
表示装置、電子カメラ、表示システム及びカメラシステム
【課題】 本発明は、例えばユーザの見る姿勢に応じて立体視が容易となる手段を提供する。
【解決手段】 表示装置は、表示部と、読込部と、立体画像生成部と、姿勢情報取得部と、表示制御部とを備える。表示部は、画像を表示する。読込部は、第1姿勢での立体視用の第1立体画像を生成するための第1姿勢情報と第2姿勢での立体視用の第2立体画像を生成するための第2姿勢情報とが関連付けて記録されている、第1立体画像及び第2立体画像の元になる複数の画像を読み込む。立体画像生成部は、第1姿勢情報と第2姿勢情報とに基づいて、第1立体画像と第2立体画像とを複数の画像から各々生成する。姿勢情報取得部は、現在の姿勢を示す姿勢情報を取得する。表示制御部は、姿勢情報に基づいて第1姿勢と第2姿勢との何れかを判別し、判別結果に応じて、第1立体画像と第2立体画像との何れかを表示部に切り替え自在に表示させる。
【解決手段】 表示装置は、表示部と、読込部と、立体画像生成部と、姿勢情報取得部と、表示制御部とを備える。表示部は、画像を表示する。読込部は、第1姿勢での立体視用の第1立体画像を生成するための第1姿勢情報と第2姿勢での立体視用の第2立体画像を生成するための第2姿勢情報とが関連付けて記録されている、第1立体画像及び第2立体画像の元になる複数の画像を読み込む。立体画像生成部は、第1姿勢情報と第2姿勢情報とに基づいて、第1立体画像と第2立体画像とを複数の画像から各々生成する。姿勢情報取得部は、現在の姿勢を示す姿勢情報を取得する。表示制御部は、姿勢情報に基づいて第1姿勢と第2姿勢との何れかを判別し、判別結果に応じて、第1立体画像と第2立体画像との何れかを表示部に切り替え自在に表示させる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、表示装置、電子カメラ、表示システム及びカメラシステムに関する。
【背景技術】
【0002】
従来、複数の撮像手段を備えた複眼用の電子カメラが提案されている(例えば、特許文献1参照)。上記の電子カメラでは、ユーザが3次元的に立体視するための右目用の画像と左目用の画像とを撮影する。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2010−103895号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上記の電子カメラで撮影された画像を立体視する場合、例えばユーザの見る姿勢によっては、立体視することが困難になるという問題がある。
【0005】
そこで、本発明は、上記事情に鑑み、例えばユーザの見る姿勢に応じて立体視が容易となる手段を提供することを目的とする。
【課題を解決するための手段】
【0006】
本発明の一態様の表示装置は、表示部と、読込部と、立体画像生成部と、姿勢情報取得部と、表示制御部とを備える。表示部は、画像を表示する。読込部は、第1姿勢での立体視用の第1立体画像を生成するための第1姿勢情報と第2姿勢での立体視用の第2立体画像を生成するための第2姿勢情報とが関連付けて記録されている、第1立体画像及び第2立体画像の元になる複数の画像を読み込む。立体画像生成部は、第1姿勢情報と第2姿勢情報とに基づいて、第1立体画像と第2立体画像とを複数の画像から各々生成する。姿勢情報取得部は、現在の姿勢を示す姿勢情報を取得する。表示制御部は、姿勢情報に基づいて第1姿勢と第2姿勢との何れかを判別し、判別結果に応じて、第1立体画像と第2立体画像との何れかを表示部に切り替え自在に表示させる。
【0007】
本発明の一態様の表示装置は、表示部と、読込部と、姿勢情報取得部と、表示制御部とを備える。表示部は、画像を表示する。読込部は、第1姿勢での立体視用の第1立体画像と、第2姿勢での立体視用の第2立体画像とを読み込む。姿勢情報取得部は、現在の姿勢を示す姿勢情報を取得する。表示制御部は、姿勢情報に基づいて第1姿勢と第2姿勢との何れかを判別し、判別結果に応じて、第1立体画像と第2立体画像との何れかを表示部に切り替え自在に表示させる。
【0008】
本発明の一態様の電子カメラは、第1撮像素子と、第2撮像素子と、第3撮像素子と、姿勢情報作成部と、記録処理部とを備える。第1撮像素子は、第1撮影光学系からの被写体光を撮像して第1画像を生成する。第2撮像素子は、第2撮影光学系からの被写体光を撮像して第2画像を生成する。第3撮像素子は、第3撮影光学系からの被写体光を撮像して第3画像を生成する。姿勢情報作成部は、第1画像と第2画像と第3画像とのうちから選択した2種類の画像に基づいて、第1姿勢での立体視用の第1立体画像を生成するための第1姿勢情報を作成すると共に、第1姿勢情報の作成の際に選択されなかった画像を含む2種類の画像に基づいて、第2姿勢での立体視用の第2立体画像を生成するための第2姿勢情報を作成する。記録処理部は、第1姿勢情報と第2姿勢情報とを各々対応する画像に関連付けてメモリに記録する。
【0009】
本発明の一態様の表示システムは、請求項1から請求項3の何れか1項に記載の表示装置と、立体視用の立体視メガネとを備える。立体視メガネは、メガネ側姿勢センサと、姿勢情報判定部と、メガネ側通信部とを有する。メガネ側姿勢センサは、立体視メガネ本体の姿勢を検出する。姿勢情報判定部は、メガネ側姿勢センサの検出結果に基づいて、第1姿勢と第2姿勢との何れかを判定する。メガネ側通信部は、姿勢情報判定部の判定結果を示す姿勢情報を表示装置に送信する。表示装置は、装置側通信部を有する。装置側通信部は、メガネ側通信部から姿勢情報を受信する。姿勢情報取得部は、装置側通信部を介して姿勢情報を取得する。
【0010】
本発明の一態様のカメラシステムは、請求項8又請求項9に記載の電子カメラと、立体視用の立体視メガネとを備える。立体視メガネは、メガネ側姿勢センサと、姿勢情報判定部と、メガネ側通信部とを有する。メガネ側姿勢センサは、立体視メガネ本体の姿勢を検出する。姿勢情報判定部は、メガネ側姿勢センサの検出結果に基づいて、第1姿勢と第2姿勢との何れかを判定する。メガネ側通信部は、姿勢情報判定部の判定結果を示す姿勢情報を表示装置に送信する。電子カメラは、カメラ側通信部を有する。カメラ側通信部は、メガネ側通信部から姿勢情報を受信する。姿勢情報取得部は、カメラ側通信部を介して姿勢情報を取得する。
【発明の効果】
【0011】
本発明は、例えばユーザの見る姿勢に応じて立体視が容易となる手段を提供できる。
【図面の簡単な説明】
【0012】
【図1】電子カメラ1の構成例を示すブロック図
【図2】電子カメラ1の筐体の正面図及び背面図
【図3】第1立体視メガネ50の正面図
【図4】第1立体視メガネ50の電気系統の装置53の構成例を示すブロック図
【図5】カメラシステム100の構成例を示す図
【図6】電子カメラ1の動作の一例を示すフローチャート
【図7】3D撮影モードにおける構図の一例を説明する図
【図8】画像ファイルの構成の一例を説明する図
【図9】電子カメラ1における立体画像の再生動作の一例を示すフローチャート
【図10】立体画像の再生処理を説明する図
【図11】立体画像の再生処理を説明する図
【図12】第2変形例を説明する図
【図13】第3変形例を説明する図
【図14】第4変形例を説明する図
【図15】第2立体視メガネ60の正面図
【図16】第2立体視メガネ60の構成例を示すブロック図
【図17】動画像による立体画像の生成処理を説明する図
【図18】カメラシステム200の構成例を示す図
【図19】電子カメラ2、3、4の構成例を示すブロック図
【図20】表示システム300の構成例を示す図
【図21】表示装置70の構成例を示すブロック図
【発明を実施するための形態】
【0013】
(第1実施形態)
以下、図面に基づいて本発明の実施の形態を詳細に説明する。第1実施形態では、本発明のカメラシステムの一実施形態について説明する。先ず、電子カメラ1の構成を説明した後、第1立体視メガネ50の構成について説明する。その後、カメラシステム100の動作の一例について説明する。
【0014】
図1は、電子カメラ1の構成例を示すブロック図である。ここで、電子カメラ1は、立体画像を撮影するための「3D撮影モード」を有している。3D撮影モードでは、両眼視差を利用して右目用の画像と左目用の画像(動画像も含む)を撮影する撮影モードである。立体画像には、後述する第1立体画像や第2立体画像を含む。本実施形態の3D撮影モードでは、例えばユーザの見る姿勢に応じて立体視が容易となる画像を取得する。
【0015】
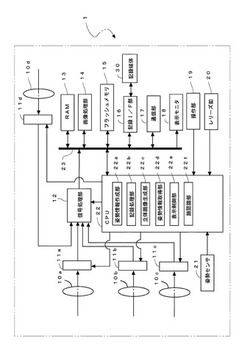
電子カメラ1は、第1撮影光学系10aと、第2撮影光学系10bと、第3撮影光学系10cと、第4撮影光学系10dと、第1撮像素子11aと、第2撮像素子11bと、第3撮像素子11cと、第4撮像素子11dと、信号処理部12と、RAM(Random Access Memory)13と、画像処理部14と、フラッシュメモリ15と、記録インターフェース部(以下「記録I/F部」という)16と、通信部17と、表示モニタ18と、操作部19と、レリーズ釦20と、姿勢センサ21と、CPU(Central Processing Unit)22と、バス23とを備える。
【0016】
このうち、信号処理部12、RAM13、画像処理部14、フラッシュメモリ15、記録I/F部16、通信部17、表示モニタ18及びCPU22は、バス23を介して互いに接続されている。また、第1撮像素子11a、第2撮像素子11b、第3撮像素子11c、第4撮像素子11d、信号処理部12、操作部19、レリーズ釦20及び姿勢センサ21は、CPU22に接続されている。
【0017】
第1撮影光学系10aは、焦点距離を調整するズームレンズと、撮像素子11aの撮像面での結像位置を調整するフォーカスレンズとを含む複数のレンズ群で構成されている。レンズ駆動部(不図示)は、第1撮影光学系10a内でズームレンズやフォーカスレンズのレンズ位置をCPU22の指示に応じて光軸方向に調整する。なお、簡単のため、図1では、第1撮影光学系10a、第2撮影光学系10b、第3撮影光学系10c及び第4撮影光学系10dを1枚のレンズとして図示する。
【0018】
第1撮像素子11aは、単位時間当たりの光量を調節する絞り(不図示)を通過した被写体光を撮像し、アナログの画像信号を生成する。そして、第1撮像素子11aが出力するアナログの画像信号は、信号処理部12に入力される。なお、第1撮像素子11aの撮像面には、R(赤)、G(緑)B(青)の3種類のカラーフィルタが例えばベイヤー配列で配置されている。また、第1撮像素子11aの電荷蓄積時間及び画像信号の読み出しは、タイミングジェネレータ(不図示)によって制御される。第1撮像素子11aは、CCD(Charge Coupled Device)型又はCMOS(Complementary Metal−Oxide Semiconductor)型のカラーイメージセンサである。
【0019】
なお、第2撮影光学系10b、第3撮影光学系10c及び第4撮影光学系10dについては、第1撮影光学系10aと同様の構成であるので説明を省略する。また、第2撮像素子11b、第3撮像素子11c、第4撮像素子11dについても、第1撮影素子11aと同様の構成であるので説明を省略する。
【0020】
また、本実施形態では、説明の便宜上、第1撮像素子11aが出力する画像を第1画像とし、第2撮像素子11bが出力する画像を第2画像とする。また、本実施形態では、第3撮像素子11cが出力する画像を第3画像とし、第4撮像素子11dが出力する画像を第4画像とする。この第4画像は、第1画像よりも解像度の低いスルー画像であって、立体画像生成用の画像ではなく、表示モニタ18に表示された立体画像を見るユーザの顔を認識するために用いられる。
【0021】
ここで、通常の撮影モードで2次元の記録用画像(本画像)を撮影する場合、第1撮像素子11aは、レリーズ釦20の全押し操作に応答して本画像(第1画像)を撮像する。また、3D撮影モードでは、第1撮像素子11a、第2撮像素子11b及び第3撮像素子11cは、レリーズ釦20の全押し操作に同期して、立体画像の元になる本画像(第1画像、第2画像、第3画像)を各々撮像する。
【0022】
信号処理部12は、通常の撮影モードの場合、第1撮像素子11aが出力するアナログの画像信号をデジタル信号(画像データ)に変換しバス23に出力する。また、信号処理部12は、3D撮影モードでは、第1撮像素子11a、第2撮像素子11b及び第3撮像素子11cが出力するアナログの画像信号をデジタル信号(画像データ)に変換しバス23に各々出力する。また、信号処理部12は、顔認識部22fが顔認識処理を行なう場合、第4撮像素子11dが出力するアナログの画像信号をデジタル信号(画像データ)に変換しバス23に出力する。
【0023】
RAM13は、揮発性のメモリであり、信号処理部12が出力する画像データは、バス23を介して画像データとしてRAM13に一時記録される。画像処理部14は、RAM13に記録されている画像データを読み出し、各種の画像処理(階調変換処理、輪郭強調処理、ホワイトバランス処理等)を施す。
【0024】
フラッシュメモリ15は、書き換え可能な不揮発性の半導体メモリである。フラッシュメモリ15には、電子カメラ1の制御を行なうプログラム等が予め記録されている。CPU22は、このプログラムに従い、一例として後述の図6及び図9に示すフローの処理を実行する。
【0025】
記録I/F部16には、着脱自在の記録媒体30を接続するためのコネクタ(不図示)が形成されている。そして、記録I/F部16は、そのコネクタに接続された記録媒体30にアクセスして本画像の記録処理等を行なう。この記録媒体30は、例えば、カード型の不揮発性のメモリカードである。図1では、コネクタに接続された後の記録媒体30を示している。
【0026】
通信部17は、第1立体視メガネ50の姿勢情報の受信を実現するための通信インターフェースを提供する。例えば、通信部17は、赤外線通信を行なう通信インターフェースを提供する。これにより、通信部17は、第1立体視メガネ50側から姿勢情報を受信する。
【0027】
表示モニタ18は、例えば液晶表示媒体により構成される。そして、表示モニタ17は、2次元の2D画像、立体画像(3D画像)、電子カメラ1の操作メニュー等を表示する。操作部19は、撮影者の操作を受け付ける複数の釦を有しており、電子カメラ1を操作するための指示入力を受け付ける。レリーズ釦20は、半押し操作(撮影前におけるオートフォーカス(AF)や自動露出(AE)等の動作開始の指示入力)と全押し操作(記録媒体30に記録する本画像を取得するための撮像動作開始)との指示入力とを受け付ける。姿勢センサ21は、電子カメラ本体の姿勢を検出する。なお、姿勢センサ21の詳細については、第2変形例で説明する。
【0028】
CPU22は、各種演算及び電子カメラ1の統括的な制御を行なうマイクロプロセッサである。CPU22は、上記のプログラムを実行することにより、電子カメラ1の各部の制御等を行なう。CPU22は、姿勢情報作成部22a、記録処理部22b、立体画像生成部22c、姿勢情報取得部22d、表示制御部22e、顔認識部22fとしても機能する。
【0029】
姿勢情報作成部22aは、第1画像と第2画像と第3画像とのうちから選択した2種類の画像に基づいて、第1姿勢での立体視用の第1立体画像を生成するための第1姿勢情報を作成する。また、姿勢情報作成部22aは、第1姿勢情報の作成の際に選択されなかった画像を含む2種類の画像に基づいて、第2姿勢での立体視用の第2立体画像を生成するための第2姿勢情報を作成する。ここで、本実施形態では、一例として、ユーザが起立又は座っている状態で正面を向いている状態を第1姿勢とし、第1姿勢から時計回り(又は反時計回り)に略90度、横になっている状態を第2姿勢とする。
【0030】
記録処理部22bは、第1姿勢情報と第2姿勢情報とを各々対応する画像に関連付けた画像ファイルとして、RAM13、フラッシュメモリ15又は記録媒体30に記録する。立体画像生成部22cは、第1姿勢情報と第2姿勢情報とに基づいて、第1立体画像と第2立体画像とを複数の画像から各々生成する(詳細は後述する)。姿勢情報取得部22dは、現在の姿勢を示す姿勢情報を取得する。例えば、姿勢情報取得部22dは、第1立体視メガネ50からの姿勢情報を通信部17を介して取得し、RAM13に一時記録する。
【0031】
表示制御部22eは、姿勢情報取得部22dが取得した姿勢情報に基づいて第1姿勢と第2姿勢との何れかを判別し、判別結果に応じて、第1立体画像と第2立体画像との何れかを表示モニタ18に切り替え自在に表示させる。顔認識部22fは、第4撮像素子11dが出力する画像から人物の顔を認識する。なお、顔認識部22fの詳細については、第1変形例で説明する。
【0032】
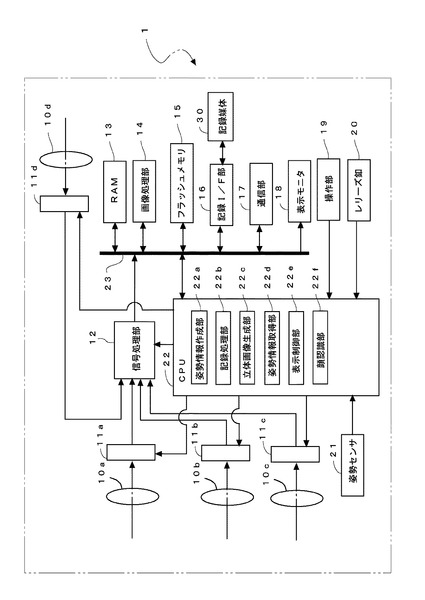
次に各撮影光学系の配置について説明する。図2は、電子カメラ1の筐体の正面図及び背面図である。図2(a)は、電子カメラ1の筐体の正面図である。電子カメラ1の筐体の正面には、同一の被写体を複数の視点から撮影するため、撮影光学系10a、10b、10cの撮影レンズが設けられている。撮影光学系10aの光軸L1と撮影光学系10bの光軸L2とは、両眼視差の距離(例えば、人間の瞳孔間距離の平均値(65mm))だけ離れており、撮影光学系10bの光軸L2と撮影光学系10cの光軸L3とは、両眼視差の距離(例えば、65mm)だけ離れている。この配置により、電子カメラ1は、撮影光学系10aと撮影光学系10bとから第1姿勢での立体視用の第1立体画像の元になる一対の画像を取得すると共に、撮影光学系10bと撮影光学系10cとから第2姿勢での立体視用の第2立体画像の元になる一対の画像を取得することができる。また、電子カメラ1の筐体の上面には、レリーズ釦20と電源釦24が設けられている。
【0033】
図2(b)は、電子カメラ1の筐体の背面図である。電子カメラ1の筐体の背面には、撮影光学系10dの撮影レンズ、表示モニタ18、モード選択釦19a、メニュー釦19b及び選択・決定釦19cが設けられている。なお、撮影光学系10dの撮影レンズが、電子カメラ1の筐体の背面に設けられているのは、ユーザが立体画像を表示モニタ18で見る際、必要に応じて顔認識部22fがユーザの顔認識をするためである。
【0034】
また、本実施形態の操作部19は、モード選択釦19aと、メニュー釦19bと、選択・決定釦19cと、電源釦24とを含む。モード選択釦19aは、撮影モード若しくは再生モードに切り替える操作をユーザから受け付ける。メニュー釦19bは、メニュー画面を立ち上げるための操作をユーザから受け付ける。選択・決定釦19cは、電子カメラ1の操作メニューにおける設定条件等の項目選択又は項目決定をユーザから受け付ける。ここで、選択・決定釦19cは、決定釦19dとダイヤル19eとを有する。ダイヤル19eの全体形状は、環状であって、ダイヤル19eの内周側には決定釦19dが配置されている。そして、ダイヤル19eは、例えばメニュー画面等での項目選択の入力をユーザから受け付ける。また、決定釦19dは、メニュー画面等での項目決定の入力をユーザから受け付ける。例えば、3D撮影モードを開始する操作が決定釦19dに割り当てられている。
【0035】
次に、立体視メガネの構成について、説明する。図3は、第1立体視メガネ50の正面図である。図3に示す第1立体視メガネ50は、一例として、静止画用の偏光フィルタ方式のメガネ(偏光フィルタメガネ)である。第1立体視メガネ50は、左目用レンズ51の表面に第1フィルタ(垂直偏光)が設け、右目用レンズ52の表面に第2フィルタ(水平偏光)を配置している。これにより、ユーザの左目には、垂直偏光の画像(左目用の画像)が見え、ユーザの右目には、水平偏光の画像(右目用の画像)が見えることにより、ユーザは、3D画像として被写体(立体像)を認識することができる。また、第1立体視メガネ50の上面には、電気系統の装置53を備える。
【0036】
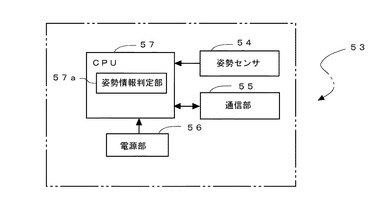
図4は、第1立体視メガネ50の電気系統の装置53の構成例を示すブロック図である。電気系統の装置53は、姿勢センサ54、通信部55、電源部56及びCPU57を備える。姿勢センサ54は、第1立体視メガネ50の姿勢を検出する。ここで、姿勢センサ54は、後述する図10(d)に示す横位置の状態であるか、又は、図11(d)に示す縦位置の状態であるかを検出する。
【0037】
具体的には、姿勢センサ54は、例えば、静電容量型の加速度センサであって、3次元方向(X軸、Y軸、Z軸の3軸方向)の加速度を計測する。すなわち、姿勢センサ54は、検出した各軸方向における検出値を、CPU57の姿勢情報判定部57aに送信する。姿勢情報判定部57aは、姿勢センサ54の検出値に基づいて、第1立体視メガネ50本体に生じた3軸方向の加速度の合成値を検出する。そして、姿勢情報判定部57aは、その合成値に基づいて、第1立体視メガネ50の回転角度を求める。なお、説明を簡単にするため、第1立体視メガネ50の姿勢は、電源オンの後、ユーザが第1立体視メガネ50を装着した状態で横位置の状態にあることにする。この状態を基準とし、姿勢情報判定部57aは、例えば、第1立体視メガネ50が時計回り(又は反時計回り)に略90度回転して、縦位置の状態になるか否かを判定する。そして、第1立体視メガネ50が時計回りで縦位置の状態になった場合、姿勢情報判定部57aは、その後、反時計周りに略90度回転して横位置に戻るか否かを判定する。また、第1立体視メガネ50が反時計回りで縦位置の状態になった場合、姿勢情報判定部57aは、その後、時計周りに略90度回転して横位置に戻るか否かを判定する。これにより、姿勢情報判定部57aは、第1立体視メガネ50の姿勢を縦位置か横位置かの何れかを判定することができる。
【0038】
なお、第1実施形態では、加速度センサとして、静電容量型の加速度センサを採用したが、例えばピエゾ抵抗型の加速度センサ等の他の方式の加速度センサを採用しても良い。
【0039】
通信部55は、電子カメラ1に姿勢情報のデータの送信をするための通信インターフェースを提供する。電源部56は、姿勢センサ54、通信部55及びCPU57に電力を供給する。CPU57は、各種演算及び第1立体視メガネ50の統括的な制御を行なうマイクロプロセッサである。CPU57は、姿勢情報判定部57aとしても機能する。姿勢情報判定部57aは、上述した通り、姿勢センサ54の検出結果に基づいて、ユーザが第1姿勢と第2姿勢との何れかを判定する。通信部55は、電子カメラ1に判定結果を示す姿勢情報を送信する。なお、姿勢センサ54は、電源オンの後、継続的に第1立体視メガネ50の姿勢を検出し続ける。
【0040】
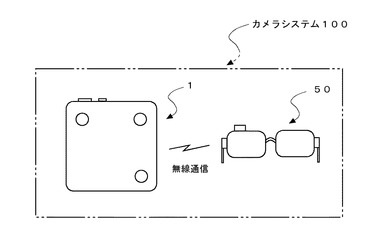
図5は、カメラシステム100の構成例を示す図である。カメラシステム100は、電子カメラ1と、第1立体視メガネ50とを備える。電子カメラ1は、第1立体視メガネ50側から姿勢情報を受信するため、例えば、赤外線通信を行なう。
【0041】
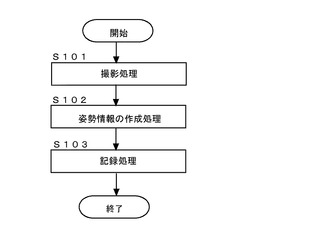
次に、電子カメラ1の3D撮影モード時における撮影動作の一例を説明する。図6は、電子カメラ1の撮影動作の一例を示すフローチャートである。以下の動作例では、電源オンの後、操作部19は、撮影モードとして静止画用の「3D撮影モード」が指示入力を受け付けると、CPU22は、図6に示すフローの処理を開始する。表示モニタ18は、例えば、第1撮像素子11aが出力するスルー画像を表示する。
【0042】
ステップS101:CPU22は、レリーズ釦20が全押し操作の指示入力を受け付けることにより、撮影処理を行なう。具体的には、CPU22は、レリーズ釦20の全押し操作に同期して、立体画像の元になる本画像(第1画像、第2画像、第3画像)を各々撮像させる指示をタイミングジェネレータ(不図示)を介して出す。第1撮像素子11a、第2撮像素子11b及び第3撮像素子11cは、立体画像の元になる本画像を各々出力する。信号処理部12は、第1撮像素子11a、第2撮像素子11b及び第3撮像素子11cが出力するアナログの画像信号をデジタル信号に変換しバス23に各々出力する。信号処理部12が出力するデジタル信号は、バス23を介して画像データとしてRAM13に一時記録される。
【0043】
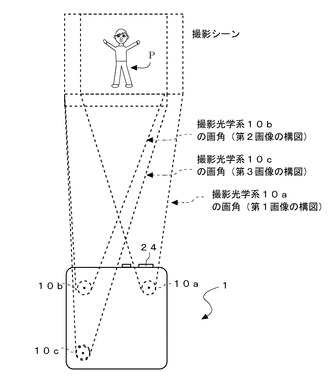
図7は、3D撮影モードにおける構図の一例を説明する図である。図7では、図2(a)に示す電子カメラ1の正面図を反転させて描いており、説明をわかりやすくするため、背面の表示モニタ18等の図示を省略している。電子カメラ1には、上述した通り、同一の被写体を3箇所の視点から撮影するため、撮影光学系10a、10b、10cの撮影レンズが設けられている。電子カメラ1は、図7の場合、人物Pの被写体に対し、第1画像の構図、第2画像の構図及び第3画像の構図で撮影する。これにより、電子カメラ1は、撮影光学系10aと撮影光学系10bとから第1姿勢での立体視用の第1立体画像の元になる一対の画像(第1画像、第2画像)を取得すると共に、撮影光学系10bと撮影光学系10cとから第2姿勢での立体視用の第2立体画像の元になる一対の画像(第2画像、第3画像)を取得する。
【0044】
ステップS102:CPU22の姿勢情報作成部22aは、第1姿勢情報及び第2姿勢情報を作成する。具体的には、姿勢情報作成部22aは、第1画像と第2画像に基づいて、第1姿勢情報を作成する。ここで、第1姿勢情報は、第1画像と第2画像とから第1姿勢での立体視用の第1立体画像を生成することを表す情報である。
【0045】
また、姿勢情報作成部22aは、第2画像と第3画像に基づいて、第2姿勢情報を作成する。ここで、第2姿勢情報は、第2画像と第3画像とから第2姿勢での立体視用の第2立体画像を生成することを表す情報である。
【0046】
ステップS103:CPU22の記録処理部22bは、記録処理を行なう。具体的には、記録処理部22bは、第1姿勢情報と第2姿勢情報とを各々対応する画像に関連付けた画像ファイルとして記録媒体30に記録する。
【0047】
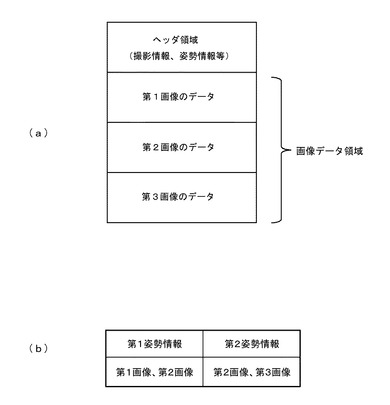
図8は、画像ファイルの構成の一例を説明する図である。図8(a)は、Exif(Exchangeable Image File Format)形式の画像ファイルの構成を模式的に示した図である。図8(b)は、第1姿勢情報、第2姿勢情報を示す図である。
【0048】
ここで、画像ファイルは、ヘッダ領域と画像データ領域とを有する。カメラ情報(焦点距離等の撮影情報)は、タグデータとしてヘッダ領域に記録される。また、第1画像、第2画像、第3画像の画像データは、図8(a)に示す画像データ領域に記録される。
【0049】
なお、ヘッダ領域には、メーカ独自のフォーマットでデータを記録できるメーカノートの領域がある。記録処理部22bは、第1姿勢情報、第2姿勢情報を画像ファイルのメーカノートの領域に書き込む。また、記録処理部22bは、RAM13から一時記録された第1画像、第2画像、第3画像の画像データを読み出して画像ファイルの画像データ領域に書き込む。記録処理部22bは、その画像ファイルを記録媒体30に記録する。この記録処理により、立体画像の元になる画像ファイルが得られる。そして、CPU22は、図6に示すフローの処理を終了させる。
【0050】
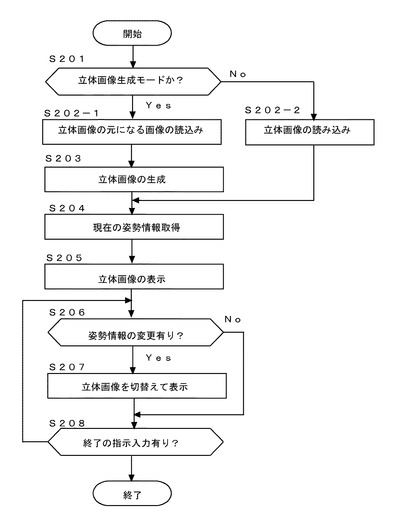
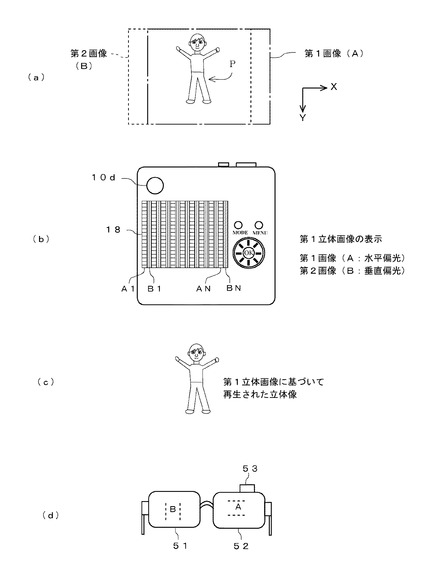
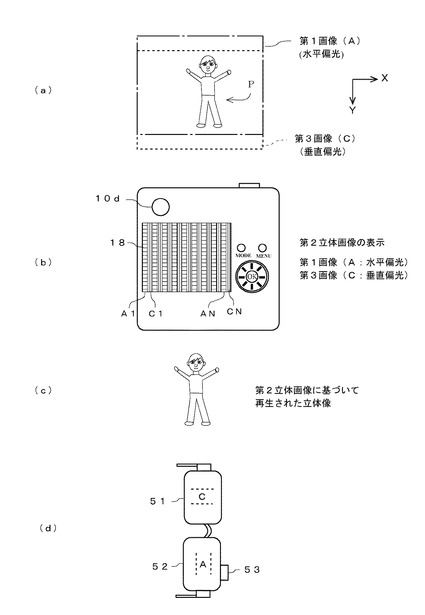
次に立体画像の再生について説明する。図9は、電子カメラ1における立体画像の再生動作の一例を示すフローチャートである。図10、図11は、立体画像の再生処理を説明する図である。
【0051】
以下の動作例では、電子カメラ1の電源オンの後、操作部19は、再生モードとして「3D再生モード」が指示入力を受け付けると、CPU22は、図9に示すフローの処理を開始する。ここで、3D再生モードでは、下位のモードとして、立体画像の元になる画像を読み込んだ後に立体画像を生成する「立体画像生成モード」と、例えば電子カメラ1により既に記録済みの立体画像を読み込む「立体画像読込みモード」とがある。そのため、立体画像読込みモードでは、立体画像生成部22cの処理(後述するステップS203の処理)が不要となる。
【0052】
操作部19は、立体画像生成モードと立体画像読込みモードとの何れかの選択入力を受け付ける。なお、ユーザは第1立体視メガネ50を装着しており、この第1立体視メガネ50の電源がオンになっていることとする。これにより、第1立体視メガネ50の姿勢センサ54は、継続的に第1立体視メガネ50の姿勢を検出し続ける。CPU57の姿勢情報判定部57aは、姿勢センサ54の検出結果に基づいて、ユーザが第1姿勢と第2姿勢との何れかを判定する。通信部55は、電子カメラ1に判定結果を示す姿勢情報を無線(赤外線通信)にて継続的に送信する。
【0053】
ステップS201:CPU22は、立体画像生成モードか否かを判定する。立体画像生成モードの場合(ステップS201:Yes)、CPU22は、ステップS202−1の処理に移行する。一方、立体画像生成モードでなく、立体画像読込みモードの場合(ステップS201:No)、ステップS202−2の処理に移行する。
【0054】
ステップS202−1:CPU22の立体画像生成部22cは、立体画像の生成を行なう。具体的には、立体画像生成部22cは、記録媒体30から第1立体画像と第2立体画像の元になる画像ファイルを読み出して、RAM13の作業領域に一時記録する。そして、CPU22は、ステップS203の処理に移行する。
【0055】
ステップS202−2:CPU22は、例えば、記録媒体30から第1立体画像と第2立体画像を読み込み、RAM13に一時記録する。そして、CPU22は、ステップS204の処理に移行する。
【0056】
ステップS203:CPU22の立体画像生成部22cは、立体画像の生成を行なう。具体的には、立体画像生成部22cは、RAM13の作業領域から画像ファイルを読み出して、立体画像を生成する。すなわち、立体画像生成部22cは、図10(a)に示す第1画像AをY方向に複数の縦一列のラインに分割し、奇数ラインの画像(A1からAN)を抽出する。一方、立体画像生成部22cは、図10(a)に示す第2画像BをY方向に複数の縦一列のライン(第1画像と同数のライン)に分割し、偶数ラインの画像(B1からBN)を抽出する。なお、立体画像生成部22cは、複数列のRGBの画素列を縦一列のラインとしても良い。
【0057】
そして、立体画像生成部22cは、第1画像Aのうち奇数ラインの画像(A1からAN)と第2画像Bのうち偶数ラインの画像(B1からBN)とに基づいて、A1、B1、A2、B2、A3、B3、・・・AN、BNとなるようにして第1立体画像を生成する(図10(b)参照)
同様にして、立体画像生成部22cは、第1画像Aのうち奇数ラインの画像(A1からAN)と、第3画像Cのうち偶数ラインの画像(C1からCN)とに基づいて、A1、C1、A2、C2、A3、C3、・・・AN、CNとなるようにして第2立体画像を生成する(図11(b)参照)。そして、CPU22は、ステップS204の処理に移行する。
【0058】
ステップS204:CPU22の姿勢情報取得部22dは、現在の姿勢を示す姿勢情報を取得する。具体的には、姿勢情報取得部22dは、第1立体視メガネ50からの姿勢情報を通信部17を介して取得し、RAM13に順次上書きして記録する。
【0059】
ステップS205:CPU22の表示制御部22eは、立体画像を表示モニタ18に表示させる。具体的には、表示制御部22eは、RAM13から姿勢情報を読み出して、第1姿勢と第2姿勢との何れかを判別する。そして、表示制御部22eは、判別結果が第1姿勢の場合、第1立体画像を表示モニタ18に表示させる(図10(b)参照)。一方、表示制御部22eは、判別結果が第2姿勢の場合、第2立体画像を表示モニタ18に表示させる(図11(b)参照)。
【0060】
例えば、図10の第1姿勢の場合を例にすると、図10(d)に示す通り、第1立体視メガネ50を装着したユーザは、左目用レンズ51にて垂直偏光により、第2画像Bのうち偶数ラインの画像(B1からBN)を見ることができる。
【0061】
また、ユーザは、右目用レンズ51にて、水平偏光により、第1画像Aのうち奇数ラインの画像(A1からAN)を見ることができる。これにより、ユーザは、図10(c)に示す通り、3D画像として被写体(立体像)を認識することができる。なお、図10(d)では、説明をわかりやすくするため、第2画像Bが垂直偏光であることを示すマークを左目用レンズ51に描いている。また、第1画像Aが水平偏光であることを示すマークを右目用レンズ52に描いている。
【0062】
また、同様にして、図11の第2姿勢の場合を例にすると、図11(d)に示す通り、第1立体視メガネ50を装着したユーザは、左目用レンズ51にて垂直偏光により、第3画像Cのうち偶数ラインの画像(C1からCN)を見ることができる。また、ユーザは、右目用レンズ52にて、水平偏光により、第1画像Aのうち奇数ラインの画像(A1からAN)を見ることができる。これにより、ユーザは、図11(c)に示す通り、3D画像として被写体(立体像)を認識することができる。なお、図11(d)では、説明をわかりやすくするため、第3画像Cが垂直偏光であることを示すマークを左目用レンズ51に描いている。また、第1画像Aが水平偏光であることを示すマークを右目用レンズ52に描いている。
【0063】
ステップS206:CPU22の姿勢情報取得部22dは、姿勢情報の変更の有無を判定する。具体的には、姿勢情報取得部22dは、第1立体視メガネ50の通信部55から送信されてくる判定結果を示す姿勢情報を監視しており、姿勢情報に変更が有った場合(ステップS206:Yes)、CPU22は、ステップS207の処理に移行する。一方、姿勢情報に変更が無かった場合(ステップS206:No)、CPU22は、ステップS208の処理に移行する。
【0064】
ステップS207:表示制御部22eは、立体画像を切り替えて表示モニタ18に表示する。例えば、第1姿勢から第2姿勢に変更が生じた場合、表示制御部22eは、図10(b)に示す第1立体画像から、図11(b)に示す第2立体画像に切り替えて表示モニタ18に表示する。
【0065】
ステップS208:CPU22は、再生モード終了の指示入力の有無を判定する。再生モード終了の指示入力を受け付けない場合(ステップS208:No)、CPU22は、ステップS206の処理に戻る。再生モード終了の指示入力を受け付けた場合(ステップS208:Yes)、CPU22は、図9に示すフローの処理を終了させる。なお、記録処理部22bは、ユーザの指示入力に応じて、生成した第1立体画像と第2立体画像を記録媒体30に記録しても良い。
【0066】
以上より、第1実施形態の電子カメラ1によれば、第1姿勢と第2姿勢とに対応した立体画像の元になる画像を取得することができる。また、第1実施形態の第1立体視メガネ50によれば、第1姿勢と第2姿勢とに応じて、ユーザに被写体を立体視させることができる。従って、第1実施形態のカメラシステム100によれば、ユーザの見る姿勢に応じて立体視が容易となる手段を提供できる。
【0067】
(第1変形例)
次に、第1変形例について説明する。第1変形例では、姿勢情報取得部22dは、第1姿勢と第2姿勢との何れかを示す姿勢情報を顔認識部22fから取得する。具体的には、顔認識部22fは、立体画像を見るユーザの顔認識をするため、第4撮像素子11dが出力する画像から人物の顔を認識する。例えば、顔認識部22fは、第4画像を解析して人物の顔を抽出し、顔を主要被写体として認識する。具体的には、顔認識部22fは、第4画像の画像信号の輝度分布に基づいて、肌色領域を顔の領域として抽出する。顔認識部22fは、顔を検出した場合、さらに顔の特徴部位を検出する。すなわち、顔認識部22fは、例えば、特開2001−16573号公報等に記載された特徴点抽出処理によって、目、鼻、耳、唇等の顔の特徴部位を第4画像から検出する。そして、顔認識部22fは、特徴部位の位置関係に基づいて、顔が第1姿勢と第2姿勢との何れかであるかを認識する。これにより、姿勢情報取得部22dは、姿勢情報を顔認識部22fから取得することができる。
【0068】
なお、第1変形例では、一例として、いわゆるパララックスバリア方式によりユーザが裸眼で表示モニタ18を見る場合について説明する。この場合、表示制御部22eは、表示モニタ18の液晶表示媒体に対して電圧を制御することにより、例えば、複数の縦一列のスリット(遮光バリア)を所定の間隔毎に形成する。これにより、ユーザは、例えば、表示モニタ18に表示された第1立体画像に対して、第1画像のみが右目で見ることができ、第2画像のみを左目で見ることができる。その結果、ユーザは、第1立体画像に基づいて立体像を見ることができる。
【0069】
従って、表示制御部22eは、ユーザが第1姿勢の場合には、表示モニタ18に第1立体画像を表示し、ユーザが第2姿勢の場合には、表示モニタ18に第2立体画像を表示する。
【0070】
以上より、第1変形例によれば、顔認識部22fにより認識された第1姿勢と第2姿勢とに応じて、ユーザに被写体を立体視させることができる。
【0071】
(第2変形例)
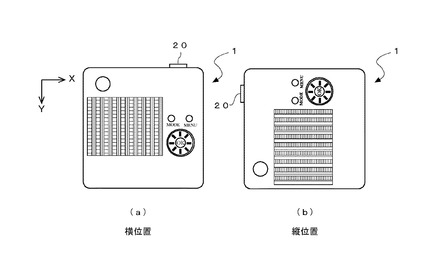
次に、第2変形例について説明する。図12は、第2変形例を説明する図である。第2変形例では、姿勢情報取得部22dは、第1姿勢と第2姿勢との何れかを示す姿勢情報を姿勢センサ21から取得する。なお、この場合、第2変形例では、レリーズ釦20が紙面上下(Y)方向にある場合を横位置(第1姿勢に対応)とし(図12(a))、レリーズ釦20が紙面左右(X)方向にある場合を縦位置(第2姿勢に対応)とする(図12(b))。
【0072】
姿勢センサ21は、電子カメラ1が図12(a)に示す横位置の状態にあるか、図12(b)に示す縦位置の状態にあるかを検出する。具体的には、姿勢センサ21は、上記の姿勢センサ54と同様の静電容量型の加速度センサであって、3次元方向の加速度を計測する。すなわち、姿勢センサ21は、検出した各軸方向における検出値を、CPU22の姿勢情報取得部22dに送信する。姿勢情報取得部22dは、検出値に基づいて、電子カメラ1が横位置か縦位置かの何れかを算出する。なお、説明の便宜上、電子カメラ1本体の姿勢は、電源オンの後、横位置の状態にあることにする。この状態を基準とし、姿勢情報取得部22dは、電子カメラ1本体が時計回り(又は反時計回り)に略90度回転して、縦位置の状態になるか否かを判定する。また、姿勢情報取得部22dは、電子カメラ1本体が時計回り(又は反時計回り)に略90度回転して、横位置の状態になるか否かを判定する。これにより、姿勢情報取得部22dは、姿勢センサ21の検出値に応じて、電子カメラ1が横位置か縦位置かの何れかであるかの姿勢情報を取得できる。なお、第2変形例では、第1変形例と同様にして、パララックスバリア方式によりユーザが裸眼で表示モニタ18を見ることとする。
【0073】
従って、表示制御部22eは、電子カメラ1本体が第1姿勢の場合には、表示モニタ18に第1立体画像を表示し、電子カメラ1本体が第2姿勢の場合には、表示モニタ18に第2立体画像を表示する。
【0074】
以上より、第2変形例によれば、姿勢センサ21により検出された第1姿勢と第2姿勢とに応じて、ユーザに被写体を立体視させることができる。
【0075】
(第3変形例)
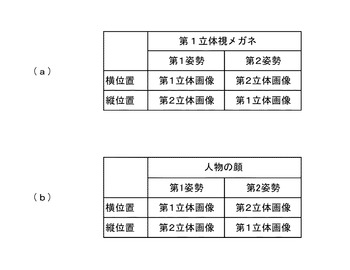
次に、第3変形例について説明する。図13は、第3変形例を説明する図である。第3変形例では、表示制御部22eは、電子カメラ1本体の姿勢と、ユーザの姿勢とに応じて、表示モニタ18に第1立体画像又は第2立体画像を表示する。なお、第3変形例では、ユーザの姿勢として、第1立体視メガネ50の装着の有無を場合分けして説明する。
【0076】
図13(a)は、電子カメラ1本体の姿勢(縦位置と横位置との何れか一方)と、第1立体視メガネ50の姿勢センサ54が検出する第1姿勢と第2姿勢との何れか一方との組み合わせの場合について例示している。
【0077】
一方、図13(b)は、電子カメラ1本体の姿勢(縦位置と横位置との何れか一方)と、顔認識部22fが認識する第1姿勢と第2姿勢との何れか一方との組み合わせの場合について例示している。図13(b)の場合は、第1変形例と同様、ユーザは裸眼で立体視することとする。
【0078】
従って、表示制御部22eは、図13に示す組み合わせに基づいて、表示モニタ18に第1立体画像又は第2立体画像を切り替え自在に表示することができる。
【0079】
以上より、第3変形例によれば、電子カメラ1本体の姿勢と第1立体視メガネ50の姿勢、又は、電子カメラ1本体の姿勢とユーザの顔の姿勢とを考慮して、より正確にユーザに被写体を立体視させることができる。
【0080】
(第4変形例)
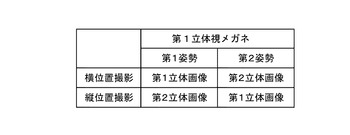
次に、第4変形例について説明する。第4変形例では、撮影画像を横長に撮影した横位置撮影(図12(a)の状態で撮影)と撮影画像を縦長に撮影した縦位置撮影(図12(b)の状態で撮影)との何れかで撮影された撮影情報を第1姿勢情報及び第2姿勢情報に追加する。具体的には、図6に示すステップS102のフローの処理において、姿勢情報作成部22aは、上記の撮影情報を追加した第1姿勢情報及び第2姿勢情報を作成する。そして、図6に示すステップS103のフローの処理において、記録処理部22bは、撮影情報を追加した第1姿勢情報、第2姿勢情報を画像ファイルのメーカノートの領域に書き込む。
【0081】
そして、表示制御部22eは、立体画像の再生の際、第1立体画像と第2立体画像との何れかを、縦長と横長との何れかの表示態様で表示部に切り替え自在に表示させる。
【0082】
図14は、第4変形例を説明する図である。例えば、第1立体視メガネ50が第1姿勢の場合、表示制御部22eは、横位置撮影であれば、第1立体画像を表示モニタ18に表示させる。また、表示制御部22eは、縦位置撮影であれば、第2立体画像を表示モニタ18に表示させる。この場合、表示制御部22eは、表示モニタ18上で、縦長撮影された画像を縦長の向きで表示させる。なお、図14では、第1立体視メガネ50の姿勢と横・縦位置撮影の組み合わせを例示しているが、ユーザの顔の姿勢と横・縦位置撮影の組み合わせの場合も、図14と同様になる。
【0083】
以上より、第4変形例によれば、第1立体視メガネ50の姿勢と横・縦位置撮影の組み合わせ、又は、ユーザの顔の姿勢と横・縦位置撮影の組み合わせを考慮して、ユーザに被写体を立体視させることができる。
【0084】
(第5変形例)
次に第5変形例について説明する。第1実施形態では、静止画撮影された画像を対象にしたが、第5変形例では、動画撮影された画像を対象にして説明をする。この場合、動画を立体視するため、液晶シャッタを搭載した第2立体視メガネを用いることとする。
【0085】
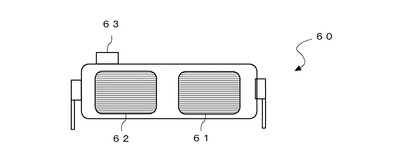
図15は、第2立体視メガネ60の正面図である。第2立体視メガネ60は、一例として、動画用の液晶シャッタ(アクティブシャッタ)方式のメガネである。第2立体視メガネ60は、左目用レンズ61に第1液晶シャッタ61aを備え、右目用レンズ62に第2液晶シャッタ62aを備える。また、第2立体視メガネ60の上面には、第1液晶シャッタ61a及び第2液晶シャッタ62aを除く電気系統の装置63を備える。
【0086】
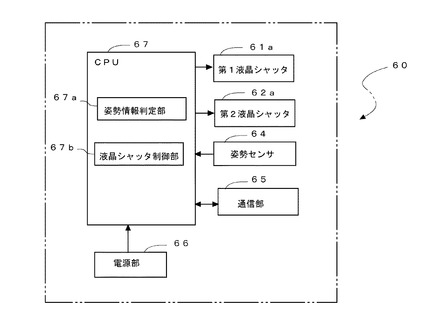
図16は、第2立体視メガネ60の構成例を示すブロック図である。第2立体視メガネ60は、第1液晶シャッタ61aと、第2液晶シャッタ62aと、電気系統の装置63として、姿勢センサ64、通信部65、電源部66及びCPU67を備える。
【0087】
姿勢センサ64は、上記の姿勢センサ54と同様の静電容量型の加速度センサであって、第2立体視メガネ60の姿勢を検出する。通信部65は、電子カメラ1に姿勢情報のデータの送信をするための通信インターフェースを提供する。また、通信部65は、電子カメラ1側からの動画再生に伴う同期信号を受信する。
【0088】
電源部66は、CPU67等各部に電力を供給する。CPU67は、各種演算及び第2立体視メガネ60の統括的な制御を行なうマイクロプロセッサである。CPU67は、姿勢情報判定部67aと、液晶シャッタ制御部67bしても機能する。
【0089】
姿勢情報判定部67aは、姿勢センサ64の検出結果に基づいて、第1姿勢と第2姿勢との何れかを判定する。通信部65は、電子カメラ1に判定結果を示す姿勢情報を送信する。なお、姿勢センサ64は、電源オンの後、継続的に第2立体視メガネ60の姿勢を検出し続ける
液晶シャッタ制御部67bは、通信部65が受信した同期信号に基づいて、電気的な操作により、第1液晶シャッタ61aと第2液晶シャッタ62aとに対して、交互にオンとオフとを切り替える。
【0090】
次に、電子カメラ1の動画記録処理について説明する。以下の動作例では、図6に示すフローの処理を流用して説明する。操作部19は、撮影モードとして動画記録用の「3D撮影モード」の指示入力を受け付けると、CPU22は、図6に示すフローの処理を開始する。表示モニタ18は、例えば、第1撮像素子11aが出力するスルー画像を表示する。
【0091】
ステップS101:CPU22は、操作部19が動画記録の指示入力を受け付けることにより、撮影処理(動画記録処理)を行なう。具体的には、CPU22は、動画記録の指示入力に同期して、立体画像の元になる本画像(第1画像、第2画像、第3画像)を各々撮像させる指示をタイミングジェネレータ(不図示)を介して出す。第1撮像素子11a、第2撮像素子11b及び第3撮像素子11cは、立体画像の元になる本画像を各々出力する。信号処理部12は、第1撮像素子11a、第2撮像素子11b及び第3撮像素子11cが出力するアナログの画像信号をデジタル信号に変換しバス23に各々出力する。信号処理部12が出力するデジタル信号は、バス23を介して画像データとして例えばRAM13のデータの保存領域に、第1画像、第2画像、第3画像のサイクルで順次、動画像ファイルとして一時記録されて行く。
【0092】
ステップS102:CPU22の姿勢情報作成部22aは、第1姿勢情報及び第2姿勢情報を作成する。具体的には、姿勢情報作成部22aは、第1画像と第2画像に基づいて、第1姿勢情報を作成する。また、姿勢情報作成部22aは、第2画像と第3画像に基づいて、第2姿勢情報を作成する。
【0093】
ステップS103:CPU22の記録処理部22bは、記録処理を行なう。具体的には、記録処理部22bは、動画像ファイルのヘッダ情報に第1姿勢情報と第2姿勢情報とを付加した後、記録媒体30に記録する。この記録処理により、立体画像の元になる動画像ファイルが得られる。そして、CPU22は、図6に示すフローの処理を終了させる。なお、2Dの動画像のファイルの記録方式としては、例えばAVI(Audio Video Interleave)形式を採用することが好ましい。
【0094】
次に立体画像の動画再生について説明する。以下の動作例では、図9に示すフローの処理を流用して説明する。操作部19は、再生モードとして動画再生用の「3D再生モード」の指示入力を受け付けると、CPU22は、図9に示すフローの処理を開始する。
【0095】
なお、ユーザは第2立体視メガネ60を装着しており、この第2立体視メガネ60の電源がオンになっていることとする。これにより、第2立体視メガネ60の姿勢センサ64は、継続的に第2立体視メガネ60の姿勢を検出し続ける。CPU67の姿勢情報判定部67aは、姿勢センサ64の検出結果に基づいて、ユーザが第1姿勢と第2姿勢との何れかを判定する。通信部65は、電子カメラ1に判定結果を無線(赤外線通信)にて継続的に送信する。
【0096】
ここで、図9に示すフローの処理において、ステップS201、ステップS202−1及びステップS202−2の処理については、上述した立体画像の静止画再生の処理と同様であるので説明を省略する。
【0097】
ステップS203:CPU22の立体画像生成部22cは、立体画像の生成を行なう。具体的には、立体画像生成部22cは、記録媒体30から動画像ファイルを読み出して、RAM13の作業領域に立体画像を生成する。
【0098】
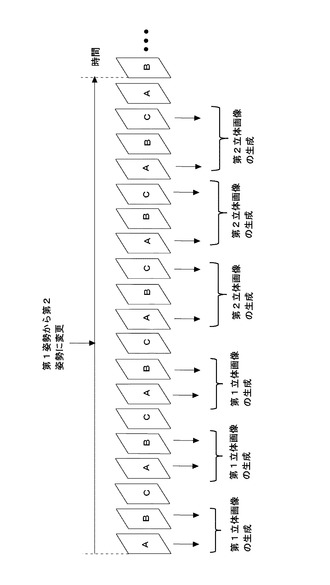
図17は、動画像による立体画像の生成処理を説明する図である。立体画像生成部22cは、図17に示す通り、第1画像A、第2画像B、第3画像Cのサイクルで動画像ファイルを読み出して、RAM13の作業領域に一時記録する。立体画像生成部22cは、動画像ファイルのヘッダファイルから第1姿勢情報及び第2姿勢情報を読み出す。立体画像生成部22cは、第1姿勢情報を読み出した場合、第1画像A、第2画像Bの組み合わせの第1立体画像を所定のフレームレート(例えば60fps)で順次生成する。また、立体画像生成部22cは、第2姿勢情報を読み出した場合、第1画像A、第3画像Cの組み合わせの第2立体画像を所定のフレームレート(例えば60fps)で順次生成する。
【0099】
ステップS204:CPU22の姿勢情報取得部22dは、現在の姿勢を示す姿勢情報を取得する。具体的には、姿勢情報取得部22dは、第2立体視メガネ60からの姿勢情報を通信部17を介して取得し、RAM13に順次上書きして記録する。
【0100】
ステップS205:CPU22の表示制御部22eは、立体画像を表示モニタ18に表示させる。具体的には、表示制御部22eは、RAM13から姿勢情報を読み出して、第1姿勢と第2姿勢との何れかを判別する。そして、表示制御部22eは、判別結果が第1姿勢の場合、第1立体画像を表示モニタ18に表示させる。一方、表示制御部22eは、判別結果が第2姿勢の場合、第2立体画像を表示モニタ18に表示させる。この表示の際、表示制御部22eは、例えば第1姿勢の場合、所定のフレームレート(例えば、60fps)で、第1画像A(左目用の画像)と第2画像B(右目用の画像)とを交互に切り替えて表示モニタ18に表示させる。また、電子カメラ1の通信部17は、動画再生に伴う同期信号を第2立体視メガネ60の通信部65に送信する。通信部65は、同期信号を受信する。液晶シャッタ制御部67bは、通信部65が受信した同期信号に基づいて、電気的な操作により、第1液晶シャッタ61aと第2液晶シャッタ62aとに対して、交互にオンとオフと切り替える。これにより、ユーザの左目には、左目用の画像が見え、ユーザの右目には、右目用の画像が見えることにより、ユーザは、3D動画像として被写体(立体像)を認識することができる。
【0101】
ステップS206:CPU22の姿勢情報取得部22dは、姿勢情報の変更の有無を判定する。姿勢情報に変更が有った場合(ステップS206:Yes)、CPU22は、ステップS207の処理に移行する。一方、姿勢情報に変更が無かった場合(ステップS206:No)、CPU22は、ステップS208の処理に移行する。
【0102】
ステップS207:表示制御部22eは、ステップS206にて例えば第1姿勢から第2姿勢に変更した判定結果であった場合、第2立体画像を表示モニタ18に表示させる。この表示の際、表示制御部22eは、第2姿勢の場合、所定のフレームレート(例えば、60fps)で、第1画像A(左目用の画像)と第3画像C(右目用の画像)とを交互に切り替えて表示モニタ18に表示させる。その後の処理はステップS205の処理と同様であって、液晶シャッタ制御部67bは、通信部65が受信した同期信号に基づいて、電気的な操作により、第1液晶シャッタ61aと第2液晶シャッタ62aとに対して、交互にオンとオフと切り替える。これにより、ユーザの左目には、左目用の画像が見え、ユーザの右目には、右目用の画像が見えることにより、ユーザは、3D動画像として被写体(立体像)を認識することができる。
【0103】
ステップS208:CPU22は、再生モード終了の指示入力の有無を判定する。再生モード終了の指示入力を受け付けない場合(ステップS208:No)、CPU22は、ステップS206の処理に戻る。再生モード終了の指示入力を受け付けた場合(ステップS208:Yes)、CPU22は、図9に示すフローの処理を終了させる。
【0104】
以上より、第5変形例によれば、3Dの動画再生の場合であっても、ユーザに被写体を立体視させることができる。
【0105】
(第2実施形態)
次に、第2実施形態について説明する。第2実施形態では、本発明のカメラシステムの一実施形態について説明する。第2実施形態では、3台の電子カメラを電気的に接続すると共に、3つの撮影光学系を第1実施形態と同様に立体画像が撮影できる配置にすることを特徴とする。
【0106】
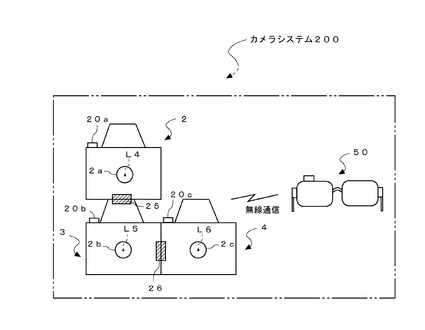
図18は、カメラシステム200の構成例を示す図である。カメラシステム200は、3台の電子カメラ2、3、4と、第1立体視メガネ50とを備える。なお、電子カメラ2、3、4は、同一の構成とする。
【0107】
図18では、電子カメラ2、3、4の筐体の正面図と、第1立体視メガネ50との正面図を表している。電子カメラ2の撮影光学系2aの光軸L4と電子カメラ3の撮影光学系2bの光軸L5とは、第1実施形態と同様、両眼視差の距離(瞳孔間距離の平均値)だけ離れており、電子カメラ3の撮影光学系2bの光軸L5と電子カメラ4の撮影光学系2cの光軸L6とは、第1実施形態と同様、両眼視差の距離(瞳孔間距離の平均値)だけ離れている。この配置により、電子カメラ2、3、4は、第1実施形態の電子カメラ1と同様、例えば静止画撮影の場合、撮影光学系2bと撮影光学系2cとから第1姿勢での立体視用の第1立体画像の元になる一対の画像を取得すると共に、撮影光学系2aと撮影光学系2bとから第2姿勢での立体視用の第2立体画像の元になる一対の画像を取得することができる。また、電子カメラ2、3、4の筐体の上面には、第1レリーズ釦20a、第2レリーズ釦20b、第3レリーズ釦20cが各々設けられている。また、電子カメラ2、3、4は、第1接続アダプタ25、第2接続アダプタ26を介して互いに電気的に接続されている。なお、図18に示すカメラシステム200では、第1立体視メガネ50を一例として採用しているが、第2立体視メガネ60であっても良い。
【0108】
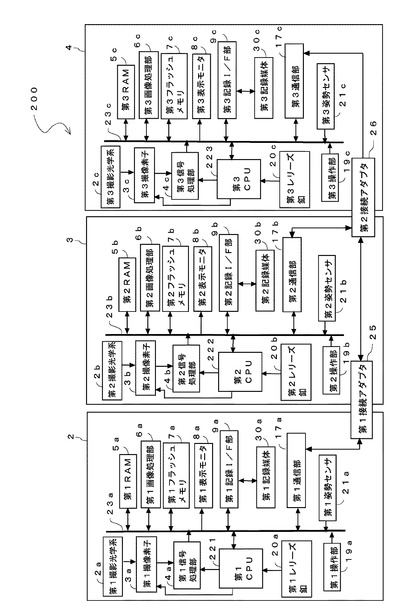
図19は、電子カメラ2、3、4の構成例を示すブロック図である。なお、電子カメラ2、3、4は、同一の構成であるので、電子カメラ2を代表して説明する。
【0109】
電子カメラ2は、第1撮影光学系2aと、第1撮像素子3aと、第1信号処理部4aと、第1RAM5aと、第1画像処理部6aと、第1フラッシュメモリ7aと、第1表示モニタ8aと、第1記録I/F部9aと、第1通信部17aと、第1操作部19aと、第1レリーズ釦20aと、第1姿勢センサ21、第1CPU221と、バス23aとを備える。なお、
このうち、第1信号処理部4a、第1RAM5a、第1画像処理部6a、第1フラッシュメモリ7a、第1表示モニタ8a、記録I/F部9a、第1通信部17a、第1操作部19a、第1姿勢センサ21及び第1CPU221は、バス23aを介して互いに接続されている。また、上述した通り、電子カメラ2、3、4は、第1接続アダプタ25、第2接続アダプタ26を介して、互いに接続されている。
【0110】
なお、各ブロックの機能については、第1実施形態の電子カメラ1の第1撮影光学系10a、第1撮像素子11a、信号処理部12、RAM13、画像処理部14、フラッシュメモリ15、記録I/F部16と、通信部17、表示モニタ18、操作部19と、レリーズ釦20と、姿勢センサ21と、CPU22と同様であるので説明を省略する。また、第1CPU221は、電子カメラ1のCPU22の姿勢情報作成部22a、記録処理部22b、立体画像生成部22c、姿勢情報取得部22d、表示制御部22e、顔認識部22fと同様の機能を有する。
【0111】
次に、カメラシステム200における動作の一例について説明をする。先ず、カメラシステム200での3D撮影モード時における撮影動作の一例を説明する。以下の動作例では、図6に示すフローの処理を流用して説明する。先ず、電子カメラ2の操作部19aは、電子カメラ2、3、4の電源オンの後、撮影モードとして静止画用の「3D撮影モード」が指示入力を受け付けると、CPU22は、図6に示すフローの処理を開始する。
【0112】
ステップS101:CPU22は、第1レリーズ釦20aによる全押し操作の指示入力を受け付けることにより撮影処理を行なう。具体的には、第1CPU221が第1レリーズ釦20aによる全押し操作の指示入力を受け付けた場合、第1CPU221は、第2CPU222及び第3CPU223に指示を出す。続いて、第1CPU221、第2CPU222及び第3CPU223は、第1レリーズ釦20aの全押し操作の指示入力と同期して、各々静止画撮影の処理を行なう。例えば、電子カメラ2では、第1画像が第1RAM5aに一時記録される。また、電子カメラ3では、第2画像が第2RAM5bに一時記録される。また、電子カメラ4では、第3画像が第3RAM5cに一時記録される。
【0113】
ステップS102:CPU221(姿勢情報作成部)は、第1姿勢情報及び第2姿勢情報を作成する。具体的には、CPU221(姿勢情報作成部)は、第2画像と第3画像に基づいて、第1姿勢情報を作成する。CPU221(姿勢情報作成部)は、第1画像と第2画像に基づいて、第2姿勢情報を作成する。
【0114】
ステップS103:CPU221(記録処理部)は、記録処理を行なう。具体的には、CPU221は、第2通信部17bを介して、第2RAM5bから第2画像(画像データ)を第1通信部17aで受信する。そして、CPU221(記録処理部)は、第2画像を第1RAM5aに一時記録する。また、CPU221は、第3通信部17cを介して、第3RAM5cから第3画像(画像データ)を第1通信部17aで受信する。そして、CPU221(記録処理部)は、第3画像を第1RAM5aに一時記録する。
【0115】
続いて、CPU221(記録処理部)は、第1実施形態の場合と同様にして、図8に示す画像ファイルを生成した後、第1記録媒体30aに記録する。この記録処理により、立体画像の元になる画像ファイルが得られる。そして、CPU221は、図6に示すフローの処理を終了させる。なお、立体画像の再生については、第1実施形態の場合と同様であるので説明を省略する。
【0116】
以上より、第2実施形態の電子カメラ2、3、4によれば、第1姿勢と第2姿勢とに対応した立体画像の元になる画像を取得することができる。また、第2実施形態の第1立体視メガネ50によれば、第1姿勢と第2姿勢とに応じて、ユーザに被写体を立体視させることができる。従って、第2実施形態のカメラシステム200によれば、ユーザの見る姿勢に応じて立体視が容易となる手段を提供できる。
【0117】
(第3実施形態)
次に、第3実施形態について説明する。第3実施形態では、本発明の表示システムの一実施形態について説明する。
【0118】
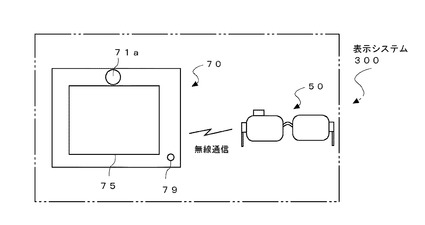
図20は、表示システム300の構成例を示す図である。表示システム300は、表示装置70と、第1立体視メガネ50とを備える。
【0119】
図20では、表示装置70の筐体の正面図と、第1立体視メガネ50との正面図を表している。表示装置70の正面には、撮影光学系71の撮影レンズ、表示モニタ75、電源釦79が設けられている。表示装置70と第1立体視メガネ50とは、例えば赤外線通信により姿勢情報等のデータの送受信がなされる。表示システム300では、表示装置70が、例えば、第1実施形態の電子カメラ1で記録された第1姿勢と第2姿勢とに対応した立体画像の元になる画像ファイルを読み込んで、立体画像を再生する。
【0120】
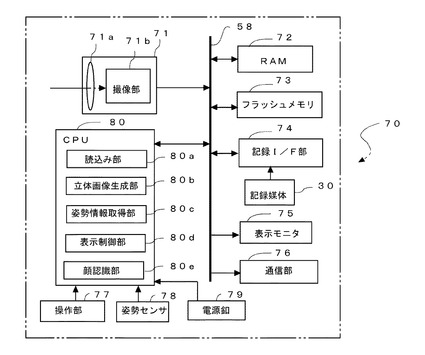
図21は、表示装置70の構成例を示すブロック図である。ここで、表示装置70は、2次元の2D画像を再生するための「2D再生モード」と、立体画像を再生するための「3D再生モード」を有している。
【0121】
表示装置70は、カメラ部71と、RAM72と、フラッシュメモリ73と、記録I/F部74と、表示モニタ75と、通信部76と、操作部77と、姿勢センサ78と、電源釦79と、CPU80と、バス81とを備える。
【0122】
カメラ部71は、撮影光学系71aと、撮像部71bとを備える。なお、本実施形態の表示装置70では、カメラ部71は内蔵されているが、外付けでも良い。外付けの場合、カメラ部71は、例えばUSB(Universal Serial Bus)接続を介して、バス81と電気的に接続する。
【0123】
RAM72は、揮発性の半導体メモリである。フラッシュメモリ73は、書き換え可能な不揮発性の半導体メモリである。記録I/F部74は、コネクタ(不図示)に接続された着脱自在の記録媒体30にアクセスする。表示モニタ75は、例えば液晶表示媒体により構成される。そして、表示モニタ75は、2次元の2D画像、立体画像(3D画像)、表示装置70の操作メニューを表示する。通信部76は、第1立体視メガネ50等の立体視メガネの姿勢情報を例えば赤外線通信で実現するための通信インターフェースを提供する。
【0124】
操作部77は、表示モニタ75の表面に配置された透明のタッチパネルである。操作部77は、タッチパネル表面に接触した指先等の位置を検出して撮影者からの操作を受け付ける。また、操作部77は、カメラ部71のレリーズ釦の機能を有する。
【0125】
姿勢センサ78は、上記の姿勢センサ21、54、64と同様の静電容量型の加速度センサであって、表示装置70本体の姿勢を検出する。電源釦79は、その電源釦79のオンにより、各部に電力を供給する。
【0126】
CPU80は、表示装置70の制御を行なうプロセッサである。CPU80は、フラッシュメモリ74に予め格納されたシーケンスプログラムを実行することにより、表示装置70の各部の制御等を行なう。また、CPU80は、読込部80a、立体画像生成部80b、姿勢情報取得部80c、表示制御部80d、顔認識部80eとしても機能する。
【0127】
読込部80aは、第1姿勢情報と第2姿勢情報とが関連付けて記録されている、第1立体画像及び第2立体画像の元になる複数の画像を読み込む。具体的には、電子カメラ1で記録された立体画像の元になる画像ファイルを読み込む。そして、読込部80aは、読み込んだ画像ファイルをRAM72の作業領域に一時記録する。ここで、読込部80aは、例えば、記録媒体30に既に立体画像が記録されている場合、その立体画像を読み込んでも良い。
【0128】
なお、立体画像生成部80b、姿勢情報取得部80c、表示制御部80d及び顔認識部80eは、第1実施形態の立体画像生成部22c、姿勢情報取得部22d、表示制御部22e及び顔認識部22fと各々同様の機能であるので説明を省略する。
【0129】
次に、表示システム300における立体画像の再生動作について説明する。以下の動作例では、表示装置70の電源オンの後、操作部19は、再生モードとして「3D再生モード」の指示入力を受け付けると、CPU80は、3D再生モードの処理を開始する。なお、ユーザは第1立体視メガネ50を装着しており、この第1立体視メガネ50の電源がオンになっていることとする。これにより、第1立体視メガネ50の姿勢センサ54は、継続的に第1立体視メガネ50の姿勢を検出し続ける。第1立体視メガネ50のCPU57の姿勢情報判定部57aは、姿勢センサ54の検出結果に基づいて、ユーザが第1姿勢と第2姿勢との何れかを判定する。通信部55は、表示装置70に判定結果を示す姿勢情報を無線(赤外線通信)にて継続的に送信する。その後の動作については、上述した図9のフローの処理と同様であるので、説明を省略する。
【0130】
以上より、第3実施形態の表示システムによれば、第1姿勢と第2姿勢とに応じて、ユーザに被写体を立体視させることができる。従って、第3実施形態の表示システム300によれば、ユーザの見る姿勢に応じて立体視が容易となる手段を提供できる。
【0131】
なお、表示装置70は、第1変形例と同様にして、姿勢情報取得部80cが第1姿勢と第2姿勢との何れかを示す姿勢情報を顔認識部80eから取得しても良い。これにより、表示装置70は、顔認識部80eにより認識された第1姿勢と第2姿勢とに応じて、ユーザに被写体を立体視させることができる。
【0132】
或いは、表示装置70は、第2変形例と同様にして、姿勢情報取得部80cが第1姿勢と第2姿勢との何れかを示す姿勢情報を姿勢センサ78から取得しても良い。これにより、表示装置70は、姿勢センサ78により検出された第1姿勢と第2姿勢とに応じて、ユーザに被写体を立体視させることができる。
【0133】
或いは、表示装置70は、第3変形例と同様にして、表示制御部80dが表示装置70本体の姿勢と第1立体視メガネ50の姿勢とに応じて、表示モニタ75に第1立体画像又は第2立体画像を表示しても良い。また、表示制御部80dは、表示装置70本体の姿勢とユーザの顔の姿勢とに応じて、表示モニタ75に第1立体画像又は第2立体画像を表示しても良い。これにより、表示装置70は、表示装置70本体の姿勢と第1立体視メガネ50の姿勢、又は、表示装置70本体の姿勢とユーザの顔の姿勢とを考慮して、より正確にユーザに被写体を立体視させることができる。
【0134】
或いは、表示装置70は、第4変形例と同様にして、表示制御部22eが立体画像の再生の際、第1立体画像と第2立体画像との何れかを、縦長と横長との何れかの表示態様で表示部に切り替え自在に表示させても良い。これにより、表示装置70は、第1立体視メガネ50の姿勢と横・縦位置撮影の組み合わせ、又は、ユーザの顔の姿勢と横・縦位置撮影の組み合わせを考慮して、ユーザに被写体を立体視させることができる。
【0135】
或いは、表示装置70は、第5変形例と同様にして、表示制御部22eが立体画像を動画再生しても良い。これにより、表示装置70は、3Dの動画再生の場合であっても、ユーザに被写体を立体視させることができる。
(上記実施形態の補足事項)
(1)上記実施形態では、偏光フィルタ方式の第1立体視メガネ50、アクティブシャッタ(時分割)方式の第2立体視メガネ60について説明したが、立体視メガネの方式は、上記の方式に限定されず、例えば、波長分割方式、カラーフィルタ方式等の立体視メガネを採用しても良い。
【0136】
(2)上記実施形態では、ユーザが裸眼で立体像を見る場合、パララックスバリア方式について説明したが、上記の方式に限定されず、例えばレンチキュラー方式、バックライトコントロール方式等の視差分割を採用しても良い。
【0137】
(3)上記実施形態では、2Dの静止画の画像ファイルとして、Exif形式を採用したが、上記の方式に限定されず、DCF(Design rule for Camera File system)に準拠した他の形式を採用しても良い。また、静止画の立体画像としては、一例としてマルチピクチャーフォーマットに準拠した形式であれば良く、動画の立体画像としては、一例として映像2チャンネル、ステレオ音声AVI(3D−AVI)であれば良い。
【0138】
(4)上記実施形態では、第1姿勢と第2姿勢とについて、一例として、ユーザが起立又は座っている状態で正面を向いている状態を第1姿勢とし、第1姿勢から時計回り(又は反時計回り)に略90度、横になっている状態を第2姿勢とした。ここで、第2姿勢は、略90度に限定されない。例えば、第1立体視メガネ50に、円偏光フィルタを採用して立体視できる角度を変更しても良い。具体的には、ユーザが第1姿勢の状態から時計回り(又は反時計回り)に略45度傾けた状態を第2姿勢としても良い。
【0139】
(5)上記実施形態では、電子カメラ2、3、4は同一の構成として説明した。ここで、例えば、電子カメラ2の撮影光学系2aの光軸L4と電子カメラ3の撮影光学系2bの光軸L5とが両眼視差の距離だけ離れており、電子カメラ3の撮影光学系2bの光軸L5と電子カメラ4の撮影光学系2cの光軸L6とが両眼視差の距離だけ離れている構成が保たれているのであれば、必ずしも、電子カメラ2、3、4は同一の構成としなくても良い。
【0140】
(6)上記実施形態において、表示装置70と従来(市販)の立体視カメラとを組み合わせて使用しても良い。この場合、顔認識部80eは、ユーザが従来の立体視カメラを装着した状態で顔認識をして、第1姿勢と第2姿勢との何れかを判定すれば良い。これにより、表示装置70は、従来の立体視カメラを用いても、顔認識部80eより認識された第1姿勢と第2姿勢とに応じて、ユーザに被写体を立体視させることができる。
【符号の説明】
【0141】
100、200・・・カメラシステム、300・・・表示システム、70・・・表示装置、80a・・・読込部、80b・・・立体画像生成部、80c・・・姿勢情報取得部、80d・・・表示制御部、1、2、3、4・・・電子カメラ、11a・・・第1撮像素子、11b・・・第2撮像素子、11c・・・第3撮像素子、22a・・・姿勢情報作成部、22b・・・記録処理部
【技術分野】
【0001】
本発明は、表示装置、電子カメラ、表示システム及びカメラシステムに関する。
【背景技術】
【0002】
従来、複数の撮像手段を備えた複眼用の電子カメラが提案されている(例えば、特許文献1参照)。上記の電子カメラでは、ユーザが3次元的に立体視するための右目用の画像と左目用の画像とを撮影する。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2010−103895号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上記の電子カメラで撮影された画像を立体視する場合、例えばユーザの見る姿勢によっては、立体視することが困難になるという問題がある。
【0005】
そこで、本発明は、上記事情に鑑み、例えばユーザの見る姿勢に応じて立体視が容易となる手段を提供することを目的とする。
【課題を解決するための手段】
【0006】
本発明の一態様の表示装置は、表示部と、読込部と、立体画像生成部と、姿勢情報取得部と、表示制御部とを備える。表示部は、画像を表示する。読込部は、第1姿勢での立体視用の第1立体画像を生成するための第1姿勢情報と第2姿勢での立体視用の第2立体画像を生成するための第2姿勢情報とが関連付けて記録されている、第1立体画像及び第2立体画像の元になる複数の画像を読み込む。立体画像生成部は、第1姿勢情報と第2姿勢情報とに基づいて、第1立体画像と第2立体画像とを複数の画像から各々生成する。姿勢情報取得部は、現在の姿勢を示す姿勢情報を取得する。表示制御部は、姿勢情報に基づいて第1姿勢と第2姿勢との何れかを判別し、判別結果に応じて、第1立体画像と第2立体画像との何れかを表示部に切り替え自在に表示させる。
【0007】
本発明の一態様の表示装置は、表示部と、読込部と、姿勢情報取得部と、表示制御部とを備える。表示部は、画像を表示する。読込部は、第1姿勢での立体視用の第1立体画像と、第2姿勢での立体視用の第2立体画像とを読み込む。姿勢情報取得部は、現在の姿勢を示す姿勢情報を取得する。表示制御部は、姿勢情報に基づいて第1姿勢と第2姿勢との何れかを判別し、判別結果に応じて、第1立体画像と第2立体画像との何れかを表示部に切り替え自在に表示させる。
【0008】
本発明の一態様の電子カメラは、第1撮像素子と、第2撮像素子と、第3撮像素子と、姿勢情報作成部と、記録処理部とを備える。第1撮像素子は、第1撮影光学系からの被写体光を撮像して第1画像を生成する。第2撮像素子は、第2撮影光学系からの被写体光を撮像して第2画像を生成する。第3撮像素子は、第3撮影光学系からの被写体光を撮像して第3画像を生成する。姿勢情報作成部は、第1画像と第2画像と第3画像とのうちから選択した2種類の画像に基づいて、第1姿勢での立体視用の第1立体画像を生成するための第1姿勢情報を作成すると共に、第1姿勢情報の作成の際に選択されなかった画像を含む2種類の画像に基づいて、第2姿勢での立体視用の第2立体画像を生成するための第2姿勢情報を作成する。記録処理部は、第1姿勢情報と第2姿勢情報とを各々対応する画像に関連付けてメモリに記録する。
【0009】
本発明の一態様の表示システムは、請求項1から請求項3の何れか1項に記載の表示装置と、立体視用の立体視メガネとを備える。立体視メガネは、メガネ側姿勢センサと、姿勢情報判定部と、メガネ側通信部とを有する。メガネ側姿勢センサは、立体視メガネ本体の姿勢を検出する。姿勢情報判定部は、メガネ側姿勢センサの検出結果に基づいて、第1姿勢と第2姿勢との何れかを判定する。メガネ側通信部は、姿勢情報判定部の判定結果を示す姿勢情報を表示装置に送信する。表示装置は、装置側通信部を有する。装置側通信部は、メガネ側通信部から姿勢情報を受信する。姿勢情報取得部は、装置側通信部を介して姿勢情報を取得する。
【0010】
本発明の一態様のカメラシステムは、請求項8又請求項9に記載の電子カメラと、立体視用の立体視メガネとを備える。立体視メガネは、メガネ側姿勢センサと、姿勢情報判定部と、メガネ側通信部とを有する。メガネ側姿勢センサは、立体視メガネ本体の姿勢を検出する。姿勢情報判定部は、メガネ側姿勢センサの検出結果に基づいて、第1姿勢と第2姿勢との何れかを判定する。メガネ側通信部は、姿勢情報判定部の判定結果を示す姿勢情報を表示装置に送信する。電子カメラは、カメラ側通信部を有する。カメラ側通信部は、メガネ側通信部から姿勢情報を受信する。姿勢情報取得部は、カメラ側通信部を介して姿勢情報を取得する。
【発明の効果】
【0011】
本発明は、例えばユーザの見る姿勢に応じて立体視が容易となる手段を提供できる。
【図面の簡単な説明】
【0012】
【図1】電子カメラ1の構成例を示すブロック図
【図2】電子カメラ1の筐体の正面図及び背面図
【図3】第1立体視メガネ50の正面図
【図4】第1立体視メガネ50の電気系統の装置53の構成例を示すブロック図
【図5】カメラシステム100の構成例を示す図
【図6】電子カメラ1の動作の一例を示すフローチャート
【図7】3D撮影モードにおける構図の一例を説明する図
【図8】画像ファイルの構成の一例を説明する図
【図9】電子カメラ1における立体画像の再生動作の一例を示すフローチャート
【図10】立体画像の再生処理を説明する図
【図11】立体画像の再生処理を説明する図
【図12】第2変形例を説明する図
【図13】第3変形例を説明する図
【図14】第4変形例を説明する図
【図15】第2立体視メガネ60の正面図
【図16】第2立体視メガネ60の構成例を示すブロック図
【図17】動画像による立体画像の生成処理を説明する図
【図18】カメラシステム200の構成例を示す図
【図19】電子カメラ2、3、4の構成例を示すブロック図
【図20】表示システム300の構成例を示す図
【図21】表示装置70の構成例を示すブロック図
【発明を実施するための形態】
【0013】
(第1実施形態)
以下、図面に基づいて本発明の実施の形態を詳細に説明する。第1実施形態では、本発明のカメラシステムの一実施形態について説明する。先ず、電子カメラ1の構成を説明した後、第1立体視メガネ50の構成について説明する。その後、カメラシステム100の動作の一例について説明する。
【0014】
図1は、電子カメラ1の構成例を示すブロック図である。ここで、電子カメラ1は、立体画像を撮影するための「3D撮影モード」を有している。3D撮影モードでは、両眼視差を利用して右目用の画像と左目用の画像(動画像も含む)を撮影する撮影モードである。立体画像には、後述する第1立体画像や第2立体画像を含む。本実施形態の3D撮影モードでは、例えばユーザの見る姿勢に応じて立体視が容易となる画像を取得する。
【0015】
電子カメラ1は、第1撮影光学系10aと、第2撮影光学系10bと、第3撮影光学系10cと、第4撮影光学系10dと、第1撮像素子11aと、第2撮像素子11bと、第3撮像素子11cと、第4撮像素子11dと、信号処理部12と、RAM(Random Access Memory)13と、画像処理部14と、フラッシュメモリ15と、記録インターフェース部(以下「記録I/F部」という)16と、通信部17と、表示モニタ18と、操作部19と、レリーズ釦20と、姿勢センサ21と、CPU(Central Processing Unit)22と、バス23とを備える。
【0016】
このうち、信号処理部12、RAM13、画像処理部14、フラッシュメモリ15、記録I/F部16、通信部17、表示モニタ18及びCPU22は、バス23を介して互いに接続されている。また、第1撮像素子11a、第2撮像素子11b、第3撮像素子11c、第4撮像素子11d、信号処理部12、操作部19、レリーズ釦20及び姿勢センサ21は、CPU22に接続されている。
【0017】
第1撮影光学系10aは、焦点距離を調整するズームレンズと、撮像素子11aの撮像面での結像位置を調整するフォーカスレンズとを含む複数のレンズ群で構成されている。レンズ駆動部(不図示)は、第1撮影光学系10a内でズームレンズやフォーカスレンズのレンズ位置をCPU22の指示に応じて光軸方向に調整する。なお、簡単のため、図1では、第1撮影光学系10a、第2撮影光学系10b、第3撮影光学系10c及び第4撮影光学系10dを1枚のレンズとして図示する。
【0018】
第1撮像素子11aは、単位時間当たりの光量を調節する絞り(不図示)を通過した被写体光を撮像し、アナログの画像信号を生成する。そして、第1撮像素子11aが出力するアナログの画像信号は、信号処理部12に入力される。なお、第1撮像素子11aの撮像面には、R(赤)、G(緑)B(青)の3種類のカラーフィルタが例えばベイヤー配列で配置されている。また、第1撮像素子11aの電荷蓄積時間及び画像信号の読み出しは、タイミングジェネレータ(不図示)によって制御される。第1撮像素子11aは、CCD(Charge Coupled Device)型又はCMOS(Complementary Metal−Oxide Semiconductor)型のカラーイメージセンサである。
【0019】
なお、第2撮影光学系10b、第3撮影光学系10c及び第4撮影光学系10dについては、第1撮影光学系10aと同様の構成であるので説明を省略する。また、第2撮像素子11b、第3撮像素子11c、第4撮像素子11dについても、第1撮影素子11aと同様の構成であるので説明を省略する。
【0020】
また、本実施形態では、説明の便宜上、第1撮像素子11aが出力する画像を第1画像とし、第2撮像素子11bが出力する画像を第2画像とする。また、本実施形態では、第3撮像素子11cが出力する画像を第3画像とし、第4撮像素子11dが出力する画像を第4画像とする。この第4画像は、第1画像よりも解像度の低いスルー画像であって、立体画像生成用の画像ではなく、表示モニタ18に表示された立体画像を見るユーザの顔を認識するために用いられる。
【0021】
ここで、通常の撮影モードで2次元の記録用画像(本画像)を撮影する場合、第1撮像素子11aは、レリーズ釦20の全押し操作に応答して本画像(第1画像)を撮像する。また、3D撮影モードでは、第1撮像素子11a、第2撮像素子11b及び第3撮像素子11cは、レリーズ釦20の全押し操作に同期して、立体画像の元になる本画像(第1画像、第2画像、第3画像)を各々撮像する。
【0022】
信号処理部12は、通常の撮影モードの場合、第1撮像素子11aが出力するアナログの画像信号をデジタル信号(画像データ)に変換しバス23に出力する。また、信号処理部12は、3D撮影モードでは、第1撮像素子11a、第2撮像素子11b及び第3撮像素子11cが出力するアナログの画像信号をデジタル信号(画像データ)に変換しバス23に各々出力する。また、信号処理部12は、顔認識部22fが顔認識処理を行なう場合、第4撮像素子11dが出力するアナログの画像信号をデジタル信号(画像データ)に変換しバス23に出力する。
【0023】
RAM13は、揮発性のメモリであり、信号処理部12が出力する画像データは、バス23を介して画像データとしてRAM13に一時記録される。画像処理部14は、RAM13に記録されている画像データを読み出し、各種の画像処理(階調変換処理、輪郭強調処理、ホワイトバランス処理等)を施す。
【0024】
フラッシュメモリ15は、書き換え可能な不揮発性の半導体メモリである。フラッシュメモリ15には、電子カメラ1の制御を行なうプログラム等が予め記録されている。CPU22は、このプログラムに従い、一例として後述の図6及び図9に示すフローの処理を実行する。
【0025】
記録I/F部16には、着脱自在の記録媒体30を接続するためのコネクタ(不図示)が形成されている。そして、記録I/F部16は、そのコネクタに接続された記録媒体30にアクセスして本画像の記録処理等を行なう。この記録媒体30は、例えば、カード型の不揮発性のメモリカードである。図1では、コネクタに接続された後の記録媒体30を示している。
【0026】
通信部17は、第1立体視メガネ50の姿勢情報の受信を実現するための通信インターフェースを提供する。例えば、通信部17は、赤外線通信を行なう通信インターフェースを提供する。これにより、通信部17は、第1立体視メガネ50側から姿勢情報を受信する。
【0027】
表示モニタ18は、例えば液晶表示媒体により構成される。そして、表示モニタ17は、2次元の2D画像、立体画像(3D画像)、電子カメラ1の操作メニュー等を表示する。操作部19は、撮影者の操作を受け付ける複数の釦を有しており、電子カメラ1を操作するための指示入力を受け付ける。レリーズ釦20は、半押し操作(撮影前におけるオートフォーカス(AF)や自動露出(AE)等の動作開始の指示入力)と全押し操作(記録媒体30に記録する本画像を取得するための撮像動作開始)との指示入力とを受け付ける。姿勢センサ21は、電子カメラ本体の姿勢を検出する。なお、姿勢センサ21の詳細については、第2変形例で説明する。
【0028】
CPU22は、各種演算及び電子カメラ1の統括的な制御を行なうマイクロプロセッサである。CPU22は、上記のプログラムを実行することにより、電子カメラ1の各部の制御等を行なう。CPU22は、姿勢情報作成部22a、記録処理部22b、立体画像生成部22c、姿勢情報取得部22d、表示制御部22e、顔認識部22fとしても機能する。
【0029】
姿勢情報作成部22aは、第1画像と第2画像と第3画像とのうちから選択した2種類の画像に基づいて、第1姿勢での立体視用の第1立体画像を生成するための第1姿勢情報を作成する。また、姿勢情報作成部22aは、第1姿勢情報の作成の際に選択されなかった画像を含む2種類の画像に基づいて、第2姿勢での立体視用の第2立体画像を生成するための第2姿勢情報を作成する。ここで、本実施形態では、一例として、ユーザが起立又は座っている状態で正面を向いている状態を第1姿勢とし、第1姿勢から時計回り(又は反時計回り)に略90度、横になっている状態を第2姿勢とする。
【0030】
記録処理部22bは、第1姿勢情報と第2姿勢情報とを各々対応する画像に関連付けた画像ファイルとして、RAM13、フラッシュメモリ15又は記録媒体30に記録する。立体画像生成部22cは、第1姿勢情報と第2姿勢情報とに基づいて、第1立体画像と第2立体画像とを複数の画像から各々生成する(詳細は後述する)。姿勢情報取得部22dは、現在の姿勢を示す姿勢情報を取得する。例えば、姿勢情報取得部22dは、第1立体視メガネ50からの姿勢情報を通信部17を介して取得し、RAM13に一時記録する。
【0031】
表示制御部22eは、姿勢情報取得部22dが取得した姿勢情報に基づいて第1姿勢と第2姿勢との何れかを判別し、判別結果に応じて、第1立体画像と第2立体画像との何れかを表示モニタ18に切り替え自在に表示させる。顔認識部22fは、第4撮像素子11dが出力する画像から人物の顔を認識する。なお、顔認識部22fの詳細については、第1変形例で説明する。
【0032】
次に各撮影光学系の配置について説明する。図2は、電子カメラ1の筐体の正面図及び背面図である。図2(a)は、電子カメラ1の筐体の正面図である。電子カメラ1の筐体の正面には、同一の被写体を複数の視点から撮影するため、撮影光学系10a、10b、10cの撮影レンズが設けられている。撮影光学系10aの光軸L1と撮影光学系10bの光軸L2とは、両眼視差の距離(例えば、人間の瞳孔間距離の平均値(65mm))だけ離れており、撮影光学系10bの光軸L2と撮影光学系10cの光軸L3とは、両眼視差の距離(例えば、65mm)だけ離れている。この配置により、電子カメラ1は、撮影光学系10aと撮影光学系10bとから第1姿勢での立体視用の第1立体画像の元になる一対の画像を取得すると共に、撮影光学系10bと撮影光学系10cとから第2姿勢での立体視用の第2立体画像の元になる一対の画像を取得することができる。また、電子カメラ1の筐体の上面には、レリーズ釦20と電源釦24が設けられている。
【0033】
図2(b)は、電子カメラ1の筐体の背面図である。電子カメラ1の筐体の背面には、撮影光学系10dの撮影レンズ、表示モニタ18、モード選択釦19a、メニュー釦19b及び選択・決定釦19cが設けられている。なお、撮影光学系10dの撮影レンズが、電子カメラ1の筐体の背面に設けられているのは、ユーザが立体画像を表示モニタ18で見る際、必要に応じて顔認識部22fがユーザの顔認識をするためである。
【0034】
また、本実施形態の操作部19は、モード選択釦19aと、メニュー釦19bと、選択・決定釦19cと、電源釦24とを含む。モード選択釦19aは、撮影モード若しくは再生モードに切り替える操作をユーザから受け付ける。メニュー釦19bは、メニュー画面を立ち上げるための操作をユーザから受け付ける。選択・決定釦19cは、電子カメラ1の操作メニューにおける設定条件等の項目選択又は項目決定をユーザから受け付ける。ここで、選択・決定釦19cは、決定釦19dとダイヤル19eとを有する。ダイヤル19eの全体形状は、環状であって、ダイヤル19eの内周側には決定釦19dが配置されている。そして、ダイヤル19eは、例えばメニュー画面等での項目選択の入力をユーザから受け付ける。また、決定釦19dは、メニュー画面等での項目決定の入力をユーザから受け付ける。例えば、3D撮影モードを開始する操作が決定釦19dに割り当てられている。
【0035】
次に、立体視メガネの構成について、説明する。図3は、第1立体視メガネ50の正面図である。図3に示す第1立体視メガネ50は、一例として、静止画用の偏光フィルタ方式のメガネ(偏光フィルタメガネ)である。第1立体視メガネ50は、左目用レンズ51の表面に第1フィルタ(垂直偏光)が設け、右目用レンズ52の表面に第2フィルタ(水平偏光)を配置している。これにより、ユーザの左目には、垂直偏光の画像(左目用の画像)が見え、ユーザの右目には、水平偏光の画像(右目用の画像)が見えることにより、ユーザは、3D画像として被写体(立体像)を認識することができる。また、第1立体視メガネ50の上面には、電気系統の装置53を備える。
【0036】
図4は、第1立体視メガネ50の電気系統の装置53の構成例を示すブロック図である。電気系統の装置53は、姿勢センサ54、通信部55、電源部56及びCPU57を備える。姿勢センサ54は、第1立体視メガネ50の姿勢を検出する。ここで、姿勢センサ54は、後述する図10(d)に示す横位置の状態であるか、又は、図11(d)に示す縦位置の状態であるかを検出する。
【0037】
具体的には、姿勢センサ54は、例えば、静電容量型の加速度センサであって、3次元方向(X軸、Y軸、Z軸の3軸方向)の加速度を計測する。すなわち、姿勢センサ54は、検出した各軸方向における検出値を、CPU57の姿勢情報判定部57aに送信する。姿勢情報判定部57aは、姿勢センサ54の検出値に基づいて、第1立体視メガネ50本体に生じた3軸方向の加速度の合成値を検出する。そして、姿勢情報判定部57aは、その合成値に基づいて、第1立体視メガネ50の回転角度を求める。なお、説明を簡単にするため、第1立体視メガネ50の姿勢は、電源オンの後、ユーザが第1立体視メガネ50を装着した状態で横位置の状態にあることにする。この状態を基準とし、姿勢情報判定部57aは、例えば、第1立体視メガネ50が時計回り(又は反時計回り)に略90度回転して、縦位置の状態になるか否かを判定する。そして、第1立体視メガネ50が時計回りで縦位置の状態になった場合、姿勢情報判定部57aは、その後、反時計周りに略90度回転して横位置に戻るか否かを判定する。また、第1立体視メガネ50が反時計回りで縦位置の状態になった場合、姿勢情報判定部57aは、その後、時計周りに略90度回転して横位置に戻るか否かを判定する。これにより、姿勢情報判定部57aは、第1立体視メガネ50の姿勢を縦位置か横位置かの何れかを判定することができる。
【0038】
なお、第1実施形態では、加速度センサとして、静電容量型の加速度センサを採用したが、例えばピエゾ抵抗型の加速度センサ等の他の方式の加速度センサを採用しても良い。
【0039】
通信部55は、電子カメラ1に姿勢情報のデータの送信をするための通信インターフェースを提供する。電源部56は、姿勢センサ54、通信部55及びCPU57に電力を供給する。CPU57は、各種演算及び第1立体視メガネ50の統括的な制御を行なうマイクロプロセッサである。CPU57は、姿勢情報判定部57aとしても機能する。姿勢情報判定部57aは、上述した通り、姿勢センサ54の検出結果に基づいて、ユーザが第1姿勢と第2姿勢との何れかを判定する。通信部55は、電子カメラ1に判定結果を示す姿勢情報を送信する。なお、姿勢センサ54は、電源オンの後、継続的に第1立体視メガネ50の姿勢を検出し続ける。
【0040】
図5は、カメラシステム100の構成例を示す図である。カメラシステム100は、電子カメラ1と、第1立体視メガネ50とを備える。電子カメラ1は、第1立体視メガネ50側から姿勢情報を受信するため、例えば、赤外線通信を行なう。
【0041】
次に、電子カメラ1の3D撮影モード時における撮影動作の一例を説明する。図6は、電子カメラ1の撮影動作の一例を示すフローチャートである。以下の動作例では、電源オンの後、操作部19は、撮影モードとして静止画用の「3D撮影モード」が指示入力を受け付けると、CPU22は、図6に示すフローの処理を開始する。表示モニタ18は、例えば、第1撮像素子11aが出力するスルー画像を表示する。
【0042】
ステップS101:CPU22は、レリーズ釦20が全押し操作の指示入力を受け付けることにより、撮影処理を行なう。具体的には、CPU22は、レリーズ釦20の全押し操作に同期して、立体画像の元になる本画像(第1画像、第2画像、第3画像)を各々撮像させる指示をタイミングジェネレータ(不図示)を介して出す。第1撮像素子11a、第2撮像素子11b及び第3撮像素子11cは、立体画像の元になる本画像を各々出力する。信号処理部12は、第1撮像素子11a、第2撮像素子11b及び第3撮像素子11cが出力するアナログの画像信号をデジタル信号に変換しバス23に各々出力する。信号処理部12が出力するデジタル信号は、バス23を介して画像データとしてRAM13に一時記録される。
【0043】
図7は、3D撮影モードにおける構図の一例を説明する図である。図7では、図2(a)に示す電子カメラ1の正面図を反転させて描いており、説明をわかりやすくするため、背面の表示モニタ18等の図示を省略している。電子カメラ1には、上述した通り、同一の被写体を3箇所の視点から撮影するため、撮影光学系10a、10b、10cの撮影レンズが設けられている。電子カメラ1は、図7の場合、人物Pの被写体に対し、第1画像の構図、第2画像の構図及び第3画像の構図で撮影する。これにより、電子カメラ1は、撮影光学系10aと撮影光学系10bとから第1姿勢での立体視用の第1立体画像の元になる一対の画像(第1画像、第2画像)を取得すると共に、撮影光学系10bと撮影光学系10cとから第2姿勢での立体視用の第2立体画像の元になる一対の画像(第2画像、第3画像)を取得する。
【0044】
ステップS102:CPU22の姿勢情報作成部22aは、第1姿勢情報及び第2姿勢情報を作成する。具体的には、姿勢情報作成部22aは、第1画像と第2画像に基づいて、第1姿勢情報を作成する。ここで、第1姿勢情報は、第1画像と第2画像とから第1姿勢での立体視用の第1立体画像を生成することを表す情報である。
【0045】
また、姿勢情報作成部22aは、第2画像と第3画像に基づいて、第2姿勢情報を作成する。ここで、第2姿勢情報は、第2画像と第3画像とから第2姿勢での立体視用の第2立体画像を生成することを表す情報である。
【0046】
ステップS103:CPU22の記録処理部22bは、記録処理を行なう。具体的には、記録処理部22bは、第1姿勢情報と第2姿勢情報とを各々対応する画像に関連付けた画像ファイルとして記録媒体30に記録する。
【0047】
図8は、画像ファイルの構成の一例を説明する図である。図8(a)は、Exif(Exchangeable Image File Format)形式の画像ファイルの構成を模式的に示した図である。図8(b)は、第1姿勢情報、第2姿勢情報を示す図である。
【0048】
ここで、画像ファイルは、ヘッダ領域と画像データ領域とを有する。カメラ情報(焦点距離等の撮影情報)は、タグデータとしてヘッダ領域に記録される。また、第1画像、第2画像、第3画像の画像データは、図8(a)に示す画像データ領域に記録される。
【0049】
なお、ヘッダ領域には、メーカ独自のフォーマットでデータを記録できるメーカノートの領域がある。記録処理部22bは、第1姿勢情報、第2姿勢情報を画像ファイルのメーカノートの領域に書き込む。また、記録処理部22bは、RAM13から一時記録された第1画像、第2画像、第3画像の画像データを読み出して画像ファイルの画像データ領域に書き込む。記録処理部22bは、その画像ファイルを記録媒体30に記録する。この記録処理により、立体画像の元になる画像ファイルが得られる。そして、CPU22は、図6に示すフローの処理を終了させる。
【0050】
次に立体画像の再生について説明する。図9は、電子カメラ1における立体画像の再生動作の一例を示すフローチャートである。図10、図11は、立体画像の再生処理を説明する図である。
【0051】
以下の動作例では、電子カメラ1の電源オンの後、操作部19は、再生モードとして「3D再生モード」が指示入力を受け付けると、CPU22は、図9に示すフローの処理を開始する。ここで、3D再生モードでは、下位のモードとして、立体画像の元になる画像を読み込んだ後に立体画像を生成する「立体画像生成モード」と、例えば電子カメラ1により既に記録済みの立体画像を読み込む「立体画像読込みモード」とがある。そのため、立体画像読込みモードでは、立体画像生成部22cの処理(後述するステップS203の処理)が不要となる。
【0052】
操作部19は、立体画像生成モードと立体画像読込みモードとの何れかの選択入力を受け付ける。なお、ユーザは第1立体視メガネ50を装着しており、この第1立体視メガネ50の電源がオンになっていることとする。これにより、第1立体視メガネ50の姿勢センサ54は、継続的に第1立体視メガネ50の姿勢を検出し続ける。CPU57の姿勢情報判定部57aは、姿勢センサ54の検出結果に基づいて、ユーザが第1姿勢と第2姿勢との何れかを判定する。通信部55は、電子カメラ1に判定結果を示す姿勢情報を無線(赤外線通信)にて継続的に送信する。
【0053】
ステップS201:CPU22は、立体画像生成モードか否かを判定する。立体画像生成モードの場合(ステップS201:Yes)、CPU22は、ステップS202−1の処理に移行する。一方、立体画像生成モードでなく、立体画像読込みモードの場合(ステップS201:No)、ステップS202−2の処理に移行する。
【0054】
ステップS202−1:CPU22の立体画像生成部22cは、立体画像の生成を行なう。具体的には、立体画像生成部22cは、記録媒体30から第1立体画像と第2立体画像の元になる画像ファイルを読み出して、RAM13の作業領域に一時記録する。そして、CPU22は、ステップS203の処理に移行する。
【0055】
ステップS202−2:CPU22は、例えば、記録媒体30から第1立体画像と第2立体画像を読み込み、RAM13に一時記録する。そして、CPU22は、ステップS204の処理に移行する。
【0056】
ステップS203:CPU22の立体画像生成部22cは、立体画像の生成を行なう。具体的には、立体画像生成部22cは、RAM13の作業領域から画像ファイルを読み出して、立体画像を生成する。すなわち、立体画像生成部22cは、図10(a)に示す第1画像AをY方向に複数の縦一列のラインに分割し、奇数ラインの画像(A1からAN)を抽出する。一方、立体画像生成部22cは、図10(a)に示す第2画像BをY方向に複数の縦一列のライン(第1画像と同数のライン)に分割し、偶数ラインの画像(B1からBN)を抽出する。なお、立体画像生成部22cは、複数列のRGBの画素列を縦一列のラインとしても良い。
【0057】
そして、立体画像生成部22cは、第1画像Aのうち奇数ラインの画像(A1からAN)と第2画像Bのうち偶数ラインの画像(B1からBN)とに基づいて、A1、B1、A2、B2、A3、B3、・・・AN、BNとなるようにして第1立体画像を生成する(図10(b)参照)
同様にして、立体画像生成部22cは、第1画像Aのうち奇数ラインの画像(A1からAN)と、第3画像Cのうち偶数ラインの画像(C1からCN)とに基づいて、A1、C1、A2、C2、A3、C3、・・・AN、CNとなるようにして第2立体画像を生成する(図11(b)参照)。そして、CPU22は、ステップS204の処理に移行する。
【0058】
ステップS204:CPU22の姿勢情報取得部22dは、現在の姿勢を示す姿勢情報を取得する。具体的には、姿勢情報取得部22dは、第1立体視メガネ50からの姿勢情報を通信部17を介して取得し、RAM13に順次上書きして記録する。
【0059】
ステップS205:CPU22の表示制御部22eは、立体画像を表示モニタ18に表示させる。具体的には、表示制御部22eは、RAM13から姿勢情報を読み出して、第1姿勢と第2姿勢との何れかを判別する。そして、表示制御部22eは、判別結果が第1姿勢の場合、第1立体画像を表示モニタ18に表示させる(図10(b)参照)。一方、表示制御部22eは、判別結果が第2姿勢の場合、第2立体画像を表示モニタ18に表示させる(図11(b)参照)。
【0060】
例えば、図10の第1姿勢の場合を例にすると、図10(d)に示す通り、第1立体視メガネ50を装着したユーザは、左目用レンズ51にて垂直偏光により、第2画像Bのうち偶数ラインの画像(B1からBN)を見ることができる。
【0061】
また、ユーザは、右目用レンズ51にて、水平偏光により、第1画像Aのうち奇数ラインの画像(A1からAN)を見ることができる。これにより、ユーザは、図10(c)に示す通り、3D画像として被写体(立体像)を認識することができる。なお、図10(d)では、説明をわかりやすくするため、第2画像Bが垂直偏光であることを示すマークを左目用レンズ51に描いている。また、第1画像Aが水平偏光であることを示すマークを右目用レンズ52に描いている。
【0062】
また、同様にして、図11の第2姿勢の場合を例にすると、図11(d)に示す通り、第1立体視メガネ50を装着したユーザは、左目用レンズ51にて垂直偏光により、第3画像Cのうち偶数ラインの画像(C1からCN)を見ることができる。また、ユーザは、右目用レンズ52にて、水平偏光により、第1画像Aのうち奇数ラインの画像(A1からAN)を見ることができる。これにより、ユーザは、図11(c)に示す通り、3D画像として被写体(立体像)を認識することができる。なお、図11(d)では、説明をわかりやすくするため、第3画像Cが垂直偏光であることを示すマークを左目用レンズ51に描いている。また、第1画像Aが水平偏光であることを示すマークを右目用レンズ52に描いている。
【0063】
ステップS206:CPU22の姿勢情報取得部22dは、姿勢情報の変更の有無を判定する。具体的には、姿勢情報取得部22dは、第1立体視メガネ50の通信部55から送信されてくる判定結果を示す姿勢情報を監視しており、姿勢情報に変更が有った場合(ステップS206:Yes)、CPU22は、ステップS207の処理に移行する。一方、姿勢情報に変更が無かった場合(ステップS206:No)、CPU22は、ステップS208の処理に移行する。
【0064】
ステップS207:表示制御部22eは、立体画像を切り替えて表示モニタ18に表示する。例えば、第1姿勢から第2姿勢に変更が生じた場合、表示制御部22eは、図10(b)に示す第1立体画像から、図11(b)に示す第2立体画像に切り替えて表示モニタ18に表示する。
【0065】
ステップS208:CPU22は、再生モード終了の指示入力の有無を判定する。再生モード終了の指示入力を受け付けない場合(ステップS208:No)、CPU22は、ステップS206の処理に戻る。再生モード終了の指示入力を受け付けた場合(ステップS208:Yes)、CPU22は、図9に示すフローの処理を終了させる。なお、記録処理部22bは、ユーザの指示入力に応じて、生成した第1立体画像と第2立体画像を記録媒体30に記録しても良い。
【0066】
以上より、第1実施形態の電子カメラ1によれば、第1姿勢と第2姿勢とに対応した立体画像の元になる画像を取得することができる。また、第1実施形態の第1立体視メガネ50によれば、第1姿勢と第2姿勢とに応じて、ユーザに被写体を立体視させることができる。従って、第1実施形態のカメラシステム100によれば、ユーザの見る姿勢に応じて立体視が容易となる手段を提供できる。
【0067】
(第1変形例)
次に、第1変形例について説明する。第1変形例では、姿勢情報取得部22dは、第1姿勢と第2姿勢との何れかを示す姿勢情報を顔認識部22fから取得する。具体的には、顔認識部22fは、立体画像を見るユーザの顔認識をするため、第4撮像素子11dが出力する画像から人物の顔を認識する。例えば、顔認識部22fは、第4画像を解析して人物の顔を抽出し、顔を主要被写体として認識する。具体的には、顔認識部22fは、第4画像の画像信号の輝度分布に基づいて、肌色領域を顔の領域として抽出する。顔認識部22fは、顔を検出した場合、さらに顔の特徴部位を検出する。すなわち、顔認識部22fは、例えば、特開2001−16573号公報等に記載された特徴点抽出処理によって、目、鼻、耳、唇等の顔の特徴部位を第4画像から検出する。そして、顔認識部22fは、特徴部位の位置関係に基づいて、顔が第1姿勢と第2姿勢との何れかであるかを認識する。これにより、姿勢情報取得部22dは、姿勢情報を顔認識部22fから取得することができる。
【0068】
なお、第1変形例では、一例として、いわゆるパララックスバリア方式によりユーザが裸眼で表示モニタ18を見る場合について説明する。この場合、表示制御部22eは、表示モニタ18の液晶表示媒体に対して電圧を制御することにより、例えば、複数の縦一列のスリット(遮光バリア)を所定の間隔毎に形成する。これにより、ユーザは、例えば、表示モニタ18に表示された第1立体画像に対して、第1画像のみが右目で見ることができ、第2画像のみを左目で見ることができる。その結果、ユーザは、第1立体画像に基づいて立体像を見ることができる。
【0069】
従って、表示制御部22eは、ユーザが第1姿勢の場合には、表示モニタ18に第1立体画像を表示し、ユーザが第2姿勢の場合には、表示モニタ18に第2立体画像を表示する。
【0070】
以上より、第1変形例によれば、顔認識部22fにより認識された第1姿勢と第2姿勢とに応じて、ユーザに被写体を立体視させることができる。
【0071】
(第2変形例)
次に、第2変形例について説明する。図12は、第2変形例を説明する図である。第2変形例では、姿勢情報取得部22dは、第1姿勢と第2姿勢との何れかを示す姿勢情報を姿勢センサ21から取得する。なお、この場合、第2変形例では、レリーズ釦20が紙面上下(Y)方向にある場合を横位置(第1姿勢に対応)とし(図12(a))、レリーズ釦20が紙面左右(X)方向にある場合を縦位置(第2姿勢に対応)とする(図12(b))。
【0072】
姿勢センサ21は、電子カメラ1が図12(a)に示す横位置の状態にあるか、図12(b)に示す縦位置の状態にあるかを検出する。具体的には、姿勢センサ21は、上記の姿勢センサ54と同様の静電容量型の加速度センサであって、3次元方向の加速度を計測する。すなわち、姿勢センサ21は、検出した各軸方向における検出値を、CPU22の姿勢情報取得部22dに送信する。姿勢情報取得部22dは、検出値に基づいて、電子カメラ1が横位置か縦位置かの何れかを算出する。なお、説明の便宜上、電子カメラ1本体の姿勢は、電源オンの後、横位置の状態にあることにする。この状態を基準とし、姿勢情報取得部22dは、電子カメラ1本体が時計回り(又は反時計回り)に略90度回転して、縦位置の状態になるか否かを判定する。また、姿勢情報取得部22dは、電子カメラ1本体が時計回り(又は反時計回り)に略90度回転して、横位置の状態になるか否かを判定する。これにより、姿勢情報取得部22dは、姿勢センサ21の検出値に応じて、電子カメラ1が横位置か縦位置かの何れかであるかの姿勢情報を取得できる。なお、第2変形例では、第1変形例と同様にして、パララックスバリア方式によりユーザが裸眼で表示モニタ18を見ることとする。
【0073】
従って、表示制御部22eは、電子カメラ1本体が第1姿勢の場合には、表示モニタ18に第1立体画像を表示し、電子カメラ1本体が第2姿勢の場合には、表示モニタ18に第2立体画像を表示する。
【0074】
以上より、第2変形例によれば、姿勢センサ21により検出された第1姿勢と第2姿勢とに応じて、ユーザに被写体を立体視させることができる。
【0075】
(第3変形例)
次に、第3変形例について説明する。図13は、第3変形例を説明する図である。第3変形例では、表示制御部22eは、電子カメラ1本体の姿勢と、ユーザの姿勢とに応じて、表示モニタ18に第1立体画像又は第2立体画像を表示する。なお、第3変形例では、ユーザの姿勢として、第1立体視メガネ50の装着の有無を場合分けして説明する。
【0076】
図13(a)は、電子カメラ1本体の姿勢(縦位置と横位置との何れか一方)と、第1立体視メガネ50の姿勢センサ54が検出する第1姿勢と第2姿勢との何れか一方との組み合わせの場合について例示している。
【0077】
一方、図13(b)は、電子カメラ1本体の姿勢(縦位置と横位置との何れか一方)と、顔認識部22fが認識する第1姿勢と第2姿勢との何れか一方との組み合わせの場合について例示している。図13(b)の場合は、第1変形例と同様、ユーザは裸眼で立体視することとする。
【0078】
従って、表示制御部22eは、図13に示す組み合わせに基づいて、表示モニタ18に第1立体画像又は第2立体画像を切り替え自在に表示することができる。
【0079】
以上より、第3変形例によれば、電子カメラ1本体の姿勢と第1立体視メガネ50の姿勢、又は、電子カメラ1本体の姿勢とユーザの顔の姿勢とを考慮して、より正確にユーザに被写体を立体視させることができる。
【0080】
(第4変形例)
次に、第4変形例について説明する。第4変形例では、撮影画像を横長に撮影した横位置撮影(図12(a)の状態で撮影)と撮影画像を縦長に撮影した縦位置撮影(図12(b)の状態で撮影)との何れかで撮影された撮影情報を第1姿勢情報及び第2姿勢情報に追加する。具体的には、図6に示すステップS102のフローの処理において、姿勢情報作成部22aは、上記の撮影情報を追加した第1姿勢情報及び第2姿勢情報を作成する。そして、図6に示すステップS103のフローの処理において、記録処理部22bは、撮影情報を追加した第1姿勢情報、第2姿勢情報を画像ファイルのメーカノートの領域に書き込む。
【0081】
そして、表示制御部22eは、立体画像の再生の際、第1立体画像と第2立体画像との何れかを、縦長と横長との何れかの表示態様で表示部に切り替え自在に表示させる。
【0082】
図14は、第4変形例を説明する図である。例えば、第1立体視メガネ50が第1姿勢の場合、表示制御部22eは、横位置撮影であれば、第1立体画像を表示モニタ18に表示させる。また、表示制御部22eは、縦位置撮影であれば、第2立体画像を表示モニタ18に表示させる。この場合、表示制御部22eは、表示モニタ18上で、縦長撮影された画像を縦長の向きで表示させる。なお、図14では、第1立体視メガネ50の姿勢と横・縦位置撮影の組み合わせを例示しているが、ユーザの顔の姿勢と横・縦位置撮影の組み合わせの場合も、図14と同様になる。
【0083】
以上より、第4変形例によれば、第1立体視メガネ50の姿勢と横・縦位置撮影の組み合わせ、又は、ユーザの顔の姿勢と横・縦位置撮影の組み合わせを考慮して、ユーザに被写体を立体視させることができる。
【0084】
(第5変形例)
次に第5変形例について説明する。第1実施形態では、静止画撮影された画像を対象にしたが、第5変形例では、動画撮影された画像を対象にして説明をする。この場合、動画を立体視するため、液晶シャッタを搭載した第2立体視メガネを用いることとする。
【0085】
図15は、第2立体視メガネ60の正面図である。第2立体視メガネ60は、一例として、動画用の液晶シャッタ(アクティブシャッタ)方式のメガネである。第2立体視メガネ60は、左目用レンズ61に第1液晶シャッタ61aを備え、右目用レンズ62に第2液晶シャッタ62aを備える。また、第2立体視メガネ60の上面には、第1液晶シャッタ61a及び第2液晶シャッタ62aを除く電気系統の装置63を備える。
【0086】
図16は、第2立体視メガネ60の構成例を示すブロック図である。第2立体視メガネ60は、第1液晶シャッタ61aと、第2液晶シャッタ62aと、電気系統の装置63として、姿勢センサ64、通信部65、電源部66及びCPU67を備える。
【0087】
姿勢センサ64は、上記の姿勢センサ54と同様の静電容量型の加速度センサであって、第2立体視メガネ60の姿勢を検出する。通信部65は、電子カメラ1に姿勢情報のデータの送信をするための通信インターフェースを提供する。また、通信部65は、電子カメラ1側からの動画再生に伴う同期信号を受信する。
【0088】
電源部66は、CPU67等各部に電力を供給する。CPU67は、各種演算及び第2立体視メガネ60の統括的な制御を行なうマイクロプロセッサである。CPU67は、姿勢情報判定部67aと、液晶シャッタ制御部67bしても機能する。
【0089】
姿勢情報判定部67aは、姿勢センサ64の検出結果に基づいて、第1姿勢と第2姿勢との何れかを判定する。通信部65は、電子カメラ1に判定結果を示す姿勢情報を送信する。なお、姿勢センサ64は、電源オンの後、継続的に第2立体視メガネ60の姿勢を検出し続ける
液晶シャッタ制御部67bは、通信部65が受信した同期信号に基づいて、電気的な操作により、第1液晶シャッタ61aと第2液晶シャッタ62aとに対して、交互にオンとオフとを切り替える。
【0090】
次に、電子カメラ1の動画記録処理について説明する。以下の動作例では、図6に示すフローの処理を流用して説明する。操作部19は、撮影モードとして動画記録用の「3D撮影モード」の指示入力を受け付けると、CPU22は、図6に示すフローの処理を開始する。表示モニタ18は、例えば、第1撮像素子11aが出力するスルー画像を表示する。
【0091】
ステップS101:CPU22は、操作部19が動画記録の指示入力を受け付けることにより、撮影処理(動画記録処理)を行なう。具体的には、CPU22は、動画記録の指示入力に同期して、立体画像の元になる本画像(第1画像、第2画像、第3画像)を各々撮像させる指示をタイミングジェネレータ(不図示)を介して出す。第1撮像素子11a、第2撮像素子11b及び第3撮像素子11cは、立体画像の元になる本画像を各々出力する。信号処理部12は、第1撮像素子11a、第2撮像素子11b及び第3撮像素子11cが出力するアナログの画像信号をデジタル信号に変換しバス23に各々出力する。信号処理部12が出力するデジタル信号は、バス23を介して画像データとして例えばRAM13のデータの保存領域に、第1画像、第2画像、第3画像のサイクルで順次、動画像ファイルとして一時記録されて行く。
【0092】
ステップS102:CPU22の姿勢情報作成部22aは、第1姿勢情報及び第2姿勢情報を作成する。具体的には、姿勢情報作成部22aは、第1画像と第2画像に基づいて、第1姿勢情報を作成する。また、姿勢情報作成部22aは、第2画像と第3画像に基づいて、第2姿勢情報を作成する。
【0093】
ステップS103:CPU22の記録処理部22bは、記録処理を行なう。具体的には、記録処理部22bは、動画像ファイルのヘッダ情報に第1姿勢情報と第2姿勢情報とを付加した後、記録媒体30に記録する。この記録処理により、立体画像の元になる動画像ファイルが得られる。そして、CPU22は、図6に示すフローの処理を終了させる。なお、2Dの動画像のファイルの記録方式としては、例えばAVI(Audio Video Interleave)形式を採用することが好ましい。
【0094】
次に立体画像の動画再生について説明する。以下の動作例では、図9に示すフローの処理を流用して説明する。操作部19は、再生モードとして動画再生用の「3D再生モード」の指示入力を受け付けると、CPU22は、図9に示すフローの処理を開始する。
【0095】
なお、ユーザは第2立体視メガネ60を装着しており、この第2立体視メガネ60の電源がオンになっていることとする。これにより、第2立体視メガネ60の姿勢センサ64は、継続的に第2立体視メガネ60の姿勢を検出し続ける。CPU67の姿勢情報判定部67aは、姿勢センサ64の検出結果に基づいて、ユーザが第1姿勢と第2姿勢との何れかを判定する。通信部65は、電子カメラ1に判定結果を無線(赤外線通信)にて継続的に送信する。
【0096】
ここで、図9に示すフローの処理において、ステップS201、ステップS202−1及びステップS202−2の処理については、上述した立体画像の静止画再生の処理と同様であるので説明を省略する。
【0097】
ステップS203:CPU22の立体画像生成部22cは、立体画像の生成を行なう。具体的には、立体画像生成部22cは、記録媒体30から動画像ファイルを読み出して、RAM13の作業領域に立体画像を生成する。
【0098】
図17は、動画像による立体画像の生成処理を説明する図である。立体画像生成部22cは、図17に示す通り、第1画像A、第2画像B、第3画像Cのサイクルで動画像ファイルを読み出して、RAM13の作業領域に一時記録する。立体画像生成部22cは、動画像ファイルのヘッダファイルから第1姿勢情報及び第2姿勢情報を読み出す。立体画像生成部22cは、第1姿勢情報を読み出した場合、第1画像A、第2画像Bの組み合わせの第1立体画像を所定のフレームレート(例えば60fps)で順次生成する。また、立体画像生成部22cは、第2姿勢情報を読み出した場合、第1画像A、第3画像Cの組み合わせの第2立体画像を所定のフレームレート(例えば60fps)で順次生成する。
【0099】
ステップS204:CPU22の姿勢情報取得部22dは、現在の姿勢を示す姿勢情報を取得する。具体的には、姿勢情報取得部22dは、第2立体視メガネ60からの姿勢情報を通信部17を介して取得し、RAM13に順次上書きして記録する。
【0100】
ステップS205:CPU22の表示制御部22eは、立体画像を表示モニタ18に表示させる。具体的には、表示制御部22eは、RAM13から姿勢情報を読み出して、第1姿勢と第2姿勢との何れかを判別する。そして、表示制御部22eは、判別結果が第1姿勢の場合、第1立体画像を表示モニタ18に表示させる。一方、表示制御部22eは、判別結果が第2姿勢の場合、第2立体画像を表示モニタ18に表示させる。この表示の際、表示制御部22eは、例えば第1姿勢の場合、所定のフレームレート(例えば、60fps)で、第1画像A(左目用の画像)と第2画像B(右目用の画像)とを交互に切り替えて表示モニタ18に表示させる。また、電子カメラ1の通信部17は、動画再生に伴う同期信号を第2立体視メガネ60の通信部65に送信する。通信部65は、同期信号を受信する。液晶シャッタ制御部67bは、通信部65が受信した同期信号に基づいて、電気的な操作により、第1液晶シャッタ61aと第2液晶シャッタ62aとに対して、交互にオンとオフと切り替える。これにより、ユーザの左目には、左目用の画像が見え、ユーザの右目には、右目用の画像が見えることにより、ユーザは、3D動画像として被写体(立体像)を認識することができる。
【0101】
ステップS206:CPU22の姿勢情報取得部22dは、姿勢情報の変更の有無を判定する。姿勢情報に変更が有った場合(ステップS206:Yes)、CPU22は、ステップS207の処理に移行する。一方、姿勢情報に変更が無かった場合(ステップS206:No)、CPU22は、ステップS208の処理に移行する。
【0102】
ステップS207:表示制御部22eは、ステップS206にて例えば第1姿勢から第2姿勢に変更した判定結果であった場合、第2立体画像を表示モニタ18に表示させる。この表示の際、表示制御部22eは、第2姿勢の場合、所定のフレームレート(例えば、60fps)で、第1画像A(左目用の画像)と第3画像C(右目用の画像)とを交互に切り替えて表示モニタ18に表示させる。その後の処理はステップS205の処理と同様であって、液晶シャッタ制御部67bは、通信部65が受信した同期信号に基づいて、電気的な操作により、第1液晶シャッタ61aと第2液晶シャッタ62aとに対して、交互にオンとオフと切り替える。これにより、ユーザの左目には、左目用の画像が見え、ユーザの右目には、右目用の画像が見えることにより、ユーザは、3D動画像として被写体(立体像)を認識することができる。
【0103】
ステップS208:CPU22は、再生モード終了の指示入力の有無を判定する。再生モード終了の指示入力を受け付けない場合(ステップS208:No)、CPU22は、ステップS206の処理に戻る。再生モード終了の指示入力を受け付けた場合(ステップS208:Yes)、CPU22は、図9に示すフローの処理を終了させる。
【0104】
以上より、第5変形例によれば、3Dの動画再生の場合であっても、ユーザに被写体を立体視させることができる。
【0105】
(第2実施形態)
次に、第2実施形態について説明する。第2実施形態では、本発明のカメラシステムの一実施形態について説明する。第2実施形態では、3台の電子カメラを電気的に接続すると共に、3つの撮影光学系を第1実施形態と同様に立体画像が撮影できる配置にすることを特徴とする。
【0106】
図18は、カメラシステム200の構成例を示す図である。カメラシステム200は、3台の電子カメラ2、3、4と、第1立体視メガネ50とを備える。なお、電子カメラ2、3、4は、同一の構成とする。
【0107】
図18では、電子カメラ2、3、4の筐体の正面図と、第1立体視メガネ50との正面図を表している。電子カメラ2の撮影光学系2aの光軸L4と電子カメラ3の撮影光学系2bの光軸L5とは、第1実施形態と同様、両眼視差の距離(瞳孔間距離の平均値)だけ離れており、電子カメラ3の撮影光学系2bの光軸L5と電子カメラ4の撮影光学系2cの光軸L6とは、第1実施形態と同様、両眼視差の距離(瞳孔間距離の平均値)だけ離れている。この配置により、電子カメラ2、3、4は、第1実施形態の電子カメラ1と同様、例えば静止画撮影の場合、撮影光学系2bと撮影光学系2cとから第1姿勢での立体視用の第1立体画像の元になる一対の画像を取得すると共に、撮影光学系2aと撮影光学系2bとから第2姿勢での立体視用の第2立体画像の元になる一対の画像を取得することができる。また、電子カメラ2、3、4の筐体の上面には、第1レリーズ釦20a、第2レリーズ釦20b、第3レリーズ釦20cが各々設けられている。また、電子カメラ2、3、4は、第1接続アダプタ25、第2接続アダプタ26を介して互いに電気的に接続されている。なお、図18に示すカメラシステム200では、第1立体視メガネ50を一例として採用しているが、第2立体視メガネ60であっても良い。
【0108】
図19は、電子カメラ2、3、4の構成例を示すブロック図である。なお、電子カメラ2、3、4は、同一の構成であるので、電子カメラ2を代表して説明する。
【0109】
電子カメラ2は、第1撮影光学系2aと、第1撮像素子3aと、第1信号処理部4aと、第1RAM5aと、第1画像処理部6aと、第1フラッシュメモリ7aと、第1表示モニタ8aと、第1記録I/F部9aと、第1通信部17aと、第1操作部19aと、第1レリーズ釦20aと、第1姿勢センサ21、第1CPU221と、バス23aとを備える。なお、
このうち、第1信号処理部4a、第1RAM5a、第1画像処理部6a、第1フラッシュメモリ7a、第1表示モニタ8a、記録I/F部9a、第1通信部17a、第1操作部19a、第1姿勢センサ21及び第1CPU221は、バス23aを介して互いに接続されている。また、上述した通り、電子カメラ2、3、4は、第1接続アダプタ25、第2接続アダプタ26を介して、互いに接続されている。
【0110】
なお、各ブロックの機能については、第1実施形態の電子カメラ1の第1撮影光学系10a、第1撮像素子11a、信号処理部12、RAM13、画像処理部14、フラッシュメモリ15、記録I/F部16と、通信部17、表示モニタ18、操作部19と、レリーズ釦20と、姿勢センサ21と、CPU22と同様であるので説明を省略する。また、第1CPU221は、電子カメラ1のCPU22の姿勢情報作成部22a、記録処理部22b、立体画像生成部22c、姿勢情報取得部22d、表示制御部22e、顔認識部22fと同様の機能を有する。
【0111】
次に、カメラシステム200における動作の一例について説明をする。先ず、カメラシステム200での3D撮影モード時における撮影動作の一例を説明する。以下の動作例では、図6に示すフローの処理を流用して説明する。先ず、電子カメラ2の操作部19aは、電子カメラ2、3、4の電源オンの後、撮影モードとして静止画用の「3D撮影モード」が指示入力を受け付けると、CPU22は、図6に示すフローの処理を開始する。
【0112】
ステップS101:CPU22は、第1レリーズ釦20aによる全押し操作の指示入力を受け付けることにより撮影処理を行なう。具体的には、第1CPU221が第1レリーズ釦20aによる全押し操作の指示入力を受け付けた場合、第1CPU221は、第2CPU222及び第3CPU223に指示を出す。続いて、第1CPU221、第2CPU222及び第3CPU223は、第1レリーズ釦20aの全押し操作の指示入力と同期して、各々静止画撮影の処理を行なう。例えば、電子カメラ2では、第1画像が第1RAM5aに一時記録される。また、電子カメラ3では、第2画像が第2RAM5bに一時記録される。また、電子カメラ4では、第3画像が第3RAM5cに一時記録される。
【0113】
ステップS102:CPU221(姿勢情報作成部)は、第1姿勢情報及び第2姿勢情報を作成する。具体的には、CPU221(姿勢情報作成部)は、第2画像と第3画像に基づいて、第1姿勢情報を作成する。CPU221(姿勢情報作成部)は、第1画像と第2画像に基づいて、第2姿勢情報を作成する。
【0114】
ステップS103:CPU221(記録処理部)は、記録処理を行なう。具体的には、CPU221は、第2通信部17bを介して、第2RAM5bから第2画像(画像データ)を第1通信部17aで受信する。そして、CPU221(記録処理部)は、第2画像を第1RAM5aに一時記録する。また、CPU221は、第3通信部17cを介して、第3RAM5cから第3画像(画像データ)を第1通信部17aで受信する。そして、CPU221(記録処理部)は、第3画像を第1RAM5aに一時記録する。
【0115】
続いて、CPU221(記録処理部)は、第1実施形態の場合と同様にして、図8に示す画像ファイルを生成した後、第1記録媒体30aに記録する。この記録処理により、立体画像の元になる画像ファイルが得られる。そして、CPU221は、図6に示すフローの処理を終了させる。なお、立体画像の再生については、第1実施形態の場合と同様であるので説明を省略する。
【0116】
以上より、第2実施形態の電子カメラ2、3、4によれば、第1姿勢と第2姿勢とに対応した立体画像の元になる画像を取得することができる。また、第2実施形態の第1立体視メガネ50によれば、第1姿勢と第2姿勢とに応じて、ユーザに被写体を立体視させることができる。従って、第2実施形態のカメラシステム200によれば、ユーザの見る姿勢に応じて立体視が容易となる手段を提供できる。
【0117】
(第3実施形態)
次に、第3実施形態について説明する。第3実施形態では、本発明の表示システムの一実施形態について説明する。
【0118】
図20は、表示システム300の構成例を示す図である。表示システム300は、表示装置70と、第1立体視メガネ50とを備える。
【0119】
図20では、表示装置70の筐体の正面図と、第1立体視メガネ50との正面図を表している。表示装置70の正面には、撮影光学系71の撮影レンズ、表示モニタ75、電源釦79が設けられている。表示装置70と第1立体視メガネ50とは、例えば赤外線通信により姿勢情報等のデータの送受信がなされる。表示システム300では、表示装置70が、例えば、第1実施形態の電子カメラ1で記録された第1姿勢と第2姿勢とに対応した立体画像の元になる画像ファイルを読み込んで、立体画像を再生する。
【0120】
図21は、表示装置70の構成例を示すブロック図である。ここで、表示装置70は、2次元の2D画像を再生するための「2D再生モード」と、立体画像を再生するための「3D再生モード」を有している。
【0121】
表示装置70は、カメラ部71と、RAM72と、フラッシュメモリ73と、記録I/F部74と、表示モニタ75と、通信部76と、操作部77と、姿勢センサ78と、電源釦79と、CPU80と、バス81とを備える。
【0122】
カメラ部71は、撮影光学系71aと、撮像部71bとを備える。なお、本実施形態の表示装置70では、カメラ部71は内蔵されているが、外付けでも良い。外付けの場合、カメラ部71は、例えばUSB(Universal Serial Bus)接続を介して、バス81と電気的に接続する。
【0123】
RAM72は、揮発性の半導体メモリである。フラッシュメモリ73は、書き換え可能な不揮発性の半導体メモリである。記録I/F部74は、コネクタ(不図示)に接続された着脱自在の記録媒体30にアクセスする。表示モニタ75は、例えば液晶表示媒体により構成される。そして、表示モニタ75は、2次元の2D画像、立体画像(3D画像)、表示装置70の操作メニューを表示する。通信部76は、第1立体視メガネ50等の立体視メガネの姿勢情報を例えば赤外線通信で実現するための通信インターフェースを提供する。
【0124】
操作部77は、表示モニタ75の表面に配置された透明のタッチパネルである。操作部77は、タッチパネル表面に接触した指先等の位置を検出して撮影者からの操作を受け付ける。また、操作部77は、カメラ部71のレリーズ釦の機能を有する。
【0125】
姿勢センサ78は、上記の姿勢センサ21、54、64と同様の静電容量型の加速度センサであって、表示装置70本体の姿勢を検出する。電源釦79は、その電源釦79のオンにより、各部に電力を供給する。
【0126】
CPU80は、表示装置70の制御を行なうプロセッサである。CPU80は、フラッシュメモリ74に予め格納されたシーケンスプログラムを実行することにより、表示装置70の各部の制御等を行なう。また、CPU80は、読込部80a、立体画像生成部80b、姿勢情報取得部80c、表示制御部80d、顔認識部80eとしても機能する。
【0127】
読込部80aは、第1姿勢情報と第2姿勢情報とが関連付けて記録されている、第1立体画像及び第2立体画像の元になる複数の画像を読み込む。具体的には、電子カメラ1で記録された立体画像の元になる画像ファイルを読み込む。そして、読込部80aは、読み込んだ画像ファイルをRAM72の作業領域に一時記録する。ここで、読込部80aは、例えば、記録媒体30に既に立体画像が記録されている場合、その立体画像を読み込んでも良い。
【0128】
なお、立体画像生成部80b、姿勢情報取得部80c、表示制御部80d及び顔認識部80eは、第1実施形態の立体画像生成部22c、姿勢情報取得部22d、表示制御部22e及び顔認識部22fと各々同様の機能であるので説明を省略する。
【0129】
次に、表示システム300における立体画像の再生動作について説明する。以下の動作例では、表示装置70の電源オンの後、操作部19は、再生モードとして「3D再生モード」の指示入力を受け付けると、CPU80は、3D再生モードの処理を開始する。なお、ユーザは第1立体視メガネ50を装着しており、この第1立体視メガネ50の電源がオンになっていることとする。これにより、第1立体視メガネ50の姿勢センサ54は、継続的に第1立体視メガネ50の姿勢を検出し続ける。第1立体視メガネ50のCPU57の姿勢情報判定部57aは、姿勢センサ54の検出結果に基づいて、ユーザが第1姿勢と第2姿勢との何れかを判定する。通信部55は、表示装置70に判定結果を示す姿勢情報を無線(赤外線通信)にて継続的に送信する。その後の動作については、上述した図9のフローの処理と同様であるので、説明を省略する。
【0130】
以上より、第3実施形態の表示システムによれば、第1姿勢と第2姿勢とに応じて、ユーザに被写体を立体視させることができる。従って、第3実施形態の表示システム300によれば、ユーザの見る姿勢に応じて立体視が容易となる手段を提供できる。
【0131】
なお、表示装置70は、第1変形例と同様にして、姿勢情報取得部80cが第1姿勢と第2姿勢との何れかを示す姿勢情報を顔認識部80eから取得しても良い。これにより、表示装置70は、顔認識部80eにより認識された第1姿勢と第2姿勢とに応じて、ユーザに被写体を立体視させることができる。
【0132】
或いは、表示装置70は、第2変形例と同様にして、姿勢情報取得部80cが第1姿勢と第2姿勢との何れかを示す姿勢情報を姿勢センサ78から取得しても良い。これにより、表示装置70は、姿勢センサ78により検出された第1姿勢と第2姿勢とに応じて、ユーザに被写体を立体視させることができる。
【0133】
或いは、表示装置70は、第3変形例と同様にして、表示制御部80dが表示装置70本体の姿勢と第1立体視メガネ50の姿勢とに応じて、表示モニタ75に第1立体画像又は第2立体画像を表示しても良い。また、表示制御部80dは、表示装置70本体の姿勢とユーザの顔の姿勢とに応じて、表示モニタ75に第1立体画像又は第2立体画像を表示しても良い。これにより、表示装置70は、表示装置70本体の姿勢と第1立体視メガネ50の姿勢、又は、表示装置70本体の姿勢とユーザの顔の姿勢とを考慮して、より正確にユーザに被写体を立体視させることができる。
【0134】
或いは、表示装置70は、第4変形例と同様にして、表示制御部22eが立体画像の再生の際、第1立体画像と第2立体画像との何れかを、縦長と横長との何れかの表示態様で表示部に切り替え自在に表示させても良い。これにより、表示装置70は、第1立体視メガネ50の姿勢と横・縦位置撮影の組み合わせ、又は、ユーザの顔の姿勢と横・縦位置撮影の組み合わせを考慮して、ユーザに被写体を立体視させることができる。
【0135】
或いは、表示装置70は、第5変形例と同様にして、表示制御部22eが立体画像を動画再生しても良い。これにより、表示装置70は、3Dの動画再生の場合であっても、ユーザに被写体を立体視させることができる。
(上記実施形態の補足事項)
(1)上記実施形態では、偏光フィルタ方式の第1立体視メガネ50、アクティブシャッタ(時分割)方式の第2立体視メガネ60について説明したが、立体視メガネの方式は、上記の方式に限定されず、例えば、波長分割方式、カラーフィルタ方式等の立体視メガネを採用しても良い。
【0136】
(2)上記実施形態では、ユーザが裸眼で立体像を見る場合、パララックスバリア方式について説明したが、上記の方式に限定されず、例えばレンチキュラー方式、バックライトコントロール方式等の視差分割を採用しても良い。
【0137】
(3)上記実施形態では、2Dの静止画の画像ファイルとして、Exif形式を採用したが、上記の方式に限定されず、DCF(Design rule for Camera File system)に準拠した他の形式を採用しても良い。また、静止画の立体画像としては、一例としてマルチピクチャーフォーマットに準拠した形式であれば良く、動画の立体画像としては、一例として映像2チャンネル、ステレオ音声AVI(3D−AVI)であれば良い。
【0138】
(4)上記実施形態では、第1姿勢と第2姿勢とについて、一例として、ユーザが起立又は座っている状態で正面を向いている状態を第1姿勢とし、第1姿勢から時計回り(又は反時計回り)に略90度、横になっている状態を第2姿勢とした。ここで、第2姿勢は、略90度に限定されない。例えば、第1立体視メガネ50に、円偏光フィルタを採用して立体視できる角度を変更しても良い。具体的には、ユーザが第1姿勢の状態から時計回り(又は反時計回り)に略45度傾けた状態を第2姿勢としても良い。
【0139】
(5)上記実施形態では、電子カメラ2、3、4は同一の構成として説明した。ここで、例えば、電子カメラ2の撮影光学系2aの光軸L4と電子カメラ3の撮影光学系2bの光軸L5とが両眼視差の距離だけ離れており、電子カメラ3の撮影光学系2bの光軸L5と電子カメラ4の撮影光学系2cの光軸L6とが両眼視差の距離だけ離れている構成が保たれているのであれば、必ずしも、電子カメラ2、3、4は同一の構成としなくても良い。
【0140】
(6)上記実施形態において、表示装置70と従来(市販)の立体視カメラとを組み合わせて使用しても良い。この場合、顔認識部80eは、ユーザが従来の立体視カメラを装着した状態で顔認識をして、第1姿勢と第2姿勢との何れかを判定すれば良い。これにより、表示装置70は、従来の立体視カメラを用いても、顔認識部80eより認識された第1姿勢と第2姿勢とに応じて、ユーザに被写体を立体視させることができる。
【符号の説明】
【0141】
100、200・・・カメラシステム、300・・・表示システム、70・・・表示装置、80a・・・読込部、80b・・・立体画像生成部、80c・・・姿勢情報取得部、80d・・・表示制御部、1、2、3、4・・・電子カメラ、11a・・・第1撮像素子、11b・・・第2撮像素子、11c・・・第3撮像素子、22a・・・姿勢情報作成部、22b・・・記録処理部
【特許請求の範囲】
【請求項1】
画像を表示する表示部と、
第1姿勢での立体視用の第1立体画像を生成するための第1姿勢情報と第2姿勢での立体視用の第2立体画像を生成するための第2姿勢情報とが関連付けて記録されている、前記第1立体画像及び前記第2立体画像の元になる複数の画像を読み込む読込部と、
前記第1姿勢情報と前記第2姿勢情報とに基づいて、前記第1立体画像と前記第2立体画像とを複数の前記画像から各々生成する立体画像生成部と、
現在の姿勢を示す姿勢情報を取得する姿勢情報取得部と、
前記姿勢情報に基づいて前記第1姿勢と前記第2姿勢との何れかを判別し、判別結果に応じて、前記第1立体画像と前記第2立体画像との何れかを前記表示部に切り替え自在に表示させる表示制御部と
を備えることを特徴とする表示装置。
【請求項2】
画像を表示する表示部と、
第1姿勢での立体視用の第1立体画像と、第2姿勢での立体視用の第2立体画像とを読み込む読込部と、
現在の姿勢を示す姿勢情報を取得する姿勢情報取得部と、
前記姿勢情報に基づいて前記第1姿勢と前記第2姿勢との何れかを判別し、判別結果に応じて、前記第1立体画像と前記第2立体画像との何れかを前記表示部に切り替え自在に表示させる表示制御部と
を備えることを特徴とする表示装置。
【請求項3】
請求項1又は請求項2に記載の表示装置において、
表示装置本体の姿勢を検出する姿勢センサをさらに備え、
前記姿勢センサは、前記表示装置本体が前記第1姿勢と前記第2姿勢との何れかであるかを検出し、
前記姿勢情報取得部は、前記第1姿勢と前記第2姿勢との何れかを示す姿勢情報を前記姿勢センサから取得することを特徴とする表示装置。
【請求項4】
請求項1から請求項3の何れか1項に記載の表示装置において、
被写体光を撮像して画像を生成する撮像素子と、
前記画像から人物の顔を認識する顔認識部と、をさらに備え、
前記顔認識部は、前記顔が前記第1姿勢と前記第2姿勢との何れかであるかを認識し、
前記姿勢情報取得部は、前記第1姿勢と前記第2姿勢との何れかを示す姿勢情報を前記顔認識部から取得することを特徴とする表示装置。
【請求項5】
請求項1から請求項3の何れか1項に記載の表示装置において、
前記姿勢情報を送信する無線通信手段を備えた立体視メガネから、前記第1姿勢と前記第2姿勢との何れかを示す姿勢情報を受信する通信部をさらに備え、
前記姿勢情報取得部は、前記姿勢情報を前記通信部から取得することを特徴とする表示装置。
【請求項6】
請求項1から請求項5の何れか1項に記載の表示装置において、
前記第1姿勢情報及び第2姿勢情報には、撮影画像を横長に撮影した横位置撮影と撮影画像を縦長に撮影した縦位置撮影との何れかで撮影された撮影情報をさらに含み、
前記表示制御部は、前期撮影情報に応じて、前記第1立体画像と前記第2立体画像との何れかを、前記横長と前記縦長との何れかの表示態様で前記表示部に切り替え自在に表示させることを特徴とする表示装置。
【請求項7】
第1撮影光学系からの被写体光を撮像して第1画像を生成する第1撮像素子と、
第2撮影光学系からの前記被写体光を撮像して第2画像を生成する第2撮像素子と、
第3撮影光学系からの前記被写体光を撮像して第3画像を生成する第3撮像素子と、
前記第1画像と前記第2画像と前記第3画像とのうちから選択した2種類の画像に基づいて、第1姿勢での立体視用の第1立体画像を生成するための第1姿勢情報を作成すると共に、前記第1姿勢情報の作成の際に選択されなかった画像を含む2種類の画像に基づいて、第2姿勢での立体視用の第2立体画像を生成するための第2姿勢情報を作成する姿勢情報作成部と、
前記第1姿勢情報と前記第2姿勢情報とを各々対応する前記画像に関連付けてメモリに記録する記録処理部と
を備えることを特徴とする電子カメラ。
【請求項8】
請求項7に記載の電子カメラにおいて、
前記第1姿勢情報と前記第2姿勢情報とに基づいて、前記第1立体画像と前記第2立体画像とを複数の前記画像から各々生成する立体画像生成部と、
現在の姿勢を示す姿勢情報を取得する姿勢情報取得部と、
前記姿勢情報に基づいて前記第1姿勢と前記第2姿勢との何れかを判別し、判別結果に応じて、前記第1立体画像と前記第2立体画像との何れかを表示する表示部に切り替え自在に表示させる表示制御部と
をさらに備えることを特徴とする電子カメラ。
【請求項9】
請求項8に記載の電子カメラにおいて、
電子カメラ本体の姿勢を検出する姿勢センサをさらに備え、
前記姿勢センサは、前記電子カメラ本体が前記第1姿勢と前記第2姿勢との何れかであるかを検出し、
前記姿勢情報取得部は、前記第1姿勢と前記第2姿勢との何れかを示す姿勢情報を前記姿勢センサから取得することを特徴とする電子カメラ。
【請求項10】
請求項8又は請求項9に記載の電子カメラにおいて、
第4撮影光学系からの被写体光を撮像して第4画像を生成する第4撮像素子と、
前記第4画像から人物の顔を認識する顔認識部と、をさらに備え、
前記顔認識部は、前記顔が前記第1姿勢と前記第2姿勢との何れかであるかを認識し、
前記姿勢情報取得部は、前記第1姿勢と前記第2姿勢との何れかを示す姿勢情報を前記顔認識部から取得することを特徴とする電子カメラ。
【請求項11】
請求項8又は請求項9に記載の電子カメラにおいて、
前記姿勢情報を送信する無線通信手段を備えた立体視メガネから、前記第1姿勢と前記第2姿勢との何れかを示す姿勢情報を受信するカメラ側通信部をさらに備え、
前記姿勢情報取得部は、前記カメラ側通信部を介して前記姿勢情報を取得することを特徴とする電子カメラ。
【請求項12】
請求項7から請求項11の何れか1項に記載の電子カメラにおいて、
前記第1姿勢情報及び第2姿勢情報には、撮影画像を横長に撮影した横位置撮影と撮影画像を縦長に撮影した縦位置撮影との何れかで撮影された撮影情報をさらに含み、
前記表示制御部は、前期撮影情報に応じて、前記第1立体画像と前記第2立体画像との何れかを、前記横長と前記縦長との何れかの表示態様で前記表示部に切り替え自在に表示させることを特徴とする電子カメラ。
【請求項13】
請求項1から請求項3の何れか1項に記載の表示装置と、立体視用の立体視メガネとを備える表示システムであって、
前記立体視メガネが、
立体視メガネ本体の姿勢を検出するメガネ側姿勢センサと、
前記メガネ側姿勢センサの検出結果に基づいて、前記第1姿勢と前記第2姿勢との何れかを判定する姿勢情報判定部と、
前記姿勢情報判定部の判定結果を示す姿勢情報を前記表示装置に送信するメガネ側通信部と、を有し、
前記表示装置が、
前記メガネ側通信部から前記姿勢情報を受信する装置側通信部を有し、
前記姿勢情報取得部は、前記装置側通信部を介して前記姿勢情報を取得することを特徴とする表示システム。
【請求項14】
請求項8又は請求項9に記載の電子カメラと、立体視用の立体視メガネとを備えるカメラシステムであって、
前記立体視メガネが、
立体視メガネ本体の姿勢を検出するメガネ側姿勢センサと、
前記メガネ側姿勢センサの検出結果に基づいて、前記第1姿勢と前記第2姿勢との何れかを判定する姿勢情報判定部と、
前記姿勢情報判定部の判定結果を示す姿勢情報を前記電子カメラに送信するメガネ側通信部と、を有し、
前記電子カメラが、
前記メガネ側通信部から前記姿勢情報を受信するカメラ側通信部を有し、
前記姿勢情報取得部は、前記カメラ側通信部を介して前記姿勢情報を取得することを特徴とするカメラシステム。
【請求項1】
画像を表示する表示部と、
第1姿勢での立体視用の第1立体画像を生成するための第1姿勢情報と第2姿勢での立体視用の第2立体画像を生成するための第2姿勢情報とが関連付けて記録されている、前記第1立体画像及び前記第2立体画像の元になる複数の画像を読み込む読込部と、
前記第1姿勢情報と前記第2姿勢情報とに基づいて、前記第1立体画像と前記第2立体画像とを複数の前記画像から各々生成する立体画像生成部と、
現在の姿勢を示す姿勢情報を取得する姿勢情報取得部と、
前記姿勢情報に基づいて前記第1姿勢と前記第2姿勢との何れかを判別し、判別結果に応じて、前記第1立体画像と前記第2立体画像との何れかを前記表示部に切り替え自在に表示させる表示制御部と
を備えることを特徴とする表示装置。
【請求項2】
画像を表示する表示部と、
第1姿勢での立体視用の第1立体画像と、第2姿勢での立体視用の第2立体画像とを読み込む読込部と、
現在の姿勢を示す姿勢情報を取得する姿勢情報取得部と、
前記姿勢情報に基づいて前記第1姿勢と前記第2姿勢との何れかを判別し、判別結果に応じて、前記第1立体画像と前記第2立体画像との何れかを前記表示部に切り替え自在に表示させる表示制御部と
を備えることを特徴とする表示装置。
【請求項3】
請求項1又は請求項2に記載の表示装置において、
表示装置本体の姿勢を検出する姿勢センサをさらに備え、
前記姿勢センサは、前記表示装置本体が前記第1姿勢と前記第2姿勢との何れかであるかを検出し、
前記姿勢情報取得部は、前記第1姿勢と前記第2姿勢との何れかを示す姿勢情報を前記姿勢センサから取得することを特徴とする表示装置。
【請求項4】
請求項1から請求項3の何れか1項に記載の表示装置において、
被写体光を撮像して画像を生成する撮像素子と、
前記画像から人物の顔を認識する顔認識部と、をさらに備え、
前記顔認識部は、前記顔が前記第1姿勢と前記第2姿勢との何れかであるかを認識し、
前記姿勢情報取得部は、前記第1姿勢と前記第2姿勢との何れかを示す姿勢情報を前記顔認識部から取得することを特徴とする表示装置。
【請求項5】
請求項1から請求項3の何れか1項に記載の表示装置において、
前記姿勢情報を送信する無線通信手段を備えた立体視メガネから、前記第1姿勢と前記第2姿勢との何れかを示す姿勢情報を受信する通信部をさらに備え、
前記姿勢情報取得部は、前記姿勢情報を前記通信部から取得することを特徴とする表示装置。
【請求項6】
請求項1から請求項5の何れか1項に記載の表示装置において、
前記第1姿勢情報及び第2姿勢情報には、撮影画像を横長に撮影した横位置撮影と撮影画像を縦長に撮影した縦位置撮影との何れかで撮影された撮影情報をさらに含み、
前記表示制御部は、前期撮影情報に応じて、前記第1立体画像と前記第2立体画像との何れかを、前記横長と前記縦長との何れかの表示態様で前記表示部に切り替え自在に表示させることを特徴とする表示装置。
【請求項7】
第1撮影光学系からの被写体光を撮像して第1画像を生成する第1撮像素子と、
第2撮影光学系からの前記被写体光を撮像して第2画像を生成する第2撮像素子と、
第3撮影光学系からの前記被写体光を撮像して第3画像を生成する第3撮像素子と、
前記第1画像と前記第2画像と前記第3画像とのうちから選択した2種類の画像に基づいて、第1姿勢での立体視用の第1立体画像を生成するための第1姿勢情報を作成すると共に、前記第1姿勢情報の作成の際に選択されなかった画像を含む2種類の画像に基づいて、第2姿勢での立体視用の第2立体画像を生成するための第2姿勢情報を作成する姿勢情報作成部と、
前記第1姿勢情報と前記第2姿勢情報とを各々対応する前記画像に関連付けてメモリに記録する記録処理部と
を備えることを特徴とする電子カメラ。
【請求項8】
請求項7に記載の電子カメラにおいて、
前記第1姿勢情報と前記第2姿勢情報とに基づいて、前記第1立体画像と前記第2立体画像とを複数の前記画像から各々生成する立体画像生成部と、
現在の姿勢を示す姿勢情報を取得する姿勢情報取得部と、
前記姿勢情報に基づいて前記第1姿勢と前記第2姿勢との何れかを判別し、判別結果に応じて、前記第1立体画像と前記第2立体画像との何れかを表示する表示部に切り替え自在に表示させる表示制御部と
をさらに備えることを特徴とする電子カメラ。
【請求項9】
請求項8に記載の電子カメラにおいて、
電子カメラ本体の姿勢を検出する姿勢センサをさらに備え、
前記姿勢センサは、前記電子カメラ本体が前記第1姿勢と前記第2姿勢との何れかであるかを検出し、
前記姿勢情報取得部は、前記第1姿勢と前記第2姿勢との何れかを示す姿勢情報を前記姿勢センサから取得することを特徴とする電子カメラ。
【請求項10】
請求項8又は請求項9に記載の電子カメラにおいて、
第4撮影光学系からの被写体光を撮像して第4画像を生成する第4撮像素子と、
前記第4画像から人物の顔を認識する顔認識部と、をさらに備え、
前記顔認識部は、前記顔が前記第1姿勢と前記第2姿勢との何れかであるかを認識し、
前記姿勢情報取得部は、前記第1姿勢と前記第2姿勢との何れかを示す姿勢情報を前記顔認識部から取得することを特徴とする電子カメラ。
【請求項11】
請求項8又は請求項9に記載の電子カメラにおいて、
前記姿勢情報を送信する無線通信手段を備えた立体視メガネから、前記第1姿勢と前記第2姿勢との何れかを示す姿勢情報を受信するカメラ側通信部をさらに備え、
前記姿勢情報取得部は、前記カメラ側通信部を介して前記姿勢情報を取得することを特徴とする電子カメラ。
【請求項12】
請求項7から請求項11の何れか1項に記載の電子カメラにおいて、
前記第1姿勢情報及び第2姿勢情報には、撮影画像を横長に撮影した横位置撮影と撮影画像を縦長に撮影した縦位置撮影との何れかで撮影された撮影情報をさらに含み、
前記表示制御部は、前期撮影情報に応じて、前記第1立体画像と前記第2立体画像との何れかを、前記横長と前記縦長との何れかの表示態様で前記表示部に切り替え自在に表示させることを特徴とする電子カメラ。
【請求項13】
請求項1から請求項3の何れか1項に記載の表示装置と、立体視用の立体視メガネとを備える表示システムであって、
前記立体視メガネが、
立体視メガネ本体の姿勢を検出するメガネ側姿勢センサと、
前記メガネ側姿勢センサの検出結果に基づいて、前記第1姿勢と前記第2姿勢との何れかを判定する姿勢情報判定部と、
前記姿勢情報判定部の判定結果を示す姿勢情報を前記表示装置に送信するメガネ側通信部と、を有し、
前記表示装置が、
前記メガネ側通信部から前記姿勢情報を受信する装置側通信部を有し、
前記姿勢情報取得部は、前記装置側通信部を介して前記姿勢情報を取得することを特徴とする表示システム。
【請求項14】
請求項8又は請求項9に記載の電子カメラと、立体視用の立体視メガネとを備えるカメラシステムであって、
前記立体視メガネが、
立体視メガネ本体の姿勢を検出するメガネ側姿勢センサと、
前記メガネ側姿勢センサの検出結果に基づいて、前記第1姿勢と前記第2姿勢との何れかを判定する姿勢情報判定部と、
前記姿勢情報判定部の判定結果を示す姿勢情報を前記電子カメラに送信するメガネ側通信部と、を有し、
前記電子カメラが、
前記メガネ側通信部から前記姿勢情報を受信するカメラ側通信部を有し、
前記姿勢情報取得部は、前記カメラ側通信部を介して前記姿勢情報を取得することを特徴とするカメラシステム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【公開番号】特開2013−105139(P2013−105139A)
【公開日】平成25年5月30日(2013.5.30)
【国際特許分類】
【出願番号】特願2011−250606(P2011−250606)
【出願日】平成23年11月16日(2011.11.16)
【出願人】(000004112)株式会社ニコン (12,601)
【Fターム(参考)】
【公開日】平成25年5月30日(2013.5.30)
【国際特許分類】
【出願日】平成23年11月16日(2011.11.16)
【出願人】(000004112)株式会社ニコン (12,601)
【Fターム(参考)】
[ Back to top ]