
表示装置及び表示方法
【課題】照射領域のサイズが限られている場合であっても、指示地点までの進行方向を運
転者に示すことができる表示装置及び表示方法を提供する。
【解決手段】設定部は、運転者に指示すべき指示地点を設定する。判定部は、乗り物が指
示地点に接近した場合、指示地点を示すべき指標画像を表示領域内に表示することが可能
であるか否かを判定する。生成部は、表示することが可能である場合は、指示地点まで向
かって移動する指標画像を生成し、表示することが可能でない場合は、指標画像に付帯す
る付帯画像であって、表示領域外で指標画像が示しているであろう位置を、運転者に認識
させるための付帯画像を生成する。
転者に示すことができる表示装置及び表示方法を提供する。
【解決手段】設定部は、運転者に指示すべき指示地点を設定する。判定部は、乗り物が指
示地点に接近した場合、指示地点を示すべき指標画像を表示領域内に表示することが可能
であるか否かを判定する。生成部は、表示することが可能である場合は、指示地点まで向
かって移動する指標画像を生成し、表示することが可能でない場合は、指標画像に付帯す
る付帯画像であって、表示領域外で指標画像が示しているであろう位置を、運転者に認識
させるための付帯画像を生成する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明の実施形態は、表示装置及び表示方法に関する。
【背景技術】
【0002】
自動車に装備される表示装置であって、運転者(観察者)に指示すべき指示地点までの
進行方向を示す指標画像を生成し、運転者が視認している前方の風景に重畳するように、
指標画像を運転者の眼に向かって表示する表示装置(例えばヘッドアップディスプレイ)
がある。
【0003】
このような表示装置では、自動車のフロントガラスに向かって指標画像の光束を照射す
ることにより、運転者は、視認している前方の風景に重畳した指標画像を観察する。
【0004】
しかしながら、このような表示装置では、指標画像の光束を照射することができるフロ
ントガラスの照射領域のサイズが限られているため、指示地点までの進行方向を運転者に
示すことができない場合があるという課題がある。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2005−215879号公報
【特許文献2】特開2010−76524号公報
【特許文献3】特開平10−293264号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
発明が解決しようとする課題は、照射領域のサイズが限られている場合であっても、指
示地点までの進行方向を運転者に示すことができる表示装置及び表示方法を提供すること
である。
【課題を解決するための手段】
【0007】
上記課題を解決するために、本発明の実施形態に係る表示装置は、乗り物に装備され、
前記乗り物に設けられた表示領域に画像を表示する表示装置であって、設定部と、判定部
と、生成部とを備える。
【0008】
設定部は、運転者に指示すべき指示地点を設定する。判定部は、前記乗り物が前記指示
地点に接近した場合、前記指示地点を示すべき指標画像を前記表示領域内に表示すること
が可能であるか否かを判定する。生成部は、表示することが可能である場合は、前記指示
地点まで向かって移動する前記指標画像を生成し、表示することが可能でない場合は、前
記指標画像に付帯する付帯画像であって、前記表示領域外で前記指標画像が示しているで
あろう位置を、前記運転者に認識させるための前記付帯画像を生成する。
【図面の簡単な説明】
【0009】
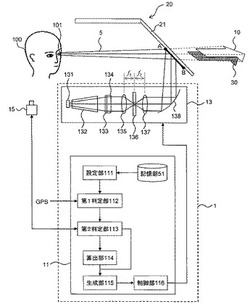
【図1】第1の実施形態に係る表示装置1を表すブロック図。
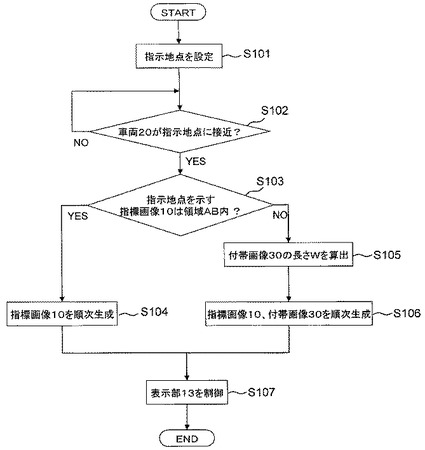
【図2】表示装置1の処理を表すフローチャート。
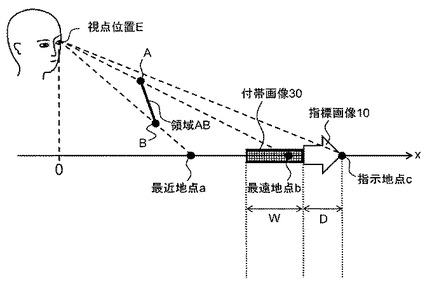
【図3】算出部114による付帯画像30の長さWの算出の説明図。
【図4】指標画像10及び付帯画像30を表す一例図。
【図5】算出部114による付帯画像30の長さWの算出の説明図。
【図6】指標画像10と付帯画像30と付帯画像40とを表す一例図。
【発明を実施するための形態】
【0010】
以下、本発明の実施形態について図面を参照して詳細に説明する。
【0011】
本願明細書と各図において、既出の図に関して前述したものと同様の要素には同一の符号
を付して詳細な説明は適宜省略する。
【0012】
(第1の実施形態)
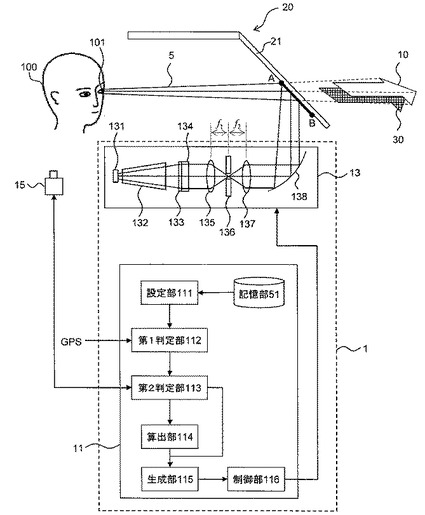
表示装置1は、指標画像10を含んだ光束5を、車両20のフロントガラス21に照射
する。フロントガラス21には、光束5の少なくとも一部を反射可能な領域AB(表示領
域)が設けられており、表示装置1は、当該領域ABに向けて、光束5を照射する。領域
ABからの反射光が運転者(観察者)100の眼101(片眼でも両眼でもよい)に届く
ように、表示装置1は、光束5の照射方向を制御して表示する。これにより、運転者10
0は、指標画像10をフロントガラス21より前方の風景に重畳された像として認識する
ことができる。
【0013】
表示装置1は、運転者100に指示する地点(以下、指示地点)までの距離が所定距離
以内となったとき(以下、開始地点)から、指標画像10の表示を開始する。指示地点と
は、運転者100に案内や注意を促す場面、例えば、右折や左折をする必要がある交差点
等である。
【0014】
表示装置1は、開始地点から指示地点までの間、指標画像10が当該表示の開始地点か
ら、指示地点まで進んでいくよう運転者100に認識されるように、指標画像10を順次
生成し、表示する。
【0015】
従来、指示地点を示す指標画像10を照射すべき位置が、領域AB外の領域を超えてし
まい、実際に指標画像10を表示することができない場合がある。
【0016】
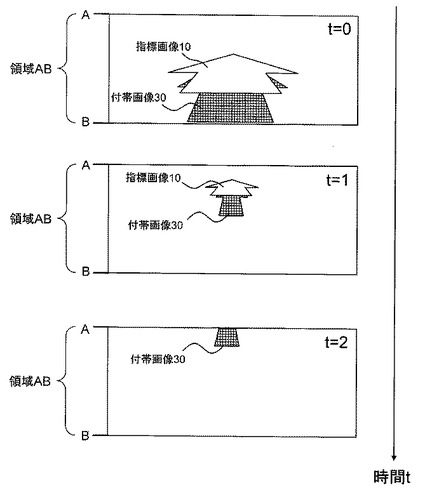
このような場合、表示装置1は、領域AB内に、指標画像10に付帯する付帯画像30
を生成して照射する。例えば、表示装置1は、付帯画像30の一例として指標画像10の
影を、指標画像10よりも運転者100側(後方)の位置で、かつ、指標画像10よりも
下側の位置(たとえば、路面上)に表示してよい。
【0017】
このとき、運転者100からは領域AB外にある指標画像10を視認できないが、領域
AB内にある付帯画像30を視認できるため、この付帯画像30の動きや位置から、領域
AB外において(視認できない)指標画像10が示しているであろう位置を運転者100
が推測して認識可能となる。
【0018】
これにより、光束5の照射可能な領域ABのサイズが限られている場合であっても、指
示地点までの進行方向を運転者に示すことができる。
【0019】
図1に示すように、表示装置1は、処理部11と、表示部13とを備える。処理部11
は、設定部111と、第1判定部112と、第2判定部113と、算出部114と、生成
部115と、制御部116と、記憶部51とを含む。
【0020】
記憶部51は、地図情報(例えば道路地図)を記憶している。
【0021】
設定部111は、運転者100により目的地が指定されると、記憶部51から地図情報
を読み出し、目的地までの経路を設定する。設定部111は、当該経路中における指標画
像10を表示すべき少なくとも1つの指示地点を設定する。
【0022】
第1判定部112は、設定された指示地点の位置情報を保持し、車両20の現在位置か
ら、車両20が指示地点に接近したか否かを判定する。第1判定部112は、図示しない
位置測定手段(例えば、GPS)から、車両20の現在位置を獲得してよい。
【0023】
第2判定部113は、運転者100の眼101の位置(視点位置)を検出するための検
出装置15(カメラやセンサ等)から視点位置を取得する。
【0024】
第2判定部113は、取得した視点位置から観察した場合に、指示地点を示す指標画像
10が領域AB内に入るか否かを判定する。例えば、第2判定部113は、指標10が指
示すべき指示地点が、領域AB内で指標10が指示可能である経路上の最も遠い地点(最
遠地点b)より遠方側にあるか否かを判定する。
【0025】
指示地点を示すべき指標画像10が領域AB内に入ると判定された場合、生成部115
は、指示地点cまで移動する各時刻の指標画像10を順次生成する。
【0026】
指示地点を示すべき指標画像10が領域AB内に入らないと判定された場合、算出部1
14は、指示地点cと、最遠地点bと、領域AB内で指標10が指示可能である経路上の
最も近い地点(最近地点a)と、予め設定されている指示画像10の進行方向の長さDと
に基づいて、付帯画像30の進行方向の長さWを算出する。なお、指示地点cと、最遠地
点bと、最近地点aとは、例えば運転者100の位置を基準とした座標により示されてよ
い。
【0027】
生成部115は、領域AB内に表示可能な部分の指標画像10(例えば、先端が欠けた
指標画像10)及び付帯画像30を、指示地点まで向かって移動するように順次生成する
。
【0028】
制御部116は、生成された指示画像10と、付帯画像30とを表示部13が表示する
よう、表示部13を制御する。
【0029】
設定部111と、第1判定部112と、第2判定部113と、算出部114と、生成部
115と、制御部116とは、中央演算処理装置(CPU)、及びCPUが用いるメモリ
により実現されてよい。記憶部51は、CPUが用いるメモリや補助記憶装置により実現
されてよい。
【0030】
以上、処理部11について説明した。
【0031】
表示部13は、制御部116の制御に基づき、指標画像10を含んだ光束5を、領域A
Bに向けて光束5を照射させ、光束5を運転者100の眼101に向かって表示する。フ
ロントガラス21と表示部13の間には、領域ABに相当するコンバイナが設けられてい
てもよい。フロントガラス21は、光束5を運転者100の眼101に向かって反射させ
る。
【0032】
表示部13は、光源131と、制限部132と、拡散部133と、画像形成部134と
、第1のレンズ135と、開口部136と、第2のレンズ137と、反射板138とを含
む。
【0033】
第1のレンズ135の焦点距離をf1、第2のレンズ137の焦点距離をf2とすると
、開口部136は、第1のレンズ135からf1の距離で、かつ第2のレンズ137から
f2の距離の位置に設置されている。
【0034】
光源131から出射した光束5は、制限部132で、進行方向が制限された状態で、拡
散部133を備えた画像形成部134へと入射する。拡散部133により、光束5は拡散
されて一様に画像形成部134へと入射することができる。画像形成部134は、光束5
を部分的に透過もしくは遮断することにより、指標画像10の形状をした光束5を形成す
る。
【0035】
画像形成部134を通った光束5は、第1のレンズ135と開口部136と第2のレン
ズ137を通過する。光束5は発散角(光束5が拡がっていく角度)が制御された状態で
反射板138へと入射する。反射板138は、光束5をフロントガラス21に向けて反射
させる。
【0036】
画像形成部134が開口部136よりも光源131側にあることにより、開口部136
が画像形成部134よりも光源131側にある場合に比べて、画像形成部134を通る光
束5の透過率を高くすることができる。そのため、光源131の消費電力を抑えられる。
【0037】
光源131には発光ダイオードや高圧水銀ランプ、ハロゲンランプ、レーザー等が用い
られる。制限部132にはテーパライトガイド、拡散部133には拡散フィルターや拡散
板、画像形成部134には液晶ディスプレイやデジタルミラーデバイス等が用いられる。
【0038】
以上、表示装置1の構成について説明した。
【0039】
図2は、表示装置1の処理を表すフローチャートである。
【0040】
設定部111は、運転者100により目的地が指定されると、記憶部51から地図情報
を読み出し、目的地までの経路を設定し、当該経路中における指標画像10を表示すべき
少なくとも1つの指示地点を設定する(S101)。
【0041】
第1判定部112は、車両20の現在位置から、車両20が指示地点に接近したか否か
を判定する(S102)。
【0042】
第2判定部113は、運転者100の視点位置から観察した場合に、指示地点を示す指
標画像10が領域AB内に入るか否かを判定する(S103)。例えば、第2判定部11
3は、指標10が指示すべき指示地点cと最遠地点bとが、式1を満たすか否かを判定し
てよい。
【数1】

【0043】
指標画像10が領域AB内に入ると判定された場合(ステップS104:YES)、生
成部115は、指示地点cを指し示す指標画像10を生成する(S105)。
【0044】
指標画像10が領域AB内に入らないと判定された場合(ステップS104:NO)、
算出部114は、指示地点cと、最遠地点bと、最近地点aと、指示画像10の進行方向
の長さDとに基づいて、付帯画像30の進行方向の長さWを算出する(S105)。
【0045】
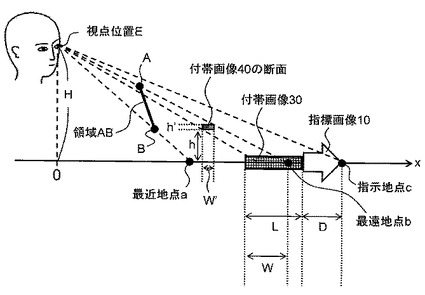
図3は、算出部114による付帯画像30の長さWの算出の説明図である。図3に示す
ように、運転者100の視点位置Eを原点とし、運転者100より前方方向(車両20の
進行方向)の路面上にx軸を設定する。
【0046】
ここで、視点位置Eと領域ABの点Bを結ぶ直線がx軸と交差する点が、最近地点aで
ある。視点位置Eと領域ABの点Aを結ぶ直線がx軸と交差する点が、最遠地点bである
。指標画像10が指示していると運転者100が認識する地点が、指示地点cである(本
例では、矢印の先端)。なお、指示地点cは、指示地点も意味するものとする。このとき
、算出部114は、式2を用いて、付帯画像30の長さWを算出してよい。
【数2】
【0047】
すなわち、算出部114は、付帯画像30の手前側の末端が、領域AB内に収まるよう
に、付帯画像30の長さWを算出する。
【0048】
生成部115は、領域AB内に表示可能な部分の指標画像10及び付帯画像30を順次
生成する(S106)。
【0049】
制御部116は、生成された指示画像10(ステップS104がYESの場合)、ある
いは、指示画像10の一部及び付帯画像30(ステップS104がNOの場合)を表示部
13が順次表示するよう、表示部13を制御し(S107)、処理を終了する。
【0050】
図4は、順次生成される指標画像10及び付帯画像30を表す一例図である。図4に示
すように、上述した処理により、時間毎(例えば、t=0、t=1、t=2)に移動する
指標画像10及び付帯画像30が順次生成されることにより、光束5の照射可能な領域A
Bのサイズが限られている場合であっても、指示地点までの進行方向を運転者に示すこと
ができる。
【0051】
以上、表示装置1の処理について説明した。
【0052】
本実施形態では、付帯画像30として、指標画像10の影の例を説明したが、これに限
られない。例えば、指標画像10の移動に伴って移動し、指標画像10よりも彩度や明度
が低い画像を付帯画像30として表示してもよい。
【0053】
あるいは、指標画像10の輝度を落とした画像を付帯画像30としてもよい。あるいは
、ブラーなどの効果を用いてもよい。付帯画像30が影の場合、算出部114は、指示地
点cまでの距離に応じて、付帯画像30の長さWを算出してもよい。例えば、指示地点c
までの距離が遠い場合は、式2の範囲において付帯画像30の長さWを長くし、指示地点
cまでの距離が近い場合は、式2の範囲において付帯画像30の長さWを短く算出しても
よい。これにより、付帯画像30が表示される時間を制御することが可能である。あるい
は、付帯画像30が指標画像10と同じ向きに進んでいれば、付帯画像30の速度を低下
させたり、指標画像10と付帯画像30との距離を離したりすることにより、付帯画像3
0が表示される時間を制御してもよい。なお、路面の高さ変化が起こる場合や、車両20
が、カーブを走行中の場合も同様である。
【0054】
本実施形態によれば、照射領域のサイズが限られている場合であっても、指示地点まで
の進行方向を運転者に示すことができる。
【0055】
なお、本実施形態では、自動車である車両20を例として説明したが、これに限られな
い。例えば、航空機や電車等、運転者が操縦する乗り物に対しても、表示装置1を用いる
ことができる。
【0056】
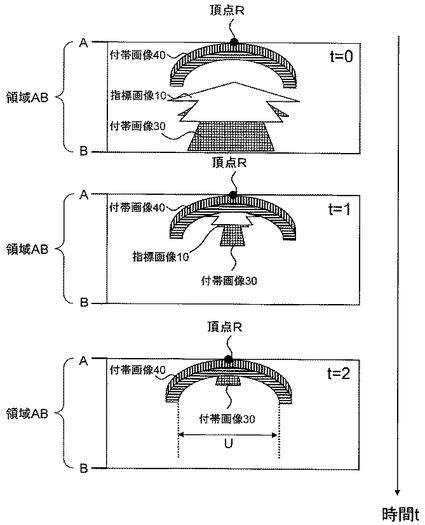
(第2の実施形態)
第2の実施形態では、算出部114が、指標画像10が通り抜けるようなトンネル形状
の付帯画像40をさらに生成する点が、前実施形態と異なる。これにより、指標画像10
が領域ABを超える際に、突然消失して運転者100に観察されることを防ぐことができ
る。付帯画像40は、進行方向に幅を有し、路面から高さを有する仕切りを表す画像であ
ればよい。
【0057】
図5は、本実施形態における算出部114による付帯画像30の長さLの算出の説明図
である。図5に示すように、付帯画像40の幅をW’、付帯画像40の路面(x軸)から
の高さをh、付帯画像40の高さ方向の厚みをh’運転手100の視点位置Eの路面から
の高さをHとする。なお、算出部114は、検出装置15から視点位置Eを取得し、視点
位置Eの高さHを算出してよい。
【0058】
頂点Rが領域ABの上辺の上に重なる場合、付帯画像40の幅W’と厚みh’との関係
は、付帯画像40の高さhと、視点位置Eの高さHと、最遠位置bを用いて、式3により
表わされる。
【数3】
【0059】
h’又はW’のいずれかを設定すれば付帯画像40の頂点Rの位置を決定できる。算出
部114は、頂点Rの位置を決定し、指標画像10の横幅の最大値Uを設定する。算出部
114は、指標画像30の長さLを式4を用いて、付帯画像30の長さLを算出してよい
。
【数4】
【0060】
なお、算出部114は、領域ABの上辺の上に重なるように頂点Rの位置を決定するの
が望ましい。
【0061】
生成部115は、付帯画像40を生成するとともに、領域AB内に表示可能な部分の指
標画像10(例えば、先端が欠けた指標画像10)と、付帯画像30と指示地点まで向か
って移動するように順次生成する。
【0062】
図6は、付帯画像40と、順次生成される指標画像10と付帯画像30とを表す一例図
である。図6に示すように、本実施形態によれば、付帯画像40と、時間毎(例えば、t
=0、t=1、t=2)に移動する指標画像10及び付帯画像30が順次生成されること
により、光束5の照射可能な領域ABのサイズが限られている場合であっても、指示地点
までの進行方向を運転者に示すことができる。また、指標画像10が領域ABを超える際
に、突然消失して運転者100に観察されることを防ぐことができる。
【0063】
以上、上述した実施の形態によれば、照射領域のサイズが限られている場合であっても
、指示地点までの進行方向を運転者に示すことができる。
【0064】
これまで、本発明のいくつかの実施形態を説明したが、これらの実施形態は、例として
表示したものであり、発明の範囲を限定することは意図していない。これら新規な実施形
態は、その他の様々な形態で実施されることが可能であり、発明の要旨を逸脱しない範囲
で、種々の省略、置き換え、変更を行うことができる。これら実施形態やその変形は、発
明の範囲や要旨に含まれるとともに、特許請求の範囲に記載された発明とその均等の範囲
に含まれる。
【符号の説明】
【0065】
1 表示装置
5 光束
10 指標画像
11 処理部
13 表示部
15 検出装置
16 検知センサ
20 車両
21 フロントガラス
30,40 付帯画像
100 観察者
101 眼
111 設定部
112 第1判定部
113 第2判定部
114 算出部
115 生成部
116 制御部
131 光源
132 制限部
133 拡散部
134 画像形成部
135 第1のレンズ
136 開口部
137 第2のレンズ
138 反射板
【技術分野】
【0001】
本発明の実施形態は、表示装置及び表示方法に関する。
【背景技術】
【0002】
自動車に装備される表示装置であって、運転者(観察者)に指示すべき指示地点までの
進行方向を示す指標画像を生成し、運転者が視認している前方の風景に重畳するように、
指標画像を運転者の眼に向かって表示する表示装置(例えばヘッドアップディスプレイ)
がある。
【0003】
このような表示装置では、自動車のフロントガラスに向かって指標画像の光束を照射す
ることにより、運転者は、視認している前方の風景に重畳した指標画像を観察する。
【0004】
しかしながら、このような表示装置では、指標画像の光束を照射することができるフロ
ントガラスの照射領域のサイズが限られているため、指示地点までの進行方向を運転者に
示すことができない場合があるという課題がある。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2005−215879号公報
【特許文献2】特開2010−76524号公報
【特許文献3】特開平10−293264号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
発明が解決しようとする課題は、照射領域のサイズが限られている場合であっても、指
示地点までの進行方向を運転者に示すことができる表示装置及び表示方法を提供すること
である。
【課題を解決するための手段】
【0007】
上記課題を解決するために、本発明の実施形態に係る表示装置は、乗り物に装備され、
前記乗り物に設けられた表示領域に画像を表示する表示装置であって、設定部と、判定部
と、生成部とを備える。
【0008】
設定部は、運転者に指示すべき指示地点を設定する。判定部は、前記乗り物が前記指示
地点に接近した場合、前記指示地点を示すべき指標画像を前記表示領域内に表示すること
が可能であるか否かを判定する。生成部は、表示することが可能である場合は、前記指示
地点まで向かって移動する前記指標画像を生成し、表示することが可能でない場合は、前
記指標画像に付帯する付帯画像であって、前記表示領域外で前記指標画像が示しているで
あろう位置を、前記運転者に認識させるための前記付帯画像を生成する。
【図面の簡単な説明】
【0009】
【図1】第1の実施形態に係る表示装置1を表すブロック図。
【図2】表示装置1の処理を表すフローチャート。
【図3】算出部114による付帯画像30の長さWの算出の説明図。
【図4】指標画像10及び付帯画像30を表す一例図。
【図5】算出部114による付帯画像30の長さWの算出の説明図。
【図6】指標画像10と付帯画像30と付帯画像40とを表す一例図。
【発明を実施するための形態】
【0010】
以下、本発明の実施形態について図面を参照して詳細に説明する。
【0011】
本願明細書と各図において、既出の図に関して前述したものと同様の要素には同一の符号
を付して詳細な説明は適宜省略する。
【0012】
(第1の実施形態)
表示装置1は、指標画像10を含んだ光束5を、車両20のフロントガラス21に照射
する。フロントガラス21には、光束5の少なくとも一部を反射可能な領域AB(表示領
域)が設けられており、表示装置1は、当該領域ABに向けて、光束5を照射する。領域
ABからの反射光が運転者(観察者)100の眼101(片眼でも両眼でもよい)に届く
ように、表示装置1は、光束5の照射方向を制御して表示する。これにより、運転者10
0は、指標画像10をフロントガラス21より前方の風景に重畳された像として認識する
ことができる。
【0013】
表示装置1は、運転者100に指示する地点(以下、指示地点)までの距離が所定距離
以内となったとき(以下、開始地点)から、指標画像10の表示を開始する。指示地点と
は、運転者100に案内や注意を促す場面、例えば、右折や左折をする必要がある交差点
等である。
【0014】
表示装置1は、開始地点から指示地点までの間、指標画像10が当該表示の開始地点か
ら、指示地点まで進んでいくよう運転者100に認識されるように、指標画像10を順次
生成し、表示する。
【0015】
従来、指示地点を示す指標画像10を照射すべき位置が、領域AB外の領域を超えてし
まい、実際に指標画像10を表示することができない場合がある。
【0016】
このような場合、表示装置1は、領域AB内に、指標画像10に付帯する付帯画像30
を生成して照射する。例えば、表示装置1は、付帯画像30の一例として指標画像10の
影を、指標画像10よりも運転者100側(後方)の位置で、かつ、指標画像10よりも
下側の位置(たとえば、路面上)に表示してよい。
【0017】
このとき、運転者100からは領域AB外にある指標画像10を視認できないが、領域
AB内にある付帯画像30を視認できるため、この付帯画像30の動きや位置から、領域
AB外において(視認できない)指標画像10が示しているであろう位置を運転者100
が推測して認識可能となる。
【0018】
これにより、光束5の照射可能な領域ABのサイズが限られている場合であっても、指
示地点までの進行方向を運転者に示すことができる。
【0019】
図1に示すように、表示装置1は、処理部11と、表示部13とを備える。処理部11
は、設定部111と、第1判定部112と、第2判定部113と、算出部114と、生成
部115と、制御部116と、記憶部51とを含む。
【0020】
記憶部51は、地図情報(例えば道路地図)を記憶している。
【0021】
設定部111は、運転者100により目的地が指定されると、記憶部51から地図情報
を読み出し、目的地までの経路を設定する。設定部111は、当該経路中における指標画
像10を表示すべき少なくとも1つの指示地点を設定する。
【0022】
第1判定部112は、設定された指示地点の位置情報を保持し、車両20の現在位置か
ら、車両20が指示地点に接近したか否かを判定する。第1判定部112は、図示しない
位置測定手段(例えば、GPS)から、車両20の現在位置を獲得してよい。
【0023】
第2判定部113は、運転者100の眼101の位置(視点位置)を検出するための検
出装置15(カメラやセンサ等)から視点位置を取得する。
【0024】
第2判定部113は、取得した視点位置から観察した場合に、指示地点を示す指標画像
10が領域AB内に入るか否かを判定する。例えば、第2判定部113は、指標10が指
示すべき指示地点が、領域AB内で指標10が指示可能である経路上の最も遠い地点(最
遠地点b)より遠方側にあるか否かを判定する。
【0025】
指示地点を示すべき指標画像10が領域AB内に入ると判定された場合、生成部115
は、指示地点cまで移動する各時刻の指標画像10を順次生成する。
【0026】
指示地点を示すべき指標画像10が領域AB内に入らないと判定された場合、算出部1
14は、指示地点cと、最遠地点bと、領域AB内で指標10が指示可能である経路上の
最も近い地点(最近地点a)と、予め設定されている指示画像10の進行方向の長さDと
に基づいて、付帯画像30の進行方向の長さWを算出する。なお、指示地点cと、最遠地
点bと、最近地点aとは、例えば運転者100の位置を基準とした座標により示されてよ
い。
【0027】
生成部115は、領域AB内に表示可能な部分の指標画像10(例えば、先端が欠けた
指標画像10)及び付帯画像30を、指示地点まで向かって移動するように順次生成する
。
【0028】
制御部116は、生成された指示画像10と、付帯画像30とを表示部13が表示する
よう、表示部13を制御する。
【0029】
設定部111と、第1判定部112と、第2判定部113と、算出部114と、生成部
115と、制御部116とは、中央演算処理装置(CPU)、及びCPUが用いるメモリ
により実現されてよい。記憶部51は、CPUが用いるメモリや補助記憶装置により実現
されてよい。
【0030】
以上、処理部11について説明した。
【0031】
表示部13は、制御部116の制御に基づき、指標画像10を含んだ光束5を、領域A
Bに向けて光束5を照射させ、光束5を運転者100の眼101に向かって表示する。フ
ロントガラス21と表示部13の間には、領域ABに相当するコンバイナが設けられてい
てもよい。フロントガラス21は、光束5を運転者100の眼101に向かって反射させ
る。
【0032】
表示部13は、光源131と、制限部132と、拡散部133と、画像形成部134と
、第1のレンズ135と、開口部136と、第2のレンズ137と、反射板138とを含
む。
【0033】
第1のレンズ135の焦点距離をf1、第2のレンズ137の焦点距離をf2とすると
、開口部136は、第1のレンズ135からf1の距離で、かつ第2のレンズ137から
f2の距離の位置に設置されている。
【0034】
光源131から出射した光束5は、制限部132で、進行方向が制限された状態で、拡
散部133を備えた画像形成部134へと入射する。拡散部133により、光束5は拡散
されて一様に画像形成部134へと入射することができる。画像形成部134は、光束5
を部分的に透過もしくは遮断することにより、指標画像10の形状をした光束5を形成す
る。
【0035】
画像形成部134を通った光束5は、第1のレンズ135と開口部136と第2のレン
ズ137を通過する。光束5は発散角(光束5が拡がっていく角度)が制御された状態で
反射板138へと入射する。反射板138は、光束5をフロントガラス21に向けて反射
させる。
【0036】
画像形成部134が開口部136よりも光源131側にあることにより、開口部136
が画像形成部134よりも光源131側にある場合に比べて、画像形成部134を通る光
束5の透過率を高くすることができる。そのため、光源131の消費電力を抑えられる。
【0037】
光源131には発光ダイオードや高圧水銀ランプ、ハロゲンランプ、レーザー等が用い
られる。制限部132にはテーパライトガイド、拡散部133には拡散フィルターや拡散
板、画像形成部134には液晶ディスプレイやデジタルミラーデバイス等が用いられる。
【0038】
以上、表示装置1の構成について説明した。
【0039】
図2は、表示装置1の処理を表すフローチャートである。
【0040】
設定部111は、運転者100により目的地が指定されると、記憶部51から地図情報
を読み出し、目的地までの経路を設定し、当該経路中における指標画像10を表示すべき
少なくとも1つの指示地点を設定する(S101)。
【0041】
第1判定部112は、車両20の現在位置から、車両20が指示地点に接近したか否か
を判定する(S102)。
【0042】
第2判定部113は、運転者100の視点位置から観察した場合に、指示地点を示す指
標画像10が領域AB内に入るか否かを判定する(S103)。例えば、第2判定部11
3は、指標10が指示すべき指示地点cと最遠地点bとが、式1を満たすか否かを判定し
てよい。
【数1】
【0043】
指標画像10が領域AB内に入ると判定された場合(ステップS104:YES)、生
成部115は、指示地点cを指し示す指標画像10を生成する(S105)。
【0044】
指標画像10が領域AB内に入らないと判定された場合(ステップS104:NO)、
算出部114は、指示地点cと、最遠地点bと、最近地点aと、指示画像10の進行方向
の長さDとに基づいて、付帯画像30の進行方向の長さWを算出する(S105)。
【0045】
図3は、算出部114による付帯画像30の長さWの算出の説明図である。図3に示す
ように、運転者100の視点位置Eを原点とし、運転者100より前方方向(車両20の
進行方向)の路面上にx軸を設定する。
【0046】
ここで、視点位置Eと領域ABの点Bを結ぶ直線がx軸と交差する点が、最近地点aで
ある。視点位置Eと領域ABの点Aを結ぶ直線がx軸と交差する点が、最遠地点bである
。指標画像10が指示していると運転者100が認識する地点が、指示地点cである(本
例では、矢印の先端)。なお、指示地点cは、指示地点も意味するものとする。このとき
、算出部114は、式2を用いて、付帯画像30の長さWを算出してよい。
【数2】
【0047】
すなわち、算出部114は、付帯画像30の手前側の末端が、領域AB内に収まるよう
に、付帯画像30の長さWを算出する。
【0048】
生成部115は、領域AB内に表示可能な部分の指標画像10及び付帯画像30を順次
生成する(S106)。
【0049】
制御部116は、生成された指示画像10(ステップS104がYESの場合)、ある
いは、指示画像10の一部及び付帯画像30(ステップS104がNOの場合)を表示部
13が順次表示するよう、表示部13を制御し(S107)、処理を終了する。
【0050】
図4は、順次生成される指標画像10及び付帯画像30を表す一例図である。図4に示
すように、上述した処理により、時間毎(例えば、t=0、t=1、t=2)に移動する
指標画像10及び付帯画像30が順次生成されることにより、光束5の照射可能な領域A
Bのサイズが限られている場合であっても、指示地点までの進行方向を運転者に示すこと
ができる。
【0051】
以上、表示装置1の処理について説明した。
【0052】
本実施形態では、付帯画像30として、指標画像10の影の例を説明したが、これに限
られない。例えば、指標画像10の移動に伴って移動し、指標画像10よりも彩度や明度
が低い画像を付帯画像30として表示してもよい。
【0053】
あるいは、指標画像10の輝度を落とした画像を付帯画像30としてもよい。あるいは
、ブラーなどの効果を用いてもよい。付帯画像30が影の場合、算出部114は、指示地
点cまでの距離に応じて、付帯画像30の長さWを算出してもよい。例えば、指示地点c
までの距離が遠い場合は、式2の範囲において付帯画像30の長さWを長くし、指示地点
cまでの距離が近い場合は、式2の範囲において付帯画像30の長さWを短く算出しても
よい。これにより、付帯画像30が表示される時間を制御することが可能である。あるい
は、付帯画像30が指標画像10と同じ向きに進んでいれば、付帯画像30の速度を低下
させたり、指標画像10と付帯画像30との距離を離したりすることにより、付帯画像3
0が表示される時間を制御してもよい。なお、路面の高さ変化が起こる場合や、車両20
が、カーブを走行中の場合も同様である。
【0054】
本実施形態によれば、照射領域のサイズが限られている場合であっても、指示地点まで
の進行方向を運転者に示すことができる。
【0055】
なお、本実施形態では、自動車である車両20を例として説明したが、これに限られな
い。例えば、航空機や電車等、運転者が操縦する乗り物に対しても、表示装置1を用いる
ことができる。
【0056】
(第2の実施形態)
第2の実施形態では、算出部114が、指標画像10が通り抜けるようなトンネル形状
の付帯画像40をさらに生成する点が、前実施形態と異なる。これにより、指標画像10
が領域ABを超える際に、突然消失して運転者100に観察されることを防ぐことができ
る。付帯画像40は、進行方向に幅を有し、路面から高さを有する仕切りを表す画像であ
ればよい。
【0057】
図5は、本実施形態における算出部114による付帯画像30の長さLの算出の説明図
である。図5に示すように、付帯画像40の幅をW’、付帯画像40の路面(x軸)から
の高さをh、付帯画像40の高さ方向の厚みをh’運転手100の視点位置Eの路面から
の高さをHとする。なお、算出部114は、検出装置15から視点位置Eを取得し、視点
位置Eの高さHを算出してよい。
【0058】
頂点Rが領域ABの上辺の上に重なる場合、付帯画像40の幅W’と厚みh’との関係
は、付帯画像40の高さhと、視点位置Eの高さHと、最遠位置bを用いて、式3により
表わされる。
【数3】
【0059】
h’又はW’のいずれかを設定すれば付帯画像40の頂点Rの位置を決定できる。算出
部114は、頂点Rの位置を決定し、指標画像10の横幅の最大値Uを設定する。算出部
114は、指標画像30の長さLを式4を用いて、付帯画像30の長さLを算出してよい
。
【数4】
【0060】
なお、算出部114は、領域ABの上辺の上に重なるように頂点Rの位置を決定するの
が望ましい。
【0061】
生成部115は、付帯画像40を生成するとともに、領域AB内に表示可能な部分の指
標画像10(例えば、先端が欠けた指標画像10)と、付帯画像30と指示地点まで向か
って移動するように順次生成する。
【0062】
図6は、付帯画像40と、順次生成される指標画像10と付帯画像30とを表す一例図
である。図6に示すように、本実施形態によれば、付帯画像40と、時間毎(例えば、t
=0、t=1、t=2)に移動する指標画像10及び付帯画像30が順次生成されること
により、光束5の照射可能な領域ABのサイズが限られている場合であっても、指示地点
までの進行方向を運転者に示すことができる。また、指標画像10が領域ABを超える際
に、突然消失して運転者100に観察されることを防ぐことができる。
【0063】
以上、上述した実施の形態によれば、照射領域のサイズが限られている場合であっても
、指示地点までの進行方向を運転者に示すことができる。
【0064】
これまで、本発明のいくつかの実施形態を説明したが、これらの実施形態は、例として
表示したものであり、発明の範囲を限定することは意図していない。これら新規な実施形
態は、その他の様々な形態で実施されることが可能であり、発明の要旨を逸脱しない範囲
で、種々の省略、置き換え、変更を行うことができる。これら実施形態やその変形は、発
明の範囲や要旨に含まれるとともに、特許請求の範囲に記載された発明とその均等の範囲
に含まれる。
【符号の説明】
【0065】
1 表示装置
5 光束
10 指標画像
11 処理部
13 表示部
15 検出装置
16 検知センサ
20 車両
21 フロントガラス
30,40 付帯画像
100 観察者
101 眼
111 設定部
112 第1判定部
113 第2判定部
114 算出部
115 生成部
116 制御部
131 光源
132 制限部
133 拡散部
134 画像形成部
135 第1のレンズ
136 開口部
137 第2のレンズ
138 反射板
【特許請求の範囲】
【請求項1】
乗り物に装備され、前記乗り物に設けられた表示領域に画像を表示する表示装置であって
、
運転者に指示すべき指示地点を設定する設定部と、
前記乗り物が前記指示地点に接近した場合、前記指示地点を示すべき指標画像を前記表示
領域内に表示することが可能であるか否かを判定する判定部と、
表示することが可能である場合は、前記指示地点まで向かって移動する前記指標画像を生
成し、表示することが可能でない場合は、前記指標画像に付帯する付帯画像であって、前
記表示領域外で前記指標画像が示しているであろう位置を、前記運転者に認識させるため
の前記付帯画像を生成する生成部と
を備える、表示装置。
【請求項2】
前記指標画像を前記表示領域内に表示することが可能でない場合に、前記表示領域のサイ
ズと、前記指示地点までの距離と、予め定められた前記指標画像の長さとに基づいて、前
記付帯画像の長さを算出する算出部をさらに備える、
請求項1記載の表示装置。
【請求項3】
前記算出部は、さらに前記指示地点までの距離に基づいて、前記付帯画像の長さを算出す
る、
請求項2記載の表示装置。
【請求項4】
前記生成部は、前記指標画像の影を表す前記付帯画像を生成する、
請求項1記載の表示装置。
【請求項5】
前記生成部は、前記指標画像が通過するトンネル形状の前記付帯画像を生成する、
請求項1記載の表示装置。
【請求項6】
乗り物に装備され、前記乗り物に設けられた表示領域に画像を表示する表示装置の表示方
法であって、
運転者に指示すべき指示地点を設定し、
前記乗り物が前記指示地点に接近した場合、前記指示地点を示すべき指標画像を前記表示
領域内に表示することが可能であるか否かを判定し、
表示することが可能である場合は、前記指示地点まで向かって移動する前記指標画像を生
成し、表示することが可能でない場合は、前記指標画像に付帯する付帯画像であって、前
記表示領域外で前記指標画像が示しているであろう位置を、前記運転者に認識させるため
の前記付帯画像を生成する、
表示方法。
【請求項1】
乗り物に装備され、前記乗り物に設けられた表示領域に画像を表示する表示装置であって
、
運転者に指示すべき指示地点を設定する設定部と、
前記乗り物が前記指示地点に接近した場合、前記指示地点を示すべき指標画像を前記表示
領域内に表示することが可能であるか否かを判定する判定部と、
表示することが可能である場合は、前記指示地点まで向かって移動する前記指標画像を生
成し、表示することが可能でない場合は、前記指標画像に付帯する付帯画像であって、前
記表示領域外で前記指標画像が示しているであろう位置を、前記運転者に認識させるため
の前記付帯画像を生成する生成部と
を備える、表示装置。
【請求項2】
前記指標画像を前記表示領域内に表示することが可能でない場合に、前記表示領域のサイ
ズと、前記指示地点までの距離と、予め定められた前記指標画像の長さとに基づいて、前
記付帯画像の長さを算出する算出部をさらに備える、
請求項1記載の表示装置。
【請求項3】
前記算出部は、さらに前記指示地点までの距離に基づいて、前記付帯画像の長さを算出す
る、
請求項2記載の表示装置。
【請求項4】
前記生成部は、前記指標画像の影を表す前記付帯画像を生成する、
請求項1記載の表示装置。
【請求項5】
前記生成部は、前記指標画像が通過するトンネル形状の前記付帯画像を生成する、
請求項1記載の表示装置。
【請求項6】
乗り物に装備され、前記乗り物に設けられた表示領域に画像を表示する表示装置の表示方
法であって、
運転者に指示すべき指示地点を設定し、
前記乗り物が前記指示地点に接近した場合、前記指示地点を示すべき指標画像を前記表示
領域内に表示することが可能であるか否かを判定し、
表示することが可能である場合は、前記指示地点まで向かって移動する前記指標画像を生
成し、表示することが可能でない場合は、前記指標画像に付帯する付帯画像であって、前
記表示領域外で前記指標画像が示しているであろう位置を、前記運転者に認識させるため
の前記付帯画像を生成する、
表示方法。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2013−78964(P2013−78964A)
【公開日】平成25年5月2日(2013.5.2)
【国際特許分類】
【出願番号】特願2011−218671(P2011−218671)
【出願日】平成23年9月30日(2011.9.30)
【出願人】(000003078)株式会社東芝 (54,554)
【Fターム(参考)】
【公開日】平成25年5月2日(2013.5.2)
【国際特許分類】
【出願日】平成23年9月30日(2011.9.30)
【出願人】(000003078)株式会社東芝 (54,554)
【Fターム(参考)】
[ Back to top ]