
表示装置
【課題】 回動軸の軸ぶれに伴う可動部材のぶれを極力抑制し、商品性を向上させることが可能な表示装置を提供する。
【解決手段】 表示領域に所定の画像を表示する表示手段としてのディスプレイ装置10と、このディスプレイ装置10の前方側に配置される可動部材30と、この可動部材30を移動させる移動機構40とを有し、移動機構40が、駆動力を発生する駆動装置412と、駆動力を可動部材30に伝達するための動力伝達機構413とを備えてなる表示装置において、動力伝達機構413は、駆動力の発生に伴い回動する駆動装置412の回動軸412aと動力伝達機構413に設けられる軸部X1とを連結する連結部材413dを備え、この連結部材413dには弾性体Y3が含まれているものである。
【解決手段】 表示領域に所定の画像を表示する表示手段としてのディスプレイ装置10と、このディスプレイ装置10の前方側に配置される可動部材30と、この可動部材30を移動させる移動機構40とを有し、移動機構40が、駆動力を発生する駆動装置412と、駆動力を可動部材30に伝達するための動力伝達機構413とを備えてなる表示装置において、動力伝達機構413は、駆動力の発生に伴い回動する駆動装置412の回動軸412aと動力伝達機構413に設けられる軸部X1とを連結する連結部材413dを備え、この連結部材413dには弾性体Y3が含まれているものである。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、表示領域に所定の画像を表示する表示手段と、この表示手段の前方側に配置される可動部材と、この可動部材を移動させる移動機構とを備えた表示装置に関するものである。
【背景技術】
【0002】
従来より、この種の表示装置にあっては、例えば下記特許文献1に記載されているものが知られている。この特許文献1に記載の表示装置は、車両に搭載される指示計器装置からなり、表示領域に所定の画像(例えば目盛等の指標画像)を表示する表示器(表示手段)と、この表示器の前方側に配置される透光性材料からなる円板状の可動部材と、前記指標画像を指示するように可動部材上に載置される指針と、可動部材を移動させる移動機構とを有し、可動部材の周縁には前記指標画像を取り囲むようにリング形状からなる環状部が載置されている。
【0003】
移動機構は、駆動力を発生するステッピングモータからなる駆動装置と、前記駆動力を可動部材に伝達するためのアーム部(動力伝達機構)とを備え、このアーム部は、その一端側が駆動装置の回動軸に固定されるとともに、その他端側が可動部材に固定されている。そして、駆動力の発生に伴い駆動装置の回動軸が回動すると、回動軸の回動に伴う動力がアーム部を介して可動部材へと伝達され、これにより可動部材が表示器上を左右に移動する構成となっている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2010−175411号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、特許文献1に記載の表示装置の場合、駆動力の発生に伴い駆動装置の回動軸が回動すると、回動軸が軸ぶれ(振動)することに起因して、回動軸の回動に伴う動力がアーム部(動力伝達機構)を介して可動部材へと伝達された際に、回動軸の軸ぶれに伴って表示器上を移動する可動部材にぶれが生じ、商品性が低下してしまうという問題がある。また、例えば特許文献1に記載の表示装置のごとき、可動部材上に指針が搭載されている構成にあっては、回動軸の軸ぶれに伴って可動部材だけではなく可動部材に載置されている指針も左右にぶれて指針の動作にも悪影響を与えることになり、更なる商品性の低下を招く虞がある。
そこで本発明は、前述の課題に対して対処するため、回動軸の軸ぶれに伴う可動部材のぶれを極力抑制し、商品性を向上させることが可能な表示装置の提供を目的とするものである。
【課題を解決するための手段】
【0006】
本発明は、表示領域に所定の画像を表示する表示手段と、前記表示手段の前方側に配置される可動部材と、前記可動部材を移動させる移動機構とを有し、前記移動機構が、駆動力を発生する駆動装置と、前記駆動力を前記可動部材に伝達するための動力伝達機構とを備えてなる表示装置において、前記動力伝達機構は、前記駆動力の発生に伴い回動する前記駆動装置の回動軸と前記動力伝達機構に設けられる軸部とを連結する連結部材を備え、前記連結部材には弾性体が含まれていることを特徴とする。
【発明の効果】
【0007】
本発明によれば、初期の目的を達成でき、回動軸の軸ぶれに伴う可動部材のぶれを極力抑制し、商品性を向上させることが可能な表示装置を提供できる。
【図面の簡単な説明】
【0008】
【図1】本発明の一実施形態に係る表示装置の外形を示す概略図であり、表示装置における第1駆動装置、第2駆動装置、第1伝達機構、第2伝達機構の各部の位置を説明するための模式図である。
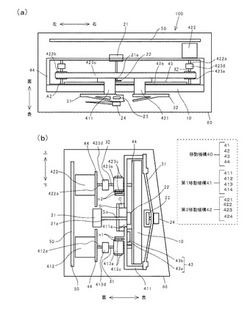
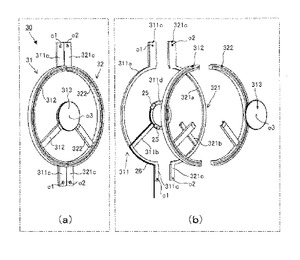
【図2】(a)は図1の表示装置を上側から見た場合の概略透過図であり、(b)は図1中、A−A線概略断面図である。
【図3】(a)は図1の表示装置を表側から見た場合の指針ユニットと装飾ユニットを示す図であり、(b)は図3(a)のB−B線概略断面図であり、(c)は図3(a)の矢視Cにおける装飾ユニットの要部側面図である。
【図4】(a)は装飾ユニットの斜視図であり、(b)は図4(a)の装飾ユニットの分解斜視図である。
【図5】(a)は第1パターンにある状態の装飾ユニットを説明するための図であり、第1及び第2検出ユニットを説明するための図である。(b)は第2パターンにある状態の装飾ユニットを説明するための図であり、第1及び第2検出ユニットを説明するための図である。
【図6】(a)は第1移動機構の可動範囲を説明するための図であり、(b)は第2移動機構の可動範囲を説明するための図であり、(c)は第1移動機構の可動範囲と第2移動機構の可動範囲の関係を示す図である。
【図7】本発明の一実施形態に係る第1連結部材と第1回動軸と第1軸部とを示す斜視図である。
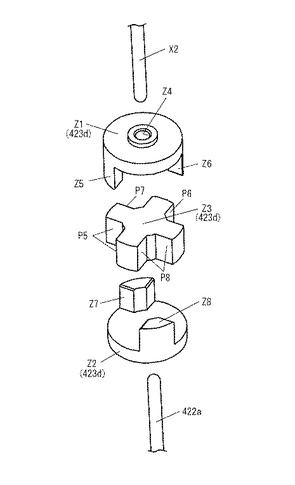
【図8】本発明の一実施形態に係る第2連結部材と第2回動軸と第2軸部とを示す斜視図である。
【図9】本発明の一実施形態に係る表示装置の電気的構成を説明するためのブロック図である。
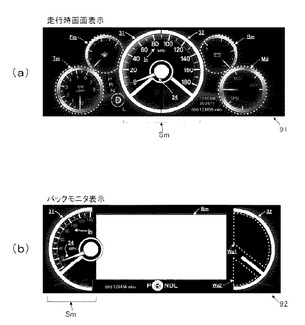
【図10】(a)は第1パターンでディスプレイ装置が表示する走行画面表示の一例を示す図であり、(b)は第2パターンでディスプレイ装置が表示するバックモニタ表示の一例を示す図である。
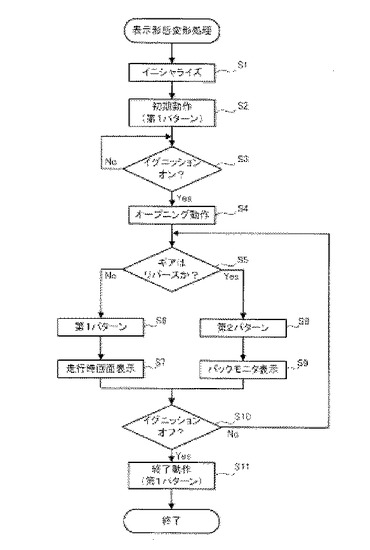
【図11】制御部が実行する表示形態変形処理のフローチャートである。
【発明を実施するための形態】
【0009】
本発明の一実施形態に係る表示装置について図面を参照して説明する。
本実施形態に係る表示装置100は、図1にその外形を示す、車両に搭載される車両用計器である。
【0010】
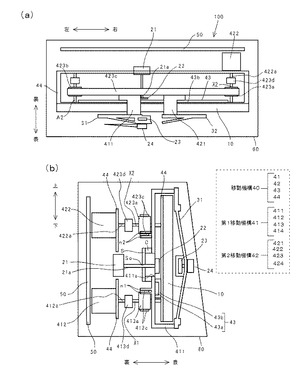
表示装置100は、図2(a)、(b)に示すように、ディスプレイ装置(表示手段)10と、指針式計器20と、装飾ユニット(可動部材)30と、移動機構40と、回路基板50と、ケース体60と、を備える。
なお、以下では、図1に両端矢印で示すように、表示装置100の表示面方向(つまり、表示装置100に対するユーザ側方向)を「表」とし、表示面方向の反対側方向を「裏」とし、表示面を視認するユーザからみた場合の上下左右方向を、それぞれ、「上」、「下」、「左」、「右」として、説明する。
【0011】
ディスプレイ装置10は、例えばTFT型の液晶ディスプレイ装置であり、後述する制御部70の制御の下、車速、エンジン回転数、エンジン温度、燃料の残量、各種警告等からなる所定の画像を表示エリア(図示せず)に表示するものである。また、ディスプレイ装置10は、左右方向にスライド移動する指針式計器20及び装飾ユニット30の位置状態(後述する「第1パターン」、「第2パターン」等)に合わせて、表示態様を変化させる(図8(a)、(b)参照)。指針式計器20及び装飾ユニット30がどのように移動するか、ディスプレイ装置10がどのように表示態様を変化させるか、については後に詳細に説明する。
ディスプレイ装置10は、TFT液晶パネル、偏光板、バックライト、ディスプレイ用筐体等(図示せず)から構成され、例えば、ケース体60に形成された取付部材(図示せず)に取り付けられ、所定位置に配置され、支持される。
【0012】
指針式計器20は、主に図2(b)、図3(b)に示すように、指針駆動部21と、第1マグネット体22と、第2マグネット体23と、指針ユニット24と、光源25と、導通部材26とを備える。なお、後述するように、指針式計器20を構成する各部は、第1移動板411に取り付けられる装飾ユニット30の第1部分31を介して取り付けられているため、第1移動板411の移動に伴い移動する。
【0013】
指針駆動部21は、例えばステッピングモータから構成され、後述する制御部70の制御の下、計測量(例えば車速)に応じて回転軸21aを回転させる。指針駆動部21は、図2(b)に示すように、後述の第1移動板411の裏面側に取り付けられた基材Sに固定されている。回転軸21aの先端部は、基材Sに設けられた孔部So、後述する第1移動板411の開口部411aを通過し、ディスプレイ装置10のすぐ裏に位置する。
【0014】
第1マグネット体22は、回転軸21aに取り付けられ、回転軸21aの回転に伴って回転する。このように取り付けられた第1マグネット体22は、図2(b)に示すように、ディスプレイ装置10のすぐ裏に位置する。第1マグネット体22は、図3(b)に示すように、回転軸21a側のヨーク部22aと磁石部22bとから構成され、磁力を効率良く第2のマグネット23体に伝えるとともにヨーク部22aの透磁効果により、指針駆動部21に対しては、磁気影響を与え難くしている。
【0015】
第2マグネット体23は、後述の台座313に回転可能に支持されており、ディスプレイ装置10の表側であって、第1マグネット体22と対向する位置に位置する。第2マグネット体23は、第1マグネット体22からのディスプレイ装置10を透過した磁力を受け、第1のマグネット体22の回転に従って、回転する。また、第2マグネット体23は、後述する指針ユニット24の指針軸24aを支持する。
【0016】
このような第1マグネット体22と第2マグネット体23により、指針駆動部21の回転動力は、指針ユニット24へ伝えられ、指針ユニット24は回転することができる。前述したディスプレイ装置10のディスプレイ用筐体は、このように磁力を透過させる必要があるため、アルミ等の非磁性体により形成される。
【0017】
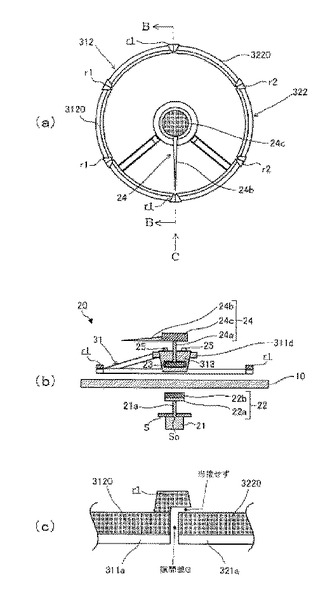
指針ユニット24は、第2マグネット体23と一体に回転する指針部材であり、図3(b)に示すように、指針軸24aと、導光指針24bと、指針キャップ24cと、を備える。
指針軸24aは、第2マグネット体23に軸支される。導光指針24bは、指針軸24aに固定され、指針軸24a側の受光部(図示せず)で光源25が出射した光を受け、発光する。導光指針24bは、無色又は有色透明の導光材料から形成される。指針キャップ24cは、導光指針24bの一部(指針軸24a近傍)を、指針軸24aの軸方向表側から覆うようにして導光指針24bに取り付けられる。指針キャップ24cは、例えば、合成樹脂により形成された黒色のキャップであり、光を透過しない。
【0018】
光源25は、指針軸24a近傍に配設される、1又は複数(例えば、2、3灯)のLEDから構成される。光源25は、図4(b)に示すように、装飾ユニット30の後述する光源取付部311dに取り付けられる。このように取り付けられた光源25は、指針ユニット24の直下(指針キャップ24cの裏側)に位置し、指針ユニット24を照光する(導光指針24bの前記受光部に向け光を出射する)。光源25は、後述する制御部70の制御の下、発光する。
【0019】
導通部材26は、図4(b)に示すように、例えば、FPC(フレキシブル配線板)からなり、光源25と後述の制御部70(マイコン71)とを接続し、制御部70から送信された制御信号を光源25に伝送する。導通部材26は、図示するように、後述の第1基材311に取り付けられる。
【0020】
可動部材である装飾ユニット30は、図4(a)に示すように、移動機構40によりそれぞれ独立して左右方向にスライド移動する第1部分31と第2部分32とから構成され、ディスプレイ装置10の前方側に配置される。
【0021】
第1部分31は、指針式計器20と共にスライド移動する部分であり、図4(b)に示すように、第1基材311と、第1装飾カバー312と、台座313と、を備える。
第2部分32は、第1部分31の右側に位置し、図4(b)に示すように、第2基材321と、第2装飾カバー322とを備える。
【0022】
第1基材311と第2基材321とは、例えば、アルミ、ステンレスの金属材料から構成され、プレス、切削等の加工により形成される。
第1基材311は、円弧部311aと、アーム部311bと、取付部311cと、光源取付部311dと、を備える。
第2基材321は、円弧部321aと、アーム部321bと、取付部321cと、を備える。
【0023】
円弧部311a,321aは、第1基材311と第2基材321とが近接した場合(図5(a)等参照)に、1つの円形状(リング形状)になるように形成されている。つまり、その円形状の、円中心を通る上下方向の線を基準として(以下、この仮想線を基準線という)、左半分の円弧形状に第1基材311の円弧部311aは形成され、右半分の円弧形状に第2基材321の円弧部321aは形成されている。
【0024】
第1基材311のアーム部311bは、円弧部311aの一部から、円弧中心に向かって延びるように形成された部材である。同様に、第2基材321のアーム部321bは、半円弧状の円弧部321aの一部から、円弧中心に向かって延びるように形成された部材である。
アーム部311bとアーム321bとは、前記基準線に対して、線対称になるように形成される。特に、第1基材311のアーム部311bは、導通部材26を光源25に案内する役割を持つ。具体的には、一端が制御部70に接続される導通部材26は、図4(b)に示すように、円弧部311aの一部に沿って取り付けられ、さらに、このアーム部311bに沿って取り付けられることで、他端が光源25に至るように配設されている。一方、第2基材321のアーム部321bは、デザイン上の要請によりこのように形成される。よって、アーム部321bを省いてもよい。
【0025】
第1基材311の取付部311cは、円弧部311aの両端から円の外周方向(上下方向)に延びるように形成された部材であり、取付孔o1を有する。同様に、第2基材321の取付部321cは、円弧部321aの両端から円の外周方向(上下方向)に延びるように形成された部材であり、取付孔o2を有する。
第1基材311の取付部311cを後述する第1移動板411に取り付け、固定することで、装飾ユニット30の第1部分31は、第1移動板411がスライド移動するに伴ってスライド移動する。具体的には、第1部分31は、取付孔o1に通したネジ等(図示せず)により第1移動板411に固定される。同様に、第2基材321の取付部321cを後述する第2移動板421に取り付け、固定することで、装飾ユニット30の第2部分32は、第2移動板421がスライド移動するに伴ってスライド移動する。具体的には、第2部分32は、取付孔o2に通したネジ等(図示せず)により第2移動板421に固定される。第1移動板411,第2移動板421がそれぞれどのようにスライド移動するかについては、後に詳述する。
【0026】
光源取付部311dは、アーム部311bの端部に取り付けられた円形状(リング形状)の部材である。光源取付部311dには、その円形状の円周に沿うように前述の光源25が取り付けられる。光源取付部311dの円中心と、円弧部311a,321aが互いに近接したときに表現される円の中心とは略一致(丁度一致も含む)する。
本実施形態において、第1基材311と第2基材321とは、第1基材311が有する光源取付部311dを除けば、前記基準線に対して、線対称に形成されている。
【0027】
第1装飾カバー312と第2装飾カバー322とは、それぞれ、金属、合成樹脂等により形成される不透過の部材である。図3(a)に示すように、第1装飾カバー312は本体部3120と複数のリブr1とから構成され、第2装飾カバー322は本体部3220と複数のリブr2とから構成される。
なお、図1、図3(a)〜(c)、図10(b)以外の図面では、リブr1,r2を省略している。
【0028】
第1装飾カバー312の本体部3120は、第1基材31の円弧部311a及びアーム部311bに対応するように(表側からの投影面積が略同一形状となるように)形成され、両者を表側から覆うように第1基材311に取り付けられる部材である。
第2装飾カバー322の本体部3220は、第2基材32の円弧部321a及びアーム部321bに対応するように(表側からの投影面積が略同一形状となるように)形成され、両者を表側から覆うように第2基材321に取り付けられる部材である。
【0029】
複数のリブr1は本体部3120の表面に形成され、複数のリブr2は本体部3220の表面に形成される。例えば、複数のリブr1,r2は、図3(a)に示すように、円弧部311a,321aが互いに近接したときに表現される円の円周方向に沿って、それぞれ、等間隔に位置する。
本実施形態では、リブr1,r2の総数は6つである。しかし、リブr1,r2は、第1装飾カバー312と第2装飾カバー322とに半分ずつに割り振られていない。第1装飾カバー312は4つのリブr1を備え、第2装飾カバー322は2つのリブr2を備える。特に、第1装飾カバー312の4つのリブr1のうち、上下方向に位置する(第2装飾カバー322に最も近い位置に位置する)2つのリブr1(図で符号に下線を付した)は、第1部分31と第2部分32とが互いに近接した時には、図3(c)に示すように、その一部が第2装飾カバー322の本体部3220にラップするように(表示装置100を表側から見た(正視した)場合に、重なるように)設けられる。近接時において、前記上下方向に位置する2つのリブr1は、第2装飾カバー322の本体部3220表面とは当接しない。
このようにすることで、第1部分31と第2部分32とでリング形状を表現する場合(図5(a)参照)に、両者を当接させずとも、意図しない間欠(隙間)が生じることなくなめらかなリング形状を表現できる。また、両者を当接させずに済むため、移動の際の衝撃を抑えることができ故障防止にも繋がる。また、両者がぶつかったときの衝撃音も発生しないため騒音防止にも繋がる。
【0030】
また、第1装飾カバー312は、不透過の部材からなり、導通部材26が配設された第1基材311を表側から覆うため、導通部材26を隠すことができる。このようにして、導通部材26をユーザから見えることなく取り付けることができる。なお、本実施形態では、第1装飾カバー312を不透過の部材としたが、導通部材26が目立たない程度においては、半透過の部材であってもよい。第2装飾カバー322も半透過の部材であってもよい。
【0031】
台座313は、図4(b)に示すように、所定の樹脂により例えば円錐台状に形成され、第2マグネット体23を回転可能に保持する部材であり、第1基材31の光源取付部311dに取り付けられる。台座313の内部には空洞の収納スペースが形成され、台座313は、この収納スペースにより、第2マグネット体23を回転可能に保持し、且つ、収納する。台座313の表側の面(円錐台の底面)の中心部には、指針ユニット24の指針軸24aの軸径より一回り大きい開口径の孔部o3が形成されている。第2マグネット体23に軸支された指針軸24aは、この孔部o3を通過する。
【0032】
移動機構40は、図2(b)等に示すように、第1移動機構41と、第2移動機構42と、スライド機構43と、移動機構用筐体44と、から構成され、装飾ユニット30をスライド移動させるために用いられる。
【0033】
第1移動機構41は、装飾ユニット30の第1部分31(及び指針式計器20)を左右方向にスライド移動させるための機構である。
第2移動機構42は、装飾ユニット30の第2部分32を左右方向にスライド移動させるための機構である。
【0034】
第1移動機構41は、第1移動板411と、駆動力を発生する駆動装置である第1駆動部412と、当該駆動力を第1部分31(装飾ユニット30)に伝達するための動力伝達機構である第1伝達機構413と、第1検出ユニット414とを備える。
第2移動機構42は、第2移動板421と、駆動力を発生する駆動装置である第2駆動部422と、当該駆動力を第2部分32(装飾ユニット30)に伝達するための動力伝達機構である第2伝達機構423と、第2検出ユニット424とを備える。
【0035】
第1移動板411、第2移動板421は、例えば、樹脂材料やアルミ等の非磁性金属から形成される部材である。
第1移動板411は、指針式計器20と装飾ユニット30の第1部分31とを保持する。また、第1移動板411は、その裏面に形成された挟持部n1により、第1伝達機構413の後述するタイミングベルト413cに取り付けられる。第1移動板411には、指針駆動部21の回転軸21aを通すための開口部411aが設けられている。第1移動板411の裏面側には、開口部411aを外周から立設し、基材取付部Cが形成されている(基材取付部Cは、第1移動板411と別体でもよい)。基材取付部Cに前述の基材Sが取り付けられ、基材Sに指針駆動部21が取り付けられることで、指針駆動部21は、第1移動板411の裏側に固定される。
第2移動板421は、装飾ユニット30の第2部分32を保持する。また、第2移動板421は、その裏面に形成された挟持部n2により、第2伝達機構423の後述するタイミングベルト423cに取り付けられる。
【0036】
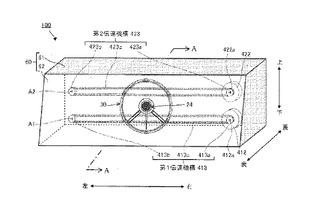
駆動装置としての第1駆動部412、第2駆動部422は、それぞれ、例えば、ステッピングモータからなる。第1駆動部412は、後述の制御部70の制御の下、回動軸である第1回動軸412aを回転させる。同様に、第2駆動部422は、後述の制御部70の制御の下、回動軸である第2回動軸422aを回転させる。第2駆動部422は、図1、図2(b)に示すように、第1駆動部412の上に位置する。
【0037】
第1伝達機構413と第2伝達機構423とは、互いに、上下方向に所定の間隔を空けて配置される。このように両者を配置することで、表示装置100が表裏方向に厚くなることを避けることができるため、表示装置100を薄くすることが可能である。第1伝達機構413は、第2伝達機構423の下側に位置する。
【0038】
動力伝達機構としての第1伝達機構413は、左右方向に所定の間隔を空けて配置された2つのプーリー413a,413bと、両者に巻回されるタイミングベルト413cと、連結部材である第1連結部材413dとを備え、タイミングベルト413cと第1連結部材413dとは後述する第1軸部によって連結される。
【0039】
プーリー413aは、図1に示すように、表示装置100の表側から見て右側に位置している。そして、この場合、プーリー413aに設けられる(プーリー413aに圧入されている)軸部である第1軸部X1と第1回動軸412aとは第1連結部材413dによって連結されている。プーリー413bは、図1に示すように、表示装置100の表側から見て左側に位置し、移動機構用筐体44に取り付けられた軸A1(図1参照)に回転可能に保持される。
【0040】
タイミングベルト413cは、2つのプーリー413a,413bが空転しないように所定の張力をもって取り付けられるため、プーリー413aが回転すると、プーリー413bも同様に回転する。このようにして、第1伝達機構413は、第1駆動部412で発生した回転動力(駆動力)をスライド方向(左右方向)の動力に変換して、前述のようにタイミングベルト413cに取り付けられた第1移動板411をスライド移動させる。
【0041】
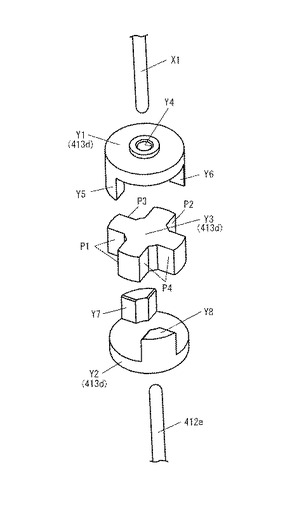
第1連結部材413dは、図7に示すように離間するように配置される一対の基部Y1、Y2と、これら基部Y1、Y2間に挟持される(介在する)弾性体Y3とを備え、駆動力の発生に伴い回動する第1駆動部412の第1回動軸412aと第1伝達機構413のプーリ−413aに設けられる第1軸部X1とを連結(結合)する結合部材からなる。これにより第1回動軸412aの回動に連動して第1軸部X1が回動することになる。
【0042】
基部Y1、Y2は、合成樹脂材料またはアルミ等の金属材料からなり、その外形形状は略同一形状となっており、一方の基部Y1の略中央部にはプーリー413aに圧入されている第1軸部X1の下端側を軸受けするための貫通孔からなる第1軸受部Y4が形成されている。換言すれば、第1軸部X1は、その上端側がプーリー413aに圧入されるとともにその下端側が第1軸受部Y4に圧入される構成となっている。
【0043】
なお、図7中、Y5、Y6は基部Y1の背後から基部Y2側に向けて突出形成された一対の第1、第2の突出部であり、これら第1、第2の突出部Y5、Y6は、相対する(向かいあう)ように図7中、基部Y1の左右に位置しており、第1の突出部Y5は弾性体Y3の後述する第1嵌合部P1に嵌合固定されるとともに第2の突出部Y6は弾性体Y3の後述する第2嵌合部P2に嵌合固定される。
【0044】
また、一方の基部Y1と対をなす他方の基部Y2の略中央部には第1駆動部412の第1回動軸412aの上端側を軸受けするための貫通孔からなる第2軸受部(図示せず)が形成されている。なお、図7中、Y7、Y8は基部Y2の表面から基部Y1側に向けて突出形成された一対の第3、第4の突出部であり、これら第3、第4の突出部Y7、Y8は、相対する(向かいあう)ように図7中、基部Y2の上下に位置しており、第3の突出部Y7は弾性体Y3の後述する第3嵌合部P3に嵌合固定されるとともに第4の突出部Y6は弾性体Y3の後述する第4嵌合部P4に嵌合固定される。
【0045】
弾性部材である弾性体Y3は、クロロプレンゴム等の合成ゴムもしくはエラストマー樹脂からなり、その角部には切り欠き形状からなる第1嵌合部P1、第2嵌合部P2、第3嵌合部P3、第4嵌合部P4が設けられている。そして、第1嵌合部P1に第1の突出部Y5が嵌合(噛合)され、第2嵌合部P2に第2の突出部Y6が嵌合(噛合)され、第3嵌合部P3に第3の突出部Y7が嵌合(噛合)され、第4嵌合部P4に第4の突出部Y8が嵌合(噛合)されることで、基部Y1と基部Y2との間に弾性体Y3が挟持される構成となる。なお、このように基部Y1と基部Y2とが噛み合うように固定されることで、第1回動軸412aの回動に連動して連結部材413dが回転する際に、基部Y1、Y2間の遊び(バックラッシュ)を低減することができる。
【0046】
ところで、第1駆動部412から発生する駆動力によって第1回動軸412aが回動した際に、第1回動軸412aが軸ぶれした場合には、この第1回動軸412aの軸ぶれに伴う振動は、第1回動軸412aの先端に装着された第1連結部材413dへと伝達される。
【0047】
この際、第1回動軸412aの軸ぶれに伴い、第1連結部材413dへと伝達される振動は、第1連結部材413dに備えられる弾性体Y3によって吸収(減衰)されるため、プ−リー413a側にて第1連結部材413dと連結される第1軸部X1の軸ぶれ(振動)が極力抑制されることになる。この結果、プ−リー413aに装着されるタイミングベルト413c及びタイミングベルト413cに取り付けられる第1移動板411に伝わる振動も極力抑制されるので、第1移動板411によって保持されている指針式計器20(指針ユニット24)や装飾ユニット30(第1部分31)のぶれが極力抑制され、商品性を向上させることができる。
【0048】
動力伝達機構としての第2伝達機構423は、左右方向に所定の間隔を空けて配置された2つのプーリー423a,423bと、両者に巻回されるタイミングベルト423cと、連結部材である第2連結部材423dとを備え、タイミングベルト423cと第2連結部材423dとは後述する第2軸部によって連結される。
【0049】
プーリー423aは、図1に示すように、表示装置100の表側から見て右側に位置している。そして、この場合、プーリー423aに設けられる(プーリー423aに圧入されている)軸部である第2軸部X2と第2回動軸422aとは第2連結部材423dによって連結されている。プーリー423bは、図1に示すように、表示装置100の表側から見て左側に位置し、移動機構用筐体44に取り付けられた軸A2(図1、図2(a)参照)に回転可能に保持される。
【0050】
タイミングベルト423cは、2つのプーリー423a,423bが空転しないように所定の張力をもって取り付けられるため、プーリー423aが回転すると、プーリー423bも同様に回転する。このようにして、第2伝達機構423は、第2駆動部422で発生した回転動力(駆動力)をスライド方向(左右方向)の動力に変換して、前述のようにタイミングベルト423cに取り付けられた第2移動板421をスライド移動させる。
【0051】
第2連結部材423dは、図8に示すように離間するように配置される一対の基部Z1、Z2と、これら基部Z1、Z2間に挟持される(介在する)弾性体Z3とを備え、駆動力の発生に伴い回動する第2駆動部422の第1回動軸422aと第2伝達機構423のプーリ−423aに設けられる第2軸部X2とを連結(結合)する結合部材からなる。これにより第2回動軸422aの回動に連動して第2軸部X2が回動することになる。
【0052】
基部Z1、Z2は、合成樹脂材料またはアルミ等の金属材料からなり、その外形形状は略同一形状となっており、一方の基部Z1の略中央部にはプーリー423aに圧入されている第2軸部X2の下端側を軸受けするための貫通孔からなる第3軸受部Z4が形成されている。換言すれば、第2軸部X2は、その上端側がプーリー423aに圧入されるとともにその下端側が第3軸受部Z4に圧入される構成となっている。
【0053】
なお、図7中、Z5、Z6は基部Z1の背後から基部Z2側に向けて突出形成された一対の第5、第6の突出部であり、これら第5、第6の突出部Z5、Z6は、相対する(向かいあう)ように図8中、基部Z1の左右に位置しており、第5の突出部Z5は弾性体Z3の後述する第5嵌合部P5に嵌合固定されるとともに第6の突出部Z6は弾性体Z3の後述する第6嵌合部Q6に嵌合固定される。
【0054】
また、一方の基部Z1と対をなす他方の基部Z2の略中央部には第2駆動部422の第2回動軸422aの上端側を軸受けするための貫通孔からなる第4軸受部(図示せず)が形成されている。なお、図8中、Z7、Z8は基部Z2の表面から基部Z1側に向けて突出形成された一対の第7、第8の突出部であり、これら第7、第8の突出部Z7、Z8は、相対する(向かいあう)ように図8中、基部Z2の上下に位置しており、第7の突出部Z7は弾性体Z3の後述する第7嵌合部P7に嵌合固定されるとともに第8の突出部Z8は弾性体Z3の後述する第8嵌合部P8に嵌合固定される。
【0055】
弾性部材である弾性体Z3は、クロロプレンゴム等の合成ゴムもしくはエラストマー樹脂からなり、その角部には切り欠き形状からなる第5嵌合部P5、第6嵌合部P6、第7嵌合部P7、第8嵌合部P8が設けられている。そして、第5嵌合部P5に第5の突出部Z5が嵌合(噛合)され、第6嵌合部P6に第2の突出部Z6が嵌合(噛合)され、第7嵌合部P7に第7の突出部Z7が嵌合(噛合)され、第8嵌合部P8に第8の突出部Z8が嵌合(噛合)されることで、基部Z1と基部Z2との間に弾性体Z3が挟持される構成となる。
【0056】
ところで、第2駆動部422から発生する駆動力によって第2回動軸422aが回動した際に、第2回動軸422aが軸ぶれした場合には、この第2回動軸422aの軸ぶれに伴う振動は、第2回動軸422aの先端に装着された第2連結部材423dへと伝達される。
【0057】
この際、第2回動軸422aの軸ぶれに伴い、第2連結部材423dへと伝達される振動は、第2連結部材423dに備えられる弾性体Z3によって吸収(減衰)されるため、プ−リー423a側にて第2連結部材423dと連結される第2軸部X2の軸ぶれ(振動)が極力抑制されることになる。この結果、プ−リー423aに装着されるタイミングベルト423c及びタイミングベルト423cに取り付けられる第2移動板421に伝わる振動も極力抑制されるので、第2移動板421によって保持されている装飾ユニット30(第2部分31)のぶれが極力抑制され、商品性を向上させることができる。
【0058】
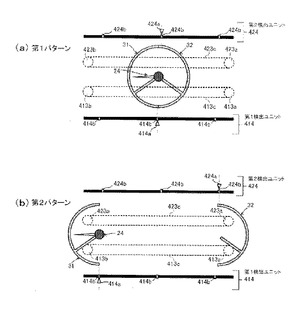
図5(a)、(b)に模式的に示す、第1検出ユニット414は、装飾ユニット30の第1部分31の位置を検出するためのものであり、例えば、フォトリフレクタから構成され、第1検出部414aと第1検出ターゲット414bとを備える。同様に、第2検出ユニット424は、装飾ユニット30の第2部分32の位置を検出するためのものであり、例えば、フォトリフレクタから構成され、第2検出部424aと第2検出ターゲット424bとから構成される。
【0059】
第1検出部414aは、例えば、赤外光を出射する発光素子と受光素子とを備え、第1検出ターゲット414bを検出すると、検出信号を後述の制御部70に供給する。第1検出ターゲット414bは、例えば、赤外光を反射する反射部であり、第1検出部414aの検出対象部である。具体的には、赤外光を照射する第1検出部414aが、第1検出ターゲット414bに対向する位置に位置すると、第1検出ターゲット414bは、第1検出部414aの発光素子が出射した赤外光を第1検出部414aに向け反射させる。そして、第1検出部414aは、その反射した光を受光素子で受光することにより、第1検出ターゲット414bを検出し、検出信号を、センサ情報入力ポート82を介して、制御部70に供給する。
第1検出部414aは、第1移動板411の所定箇所に取り付けられる。第1検出ターゲット414bは、第1部分31の移動完了位置を定めるためのものであり、第1移動板411のように移動しない箇所(例えば、移動機構用筐体44の所定箇所)に複数取り付けられる。具体的には、図5に模式的に示すように、例えば、3つの第1検出ターゲット414bが、各々、左右方向に所定間隔を空けて配置される。第1検出部414aと第1検出ターゲット414bとは、各々、表示装置100の上下方向において同じ高さに配置され、第1移動板411がスライド移動し、第1検出部414aが複数の第1検出ターゲット414bのいずれかと対向する位置にくると、第1検出部414aが反応し、第1移動板411が所定位置に位置した(つまり、第1部分31が移動完了位置にある)ことを検知する。このようにして、第1検出ユニット414は、装飾ユニット30の第1部分31の位置を検出する。
【0060】
第2検出部424aは、例えば、赤外光を出射する発光素子と受光素子とを備え、第2検出ターゲット424bを検出すると、検出信号を後述の制御部70に供給する。第2検出ターゲット424bは、例えば、赤外光を反射する反射部であり、第2検出部424aの検出対象部である。第2検出部424aが、第2検出ターゲット424を検出する仕組みは、第1検出ユニット414と同様である。
第2検出部424aは、第2移動板421の所定箇所に取り付けられる。第2検出ターゲット424bは、第2部分32の移動完了位置を定めるためのものであり、第2移動板421のように移動しない箇所(例えば、移動機構用筐体44の所定箇所)に複数取り付けられる。具体的には、図5に模式的に示すように、例えば、3つの第2検出ターゲット424bが、各々、左右方向に所定間隔を空けて配置される。第2検出部424aと第2検出ターゲット424bとは、各々、表示装置100の上下方向において同じ高さに配置され、第2移動板421がスライド移動し、第2検出部424aが複数の第2検出ターゲット424bのいずれかと対向する位置にくると、第2検出部424aが反応し、第2移動板421が所定位置に位置した(つまり、第2部分32が移動完了位置にある)ことを検知する。このようにして、第2検出ユニット424は、装飾ユニット30の第2部分32の位置を検出する。
【0061】
第1移動板411,第2移動板421は、第1検出ターゲット414b,第2検出ターゲット424bの配設位置を基準として停止するため、第1伝達機構413と第2伝達機構423を構成する各部が、温度変化により膨張収縮したり、摩耗したりすることによっては、移動後の位置がずれることがなく、精度良く移動が可能である。このため、第1移動板411及び第2移動板421とディスプレイ装置10との位置合わせが容易である。
【0062】
スライド機構43は、第1移動板411と第2移動板421とを、摩擦力の影響を極力抑えつつ左右方向に案内するスライドレールであり、移動機構用筐体44に取り付けられる。スライド機構43は、例えば、図2(a)、(b)に示すように、ボールベアリング43aと左右方向に延びるレール部43bとを備える。この場合、ボールベアリング43aとしてステンレスボールベアリングを採用し、また、レール部44bもステンレスにより形成することで、温度変化、振動が発生しても、スライド抵抗を抑えることができるスライド機構を構成するとよい。第1移動板411と第2移動板421とは、それぞれ、裏面側に図示しない摺動部を備え、この摺動部がスライド機構43を摺動することで、左右方向に案内される。第1移動板411は、第1駆動部412の駆動力を第1伝達機構413を介して得ることで、このスライド機構43を摺動する。また、第2移動板421は、第2駆動部422の動力を第2伝達機構423を介して得ることで、このスライド機構43を摺動する。
なお、本実施形態では、スライド機構43を、第1移動板411と第2移動板412とに共用のスライドレールとして説明したが、第1移動板411と第2移動板412とのそれぞれに独立したスライドレールを設けてもよい。
【0063】
移動機構用筐体44は、第1移動機構41、第2移動機構42に共用の筐体であり、例えば樹脂材料やアルミ等の非磁性金属から形成される。
【0064】
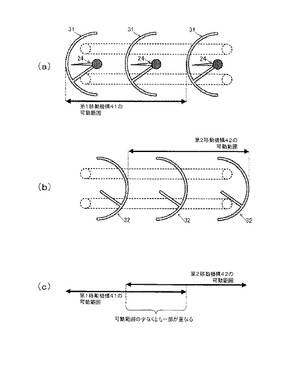
ここで、移動機構40の第1移動機構41と第2移動機構42、それぞれの可動範囲について、図6(a)〜(c)を参照して説明する。
【0065】
第1移動機構41は、例えば、ディスプレイ装置10の表示領域内で第1部分31を左右方向に移動させる。本実施形態では、第1部分31の停止位置は、表示領域の左端部、中央部、右端部の3つであり、これらの停止位置は、3つの第1検出ターゲット414bの配設位置によって規定される。第1移動機構41の可動範囲は、第1部分31が、表示領域の左端部から右端部まで移動する範囲であり、例えば、第1部分31の左端を基準にすれば、図6(a)に示すようになる。
【0066】
第2移動機構42は、例えば、ディスプレイ装置10の表示領域内で第2部分32を左右方向に移動させる。本実施形態では、第2部分32の停止位置は、表示領域の左端部、中央部、右端部の3つであり、これらの停止位置は、3つの第2検出ターゲット424bの配設位置によって規定されている。第2移動機構42の可動範囲は、第2部分32が、表示領域の左端部から右端部まで移動する範囲であり、例えば、第2部分32の右端を基準にすれば、図6(b)に示すようになる。
【0067】
本実施形態に係る表示装置100では、第1移動機構413、第2移動機構423、第1検出ユニット414、第2検出ユニット424を調節することにより、第1移動機構413と第2移動機構423とは、両者の可動範囲が一部重なる(図6(c)参照)ように構成されている。このように第1部分31と第2部分32の可動範囲を一部重なるように構成することにより、両者の可動範囲を広くとることができるため、装飾ユニット30の状態を、後述する第1〜第3パターンのように、様々な状態に変化することができる。また、装飾ユニットの形態の変化に合わせて、ディスプレイ装置10の表示画像を変化させることで、多様な表示形態での表示が可能である。
【0068】
回路基板50は、板状の基材に後述の制御部70を実装した回路基板であり、移動機構40の裏側に位置する。回路基板50は、ケース体60の内面に支持される。
【0069】
ケース体60は、上記各部(ディスプレイ装置10、指針式計器20、装飾ユニット30、移動機構40、回路基板50)を収納する筐体であり、収納体61と、透明カバー62と、から構成される。収納体61は、表側開口の箱状部材であり、その開口部に透明カバー62が取り付けられる。
【0070】
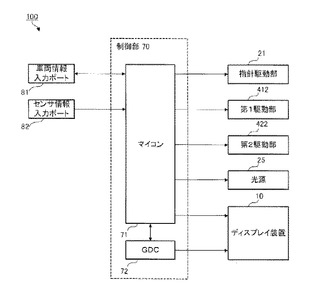
次に、図9を参照して、表示装置100の電気的構成について説明する。表示装置100は、制御部70と、車両情報入力ポート81と、センサ情報入力ポート82と、前述したディスプレイ装置10、指針駆動部21、光源25、第1駆動部413及び第2駆動部423と、を備える。
【0071】
制御部70は、マイコン71と、グラフィックディスプレイコントローラー(GDC)72と、指針駆動部21、第1駆動部412、第2駆動部422、ディスプレイ装置10のバックライト等を駆動する各種ドライバIC(図示せず)と、を備える。制御部70は、例えば、車速、エンジン回転数、エンジン温度、残燃料の量等の各種計測量を算出し、ディスプレイ装置10、指針式計器20の動作を制御し、算出した計測量を表示させる。
【0072】
マイコン71は、CPU、ROM、RAM、入出力インターフェイス等を備え、車両情報入力ポート81及びセンサ情報入力ポート82から入力された各種情報を受け付け、各部に制御信号を供給する。マイコン71のCPUは、例えば、ROM内に予め記憶された、後述する表示形態変形処理を実行するための所定プログラムを読み出し実行する。GDC72は、マイコン71と協働して、ディスプレイ装置10の表示を制御する。
【0073】
車両情報入力ポート81は、i)車両ECUから通信ラインにより伝送される各種状態情報、ii)バックカメラから送信されるバックモニタ画像情報、iii)ユーザが、ハンドル周辺の操作スイッチ、インパネ周辺の各種コントロールスイッチ、表示装置100に配設された入力スイッチ等を操作した際の操作内容を示す操作信号、等の車両情報が入力されるポートである。
【0074】
センサ情報入力ポート82は、第1検出部414a及び第2検出部424aからの検出信号が入力されるポートである。この検出信号は、i)第1検出部414aが第1検出ターゲット414bを検出した際の検出信号(つまり、装飾ユニット30の第1部分31が所定の位置にあることを示す信号)と、ii)第2検出部424aが第2検出ターゲット424bを検出した際の検出信号(つまり、装飾ユニット30の第2部分32が所定の位置にあることを示す信号)である。
【0075】
以上の構成からなる表示装置100は、制御部70の制御の下、所定の情報をトリガとして、装飾ユニット30の第1部分31(及び指針式計器20)と第2部分32とを各々スライド移動させ、装飾ユニット30を複数の状態に変形させるとともに、その状態に対応させてディスプレイ装置10の表示を変化させる。
表示装置100は、制御部70により移動機構40を駆動制御して、装飾ユニット30を、例えば図5に示すように、第1部材31と第2部材32とがディスプレイ装置10の表示領域の中央部で、リング形状を表現する「第1パターン」の状態と、第1部材31が表示領域の左端部に位置し、且つ、第2部材32が表示領域の右端部に位置する「第2パターン」の状態と、に変形させる。なお、状態に対応させたディスプレイ装置10の表示変化については、後に詳述する。このような、表示装置100の動作は、制御部70のCPUが実行する表示形態変形処理によって実現される。以下、図8等を参照してこの処理を説明する。
【0076】
(表示形態変形処理)
表示形態変形処理は、車両情報入力ポート81を介し、送信されてきた所定の信号を、制御部70が受け付けたことを条件に開始される。開始トリガとしての所定の信号は、例えば表示装置100が搭載されている車両のドアがオープンされたことを示す信号である。
【0077】
表示形態変形処理を開始すると、まず、制御部70は、前回の表示形態変形処理終了時に「第1パターン」の状態(図5(a)参照)になっていた装飾ユニット30の第1部分31(及び指針式計器20)を左端に、第2部分32を右端に移動させる(つまり、装飾ユニット30を「第2パターン」の状態(図5(b)参照)にする)イニシャライズ動作を実行する(ステップS1)。
具体的には、制御部70は、第1駆動部412を駆動制御し、第1移動板411を左方向にスライド移動させる。そして、制御部70は、第1検出ユニット414と協働して、第1移動板411が左端部に位置したことを検出すると(つまり、第1検出部414aが3つの第1検出ターゲット414bのうち左端部に位置する第1検出ターゲット414bと対向する位置に位置することで、第1検出部414aから供給される検出信号を受け付けると)、第1駆動部412の回転動作を停止させ、停止位置(検出位置)を今回動作の第1移動板411の原点(基準位置)とする。それと同時に、制御部70は、第2駆動部422を駆動制御し、第2移動板421を右方向にスライド移動させる。そして、制御部70は、第2検出ユニット424と協働して、第2移動板421が右端部に位置したことを検出すると(つまり、第2検出部424aが3つの第2検出ターゲット424bのうち右端部に位置する第2検出ターゲット424bと対向する位置に位置することで、第2検出部424bから供給される検出信号を受け付けると)、第2駆動部422の回転動作を停止させ、停止位置(検出位置)を今回動作の第2移動板421の原点(基準位置)とする。制御部70は、ステップS1において、このようなイニシャライズ動作を実行する。
【0078】
続いて、制御部70は、装飾ユニット30を「第1パターン」の状態にする初期動作を実行する(ステップS2)。
具体的には、制御部70は、第1駆動部412を駆動制御し、第1移動板411を右方向にスライド移動させる。そして、制御部70は、第1検出ユニット414と協働して、第1移動板411が中央部に位置したことを検出すると(つまり、第1検出部414aが3つの第1検出ターゲット414bのうち中央部に位置する第1検出ターゲット414bと対向する位置に位置することで、第1検出部414aから供給される検出信号を受け付けると)、第1駆動部412の回転動作を停止させる。それと同時に、制御部70は、第2駆動部422を駆動制御し、第2移動板421を左方向にスライド移動させる。そして、制御部70は、第2検出ユニット424と協働して、第2移動板421が中央部に位置したことを検出すると(つまり、第2検出部424aが3つの第2検出ターゲット424bのうち中央部に位置する第2検出ターゲット424bと対向する位置に位置することで、第2検出部424bから供給される検出信号を受け付けると)、第2駆動部422の回転動作を停止させる。制御部70は、このようにして、装飾ユニット30を「第1パターン」の状態にする初期動作を実行する。
【0079】
なお、第1パターンの状態では、第1部分31と第2部分32とは当接せずに、近接する。これにより、図3(c)に示すように、第1部分31と第2部分32との間には隙間部Gが形成される。隙間部Gは、移動機構40の移動精度誤差や、移動してきた第1移動板411及び第2移動板421が停止した際の反動で微動することによって、第1部分31と第2部分32とが当接しないように設けられる。第1検出ユニット414、第2検出ユニット424等を適宜調整することにより、このような隙間部Gが形成されるように表示装置100は構成される。また、本実施形態では、上記のように、第1部分31に隙間部Gを、表示装置100を表側から見た(正視した)場合に、覆い隠すリブr1が形成されており、これによって、近接時に間欠(隙間)のないリング形状を表現している。
【0080】
続いて、制御部70は、イグニッションがオンされたか否かを判別する(ステップS3)。制御部70は、車両情報入力ポート81を介して、イグニッションがオンされたことを示す信号を受け付けた場合に、イグニッションがオンされたと判別し(ステップS3;Yes)、ステップS4に処理を進める。一方、イグニッションがオンされていないと判別した場合(ステップS3;No)、ステップS3の処理を再度実行する。この場合、イグニッション・オンを示す信号を受け付けるまで、制御部70は待機することになる。
【0081】
ステップS4で、制御部70は、オープニング動作を実行する。オープニング動作は、例えば、ディスプレイ装置10に所定のオープニング画像を表示したり、指針式計器20の指針ユニット24をスイープさせたり、光源25やディスプレイ装置10のバックライトを点灯または点滅させたりする動作である。
【0082】
続いて、制御部70は、ギアがリバースギアであるか否かを判別する(ステップS5)。具体的には、制御部70は、車両情報入力ポート81を介し、ギアがリバースギアにシフトされたことを示す信号を受け付けるとリバースギアであると判別し(ステップS5;Yes)、ステップS8の処理を実行する。制御部70は、リバースギアでないと判別した場合(ステップS5;No)、ステップS6の処理を実行する。
【0083】
ステップS6で、制御部70は、第1駆動部412及び第2駆動部422を制御し、装飾ユニット30を「第1パターン」の状態にする。具体的な、制御方法については、ステップS2と同様である。なお、現在、既に、装飾ユニット30が「第1パターン」の状態にあるときは、制御部70は、その状態を維持する。
続いて、制御部70のマイコン71は、GDC72と協働して、ディスプレイ装置10の表示を走行時画面表示にする(ステップS7)。走行時画面表示とは、例えば、図7(a)に示すような走行時画面91の下、車両情報入力ポート81を介し、送信されてきた車両情報に応じて、ディスプレイ装置10及び指針式計器20に各種計測量を表示させる表示である。より具体的には、走行時画面表示において、ディスプレイ装置10は、その表示領域に、走行時画面91として、エンジン回転数を表示するタコメータTm、燃料の残量を表示する燃料計Fm、バッテリー残量を示すバッテリー計Bm、走行モードを表示するモード表示Md、速度計用の指標部In等を表示する。速度計用の指標部Inは、図示するように、表示領域の中央部に位置する装飾ユニット30(「第1パターン」の状態)のリング形状の内部に表示される数値、目盛り、図形等であり、このような指標部Inと指針式計器20と第1パターンの状態にある装飾ユニット30とで、車速計Smが表現される。この場合、車速計Sm以外の計器は、ディスプレイ装置10に表示されたデジタル表示されるものであるが、車速計Smは、アナログの指針式計器20(及び装飾ユニット30)とディスプレイ装置10にデジタル表示された指標部Inとによって表現される。つまり、装飾ユニット30は、車速計Smの枠として機能し、この枠に沿うように(装飾ユニット30の形状に合わせて)、ディスプレイ装置10は、数値、目盛り等を車速を報知するための報知画像として表示する。なお、現在、既に、走行時画面表示の状態にあるときは、制御部70は、その状態を維持する。
制御部70は、ステップS6、S7の処理を実行すると、処理をステップS10に進める。
【0084】
ステップS5で、ギアがリバースギアであると判別した場合(ステップS5;Yes)、制御部70は、第1駆動部412及び第2駆動部422を制御し、装飾ユニット30を「第2パターン」の状態にする(ステップS8)。具体的な、制御方法については、ステップS1と同様である。なお、現在、既に、装飾ユニット30が「第2パターン」の状態にあるときは、制御部70は、その状態を維持する。
続いて、制御部70のマイコン71は、GDC72と協働して、ディスプレイ装置10の表示をバックモニタ表示にする(ステップS9)。バックモニタ表示とは、例えば、図8(b)に示すようなバックモニタ用画面92の下、車両情報入力ポート81を介し、送信されてきた車両情報に応じて、ディスプレイ装置10及び指針式計器20に各種計測量を表示させる表示である。より具体的には、バックモニタ表示において、ディスプレイ装置10は、その表示領域に、バックモニタ用画面92として、i)表示領域の左端部に位置する装飾ユニット30の第1部分31の内部に、その半円弧形状に合わせて速度計用の数値、目盛り、図形等からなる指標部Inを表示し、ii)表示領域の右端部に位置する第2部分32の内部に、その半円弧形状に合わせてワーニング表示Wa1、Wa2を表示し、iii)左右に開いた第1部分31と第2部分32の間に出現する矩形状の領域にバックモニタBmを表示する。
バックモニタBmには、車両後部に搭載され、外部を撮影するバックカメラ(図示せず)の撮影画像が映し出される。ワーニング表示Wa1,Wa2は、例えば、車両の後退時に障害物が近接した場合の警告表示、現在、後退時であることを運転者に知らせる警告表示等である。また、指標部Inと指針式計器20と第2パターンの状態にある装飾ユニット30の第1部分31とで、車速計Smが表現される。この場合は、第1部分31が、車速計Smの枠として機能し、この枠に沿うように(第1部分31の形状に合わせて)、ディスプレイ装置10は、数値、目盛り等を車速を報知するための報知画像として表示する。また、第2部分32が、ワーニング表示Wa1,Wa2を表示する計器の枠として機能し、この枠の形状に合わせて、ディスプレイ装置10は、警告情報を知らせるための報知画像をワーニング表示Wa1,Wa2として表示する。なお、現在、既に、バックモニタ表示の状態にあるときは、制御部70は、その状態を維持する。
制御部70は、ステップS8、S9の処理を実行すると、処理をステップS10に進める。
【0085】
ステップS10で、制御部70は、イグニッションがオフされたか否かを判別する。制御部70は、車両情報入力ポート81を介して、イグニッションがオフされたことを示す信号を受け付けた場合に、イグニッションがオフされたと判別し(ステップS10;Yes)、ステップS11に処理を進める。一方、イグニッションがオフされていないと判別した場合(ステップS10;No)、処理をステップS5に戻す。
【0086】
ステップS11で、制御部70は、装飾ユニット30を「第1パターン」の状態にする終了動作を実行する。具体的な、制御方法については、ステップS2と同様である。なお、現在、既に、装飾ユニット30が「第1パターン」の状態にあるときは、制御部70は、その状態を維持する。
ステップS11の処理を実行すると制御部70は、表示形態変形処理を終了する。
【0087】
以上のように本実施形態では、表示領域に所定の画像を表示するディスプレイ装置10と、このディスプレイ装置10の前方側に配置される可動部材30と、この可動部材30を移動させる移動機構40とを有し、移動機構40が、駆動力を発生する駆動装置としての第1駆動部412と、駆動力を可動部材30に伝達するための動力伝達機構としての第1伝達機構413とを備えてなる表示装置100において、第1伝達機構413は、駆動力の発生に伴い回動する第1駆動部412の第1回動軸412aと第1伝達機構413に設けられる第1軸部X1とを連結する第1連結部材413dを備え、この第1連結部材413dには弾性体Y3が含まれているものである。
【0088】
従って、第1駆動部412の駆動時に生じる第1回動軸412aの軸ぶれ(振動)は第1連結部材413dに備えられる弾性体Y3によって吸収(減衰)されるため、第1軸部X1、プ−リー413a、413b、タイミングベルト413c並びに第1移動板411の各部材を介して第1連結部材413dと連結されている装飾ユニット30の第1部分31のぶれが極力抑制され、商品性を向上させることができる。さらに、第1部分31上に指針式計器20の指針ユニット24が載置されている構成にあっては、指針ユニット24の導光指針24bのぶれも抑制されるため、指針の動作に悪影響を与える虞がなくなり、商品性の高い表示装置を提供することができる。
【0089】
また本実施形態では、表示領域に所定の画像を表示するディスプレイ装置10と、このディスプレイ装置10の前方側に配置される可動部材30と、この可動部材30を移動させる移動機構40とを有し、移動機構40が、駆動力を発生する駆動装置としての第2駆動部422と、駆動力を可動部材30に伝達するための動力伝達機構としての第2伝達機構423とを備えてなる表示装置100において、第2伝達機構423は、駆動力の発生に伴い回動する第2駆動部422の第2回動軸422aと第2伝達機構423に設けられる第2軸部X2とを連結する第2連結部材423dを備え、この第2連結部材413dには弾性体Z3が少なくとも含まれているものである。
【0090】
従って、第2駆動部422の駆動時に生じる第2回動軸422aの軸ぶれ(振動)は第2連結部材423dに備えられる弾性体Z3によって吸収(減衰)されるため、第2軸部X2、プ−リー423a、423b、タイミングベルト423c並びに第2移動板421の各部材を介して第2連結部材423dと連結されている装飾ユニット30の第2部分32のぶれが極力抑制される。このように各軸部X1、X2の軸ぶれに伴う装飾ユニット30、指針ユニット24のぶれが極力抑制されるので、商品性の向上した表示装置を提供することができる。
【0091】
また本実施形態では、表示装置100が実体の指針式計器20を備える例を示したが、これに限られない。表示装置は、実体指針を備えず、ディスプレイ装置10に指針を表示させたり、数値(計測値)を表示させたりしてもよい。
【0092】
なお、本実施形態では、表示装置が車両に搭載される車両用計器である例を示したが、これに限られない。表示装置は、水上バイク、耕作機械、航空機、船舶、電車等に搭載される計器であってもよい。
【符号の説明】
【0093】
100 表示装置
10 ディスプレイ装置(表示手段)
20 指針式計器
24 指針ユニット
30 装飾ユニット(可動部材)
31 第1部分
32 第2部分
40 移動機構
41 第1移動機構
411 第1移動板
412 第1駆動部(駆動装置)
412a 第1回動軸(回動軸)
413 第1伝達機構(動力伝達機構)
413d 第1連結部材(連結部材)
414 第1検出ユニット
415 第1連結部材(連結部材)
42 第2移動機構
421 第2移動板
422 第2駆動部(駆動装置)
422a 第2回動軸(回動軸)
423 第2伝達機構(動力伝達機構)
423d 第2連結部材(連結部材)
424 第2検出ユニット
43 スライド機構
44 移動機構用筐体
X1 第1軸部(軸部)
X2 第2軸部(軸部)
Y3、Z3 弾性体
【技術分野】
【0001】
本発明は、表示領域に所定の画像を表示する表示手段と、この表示手段の前方側に配置される可動部材と、この可動部材を移動させる移動機構とを備えた表示装置に関するものである。
【背景技術】
【0002】
従来より、この種の表示装置にあっては、例えば下記特許文献1に記載されているものが知られている。この特許文献1に記載の表示装置は、車両に搭載される指示計器装置からなり、表示領域に所定の画像(例えば目盛等の指標画像)を表示する表示器(表示手段)と、この表示器の前方側に配置される透光性材料からなる円板状の可動部材と、前記指標画像を指示するように可動部材上に載置される指針と、可動部材を移動させる移動機構とを有し、可動部材の周縁には前記指標画像を取り囲むようにリング形状からなる環状部が載置されている。
【0003】
移動機構は、駆動力を発生するステッピングモータからなる駆動装置と、前記駆動力を可動部材に伝達するためのアーム部(動力伝達機構)とを備え、このアーム部は、その一端側が駆動装置の回動軸に固定されるとともに、その他端側が可動部材に固定されている。そして、駆動力の発生に伴い駆動装置の回動軸が回動すると、回動軸の回動に伴う動力がアーム部を介して可動部材へと伝達され、これにより可動部材が表示器上を左右に移動する構成となっている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2010−175411号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、特許文献1に記載の表示装置の場合、駆動力の発生に伴い駆動装置の回動軸が回動すると、回動軸が軸ぶれ(振動)することに起因して、回動軸の回動に伴う動力がアーム部(動力伝達機構)を介して可動部材へと伝達された際に、回動軸の軸ぶれに伴って表示器上を移動する可動部材にぶれが生じ、商品性が低下してしまうという問題がある。また、例えば特許文献1に記載の表示装置のごとき、可動部材上に指針が搭載されている構成にあっては、回動軸の軸ぶれに伴って可動部材だけではなく可動部材に載置されている指針も左右にぶれて指針の動作にも悪影響を与えることになり、更なる商品性の低下を招く虞がある。
そこで本発明は、前述の課題に対して対処するため、回動軸の軸ぶれに伴う可動部材のぶれを極力抑制し、商品性を向上させることが可能な表示装置の提供を目的とするものである。
【課題を解決するための手段】
【0006】
本発明は、表示領域に所定の画像を表示する表示手段と、前記表示手段の前方側に配置される可動部材と、前記可動部材を移動させる移動機構とを有し、前記移動機構が、駆動力を発生する駆動装置と、前記駆動力を前記可動部材に伝達するための動力伝達機構とを備えてなる表示装置において、前記動力伝達機構は、前記駆動力の発生に伴い回動する前記駆動装置の回動軸と前記動力伝達機構に設けられる軸部とを連結する連結部材を備え、前記連結部材には弾性体が含まれていることを特徴とする。
【発明の効果】
【0007】
本発明によれば、初期の目的を達成でき、回動軸の軸ぶれに伴う可動部材のぶれを極力抑制し、商品性を向上させることが可能な表示装置を提供できる。
【図面の簡単な説明】
【0008】
【図1】本発明の一実施形態に係る表示装置の外形を示す概略図であり、表示装置における第1駆動装置、第2駆動装置、第1伝達機構、第2伝達機構の各部の位置を説明するための模式図である。
【図2】(a)は図1の表示装置を上側から見た場合の概略透過図であり、(b)は図1中、A−A線概略断面図である。
【図3】(a)は図1の表示装置を表側から見た場合の指針ユニットと装飾ユニットを示す図であり、(b)は図3(a)のB−B線概略断面図であり、(c)は図3(a)の矢視Cにおける装飾ユニットの要部側面図である。
【図4】(a)は装飾ユニットの斜視図であり、(b)は図4(a)の装飾ユニットの分解斜視図である。
【図5】(a)は第1パターンにある状態の装飾ユニットを説明するための図であり、第1及び第2検出ユニットを説明するための図である。(b)は第2パターンにある状態の装飾ユニットを説明するための図であり、第1及び第2検出ユニットを説明するための図である。
【図6】(a)は第1移動機構の可動範囲を説明するための図であり、(b)は第2移動機構の可動範囲を説明するための図であり、(c)は第1移動機構の可動範囲と第2移動機構の可動範囲の関係を示す図である。
【図7】本発明の一実施形態に係る第1連結部材と第1回動軸と第1軸部とを示す斜視図である。
【図8】本発明の一実施形態に係る第2連結部材と第2回動軸と第2軸部とを示す斜視図である。
【図9】本発明の一実施形態に係る表示装置の電気的構成を説明するためのブロック図である。
【図10】(a)は第1パターンでディスプレイ装置が表示する走行画面表示の一例を示す図であり、(b)は第2パターンでディスプレイ装置が表示するバックモニタ表示の一例を示す図である。
【図11】制御部が実行する表示形態変形処理のフローチャートである。
【発明を実施するための形態】
【0009】
本発明の一実施形態に係る表示装置について図面を参照して説明する。
本実施形態に係る表示装置100は、図1にその外形を示す、車両に搭載される車両用計器である。
【0010】
表示装置100は、図2(a)、(b)に示すように、ディスプレイ装置(表示手段)10と、指針式計器20と、装飾ユニット(可動部材)30と、移動機構40と、回路基板50と、ケース体60と、を備える。
なお、以下では、図1に両端矢印で示すように、表示装置100の表示面方向(つまり、表示装置100に対するユーザ側方向)を「表」とし、表示面方向の反対側方向を「裏」とし、表示面を視認するユーザからみた場合の上下左右方向を、それぞれ、「上」、「下」、「左」、「右」として、説明する。
【0011】
ディスプレイ装置10は、例えばTFT型の液晶ディスプレイ装置であり、後述する制御部70の制御の下、車速、エンジン回転数、エンジン温度、燃料の残量、各種警告等からなる所定の画像を表示エリア(図示せず)に表示するものである。また、ディスプレイ装置10は、左右方向にスライド移動する指針式計器20及び装飾ユニット30の位置状態(後述する「第1パターン」、「第2パターン」等)に合わせて、表示態様を変化させる(図8(a)、(b)参照)。指針式計器20及び装飾ユニット30がどのように移動するか、ディスプレイ装置10がどのように表示態様を変化させるか、については後に詳細に説明する。
ディスプレイ装置10は、TFT液晶パネル、偏光板、バックライト、ディスプレイ用筐体等(図示せず)から構成され、例えば、ケース体60に形成された取付部材(図示せず)に取り付けられ、所定位置に配置され、支持される。
【0012】
指針式計器20は、主に図2(b)、図3(b)に示すように、指針駆動部21と、第1マグネット体22と、第2マグネット体23と、指針ユニット24と、光源25と、導通部材26とを備える。なお、後述するように、指針式計器20を構成する各部は、第1移動板411に取り付けられる装飾ユニット30の第1部分31を介して取り付けられているため、第1移動板411の移動に伴い移動する。
【0013】
指針駆動部21は、例えばステッピングモータから構成され、後述する制御部70の制御の下、計測量(例えば車速)に応じて回転軸21aを回転させる。指針駆動部21は、図2(b)に示すように、後述の第1移動板411の裏面側に取り付けられた基材Sに固定されている。回転軸21aの先端部は、基材Sに設けられた孔部So、後述する第1移動板411の開口部411aを通過し、ディスプレイ装置10のすぐ裏に位置する。
【0014】
第1マグネット体22は、回転軸21aに取り付けられ、回転軸21aの回転に伴って回転する。このように取り付けられた第1マグネット体22は、図2(b)に示すように、ディスプレイ装置10のすぐ裏に位置する。第1マグネット体22は、図3(b)に示すように、回転軸21a側のヨーク部22aと磁石部22bとから構成され、磁力を効率良く第2のマグネット23体に伝えるとともにヨーク部22aの透磁効果により、指針駆動部21に対しては、磁気影響を与え難くしている。
【0015】
第2マグネット体23は、後述の台座313に回転可能に支持されており、ディスプレイ装置10の表側であって、第1マグネット体22と対向する位置に位置する。第2マグネット体23は、第1マグネット体22からのディスプレイ装置10を透過した磁力を受け、第1のマグネット体22の回転に従って、回転する。また、第2マグネット体23は、後述する指針ユニット24の指針軸24aを支持する。
【0016】
このような第1マグネット体22と第2マグネット体23により、指針駆動部21の回転動力は、指針ユニット24へ伝えられ、指針ユニット24は回転することができる。前述したディスプレイ装置10のディスプレイ用筐体は、このように磁力を透過させる必要があるため、アルミ等の非磁性体により形成される。
【0017】
指針ユニット24は、第2マグネット体23と一体に回転する指針部材であり、図3(b)に示すように、指針軸24aと、導光指針24bと、指針キャップ24cと、を備える。
指針軸24aは、第2マグネット体23に軸支される。導光指針24bは、指針軸24aに固定され、指針軸24a側の受光部(図示せず)で光源25が出射した光を受け、発光する。導光指針24bは、無色又は有色透明の導光材料から形成される。指針キャップ24cは、導光指針24bの一部(指針軸24a近傍)を、指針軸24aの軸方向表側から覆うようにして導光指針24bに取り付けられる。指針キャップ24cは、例えば、合成樹脂により形成された黒色のキャップであり、光を透過しない。
【0018】
光源25は、指針軸24a近傍に配設される、1又は複数(例えば、2、3灯)のLEDから構成される。光源25は、図4(b)に示すように、装飾ユニット30の後述する光源取付部311dに取り付けられる。このように取り付けられた光源25は、指針ユニット24の直下(指針キャップ24cの裏側)に位置し、指針ユニット24を照光する(導光指針24bの前記受光部に向け光を出射する)。光源25は、後述する制御部70の制御の下、発光する。
【0019】
導通部材26は、図4(b)に示すように、例えば、FPC(フレキシブル配線板)からなり、光源25と後述の制御部70(マイコン71)とを接続し、制御部70から送信された制御信号を光源25に伝送する。導通部材26は、図示するように、後述の第1基材311に取り付けられる。
【0020】
可動部材である装飾ユニット30は、図4(a)に示すように、移動機構40によりそれぞれ独立して左右方向にスライド移動する第1部分31と第2部分32とから構成され、ディスプレイ装置10の前方側に配置される。
【0021】
第1部分31は、指針式計器20と共にスライド移動する部分であり、図4(b)に示すように、第1基材311と、第1装飾カバー312と、台座313と、を備える。
第2部分32は、第1部分31の右側に位置し、図4(b)に示すように、第2基材321と、第2装飾カバー322とを備える。
【0022】
第1基材311と第2基材321とは、例えば、アルミ、ステンレスの金属材料から構成され、プレス、切削等の加工により形成される。
第1基材311は、円弧部311aと、アーム部311bと、取付部311cと、光源取付部311dと、を備える。
第2基材321は、円弧部321aと、アーム部321bと、取付部321cと、を備える。
【0023】
円弧部311a,321aは、第1基材311と第2基材321とが近接した場合(図5(a)等参照)に、1つの円形状(リング形状)になるように形成されている。つまり、その円形状の、円中心を通る上下方向の線を基準として(以下、この仮想線を基準線という)、左半分の円弧形状に第1基材311の円弧部311aは形成され、右半分の円弧形状に第2基材321の円弧部321aは形成されている。
【0024】
第1基材311のアーム部311bは、円弧部311aの一部から、円弧中心に向かって延びるように形成された部材である。同様に、第2基材321のアーム部321bは、半円弧状の円弧部321aの一部から、円弧中心に向かって延びるように形成された部材である。
アーム部311bとアーム321bとは、前記基準線に対して、線対称になるように形成される。特に、第1基材311のアーム部311bは、導通部材26を光源25に案内する役割を持つ。具体的には、一端が制御部70に接続される導通部材26は、図4(b)に示すように、円弧部311aの一部に沿って取り付けられ、さらに、このアーム部311bに沿って取り付けられることで、他端が光源25に至るように配設されている。一方、第2基材321のアーム部321bは、デザイン上の要請によりこのように形成される。よって、アーム部321bを省いてもよい。
【0025】
第1基材311の取付部311cは、円弧部311aの両端から円の外周方向(上下方向)に延びるように形成された部材であり、取付孔o1を有する。同様に、第2基材321の取付部321cは、円弧部321aの両端から円の外周方向(上下方向)に延びるように形成された部材であり、取付孔o2を有する。
第1基材311の取付部311cを後述する第1移動板411に取り付け、固定することで、装飾ユニット30の第1部分31は、第1移動板411がスライド移動するに伴ってスライド移動する。具体的には、第1部分31は、取付孔o1に通したネジ等(図示せず)により第1移動板411に固定される。同様に、第2基材321の取付部321cを後述する第2移動板421に取り付け、固定することで、装飾ユニット30の第2部分32は、第2移動板421がスライド移動するに伴ってスライド移動する。具体的には、第2部分32は、取付孔o2に通したネジ等(図示せず)により第2移動板421に固定される。第1移動板411,第2移動板421がそれぞれどのようにスライド移動するかについては、後に詳述する。
【0026】
光源取付部311dは、アーム部311bの端部に取り付けられた円形状(リング形状)の部材である。光源取付部311dには、その円形状の円周に沿うように前述の光源25が取り付けられる。光源取付部311dの円中心と、円弧部311a,321aが互いに近接したときに表現される円の中心とは略一致(丁度一致も含む)する。
本実施形態において、第1基材311と第2基材321とは、第1基材311が有する光源取付部311dを除けば、前記基準線に対して、線対称に形成されている。
【0027】
第1装飾カバー312と第2装飾カバー322とは、それぞれ、金属、合成樹脂等により形成される不透過の部材である。図3(a)に示すように、第1装飾カバー312は本体部3120と複数のリブr1とから構成され、第2装飾カバー322は本体部3220と複数のリブr2とから構成される。
なお、図1、図3(a)〜(c)、図10(b)以外の図面では、リブr1,r2を省略している。
【0028】
第1装飾カバー312の本体部3120は、第1基材31の円弧部311a及びアーム部311bに対応するように(表側からの投影面積が略同一形状となるように)形成され、両者を表側から覆うように第1基材311に取り付けられる部材である。
第2装飾カバー322の本体部3220は、第2基材32の円弧部321a及びアーム部321bに対応するように(表側からの投影面積が略同一形状となるように)形成され、両者を表側から覆うように第2基材321に取り付けられる部材である。
【0029】
複数のリブr1は本体部3120の表面に形成され、複数のリブr2は本体部3220の表面に形成される。例えば、複数のリブr1,r2は、図3(a)に示すように、円弧部311a,321aが互いに近接したときに表現される円の円周方向に沿って、それぞれ、等間隔に位置する。
本実施形態では、リブr1,r2の総数は6つである。しかし、リブr1,r2は、第1装飾カバー312と第2装飾カバー322とに半分ずつに割り振られていない。第1装飾カバー312は4つのリブr1を備え、第2装飾カバー322は2つのリブr2を備える。特に、第1装飾カバー312の4つのリブr1のうち、上下方向に位置する(第2装飾カバー322に最も近い位置に位置する)2つのリブr1(図で符号に下線を付した)は、第1部分31と第2部分32とが互いに近接した時には、図3(c)に示すように、その一部が第2装飾カバー322の本体部3220にラップするように(表示装置100を表側から見た(正視した)場合に、重なるように)設けられる。近接時において、前記上下方向に位置する2つのリブr1は、第2装飾カバー322の本体部3220表面とは当接しない。
このようにすることで、第1部分31と第2部分32とでリング形状を表現する場合(図5(a)参照)に、両者を当接させずとも、意図しない間欠(隙間)が生じることなくなめらかなリング形状を表現できる。また、両者を当接させずに済むため、移動の際の衝撃を抑えることができ故障防止にも繋がる。また、両者がぶつかったときの衝撃音も発生しないため騒音防止にも繋がる。
【0030】
また、第1装飾カバー312は、不透過の部材からなり、導通部材26が配設された第1基材311を表側から覆うため、導通部材26を隠すことができる。このようにして、導通部材26をユーザから見えることなく取り付けることができる。なお、本実施形態では、第1装飾カバー312を不透過の部材としたが、導通部材26が目立たない程度においては、半透過の部材であってもよい。第2装飾カバー322も半透過の部材であってもよい。
【0031】
台座313は、図4(b)に示すように、所定の樹脂により例えば円錐台状に形成され、第2マグネット体23を回転可能に保持する部材であり、第1基材31の光源取付部311dに取り付けられる。台座313の内部には空洞の収納スペースが形成され、台座313は、この収納スペースにより、第2マグネット体23を回転可能に保持し、且つ、収納する。台座313の表側の面(円錐台の底面)の中心部には、指針ユニット24の指針軸24aの軸径より一回り大きい開口径の孔部o3が形成されている。第2マグネット体23に軸支された指針軸24aは、この孔部o3を通過する。
【0032】
移動機構40は、図2(b)等に示すように、第1移動機構41と、第2移動機構42と、スライド機構43と、移動機構用筐体44と、から構成され、装飾ユニット30をスライド移動させるために用いられる。
【0033】
第1移動機構41は、装飾ユニット30の第1部分31(及び指針式計器20)を左右方向にスライド移動させるための機構である。
第2移動機構42は、装飾ユニット30の第2部分32を左右方向にスライド移動させるための機構である。
【0034】
第1移動機構41は、第1移動板411と、駆動力を発生する駆動装置である第1駆動部412と、当該駆動力を第1部分31(装飾ユニット30)に伝達するための動力伝達機構である第1伝達機構413と、第1検出ユニット414とを備える。
第2移動機構42は、第2移動板421と、駆動力を発生する駆動装置である第2駆動部422と、当該駆動力を第2部分32(装飾ユニット30)に伝達するための動力伝達機構である第2伝達機構423と、第2検出ユニット424とを備える。
【0035】
第1移動板411、第2移動板421は、例えば、樹脂材料やアルミ等の非磁性金属から形成される部材である。
第1移動板411は、指針式計器20と装飾ユニット30の第1部分31とを保持する。また、第1移動板411は、その裏面に形成された挟持部n1により、第1伝達機構413の後述するタイミングベルト413cに取り付けられる。第1移動板411には、指針駆動部21の回転軸21aを通すための開口部411aが設けられている。第1移動板411の裏面側には、開口部411aを外周から立設し、基材取付部Cが形成されている(基材取付部Cは、第1移動板411と別体でもよい)。基材取付部Cに前述の基材Sが取り付けられ、基材Sに指針駆動部21が取り付けられることで、指針駆動部21は、第1移動板411の裏側に固定される。
第2移動板421は、装飾ユニット30の第2部分32を保持する。また、第2移動板421は、その裏面に形成された挟持部n2により、第2伝達機構423の後述するタイミングベルト423cに取り付けられる。
【0036】
駆動装置としての第1駆動部412、第2駆動部422は、それぞれ、例えば、ステッピングモータからなる。第1駆動部412は、後述の制御部70の制御の下、回動軸である第1回動軸412aを回転させる。同様に、第2駆動部422は、後述の制御部70の制御の下、回動軸である第2回動軸422aを回転させる。第2駆動部422は、図1、図2(b)に示すように、第1駆動部412の上に位置する。
【0037】
第1伝達機構413と第2伝達機構423とは、互いに、上下方向に所定の間隔を空けて配置される。このように両者を配置することで、表示装置100が表裏方向に厚くなることを避けることができるため、表示装置100を薄くすることが可能である。第1伝達機構413は、第2伝達機構423の下側に位置する。
【0038】
動力伝達機構としての第1伝達機構413は、左右方向に所定の間隔を空けて配置された2つのプーリー413a,413bと、両者に巻回されるタイミングベルト413cと、連結部材である第1連結部材413dとを備え、タイミングベルト413cと第1連結部材413dとは後述する第1軸部によって連結される。
【0039】
プーリー413aは、図1に示すように、表示装置100の表側から見て右側に位置している。そして、この場合、プーリー413aに設けられる(プーリー413aに圧入されている)軸部である第1軸部X1と第1回動軸412aとは第1連結部材413dによって連結されている。プーリー413bは、図1に示すように、表示装置100の表側から見て左側に位置し、移動機構用筐体44に取り付けられた軸A1(図1参照)に回転可能に保持される。
【0040】
タイミングベルト413cは、2つのプーリー413a,413bが空転しないように所定の張力をもって取り付けられるため、プーリー413aが回転すると、プーリー413bも同様に回転する。このようにして、第1伝達機構413は、第1駆動部412で発生した回転動力(駆動力)をスライド方向(左右方向)の動力に変換して、前述のようにタイミングベルト413cに取り付けられた第1移動板411をスライド移動させる。
【0041】
第1連結部材413dは、図7に示すように離間するように配置される一対の基部Y1、Y2と、これら基部Y1、Y2間に挟持される(介在する)弾性体Y3とを備え、駆動力の発生に伴い回動する第1駆動部412の第1回動軸412aと第1伝達機構413のプーリ−413aに設けられる第1軸部X1とを連結(結合)する結合部材からなる。これにより第1回動軸412aの回動に連動して第1軸部X1が回動することになる。
【0042】
基部Y1、Y2は、合成樹脂材料またはアルミ等の金属材料からなり、その外形形状は略同一形状となっており、一方の基部Y1の略中央部にはプーリー413aに圧入されている第1軸部X1の下端側を軸受けするための貫通孔からなる第1軸受部Y4が形成されている。換言すれば、第1軸部X1は、その上端側がプーリー413aに圧入されるとともにその下端側が第1軸受部Y4に圧入される構成となっている。
【0043】
なお、図7中、Y5、Y6は基部Y1の背後から基部Y2側に向けて突出形成された一対の第1、第2の突出部であり、これら第1、第2の突出部Y5、Y6は、相対する(向かいあう)ように図7中、基部Y1の左右に位置しており、第1の突出部Y5は弾性体Y3の後述する第1嵌合部P1に嵌合固定されるとともに第2の突出部Y6は弾性体Y3の後述する第2嵌合部P2に嵌合固定される。
【0044】
また、一方の基部Y1と対をなす他方の基部Y2の略中央部には第1駆動部412の第1回動軸412aの上端側を軸受けするための貫通孔からなる第2軸受部(図示せず)が形成されている。なお、図7中、Y7、Y8は基部Y2の表面から基部Y1側に向けて突出形成された一対の第3、第4の突出部であり、これら第3、第4の突出部Y7、Y8は、相対する(向かいあう)ように図7中、基部Y2の上下に位置しており、第3の突出部Y7は弾性体Y3の後述する第3嵌合部P3に嵌合固定されるとともに第4の突出部Y6は弾性体Y3の後述する第4嵌合部P4に嵌合固定される。
【0045】
弾性部材である弾性体Y3は、クロロプレンゴム等の合成ゴムもしくはエラストマー樹脂からなり、その角部には切り欠き形状からなる第1嵌合部P1、第2嵌合部P2、第3嵌合部P3、第4嵌合部P4が設けられている。そして、第1嵌合部P1に第1の突出部Y5が嵌合(噛合)され、第2嵌合部P2に第2の突出部Y6が嵌合(噛合)され、第3嵌合部P3に第3の突出部Y7が嵌合(噛合)され、第4嵌合部P4に第4の突出部Y8が嵌合(噛合)されることで、基部Y1と基部Y2との間に弾性体Y3が挟持される構成となる。なお、このように基部Y1と基部Y2とが噛み合うように固定されることで、第1回動軸412aの回動に連動して連結部材413dが回転する際に、基部Y1、Y2間の遊び(バックラッシュ)を低減することができる。
【0046】
ところで、第1駆動部412から発生する駆動力によって第1回動軸412aが回動した際に、第1回動軸412aが軸ぶれした場合には、この第1回動軸412aの軸ぶれに伴う振動は、第1回動軸412aの先端に装着された第1連結部材413dへと伝達される。
【0047】
この際、第1回動軸412aの軸ぶれに伴い、第1連結部材413dへと伝達される振動は、第1連結部材413dに備えられる弾性体Y3によって吸収(減衰)されるため、プ−リー413a側にて第1連結部材413dと連結される第1軸部X1の軸ぶれ(振動)が極力抑制されることになる。この結果、プ−リー413aに装着されるタイミングベルト413c及びタイミングベルト413cに取り付けられる第1移動板411に伝わる振動も極力抑制されるので、第1移動板411によって保持されている指針式計器20(指針ユニット24)や装飾ユニット30(第1部分31)のぶれが極力抑制され、商品性を向上させることができる。
【0048】
動力伝達機構としての第2伝達機構423は、左右方向に所定の間隔を空けて配置された2つのプーリー423a,423bと、両者に巻回されるタイミングベルト423cと、連結部材である第2連結部材423dとを備え、タイミングベルト423cと第2連結部材423dとは後述する第2軸部によって連結される。
【0049】
プーリー423aは、図1に示すように、表示装置100の表側から見て右側に位置している。そして、この場合、プーリー423aに設けられる(プーリー423aに圧入されている)軸部である第2軸部X2と第2回動軸422aとは第2連結部材423dによって連結されている。プーリー423bは、図1に示すように、表示装置100の表側から見て左側に位置し、移動機構用筐体44に取り付けられた軸A2(図1、図2(a)参照)に回転可能に保持される。
【0050】
タイミングベルト423cは、2つのプーリー423a,423bが空転しないように所定の張力をもって取り付けられるため、プーリー423aが回転すると、プーリー423bも同様に回転する。このようにして、第2伝達機構423は、第2駆動部422で発生した回転動力(駆動力)をスライド方向(左右方向)の動力に変換して、前述のようにタイミングベルト423cに取り付けられた第2移動板421をスライド移動させる。
【0051】
第2連結部材423dは、図8に示すように離間するように配置される一対の基部Z1、Z2と、これら基部Z1、Z2間に挟持される(介在する)弾性体Z3とを備え、駆動力の発生に伴い回動する第2駆動部422の第1回動軸422aと第2伝達機構423のプーリ−423aに設けられる第2軸部X2とを連結(結合)する結合部材からなる。これにより第2回動軸422aの回動に連動して第2軸部X2が回動することになる。
【0052】
基部Z1、Z2は、合成樹脂材料またはアルミ等の金属材料からなり、その外形形状は略同一形状となっており、一方の基部Z1の略中央部にはプーリー423aに圧入されている第2軸部X2の下端側を軸受けするための貫通孔からなる第3軸受部Z4が形成されている。換言すれば、第2軸部X2は、その上端側がプーリー423aに圧入されるとともにその下端側が第3軸受部Z4に圧入される構成となっている。
【0053】
なお、図7中、Z5、Z6は基部Z1の背後から基部Z2側に向けて突出形成された一対の第5、第6の突出部であり、これら第5、第6の突出部Z5、Z6は、相対する(向かいあう)ように図8中、基部Z1の左右に位置しており、第5の突出部Z5は弾性体Z3の後述する第5嵌合部P5に嵌合固定されるとともに第6の突出部Z6は弾性体Z3の後述する第6嵌合部Q6に嵌合固定される。
【0054】
また、一方の基部Z1と対をなす他方の基部Z2の略中央部には第2駆動部422の第2回動軸422aの上端側を軸受けするための貫通孔からなる第4軸受部(図示せず)が形成されている。なお、図8中、Z7、Z8は基部Z2の表面から基部Z1側に向けて突出形成された一対の第7、第8の突出部であり、これら第7、第8の突出部Z7、Z8は、相対する(向かいあう)ように図8中、基部Z2の上下に位置しており、第7の突出部Z7は弾性体Z3の後述する第7嵌合部P7に嵌合固定されるとともに第8の突出部Z8は弾性体Z3の後述する第8嵌合部P8に嵌合固定される。
【0055】
弾性部材である弾性体Z3は、クロロプレンゴム等の合成ゴムもしくはエラストマー樹脂からなり、その角部には切り欠き形状からなる第5嵌合部P5、第6嵌合部P6、第7嵌合部P7、第8嵌合部P8が設けられている。そして、第5嵌合部P5に第5の突出部Z5が嵌合(噛合)され、第6嵌合部P6に第2の突出部Z6が嵌合(噛合)され、第7嵌合部P7に第7の突出部Z7が嵌合(噛合)され、第8嵌合部P8に第8の突出部Z8が嵌合(噛合)されることで、基部Z1と基部Z2との間に弾性体Z3が挟持される構成となる。
【0056】
ところで、第2駆動部422から発生する駆動力によって第2回動軸422aが回動した際に、第2回動軸422aが軸ぶれした場合には、この第2回動軸422aの軸ぶれに伴う振動は、第2回動軸422aの先端に装着された第2連結部材423dへと伝達される。
【0057】
この際、第2回動軸422aの軸ぶれに伴い、第2連結部材423dへと伝達される振動は、第2連結部材423dに備えられる弾性体Z3によって吸収(減衰)されるため、プ−リー423a側にて第2連結部材423dと連結される第2軸部X2の軸ぶれ(振動)が極力抑制されることになる。この結果、プ−リー423aに装着されるタイミングベルト423c及びタイミングベルト423cに取り付けられる第2移動板421に伝わる振動も極力抑制されるので、第2移動板421によって保持されている装飾ユニット30(第2部分31)のぶれが極力抑制され、商品性を向上させることができる。
【0058】
図5(a)、(b)に模式的に示す、第1検出ユニット414は、装飾ユニット30の第1部分31の位置を検出するためのものであり、例えば、フォトリフレクタから構成され、第1検出部414aと第1検出ターゲット414bとを備える。同様に、第2検出ユニット424は、装飾ユニット30の第2部分32の位置を検出するためのものであり、例えば、フォトリフレクタから構成され、第2検出部424aと第2検出ターゲット424bとから構成される。
【0059】
第1検出部414aは、例えば、赤外光を出射する発光素子と受光素子とを備え、第1検出ターゲット414bを検出すると、検出信号を後述の制御部70に供給する。第1検出ターゲット414bは、例えば、赤外光を反射する反射部であり、第1検出部414aの検出対象部である。具体的には、赤外光を照射する第1検出部414aが、第1検出ターゲット414bに対向する位置に位置すると、第1検出ターゲット414bは、第1検出部414aの発光素子が出射した赤外光を第1検出部414aに向け反射させる。そして、第1検出部414aは、その反射した光を受光素子で受光することにより、第1検出ターゲット414bを検出し、検出信号を、センサ情報入力ポート82を介して、制御部70に供給する。
第1検出部414aは、第1移動板411の所定箇所に取り付けられる。第1検出ターゲット414bは、第1部分31の移動完了位置を定めるためのものであり、第1移動板411のように移動しない箇所(例えば、移動機構用筐体44の所定箇所)に複数取り付けられる。具体的には、図5に模式的に示すように、例えば、3つの第1検出ターゲット414bが、各々、左右方向に所定間隔を空けて配置される。第1検出部414aと第1検出ターゲット414bとは、各々、表示装置100の上下方向において同じ高さに配置され、第1移動板411がスライド移動し、第1検出部414aが複数の第1検出ターゲット414bのいずれかと対向する位置にくると、第1検出部414aが反応し、第1移動板411が所定位置に位置した(つまり、第1部分31が移動完了位置にある)ことを検知する。このようにして、第1検出ユニット414は、装飾ユニット30の第1部分31の位置を検出する。
【0060】
第2検出部424aは、例えば、赤外光を出射する発光素子と受光素子とを備え、第2検出ターゲット424bを検出すると、検出信号を後述の制御部70に供給する。第2検出ターゲット424bは、例えば、赤外光を反射する反射部であり、第2検出部424aの検出対象部である。第2検出部424aが、第2検出ターゲット424を検出する仕組みは、第1検出ユニット414と同様である。
第2検出部424aは、第2移動板421の所定箇所に取り付けられる。第2検出ターゲット424bは、第2部分32の移動完了位置を定めるためのものであり、第2移動板421のように移動しない箇所(例えば、移動機構用筐体44の所定箇所)に複数取り付けられる。具体的には、図5に模式的に示すように、例えば、3つの第2検出ターゲット424bが、各々、左右方向に所定間隔を空けて配置される。第2検出部424aと第2検出ターゲット424bとは、各々、表示装置100の上下方向において同じ高さに配置され、第2移動板421がスライド移動し、第2検出部424aが複数の第2検出ターゲット424bのいずれかと対向する位置にくると、第2検出部424aが反応し、第2移動板421が所定位置に位置した(つまり、第2部分32が移動完了位置にある)ことを検知する。このようにして、第2検出ユニット424は、装飾ユニット30の第2部分32の位置を検出する。
【0061】
第1移動板411,第2移動板421は、第1検出ターゲット414b,第2検出ターゲット424bの配設位置を基準として停止するため、第1伝達機構413と第2伝達機構423を構成する各部が、温度変化により膨張収縮したり、摩耗したりすることによっては、移動後の位置がずれることがなく、精度良く移動が可能である。このため、第1移動板411及び第2移動板421とディスプレイ装置10との位置合わせが容易である。
【0062】
スライド機構43は、第1移動板411と第2移動板421とを、摩擦力の影響を極力抑えつつ左右方向に案内するスライドレールであり、移動機構用筐体44に取り付けられる。スライド機構43は、例えば、図2(a)、(b)に示すように、ボールベアリング43aと左右方向に延びるレール部43bとを備える。この場合、ボールベアリング43aとしてステンレスボールベアリングを採用し、また、レール部44bもステンレスにより形成することで、温度変化、振動が発生しても、スライド抵抗を抑えることができるスライド機構を構成するとよい。第1移動板411と第2移動板421とは、それぞれ、裏面側に図示しない摺動部を備え、この摺動部がスライド機構43を摺動することで、左右方向に案内される。第1移動板411は、第1駆動部412の駆動力を第1伝達機構413を介して得ることで、このスライド機構43を摺動する。また、第2移動板421は、第2駆動部422の動力を第2伝達機構423を介して得ることで、このスライド機構43を摺動する。
なお、本実施形態では、スライド機構43を、第1移動板411と第2移動板412とに共用のスライドレールとして説明したが、第1移動板411と第2移動板412とのそれぞれに独立したスライドレールを設けてもよい。
【0063】
移動機構用筐体44は、第1移動機構41、第2移動機構42に共用の筐体であり、例えば樹脂材料やアルミ等の非磁性金属から形成される。
【0064】
ここで、移動機構40の第1移動機構41と第2移動機構42、それぞれの可動範囲について、図6(a)〜(c)を参照して説明する。
【0065】
第1移動機構41は、例えば、ディスプレイ装置10の表示領域内で第1部分31を左右方向に移動させる。本実施形態では、第1部分31の停止位置は、表示領域の左端部、中央部、右端部の3つであり、これらの停止位置は、3つの第1検出ターゲット414bの配設位置によって規定される。第1移動機構41の可動範囲は、第1部分31が、表示領域の左端部から右端部まで移動する範囲であり、例えば、第1部分31の左端を基準にすれば、図6(a)に示すようになる。
【0066】
第2移動機構42は、例えば、ディスプレイ装置10の表示領域内で第2部分32を左右方向に移動させる。本実施形態では、第2部分32の停止位置は、表示領域の左端部、中央部、右端部の3つであり、これらの停止位置は、3つの第2検出ターゲット424bの配設位置によって規定されている。第2移動機構42の可動範囲は、第2部分32が、表示領域の左端部から右端部まで移動する範囲であり、例えば、第2部分32の右端を基準にすれば、図6(b)に示すようになる。
【0067】
本実施形態に係る表示装置100では、第1移動機構413、第2移動機構423、第1検出ユニット414、第2検出ユニット424を調節することにより、第1移動機構413と第2移動機構423とは、両者の可動範囲が一部重なる(図6(c)参照)ように構成されている。このように第1部分31と第2部分32の可動範囲を一部重なるように構成することにより、両者の可動範囲を広くとることができるため、装飾ユニット30の状態を、後述する第1〜第3パターンのように、様々な状態に変化することができる。また、装飾ユニットの形態の変化に合わせて、ディスプレイ装置10の表示画像を変化させることで、多様な表示形態での表示が可能である。
【0068】
回路基板50は、板状の基材に後述の制御部70を実装した回路基板であり、移動機構40の裏側に位置する。回路基板50は、ケース体60の内面に支持される。
【0069】
ケース体60は、上記各部(ディスプレイ装置10、指針式計器20、装飾ユニット30、移動機構40、回路基板50)を収納する筐体であり、収納体61と、透明カバー62と、から構成される。収納体61は、表側開口の箱状部材であり、その開口部に透明カバー62が取り付けられる。
【0070】
次に、図9を参照して、表示装置100の電気的構成について説明する。表示装置100は、制御部70と、車両情報入力ポート81と、センサ情報入力ポート82と、前述したディスプレイ装置10、指針駆動部21、光源25、第1駆動部413及び第2駆動部423と、を備える。
【0071】
制御部70は、マイコン71と、グラフィックディスプレイコントローラー(GDC)72と、指針駆動部21、第1駆動部412、第2駆動部422、ディスプレイ装置10のバックライト等を駆動する各種ドライバIC(図示せず)と、を備える。制御部70は、例えば、車速、エンジン回転数、エンジン温度、残燃料の量等の各種計測量を算出し、ディスプレイ装置10、指針式計器20の動作を制御し、算出した計測量を表示させる。
【0072】
マイコン71は、CPU、ROM、RAM、入出力インターフェイス等を備え、車両情報入力ポート81及びセンサ情報入力ポート82から入力された各種情報を受け付け、各部に制御信号を供給する。マイコン71のCPUは、例えば、ROM内に予め記憶された、後述する表示形態変形処理を実行するための所定プログラムを読み出し実行する。GDC72は、マイコン71と協働して、ディスプレイ装置10の表示を制御する。
【0073】
車両情報入力ポート81は、i)車両ECUから通信ラインにより伝送される各種状態情報、ii)バックカメラから送信されるバックモニタ画像情報、iii)ユーザが、ハンドル周辺の操作スイッチ、インパネ周辺の各種コントロールスイッチ、表示装置100に配設された入力スイッチ等を操作した際の操作内容を示す操作信号、等の車両情報が入力されるポートである。
【0074】
センサ情報入力ポート82は、第1検出部414a及び第2検出部424aからの検出信号が入力されるポートである。この検出信号は、i)第1検出部414aが第1検出ターゲット414bを検出した際の検出信号(つまり、装飾ユニット30の第1部分31が所定の位置にあることを示す信号)と、ii)第2検出部424aが第2検出ターゲット424bを検出した際の検出信号(つまり、装飾ユニット30の第2部分32が所定の位置にあることを示す信号)である。
【0075】
以上の構成からなる表示装置100は、制御部70の制御の下、所定の情報をトリガとして、装飾ユニット30の第1部分31(及び指針式計器20)と第2部分32とを各々スライド移動させ、装飾ユニット30を複数の状態に変形させるとともに、その状態に対応させてディスプレイ装置10の表示を変化させる。
表示装置100は、制御部70により移動機構40を駆動制御して、装飾ユニット30を、例えば図5に示すように、第1部材31と第2部材32とがディスプレイ装置10の表示領域の中央部で、リング形状を表現する「第1パターン」の状態と、第1部材31が表示領域の左端部に位置し、且つ、第2部材32が表示領域の右端部に位置する「第2パターン」の状態と、に変形させる。なお、状態に対応させたディスプレイ装置10の表示変化については、後に詳述する。このような、表示装置100の動作は、制御部70のCPUが実行する表示形態変形処理によって実現される。以下、図8等を参照してこの処理を説明する。
【0076】
(表示形態変形処理)
表示形態変形処理は、車両情報入力ポート81を介し、送信されてきた所定の信号を、制御部70が受け付けたことを条件に開始される。開始トリガとしての所定の信号は、例えば表示装置100が搭載されている車両のドアがオープンされたことを示す信号である。
【0077】
表示形態変形処理を開始すると、まず、制御部70は、前回の表示形態変形処理終了時に「第1パターン」の状態(図5(a)参照)になっていた装飾ユニット30の第1部分31(及び指針式計器20)を左端に、第2部分32を右端に移動させる(つまり、装飾ユニット30を「第2パターン」の状態(図5(b)参照)にする)イニシャライズ動作を実行する(ステップS1)。
具体的には、制御部70は、第1駆動部412を駆動制御し、第1移動板411を左方向にスライド移動させる。そして、制御部70は、第1検出ユニット414と協働して、第1移動板411が左端部に位置したことを検出すると(つまり、第1検出部414aが3つの第1検出ターゲット414bのうち左端部に位置する第1検出ターゲット414bと対向する位置に位置することで、第1検出部414aから供給される検出信号を受け付けると)、第1駆動部412の回転動作を停止させ、停止位置(検出位置)を今回動作の第1移動板411の原点(基準位置)とする。それと同時に、制御部70は、第2駆動部422を駆動制御し、第2移動板421を右方向にスライド移動させる。そして、制御部70は、第2検出ユニット424と協働して、第2移動板421が右端部に位置したことを検出すると(つまり、第2検出部424aが3つの第2検出ターゲット424bのうち右端部に位置する第2検出ターゲット424bと対向する位置に位置することで、第2検出部424bから供給される検出信号を受け付けると)、第2駆動部422の回転動作を停止させ、停止位置(検出位置)を今回動作の第2移動板421の原点(基準位置)とする。制御部70は、ステップS1において、このようなイニシャライズ動作を実行する。
【0078】
続いて、制御部70は、装飾ユニット30を「第1パターン」の状態にする初期動作を実行する(ステップS2)。
具体的には、制御部70は、第1駆動部412を駆動制御し、第1移動板411を右方向にスライド移動させる。そして、制御部70は、第1検出ユニット414と協働して、第1移動板411が中央部に位置したことを検出すると(つまり、第1検出部414aが3つの第1検出ターゲット414bのうち中央部に位置する第1検出ターゲット414bと対向する位置に位置することで、第1検出部414aから供給される検出信号を受け付けると)、第1駆動部412の回転動作を停止させる。それと同時に、制御部70は、第2駆動部422を駆動制御し、第2移動板421を左方向にスライド移動させる。そして、制御部70は、第2検出ユニット424と協働して、第2移動板421が中央部に位置したことを検出すると(つまり、第2検出部424aが3つの第2検出ターゲット424bのうち中央部に位置する第2検出ターゲット424bと対向する位置に位置することで、第2検出部424bから供給される検出信号を受け付けると)、第2駆動部422の回転動作を停止させる。制御部70は、このようにして、装飾ユニット30を「第1パターン」の状態にする初期動作を実行する。
【0079】
なお、第1パターンの状態では、第1部分31と第2部分32とは当接せずに、近接する。これにより、図3(c)に示すように、第1部分31と第2部分32との間には隙間部Gが形成される。隙間部Gは、移動機構40の移動精度誤差や、移動してきた第1移動板411及び第2移動板421が停止した際の反動で微動することによって、第1部分31と第2部分32とが当接しないように設けられる。第1検出ユニット414、第2検出ユニット424等を適宜調整することにより、このような隙間部Gが形成されるように表示装置100は構成される。また、本実施形態では、上記のように、第1部分31に隙間部Gを、表示装置100を表側から見た(正視した)場合に、覆い隠すリブr1が形成されており、これによって、近接時に間欠(隙間)のないリング形状を表現している。
【0080】
続いて、制御部70は、イグニッションがオンされたか否かを判別する(ステップS3)。制御部70は、車両情報入力ポート81を介して、イグニッションがオンされたことを示す信号を受け付けた場合に、イグニッションがオンされたと判別し(ステップS3;Yes)、ステップS4に処理を進める。一方、イグニッションがオンされていないと判別した場合(ステップS3;No)、ステップS3の処理を再度実行する。この場合、イグニッション・オンを示す信号を受け付けるまで、制御部70は待機することになる。
【0081】
ステップS4で、制御部70は、オープニング動作を実行する。オープニング動作は、例えば、ディスプレイ装置10に所定のオープニング画像を表示したり、指針式計器20の指針ユニット24をスイープさせたり、光源25やディスプレイ装置10のバックライトを点灯または点滅させたりする動作である。
【0082】
続いて、制御部70は、ギアがリバースギアであるか否かを判別する(ステップS5)。具体的には、制御部70は、車両情報入力ポート81を介し、ギアがリバースギアにシフトされたことを示す信号を受け付けるとリバースギアであると判別し(ステップS5;Yes)、ステップS8の処理を実行する。制御部70は、リバースギアでないと判別した場合(ステップS5;No)、ステップS6の処理を実行する。
【0083】
ステップS6で、制御部70は、第1駆動部412及び第2駆動部422を制御し、装飾ユニット30を「第1パターン」の状態にする。具体的な、制御方法については、ステップS2と同様である。なお、現在、既に、装飾ユニット30が「第1パターン」の状態にあるときは、制御部70は、その状態を維持する。
続いて、制御部70のマイコン71は、GDC72と協働して、ディスプレイ装置10の表示を走行時画面表示にする(ステップS7)。走行時画面表示とは、例えば、図7(a)に示すような走行時画面91の下、車両情報入力ポート81を介し、送信されてきた車両情報に応じて、ディスプレイ装置10及び指針式計器20に各種計測量を表示させる表示である。より具体的には、走行時画面表示において、ディスプレイ装置10は、その表示領域に、走行時画面91として、エンジン回転数を表示するタコメータTm、燃料の残量を表示する燃料計Fm、バッテリー残量を示すバッテリー計Bm、走行モードを表示するモード表示Md、速度計用の指標部In等を表示する。速度計用の指標部Inは、図示するように、表示領域の中央部に位置する装飾ユニット30(「第1パターン」の状態)のリング形状の内部に表示される数値、目盛り、図形等であり、このような指標部Inと指針式計器20と第1パターンの状態にある装飾ユニット30とで、車速計Smが表現される。この場合、車速計Sm以外の計器は、ディスプレイ装置10に表示されたデジタル表示されるものであるが、車速計Smは、アナログの指針式計器20(及び装飾ユニット30)とディスプレイ装置10にデジタル表示された指標部Inとによって表現される。つまり、装飾ユニット30は、車速計Smの枠として機能し、この枠に沿うように(装飾ユニット30の形状に合わせて)、ディスプレイ装置10は、数値、目盛り等を車速を報知するための報知画像として表示する。なお、現在、既に、走行時画面表示の状態にあるときは、制御部70は、その状態を維持する。
制御部70は、ステップS6、S7の処理を実行すると、処理をステップS10に進める。
【0084】
ステップS5で、ギアがリバースギアであると判別した場合(ステップS5;Yes)、制御部70は、第1駆動部412及び第2駆動部422を制御し、装飾ユニット30を「第2パターン」の状態にする(ステップS8)。具体的な、制御方法については、ステップS1と同様である。なお、現在、既に、装飾ユニット30が「第2パターン」の状態にあるときは、制御部70は、その状態を維持する。
続いて、制御部70のマイコン71は、GDC72と協働して、ディスプレイ装置10の表示をバックモニタ表示にする(ステップS9)。バックモニタ表示とは、例えば、図8(b)に示すようなバックモニタ用画面92の下、車両情報入力ポート81を介し、送信されてきた車両情報に応じて、ディスプレイ装置10及び指針式計器20に各種計測量を表示させる表示である。より具体的には、バックモニタ表示において、ディスプレイ装置10は、その表示領域に、バックモニタ用画面92として、i)表示領域の左端部に位置する装飾ユニット30の第1部分31の内部に、その半円弧形状に合わせて速度計用の数値、目盛り、図形等からなる指標部Inを表示し、ii)表示領域の右端部に位置する第2部分32の内部に、その半円弧形状に合わせてワーニング表示Wa1、Wa2を表示し、iii)左右に開いた第1部分31と第2部分32の間に出現する矩形状の領域にバックモニタBmを表示する。
バックモニタBmには、車両後部に搭載され、外部を撮影するバックカメラ(図示せず)の撮影画像が映し出される。ワーニング表示Wa1,Wa2は、例えば、車両の後退時に障害物が近接した場合の警告表示、現在、後退時であることを運転者に知らせる警告表示等である。また、指標部Inと指針式計器20と第2パターンの状態にある装飾ユニット30の第1部分31とで、車速計Smが表現される。この場合は、第1部分31が、車速計Smの枠として機能し、この枠に沿うように(第1部分31の形状に合わせて)、ディスプレイ装置10は、数値、目盛り等を車速を報知するための報知画像として表示する。また、第2部分32が、ワーニング表示Wa1,Wa2を表示する計器の枠として機能し、この枠の形状に合わせて、ディスプレイ装置10は、警告情報を知らせるための報知画像をワーニング表示Wa1,Wa2として表示する。なお、現在、既に、バックモニタ表示の状態にあるときは、制御部70は、その状態を維持する。
制御部70は、ステップS8、S9の処理を実行すると、処理をステップS10に進める。
【0085】
ステップS10で、制御部70は、イグニッションがオフされたか否かを判別する。制御部70は、車両情報入力ポート81を介して、イグニッションがオフされたことを示す信号を受け付けた場合に、イグニッションがオフされたと判別し(ステップS10;Yes)、ステップS11に処理を進める。一方、イグニッションがオフされていないと判別した場合(ステップS10;No)、処理をステップS5に戻す。
【0086】
ステップS11で、制御部70は、装飾ユニット30を「第1パターン」の状態にする終了動作を実行する。具体的な、制御方法については、ステップS2と同様である。なお、現在、既に、装飾ユニット30が「第1パターン」の状態にあるときは、制御部70は、その状態を維持する。
ステップS11の処理を実行すると制御部70は、表示形態変形処理を終了する。
【0087】
以上のように本実施形態では、表示領域に所定の画像を表示するディスプレイ装置10と、このディスプレイ装置10の前方側に配置される可動部材30と、この可動部材30を移動させる移動機構40とを有し、移動機構40が、駆動力を発生する駆動装置としての第1駆動部412と、駆動力を可動部材30に伝達するための動力伝達機構としての第1伝達機構413とを備えてなる表示装置100において、第1伝達機構413は、駆動力の発生に伴い回動する第1駆動部412の第1回動軸412aと第1伝達機構413に設けられる第1軸部X1とを連結する第1連結部材413dを備え、この第1連結部材413dには弾性体Y3が含まれているものである。
【0088】
従って、第1駆動部412の駆動時に生じる第1回動軸412aの軸ぶれ(振動)は第1連結部材413dに備えられる弾性体Y3によって吸収(減衰)されるため、第1軸部X1、プ−リー413a、413b、タイミングベルト413c並びに第1移動板411の各部材を介して第1連結部材413dと連結されている装飾ユニット30の第1部分31のぶれが極力抑制され、商品性を向上させることができる。さらに、第1部分31上に指針式計器20の指針ユニット24が載置されている構成にあっては、指針ユニット24の導光指針24bのぶれも抑制されるため、指針の動作に悪影響を与える虞がなくなり、商品性の高い表示装置を提供することができる。
【0089】
また本実施形態では、表示領域に所定の画像を表示するディスプレイ装置10と、このディスプレイ装置10の前方側に配置される可動部材30と、この可動部材30を移動させる移動機構40とを有し、移動機構40が、駆動力を発生する駆動装置としての第2駆動部422と、駆動力を可動部材30に伝達するための動力伝達機構としての第2伝達機構423とを備えてなる表示装置100において、第2伝達機構423は、駆動力の発生に伴い回動する第2駆動部422の第2回動軸422aと第2伝達機構423に設けられる第2軸部X2とを連結する第2連結部材423dを備え、この第2連結部材413dには弾性体Z3が少なくとも含まれているものである。
【0090】
従って、第2駆動部422の駆動時に生じる第2回動軸422aの軸ぶれ(振動)は第2連結部材423dに備えられる弾性体Z3によって吸収(減衰)されるため、第2軸部X2、プ−リー423a、423b、タイミングベルト423c並びに第2移動板421の各部材を介して第2連結部材423dと連結されている装飾ユニット30の第2部分32のぶれが極力抑制される。このように各軸部X1、X2の軸ぶれに伴う装飾ユニット30、指針ユニット24のぶれが極力抑制されるので、商品性の向上した表示装置を提供することができる。
【0091】
また本実施形態では、表示装置100が実体の指針式計器20を備える例を示したが、これに限られない。表示装置は、実体指針を備えず、ディスプレイ装置10に指針を表示させたり、数値(計測値)を表示させたりしてもよい。
【0092】
なお、本実施形態では、表示装置が車両に搭載される車両用計器である例を示したが、これに限られない。表示装置は、水上バイク、耕作機械、航空機、船舶、電車等に搭載される計器であってもよい。
【符号の説明】
【0093】
100 表示装置
10 ディスプレイ装置(表示手段)
20 指針式計器
24 指針ユニット
30 装飾ユニット(可動部材)
31 第1部分
32 第2部分
40 移動機構
41 第1移動機構
411 第1移動板
412 第1駆動部(駆動装置)
412a 第1回動軸(回動軸)
413 第1伝達機構(動力伝達機構)
413d 第1連結部材(連結部材)
414 第1検出ユニット
415 第1連結部材(連結部材)
42 第2移動機構
421 第2移動板
422 第2駆動部(駆動装置)
422a 第2回動軸(回動軸)
423 第2伝達機構(動力伝達機構)
423d 第2連結部材(連結部材)
424 第2検出ユニット
43 スライド機構
44 移動機構用筐体
X1 第1軸部(軸部)
X2 第2軸部(軸部)
Y3、Z3 弾性体
【特許請求の範囲】
【請求項1】
表示領域に所定の画像を表示する表示手段と、
前記表示手段の前方側に配置される可動部材と、
前記可動部材を移動させる移動機構とを有し、
前記移動機構が、駆動力を発生する駆動装置と、前記駆動力を前記可動部材に伝達するための動力伝達機構とを備えてなる表示装置において、
前記動力伝達機構は、前記駆動力の発生に伴い回動する前記駆動装置の回動軸と前記動力伝達機構に設けられる軸部とを連結する連結部材を備え、
前記連結部材には弾性体が含まれていることを特徴とする表示装置。
【請求項1】
表示領域に所定の画像を表示する表示手段と、
前記表示手段の前方側に配置される可動部材と、
前記可動部材を移動させる移動機構とを有し、
前記移動機構が、駆動力を発生する駆動装置と、前記駆動力を前記可動部材に伝達するための動力伝達機構とを備えてなる表示装置において、
前記動力伝達機構は、前記駆動力の発生に伴い回動する前記駆動装置の回動軸と前記動力伝達機構に設けられる軸部とを連結する連結部材を備え、
前記連結部材には弾性体が含まれていることを特徴とする表示装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【公開番号】特開2013−107478(P2013−107478A)
【公開日】平成25年6月6日(2013.6.6)
【国際特許分類】
【出願番号】特願2011−253464(P2011−253464)
【出願日】平成23年11月21日(2011.11.21)
【出願人】(000231512)日本精機株式会社 (1,561)
【Fターム(参考)】
【公開日】平成25年6月6日(2013.6.6)
【国際特許分類】
【出願日】平成23年11月21日(2011.11.21)
【出願人】(000231512)日本精機株式会社 (1,561)
【Fターム(参考)】
[ Back to top ]