
表示制御装置、表示制御方法および表示制御プログラム
【課題】車両マークの表示が不自然となることを防止する。
【解決手段】車両の現在位置と車速とを示す車両情報を取得し、前記車両の位置を示す車両マークと地図とを表示部に表示させ、前記車両による前記分岐地点の通過前から通過後にわたる第1期間において、前記地図に対する前記車両マークの移動速度を前記車速に対応する移動速度よりも小さくし、前記第1期間の後の第2期間において、前記地図に対する前記車両マークの移動速度を前記車速に対応する移動速度よりも大きくする。
【解決手段】車両の現在位置と車速とを示す車両情報を取得し、前記車両の位置を示す車両マークと地図とを表示部に表示させ、前記車両による前記分岐地点の通過前から通過後にわたる第1期間において、前記地図に対する前記車両マークの移動速度を前記車速に対応する移動速度よりも小さくし、前記第1期間の後の第2期間において、前記地図に対する前記車両マークの移動速度を前記車速に対応する移動速度よりも大きくする。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、表示制御装置、表示制御方法および表示制御プログラムに関する。
【背景技術】
【0002】
走行軌跡の形状と相関の高い形状を有する道路を、車両が走行している道路であると特定するマップマッチング技術が知られている(特許文献1、参照。)。また、特許文献1では、本線道路と側道とが並設された区間を車両が走行する場合に、走行軌跡と本線道路との方位差が所定値以上となるまでは車両マークを本線道路上に表示し、車両と本線道路と方位差が所定値以上となったタイミングで車両マークを側道上に表示することが開示されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2008−26032号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1において、車両と本線道路との方位差が所定値以上となったタイミングで、車両マークが地図において本線道路から側道上へと急激に遷移することとなり、車両マークの表示が不自然となるという問題があった。
本発明は、上記課題に鑑みてなされたものであり、分岐地点を走行する場合に車両マークの表示が不自然となることを防止することを目的とする。
【課題を解決するための手段】
【0005】
上記の目的を達成するため、本発明において、第1変速手段は、分岐地点の通過前から通過後にわたる第1期間において、地図に対する車両マークの移動速度を車速に対応する移動速度よりも小さくする。これにより、車両が分岐地点に到達するよりも遅く、地図に示す分岐地点の位置に車両マークを到達させることができる。すなわち、車両が分岐地点に到達してからしばらくの期間は、地図に示す分岐地点の位置に車両マークが到達しない。従って、当該期間において、車両が分岐地点の通過後に走行する走行道路に対応する位置へ車両マークを移動させなくてもよく、車両が分岐地点の通過後に走行する走行道路の特定結果に影響されることなく車両マークを表示することができる。すなわち、車両が分岐地点に到達した後において、車両が分岐地点の通過後に走行する走行道路の特定結果が不安定になる場合であっても、車両マークの表示が不自然となることはない。
【0006】
また、第1期間において車両マークが示す位置に対して現在位置が先行することとなる。車両マークが示す位置に対して現在位置が先行する先行距離は、第1期間において時間が経過するほど増加し、第1期間の終期において最大となる。第2変速手段は、第1期間の後の第2期間において、地図に対する車両マークの移動速度を車速に対応する移動速度よりも大きくする。これにより、第1期間の終期において最大となった先行距離を第2期間において縮小していくことができる。すなわち、第2期間においては、時間の経過とともに、車両マークが示す位置と現在位置とを近づけていくことができ、車両マークが正確に現在位置を示すようにしていくことができる。すなわち、第1期間と第2期間とにおいて車両マークが示す位置に対して現在位置が先行する先行距離が生じるが、それ以外の期間においては車両マークが正確に現在位置を示すようにすることができる。
【0007】
なお、地図に示される分岐地点の位置に車両マークが到達した後においては、車両が分岐地点の通過後に走行する走行道路に対応する位置へ車両マークを移動させる必要性が生じる。車両が分岐地点を通過したにも拘わらず、地図に示される分岐地点の位置にて車両マークが停留すると不自然となるからである。そこで、車両が走行している走行道路を特定する走行道路特定手段を備えさせるとともに、地図に示される分岐地点の位置に車両マークが到達した後においては、現在において特定された走行道路に沿った位置を示すように車両マークを移動させるのが望ましい。ここで、地図に示される分岐地点の位置に車両マークが到達した後では、すでに分岐地点の通過後に車両が前記先行距離だけ走行しているため、車両が分岐地点の通過後に走行する走行道路についての情報が少なくとも前記先行距離に対応する分は得られていることとなる。例えば、走行道路を現在までの走行軌跡に基づいて特定する場合、車両が分岐地点の通過後に走行する走行道路についての走行軌跡が少なくとも前記先行距離の分は得られていることとなり、当該走行軌跡に基づいて走行道路を特定することができる。
【0008】
なお、車速に対応する車両マークの移動速度とは、車速に地図の縮尺を乗算することにより得られる。例えば、車速がV[km/時]で地図の縮尺が1/Hである場合には、車速に対応する車両マークの移動速度はV/H[km/時]に換算できる。ここで、車両情報取得手段は車両の現在位置と車速とを示す車両情報を取得するものであればよく、表示制御装置が現在位置と車速とを計測するセンサ等を備えてもよいし、現在位置と車速とを計測するセンサ等を備えた別の装置から表示制御装置が通信等によって車両情報を取得してもよい。表示制御手段は、表示制御装置が備える表示部、または、他の装置が備える表示部に対して車両マークと地図とを表示可能な情報を出力すればよい。また、地図は、少なくとも分岐地点に接続する道路と分岐地点とが示されるものであればよく、例えば分岐地点に接続する道路と分岐地点とを模式的に図示した模式図であってもよい。車両マークは、地図との相対位置によって車両の位置を示すものであればよく、車両が移動した場合に、車両マークのみが移動してもよいし、地図のみが移動してもよいし、車両マークと地図の双方が移動してもよい。
【0009】
分岐地点は、車両が分岐地点を通過する前に走行する道路を含め3以上の道路が接続する地点であり、分岐地点の通過後に走行可能な道路が2以上接続する地点である。本発明は、分岐地点の通過後に走行する走行道路を特定する確度が低くなる場合に好適であり、分岐地点に接続する道路の形状や接続角度に基づいて本発明を適用するか否かを切り替えてもよい。また、分岐地点に接続する道路の道路属性に応じて本発明を適用するか否かを切り替えてもよい。例えば、極めて低速で走行したり、停止することが予測される道路属性の道路が接続する場合には、運転者が車両マークを注視して現在位置を確認することが想定され、運転者に違和感を与える可能性があるため、本発明を適用しないようにしてもよい。
【0010】
さらに、第1期間は、車両が分岐地点を通過する前の時刻を始期とし、車両が分岐地点を通過した後の時刻を終期とする期間であればよい。一方、第2期間は第1期間の後の期間であればよく、第2期間が第1期間に連続してもよいし、第1期間と第2期間との間に他の期間が介在してもよい。いずれにしても、第2期間が第1期間よりも後であれば、第1期間において生じた先行距離を第2期間において縮小することができる。
また、第1期間と第2期間の始期と終期とは、車両の現在位置や車両マークが示す位置が所定位置となる時刻によって特定されてもよい。この場合、第1期間や第2期間は所定の区間を現在位置や車両マークが示す位置が移動する期間に対応する。
さらに、第1期間と第2期間の始期と終期とは、車両の現在位置と車両マークが示す位置との相対位置が所定の関係となる時刻によって特定されてもよい。例えば、車両の現在位置と車両マークが示す位置とが所定距離よりも離間した時刻や、所定距離よりも接近した時刻を第1期間と第2期間の始期と終期としてもよい。
さらに、第1期間と第2期間の始期と終期とは、所定の基準時刻から所定時間経過した時刻であってもよい。例えば、第1期間の始期を基準時刻とした場合には、第1期間の始期から所定時間経過した時刻を第1期間の終期や、第2期間の始期や終期とすることができる。
【0011】
第1変速手段は車速に対応する移動速度よりも小さくなるように車両マークの移動速度を制御すればよく、第1期間において車両マークの移動速度は一定であってもよいし、変動してもよい。例えば、車両マークの移動速度を、車速に対して1より小さい係数を乗じた速度に対応する移動速度とする場合には、車速の変動に追従して車両マークの移動速度も変動することとなる。車速に対応する移動速度と、車両マークの移動速度とを乖離させるほど、先行距離を増大させることができる。また、第2期間においても、車両マークの移動速度は一定であってもよいし、非一定であってもよい。第2期間において、車速に対応する移動速度と、車両マークの移動速度とを乖離させるほど、先行距離の縮小を促進することができる。
【0012】
ところで、分岐地点の通過後に車両が走行した距離が長くなるほど、分岐地点の通過後に走行した道路についての情報がより多く得られるため、車両が分岐地点の通過後に走行する走行道路を高い確度で特定することができる。従って、地図に示される分岐地点の位置に車両マークが到達するまでに、車両が分岐地点の通過後に走行する距離が長くなるようにするのが望ましい。
ここで、車両マークが地図に示される分岐地点の位置に到達する段階では、車両マークが示す位置に対して現在位置が先行する先行距離だけ、車両が分岐地点の通過後に走行することとなる。従って、車両マークが示す位置に対して現在位置が先行する先行距離が最大となる第1期間の終期において車両マークが地図に示される分岐地点の位置に到達するようにすれば、地図に示される分岐地点の位置に車両マークが到達するまでに、車両が分岐地点の通過後に走行する距離を最大とすることができる。すなわち、第1期間の終期において車両マークが地図に示される分岐地点の位置に到達するようにすれば、車両マークが地図に示される分岐地点の位置に到達するまでに高い確度で走行道路を特定しておくことができる。
【0013】
なお、車両が複数の分岐地点を連続して通過する場合、第1期間と第2期間とが交互に繰り返して到来することとなる。従って、連続する分岐地点間の距離が短い場合には、先に通過した分岐地点に関する第2期間が終了する前に、後に通過する分岐地点に関する第1期間が開始する場合も考えられる。この場合、車両マークが示す位置が正確に車両の現在位置を示さない期間が長期にわたって継続することとなるため、車両マークを表示させる本来の目的からして望ましくない。従って、連続する分岐地点間の距離が小さいほど第1期間を短くし、車両マークが示す位置が正確に車両の現在位置を示す期間を設けるのが望ましい。
【0014】
ところで、第1期間が長いほど、車両マークが示す位置に対して現在位置が先行する先行距離が長くなる。この先行距離が長いほど高い確度で走行道路を特定することができるが、分岐地点の通過後に走行可能な複数の道路の形状の類似性が低ければ、先行距離を長く確保しなくても高い確度で走行道路を特定することができる。従って、分岐地点の通過後に走行可能な複数の道路の形状の類似性が低いほど第1期間を短くすることにより、車両マークが示す位置が正確に車両の現在位置を示す期間をできるだけ長く確保するのが望ましい。
【0015】
なお、本発明のように、車両マークの移動速度を変速させる手法は、この処理を行う方法やプログラムとしても適用可能である。また、以上のような表示制御装置、方法、プログラムは、単独の装置として実現される場合もあれば、複数の装置として実現される場合もある。また、車両に備えられる各部と共有の部品を利用して実現される場合もあれば、車両に搭載されない各部と連携して実現される場合もあり、各種の態様を含むものである。また、一部がソフトウェアであり一部がハードウェアであったりするなど、適宜、変更可能である。さらに、表示制御装置を制御するプログラムの記録媒体としても発明は成立する。むろん、そのソフトウェアの記録媒体は、磁気記録媒体であってもよいし光磁気記録媒体であってもよいし、今後開発されるいかなる記録媒体においても全く同様に考えることができる。
【図面の簡単な説明】
【0016】
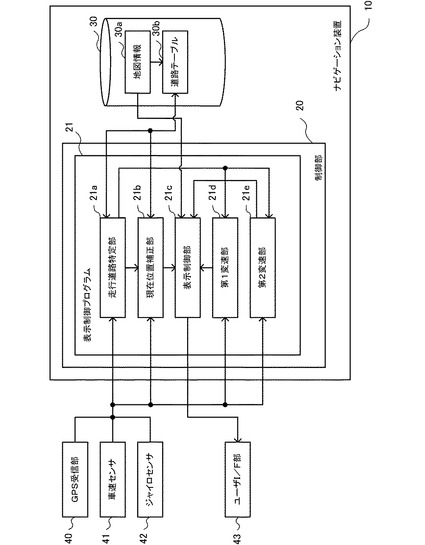
【図1】表示制御装置を含むナビゲーション装置を示すブロック図である。
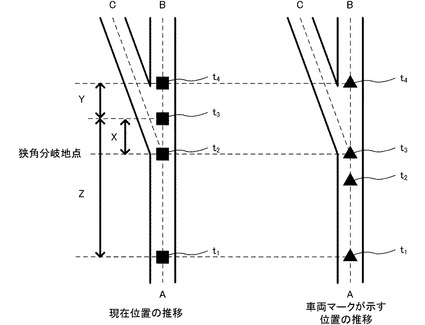
【図2】現在位置と車両マークが示す位置とを比較して示す図である。
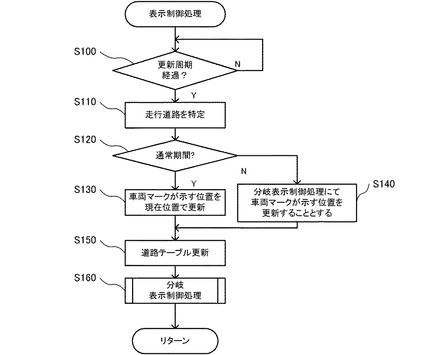
【図3】表示制御処理を示すフローチャートである。
【図4】連続する狭角分岐地点を示す模式図である。
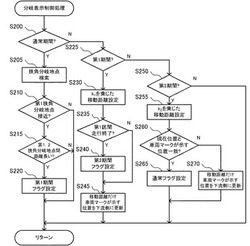
【図5】分岐表示制御処理を示すフローチャートである。
【発明を実施するための形態】
【0017】
ここでは、下記の順序に従って本発明の実施の形態について説明する。
(1)表示制御装置の構成:
(2)表示制御処理:
(3)分岐表示制御処理:
(4)他の実施形態:
【0018】
(1)表示制御装置の構成:
図1は、車両に搭載された表示制御装置の構成を示すブロック図である。本実施形態において表示制御装置は、ナビゲーション装置10によって実現される。ナビゲーション装置10は、CPU、RAM、ROM等を備える制御部20を備えており、制御部20はROMに記憶されたプログラムを実行する。制御部20は、このプログラムの一つとして表示制御プログラム21を実行する。
【0019】
車両は、GPS受信部40、車速センサ41、ジャイロセンサ42、ユーザI/F部43を備える。GPS受信部40は、GPS衛星からの電波を受信し、図示しないインタフェースを介して車両の現在位置を算出するための信号を示す信号を出力する。制御部20は、この信号を取得して車両の現在位置を取得する。車速センサ41は、車両が備える車輪の回転速度に対応した信号を出力する。制御部20は、図示しないインタフェースを介してこの信号を取得し、車速を取得する。ジャイロセンサ42は、車両の水平面内の旋回についての角加速度を検出し、車両の向きに対応した信号を出力する。制御部20は図示しないインタフェースを介してこの信号を取得し、車両の走行方向を取得する。GPS受信部40と車速センサ41とジャイロセンサ42とが出力する信号は車両情報に相当する。ユーザI/F部43は、運転者の指示を入力し、また運転者に各種の情報を提供するためのインタフェース部であり、図示しないタッチパネルディスプレイやスイッチ、スピーカ等を備えている。ユーザI/F部43は信号を制御部20から受信し、地図と車両マークとをタッチパネルディスプレイに表示する。
【0020】
記憶媒体30には地図情報30aと道路テーブル30bとが記録されている。地図情報30aは、車両が走行する道路の端点に対応するノードを示すノードデータ、ノード間の道路の形状を特定するための形状補間点データ、ノード同士の連結を示すリンクデータ等を含む。すなわち、制御部20は、地図情報30aに基づいて、端点(始点および終点)がノードによって定義された道路ごとに道路の形状を特定することが可能である。3以上の道路が共通のノードを端点とする場合には、当該ノードは分岐地点に対応する。すなわち、いずれかの道路から進入し、進入した道路とは異なる2以上の道路に退出可能な地点が分岐地点である。なお、本明細書では、分岐地点において2つの道路が道なりに接続する場合でも、これらの道路は互いに異なる道路であるとする。本実施形態では、車両が分岐地点に進入する段階において、分岐地点から退出可能な道路に、分岐地点からの退出方向の角度差が所定の閾値(例えば、30度。)よりも小さくなる少なくとも一対の道路が含まれる分岐地点を狭角分岐地点とする。
【0021】
道路テーブル30bは、車両が走行する可能性が高い道路に関する道路データ(ノードデータ、リンクデータ、形状補間点データ等)が登録されたテーブルであって、地図情報30aから抽出して生成されるデータである。なお、車両が走行する可能性が高い道路とは、車両が現在走行する走行道路に対して進行方向前方側にて接続する道路等である。制御部20は、道路テーブル30bを参照することにより、車両が走行する可能性のある道路の形状を取得することができる。
【0022】
制御部20は、表示制御プログラム21を実行することにより、車両の位置を示す車両マークを表示させる処理を行う。表示制御プログラム21は、走行道路特定部21aと現在位置補正部21bと表示制御部21cと第1変速部21dと第2変速部21eとを備えている。走行道路特定部21aは、車両が走行している走行道路を特定する機能を制御部20に実行させるモジュールである。すなわち、走行道路特定部21aの機能により制御部20は、ジャイロセンサ42の出力信号に基づく走行方向と、車速センサ41の出力信号に基づく車速とに基づいて車両の走行軌跡を特定し、当該走行軌跡の形状との相関性の高い形状を有する道路を走行道路として特定する。
【0023】
現在位置補正部21bは、GPS受信部40の出力信号に基づく現在位置を補正する機能を制御部20に実行させるモジュールである。すなわち、現在位置補正部21bの機能により制御部20は、GPS受信部40の出力信号に基づく現在位置を取得し、当該現在位置を走行道路特定部21aの機能によって特定された走行道路上の位置に近づくように補正する。すなわち、GPS受信部40の出力信号に基づく現在位置は測位誤差の影響を受けるが、走行道路上の位置に近づくように現在位置を補正することにより、車両が存在する位置として確からしい位置へと現在位置を補正する。
【0024】
表示制御部21cは、車両の位置を示す車両マークと地図とを表示部に表示させる機能を制御部20に実行させるモジュールである。すなわち、表示制御部21cの機能により制御部20は、地図と車両マークを示す画像を生成し、当該画像に基づく信号をユーザI/F部43に出力する。具体的には、制御部20は、地図情報30aに基づいて生成した地図を示す画像に対して車両マークを示す画像を重畳することにより、前記画像を生成する。なお、本明細書において、"車両マークの位置"は地図に対する車両マークの相対位置を示し、"車両マークの移動速度"は地図に対する車両マークの相対速度を示す。一方、"車両マークが示す位置"は車両マークによって表される実空間の位置を示す。表示制御部21cの機能により制御部20は、地図を示す画像に対して車両マークを示す画像を重畳する相対的な位置を、現在位置補正部21bの機能によって補正された現在位置に基づいて逐次更新していくことにより、地図と車両マークとを相対的に移動させる。すなわち、表示制御部21cの機能により制御部20は、地図に対する車両マークの移動速度を車速に対応する移動速度とする。また、現在位置は走行道路特定部21aの機能によって特定された走行道路に近づくように補正されるため、前記走行道路に沿った位置を示すように車両マークが移動することとなる。ただし、後述する第1期間と第2期間において、制御部20は、地図に対する車両マークの移動速度を第1変速部21d、第2変速部21eの機能が設定した移動速度とする。以下、第1変速部21d、第2変速部21eの機能について説明する。
【0025】
第1変速部21dは、狭角分岐地点の通過前から通過後にわたる第1期間において、地図に対する車両マークの移動速度を車速に対応する移動速度よりも小さくする機能を制御部20に実行させるモジュールである。
図2は狭角分岐地点を車両が通過する様子を模式的に示す図である。図2において、狭角分岐地点において道路A〜Cが接続しており、車両が道路Aから狭角分岐地点に進入し、狭角分岐地点から道路Bに退出する様子を示している。図2左では車両の現在位置の実空間における推移を黒い正方形のポインタで示し、図2右では車両マークが示す位置の実空間における推移を三角形のポインタで示している。各ポインタには時刻t1〜t4が対応づけて示されており、これらの時刻t1〜t4における現在位置および車両マークが示す位置を各ポインタが示している。
【0026】
ここで、第1期間とは、第1変速部21dの機能により設定される第1区間を車両が走行する期間である。第1区間の終点は狭角分岐地点よりも距離Xだけ下流側の位置である。なお、本明細書において、狭角分岐地点から見て車両が狭角分岐地点に進入する前に走行する位置の方向を上流側とし、狭角分岐地点から見て車両が狭角分岐地点を退出した後に走行する位置の方向を下流側とする。狭角分岐地点から第1区間の終点までの距離Xは、例えば走行道路特定部21aの機能により、車両が狭角分岐地点の走行後に走行する走行道路が道路Aであるのか道路Bであるのかを特定できるまでに車両が狭角分岐地点の走行後に走行すべき距離とされる。なお、車両が狭角分岐地点の通過後に走行した距離Xが長いほど、道路A,Bの形状をより反映させた走行軌跡が得られ、走行道路特定部21aの機能により制御部20は、車両が狭角分岐地点から退出した走行道路を高い確度で特定することができる。
【0027】
第1変速部21dの機能により制御部20は、車速センサ41の出力信号に基づく車速V(t)よりも小さい速度に対応する移動速度を第1期間における車両マークの地図に対する移動速度として設定する。本実施形態では、車速V(t)に1よりも小さい変速係数k1を乗じた速度k1V(t)に対応する移動速度を第1期間における車両マークの地図に対する移動速度とする。また、車速V(t)は時刻tの関数であり、変速係数k1は定数である。以上のように1よりも小さい変速係数k1を設定することにより、第1期間において、車速V(t)よりも小さい速度k1V(t)に対応する移動速度を車両マークの地図に対する移動速度として設定することができる。これにより、車両マークが示す位置に対して現在位置が先行し(下流側となり)、車両マークが示す位置に対して現在位置が先行する先行距離が時間の経過とともに増大する。なお、第1期間の始期の時刻t1において、車両マークが示す位置と現在位置とは一致している。また、時刻t2は、車両が分岐地点に到達する時刻tである。
【0028】
本実施形態では、車両が第1区間の終点に到達する時刻t3、すなわち狭角分岐地点の通過後に距離Xだけ車両が走行した時刻t3において車両マークが地図にて示される狭角分岐地点の位置に到達するように、第1変速部21dの機能により制御部20は、第1区間の区間長Zを設定する。車両が狭角分岐地点の退出後に距離Xだけ走行した時刻t3において車両マークが地図にて示される狭角分岐地点の位置に到達するため、第1区間の区間長Zから距離Xを減じた距離(Z−X)が第1期間において車両マークが示す位置が移動する距離となる。車両が第1期間(t1〜t3)に走行する距離(区間長Z)は、以下の(1)式で表される。
【数1】

一方、第1期間において車両マークが示す位置が移動する距離(Z−X)は、以下の(2)式で表される。
【数2】
【0029】
前記の(1),(2)式により、第1期間において車両マークが示す位置が移動する距離(Z−X)は、車両が第1期間に走行する距離(区間長Z)に変速係数k1を乗算した距離k1Zとなり、この関係はどのように車速V(t)が推移しても成立する。さらに、前記の(1),(2)式をZに関して解くと、以下の(3)式のようになる。
【数3】
例えば、X=50[m]とし、k1=0.75とした場合には、Z=200[m]となり、狭角分岐地点よりも距離(Z−X)=150[m]だけ上流側の位置が第1区間の始点となる。
【0030】
第2変速部21eは、第1期間に続く第2期間において、地図に対する車両マークの移動速度を車速に対応する移動速度よりも大きくする機能を制御部20に実行させるモジュールである。すなわち、第2変速部21eの機能により制御部20は、車速センサ41の出力信号に基づく車速V(t)に1よりも大きい変速係数k2を乗じた速度k2V(t)に対応する移動速度を第2期間における車両マークの地図に対する移動速度とする。また、第2変速部21eの機能により制御部20は、第2期間において、走行道路特定部21aの機能により車両が現在走行する道路として特定された走行道路に沿った位置を示すように車両マークを移動させる。すなわち、制御部20は、第2期間において、車両が狭角分岐地点の退出後に走行する走行道路を特定し、当該走行道路に沿った位置を示すように車両マークを移動させる。
【0031】
車両マークが示す位置に対して現在位置が先行する先行距離は第1期間の終期において距離Xとなるが、この先行距離が距離Xから時間の経過とともに縮小し、最終的には0となる。第2変速部21eの機能により制御部20は、第2期間において、車両マークが示す位置に対して現在位置が先行する先行距離が0となったか否かを判定し、当該先行距離が0となった時刻t4を第2期間の終期とする。また、第2期間において車両マークが示す位置が移動する距離は、車両が走行する距離Yに第2期間の始期における先行距離である距離Xを加算した距離(X+Y)となる。
【0032】
ここで、第2期間において車両が走行する距離Yは、以下の(4)式で表される。
【数4】
一方、第2期間において車両マークが示す位置が移動する距離(X+Y)は、以下の(5)式で表される。
【数5】
前記の(4),(5)式により、第2期間において車両マークが示す位置が移動する距離(X+Y)は、車両が第2期間に走行する距離Yに変速係数k2を乗算した距離k2Zとなる。前記の(4),(5)式をYに関して解くと、以下の(6)式のようになる。
【数6】
例えば、X=50[m]とし、k1=2とした場合には、Y=50[m]となり、狭角分岐地点よりも距離(X+Y)=100[m]だけ下流側の位置を車両が走行する時刻t4が第2期間の終期となる。第2期間において車両が走行する区間を第2区間とすると、第2区間の始点は狭角分岐地点から距離Xだけ下流側の位置となり、第2区間の終点は狭角分岐地点から距離(X+Y)だけ下流側の位置となる。
【0033】
以上のように構成した本実施形態では、制御部20は、分岐地点の通過前から通過後にわたる第1期間において、地図に対する車両マークの移動速度を車速V(t)に対応する移動速度よりも小さくする。これにより、車両が分岐地点に到達するよりも遅く、地図に示す分岐地点の位置に車両マークを到達させることができる。すなわち、車両が分岐地点に到達してからしばらくの期間は、地図に示す分岐地点の位置に車両マークが到達しない。従って、当該期間において、車両が分岐地点の通過後に走行する走行道路に対応する位置へ車両マークを移動させなくてもよく、車両が分岐地点の通過後に走行する走行道路の特定結果に影響されることなく車両マークを表示することができる。すなわち、車両が分岐地点に到達した直後において、車両が分岐地点の通過後に走行する走行道路の特定結果が不安定になる場合であっても、車両マークの表示が不自然となることはない。
【0034】
また、本実施形態では、地図に示される分岐地点の位置に車両マークが到達した後の第2期間においては、現在において特定された走行道路に沿った位置を示すように車両マークを移動させている。ここで、地図に示される分岐地点の位置に車両マークが到達した後の第2期間においては、すでに分岐地点の通過後に車両が前記先行距離だけ走行しているため、車両が分岐地点の通過後に走行する走行道路についての走行軌跡が少なくとも前記先行距離に対応する分は得られていることとなる。従って、当該走行軌跡に基づいて車両が分岐地点の通過後に走行する走行道路を高い確度で特定することができる。
【0035】
また、第1期間において車両マークが示す位置に対して現在位置が先行する先行距離は、第1期間において時間が経過するほど増加し、第1期間の終期において最大の距離Xとなる。制御部20は、第1期間の後の第2期間において、地図に対する車両マークの移動速度を車速に対応する移動速度よりも大きくする。これにより、第1期間の終期において最大となった先行距離を第2期間において縮小していくことができる。すなわち、第2期間においては、時間の経過とともに、車両マークが示す位置と現在位置とを近づけていくことができ、車両マークが正確に現在位置を示すようにしていくことができる。すなわち、第1期間と第2期間とにおいて車両マークが示す位置に対して現在位置が先行する先行距離が生じるが、それ以外の期間においては車両マークが正確に現在位置を示すようにすることができる。
【0036】
また、車両マークが示す位置に対して現在位置が先行する先行距離が最大の距離Xとなる第1期間の終期において、地図に示される狭角分岐地点の位置に車両マークを到達させるため、地図に示される狭角分岐地点の位置に車両マークが到達するまでに車両が狭角分岐地点の通過後に走行する距離も最大の距離Xとすることができる。すなわち、第1期間の終期において車両マークを地図に示される狭角分岐地点の位置に到達させるため、車両マークが地図に示される狭角分岐地点の位置に到達する段階において、高い確度で走行道路を特定することができる。車両が狭角分岐地点の通過後に走行した距離が長くなるほど、狭角分岐地点の通過後に走行した走行道路(道路B)の形状の特徴をより反映した走行軌跡が得られるからである。
【0037】
(2)表示制御処理:
図3は、表示制御処理を示すフローチャートである。表示制御処理は所定の更新周期ごとに繰り返して実行されるループ処理であり、表示制御処理が1ループ実行されるごとに地図に対する車両マークの相対位置が更新される。表示制御部21cの機能により制御部20は、ステップS100において所定の更新周期が経過したか否かを判定し、更新周期が経過するまで待機する。更新周期が経過した場合には、ステップS110において走行道路特定部21aの機能により制御部20は走行道路を特定する。すなわち、走行道路特定部21aの機能により制御部20は、ジャイロセンサ42の出力信号に基づく車両方向と、車速センサ41の出力信号に基づく車速とに基づいて車両の走行軌跡を特定し、当該走行軌跡の形状との相関性の高い形状を有する道路を走行道路として特定する。また、走行道路特定部21aの機能により制御部20は、道路テーブル30bに道路データが登録された道路を候補として、走行道路の特定を行う。すなわち、道路テーブル30bに道路データが登録された道路のうち走行軌跡と最も形状が相関する道路が走行道路であると特定される。
【0038】
ステップS120において、表示制御部21cの機能により制御部20は、現在が通常期間に属するか否かを判定する。なお、通常期間とは上述の第1期間と第2期間のいずれでもない期間を意味する。また、制御部20は、現在が属する期間を特定するためのフラグを記録媒体30の所定アドレスに保持させており、当該フラグとして通常フラグが保持されていることをもって、現在が通常期間に属すると判定する。
【0039】
現在が通常期間に属する場合、表示制御部21cの機能により制御部20は、ステップS130において車両マークが示す位置を現在位置で更新する。表示制御部21cの機能により制御部20は、地図情報30aに基づいて生成した地図を示す画像に対して車両マークを示す画像を重畳することにより、前記画像を生成するとともに、当該画像に基づく信号をユーザI/F部43に出力する。現在が通常期間に属する場合、表示制御部21cの機能により制御部20は、地図を示す画像に対して車両マークを示す画像を重畳する位置を現在位置に対応する位置とする。なお、ここにおける現在位置とは、現在位置補正部21bの機能により補正された現在位置である。ステップS130を更新周期ごとに繰り返して実行することにより、通常期間においては現在位置の推移に追従するように地図に対して車両マークを移動させていくことができる。また、現在位置は、現在位置補正部21bの機能により補正されるため、地図に示される走行道路に沿って車両マークが移動するように車両マークと地図とが相対移動することとなる。
【0040】
一方、ステップS120において現在が通常期間に属さないと判定された場合、表示制御部21cの機能により制御部20は、ステップS140において分岐表示制御処理(ステップS160)にて車両マークの位置を更新することとする。すなわち、現在が第1期間と第2期間のいずれかに属する場合には、車両マークの位置の更新を後述する分岐表示制御処理で行うこととする。
【0041】
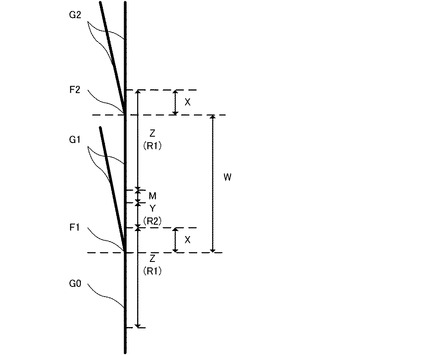
ステップS150において、走行道路特定部21aの機能により制御部20は、道路テーブル30bを更新する。すなわち、走行道路特定部21aの機能により制御部20は、車両が走行する可能性の高い道路を地図情報30aから抽出し、当該抽出した道路の形状を道路テーブル30bに登録する。図4に示すように、本実施形態では、ステップS110にて特定した現在の走行道路(G0と示す。)、当該走行道路の端点を示すノードであって車両の進行方向前方側のノードを共通のノードとして有する1次接続道路(G1と示す。)、および、当該1次接続道路のもう一方のノードを共通のノードとして有する2次接続道路(G2と示す。)とを抽出する。すなわち、走行道路と、当該走行道路に対して直接接続する1次接続道路と、当該1次接続道路に接続する2次接続道路を抽出する。そして、これらの各道路に関する道路データを道路テーブル30bに登録する。道路テーブル30bに道路データが登録された道路は、ステップS110において走行道路の候補となる。次のステップS160において、制御部20は、分岐表示制御処理を実行する。
【0042】
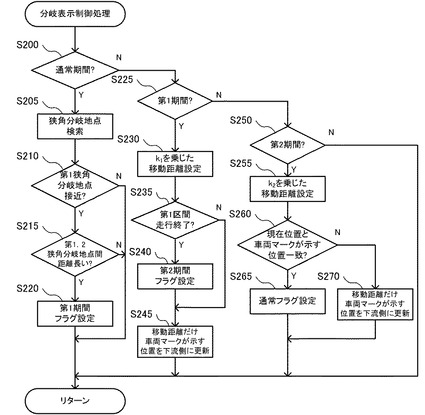
(3)分岐表示制御処理:
図5は、分岐表示制御処理を示すフローチャートである。ステップS200において、表示制御部21cの機能により制御部20は、現在が通常期間に属するか否かを判定する。現在が通常期間に属する場合、ステップS205において、第1変速部21dの機能により制御部20は、道路テーブル30bを参照して狭角分岐地点を検索する。上述のように狭角分岐地点は退出後に走行する走行道路の特定確度が低くなる分岐地点であり、具体的には、各道路へ車両が退出する場合の退出方向同士の角度差の最小値が30度よりも小さい分岐地点が狭角分岐地点となる。このような場合、分岐地点の退出直後の走行軌跡が互いに類似することとなり、前記一対の道路のどちらに退出したかを高い確度で特定することができなくなる。
【0043】
ステップS210において、第1変速部21dの機能により制御部20は、第1狭角分岐地点に対して車両が距離(Z−X)(図2A、参照。)以内まで接近しているか否かを判定する。すなわち、第1変速部21dの機能により制御部20は、車両が第1区間の始点を通過し、第1区間内に位置しているか否かを判定する。なお、本実施形態では、X=50[m]とし、k1=0.75,k2=2が規定値として与えられており、前記の各式によって距離Z,Yが予め設定されている。また、ステップS205において第1狭角分岐地点が検索されなかった場合には、第1狭角分岐地点に対して車両が距離(Z−X)以内まで接近していないと判定することとする。
【0044】
第1狭角分岐地点に対して車両が距離(Z−X)以内まで接近している場合、ステップS215において、第1変速部21dの機能により制御部20は、現在の走行道路と第1接続道路とが接続する第1狭角分岐地点(図4にてF1と示す。)と、第1接続道路と第2接続道路とが接続する第2狭角分岐地点(図4にてF2と示す。)との距離(第1狭角分岐地点と第2狭角分岐地点とを接続する第1接続道路の道なりの長さ)が所定の下限値Wよりも長いか否かを判定する。下限値Wは、以下の(7)式で表される。
【数7】
なお、前記の(7)式においてMは所定のマージン距離を示す。
【0045】
図4に示すように、第1狭角分岐地点と第2狭角分岐地点の双方に対して第1区間(R1と示す。)と第2区間(R2と示す。)とを設定する場合を想定する。そして、第1狭角分岐地点と第2狭角分岐地点との距離が下限値Wと等しくなるとき、第1狭角分岐地点に対して設定される第2区間の終点と第2狭角分岐地点に対して設定される第1区間の始点との間の距離がマージン距離Mと等しくなる。すなわち、第1狭角分岐地点と第2狭角分岐地点の双方に対して第1区間と第2区間とを設定した場合に、第1狭角分岐地点に対して設定された第2区間の終点と、第2狭角分岐地点に対して設定された第1区間の始点とがマージン距離Mよりも離間した位置関係となるか否かがステップS215では判定される。また、ステップS205において第1狭角分岐地点は検索されたが第2狭角分岐地点が検索されなかった場合には、第1狭角分岐地点と第2狭角分岐地点との距離が下限値Wよりも長いと判定する。例えば、マージン距離MはGPS受信部40や車速センサ41やジャイロセンサ42の誤差や現在位置等の計算誤差や更新周期の長さ等を考慮して30[m]と設定される。
【0046】
第1狭角分岐地点と第2狭角分岐地点との距離が所定の下限値Wよりも長い場合、ステップS220において、第1変速部21dの機能により制御部20は、第1期間フラグを設定する。そして、次の更新周期の経過を待つ(ステップS100)。一方、ステップS210において第1狭角分岐地点に対して車両が距離(Z−X)以内まで接近していないと判定された場合、または、ステップS215において第1狭角分岐地点と第2狭角分岐地点との距離が下限値W以下と判定された場合、第1期間フラグを設定することなく、次の更新周期の経過を待つ(ステップS100)。
【0047】
以上のように、ステップS200にて現在が通常期間に属すると判定された場合には、第1期間フラグを設定するための条件を満足するか否かの判定(S210〜S215)が順次行われ、条件を満足する場合には第1期間フラグを設定する。以上の処理を繰り返すことにより、通常期間においては現在位置に基づいて車両マークの位置を更新しつつ、第1狭角分岐地点についての第1区間に車両が進入した時点で第1期間フラグを設定することができる。なお、進入しようとする分岐地点が狭角分岐地点に該当しなければ、第1期間フラグを設定しない。これにより、分岐地点から退出した走行道路が高い確度で特定できる場合には、車両マークが正確に現在位置を示すようにすることができる。また、マージン距離Mが確保できない場合にも第1期間フラグを設定しない。これにより、第2期間の後に第1期間が連続することが防止でき、車両マークが示す位置が現在位置から乖離する期間が長期にわたって継続することが防止できる。なお、第1期間フラグを設定する時刻が第1期間の始期の時刻t1となる。
【0048】
次に、第1期間フラグが設定された場合の処理について説明する。まず、図3のステップS120において通常期間でないと判定されるため、ステップS140において分岐表示制御処理(ステップS160)にて車両マークの位置を更新することとする。すなわち、ステップS130において現在位置に基づく車両マークの位置の更新を行わない。なお、ステップS110における走行道路の特定と、ステップS150における道路テーブル30bの更新は通常期間と同様に行われる。図5のステップS200において現在が通常期間に属さないと判定され、ステップS225において現在が第1期間に属すると判定されることとなる。
【0049】
次のステップS230において、第1変速部21dの機能により制御部20は、車両マークが示す位置の移動距離を設定する。ここでは、第1変速部21dの機能により制御部20は、現在の車速V(t)に更新周期の1周期分の時間の長さを乗じることにより基準の移動距離を算出し、当該基準の移動距離に対して変速係数k1を乗じた距離を移動距離として設定する。すなわち、車両が前回の更新周期から現在までに現実に移動した距離に対して変速係数k1を乗じた距離を移動距離として設定する。
【0050】
ステップS235において、第1変速部21dの機能により制御部20は、第1区間の走行が終了したか否かを判定する。すなわち、第1変速部21dの機能により制御部20は、第1期間の始期から車両が走行した距離が第1区間の区間長Zと等しくなったか否かを判定する。第1区間の走行が終了した場合にはステップS240において第2期間フラグを設定してからステップS245を実行し、第1区間の走行が終了していない場合には第2期間フラグを設定することなくステップS245を実行する。ステップS245において、第1変速部21dの機能により制御部20は、前回の更新周期における車両マークが示す位置に対して、ステップS230にて設定した移動距離だけ下流側の位置へと車両マークの位置を更新する。ここでは、第1期間の始期の時刻t1において走行道路特定部21aの機能によって特定された走行道路(道路A)を取得し、車両マークが示す位置を当該走行道路に沿って前記移動距離だけ下流側とする。これを受けて、表示制御部21cの機能により制御部20は、更新された車両マークが示す位置に基づいて、地図を示す画像に対して車両マークを示す画像を重畳した画像に基づく信号をユーザI/F部43に出力する。
【0051】
以上のように、ステップS225にて現在が第1期間に属すると判定された場合には、車両マークが示す位置の更新周期ごとの移動距離が現実の車両の移動距離に対して1よりも小さい変速係数k1を乗じて得られた値とされる。従って、ステップS230,S245を繰り返して実行することにより、第1期間においては車速V(t)に対応する移動速度よりも小さい移動速度で車両マークが地図に対して移動することとなる。そして、車両が第1区間の終点を走行した段階で第2期間フラグが設定されることとなる。なお、本実施形態では、車両が第1区間の終点を走行した段階で第2期間フラグを設定することとしたが、地図にて示される狭角分岐地点の位置に車両マークが実際に到達した段階で第2期間フラグを設定してもよい。さらに、車両が第1区間の終点を走行するタイミングと、地図にて示される狭角分岐地点の位置に車両マークが実際に到達するタイミングとが一致するように、変速係数k1を時間に応じて調整してもよい。
【0052】
次に、ステップS240にて第2期間フラグが設定された場合の処理について説明する。まず、図3のステップS120において通常期間でないと判定されるため、ステップS140において分岐表示制御処理(ステップS160)にて車両マークの位置を更新することとする。第2期間の場合も、ステップS110における走行道路の特定と、ステップS150における道路テーブル30bの更新は通常期間と同様に行われる。図5のステップS200,S225においてそれぞれ現在が通常期間と第1期間とに属さないと判定され、ステップS250において現在が第2期間に属すると判定されることとなる。
【0053】
次のステップS255において、第2変速部21eの機能により制御部20は、車両マークが示す位置の移動距離を設定する。ここでは、第2変速部21eの機能により制御部20は、基準の移動距離に対して変速係数k2を乗じた距離を移動距離として設定する。ステップS260において、第2変速部21eの機能により制御部20は、前回の更新周期における車両マークが示す位置と、車両の現在位置とが一致するか否かを判定し、一致する場合にはステップS265において通常フラグを設定する。一方、前回の更新周期における車両マークが示す位置と、車両の現在位置とが一致しない場合には、ステップS270において、第2変速部21eの機能により制御部20は、前回の更新周期における車両マークが示す位置に対して、ステップS255にて設定した移動距離だけ下流側の位置へと車両マークの位置を更新する。ここでは、現在の更新周期のステップS110(図3)において走行道路特定部21aの機能によって特定された走行道路(道路B)を取得し、車両マークが示す位置を当該走行道路に沿って前記移動距離だけ下流側とする。これを受けて、表示制御部21cの機能により制御部20は、更新された車両マークが示す位置に基づいて、地図を示す画像に対して車両マークを示す画像を重畳した画像に基づく信号をユーザI/F部43に出力する。
【0054】
以上のように、ステップS250にて現在が第2期間に属すると判定された場合には、車両マークが示す位置の更新周期ごとの移動距離が現実の車両の移動距離に対して1よりも大きい変速係数k2を乗じて得られた値とされる。従って、ステップS255,S270を繰り返して実行することにより、第2期間においては現在位置に対応する移動速度よりも大きい移動速度で車両マークが地図に対して移動することとなる。そして、車両マークが示す位置が車両の現在位置に追い着いた段階で通常フラグが設定されることとなる。これにより、通常期間に移行し、ステップS130において現在位置に基づいて車両マークが示す位置が更新されることとなる。
【0055】
(4)他の実施形態:
以上の実施形態は本発明を実施するための一例であり、他にも種々の実施形態を採用可能である。例えば、前記実施形態では、マージン距離Mが確保できない場合に第1期間フラグを設定しないようにしたが、マージン距離Mが確保できるように他の距離Xや変速係数k1,k2を調整するようにしてもよい。前記の(3),(6)式において距離Xを短くするほど第1区間の区間長Zと第2区間の区間長Yを短くすることができる。前記の(7)式の右辺の値が小さくなり、第1狭角分岐地点と第2狭角分岐地点との距離の下限値Wを小さく緩和することができる。また、前記の(3)式において変速係数k1を小さくすることによっても第1区間の区間長Zを短くすることができ、前記の(6)式において変速係数k2を大きくすることによっても第2区間の区間長Yを短くすることができる。従って、変速係数k1,k2を調整することにより、第1狭角分岐地点と第2狭角分岐地点との距離の下限値Wを小さく緩和することができる。この場合、第1区間の区間長Zと第2区間の区間長Yが短くなるため、車両が第1区間および第2区間を走行する第1期間と第2期間も短くなる。
【0056】
また、前記実施形態では狭角分岐地点の退出後の走行道路の特定確度を確保するための距離Xを一定の値としたが、当該距離Xを狭角分岐地点から退出可能な道路の形状に応じて設定してもよい。例えば、狭角分岐地点から各道路に退出した場合の退出方向同士の角度の最小値が大きくなればなるほど、走行軌跡の類似性は低くなるため、車両が狭角分岐地点から退出した走行道路の特定確度は高くなる。従って、狭角分岐地点から各道路に退出した場合の退出方向同士の角度の最小値が大きくなればなるほど、距離Xを小さくしてもよい。この場合、前記の(3),(6)式の関係から第1区間の区間長Zと第2区間の区間長Yが短くなり、車両が第1区間および第2区間を走行する第1期間と第2期間も短くなる。さらに、高速道路上の狭角分岐地点に対して一般道路よりも距離Xを大きく設定してもよい。高速道路では車速V(t)が大きいため、距離Xが大きくなっても第1期間と第2期間が短くなるからである。
【0057】
なお、前記実施形態において、ナビゲーション装置10が現在位置と車速とを計測するセンサ等を備えてもよい。ナビゲーション装置10が表示部を備えていてもよい。また、地図は、少なくとも分岐地点に接続する道路と分岐地点とが示されるものであればよく、例えば狭角分岐地点に接続する道路と分岐地点とを模式的に図示した模式図であってもよい。車両マークは、地図との相対位置によって車両の位置を示すものであればよく、車両が移動した場合には、車両マークのみが移動してもよいし、地図のみが移動してもよいし、車両マークと地図の双方が移動してもよい。
【0058】
また、第2期間は第1期間の後の期間であればよく、第1期間と第2期間との間に他の期間が介在してもよい。この場合であっても、第2期間が第1期間よりも後であれば、第1期間において生じた先行距離を第2期間において縮小することができる。また、車両の現在位置と車両マークが示す位置とが所定距離よりも離間した時刻や、所定距離よりも接近した時刻を第1期間と第2期間の始期と終期としてもよい。さらに、第1期間と第2期間の始期と終期とは、所定の基準時刻から所定時間経過した時刻であってもよい。例えば、基準時刻としての第1期間の始期から所定時間経過した時刻を第1期間の終期や、第2期間の始期や終期としてもよい。
【0059】
第1変速手段は車速に対応する移動速度よりも小さくなるように車両マークの移動速度を制御すればよく、第1期間において車両マークの移動速度は一定としてもよい。一方、第2変速手段は車速に対応する移動速度よりも大きくなるように車両マークの移動速度を制御すればよく、第2期間において車両マークの移動速度は一定であってもよい。極めて低速で走行したり、停止することが予測される道路が狭角分岐地点に接続する場合には、運転者が車両マークを注視して現在位置を確認することが想定されるため、第1期間フラグを設定しないようにしてもよい。例えば、狭角分岐地点からいずれの道路に退出するのにも所定角度以上の旋回を伴う場合に、第1期間フラグを設定しないようにしてもよい。また、狭角分岐地点に細街路や駐車場への分岐道路等が接続する場合に、第1期間フラグを設定しないようにしてもよい。
【符号の説明】
【0060】
10…ナビゲーション装置、20…制御部、21…表示制御プログラム、21a…走行道路特定部、21b…現在位置補正部、21c…表示制御部、21d…第1変速部、21e…第2変速部、30…記録媒体、30a…地図情報、30b…道路テーブル、30c…駐車道路情報、40…GPS受信部、41…車速センサ、42…ジャイロセンサ、43…ユーザI/F部
【技術分野】
【0001】
本発明は、表示制御装置、表示制御方法および表示制御プログラムに関する。
【背景技術】
【0002】
走行軌跡の形状と相関の高い形状を有する道路を、車両が走行している道路であると特定するマップマッチング技術が知られている(特許文献1、参照。)。また、特許文献1では、本線道路と側道とが並設された区間を車両が走行する場合に、走行軌跡と本線道路との方位差が所定値以上となるまでは車両マークを本線道路上に表示し、車両と本線道路と方位差が所定値以上となったタイミングで車両マークを側道上に表示することが開示されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2008−26032号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1において、車両と本線道路との方位差が所定値以上となったタイミングで、車両マークが地図において本線道路から側道上へと急激に遷移することとなり、車両マークの表示が不自然となるという問題があった。
本発明は、上記課題に鑑みてなされたものであり、分岐地点を走行する場合に車両マークの表示が不自然となることを防止することを目的とする。
【課題を解決するための手段】
【0005】
上記の目的を達成するため、本発明において、第1変速手段は、分岐地点の通過前から通過後にわたる第1期間において、地図に対する車両マークの移動速度を車速に対応する移動速度よりも小さくする。これにより、車両が分岐地点に到達するよりも遅く、地図に示す分岐地点の位置に車両マークを到達させることができる。すなわち、車両が分岐地点に到達してからしばらくの期間は、地図に示す分岐地点の位置に車両マークが到達しない。従って、当該期間において、車両が分岐地点の通過後に走行する走行道路に対応する位置へ車両マークを移動させなくてもよく、車両が分岐地点の通過後に走行する走行道路の特定結果に影響されることなく車両マークを表示することができる。すなわち、車両が分岐地点に到達した後において、車両が分岐地点の通過後に走行する走行道路の特定結果が不安定になる場合であっても、車両マークの表示が不自然となることはない。
【0006】
また、第1期間において車両マークが示す位置に対して現在位置が先行することとなる。車両マークが示す位置に対して現在位置が先行する先行距離は、第1期間において時間が経過するほど増加し、第1期間の終期において最大となる。第2変速手段は、第1期間の後の第2期間において、地図に対する車両マークの移動速度を車速に対応する移動速度よりも大きくする。これにより、第1期間の終期において最大となった先行距離を第2期間において縮小していくことができる。すなわち、第2期間においては、時間の経過とともに、車両マークが示す位置と現在位置とを近づけていくことができ、車両マークが正確に現在位置を示すようにしていくことができる。すなわち、第1期間と第2期間とにおいて車両マークが示す位置に対して現在位置が先行する先行距離が生じるが、それ以外の期間においては車両マークが正確に現在位置を示すようにすることができる。
【0007】
なお、地図に示される分岐地点の位置に車両マークが到達した後においては、車両が分岐地点の通過後に走行する走行道路に対応する位置へ車両マークを移動させる必要性が生じる。車両が分岐地点を通過したにも拘わらず、地図に示される分岐地点の位置にて車両マークが停留すると不自然となるからである。そこで、車両が走行している走行道路を特定する走行道路特定手段を備えさせるとともに、地図に示される分岐地点の位置に車両マークが到達した後においては、現在において特定された走行道路に沿った位置を示すように車両マークを移動させるのが望ましい。ここで、地図に示される分岐地点の位置に車両マークが到達した後では、すでに分岐地点の通過後に車両が前記先行距離だけ走行しているため、車両が分岐地点の通過後に走行する走行道路についての情報が少なくとも前記先行距離に対応する分は得られていることとなる。例えば、走行道路を現在までの走行軌跡に基づいて特定する場合、車両が分岐地点の通過後に走行する走行道路についての走行軌跡が少なくとも前記先行距離の分は得られていることとなり、当該走行軌跡に基づいて走行道路を特定することができる。
【0008】
なお、車速に対応する車両マークの移動速度とは、車速に地図の縮尺を乗算することにより得られる。例えば、車速がV[km/時]で地図の縮尺が1/Hである場合には、車速に対応する車両マークの移動速度はV/H[km/時]に換算できる。ここで、車両情報取得手段は車両の現在位置と車速とを示す車両情報を取得するものであればよく、表示制御装置が現在位置と車速とを計測するセンサ等を備えてもよいし、現在位置と車速とを計測するセンサ等を備えた別の装置から表示制御装置が通信等によって車両情報を取得してもよい。表示制御手段は、表示制御装置が備える表示部、または、他の装置が備える表示部に対して車両マークと地図とを表示可能な情報を出力すればよい。また、地図は、少なくとも分岐地点に接続する道路と分岐地点とが示されるものであればよく、例えば分岐地点に接続する道路と分岐地点とを模式的に図示した模式図であってもよい。車両マークは、地図との相対位置によって車両の位置を示すものであればよく、車両が移動した場合に、車両マークのみが移動してもよいし、地図のみが移動してもよいし、車両マークと地図の双方が移動してもよい。
【0009】
分岐地点は、車両が分岐地点を通過する前に走行する道路を含め3以上の道路が接続する地点であり、分岐地点の通過後に走行可能な道路が2以上接続する地点である。本発明は、分岐地点の通過後に走行する走行道路を特定する確度が低くなる場合に好適であり、分岐地点に接続する道路の形状や接続角度に基づいて本発明を適用するか否かを切り替えてもよい。また、分岐地点に接続する道路の道路属性に応じて本発明を適用するか否かを切り替えてもよい。例えば、極めて低速で走行したり、停止することが予測される道路属性の道路が接続する場合には、運転者が車両マークを注視して現在位置を確認することが想定され、運転者に違和感を与える可能性があるため、本発明を適用しないようにしてもよい。
【0010】
さらに、第1期間は、車両が分岐地点を通過する前の時刻を始期とし、車両が分岐地点を通過した後の時刻を終期とする期間であればよい。一方、第2期間は第1期間の後の期間であればよく、第2期間が第1期間に連続してもよいし、第1期間と第2期間との間に他の期間が介在してもよい。いずれにしても、第2期間が第1期間よりも後であれば、第1期間において生じた先行距離を第2期間において縮小することができる。
また、第1期間と第2期間の始期と終期とは、車両の現在位置や車両マークが示す位置が所定位置となる時刻によって特定されてもよい。この場合、第1期間や第2期間は所定の区間を現在位置や車両マークが示す位置が移動する期間に対応する。
さらに、第1期間と第2期間の始期と終期とは、車両の現在位置と車両マークが示す位置との相対位置が所定の関係となる時刻によって特定されてもよい。例えば、車両の現在位置と車両マークが示す位置とが所定距離よりも離間した時刻や、所定距離よりも接近した時刻を第1期間と第2期間の始期と終期としてもよい。
さらに、第1期間と第2期間の始期と終期とは、所定の基準時刻から所定時間経過した時刻であってもよい。例えば、第1期間の始期を基準時刻とした場合には、第1期間の始期から所定時間経過した時刻を第1期間の終期や、第2期間の始期や終期とすることができる。
【0011】
第1変速手段は車速に対応する移動速度よりも小さくなるように車両マークの移動速度を制御すればよく、第1期間において車両マークの移動速度は一定であってもよいし、変動してもよい。例えば、車両マークの移動速度を、車速に対して1より小さい係数を乗じた速度に対応する移動速度とする場合には、車速の変動に追従して車両マークの移動速度も変動することとなる。車速に対応する移動速度と、車両マークの移動速度とを乖離させるほど、先行距離を増大させることができる。また、第2期間においても、車両マークの移動速度は一定であってもよいし、非一定であってもよい。第2期間において、車速に対応する移動速度と、車両マークの移動速度とを乖離させるほど、先行距離の縮小を促進することができる。
【0012】
ところで、分岐地点の通過後に車両が走行した距離が長くなるほど、分岐地点の通過後に走行した道路についての情報がより多く得られるため、車両が分岐地点の通過後に走行する走行道路を高い確度で特定することができる。従って、地図に示される分岐地点の位置に車両マークが到達するまでに、車両が分岐地点の通過後に走行する距離が長くなるようにするのが望ましい。
ここで、車両マークが地図に示される分岐地点の位置に到達する段階では、車両マークが示す位置に対して現在位置が先行する先行距離だけ、車両が分岐地点の通過後に走行することとなる。従って、車両マークが示す位置に対して現在位置が先行する先行距離が最大となる第1期間の終期において車両マークが地図に示される分岐地点の位置に到達するようにすれば、地図に示される分岐地点の位置に車両マークが到達するまでに、車両が分岐地点の通過後に走行する距離を最大とすることができる。すなわち、第1期間の終期において車両マークが地図に示される分岐地点の位置に到達するようにすれば、車両マークが地図に示される分岐地点の位置に到達するまでに高い確度で走行道路を特定しておくことができる。
【0013】
なお、車両が複数の分岐地点を連続して通過する場合、第1期間と第2期間とが交互に繰り返して到来することとなる。従って、連続する分岐地点間の距離が短い場合には、先に通過した分岐地点に関する第2期間が終了する前に、後に通過する分岐地点に関する第1期間が開始する場合も考えられる。この場合、車両マークが示す位置が正確に車両の現在位置を示さない期間が長期にわたって継続することとなるため、車両マークを表示させる本来の目的からして望ましくない。従って、連続する分岐地点間の距離が小さいほど第1期間を短くし、車両マークが示す位置が正確に車両の現在位置を示す期間を設けるのが望ましい。
【0014】
ところで、第1期間が長いほど、車両マークが示す位置に対して現在位置が先行する先行距離が長くなる。この先行距離が長いほど高い確度で走行道路を特定することができるが、分岐地点の通過後に走行可能な複数の道路の形状の類似性が低ければ、先行距離を長く確保しなくても高い確度で走行道路を特定することができる。従って、分岐地点の通過後に走行可能な複数の道路の形状の類似性が低いほど第1期間を短くすることにより、車両マークが示す位置が正確に車両の現在位置を示す期間をできるだけ長く確保するのが望ましい。
【0015】
なお、本発明のように、車両マークの移動速度を変速させる手法は、この処理を行う方法やプログラムとしても適用可能である。また、以上のような表示制御装置、方法、プログラムは、単独の装置として実現される場合もあれば、複数の装置として実現される場合もある。また、車両に備えられる各部と共有の部品を利用して実現される場合もあれば、車両に搭載されない各部と連携して実現される場合もあり、各種の態様を含むものである。また、一部がソフトウェアであり一部がハードウェアであったりするなど、適宜、変更可能である。さらに、表示制御装置を制御するプログラムの記録媒体としても発明は成立する。むろん、そのソフトウェアの記録媒体は、磁気記録媒体であってもよいし光磁気記録媒体であってもよいし、今後開発されるいかなる記録媒体においても全く同様に考えることができる。
【図面の簡単な説明】
【0016】
【図1】表示制御装置を含むナビゲーション装置を示すブロック図である。
【図2】現在位置と車両マークが示す位置とを比較して示す図である。
【図3】表示制御処理を示すフローチャートである。
【図4】連続する狭角分岐地点を示す模式図である。
【図5】分岐表示制御処理を示すフローチャートである。
【発明を実施するための形態】
【0017】
ここでは、下記の順序に従って本発明の実施の形態について説明する。
(1)表示制御装置の構成:
(2)表示制御処理:
(3)分岐表示制御処理:
(4)他の実施形態:
【0018】
(1)表示制御装置の構成:
図1は、車両に搭載された表示制御装置の構成を示すブロック図である。本実施形態において表示制御装置は、ナビゲーション装置10によって実現される。ナビゲーション装置10は、CPU、RAM、ROM等を備える制御部20を備えており、制御部20はROMに記憶されたプログラムを実行する。制御部20は、このプログラムの一つとして表示制御プログラム21を実行する。
【0019】
車両は、GPS受信部40、車速センサ41、ジャイロセンサ42、ユーザI/F部43を備える。GPS受信部40は、GPS衛星からの電波を受信し、図示しないインタフェースを介して車両の現在位置を算出するための信号を示す信号を出力する。制御部20は、この信号を取得して車両の現在位置を取得する。車速センサ41は、車両が備える車輪の回転速度に対応した信号を出力する。制御部20は、図示しないインタフェースを介してこの信号を取得し、車速を取得する。ジャイロセンサ42は、車両の水平面内の旋回についての角加速度を検出し、車両の向きに対応した信号を出力する。制御部20は図示しないインタフェースを介してこの信号を取得し、車両の走行方向を取得する。GPS受信部40と車速センサ41とジャイロセンサ42とが出力する信号は車両情報に相当する。ユーザI/F部43は、運転者の指示を入力し、また運転者に各種の情報を提供するためのインタフェース部であり、図示しないタッチパネルディスプレイやスイッチ、スピーカ等を備えている。ユーザI/F部43は信号を制御部20から受信し、地図と車両マークとをタッチパネルディスプレイに表示する。
【0020】
記憶媒体30には地図情報30aと道路テーブル30bとが記録されている。地図情報30aは、車両が走行する道路の端点に対応するノードを示すノードデータ、ノード間の道路の形状を特定するための形状補間点データ、ノード同士の連結を示すリンクデータ等を含む。すなわち、制御部20は、地図情報30aに基づいて、端点(始点および終点)がノードによって定義された道路ごとに道路の形状を特定することが可能である。3以上の道路が共通のノードを端点とする場合には、当該ノードは分岐地点に対応する。すなわち、いずれかの道路から進入し、進入した道路とは異なる2以上の道路に退出可能な地点が分岐地点である。なお、本明細書では、分岐地点において2つの道路が道なりに接続する場合でも、これらの道路は互いに異なる道路であるとする。本実施形態では、車両が分岐地点に進入する段階において、分岐地点から退出可能な道路に、分岐地点からの退出方向の角度差が所定の閾値(例えば、30度。)よりも小さくなる少なくとも一対の道路が含まれる分岐地点を狭角分岐地点とする。
【0021】
道路テーブル30bは、車両が走行する可能性が高い道路に関する道路データ(ノードデータ、リンクデータ、形状補間点データ等)が登録されたテーブルであって、地図情報30aから抽出して生成されるデータである。なお、車両が走行する可能性が高い道路とは、車両が現在走行する走行道路に対して進行方向前方側にて接続する道路等である。制御部20は、道路テーブル30bを参照することにより、車両が走行する可能性のある道路の形状を取得することができる。
【0022】
制御部20は、表示制御プログラム21を実行することにより、車両の位置を示す車両マークを表示させる処理を行う。表示制御プログラム21は、走行道路特定部21aと現在位置補正部21bと表示制御部21cと第1変速部21dと第2変速部21eとを備えている。走行道路特定部21aは、車両が走行している走行道路を特定する機能を制御部20に実行させるモジュールである。すなわち、走行道路特定部21aの機能により制御部20は、ジャイロセンサ42の出力信号に基づく走行方向と、車速センサ41の出力信号に基づく車速とに基づいて車両の走行軌跡を特定し、当該走行軌跡の形状との相関性の高い形状を有する道路を走行道路として特定する。
【0023】
現在位置補正部21bは、GPS受信部40の出力信号に基づく現在位置を補正する機能を制御部20に実行させるモジュールである。すなわち、現在位置補正部21bの機能により制御部20は、GPS受信部40の出力信号に基づく現在位置を取得し、当該現在位置を走行道路特定部21aの機能によって特定された走行道路上の位置に近づくように補正する。すなわち、GPS受信部40の出力信号に基づく現在位置は測位誤差の影響を受けるが、走行道路上の位置に近づくように現在位置を補正することにより、車両が存在する位置として確からしい位置へと現在位置を補正する。
【0024】
表示制御部21cは、車両の位置を示す車両マークと地図とを表示部に表示させる機能を制御部20に実行させるモジュールである。すなわち、表示制御部21cの機能により制御部20は、地図と車両マークを示す画像を生成し、当該画像に基づく信号をユーザI/F部43に出力する。具体的には、制御部20は、地図情報30aに基づいて生成した地図を示す画像に対して車両マークを示す画像を重畳することにより、前記画像を生成する。なお、本明細書において、"車両マークの位置"は地図に対する車両マークの相対位置を示し、"車両マークの移動速度"は地図に対する車両マークの相対速度を示す。一方、"車両マークが示す位置"は車両マークによって表される実空間の位置を示す。表示制御部21cの機能により制御部20は、地図を示す画像に対して車両マークを示す画像を重畳する相対的な位置を、現在位置補正部21bの機能によって補正された現在位置に基づいて逐次更新していくことにより、地図と車両マークとを相対的に移動させる。すなわち、表示制御部21cの機能により制御部20は、地図に対する車両マークの移動速度を車速に対応する移動速度とする。また、現在位置は走行道路特定部21aの機能によって特定された走行道路に近づくように補正されるため、前記走行道路に沿った位置を示すように車両マークが移動することとなる。ただし、後述する第1期間と第2期間において、制御部20は、地図に対する車両マークの移動速度を第1変速部21d、第2変速部21eの機能が設定した移動速度とする。以下、第1変速部21d、第2変速部21eの機能について説明する。
【0025】
第1変速部21dは、狭角分岐地点の通過前から通過後にわたる第1期間において、地図に対する車両マークの移動速度を車速に対応する移動速度よりも小さくする機能を制御部20に実行させるモジュールである。
図2は狭角分岐地点を車両が通過する様子を模式的に示す図である。図2において、狭角分岐地点において道路A〜Cが接続しており、車両が道路Aから狭角分岐地点に進入し、狭角分岐地点から道路Bに退出する様子を示している。図2左では車両の現在位置の実空間における推移を黒い正方形のポインタで示し、図2右では車両マークが示す位置の実空間における推移を三角形のポインタで示している。各ポインタには時刻t1〜t4が対応づけて示されており、これらの時刻t1〜t4における現在位置および車両マークが示す位置を各ポインタが示している。
【0026】
ここで、第1期間とは、第1変速部21dの機能により設定される第1区間を車両が走行する期間である。第1区間の終点は狭角分岐地点よりも距離Xだけ下流側の位置である。なお、本明細書において、狭角分岐地点から見て車両が狭角分岐地点に進入する前に走行する位置の方向を上流側とし、狭角分岐地点から見て車両が狭角分岐地点を退出した後に走行する位置の方向を下流側とする。狭角分岐地点から第1区間の終点までの距離Xは、例えば走行道路特定部21aの機能により、車両が狭角分岐地点の走行後に走行する走行道路が道路Aであるのか道路Bであるのかを特定できるまでに車両が狭角分岐地点の走行後に走行すべき距離とされる。なお、車両が狭角分岐地点の通過後に走行した距離Xが長いほど、道路A,Bの形状をより反映させた走行軌跡が得られ、走行道路特定部21aの機能により制御部20は、車両が狭角分岐地点から退出した走行道路を高い確度で特定することができる。
【0027】
第1変速部21dの機能により制御部20は、車速センサ41の出力信号に基づく車速V(t)よりも小さい速度に対応する移動速度を第1期間における車両マークの地図に対する移動速度として設定する。本実施形態では、車速V(t)に1よりも小さい変速係数k1を乗じた速度k1V(t)に対応する移動速度を第1期間における車両マークの地図に対する移動速度とする。また、車速V(t)は時刻tの関数であり、変速係数k1は定数である。以上のように1よりも小さい変速係数k1を設定することにより、第1期間において、車速V(t)よりも小さい速度k1V(t)に対応する移動速度を車両マークの地図に対する移動速度として設定することができる。これにより、車両マークが示す位置に対して現在位置が先行し(下流側となり)、車両マークが示す位置に対して現在位置が先行する先行距離が時間の経過とともに増大する。なお、第1期間の始期の時刻t1において、車両マークが示す位置と現在位置とは一致している。また、時刻t2は、車両が分岐地点に到達する時刻tである。
【0028】
本実施形態では、車両が第1区間の終点に到達する時刻t3、すなわち狭角分岐地点の通過後に距離Xだけ車両が走行した時刻t3において車両マークが地図にて示される狭角分岐地点の位置に到達するように、第1変速部21dの機能により制御部20は、第1区間の区間長Zを設定する。車両が狭角分岐地点の退出後に距離Xだけ走行した時刻t3において車両マークが地図にて示される狭角分岐地点の位置に到達するため、第1区間の区間長Zから距離Xを減じた距離(Z−X)が第1期間において車両マークが示す位置が移動する距離となる。車両が第1期間(t1〜t3)に走行する距離(区間長Z)は、以下の(1)式で表される。
【数1】
一方、第1期間において車両マークが示す位置が移動する距離(Z−X)は、以下の(2)式で表される。
【数2】
【0029】
前記の(1),(2)式により、第1期間において車両マークが示す位置が移動する距離(Z−X)は、車両が第1期間に走行する距離(区間長Z)に変速係数k1を乗算した距離k1Zとなり、この関係はどのように車速V(t)が推移しても成立する。さらに、前記の(1),(2)式をZに関して解くと、以下の(3)式のようになる。
【数3】
例えば、X=50[m]とし、k1=0.75とした場合には、Z=200[m]となり、狭角分岐地点よりも距離(Z−X)=150[m]だけ上流側の位置が第1区間の始点となる。
【0030】
第2変速部21eは、第1期間に続く第2期間において、地図に対する車両マークの移動速度を車速に対応する移動速度よりも大きくする機能を制御部20に実行させるモジュールである。すなわち、第2変速部21eの機能により制御部20は、車速センサ41の出力信号に基づく車速V(t)に1よりも大きい変速係数k2を乗じた速度k2V(t)に対応する移動速度を第2期間における車両マークの地図に対する移動速度とする。また、第2変速部21eの機能により制御部20は、第2期間において、走行道路特定部21aの機能により車両が現在走行する道路として特定された走行道路に沿った位置を示すように車両マークを移動させる。すなわち、制御部20は、第2期間において、車両が狭角分岐地点の退出後に走行する走行道路を特定し、当該走行道路に沿った位置を示すように車両マークを移動させる。
【0031】
車両マークが示す位置に対して現在位置が先行する先行距離は第1期間の終期において距離Xとなるが、この先行距離が距離Xから時間の経過とともに縮小し、最終的には0となる。第2変速部21eの機能により制御部20は、第2期間において、車両マークが示す位置に対して現在位置が先行する先行距離が0となったか否かを判定し、当該先行距離が0となった時刻t4を第2期間の終期とする。また、第2期間において車両マークが示す位置が移動する距離は、車両が走行する距離Yに第2期間の始期における先行距離である距離Xを加算した距離(X+Y)となる。
【0032】
ここで、第2期間において車両が走行する距離Yは、以下の(4)式で表される。
【数4】
一方、第2期間において車両マークが示す位置が移動する距離(X+Y)は、以下の(5)式で表される。
【数5】
前記の(4),(5)式により、第2期間において車両マークが示す位置が移動する距離(X+Y)は、車両が第2期間に走行する距離Yに変速係数k2を乗算した距離k2Zとなる。前記の(4),(5)式をYに関して解くと、以下の(6)式のようになる。
【数6】
例えば、X=50[m]とし、k1=2とした場合には、Y=50[m]となり、狭角分岐地点よりも距離(X+Y)=100[m]だけ下流側の位置を車両が走行する時刻t4が第2期間の終期となる。第2期間において車両が走行する区間を第2区間とすると、第2区間の始点は狭角分岐地点から距離Xだけ下流側の位置となり、第2区間の終点は狭角分岐地点から距離(X+Y)だけ下流側の位置となる。
【0033】
以上のように構成した本実施形態では、制御部20は、分岐地点の通過前から通過後にわたる第1期間において、地図に対する車両マークの移動速度を車速V(t)に対応する移動速度よりも小さくする。これにより、車両が分岐地点に到達するよりも遅く、地図に示す分岐地点の位置に車両マークを到達させることができる。すなわち、車両が分岐地点に到達してからしばらくの期間は、地図に示す分岐地点の位置に車両マークが到達しない。従って、当該期間において、車両が分岐地点の通過後に走行する走行道路に対応する位置へ車両マークを移動させなくてもよく、車両が分岐地点の通過後に走行する走行道路の特定結果に影響されることなく車両マークを表示することができる。すなわち、車両が分岐地点に到達した直後において、車両が分岐地点の通過後に走行する走行道路の特定結果が不安定になる場合であっても、車両マークの表示が不自然となることはない。
【0034】
また、本実施形態では、地図に示される分岐地点の位置に車両マークが到達した後の第2期間においては、現在において特定された走行道路に沿った位置を示すように車両マークを移動させている。ここで、地図に示される分岐地点の位置に車両マークが到達した後の第2期間においては、すでに分岐地点の通過後に車両が前記先行距離だけ走行しているため、車両が分岐地点の通過後に走行する走行道路についての走行軌跡が少なくとも前記先行距離に対応する分は得られていることとなる。従って、当該走行軌跡に基づいて車両が分岐地点の通過後に走行する走行道路を高い確度で特定することができる。
【0035】
また、第1期間において車両マークが示す位置に対して現在位置が先行する先行距離は、第1期間において時間が経過するほど増加し、第1期間の終期において最大の距離Xとなる。制御部20は、第1期間の後の第2期間において、地図に対する車両マークの移動速度を車速に対応する移動速度よりも大きくする。これにより、第1期間の終期において最大となった先行距離を第2期間において縮小していくことができる。すなわち、第2期間においては、時間の経過とともに、車両マークが示す位置と現在位置とを近づけていくことができ、車両マークが正確に現在位置を示すようにしていくことができる。すなわち、第1期間と第2期間とにおいて車両マークが示す位置に対して現在位置が先行する先行距離が生じるが、それ以外の期間においては車両マークが正確に現在位置を示すようにすることができる。
【0036】
また、車両マークが示す位置に対して現在位置が先行する先行距離が最大の距離Xとなる第1期間の終期において、地図に示される狭角分岐地点の位置に車両マークを到達させるため、地図に示される狭角分岐地点の位置に車両マークが到達するまでに車両が狭角分岐地点の通過後に走行する距離も最大の距離Xとすることができる。すなわち、第1期間の終期において車両マークを地図に示される狭角分岐地点の位置に到達させるため、車両マークが地図に示される狭角分岐地点の位置に到達する段階において、高い確度で走行道路を特定することができる。車両が狭角分岐地点の通過後に走行した距離が長くなるほど、狭角分岐地点の通過後に走行した走行道路(道路B)の形状の特徴をより反映した走行軌跡が得られるからである。
【0037】
(2)表示制御処理:
図3は、表示制御処理を示すフローチャートである。表示制御処理は所定の更新周期ごとに繰り返して実行されるループ処理であり、表示制御処理が1ループ実行されるごとに地図に対する車両マークの相対位置が更新される。表示制御部21cの機能により制御部20は、ステップS100において所定の更新周期が経過したか否かを判定し、更新周期が経過するまで待機する。更新周期が経過した場合には、ステップS110において走行道路特定部21aの機能により制御部20は走行道路を特定する。すなわち、走行道路特定部21aの機能により制御部20は、ジャイロセンサ42の出力信号に基づく車両方向と、車速センサ41の出力信号に基づく車速とに基づいて車両の走行軌跡を特定し、当該走行軌跡の形状との相関性の高い形状を有する道路を走行道路として特定する。また、走行道路特定部21aの機能により制御部20は、道路テーブル30bに道路データが登録された道路を候補として、走行道路の特定を行う。すなわち、道路テーブル30bに道路データが登録された道路のうち走行軌跡と最も形状が相関する道路が走行道路であると特定される。
【0038】
ステップS120において、表示制御部21cの機能により制御部20は、現在が通常期間に属するか否かを判定する。なお、通常期間とは上述の第1期間と第2期間のいずれでもない期間を意味する。また、制御部20は、現在が属する期間を特定するためのフラグを記録媒体30の所定アドレスに保持させており、当該フラグとして通常フラグが保持されていることをもって、現在が通常期間に属すると判定する。
【0039】
現在が通常期間に属する場合、表示制御部21cの機能により制御部20は、ステップS130において車両マークが示す位置を現在位置で更新する。表示制御部21cの機能により制御部20は、地図情報30aに基づいて生成した地図を示す画像に対して車両マークを示す画像を重畳することにより、前記画像を生成するとともに、当該画像に基づく信号をユーザI/F部43に出力する。現在が通常期間に属する場合、表示制御部21cの機能により制御部20は、地図を示す画像に対して車両マークを示す画像を重畳する位置を現在位置に対応する位置とする。なお、ここにおける現在位置とは、現在位置補正部21bの機能により補正された現在位置である。ステップS130を更新周期ごとに繰り返して実行することにより、通常期間においては現在位置の推移に追従するように地図に対して車両マークを移動させていくことができる。また、現在位置は、現在位置補正部21bの機能により補正されるため、地図に示される走行道路に沿って車両マークが移動するように車両マークと地図とが相対移動することとなる。
【0040】
一方、ステップS120において現在が通常期間に属さないと判定された場合、表示制御部21cの機能により制御部20は、ステップS140において分岐表示制御処理(ステップS160)にて車両マークの位置を更新することとする。すなわち、現在が第1期間と第2期間のいずれかに属する場合には、車両マークの位置の更新を後述する分岐表示制御処理で行うこととする。
【0041】
ステップS150において、走行道路特定部21aの機能により制御部20は、道路テーブル30bを更新する。すなわち、走行道路特定部21aの機能により制御部20は、車両が走行する可能性の高い道路を地図情報30aから抽出し、当該抽出した道路の形状を道路テーブル30bに登録する。図4に示すように、本実施形態では、ステップS110にて特定した現在の走行道路(G0と示す。)、当該走行道路の端点を示すノードであって車両の進行方向前方側のノードを共通のノードとして有する1次接続道路(G1と示す。)、および、当該1次接続道路のもう一方のノードを共通のノードとして有する2次接続道路(G2と示す。)とを抽出する。すなわち、走行道路と、当該走行道路に対して直接接続する1次接続道路と、当該1次接続道路に接続する2次接続道路を抽出する。そして、これらの各道路に関する道路データを道路テーブル30bに登録する。道路テーブル30bに道路データが登録された道路は、ステップS110において走行道路の候補となる。次のステップS160において、制御部20は、分岐表示制御処理を実行する。
【0042】
(3)分岐表示制御処理:
図5は、分岐表示制御処理を示すフローチャートである。ステップS200において、表示制御部21cの機能により制御部20は、現在が通常期間に属するか否かを判定する。現在が通常期間に属する場合、ステップS205において、第1変速部21dの機能により制御部20は、道路テーブル30bを参照して狭角分岐地点を検索する。上述のように狭角分岐地点は退出後に走行する走行道路の特定確度が低くなる分岐地点であり、具体的には、各道路へ車両が退出する場合の退出方向同士の角度差の最小値が30度よりも小さい分岐地点が狭角分岐地点となる。このような場合、分岐地点の退出直後の走行軌跡が互いに類似することとなり、前記一対の道路のどちらに退出したかを高い確度で特定することができなくなる。
【0043】
ステップS210において、第1変速部21dの機能により制御部20は、第1狭角分岐地点に対して車両が距離(Z−X)(図2A、参照。)以内まで接近しているか否かを判定する。すなわち、第1変速部21dの機能により制御部20は、車両が第1区間の始点を通過し、第1区間内に位置しているか否かを判定する。なお、本実施形態では、X=50[m]とし、k1=0.75,k2=2が規定値として与えられており、前記の各式によって距離Z,Yが予め設定されている。また、ステップS205において第1狭角分岐地点が検索されなかった場合には、第1狭角分岐地点に対して車両が距離(Z−X)以内まで接近していないと判定することとする。
【0044】
第1狭角分岐地点に対して車両が距離(Z−X)以内まで接近している場合、ステップS215において、第1変速部21dの機能により制御部20は、現在の走行道路と第1接続道路とが接続する第1狭角分岐地点(図4にてF1と示す。)と、第1接続道路と第2接続道路とが接続する第2狭角分岐地点(図4にてF2と示す。)との距離(第1狭角分岐地点と第2狭角分岐地点とを接続する第1接続道路の道なりの長さ)が所定の下限値Wよりも長いか否かを判定する。下限値Wは、以下の(7)式で表される。
【数7】
なお、前記の(7)式においてMは所定のマージン距離を示す。
【0045】
図4に示すように、第1狭角分岐地点と第2狭角分岐地点の双方に対して第1区間(R1と示す。)と第2区間(R2と示す。)とを設定する場合を想定する。そして、第1狭角分岐地点と第2狭角分岐地点との距離が下限値Wと等しくなるとき、第1狭角分岐地点に対して設定される第2区間の終点と第2狭角分岐地点に対して設定される第1区間の始点との間の距離がマージン距離Mと等しくなる。すなわち、第1狭角分岐地点と第2狭角分岐地点の双方に対して第1区間と第2区間とを設定した場合に、第1狭角分岐地点に対して設定された第2区間の終点と、第2狭角分岐地点に対して設定された第1区間の始点とがマージン距離Mよりも離間した位置関係となるか否かがステップS215では判定される。また、ステップS205において第1狭角分岐地点は検索されたが第2狭角分岐地点が検索されなかった場合には、第1狭角分岐地点と第2狭角分岐地点との距離が下限値Wよりも長いと判定する。例えば、マージン距離MはGPS受信部40や車速センサ41やジャイロセンサ42の誤差や現在位置等の計算誤差や更新周期の長さ等を考慮して30[m]と設定される。
【0046】
第1狭角分岐地点と第2狭角分岐地点との距離が所定の下限値Wよりも長い場合、ステップS220において、第1変速部21dの機能により制御部20は、第1期間フラグを設定する。そして、次の更新周期の経過を待つ(ステップS100)。一方、ステップS210において第1狭角分岐地点に対して車両が距離(Z−X)以内まで接近していないと判定された場合、または、ステップS215において第1狭角分岐地点と第2狭角分岐地点との距離が下限値W以下と判定された場合、第1期間フラグを設定することなく、次の更新周期の経過を待つ(ステップS100)。
【0047】
以上のように、ステップS200にて現在が通常期間に属すると判定された場合には、第1期間フラグを設定するための条件を満足するか否かの判定(S210〜S215)が順次行われ、条件を満足する場合には第1期間フラグを設定する。以上の処理を繰り返すことにより、通常期間においては現在位置に基づいて車両マークの位置を更新しつつ、第1狭角分岐地点についての第1区間に車両が進入した時点で第1期間フラグを設定することができる。なお、進入しようとする分岐地点が狭角分岐地点に該当しなければ、第1期間フラグを設定しない。これにより、分岐地点から退出した走行道路が高い確度で特定できる場合には、車両マークが正確に現在位置を示すようにすることができる。また、マージン距離Mが確保できない場合にも第1期間フラグを設定しない。これにより、第2期間の後に第1期間が連続することが防止でき、車両マークが示す位置が現在位置から乖離する期間が長期にわたって継続することが防止できる。なお、第1期間フラグを設定する時刻が第1期間の始期の時刻t1となる。
【0048】
次に、第1期間フラグが設定された場合の処理について説明する。まず、図3のステップS120において通常期間でないと判定されるため、ステップS140において分岐表示制御処理(ステップS160)にて車両マークの位置を更新することとする。すなわち、ステップS130において現在位置に基づく車両マークの位置の更新を行わない。なお、ステップS110における走行道路の特定と、ステップS150における道路テーブル30bの更新は通常期間と同様に行われる。図5のステップS200において現在が通常期間に属さないと判定され、ステップS225において現在が第1期間に属すると判定されることとなる。
【0049】
次のステップS230において、第1変速部21dの機能により制御部20は、車両マークが示す位置の移動距離を設定する。ここでは、第1変速部21dの機能により制御部20は、現在の車速V(t)に更新周期の1周期分の時間の長さを乗じることにより基準の移動距離を算出し、当該基準の移動距離に対して変速係数k1を乗じた距離を移動距離として設定する。すなわち、車両が前回の更新周期から現在までに現実に移動した距離に対して変速係数k1を乗じた距離を移動距離として設定する。
【0050】
ステップS235において、第1変速部21dの機能により制御部20は、第1区間の走行が終了したか否かを判定する。すなわち、第1変速部21dの機能により制御部20は、第1期間の始期から車両が走行した距離が第1区間の区間長Zと等しくなったか否かを判定する。第1区間の走行が終了した場合にはステップS240において第2期間フラグを設定してからステップS245を実行し、第1区間の走行が終了していない場合には第2期間フラグを設定することなくステップS245を実行する。ステップS245において、第1変速部21dの機能により制御部20は、前回の更新周期における車両マークが示す位置に対して、ステップS230にて設定した移動距離だけ下流側の位置へと車両マークの位置を更新する。ここでは、第1期間の始期の時刻t1において走行道路特定部21aの機能によって特定された走行道路(道路A)を取得し、車両マークが示す位置を当該走行道路に沿って前記移動距離だけ下流側とする。これを受けて、表示制御部21cの機能により制御部20は、更新された車両マークが示す位置に基づいて、地図を示す画像に対して車両マークを示す画像を重畳した画像に基づく信号をユーザI/F部43に出力する。
【0051】
以上のように、ステップS225にて現在が第1期間に属すると判定された場合には、車両マークが示す位置の更新周期ごとの移動距離が現実の車両の移動距離に対して1よりも小さい変速係数k1を乗じて得られた値とされる。従って、ステップS230,S245を繰り返して実行することにより、第1期間においては車速V(t)に対応する移動速度よりも小さい移動速度で車両マークが地図に対して移動することとなる。そして、車両が第1区間の終点を走行した段階で第2期間フラグが設定されることとなる。なお、本実施形態では、車両が第1区間の終点を走行した段階で第2期間フラグを設定することとしたが、地図にて示される狭角分岐地点の位置に車両マークが実際に到達した段階で第2期間フラグを設定してもよい。さらに、車両が第1区間の終点を走行するタイミングと、地図にて示される狭角分岐地点の位置に車両マークが実際に到達するタイミングとが一致するように、変速係数k1を時間に応じて調整してもよい。
【0052】
次に、ステップS240にて第2期間フラグが設定された場合の処理について説明する。まず、図3のステップS120において通常期間でないと判定されるため、ステップS140において分岐表示制御処理(ステップS160)にて車両マークの位置を更新することとする。第2期間の場合も、ステップS110における走行道路の特定と、ステップS150における道路テーブル30bの更新は通常期間と同様に行われる。図5のステップS200,S225においてそれぞれ現在が通常期間と第1期間とに属さないと判定され、ステップS250において現在が第2期間に属すると判定されることとなる。
【0053】
次のステップS255において、第2変速部21eの機能により制御部20は、車両マークが示す位置の移動距離を設定する。ここでは、第2変速部21eの機能により制御部20は、基準の移動距離に対して変速係数k2を乗じた距離を移動距離として設定する。ステップS260において、第2変速部21eの機能により制御部20は、前回の更新周期における車両マークが示す位置と、車両の現在位置とが一致するか否かを判定し、一致する場合にはステップS265において通常フラグを設定する。一方、前回の更新周期における車両マークが示す位置と、車両の現在位置とが一致しない場合には、ステップS270において、第2変速部21eの機能により制御部20は、前回の更新周期における車両マークが示す位置に対して、ステップS255にて設定した移動距離だけ下流側の位置へと車両マークの位置を更新する。ここでは、現在の更新周期のステップS110(図3)において走行道路特定部21aの機能によって特定された走行道路(道路B)を取得し、車両マークが示す位置を当該走行道路に沿って前記移動距離だけ下流側とする。これを受けて、表示制御部21cの機能により制御部20は、更新された車両マークが示す位置に基づいて、地図を示す画像に対して車両マークを示す画像を重畳した画像に基づく信号をユーザI/F部43に出力する。
【0054】
以上のように、ステップS250にて現在が第2期間に属すると判定された場合には、車両マークが示す位置の更新周期ごとの移動距離が現実の車両の移動距離に対して1よりも大きい変速係数k2を乗じて得られた値とされる。従って、ステップS255,S270を繰り返して実行することにより、第2期間においては現在位置に対応する移動速度よりも大きい移動速度で車両マークが地図に対して移動することとなる。そして、車両マークが示す位置が車両の現在位置に追い着いた段階で通常フラグが設定されることとなる。これにより、通常期間に移行し、ステップS130において現在位置に基づいて車両マークが示す位置が更新されることとなる。
【0055】
(4)他の実施形態:
以上の実施形態は本発明を実施するための一例であり、他にも種々の実施形態を採用可能である。例えば、前記実施形態では、マージン距離Mが確保できない場合に第1期間フラグを設定しないようにしたが、マージン距離Mが確保できるように他の距離Xや変速係数k1,k2を調整するようにしてもよい。前記の(3),(6)式において距離Xを短くするほど第1区間の区間長Zと第2区間の区間長Yを短くすることができる。前記の(7)式の右辺の値が小さくなり、第1狭角分岐地点と第2狭角分岐地点との距離の下限値Wを小さく緩和することができる。また、前記の(3)式において変速係数k1を小さくすることによっても第1区間の区間長Zを短くすることができ、前記の(6)式において変速係数k2を大きくすることによっても第2区間の区間長Yを短くすることができる。従って、変速係数k1,k2を調整することにより、第1狭角分岐地点と第2狭角分岐地点との距離の下限値Wを小さく緩和することができる。この場合、第1区間の区間長Zと第2区間の区間長Yが短くなるため、車両が第1区間および第2区間を走行する第1期間と第2期間も短くなる。
【0056】
また、前記実施形態では狭角分岐地点の退出後の走行道路の特定確度を確保するための距離Xを一定の値としたが、当該距離Xを狭角分岐地点から退出可能な道路の形状に応じて設定してもよい。例えば、狭角分岐地点から各道路に退出した場合の退出方向同士の角度の最小値が大きくなればなるほど、走行軌跡の類似性は低くなるため、車両が狭角分岐地点から退出した走行道路の特定確度は高くなる。従って、狭角分岐地点から各道路に退出した場合の退出方向同士の角度の最小値が大きくなればなるほど、距離Xを小さくしてもよい。この場合、前記の(3),(6)式の関係から第1区間の区間長Zと第2区間の区間長Yが短くなり、車両が第1区間および第2区間を走行する第1期間と第2期間も短くなる。さらに、高速道路上の狭角分岐地点に対して一般道路よりも距離Xを大きく設定してもよい。高速道路では車速V(t)が大きいため、距離Xが大きくなっても第1期間と第2期間が短くなるからである。
【0057】
なお、前記実施形態において、ナビゲーション装置10が現在位置と車速とを計測するセンサ等を備えてもよい。ナビゲーション装置10が表示部を備えていてもよい。また、地図は、少なくとも分岐地点に接続する道路と分岐地点とが示されるものであればよく、例えば狭角分岐地点に接続する道路と分岐地点とを模式的に図示した模式図であってもよい。車両マークは、地図との相対位置によって車両の位置を示すものであればよく、車両が移動した場合には、車両マークのみが移動してもよいし、地図のみが移動してもよいし、車両マークと地図の双方が移動してもよい。
【0058】
また、第2期間は第1期間の後の期間であればよく、第1期間と第2期間との間に他の期間が介在してもよい。この場合であっても、第2期間が第1期間よりも後であれば、第1期間において生じた先行距離を第2期間において縮小することができる。また、車両の現在位置と車両マークが示す位置とが所定距離よりも離間した時刻や、所定距離よりも接近した時刻を第1期間と第2期間の始期と終期としてもよい。さらに、第1期間と第2期間の始期と終期とは、所定の基準時刻から所定時間経過した時刻であってもよい。例えば、基準時刻としての第1期間の始期から所定時間経過した時刻を第1期間の終期や、第2期間の始期や終期としてもよい。
【0059】
第1変速手段は車速に対応する移動速度よりも小さくなるように車両マークの移動速度を制御すればよく、第1期間において車両マークの移動速度は一定としてもよい。一方、第2変速手段は車速に対応する移動速度よりも大きくなるように車両マークの移動速度を制御すればよく、第2期間において車両マークの移動速度は一定であってもよい。極めて低速で走行したり、停止することが予測される道路が狭角分岐地点に接続する場合には、運転者が車両マークを注視して現在位置を確認することが想定されるため、第1期間フラグを設定しないようにしてもよい。例えば、狭角分岐地点からいずれの道路に退出するのにも所定角度以上の旋回を伴う場合に、第1期間フラグを設定しないようにしてもよい。また、狭角分岐地点に細街路や駐車場への分岐道路等が接続する場合に、第1期間フラグを設定しないようにしてもよい。
【符号の説明】
【0060】
10…ナビゲーション装置、20…制御部、21…表示制御プログラム、21a…走行道路特定部、21b…現在位置補正部、21c…表示制御部、21d…第1変速部、21e…第2変速部、30…記録媒体、30a…地図情報、30b…道路テーブル、30c…駐車道路情報、40…GPS受信部、41…車速センサ、42…ジャイロセンサ、43…ユーザI/F部
【特許請求の範囲】
【請求項1】
車両の現在位置と車速とを示す車両情報を取得する車両情報取得手段と、
前記車両の位置を示す車両マークと地図とを表示部に表示させる表示制御手段と、
前記車両による分岐地点の通過前から通過後にわたる第1期間において、前記地図に対する前記車両マークの移動速度を前記車速に対応する移動速度よりも小さくする第1変速手段と、
前記第1期間の後の第2期間において、前記地図に対する前記車両マークの移動速度を前記車速に対応する移動速度よりも大きくする第2変速手段と、
を備える表示制御装置。
【請求項2】
前記車両が走行している走行道路を特定する走行道路特定手段を備え、
前記表示制御手段は、前記地図に示される前記分岐地点の位置に前記車両マークが到達した後において、現在において特定された前記走行道路に沿った位置を示すように前記車両マークを移動させる、
請求項1に記載の表示制御装置。
【請求項3】
前記第1変速手段は、前記分岐地点の通過後に前記車両が所定距離走行するタイミングを前記第1期間の終期とし、前記第1期間の終期において前記車両マークが前記地図に示される前記分岐地点の位置に到達するように前記所定距離を設定する、
請求項1または請求項2のいずれかに記載の表示制御装置。
【請求項4】
前記第1変速手段は、前記車両が前記分岐地点の通過後に走行可能な道路に他の分岐地点が存在する場合に、前記分岐地点と前記他の分岐地点との間の距離が小さいほど前記第1期間を短くする、
請求項1から請求項3のいずれか一項に記載の表示制御装置。
【請求項5】
前記第1変速手段は、前記車両が前記分岐地点の通過後に走行可能な複数の道路の形状の類似性が低いほど前記第1期間を短くする、
請求項1から請求項4のいずれか一項に記載の表示制御装置。
【請求項6】
車両の現在位置と車速とを示す車両情報を取得する車両情報取得工程と、
前記車両の位置を示す車両マークと地図とを表示部に表示させる表示制御工程と、
前記車両による分岐地点の通過前から通過後にわたる第1期間において、前記地図に対する前記車両マークの移動速度を前記車速に対応する移動速度よりも小さくする第1変速工程と、
前記第1期間の後の第2期間において、前記地図に対する前記車両マークの移動速度を前記車速に対応する移動速度よりも大きくする第2変速工程と、
を含む表示制御方法。
【請求項7】
車両の現在位置と車速とを示す車両情報を取得する車両情報取得機能と、
前記車両の位置を示す車両マークと地図とを表示部に表示させる表示制御機能と、
前記車両による分岐地点の通過前から通過後にわたる第1期間において、前記地図に対する前記車両マークの移動速度を前記車速に対応する移動速度よりも小さくする第1変速機能と、
前記第1期間の後の第2期間において、前記地図に対する前記車両マークの移動速度を前記車速に対応する移動速度よりも大きくする第2変速機能と、
をコンピュータに実行させる含む表示制御プログラム。
【請求項1】
車両の現在位置と車速とを示す車両情報を取得する車両情報取得手段と、
前記車両の位置を示す車両マークと地図とを表示部に表示させる表示制御手段と、
前記車両による分岐地点の通過前から通過後にわたる第1期間において、前記地図に対する前記車両マークの移動速度を前記車速に対応する移動速度よりも小さくする第1変速手段と、
前記第1期間の後の第2期間において、前記地図に対する前記車両マークの移動速度を前記車速に対応する移動速度よりも大きくする第2変速手段と、
を備える表示制御装置。
【請求項2】
前記車両が走行している走行道路を特定する走行道路特定手段を備え、
前記表示制御手段は、前記地図に示される前記分岐地点の位置に前記車両マークが到達した後において、現在において特定された前記走行道路に沿った位置を示すように前記車両マークを移動させる、
請求項1に記載の表示制御装置。
【請求項3】
前記第1変速手段は、前記分岐地点の通過後に前記車両が所定距離走行するタイミングを前記第1期間の終期とし、前記第1期間の終期において前記車両マークが前記地図に示される前記分岐地点の位置に到達するように前記所定距離を設定する、
請求項1または請求項2のいずれかに記載の表示制御装置。
【請求項4】
前記第1変速手段は、前記車両が前記分岐地点の通過後に走行可能な道路に他の分岐地点が存在する場合に、前記分岐地点と前記他の分岐地点との間の距離が小さいほど前記第1期間を短くする、
請求項1から請求項3のいずれか一項に記載の表示制御装置。
【請求項5】
前記第1変速手段は、前記車両が前記分岐地点の通過後に走行可能な複数の道路の形状の類似性が低いほど前記第1期間を短くする、
請求項1から請求項4のいずれか一項に記載の表示制御装置。
【請求項6】
車両の現在位置と車速とを示す車両情報を取得する車両情報取得工程と、
前記車両の位置を示す車両マークと地図とを表示部に表示させる表示制御工程と、
前記車両による分岐地点の通過前から通過後にわたる第1期間において、前記地図に対する前記車両マークの移動速度を前記車速に対応する移動速度よりも小さくする第1変速工程と、
前記第1期間の後の第2期間において、前記地図に対する前記車両マークの移動速度を前記車速に対応する移動速度よりも大きくする第2変速工程と、
を含む表示制御方法。
【請求項7】
車両の現在位置と車速とを示す車両情報を取得する車両情報取得機能と、
前記車両の位置を示す車両マークと地図とを表示部に表示させる表示制御機能と、
前記車両による分岐地点の通過前から通過後にわたる第1期間において、前記地図に対する前記車両マークの移動速度を前記車速に対応する移動速度よりも小さくする第1変速機能と、
前記第1期間の後の第2期間において、前記地図に対する前記車両マークの移動速度を前記車速に対応する移動速度よりも大きくする第2変速機能と、
をコンピュータに実行させる含む表示制御プログラム。
【図1】

【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2011−253103(P2011−253103A)
【公開日】平成23年12月15日(2011.12.15)
【国際特許分類】
【出願番号】特願2010−127860(P2010−127860)
【出願日】平成22年6月3日(2010.6.3)
【出願人】(000100768)アイシン・エィ・ダブリュ株式会社 (3,717)
【Fターム(参考)】
【公開日】平成23年12月15日(2011.12.15)
【国際特許分類】
【出願日】平成22年6月3日(2010.6.3)
【出願人】(000100768)アイシン・エィ・ダブリュ株式会社 (3,717)
【Fターム(参考)】
[ Back to top ]