
表面実装型部品の取り外し方法、表面実装型部品取り外し装置及び半導体パッケージの製造方法
【課題】 表面実装型部品の取り外し方法、表面実装型部品取り外し装置及び半導体パッケージの製造方法に関し、はんだ溶融時を正確に検知して過剰加熱を防止する。
【解決手段】 基板上にはんだ固定された表面実装型部品をハンド機構に設けた把持ハンドにより把持する工程と、前記ハンド機構に前記基板の表面に沿った方向に一定の与圧を加える工程と、前記表面実装型部品を加熱して前記はんだを溶融する工程と、前記はんだの溶融時に前記表面実装型部品の横ずれによる前記予圧の変動を検知する工程と、前記予圧の変動が予め定めた値より大きくなった時に、前記把持ハンドを上方退避させて前記表面実装型部品を前記基板から分離する工程とを設ける。
【解決手段】 基板上にはんだ固定された表面実装型部品をハンド機構に設けた把持ハンドにより把持する工程と、前記ハンド機構に前記基板の表面に沿った方向に一定の与圧を加える工程と、前記表面実装型部品を加熱して前記はんだを溶融する工程と、前記はんだの溶融時に前記表面実装型部品の横ずれによる前記予圧の変動を検知する工程と、前記予圧の変動が予め定めた値より大きくなった時に、前記把持ハンドを上方退避させて前記表面実装型部品を前記基板から分離する工程とを設ける。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、表面実装型部品(BGA:Ball Grid Array、CSP:Chip Scale Package)のリワーク時における表面実装型部品の取り外し方法、表面実装型部品取り外し装置及び半導体パッケージの製造方法に関するものである。
【背景技術】
【0002】
携帯電話やパーソナルコンピュータなどの基板には、高密度化されたBGA(BallGrid Array)型或いはCSP(ChipScale Package)型の半導体部品が用いられている。
【0003】
これらの表面実装型部品は、基板にクリームハンダで位置決めされ仮固定の状態で、温風リフローなどの手段で、裏面に配したハンダボールを溶融して基板へ実装している。この際に、初期の位置ずれなどの要因で、隣接間ショートなど電気的な不具合が生じるケースがある。そのため、不具合のある表面実装型部品を一旦基板から取り外して、再度基板に実装する修正(リワーク)工程が必要になる。
【0004】
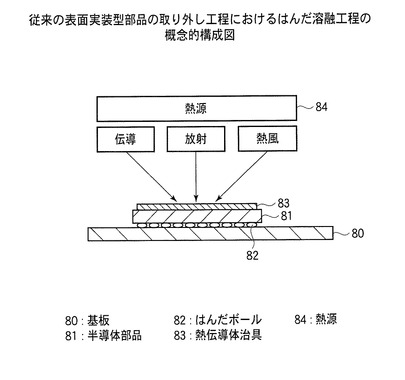
図12は、従来の表面実装型部品の取り外し工程におけるはんだ溶融工程の概念的構成図である。図に示すように、基板80にはんだボール82により実装したBGA型或いはCSP型等の表面実装型の半導体部品81の背面に熱伝導体治具83を接触させ、その上方に熱源84を配置する。この場合の熱源84としては、伝導熱でも、放射熱でも或いは熱風でも良く、その熱源84の熱によりはんだボール82を溶融させて半導体部品81を基板80から取り外す。
【0005】
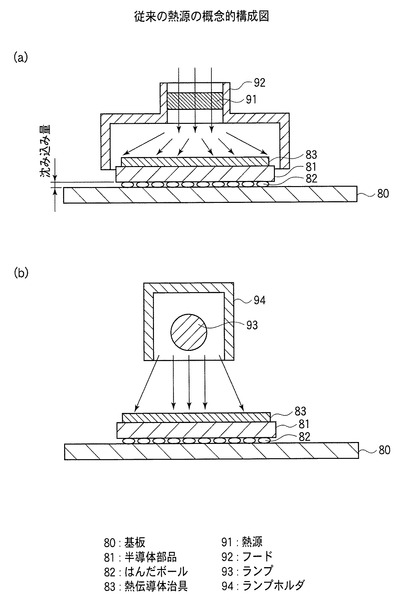
図13は従来の熱源の概念的構成図であり、図13(a)は熱風方式の溶融装置であり、図13(b)は赤外線加熱方式の溶融装置である。熱風方式の溶融装置の場合には、図13(a)に示すように、抵抗加熱体等の熱源91をフード92により覆い、空気を熱源91に吹き付けて、加熱され熱風を半導体部品81に吹き付けてはんだボール82を溶融している。
【0006】
一方、赤外線加熱方式の溶融装置の場合には、図13(b)に示すように、ハロゲンランプ等のランプ93を反射体を兼ねるランプホルダ94内に収容して、赤外線を半導体部品81に照射してはんだボール82を溶融している。
【0007】
これらの工程においては、修正(リワーク)対象の半導体部品81の加熱温度を管理し、はんだの融点以上の温度となった時点で溶融と判断し修正を開始する。なお加熱効率を高めるため、基板80の裏面からも予備加熱を行うこともある。
【0008】
また、はんだボールの溶融時における半導体部品81の沈み込みによる変位を検出して溶融判定を行う手法もある。
【先行技術文献】
【特許文献】
【0009】
【特許文献1】特開2010−161123号公報
【特許文献2】特開平10−303546号公報
【特許文献3】特開平04−258195号公報
【発明の概要】
【発明が解決しようとする課題】
【0010】
リワーク工程においては、リワーク対象部品のみを正確に加熱できれば問題ないが、熱風・赤外線加熱は、近傍の弱熱チップ部品にも加熱時の影響を与え、接触不具・破壊など電気的な影響が生じる虞がある。
【0011】
また、溶融検知方式においては、加熱時間管理あるいは溶融時の部品沈み込みを検知して行うため、特に、CSPチップでは狭小ピッチ化された部品であるため、沈み込み量が極めて小さくなり、検知感度低下によって、過剰加熱が避けられないという問題がある。
【0012】
したがって、本発明は、はんだ溶融時を正確に検知して過剰加熱を防止することを目的とする。
【課題を解決するための手段】
【0013】
開示する一観点からは、基板上にはんだ固定された表面実装型部品をハンド機構に設けた把持ハンドにより把持する工程と、前記ハンド機構に前記基板の表面に沿った方向に一定の与圧を加える工程と、前記表面実装型部品を加熱して前記はんだを溶融する工程と、前記はんだの溶融時に前記表面実装型部品の横ずれによる前記予圧の変動を検知する工程と、前記予圧の変動が予め定めた値より大きくなった時に、前記把持ハンドを上方退避させて前記表面実装型部品を前記基板から分離する工程とを有することを特徴とする表面実装型部品の取り外し方法が提供される。
【0014】
また、開示する別の観点からは、基板上にはんだ固定された表面実装型部品を把持する把持ハンドを備えたハンド機構と、前記ハンド機構に前記基板の表面に沿った方向に与圧を加える予圧手段と、前記ハンド機構に設けられ、前記予圧手段から前記表面実装型部品に印加される予圧による横ずれに起因する変動を検知する予圧力検知機構と、前記ハンド機構を昇降する昇降機構と、前記表面実装型部品のはんだを加熱溶融する加熱手段とを備えたことを特徴とする表面実装型部品取り外し装置が提供される。
【0015】
また、さらに開示する別の観点からは、基板上にはんだ固定された表面実装型部品をハンド機構に設けた把持ハンドにより把持し、前記ハンド機構に前記基板の表面に沿った方向に一定の与圧を加え、前記表面実装型部品を加熱して前記はんだを溶融し、前記はんだの溶融時に前記表面実装型部品の横ずれによる前記予圧の変動を検知し、前記予圧の変動が予め定めた値より大きくなった時に、前記把持ハンドを上方退避させて前記表面実装型部品を前記基板から分離することを特徴とする半導体パッケージの製造方法が提供される。
【発明の効果】
【0016】
開示の表面実装型部品の取り外し方法、表面実装型部品取り外し装置及び半導体パッケージの製造方法によれば、はんだ溶融時を正確に検知して過剰加熱を防止することが可能になる。
【図面の簡単な説明】
【0017】
【図1】本発明の実施の形態における把持ハンド解放状態の説明図である。
【図2】本発明の実施の形態における把持ハンド部品支持状態の説明図である。
【図3】本発明の実施例1における把持ハンド解放状態の説明図である。
【図4】本発明の実施例1における把持ハンド部品支持状態の説明図である。
【図5】本発明の実施例1における予圧印加状態の説明図である。
【図6】本発明の実施例1におけるはんだ加熱溶融状態の説明図である。
【図7】本発明の実施例1におけるはんだ溶融横滑り現象後の説明図である。
【図8】本発明の実施例1における半導体チップ取り外し工程の説明図である。
【図9】本発明の実施例1の動作フロー図である。
【図10】本発明の実施例1の動作フローにおける和合成出力及び差合成出力の説明図である。
【図11】本発明の実施例2の表面実装部品の取り外し装置の概念的構成図である。
【図12】従来の表面実装型部品の取り外し工程におけるはんだ溶融工程の概念的構成図である。
【図13】従来の熱源の概念的構成図である。
【発明を実施するための形態】
【0018】
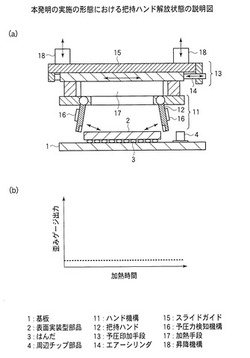
ここで、図1及び図2を参照して、本発明の実施の形態の表面実装型部品の取り外し方法を説明する。図1は、把持ハンド解放状態の説明図であり、図1(a)に示すように、表面実装型部品の取り外し装置は、把持ハンド12を備えたハンド機構11、予圧印加手段13、予圧力検知機構16、加熱手段17、昇降機構18を備えている。
【0019】
ハンド機構11は、回転チャック機構或いは並進チャック機構により、基板1にはんだボール等のはんだ3によって溶融固定された表面実装型部品2を把持する。また、把持ハンド12は熱遮蔽機能或いは断熱機能を有する部材で構成することが望ましい。なお、図における符号4は周辺チップ部品である。
【0020】
予圧印加手段13は、横方向、即ち、基板の主面方向に沿って予圧を印加できる機構であれば何でも良いが、例えば、スライドガイド15を備えたプッシュプル型のエアーシリンダ14を用いる。また、予圧力検知機構16としては、はんだ溶融完了直後の検知感度を高めるために典型的には歪ゲージを用い、一つの把持ハンド12の外側に接着して予圧を検知する。
【0021】
加熱手段17は、熱風、ハロゲンランプ等の赤外線ランプまたはヒーターのいずれか、或いは、それら内の少なくとも2つを組み合わせたものを用いる。また、昇降機構18は、半導体製造装置に用いられている一般的な昇降機構を用いれば良い。
【0022】
なお、加熱効率を高めるために、対向する把持ハンド12で形成される一対の辺とは別の一対の辺(紙面に平行方向の面)に、熱遮蔽または断熱機能を持った遮蔽板を配して、4方を閉鎖構造化して熱の周囲拡散を防止することが望ましい。
【0023】
図1(b)は予圧力検知機構の検知出力の説明図であり、図1(a)に示すように把持ハンドが解放状態の場合には、出力は検出されない。
【0024】
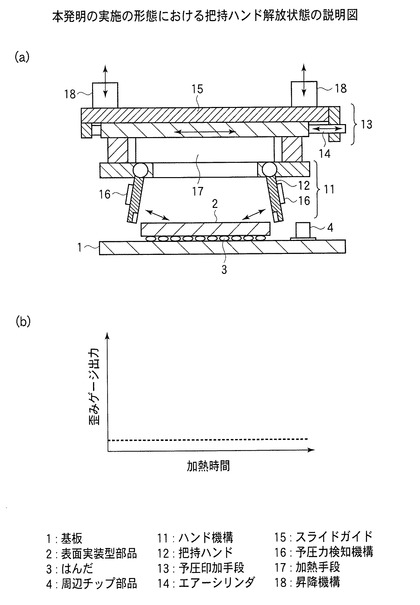
図2は、把持ハンド部品支持状態の説明図であり、ハンド機構11を駆動して表面実装型部品2を把持ハンド12で把持し、予圧印加機構13により横方向の予圧を印加した状態で、加熱手段18により熱を印加してはんだ3を溶融する。
【0025】
図2(b)は予圧力検知機構の検知出力の説明図であり、把持ハンド12により把持した状態で予圧を印加すると、予圧力検知機構の検知出力は徐々に上昇して所定の予圧力で一定となる。この状態で加熱溶融を行うと、はんだ3が溶融を開始すると印加される予圧により横ずれが発生し、拘束力が徐々に開放されて予圧力検知機構の検知出力は徐々に低下し、最終的には出力は0になる。
【0026】
この場合、予め閾値を設定して、検出出力が閾値X以下になった時点で昇降機構19を駆動して、表面実装型部品2を基板1から取り外す。閾値Xとしては0でも良いし、0以外の値でも良く、表面実装型部品2にダメージを与えることなく確実に取り外しのできる値を実験的に定めれば良い。
【0027】
このように、本発明の実施の形態においては、表面実装型部品の沈み込みではなく、横方向の予圧を印加して横滑りの変位を検出しているので、狭小ピッチ化された表面実装型部品の場合にも、はんだ溶融時を正確に検知して過剰加熱を防止することが可能になる。
【実施例1】
【0028】
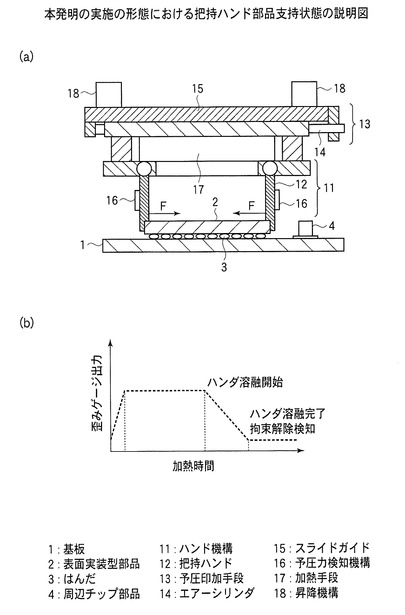
次に、図3乃至図10を参照して、本発明の実施例1の表面実装型部品の取り外し方法及び表面実装型部品取り外し装置を説明する。図3は、把持ハンド解放状態の説明図であり、図3(a)に示すように、表面実装型部品の取り外し装置は、把持ハンド321,322を備えた回転チャック機構を有するハンド機構31にスライダガイド35及びプッシュプル型エアーシリンダ34を備えた予圧印加手段33が固着されている。また、他方の面には、長さがdの弾性部材36が備えられており、初期位置への復帰機能を有している。
【0029】
一対の把持ハンド321,322の対向する外側面に歪ゲージ371,372が取り付けられており、この歪ゲージ371,372が予圧力検知機構を構成する。歪ゲージ371,372は、それぞれ把持ハンド321,322の外側の面に、引張りおよび圧縮方向に変位が有った場合に、その変位に応じて抵抗値が増減し、そのときの状態を電気信号として検知する。
【0030】
また、ハンド機構31と予圧印加機構33との間の空間にはハロゲンランプ38からなる加熱手段が配置されている。スライドガイド35には昇降機構39が接続されており、表面実装型の半導体チップ22を把持する場合には、下降させ、はんだボール23の溶融が完了した段階で上昇させる。
【0031】
なお、加熱効率を高めるために、対向する把持ハンド321,322で形成される一対の辺とは別の一対の辺(紙面に平行方向の面)に、熱遮蔽または断熱機能を持った遮蔽板(図示は省略)を配して、4方を閉鎖構造化している。
【0032】
図3(b)は歪ゲージの出力の説明図であり、歪ゲージ371及び歪ゲージ372は無負荷状態であるので、出力はともに0である。
【0033】
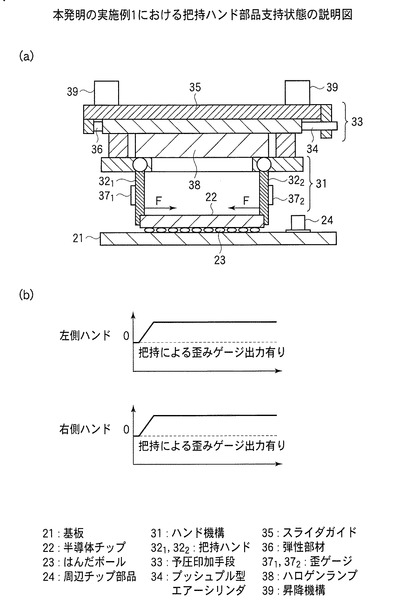
図4は、把持ハンド部品支持状態の説明図であり、図4(a)に示すように、ハンド機構31の回転チャック機構を駆動して半導体チップ22を押圧力Fで把持する。図4(b)は歪ゲージの出力の説明図であり、歪ゲージ371及び歪ゲージ372はともに押圧力Fによる歪a,bを検出している。この検出出力に基づいて、和合成出力(a+b)と差合成出力(a−b)を得る。なお、この段階ではa=bであるので、差合成出力(a−b)は0である。
【0034】
図5は、予圧印加状態の説明図であり、図5(a)に示すように、プッシュプル型エアーシリンダ34を駆動して予圧を印加する。この時、基板21に設けたランド(図示は省略)の再生を容易にするために、弾性部材36の長さd′が、(d−d′)の値がはんだボール23のピッチと等しい値になるように予圧Pを印加する。
【0035】
図5(b)は歪ゲージの出力の説明図であり、左側の把持ハンド321に取り付けられた歪ゲージ371からは予圧Pによる歪出力αが加算された値が出力される。一方、右側の把持ハンド322に取り付けられた歪ゲージ372からは予圧Pに基づく歪出力αが減算された値が出力される。その結果、和合成出力(a+b)は同じままで、差合成出力(a−b)は2αとなる。
【0036】
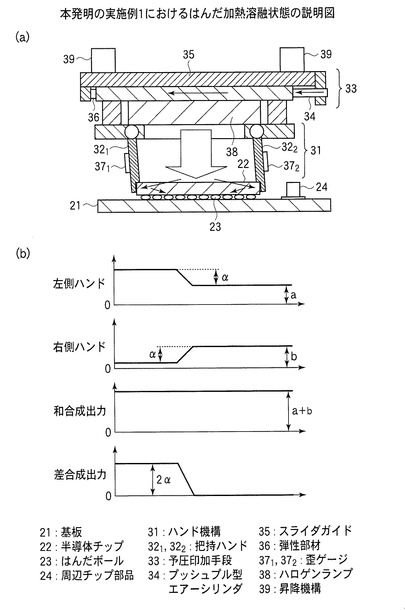
図6は、はんだ加熱溶融状態の説明図であり、図6(a)に示すように、ハンド機構31に予圧を印加した状態でハロゲンランプ38を点灯して半導体チップ22を加熱してはんだボール23を溶融する。
【0037】
図6(b)は、歪ゲージの出力の説明図であり、和合成出力(a+b)は一定であるが、差合成出力(a−b)は、はんだボール23の溶融が始まると徐々に低下し、完全に溶融した状態で0になるので、この時点で溶融完了と判断してハロゲンランプ38を消灯する。
【0038】
図7は、はんだ溶融横滑り現象後の説明図であり、はんだボール23の溶融により横滑り現象が生じて半導体チップ22がはんだボール23の1ピッチ分だけ横方向(図における左方向)にずれて、歪ゲージ371,372は押圧力Fによる変位しか出力しなくなる。
【0039】
図8は、半導体チップ取り外し工程の説明図であり、昇降機構39を駆動して半導体チップ22をハンド機構31とともに上方に退避させて、半導体チップ22を基板21から取り外す。以降は、基板21のパッド(ランド)上の残留ハンダを、別途クリーニング機能によって掃除することによって、基板21を再度実装可能な状態に復帰させる。
【0040】
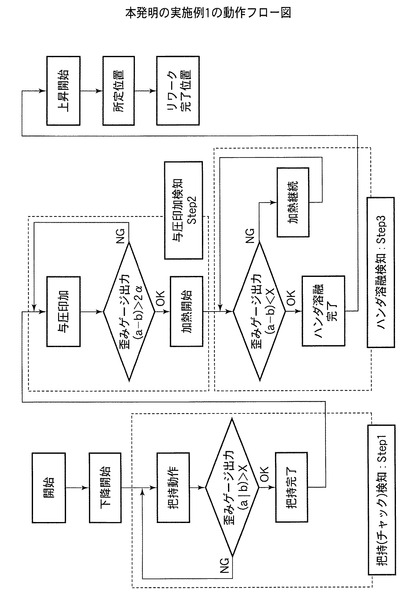
図9は、以上の工程を纏めた本発明の実施例1の動作フロー図であり、まず、把持検知ステップとして、
A.リワーク対象の半導体チップ22上で、加熱系を含めたハンド機構31を所定位置まで下降させる。次いで、
B.把持ハンド32を動作させて半導体チップ22に接触後、歪みゲージ371,372の出力が所定の押圧力Fになる信号を得るまで信号をモニタしながら挟み込みを継続する。その結果、
C.所定の信号を得て把持検知が行われ把持の完了が判断される。
【0041】
次いで、予圧印加検知ステップとして、
D.与圧印加機構33により基板21の主面と同方向に与圧Pを加え、歪ゲージ371,372の出力が、所定の予圧に応じた歪量αを加算或いは減算した値を出力するまで予圧を印加する。
E.歪ゲージ371,372の出力が、歪量αを加算或いは減算した値を出力した時点でハロゲンランプ38を添加して加熱を開始する。
【0042】
次いで、はんだ溶融検知ステップとして、
F.歪ゲージ371,372の差合成出力(a−b)の絶対値が所定の値X以下、典型的には0になるまで加熱を継続する。
G.歪ゲージ371,372の差合成出力(a−b)の絶対値が所定の値以下になった時点ではんだ溶融完了と見做して、ハロゲンランプ38を消灯して、加熱を終了する。
【0043】
最後に、
H.昇降機構39を駆動して半導体チップ22を上方へ退避させ、
I.所定位置に達した時点でハンド機構31の回転チャック機構を作動させて把持状態から解放状態にして半導体チップ22を取り出すことで、本発明の実施例1の動作フローは完了することなる。
【0044】
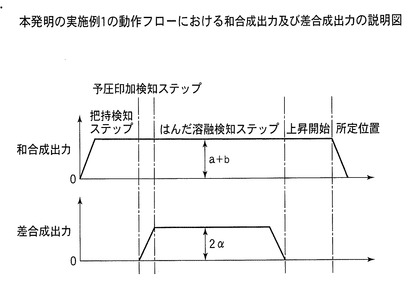
図10は、本発明の実施例1の動作フローにおける和合成出力及び差合成出力の説明図であり、和合成出力(a+b)は把持ハンド321,322による把持が行われた時点からは一定の値に維持される。一方、差合成出力(a−b)は予圧が所定の値まで印加された状態で2αとなり、はんだ溶融が始まると急減に低下し、はんだが完全に溶融した時点で0になる。
【0045】
このように、本発明の実施例1においては、従来の垂直方向の与圧方式とは異なり横方向の予圧印加方式を採用しているので、はんだボールが狭ピッチ化した半導体チップの場合にも、はんだ溶融時点を正確に検知することができる。それによって、過剰加熱が回避されるので、周辺チップ部品24に対する熱的影響を軽減することができる。
【実施例2】
【0046】
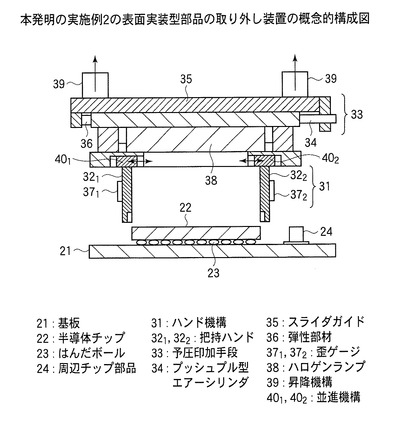
次に、図11を参照して、本発明の実施例2の表面実装部品取り外し装置を説明する。図11は本発明の実施例2の表面実装部品の取り外し装置の概念的構成図であり、図3に示した本発明の実施例1の表面実装部品の取り外し装置におけるチャック機構を回転チャック機構から並進チャック機構に変更したものであり、その他の構成は同等である。
【0047】
図11に示すように、ハンド機構31には把持ハンド321,322に固定された並進機構401,402を備えており、この並進機構401,402を水平方向に移動させることによって、半導体チップ22を把持する。
【0048】
この本発明の実施例2においても、従来の垂直方向の与圧方式とは異なり横方向の予圧印加方式を採用しているので、はんだボールが狭ピッチ化した半導体チップの場合にも、はんだ溶融時点を正確に検知することができる。それによって、過剰加熱が回避されるので、周辺チップ部品24に対する熱的影響を軽減することができる。
【0049】
ここで、実施例1及び実施例2を含む本発明の実施の形態に関して、以下の付記を付す。
(付記1)基板上にはんだで固定された表面実装型部品をハンド機構に設けた把持ハンドにより把持する工程と、前記ハンド機構に前記基板の表面に沿った方向に一定の与圧を加える工程と、前記表面実装型部品を加熱して前記はんだを溶融する工程と、前記はんだの溶融時に前記表面実装型部品の横ずれによる前記予圧の変動を検知する工程と、前記予圧の変動が予め定めた値より大きくなった時に、前記把持ハンドを上方退避させて前記表面実装型部品を前記基板から分離する工程とを有することを特徴とする表面実装型部品の取り外し方法。
(付記2)前記予め定めた値が、前記はんだのピッチが、前記予圧の印加方向における滑り量と等しくなる時の値であることを特徴とする付記2に記載の表面実装型部品の取り外し方法。
(付記3)基板上にはんだ固定された表面実装型部品を把持する把持ハンドを備えたハンド機構と、前記ハンド機構に前記基板の表面に沿った方向に与圧を加える予圧印加手段と、前記ハンド機構に設けられ、前記予圧印加手段から前記表面実装型部品に印加される予圧による横ずれに起因する変動を検知する予圧力検知機構と、前記ハンド機構を昇降する昇降機構と、前記表面実装型部品のはんだを加熱溶融する加熱手段と、を備えたことを特徴とする表面実装型部品取り外し装置。
(付記4)前記予圧検知機構が、前記把持ハンドに固着されたひずみゲージであることを特徴とする付記3に記載の表面実装型部品取り外し装置。
(付記5)前記ハンド機構が、熱遮蔽機能或いは断熱機能を有するとともに、前記表面実装型部品の前記把持ハンドにより把持される一対の面と異なる一対の面に沿って、熱遮蔽機能或いは断熱機能を有する遮蔽板を有することを特徴とする付記3または付記4に記載の表面実装型部品取り外し装置。
(付記6)前記ハンド機構が、前記基板を把持するための回転機構或いは並進機構のいずれかからなる開閉機構を備えていることを特徴とする付記3乃至付記5のいずれか1に記載の表面実装型部品取り外し装置。
(付記7)前記加熱手段が、熱風、赤外線ランプまたはヒーターのいずれか、或いは、それらの内の少なくとも2つを組み合わせ加熱手段からなる付記1乃至付記3のいずれか1に記載の表面実装型部品取り外し装置。
(付記8)基板上にはんだ固定された表面実装型部品をハンド機構に設けた把持ハンドにより把持し、前記ハンド機構に前記基板の表面に沿った方向に一定の与圧を加え、前記表面実装型部品を加熱して前記はんだを溶融し、前記はんだの溶融時に前記表面実装型部品の横ずれによる前記予圧の変動を検知し、前記予圧の変動が予め定めた値より大きくなった時に、前記把持ハンドを上方退避させて前記表面実装型部品を前記基板から分離することを特徴とする半導体パッケージの製造方法。
【符号の説明】
【0050】
1 基板
2 表面実装型部品
3 はんだ
4 周辺チップ部品
11 ハンド機構
12 把持ハンド
13 予圧印加手段
14 エアーシリンダ
15 スライドガイド
16 予圧力検知機構
17 加熱手段
18 昇降機構
21 基板
22 半導体チップ
23 はんだボール
24 周辺チップ部品
31 ハンド機構
321,322 把持ハンド
33 予圧印加手段
34 プッシュプル型エアーシリンダ
35 スライダガイド
36 弾性部材
371,372 歪ゲージ
38 ハロゲンランプ
39 昇降機構
401,402 並進機構
80 基板
81 半導体部品
82 はんだボール
83 熱伝導体治具
84 熱源
91 熱源
92 フード
93 ランプ
94 ランプホルダ
【技術分野】
【0001】
本発明は、表面実装型部品(BGA:Ball Grid Array、CSP:Chip Scale Package)のリワーク時における表面実装型部品の取り外し方法、表面実装型部品取り外し装置及び半導体パッケージの製造方法に関するものである。
【背景技術】
【0002】
携帯電話やパーソナルコンピュータなどの基板には、高密度化されたBGA(BallGrid Array)型或いはCSP(ChipScale Package)型の半導体部品が用いられている。
【0003】
これらの表面実装型部品は、基板にクリームハンダで位置決めされ仮固定の状態で、温風リフローなどの手段で、裏面に配したハンダボールを溶融して基板へ実装している。この際に、初期の位置ずれなどの要因で、隣接間ショートなど電気的な不具合が生じるケースがある。そのため、不具合のある表面実装型部品を一旦基板から取り外して、再度基板に実装する修正(リワーク)工程が必要になる。
【0004】
図12は、従来の表面実装型部品の取り外し工程におけるはんだ溶融工程の概念的構成図である。図に示すように、基板80にはんだボール82により実装したBGA型或いはCSP型等の表面実装型の半導体部品81の背面に熱伝導体治具83を接触させ、その上方に熱源84を配置する。この場合の熱源84としては、伝導熱でも、放射熱でも或いは熱風でも良く、その熱源84の熱によりはんだボール82を溶融させて半導体部品81を基板80から取り外す。
【0005】
図13は従来の熱源の概念的構成図であり、図13(a)は熱風方式の溶融装置であり、図13(b)は赤外線加熱方式の溶融装置である。熱風方式の溶融装置の場合には、図13(a)に示すように、抵抗加熱体等の熱源91をフード92により覆い、空気を熱源91に吹き付けて、加熱され熱風を半導体部品81に吹き付けてはんだボール82を溶融している。
【0006】
一方、赤外線加熱方式の溶融装置の場合には、図13(b)に示すように、ハロゲンランプ等のランプ93を反射体を兼ねるランプホルダ94内に収容して、赤外線を半導体部品81に照射してはんだボール82を溶融している。
【0007】
これらの工程においては、修正(リワーク)対象の半導体部品81の加熱温度を管理し、はんだの融点以上の温度となった時点で溶融と判断し修正を開始する。なお加熱効率を高めるため、基板80の裏面からも予備加熱を行うこともある。
【0008】
また、はんだボールの溶融時における半導体部品81の沈み込みによる変位を検出して溶融判定を行う手法もある。
【先行技術文献】
【特許文献】
【0009】
【特許文献1】特開2010−161123号公報
【特許文献2】特開平10−303546号公報
【特許文献3】特開平04−258195号公報
【発明の概要】
【発明が解決しようとする課題】
【0010】
リワーク工程においては、リワーク対象部品のみを正確に加熱できれば問題ないが、熱風・赤外線加熱は、近傍の弱熱チップ部品にも加熱時の影響を与え、接触不具・破壊など電気的な影響が生じる虞がある。
【0011】
また、溶融検知方式においては、加熱時間管理あるいは溶融時の部品沈み込みを検知して行うため、特に、CSPチップでは狭小ピッチ化された部品であるため、沈み込み量が極めて小さくなり、検知感度低下によって、過剰加熱が避けられないという問題がある。
【0012】
したがって、本発明は、はんだ溶融時を正確に検知して過剰加熱を防止することを目的とする。
【課題を解決するための手段】
【0013】
開示する一観点からは、基板上にはんだ固定された表面実装型部品をハンド機構に設けた把持ハンドにより把持する工程と、前記ハンド機構に前記基板の表面に沿った方向に一定の与圧を加える工程と、前記表面実装型部品を加熱して前記はんだを溶融する工程と、前記はんだの溶融時に前記表面実装型部品の横ずれによる前記予圧の変動を検知する工程と、前記予圧の変動が予め定めた値より大きくなった時に、前記把持ハンドを上方退避させて前記表面実装型部品を前記基板から分離する工程とを有することを特徴とする表面実装型部品の取り外し方法が提供される。
【0014】
また、開示する別の観点からは、基板上にはんだ固定された表面実装型部品を把持する把持ハンドを備えたハンド機構と、前記ハンド機構に前記基板の表面に沿った方向に与圧を加える予圧手段と、前記ハンド機構に設けられ、前記予圧手段から前記表面実装型部品に印加される予圧による横ずれに起因する変動を検知する予圧力検知機構と、前記ハンド機構を昇降する昇降機構と、前記表面実装型部品のはんだを加熱溶融する加熱手段とを備えたことを特徴とする表面実装型部品取り外し装置が提供される。
【0015】
また、さらに開示する別の観点からは、基板上にはんだ固定された表面実装型部品をハンド機構に設けた把持ハンドにより把持し、前記ハンド機構に前記基板の表面に沿った方向に一定の与圧を加え、前記表面実装型部品を加熱して前記はんだを溶融し、前記はんだの溶融時に前記表面実装型部品の横ずれによる前記予圧の変動を検知し、前記予圧の変動が予め定めた値より大きくなった時に、前記把持ハンドを上方退避させて前記表面実装型部品を前記基板から分離することを特徴とする半導体パッケージの製造方法が提供される。
【発明の効果】
【0016】
開示の表面実装型部品の取り外し方法、表面実装型部品取り外し装置及び半導体パッケージの製造方法によれば、はんだ溶融時を正確に検知して過剰加熱を防止することが可能になる。
【図面の簡単な説明】
【0017】
【図1】本発明の実施の形態における把持ハンド解放状態の説明図である。
【図2】本発明の実施の形態における把持ハンド部品支持状態の説明図である。
【図3】本発明の実施例1における把持ハンド解放状態の説明図である。
【図4】本発明の実施例1における把持ハンド部品支持状態の説明図である。
【図5】本発明の実施例1における予圧印加状態の説明図である。
【図6】本発明の実施例1におけるはんだ加熱溶融状態の説明図である。
【図7】本発明の実施例1におけるはんだ溶融横滑り現象後の説明図である。
【図8】本発明の実施例1における半導体チップ取り外し工程の説明図である。
【図9】本発明の実施例1の動作フロー図である。
【図10】本発明の実施例1の動作フローにおける和合成出力及び差合成出力の説明図である。
【図11】本発明の実施例2の表面実装部品の取り外し装置の概念的構成図である。
【図12】従来の表面実装型部品の取り外し工程におけるはんだ溶融工程の概念的構成図である。
【図13】従来の熱源の概念的構成図である。
【発明を実施するための形態】
【0018】
ここで、図1及び図2を参照して、本発明の実施の形態の表面実装型部品の取り外し方法を説明する。図1は、把持ハンド解放状態の説明図であり、図1(a)に示すように、表面実装型部品の取り外し装置は、把持ハンド12を備えたハンド機構11、予圧印加手段13、予圧力検知機構16、加熱手段17、昇降機構18を備えている。
【0019】
ハンド機構11は、回転チャック機構或いは並進チャック機構により、基板1にはんだボール等のはんだ3によって溶融固定された表面実装型部品2を把持する。また、把持ハンド12は熱遮蔽機能或いは断熱機能を有する部材で構成することが望ましい。なお、図における符号4は周辺チップ部品である。
【0020】
予圧印加手段13は、横方向、即ち、基板の主面方向に沿って予圧を印加できる機構であれば何でも良いが、例えば、スライドガイド15を備えたプッシュプル型のエアーシリンダ14を用いる。また、予圧力検知機構16としては、はんだ溶融完了直後の検知感度を高めるために典型的には歪ゲージを用い、一つの把持ハンド12の外側に接着して予圧を検知する。
【0021】
加熱手段17は、熱風、ハロゲンランプ等の赤外線ランプまたはヒーターのいずれか、或いは、それら内の少なくとも2つを組み合わせたものを用いる。また、昇降機構18は、半導体製造装置に用いられている一般的な昇降機構を用いれば良い。
【0022】
なお、加熱効率を高めるために、対向する把持ハンド12で形成される一対の辺とは別の一対の辺(紙面に平行方向の面)に、熱遮蔽または断熱機能を持った遮蔽板を配して、4方を閉鎖構造化して熱の周囲拡散を防止することが望ましい。
【0023】
図1(b)は予圧力検知機構の検知出力の説明図であり、図1(a)に示すように把持ハンドが解放状態の場合には、出力は検出されない。
【0024】
図2は、把持ハンド部品支持状態の説明図であり、ハンド機構11を駆動して表面実装型部品2を把持ハンド12で把持し、予圧印加機構13により横方向の予圧を印加した状態で、加熱手段18により熱を印加してはんだ3を溶融する。
【0025】
図2(b)は予圧力検知機構の検知出力の説明図であり、把持ハンド12により把持した状態で予圧を印加すると、予圧力検知機構の検知出力は徐々に上昇して所定の予圧力で一定となる。この状態で加熱溶融を行うと、はんだ3が溶融を開始すると印加される予圧により横ずれが発生し、拘束力が徐々に開放されて予圧力検知機構の検知出力は徐々に低下し、最終的には出力は0になる。
【0026】
この場合、予め閾値を設定して、検出出力が閾値X以下になった時点で昇降機構19を駆動して、表面実装型部品2を基板1から取り外す。閾値Xとしては0でも良いし、0以外の値でも良く、表面実装型部品2にダメージを与えることなく確実に取り外しのできる値を実験的に定めれば良い。
【0027】
このように、本発明の実施の形態においては、表面実装型部品の沈み込みではなく、横方向の予圧を印加して横滑りの変位を検出しているので、狭小ピッチ化された表面実装型部品の場合にも、はんだ溶融時を正確に検知して過剰加熱を防止することが可能になる。
【実施例1】
【0028】
次に、図3乃至図10を参照して、本発明の実施例1の表面実装型部品の取り外し方法及び表面実装型部品取り外し装置を説明する。図3は、把持ハンド解放状態の説明図であり、図3(a)に示すように、表面実装型部品の取り外し装置は、把持ハンド321,322を備えた回転チャック機構を有するハンド機構31にスライダガイド35及びプッシュプル型エアーシリンダ34を備えた予圧印加手段33が固着されている。また、他方の面には、長さがdの弾性部材36が備えられており、初期位置への復帰機能を有している。
【0029】
一対の把持ハンド321,322の対向する外側面に歪ゲージ371,372が取り付けられており、この歪ゲージ371,372が予圧力検知機構を構成する。歪ゲージ371,372は、それぞれ把持ハンド321,322の外側の面に、引張りおよび圧縮方向に変位が有った場合に、その変位に応じて抵抗値が増減し、そのときの状態を電気信号として検知する。
【0030】
また、ハンド機構31と予圧印加機構33との間の空間にはハロゲンランプ38からなる加熱手段が配置されている。スライドガイド35には昇降機構39が接続されており、表面実装型の半導体チップ22を把持する場合には、下降させ、はんだボール23の溶融が完了した段階で上昇させる。
【0031】
なお、加熱効率を高めるために、対向する把持ハンド321,322で形成される一対の辺とは別の一対の辺(紙面に平行方向の面)に、熱遮蔽または断熱機能を持った遮蔽板(図示は省略)を配して、4方を閉鎖構造化している。
【0032】
図3(b)は歪ゲージの出力の説明図であり、歪ゲージ371及び歪ゲージ372は無負荷状態であるので、出力はともに0である。
【0033】
図4は、把持ハンド部品支持状態の説明図であり、図4(a)に示すように、ハンド機構31の回転チャック機構を駆動して半導体チップ22を押圧力Fで把持する。図4(b)は歪ゲージの出力の説明図であり、歪ゲージ371及び歪ゲージ372はともに押圧力Fによる歪a,bを検出している。この検出出力に基づいて、和合成出力(a+b)と差合成出力(a−b)を得る。なお、この段階ではa=bであるので、差合成出力(a−b)は0である。
【0034】
図5は、予圧印加状態の説明図であり、図5(a)に示すように、プッシュプル型エアーシリンダ34を駆動して予圧を印加する。この時、基板21に設けたランド(図示は省略)の再生を容易にするために、弾性部材36の長さd′が、(d−d′)の値がはんだボール23のピッチと等しい値になるように予圧Pを印加する。
【0035】
図5(b)は歪ゲージの出力の説明図であり、左側の把持ハンド321に取り付けられた歪ゲージ371からは予圧Pによる歪出力αが加算された値が出力される。一方、右側の把持ハンド322に取り付けられた歪ゲージ372からは予圧Pに基づく歪出力αが減算された値が出力される。その結果、和合成出力(a+b)は同じままで、差合成出力(a−b)は2αとなる。
【0036】
図6は、はんだ加熱溶融状態の説明図であり、図6(a)に示すように、ハンド機構31に予圧を印加した状態でハロゲンランプ38を点灯して半導体チップ22を加熱してはんだボール23を溶融する。
【0037】
図6(b)は、歪ゲージの出力の説明図であり、和合成出力(a+b)は一定であるが、差合成出力(a−b)は、はんだボール23の溶融が始まると徐々に低下し、完全に溶融した状態で0になるので、この時点で溶融完了と判断してハロゲンランプ38を消灯する。
【0038】
図7は、はんだ溶融横滑り現象後の説明図であり、はんだボール23の溶融により横滑り現象が生じて半導体チップ22がはんだボール23の1ピッチ分だけ横方向(図における左方向)にずれて、歪ゲージ371,372は押圧力Fによる変位しか出力しなくなる。
【0039】
図8は、半導体チップ取り外し工程の説明図であり、昇降機構39を駆動して半導体チップ22をハンド機構31とともに上方に退避させて、半導体チップ22を基板21から取り外す。以降は、基板21のパッド(ランド)上の残留ハンダを、別途クリーニング機能によって掃除することによって、基板21を再度実装可能な状態に復帰させる。
【0040】
図9は、以上の工程を纏めた本発明の実施例1の動作フロー図であり、まず、把持検知ステップとして、
A.リワーク対象の半導体チップ22上で、加熱系を含めたハンド機構31を所定位置まで下降させる。次いで、
B.把持ハンド32を動作させて半導体チップ22に接触後、歪みゲージ371,372の出力が所定の押圧力Fになる信号を得るまで信号をモニタしながら挟み込みを継続する。その結果、
C.所定の信号を得て把持検知が行われ把持の完了が判断される。
【0041】
次いで、予圧印加検知ステップとして、
D.与圧印加機構33により基板21の主面と同方向に与圧Pを加え、歪ゲージ371,372の出力が、所定の予圧に応じた歪量αを加算或いは減算した値を出力するまで予圧を印加する。
E.歪ゲージ371,372の出力が、歪量αを加算或いは減算した値を出力した時点でハロゲンランプ38を添加して加熱を開始する。
【0042】
次いで、はんだ溶融検知ステップとして、
F.歪ゲージ371,372の差合成出力(a−b)の絶対値が所定の値X以下、典型的には0になるまで加熱を継続する。
G.歪ゲージ371,372の差合成出力(a−b)の絶対値が所定の値以下になった時点ではんだ溶融完了と見做して、ハロゲンランプ38を消灯して、加熱を終了する。
【0043】
最後に、
H.昇降機構39を駆動して半導体チップ22を上方へ退避させ、
I.所定位置に達した時点でハンド機構31の回転チャック機構を作動させて把持状態から解放状態にして半導体チップ22を取り出すことで、本発明の実施例1の動作フローは完了することなる。
【0044】
図10は、本発明の実施例1の動作フローにおける和合成出力及び差合成出力の説明図であり、和合成出力(a+b)は把持ハンド321,322による把持が行われた時点からは一定の値に維持される。一方、差合成出力(a−b)は予圧が所定の値まで印加された状態で2αとなり、はんだ溶融が始まると急減に低下し、はんだが完全に溶融した時点で0になる。
【0045】
このように、本発明の実施例1においては、従来の垂直方向の与圧方式とは異なり横方向の予圧印加方式を採用しているので、はんだボールが狭ピッチ化した半導体チップの場合にも、はんだ溶融時点を正確に検知することができる。それによって、過剰加熱が回避されるので、周辺チップ部品24に対する熱的影響を軽減することができる。
【実施例2】
【0046】
次に、図11を参照して、本発明の実施例2の表面実装部品取り外し装置を説明する。図11は本発明の実施例2の表面実装部品の取り外し装置の概念的構成図であり、図3に示した本発明の実施例1の表面実装部品の取り外し装置におけるチャック機構を回転チャック機構から並進チャック機構に変更したものであり、その他の構成は同等である。
【0047】
図11に示すように、ハンド機構31には把持ハンド321,322に固定された並進機構401,402を備えており、この並進機構401,402を水平方向に移動させることによって、半導体チップ22を把持する。
【0048】
この本発明の実施例2においても、従来の垂直方向の与圧方式とは異なり横方向の予圧印加方式を採用しているので、はんだボールが狭ピッチ化した半導体チップの場合にも、はんだ溶融時点を正確に検知することができる。それによって、過剰加熱が回避されるので、周辺チップ部品24に対する熱的影響を軽減することができる。
【0049】
ここで、実施例1及び実施例2を含む本発明の実施の形態に関して、以下の付記を付す。
(付記1)基板上にはんだで固定された表面実装型部品をハンド機構に設けた把持ハンドにより把持する工程と、前記ハンド機構に前記基板の表面に沿った方向に一定の与圧を加える工程と、前記表面実装型部品を加熱して前記はんだを溶融する工程と、前記はんだの溶融時に前記表面実装型部品の横ずれによる前記予圧の変動を検知する工程と、前記予圧の変動が予め定めた値より大きくなった時に、前記把持ハンドを上方退避させて前記表面実装型部品を前記基板から分離する工程とを有することを特徴とする表面実装型部品の取り外し方法。
(付記2)前記予め定めた値が、前記はんだのピッチが、前記予圧の印加方向における滑り量と等しくなる時の値であることを特徴とする付記2に記載の表面実装型部品の取り外し方法。
(付記3)基板上にはんだ固定された表面実装型部品を把持する把持ハンドを備えたハンド機構と、前記ハンド機構に前記基板の表面に沿った方向に与圧を加える予圧印加手段と、前記ハンド機構に設けられ、前記予圧印加手段から前記表面実装型部品に印加される予圧による横ずれに起因する変動を検知する予圧力検知機構と、前記ハンド機構を昇降する昇降機構と、前記表面実装型部品のはんだを加熱溶融する加熱手段と、を備えたことを特徴とする表面実装型部品取り外し装置。
(付記4)前記予圧検知機構が、前記把持ハンドに固着されたひずみゲージであることを特徴とする付記3に記載の表面実装型部品取り外し装置。
(付記5)前記ハンド機構が、熱遮蔽機能或いは断熱機能を有するとともに、前記表面実装型部品の前記把持ハンドにより把持される一対の面と異なる一対の面に沿って、熱遮蔽機能或いは断熱機能を有する遮蔽板を有することを特徴とする付記3または付記4に記載の表面実装型部品取り外し装置。
(付記6)前記ハンド機構が、前記基板を把持するための回転機構或いは並進機構のいずれかからなる開閉機構を備えていることを特徴とする付記3乃至付記5のいずれか1に記載の表面実装型部品取り外し装置。
(付記7)前記加熱手段が、熱風、赤外線ランプまたはヒーターのいずれか、或いは、それらの内の少なくとも2つを組み合わせ加熱手段からなる付記1乃至付記3のいずれか1に記載の表面実装型部品取り外し装置。
(付記8)基板上にはんだ固定された表面実装型部品をハンド機構に設けた把持ハンドにより把持し、前記ハンド機構に前記基板の表面に沿った方向に一定の与圧を加え、前記表面実装型部品を加熱して前記はんだを溶融し、前記はんだの溶融時に前記表面実装型部品の横ずれによる前記予圧の変動を検知し、前記予圧の変動が予め定めた値より大きくなった時に、前記把持ハンドを上方退避させて前記表面実装型部品を前記基板から分離することを特徴とする半導体パッケージの製造方法。
【符号の説明】
【0050】
1 基板
2 表面実装型部品
3 はんだ
4 周辺チップ部品
11 ハンド機構
12 把持ハンド
13 予圧印加手段
14 エアーシリンダ
15 スライドガイド
16 予圧力検知機構
17 加熱手段
18 昇降機構
21 基板
22 半導体チップ
23 はんだボール
24 周辺チップ部品
31 ハンド機構
321,322 把持ハンド
33 予圧印加手段
34 プッシュプル型エアーシリンダ
35 スライダガイド
36 弾性部材
371,372 歪ゲージ
38 ハロゲンランプ
39 昇降機構
401,402 並進機構
80 基板
81 半導体部品
82 はんだボール
83 熱伝導体治具
84 熱源
91 熱源
92 フード
93 ランプ
94 ランプホルダ
【特許請求の範囲】
【請求項1】
基板上にはんだ固定された表面実装型部品をハンド機構に設けた把持ハンドにより把持する工程と、
前記ハンド機構に前記基板の表面に沿った方向に一定の与圧を加える工程と、
前記表面実装型部品を加熱して前記はんだを溶融する工程と、
前記はんだの溶融時に前記表面実装型部品の横ずれによる前記予圧の変動を検知する工程と、
前記予圧の変動が予め定めた値より大きくなった時に、前記把持ハンドを上方退避させて前記表面実装型部品を前記基板から分離する工程と
を有することを特徴とする表面実装型部品の取り外し方法。
【請求項2】
前記予め定めた値が、前記はんだのピッチが、前記予圧の印加方向における滑り量と等しくなる時の値であることを特徴とする請求項2に記載の表面実装型部品の取り外し方法。
【請求項3】
基板上にはんだ固定された表面実装型部品を把持する把持ハンドを備えたハンド機構と、
前記ハンド機構に前記基板の表面に沿った方向に与圧を加える予圧印加手段と、
前記ハンド機構に設けられ、前記予圧印加手段から前記表面実装型部品に印加される予圧による横ずれに起因する変動を検知する予圧力検知機構と、
前記ハンド機構を昇降する昇降機構と、
前記表面実装型部品のはんだを加熱溶融する加熱手段と、
を備えたことを特徴とする表面実装型部品取り外し装置。
【請求項4】
前記予圧検知機構が、前記把持ハンドに固着されたひずみゲージであることを特徴とする請求項3に記載の表面実装型部品取り外し装置。
【請求項5】
前記ハンド機構が、熱遮蔽機能或いは断熱機能を有するとともに、
前記表面実装型部品の前記把持ハンドにより把持される一対の面と異なる一対の面に沿って、熱遮蔽機能或いは断熱機能を有する遮蔽板を有することを特徴とする請求項3または請求項4に記載の表面実装型部品取り外し装置。
【請求項6】
基板上にはんだ固定された表面実装型部品をハンド機構に設けた把持ハンドにより把持し、
前記ハンド機構に前記基板の表面に沿った方向に一定の与圧を加え、
前記表面実装型部品を加熱して前記はんだを溶融し、
前記はんだの溶融時に前記表面実装型部品の横ずれによる前記予圧の変動を検知し、
前記予圧の変動が予め定めた値より大きくなった時に、前記把持ハンドを上方退避させて前記表面実装型部品を前記基板から分離することを特徴とする半導体パッケージの製造方法。
【請求項1】
基板上にはんだ固定された表面実装型部品をハンド機構に設けた把持ハンドにより把持する工程と、
前記ハンド機構に前記基板の表面に沿った方向に一定の与圧を加える工程と、
前記表面実装型部品を加熱して前記はんだを溶融する工程と、
前記はんだの溶融時に前記表面実装型部品の横ずれによる前記予圧の変動を検知する工程と、
前記予圧の変動が予め定めた値より大きくなった時に、前記把持ハンドを上方退避させて前記表面実装型部品を前記基板から分離する工程と
を有することを特徴とする表面実装型部品の取り外し方法。
【請求項2】
前記予め定めた値が、前記はんだのピッチが、前記予圧の印加方向における滑り量と等しくなる時の値であることを特徴とする請求項2に記載の表面実装型部品の取り外し方法。
【請求項3】
基板上にはんだ固定された表面実装型部品を把持する把持ハンドを備えたハンド機構と、
前記ハンド機構に前記基板の表面に沿った方向に与圧を加える予圧印加手段と、
前記ハンド機構に設けられ、前記予圧印加手段から前記表面実装型部品に印加される予圧による横ずれに起因する変動を検知する予圧力検知機構と、
前記ハンド機構を昇降する昇降機構と、
前記表面実装型部品のはんだを加熱溶融する加熱手段と、
を備えたことを特徴とする表面実装型部品取り外し装置。
【請求項4】
前記予圧検知機構が、前記把持ハンドに固着されたひずみゲージであることを特徴とする請求項3に記載の表面実装型部品取り外し装置。
【請求項5】
前記ハンド機構が、熱遮蔽機能或いは断熱機能を有するとともに、
前記表面実装型部品の前記把持ハンドにより把持される一対の面と異なる一対の面に沿って、熱遮蔽機能或いは断熱機能を有する遮蔽板を有することを特徴とする請求項3または請求項4に記載の表面実装型部品取り外し装置。
【請求項6】
基板上にはんだ固定された表面実装型部品をハンド機構に設けた把持ハンドにより把持し、
前記ハンド機構に前記基板の表面に沿った方向に一定の与圧を加え、
前記表面実装型部品を加熱して前記はんだを溶融し、
前記はんだの溶融時に前記表面実装型部品の横ずれによる前記予圧の変動を検知し、
前記予圧の変動が予め定めた値より大きくなった時に、前記把持ハンドを上方退避させて前記表面実装型部品を前記基板から分離することを特徴とする半導体パッケージの製造方法。
【図1】


【図2】
【図3】
【図4】
【図5】

【図6】
【図7】

【図8】

【図9】
【図10】
【図11】
【図12】
【図13】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【公開番号】特開2013−8789(P2013−8789A)
【公開日】平成25年1月10日(2013.1.10)
【国際特許分類】
【出願番号】特願2011−139461(P2011−139461)
【出願日】平成23年6月23日(2011.6.23)
【出願人】(000005223)富士通株式会社 (25,993)
【Fターム(参考)】
【公開日】平成25年1月10日(2013.1.10)
【国際特許分類】
【出願日】平成23年6月23日(2011.6.23)
【出願人】(000005223)富士通株式会社 (25,993)
【Fターム(参考)】
[ Back to top ]