
表示制御装置
【課題】 車両の周辺の映像以外の映像と、車両の周辺の映像とを表示装置に同時に表示させることができる表示制御装置を提供する。
【解決手段】 車両の周辺の映像である周辺映像を撮るカメラ11a〜11fと、周辺映像を表示するディスプレイ12とが搭載された車両に搭載されてディスプレイ12の表示を制御する制御装置18において、CPU18bは、カメラ11a〜11fのそれぞれによって撮られた周辺映像をディスプレイ12の表示画面上の別々の表示領域に表示させ、周辺映像以外の映像である他の画像に対して周辺映像を透過させて表示画面上に表示させ、車両の周辺の地図情報と、車両の位置と、車両の進行方向とに応じて他の画像に対する周辺映像の透過率を設定する。
【解決手段】 車両の周辺の映像である周辺映像を撮るカメラ11a〜11fと、周辺映像を表示するディスプレイ12とが搭載された車両に搭載されてディスプレイ12の表示を制御する制御装置18において、CPU18bは、カメラ11a〜11fのそれぞれによって撮られた周辺映像をディスプレイ12の表示画面上の別々の表示領域に表示させ、周辺映像以外の映像である他の画像に対して周辺映像を透過させて表示画面上に表示させ、車両の周辺の地図情報と、車両の位置と、車両の進行方向とに応じて他の画像に対する周辺映像の透過率を設定する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、表示装置の表示を制御する表示制御装置に関するものである。
【背景技術】
【0002】
従来の表示制御装置としては、自車両の左側方の画像と、自車両の右側方の画像との表示画面上での比率を、交差点における移動体の有無によって変えるものが知られている(例えば、特許文献1参照。)。
【0003】
【特許文献1】特開2002−225628号公報(第5−7頁、第5−12図)
【発明の開示】
【発明が解決しようとする課題】
【0004】
しかしながら、従来の表示制御装置においては、自車両の左側方の画像と、自車両の右側方の画像とを表示画面全体に表示するので、自車両の左側方の画像及び自車両の右側方の画像を表示画面に表示しているときには、自車両の左側方の画像及び自車両の右側方の画像以外の画像を表示画面に表示することができないという問題があった。
【0005】
本発明は、従来の問題を解決するためになされたもので、車両の周辺の映像以外の映像と、車両の周辺の映像とを表示装置に同時に表示させることができる表示制御装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
本発明の表示制御装置は、各撮影装置で得られた撮影画像と他の画像とを表示装置の表示領域に重畳表示させ、各撮影装置で得られた撮影画像をそれぞれ異なる表示領域で表示させる表示制御装置であって、記憶媒体上のデータが示す車両の状況および道路の状況に応じて前記撮影画像と前記他の画像との相対透過率を前記表示領域ごとに異ならせて表示させる制御手段を備えた構成を有している。
【0007】
この構成により、本発明の表示制御装置は、他の画像に対して撮影画像を表示装置の表示画面上で透過させるので、他の画像と撮影画像とを表示装置に同時に表示させることができる。ここで、「重畳表示させ」とは、一の画像および他の画像をそれぞれ正面および背面に表示させることをいう。また、「各撮影装置で得られた撮影画像をそれぞれ異なる表示領域で表示させる」とは、表示領域を複数に区分してなる区分領域を定義し、一の撮影装置で得られた撮影画像および他の撮影装置で得られた撮影画像をそれぞれ一の区分領域および他の区分領域に表示させることをいう。また、「記憶媒体上のデータが示す車両の状況および道路の状況」とは、記憶媒体上のデータが示す車両の状況および記憶媒体上のデータが示す道路の状況をいう。また、「記憶媒体」とは、データを記憶する装置であって、ROM、RAMやHDDなどをいう。また、「記憶媒体上のデータが示す」とは、各種デバイス等で出力された記憶媒体上に保持されたデータまたは予め記憶媒体上に記憶されたデータをいう。また、「車両の状況」としては、速度センサで出力されたデータが示す車両の速度、方位センサで出力されたデータが示す車両の方位、GPSレシーバで出力されたデータが示す車両の位置やウインカレバーで出力された車両の右左折方向などがある。また、「道路の状況」としては、地図データが示す交差点の形状や交通規制などがある。また、「前記撮影画像と前記他の画像との相対透過率」とは、撮影画像および他の画像がそれぞれ正面および背面の関係にあれば、他の画像を撮影画像に優先して表示させる度合いをいい、撮影画像および他の画像がそれぞれ背面および正面の関係にあれば、撮影画像を他の画像に優先して表示させる度合いをいう。
【0008】
また、本発明の表示制御装置の前記制御手段は、記憶媒体上のデータが示す車両の状況に応じて前記撮影画像と前記他の画像との相対透過率を連続的に変化させる構成を有している。
【0009】
この構成により、本発明の表示制御装置は、記憶媒体上のデータが示す車両の状況と、表示装置の表示の変化との違和感を低減することができる。
【0010】
また、本発明の表示制御装置の前記制御手段は、前記車両の経路の映像を前記他の画像として前記表示装置に表示させ、前記経路の映像中の方位と、前記表示装置の表示画面上の方向との対応関係が固定であるときに、前記表示画面上における前記表示領域の位置を前記経路の映像中の前記車両の進行方向の変化に応じて変化させる構成を有している。
【0011】
この構成により、本発明の表示制御装置は、車両の経路の映像中の車両の進行方向と、複数の撮影装置のそれぞれによって撮られた撮影画像が表示される表示領域との表示画面上における位置関係の違和感を低減することができる。
【0012】
また、本発明の表示制御装置の前記制御手段は、前記車両の周辺の地図情報と、前記車両の位置と、前記車両の進行方向とに応じて前記表示装置の表示画面上における複数の前記表示領域同士の比率を設定する構成を有している。
【0013】
この構成により、本発明の表示制御装置は、表示装置による撮影画像の表示に減り張りを出すことができる。
【発明の効果】
【0014】
本発明は、車両の周辺の映像以外の映像と、車両の周辺の映像とを表示装置に同時に表示させることができる表示制御装置を提供することができるものである。
【発明を実施するための最良の形態】
【0015】
以下、本発明の一実施の形態について、図面を用いて説明する。
【0016】
まず、本実施の形態に係る運転支援システムの構成について説明する。
【0017】
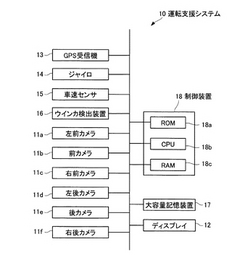
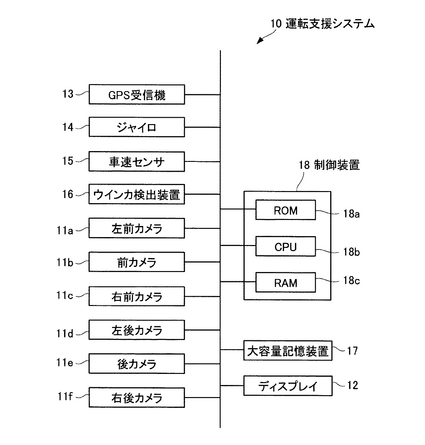
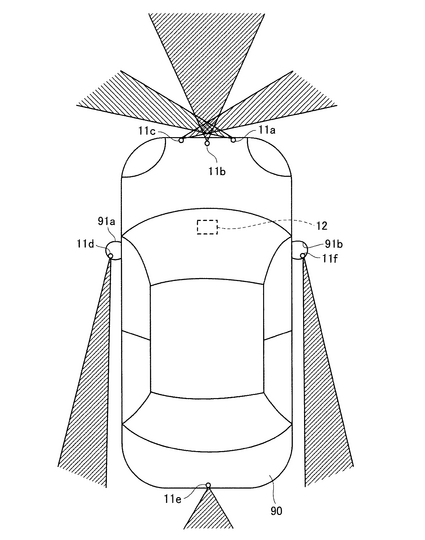
図1及び図2に示すように、本実施の形態に係る運転支援システム10は、車両90の右側前方に搭載されて車両90の左側前方の映像を撮る撮影装置としての左前カメラ11aと、車両90の前方に搭載されて車両90の前方の映像を撮る撮影装置としての前カメラ11bと、車両90の左側前方に搭載されて車両90の右側前方の映像を撮る撮影装置としての右前カメラ11cと、車両90の左側のサイドミラー91a内に搭載されて車両90の左側後方の映像を撮る撮影装置としての左後カメラ11dと、車両90の後方に搭載されて車両90の後方の映像を撮る撮影装置としての後カメラ11eと、車両90の右側のサイドミラー91b内に搭載されて車両90の右側後方の映像を撮る撮影装置としての右後カメラ11fと、車両90の内部の図示していないインストルメンタルパネルに搭載されて映像を表示する表示装置としてのディスプレイ12と、車両90に搭載されて緯度及び経度による現在位置を受信するGPS(Global Positioning System)受信機13と、車両90に搭載されて車両90の向きを検出するジャイロ14と、車両90に搭載されて車両90の速度を検出する車速センサ15と、車両90の図示していないウインカの操作状態を検出するウインカ状態検出装置16と、車両90に搭載されて地図情報や各種判定テーブル(図3及び図4参照。)を記憶した例えばHDD(Hard Disk Drive)等の大容量記憶装置17と、車両90に搭載されて運転支援システム10全体の制御を行う制御装置18とを備えている。
【0018】
また、制御装置18は、各種制御プログラムを記憶したROM(Read Only Memory)18aと、ROM18aによって記憶された各種制御プログラムを実行することによって各種機能を実現するCPU(Central Processing Unit)18bと、CPU18bによる各種処理結果を記憶するRAM(Random Access Memory)18cとを有している。なお、制御装置18は、ディスプレイ12の表示を制御するようになっており、表示制御装置を構成している。
【0019】
次に、運転支援システム10の動作について説明する。
【0020】
図5に示すように、CPU18bは、GPS受信機13によって受信した現在位置をRAM18cに記憶し(S31)、ウインカ状態検出装置16によって検出した車両90のウインカの操作状態をRAM18cに記憶する(S32)。
【0021】
次いで、CPU18bは、大容量記憶装置17に記憶された地図情報と、S31においてRAM18cに記憶した現在位置とに基づいて、車両90の周辺の地図情報を取得し、取得した車両90の周辺の地図情報をRAM18cに記憶する(S33)。
【0022】
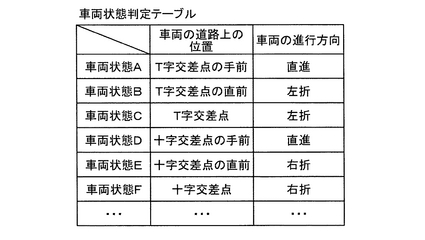
次いで、CPU18bは、S31においてRAM18cに記憶した現在位置と、S33においてRAM18cに記憶した車両90の周辺の地図情報とに基づいて、車両90が道路上の何れの位置に存在しているかを判定し、S32においてRAM18cに記憶したウインカの操作状態に基づいて、車両90が何れの方向に進行しているかを判定し、判定した車両90の道路上の位置及び進行方向と、大容量記憶装置17に記憶された図3に示す車両状態判定テーブルとに基づいて、車両状態を判定する(S34)。
【0023】
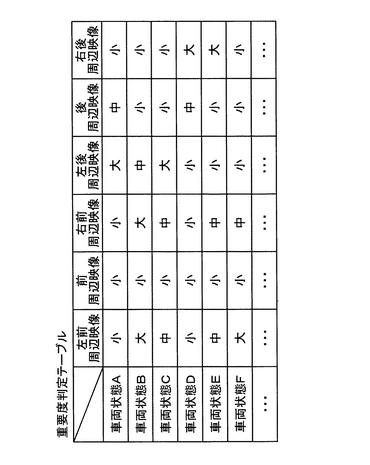
CPU18bは、S34において車両状態を判定すると、S34において判定した車両状態と、大容量記憶装置17に記憶された図4に示す重要度判定テーブルとに基づいて、左前カメラ11aによって撮られた車両90の周辺の映像である撮影画像としての左前周辺映像40a(図6参照。)、前カメラ11bによって撮られた車両90の周辺の映像である撮影画像としての前周辺映像40b(図6参照。)、右前カメラ11cによって撮られた車両90の周辺の映像である撮影画像としての右前周辺映像40c(図6参照。)、左後カメラ11dによって撮られた車両90の周辺の映像である撮影画像としての左後周辺映像40d(図6参照。)、後カメラ11eによって撮られた車両90の周辺の映像である撮影画像としての後周辺映像40e(図6参照。)、右後カメラ11fによって撮られた車両90の周辺の映像である撮影画像としての右後周辺映像40f(図6参照。)のそれぞれの重要度を判定する(S35)。
【0024】
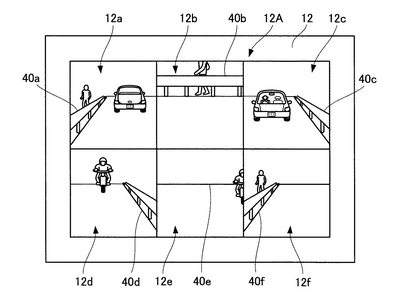
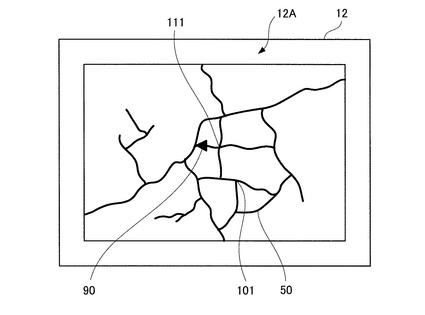
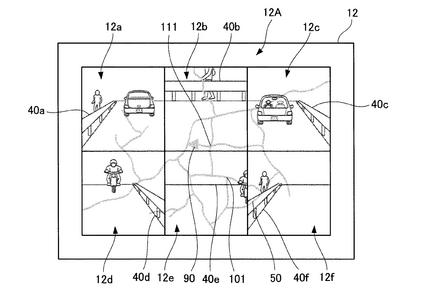
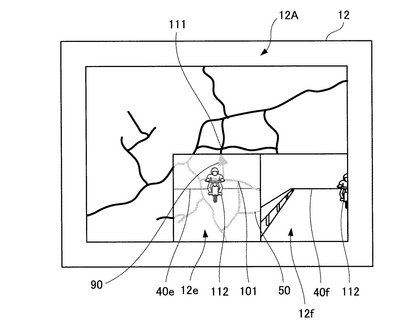
そして、CPU18bは、周辺映像40a〜40fと、別途生成していた車両90の経路の映像(以下「経路映像」という。)50(図7参照。)とを図8に示すようにディスプレイ12の表示画面12Aに表示させる(S36)。
【0025】
ここで、CPU18bは、S36において、図8に示すように、周辺映像40a〜40fをそれぞれディスプレイ12の表示画面12A上の表示領域12a〜12fに表示させる。
【0026】
また、CPU18bは、S36において、図8に示すように、周辺映像40a〜40f以外の映像である他の画像としての経路映像50に対して、周辺映像40a〜40fを透過させてディスプレイ12の表示画面12A上に表示させる。なお、CPU18bは、経路映像50に対する周辺映像40a〜40fそれぞれの透過率を、S35において判定した重要度が“小”であるときには0%(周辺映像40a〜40fおよび経路映像50がそれぞれ背面および正面の関係にあり、周辺映像40a〜40fを経路映像50に完全に隠す状態)に設定し、S35において判定した重要度が“中”であるときには50%に設定し、S35において判定した重要度が“大”であるときには100%(周辺映像40a〜40fおよび経路映像50がそれぞれ正面および背面の関係にあり、経路映像50を周辺映像40a〜40fに完全に隠す状態)に設定する。このように、ROM18a、CPU18b及びRAM18cは、車両90の周辺の地図情報と、車両90の位置と、車両90の進行方向とに応じて、経路映像50に対する周辺映像40a〜40fそれぞれの透過率を設定する制御手段を構成している。
【0027】
なお、CPU18bは、S36において映像をディスプレイ12の表示画面12Aに表示させると、図5に示す一連の処理を一旦終了し、図5に示す一連の処理を再び開始する。
【0028】
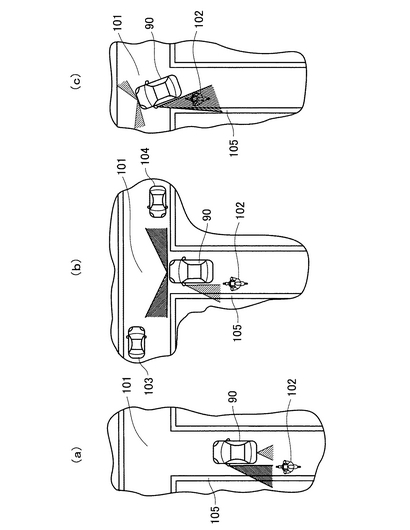
運転支援システム10は、以上のように動作するので、例えば車両90が図9(a)から図9(c)までに示すようにT字交差点101を左折する場合、以下のように動作する。
【0029】
車両90が図9(a)に示すようにT字交差点101の手前でT字交差点101に向かって直進しているとき、CPU18bは、S34において車両状態Aと判定し、S35において判定した重要度に応じてS36において図10に示す映像をディスプレイ12に表示させる。したがって、運転者は、透過率が100%の左後周辺映像40dと、透過率が50%の後周辺映像40eとによって、例えば車両90の後方をT字交差点101に向かって直進している二輪車102等を、車両90によって左折時に巻き込まないように十分に注意することができる。
【0030】
次いで、車両90が図9(b)に示すようにT字交差点101の直前で左折しているとき、CPU18bは、S34において車両状態Bと判定し、S35において判定した重要度に応じてS36において図11に示す映像をディスプレイ12に表示させる。したがって、運転者は、透過率が100%の左前周辺映像40aと、透過率が100%の右前周辺映像40cとによって、例えば車両90の左側前方からT字交差点101に向かって直進している車両103や車両90の右側前方からT字交差点101に向かって直進している車両104等に、車両90を衝突させないように十分に注意することができる。また、運転者は、透過率が50%の左後周辺映像40dによって、例えば車両90の左側後方をT字交差点101に向かって直進している二輪車102等を、車両90によって左折時に巻き込まないように注意することもできる。
【0031】
次いで、車両90が図9(c)に示すようにT字交差点101で左折しているとき、CPU18bは、S34において車両状態Cと判定し、S35において判定した重要度に応じてS36において図12に示す映像をディスプレイ12に表示させる。したがって、運転者は、透過率が100%の左後周辺映像40dによって、例えば車両90の左側後方のガードレール105等に、車両90が接触しないように十分に注意することができる。また、運転者は、透過率が50%の左前周辺映像40aと、透過率が50%の右前周辺映像40cとによって、例えば車両90の左側前方や右側前方から車両90に向かって近付いてくる図示していない車両等に、車両90を衝突させないように注意することもできる。
【0032】
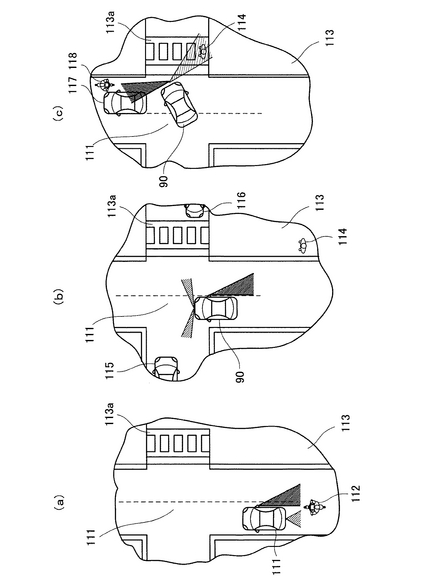
また、運転支援システム10は、例えば車両90が図13(a)から図13(c)までに示すように十字交差点111を右折する場合、以下のように動作する。
【0033】
車両90が図13(a)に示すように十字交差点111の手前で十字交差点111に向かって直進しているとき、CPU18bは、S34において車両状態Dと判定し、S35において判定した重要度に応じてS36において図14に示す映像をディスプレイ12に表示させる。したがって、運転者は、透過率が50%の後周辺映像40eと、透過率が100%の右後周辺映像40fとによって、例えば車両90の後方を十字交差点111に向かって直進している二輪車112等を、車両90によって右折時に巻き込まないように十分に注意することができる。
【0034】
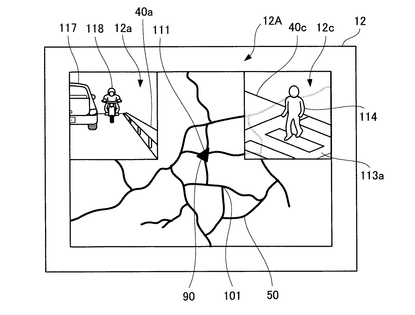
次いで、車両90が図13(b)に示すように十字交差点111の直前で右折しているとき、CPU18bは、S34において車両状態Eと判定し、S35において判定した重要度に応じてS36において図15に示す映像をディスプレイ12に表示させる。したがって、運転者は、透過率が100%の右後周辺映像40fによって、例えば車両90の右側後方の歩道113を横断歩道113aに向かって直進している人114等を、車両90によって右折時に巻き込まないように十分に注意することができる。また、運転者は、透過率が50%の左前周辺映像40aと、透過率が50%の右前周辺映像40cとによって、例えば車両90の左側前方から十字交差点111に向かって直進している車両115や車両90の右側前方から十字交差点111に向かって直進している車両116等に、車両90を衝突させないように注意することもできる。
【0035】
次いで、車両90が図13(c)に示すように十字交差点111で右折しているとき、CPU18bは、S34において車両状態Fと判定し、S35において判定した重要度に応じてS36において図16に示す映像をディスプレイ12に表示させる。したがって、運転者は、透過率が100%の左前周辺映像40aによって、例えば車両90の対向車両117の陰から十字交差点111に向かって直進している二輪車118等に、車両90を衝突させないように十分に注意することができる。また、運転者は、透過率が50%の右前周辺映像40cによって、例えば車両90の右側前方の横断歩道113aを横断中の人114等を、車両90によって巻き込まないように注意することもできる。
【0036】
以上に説明したように、制御装置18は、経路映像50に対して周辺映像40a〜40fをディスプレイ12の表示画面12A上で透過させるので、経路映像50と周辺映像40a〜40fとをディスプレイ12に同時に表示させることができる。
【0037】
また、制御装置18は、経路映像50に対する周辺映像40a〜40fそれぞれの透過率を車両90の運転者による車両90のウインカの操作に応じて設定するので、車両90の運転者の意思に合わせてディスプレイ12の表示を変更することができる。なお、制御装置18は、車両90のウインカの操作状態に基づいて車両90の進行方向を判断するようになっているが、他の方法によって車両90の進行方向を判断するようになっていても良い。例えば、制御装置18は、自ら生成した車両90のナビゲーション用の予定経路と、GPS受信機13によって受信した現在位置とに基づいて、車両90の進行方向を判断するようになっていても良いし、ジャイロ14によって検出された車両90の向きや車速センサ15によって検出された車両90の速度等に基づいて、車両90の進行方向を判断するようになっていても良い。
【0038】
また、CPU18bは、経路映像50に対する周辺映像40a〜40fそれぞれの透過率を0%、50%、100%というように車両90の位置又は進行方向の変化に応じて不連続に変化させているが、経路映像50に対する周辺映像40a〜40fそれぞれの透過率を車両90の位置又は進行方向の変化に応じてより細かく連続的に変化させるようにすれば、車両90の位置又は進行方向の変化と、ディスプレイ12の表示の変化との違和感を低減することができる。
【0039】
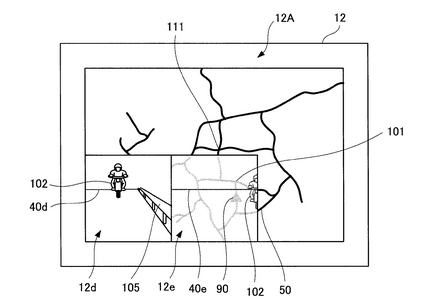
また、CPU18bは、ディスプレイ12の表示画面12A上における表示領域12a〜12fの位置を固定しているので、表示画面12A上における何れの位置に何れの方向の周辺映像が表示されているかについて車両90の運転者が混乱することを防止することができるが、表示画面12A上における表示領域12a〜12fの位置を変化させるようになっていても良い。例えば、CPU18bは、経路映像50中の方位と、ディスプレイ12の表示画面12A上の方向との対応関係を図10〜図12や図14〜図16に示すように車両90の進行方向に関わらず固定(例えば所謂「ノースアップ」)するようになっているときに、表示画面12A上における表示領域12a〜12fの位置を図17に示すように経路映像50中の車両90の進行方向の変化に応じて変化させるようになっていれば、経路映像50中の車両90の進行方向と、表示領域12a〜12fとの表示画面12A上における位置関係に対する違和感を低減することができる。なお、CPU18bは、経路映像50中の方位と、ディスプレイ12の表示画面12A上の方向との対応関係を固定するのではなく、車両90の進行方向と、ディスプレイ12の表示画面12A上の方向との対応関係を固定(例えば所謂「ヘディングアップ」)するようになっていても良い。
【0040】
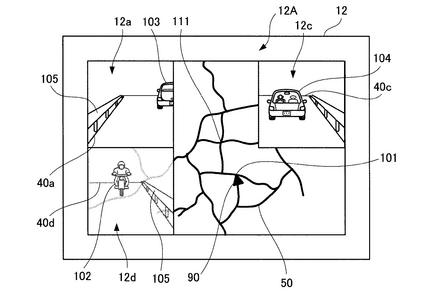
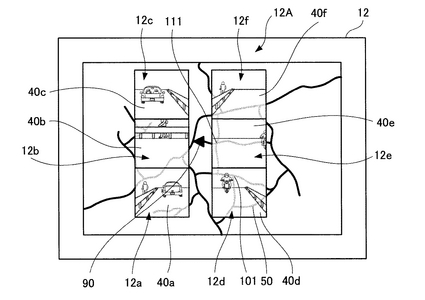
また、CPU18bは、ディスプレイ12の表示画面12A上における表示領域12a〜12f同士の比率を固定しているが、表示領域12a〜12f同士の比率を変更するようになっていても良い。例えば、CPU18bは、車両90の周辺の地図情報と、車両90の位置及び進行方向とに応じて図18に示すように表示領域12a〜12f同士の比率を設定するようになっていれば、ディスプレイ12による周辺映像40a〜40fの表示に減り張りを出すことができる。
【0041】
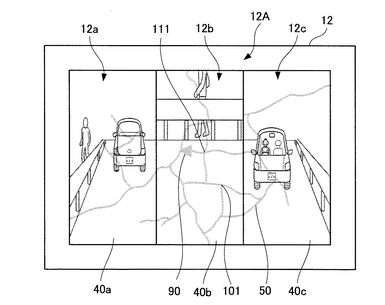
また、CPU18bは、周辺映像40a〜40fという6つの周辺映像をディスプレイ12に表示させるようになっているが、6つ以外の数の周辺映像をディスプレイ12に表示させるようになっていても良い。例えば、CPU18bは、図19に示すように、左前周辺映像40a、前周辺映像40b及び右前周辺映像40cという3つの周辺映像をディスプレイ12に表示させるようになっていても良い。
【0042】
また、CPU18bは、周辺映像40a〜40fを透過させる他の画像として経路映像50をディスプレイ12に表示させるようになっているが、周辺映像40a〜40fを透過させる他の画像として経路映像50以外の映像をディスプレイ12に表示させるようになっていても良い。
【0043】
なお、制御装置18は、ROM18aによって記憶された各種制御プログラムによって各種機能を実現するようになっているが、ソフトウェアを使用せずにハードウェアのみによって各種機能を実現するようになっていても良い。
【産業上の利用可能性】
【0044】
以上のように、本発明に係る表示制御装置は、車両の周辺の映像以外の映像と、車両の周辺の映像とを表示装置に同時に表示させることができるという効果を有し、ナビゲーション用の映像と、車両の周辺の映像とを表示装置に同時に表示させる表示制御装置等として有用である。
【図面の簡単な説明】
【0045】
【図1】本発明の一実施の形態に係る運転支援システムのハードウェアブロック図
【図2】図1に示す運転支援システムが搭載された車両の上面図
【図3】図1に示す運転支援システムの大容量記憶装置に記憶された車両状態判定テーブルを示す図
【図4】図1に示す運転支援システムの大容量記憶装置に記憶された重要度判定テーブルを示す図
【図5】図1に示す運転支援システムの動作のフローチャート
【図6】図1に示す運転支援システムのディスプレイが周辺映像を表示しているときのディスプレイの正面図
【図7】図6に示すディスプレイが経路映像を表示しているときのディスプレイの正面図
【図8】図6に示すディスプレイが周辺映像及び経路映像を同時に表示しているときのディスプレイの正面図
【図9】(a)図2に示す車両がT字交差点の手前でT字交差点に向かって直進しているときの車両の周辺の上面図 (b)図2に示す車両がT字交差点の直前で左折しているときの車両の周辺の上面図 (c)図2に示す車両がT字交差点で左折しているときの車両の周辺の上面図
【図10】図2に示す車両が図9(a)に示す状態であるときの図6に示すディスプレイの正面図
【図11】図2に示す車両が図9(b)に示す状態であるときの図6に示すディスプレイの正面図
【図12】図2に示す車両が図9(c)に示す状態であるときの図6に示すディスプレイの正面図
【図13】(a)図2に示す車両が十字交差点の手前で十字交差点に向かって直進しているときの車両の周辺の上面図 (b)図2に示す車両が十字交差点の直前で右折しているときの車両の周辺の上面図 (c)図2に示す車両が十字交差点で右折しているときの車両の周辺の上面図
【図14】図2に示す車両が図13(a)に示す状態であるときの図6に示すディスプレイの正面図
【図15】図2に示す車両が図13(b)に示す状態であるときの図6に示すディスプレイの正面図
【図16】図2に示す車両が図13(c)に示す状態であるときの図6に示すディスプレイの正面図
【図17】表示画面上における周辺映像の表示領域の位置が変化するときの図6に示すディスプレイの正面図
【図18】表示画面上における周辺映像の表示領域同士の比率が変化するときの図6に示すディスプレイの正面図
【図19】表示画面上における周辺映像の表示領域が3つであるときの図6に示すディスプレイの正面図
【符号の説明】
【0046】
11a 左前カメラ(撮影装置)
11b 前カメラ(撮影装置)
11c 右前カメラ(撮影装置)
11d 左後カメラ(撮影装置)
11e 後カメラ(撮影装置)
11f 右後カメラ(撮影装置)
12 ディスプレイ(表示装置)
12A 表示画面
12a〜12f 表示領域
18 制御装置(表示制御装置)
18a ROM(制御手段)
18b CPU(制御手段)
18c RAM(制御手段)
40a 左前周辺映像(撮影画像)
40b 前周辺映像(撮影画像)
40c 右前周辺映像(撮影画像)
40d 左後周辺映像(撮影画像)
40e 後周辺映像(撮影画像)
40f 右後周辺映像(撮影画像)
50 経路映像(他の画像)
90 車両
【技術分野】
【0001】
本発明は、表示装置の表示を制御する表示制御装置に関するものである。
【背景技術】
【0002】
従来の表示制御装置としては、自車両の左側方の画像と、自車両の右側方の画像との表示画面上での比率を、交差点における移動体の有無によって変えるものが知られている(例えば、特許文献1参照。)。
【0003】
【特許文献1】特開2002−225628号公報(第5−7頁、第5−12図)
【発明の開示】
【発明が解決しようとする課題】
【0004】
しかしながら、従来の表示制御装置においては、自車両の左側方の画像と、自車両の右側方の画像とを表示画面全体に表示するので、自車両の左側方の画像及び自車両の右側方の画像を表示画面に表示しているときには、自車両の左側方の画像及び自車両の右側方の画像以外の画像を表示画面に表示することができないという問題があった。
【0005】
本発明は、従来の問題を解決するためになされたもので、車両の周辺の映像以外の映像と、車両の周辺の映像とを表示装置に同時に表示させることができる表示制御装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
本発明の表示制御装置は、各撮影装置で得られた撮影画像と他の画像とを表示装置の表示領域に重畳表示させ、各撮影装置で得られた撮影画像をそれぞれ異なる表示領域で表示させる表示制御装置であって、記憶媒体上のデータが示す車両の状況および道路の状況に応じて前記撮影画像と前記他の画像との相対透過率を前記表示領域ごとに異ならせて表示させる制御手段を備えた構成を有している。
【0007】
この構成により、本発明の表示制御装置は、他の画像に対して撮影画像を表示装置の表示画面上で透過させるので、他の画像と撮影画像とを表示装置に同時に表示させることができる。ここで、「重畳表示させ」とは、一の画像および他の画像をそれぞれ正面および背面に表示させることをいう。また、「各撮影装置で得られた撮影画像をそれぞれ異なる表示領域で表示させる」とは、表示領域を複数に区分してなる区分領域を定義し、一の撮影装置で得られた撮影画像および他の撮影装置で得られた撮影画像をそれぞれ一の区分領域および他の区分領域に表示させることをいう。また、「記憶媒体上のデータが示す車両の状況および道路の状況」とは、記憶媒体上のデータが示す車両の状況および記憶媒体上のデータが示す道路の状況をいう。また、「記憶媒体」とは、データを記憶する装置であって、ROM、RAMやHDDなどをいう。また、「記憶媒体上のデータが示す」とは、各種デバイス等で出力された記憶媒体上に保持されたデータまたは予め記憶媒体上に記憶されたデータをいう。また、「車両の状況」としては、速度センサで出力されたデータが示す車両の速度、方位センサで出力されたデータが示す車両の方位、GPSレシーバで出力されたデータが示す車両の位置やウインカレバーで出力された車両の右左折方向などがある。また、「道路の状況」としては、地図データが示す交差点の形状や交通規制などがある。また、「前記撮影画像と前記他の画像との相対透過率」とは、撮影画像および他の画像がそれぞれ正面および背面の関係にあれば、他の画像を撮影画像に優先して表示させる度合いをいい、撮影画像および他の画像がそれぞれ背面および正面の関係にあれば、撮影画像を他の画像に優先して表示させる度合いをいう。
【0008】
また、本発明の表示制御装置の前記制御手段は、記憶媒体上のデータが示す車両の状況に応じて前記撮影画像と前記他の画像との相対透過率を連続的に変化させる構成を有している。
【0009】
この構成により、本発明の表示制御装置は、記憶媒体上のデータが示す車両の状況と、表示装置の表示の変化との違和感を低減することができる。
【0010】
また、本発明の表示制御装置の前記制御手段は、前記車両の経路の映像を前記他の画像として前記表示装置に表示させ、前記経路の映像中の方位と、前記表示装置の表示画面上の方向との対応関係が固定であるときに、前記表示画面上における前記表示領域の位置を前記経路の映像中の前記車両の進行方向の変化に応じて変化させる構成を有している。
【0011】
この構成により、本発明の表示制御装置は、車両の経路の映像中の車両の進行方向と、複数の撮影装置のそれぞれによって撮られた撮影画像が表示される表示領域との表示画面上における位置関係の違和感を低減することができる。
【0012】
また、本発明の表示制御装置の前記制御手段は、前記車両の周辺の地図情報と、前記車両の位置と、前記車両の進行方向とに応じて前記表示装置の表示画面上における複数の前記表示領域同士の比率を設定する構成を有している。
【0013】
この構成により、本発明の表示制御装置は、表示装置による撮影画像の表示に減り張りを出すことができる。
【発明の効果】
【0014】
本発明は、車両の周辺の映像以外の映像と、車両の周辺の映像とを表示装置に同時に表示させることができる表示制御装置を提供することができるものである。
【発明を実施するための最良の形態】
【0015】
以下、本発明の一実施の形態について、図面を用いて説明する。
【0016】
まず、本実施の形態に係る運転支援システムの構成について説明する。
【0017】
図1及び図2に示すように、本実施の形態に係る運転支援システム10は、車両90の右側前方に搭載されて車両90の左側前方の映像を撮る撮影装置としての左前カメラ11aと、車両90の前方に搭載されて車両90の前方の映像を撮る撮影装置としての前カメラ11bと、車両90の左側前方に搭載されて車両90の右側前方の映像を撮る撮影装置としての右前カメラ11cと、車両90の左側のサイドミラー91a内に搭載されて車両90の左側後方の映像を撮る撮影装置としての左後カメラ11dと、車両90の後方に搭載されて車両90の後方の映像を撮る撮影装置としての後カメラ11eと、車両90の右側のサイドミラー91b内に搭載されて車両90の右側後方の映像を撮る撮影装置としての右後カメラ11fと、車両90の内部の図示していないインストルメンタルパネルに搭載されて映像を表示する表示装置としてのディスプレイ12と、車両90に搭載されて緯度及び経度による現在位置を受信するGPS(Global Positioning System)受信機13と、車両90に搭載されて車両90の向きを検出するジャイロ14と、車両90に搭載されて車両90の速度を検出する車速センサ15と、車両90の図示していないウインカの操作状態を検出するウインカ状態検出装置16と、車両90に搭載されて地図情報や各種判定テーブル(図3及び図4参照。)を記憶した例えばHDD(Hard Disk Drive)等の大容量記憶装置17と、車両90に搭載されて運転支援システム10全体の制御を行う制御装置18とを備えている。
【0018】
また、制御装置18は、各種制御プログラムを記憶したROM(Read Only Memory)18aと、ROM18aによって記憶された各種制御プログラムを実行することによって各種機能を実現するCPU(Central Processing Unit)18bと、CPU18bによる各種処理結果を記憶するRAM(Random Access Memory)18cとを有している。なお、制御装置18は、ディスプレイ12の表示を制御するようになっており、表示制御装置を構成している。
【0019】
次に、運転支援システム10の動作について説明する。
【0020】
図5に示すように、CPU18bは、GPS受信機13によって受信した現在位置をRAM18cに記憶し(S31)、ウインカ状態検出装置16によって検出した車両90のウインカの操作状態をRAM18cに記憶する(S32)。
【0021】
次いで、CPU18bは、大容量記憶装置17に記憶された地図情報と、S31においてRAM18cに記憶した現在位置とに基づいて、車両90の周辺の地図情報を取得し、取得した車両90の周辺の地図情報をRAM18cに記憶する(S33)。
【0022】
次いで、CPU18bは、S31においてRAM18cに記憶した現在位置と、S33においてRAM18cに記憶した車両90の周辺の地図情報とに基づいて、車両90が道路上の何れの位置に存在しているかを判定し、S32においてRAM18cに記憶したウインカの操作状態に基づいて、車両90が何れの方向に進行しているかを判定し、判定した車両90の道路上の位置及び進行方向と、大容量記憶装置17に記憶された図3に示す車両状態判定テーブルとに基づいて、車両状態を判定する(S34)。
【0023】
CPU18bは、S34において車両状態を判定すると、S34において判定した車両状態と、大容量記憶装置17に記憶された図4に示す重要度判定テーブルとに基づいて、左前カメラ11aによって撮られた車両90の周辺の映像である撮影画像としての左前周辺映像40a(図6参照。)、前カメラ11bによって撮られた車両90の周辺の映像である撮影画像としての前周辺映像40b(図6参照。)、右前カメラ11cによって撮られた車両90の周辺の映像である撮影画像としての右前周辺映像40c(図6参照。)、左後カメラ11dによって撮られた車両90の周辺の映像である撮影画像としての左後周辺映像40d(図6参照。)、後カメラ11eによって撮られた車両90の周辺の映像である撮影画像としての後周辺映像40e(図6参照。)、右後カメラ11fによって撮られた車両90の周辺の映像である撮影画像としての右後周辺映像40f(図6参照。)のそれぞれの重要度を判定する(S35)。
【0024】
そして、CPU18bは、周辺映像40a〜40fと、別途生成していた車両90の経路の映像(以下「経路映像」という。)50(図7参照。)とを図8に示すようにディスプレイ12の表示画面12Aに表示させる(S36)。
【0025】
ここで、CPU18bは、S36において、図8に示すように、周辺映像40a〜40fをそれぞれディスプレイ12の表示画面12A上の表示領域12a〜12fに表示させる。
【0026】
また、CPU18bは、S36において、図8に示すように、周辺映像40a〜40f以外の映像である他の画像としての経路映像50に対して、周辺映像40a〜40fを透過させてディスプレイ12の表示画面12A上に表示させる。なお、CPU18bは、経路映像50に対する周辺映像40a〜40fそれぞれの透過率を、S35において判定した重要度が“小”であるときには0%(周辺映像40a〜40fおよび経路映像50がそれぞれ背面および正面の関係にあり、周辺映像40a〜40fを経路映像50に完全に隠す状態)に設定し、S35において判定した重要度が“中”であるときには50%に設定し、S35において判定した重要度が“大”であるときには100%(周辺映像40a〜40fおよび経路映像50がそれぞれ正面および背面の関係にあり、経路映像50を周辺映像40a〜40fに完全に隠す状態)に設定する。このように、ROM18a、CPU18b及びRAM18cは、車両90の周辺の地図情報と、車両90の位置と、車両90の進行方向とに応じて、経路映像50に対する周辺映像40a〜40fそれぞれの透過率を設定する制御手段を構成している。
【0027】
なお、CPU18bは、S36において映像をディスプレイ12の表示画面12Aに表示させると、図5に示す一連の処理を一旦終了し、図5に示す一連の処理を再び開始する。
【0028】
運転支援システム10は、以上のように動作するので、例えば車両90が図9(a)から図9(c)までに示すようにT字交差点101を左折する場合、以下のように動作する。
【0029】
車両90が図9(a)に示すようにT字交差点101の手前でT字交差点101に向かって直進しているとき、CPU18bは、S34において車両状態Aと判定し、S35において判定した重要度に応じてS36において図10に示す映像をディスプレイ12に表示させる。したがって、運転者は、透過率が100%の左後周辺映像40dと、透過率が50%の後周辺映像40eとによって、例えば車両90の後方をT字交差点101に向かって直進している二輪車102等を、車両90によって左折時に巻き込まないように十分に注意することができる。
【0030】
次いで、車両90が図9(b)に示すようにT字交差点101の直前で左折しているとき、CPU18bは、S34において車両状態Bと判定し、S35において判定した重要度に応じてS36において図11に示す映像をディスプレイ12に表示させる。したがって、運転者は、透過率が100%の左前周辺映像40aと、透過率が100%の右前周辺映像40cとによって、例えば車両90の左側前方からT字交差点101に向かって直進している車両103や車両90の右側前方からT字交差点101に向かって直進している車両104等に、車両90を衝突させないように十分に注意することができる。また、運転者は、透過率が50%の左後周辺映像40dによって、例えば車両90の左側後方をT字交差点101に向かって直進している二輪車102等を、車両90によって左折時に巻き込まないように注意することもできる。
【0031】
次いで、車両90が図9(c)に示すようにT字交差点101で左折しているとき、CPU18bは、S34において車両状態Cと判定し、S35において判定した重要度に応じてS36において図12に示す映像をディスプレイ12に表示させる。したがって、運転者は、透過率が100%の左後周辺映像40dによって、例えば車両90の左側後方のガードレール105等に、車両90が接触しないように十分に注意することができる。また、運転者は、透過率が50%の左前周辺映像40aと、透過率が50%の右前周辺映像40cとによって、例えば車両90の左側前方や右側前方から車両90に向かって近付いてくる図示していない車両等に、車両90を衝突させないように注意することもできる。
【0032】
また、運転支援システム10は、例えば車両90が図13(a)から図13(c)までに示すように十字交差点111を右折する場合、以下のように動作する。
【0033】
車両90が図13(a)に示すように十字交差点111の手前で十字交差点111に向かって直進しているとき、CPU18bは、S34において車両状態Dと判定し、S35において判定した重要度に応じてS36において図14に示す映像をディスプレイ12に表示させる。したがって、運転者は、透過率が50%の後周辺映像40eと、透過率が100%の右後周辺映像40fとによって、例えば車両90の後方を十字交差点111に向かって直進している二輪車112等を、車両90によって右折時に巻き込まないように十分に注意することができる。
【0034】
次いで、車両90が図13(b)に示すように十字交差点111の直前で右折しているとき、CPU18bは、S34において車両状態Eと判定し、S35において判定した重要度に応じてS36において図15に示す映像をディスプレイ12に表示させる。したがって、運転者は、透過率が100%の右後周辺映像40fによって、例えば車両90の右側後方の歩道113を横断歩道113aに向かって直進している人114等を、車両90によって右折時に巻き込まないように十分に注意することができる。また、運転者は、透過率が50%の左前周辺映像40aと、透過率が50%の右前周辺映像40cとによって、例えば車両90の左側前方から十字交差点111に向かって直進している車両115や車両90の右側前方から十字交差点111に向かって直進している車両116等に、車両90を衝突させないように注意することもできる。
【0035】
次いで、車両90が図13(c)に示すように十字交差点111で右折しているとき、CPU18bは、S34において車両状態Fと判定し、S35において判定した重要度に応じてS36において図16に示す映像をディスプレイ12に表示させる。したがって、運転者は、透過率が100%の左前周辺映像40aによって、例えば車両90の対向車両117の陰から十字交差点111に向かって直進している二輪車118等に、車両90を衝突させないように十分に注意することができる。また、運転者は、透過率が50%の右前周辺映像40cによって、例えば車両90の右側前方の横断歩道113aを横断中の人114等を、車両90によって巻き込まないように注意することもできる。
【0036】
以上に説明したように、制御装置18は、経路映像50に対して周辺映像40a〜40fをディスプレイ12の表示画面12A上で透過させるので、経路映像50と周辺映像40a〜40fとをディスプレイ12に同時に表示させることができる。
【0037】
また、制御装置18は、経路映像50に対する周辺映像40a〜40fそれぞれの透過率を車両90の運転者による車両90のウインカの操作に応じて設定するので、車両90の運転者の意思に合わせてディスプレイ12の表示を変更することができる。なお、制御装置18は、車両90のウインカの操作状態に基づいて車両90の進行方向を判断するようになっているが、他の方法によって車両90の進行方向を判断するようになっていても良い。例えば、制御装置18は、自ら生成した車両90のナビゲーション用の予定経路と、GPS受信機13によって受信した現在位置とに基づいて、車両90の進行方向を判断するようになっていても良いし、ジャイロ14によって検出された車両90の向きや車速センサ15によって検出された車両90の速度等に基づいて、車両90の進行方向を判断するようになっていても良い。
【0038】
また、CPU18bは、経路映像50に対する周辺映像40a〜40fそれぞれの透過率を0%、50%、100%というように車両90の位置又は進行方向の変化に応じて不連続に変化させているが、経路映像50に対する周辺映像40a〜40fそれぞれの透過率を車両90の位置又は進行方向の変化に応じてより細かく連続的に変化させるようにすれば、車両90の位置又は進行方向の変化と、ディスプレイ12の表示の変化との違和感を低減することができる。
【0039】
また、CPU18bは、ディスプレイ12の表示画面12A上における表示領域12a〜12fの位置を固定しているので、表示画面12A上における何れの位置に何れの方向の周辺映像が表示されているかについて車両90の運転者が混乱することを防止することができるが、表示画面12A上における表示領域12a〜12fの位置を変化させるようになっていても良い。例えば、CPU18bは、経路映像50中の方位と、ディスプレイ12の表示画面12A上の方向との対応関係を図10〜図12や図14〜図16に示すように車両90の進行方向に関わらず固定(例えば所謂「ノースアップ」)するようになっているときに、表示画面12A上における表示領域12a〜12fの位置を図17に示すように経路映像50中の車両90の進行方向の変化に応じて変化させるようになっていれば、経路映像50中の車両90の進行方向と、表示領域12a〜12fとの表示画面12A上における位置関係に対する違和感を低減することができる。なお、CPU18bは、経路映像50中の方位と、ディスプレイ12の表示画面12A上の方向との対応関係を固定するのではなく、車両90の進行方向と、ディスプレイ12の表示画面12A上の方向との対応関係を固定(例えば所謂「ヘディングアップ」)するようになっていても良い。
【0040】
また、CPU18bは、ディスプレイ12の表示画面12A上における表示領域12a〜12f同士の比率を固定しているが、表示領域12a〜12f同士の比率を変更するようになっていても良い。例えば、CPU18bは、車両90の周辺の地図情報と、車両90の位置及び進行方向とに応じて図18に示すように表示領域12a〜12f同士の比率を設定するようになっていれば、ディスプレイ12による周辺映像40a〜40fの表示に減り張りを出すことができる。
【0041】
また、CPU18bは、周辺映像40a〜40fという6つの周辺映像をディスプレイ12に表示させるようになっているが、6つ以外の数の周辺映像をディスプレイ12に表示させるようになっていても良い。例えば、CPU18bは、図19に示すように、左前周辺映像40a、前周辺映像40b及び右前周辺映像40cという3つの周辺映像をディスプレイ12に表示させるようになっていても良い。
【0042】
また、CPU18bは、周辺映像40a〜40fを透過させる他の画像として経路映像50をディスプレイ12に表示させるようになっているが、周辺映像40a〜40fを透過させる他の画像として経路映像50以外の映像をディスプレイ12に表示させるようになっていても良い。
【0043】
なお、制御装置18は、ROM18aによって記憶された各種制御プログラムによって各種機能を実現するようになっているが、ソフトウェアを使用せずにハードウェアのみによって各種機能を実現するようになっていても良い。
【産業上の利用可能性】
【0044】
以上のように、本発明に係る表示制御装置は、車両の周辺の映像以外の映像と、車両の周辺の映像とを表示装置に同時に表示させることができるという効果を有し、ナビゲーション用の映像と、車両の周辺の映像とを表示装置に同時に表示させる表示制御装置等として有用である。
【図面の簡単な説明】
【0045】
【図1】本発明の一実施の形態に係る運転支援システムのハードウェアブロック図
【図2】図1に示す運転支援システムが搭載された車両の上面図
【図3】図1に示す運転支援システムの大容量記憶装置に記憶された車両状態判定テーブルを示す図
【図4】図1に示す運転支援システムの大容量記憶装置に記憶された重要度判定テーブルを示す図
【図5】図1に示す運転支援システムの動作のフローチャート
【図6】図1に示す運転支援システムのディスプレイが周辺映像を表示しているときのディスプレイの正面図
【図7】図6に示すディスプレイが経路映像を表示しているときのディスプレイの正面図
【図8】図6に示すディスプレイが周辺映像及び経路映像を同時に表示しているときのディスプレイの正面図
【図9】(a)図2に示す車両がT字交差点の手前でT字交差点に向かって直進しているときの車両の周辺の上面図 (b)図2に示す車両がT字交差点の直前で左折しているときの車両の周辺の上面図 (c)図2に示す車両がT字交差点で左折しているときの車両の周辺の上面図
【図10】図2に示す車両が図9(a)に示す状態であるときの図6に示すディスプレイの正面図
【図11】図2に示す車両が図9(b)に示す状態であるときの図6に示すディスプレイの正面図
【図12】図2に示す車両が図9(c)に示す状態であるときの図6に示すディスプレイの正面図
【図13】(a)図2に示す車両が十字交差点の手前で十字交差点に向かって直進しているときの車両の周辺の上面図 (b)図2に示す車両が十字交差点の直前で右折しているときの車両の周辺の上面図 (c)図2に示す車両が十字交差点で右折しているときの車両の周辺の上面図
【図14】図2に示す車両が図13(a)に示す状態であるときの図6に示すディスプレイの正面図
【図15】図2に示す車両が図13(b)に示す状態であるときの図6に示すディスプレイの正面図
【図16】図2に示す車両が図13(c)に示す状態であるときの図6に示すディスプレイの正面図
【図17】表示画面上における周辺映像の表示領域の位置が変化するときの図6に示すディスプレイの正面図
【図18】表示画面上における周辺映像の表示領域同士の比率が変化するときの図6に示すディスプレイの正面図
【図19】表示画面上における周辺映像の表示領域が3つであるときの図6に示すディスプレイの正面図
【符号の説明】
【0046】
11a 左前カメラ(撮影装置)
11b 前カメラ(撮影装置)
11c 右前カメラ(撮影装置)
11d 左後カメラ(撮影装置)
11e 後カメラ(撮影装置)
11f 右後カメラ(撮影装置)
12 ディスプレイ(表示装置)
12A 表示画面
12a〜12f 表示領域
18 制御装置(表示制御装置)
18a ROM(制御手段)
18b CPU(制御手段)
18c RAM(制御手段)
40a 左前周辺映像(撮影画像)
40b 前周辺映像(撮影画像)
40c 右前周辺映像(撮影画像)
40d 左後周辺映像(撮影画像)
40e 後周辺映像(撮影画像)
40f 右後周辺映像(撮影画像)
50 経路映像(他の画像)
90 車両
【特許請求の範囲】
【請求項1】
各撮影装置で得られた撮影画像と他の画像とを表示装置の表示領域に重畳表示させ、各撮影装置で得られた撮影画像をそれぞれ異なる表示領域で表示させる表示制御装置であって、
記憶媒体上のデータが示す車両の状況および道路の状況に応じて前記撮影画像と前記他の画像との相対透過率を前記表示領域ごとに異ならせて表示させる制御手段を備えた表示制御装置。
【請求項2】
前記制御手段は、記憶媒体上のデータが示す車両の状況に応じて前記撮影画像と前記他の画像との相対透過率を連続的に変化させることを特徴とする請求項1に記載の表示制御装置。
【請求項3】
前記制御手段は、前記車両の経路の映像を前記他の画像として前記表示装置に表示させ、前記経路の映像中の方位と、前記表示装置の表示画面上の方向との対応関係が固定であるときに、前記表示画面上における前記表示領域の位置を前記経路の映像中の前記車両の進行方向の変化に応じて変化させることを特徴とする請求項1に記載の表示制御装置。
【請求項4】
前記制御手段は、前記車両の周辺の地図情報と、前記車両の位置と、前記車両の進行方向とに応じて前記表示装置の表示画面上における複数の前記表示領域同士の比率を設定することを特徴とする請求項1に記載の表示制御装置。
【請求項1】
各撮影装置で得られた撮影画像と他の画像とを表示装置の表示領域に重畳表示させ、各撮影装置で得られた撮影画像をそれぞれ異なる表示領域で表示させる表示制御装置であって、
記憶媒体上のデータが示す車両の状況および道路の状況に応じて前記撮影画像と前記他の画像との相対透過率を前記表示領域ごとに異ならせて表示させる制御手段を備えた表示制御装置。
【請求項2】
前記制御手段は、記憶媒体上のデータが示す車両の状況に応じて前記撮影画像と前記他の画像との相対透過率を連続的に変化させることを特徴とする請求項1に記載の表示制御装置。
【請求項3】
前記制御手段は、前記車両の経路の映像を前記他の画像として前記表示装置に表示させ、前記経路の映像中の方位と、前記表示装置の表示画面上の方向との対応関係が固定であるときに、前記表示画面上における前記表示領域の位置を前記経路の映像中の前記車両の進行方向の変化に応じて変化させることを特徴とする請求項1に記載の表示制御装置。
【請求項4】
前記制御手段は、前記車両の周辺の地図情報と、前記車両の位置と、前記車両の進行方向とに応じて前記表示装置の表示画面上における複数の前記表示領域同士の比率を設定することを特徴とする請求項1に記載の表示制御装置。
【図1】


【図2】
【図3】
【図4】
【図5】

【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】

【図13】
【図14】
【図15】

【図16】
【図17】
【図18】

【図19】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【公開番号】特開2006−205971(P2006−205971A)
【公開日】平成18年8月10日(2006.8.10)
【国際特許分類】
【出願番号】特願2005−23006(P2005−23006)
【出願日】平成17年1月31日(2005.1.31)
【出願人】(000005821)松下電器産業株式会社 (73,050)
【Fターム(参考)】
【公開日】平成18年8月10日(2006.8.10)
【国際特許分類】
【出願日】平成17年1月31日(2005.1.31)
【出願人】(000005821)松下電器産業株式会社 (73,050)
【Fターム(参考)】
[ Back to top ]