】
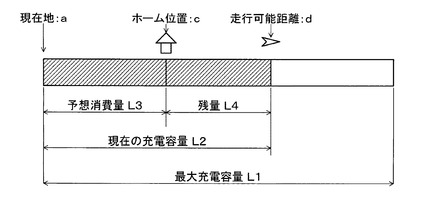
つぎに、目的地を設定しない場合の表示例について説明する。図6は、目的地を設定しない場合の航続可能時の表示例を示す図である。
【0057】
算出部102は、目的地を設定しない場合、ホーム位置が設定されていれば、ホーム位置を目的地とし、判定部103は、このホーム位置まで航続可能であるか否かを判定する。このため、目的地が取得できない場合、算出部102は、取得部121に対し、ホーム位置の設定を要求し、受け取る構成としておく。このホーム位置は、自宅の車庫など移動体が帰車する場所であり、あらかじめ端末120にホーム位置の緯度経度等を設定しておけばよい。
【0058】
バーグラフの長さは、バッテリの最大充電容量L1として表示し、現在の充電容量L2を一端(図の左端)から所定長さで表示する。図の左端は現在地aに相当する。最大充電容量L1に対する、現在の充電容量L2により、バッテリがあとどの程度充電できる状態であるかを知ることができる。
【0059】
そして、現在の充電容量L2のうち、ホーム位置cまでの航行に消費するバッテリの予想消費量L3を現在地aを起点としてホーム位置cまでの間の所定の長さで表示する。ホーム位置cの位置からは、バッテリの残量L4を走行可能距離dまでの間の所定の長さで表示する。図6に示す表示は、目的地まで航続可能な場合の表示例であるため、バーグラフとして表示する予想消費量L3と、バッテリの残量L4は、いずれもホーム位置cまでの航続が可能であることを示す色、たとえば、予想消費量L3は水色、バッテリの残量L4は緑色など、安心した航続が可能であることを示す色を用いて表示する。
【0060】
これにより、自宅等への帰宅時に目的地bを設定しないとき、ホーム位置cを目的地として設定するため、ユーザは、現在の充電容量L2でホーム位置cまでの航続が可能なことを表示されている色により一目で安心して把握、認識できるようになる。ホーム位置cには通常、充電設備を有しており、ホーム位置cで充電することができる。加えて、ホーム位置cに到着後であっても、バッテリの残量L4の長さの表示によって、バッテリの残量がどの程度であるか一目で把握できるようになる。
【0061】
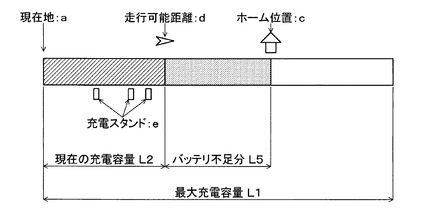
図7は、航続不可能時の表示例を示す図である。判定部103による判定の結果、ホーム位置まで航続不可能な場合の表示例を示す。この場合、端末120の表示部124上には、到達不可能なことを示す表示出力がなされる。
【0062】
図7に示すように、航続不可能な場合においても、バーグラフの長さは、バッテリの最大充電容量L1である。また、現在の充電容量L2を一端(図の左端)から所定長さで表示する。図の左端は現在地aに相当する。また、現在の充電容量L2の他端(図の右端)が走行可能距離dとなる。最大充電容量L1に対する、現在の充電容量L2により、バッテリがあとどの程度充電できる状態であるかを知ることができる。
【0063】
そして、ホーム位置cまでの航行について、現在の充電容量L2(走行可能距離d)から先(右側)のホーム位置cまでの区間について、バッテリ不足分L5であるとして所定の長さで表示する。図7に示す表示のうち、バーグラフとして表示する現在の充電容量L2については、たとえば、水色など、安心した航続が可能であることを示す色を用いて表示する。
【0064】
しかし、目的地まで航続不可能な場合の表示例であるため、バッテリ不足分L5については、ホーム位置cまでの航行に不足した分であるため、この部分は、赤色など、バッテリが不足していることを容易に知らせる色を用いて表示する。
【0065】
これにより、ユーザは、現在の充電容量L2でホーム位置cまでの航続が不可能なことを表示されている色により直ぐに把握、認識できるようになる。加えて、ホーム位置cまでの航続にあとどれくらいバッテリ容量が必要であるか、バッテリ不足分L5の長さの表示によって、一目で把握できるようになる。これにより、目的地までの航続中にバッテリ充電が必要であることをあらかじめユーザが把握した状態で出発できるようになる。
【0066】
また、この表示例においても、図中e点は、それぞれ充電スタンドの所在位置をポイントで示している。充電スタンドの所在位置をこのバーグラフ上における現在地aからホーム位置cまでの区間の距離に対応して表示させている。これにより、ユーザは、充電スタンドの位置eの情報を得て、ホーム位置cまでの航続が可能であることを知ることができ、安心して出発できるようになる。また、現在の充電容量L2の領域において、表示されている充電スタンドの位置eにより、ホーム位置cまで安心して航続できるようになる。
【実施例3】
【0067】
つぎに、上述したバークラフの長さの算出方法について説明する。図4に示した例に基づき説明する。バーグラフ全体の長さ(100%)は、最大充電容量L1に基づき設定する。また、最大充電量P1、現在の充電容量P2、予想消費電力P3とする。
これにより、目的地bまでのバーの長さL3=L1×P3/P1
現在の充電容量L2(航行可能な)の長さL2=L1×P2/P1に基づき得ることができる。
【実施例4】
【0068】
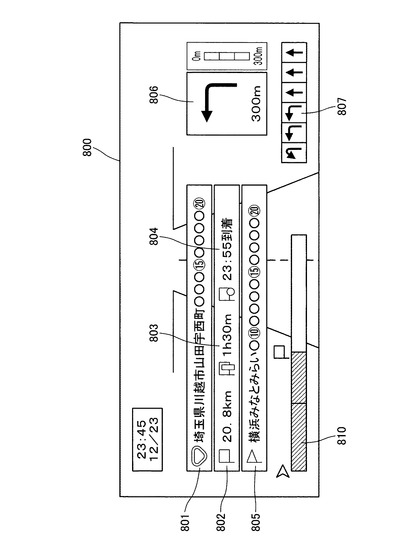
つぎに、上述したバーグラフを経路案内情報とともに表示する例について説明する。図8は、経路案内情報とともに航続に関するバーグラフの表示例を示す図である。経路案内情報は、端末120あるいはサーバ100が現在地と目的地の情報に基づき探索した経路として、端末120の表示部124に表示させる。この場合、端末120がたとえば、ナビゲーション機能を有しており、経路探索および経路案内の機能を有していれば、これら経路探索および経路案内の情報をサーバ100に送信する必要はない。
【0069】
そして、端末120は、端末120内部で生成した経路探索および経路案内の情報800を表示部124に表示させる。これらの情報800は、図8に示す現在地801、目的地までの距離802、所要時間803、到着時刻804、目的地805、つぎの交差点での進行方向806、以後の複数の交差点の進行方向807等からなる。
【0070】
そして、上述したバーグラフ表示にかかる表示信号の生成をサーバ100が実行し、端末120は、サーバ100からの表示出力をバーグラフ810として情報800の一部に重ねて表示する。重ねる場合でも、情報800の空き表示領域をあらかじめ設けておいたり、空いている箇所に表示させるようにする。これにより、経路探索および経路案内の情報800と共に、バーグラフ810を見ることができる。バーグラフ810は、図示のように、表示領域の下部等に、場所を取らず、少ないスペースで効率的に複数の情報を表示することができるため、表示部124の表示面積が小さくても視認性を高めることができる。なお、図8に示すバーグラフ810は、航続可能時の表示であるが、航続不可能時についても同様の箇所に表示される。
【0071】
(実施の形態2)
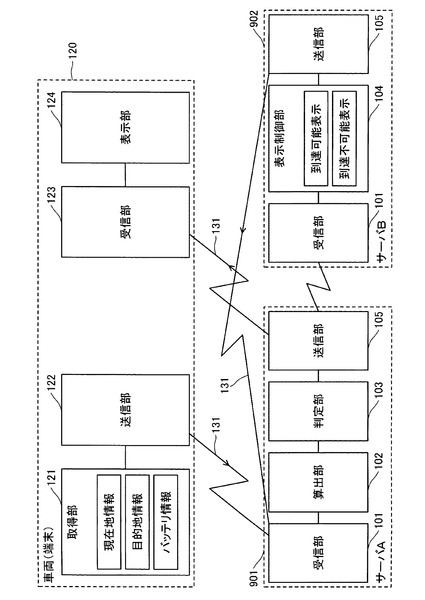
つぎに、本発明の実施の形態2について説明する。図9は、実施の形態2にかかる表示制御システムの機能的構成を示すブロック図である。図9に示す構成例では、実施の形態1で1箇所に配置されていたサーバ100を2箇所のサーバA(901),サーバB(902)に分けて分散処理する構成である。たとえば、サーバA(901)は、地域別に設けられ、端末120との間で情報をやりとりする。サーバB(902)は、たとえば1箇所に設けられ、複数のサーバA(901)からアクセスされ、バーグラフの表示だけに特化した処理をおこなう。
【0072】
端末120の構成は、実施の形態1(図1)と同様であり、サーバA(901)との間で通信をおこなう。
【0073】
サーバA(901)は、算出部102と、判定部103の構成を有する。そして、受信部101、および送信部105は端末120との間で通信をおこなう。
【0074】
サーバB(902)は、図示のように、表示制御部104の構成を有する。そして、受信部101、および送信部105は、サーバA(901)との間で通信をおこなう。このように、サーバA(901)と、サーバB(902)は、異なる機能別のサーバで構成することもできる。
【0075】
(実施の形態3)
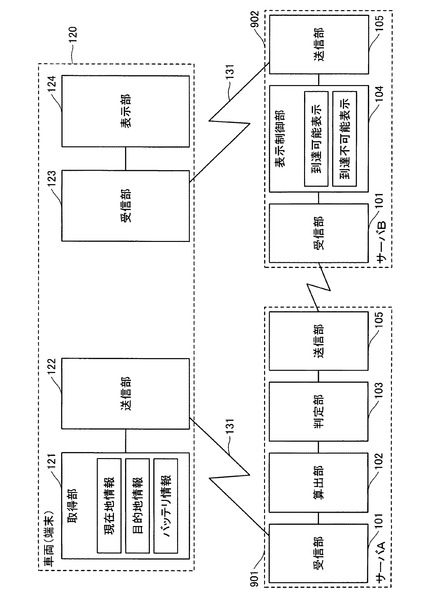
図10は、実施の形態3にかかる表示制御システムの機能的構成を示すブロック図である。図10に示す構成例は、2箇所のサーバA(901),サーバB(902)の構成は、実施の形態2(図9)と同様である。また、端末120の構成についても実施の形態1(図1)および実施の形態2(図9)と同様である。
【0076】
サーバA(901)は、端末120の取得部121が取得した情報を受信部101が受信開始し、算出部102と、判定部103の構成を有する。そして、送信部105は、サーバB(902)に判定結果を出力する。
【0077】
サーバB(902)は、受信部101を介して、サーバA(901)の判定結果を受信し、表示制御部104の構成を有する。そして、送信部105を介して、表示出力を端末120に送信する。端末120は、受信部123によりサーバB(902)から表示出力を受信し、表示部124に表示出力する。このように、サーバA(901)で処理した情報をサーバB(902)に出力し、サーバB(902)から端末120に出力する構成としてもよい。このように、サーバA(901)とサーバB(902)を異なる機能別のサーバで構成して用いることができる。
【0078】
(実施の形態4)
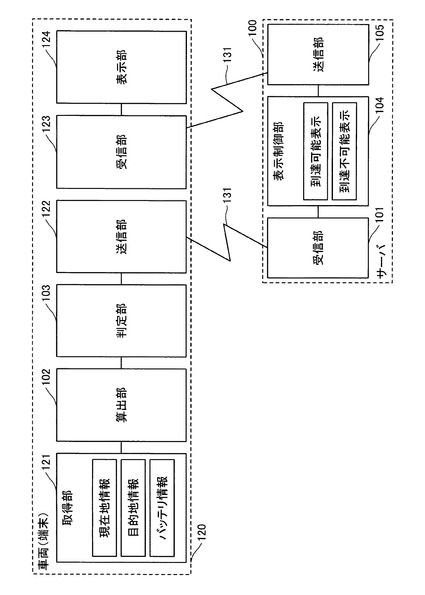
図11は、実施の形態4にかかる表示制御システムの機能的構成を示すブロック図である。図11に示す構成例では、端末120は、取得部121と、算出部102と、判定部103と表示部124とを備えている。また、送信部122は、判定部103の判定結果をサーバ100に送信し、受信部123は、サーバ100の表示制御部104の表示出力を受信し表示部124に表示する。
【0079】
サーバ100は、受信部101が端末120の判定部103の判定結果を受信し、表示制御部104により表示出力を生成し、送信部105に出力する。送信部105は、表示出力を端末120に送信する。このように、表示出力を生成する機能を外部のサーバ100を用いる構成とすることもできる。
【0080】
(実施の形態5)
図12は、実施の形態5にかかる表示制御装置の機能的構成を示すブロック図である。図12に示す構成例では、外部のサーバを用いず端末120に全ての機能を備えている。端末120は、たとえば、移動体に搭載されたナビゲーション装置を用いて構成することができる。この実施の形態5によれば、外部のサーバとの通信をおこなわずに、移動体内の端末120だけで全ての処理を実行できるようになる。
【0081】
(実施の形態6)
図13は、実施の形態6にかかる各部の機能別構成を示す概要図である。この実施の形態6では、一部の処理に外部の2つのサーバA(1301)と、サーバB(1302)を用いる。
【0082】
サーバA(1301)では、現在地と目的地の情報に基づき、経路探索および経路案内に特化した処理をおこなう。そして、サーバA(1301)は、サーバB(1302)に対して経路上のノード間のリンク情報と、バッテリ情報を送信する。サーバB(1302)では、リンク情報と、バッテリ情報に基づき、目的地までの経路に必要な消費電力(電費予測)をおこなう。
【0083】
サーバB(1302)は、たとえば、WebAPI(Application Programming Interface)であり、電費計算だけに特化した処理をおこない、電費予測の結果をサーバA(1301)に応答する。そして、サーバA(1301)は、目的地まで走行可能であるかバーグラフを生成し、端末120に送信する。
【0084】
実施の形態6の構成は、上述した実施の形態2(図9)、あるいは実施の形態3(図10)に示したように分離された2台のサーバを用いて処理機能を分担する構成に相当する。そして、移動体に位置する端末120は、上述した実施の形態で説明した取得部121と、送信部122と、受信部123と、表示部124の機能を有する。サーバA(1301)は、上述した実施の形態で説明した受信部101と、算出部102と、表示制御部104と、送信部105の機能を有する。算出部102は、上述したリンク情報を算出し、表示制御部104は、表示制御の表示出力(表示信号)を生成する。サーバB(1302)は、上述した実施の形態で説明した受信部101と、判定部103と、送信部105の機能を有する。判定部103は、電費予測の処理をおこない、目的地まで到達できるか否かを判定する。
【0085】
図14は、実施の形態6にかかる処理手順を示すフローチャートである。移動体の端末120でおこなう処理と、サーバA(1301)でおこなう処理と、サーバB(1302)でおこなう処理とをそれぞれ記載してある。端末120では、車両の移動後、走行終了までの間で以下の処理を実行し(ステップS1401:No)、走行終了となれば処理を終了する(ステップS1401:Yes)。
【0086】
はじめに、取得部121により、バッテリ情報を取得する(ステップS1402)。つぎに、取得部121により、現在地情報と、目的地情報を取得する(ステップS1403)。これら取得した情報は、送信部からサーバA(1301)に送信される(ステップS1404)。
【0087】
この後、端末120は、受信部によりサーバA(1301)から送信される表示信号を取得し(ステップS1405)、表示部124上にバーグラフ表示をおこなう(ステップS1406)。
【0088】
サーバA(1301)では、ステップS1404において、端末120から送信されたバッテリ情報と、現在地情報と、目的地情報により、目的地までの車両の経路を探索し、この経路上での渋滞予測をおこなう(ステップS1410)。この後、目的地までの経路のリンクデータを生成し(ステップS1411)、サーバB(1302)に送信する(ステップS1411)。
【0089】
この後、サーバA(1301)は、サーバB(1302)から送信される電費予測の処理結果を取得し、この電費予測の処理結果により、表示出力を生成し(ステップS1412)、端末120に送信する(ステップS1412)。
【0090】
サーバB(1302)では、ステップS1420において、サーバA(1301)から送信されたリンクデータに基づき、移動体の目的地までの消費電力を予測し(ステップS1420)、電費予測の結果をサーバA(1301)に送信する(ステップS1421)。
【0091】
以上の処理により、サーバA(1301)は、地域別等に複数台設置され、地域内の端末120との間で情報をやりとりする。サーバB(1302)は、WebAPI等の機能を備えて1台設けられ、複数台のサーバA(1301)との間で情報をやりとりする。このように、サーバを複数台設け、機能を分担する構成とすることにより、各サーバが機能を限定してある機能にだけ特化した処理を高速に実行することができるようになる。端末120は、サーバの台数を意識することなく、相互に通信するサーバA(1301)との間のインターフェースを用意するだけで、必要な表示出力をサーバA(1301)から得ることができる。
【0092】
なお、本実施の形態で説明した表示制御方法は、あらかじめ用意されたプログラムをパーソナル・コンピュータやワークステーションなどのコンピュータで実行することにより実現することができる。このプログラムは、ハードディスク、フレキシブルディスク、CD−ROM、MO、DVDなどのコンピュータで読み取り可能な記録媒体に記録され、コンピュータによって記録媒体から読み出されることによって実行される。またこのプログラムは、インターネットなどのネットワークを介して配布することが可能な伝送媒体であってもよい。
【符号の説明】
【0093】
100 サーバ
101 受信部
102 算出部
103 判定部
104 表示制御部
105 送信部
120 端末
121 取得部
122 送信部
123 受信部
124 表示部
131 通信網
【技術分野】
【0001】
この発明は、電気自動車のバッテリ残量による航続可能な状態を表示する表示制御装置、表示制御方法およびサーバに関する。ただし、この発明の利用は、表示制御装置、表示制御方法およびサーバに限らない。
【背景技術】
【0002】
従来、電気自動車は、バッテリを電力源として走行するため、バッテリの残量を検知し、目的地までの航続が可能かどうかを判断し、報知する技術が開示されている(たとえば、下記特許文献1参照。)。この技術では、目的地を入力することにより、現在のバッテリ残量に基づいて目的地までの(および出発地への往復)航続が可能であるかを文字「往復できます」、あるいは「往復できません」と表示するため、目的地までの航続が可能であるかを知ることができる。
【0003】
また、現在地を中心として現在のバッテリ残量で到達可能な範囲を円で表示する構成の技術が開示されている(たとえば、下記特許文献2参照。)。この技術では、通常走行時における到達可能エリアと、エコノミー走行時における到達可能エリアがそれぞれ円で表示され、現在のバッテリで移動できる範囲を知ることができる。
【0004】
また、現在のバッテリ残量により、目的地までの距離と、走行可能距離とを可視的に報知する技術がある(たとえば、下記特許文献3参照。)。この技術では、現在のバッテリ残量で目的地まで到達不可能な場合には、充電ステーションまで実線で経路を示し、充電後の経路を点線で示す表示をおこなう。また、数値で表示もでき、目的地を設定した場合、目的地までの走行距離と、現在の走行距離とを並べて表示している。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2004−61247号公報
【特許文献2】特開2001−112121号公報
【特許文献3】特開2006−115623号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、上述した従来技術では、目的地へのバッテリの必要量と不足量とを容易に知ることができない。特許文献1の技術では、目的地まで走行可能であるか否かを文字で表示するだけであり、走行ができない場合、どの程度バッテリが不足しているかを把握することができない。
【0007】
また、特許文献2の技術では、走行可能範囲を地図上で表示するため、通常の電気自動車が走行可能な距離(たとえば100km以上)の広域を地図表示しなければ確認することができない。ナビゲーション装置等で現在位置を詳細地図で表示している場合、地図の尺度を数段階、広域に切り替える操作が必要となり煩雑になる。また、地図の縮尺を代えるため、到達距離が直感的に分かりにくい。
【0008】
さらに、特許文献3の技術では、目的地までの距離と、走行可能距離を数字および地図上で表示するが、現在地にて目的地まで到達するにはどの程度バッテリの不足分があるか分からない。また、バッテリの充電可能量がどの程度あるかも分からないため、たとえば、現在地でバッテリの充電をおこなうことで目的地まで到達できるものであるかを判断できない。
【課題を解決するための手段】
【0009】
上述した課題を解決し、目的を達成するため、請求項1の発明にかかる表示制御装置は、移動体の駆動源のバッテリの残量を取得する残量取得部と、前記移動体が目的地まで移動する経路で消費する前記バッテリの消費量を算出する算出部と、前記移動体が前記目的地に到るまでの経路に存在する前記バッテリを補充するための補充装置の位置を取得する位置取得部と、前記残量取得部により取得されたバッテリの残量および前記算出部により算出されたバッテリの消費量に基づき、前記移動体が前記目的地まで航続不可能な場合には、現時点での前記バッテリの残量と共に、前記目的地まで航続するために必要なバッテリの不足分の量をバッテリの量に対応した表示形態で表示させ、前記移動体の現在地から前記目的地までの区間の距離に対応して前記補充装置の位置を表示させる表示制御部と、を備えることを特徴とする。
【0010】
また、請求項2の発明にかかる表示制御方法は、移動体の駆動源のバッテリの残量に基づき、前記移動体が目的地まで航続不可能な場合に表示される表示制御信号を生成する表示制御装置の表示制御方法において、前記移動体の駆動源のバッテリの残量を取得する残量取得工程と、前記移動体が目的地まで移動する経路で消費する前記バッテリの消費量を算出する算出工程と、前記移動体が前記目的地に到るまでの経路に存在する前記バッテリを補充するための補充装置の位置を取得する位置取得工程と、前記残量取得工程により取得されたバッテリの残量および前記算出工程により算出されたバッテリの消費量に基づき、前記移動体が前記目的地まで航続不可能な場合には、現時点での前記バッテリの残量と共に、前記目的地まで航続するために必要なバッテリの不足分の量をバッテリの量に対応した表示形態で表示させ、前記移動体の現在地から前記目的地までの区間の距離に対応して前記補充装置の位置を表示させる表示制御工程と、を含むことを特徴とする。
【0011】
また、請求項3の発明にかかるサーバは、移動体の駆動源のバッテリの残量、前記移動体が目的地まで移動する経路で消費する前記バッテリの消費量、および、前記移動体が前記目的地に到るまでの経路に存在する前記バッテリを補充するための補充装置の位置を受信する受信部と、前記バッテリの残量および前記バッテリの消費量に基づき、前記移動体が前記目的地まで航続不可能な場合には、現時点での前記バッテリの残量と共に、前記目的地まで航続するために必要なバッテリの不足分の量をバッテリの量に対応した表示形態で表示させ、前記移動体の現在地から前記目的地までの区間の距離に対応して前記補充装置の位置を表示させる表示出力を制御する表示制御部と、前記表示制御部により制御された表示出力を送信する送信部と、を備えることを特徴とする。
【0012】
また、請求項4の発明にかかる表示制御装置は、目的地まで移動することで消費する移動体の駆動源であるバッテリの消費量を図形にて表示する表示部と、前記移動体の現在地から前記目的地までに消費する前記バッテリの消費量を示す図形を当該バッテリの残量と不足量とに区別した態様で表示させる表示制御部と、を備え、前記表示制御部は、前記バッテリの残量にて到達可能となる位置に存在するバッテリの補充装置を示す図形を、前記区別して表示されるバッテリの残量に対応して表示させることを特徴とする。
【図面の簡単な説明】
【0013】
【図1】実施の形態1にかかる表示制御システムの機能的構成を示すブロック図である。
【図2】表示制御システムによる表示制御処理の手順を示すフローチャートである。
【図3】サーバのハードウェア構成を示すブロック図である。
【図4】航続可能時の表示例を示す図である。
【図5】航続不可能時の表示例を示す図である。
【図6】目的地を設定しない場合の航続可能時の表示例を示す図である。
【図7】航続不可能時の表示例を示す図である。
【図8】経路案内情報とともに航続に関するバーグラフの表示例を示す図である。
【図9】実施の形態2にかかる表示制御システムの機能的構成を示すブロック図である。
【図10】実施の形態3にかかる表示制御システムの機能的構成を示すブロック図である。
【図11】実施の形態4にかかる表示制御システムの機能的構成を示すブロック図である。
【図12】実施の形態5にかかる表示制御装置の機能的構成を示すブロック図である。
【図13】実施の形態6にかかる各部の機能別構成を示す概要図である。
【図14】実施の形態6にかかる処理手順を示すフローチャートである。
【発明を実施するための形態】
【0014】
以下に添付図面を参照して、この発明にかかる表示制御装置、表示制御方法およびサーバの好適な実施の形態を詳細に説明する。以下に説明する表示制御においては、移動体の現在地と、目的地と、バッテリ情報に基づき、目的地までの航続が可能であるか否かを算出し、ユーザに分かりやすく報知する。報知は表示等により、目的地まで到達できる場合と、到達できない場合とで異なる色等を用いてユーザが容易に判別可能にする。また、目的地までの走行について、余ったバッテリ残量、あるいは不足分のバッテリ量についても表示する。
【0015】
(実施の形態1)
図1は、実施の形態1にかかる表示制御システムの機能的構成を示すブロック図である。図1に示す構成例では、移動体(車両)には、端末120が搭載され、移動体(端末)120の外部に設けられたサーバ100との間で情報を通信によりやりとりする構成である。
【0016】
サーバ100には、受信部101と、算出部102と、判定部103と、表示制御部104と、送信部105と、を備える。また、端末120には、取得部121と、送信部122と、受信部123と、表示部124と、を備える。
【0017】
(端末の構成)
端末120の取得部121は、現在地情報と、目的地情報と、バッテリ情報をそれぞれ取得する。現在地情報と、目的地情報はそれぞれの位置情報、たとえば、緯度経度であり、GPS等により取得する。バッテリ情報は、移動体のバッテリの最大充電容量と、現在のバッテリ残量を検出する。これらの情報は、移動体内のエレクトロニックコントロールユニット(ECU:Electronic Control Unit)を介し、たとえばCAN(Controller Area Network)など通信プロトコルによって動作する車内通信ネットワーク(以下、単にCANとする)から取得することができる。
【0018】
送信部122は、取得部121で取得した現在地情報と、目的地情報と、バッテリ情報を通信網131を介してサーバ100に送信する。また、受信部123は、通信網131を介してサーバ100からバッテリ走行情報を受信する。バッテリ走行情報とは、現在のバッテリ残量で目的地まで航続可能であるか否か、および航続可能である場合におけるバッテリ残量、または航続不可能である場合に不足分のバッテリ量、その他の情報からなる。
【0019】
受信部123を介して受信したバッテリ走行情報は、表示部124に表示され、ユーザは、表示された内容により、目的地まで航続可能であるか、および航続可能である場合におけるバッテリ残量、または航続不可能である場合に不足分のバッテリ量、その他の情報を得ることができる。
【0020】
(サーバの構成)
サーバの受信部101は、端末120の送信部122から送信された現在地情報と、目的地情報と、バッテリ情報を受信し、算出部102に出力する。算出部102は、現在地情報と、目的地情報と、バッテリ情報とに基づき、現在のバッテリ残量で航続可能な距離を算出する。この際、算出部102は、地図情報を用いて、現在地から目的地方向に対して航続可能な範囲の複数の経路を探索する。
【0021】
判定部103は、算出部102で算出された、航続可能な距離が目的地まで達するか否かを判定する。判定の結果、航続可能な距離が目的地まで達する場合には、目的地までに消費するバッテリ量と、目的地到達後のバッテリの残量を合わせて出力する。航続可能な距離が目的地まで達することができない場合には、バッテリを全て消費したときの地点と、この地点から目的地までの不足分のバッテリ量を合わせて出力する。
【0022】
表示制御部104は、判定部103による判定の結果、航続可能な距離が目的地まで達するか否かにより表示内容を異ならせて表示する表示信号を出力する。到達可能な場合には、到達可能なことが一目で分かるバーグラフ表示をおこなう。この際、バーグラフは、目的地までに消費するバッテリ量と、目的地到達後のバッテリの残量とで区切った表示信号を出力する。
【0023】
一方、到達不可能な場合には、到達不可能なことを一目で分かる色等を用いたバーグラフ表示により、ユーザに対し到達不可能であることを直感的に報知する。この際、バーグラフは、バッテリを全て消費したときの地点と、この地点から目的地までの不足分のバッテリ量を区切った表示信号を出力する。
【0024】
送信部105は、表示制御部104から出力された表示信号を端末120に送信する。これにより、上記の端末120では、サーバ100側で表示制御された表示信号を受信し、表示部124上に表示出力できる。
【0025】
(表示制御処理内容について)
図2は、表示制御システムによる表示制御処理の手順を示すフローチャートである。はじめに、端末120の取得部121は、車両に設定された現在地情報と、目的地情報を取得する(ステップS201)。つぎに、車両のバッテリ情報を取得する(ステップS202)。このバッテリ情報は、バッテリの最大充電容量と、現在のバッテリ残量である。
【0026】
これらステップS201,ステップS202で取得された情報は、端末120の送信部122から通信網131を介してサーバ100に送信される。サーバ100の受信部101は、端末120から送信された情報を受信する。算出部102は、受信した現在地情報と、目的地情報と、バッテリ情報とに基づき、航続可能距離を算出する(ステップS203)。
【0027】
この際、算出部102は、取得した地図データに含まれるリンク情報に基づいて、移動体の目的地までの経路を探索する。リンクとは、道路種別や速度帯域が変化する地点、都道府県や府市町村の境界など地域が変わる地点などで区切られた区間である。リンク情報は、リンクごと設定されている。リンク情報には、リンクの位置や高度、リンクの距離、移動体の移動時間などが含まれる。
【0028】
具体的には、算出部102は、たとえば、移動体の出発地から目的地までの隣り合うリンクを接続して構成した1経路を、リンクの接続を種々変更して複数探索する。このとき、各リンクのリンク情報を、経路探索時の重み付けとして用いてもよい。重み付けに応じて時間優先、距離優先、消費エネルギー優先の経路探索をおこなうことができる。
【0029】
たとえば、経路探索条件を時間優先とした場合、最短で移動可能な各リンクどうしを接続して構成した1経路を探索する。また、移動体の出発地から目的地までのリンクコストをリンク情報ごとに積算する。そして、各リンクにおけるリンク情報をリンクコストとして経路探索をおこなう。各リンク情報の積算コストに応じて、各リンク情報の重み付けを変化させてもよい。
【0030】
つぎに、判定部103は、算出部102で算出された、航続可能な距離が目的地まで航続可能であるか否かを判定する(ステップS204)。そして、表示制御部104は判定部103の判定の結果、目的地まで航続可能な場合には(ステップS204:Yes)、到達可能なことを示す表示出力をおこなう(第1の表示形態)。また、目的地までに消費するバッテリ量と、目的地到達後のバッテリの残量を合わせて出力し(ステップS205)、一連の処理を終了する。
【0031】
一方、表示制御部104は、判定部103の判定の結果、目的地まで航続不可能な場合には(ステップS204:No)、到達不可能なことを示す表示出力をおこなう(第2の表示形態)。また、バッテリを全て消費したときの地点と、この地点から目的地までの不足分のバッテリ量を合わせて出力し(ステップS206)、一連の処理を終了する。
【0032】
上記表示制御部104による表示出力は、送信部105を介して端末120の受信部123により受信され、表示部124に表示されユーザに報知される。
【0033】
以上説明したように、実施の形態にかかる表示制御システムは、移動体が現在のバッテリで目的地まで航続可能であるか否かを判断し、航続可能であるか否かに応じて異なる表示内容をユーザに表示することにより、ユーザは直感的に目的地までの航続が可能かどうかを判断できる。また、航続可能であれば、バッテリ残量を合わせて表示するため、余裕がある状態をあらかじめ認識して走行できる。航続不可能であればどの程度バッテリが不足しているのかが表示されるため、バッテリの不足分を考慮した航行が可能となる。
【実施例1】
【0034】
(サーバ100のハードウェア構成)
つぎに、サーバ100のハードウェア構成について説明する。図3は、サーバのハードウェア構成を示すブロック図である。図3において、サーバ100は、CPU301、ROM302、RAM303、磁気ディスクドライブ304、磁気ディスク305、光ディスクドライブ306、光ディスク307、入力デバイス311、通信I/F315を備えている。各構成部301〜315は、バス320によってそれぞれ接続されている。
【0035】
まず、CPU301は、サーバ100の全体の制御を司る。ROM302は、上述した表示制御などのプログラムを記録している。また、RAM303は、CPU301のワークエリアとして使用される。すなわち、CPU301は、RAM303をワークエリアとして使用しながら、ROM302に記録された各種プログラムを実行することによって、サーバ100の全体の制御を司る。
【0036】
磁気ディスクドライブ304は、CPU301の制御にしたがって磁気ディスク305に対するデータの読み取り/書き込みを制御する。磁気ディスク305は、磁気ディスクドライブ304の制御で書き込まれたデータを記録する。磁気ディスク305としては、たとえば、HD(ハードディスク)やFD(フレキシブルディスク)を用いることができる。
【0037】
また、光ディスクドライブ306は、CPU301の制御にしたがって光ディスク307に対するデータの読み取り/書き込みを制御する。光ディスク307は、光ディスクドライブ306の制御にしたがってデータが読み出される着脱自在な記録媒体である。光ディスク307は、書き込み可能な記録媒体を利用することもできる。着脱可能な記録媒体として、光ディスク307のほか、MO、メモリカードなどを用いることができる。
【0038】
磁気ディスク305および光ディスク307に記録される情報の一例としては、地図データや各リンクにおける位置情報や高度などのリンク情報が挙げられる。地図データは、経路探索処理や経路誘導処理に用いられ、建物、河川、地表面などの地物(フィーチャ)をあらわす背景データ、道路の形状をリンクやノードなどであらわす道路形状データなどを含んでいる。
【0039】
入力デバイス311は、文字、数値、各種指示などの入力のための複数のキーを備えたリモコン、キーボード、タッチパネルなどが挙げられる。入力デバイス311は、リモコン、キーボード、タッチパネルのうちいずれか1つの形態によって実現されてもよいが、複数の形態によって実現することも可能である。
【0040】
通信I/F315は、有線または無線を介してネットワークに接続され、サーバ100およびCPU301のインターフェースとして機能する。ネットワークとして機能する通信網には、公衆回線網や携帯電話網、DSRC(Dedicated Short Range Communication)、LAN、WANなどがある。通信I/F315は、たとえば、公衆回線用接続モジュールなどである。
【0041】
図1に示した取得部121、算出部102、判定部103、表示制御部104は、上述したROM302、RAM303、磁気ディスク305、光ディスク307などに記録されたプログラムやデータを用いて、CPU301が所定のプログラムを実行することによってその機能を実現する。
【0042】
(端末120のハードウェア構成)
端末120のハードウェア構成は、図3に示したサーバ100のハードウェア構成同様に、CPU、ROM、RAMを備え、CPUが、RAMをワークエリアとして使用しながら、ROMに記録された各種プログラムを実行することによって、端末120の全体の制御を司る。
【0043】
また、各種センサとしてGPS機能を有して、現在地と、目的地の位置情報を取得できる。端末120に地図機能を有する構成とすれば、地図上で目的地近傍を表示させて目的地の位置情報を容易に取得することができる。また、各種センサとしては、移動体のバッテリの最大充電容量と、現在のバッテリ残量を取得する。このほか、通信I/Fを備えて外部のサーバ100と通信により情報の送受をおこなう。
【0044】
また、端末120には、入力デバイスを備え、各種操作入力が可能である。このほか、磁気ディスクドライブ、磁気ディスク、光ディスクドライブ、光ディスク等を備えて、各種情報を取得することもできる。
【0045】
つぎに、表示出力の一例について説明する。図4は、航続可能時の表示例を示す図である。判定部103による判定の結果、表示制御部104は、目的地まで航続可能な場合の表示例を示す。この場合、端末120の表示部124上には、到達可能なことを示す表示出力がなされる。
【0046】
図4に示すように、この表示は、バーグラフ(棒グラフ、またはドット)により表示される。そして、バーグラフの長さは、バッテリの最大充電容量L1として表示する。また、現在の充電容量L2を一端(図の左端)から所定長さで表示する。図の左端は現在地aに相当する。最大充電容量L1に対する、現在の充電容量L2により、バッテリがあとどの程度充電できる状態であるかを知ることができる。
【0047】
また、現在の充電容量L2のうち、目的地bまでの航行に消費するバッテリの予想消費量L3を現在地aを起点として目的地bまでの間の所定の長さで表示する。目的地bの位置からは、バッテリの残量L4を走行可能距離dまでの間の所定の長さで表示する。図4に示す表示は、目的地まで航続可能な場合の表示例であるため、バーグラフとして表示する予想消費量L3と、バッテリの残量L4は、いずれも目的地bまでの航続が可能であることを示す色、たとえば、予想消費量L3は水色、バッテリの残量L4は緑色など、安心した航続が可能であることを示す色を用いて表示する。
【0048】
これにより、ユーザは、現在の充電容量L2で目的地bまでの航続が可能なことを表示されている色により一目で安心して把握、認識できるようになる。加えて、目的地bに到着後であっても、バッテリの残量L4の長さの表示によって、バッテリの残量がどの程度であるか一目で把握できるようになる。
【0049】
図5は、航続不可能時の表示例を示す図である。判定部103による判定の結果、目的地まで航続不可能な場合の表示例を示す。この場合、端末120の表示部124上には、到達不可能なことを示す表示出力がなされる。
【0050】
図5に示すように、航続不可能な場合においても、バーグラフの長さは、バッテリの最大充電容量L1である。また、現在の充電容量L2を一端(図の左端)から所定長さで表示する。図の左端は現在地aに相当する。また、現在の充電容量L2の他端(図の右端)が走行可能距離dとなる。最大充電容量L1に対する、現在の充電容量L2により、バッテリがあとどの程度充電できる状態であるかを知ることができる。
【0051】
そして、目的地bまでの航行について、現在の充電容量L2(走行可能距離d)から先(右側)の目的地bまでの区間について、バッテリ不足分L5であるとして所定の長さで表示する。図5に示す表示において、バーグラフとして表示する現在の充電容量L2については、たとえば、水色など、安心した航続が可能であることを示す色を用いて表示する。
【0052】
しかし、目的地まで航続不可能な場合の表示例であるため、バッテリ不足分L5については、目的地bまでの航行に不足した分であるため、この部分は、赤色など、バッテリが不足していることを容易に知らせることができる目立つ色を用いて表示する。
【0053】
これにより、ユーザは、現在の充電容量L2で目的地bまでの航続が不可能なことを表示されている色により直ぐに把握、認識できるようになる。加えて、目的地bまでの航続にあとどれくらいバッテリ容量が必要であるか、バッテリ不足分L5の長さの表示によって、一目で把握できるようになる。これにより、目的地までの航続中にバッテリ充電が必要であることをあらかじめユーザが把握した状態で出発できるようになる。以上が第一表示制御信号に基づく画像表示である。
【0054】
また、図中e点は、それぞれバッテリを補充するための補充装置である充電スタンドの所在位置をポイントで示している。この充電スタンドの所在位置は、補充位置取得手段が現在地から目的地までの経路探索時に参照した地図情報に基づき、取得する。サーバ100は、取得した充電スタンドの所在位置をこのバーグラフ上における現在地aから目的地bまでの区間の距離に対応して表示させている。この画像は、上述した第一表示制御信号とともに生成される第二表示制御信号に基づいて表示される。これにより、ユーザは、充電スタンドの位置eの情報を得て、目的地bまでの航続が可能であることを知ることができ、安心して出発できるようになる。
【0055】
図5の表示例では、現在の充電容量L2の領域にだけ充電スタンドの位置eを表示させている。この表示によれば、現在のバッテリ残量で充電可能な充電スタンドでの充電を促すことができるようになる。なお、充電スタンドでの充電により、現在の充電容量L2が延びた場合であっても、目的地bまでの間における現在の充電容量L2のバーの範囲内での充電スタンドの位置eを表示させることで、常に充電スタンドの位置eを把握でき、次回以降の充電に関する情報を得ることができ、目的地bまで安心して航続できるようになる。
【実施例2】
【0056】
つぎに、目的地を設定しない場合の表示例について説明する。図6は、目的地を設定しない場合の航続可能時の表示例を示す図である。
【0057】
算出部102は、目的地を設定しない場合、ホーム位置が設定されていれば、ホーム位置を目的地とし、判定部103は、このホーム位置まで航続可能であるか否かを判定する。このため、目的地が取得できない場合、算出部102は、取得部121に対し、ホーム位置の設定を要求し、受け取る構成としておく。このホーム位置は、自宅の車庫など移動体が帰車する場所であり、あらかじめ端末120にホーム位置の緯度経度等を設定しておけばよい。
【0058】
バーグラフの長さは、バッテリの最大充電容量L1として表示し、現在の充電容量L2を一端(図の左端)から所定長さで表示する。図の左端は現在地aに相当する。最大充電容量L1に対する、現在の充電容量L2により、バッテリがあとどの程度充電できる状態であるかを知ることができる。
【0059】
そして、現在の充電容量L2のうち、ホーム位置cまでの航行に消費するバッテリの予想消費量L3を現在地aを起点としてホーム位置cまでの間の所定の長さで表示する。ホーム位置cの位置からは、バッテリの残量L4を走行可能距離dまでの間の所定の長さで表示する。図6に示す表示は、目的地まで航続可能な場合の表示例であるため、バーグラフとして表示する予想消費量L3と、バッテリの残量L4は、いずれもホーム位置cまでの航続が可能であることを示す色、たとえば、予想消費量L3は水色、バッテリの残量L4は緑色など、安心した航続が可能であることを示す色を用いて表示する。
【0060】
これにより、自宅等への帰宅時に目的地bを設定しないとき、ホーム位置cを目的地として設定するため、ユーザは、現在の充電容量L2でホーム位置cまでの航続が可能なことを表示されている色により一目で安心して把握、認識できるようになる。ホーム位置cには通常、充電設備を有しており、ホーム位置cで充電することができる。加えて、ホーム位置cに到着後であっても、バッテリの残量L4の長さの表示によって、バッテリの残量がどの程度であるか一目で把握できるようになる。
【0061】
図7は、航続不可能時の表示例を示す図である。判定部103による判定の結果、ホーム位置まで航続不可能な場合の表示例を示す。この場合、端末120の表示部124上には、到達不可能なことを示す表示出力がなされる。
【0062】
図7に示すように、航続不可能な場合においても、バーグラフの長さは、バッテリの最大充電容量L1である。また、現在の充電容量L2を一端(図の左端)から所定長さで表示する。図の左端は現在地aに相当する。また、現在の充電容量L2の他端(図の右端)が走行可能距離dとなる。最大充電容量L1に対する、現在の充電容量L2により、バッテリがあとどの程度充電できる状態であるかを知ることができる。
【0063】
そして、ホーム位置cまでの航行について、現在の充電容量L2(走行可能距離d)から先(右側)のホーム位置cまでの区間について、バッテリ不足分L5であるとして所定の長さで表示する。図7に示す表示のうち、バーグラフとして表示する現在の充電容量L2については、たとえば、水色など、安心した航続が可能であることを示す色を用いて表示する。
【0064】
しかし、目的地まで航続不可能な場合の表示例であるため、バッテリ不足分L5については、ホーム位置cまでの航行に不足した分であるため、この部分は、赤色など、バッテリが不足していることを容易に知らせる色を用いて表示する。
【0065】
これにより、ユーザは、現在の充電容量L2でホーム位置cまでの航続が不可能なことを表示されている色により直ぐに把握、認識できるようになる。加えて、ホーム位置cまでの航続にあとどれくらいバッテリ容量が必要であるか、バッテリ不足分L5の長さの表示によって、一目で把握できるようになる。これにより、目的地までの航続中にバッテリ充電が必要であることをあらかじめユーザが把握した状態で出発できるようになる。
【0066】
また、この表示例においても、図中e点は、それぞれ充電スタンドの所在位置をポイントで示している。充電スタンドの所在位置をこのバーグラフ上における現在地aからホーム位置cまでの区間の距離に対応して表示させている。これにより、ユーザは、充電スタンドの位置eの情報を得て、ホーム位置cまでの航続が可能であることを知ることができ、安心して出発できるようになる。また、現在の充電容量L2の領域において、表示されている充電スタンドの位置eにより、ホーム位置cまで安心して航続できるようになる。
【実施例3】
【0067】
つぎに、上述したバークラフの長さの算出方法について説明する。図4に示した例に基づき説明する。バーグラフ全体の長さ(100%)は、最大充電容量L1に基づき設定する。また、最大充電量P1、現在の充電容量P2、予想消費電力P3とする。
これにより、目的地bまでのバーの長さL3=L1×P3/P1
現在の充電容量L2(航行可能な)の長さL2=L1×P2/P1に基づき得ることができる。
【実施例4】
【0068】
つぎに、上述したバーグラフを経路案内情報とともに表示する例について説明する。図8は、経路案内情報とともに航続に関するバーグラフの表示例を示す図である。経路案内情報は、端末120あるいはサーバ100が現在地と目的地の情報に基づき探索した経路として、端末120の表示部124に表示させる。この場合、端末120がたとえば、ナビゲーション機能を有しており、経路探索および経路案内の機能を有していれば、これら経路探索および経路案内の情報をサーバ100に送信する必要はない。
【0069】
そして、端末120は、端末120内部で生成した経路探索および経路案内の情報800を表示部124に表示させる。これらの情報800は、図8に示す現在地801、目的地までの距離802、所要時間803、到着時刻804、目的地805、つぎの交差点での進行方向806、以後の複数の交差点の進行方向807等からなる。
【0070】
そして、上述したバーグラフ表示にかかる表示信号の生成をサーバ100が実行し、端末120は、サーバ100からの表示出力をバーグラフ810として情報800の一部に重ねて表示する。重ねる場合でも、情報800の空き表示領域をあらかじめ設けておいたり、空いている箇所に表示させるようにする。これにより、経路探索および経路案内の情報800と共に、バーグラフ810を見ることができる。バーグラフ810は、図示のように、表示領域の下部等に、場所を取らず、少ないスペースで効率的に複数の情報を表示することができるため、表示部124の表示面積が小さくても視認性を高めることができる。なお、図8に示すバーグラフ810は、航続可能時の表示であるが、航続不可能時についても同様の箇所に表示される。
【0071】
(実施の形態2)
つぎに、本発明の実施の形態2について説明する。図9は、実施の形態2にかかる表示制御システムの機能的構成を示すブロック図である。図9に示す構成例では、実施の形態1で1箇所に配置されていたサーバ100を2箇所のサーバA(901),サーバB(902)に分けて分散処理する構成である。たとえば、サーバA(901)は、地域別に設けられ、端末120との間で情報をやりとりする。サーバB(902)は、たとえば1箇所に設けられ、複数のサーバA(901)からアクセスされ、バーグラフの表示だけに特化した処理をおこなう。
【0072】
端末120の構成は、実施の形態1(図1)と同様であり、サーバA(901)との間で通信をおこなう。
【0073】
サーバA(901)は、算出部102と、判定部103の構成を有する。そして、受信部101、および送信部105は端末120との間で通信をおこなう。
【0074】
サーバB(902)は、図示のように、表示制御部104の構成を有する。そして、受信部101、および送信部105は、サーバA(901)との間で通信をおこなう。このように、サーバA(901)と、サーバB(902)は、異なる機能別のサーバで構成することもできる。
【0075】
(実施の形態3)
図10は、実施の形態3にかかる表示制御システムの機能的構成を示すブロック図である。図10に示す構成例は、2箇所のサーバA(901),サーバB(902)の構成は、実施の形態2(図9)と同様である。また、端末120の構成についても実施の形態1(図1)および実施の形態2(図9)と同様である。
【0076】
サーバA(901)は、端末120の取得部121が取得した情報を受信部101が受信開始し、算出部102と、判定部103の構成を有する。そして、送信部105は、サーバB(902)に判定結果を出力する。
【0077】
サーバB(902)は、受信部101を介して、サーバA(901)の判定結果を受信し、表示制御部104の構成を有する。そして、送信部105を介して、表示出力を端末120に送信する。端末120は、受信部123によりサーバB(902)から表示出力を受信し、表示部124に表示出力する。このように、サーバA(901)で処理した情報をサーバB(902)に出力し、サーバB(902)から端末120に出力する構成としてもよい。このように、サーバA(901)とサーバB(902)を異なる機能別のサーバで構成して用いることができる。
【0078】
(実施の形態4)
図11は、実施の形態4にかかる表示制御システムの機能的構成を示すブロック図である。図11に示す構成例では、端末120は、取得部121と、算出部102と、判定部103と表示部124とを備えている。また、送信部122は、判定部103の判定結果をサーバ100に送信し、受信部123は、サーバ100の表示制御部104の表示出力を受信し表示部124に表示する。
【0079】
サーバ100は、受信部101が端末120の判定部103の判定結果を受信し、表示制御部104により表示出力を生成し、送信部105に出力する。送信部105は、表示出力を端末120に送信する。このように、表示出力を生成する機能を外部のサーバ100を用いる構成とすることもできる。
【0080】
(実施の形態5)
図12は、実施の形態5にかかる表示制御装置の機能的構成を示すブロック図である。図12に示す構成例では、外部のサーバを用いず端末120に全ての機能を備えている。端末120は、たとえば、移動体に搭載されたナビゲーション装置を用いて構成することができる。この実施の形態5によれば、外部のサーバとの通信をおこなわずに、移動体内の端末120だけで全ての処理を実行できるようになる。
【0081】
(実施の形態6)
図13は、実施の形態6にかかる各部の機能別構成を示す概要図である。この実施の形態6では、一部の処理に外部の2つのサーバA(1301)と、サーバB(1302)を用いる。
【0082】
サーバA(1301)では、現在地と目的地の情報に基づき、経路探索および経路案内に特化した処理をおこなう。そして、サーバA(1301)は、サーバB(1302)に対して経路上のノード間のリンク情報と、バッテリ情報を送信する。サーバB(1302)では、リンク情報と、バッテリ情報に基づき、目的地までの経路に必要な消費電力(電費予測)をおこなう。
【0083】
サーバB(1302)は、たとえば、WebAPI(Application Programming Interface)であり、電費計算だけに特化した処理をおこない、電費予測の結果をサーバA(1301)に応答する。そして、サーバA(1301)は、目的地まで走行可能であるかバーグラフを生成し、端末120に送信する。
【0084】
実施の形態6の構成は、上述した実施の形態2(図9)、あるいは実施の形態3(図10)に示したように分離された2台のサーバを用いて処理機能を分担する構成に相当する。そして、移動体に位置する端末120は、上述した実施の形態で説明した取得部121と、送信部122と、受信部123と、表示部124の機能を有する。サーバA(1301)は、上述した実施の形態で説明した受信部101と、算出部102と、表示制御部104と、送信部105の機能を有する。算出部102は、上述したリンク情報を算出し、表示制御部104は、表示制御の表示出力(表示信号)を生成する。サーバB(1302)は、上述した実施の形態で説明した受信部101と、判定部103と、送信部105の機能を有する。判定部103は、電費予測の処理をおこない、目的地まで到達できるか否かを判定する。
【0085】
図14は、実施の形態6にかかる処理手順を示すフローチャートである。移動体の端末120でおこなう処理と、サーバA(1301)でおこなう処理と、サーバB(1302)でおこなう処理とをそれぞれ記載してある。端末120では、車両の移動後、走行終了までの間で以下の処理を実行し(ステップS1401:No)、走行終了となれば処理を終了する(ステップS1401:Yes)。
【0086】
はじめに、取得部121により、バッテリ情報を取得する(ステップS1402)。つぎに、取得部121により、現在地情報と、目的地情報を取得する(ステップS1403)。これら取得した情報は、送信部からサーバA(1301)に送信される(ステップS1404)。
【0087】
この後、端末120は、受信部によりサーバA(1301)から送信される表示信号を取得し(ステップS1405)、表示部124上にバーグラフ表示をおこなう(ステップS1406)。
【0088】
サーバA(1301)では、ステップS1404において、端末120から送信されたバッテリ情報と、現在地情報と、目的地情報により、目的地までの車両の経路を探索し、この経路上での渋滞予測をおこなう(ステップS1410)。この後、目的地までの経路のリンクデータを生成し(ステップS1411)、サーバB(1302)に送信する(ステップS1411)。
【0089】
この後、サーバA(1301)は、サーバB(1302)から送信される電費予測の処理結果を取得し、この電費予測の処理結果により、表示出力を生成し(ステップS1412)、端末120に送信する(ステップS1412)。
【0090】
サーバB(1302)では、ステップS1420において、サーバA(1301)から送信されたリンクデータに基づき、移動体の目的地までの消費電力を予測し(ステップS1420)、電費予測の結果をサーバA(1301)に送信する(ステップS1421)。
【0091】
以上の処理により、サーバA(1301)は、地域別等に複数台設置され、地域内の端末120との間で情報をやりとりする。サーバB(1302)は、WebAPI等の機能を備えて1台設けられ、複数台のサーバA(1301)との間で情報をやりとりする。このように、サーバを複数台設け、機能を分担する構成とすることにより、各サーバが機能を限定してある機能にだけ特化した処理を高速に実行することができるようになる。端末120は、サーバの台数を意識することなく、相互に通信するサーバA(1301)との間のインターフェースを用意するだけで、必要な表示出力をサーバA(1301)から得ることができる。
【0092】
なお、本実施の形態で説明した表示制御方法は、あらかじめ用意されたプログラムをパーソナル・コンピュータやワークステーションなどのコンピュータで実行することにより実現することができる。このプログラムは、ハードディスク、フレキシブルディスク、CD−ROM、MO、DVDなどのコンピュータで読み取り可能な記録媒体に記録され、コンピュータによって記録媒体から読み出されることによって実行される。またこのプログラムは、インターネットなどのネットワークを介して配布することが可能な伝送媒体であってもよい。
【符号の説明】
【0093】
100 サーバ
101 受信部
102 算出部
103 判定部
104 表示制御部
105 送信部
120 端末
121 取得部
122 送信部
123 受信部
124 表示部
131 通信網
【特許請求の範囲】
【請求項1】
移動体の駆動源のバッテリの残量を取得する残量取得部と、
前記移動体が目的地まで移動する経路で消費する前記バッテリの消費量を算出する算出部と、
前記移動体が前記目的地に到るまでの経路に存在する前記バッテリを補充するための補充装置の位置を取得する位置取得部と、
前記残量取得部により取得されたバッテリの残量および前記算出部により算出されたバッテリの消費量に基づき、前記移動体が前記目的地まで航続不可能な場合には、現時点での前記バッテリの残量と共に、前記目的地まで航続するために必要なバッテリの不足分の量をバッテリの量に対応した表示形態で表示させ、前記移動体の現在地から前記目的地までの区間の距離に対応して前記補充装置の位置を表示させる表示制御部と、
を備えることを特徴とする表示制御装置。
【請求項2】
移動体の駆動源のバッテリの残量に基づき、前記移動体が目的地まで航続不可能な場合に表示される表示制御信号を生成する表示制御装置の表示制御方法において、
前記移動体の駆動源のバッテリの残量を取得する残量取得工程と、
前記移動体が目的地まで移動する経路で消費する前記バッテリの消費量を算出する算出工程と、
前記移動体が前記目的地に到るまでの経路に存在する前記バッテリを補充するための補充装置の位置を取得する位置取得工程と、
前記残量取得工程により取得されたバッテリの残量および前記算出工程により算出されたバッテリの消費量に基づき、前記移動体が前記目的地まで航続不可能な場合には、現時点での前記バッテリの残量と共に、前記目的地まで航続するために必要なバッテリの不足分の量をバッテリの量に対応した表示形態で表示させ、前記移動体の現在地から前記目的地までの区間の距離に対応して前記補充装置の位置を表示させる表示制御工程と、
を含むことを特徴とする表示制御方法。
【請求項3】
移動体の駆動源のバッテリの残量、前記移動体が目的地まで移動する経路で消費する前記バッテリの消費量、および、前記移動体が前記目的地に到るまでの経路に存在する前記バッテリを補充するための補充装置の位置を受信する受信部と、
前記バッテリの残量および前記バッテリの消費量に基づき、前記移動体が前記目的地まで航続不可能な場合には、現時点での前記バッテリの残量と共に、前記目的地まで航続するために必要なバッテリの不足分の量をバッテリの量に対応した表示形態で表示させ、前記移動体の現在地から前記目的地までの区間の距離に対応して前記補充装置の位置を表示させる表示出力を制御する表示制御部と、
前記表示制御部により制御された表示出力を送信する送信部と、
を備えることを特徴とするサーバ。
【請求項4】
目的地まで移動することで消費する移動体の駆動源であるバッテリの消費量を図形にて表示する表示部と、
前記移動体の現在地から前記目的地までに消費する前記バッテリの消費量を示す図形を当該バッテリの残量と不足量とに区別した態様で表示させる表示制御部と、
を備え、
前記表示制御部は、前記バッテリの残量にて到達可能となる位置に存在するバッテリの補充装置を示す図形を、前記区別して表示されるバッテリの残量に対応して表示させることを特徴とする表示制御装置。
【請求項1】
移動体の駆動源のバッテリの残量を取得する残量取得部と、
前記移動体が目的地まで移動する経路で消費する前記バッテリの消費量を算出する算出部と、
前記移動体が前記目的地に到るまでの経路に存在する前記バッテリを補充するための補充装置の位置を取得する位置取得部と、
前記残量取得部により取得されたバッテリの残量および前記算出部により算出されたバッテリの消費量に基づき、前記移動体が前記目的地まで航続不可能な場合には、現時点での前記バッテリの残量と共に、前記目的地まで航続するために必要なバッテリの不足分の量をバッテリの量に対応した表示形態で表示させ、前記移動体の現在地から前記目的地までの区間の距離に対応して前記補充装置の位置を表示させる表示制御部と、
を備えることを特徴とする表示制御装置。
【請求項2】
移動体の駆動源のバッテリの残量に基づき、前記移動体が目的地まで航続不可能な場合に表示される表示制御信号を生成する表示制御装置の表示制御方法において、
前記移動体の駆動源のバッテリの残量を取得する残量取得工程と、
前記移動体が目的地まで移動する経路で消費する前記バッテリの消費量を算出する算出工程と、
前記移動体が前記目的地に到るまでの経路に存在する前記バッテリを補充するための補充装置の位置を取得する位置取得工程と、
前記残量取得工程により取得されたバッテリの残量および前記算出工程により算出されたバッテリの消費量に基づき、前記移動体が前記目的地まで航続不可能な場合には、現時点での前記バッテリの残量と共に、前記目的地まで航続するために必要なバッテリの不足分の量をバッテリの量に対応した表示形態で表示させ、前記移動体の現在地から前記目的地までの区間の距離に対応して前記補充装置の位置を表示させる表示制御工程と、
を含むことを特徴とする表示制御方法。
【請求項3】
移動体の駆動源のバッテリの残量、前記移動体が目的地まで移動する経路で消費する前記バッテリの消費量、および、前記移動体が前記目的地に到るまでの経路に存在する前記バッテリを補充するための補充装置の位置を受信する受信部と、
前記バッテリの残量および前記バッテリの消費量に基づき、前記移動体が前記目的地まで航続不可能な場合には、現時点での前記バッテリの残量と共に、前記目的地まで航続するために必要なバッテリの不足分の量をバッテリの量に対応した表示形態で表示させ、前記移動体の現在地から前記目的地までの区間の距離に対応して前記補充装置の位置を表示させる表示出力を制御する表示制御部と、
前記表示制御部により制御された表示出力を送信する送信部と、
を備えることを特徴とするサーバ。
【請求項4】
目的地まで移動することで消費する移動体の駆動源であるバッテリの消費量を図形にて表示する表示部と、
前記移動体の現在地から前記目的地までに消費する前記バッテリの消費量を示す図形を当該バッテリの残量と不足量とに区別した態様で表示させる表示制御部と、
を備え、
前記表示制御部は、前記バッテリの残量にて到達可能となる位置に存在するバッテリの補充装置を示す図形を、前記区別して表示されるバッテリの残量に対応して表示させることを特徴とする表示制御装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【公開番号】特開2012−211888(P2012−211888A)
【公開日】平成24年11月1日(2012.11.1)
【国際特許分類】
【出願番号】特願2011−269409(P2011−269409)
【出願日】平成23年12月8日(2011.12.8)
【分割の表示】特願2011−538196(P2011−538196)の分割
【原出願日】平成23年3月30日(2011.3.30)
【出願人】(000005016)パイオニア株式会社 (3,620)
【Fターム(参考)】
【公開日】平成24年11月1日(2012.11.1)
【国際特許分類】
【出願日】平成23年12月8日(2011.12.8)
【分割の表示】特願2011−538196(P2011−538196)の分割
【原出願日】平成23年3月30日(2011.3.30)
【出願人】(000005016)パイオニア株式会社 (3,620)
【Fターム(参考)】
[ Back to top ]