
表示装置
【課題】消費電力を抑えることができる表示装置を提供すること。
【解決手段】表示装置1は、光を出射する光出射部3と、光出射部3から出射した光を反射させる光反射部411e、421eが回動中心軸まわりに回動可能に設けられ、かつ、表示面91上にて、光反射部411e、421eで反射した光を水平方向に走査するとともに垂直方向に走査する光走査部4と、光反射部411e、421eの回動の振幅を変更するとともに、光出射部3から出射される単位時間当たりの光量を調整する作動制御装置5とを有し、作動制御装置5が光反射部411eの回動の振幅を変更することにより、表示面91の第1の領域に光を走査する第1の状態と、表示面91の第1の領域と第1の領域に隣接する第2の領域とに光を走査する第2の状態とを切り換える。
【解決手段】表示装置1は、光を出射する光出射部3と、光出射部3から出射した光を反射させる光反射部411e、421eが回動中心軸まわりに回動可能に設けられ、かつ、表示面91上にて、光反射部411e、421eで反射した光を水平方向に走査するとともに垂直方向に走査する光走査部4と、光反射部411e、421eの回動の振幅を変更するとともに、光出射部3から出射される単位時間当たりの光量を調整する作動制御装置5とを有し、作動制御装置5が光反射部411eの回動の振幅を変更することにより、表示面91の第1の領域に光を走査する第1の状態と、表示面91の第1の領域と第1の領域に隣接する第2の領域とに光を走査する第2の状態とを切り換える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、表示装置に関する。
【背景技術】
【0002】
例えば、車両のウインドシールドに計器やナビゲーション等の各種情報に関する画像を表示するヘッドアップディスプレイ(HUD)としては、スクリーンに対して光を2次元的に走査することにより画像を表示するスキャンタイプのプロジェクションシステム(Laser Scan Projection:LSP)と呼ばれる表示装置を用いたものが知られている(例えば、特許文献1参照)。
このような表示装置には、光を1次元または2次元に走査する光スキャナーが設けられている。例えば、特許文献1に記載の表示装置では、鏡面部を互いに直交する2つの回転軸まわりにそれぞれ回動させることにより光を2次元に走査する光スキャナーを備える。
【0003】
しかし、このような表示装置では、常に、光スキャナーの走査範囲(例えば、特許文献1では、鏡面部の回動の振幅)が一定であるため、画像を表示可能な領域である描画可能領域の形状および大きさが一定である。
そのため、表示する画像の形状(外形)や大きさによっては、描画可能領域のうち画像の形成されていない領域の面積が大きくなってしまう場合があった。このような場合、1フレーム中における画像の描画を行う期間の割合(いわゆる時間開口率)が低下してしまう。このような時間開口率の低下は、エネルギー効率の低下を意味する。
特に、HUDのような表示装置においては、随時表示する画像(例えば速度計を示す画像)とは異なる領域に適時必要な画像(例えば危険を知らせる画像)を表示するが、その適時必要な画像が表示される領域は、画像を表示しない期間が比較的長い。そのため、エネルギー効率が極めて低くなり、消費電力の増大を招いてしまう。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2009−137491号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
本発明の目的は、消費電力を抑えることができる表示装置を提供することにある。
【課題を解決するための手段】
【0006】
このような目的は、下記の本発明により達成される。
本発明の表示装置は、光を出射する光出射部と、
前記光出射部から出射した光を反射させる少なくとも1つの光反射部が回動中心軸まわりに回動可能に設けられ、かつ、画像が表示される表示面上にて、前記光反射部で反射した光を第1の方向に走査するとともに前記第1の方向に直交する第2の方向に前記第1の方向に走査する速度よりも遅い速度で走査する光走査部と、
前記光反射部の回動の振幅を変更する振幅変更部と、
前記光出射部からの光の出射タイミングおよび前記光出射部から出射される光量を調整する発光制御部と、を有し、
前記振幅変更部が前記光反射部の回動の振幅を変更することにより、前記表示面の第1の領域に光を走査する第1の状態と、前記表示面の前記第1の領域と前記第1の領域と異なる第2の領域とに光を走査する第2の状態とを切り換え、
前記発光制御部が前記光出射部から出射する光量を調整することにより、前記第1の領域の単位面積当たりの光量を前記第1の状態と前記第2の状態とで等しくすることを特徴とする。
このような表示装置によれば、必要時のみ、描画可能領域を大きくし、それ以外のときには、描画可能領域が必要最低限となるように光反射部の回動の振幅を抑えることができる。そのため、光反射部の回動の振幅が一定である場合に比し、消費電力を抑えることができる。
【0007】
本発明の表示装置では、前記発光制御部は、前記光出射部からの光の出射タイミングを調整することにより、前記第1の状態で前記第1の領域に表示される画像の解像度と、前記第2の状態で前記第1の領域に表示される画像の解像度とを等しくすることが好ましい。
これにより、第1の状態と第2の状態との切り換え時に第1の領域に表示される画像の解像度が変化することを低減することができる。
【0008】
本発明の表示装置では、前記第1の状態で前記第1の領域に表示される画像と、前記第2の状態で前記第1の領域に表示される画像とは、互いに同じ種類であり、
前記第1の領域に表示される画像と、前記第2の領域に表示される画像とは、互いに異なる種類であることが好ましい。
これにより、第2の状態において、第2の領域に表示される画像を、第1の領域に表示される画像よりも目に付きやすくすることができる。
【0009】
本発明の表示装置では、前記第1の領域に表示される画像は、前記表示装置を備える移動体の移動状態に関する情報を示す画像を含み、
前記第2の領域に表示される画像は、前記移動体の外部の状況に関する情報を示す画像を含むことが好ましい。
これにより、第1の状態および第2の状態において、表示装置を備える移動体の移動状態に関する情報を提供可能としつつ、第2の状態において、移動体の外部の状況に関する情報を報知することができる。
【0010】
本発明の表示装置では、前記移動体の外部の状況を検知する状況検知部を有し、
前記振幅変更部は、前記状況検知部の検知結果に基づいて、前記第1の状態と前記第2の状態とを切り換えることが好ましい。
これにより、移動体の外部の状況を検知し得るとともに、その検知結果を報知することができる。
【0011】
本発明の表示装置では、前記振幅変更部は、前記第1の方向に光を走査する前記光反射部の回動の振幅を変更することが好ましい。
これにより、描画可能領域の第1の方向での長さを変更することができる。
本発明の表示装置では、前記振幅変更部は、前記第2の方向に光を走査する前記光反射部の回動の振幅を変更することが好ましい。
これにより、描画可能領域の第2の方向での長さを変更することができる。
【0012】
本発明の表示装置では、前記光走査部は、周期的に変化する電流または電圧の供給により前記光反射部を回動させる駆動部を備え、
前記振幅変更部は、前記駆動部に供給する前記電流または前記電圧の大きさおよび周波数を調整することにより、前記光反射部の回動の振幅を変更することが好ましい。
これにより、比較的簡単かつ確実に、光反射部の回動の振幅を変更することができる。
本発明の表示装置では、前記光出射部は、レーザー光を出射することが好ましい。
これにより、平行光とするためのレンズ等の光学系を簡略化または小型化することができるため、光出射部の小型化、ひいては、画像形成装置の小型化を図ることができる。
【図面の簡単な説明】
【0013】
【図1】本発明の第1実施形態に係る表示装置(ヘッドアップディスプレイ)を備える表示システム(ヘッドアップディスプレイシステム)を示す概略図である。
【図2】図1に示す表示システムの概略を説明するための図である。
【図3】図1に示す表示システムに備えられた表示装置の概略構成を示す模式図である。
【図4】図3に示す表示装置の光走査部に備えられた光スキャナーの部分断面斜視図である。
【図5】図4に示す光スキャナーの動作を説明する断面図である。
【図6】図3に示す表示装置の制御系(作動制御装置、光走査部および光源ユニット)を示すブロック図である。
【図7】図3に示す表示装置の動作を説明するための図(描画可能領域、描画領域および画像を説明する図)である。
【図8】図7に示す描画可能領域を説明する図である。
【図9】図3に示す表示装置の光スキャナー(垂直走査用の光スキャナー)の可動板の振れ角の変遷を示すグラフである。
【図10】図3に示す表示装置の光スキャナー(水平走査用の光スキャナー)の可動板の振れ角の変遷(第1の状態)を示すグラフである。
【図11】図3に示す表示装置の光スキャナー(水平走査用の光スキャナー)の可動板の振れ角の変遷(第2の状態)を示すグラフである。
【図12】本発明の第2実施形態に係る表示装置の動作を説明するための図(描画可能領域、描画領域および画像を説明する図)である。
【図13】図12に示す描画可能領域を説明する図である。
【図14】本発明の第3実施形態に係る表示装置に備えられたプロジェクターの光スキャナーを示す模式的平面図である。
【図15】図14中のB−B線断面図である。
【発明を実施するための形態】
【0014】
以下、本発明の表示装置の好適な実施形態について、添付図面を参照しつつ説明する。
<第1実施形態>
図1は、本発明の第1実施形態に係る表示装置(ヘッドアップディスプレイ)を備える表示システム(ヘッドアップディスプレイシステム)を示す概略図、図2は、図1に示す表示システムの概略を説明するための図、図3は、図1に示す表示システムに備えられた表示装置の概略構成を示す模式図、図4は、図3に示す表示装置の光走査部に備えられた光スキャナーの部分断面斜視図、図5は、図4に示す光スキャナーの動作を説明する断面図、図6は、図3に示す表示装置の制御系(作動制御装置、光走査部および光源ユニット)を示すブロック図、図7は、図3に示す表示装置の動作を説明するための図(描画可能領域、描画領域および画像を説明する図)、図8は、図7に示す描画可能領域を説明する図、図9は、図3に示す表示装置の光スキャナー(垂直走査用の光スキャナー)の可動板の振れ角の変遷を示すグラフ、図10は、図3に示す表示装置の光スキャナー(水平走査用の光スキャナー)の可動板の振れ角の変遷(第1の状態)を示すグラフ、図11は、図3に示す表示装置の光スキャナー(水平走査用の光スキャナー)の可動板の振れ角の変遷(第2の状態)を示すグラフである。なお、以下では、説明の便宜上、図5中の上側を「上」、下側を「下」、右側を「右」、左側を「左」と言う。
【0015】
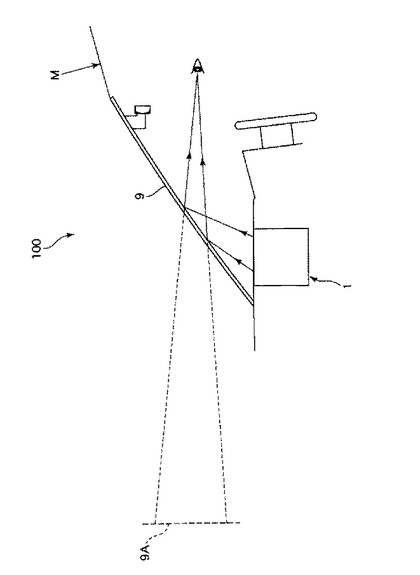
図1に示す表示システム100は、移動体Mに設置された表示装置1を備え、表示装置1が移動体Mのウインドシールド(フロントウインドウ)9に光を投影することにより画像を表示する。
本実施形態では、移動体Mは、車両である。その移動体Mの操縦者は、ウインドシールド9に対して前方に位置する仮想面9Aに虚像として画像(図2に示す画像g)を視認することができる。
【0016】
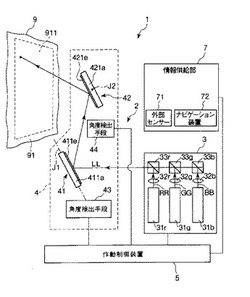
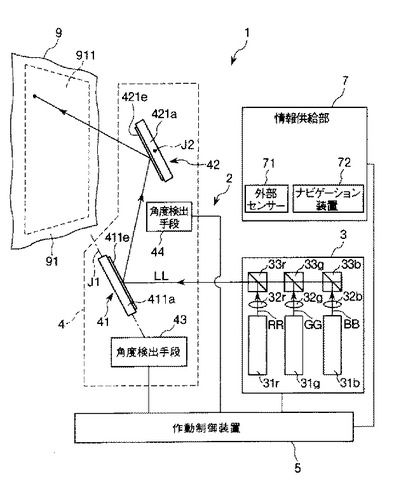
図3に示すように、表示装置1は、ウインドシールド9の表示面91に光を走査させて画像を表示する(描画する)プロジェクター2と、プロジェクター2の駆動を制御する作動制御装置5と、情報供給部7とで構成されている。
このような表示装置1では、作動制御装置5が情報供給部7からの情報に基づいてプロジェクター2の作動を制御し、ウインドシールド9の表示面91上に画像を表示する。
【0017】
以下、表示装置1を構成する各部を順次詳細に説明する。
(プロジェクター)
まず、プロジェクター2について説明する。
プロジェクター2は、表示面91に形成される描画領域911に、光を走査することにより画像を表示するように構成されている。
具体的には、図1に示すように、プロジェクター2は、光を出射する光源ユニット(光出射部)3と、表示面91に対して光源ユニット3から出射した光を走査する光走査部4とを有している。
【0018】
[光源ユニット(光出射部)]
図3に示すように、光源ユニット3は、各色のレーザー光源31r、31g、31bと、各色のレーザー光源31r、31g、31bに対応して設けられたコリメーターレンズ32r、32g、32bおよびダイクロイックミラー33r、33g、33bとを備えている。
【0019】
また、各色のレーザー光源31r、31g、31bは、それぞれ、駆動回路310r、310g、310bと、赤色の光源320r、緑色の光源320g、青色の光源320bとを有しており(図6参照)、図3に示すように、赤色、緑色および青色のレーザー光RR、GG、BBを出射する。レーザー光RR、GG、BBは、それぞれ、作動制御装置5の後述する光源変調部54から送信される駆動信号に対応して変調された状態で出射され、コリメート光学素子であるコリメーターレンズ32r、32g、32bによって平行化されて細いビームとされる。
ダイクロイックミラー33r、33g、33bは、それぞれ、赤色レーザー光RR、緑色レーザー光GG、青色レーザー光BBを反射する特性を有し、各色のレーザー光RR、GG、BBを結合して1つのレーザー光(光)LLを出射する。
【0020】
なお、コリメーターレンズ32r、32g、32bに代えてコリメーターミラーを用いることができ、この場合も、平行光束の細いビームを形成することができる。また、各色のレーザー光源31r、31g、31bから平行光束が出射される場合、コリメーターレンズ32r、32g、32bは、省略することができる。さらに、レーザー光源31r、31g、31bについては、同様の光束を発生する発光ダイオード等の光源に置換することができる。また、図3の各色のレーザー光源31r、31g、31b、コリメーターレンズ32r、32g、32b、およびダイクロイックミラー33r、33g、33bの順番はあくまで1例である。従って、各色の組み合わせ(赤色はレーザー光源31r、コリメーターレンズ32r、ダイクロイックミラー33r、緑色はレーザー光源31g、コリメーターレンズ32g、ダイクロイックミラー33g、青色はレーザー光源31b、コリメーターレンズ32b、ダイクロイックミラー33b)を保持したままその順序は自由に設定できる。例えば、光走査部4に近い順に、青色、赤色、緑色という組み合わせも可能である。
【0021】
このような光源ユニット3は、前述したようにレーザー光を出射するので、後述するように光反射部411eの振れ角を変更しても画像が暈けるのを簡単に防止することができる。また、このような光源ユニット3を用いたプロジェクター2は、フォーカスフリーで、近接投射が可能であるとともに、投射位置を設置位置に限定されず任意の位置に調整することができる。また、レーザー光を用いると、平行光とするためのレンズ等の簡略化または小型化することができるため、光出射部の小型化、ひいては、表示装置1の小型化を図ることができる。
【0022】
[光走査部]
次に、光走査部4について説明する。
光走査部4は、光源ユニット3から出射したレーザー光LLを表示面91に対し、水平方向(第1の方向)に走査(水平走査:主走査)すると共に、水平方向の走査速度(第1の速度)よりも遅い走査速度(第2の速度)で垂直方向(第1の方向に直交する第2の方向)に走査(垂直走査:副走査)することで2次元的に走査するものである。
【0023】
この光走査部4は、光源ユニット3から出射したレーザー光LLを表示面91に対し、水平方向に走査する水平走査用ミラーである光スキャナー(第1の方向走査部)41と、光スキャナー41の後述する可動板411aの角度(挙動)を検出する角度検出手段(挙動検出手段)43と、光源ユニット3から出射したレーザー光LLを表示面91に対し、垂直方向に走査する垂直走査用ミラーである光スキャナー(第2の方向走査部)42と、光スキャナー42の後述する可動板421aの角度(挙動)を検出する角度検出手段(挙動検出手段)44とを有している。
【0024】
以下、光スキャナー41、42の構成について説明するが、光スキャナー41、42は、互いに同様の構成であるため、以下では光スキャナー41について代表して説明し、光スキャナー42については、その説明を省略する。
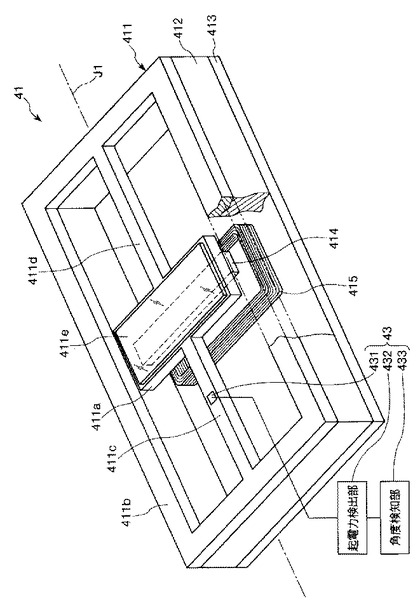
図2に示すように、光スキャナー41は、いわゆる1自由度振動系(1次元走査)のものであり、基体411と、基体411の下面に対向するよう設けられた対向基板413と、基体411と対向基板413との間に設けられたスペーサー部材412とを有している。
【0025】
基体411は、可動板411aと、可動板411aを回動可能に支持する支持部411bと、可動板411aと支持部411bとを連結する1対の連結部411c、411dとを有している。換言すれば、支持部411bは1対の連結部411c、411dを支持しているとも言え、支持部411bは1対の連結部411c、411dを介して可動板411aを支持していると言える。
【0026】
可動板411aは、その平面視にて、略長方形状をなしている。このような可動板411aの上面には、光反射性を有する光反射部(ミラー)411eが設けられている。光反射部411eは、例えば、Al、Ni等の金属膜で構成されている。また、可動板411aの下面には、永久磁石414が設けられている。
支持部411bは、可動板411aの平面視にて、可動板411aの外周を囲むように設けられている。すなわち、支持部411bは、枠状をなしていて、その内側に可動板411aが位置している。
【0027】
連結部411cは、可動板411aの左側にて、可動板411aと支持部411bとを連結し、連結部411dは、可動板411aの右側にて、可動板411aと支持部411bとを連結している。
連結部411c、411dは、それぞれ、長手形状をなしている。また、連結部411c、411dは、それぞれ、弾性変形可能である。このような1対の連結部411c、411dは、互いに同軸的に設けられており、この軸(以下「回動中心軸J1」と言う)まわりに、可動板411aが支持部411bに対して回動する。
【0028】
このような基体411は、例えば、シリコンを主材料として構成されていて、可動板411aと支持部411bと連結部411c、411dとが一体的に形成されている。このように、シリコンを主材料とすることにより、優れた回動特性を実現できるとともに、優れた耐久性を発揮することができる。また、シリコンは微細な加工が可能であるため、基体411をシリコンを主材料として構成することにより、基体411の寸法精度を優れたものとし、光スキャナー41の振動特性を優れたものとすることができる。また、光スキャナー41の小型化を図ることができる。
【0029】
スペーサー部材412は、枠状をなしていて、その上面が基体411の下面と接合している。また、スペーサー部材412は、可動板411aの板厚方向からの平面視にて、支持部411bの形状とほぼ等しくなっている。このようなスペーサー部材412は、例えば、各種ガラス、各種セラミックス、シリコン、SiO2などで構成されている。
なお、スペーサー部材412と基体411との接合方法としては、特に限定されず、例えば、接着剤等の別部材を介して接合してもよいし、スペーサー部材412の構成材料などによっては直接接合や陽極接合などを用いてもよい。
【0030】
対向基板413は、スペーサー部材412と同様に、例えば、各種ガラス、シリコン、SiO2などで構成されている。このような対向基板413の上面であって、可動板411aと対向する部位には、コイル415が設けられている。
永久磁石414は、板棒状をなしていて、可動板411aの下面に沿って設けられている。このような永久磁石414は、可動板411aの平面視にて、回動中心軸J1に対して直交する方向に磁化(着磁)されている。すなわち、永久磁石414は、両極(S極、N極)を結んだ線分が、回動中心軸J1に対して直交するよう設けられている。
【0031】
このような永久磁石414としては、特に限定されず、例えば、ネオジム磁石、フェライト磁石、サマリウムコバルト磁石、アルニコ磁石などを用いることができる。
コイル415は、可動板411aの平面視にて、永久磁石414の外周を囲むように設けられている。
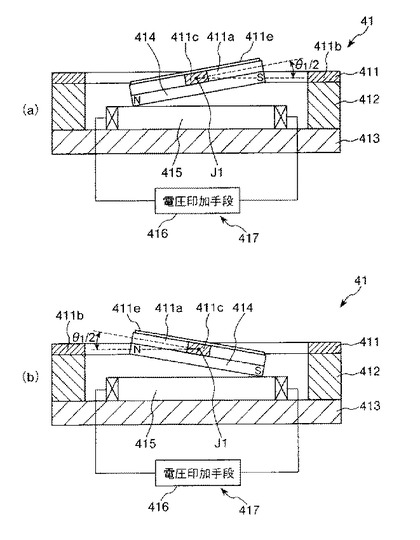
また、光スキャナー41は、コイル415に電圧を印加する電圧印加手段416を有している。電圧印加手段416は、印加する電圧の電圧値や周波数等の各条件を調整(変更)し得るように構成されている。電圧印加手段416、コイル415および永久磁石414により、可動板411aを回動させる駆動手段(駆動部)417が構成される。
コイル415には、電圧印加手段416から所定の電圧が印加され、所定の電流が流れる。
【0032】
例えば、電圧印加手段416からコイル415に交番電圧を印加すると、それに応じて電流が流れ、可動板411aの厚さ方向(図2中上下方向)の磁界が発生し、かつ、その磁界の向きが周期的に切り換わる。すなわち、コイル415の上側付近がS極、下側付近がN極となる状態Aと、コイル415の上側付近がN極、下側付近がS極となる状態Bとが交互に切り換わる。その際、電圧印加手段416は、後述する作動制御装置5により駆動制御される。
状態Aでは、図5(a)に示すように、永久磁石414の右側の部分が、コイル415への通電により発生する磁界との反発力により上側へ変位するとともに、永久磁石414の左側の部分が、前記磁界との吸引力により下側へ変位する。これにより、可動板411aが反時計回りに回動して傾斜する。
一方、状態Bでは、図5(b)に示すように、永久磁石414の右側の部分が下側へ変位するとともに、永久磁石414の左側の部分が上側へ変位する。これにより、可動板411aが時計回りに回動して傾斜する。
【0033】
このような状態Aと状態Bとを交互に繰り返すことにより、連結部411c、411dを捩り変形させながら、可動板411aが回動中心軸J1まわりに回動(振動)する。
また、後述する作動制御装置5の制御により、電圧印加手段416からコイル415に印加する電圧を調整することにより、流れる電流を調整することができ、これにより、可動板411a(光反射部411eの反射面)の回動中心軸J1まわりの回動の振れ角(振幅)を調整することができる。
【0034】
なお、このような光スキャナー41の構成としては、可動板411aを回動させることができれば、特に限定されず、例えば、2自由度振動系を有するものであってもよく、また、光スキャナー41の駆動方式は、コイル415と永久磁石414とを用いた電磁駆動に代えて、例えば、圧電素子を用いた圧電駆動や、静電引力を用いた静電駆動等であってもよい。
【0035】
図3に示すように、上述のような構成の光スキャナー41、42は、互いの回動中心軸J1、J2の方向が直交するように設けられている。光スキャナー41、42をこのように設けることにより、表示面91に対し、光源ユニット3から出射したレーザー光LLを2次元的に(互いに直交する2方向に)走査することができる。これにより、比較的簡単な構成で、表示面91に2次元画像を描画することができる。
【0036】
具体的に説明すれば、光源ユニット3から出射した光は、光スキャナー41の光反射部411eの反射面で反射し、次いで、光スキャナー42の光反射部421eの反射面で反射し、表示面91に投射(照射)される。このとき、光スキャナー41の光反射部411eを回動させるとともに、その角速度(速度)よりも遅い角速度で光スキャナー42の光反射部421eを回動させる。これにより、光源ユニット3から出射したレーザー光LLは、表示面91に対し、水平方向に走査されるとともに、その水平方向の走査速度よりも遅い走査速度で垂直方向に走査される。このようにして、光源ユニット3から出射したレーザー光LLは、表示面91に対し、2次元的に走査され、表示面91に画像が描画される。
【0037】
ここで、光スキャナー41の光反射部411eの角速度よりも遅い角速度で光スキャナー42の光反射部421eを回動させるために、例えば、光スキャナー41を共振を利用した共振駆動とし、光スキャナー42を共振を利用しない非共振駆動としてもよい。また、光スキャナー41、42をともに共振駆動とする場合には、光スキャナー41の共振周波数(可動板411aおよび連結部411c、411dからなる振動系の共振周波数)が、光スキャナー42の共振周波数よりも高くなるように光スキャナー41、42を設計すればよい。
なお、光源ユニット3から出射した光が、先に、光スキャナー42の光反射部421eで反射し、次に、光スキャナー41の光反射部411eで反射するようになっていてもよい。すなわち、先に、垂直走査がなされ、次に、水平走査がなされるように構成されていてもよい。
【0038】
次に、光スキャナー41の可動板411aの角度を検出する角度検出手段43について説明する。なお、光スキャナー42の可動板421aの角度を検出する角度検出手段44は、角度検出手段43と同様の構成であるため、その説明を省略する。
図4に示すように、角度検出手段43は、光スキャナー41の連結部411c上に設けられた圧電素子431と、圧電素子431から発生する起電力を検出する起電力検出部432と、起電力検出部432の検出結果に基づいて可動板411aの角度を求める(挙動を検知する)角度検知部433とを有している。
【0039】
圧電素子431は、可動板411aの回動に伴って連結部411cが捩り変形すると、それに伴って変形する。圧電素子431は、外力が付与されていない自然状態から変形すると、その変形量に応じた大きさの起電力を発生する性質(言い換えると、変形量に応じて抵抗値が変化する性質)を有しているため、角度検知部433は、起電力検出部432で検出された起電力(または抵抗値)の大きさに基づいて、連結部411cの捩れの程度を求め、さらに、その捩れの程度から可動板411a(光反射部411eの反射面)の角度を求める。また、角度検知部433は、可動板411aの回動中心軸J1を中心とする振れ角(最大振れ角)を求める。この可動板411aの角度および振れ角の情報を含む信号は、角度検知部433から作動制御装置5に送信される。
【0040】
なお、前記検出する可動板411aの角度の基準(0°)は、光スキャナー41の状態がいかなるものであってもよいが、例えば、光スキャナー41が初期状態(コイル415に電圧が印加されていない状態)であるときに設定することができる。
また、前記可動板411aの角度の検出は、リアルタイムで(連続的に)行ってもよく、また、間欠的に行ってもよい。また、角度検出手段43としては、可動板411aの角度を検出することができれば、本実施形態のような圧電素子を用いたものに限定されず、例えば、光学センサーを用いてもよい。
【0041】
[作動制御装置]
次に、作動制御装置5について説明する。
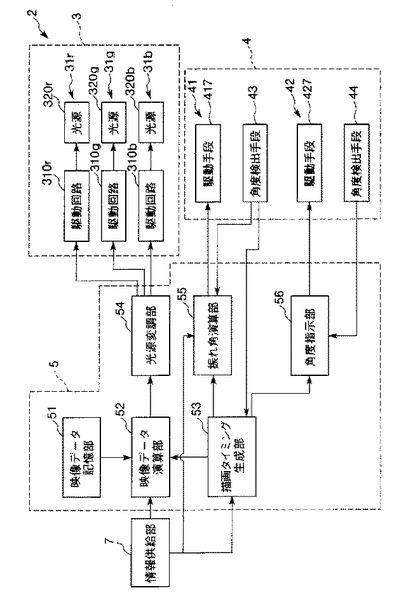
図6に示すように、作動制御装置5は、画像を描画する際に用いられる映像データ(画像データ)を記憶する映像データ記憶部(映像データ記憶手段)51と、映像データ演算部52と、描画タイミング生成部53と、光源変調部(光変調部)54と、振れ角演算部(振幅演算部)55と、角度指示部56とを有している。
特に、この作動制御装置5は、水平方向(第1の方向)に走査する可動板411aの光反射部411eの回動の振幅(振れ角)を変更する変更手段(振幅変更部)を構成する。
このような作動制御装置5は、光反射部411eの回動の振幅(振れ角)を変更することにより、描画が可能な領域である描画可能領域912の水平方向での長さを変更する。
【0042】
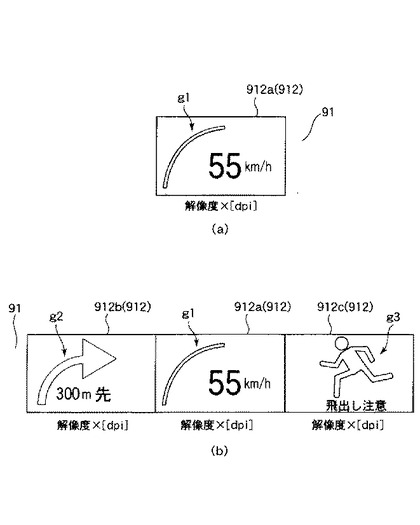
すなわち、作動制御装置5が光反射部411eの回動の振幅を変更することにより、図7(a)に示すように、表示面91の第1の領域912aに光を走査する第1の状態と、図7(b)に示すように、表示面91の第1の領域912aと第1の領域912aと異なって隣接している第2の領域912b、912cとに光を走査する第2の状態とを切り換える。
これにより、必要時のみ、描画可能領域912を大きくし、それ以外のときには、描画可能領域912が必要最低限となるように光反射部411eの回動の振幅を抑えることができる。そのため、光反射部911eの回動の振幅が一定である場合に比し、消費電力を抑えることができる。
【0043】
以下、作動制御装置5について詳述する。
作動制御装置5によるプロジェクター2の制御においては、まず、プロジェクター2に映像データが入力される。入力された映像データは映像データ記憶部51に一時的に記憶され、その映像データ記憶部51から読み出された映像データを用いて画像の描画が行われる。この場合、映像データのすべてが映像データ記憶部51に記憶された後に、画像の描画を開始してもよく、また、映像データの一部が映像データ記憶部51に記憶された後に、画像の描画を開始し、その画像の描画と並行して続きの映像データを映像データ記憶部51に記憶するようにしてもよい。
【0044】
映像データの一部が映像データ記憶部51に記憶された後に画像の描画を開始する場合は、初めに、少なくとも1フレーム分の映像データを映像データ記憶部51に記憶し、その後に画像の描画を開始する。
描画タイミング生成部53では、描画タイミング情報および描画ライン情報がそれぞれ生成される。描画タイミング情報は、映像データ演算部52に送出され、描画ライン情報は、振れ角演算部55および角度指示部56に送出される。
【0045】
描画タイミング情報には、描画を行うタイミング(画素毎の光の出射タイミング)の情報、画素毎の光の強度(表示面での光の単位面積当たりの強度)の情報等が含まれる。また、描画ライン情報には、図8に示す描画を行う描画ラインLの垂直方向の位置(可動板421aの目標角度)の情報、および、描画ラインLの長さ(可動板411aの目標角度)情報等が含まれる。なお、描画ラインLのいずれの部位の位置を前記描画ラインLの垂直方向の位置として設定してもよいが、例えば、左側の先端、右側の先端、中央等が挙げられる。
【0046】
また、描画ライン情報は、後述するように、映像データに基づいて変更される。また、描画タイミング情報も、描画ライン情報の変更に伴って変更される。
映像データ演算部52は、描画タイミング生成部53から入力された描画タイミング情報に基づいて、映像データ記憶部51から描画する画素に対応する映像データを読み出し、各種の補正演算等を行った後、各色の輝度データを光源変調部54に送出する。
【0047】
光源変調部54は、映像データ演算部52から入力された各色の輝度データに基づいて、各駆動回路310r、310g、310bを介して各光源320r、320g、320bの変調を行う。すなわち、各光源320r、320g、320bのオン/オフや、出力の調整(増減)等を行う。これにより、光源ユニット3は、映像データ(画像情報)の画素毎に対応した光を所定のタイミングおよび強度で順次出射する。
【0048】
光スキャナー41側の角度検出手段43は、その可動板411aの角度および振れ角を検出し、その角度および振れ角の情報(可動板411aの角度情報)を作動制御装置5の描画タイミング生成部53および振れ角演算部55に送出する。また、光スキャナー42側の角度検出手段44は、その可動板421aの角度を検出し、その角度の情報(可動板421aの角度情報)を作動制御装置5の角度指示部56に送出する。
【0049】
描画タイミング生成部53は、現在の描画ラインLの描画が終了し、角度検出手段43から可動板411aの振れ角の情報が入力されると、それに同期して、角度指示部56に、次に描画を行う描画ラインLの描画開始点にレーザー光LLが照射されるときの可動板421aの目標角度を示す目標角度情報(角度指示)を送出する。その可動板421aの目標角度は、描画ラインLのピッチが一定になるように設定される。角度指示部56は、角度検出手段44で検出された可動板421aの角度と、前記可動板421aの目標角度とを比較して、その差が0になるような補正を行い、光スキャナー42の駆動手段427に駆動データを送出する。
【0050】
駆動手段427は、前記駆動データに基づいて、光スキャナー42を駆動する(コイルに電圧を印加する)。これにより、描画開始点にレーザー光LLが照射されたとき、可動板421aの角度は、前記目標角度になる。
なお、本実施形態では、各描画ラインLにおいて、描画開始点から描画終了点まで、可動板421aの角速度を一定とし、レーザー光LLの垂直方向の走査速度を一定とするが、可動板421aの角速度を徐々に変化させ、レーザー光LLの垂直方向の走査速度を徐々に変化さてもよい。
【0051】
また、描画タイミング生成部53は、振れ角演算部55に、描画ライン情報、すなわち、次に描画を行う描画ラインLの垂直方向の位置の情報、および、描画ラインLの長さ情報を送出する。
振れ角演算部55では、描画タイミング生成部53から入力された次に描画を行う描画ラインLの垂直方向の位置の情報、および、その描画ラインLの長さ情報に基づいて、次に描画を行う描画ラインLにおける可動板411aの目標振れ角(振れ角の目標値)を求める。
【0052】
そして、角度検出手段43から入力された可動板411aの振れ角の情報と、前記可動板411aの目標振れ角とに基づいて、可動板411aの振れ角が目標振れ角となるように、光スキャナー41の駆動手段417に駆動データを送出する。
駆動手段417は、前記駆動データに基づいて、コイル415に、光スキャナー41の共振周波数と同じ周波数の実効電圧を印加して電流を流し、所定の磁界を発生させ、実効電流の大きさや光スキャナー41と駆動波形との位相差を変化させる事で、光スキャナー41にエネルギーを供給したり、逆に、光スキャナー41からエネルギーを奪ったりする。これにより、共振運動している可動板411aの振れ角は、前記目標振れ角になる。このようにして、角度検出手段43により検出された可動板411aの振れ角の情報(検出結果)と、前記目標振れ角(目標値)とに基づいて、可動板411aの振れ角が目標振れ角になるようにその可動板411aの振れ角を調整しつつ、描画領域911の各描画ラインL上に、順次、レーザー光LLを走査し、画像を描画してゆく。
【0053】
このように作動制御装置5は、駆動手段417の電圧印加手段416が発生する電流または電圧の大きさを調整することにより、水平方向に走査する光反射部411eの振れ角を変更する。これにより、簡単かつ確実に、光反射部411eの振れ角を変更することができる。なお、作動制御装置5は、駆動手段417の電圧印加手段416が発生する電流または電圧の大きさおよび周波数を調整することにより、水平方向に走査する光反射部411eの振れ角を変更することもできる。
また、作動制御装置5は、情報供給部7からの情報に基づいて、プロジェクター2の作動を制御する。例えば、情報供給部7からの情報に基づき、プロジェクター2が表示する映像を変更したり、光反射部411eの振れ角(回動の振幅)を変更したりすることができる。
【0054】
(情報供給部)
情報供給部7は、図3に示すように、外部センサー71と、ナビゲーション装置72とを有する。
外部センサー71は、例えば、CCDイメージセンサー、CMOSイメージセンサー等のイメージセンサーである。また、赤外センサー、超音波センサー等、光学的な方法でなく物体の有無を検知できるセンサーであっても良い。このような外部センサー71は移動体Mに取り付けられ、例えば、移動体Mの周囲の状況として、移動体Mの移動方向前方側の標識(道路交通標識)や、人、自転車、他の自動車等の移動体の存在の有無を検知する機能を有する。また、外部センサー71は、検知した移動体の位置、進行方向、進行速度や、検知した標識の内容を判別する機能を有していても良い。ここで、外部センサー71は、移動体Mの周囲の状況を検知する状況検知センサー(状況検知部)を構成する。
ナビゲーション装置72は、GPSを利用して目的地までの経路を操縦者に案内する機能を有する。
【0055】
以上のように構成された表示装置1は、前述したように、作動制御装置5が光反射部411eの回動の振幅を変更する。これにより、図8(a)に示すように、表示面91の第1の領域912aに光を走査する第1の状態(以下、単に「第1の状態」という)と、図8(b)に示すように、表示面91の第1の領域912aと第1の領域912aと異なって隣接する第2の領域912b、912cとに光を走査する第2の状態(以下、単に「第2の状態」という)とを切り換える。
これにより、必要時のみ、描画可能領域912を大きくし、それ以外のときには、描画可能領域912が必要最低限となるように光反射部411eの回動の振幅を抑えることができる。そのため、光反射部911eの回動の振幅が一定である場合に比し、消費電力を抑えることができる。
【0056】
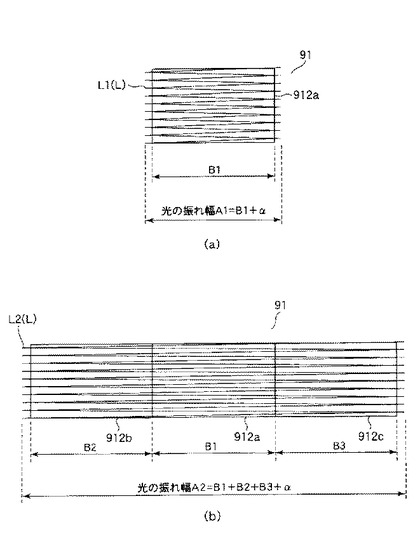
具体的に説明すると、図8(a)、(b)に示すように、表示面91上でのレーザー光LLの軌跡である複数の描画ライン(走査ライン)Lは、ジグザグ状に配置される。
ここで、光走査部4は、垂直方向に1回走査する間に、水平方向に複数回走査することにより、1つのフレームの画像を表示面91に形成し、これを繰り返すことにより複数のフレームの画像を表示面91に順次形成する。
【0057】
複数の描画ラインLの長さは、各フレーム内において、互いに等しくなっている。すなわち、各フレーム内において、光源ユニット3からレーザー光LLを出射した光出射状態(以下、単に「光出射状態」とも言う)で表示面91上でのレーザー光LLの水平方向の振れ幅(以下、単に「レーザー光(光)LLの振れ幅」とも言う)が一定となっている。
【0058】
このような描画ラインLの長さは、可動板411aの回動中心軸J1を中心とする振れ角(以下、単に「可動板411aの振れ角」とも言う)を変更することにより、変更することができる。
そこで、作動制御装置5は、可動板411aの振れ角、すなわち可動板411aの光反射部411eの振れ角(回動の振幅)を変更することにより、描画可能領域912の水平方向での長さを変更する。
【0059】
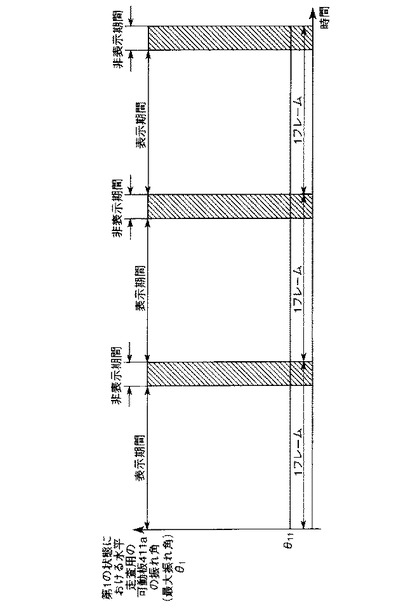
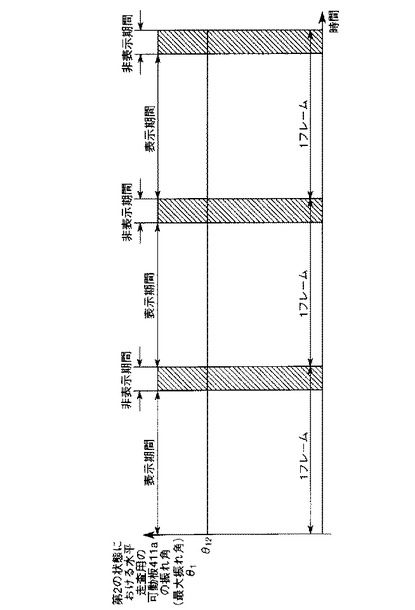
具体的には、作動制御装置5は、第1の状態では、光反射部411eの振れ角θ1を角度θ11とし、第2の状態では、光反射部411eの振れ角θ1を角度θ11よりも大きい角度θ12とする。
第1の状態においては、例えば、図8(a)に示すように、描画ラインLの長さが比較的短く設定される。これにより、表示面91上に形成される描画可能領域912の面積は比較的小さいものとなる。ここで、第1の状態での描画可能領域912は、第1の領域912aで構成される。また、描画ラインLの長さ、すなわち、水平方向での光LLの振れ幅A1は、第1の領域912aの水平方向での長さB1よりも若干長いもの(B1+α)となる。
【0060】
水平走査は前述したように各フレーム内において複数回行われるが、このような第1の状態における水平走査では、図10に示すように、可動板411aの振れ角θ1は一定(角度θ11)となっている。なお、ここで、「可動板411aの振れ角θ1」とは、図5にて時計回り(一方の方向)へ最大角度(θ1/2)まで回動したときの可動板411aと、可動板411aが図5にて反時計回り(他方の方向)へ最大角度(θ1/2)まで回動したときの可動板411aとのなす角度(最大振れ角)を言う(図11において同じ)。
【0061】
なお、各フレームの表示期間における可動板411aの振れ角θ1は、本実施形態では一定であるが、台形補正を要する場合等には漸減または漸増させるように変化させてもよい。
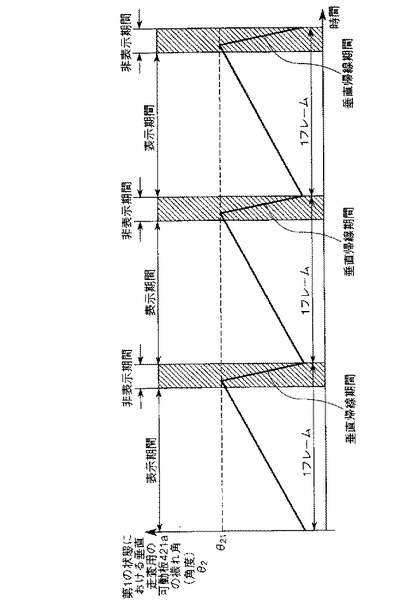
また、垂直走査は前述したように各フレーム内において1回行われるが、第1の状態および第2の状態において、可動板421aの振れ角θ2(最大振れ角)は一定(角度θ21)である。より具体的には、図9に示すように、可動板421aの角度θ2は、1フレーム内において、画像の表示を行う表示期間では最小振れ角から徐々に増大し、最大振れ角に到達した後、急激に減少する。そして、以降の各フレームにおいては、同様に、前記動作を繰り返す。なお、図9では、各フレーム内における可動板421aが一方の方向へ最大角度(最小振れ角)まで回動したと他方の方向へ最大角度(最大振れ角)まで回動したときとの間の可動板421aの回動角の変遷を示している。また、可動板421aの振れ角θ2が、前述したように急激に減少する期間を「垂直帰線期間」と言う。この垂直帰線期間は、隣接する2つのフレーム間近傍に設定される。
【0062】
一方、第2の状態においては、例えば、図8(b)に示すように、描画ラインLの長さが第1の状態における描画ラインLの長さよりも長く設定される。これにより、表示面91上に形成される描画可能領域912の面積は第1の状態における描画可能領域912の面積よりも大きいものとなる。ここで、第2の状態での描画可能領域912は、第1の領域912aと、第1の領域912aに対して水平方向での一方側(図8(b)中の左側)に隣接する第2の領域912bと、第1の領域912aに対して水平方向での他方側(図8(b)中の右側)に隣接する第2の領域912cとで構成される。また、描画ラインLの長さ、すなわち、水平方向での光LLの振れ幅A1は、第1の領域912aの水平方向での長さB1と、第2の領域912bの水平方向での長さB2と、第2の領域912cの水平方向での長さB3との合計よりも若干長いもの(B1+B2+B3+α)となる。
【0063】
以上のようにして、第1の領域912aのみで描画可能領域912が構成される第1の状態と、第1の領域912aおよび第2の領域912b、912cで描画可能領域912が構成される第2の状態とを切り換えることができる。
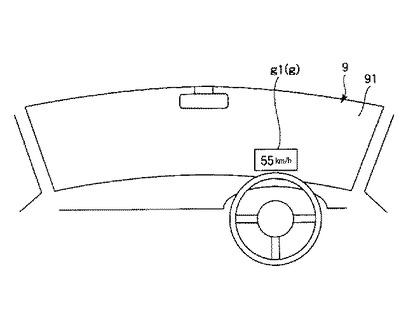
第1の状態では、図7(a)に示すように、第1の領域912aに画像g1が表示される。
【0064】
第2の状態では、図7(b)に示すように、第1の領域912aに画像g1が表示されるとともに、第2の領域912bに画像g2、第2の領域912cに画像g3が表示される。なお、第2の状態において、画像g2および画像g3のうちの少なくとも一方の画像を必要に応じて表示すればよく、第2の領域912bおよび第2の領域912cのうちのうちのいずれか一方の領域に画像が表示されていなくてもよい。
【0065】
また、第1の状態で第1の領域912aに表示される画像g1と、第2の状態で第1の領域912aに表示される画像g1とは、互いに同じ種類であり、第1の領域912aに表示される画像g1と、第2の領域912b、912bに表示される画像とは、互いに異なる種類である。ここで、表示される画像が同じ種類とは、それぞれ同一の指標であることや、それぞれ同一の概念で束ねることができる情報であることを含む。例えば、ともに速度を表す場合であれば同じ種類とみなし、表示される数値が異なっていても同じ種類とすることができる。速度以外に、エンジン回転数、燃料残量、等についても同様である。また、各種計器類の情報(水温、油温、等の警告灯など)は、表示内容が異なっていても各種計器類の情報という概念に含まれていれば同じ種類とみなすことができる。これにより、第1の状態において表示されていなかった画像g2、g3が、第2の状態において画像g1と異なる領域に異なる画像として表示される。従って、第2の状態において、画像g2、g3を画像g1よりも目に付きやすくすることができる。
【0066】
また、画像g1は、移動体Mの移動状態に関する情報を示す画像を含み、第2の領域912b、画像g2、g3は、移動体Mの周囲の外部の状況に関する情報を示す画像を含む。これにより、第1の状態および第2の状態において、移動体Mの移動状態に関する情報を提供可能としつつ、第2の状態において、移動体Mの周囲の外部の状況に関する情報を報知することができる。
【0067】
本実施形態では、画像g1に含まれる画像として、図7に示すように、移動体Mの速度に関する情報を示す画像を用いている。なお、画像g1としては、移動体Mの移動状態に関する情報を示す画像を含むものであれば、これに限定されず、その他、例えば、エンジン回転数、燃料残量、水温、油温等の各種計器類の情報を示す画像を用いることができる。
また、画像g2に含まれる画像としてナビゲーション情報を示す画像、画像g3に含まれる画像として注意情報を示す画像を用いている。なお、画像g2、g3としては、移動体Mの周囲の外部の状況に関する情報を示す画像を含むものであれば、これに限定されない。
【0068】
また、前述したような第1の状態と第2の状態との切り換えは、前述した情報供給部7(具体的には外部センサー71やナビゲーション装置72)からの情報に応じて行われる。すなわち、作動制御装置5は、外部センサー71の検知結果やナビゲーション装置72からの案内情報に基づいて、第1の状態と第2の状態とを切り換える。このように、外部センサー71の検知結果に基づいて第1の状態と第2の状態とを切り換えることにより、移動体Mの周囲の状況を検知し得るとともに、その検知結果を報知することができる。
【0069】
例えば、通常、第1の状態にしておき、移動体Mの前方に人が飛び出してきたときに、その人を外部センサー71が検知し、その検知結果に基づいて、第1の状態から第2の状態へ切り換える。そして、第2の領域912cに、人が飛び出してきた旨の表示、例えば、ピクトグラム、文字、外部センサー71で撮像した画像等を表示する。
また、ナビゲーション装置72からの案内が必要となったときに、第1の状態から第2の状態へ切り換え、第2の領域912bに、ナビゲーション装置72からの案内情報に関する画像を表示する。
【0070】
特に、作動制御装置5は、表示面91に表示される画像の解像度および画素毎の輝度のうちの少なくとも一方を調整する調整手段(発光制御部)を構成する。具体的には、調整手段は、光出射部3から出射される光の出射タイミングおよび光出射部3から出射される光量を調整する機能を有する。そして、調整手段の調整により、第1の領域912aに第1の状態と第2の状態とで視認性の等しい画像g1(互いに大きさ、明るさ、解像度(解像感)の等しい画像)を表示することができる。そのため、描画可能領域912の面積が変化しても、第1の領域912aに表示される画像g1の見た目の変化を小さくすることができ、視認者にとって違和感が少なく見やすい画像を表示することができる。
【0071】
本実施形態では、第1の領域912aに第1の状態と第2の状態とで同じ画像g1を表示するときに、作動制御装置5は、光出射部3から出射する光量を調整することにより、第1の状態で光出射部3から第1の領域912aに出射される単位面積当たりの光量と、第2の状態で光出射部3から第1の領域912aに出射される単位面積当たりの光量とを等しくする。すなわち、作動制御装置5は、第1の状態での画像g1と第2の状態での画像g1との互いに対応する画素毎の輝度を等しくする。これにより、第1の状態および第2の状態で同じ画像g1を表示したときに、その画像g1の明るさが第1の状態と第2の状態との切り換え時に変化するのを防止することができる。そのため、第1の状態および第2の状態の双方の状態でほぼ同じ見え方の画像g1を表示できる、視認者にとって見やすい表示を行うことができる。
【0072】
また、作動制御装置5は、第1の状態で第1の領域912aに表示される画像g1の解像度と、第2の状態で第1の領域912aに表示される画像g1の解像度とを等しくする。本実施形態では、第1の状態で第1の領域912aに表示される画像g1の解像度、および、第2の状態で第1の領域912aに表示される画像g1の解像度は、それぞれ、X[dpi]である。これにより、第1の状態と第2の状態との切り換え時に第1の領域に表示される画像g1の解像度が変化することを低減することができる。結果的に、視認者が画像の解像感の変化を感じにくく、視認者にとって見た目の違和感を低減して見やすい表示を行うことができる。また、比較的簡単に、画像g1の明るさが第1の状態と第2の状態との切り換え時に変化するのを防止することができる。
また、第2の状態において、画像g1の解像度と、画像g2、g3の解像度とを互いに等しくする。これにより、第2の状態における画像g1、g2、g3の解像感の違いを視認者が感じにくくなり、視認者にとって見やすい表示を行うことができる。
【0073】
以上説明したような第1実施形態に係る表示装置1によれば、移動体Mの外部の情報等を表示する必要がある時のみ、描画可能領域912を大きくし、それ以外のときには、描画可能領域912が必要最低限となるように光反射部411eの回動の振幅を抑えることができる。そのため、光反射部911eの回動の振幅が一定である場合に比し、消費電力を抑えることができる。
また、描画可能領域912の水平方向での長さを変更しても、その変化の前後(すなわち第1の状態と第2の状態)で同じ画像を同じ明るさで表示することができる。そのため、視認者にとって違和感の少ない見やすい表示を行うことができる。
【0074】
<第2実施形態>
次に、本発明の表示装置の第2実施形態について説明する。
図12は、本発明の第2実施形態に係る表示装置の動作を説明するための図(描画可能領域、描画領域および画像を説明する図)、図13は、図12に示す描画可能領域を説明する図である。
【0075】
以下、第2実施形態の表示装置について、前述した第1実施形態との相違点を中心に説明し、同様の事項については、その説明を省略する。
第2実施形態の表示装置は、描画可能領域の水平方向での長さを変更せずに描画可能領域の垂直方向での長さを変更する以外は、第1実施形態とほぼ同様である。なお、図12、13にて、前述した実施形態と同様の構成には、同一符号を付してある。
【0076】
本実施形態では、垂直走査用の光スキャナー42の光反射部421eの回動の振幅(振れ角)を変更することにより、描画が可能な領域である描画可能領域912の垂直方向での長さを変更する。
すなわち、光反射部421eの回動の振幅を変更することにより、図13(a)に示すように、表示面91の第1の領域912aに光を走査する第1の状態と、図13(b)に示すように、表示面91の第1の領域912aと第1の領域912aに隣接する第2の領域912d、912eとに光を走査する第2の状態とを切り換える。
【0077】
これにより、移動体Mの外部の情報等を表示する必要がある時のみ、描画可能領域912を大きくし、それ以外のときには、描画可能領域912が必要最低限となるように光反射部421eの回動の振幅を抑えることができる。そのため、光反射部421eの回動の振幅が一定である場合に比し、消費電力を抑えることができる。
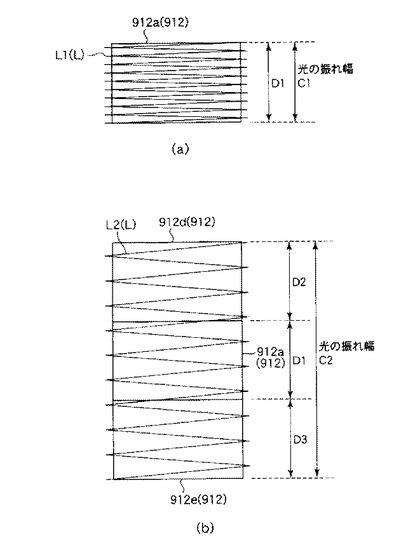
ここで、第1の状態では、垂直方向での光LLの振れ幅C1は、第1の領域912aの垂直方向での長さD1とほぼ等しいものとなる。
【0078】
また、第2の状態での描画可能領域912は、第1の領域912aと、第1の領域912aに対して垂直方向での一方側(図13(b)中の上側)に隣接する第2の領域912dと、第1の領域912aに対して垂直方向での他方側(図13(b)中の下側)に隣接する第2の領域912eとで構成される。また、垂直方向での光LLの振れ幅C2は、第1の領域912aの垂直方向での長さD1と、第2の領域912dの垂直方向での長さD2と、第2の領域912eの垂直方向での長さD3との合計にほぼ等しいものとなる。
【0079】
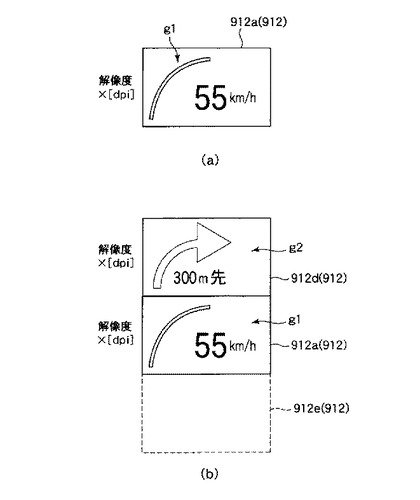
第1の状態では、図12(a)に示すように、第1の領域912aに画像g1が表示される。
第2の状態では、図12(b)に示すように、第1の領域912aに画像g1が表示されるとともに、第2の領域912dに画像g2が表示される。本実施形態では、第2の状態においても、第2の領域912eには画像を表示しない。なお、第2の状態において第2の領域912eに画像を表示してもよい。また、第2の状態において、第2の領域912dには、画像g2および画像g3(図7(b)参照)を選択的に表示してもよい。
【0080】
このように、画像g2を画像g1の上側に表示することにより、第2の状態において、画像g2を画像g1よりも目立たせることができる。
また、第1の状態で第1の領域912aに表示される画像g1の解像度と、第2の状態で第1の領域912aに表示される画像g1の解像度とを等しくする。これにより、第1の状態と第2の状態との切り換え時に第1の領域に表示される画像g1の解像度が変化することを低減することができる。結果的に、視認者が画像の解像感の変化を感じにくく、視認者にとって見た目の違和感を低減して見やすい表示を行うことができる。また、比較的簡単に、画像g1の明るさが第1の状態と第2の状態との切り換え時に変化するのを防止することができる。このとき、本実施形態では、水平走査および垂直走査の周波数が変化しないので、例えば、第2の状態における第1の領域912aを走査するときの光出射部3から出射される光強度を、第1の状態における第1の領域912aを走査するときの光出射部3から出射される光強度よりも強くする。なお、第2の状態における第1の領域912aを走査するときの光出射部3から出射される光強度と、第1の状態における第1の領域912aを走査するときの光出射部3から出射される光強度とを等しくした場合、第2の状態での垂直走査の周波数を第1の状態での垂直走査の周波数よりも高くすればよい。
以上説明したような第2実施形態に係る表示装置によっても、前述した第1実施形態と同様の効果を発揮することができる。
【0081】
<第3実施形態>
次に、本発明の表示装置の第3実施形態について説明する。
図14は、本発明の第3実施形態に係る表示装置に備えられたプロジェクターの光スキャナーを示す模式的平面図、図15は、図14中のB−B線断面図である。なお、以下では、説明の便宜上、図14中の紙面手前側を「上」、紙面奥側を「下」、右側を「右」、左側を「左」と言い、図15中の上側を「上」、下側を「下」、右側を「右」、左側を「左」と言う。
【0082】
以下、第3実施形態の表示装置について、前述した第1実施形態との相違点を中心に説明し、同様の事項については、その説明を省略する。
第3実施形態の表示装置は、プロジェクターが備える光スキャナーの構成が異なる以外は、第1実施形態とほぼ同様である。
本実施形態に係る光走査部は、いわゆる2自由度振動系(2次元走査)の1つの光スキャナー45を有している。
【0083】
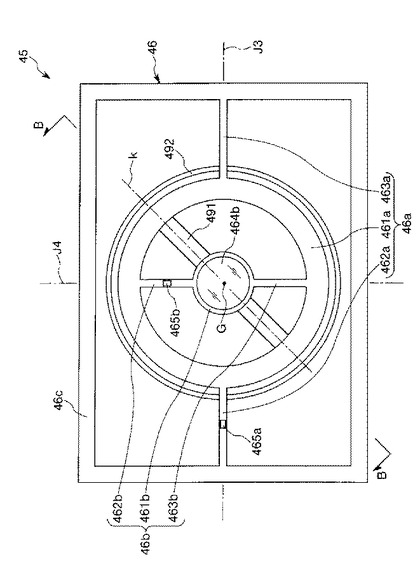
光スキャナー45は、図14に示すような第1の振動系46aと第2の振動系46bと支持部46cとを備える基体46と、基体46と対向配置された対向基板47と、基体46と対向基板47との間に設けられたスペーサー部材48と、永久磁石491と、コイル492とを備えている。
第1の振動系46aは、枠状の支持部46cの内側に設けられた枠状の駆動部461aと、駆動部461aを支持部46cに両持ち支持する1対の第1の連結部462a、463aとで構成されている。
【0084】
第2の振動系46bは、駆動部461aの内側に設けられた可動板461bと、可動板461bを駆動部461aに両持ち支持する1対の第2の連結部462b、463bとで構成されている。
駆動部461aは、図14の平面視にて、円環状をなしている。なお、駆動部461aの形状は、枠状をなしていれば特に限定されず、例えば、図14の平面視にて、四角環状をなしていてもよい。このような駆動部461aの下面には、永久磁石491が接合されている。
【0085】
第1の連結部462a、463aは、それぞれ、長手形状をなしており、弾性変形可能である。第1の連結部462a、463aは、それぞれ、駆動部461aを支持部46cに対して回動可能とするように、駆動部461aと支持部46cとを連結している。このような、第1の連結部462a、463aは、互いに同軸的に設けられており、この軸(以下、「回動中心軸J3」という)を中心として、駆動部461aが支持部46cに対して回動するように構成されている。
【0086】
第1の連結部462aには、駆動部461aの角度(回動中心軸J3まわりの回動角)(挙動)を検出するための圧電素子465aが設けられている。
可動板461bは、図14の平面視にて、円形状をなしている。なお、可動板461bの形状は、駆動部461aの内側に形成することができれば特に限定されず、例えば、図14の平面視にて、楕円形状をなしていてもよいし、四角形状をなしていてもよい。このような可動板461bの上面には、光反射性を有する光反射部464bが形成されている。
【0087】
第2の連結部462b、463bは、それぞれ、長手形状をなしており、弾性変形可能である。第2の連結部462b、463bは、それぞれ、可動板461bを駆動部461aに対して回動可能とするように、可動板461bと駆動部461aとを連結している。このような第2の連結部462b、463bは、互いに同軸的に設けられており、この軸(以下、「回動中心軸J4」という)を中心として、可動板461bが駆動部461aに対して回動するように構成されている。
第2の連結部462bには、可動板461bの角度(回動中心軸J4まわりの回動角)(挙動)を検出するための圧電素子465bが設けられている。
【0088】
図14に示すように、回動中心軸J3と回動中心軸J4とは、互いに直交している。また、駆動部461aおよび可動板461bの中心は、それぞれ、図14の平面視にて、回動中心軸J3と回動中心軸J4との交点上に位置している。なお、以下、説明の便宜上、回動中心軸J3と回動中心軸J4との交点を「交点G」ともいう。
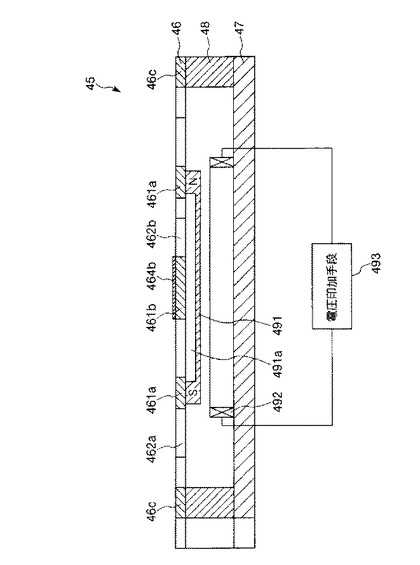
図15に示すように、以上のような基体46は、スペーサー部材48を介して対向基板47と接合している。対向基板47の上面には、永久磁石491に作用する磁界を発生させるコイル492が設けられている。
【0089】
永久磁石491は、図14の平面視にて、交点Gを通り、回動中心軸J3および回動中心軸J4のそれぞれの軸に対して傾斜した線分(この線分を「線分k」とも言う)に沿って設けられている。このような永久磁石491は、交点Gに対して長手方向の一方側がS極、他方側がN極となっている。図15では、永久磁石491の長手方向の左側がS極、右側がN極となっている。
【0090】
図14の平面視にて、線分kの回動中心軸J3に対する傾斜角θは、30〜60度であるのが好ましく、40〜50度であるのがより好ましく、ほぼ45度であるのがさらに好ましい。このように永久磁石491を設けることで、円滑に、可動板461bを回動中心軸J3および回動中心軸J4のそれぞれの軸まわりに回動させることができる。本実施形態では、線分kは、回動中心軸J3および回動中心軸J4のそれぞれの軸に対して約45度傾斜している。
【0091】
また、図15に示すように、永久磁石491の上面には、凹部491aが形成されている。この凹部491aは、永久磁石491と可動板461bとの接触を防止するための逃げ部である。このような凹部491aを形成することにより、可動板461bが回動中心軸J3まわりに回動する際、永久磁石491と接触してしまうことを防止することができる。
【0092】
コイル492は、図14の平面視にて、駆動部461aの外周を囲むように形成されている。これにより、光スキャナー45の駆動の際、駆動部461aとコイル492との接触を確実に防止することができる。その結果、コイル492と永久磁石491との離間距離を比較的短くすることができ、コイル492から発生する磁界を効率的に永久磁石491に作用させることができる。
【0093】
コイル492は、電圧印加手段493と電気的に接続されていて、電圧印加手段493によりコイル492に電圧が印加されると、コイル492から回動中心軸J3および回動中心軸J4のそれぞれの軸に直交する軸方向の磁界が発生する。
電圧印加手段493は、可動板461bを回動中心軸J3まわりに回動させるための第1の電圧と、可動板461bを回動中心軸J4まわりに回動させるための第2の電圧とをそれぞれ発生させ、その第1の電圧と第2の電圧とを重畳し、その重畳した電圧をコイル492に印加する。
【0094】
すると、第1の電圧に基づいて、永久磁石491のS極側をコイル492に引き付けようとするとともに、N極側をコイル492から離間させようとする磁界と、永久磁石491のS極側をコイル492から離間させようとするとともに、N極側をコイル492に引き付けようとする磁界とが交互に切り換わる。これにより、第1の連結部462a、463aを捩れ変形させつつ、駆動部461aが可動板461bとともに、第1の電圧の周波数で回動中心軸J3まわりに回動する。
【0095】
一方、第2の電圧に基づいて、永久磁石491のS極側をコイル492に引き付けようとするとともに、N極側をコイル492から離間させようとする磁界と、永久磁石491のS極側をコイル492から離間させようとするとともに、N極側をコイル492に引き付けようとする磁界とが交互に切り換わる。これにより、第2の連結部462b、463bを捩れ変形させつつ、可動板461bが第2の電圧の周波数で回動中心軸J4まわりに回動する。
【0096】
以上のような光スキャナー45によれば、1つのアクチュエーターで2次元的にレーザー光(光)を走査でき、光走査部4の省スペース化を図ることができる。また、例えば、第1実施形態のように1対の光スキャナーを用いる場合には、これら光スキャナーの相対的位置関係を高精度に設定しなければならないが、本実施形態ではその必要がないため、製造の容易化を図ることができる。
このような第3実施形態によっても、第1実施形態と同様の効果を発揮することができる。
【0097】
以上、本発明の表示装置を、図示の実施形態に基づいて説明したが、本発明はこれに限定されるものではなく、各部の構成は、同様の機能を有する任意の構成のものに置換することができる。また、本発明に、他の任意の構成物が付加されていてもよい。また、本発明は、前記各実施形態のうちの、任意の2以上の構成(特徴)を組み合わせたものであってもよい。
【0098】
また、前述した実施形態では、描画可能領域912の左上から右下まで描画することを繰り返して複数のフレームの画像を表示する場合を説明したが、描画可能領域912の左上から右下まで描画するフレームと、描画可能領域912の右下から左上まで描画するフレームとを交互に繰り返して、複数のフレームの画像を表示してもよい。この場合、偶数番目のフレームと奇数番目のフレームとでは、映像データ記憶部51から読み出される映像データ(画素データ)の順番を逆にすればよい。
【0099】
また、本実施形態では、各フレームについて描画を開始する位置が左上である場合を説明したが、これに限らず、例えば、各フレームについて描画を開始する位置は、右上、左下、右下等であってもよい。
また、必要に応じて、垂直方向および水平方向の少なくとも一方の方向における可動板の振れ角を調整するか、あるいは、光出射部の変調を調整して、いわゆる台形補正を行うことも可能である。
【0100】
また、前記第1実施形態では、光走査部として、1対の光スキャナーを用いたが、これに限定されず、例えば光スキャナーと、ガルバノミラーとを用いてもよい。この場合には、ガルバノミラーを垂直走査用とするのが好ましい。
また、前述した実施形態では、表示装置が1つのプロジェクターを備える場合を説明したが、これに限定されず、表示装置が備えるプロジェクターの数は、2つ以上であってもよい。この場合、複数のプロジェクターを同期させて作動させることができる。
【0101】
また、本実施形態では、第1の方向を「水平方向」、第2の方向を「垂直方向」としたが、本発明では、これに限らず、例えば、第1の方向を「垂直方向」、第2の方向を「水平方向」としてもよい。
また、前記実施形態では、3つのダイクロイックミラーを用いて、赤色レーザー光、緑色レーザー光、青色レーザー光を結合して1つのレーザー光(光)を出射しているが、ダイクロイックプリズム等を用いて結合しても良い。
【0102】
また、前述した実施形態では、光源ユニット3が、赤色のレーザーを出射するレーザー光源と、青色のレーザーを出射するレーザー光源と、緑色のレーザーを出射するレーザー光源とを有する構成について説明したが、これに限定されず、例えば、赤色のレーザーを出射するレーザー光源と、青色のレーザーを出射するレーザー光源と、紫外のレーザーを出射するレーザー光源とを備えていてもよい。この場合、表示面に、紫外レーザーが照射されることにより緑色の蛍光を発生する蛍光体を含んでおく。これにより、表示面にフルカラーの画像を表示することができる。
【0103】
また、前述した実施形態では、第1の領域の解像度が第1の状態と第2の状態とで等しい場合を例に説明したが、第1の領域の解像度が第1の状態と第2の状態とで異なっていてもよい。この場合、第1の状態および第2の状態のうちの少なくとも一方の状態において、第1の領域に表示される画像の画素毎の輝度を調整する(増加または減少させる)ことにより、第1の領域に第1の状態と第2の状態とで視認性の等しい画像を表示することができる。例えば、第1の状態での第1の領域の画像の解像度が第2の状態での第1の領域の画像の解像度よりも高い場合、第2の状態での第1の領域の画像の画素毎の輝度を第1の状態での第1の領域の画像の画素毎の輝度よりも強くする。
また、前述した実施形態では、移動体が車両(自動車)である場合を例に説明したが、本発明では、これに限らず、移動体は、例えば、列車、飛行体、船等であってもよい。飛行体としては、例えば、旅客機、戦闘機等の飛行機、ヘリコプター、飛行船等が挙げられる。
【符号の説明】
【0104】
1……表示装置 2……プロジェクター 3……光源ユニット 4……光走査部 5……作動制御装置 7……情報供給部 9……ウインドシールド 9A……仮想面 31b……レーザー光源 31g……レーザー光源 31r……レーザー光源 32b……コリメーターレンズ 32g……コリメーターレンズ 32r……コリメーターレンズ 33b……ダイクロイックミラー 33g……ダイクロイックミラー 33r……ダイクロイックミラー 41……光スキャナー 42……光スキャナー 43……角度検出手段 44……角度検出手段 45……光スキャナー 46……基体 46a……第1の振動系 46b……第2の振動系 46c……支持部 47……対向基板 48……スペーサー部材 51……映像データ記憶部 52……映像データ演算部 53……描画タイミング生成部 54……光源変調部 55……振れ角演算部 56……角度指示部 71……外部センサー 72……ナビゲーション装置 91……表示面 100……表示システム 310r、310g、310b……駆動回路 320b……光源 320g……光源 320r……光源 411……基体 411a……可動板 411b……支持部 411c……連結部 411d……連結部 411e……光反射部 412……スペーサー部材 413……対向基板 414……永久磁石 415……コイル 416……電圧印加手段 417……駆動手段 421a……可動板 421e……光反射部 427……駆動手段 431……圧電素子 432……起電力検出部 433……角度検知部 461a……駆動部 461b……可動板 462a、463a……第1の連結部 462b、463b……第2の連結部 464b……光反射部 465a……圧電素子 465b……圧電素子 491……永久磁石 491a……凹部 492……コイル 493……電圧印加手段 911……描画領域 912……描画可能領域 912a〜912e……領域 BB……青色レーザー光 G……交点 g、g1、g2、g3……画像 GG……緑色レーザー光 J1……回動中心軸 J2……回動中心軸 J3……回動中心軸 J4……回動中心軸 L……描画ライン LL……レーザー光 M……移動体 k……線分 RR……赤色レーザー光
【技術分野】
【0001】
本発明は、表示装置に関する。
【背景技術】
【0002】
例えば、車両のウインドシールドに計器やナビゲーション等の各種情報に関する画像を表示するヘッドアップディスプレイ(HUD)としては、スクリーンに対して光を2次元的に走査することにより画像を表示するスキャンタイプのプロジェクションシステム(Laser Scan Projection:LSP)と呼ばれる表示装置を用いたものが知られている(例えば、特許文献1参照)。
このような表示装置には、光を1次元または2次元に走査する光スキャナーが設けられている。例えば、特許文献1に記載の表示装置では、鏡面部を互いに直交する2つの回転軸まわりにそれぞれ回動させることにより光を2次元に走査する光スキャナーを備える。
【0003】
しかし、このような表示装置では、常に、光スキャナーの走査範囲(例えば、特許文献1では、鏡面部の回動の振幅)が一定であるため、画像を表示可能な領域である描画可能領域の形状および大きさが一定である。
そのため、表示する画像の形状(外形)や大きさによっては、描画可能領域のうち画像の形成されていない領域の面積が大きくなってしまう場合があった。このような場合、1フレーム中における画像の描画を行う期間の割合(いわゆる時間開口率)が低下してしまう。このような時間開口率の低下は、エネルギー効率の低下を意味する。
特に、HUDのような表示装置においては、随時表示する画像(例えば速度計を示す画像)とは異なる領域に適時必要な画像(例えば危険を知らせる画像)を表示するが、その適時必要な画像が表示される領域は、画像を表示しない期間が比較的長い。そのため、エネルギー効率が極めて低くなり、消費電力の増大を招いてしまう。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2009−137491号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
本発明の目的は、消費電力を抑えることができる表示装置を提供することにある。
【課題を解決するための手段】
【0006】
このような目的は、下記の本発明により達成される。
本発明の表示装置は、光を出射する光出射部と、
前記光出射部から出射した光を反射させる少なくとも1つの光反射部が回動中心軸まわりに回動可能に設けられ、かつ、画像が表示される表示面上にて、前記光反射部で反射した光を第1の方向に走査するとともに前記第1の方向に直交する第2の方向に前記第1の方向に走査する速度よりも遅い速度で走査する光走査部と、
前記光反射部の回動の振幅を変更する振幅変更部と、
前記光出射部からの光の出射タイミングおよび前記光出射部から出射される光量を調整する発光制御部と、を有し、
前記振幅変更部が前記光反射部の回動の振幅を変更することにより、前記表示面の第1の領域に光を走査する第1の状態と、前記表示面の前記第1の領域と前記第1の領域と異なる第2の領域とに光を走査する第2の状態とを切り換え、
前記発光制御部が前記光出射部から出射する光量を調整することにより、前記第1の領域の単位面積当たりの光量を前記第1の状態と前記第2の状態とで等しくすることを特徴とする。
このような表示装置によれば、必要時のみ、描画可能領域を大きくし、それ以外のときには、描画可能領域が必要最低限となるように光反射部の回動の振幅を抑えることができる。そのため、光反射部の回動の振幅が一定である場合に比し、消費電力を抑えることができる。
【0007】
本発明の表示装置では、前記発光制御部は、前記光出射部からの光の出射タイミングを調整することにより、前記第1の状態で前記第1の領域に表示される画像の解像度と、前記第2の状態で前記第1の領域に表示される画像の解像度とを等しくすることが好ましい。
これにより、第1の状態と第2の状態との切り換え時に第1の領域に表示される画像の解像度が変化することを低減することができる。
【0008】
本発明の表示装置では、前記第1の状態で前記第1の領域に表示される画像と、前記第2の状態で前記第1の領域に表示される画像とは、互いに同じ種類であり、
前記第1の領域に表示される画像と、前記第2の領域に表示される画像とは、互いに異なる種類であることが好ましい。
これにより、第2の状態において、第2の領域に表示される画像を、第1の領域に表示される画像よりも目に付きやすくすることができる。
【0009】
本発明の表示装置では、前記第1の領域に表示される画像は、前記表示装置を備える移動体の移動状態に関する情報を示す画像を含み、
前記第2の領域に表示される画像は、前記移動体の外部の状況に関する情報を示す画像を含むことが好ましい。
これにより、第1の状態および第2の状態において、表示装置を備える移動体の移動状態に関する情報を提供可能としつつ、第2の状態において、移動体の外部の状況に関する情報を報知することができる。
【0010】
本発明の表示装置では、前記移動体の外部の状況を検知する状況検知部を有し、
前記振幅変更部は、前記状況検知部の検知結果に基づいて、前記第1の状態と前記第2の状態とを切り換えることが好ましい。
これにより、移動体の外部の状況を検知し得るとともに、その検知結果を報知することができる。
【0011】
本発明の表示装置では、前記振幅変更部は、前記第1の方向に光を走査する前記光反射部の回動の振幅を変更することが好ましい。
これにより、描画可能領域の第1の方向での長さを変更することができる。
本発明の表示装置では、前記振幅変更部は、前記第2の方向に光を走査する前記光反射部の回動の振幅を変更することが好ましい。
これにより、描画可能領域の第2の方向での長さを変更することができる。
【0012】
本発明の表示装置では、前記光走査部は、周期的に変化する電流または電圧の供給により前記光反射部を回動させる駆動部を備え、
前記振幅変更部は、前記駆動部に供給する前記電流または前記電圧の大きさおよび周波数を調整することにより、前記光反射部の回動の振幅を変更することが好ましい。
これにより、比較的簡単かつ確実に、光反射部の回動の振幅を変更することができる。
本発明の表示装置では、前記光出射部は、レーザー光を出射することが好ましい。
これにより、平行光とするためのレンズ等の光学系を簡略化または小型化することができるため、光出射部の小型化、ひいては、画像形成装置の小型化を図ることができる。
【図面の簡単な説明】
【0013】
【図1】本発明の第1実施形態に係る表示装置(ヘッドアップディスプレイ)を備える表示システム(ヘッドアップディスプレイシステム)を示す概略図である。
【図2】図1に示す表示システムの概略を説明するための図である。
【図3】図1に示す表示システムに備えられた表示装置の概略構成を示す模式図である。
【図4】図3に示す表示装置の光走査部に備えられた光スキャナーの部分断面斜視図である。
【図5】図4に示す光スキャナーの動作を説明する断面図である。
【図6】図3に示す表示装置の制御系(作動制御装置、光走査部および光源ユニット)を示すブロック図である。
【図7】図3に示す表示装置の動作を説明するための図(描画可能領域、描画領域および画像を説明する図)である。
【図8】図7に示す描画可能領域を説明する図である。
【図9】図3に示す表示装置の光スキャナー(垂直走査用の光スキャナー)の可動板の振れ角の変遷を示すグラフである。
【図10】図3に示す表示装置の光スキャナー(水平走査用の光スキャナー)の可動板の振れ角の変遷(第1の状態)を示すグラフである。
【図11】図3に示す表示装置の光スキャナー(水平走査用の光スキャナー)の可動板の振れ角の変遷(第2の状態)を示すグラフである。
【図12】本発明の第2実施形態に係る表示装置の動作を説明するための図(描画可能領域、描画領域および画像を説明する図)である。
【図13】図12に示す描画可能領域を説明する図である。
【図14】本発明の第3実施形態に係る表示装置に備えられたプロジェクターの光スキャナーを示す模式的平面図である。
【図15】図14中のB−B線断面図である。
【発明を実施するための形態】
【0014】
以下、本発明の表示装置の好適な実施形態について、添付図面を参照しつつ説明する。
<第1実施形態>
図1は、本発明の第1実施形態に係る表示装置(ヘッドアップディスプレイ)を備える表示システム(ヘッドアップディスプレイシステム)を示す概略図、図2は、図1に示す表示システムの概略を説明するための図、図3は、図1に示す表示システムに備えられた表示装置の概略構成を示す模式図、図4は、図3に示す表示装置の光走査部に備えられた光スキャナーの部分断面斜視図、図5は、図4に示す光スキャナーの動作を説明する断面図、図6は、図3に示す表示装置の制御系(作動制御装置、光走査部および光源ユニット)を示すブロック図、図7は、図3に示す表示装置の動作を説明するための図(描画可能領域、描画領域および画像を説明する図)、図8は、図7に示す描画可能領域を説明する図、図9は、図3に示す表示装置の光スキャナー(垂直走査用の光スキャナー)の可動板の振れ角の変遷を示すグラフ、図10は、図3に示す表示装置の光スキャナー(水平走査用の光スキャナー)の可動板の振れ角の変遷(第1の状態)を示すグラフ、図11は、図3に示す表示装置の光スキャナー(水平走査用の光スキャナー)の可動板の振れ角の変遷(第2の状態)を示すグラフである。なお、以下では、説明の便宜上、図5中の上側を「上」、下側を「下」、右側を「右」、左側を「左」と言う。
【0015】
図1に示す表示システム100は、移動体Mに設置された表示装置1を備え、表示装置1が移動体Mのウインドシールド(フロントウインドウ)9に光を投影することにより画像を表示する。
本実施形態では、移動体Mは、車両である。その移動体Mの操縦者は、ウインドシールド9に対して前方に位置する仮想面9Aに虚像として画像(図2に示す画像g)を視認することができる。
【0016】
図3に示すように、表示装置1は、ウインドシールド9の表示面91に光を走査させて画像を表示する(描画する)プロジェクター2と、プロジェクター2の駆動を制御する作動制御装置5と、情報供給部7とで構成されている。
このような表示装置1では、作動制御装置5が情報供給部7からの情報に基づいてプロジェクター2の作動を制御し、ウインドシールド9の表示面91上に画像を表示する。
【0017】
以下、表示装置1を構成する各部を順次詳細に説明する。
(プロジェクター)
まず、プロジェクター2について説明する。
プロジェクター2は、表示面91に形成される描画領域911に、光を走査することにより画像を表示するように構成されている。
具体的には、図1に示すように、プロジェクター2は、光を出射する光源ユニット(光出射部)3と、表示面91に対して光源ユニット3から出射した光を走査する光走査部4とを有している。
【0018】
[光源ユニット(光出射部)]
図3に示すように、光源ユニット3は、各色のレーザー光源31r、31g、31bと、各色のレーザー光源31r、31g、31bに対応して設けられたコリメーターレンズ32r、32g、32bおよびダイクロイックミラー33r、33g、33bとを備えている。
【0019】
また、各色のレーザー光源31r、31g、31bは、それぞれ、駆動回路310r、310g、310bと、赤色の光源320r、緑色の光源320g、青色の光源320bとを有しており(図6参照)、図3に示すように、赤色、緑色および青色のレーザー光RR、GG、BBを出射する。レーザー光RR、GG、BBは、それぞれ、作動制御装置5の後述する光源変調部54から送信される駆動信号に対応して変調された状態で出射され、コリメート光学素子であるコリメーターレンズ32r、32g、32bによって平行化されて細いビームとされる。
ダイクロイックミラー33r、33g、33bは、それぞれ、赤色レーザー光RR、緑色レーザー光GG、青色レーザー光BBを反射する特性を有し、各色のレーザー光RR、GG、BBを結合して1つのレーザー光(光)LLを出射する。
【0020】
なお、コリメーターレンズ32r、32g、32bに代えてコリメーターミラーを用いることができ、この場合も、平行光束の細いビームを形成することができる。また、各色のレーザー光源31r、31g、31bから平行光束が出射される場合、コリメーターレンズ32r、32g、32bは、省略することができる。さらに、レーザー光源31r、31g、31bについては、同様の光束を発生する発光ダイオード等の光源に置換することができる。また、図3の各色のレーザー光源31r、31g、31b、コリメーターレンズ32r、32g、32b、およびダイクロイックミラー33r、33g、33bの順番はあくまで1例である。従って、各色の組み合わせ(赤色はレーザー光源31r、コリメーターレンズ32r、ダイクロイックミラー33r、緑色はレーザー光源31g、コリメーターレンズ32g、ダイクロイックミラー33g、青色はレーザー光源31b、コリメーターレンズ32b、ダイクロイックミラー33b)を保持したままその順序は自由に設定できる。例えば、光走査部4に近い順に、青色、赤色、緑色という組み合わせも可能である。
【0021】
このような光源ユニット3は、前述したようにレーザー光を出射するので、後述するように光反射部411eの振れ角を変更しても画像が暈けるのを簡単に防止することができる。また、このような光源ユニット3を用いたプロジェクター2は、フォーカスフリーで、近接投射が可能であるとともに、投射位置を設置位置に限定されず任意の位置に調整することができる。また、レーザー光を用いると、平行光とするためのレンズ等の簡略化または小型化することができるため、光出射部の小型化、ひいては、表示装置1の小型化を図ることができる。
【0022】
[光走査部]
次に、光走査部4について説明する。
光走査部4は、光源ユニット3から出射したレーザー光LLを表示面91に対し、水平方向(第1の方向)に走査(水平走査:主走査)すると共に、水平方向の走査速度(第1の速度)よりも遅い走査速度(第2の速度)で垂直方向(第1の方向に直交する第2の方向)に走査(垂直走査:副走査)することで2次元的に走査するものである。
【0023】
この光走査部4は、光源ユニット3から出射したレーザー光LLを表示面91に対し、水平方向に走査する水平走査用ミラーである光スキャナー(第1の方向走査部)41と、光スキャナー41の後述する可動板411aの角度(挙動)を検出する角度検出手段(挙動検出手段)43と、光源ユニット3から出射したレーザー光LLを表示面91に対し、垂直方向に走査する垂直走査用ミラーである光スキャナー(第2の方向走査部)42と、光スキャナー42の後述する可動板421aの角度(挙動)を検出する角度検出手段(挙動検出手段)44とを有している。
【0024】
以下、光スキャナー41、42の構成について説明するが、光スキャナー41、42は、互いに同様の構成であるため、以下では光スキャナー41について代表して説明し、光スキャナー42については、その説明を省略する。
図2に示すように、光スキャナー41は、いわゆる1自由度振動系(1次元走査)のものであり、基体411と、基体411の下面に対向するよう設けられた対向基板413と、基体411と対向基板413との間に設けられたスペーサー部材412とを有している。
【0025】
基体411は、可動板411aと、可動板411aを回動可能に支持する支持部411bと、可動板411aと支持部411bとを連結する1対の連結部411c、411dとを有している。換言すれば、支持部411bは1対の連結部411c、411dを支持しているとも言え、支持部411bは1対の連結部411c、411dを介して可動板411aを支持していると言える。
【0026】
可動板411aは、その平面視にて、略長方形状をなしている。このような可動板411aの上面には、光反射性を有する光反射部(ミラー)411eが設けられている。光反射部411eは、例えば、Al、Ni等の金属膜で構成されている。また、可動板411aの下面には、永久磁石414が設けられている。
支持部411bは、可動板411aの平面視にて、可動板411aの外周を囲むように設けられている。すなわち、支持部411bは、枠状をなしていて、その内側に可動板411aが位置している。
【0027】
連結部411cは、可動板411aの左側にて、可動板411aと支持部411bとを連結し、連結部411dは、可動板411aの右側にて、可動板411aと支持部411bとを連結している。
連結部411c、411dは、それぞれ、長手形状をなしている。また、連結部411c、411dは、それぞれ、弾性変形可能である。このような1対の連結部411c、411dは、互いに同軸的に設けられており、この軸(以下「回動中心軸J1」と言う)まわりに、可動板411aが支持部411bに対して回動する。
【0028】
このような基体411は、例えば、シリコンを主材料として構成されていて、可動板411aと支持部411bと連結部411c、411dとが一体的に形成されている。このように、シリコンを主材料とすることにより、優れた回動特性を実現できるとともに、優れた耐久性を発揮することができる。また、シリコンは微細な加工が可能であるため、基体411をシリコンを主材料として構成することにより、基体411の寸法精度を優れたものとし、光スキャナー41の振動特性を優れたものとすることができる。また、光スキャナー41の小型化を図ることができる。
【0029】
スペーサー部材412は、枠状をなしていて、その上面が基体411の下面と接合している。また、スペーサー部材412は、可動板411aの板厚方向からの平面視にて、支持部411bの形状とほぼ等しくなっている。このようなスペーサー部材412は、例えば、各種ガラス、各種セラミックス、シリコン、SiO2などで構成されている。
なお、スペーサー部材412と基体411との接合方法としては、特に限定されず、例えば、接着剤等の別部材を介して接合してもよいし、スペーサー部材412の構成材料などによっては直接接合や陽極接合などを用いてもよい。
【0030】
対向基板413は、スペーサー部材412と同様に、例えば、各種ガラス、シリコン、SiO2などで構成されている。このような対向基板413の上面であって、可動板411aと対向する部位には、コイル415が設けられている。
永久磁石414は、板棒状をなしていて、可動板411aの下面に沿って設けられている。このような永久磁石414は、可動板411aの平面視にて、回動中心軸J1に対して直交する方向に磁化(着磁)されている。すなわち、永久磁石414は、両極(S極、N極)を結んだ線分が、回動中心軸J1に対して直交するよう設けられている。
【0031】
このような永久磁石414としては、特に限定されず、例えば、ネオジム磁石、フェライト磁石、サマリウムコバルト磁石、アルニコ磁石などを用いることができる。
コイル415は、可動板411aの平面視にて、永久磁石414の外周を囲むように設けられている。
また、光スキャナー41は、コイル415に電圧を印加する電圧印加手段416を有している。電圧印加手段416は、印加する電圧の電圧値や周波数等の各条件を調整(変更)し得るように構成されている。電圧印加手段416、コイル415および永久磁石414により、可動板411aを回動させる駆動手段(駆動部)417が構成される。
コイル415には、電圧印加手段416から所定の電圧が印加され、所定の電流が流れる。
【0032】
例えば、電圧印加手段416からコイル415に交番電圧を印加すると、それに応じて電流が流れ、可動板411aの厚さ方向(図2中上下方向)の磁界が発生し、かつ、その磁界の向きが周期的に切り換わる。すなわち、コイル415の上側付近がS極、下側付近がN極となる状態Aと、コイル415の上側付近がN極、下側付近がS極となる状態Bとが交互に切り換わる。その際、電圧印加手段416は、後述する作動制御装置5により駆動制御される。
状態Aでは、図5(a)に示すように、永久磁石414の右側の部分が、コイル415への通電により発生する磁界との反発力により上側へ変位するとともに、永久磁石414の左側の部分が、前記磁界との吸引力により下側へ変位する。これにより、可動板411aが反時計回りに回動して傾斜する。
一方、状態Bでは、図5(b)に示すように、永久磁石414の右側の部分が下側へ変位するとともに、永久磁石414の左側の部分が上側へ変位する。これにより、可動板411aが時計回りに回動して傾斜する。
【0033】
このような状態Aと状態Bとを交互に繰り返すことにより、連結部411c、411dを捩り変形させながら、可動板411aが回動中心軸J1まわりに回動(振動)する。
また、後述する作動制御装置5の制御により、電圧印加手段416からコイル415に印加する電圧を調整することにより、流れる電流を調整することができ、これにより、可動板411a(光反射部411eの反射面)の回動中心軸J1まわりの回動の振れ角(振幅)を調整することができる。
【0034】
なお、このような光スキャナー41の構成としては、可動板411aを回動させることができれば、特に限定されず、例えば、2自由度振動系を有するものであってもよく、また、光スキャナー41の駆動方式は、コイル415と永久磁石414とを用いた電磁駆動に代えて、例えば、圧電素子を用いた圧電駆動や、静電引力を用いた静電駆動等であってもよい。
【0035】
図3に示すように、上述のような構成の光スキャナー41、42は、互いの回動中心軸J1、J2の方向が直交するように設けられている。光スキャナー41、42をこのように設けることにより、表示面91に対し、光源ユニット3から出射したレーザー光LLを2次元的に(互いに直交する2方向に)走査することができる。これにより、比較的簡単な構成で、表示面91に2次元画像を描画することができる。
【0036】
具体的に説明すれば、光源ユニット3から出射した光は、光スキャナー41の光反射部411eの反射面で反射し、次いで、光スキャナー42の光反射部421eの反射面で反射し、表示面91に投射(照射)される。このとき、光スキャナー41の光反射部411eを回動させるとともに、その角速度(速度)よりも遅い角速度で光スキャナー42の光反射部421eを回動させる。これにより、光源ユニット3から出射したレーザー光LLは、表示面91に対し、水平方向に走査されるとともに、その水平方向の走査速度よりも遅い走査速度で垂直方向に走査される。このようにして、光源ユニット3から出射したレーザー光LLは、表示面91に対し、2次元的に走査され、表示面91に画像が描画される。
【0037】
ここで、光スキャナー41の光反射部411eの角速度よりも遅い角速度で光スキャナー42の光反射部421eを回動させるために、例えば、光スキャナー41を共振を利用した共振駆動とし、光スキャナー42を共振を利用しない非共振駆動としてもよい。また、光スキャナー41、42をともに共振駆動とする場合には、光スキャナー41の共振周波数(可動板411aおよび連結部411c、411dからなる振動系の共振周波数)が、光スキャナー42の共振周波数よりも高くなるように光スキャナー41、42を設計すればよい。
なお、光源ユニット3から出射した光が、先に、光スキャナー42の光反射部421eで反射し、次に、光スキャナー41の光反射部411eで反射するようになっていてもよい。すなわち、先に、垂直走査がなされ、次に、水平走査がなされるように構成されていてもよい。
【0038】
次に、光スキャナー41の可動板411aの角度を検出する角度検出手段43について説明する。なお、光スキャナー42の可動板421aの角度を検出する角度検出手段44は、角度検出手段43と同様の構成であるため、その説明を省略する。
図4に示すように、角度検出手段43は、光スキャナー41の連結部411c上に設けられた圧電素子431と、圧電素子431から発生する起電力を検出する起電力検出部432と、起電力検出部432の検出結果に基づいて可動板411aの角度を求める(挙動を検知する)角度検知部433とを有している。
【0039】
圧電素子431は、可動板411aの回動に伴って連結部411cが捩り変形すると、それに伴って変形する。圧電素子431は、外力が付与されていない自然状態から変形すると、その変形量に応じた大きさの起電力を発生する性質(言い換えると、変形量に応じて抵抗値が変化する性質)を有しているため、角度検知部433は、起電力検出部432で検出された起電力(または抵抗値)の大きさに基づいて、連結部411cの捩れの程度を求め、さらに、その捩れの程度から可動板411a(光反射部411eの反射面)の角度を求める。また、角度検知部433は、可動板411aの回動中心軸J1を中心とする振れ角(最大振れ角)を求める。この可動板411aの角度および振れ角の情報を含む信号は、角度検知部433から作動制御装置5に送信される。
【0040】
なお、前記検出する可動板411aの角度の基準(0°)は、光スキャナー41の状態がいかなるものであってもよいが、例えば、光スキャナー41が初期状態(コイル415に電圧が印加されていない状態)であるときに設定することができる。
また、前記可動板411aの角度の検出は、リアルタイムで(連続的に)行ってもよく、また、間欠的に行ってもよい。また、角度検出手段43としては、可動板411aの角度を検出することができれば、本実施形態のような圧電素子を用いたものに限定されず、例えば、光学センサーを用いてもよい。
【0041】
[作動制御装置]
次に、作動制御装置5について説明する。
図6に示すように、作動制御装置5は、画像を描画する際に用いられる映像データ(画像データ)を記憶する映像データ記憶部(映像データ記憶手段)51と、映像データ演算部52と、描画タイミング生成部53と、光源変調部(光変調部)54と、振れ角演算部(振幅演算部)55と、角度指示部56とを有している。
特に、この作動制御装置5は、水平方向(第1の方向)に走査する可動板411aの光反射部411eの回動の振幅(振れ角)を変更する変更手段(振幅変更部)を構成する。
このような作動制御装置5は、光反射部411eの回動の振幅(振れ角)を変更することにより、描画が可能な領域である描画可能領域912の水平方向での長さを変更する。
【0042】
すなわち、作動制御装置5が光反射部411eの回動の振幅を変更することにより、図7(a)に示すように、表示面91の第1の領域912aに光を走査する第1の状態と、図7(b)に示すように、表示面91の第1の領域912aと第1の領域912aと異なって隣接している第2の領域912b、912cとに光を走査する第2の状態とを切り換える。
これにより、必要時のみ、描画可能領域912を大きくし、それ以外のときには、描画可能領域912が必要最低限となるように光反射部411eの回動の振幅を抑えることができる。そのため、光反射部911eの回動の振幅が一定である場合に比し、消費電力を抑えることができる。
【0043】
以下、作動制御装置5について詳述する。
作動制御装置5によるプロジェクター2の制御においては、まず、プロジェクター2に映像データが入力される。入力された映像データは映像データ記憶部51に一時的に記憶され、その映像データ記憶部51から読み出された映像データを用いて画像の描画が行われる。この場合、映像データのすべてが映像データ記憶部51に記憶された後に、画像の描画を開始してもよく、また、映像データの一部が映像データ記憶部51に記憶された後に、画像の描画を開始し、その画像の描画と並行して続きの映像データを映像データ記憶部51に記憶するようにしてもよい。
【0044】
映像データの一部が映像データ記憶部51に記憶された後に画像の描画を開始する場合は、初めに、少なくとも1フレーム分の映像データを映像データ記憶部51に記憶し、その後に画像の描画を開始する。
描画タイミング生成部53では、描画タイミング情報および描画ライン情報がそれぞれ生成される。描画タイミング情報は、映像データ演算部52に送出され、描画ライン情報は、振れ角演算部55および角度指示部56に送出される。
【0045】
描画タイミング情報には、描画を行うタイミング(画素毎の光の出射タイミング)の情報、画素毎の光の強度(表示面での光の単位面積当たりの強度)の情報等が含まれる。また、描画ライン情報には、図8に示す描画を行う描画ラインLの垂直方向の位置(可動板421aの目標角度)の情報、および、描画ラインLの長さ(可動板411aの目標角度)情報等が含まれる。なお、描画ラインLのいずれの部位の位置を前記描画ラインLの垂直方向の位置として設定してもよいが、例えば、左側の先端、右側の先端、中央等が挙げられる。
【0046】
また、描画ライン情報は、後述するように、映像データに基づいて変更される。また、描画タイミング情報も、描画ライン情報の変更に伴って変更される。
映像データ演算部52は、描画タイミング生成部53から入力された描画タイミング情報に基づいて、映像データ記憶部51から描画する画素に対応する映像データを読み出し、各種の補正演算等を行った後、各色の輝度データを光源変調部54に送出する。
【0047】
光源変調部54は、映像データ演算部52から入力された各色の輝度データに基づいて、各駆動回路310r、310g、310bを介して各光源320r、320g、320bの変調を行う。すなわち、各光源320r、320g、320bのオン/オフや、出力の調整(増減)等を行う。これにより、光源ユニット3は、映像データ(画像情報)の画素毎に対応した光を所定のタイミングおよび強度で順次出射する。
【0048】
光スキャナー41側の角度検出手段43は、その可動板411aの角度および振れ角を検出し、その角度および振れ角の情報(可動板411aの角度情報)を作動制御装置5の描画タイミング生成部53および振れ角演算部55に送出する。また、光スキャナー42側の角度検出手段44は、その可動板421aの角度を検出し、その角度の情報(可動板421aの角度情報)を作動制御装置5の角度指示部56に送出する。
【0049】
描画タイミング生成部53は、現在の描画ラインLの描画が終了し、角度検出手段43から可動板411aの振れ角の情報が入力されると、それに同期して、角度指示部56に、次に描画を行う描画ラインLの描画開始点にレーザー光LLが照射されるときの可動板421aの目標角度を示す目標角度情報(角度指示)を送出する。その可動板421aの目標角度は、描画ラインLのピッチが一定になるように設定される。角度指示部56は、角度検出手段44で検出された可動板421aの角度と、前記可動板421aの目標角度とを比較して、その差が0になるような補正を行い、光スキャナー42の駆動手段427に駆動データを送出する。
【0050】
駆動手段427は、前記駆動データに基づいて、光スキャナー42を駆動する(コイルに電圧を印加する)。これにより、描画開始点にレーザー光LLが照射されたとき、可動板421aの角度は、前記目標角度になる。
なお、本実施形態では、各描画ラインLにおいて、描画開始点から描画終了点まで、可動板421aの角速度を一定とし、レーザー光LLの垂直方向の走査速度を一定とするが、可動板421aの角速度を徐々に変化させ、レーザー光LLの垂直方向の走査速度を徐々に変化さてもよい。
【0051】
また、描画タイミング生成部53は、振れ角演算部55に、描画ライン情報、すなわち、次に描画を行う描画ラインLの垂直方向の位置の情報、および、描画ラインLの長さ情報を送出する。
振れ角演算部55では、描画タイミング生成部53から入力された次に描画を行う描画ラインLの垂直方向の位置の情報、および、その描画ラインLの長さ情報に基づいて、次に描画を行う描画ラインLにおける可動板411aの目標振れ角(振れ角の目標値)を求める。
【0052】
そして、角度検出手段43から入力された可動板411aの振れ角の情報と、前記可動板411aの目標振れ角とに基づいて、可動板411aの振れ角が目標振れ角となるように、光スキャナー41の駆動手段417に駆動データを送出する。
駆動手段417は、前記駆動データに基づいて、コイル415に、光スキャナー41の共振周波数と同じ周波数の実効電圧を印加して電流を流し、所定の磁界を発生させ、実効電流の大きさや光スキャナー41と駆動波形との位相差を変化させる事で、光スキャナー41にエネルギーを供給したり、逆に、光スキャナー41からエネルギーを奪ったりする。これにより、共振運動している可動板411aの振れ角は、前記目標振れ角になる。このようにして、角度検出手段43により検出された可動板411aの振れ角の情報(検出結果)と、前記目標振れ角(目標値)とに基づいて、可動板411aの振れ角が目標振れ角になるようにその可動板411aの振れ角を調整しつつ、描画領域911の各描画ラインL上に、順次、レーザー光LLを走査し、画像を描画してゆく。
【0053】
このように作動制御装置5は、駆動手段417の電圧印加手段416が発生する電流または電圧の大きさを調整することにより、水平方向に走査する光反射部411eの振れ角を変更する。これにより、簡単かつ確実に、光反射部411eの振れ角を変更することができる。なお、作動制御装置5は、駆動手段417の電圧印加手段416が発生する電流または電圧の大きさおよび周波数を調整することにより、水平方向に走査する光反射部411eの振れ角を変更することもできる。
また、作動制御装置5は、情報供給部7からの情報に基づいて、プロジェクター2の作動を制御する。例えば、情報供給部7からの情報に基づき、プロジェクター2が表示する映像を変更したり、光反射部411eの振れ角(回動の振幅)を変更したりすることができる。
【0054】
(情報供給部)
情報供給部7は、図3に示すように、外部センサー71と、ナビゲーション装置72とを有する。
外部センサー71は、例えば、CCDイメージセンサー、CMOSイメージセンサー等のイメージセンサーである。また、赤外センサー、超音波センサー等、光学的な方法でなく物体の有無を検知できるセンサーであっても良い。このような外部センサー71は移動体Mに取り付けられ、例えば、移動体Mの周囲の状況として、移動体Mの移動方向前方側の標識(道路交通標識)や、人、自転車、他の自動車等の移動体の存在の有無を検知する機能を有する。また、外部センサー71は、検知した移動体の位置、進行方向、進行速度や、検知した標識の内容を判別する機能を有していても良い。ここで、外部センサー71は、移動体Mの周囲の状況を検知する状況検知センサー(状況検知部)を構成する。
ナビゲーション装置72は、GPSを利用して目的地までの経路を操縦者に案内する機能を有する。
【0055】
以上のように構成された表示装置1は、前述したように、作動制御装置5が光反射部411eの回動の振幅を変更する。これにより、図8(a)に示すように、表示面91の第1の領域912aに光を走査する第1の状態(以下、単に「第1の状態」という)と、図8(b)に示すように、表示面91の第1の領域912aと第1の領域912aと異なって隣接する第2の領域912b、912cとに光を走査する第2の状態(以下、単に「第2の状態」という)とを切り換える。
これにより、必要時のみ、描画可能領域912を大きくし、それ以外のときには、描画可能領域912が必要最低限となるように光反射部411eの回動の振幅を抑えることができる。そのため、光反射部911eの回動の振幅が一定である場合に比し、消費電力を抑えることができる。
【0056】
具体的に説明すると、図8(a)、(b)に示すように、表示面91上でのレーザー光LLの軌跡である複数の描画ライン(走査ライン)Lは、ジグザグ状に配置される。
ここで、光走査部4は、垂直方向に1回走査する間に、水平方向に複数回走査することにより、1つのフレームの画像を表示面91に形成し、これを繰り返すことにより複数のフレームの画像を表示面91に順次形成する。
【0057】
複数の描画ラインLの長さは、各フレーム内において、互いに等しくなっている。すなわち、各フレーム内において、光源ユニット3からレーザー光LLを出射した光出射状態(以下、単に「光出射状態」とも言う)で表示面91上でのレーザー光LLの水平方向の振れ幅(以下、単に「レーザー光(光)LLの振れ幅」とも言う)が一定となっている。
【0058】
このような描画ラインLの長さは、可動板411aの回動中心軸J1を中心とする振れ角(以下、単に「可動板411aの振れ角」とも言う)を変更することにより、変更することができる。
そこで、作動制御装置5は、可動板411aの振れ角、すなわち可動板411aの光反射部411eの振れ角(回動の振幅)を変更することにより、描画可能領域912の水平方向での長さを変更する。
【0059】
具体的には、作動制御装置5は、第1の状態では、光反射部411eの振れ角θ1を角度θ11とし、第2の状態では、光反射部411eの振れ角θ1を角度θ11よりも大きい角度θ12とする。
第1の状態においては、例えば、図8(a)に示すように、描画ラインLの長さが比較的短く設定される。これにより、表示面91上に形成される描画可能領域912の面積は比較的小さいものとなる。ここで、第1の状態での描画可能領域912は、第1の領域912aで構成される。また、描画ラインLの長さ、すなわち、水平方向での光LLの振れ幅A1は、第1の領域912aの水平方向での長さB1よりも若干長いもの(B1+α)となる。
【0060】
水平走査は前述したように各フレーム内において複数回行われるが、このような第1の状態における水平走査では、図10に示すように、可動板411aの振れ角θ1は一定(角度θ11)となっている。なお、ここで、「可動板411aの振れ角θ1」とは、図5にて時計回り(一方の方向)へ最大角度(θ1/2)まで回動したときの可動板411aと、可動板411aが図5にて反時計回り(他方の方向)へ最大角度(θ1/2)まで回動したときの可動板411aとのなす角度(最大振れ角)を言う(図11において同じ)。
【0061】
なお、各フレームの表示期間における可動板411aの振れ角θ1は、本実施形態では一定であるが、台形補正を要する場合等には漸減または漸増させるように変化させてもよい。
また、垂直走査は前述したように各フレーム内において1回行われるが、第1の状態および第2の状態において、可動板421aの振れ角θ2(最大振れ角)は一定(角度θ21)である。より具体的には、図9に示すように、可動板421aの角度θ2は、1フレーム内において、画像の表示を行う表示期間では最小振れ角から徐々に増大し、最大振れ角に到達した後、急激に減少する。そして、以降の各フレームにおいては、同様に、前記動作を繰り返す。なお、図9では、各フレーム内における可動板421aが一方の方向へ最大角度(最小振れ角)まで回動したと他方の方向へ最大角度(最大振れ角)まで回動したときとの間の可動板421aの回動角の変遷を示している。また、可動板421aの振れ角θ2が、前述したように急激に減少する期間を「垂直帰線期間」と言う。この垂直帰線期間は、隣接する2つのフレーム間近傍に設定される。
【0062】
一方、第2の状態においては、例えば、図8(b)に示すように、描画ラインLの長さが第1の状態における描画ラインLの長さよりも長く設定される。これにより、表示面91上に形成される描画可能領域912の面積は第1の状態における描画可能領域912の面積よりも大きいものとなる。ここで、第2の状態での描画可能領域912は、第1の領域912aと、第1の領域912aに対して水平方向での一方側(図8(b)中の左側)に隣接する第2の領域912bと、第1の領域912aに対して水平方向での他方側(図8(b)中の右側)に隣接する第2の領域912cとで構成される。また、描画ラインLの長さ、すなわち、水平方向での光LLの振れ幅A1は、第1の領域912aの水平方向での長さB1と、第2の領域912bの水平方向での長さB2と、第2の領域912cの水平方向での長さB3との合計よりも若干長いもの(B1+B2+B3+α)となる。
【0063】
以上のようにして、第1の領域912aのみで描画可能領域912が構成される第1の状態と、第1の領域912aおよび第2の領域912b、912cで描画可能領域912が構成される第2の状態とを切り換えることができる。
第1の状態では、図7(a)に示すように、第1の領域912aに画像g1が表示される。
【0064】
第2の状態では、図7(b)に示すように、第1の領域912aに画像g1が表示されるとともに、第2の領域912bに画像g2、第2の領域912cに画像g3が表示される。なお、第2の状態において、画像g2および画像g3のうちの少なくとも一方の画像を必要に応じて表示すればよく、第2の領域912bおよび第2の領域912cのうちのうちのいずれか一方の領域に画像が表示されていなくてもよい。
【0065】
また、第1の状態で第1の領域912aに表示される画像g1と、第2の状態で第1の領域912aに表示される画像g1とは、互いに同じ種類であり、第1の領域912aに表示される画像g1と、第2の領域912b、912bに表示される画像とは、互いに異なる種類である。ここで、表示される画像が同じ種類とは、それぞれ同一の指標であることや、それぞれ同一の概念で束ねることができる情報であることを含む。例えば、ともに速度を表す場合であれば同じ種類とみなし、表示される数値が異なっていても同じ種類とすることができる。速度以外に、エンジン回転数、燃料残量、等についても同様である。また、各種計器類の情報(水温、油温、等の警告灯など)は、表示内容が異なっていても各種計器類の情報という概念に含まれていれば同じ種類とみなすことができる。これにより、第1の状態において表示されていなかった画像g2、g3が、第2の状態において画像g1と異なる領域に異なる画像として表示される。従って、第2の状態において、画像g2、g3を画像g1よりも目に付きやすくすることができる。
【0066】
また、画像g1は、移動体Mの移動状態に関する情報を示す画像を含み、第2の領域912b、画像g2、g3は、移動体Mの周囲の外部の状況に関する情報を示す画像を含む。これにより、第1の状態および第2の状態において、移動体Mの移動状態に関する情報を提供可能としつつ、第2の状態において、移動体Mの周囲の外部の状況に関する情報を報知することができる。
【0067】
本実施形態では、画像g1に含まれる画像として、図7に示すように、移動体Mの速度に関する情報を示す画像を用いている。なお、画像g1としては、移動体Mの移動状態に関する情報を示す画像を含むものであれば、これに限定されず、その他、例えば、エンジン回転数、燃料残量、水温、油温等の各種計器類の情報を示す画像を用いることができる。
また、画像g2に含まれる画像としてナビゲーション情報を示す画像、画像g3に含まれる画像として注意情報を示す画像を用いている。なお、画像g2、g3としては、移動体Mの周囲の外部の状況に関する情報を示す画像を含むものであれば、これに限定されない。
【0068】
また、前述したような第1の状態と第2の状態との切り換えは、前述した情報供給部7(具体的には外部センサー71やナビゲーション装置72)からの情報に応じて行われる。すなわち、作動制御装置5は、外部センサー71の検知結果やナビゲーション装置72からの案内情報に基づいて、第1の状態と第2の状態とを切り換える。このように、外部センサー71の検知結果に基づいて第1の状態と第2の状態とを切り換えることにより、移動体Mの周囲の状況を検知し得るとともに、その検知結果を報知することができる。
【0069】
例えば、通常、第1の状態にしておき、移動体Mの前方に人が飛び出してきたときに、その人を外部センサー71が検知し、その検知結果に基づいて、第1の状態から第2の状態へ切り換える。そして、第2の領域912cに、人が飛び出してきた旨の表示、例えば、ピクトグラム、文字、外部センサー71で撮像した画像等を表示する。
また、ナビゲーション装置72からの案内が必要となったときに、第1の状態から第2の状態へ切り換え、第2の領域912bに、ナビゲーション装置72からの案内情報に関する画像を表示する。
【0070】
特に、作動制御装置5は、表示面91に表示される画像の解像度および画素毎の輝度のうちの少なくとも一方を調整する調整手段(発光制御部)を構成する。具体的には、調整手段は、光出射部3から出射される光の出射タイミングおよび光出射部3から出射される光量を調整する機能を有する。そして、調整手段の調整により、第1の領域912aに第1の状態と第2の状態とで視認性の等しい画像g1(互いに大きさ、明るさ、解像度(解像感)の等しい画像)を表示することができる。そのため、描画可能領域912の面積が変化しても、第1の領域912aに表示される画像g1の見た目の変化を小さくすることができ、視認者にとって違和感が少なく見やすい画像を表示することができる。
【0071】
本実施形態では、第1の領域912aに第1の状態と第2の状態とで同じ画像g1を表示するときに、作動制御装置5は、光出射部3から出射する光量を調整することにより、第1の状態で光出射部3から第1の領域912aに出射される単位面積当たりの光量と、第2の状態で光出射部3から第1の領域912aに出射される単位面積当たりの光量とを等しくする。すなわち、作動制御装置5は、第1の状態での画像g1と第2の状態での画像g1との互いに対応する画素毎の輝度を等しくする。これにより、第1の状態および第2の状態で同じ画像g1を表示したときに、その画像g1の明るさが第1の状態と第2の状態との切り換え時に変化するのを防止することができる。そのため、第1の状態および第2の状態の双方の状態でほぼ同じ見え方の画像g1を表示できる、視認者にとって見やすい表示を行うことができる。
【0072】
また、作動制御装置5は、第1の状態で第1の領域912aに表示される画像g1の解像度と、第2の状態で第1の領域912aに表示される画像g1の解像度とを等しくする。本実施形態では、第1の状態で第1の領域912aに表示される画像g1の解像度、および、第2の状態で第1の領域912aに表示される画像g1の解像度は、それぞれ、X[dpi]である。これにより、第1の状態と第2の状態との切り換え時に第1の領域に表示される画像g1の解像度が変化することを低減することができる。結果的に、視認者が画像の解像感の変化を感じにくく、視認者にとって見た目の違和感を低減して見やすい表示を行うことができる。また、比較的簡単に、画像g1の明るさが第1の状態と第2の状態との切り換え時に変化するのを防止することができる。
また、第2の状態において、画像g1の解像度と、画像g2、g3の解像度とを互いに等しくする。これにより、第2の状態における画像g1、g2、g3の解像感の違いを視認者が感じにくくなり、視認者にとって見やすい表示を行うことができる。
【0073】
以上説明したような第1実施形態に係る表示装置1によれば、移動体Mの外部の情報等を表示する必要がある時のみ、描画可能領域912を大きくし、それ以外のときには、描画可能領域912が必要最低限となるように光反射部411eの回動の振幅を抑えることができる。そのため、光反射部911eの回動の振幅が一定である場合に比し、消費電力を抑えることができる。
また、描画可能領域912の水平方向での長さを変更しても、その変化の前後(すなわち第1の状態と第2の状態)で同じ画像を同じ明るさで表示することができる。そのため、視認者にとって違和感の少ない見やすい表示を行うことができる。
【0074】
<第2実施形態>
次に、本発明の表示装置の第2実施形態について説明する。
図12は、本発明の第2実施形態に係る表示装置の動作を説明するための図(描画可能領域、描画領域および画像を説明する図)、図13は、図12に示す描画可能領域を説明する図である。
【0075】
以下、第2実施形態の表示装置について、前述した第1実施形態との相違点を中心に説明し、同様の事項については、その説明を省略する。
第2実施形態の表示装置は、描画可能領域の水平方向での長さを変更せずに描画可能領域の垂直方向での長さを変更する以外は、第1実施形態とほぼ同様である。なお、図12、13にて、前述した実施形態と同様の構成には、同一符号を付してある。
【0076】
本実施形態では、垂直走査用の光スキャナー42の光反射部421eの回動の振幅(振れ角)を変更することにより、描画が可能な領域である描画可能領域912の垂直方向での長さを変更する。
すなわち、光反射部421eの回動の振幅を変更することにより、図13(a)に示すように、表示面91の第1の領域912aに光を走査する第1の状態と、図13(b)に示すように、表示面91の第1の領域912aと第1の領域912aに隣接する第2の領域912d、912eとに光を走査する第2の状態とを切り換える。
【0077】
これにより、移動体Mの外部の情報等を表示する必要がある時のみ、描画可能領域912を大きくし、それ以外のときには、描画可能領域912が必要最低限となるように光反射部421eの回動の振幅を抑えることができる。そのため、光反射部421eの回動の振幅が一定である場合に比し、消費電力を抑えることができる。
ここで、第1の状態では、垂直方向での光LLの振れ幅C1は、第1の領域912aの垂直方向での長さD1とほぼ等しいものとなる。
【0078】
また、第2の状態での描画可能領域912は、第1の領域912aと、第1の領域912aに対して垂直方向での一方側(図13(b)中の上側)に隣接する第2の領域912dと、第1の領域912aに対して垂直方向での他方側(図13(b)中の下側)に隣接する第2の領域912eとで構成される。また、垂直方向での光LLの振れ幅C2は、第1の領域912aの垂直方向での長さD1と、第2の領域912dの垂直方向での長さD2と、第2の領域912eの垂直方向での長さD3との合計にほぼ等しいものとなる。
【0079】
第1の状態では、図12(a)に示すように、第1の領域912aに画像g1が表示される。
第2の状態では、図12(b)に示すように、第1の領域912aに画像g1が表示されるとともに、第2の領域912dに画像g2が表示される。本実施形態では、第2の状態においても、第2の領域912eには画像を表示しない。なお、第2の状態において第2の領域912eに画像を表示してもよい。また、第2の状態において、第2の領域912dには、画像g2および画像g3(図7(b)参照)を選択的に表示してもよい。
【0080】
このように、画像g2を画像g1の上側に表示することにより、第2の状態において、画像g2を画像g1よりも目立たせることができる。
また、第1の状態で第1の領域912aに表示される画像g1の解像度と、第2の状態で第1の領域912aに表示される画像g1の解像度とを等しくする。これにより、第1の状態と第2の状態との切り換え時に第1の領域に表示される画像g1の解像度が変化することを低減することができる。結果的に、視認者が画像の解像感の変化を感じにくく、視認者にとって見た目の違和感を低減して見やすい表示を行うことができる。また、比較的簡単に、画像g1の明るさが第1の状態と第2の状態との切り換え時に変化するのを防止することができる。このとき、本実施形態では、水平走査および垂直走査の周波数が変化しないので、例えば、第2の状態における第1の領域912aを走査するときの光出射部3から出射される光強度を、第1の状態における第1の領域912aを走査するときの光出射部3から出射される光強度よりも強くする。なお、第2の状態における第1の領域912aを走査するときの光出射部3から出射される光強度と、第1の状態における第1の領域912aを走査するときの光出射部3から出射される光強度とを等しくした場合、第2の状態での垂直走査の周波数を第1の状態での垂直走査の周波数よりも高くすればよい。
以上説明したような第2実施形態に係る表示装置によっても、前述した第1実施形態と同様の効果を発揮することができる。
【0081】
<第3実施形態>
次に、本発明の表示装置の第3実施形態について説明する。
図14は、本発明の第3実施形態に係る表示装置に備えられたプロジェクターの光スキャナーを示す模式的平面図、図15は、図14中のB−B線断面図である。なお、以下では、説明の便宜上、図14中の紙面手前側を「上」、紙面奥側を「下」、右側を「右」、左側を「左」と言い、図15中の上側を「上」、下側を「下」、右側を「右」、左側を「左」と言う。
【0082】
以下、第3実施形態の表示装置について、前述した第1実施形態との相違点を中心に説明し、同様の事項については、その説明を省略する。
第3実施形態の表示装置は、プロジェクターが備える光スキャナーの構成が異なる以外は、第1実施形態とほぼ同様である。
本実施形態に係る光走査部は、いわゆる2自由度振動系(2次元走査)の1つの光スキャナー45を有している。
【0083】
光スキャナー45は、図14に示すような第1の振動系46aと第2の振動系46bと支持部46cとを備える基体46と、基体46と対向配置された対向基板47と、基体46と対向基板47との間に設けられたスペーサー部材48と、永久磁石491と、コイル492とを備えている。
第1の振動系46aは、枠状の支持部46cの内側に設けられた枠状の駆動部461aと、駆動部461aを支持部46cに両持ち支持する1対の第1の連結部462a、463aとで構成されている。
【0084】
第2の振動系46bは、駆動部461aの内側に設けられた可動板461bと、可動板461bを駆動部461aに両持ち支持する1対の第2の連結部462b、463bとで構成されている。
駆動部461aは、図14の平面視にて、円環状をなしている。なお、駆動部461aの形状は、枠状をなしていれば特に限定されず、例えば、図14の平面視にて、四角環状をなしていてもよい。このような駆動部461aの下面には、永久磁石491が接合されている。
【0085】
第1の連結部462a、463aは、それぞれ、長手形状をなしており、弾性変形可能である。第1の連結部462a、463aは、それぞれ、駆動部461aを支持部46cに対して回動可能とするように、駆動部461aと支持部46cとを連結している。このような、第1の連結部462a、463aは、互いに同軸的に設けられており、この軸(以下、「回動中心軸J3」という)を中心として、駆動部461aが支持部46cに対して回動するように構成されている。
【0086】
第1の連結部462aには、駆動部461aの角度(回動中心軸J3まわりの回動角)(挙動)を検出するための圧電素子465aが設けられている。
可動板461bは、図14の平面視にて、円形状をなしている。なお、可動板461bの形状は、駆動部461aの内側に形成することができれば特に限定されず、例えば、図14の平面視にて、楕円形状をなしていてもよいし、四角形状をなしていてもよい。このような可動板461bの上面には、光反射性を有する光反射部464bが形成されている。
【0087】
第2の連結部462b、463bは、それぞれ、長手形状をなしており、弾性変形可能である。第2の連結部462b、463bは、それぞれ、可動板461bを駆動部461aに対して回動可能とするように、可動板461bと駆動部461aとを連結している。このような第2の連結部462b、463bは、互いに同軸的に設けられており、この軸(以下、「回動中心軸J4」という)を中心として、可動板461bが駆動部461aに対して回動するように構成されている。
第2の連結部462bには、可動板461bの角度(回動中心軸J4まわりの回動角)(挙動)を検出するための圧電素子465bが設けられている。
【0088】
図14に示すように、回動中心軸J3と回動中心軸J4とは、互いに直交している。また、駆動部461aおよび可動板461bの中心は、それぞれ、図14の平面視にて、回動中心軸J3と回動中心軸J4との交点上に位置している。なお、以下、説明の便宜上、回動中心軸J3と回動中心軸J4との交点を「交点G」ともいう。
図15に示すように、以上のような基体46は、スペーサー部材48を介して対向基板47と接合している。対向基板47の上面には、永久磁石491に作用する磁界を発生させるコイル492が設けられている。
【0089】
永久磁石491は、図14の平面視にて、交点Gを通り、回動中心軸J3および回動中心軸J4のそれぞれの軸に対して傾斜した線分(この線分を「線分k」とも言う)に沿って設けられている。このような永久磁石491は、交点Gに対して長手方向の一方側がS極、他方側がN極となっている。図15では、永久磁石491の長手方向の左側がS極、右側がN極となっている。
【0090】
図14の平面視にて、線分kの回動中心軸J3に対する傾斜角θは、30〜60度であるのが好ましく、40〜50度であるのがより好ましく、ほぼ45度であるのがさらに好ましい。このように永久磁石491を設けることで、円滑に、可動板461bを回動中心軸J3および回動中心軸J4のそれぞれの軸まわりに回動させることができる。本実施形態では、線分kは、回動中心軸J3および回動中心軸J4のそれぞれの軸に対して約45度傾斜している。
【0091】
また、図15に示すように、永久磁石491の上面には、凹部491aが形成されている。この凹部491aは、永久磁石491と可動板461bとの接触を防止するための逃げ部である。このような凹部491aを形成することにより、可動板461bが回動中心軸J3まわりに回動する際、永久磁石491と接触してしまうことを防止することができる。
【0092】
コイル492は、図14の平面視にて、駆動部461aの外周を囲むように形成されている。これにより、光スキャナー45の駆動の際、駆動部461aとコイル492との接触を確実に防止することができる。その結果、コイル492と永久磁石491との離間距離を比較的短くすることができ、コイル492から発生する磁界を効率的に永久磁石491に作用させることができる。
【0093】
コイル492は、電圧印加手段493と電気的に接続されていて、電圧印加手段493によりコイル492に電圧が印加されると、コイル492から回動中心軸J3および回動中心軸J4のそれぞれの軸に直交する軸方向の磁界が発生する。
電圧印加手段493は、可動板461bを回動中心軸J3まわりに回動させるための第1の電圧と、可動板461bを回動中心軸J4まわりに回動させるための第2の電圧とをそれぞれ発生させ、その第1の電圧と第2の電圧とを重畳し、その重畳した電圧をコイル492に印加する。
【0094】
すると、第1の電圧に基づいて、永久磁石491のS極側をコイル492に引き付けようとするとともに、N極側をコイル492から離間させようとする磁界と、永久磁石491のS極側をコイル492から離間させようとするとともに、N極側をコイル492に引き付けようとする磁界とが交互に切り換わる。これにより、第1の連結部462a、463aを捩れ変形させつつ、駆動部461aが可動板461bとともに、第1の電圧の周波数で回動中心軸J3まわりに回動する。
【0095】
一方、第2の電圧に基づいて、永久磁石491のS極側をコイル492に引き付けようとするとともに、N極側をコイル492から離間させようとする磁界と、永久磁石491のS極側をコイル492から離間させようとするとともに、N極側をコイル492に引き付けようとする磁界とが交互に切り換わる。これにより、第2の連結部462b、463bを捩れ変形させつつ、可動板461bが第2の電圧の周波数で回動中心軸J4まわりに回動する。
【0096】
以上のような光スキャナー45によれば、1つのアクチュエーターで2次元的にレーザー光(光)を走査でき、光走査部4の省スペース化を図ることができる。また、例えば、第1実施形態のように1対の光スキャナーを用いる場合には、これら光スキャナーの相対的位置関係を高精度に設定しなければならないが、本実施形態ではその必要がないため、製造の容易化を図ることができる。
このような第3実施形態によっても、第1実施形態と同様の効果を発揮することができる。
【0097】
以上、本発明の表示装置を、図示の実施形態に基づいて説明したが、本発明はこれに限定されるものではなく、各部の構成は、同様の機能を有する任意の構成のものに置換することができる。また、本発明に、他の任意の構成物が付加されていてもよい。また、本発明は、前記各実施形態のうちの、任意の2以上の構成(特徴)を組み合わせたものであってもよい。
【0098】
また、前述した実施形態では、描画可能領域912の左上から右下まで描画することを繰り返して複数のフレームの画像を表示する場合を説明したが、描画可能領域912の左上から右下まで描画するフレームと、描画可能領域912の右下から左上まで描画するフレームとを交互に繰り返して、複数のフレームの画像を表示してもよい。この場合、偶数番目のフレームと奇数番目のフレームとでは、映像データ記憶部51から読み出される映像データ(画素データ)の順番を逆にすればよい。
【0099】
また、本実施形態では、各フレームについて描画を開始する位置が左上である場合を説明したが、これに限らず、例えば、各フレームについて描画を開始する位置は、右上、左下、右下等であってもよい。
また、必要に応じて、垂直方向および水平方向の少なくとも一方の方向における可動板の振れ角を調整するか、あるいは、光出射部の変調を調整して、いわゆる台形補正を行うことも可能である。
【0100】
また、前記第1実施形態では、光走査部として、1対の光スキャナーを用いたが、これに限定されず、例えば光スキャナーと、ガルバノミラーとを用いてもよい。この場合には、ガルバノミラーを垂直走査用とするのが好ましい。
また、前述した実施形態では、表示装置が1つのプロジェクターを備える場合を説明したが、これに限定されず、表示装置が備えるプロジェクターの数は、2つ以上であってもよい。この場合、複数のプロジェクターを同期させて作動させることができる。
【0101】
また、本実施形態では、第1の方向を「水平方向」、第2の方向を「垂直方向」としたが、本発明では、これに限らず、例えば、第1の方向を「垂直方向」、第2の方向を「水平方向」としてもよい。
また、前記実施形態では、3つのダイクロイックミラーを用いて、赤色レーザー光、緑色レーザー光、青色レーザー光を結合して1つのレーザー光(光)を出射しているが、ダイクロイックプリズム等を用いて結合しても良い。
【0102】
また、前述した実施形態では、光源ユニット3が、赤色のレーザーを出射するレーザー光源と、青色のレーザーを出射するレーザー光源と、緑色のレーザーを出射するレーザー光源とを有する構成について説明したが、これに限定されず、例えば、赤色のレーザーを出射するレーザー光源と、青色のレーザーを出射するレーザー光源と、紫外のレーザーを出射するレーザー光源とを備えていてもよい。この場合、表示面に、紫外レーザーが照射されることにより緑色の蛍光を発生する蛍光体を含んでおく。これにより、表示面にフルカラーの画像を表示することができる。
【0103】
また、前述した実施形態では、第1の領域の解像度が第1の状態と第2の状態とで等しい場合を例に説明したが、第1の領域の解像度が第1の状態と第2の状態とで異なっていてもよい。この場合、第1の状態および第2の状態のうちの少なくとも一方の状態において、第1の領域に表示される画像の画素毎の輝度を調整する(増加または減少させる)ことにより、第1の領域に第1の状態と第2の状態とで視認性の等しい画像を表示することができる。例えば、第1の状態での第1の領域の画像の解像度が第2の状態での第1の領域の画像の解像度よりも高い場合、第2の状態での第1の領域の画像の画素毎の輝度を第1の状態での第1の領域の画像の画素毎の輝度よりも強くする。
また、前述した実施形態では、移動体が車両(自動車)である場合を例に説明したが、本発明では、これに限らず、移動体は、例えば、列車、飛行体、船等であってもよい。飛行体としては、例えば、旅客機、戦闘機等の飛行機、ヘリコプター、飛行船等が挙げられる。
【符号の説明】
【0104】
1……表示装置 2……プロジェクター 3……光源ユニット 4……光走査部 5……作動制御装置 7……情報供給部 9……ウインドシールド 9A……仮想面 31b……レーザー光源 31g……レーザー光源 31r……レーザー光源 32b……コリメーターレンズ 32g……コリメーターレンズ 32r……コリメーターレンズ 33b……ダイクロイックミラー 33g……ダイクロイックミラー 33r……ダイクロイックミラー 41……光スキャナー 42……光スキャナー 43……角度検出手段 44……角度検出手段 45……光スキャナー 46……基体 46a……第1の振動系 46b……第2の振動系 46c……支持部 47……対向基板 48……スペーサー部材 51……映像データ記憶部 52……映像データ演算部 53……描画タイミング生成部 54……光源変調部 55……振れ角演算部 56……角度指示部 71……外部センサー 72……ナビゲーション装置 91……表示面 100……表示システム 310r、310g、310b……駆動回路 320b……光源 320g……光源 320r……光源 411……基体 411a……可動板 411b……支持部 411c……連結部 411d……連結部 411e……光反射部 412……スペーサー部材 413……対向基板 414……永久磁石 415……コイル 416……電圧印加手段 417……駆動手段 421a……可動板 421e……光反射部 427……駆動手段 431……圧電素子 432……起電力検出部 433……角度検知部 461a……駆動部 461b……可動板 462a、463a……第1の連結部 462b、463b……第2の連結部 464b……光反射部 465a……圧電素子 465b……圧電素子 491……永久磁石 491a……凹部 492……コイル 493……電圧印加手段 911……描画領域 912……描画可能領域 912a〜912e……領域 BB……青色レーザー光 G……交点 g、g1、g2、g3……画像 GG……緑色レーザー光 J1……回動中心軸 J2……回動中心軸 J3……回動中心軸 J4……回動中心軸 L……描画ライン LL……レーザー光 M……移動体 k……線分 RR……赤色レーザー光
【特許請求の範囲】
【請求項1】
光を出射する光出射部と、
前記光出射部から出射した光を反射させる少なくとも1つの光反射部が回動中心軸まわりに回動可能に設けられ、かつ、画像が表示される表示面上にて、前記光反射部で反射した光を第1の方向に走査するとともに前記第1の方向に直交する第2の方向に前記第1の方向に走査する速度よりも遅い速度で走査する光走査部と、
前記光反射部の回動の振幅を変更する振幅変更部と、
前記光出射部からの光の出射タイミングおよび前記光出射部から出射される光量を調整する発光制御部と、を有し、
前記振幅変更部が前記光反射部の回動の振幅を変更することにより、前記表示面の第1の領域に光を走査する第1の状態と、前記表示面の前記第1の領域と前記第1の領域と異なる第2の領域とに光を走査する第2の状態とを切り換え、
前記発光制御部が前記光出射部から出射する光量を調整することにより、前記第1の領域の単位面積当たりの光量を前記第1の状態と前記第2の状態とで等しくすることを特徴とする表示装置。
【請求項2】
前記発光制御部は、前記光出射部からの光の出射タイミングを調整することにより、前記第1の状態で前記第1の領域に表示される画像の解像度と、前記第2の状態で前記第1の領域に表示される画像の解像度とを等しくする請求項1に記載の表示装置。
【請求項3】
前記第1の状態で前記第1の領域に表示される画像と、前記第2の状態で前記第1の領域に表示される画像とは、互いに同じ種類であり、
前記第1の領域に表示される画像と、前記第2の領域に表示される画像とは、互いに異なる種類である請求項1または2に記載の表示装置。
【請求項4】
前記第1の領域に表示される画像は、前記表示装置を備える移動体の移動状態に関する情報を示す画像を含み、
前記第2の領域に表示される画像は、前記移動体の外部の状況に関する情報を示す画像を含む請求項3に記載の表示装置。
【請求項5】
前記移動体の外部の状況を検知する状況検知部を有し、
前記振幅変更部は、前記状況検知部の検知結果に基づいて、前記第1の状態と前記第2の状態とを切り換える請求項4に記載の表示装置。
【請求項6】
前記振幅変更部は、前記第1の方向に光を走査する前記光反射部の回動の振幅を変更する請求項1ないし5のいずれかに記載の表示装置。
【請求項7】
前記振幅変更部は、前記第2の方向に光を走査する前記光反射部の回動の振幅を変更する請求項1ないし6のいずれかに記載の表示装置。
【請求項8】
前記光走査部は、周期的に変化する電流または電圧の供給により前記光反射部を回動させる駆動部を備え、
前記振幅変更部は、前記駆動部に供給する前記電流または前記電圧の大きさおよび周波数を調整することにより、前記光反射部の回動の振幅を変更する請求項1ないし7のいずれかに記載の表示装置。
【請求項9】
前記光出射部は、レーザー光を出射する請求項1ないし8のいずれかに記載の表示装置。
【請求項1】
光を出射する光出射部と、
前記光出射部から出射した光を反射させる少なくとも1つの光反射部が回動中心軸まわりに回動可能に設けられ、かつ、画像が表示される表示面上にて、前記光反射部で反射した光を第1の方向に走査するとともに前記第1の方向に直交する第2の方向に前記第1の方向に走査する速度よりも遅い速度で走査する光走査部と、
前記光反射部の回動の振幅を変更する振幅変更部と、
前記光出射部からの光の出射タイミングおよび前記光出射部から出射される光量を調整する発光制御部と、を有し、
前記振幅変更部が前記光反射部の回動の振幅を変更することにより、前記表示面の第1の領域に光を走査する第1の状態と、前記表示面の前記第1の領域と前記第1の領域と異なる第2の領域とに光を走査する第2の状態とを切り換え、
前記発光制御部が前記光出射部から出射する光量を調整することにより、前記第1の領域の単位面積当たりの光量を前記第1の状態と前記第2の状態とで等しくすることを特徴とする表示装置。
【請求項2】
前記発光制御部は、前記光出射部からの光の出射タイミングを調整することにより、前記第1の状態で前記第1の領域に表示される画像の解像度と、前記第2の状態で前記第1の領域に表示される画像の解像度とを等しくする請求項1に記載の表示装置。
【請求項3】
前記第1の状態で前記第1の領域に表示される画像と、前記第2の状態で前記第1の領域に表示される画像とは、互いに同じ種類であり、
前記第1の領域に表示される画像と、前記第2の領域に表示される画像とは、互いに異なる種類である請求項1または2に記載の表示装置。
【請求項4】
前記第1の領域に表示される画像は、前記表示装置を備える移動体の移動状態に関する情報を示す画像を含み、
前記第2の領域に表示される画像は、前記移動体の外部の状況に関する情報を示す画像を含む請求項3に記載の表示装置。
【請求項5】
前記移動体の外部の状況を検知する状況検知部を有し、
前記振幅変更部は、前記状況検知部の検知結果に基づいて、前記第1の状態と前記第2の状態とを切り換える請求項4に記載の表示装置。
【請求項6】
前記振幅変更部は、前記第1の方向に光を走査する前記光反射部の回動の振幅を変更する請求項1ないし5のいずれかに記載の表示装置。
【請求項7】
前記振幅変更部は、前記第2の方向に光を走査する前記光反射部の回動の振幅を変更する請求項1ないし6のいずれかに記載の表示装置。
【請求項8】
前記光走査部は、周期的に変化する電流または電圧の供給により前記光反射部を回動させる駆動部を備え、
前記振幅変更部は、前記駆動部に供給する前記電流または前記電圧の大きさおよび周波数を調整することにより、前記光反射部の回動の振幅を変更する請求項1ないし7のいずれかに記載の表示装置。
【請求項9】
前記光出射部は、レーザー光を出射する請求項1ないし8のいずれかに記載の表示装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【公開番号】特開2012−255859(P2012−255859A)
【公開日】平成24年12月27日(2012.12.27)
【国際特許分類】
【出願番号】特願2011−128067(P2011−128067)
【出願日】平成23年6月8日(2011.6.8)
【出願人】(000002369)セイコーエプソン株式会社 (51,324)
【Fターム(参考)】
【公開日】平成24年12月27日(2012.12.27)
【国際特許分類】
【出願日】平成23年6月8日(2011.6.8)
【出願人】(000002369)セイコーエプソン株式会社 (51,324)
【Fターム(参考)】
[ Back to top ]