
表面形状測定装置及び露光装置
【課題】単純な構成で高精度に被測定物体の表面形状を測定する表面形状測定装置及び露光装置を提供する。
【解決手段】表面形状測定装置は、光源からの白色光をモスアイ形状の反射防止部を有するプリズムを用いて基板と参照面に80度以上の入射角で入射させ、白色干渉光を得る。波長選択が可能な光学フィルターを用いて白色干渉光を複数の単一光による干渉光に分解する。その複数の干渉光に対して高速フーリエ変換を行いパワースペクトル分布を求め、スペクトルのピーク位置情報を用いて基板の表面形状を測定する。
【解決手段】表面形状測定装置は、光源からの白色光をモスアイ形状の反射防止部を有するプリズムを用いて基板と参照面に80度以上の入射角で入射させ、白色干渉光を得る。波長選択が可能な光学フィルターを用いて白色干渉光を複数の単一光による干渉光に分解する。その複数の干渉光に対して高速フーリエ変換を行いパワースペクトル分布を求め、スペクトルのピーク位置情報を用いて基板の表面形状を測定する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、表面形状測定装置及び露光装置に関する。
【背景技術】
【0002】
原版と基板を同期走査するステップアンドスキャン方式を使用して、原版パターンを投影光学系を介して基板に露光する走査型露光装置は従来から知られている(例えば、特許文献1を参照)。走査型露光装置では、基板表面を露光中に投影光学系の像面位置に実時間で合わせ込む必要があるために、被露光位置が走査領域である露光スリットに差し掛かる前に基板の表面位置(高さ)と傾きを斜入射光を利用して計測する(例えば、特許文献2を参照)。
【0003】
また、基板表面形状の情報を含む白色干渉光を、複数の単一波長による干渉光に分解して光電変換し、得られた複数の干渉信号に対して高速フーリエ変換(FFT)を行い、基板表面形状を求める方法を基板の表面形状に適用することができる。測定原理は、非特許文献1に開示されている。白色干渉光を単一波長による干渉光に分離する方法として、互いに波長透過特性の異なるガラスフィルターを複数用意し、その組み合わせを変える方法、あるいは、光源であるレーザーの波長を可変にする方法が知られている。
【特許文献1】米国特許第4861162号明細書
【特許文献2】特開平06−260391号公報
【非特許文献1】郭 志徹他、「波長走査干渉計における信号処理」、精密光学会誌、日本、社団法人精密光学会、2003年、第69巻第6号第831頁
【発明の開示】
【発明が解決しようとする課題】
【0004】
近年の高解像度の要請からフォーカス及びチルトの計測にも高い精度が要求されており、従来の斜入射光を利用した計測方法では、基板の周辺パターンの影響やレジストの厚さむらによって所期の計測精度が得られなくなってきた。この場合、基板への入射角を80度以上にすれば基板の縦構造に起因する問題は解決することはできるが、光学系が複雑かつ大型になり、光路長が長くなることにより、外乱の影響を受け易くなる。
【0005】
一方、白色干渉光を使用した表面形状測定装置において、ガラスフィルターによる分離は光学系の一部に可動部を設けなければならないので表面形状測定装置が複雑になる。また、レーザーの発信波長を可変にする方法も、やはり表面形状測定装置が複雑化する。
【0006】
そこで、本発明は、単純な構成で高精度に被測定物体の表面形状を測定する表面形状測定装置及び露光装置を提供することを例示的な目的とする。
【課題を解決するための手段】
【0007】
本発明の一側面としての表面形状測定装置は、被測定物体の表面形状を測定する表面形状測定装置において、白色光を発する光源と、前記光源からの前記白色光を二光束に分割する光束分割手段と、当該光束分割手段によって分割されて前記被測定物体に向かう一方の光束の入射角を大きくし、前記白色光の波長以下の周期で形成されてモスアイ形状を有する第1反射防止部を有する第1プリズムと、当該光束分割手段によって分割されて参照光学素子の参照面に向かう他方の光束の入射角を大きくし、前記白色光の波長以下の周期で形成されてモスアイ形状を有する第2反射防止部を有する第2プリズムと、前記第1プリズムを経た前記被測定物体の表面形状の情報を含む反射光である物体光と前記第2プリズムを経た前記参照面の表面形状の情報を含む反射光である参照光とを重ね合わせて白色干渉光を生成する重ね合わせ手段と、前記白色干渉光を複数の波長毎に離散的に分離するリオフィルターと、前記リオフィルターが分離した前記白色干渉光を光電変換する光電変換素子と、前記光電変換素子の出力からパワースペクトルの分布を求め、当該パワースペクトルのピーク位置の情報を用いて前記基板の表面形状を求める演算部と、を有することを特徴とする。かかる表面形状測定装置を有する露光装置も本発明の一側面を構成する。
【発明の効果】
【0008】
本発明によれば、単純な構成で高精度に被測定物体の表面形状を測定する表面形状測定装置及び露光装置を提供することができる。
【発明を実施するための最良の形態】
【0009】
以下、添付図面を参照して、本発明の実施例を説明する。
【実施例1】
【0010】
以下、図1〜図6を参照して、実施例1の露光装置1について説明する。露光装置1は、原版(マスク又はレチクル)Rと基板(ウエハや液晶基板)Wとを同期走査して、原版パターンを投影光学系3を介して基板Wに露光する走査型露光装置である。投影光学系3は、原版パターンを基板に縮小投影する。なお、図1は、原版を照明する照明装置(光源及び照明光学系)は省略している。
【0011】
図1において、基板Wは、計測用ステージ5と露光用ステージ(基板ステージ)6との間をチャック7に吸着された状態で搬送される。露光用ステージ6では、投影光学系3によって導かれた原版Rからの光が基板W上に投影される。チャック7上では基板Wの位置計測のためのチャックマーク9が設けられ、計測用ステージ5では、チャックマーク9と基板Wとの3次元的な位置関係がアライメント検出系8を用いて計測される。その後、基板Wを吸着したままチャック7が露光用ステージ6に移動する。露光用ステージ6では、チャックマーク9の3次元的な位置がアライメント検出系8によって計測され、その計測結果及び基板Wとチャックマーク9との位置関係情報とを用いて露光用ステージ6における基板Wの3次元的な位置(XYZ方向の位置)が把握される。計測用ステージ5の周辺には表面形状測定装置10Aが配置されている。表面形状測定装置10Aは、被測定物体としての基板Wの表面形状を測定する。露光装置1は、図示しないコントローラを含み、表面形状測定装置の測定結果に基づいて原版Rと基板Wを同期走査する際に基板Wの投影光学系3の光源方向(Z方向)の位置をステージ6を介して調節する。
【0012】
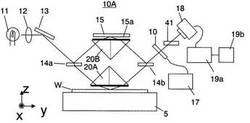
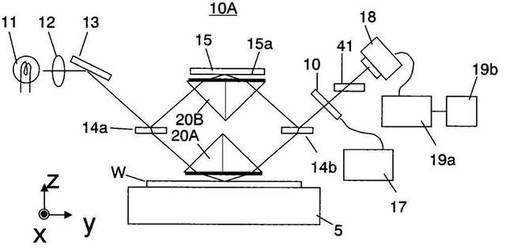
図2は、表面形状測定装置10Aの断面図である。表面形状測定装置10Aは、光源11、投光光学系12、ミラー13、ハーフミラー14a及び14b、プリズム20A及び20B、光学フィルター16、制御部17、撮像素子18、記憶部19a、演算部19bを有する。
【0013】
光源11は、白色光を発する。白色光は、ある波長幅を有した光を意味し、白色の光を意味しない。光源11は、ハロゲンランプ、メタルハライドランプ、キセノンランプなどを使用することができる。基板W上のレジストは白色光によっては感光しない。本実施例では、光源11は、波長可変レーザーを使用しないので表面形状測定装置10Aの構成は単純になる。
【0014】
投光光学系12は、白色光を所望の形状に成形する。ミラー13は白色光を偏向する。ハーフミラー14aは、光源11からの白色光を二光束に分割する光束分割手段として機能する。
【0015】
プリズム(第1プリズム)20Aは、ハーフミラー14aによって分割されて基板Wに向かう一方の光束の入射角を大きくし、白色光の波長以下の周期で形成されてモスアイ(Moth−eye)形状の反射防止部(第1反射防止部)を有する。ハーフミラー14aを透過した光は、プリズム20Aに入射し、プリズム20Aの出射面で屈折した光は、基板Wに対して角度θ(θ≧80度)の入射角で斜め方向から入射する。なお、「プリズム20Aの出射面」とは、図2に示す二等辺三角形の形状をしたプリズム20Aの底辺部を意味する。入射角θは、基板Wの表面に垂直な高さ方向(Z方向)となす光線の角度である。
【0016】
図3は、図2における基板Wと入射光との関係を示す斜視図であり、基板W上の複数のショット領域をカバーすべく広範の領域Aを照明している。図1において、基板Wを反射した光は再度プリズム20Aに入射し、プリズム20Aの斜辺からプリズム20Aの外に出射し、ハーフミラー14bに到達する。
【0017】
プリズム(第2プリズム)20Bは、ハーフミラー14aによって分割されて参照光学素子15の参照面15aに向かう他方の光束の入射角を大きくし、白色光の波長以下の周期で形成されてモスアイ形状の反射防止部(第2反射防止部)を有する。プリズム20Bはプリズム20Aと同一構造を有する。図1において、参照面15aを反射した光は再度プリズム20Bに入射し、プリズム20Bの斜辺からプリズム20Bの外に出射し、ハーフミラー14bに到達する。
【0018】
ハーフミラー14bは、プリズム20Aを経た基板Wの表面形状の情報を含む反射光である物体光と、プリズム20Bを経た参照面15aの表面形状の情報を含む反射光である参照光とを重ね合わせて白色干渉光を生成する重ね合わせ手段として機能する。
【0019】
白色干渉光は、波長選択が可能な光学フィルター16を透過し、受光光学系41を介して撮像素子(検出部)18に入射する。
【0020】
本実施例の光学フィルター16は白色干渉光を複数の波長毎に離散的に分離するリオフィルター(LyotFilter)である。リオフィルターは特定波長の光だけを透過するフィルターである。リオフィルターは、透過する直線偏光の振動方向を平行にした複数個の偏光子の列の間に光学軸が端面に平行で厚さが2nd(n=0、1、2、・・・)の結晶板(例えば、水晶板)を光学軸が偏光子の振動方向に45°をなすように配置した構成を有する。計測用ステージ5が、基板Wの表面に垂直な方向(Z方向)に基板Wを駆動することによって光学フィルター16は、白色干渉光を複数の波長毎に離散的に分離する。このように、本実施例では、白色干渉光を複数の単一の波長の干渉光に分離する際に、ガラスフィルターを使用せず、本来備わっている計測用ステージ5を可動部としている。これにより、光学系の一部に可動部を設ける必要はなく、表面形状測定装置10Aの構成は単純になる。
【0021】
撮像素子18は、CCDから構成され、光学フィルター16が分離した前記白色干渉光を光電変換する光電変換素子として機能する。
【0022】
撮像素子18が出力する光電変換信号は、基板Wの表面形状に関する情報を有する干渉信号であり、記憶部19aに記録される。演算部19bは、記憶部19aが格納したデータからパワースペクトルの分布を求め、パワースペクトルのピーク位置の情報を用いて基板Wの表面形状を求める。
【0023】
以下、プリズム20Aについて説明する。なお、上述したように、プリズム20Bはプリズム20Aと同一構造を有するため、その説明を省略する。図4(a)は、プリズム20Aの側面図、図4(b)は図4(a)のA部の拡大図である。プリズム20Aの底辺部には、プリズム20Aを構成する屈折率Nのガラスと同じ屈折率、あるいは同等の屈折率を有する部材で構成され、その立体形状が測定光の波長以下のオーダーのモスアイ形状を有する反射防止部22Aが付加されている。モスアイ形状は、表面に数百ナノメートルスケールで規則的な突起配列を有する構造であり、微細凹凸の頂点における周期Pと測定光の波長λとの間に次式が成立する。
【0024】
【数1】

【0025】
微細凹凸パターンを物品の表面に設けると外界(空気)との境界部における急激で不連続な屈折率変化を、図4(c)に示す連続的で漸次推移する屈折率変化に変えることができるため、プリズム20Aの底辺部分における光反射が減る。特に、反射防止部22Aは、プリズム20Aの底辺を出射する光、あるいは、プリズム20Aの底辺に入射する物体光は、80度以上で入出射する光に対して最適化されている。反射防止部22Aは、図4(a)に示す円錐形状の複数の突起23AがXY平面で隙間無く(密に)配列されている形状を有する。しかし、別の実施例では、反射防止部22Bは、図4(d)に示すように、円錐台形状の複数の突起23BがXY平面で間隔Sをもって配列されている形状を有する。図4(d)において、P=500nm、S=330nm、h=430nm、t=100nmとした時、λ=780nm近辺での光に対して透過率60%以上の光量の光を得ることができる。
【0026】
次に、撮像素子18で検出される干渉信号に基づいて、演算部19bが基板Wの表面形状を求める方法について説明する。図2において、光源11から発せられた白色光のうち、ある特定の波長に着目し、その波長を有する光束の基板Wからの物体光の強度をio、参照面15aからの参照光の強度をiRとし、図3の測定点Pの位置をP(x’、y’)とする。すると、測定点Pでの干渉信号の強度は数式1で表すことができる。ここで、H(x’、y’)は、基板W上の点P(x’、y’)の基準面からの距離であり、2π/λで与えられる波数である。
【0027】
【数2】
【0028】
再び、図2を参照するに、ハーフミラー14b以降で発生した白色干渉光に対して、光学フィルター16によって分離された、複数の単一の波長による干渉光の干渉信号を撮像素子18にて検出する。光電検出する干渉光の波長を離散的に変化されば、測定面上のある一点、例えば、図3の測定点Pでの時系列の干渉信号i(nΔt)は、Hの逆数を周期とする周期関数となる。そして、この時系列の干渉信号i(t)を高速フーリエ変換(FFT)し、その結果であるパワースペクトルにおけるピーク値は、測定点の高さに応じて変化する結果となる。ここで、パワースペクトルのピーク値を有する周波数をfpeakとすると測定点Pでの絶対高さHは数式2で求めることができる。ここで、高さ計測の最小分解能Δhは光学フィルター16による波長変化の幅によって決まる数値である。
【0029】
【数3】
【0030】
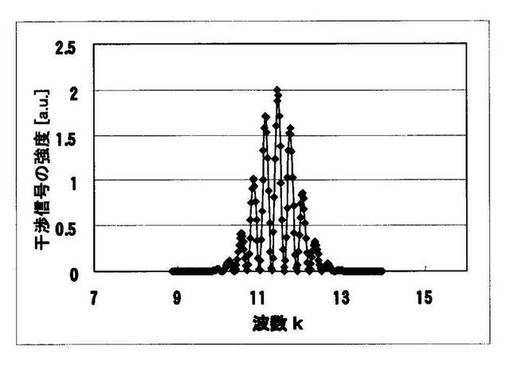
図5及び図6に、上記方法に従って求めた、測定点Pの高さ計測の結果を示す。図5は、数式4で表される波数kを8.874から13.974の範囲(λの変化に換算すると0.708μm〜0.450μm)で0.02ステップで変化させた時の各ステップ毎に得られる干渉信号のPの位置での強度である。
【0031】
【数4】
【0032】
kの値を変化させる手段は、光学フィルター16を用いて行い、kの最大値、最小値及びステップ量(波長の変化幅)等は制御部17で任意に設定することができる。
【0033】
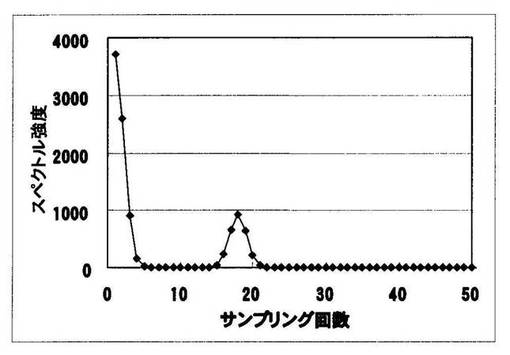
図6は、点Pの位置における波数変化に対する干渉信号の強度にFFTを行い、スペクトル分布を示したグラフである。図6において、スペクトルが最大値となる時のkの値はガウス曲線法にて求めた。そして、その値をkMax=16.900とし、kのステップ量Δk、基板Wへの物体光の入射角θ、FFTのサンプリング回数Snから求められる表面形状の高さ方向の分解能Δhを数式5で求める。
【0034】
【数5】
【0035】
図3の測定点Pの高さHpは以下に示す式から58.72umという結果を得た。ここで、Δk=0.02、θ=80度、Sn=256とした。数式6において、kMaxは数式4においてピークを与える波長λによって求まるkである。
【0036】
【数6】
【0037】
上記に述べた高さ計測は、図3の測定点Pでの結果であるが、測定点P以外の任意の場所で同様な高さ計測を行えば、二次元領域の高さ計測が可能となる。本実施例は、光学フィルター16を、物体光と参照光がそれぞれの反射面である基板W、及び参照面15aを反射した後の光路中に設置したが、この設置位置に限定されない。例えば、光学フィルター16は、物体光、参照光が反射面に到達する前の光路中、例えば、ミラー13とハーフミラー14aの間の光路中に設置してもよい。
【0038】
このように、演算部19bは、パワースペクトルの分布を求め、特定位置についてピークを与える波長を選択し、数式6から基板Wの表面形状を求める。なお、光学フィルター16が与える波長は離散的であるために、本実施例の演算部19bは、離散的な計測点の間を補完している。
【実施例2】
【0039】
以下、図7〜図11を参照して、実施例2について説明する。本実施例も図1に示す露光装置1を共通に使用することができるが、本実施例は、表面形状測定装置10Aの代わりに表面形状測定装置10Bを使用する。表面形状測定装置10Bは、表面形状測定装置10Aにマルチカンチレバーユニット30を更に有する点で相違する。
【0040】
マルチカンチレバーユニット30は、平板状の保持部31と、複数のカンチレバー35と、を有し、プリズム20Aと基板Wとの間に設けられている。
【0041】
保持部31は、平板形状を有し、ハーフミラー14aによって分割された一方の光束の光路に対応する部分に点線で示す直方体形状の穴32を有する。
【0042】
複数のカンチレバー35は、保持部31の底面31aに取り付け部36aにおいて片持ち支持された基部36と、基部36に固定されて基板Wの表面に接触可能な計測プローブ37と、を各々有する。計測プローブ37は、取り付け部36aとは反対の端部である基部36の先端に取り付けられている。計測プローブ37は、本実施例では円錐形状を有し、円錐の先端部が下になるように(即ち、底円において)基部36に取り付けられている。本実施例では、物体光は、カンチレバー35の基部36の背面36bから反射された光である。背面36bにおける反射位置36cは、基部36の背面36bの略中央部であるが、測定したいのは、背面36bにおいてヘッド部である計測プローブ37が取り付けられている部分とは裏側のヘッド位置36dである。このため、本実施例の演算部19bは、実際の反射位置36cをヘッド位置36dに変換するためのキャリブレーションを行う。
【0043】
図7は、マルチカンチレバーユニット30の複数のカンチレバー35の配置例を示している。例えば、一辺が35mmの正方形領域内にカンチレバー35を1mm間隔で縦横に各36個(合計1296個)配置している。本実施例は、このようにカンチレバー35を複数配列したものをマルチカンチレバーと呼んでいる。図7では、複数のカンチレバー35は二次元的に配置されているが、一次元的に配置されてもよい。
【0044】
カンチレバー35は、市販の原子間力顕微鏡(AFM)に使用されており、測定対象とカンチレバー35との間に作用する原子間力(ファンデルワールス力)を利用して測定対象のZ方向(紙面垂直方向)位置を測定する。
【0045】
図12(a)に示すような従来のフォーカス・チルト検出系100においては、斜入射照明光(複数の光束)Lでマルチマーク102を照明し、そこからの光を投射光学系104が基板表面に投射し、受光光学系106がその反射光を受光する。基板表面(正しくは基板に塗布されたレジスト表面)に高入射角度で照明光Lを入射させ、反射光をガルバノミラー108で走査させ、スリット110を透過した光を検出部112で光電変換する。検出部112の出力の信号を信号処理し、図12(b)に示すように、デフォーカス信号がベストフォーカス信号となるように基板Wを矢印で示す光軸方向に駆動してフォーカス制御を行う。また、異なる位置の高さ計測情報から露光すべき基板面のチルトを算出する。
【0046】
しかし、図13に示すように、周辺回路パターンやスクライブライン近傍においては、レジストRS表面の段差は焦点深度に比べて小さいが、フォーカス計測にとってはその計測結果に大きな誤差が発生してしまう。誤差は、レジスト表面の傾斜角度の影響により、フォーカス検出系に用いる測定光の基板からの反射光がレジスト内の多重反射やレジスト表面形状の影響を受けた屈折により、正反射角度からのずれが発生することに起因する。また、ICパターンの粗密の違いによっても反射率に差が生じる。そのため、フォーカス・チルト検出系100は、照明光Lの角度を80度以上として信号歪を軽減してオフセットの発生を防いでいるが、代わりに、光学系の引き廻しが複雑で大型になり、光路長が長くなって外乱の影響を受け易くなる。
【0047】
本実施例では、原子間力を利用することにより、光学的なオフセットの発生を防止することができ、基板上に塗布されたレジストの表面形状(表面高さの変化)を正確に計測することができる。
【0048】
図8は、複数のカンチレバー35が基板表面を計測している様子を示す側面図である。カンチレバー35の計測方式は光テコ方式と呼ばれ、計測プローブ37と基板W表面との間に作用する原子間力によって基板W表面の高さ位置に応じて上下移動する。カンチレバー35の基部36の背面36bに斜入射光L1を入射させ、カンチレバー35の背面36bからの反射光をCCD等の光検出器39によって検出することにより、カンチレバー35の高さ、即ち、基板Wの表面形状を計測する。
【0049】
図9は、マルチカンチレバーユニット30を有する表面形状測定装置10Bの断面図である。光源11から発せられた測定光L3は、ミラー13により偏向され、マルチスポット発生部40によって分割され、ハーフミラー14aで、物体光と参照光の2方向に光路が分割される。ハーフミラー14aを透過した物体光はプリズム20Aを透過して、マルチカンチレバーユニット30の背面36bに斜入射光L1として入射される。プリズム20Aは反射防止部22Aを有し、プリズム20Aの底辺部分を光が透過する際に、その入出射角度が80度以上の超斜入射角度の場合でも光量を損失することなく各カンチレバー35の背面36bに光を照射することができる。
【0050】
カンチレバー35の背面36bからの反射光は、ハーフミラー14b、光学フィルター16を透過し、受光光学系41により撮像素子18の受光面へと導かれる。一方、ハーフミラー14aが分割した他方の光は、プリズム20Bを透過し、80度以上の超斜入射角度で参照面15aに照射され、その反射光はハーフミラー14bを反射し、光学フィルター16、受光光学系41を経て撮像素子18の受光面へと導かれる。市販のAFMは光検出器として四分割センサーが用いるが、本実施例は、二次元撮像素子(例えば、エリア型CCD等)を用いる。
【0051】
基板Wの高さに応じてカンチレバー35の背面36bの高さ(Z方向)位置は変化するので、各カンチレバー35の高さを、実施例1で述べた方法で測定すれば基板Wの表面形状を測定することができる。例えば、1つのカンチレバー35に着目すると、カンチレバー35の背面36bに80度以上の超斜入射角度で照射された物体光と、参照面15aに超斜入射された参照光を、ハーフミラー14b以降で重ね合わせて白色干渉光を生成する。そして、光学フィルター16を用いて白色干渉光から、単一波長による干渉光を時系列的に複数の波長において分離して光電変換を行い、各波長毎の干渉信号を記憶部19aに記憶する。演算部19bは、これらの複数の干渉信号に対してFFTを行い、パワースペクトルのピーク位置を有する波数kMax(=2π/λn、nはサンプリング回数)を求める。そして、波数kMaxと数式5及び6で求められる高さ方向の分解能の値からカンチレバー35の背面36bの高さ変化を求めることができ、即ち、基板Wの表面形状を知ることができる。
【0052】
ここで、図10及び図11を用いて、カンチレバー35による基板Wの表面形状測定の原理を説明する。図10に示すように、ある任意の位置を基準としたZ方向におけるカンチレバー35の位置(例えば、カンチレバー35の背面36bの位置)を位置C、基板Wの計測点の表面位置を位置dとすると、両者の関係は図11に示すようになる。図11は、位置Cに保持したカンチレバー35に基板Wを徐々に近接させた場合のカンチレバー35の位置Cと基板Wの表面位置dとの関係を示すグラフ(フォースカーブ)である。ここで、図10中のZ方向(図中上方向)が正方向である。
【0053】
カンチレバー35が基板Wから充分離れている場合は、基板Wをカンチレバー35に近づけてもカンチレバー35の位置Cは変化しない。しかし、ある程度まで近接して基板Wの表面位置が位置d1になると(このとき、カンチレバー35のプローブ37と基板Wの表面とは所定距離となっている)、双方に原子間力が作用し始めて互いに引き合う。その後、基板Wが更にカンチレバー35に近づくと、カンチレバー35が引力で基板表面へと引きつけられ、カンチレバー35の位置Cの値が徐々に小さくなる(引力領域)。更に、基板Wがカンチレバー35に近づき、基板Wの表面位置が位置d2になると、今度は原子間力によって双方が逆に反発し合う。基板Wが更にカンチレバー35に近づくと、カンチレバー35が斥力で基板表面から遠ざかろうとし、カンチレバー35の位置Cの値が急激に大きくなる(斥力領域)。本実施例は、この斥力領域における反発特性を利用するためにカンチレバー35と基板Wとの距離d2以下となるように配置する。もちろん引力領域における引力特性を利用することも可能であるが、引力領域では1つのカンチレバー35の位置Cに対して対応する基板Wの位置が複数となる場合がある。従って、カンチレバー35の位置Cから一義的に基板Wの位置が決定されない場合があるので注意が必要である。カンチレバー35と基板Wとの距離を設定するに際しては、基板Wの表面形状の高さバラツキを考慮する必要がある。基板Wの表面形状の高さバラツキの値よりもカンチレバー35と基板Wとの距離を小さくしてしまうと、カンチレバー35のプローブ37が基板表面に接触してしまう虞があるからである。
【0054】
実施例2は、マルチカンチレバーユニット30を用いて非光学的な計測と光学的な計測とを組み合わせている。このため、基板上に塗布されたレジストの表面形状を光学的な方法のみによって計測する際に生じるオフセットが発生せず、ナノメートルオーダーでの高精度計測を行うことができる。
【0055】
以上説明した表面形状測定装置10A及び10Bは、構成が単純かつ小型で、超斜入射光であっても光量の損失が少ない光学系を構成することができる。また、波長を選択するための光学系も可動部を簡素化することができる。以上の一連の効果により、基板表面に塗布されたレジストによる計測誤差を受けることなく、縮小される焦点深度に対し高いフォーカス補正精度を達成し、一枚の基板あたりの歩留まり向上を得ることが可能である。
【0056】
なお、本実施例のデバイス製造方法は以下のようになる。即ち、デバイス(半導体集積回路素子、液晶表示素子等)は、前述のいずれかの実施例の露光装置を使用して感光剤を塗布した基板(ウエハ、ガラスプレート等)を露光する工程と、その基板を現像する工程と、他の周知の工程と、を経ることにより製造される。
【図面の簡単な説明】
【0057】
【図1】実施例1の露光装置の断面図である。
【図2】図1に示す露光装置の表面形状測定装置の断面図である。
【図3】図2に示す表面形状測定装置の基板と物体光との関係を異なる角度から見た斜視図である。
【図4】図4(a)は図3に示すプリズムの側面図、図4(b)は図4(a)の部分拡大図、図4(c)は屈折率変化を示す図、図4(d)は図4(b)の変形例の側面図である。
【図5】図3に示す測定点の高さ計測の結果を示す図である。
【図6】図3に示す測定点の高さ計測の結果を示す図である。
【図7】実施例2の表面形状測定装置のカンチレバーの配置を示す図である。
【図8】複数のカンチレバーが基板表面を計測している様子を示す側面図である。
【図9】実施例2の表面形状測定装置の断面図である。
【図10】図9の表面形状測定装置のカンチレバーの断面図である。
【図11】カンチレバーと基板との距離とカンチレバーの位置との関係を示すグラフである。
【図12】従来のフォーカス・チルト検出系の図である。
【図13】図12に示すフォーカス・チルト検出系の問題を説明するための断面図である。
【符号の説明】
【0058】
10A、10B 表面形状測定装置
11 光源
14a、14b ハーフミラー
16 光学フィルター
17 制御部
18 撮像素子(光電変換素子)
19a 記憶部
19b 演算部
20A、20B プリズム
30 マルチカンチレバーユニット
32 カンチレバー
【技術分野】
【0001】
本発明は、表面形状測定装置及び露光装置に関する。
【背景技術】
【0002】
原版と基板を同期走査するステップアンドスキャン方式を使用して、原版パターンを投影光学系を介して基板に露光する走査型露光装置は従来から知られている(例えば、特許文献1を参照)。走査型露光装置では、基板表面を露光中に投影光学系の像面位置に実時間で合わせ込む必要があるために、被露光位置が走査領域である露光スリットに差し掛かる前に基板の表面位置(高さ)と傾きを斜入射光を利用して計測する(例えば、特許文献2を参照)。
【0003】
また、基板表面形状の情報を含む白色干渉光を、複数の単一波長による干渉光に分解して光電変換し、得られた複数の干渉信号に対して高速フーリエ変換(FFT)を行い、基板表面形状を求める方法を基板の表面形状に適用することができる。測定原理は、非特許文献1に開示されている。白色干渉光を単一波長による干渉光に分離する方法として、互いに波長透過特性の異なるガラスフィルターを複数用意し、その組み合わせを変える方法、あるいは、光源であるレーザーの波長を可変にする方法が知られている。
【特許文献1】米国特許第4861162号明細書
【特許文献2】特開平06−260391号公報
【非特許文献1】郭 志徹他、「波長走査干渉計における信号処理」、精密光学会誌、日本、社団法人精密光学会、2003年、第69巻第6号第831頁
【発明の開示】
【発明が解決しようとする課題】
【0004】
近年の高解像度の要請からフォーカス及びチルトの計測にも高い精度が要求されており、従来の斜入射光を利用した計測方法では、基板の周辺パターンの影響やレジストの厚さむらによって所期の計測精度が得られなくなってきた。この場合、基板への入射角を80度以上にすれば基板の縦構造に起因する問題は解決することはできるが、光学系が複雑かつ大型になり、光路長が長くなることにより、外乱の影響を受け易くなる。
【0005】
一方、白色干渉光を使用した表面形状測定装置において、ガラスフィルターによる分離は光学系の一部に可動部を設けなければならないので表面形状測定装置が複雑になる。また、レーザーの発信波長を可変にする方法も、やはり表面形状測定装置が複雑化する。
【0006】
そこで、本発明は、単純な構成で高精度に被測定物体の表面形状を測定する表面形状測定装置及び露光装置を提供することを例示的な目的とする。
【課題を解決するための手段】
【0007】
本発明の一側面としての表面形状測定装置は、被測定物体の表面形状を測定する表面形状測定装置において、白色光を発する光源と、前記光源からの前記白色光を二光束に分割する光束分割手段と、当該光束分割手段によって分割されて前記被測定物体に向かう一方の光束の入射角を大きくし、前記白色光の波長以下の周期で形成されてモスアイ形状を有する第1反射防止部を有する第1プリズムと、当該光束分割手段によって分割されて参照光学素子の参照面に向かう他方の光束の入射角を大きくし、前記白色光の波長以下の周期で形成されてモスアイ形状を有する第2反射防止部を有する第2プリズムと、前記第1プリズムを経た前記被測定物体の表面形状の情報を含む反射光である物体光と前記第2プリズムを経た前記参照面の表面形状の情報を含む反射光である参照光とを重ね合わせて白色干渉光を生成する重ね合わせ手段と、前記白色干渉光を複数の波長毎に離散的に分離するリオフィルターと、前記リオフィルターが分離した前記白色干渉光を光電変換する光電変換素子と、前記光電変換素子の出力からパワースペクトルの分布を求め、当該パワースペクトルのピーク位置の情報を用いて前記基板の表面形状を求める演算部と、を有することを特徴とする。かかる表面形状測定装置を有する露光装置も本発明の一側面を構成する。
【発明の効果】
【0008】
本発明によれば、単純な構成で高精度に被測定物体の表面形状を測定する表面形状測定装置及び露光装置を提供することができる。
【発明を実施するための最良の形態】
【0009】
以下、添付図面を参照して、本発明の実施例を説明する。
【実施例1】
【0010】
以下、図1〜図6を参照して、実施例1の露光装置1について説明する。露光装置1は、原版(マスク又はレチクル)Rと基板(ウエハや液晶基板)Wとを同期走査して、原版パターンを投影光学系3を介して基板Wに露光する走査型露光装置である。投影光学系3は、原版パターンを基板に縮小投影する。なお、図1は、原版を照明する照明装置(光源及び照明光学系)は省略している。
【0011】
図1において、基板Wは、計測用ステージ5と露光用ステージ(基板ステージ)6との間をチャック7に吸着された状態で搬送される。露光用ステージ6では、投影光学系3によって導かれた原版Rからの光が基板W上に投影される。チャック7上では基板Wの位置計測のためのチャックマーク9が設けられ、計測用ステージ5では、チャックマーク9と基板Wとの3次元的な位置関係がアライメント検出系8を用いて計測される。その後、基板Wを吸着したままチャック7が露光用ステージ6に移動する。露光用ステージ6では、チャックマーク9の3次元的な位置がアライメント検出系8によって計測され、その計測結果及び基板Wとチャックマーク9との位置関係情報とを用いて露光用ステージ6における基板Wの3次元的な位置(XYZ方向の位置)が把握される。計測用ステージ5の周辺には表面形状測定装置10Aが配置されている。表面形状測定装置10Aは、被測定物体としての基板Wの表面形状を測定する。露光装置1は、図示しないコントローラを含み、表面形状測定装置の測定結果に基づいて原版Rと基板Wを同期走査する際に基板Wの投影光学系3の光源方向(Z方向)の位置をステージ6を介して調節する。
【0012】
図2は、表面形状測定装置10Aの断面図である。表面形状測定装置10Aは、光源11、投光光学系12、ミラー13、ハーフミラー14a及び14b、プリズム20A及び20B、光学フィルター16、制御部17、撮像素子18、記憶部19a、演算部19bを有する。
【0013】
光源11は、白色光を発する。白色光は、ある波長幅を有した光を意味し、白色の光を意味しない。光源11は、ハロゲンランプ、メタルハライドランプ、キセノンランプなどを使用することができる。基板W上のレジストは白色光によっては感光しない。本実施例では、光源11は、波長可変レーザーを使用しないので表面形状測定装置10Aの構成は単純になる。
【0014】
投光光学系12は、白色光を所望の形状に成形する。ミラー13は白色光を偏向する。ハーフミラー14aは、光源11からの白色光を二光束に分割する光束分割手段として機能する。
【0015】
プリズム(第1プリズム)20Aは、ハーフミラー14aによって分割されて基板Wに向かう一方の光束の入射角を大きくし、白色光の波長以下の周期で形成されてモスアイ(Moth−eye)形状の反射防止部(第1反射防止部)を有する。ハーフミラー14aを透過した光は、プリズム20Aに入射し、プリズム20Aの出射面で屈折した光は、基板Wに対して角度θ(θ≧80度)の入射角で斜め方向から入射する。なお、「プリズム20Aの出射面」とは、図2に示す二等辺三角形の形状をしたプリズム20Aの底辺部を意味する。入射角θは、基板Wの表面に垂直な高さ方向(Z方向)となす光線の角度である。
【0016】
図3は、図2における基板Wと入射光との関係を示す斜視図であり、基板W上の複数のショット領域をカバーすべく広範の領域Aを照明している。図1において、基板Wを反射した光は再度プリズム20Aに入射し、プリズム20Aの斜辺からプリズム20Aの外に出射し、ハーフミラー14bに到達する。
【0017】
プリズム(第2プリズム)20Bは、ハーフミラー14aによって分割されて参照光学素子15の参照面15aに向かう他方の光束の入射角を大きくし、白色光の波長以下の周期で形成されてモスアイ形状の反射防止部(第2反射防止部)を有する。プリズム20Bはプリズム20Aと同一構造を有する。図1において、参照面15aを反射した光は再度プリズム20Bに入射し、プリズム20Bの斜辺からプリズム20Bの外に出射し、ハーフミラー14bに到達する。
【0018】
ハーフミラー14bは、プリズム20Aを経た基板Wの表面形状の情報を含む反射光である物体光と、プリズム20Bを経た参照面15aの表面形状の情報を含む反射光である参照光とを重ね合わせて白色干渉光を生成する重ね合わせ手段として機能する。
【0019】
白色干渉光は、波長選択が可能な光学フィルター16を透過し、受光光学系41を介して撮像素子(検出部)18に入射する。
【0020】
本実施例の光学フィルター16は白色干渉光を複数の波長毎に離散的に分離するリオフィルター(LyotFilter)である。リオフィルターは特定波長の光だけを透過するフィルターである。リオフィルターは、透過する直線偏光の振動方向を平行にした複数個の偏光子の列の間に光学軸が端面に平行で厚さが2nd(n=0、1、2、・・・)の結晶板(例えば、水晶板)を光学軸が偏光子の振動方向に45°をなすように配置した構成を有する。計測用ステージ5が、基板Wの表面に垂直な方向(Z方向)に基板Wを駆動することによって光学フィルター16は、白色干渉光を複数の波長毎に離散的に分離する。このように、本実施例では、白色干渉光を複数の単一の波長の干渉光に分離する際に、ガラスフィルターを使用せず、本来備わっている計測用ステージ5を可動部としている。これにより、光学系の一部に可動部を設ける必要はなく、表面形状測定装置10Aの構成は単純になる。
【0021】
撮像素子18は、CCDから構成され、光学フィルター16が分離した前記白色干渉光を光電変換する光電変換素子として機能する。
【0022】
撮像素子18が出力する光電変換信号は、基板Wの表面形状に関する情報を有する干渉信号であり、記憶部19aに記録される。演算部19bは、記憶部19aが格納したデータからパワースペクトルの分布を求め、パワースペクトルのピーク位置の情報を用いて基板Wの表面形状を求める。
【0023】
以下、プリズム20Aについて説明する。なお、上述したように、プリズム20Bはプリズム20Aと同一構造を有するため、その説明を省略する。図4(a)は、プリズム20Aの側面図、図4(b)は図4(a)のA部の拡大図である。プリズム20Aの底辺部には、プリズム20Aを構成する屈折率Nのガラスと同じ屈折率、あるいは同等の屈折率を有する部材で構成され、その立体形状が測定光の波長以下のオーダーのモスアイ形状を有する反射防止部22Aが付加されている。モスアイ形状は、表面に数百ナノメートルスケールで規則的な突起配列を有する構造であり、微細凹凸の頂点における周期Pと測定光の波長λとの間に次式が成立する。
【0024】
【数1】
【0025】
微細凹凸パターンを物品の表面に設けると外界(空気)との境界部における急激で不連続な屈折率変化を、図4(c)に示す連続的で漸次推移する屈折率変化に変えることができるため、プリズム20Aの底辺部分における光反射が減る。特に、反射防止部22Aは、プリズム20Aの底辺を出射する光、あるいは、プリズム20Aの底辺に入射する物体光は、80度以上で入出射する光に対して最適化されている。反射防止部22Aは、図4(a)に示す円錐形状の複数の突起23AがXY平面で隙間無く(密に)配列されている形状を有する。しかし、別の実施例では、反射防止部22Bは、図4(d)に示すように、円錐台形状の複数の突起23BがXY平面で間隔Sをもって配列されている形状を有する。図4(d)において、P=500nm、S=330nm、h=430nm、t=100nmとした時、λ=780nm近辺での光に対して透過率60%以上の光量の光を得ることができる。
【0026】
次に、撮像素子18で検出される干渉信号に基づいて、演算部19bが基板Wの表面形状を求める方法について説明する。図2において、光源11から発せられた白色光のうち、ある特定の波長に着目し、その波長を有する光束の基板Wからの物体光の強度をio、参照面15aからの参照光の強度をiRとし、図3の測定点Pの位置をP(x’、y’)とする。すると、測定点Pでの干渉信号の強度は数式1で表すことができる。ここで、H(x’、y’)は、基板W上の点P(x’、y’)の基準面からの距離であり、2π/λで与えられる波数である。
【0027】
【数2】
【0028】
再び、図2を参照するに、ハーフミラー14b以降で発生した白色干渉光に対して、光学フィルター16によって分離された、複数の単一の波長による干渉光の干渉信号を撮像素子18にて検出する。光電検出する干渉光の波長を離散的に変化されば、測定面上のある一点、例えば、図3の測定点Pでの時系列の干渉信号i(nΔt)は、Hの逆数を周期とする周期関数となる。そして、この時系列の干渉信号i(t)を高速フーリエ変換(FFT)し、その結果であるパワースペクトルにおけるピーク値は、測定点の高さに応じて変化する結果となる。ここで、パワースペクトルのピーク値を有する周波数をfpeakとすると測定点Pでの絶対高さHは数式2で求めることができる。ここで、高さ計測の最小分解能Δhは光学フィルター16による波長変化の幅によって決まる数値である。
【0029】
【数3】
【0030】
図5及び図6に、上記方法に従って求めた、測定点Pの高さ計測の結果を示す。図5は、数式4で表される波数kを8.874から13.974の範囲(λの変化に換算すると0.708μm〜0.450μm)で0.02ステップで変化させた時の各ステップ毎に得られる干渉信号のPの位置での強度である。
【0031】
【数4】
【0032】
kの値を変化させる手段は、光学フィルター16を用いて行い、kの最大値、最小値及びステップ量(波長の変化幅)等は制御部17で任意に設定することができる。
【0033】
図6は、点Pの位置における波数変化に対する干渉信号の強度にFFTを行い、スペクトル分布を示したグラフである。図6において、スペクトルが最大値となる時のkの値はガウス曲線法にて求めた。そして、その値をkMax=16.900とし、kのステップ量Δk、基板Wへの物体光の入射角θ、FFTのサンプリング回数Snから求められる表面形状の高さ方向の分解能Δhを数式5で求める。
【0034】
【数5】
【0035】
図3の測定点Pの高さHpは以下に示す式から58.72umという結果を得た。ここで、Δk=0.02、θ=80度、Sn=256とした。数式6において、kMaxは数式4においてピークを与える波長λによって求まるkである。
【0036】
【数6】
【0037】
上記に述べた高さ計測は、図3の測定点Pでの結果であるが、測定点P以外の任意の場所で同様な高さ計測を行えば、二次元領域の高さ計測が可能となる。本実施例は、光学フィルター16を、物体光と参照光がそれぞれの反射面である基板W、及び参照面15aを反射した後の光路中に設置したが、この設置位置に限定されない。例えば、光学フィルター16は、物体光、参照光が反射面に到達する前の光路中、例えば、ミラー13とハーフミラー14aの間の光路中に設置してもよい。
【0038】
このように、演算部19bは、パワースペクトルの分布を求め、特定位置についてピークを与える波長を選択し、数式6から基板Wの表面形状を求める。なお、光学フィルター16が与える波長は離散的であるために、本実施例の演算部19bは、離散的な計測点の間を補完している。
【実施例2】
【0039】
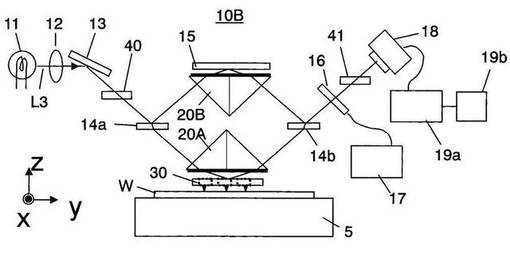
以下、図7〜図11を参照して、実施例2について説明する。本実施例も図1に示す露光装置1を共通に使用することができるが、本実施例は、表面形状測定装置10Aの代わりに表面形状測定装置10Bを使用する。表面形状測定装置10Bは、表面形状測定装置10Aにマルチカンチレバーユニット30を更に有する点で相違する。
【0040】
マルチカンチレバーユニット30は、平板状の保持部31と、複数のカンチレバー35と、を有し、プリズム20Aと基板Wとの間に設けられている。
【0041】
保持部31は、平板形状を有し、ハーフミラー14aによって分割された一方の光束の光路に対応する部分に点線で示す直方体形状の穴32を有する。
【0042】
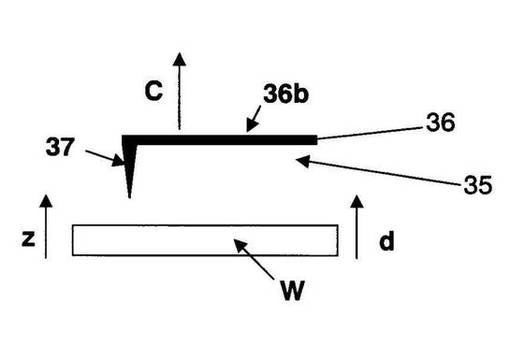
複数のカンチレバー35は、保持部31の底面31aに取り付け部36aにおいて片持ち支持された基部36と、基部36に固定されて基板Wの表面に接触可能な計測プローブ37と、を各々有する。計測プローブ37は、取り付け部36aとは反対の端部である基部36の先端に取り付けられている。計測プローブ37は、本実施例では円錐形状を有し、円錐の先端部が下になるように(即ち、底円において)基部36に取り付けられている。本実施例では、物体光は、カンチレバー35の基部36の背面36bから反射された光である。背面36bにおける反射位置36cは、基部36の背面36bの略中央部であるが、測定したいのは、背面36bにおいてヘッド部である計測プローブ37が取り付けられている部分とは裏側のヘッド位置36dである。このため、本実施例の演算部19bは、実際の反射位置36cをヘッド位置36dに変換するためのキャリブレーションを行う。
【0043】
図7は、マルチカンチレバーユニット30の複数のカンチレバー35の配置例を示している。例えば、一辺が35mmの正方形領域内にカンチレバー35を1mm間隔で縦横に各36個(合計1296個)配置している。本実施例は、このようにカンチレバー35を複数配列したものをマルチカンチレバーと呼んでいる。図7では、複数のカンチレバー35は二次元的に配置されているが、一次元的に配置されてもよい。
【0044】
カンチレバー35は、市販の原子間力顕微鏡(AFM)に使用されており、測定対象とカンチレバー35との間に作用する原子間力(ファンデルワールス力)を利用して測定対象のZ方向(紙面垂直方向)位置を測定する。
【0045】
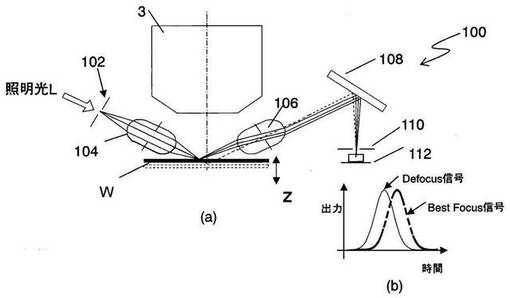
図12(a)に示すような従来のフォーカス・チルト検出系100においては、斜入射照明光(複数の光束)Lでマルチマーク102を照明し、そこからの光を投射光学系104が基板表面に投射し、受光光学系106がその反射光を受光する。基板表面(正しくは基板に塗布されたレジスト表面)に高入射角度で照明光Lを入射させ、反射光をガルバノミラー108で走査させ、スリット110を透過した光を検出部112で光電変換する。検出部112の出力の信号を信号処理し、図12(b)に示すように、デフォーカス信号がベストフォーカス信号となるように基板Wを矢印で示す光軸方向に駆動してフォーカス制御を行う。また、異なる位置の高さ計測情報から露光すべき基板面のチルトを算出する。
【0046】
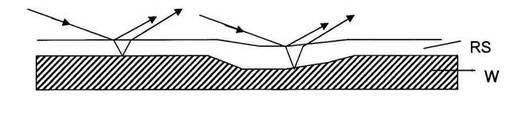
しかし、図13に示すように、周辺回路パターンやスクライブライン近傍においては、レジストRS表面の段差は焦点深度に比べて小さいが、フォーカス計測にとってはその計測結果に大きな誤差が発生してしまう。誤差は、レジスト表面の傾斜角度の影響により、フォーカス検出系に用いる測定光の基板からの反射光がレジスト内の多重反射やレジスト表面形状の影響を受けた屈折により、正反射角度からのずれが発生することに起因する。また、ICパターンの粗密の違いによっても反射率に差が生じる。そのため、フォーカス・チルト検出系100は、照明光Lの角度を80度以上として信号歪を軽減してオフセットの発生を防いでいるが、代わりに、光学系の引き廻しが複雑で大型になり、光路長が長くなって外乱の影響を受け易くなる。
【0047】
本実施例では、原子間力を利用することにより、光学的なオフセットの発生を防止することができ、基板上に塗布されたレジストの表面形状(表面高さの変化)を正確に計測することができる。
【0048】
図8は、複数のカンチレバー35が基板表面を計測している様子を示す側面図である。カンチレバー35の計測方式は光テコ方式と呼ばれ、計測プローブ37と基板W表面との間に作用する原子間力によって基板W表面の高さ位置に応じて上下移動する。カンチレバー35の基部36の背面36bに斜入射光L1を入射させ、カンチレバー35の背面36bからの反射光をCCD等の光検出器39によって検出することにより、カンチレバー35の高さ、即ち、基板Wの表面形状を計測する。
【0049】
図9は、マルチカンチレバーユニット30を有する表面形状測定装置10Bの断面図である。光源11から発せられた測定光L3は、ミラー13により偏向され、マルチスポット発生部40によって分割され、ハーフミラー14aで、物体光と参照光の2方向に光路が分割される。ハーフミラー14aを透過した物体光はプリズム20Aを透過して、マルチカンチレバーユニット30の背面36bに斜入射光L1として入射される。プリズム20Aは反射防止部22Aを有し、プリズム20Aの底辺部分を光が透過する際に、その入出射角度が80度以上の超斜入射角度の場合でも光量を損失することなく各カンチレバー35の背面36bに光を照射することができる。
【0050】
カンチレバー35の背面36bからの反射光は、ハーフミラー14b、光学フィルター16を透過し、受光光学系41により撮像素子18の受光面へと導かれる。一方、ハーフミラー14aが分割した他方の光は、プリズム20Bを透過し、80度以上の超斜入射角度で参照面15aに照射され、その反射光はハーフミラー14bを反射し、光学フィルター16、受光光学系41を経て撮像素子18の受光面へと導かれる。市販のAFMは光検出器として四分割センサーが用いるが、本実施例は、二次元撮像素子(例えば、エリア型CCD等)を用いる。
【0051】
基板Wの高さに応じてカンチレバー35の背面36bの高さ(Z方向)位置は変化するので、各カンチレバー35の高さを、実施例1で述べた方法で測定すれば基板Wの表面形状を測定することができる。例えば、1つのカンチレバー35に着目すると、カンチレバー35の背面36bに80度以上の超斜入射角度で照射された物体光と、参照面15aに超斜入射された参照光を、ハーフミラー14b以降で重ね合わせて白色干渉光を生成する。そして、光学フィルター16を用いて白色干渉光から、単一波長による干渉光を時系列的に複数の波長において分離して光電変換を行い、各波長毎の干渉信号を記憶部19aに記憶する。演算部19bは、これらの複数の干渉信号に対してFFTを行い、パワースペクトルのピーク位置を有する波数kMax(=2π/λn、nはサンプリング回数)を求める。そして、波数kMaxと数式5及び6で求められる高さ方向の分解能の値からカンチレバー35の背面36bの高さ変化を求めることができ、即ち、基板Wの表面形状を知ることができる。
【0052】
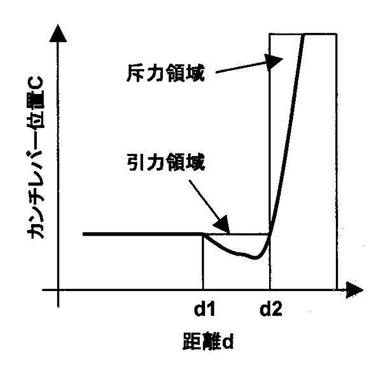
ここで、図10及び図11を用いて、カンチレバー35による基板Wの表面形状測定の原理を説明する。図10に示すように、ある任意の位置を基準としたZ方向におけるカンチレバー35の位置(例えば、カンチレバー35の背面36bの位置)を位置C、基板Wの計測点の表面位置を位置dとすると、両者の関係は図11に示すようになる。図11は、位置Cに保持したカンチレバー35に基板Wを徐々に近接させた場合のカンチレバー35の位置Cと基板Wの表面位置dとの関係を示すグラフ(フォースカーブ)である。ここで、図10中のZ方向(図中上方向)が正方向である。
【0053】
カンチレバー35が基板Wから充分離れている場合は、基板Wをカンチレバー35に近づけてもカンチレバー35の位置Cは変化しない。しかし、ある程度まで近接して基板Wの表面位置が位置d1になると(このとき、カンチレバー35のプローブ37と基板Wの表面とは所定距離となっている)、双方に原子間力が作用し始めて互いに引き合う。その後、基板Wが更にカンチレバー35に近づくと、カンチレバー35が引力で基板表面へと引きつけられ、カンチレバー35の位置Cの値が徐々に小さくなる(引力領域)。更に、基板Wがカンチレバー35に近づき、基板Wの表面位置が位置d2になると、今度は原子間力によって双方が逆に反発し合う。基板Wが更にカンチレバー35に近づくと、カンチレバー35が斥力で基板表面から遠ざかろうとし、カンチレバー35の位置Cの値が急激に大きくなる(斥力領域)。本実施例は、この斥力領域における反発特性を利用するためにカンチレバー35と基板Wとの距離d2以下となるように配置する。もちろん引力領域における引力特性を利用することも可能であるが、引力領域では1つのカンチレバー35の位置Cに対して対応する基板Wの位置が複数となる場合がある。従って、カンチレバー35の位置Cから一義的に基板Wの位置が決定されない場合があるので注意が必要である。カンチレバー35と基板Wとの距離を設定するに際しては、基板Wの表面形状の高さバラツキを考慮する必要がある。基板Wの表面形状の高さバラツキの値よりもカンチレバー35と基板Wとの距離を小さくしてしまうと、カンチレバー35のプローブ37が基板表面に接触してしまう虞があるからである。
【0054】
実施例2は、マルチカンチレバーユニット30を用いて非光学的な計測と光学的な計測とを組み合わせている。このため、基板上に塗布されたレジストの表面形状を光学的な方法のみによって計測する際に生じるオフセットが発生せず、ナノメートルオーダーでの高精度計測を行うことができる。
【0055】
以上説明した表面形状測定装置10A及び10Bは、構成が単純かつ小型で、超斜入射光であっても光量の損失が少ない光学系を構成することができる。また、波長を選択するための光学系も可動部を簡素化することができる。以上の一連の効果により、基板表面に塗布されたレジストによる計測誤差を受けることなく、縮小される焦点深度に対し高いフォーカス補正精度を達成し、一枚の基板あたりの歩留まり向上を得ることが可能である。
【0056】
なお、本実施例のデバイス製造方法は以下のようになる。即ち、デバイス(半導体集積回路素子、液晶表示素子等)は、前述のいずれかの実施例の露光装置を使用して感光剤を塗布した基板(ウエハ、ガラスプレート等)を露光する工程と、その基板を現像する工程と、他の周知の工程と、を経ることにより製造される。
【図面の簡単な説明】
【0057】
【図1】実施例1の露光装置の断面図である。
【図2】図1に示す露光装置の表面形状測定装置の断面図である。
【図3】図2に示す表面形状測定装置の基板と物体光との関係を異なる角度から見た斜視図である。
【図4】図4(a)は図3に示すプリズムの側面図、図4(b)は図4(a)の部分拡大図、図4(c)は屈折率変化を示す図、図4(d)は図4(b)の変形例の側面図である。
【図5】図3に示す測定点の高さ計測の結果を示す図である。
【図6】図3に示す測定点の高さ計測の結果を示す図である。
【図7】実施例2の表面形状測定装置のカンチレバーの配置を示す図である。
【図8】複数のカンチレバーが基板表面を計測している様子を示す側面図である。
【図9】実施例2の表面形状測定装置の断面図である。
【図10】図9の表面形状測定装置のカンチレバーの断面図である。
【図11】カンチレバーと基板との距離とカンチレバーの位置との関係を示すグラフである。
【図12】従来のフォーカス・チルト検出系の図である。
【図13】図12に示すフォーカス・チルト検出系の問題を説明するための断面図である。
【符号の説明】
【0058】
10A、10B 表面形状測定装置
11 光源
14a、14b ハーフミラー
16 光学フィルター
17 制御部
18 撮像素子(光電変換素子)
19a 記憶部
19b 演算部
20A、20B プリズム
30 マルチカンチレバーユニット
32 カンチレバー
【特許請求の範囲】
【請求項1】
被測定物体の表面形状を測定する表面形状測定装置において、
白色光を発する光源と、
前記光源からの前記白色光を二光束に分割する光束分割手段と、
当該光束分割手段によって分割されて前記被測定物体に向かう一方の光束の入射角を大きくし、前記白色光の波長以下の周期で形成されてモスアイ形状を有する第1反射防止部を有する第1プリズムと、
当該光束分割手段によって分割されて参照光学素子の参照面に向かう他方の光束の入射角を大きくし、前記白色光の波長以下の周期で形成されてモスアイ形状を有する第2反射防止部を有する第2プリズムと、
前記第1プリズムを経た前記被測定物体の表面形状の情報を含む反射光である物体光と前記第2プリズムを経た前記参照面の表面形状の情報を含む反射光である参照光とを重ね合わせて白色干渉光を生成する重ね合わせ手段と、
前記白色干渉光を複数の波長毎に離散的に分離するリオフィルターと、
前記リオフィルターが分離した前記白色干渉光を光電変換する光電変換素子と、
前記光電変換素子の出力からパワースペクトルの分布を求め、当該パワースペクトルのピーク位置の情報を用いて前記基板の表面形状を求める演算部と、
を有することを特徴とする表面形状測定装置。
【請求項2】
前記表面形状測定装置は、前記被測定物体の表面に垂直な方向に前記被測定物体を駆動するステージを更に有し、前記ステージが前記被測定物体を前記方向に駆動することによって前記リオフィルターは前記白色干渉光を複数の波長毎に離散的に分離することを特徴とする請求項1に記載の表面形状測定装置。
【請求項3】
前記リオフィルターは、前記重ね合わせ手段と前記光電変換素子との間に配置されていることを特徴とする請求項1に記載の表面形状測定装置。
【請求項4】
前記リオフィルターは、前記光源と前記光束分割手段との間に配置されていることを特徴とする請求項1に記載の表面形状測定装置。
【請求項5】
前記一方の光束の光路に対応する部分に穴を有する保持部と、
前記保持部に片持ち支持された基部と、当該基部に固定されて前記被測定物体に接触可能な計測プローブと、を各々有する複数のカンチレバーと、
を有し、前記第1プリズムと前記被測定物体との間に設けられたマルチカンチレバーユニットを更に有し、
前記物体光は、前記カンチレバーの前記基部から反射された光であることを特徴とする請求項1に記載の表面形状測定装置。
【請求項6】
前記リオフィルターが分離する波長の最小値、最大値及び波長の変化幅を設定する制御部を更に有することを特徴とする請求項1に記載の表面形状測定装置。
【請求項7】
原版と基板を同期走査して前記原版のパターンを前記基板に露光する露光装置であって、
被測定物体としての前記基板の表面形状を測定する、請求項1〜6のうちいずれか一項に記載の表面形状測定装置と、
前記表面形状測定装置の測定結果に基づいて前記原版と前記基板を同期走査する際に前記基板の位置を調節する基板ステージと、
を有することを特徴とする露光装置。
【請求項8】
請求項7に記載の露光装置を使用して基板を露光する工程と、
露光された前記基板を現像する工程と、
を有することを特徴とするデバイス製造方法。
【請求項1】
被測定物体の表面形状を測定する表面形状測定装置において、
白色光を発する光源と、
前記光源からの前記白色光を二光束に分割する光束分割手段と、
当該光束分割手段によって分割されて前記被測定物体に向かう一方の光束の入射角を大きくし、前記白色光の波長以下の周期で形成されてモスアイ形状を有する第1反射防止部を有する第1プリズムと、
当該光束分割手段によって分割されて参照光学素子の参照面に向かう他方の光束の入射角を大きくし、前記白色光の波長以下の周期で形成されてモスアイ形状を有する第2反射防止部を有する第2プリズムと、
前記第1プリズムを経た前記被測定物体の表面形状の情報を含む反射光である物体光と前記第2プリズムを経た前記参照面の表面形状の情報を含む反射光である参照光とを重ね合わせて白色干渉光を生成する重ね合わせ手段と、
前記白色干渉光を複数の波長毎に離散的に分離するリオフィルターと、
前記リオフィルターが分離した前記白色干渉光を光電変換する光電変換素子と、
前記光電変換素子の出力からパワースペクトルの分布を求め、当該パワースペクトルのピーク位置の情報を用いて前記基板の表面形状を求める演算部と、
を有することを特徴とする表面形状測定装置。
【請求項2】
前記表面形状測定装置は、前記被測定物体の表面に垂直な方向に前記被測定物体を駆動するステージを更に有し、前記ステージが前記被測定物体を前記方向に駆動することによって前記リオフィルターは前記白色干渉光を複数の波長毎に離散的に分離することを特徴とする請求項1に記載の表面形状測定装置。
【請求項3】
前記リオフィルターは、前記重ね合わせ手段と前記光電変換素子との間に配置されていることを特徴とする請求項1に記載の表面形状測定装置。
【請求項4】
前記リオフィルターは、前記光源と前記光束分割手段との間に配置されていることを特徴とする請求項1に記載の表面形状測定装置。
【請求項5】
前記一方の光束の光路に対応する部分に穴を有する保持部と、
前記保持部に片持ち支持された基部と、当該基部に固定されて前記被測定物体に接触可能な計測プローブと、を各々有する複数のカンチレバーと、
を有し、前記第1プリズムと前記被測定物体との間に設けられたマルチカンチレバーユニットを更に有し、
前記物体光は、前記カンチレバーの前記基部から反射された光であることを特徴とする請求項1に記載の表面形状測定装置。
【請求項6】
前記リオフィルターが分離する波長の最小値、最大値及び波長の変化幅を設定する制御部を更に有することを特徴とする請求項1に記載の表面形状測定装置。
【請求項7】
原版と基板を同期走査して前記原版のパターンを前記基板に露光する露光装置であって、
被測定物体としての前記基板の表面形状を測定する、請求項1〜6のうちいずれか一項に記載の表面形状測定装置と、
前記表面形状測定装置の測定結果に基づいて前記原版と前記基板を同期走査する際に前記基板の位置を調節する基板ステージと、
を有することを特徴とする露光装置。
【請求項8】
請求項7に記載の露光装置を使用して基板を露光する工程と、
露光された前記基板を現像する工程と、
を有することを特徴とするデバイス製造方法。
【図1】


【図2】
【図3】

【図4】

【図5】
【図6】
【図7】

【図8】

【図9】
【図10】
【図11】
【図12】
【図13】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【公開番号】特開2009−276269(P2009−276269A)
【公開日】平成21年11月26日(2009.11.26)
【国際特許分類】
【出願番号】特願2008−129231(P2008−129231)
【出願日】平成20年5月16日(2008.5.16)
【出願人】(000001007)キヤノン株式会社 (59,756)
【Fターム(参考)】
【公開日】平成21年11月26日(2009.11.26)
【国際特許分類】
【出願日】平成20年5月16日(2008.5.16)
【出願人】(000001007)キヤノン株式会社 (59,756)
【Fターム(参考)】
[ Back to top ]